
車両制御装置

【課題】車両総重量や車両重心位置の変化に対応させた適切な車両挙動制御を行うこと。
【解決手段】設定した目標制御量又は/及び目標制御タイミングで車両10の挙動制御を行う車両制御装置において、車両総重量を推定又は検出する重量演算手段1eと、車両重心位置を推定又は検出する重心位置演算手段1dと、車両10の旋回特性を表す旋回特性指数値を車両総重量と車両重心位置に応じて設定する旋回特性指数設定手段1cと、車両の走行状態を表す走行状態量と車両総重量及び車両重心位置に応じた旋回特性指数値とに基づいて車両10が所望の旋回姿勢となる目標制御量又は/及び目標制御タイミングを設定する旋回制御手段1bと、を設けること。
【解決手段】設定した目標制御量又は/及び目標制御タイミングで車両10の挙動制御を行う車両制御装置において、車両総重量を推定又は検出する重量演算手段1eと、車両重心位置を推定又は検出する重心位置演算手段1dと、車両10の旋回特性を表す旋回特性指数値を車両総重量と車両重心位置に応じて設定する旋回特性指数設定手段1cと、車両の走行状態を表す走行状態量と車両総重量及び車両重心位置に応じた旋回特性指数値とに基づいて車両10が所望の旋回姿勢となる目標制御量又は/及び目標制御タイミングを設定する旋回制御手段1bと、を設けること。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の旋回時等の走行安定性を図る車両制御装置に関する。
【背景技術】
【0002】
従来、旋回時の車両の挙動を安定させる技術が知られている。例えば、下記の特許文献1には、車速や操舵輪の転舵角に応じて目標旋回制御量(目標ヨーレート)を求め、この目標旋回制御量(目標ヨーレート)と実際の旋回制御量(実際のヨーレート)との差に応じた目標制御量を設定して旋回制御を行う技術について開示されている。更に、この特許文献1には、旋回特性を表すスタビリティファクタに基づき目標旋回制御量(目標ヨーレート)の演算を行うことが開示されており、そのスタビリティファクタが車速等に応じて変更される点も記載されている。
【0003】
尚、下記の特許文献2には、車速や車両の重量に基づいて操舵アシスト制御時の操舵力を求める技術が開示されている。また、下記の特許文献3には、重量負荷変数に基づいて重心位置変数(重心位置)を推定し、車両のヨーレートを調整する運転者支援システムの制御に重心位置変数が利用される技術について開示されている。また、下記の特許文献4には、車両の重量や重心位置に応じて車両横加速度の閾値を調整し、この閾値を用いて車体のロール制御を行う技術について開示されている。また、下記の特許文献5,6には、車体総重量や車両の重心位置に応じて横すべり角を推定する技術が開示されている。また、下記の特許文献7には、車両上下方向の重心位置の変化に基づいてトラクション制御時の車両の運動状態を推定する技術について開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−95085号公報
【特許文献2】特開平11−78952号公報
【特許文献3】特表2008−520981号公報
【特許文献4】特開2006−168441号公報
【特許文献5】特開平11−321602号公報
【特許文献6】特開平11−321603号公報
【特許文献7】特開平4−237637号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、車両は、乗員の乗り降りや荷物の積み卸しによって車両総重量(車両そのものの重量+乗員等の重量)が変化する。そして、この車両総重量の変化は、車両重心位置にも変化を生じさせ、旋回特性に影響を与える。これが為、旋回特性を表すスタビリティファクタ等の旋回特性指数値は、厳密に云えば、その車両総重量、そして、車両重心位置の変化によって異なる値を示す。従って、その車両総重量や車両重心位置が設計値や設定値に対して変わると、目標旋回制御量(目標ヨーレート)が旋回制御の為に本当に必要とされる値にならないので、その車両総重量や車両重心位置の変化が十分に考慮されていない従来は、目標制御量や目標制御タイミング等の目標制御値のずれにより適切な旋回制御を行えない可能性があった。
【0006】
そこで、本発明は、かかる従来例の有する不都合を改善し、車両総重量や車両重心位置の変化に対応させた適切な車両挙動制御を行い得る車両制御装置を提供することを、その目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成する為、請求項1記載の発明では、設定した目標制御量又は/及び目標制御タイミングで車両の挙動制御を行う車両制御装置において、車両総重量の変化に応じて前記目標制御量又は/及び前記目標制御タイミングを変更する車両制御手段を設けている。
【0008】
また、上記目的を達成する為、請求項2記載の発明では、設定した目標制御量又は/及び目標制御タイミングで車両の挙動制御を行う車両制御装置において、車両総重量が重くなるほど車両重心位置が車両後方に移ると判断し、その車両重心位置に応じて前記目標制御量又は/及び前記目標制御タイミングを変更する車両制御手段を設けている。
【0009】
また、上記目的を達成する為、請求項3記載の発明では、設定した目標制御量又は/及び目標制御タイミングで車両の挙動制御を行う車両制御装置において、車両総重量の変化と当該車両総重量の変化に伴う車両重心位置の変化に応じて前記目標制御量又は/及び前記目標制御タイミングを変更する車両制御手段を設けている。
【0010】
例えば、請求項4記載の発明の如く、この請求項3記載の車両制御装置において、車両総重量を推定又は検出する重量演算手段と、車両重心位置を推定又は検出する重心位置演算手段と、車両の旋回特性を表す旋回特性指数値を車両総重量と車両重心位置に応じて設定する旋回特性指数設定手段と、を設ける。そして、車両制御手段については、車両の走行状態を表す走行状態量と車両総重量及び車両重心位置に応じた旋回特性指数値とに基づいて車両が所望の旋回姿勢となる目標制御量を設定するように構成することが望ましい。これにより、車両総重量や車両重心位置の変化に応じた目標制御量が設定されることになるので、車両は、この目標制御量で制御することによって、車両総重量や車両重心位置の変化、そして、これに伴う等価コーナリングパワー及びヨー慣性モーメントの変化が考慮された適切な旋回姿勢で旋回させることができる。
【0011】
また、その車両制御手段は、請求項5記載の発明の如く、車両の走行状態を表す走行状態量並びに車両総重量及び車両重心位置に応じた旋回特性指数値に基づいて所望の旋回姿勢となる目標旋回状態量を求め、この目標旋回状態量と実際の旋回状態量との差に応じて目標制御量を設定するように構成することが望ましい。
【0012】
また、重心位置演算手段は、請求項6記載の発明の如く、車両総重量の変化量が増量側に大きくなるほど当該変化量分だけ車両重心位置が車両後方に移動したと推定するように構成することが望ましい。例えば、乗員や荷物の積載位置が殆ど変化しない使用形態の車両においては、その荷物の量に応じて車両総重量や車両重心位置が変化する。そして、一般的な車両においては、荷室が例えば設計値としての基準となる車両重心位置よりも車両後方に存在している。これが為、かかる車両においては、車両総重量が増えるほどその増量分だけ車両重心位置が車両後方に移動することが判っているので、車両総重量の変化に基づいて車両重心位置を推定させることで演算処理の迅速化を図ることができる。
【発明の効果】
【0013】
車両総重量や車両重心位置の変化は、等価コーナリングパワー及びヨー慣性モーメントを変化させるので、旋回時の旋回姿勢に影響を与える。これが為、本発明に係る車両制御装置は、車両総重量や車両重心位置の変化に応じて旋回制御時の目標制御量又は/及び目標制御タイミングを変更することによって、車両を安定した旋回姿勢で、つまり安定した挙動で旋回させることができる。また、その車両総重量や車両重心位置の変化は、前軸や後軸の荷重を変化させ、これにより駆動輪の荷重を減少させたならば、トラクション制御の際に駆動輪の空転を適切に抑えにくくなる。これが為、本発明に係る車両制御装置は、車両総重量や車両重心位置の変化に応じてトラクション制御時の目標制御量又は/及び目標制御タイミング(駆動輪の目標制動力等)を変更することによって、駆動輪の空転を抑え、車両を安定した挙動で発進や加速させることができる。
【図面の簡単な説明】
【0014】
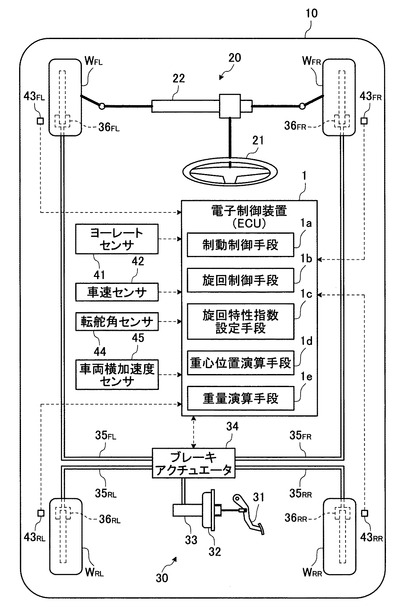
【図1】図1は、本発明に係る車両制御装置と適用対象の車両の一例を示す図である。
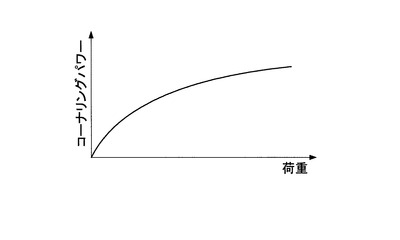
【図2】図2は、荷重とコーナリングパワーの関係について説明する図である。
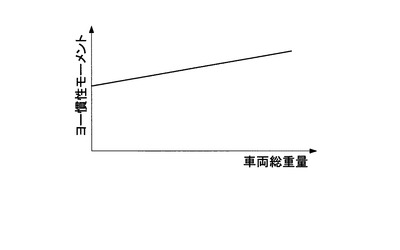
【図3】図3は、車両総重量とヨー慣性モーメントの関係について説明する図である。
【図4】図4は、車両の線形2輪モデルの簡易図である。
【図5】図5は、実施例1の設定動作について説明するフローチャートである。
【図6】図6は、実施例1における前後重心位置のマップデータの一例を示す図である。
【図7】図7は、実施例1におけるスタビリティファクタのマップデータの一例を示す図である。
【図8】図8は、実施例1におけるヨーレート応答遅れ係数のマップデータの一例を示す図である。
【図9】図9は、実施例2におけるスタビリティファクタのマップデータの一例を示す図である。
【図10】図10は、実施例2におけるヨーレート応答遅れ係数のマップデータの一例を示す図である。
【図11】図11は、実施例2の学習動作について説明するフローチャートである。
【図12】図12は、実施例2における更新されたスタビリティファクタのマップデータの一例を示す図である。
【図13】図13は、実施例2における更新されたヨーレート応答遅れ係数のマップデータの一例を示す図である。
【発明を実施するための形態】
【0015】
以下に、本発明に係る車両制御装置の実施例を図面に基づいて詳細に説明する。尚、この実施例によりこの発明が限定されるものではない。
【実施例】
【0016】
[実施例1]
本発明に係る車両制御装置の実施例1を図1から図8に基づいて説明する。
【0017】
本実施例1の車両制御装置は、図1に示す電子制御装置(ECU)1の一機能として用意されたものとする。その電子制御装置1は、図示しないCPU(中央演算処理装置)、所定の制御プログラム等を予め記憶しているROM(Read Only Memory)、そのCPUの演算結果を一時記憶するRAM(Random Access Memory)、予め用意された情報等を記憶するバックアップRAM等によって構成されている。
【0018】
この車両制御装置が適用される車両10は、図示しないエンジンやモータ等の動力源からの出力(出力トルク)を変速機等の動力伝達装置を介して駆動輪(例えば後輪WRL,WRR)に車輪駆動力として伝えるものであり、FR(フロントエンジン・リアドライブ)車、FF(フロントエンジン・フロントドライブ)車、四輪駆動車の別を問わず、また、ミッドシップエンジンやリヤエンジンの車両、その動力源としてエンジンとモータの双方を備えた所謂ハイブリッド車両でもよい。
【0019】
この車両には、前輪WFL,WFRを操舵輪として転舵させる転舵装置20が設けられている。この転舵装置20は、運転者による操舵操作子たるステアリングホイール21と、このステアリングホイール21の操舵操作に伴い駆動する転舵角付与手段22と、を備えている。例えば、その転舵角付与手段22は、図示しないラックギヤやピニオンギヤを備えた所謂ラック&ピニオン機構によるものである。
【0020】
また、この車両10には、車体を減速又は停止させる制動装置30が設けられている。この制動装置30は、運転者が操作するブレーキペダル31と、このブレーキペダル31に入力された運転者のブレーキ操作に伴う操作圧力(ペダル踏力)を所定の倍力比で倍化させる制動倍力手段(ブレーキブースタ)32と、この制動倍力手段32により倍化されたペダル踏力をブレーキペダル31の操作量に応じたブレーキ液圧(以下、「マスタシリンダ圧」という。)へと変換するマスタシリンダ33と、そのマスタシリンダ圧をそのまま又は車輪毎に調圧するブレーキ液圧調整手段(以下、「ブレーキアクチュエータ」という。)34と、このブレーキアクチュエータ34を経たブレーキ液圧が伝えられる各車輪WFL,WFR,WRL,WRRのブレーキ液圧配管35FL,35FR,35RL,35RRと、この各ブレーキ液圧配管35FL,35FR,35RL,35RRのブレーキ液圧が各々供給されて夫々の車輪WFL,WFR,WRL,WRRに制動力を発生させる例えばディスクロータやキャリパ等からなる制動力発生手段36FL,36FR,36RL,36RRと、によって構成される。この制動装置30は、夫々の車輪WFL,WFR,WRL,WRRに対して個別の大きさの制動力を発生させることができるものであり、この車輪WFL,WFR,WRL,WRR毎の制動力制御を電子制御装置1の制動制御手段1aがブレーキアクチュエータ34を制御することで実現させる。
【0021】
電子制御装置1には、設定した目標制御量又は/及び目標制御タイミング等の目標制御値に基づいて車両10の挙動を安定させる為の制御(以下、「車両挙動制御」という。)を行う車両制御手段が設けられている。本実施例1においては、その車両挙動制御として、旋回時の挙動の安定化を図る旋回制御について例示する。従って、この電子制御装置1には、その車両制御手段たる旋回制御手段1bが設けられている。
【0022】
ここで例示する旋回制御手段1bは、実際の旋回状態量(以下、「実旋回状態量」という。)と目標旋回状態量との差に応じて所望の旋回姿勢となるよう目標制御値(目標制御量又は/及び目標制御タイミング等)の設定を行い、その目標制御値で車両10を制御して旋回姿勢を安定させるように構成されている。その目標旋回状態量とは、車両10が所望の旋回姿勢になっているときの旋回状態量のことである。ここでは、実旋回状態量としての実際のヨーレート(以下、「実ヨーレート」という。)γrをヨーレートセンサ41で検出すると共に、目標旋回状態量としての目標ヨーレートγtを車両10の走行状態に基づいて求め、この実ヨーレートγrと目標ヨーレートγtとを比較する。
【0023】
その目標ヨーレートγtは、車両10の諸元(ホイールベースL)と、車両10の走行状態を表す走行状態量(車速V、操舵輪たる前輪WFL,WFRの転舵角θst、車両横加速度Gy)と、車両10の旋回特性を表す旋回特性指数値(スタビリティファクタKH、ヨーレート応答遅れ係数TP)と、を例えば下記の式1に代入して演算される。この式1の「s」は、ラプラス演算子である。
【0024】
【数1】

【0025】
ホイールベースLの情報は、車両固有の数値であり、予め電子制御装置1のROM等に記憶させておく。また、車速Vの情報は、車速検出手段によって検出させる。この車速検出手段としては、例えば、車速そのものを検出する車速センサ42や、各車輪WFL,WFR,WRL,WRRの車輪速度を検出する車輪速度センサ43FL,43FR,43RL,43RRを利用できる。転舵角θstは、例えば転舵角付与手段22に設けた転舵角センサ44によって検出させる。車両横加速度Gyは、車両横方向の加速度を検出する車両横加速度センサ45によって検出させる。
【0026】
また、スタビリティファクタKHとは、車両総重量M、ホイールベースL(設計値)、前軸から重心までの距離Lf、後軸から重心までの距離Lr、前輪FL,FRの等価コーナリングパワーCpf及び後輪WRL,WRRの等価コーナリングパワーCprによって車両10の旋回特性を表したものである。一方、ヨーレート応答遅れ係数Tpとは、車速Vに依存する時定数を持つ1次遅れ系の車速Vに係る係数のことであり、ホイールベースL(設計値)、前輪WFL,WFRの等価コーナリングパワーCpf、後輪WRL,WRRの等価コーナリングパワーCpr及びヨー慣性モーメントIzによって車両10の旋回特性を表したものである。これらスタビリティファクタKHやヨーレート応答遅れ係数TPは、一般に、車両10のモデルを線形2輪モデルとした下記の式2,3を用いて各々算出できる。
【0027】
【数2】
【0028】
【数3】
【0029】
ここで、従来においては、車両10の重心位置を不変としている。これが為、前軸から重心までの距離Lfや後軸から重心までの距離Lrについては、設計値として予め用意されている。
【0030】
また、従来においては、車両総重量Mについても不変として考えているので設計値として用意されており、これが為、前輪WFL,WFRと後輪WRL,WRRの夫々の等価コーナリングパワーCpf,Cprの情報やヨー慣性モーメントIzの情報が車両固有の一定値として用意されている。
【0031】
旋回制御手段1bは、車両10の諸元や走行状態量等に基づいて目標ヨーレートγtを求め、検出された実ヨーレートγrとの比較を行う。そして、この旋回制御手段1bは、実ヨーレートγrの方が目標ヨーレートγtよりも大きければ、動力源の出力を絞ると共に車両前側の旋回外輪に制動力を発生させ、実ヨーレートγrの方が目標ヨーレートγtよりも小さければ、動力源の出力を絞ると共に車両後側の旋回内輪に制動力を発生させる。その制御対象の車輪に対しては、実ヨーレートγrと目標ヨーレートγtの差が大きいほど大きな制動力を発生させる。これにより、この旋回制御手段1bは、車両10の旋回姿勢を安定方向へと制御する。
【0032】
ところで、車両総重量Mとは、車両10そのものの重量である車両重量M1と、車両10に搭乗している乗員や積載している荷物の合計である乗員及び荷物の総重量M2と、を加算したものであるので、その乗員及び荷物の総重量M2によって変化する変数である。また、乗員の着座位置や荷物の積載位置は、設計値としての車両10の重心位置(以下、「設計車両重心位置」という。)P0に対して車両10の前後左右方向に離れている。これが為、乗員の乗り降りや荷物の積み卸し等により車両総重量Mが変化した際には、車両重心位置Pが設計車両重心位置P0に対してずれる。従って、厳密には、線形2輪モデルにおける車両前後方向の設計車両重心位置P0に基づいて求めた前軸から重心までの距離Lfや後軸から重心までの距離Lrが上述した設計値通りにはならない。また、コーナリングパワーとは、厳密に観ると、図2に示す如く、前輪WFL,WFRであれば前軸に働く荷重(以下、「前軸重量」という。)Mf、後輪WRL,WRRであれば後軸に働く荷重(以下、「後軸重量」という。)Mrに応じて変化する値であり、荷重が大きいほど大きくなる。そして、その前軸重量Mfや後軸重量Mrは、車両総重量Mや車両重心位置Pの変化によって変化することが知られている。従って、前輪WFL,WFRと後輪WRL,WRRの夫々の等価コーナリングパワーCpf,Cprは、車両総重量Mや車両重心位置Pの変化に伴い変わるので、設計値通りにならない。また、ヨー慣性モーメントIzは、厳密に観ると、図3に示す如く、車両総重量Mに応じて変化する値であり、車両総重量Mが重いほど大きくなるので、設計値通りにならない。
【0033】
このことから、実際のスタビリティファクタKHやヨーレート応答遅れ係数TPは、車両総重量Mの設計値に対する変化とこの変化に伴う車両重心位置Pの変化に応じて値が変わるものと云える。つまり、従来用いていたスタビリティファクタKHやヨーレート応答遅れ係数TPは、実際の値に対して車両総重量Mや車両重心位置Pの変化分だけずれが生じている。これが為、目標ヨーレートγtについても、設計値通りの車両総重量Mと車両重心位置P(=P0)でなければ、その変化分だけ本来の値に対してずれている。この目標ヨーレートγtの実際の値とのずれは、実ヨーレートγrとの差に表れるので、そのずれ量が多いほど(つまり車両総重量Mと車両重心位置Pの変化が大きいほど)、旋回制御時の制御対象の車輪に対して発生させる制動力を本来必要とされる大きさから外していく。従って、車両10は、実際の車両総重量Mや車両重心位置Pが設計値からずれるほど、所望の旋回姿勢に制御されにくくなる。そこで、本実施例1の電子制御装置1には、車両総重量Mの変化とこの変化に伴う車両重心位置Pの変化を考慮したスタビリティファクタKHやヨーレート応答遅れ係数TPの設定を行う旋回特性指数設定手段1cを設けている。
【0034】
図4に、実情に沿った車両10の線形2輪モデルの簡易図を示す。
【0035】
本図において、「Lf1」は前軸から車両重量M1が荷重として働く作用点m1までの距離、「Lf2」は前軸から乗員及び荷物の総重量M2が荷重として働く作用点m2までの距離を表している。
【0036】
その作用点m1は、乗員も荷物も無い車両10そのものの重心位置(線形2輪モデルにおける設計値の重心位置)に相当する。従って、前軸から作用点m1までの距離Lf1は、設計値として用意しておくことができる。
【0037】
次に、作用点m2は、乗員の着座位置や荷物の積載位置によって決まる。ここで、その乗員の着座位置や荷物の積載位置は、如何様な車両10においても予め決められている。これが為、乗員や荷物が車両10のどの位置に荷重として働くのかを予め近似的に求めることができるので、作用点m2としては、その近似的に求めた位置を設定しておけばよい。つまり、前軸から作用点m2までの距離Lf2は、設計値として用意しておくことができる。この近似による考え方は、夫々の着座位置が設計車両重心位置P0の近くにあり、且つ、前後左右に広い荷室ではない車両10、例えばセダンタイプやクーペタイプの車両10において特に有用である。
【0038】
一方、乗車定員の多いバス等の車両10においては、乗車人数、乗員の着座位置や立ち位置に応じて作用点m2が大きく変わる。また、荷室が少なくとも前後又は左右に広いトラック等の車両10においては、荷物の量や積載位置に応じて作用点m2が大きく変わる。従って、これらの様な車両10では、作用点m2を一箇所に決めがたいので、その作用点m2が求められるように旋回特性指数設定手段1cを構成しておけばよい。例えば、旋回特性指数設定手段1cは、圧電素子等の様な加圧の有無を検知可能な加圧状態検知手段を利用し、その検出信号に基づいて作用点m2を演算することができる。バス等の車両10では、その加圧状態検知手段を各座席に配設すると共に床に略等間隔で複数個配設して、乗員の着座位置や立ち位置が把握できるようにすればよく、トラック等の車両10においては、その加圧状態検知手段を荷室の床に略等間隔で複数個配設して、荷物の積載位置が把握できるようにすればよい。この加圧状態検知手段は、座席と荷室の双方に配設し、更にバス等の乗員が立つことのある車両ならば立ち位置のある床にも配設して、作用点m2の演算精度が高まるようにしてもよい。また、旋回特性指数設定手段1cは、荷重を検出する荷重計等の荷重検出手段を利用することもできる。その荷重検出手段の配設場所は、加圧状態検知手段と同等にすればよい。その荷重検出手段は、乗員の着座位置や立ち位置、荷物の積載位置のみならず、乗員や荷物の重量についても把握できる。これが為、荷重検出手段は、座席と荷室の双方に配設し、更にバス等の乗員が立つことのある車両10ならば立ち位置のある床にも配設して、作用点m2の演算精度を高めると共に、乗員及び荷物の総重量M2も検出できるようにしてもよい。
【0039】
これに対して、そのバス等の車両10であっても、乗車人数や乗員の配置が略一定になる車両又はこれらが略一定になる走行条件の場合には、作用点m2が大幅に変動しない。また、トラック等の車両10であっても、乗車人数や乗員の配置、そして荷物の種類や積載位置が略一定になる車両10又はこれらが略一定になる走行条件の場合にも、作用点m2が大幅に変動しない。これが為、これらのような場合には、前軸から作用点m2までの距離Lf2を設計値として用意しておくことも可能である。特に各乗員が皆同一人であるときや各乗員の着座位置までもが一定であるときには、作用点m2が殆ど変動しないので、より精度の高い設計値としての距離Lf2の情報を得ることができる。従って、これらのような場合には、距離Lf2の情報を設計値として用意できるようにしておけばよい。
【0040】
図4の「LfZAN」は、車両総重量Mによる前軸から現状における車両重心位置Pまでの距離を表しており、線形2輪モデルにおける車両前後方向の重心位置(以下、「前後重心位置」という。)と云える。この前後重心位置LfZANについては、下記の式4を用いて電子制御装置1の重心位置演算手段1dが求める。
【0041】
【数4】
【0042】
この前後重心位置LfZANを演算する際には、車両重量M1、乗員及び荷物の総重量M2、前軸から作用点m1までの距離Lf1並びに前軸から作用点m2までの距離Lf2の情報が必要になる。その夫々の距離Lf1,Lf2については、上述した設定値や演算値を利用する。また、車両重量M1は、設計値を利用できるので、これを用いる。これらに対して、乗員及び荷物の総重量M2は、上述したように最低限必要となる個数の荷重検出手段が搭載されていればその検出値を利用すればよいが、その個数分搭載されていなければ別の方法で求める必要がある。本実施例1においては、電子制御装置1に重量演算手段1eを用意しており、これを利用する。
【0043】
その重量演算手段1eは、荷重検出手段が十分な個数搭載されている場合、各荷重検出手段の検出信号を利用して乗員及び荷物の総重量M2の演算を行うことができる。この場合、その乗員及び荷物の総重量M2と車両重量M1とを加算することによって車両総重量Mが求められる。また、そのような複数個の荷重検出手段に替えて、車両総重量Mの検出ができる重量検出手段を利用してもよい。この重量検出手段としては、例えばサスペンション等に配設して静的な状態での車両総重量Mを検出するものが知られている。
【0044】
一方、この重量演算手段1eは、荷重検出手段が十分に搭載されていない場合、この技術分野における周知の手法によって先ず車両総重量Mを推定する。この場合の重量演算手段1eは、エンジンの出力トルク又は車両駆動力、車両加速度又は車両減速度、車速等の情報を利用して車両総重量Mを推定することができる。例えば、この重量演算手段1eは、或る大きさのエンジンの出力トルク(又は車両駆動力)が発生している状態におけるアクセル開度(又はスロットル開度)に対する車両加速度又は車両減速度の大きさに応じて車両総重量Mの推定を行う。その際、車両総重量Mは、そのアクセル開度(又はスロットル開度)に対する車両加速度が小さいほど重くなり、アクセル開度(又はスロットル開度)に対する車両減速度が大きいほど重くなる。そして、重量演算手段1eは、その推定した車両総重量Mから設計値たる車両重量M1を減算して乗員及び荷物の総重量M2を推定する(M2=M−M1)。エンジンの出力トルクについては、エンジン回転数等に基づき演算したものを利用してもよく、電子制御装置1からエンジンへの指令値を利用してもよい。車両加速度又は車両減速度は、車両前後加速度センサの検出信号を利用して検出すればよい。車速は、車速センサや車輪速度センサの検出信号を利用して検出すればよい。
【0045】
車両総重量Mの変化(換言するならば乗員及び荷物の総重量M2の変化)と車両重心位置Pの変化を考慮したスタビリティファクタKHは、上記式2に基づく下記の式5を用いて演算する。
【0046】
【数5】
【0047】
この式5において、車両重量M1とホイールベースL以外のパラメータは、全て車両総重量Mと車両重心位置Pの変化に応じて変化する変数である。乗員及び荷物の総重量M2や前後重心位置LfZANの情報は、上述したようにして得ることができる。また、前輪WFL,WFRと後輪WRL,WRRの夫々の等価コーナリングパワーCpf,Cprについては、例えば図2に基づく荷重の2次式で近似することができるので、この近似式としての下記の式6,7で夫々求めることにする。
【0048】
【数6】
【0049】
【数7】
【0050】
これら式6,7における「af」、「ar」、「bf」、「br」、「cf」及び「cr」は、定数である。尚、「af≠0」、「ar≠0」である。また、これら式6,7における前軸重量Mfや後軸重量Mrは、下記の式8,9で夫々求めることができる。
【0051】
【数8】
【0052】
【数9】
【0053】
また、車両総重量Mの変化(乗員及び荷物の総重量M2の変化)と車両重心位置Pの変化を考慮したヨーレート応答遅れ係数TPは、上記式3を用いて演算する。この式3の中のヨー慣性モーメントIzは、前述したように車両総重量Mに応じて変化する。図3においては、車両総重量Mとヨー慣性モーメントIzが下記の式10の如き関係にあるものとして例示している。この式10の「k」は比例係数であり、「Io」はオフセットである。また、この式3の中の前輪WFL,WFRと後輪WRL,WRRの夫々の等価コーナリングパワーCpf,Cprは、車両重心位置Pの変化に伴い変わる。
【0054】
【数10】
【0055】
以下に、本実施例1の車両制御装置におけるスタビリティファクタKHと前後重心位置LfZANとヨーレート応答遅れ係数TPの設定動作について図5のフローチャートに基づき説明する。
【0056】
電子制御装置1の旋回特性指数設定手段1cは、イグニッションのオン信号を受信した際に(ステップST1)、スタビリティファクタKH、前後重心位置LfZAN及びヨーレート応答遅れ係数TPの初期化を行う(ステップST2,ST3,ST4)。このとき、旋回特性指数設定手段1cは、前回、つまり最後に記憶したスタビリティファクタKHと前後重心位置LfZANとヨーレート応答遅れ係数TPの情報を電子制御装置1の記憶手段から読み込み、これらを各々初期値として設定する。
【0057】
以後、設定停止条件が成立するまでは、これ以降の演算処理を繰り返す。尚、その設定停止条件とは、以下に示す旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)と前後重心位置LfZANの設定動作を停止させる際の条件のことである。例えば、旋回特性指数設定手段1cには、イグニッションがオフになった後、所定時間が経過したときに、車両10が一時的な停車ではなく駐車等の継続的な停車であると判断して、設定停止条件が成立したと判定させる。
【0058】
先ず、旋回特性指数設定手段1cは、現在の車両総重量Mの情報を取得すると共に、その情報についての信頼度(以下、「重量信頼度」という。)trmの情報も取得する(ステップST5)。
【0059】
その車両総重量Mについては、前述したようにして重量演算手段1eに推定又は検出させる。また、重量信頼度trmについては、例えば、乗員及び荷物の総重量M2の検出又は車両総重量Mの推定が車両加速度又は車両減速度の大きいときに行われたものであるほど高くする。重量演算手段1eは、最も信頼度が低ければ「0」、最も信頼度が高ければ「1」とし、0〜1の範囲内で重量信頼度trm(0≦trm≦1)を求めて設定する。この重量演算手段1eには、車両総重量Mの演算と重量信頼度trmの演算を常時又は所定時間毎に実行させ、例えば電子制御装置1の記憶手段に記憶させる。旋回特性指数設定手段1cは、その記憶手段から車両総重量Mと重量信頼度trmを読み込み、これらを現在の車両総重量Mと重量信頼度trmにする。
【0060】
続いて、旋回特性指数設定手段1cは、旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)と前後重心位置LfZANの設定が可能であるのか否かを判定する(ステップST6)。
【0061】
これらを求める際には、車両総重量M(=M1+M2)の情報が必要になる。従って、旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)と前後重心位置LfZANは、車両総重量Mについての重量信頼度trmが低いときに求めても、現状における正確な値を示していないので、今現在設定されているものと置き換えるべきでない。これが為、旋回特性指数設定手段1cには、取得した重量信頼度trmが高いときにこれらの設定が可能との判定を行わせる。ここでは、その重量信頼度trmと所定の閾値tr1(0<tr1<1)とを比較し、その重量信頼度trmが閾値tr1よりも大きければ、設定可能と判定する。その閾値tr1は、例えば、車両総重量Mの演算値と実測値とを重量信頼度trm毎に比較する実験を行い、その演算値と実測値の誤差が情報の信頼性の観点で許容し得ない上限のときの重量信頼度trmに設定する。
【0062】
旋回特性指数設定手段1cは、車両総重量Mについての重量信頼度trmが閾値tr1以下であり、旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)と前後重心位置LfZANの置き換えをすべきでないと判断(つまり設定不可能と判定)した場合、上記ステップST5に戻って、新たに車両総重量Mと重量信頼度trmの情報を取得する。
【0063】
一方、この旋回特性指数設定手段1cは、その重量信頼度trmが閾値tr1よりも大きく、旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)と前後重心位置LfZANの設定が可能であると判定した場合、取得した現在の車両総重量Mに基づいて上記式4から現在の車両の前後重心位置LfZANを重心位置演算手段1dに求めさせる(ステップST7)。
【0064】
このステップST7においては、先ず、設計値として用意されている車両重量M1と前軸から作用点m1までの距離Lf1以外のパラメータを求める。重心位置演算手段1dは、ステップST5で取得した車両総重量Mから車両重量M1を減算して、現在の乗員及び荷物の総重量M2を求める(M2=M−M1)。尚、上述したように、その乗員及び荷物の総重量M2を直接検出できるのならば、その検出結果を利用してもよい。また、この重心位置演算手段1dは、前軸から作用点m2までの距離Lf2を求める。この距離Lf2については、前述したように、設計値として近似的な値が用意可能ならばその用意された設定値を利用し、精度を高めるならば加圧状態検知手段や荷重検出手段の検出信号に基づき演算する。そして、このステップST7においては、これらの各種パラメータを上記式4に代入して現在の車両総重量Mに応じた前後重心位置LfZANを求める。
【0065】
次に、この旋回特性指数設定手段1cは、その前後重心位置LfZANの情報も利用して、現在の車両総重量Mと車両重心位置Pに応じたスタビリティファクタKHの演算を行う(ステップST8)。
【0066】
このステップST8においては、これまでの過程で得られていない前輪WFL,WFRと後輪WRL,WRRの夫々の等価コーナリングパワーCpf,Cprについて、上記式6〜9を用いて求める。これにより必要な各種パラメータが得られるので、旋回特性指数設定手段1cは、これらを上記式5に代入して現在の車両総重量Mに応じたスタビリティファクタKHを求める。
【0067】
また、この旋回特性指数設定手段1cは、現在の車両総重量Mと車両重心位置Pに応じたヨーレート応答遅れ係数TPを求める(ステップST9)。
【0068】
このステップST9においては、これまでの過程で得られていない現在の車両総重量Mに応じたヨー慣性モーメントIzを上記式10から求める。これにより必要な各種パラメータが得られるので、旋回特性指数設定手段1cは、これらを上記式3に代入して現在の車両総重量Mと車両重心位置Pに応じたヨーレート応答遅れ係数TPを求める。
【0069】
このようにして旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)と前後重心位置LfZANを求めた後、旋回特性指数設定手段1cは、その夫々の演算値を現在の車両総重量Mと車両重心位置Pに応じた旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)と前後重心位置LfZANとして設定する(ステップST10)。これらの設定値は、電子制御装置1の記憶手段に記憶させる。
【0070】
車両制御装置は、その車両総重量Mや車両重心位置Pの変化を考慮に入れて設定されたスタビリティファクタKHとヨーレート応答遅れ係数TPを用いて車両制御を実行する。つまり、旋回制御手段1bは、その現在の車両総重量Mと車両重心位置Pに応じた旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)や車両の走行状態を表す走行状態量(検出された車速V等)を上記式1に代入して目標ヨーレートγtを求め、実ヨーレートγrとの比較を行う。そして、この旋回制御手段1bは、その目標ヨーレートγtと実ヨーレートγrの差に応じた目標制御量(即ち制御対象の車輪の目標制動力)又は/及び目標制御タイミングの設定を行い、ブレーキアクチュエータ34をその目標制御タイミングで制御してその車輪に目標制動力を発生させる。その目標制御量や目標制御タイミングは、乗員の乗り降りや荷物の積み卸し等により変化した現在の車両総重量Mと車両重心位置Pが考慮されたものである。従って、車両制御装置は、現在の車両総重量Mと車両重心位置Pに応じた所望の旋回姿勢で車両10を旋回させることができる。
【0071】
ところで、上述した例示においては、ステップST7〜ST9で前後重心位置LfZANとスタビリティファクタKHとヨーレート応答遅れ係数TPの演算を行い、これらを現在の車両総重量Mと車両重心位置Pに応じた値として設定している。ここで、乗員の人数や着座位置、荷物の重さや積載位置を多様に変化させた際には、その変化の形態に合わせて車両総重量Mと車両重心位置Pも様々に変わる。これが為、乗員の人数等を様々に変化させた上記例示の設定動作やこれに類するシミュレーションを行うことによって、多様な乗員の人数等の条件(つまり多様な車両総重量Mと車両重心位置Pの条件)に応じた旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)と前後重心位置LfZANの値を得ることができる。そして、これらを集めることによって、図6〜8に示す前後重心位置LfZAN、スタビリティファクタKH及びヨーレート応答遅れ係数TPのマップデータを作ることができる。従って、上記ステップST7〜ST9においては、そのマップデータを利用して前後重心位置LfZAN、スタビリティファクタKH及びヨーレート応答遅れ係数TPの情報を導き出すようにしてもよい。そのマップデータは、例えば電子制御装置1の記憶手段に記憶させておく。
【0072】
その図6のマップデータは、車両総重量Mに応じた前後重心位置LfZANの情報を得る為のものである。この前後重心位置LfZANに対して、スタビリティファクタKHとヨーレート応答遅れ係数TPは、同じ車両総重量Mでも車両重心位置Pが異なれば違う値となる。これが為、図7,8のマップデータは、例えば、夫々に車両総重量Mに応じたスタビリティファクタKHとヨーレート応答遅れ係数TPの情報を得るべく構成するが、所定の車両重心位置P(具体的には前後重心位置LfZAN)毎に又はこの車両重心位置Pを含むその近傍で括った範囲毎に用意させる。
【0073】
これら図6〜8のマップデータは、上記ステップST7〜ST9の演算結果に従って値が更新されるものであってもよい。この場合、旋回特性指数設定手段1cには、旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)と前後重心位置LfZANの設定結果の学習機能を設けておく。尚、その前後重心位置LfZANの学習機能は、重心位置演算手段1dに設けてもよい。
【0074】
また、上述した例示においては、前後重心位置LfZAN、つまり現在の車両重心位置Pを上記式4から求めている。ここで、一般的な車両10であれば、セダンタイプ等であろうとトラック等であろうと、荷室は、設計車両重心位置P0よりも車両後方に位置している。これが為、車両重心位置Pは、積荷の量が増えるほど、換言するならば車両総重量Mの変化量が増量側に大きくなるほど設計車両重心位置P0に対して車両後方に移動する。そして、車両10の使用形態によっては、荷室内で略同じ場所に荷物を積載する場合もある。この場合には、車両総重量Mの変化量と車両重心位置Pの移動量の間に相関関係が生まれる。従って、そのような使用形態を採る車両10においては、車両総重量Mの変化量が増量側に大きくなるほど当該変化量分だけ車両重心位置Pが車両後方に移動したと推定し、その相関関係に基づいて現在の車両重心位置P(=前後重心位置LfZAN)の推定を行うよう重心位置演算手段1dを構成してもよい。そして、この車両10においては、現在の車両総重量Mの情報が得られれば、現在の車両重心位置Pを推定した後、上記式5や式3を用いてスタビリティファクタKHやヨーレート応答遅れ係数TPを求めることができ、上記式1から目標ヨーレートγtを求めることができる。これが為、この車両10においては、目標ヨーレートγtを求める際の演算処理の迅速化を図ることができる。また、この車両10においては、車両総重量Mに基づいて旋回特性指数値設定手段がスタビリティファクタKHやヨーレート応答遅れ係数TPを求めることになり、更に、その車両総重量Mに基づいて旋回制御手段1bが目標ヨーレートγtを求めることになる。
【0075】
[実施例2]
次に、本発明に係る車両制御装置の実施例2を図9から図13に基づいて説明する。
【0076】
本実施例2の車両制御装置は、前述した実施例1の車両制御装置と同様に、電子制御装置1の一機能として用意されており、旋回制御手段1b、重量演算手段1eや旋回特性指数設定手段1c等を備えている。また、この車両制御装置は、実施例1で例に挙げた車両10に適用されるものとして例示する。
【0077】
実施例1の旋回特性指数設定手段1cは、重量信頼度trmが高いときの車両総重量M及び車両重心位置Pの情報と前述した式5とを用いてスタビリティファクタKHを演算させ、その車両総重量M及び車両重心位置Pの情報と式3とを用いてヨーレート応答遅れ係数TPを演算させた。また、この実施例1の旋回特性指数設定手段1cは、その車両総重量M及び車両重心位置Pの情報とマップデータを利用してスタビリティファクタKHとヨーレート応答遅れ係数TPを求めさせた。
【0078】
これに対して、本実施例2の旋回特性指数設定手段1cは、その実施例1と同じようにしてスタビリティファクタKHとヨーレート応答遅れ係数TPの情報を得てもよいが、これらを推定させるように構成する。例えば、そのスタビリティファクタKHの推定やヨーレート応答遅れ係数TPの推定は、この技術分野における周知の手法を用いて実行させればよい。その推定手法は、その一例が特許文献(特開2004−26073号公報)に記載されており、これを利用すればよい。
【0079】
また、本実施例2の旋回特性指数設定手段1cは、推定されたスタビリティファクタ(以下、「推定スタビリティファクタ」という。)KHpの情報についての信頼度(以下、「推定スタビリティファクタ信頼度」という。)trkhと、推定されたヨーレート応答遅れ係数(以下、「推定ヨーレート応答遅れ係数」という。)TPpの情報についての信頼度(以下、「推定ヨーレート応答遅れ係数信頼度」という。)trtpと、を求めさせるようにも構成する。その推定スタビリティファクタ信頼度trkhについては、推定スタビリティファクタKHpの推定が車両横加速度Gyの大きいときに行われたものであるほど高くする。同様に、推定ヨーレート応答遅れ係数信頼度trtpについては、その推定ヨーレート応答遅れ係数TPpの推定が車両横加速度Gyの大きいときに行われたものであるほど高くする。旋回特性指数設定手段1cは、最も信頼度が低ければ「0」、最も信頼度が高ければ「1」とし、0〜1の範囲内で推定スタビリティファクタ信頼度trkh(0≦trkh≦1)と推定ヨーレート応答遅れ係数信頼度trtp(0≦trtp≦1)を各々求めて設定する。
【0080】
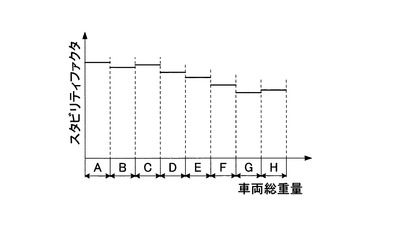
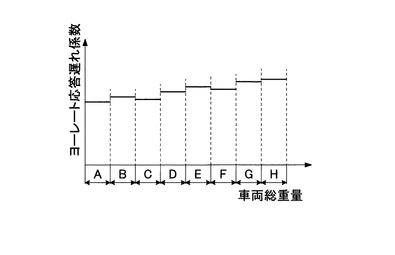
また、本実施例2の旋回特性指数設定手段1cは、重量信頼度trm、推定スタビリティファクタ信頼度trkh及び推定ヨーレート応答遅れ係数信頼度trtpが夫々に高ければ、旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)を夫々の推定値に基づいて更新(つまり学習)させる。例えば、本実施例2の電子制御装置1の記憶手段には、スタビリティファクタKHとヨーレート応答遅れ係数TPのマップデータが各々用意されている。スタビリティファクタKHのマップデータは、例えば、図9に示す如く、車両総重量Mに応じたスタビリティファクタKHの情報を得るべく構成したものであり、所定の車両重心位置P(前後重心位置LfZAN)毎に又はこの車両重心位置Pを含むその近傍で括った範囲毎に用意する。この図9のマップデータには、所定の重量で区切られた車両総重量Mの範囲(A〜H)毎のスタビリティファクタKHが登録されている。同様に、ヨーレート応答遅れ係数TPのマップデータは、例えば、図10に示す如く、車両総重量Mに応じたヨーレート応答遅れ係数TPの情報を得るべく構成したものであり、所定の車両重心位置P(前後重心位置LfZAN)毎に又はこの車両重心位置Pを含むその近傍で括った範囲毎に用意する。この図10のマップデータには、所定の重量で区切られた車両総重量Mの範囲(A〜H)毎のヨーレート応答遅れ係数TPが登録されている。本実施例2の旋回特性指数設定手段1cは、夫々のマップデータを推定スタビリティファクタKHpと推定ヨーレート応答遅れ係数TPpに基づき更新する。
【0081】
以下に、本実施例2の車両制御装置におけるスタビリティファクタKHとヨーレート応答遅れ係数TPの学習動作について図11のフローチャートに基づき説明する。
【0082】
本実施例2においても、旋回特性指数設定手段1cは、イグニッションのオン信号を受信した際に(ステップST11)、スタビリティファクタKHとヨーレート応答遅れ係数TPの初期化を行う(ステップST12,ST13)。このステップST12,ST13においては、例えば、前回、つまり最後に旋回制御手段1bが目標ヨーレートγtの演算時に設定したスタビリティファクタKHとヨーレート応答遅れ係数TPの情報を電子制御装置1の記憶手段から読み込み、これらを各々初期値として設定する。
【0083】
以後、学習停止条件が成立するまでは、これ以降の演算処理を繰り返す。尚、その学習停止条件とは、以下に示す旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)の学習動作を停止させる際の条件のことである。例えば、旋回特性指数設定手段1cには、イグニッションがオフになった後、所定時間t1が経過したときに、車両10が一時的な停車ではなく駐車等の継続的な停車であると判断して、学習停止条件が成立したと判定させる。その所定時間t1は、後述するステップST25で用いる所定時間t2よりも長い時間を設定する(t1>t2)。
【0084】
先ず、旋回特性指数設定手段1cは、実施例1と同様に、現在の車両総重量Mの情報と重量信頼度trmの情報を取得する(ステップST14)。
【0085】
また、この旋回特性指数設定手段1cは、スタビリティファクタKHの推定を行い(ステップST15)、この推定スタビリティファクタKHpの情報について推定スタビリティファクタ信頼度trkhの情報を求める(ステップST16)。
【0086】
また、この旋回特性指数設定手段1cは、ヨーレート応答遅れ係数TPの推定を行い(ステップST17)、この推定ヨーレート応答遅れ係数TPpの情報について推定ヨーレート応答遅れ係数信頼度trtpの情報を求める(ステップST18)。
【0087】
旋回特性指数設定手段1cは、現在の車両総重量M、推定スタビリティファクタKHp及び推定ヨーレート応答遅れ係数TPpの情報、そして、これらの信頼度(重量信頼度trm、推定スタビリティファクタ信頼度trkh及び推定ヨーレート応答遅れ係数信頼度trtp)の情報を得た後、その重量信頼度trmについての判定を行う(ステップST19)。
【0088】
実施例1でも説明したように、重量信頼度trmが低いときの旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)は、現状における正確な値を示していないので、今現在設定されているものと置き換えるべきでない。これが為、このステップST19において重量信頼度trmが低いと判定された場合には、推定スタビリティファクタKHpや推定ヨーレート応答遅れ係数TPpが学習結果として更新されないよう上記ステップST14に戻り、新たな車両総重量Mの情報と重量信頼度trmの情報を取得する。このステップST19においては、重量信頼度trmと所定の閾値tr2(0<tr2<1)とを比較して、重量信頼度trmが閾値tr2よりも大きければ、その重量信頼度trmが高いと判定し、重量信頼度trmが閾値tr2以下ならば、その重量信頼度trmが低いと判定する。その閾値tr2は、実施例1の閾値tr1と同じようにして設定すればよい。
【0089】
このステップST19において重量信頼度trmが高いと判定された場合、旋回特性指数設定手段1cは、推定ヨーレート応答遅れ係数信頼度trtpについての判定を行う(ステップST20)。
【0090】
例えば、ここでは、推定ヨーレート応答遅れ係数信頼度trtpと所定の閾値tr3(0<tr3<1)とを比較して、推定ヨーレート応答遅れ係数信頼度trtpが閾値tr3よりも大きければ、その推定ヨーレート応答遅れ係数信頼度trtpが高いと判定し、推定ヨーレート応答遅れ係数信頼度trtpが閾値tr3以下ならば、その推定ヨーレート応答遅れ係数信頼度trtpが低いと判定する。その閾値tr3は、推定ヨーレート応答遅れ係数TPpと例えば前述した式3の演算式で求めたヨーレート応答遅れ係数TPとを推定ヨーレート応答遅れ係数信頼度trtp毎に比較する実験を行い、これらの誤差が情報の信頼性の観点で許容し得ない上限のときの推定ヨーレート応答遅れ係数信頼度trtpに設定する。
【0091】
旋回特性指数設定手段1cは、このステップST20で推定ヨーレート応答遅れ係数信頼度trtpが低いと判定した場合、電子制御装置1の記憶手段に記憶してある既存の学習結果を利用し、ヨーレート応答遅れ係数TPを現在の車両総重量Mと車両重心位置Pに基づき再度初期化する(ステップST21)。従って、この旋回特性指数設定手段1cは、車両総重量M等の情報を得た後、上記式4で前後重心位置LfZANの演算を重心位置演算手段1dに実行させ、現在の車両重心位置Pを明らかにしておく。
【0092】
その学習結果とは、前述した図10に示すマップデータのことである。従って、このステップST21においては、現在の車両総重量Mと車両重心位置Pをそのマップデータに照らし合わせ、その車両総重量Mと車両重心位置Pに該当するものとして読み込んだヨーレート応答遅れ係数TPを再び初期値として設定する。ここでの初期値は、上記ステップST13の初期値と比すれば、現在の車両総重量Mと車両重心位置Pが考慮されているので、現状に沿った値と云える。
【0093】
この旋回特性指数設定手段1cは、このステップST21でヨーレート応答遅れ係数TPを設定した後、上記ステップST17に戻り、再びヨーレート応答遅れ係数TPの推定を行う。この場合には、ステップST19に進んだときに重量信頼度trmが高いと判定されることが判っているので、このステップST19の判定を省いてステップST20に進めてもよい。また、ここでは、重量信頼度trmが高いときの車両総重量Mの情報は常に高精度であるとしているので上記ステップST17に戻すが、車両総重量Mや車両重心位置Pとヨーレート応答遅れ係数TPの関係をより精度良く求めるのならば、上記ステップST14に戻して車両総重量M等の情報取得を行わせるようにしてもよい。
【0094】
旋回特性指数設定手段1cは、上記ステップST20で推定ヨーレート応答遅れ係数信頼度trtpが高いと判定した場合、推定スタビリティファクタ信頼度trkhについての判定を行う(ステップST22)。
【0095】
例えば、ここでは、推定スタビリティファクタ信頼度trkhと所定の閾値tr4(0<tr4<1)とを比較して、推定スタビリティファクタ信頼度trkhが閾値tr4よりも大きければ、その推定スタビリティファクタ信頼度trkhが高いと判定し、推定スタビリティファクタ信頼度trkhが閾値tr4以下ならば、その推定スタビリティファクタ信頼度trkhが低いと判定する。その閾値tr4は、推定スタビリティファクタKHpと例えば前述した式5の演算式で求めたスタビリティファクタKHとを推定スタビリティファクタ信頼度trkh毎に比較する実験を行い、これらの誤差が情報の信頼性の観点で許容し得ない上限のときの推定スタビリティファクタ信頼度trkhに設定する。
【0096】
旋回特性指数設定手段1cは、このステップST22で推定スタビリティファクタ信頼度trkhが低いと判定した場合、電子制御装置1の記憶手段に記憶してある既存の学習結果を利用し、スタビリティファクタKHを現在の車両総重量Mと車両重心位置Pに基づき再度初期化する(ステップST23)。
【0097】
その学習結果とは、前述した図9に示すマップデータのことである。従って、このステップST23においては、現在の車両総重量Mと車両重心位置Pをそのマップデータに照らし合わせ、その車両総重量Mと車両重心位置Pに該当するものとして読み込んだスタビリティファクタKHを再び初期値として設定する。ここでの初期値は、上記ステップST12の初期値と比すれば、現在の車両総重量Mと車両重心位置Pが考慮されているので、現状に沿った値と云える。
【0098】
この旋回特性指数設定手段1cは、このステップST23でスタビリティファクタKHを設定した後、上記ステップST15に戻り、再びスタビリティファクタKHの推定を行う。この場合には、重量信頼度trmと推定ヨーレート応答遅れ係数信頼度trtpが高いと判定されることが判っているので、ステップST17〜ST20を省いてステップST22に進めてもよい。また、ここでは、重量信頼度trmが高いときの車両総重量Mの情報は常に高精度であるとしているので上記ステップST15に戻すが、車両総重量Mや車両重心位置PとスタビリティファクタKHの関係をより精度良く求めるのならば、上記ステップST14に戻して車両総重量M等の情報取得を行わせるようにしてもよい。
【0099】
旋回特性指数設定手段1cは、上記ステップST22で推定スタビリティファクタ信頼度trkhが高いと判定した場合、つまり重量信頼度trm、推定スタビリティファクタ信頼度trkh及び推定ヨーレート応答遅れ係数信頼度trtpの全てが高いと判定した場合、旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)の学習が可能であるのか否かの判定を行う。ここでは、先ず、車両10が停止しているのか否かの判定を行う(ステップST24)。そして、旋回特性指数設定手段1cは、車両10が停止していれば、車両停止時間tsが所定時間t2を超えたか否かの判定を行う(ステップST25)。
【0100】
このステップST24,ST25の判定は、図9及び図10のマップデータの更新が可能であるのか否かの判定のことである。例えば、走行中のときには、乗員の乗り降りや荷物の積み卸しが行われないので、車両総重量Mや車両重心位置Pに変化が生じない。これに対して、車両10が停止した際には、乗員の乗り降りや荷物の積み卸しが行われて、車両総重量Mや車両重心位置Pに変化が生じることがある。これが為、車両停止時間tsが所定時間t2よりも長く続いたときには、改めて新たな車両総重量M等とスタビリティファクタKHやヨーレート応答遅れ係数TPとの対応関係を求めることにして、推定スタビリティファクタKHp及び推定ヨーレート応答遅れ係数TPpに基づいた図9及び図10のマップデータの更新を行うことにする。その所定時間t2は、例えば乗員の乗り降りや荷物の積み卸しに要する平均的な時間よりも短い時間に設定する。従って、上記ステップST24で走行中との判定が為された場合又は上記ステップST25で車両停止時間tsが所定時間t2を超えていない(ts≦t2)との判定が為された場合、旋回特性指数設定手段1cには、学習不可能と判定させる。一方、上記ステップST25で車両停止時間tsが所定時間t2を超えた場合、旋回特性指数設定手段1cには、学習可能と判定させる。
【0101】
ここでは、上記ステップST24で走行中との判定が為されたならば、上記ステップST14に戻って、車両総重量Mと車両重心位置Pに応じた推定スタビリティファクタKHpや推定ヨーレート応答遅れ係数TPpの演算を新たに行う。また、上記ステップST25で車両停止時間tsが所定時間t2を超えていないと判定されたならば、上記ステップST24に戻る。これらに対して、上記ステップST25で車両停止時間tsが所定時間t2を超えて学習可能と判定された場合、旋回特性指数設定手段1cは、現在の車両総重量M、現在の車両重心位置P、推定スタビリティファクタKHp及び推定ヨーレート応答遅れ係数TPpに基づいて、学習結果たる図9及び図10のマップデータを夫々更新する(ステップST26)。
【0102】
例えば、このステップST26においては、現在の車両総重量M及び車両重心位置Pに該当する図9のマップデータ内の既存のスタビリティファクタKHの学習値と推定スタビリティファクタKHpとに基づき平均値を求め、この平均値を新たなスタビリティファクタKHの学習値としてマップデータの更新を行う(図12)。ここで、更新前のスタビリティファクタKHの学習値は、過去に行われた学習の結果を表している。これが為、平均値を求める際には、更新前のスタビリティファクタKHの学習値に過去の更新回数Nを乗算し、これに推定スタビリティファクタKHpを加算して全ての更新回数N+1で平均を取ることが望ましい。また、重量信頼度trmや推定スタビリティファクタ信頼度trkhが高いほど、学習値が推定スタビリティファクタKHpに近づくよう重み付けしてもよい。
【0103】
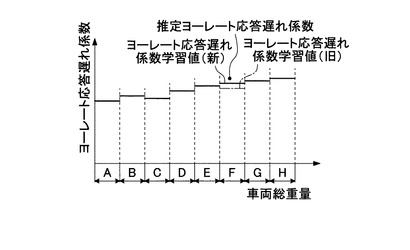
また、このステップST26においては、現在の車両総重量M及び車両重心位置Pに該当する図10のマップデータ内の既存のヨーレート応答遅れ係数TPの学習値と推定ヨーレート応答遅れ係数TPpとに基づき平均値を求め、この平均値を新たなヨーレート応答遅れ係数TPの学習値としてマップデータの更新を行う(図13)。更新前のヨーレート応答遅れ係数TPの学習値についても過去に行われた学習の結果を表している。これが為、平均値を求める際には、更新前のヨーレート応答遅れ係数TPの学習値に過去の更新回数Nを乗算し、これに推定ヨーレート応答遅れ係数TPpを加算して全ての更新回数N+1で平均を取ることが望ましい。また、重量信頼度trmや推定ヨーレート応答遅れ係数信頼度trtpが高いほど、学習値が推定ヨーレート応答遅れ係数TPpに近づくよう重み付けしてもよい。
【0104】
ここで、本実施例2においては、車両10が停止中なのか走行中なのかを観察し、停車中ならば車両停止時間tsに応じて学習の要否を判断している。これに替えて、ステップST24においてイグニッションオフであるのか否かを判定させ、イグニッションオフならば、その状態がどれだけの時間続いているのか否かをステップST25において判定させてもよい。この場合には、イグニッションオフの状態が所定時間続いているときに、学習可能と判定させる。
【0105】
車両制御装置は、その車両総重量Mや車両重心位置Pの変化を考慮に入れて更新された学習結果を用いて実施例1と同様の車両制御を実行する。従って、この車両制御装置は、現在の車両総重量Mと車両重心位置Pに応じた所望の旋回姿勢で車両10を旋回させることができる。
【0106】
ところで、本実施例2の旋回特性指数設定手段1cは、上記ステップST26の学習動作を終えた後で、車両総重量Mの範囲毎で且つ所定の車両重心位置P毎又はこの車両重心位置Pを含むその近傍で括った範囲毎に、スタビリティファクタKHとヨーレート応答遅れ係数TPの標準偏差を各々演算させるよう構成してもよい。その夫々の標準偏差は、学習に使われた複数の推定スタビリティファクタKHpや推定ヨーレート応答遅れ係数TPpの情報のばらつき度合いを示すものである。そして、標準偏差が大きいときには、学習結果内のスタビリティファクタKHやヨーレート応答遅れ係数TPの精度が明白でなく、正確な値を示していない可能性もあるので、この精度の点で疑義のあるスタビリティファクタKHやヨーレート応答遅れ係数TPの情報を採用しない方が好ましい。これが為、かかる標準偏差の演算機能を有する場合、旋回特性指数設定手段1cは、ヨーレート応答遅れ係数TPの標準偏差が所定値(例えば学習結果内のヨーレート応答遅れ係数TPの精度が高いと云えない値の下限値)よりも小さいときに上記ステップST21の再初期化を行わせ、その標準偏差が所定値以上に大きければ上記ステップST21の再初期化を行わせないように構成すればよい。また、この旋回特性指数設定手段1cは、スタビリティファクタKHの標準偏差が所定値(例えば学習結果内のスタビリティファクタKHの精度が高いと云えない値の下限値)よりも小さいときに上記ステップST23の再初期化を行わせ、その標準偏差が所定値以上に大きければ上記ステップST23の再初期化を行わせないように構成すればよい。
【0107】
また、車両10によっては、その使用形態に或る程度の規則性を有している場合がある。例えば、略同じ時間帯に同一ルートで自宅から勤務地まで走行する場合、決められた運転者が種類や数量の同じ荷物を或場所から目的地まで運搬する場合等が該当する。そして、このような場合には、走行中の車両総重量Mや車両重心位置Pにも規則性があり、スタビリティファクタKHやヨーレート応答遅れ係数TPの推定精度が高くなり、高精度の学習結果を得ることができる。そこで、上述した夫々の標準偏差については、少なくとも出発地、目的地又は日時の内の何れか1つが同じときの推定スタビリティファクタKHp及び推定ヨーレート応答遅れ係数TPpに基づいて求めさせることが望ましく、高精度なものとなる。その出発地や目的地の情報については、カーナビゲーションシステムの地図情報及び自車位置情報等を利用して得ることができる。日時については、車両10やカーナビゲーションシステムの有する日時情報を利用すればよい。そして、旋回特性指数設定手段1cは、その少なくとも出発地、目的地又は日時の内の何れか1つの情報に基づいたヨーレート応答遅れ係数TPの標準偏差が上記の所定値よりも小さいときに上記ステップST21の再初期化を行わせ、その標準偏差が所定値以上に大きければ上記ステップST21の再初期化を行わせないように構成すればよい。また、この旋回特性指数設定手段1cは、その少なくとも出発地、目的地又は日時の内の何れか1つの情報に基づいたスタビリティファクタKHの標準偏差が上記の所定値よりも小さいときに上記ステップST23の再初期化を行わせ、その標準偏差が所定値以上に大きければ上記ステップST23の再初期化を行わせないように構成すればよい。
【0108】
このように、推定ヨーレート応答遅れ係数信頼度trtpや標準偏差を利用してスタビリティファクタKHやヨーレート応答遅れ係数TPの推定精度の判断を行えるが、ヨーレート応答遅れ係数TPの推定精度については、ヨー慣性モーメントIzの比較によっても判断することができる。例えば、車両総重量Mに基づいて上記式10からヨー慣性モーメントIz1を求める。また、推定ヨーレート応答遅れ係数TPpに基づいて上記式3の変形式(下記の式11)からヨー慣性モーメントIz2を求める。ここで、上記ステップST19の判定により車両総重量Mの情報が信頼性の高いものであることが判ったとすると、その車両総重量Mの情報を利用したヨー慣性モーメントIz1の信頼性も高いと云える。これが為、そのヨー慣性モーメントIz1とヨー慣性モーメントIz2を比較して、これらの差が所定値(例えば≒0)よりも小さければ、そのヨー慣性モーメントIz2が信頼の置ける値であるとの判断が可能になり、このヨー慣性モーメントIz2の演算に用いた推定ヨーレート応答遅れ係数TPpが推定精度の高いものであると判断できる。
【0109】
【数11】
【0110】
ここで、前述した各実施例1,2においては車両挙動制御として旋回制御を挙げたが、その車両挙動制御は、必ずしもこれのみに限定するものではない。例えば、車両総重量Mや車両重心位置Pの変化は、前述したように前軸重量Mfや後軸重量Mrを変化させる。発進時や加速時の駆動輪の空転を抑えるトラクション制御においては、その目標制御量(動力源の目標出力や駆動輪の目標制動力)や目標制御タイミングを決める際に、その前軸重量Mfや後軸重量Mrの変化を考慮する必要がある。例えば、前輪駆動車において前軸重量Mfが設計値等の基準状態に対して減少した場合には、その基準状態のときよりも駆動輪の目標制動力を大きくしなければ、その駆動輪の空転を適切に抑え込めない可能性がある。これが為、この場合には、トラクション制御手段が前軸重量Mfの減少分に応じて駆動輪の目標制動力を大きくする必要がある。そして、その前軸重量Mfの減少分とは、車両総重量Mや車両重心位置Pの変化量に依存する。従って、本発明に係る車両挙動制御にはそのトラクション制御も含まれ、そのトラクション制御手段は、本発明に係る車両制御手段となる。
【0111】
また、前述した各実施例1,2においては車両総重量Mの変化と当該車両総重量Mの変化に伴う車両重心位置Pの変化に応じて目標制御値を変更するよう構成したが、その目標制御値は、車両総重量Mの変化に応じて変更させるよう構成してもよい。これは、例えば荷物の積載位置が大凡決められている車両で車両総重量Mが変化すると、その車両総重量Mの変化量を把握することで車両重心位置Pの変化を推定できるからであり、車両総重量Mの変化さえ知ることができれば適切な目標制御値の設定が可能だからである。また、これによれば、例えば車両重心位置Pに対して荷物の積載位置が車両後方にあるトラック等の車両においては、車両総重量Mが重くなるほど車両重心位置Pが車両後方に移ると判断することができる。従って、目標制御値については、その判断の結果としての車両重心位置Pに応じて変更させるよう構成してもよい。
【産業上の利用可能性】
【0112】
以上のように、本発明に係る車両制御装置は、車両総重量や車両重心位置の変化に対応させた適切な車両挙動制御を実行させる技術として有用である。
【符号の説明】
【0113】
1 電子制御装置(ECU)
1a 制動制御手段
1b 旋回制御手段(車両制御手段)
1c 旋回特性指数設定手段
1d 重心位置演算手段
1e 重量演算手段
10 車両
20 転舵装置
30 制動装置
41 ヨーレートセンサ
42 車速センサ
43FL,43FR,43RL,43RR 車輪速度センサ
44 転舵角センサ
45 車両横加速度センサ
P 車両重心位置
WFL,WFR,WRL,WRR 車輪
【技術分野】
【0001】
本発明は、車両の旋回時等の走行安定性を図る車両制御装置に関する。
【背景技術】
【0002】
従来、旋回時の車両の挙動を安定させる技術が知られている。例えば、下記の特許文献1には、車速や操舵輪の転舵角に応じて目標旋回制御量(目標ヨーレート)を求め、この目標旋回制御量(目標ヨーレート)と実際の旋回制御量(実際のヨーレート)との差に応じた目標制御量を設定して旋回制御を行う技術について開示されている。更に、この特許文献1には、旋回特性を表すスタビリティファクタに基づき目標旋回制御量(目標ヨーレート)の演算を行うことが開示されており、そのスタビリティファクタが車速等に応じて変更される点も記載されている。
【0003】
尚、下記の特許文献2には、車速や車両の重量に基づいて操舵アシスト制御時の操舵力を求める技術が開示されている。また、下記の特許文献3には、重量負荷変数に基づいて重心位置変数(重心位置)を推定し、車両のヨーレートを調整する運転者支援システムの制御に重心位置変数が利用される技術について開示されている。また、下記の特許文献4には、車両の重量や重心位置に応じて車両横加速度の閾値を調整し、この閾値を用いて車体のロール制御を行う技術について開示されている。また、下記の特許文献5,6には、車体総重量や車両の重心位置に応じて横すべり角を推定する技術が開示されている。また、下記の特許文献7には、車両上下方向の重心位置の変化に基づいてトラクション制御時の車両の運動状態を推定する技術について開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−95085号公報
【特許文献2】特開平11−78952号公報
【特許文献3】特表2008−520981号公報
【特許文献4】特開2006−168441号公報
【特許文献5】特開平11−321602号公報
【特許文献6】特開平11−321603号公報
【特許文献7】特開平4−237637号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、車両は、乗員の乗り降りや荷物の積み卸しによって車両総重量(車両そのものの重量+乗員等の重量)が変化する。そして、この車両総重量の変化は、車両重心位置にも変化を生じさせ、旋回特性に影響を与える。これが為、旋回特性を表すスタビリティファクタ等の旋回特性指数値は、厳密に云えば、その車両総重量、そして、車両重心位置の変化によって異なる値を示す。従って、その車両総重量や車両重心位置が設計値や設定値に対して変わると、目標旋回制御量(目標ヨーレート)が旋回制御の為に本当に必要とされる値にならないので、その車両総重量や車両重心位置の変化が十分に考慮されていない従来は、目標制御量や目標制御タイミング等の目標制御値のずれにより適切な旋回制御を行えない可能性があった。
【0006】
そこで、本発明は、かかる従来例の有する不都合を改善し、車両総重量や車両重心位置の変化に対応させた適切な車両挙動制御を行い得る車両制御装置を提供することを、その目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成する為、請求項1記載の発明では、設定した目標制御量又は/及び目標制御タイミングで車両の挙動制御を行う車両制御装置において、車両総重量の変化に応じて前記目標制御量又は/及び前記目標制御タイミングを変更する車両制御手段を設けている。
【0008】
また、上記目的を達成する為、請求項2記載の発明では、設定した目標制御量又は/及び目標制御タイミングで車両の挙動制御を行う車両制御装置において、車両総重量が重くなるほど車両重心位置が車両後方に移ると判断し、その車両重心位置に応じて前記目標制御量又は/及び前記目標制御タイミングを変更する車両制御手段を設けている。
【0009】
また、上記目的を達成する為、請求項3記載の発明では、設定した目標制御量又は/及び目標制御タイミングで車両の挙動制御を行う車両制御装置において、車両総重量の変化と当該車両総重量の変化に伴う車両重心位置の変化に応じて前記目標制御量又は/及び前記目標制御タイミングを変更する車両制御手段を設けている。
【0010】
例えば、請求項4記載の発明の如く、この請求項3記載の車両制御装置において、車両総重量を推定又は検出する重量演算手段と、車両重心位置を推定又は検出する重心位置演算手段と、車両の旋回特性を表す旋回特性指数値を車両総重量と車両重心位置に応じて設定する旋回特性指数設定手段と、を設ける。そして、車両制御手段については、車両の走行状態を表す走行状態量と車両総重量及び車両重心位置に応じた旋回特性指数値とに基づいて車両が所望の旋回姿勢となる目標制御量を設定するように構成することが望ましい。これにより、車両総重量や車両重心位置の変化に応じた目標制御量が設定されることになるので、車両は、この目標制御量で制御することによって、車両総重量や車両重心位置の変化、そして、これに伴う等価コーナリングパワー及びヨー慣性モーメントの変化が考慮された適切な旋回姿勢で旋回させることができる。
【0011】
また、その車両制御手段は、請求項5記載の発明の如く、車両の走行状態を表す走行状態量並びに車両総重量及び車両重心位置に応じた旋回特性指数値に基づいて所望の旋回姿勢となる目標旋回状態量を求め、この目標旋回状態量と実際の旋回状態量との差に応じて目標制御量を設定するように構成することが望ましい。
【0012】
また、重心位置演算手段は、請求項6記載の発明の如く、車両総重量の変化量が増量側に大きくなるほど当該変化量分だけ車両重心位置が車両後方に移動したと推定するように構成することが望ましい。例えば、乗員や荷物の積載位置が殆ど変化しない使用形態の車両においては、その荷物の量に応じて車両総重量や車両重心位置が変化する。そして、一般的な車両においては、荷室が例えば設計値としての基準となる車両重心位置よりも車両後方に存在している。これが為、かかる車両においては、車両総重量が増えるほどその増量分だけ車両重心位置が車両後方に移動することが判っているので、車両総重量の変化に基づいて車両重心位置を推定させることで演算処理の迅速化を図ることができる。
【発明の効果】
【0013】
車両総重量や車両重心位置の変化は、等価コーナリングパワー及びヨー慣性モーメントを変化させるので、旋回時の旋回姿勢に影響を与える。これが為、本発明に係る車両制御装置は、車両総重量や車両重心位置の変化に応じて旋回制御時の目標制御量又は/及び目標制御タイミングを変更することによって、車両を安定した旋回姿勢で、つまり安定した挙動で旋回させることができる。また、その車両総重量や車両重心位置の変化は、前軸や後軸の荷重を変化させ、これにより駆動輪の荷重を減少させたならば、トラクション制御の際に駆動輪の空転を適切に抑えにくくなる。これが為、本発明に係る車両制御装置は、車両総重量や車両重心位置の変化に応じてトラクション制御時の目標制御量又は/及び目標制御タイミング(駆動輪の目標制動力等)を変更することによって、駆動輪の空転を抑え、車両を安定した挙動で発進や加速させることができる。
【図面の簡単な説明】
【0014】
【図1】図1は、本発明に係る車両制御装置と適用対象の車両の一例を示す図である。
【図2】図2は、荷重とコーナリングパワーの関係について説明する図である。
【図3】図3は、車両総重量とヨー慣性モーメントの関係について説明する図である。
【図4】図4は、車両の線形2輪モデルの簡易図である。
【図5】図5は、実施例1の設定動作について説明するフローチャートである。
【図6】図6は、実施例1における前後重心位置のマップデータの一例を示す図である。
【図7】図7は、実施例1におけるスタビリティファクタのマップデータの一例を示す図である。
【図8】図8は、実施例1におけるヨーレート応答遅れ係数のマップデータの一例を示す図である。
【図9】図9は、実施例2におけるスタビリティファクタのマップデータの一例を示す図である。
【図10】図10は、実施例2におけるヨーレート応答遅れ係数のマップデータの一例を示す図である。
【図11】図11は、実施例2の学習動作について説明するフローチャートである。
【図12】図12は、実施例2における更新されたスタビリティファクタのマップデータの一例を示す図である。
【図13】図13は、実施例2における更新されたヨーレート応答遅れ係数のマップデータの一例を示す図である。
【発明を実施するための形態】
【0015】
以下に、本発明に係る車両制御装置の実施例を図面に基づいて詳細に説明する。尚、この実施例によりこの発明が限定されるものではない。
【実施例】
【0016】
[実施例1]
本発明に係る車両制御装置の実施例1を図1から図8に基づいて説明する。
【0017】
本実施例1の車両制御装置は、図1に示す電子制御装置(ECU)1の一機能として用意されたものとする。その電子制御装置1は、図示しないCPU(中央演算処理装置)、所定の制御プログラム等を予め記憶しているROM(Read Only Memory)、そのCPUの演算結果を一時記憶するRAM(Random Access Memory)、予め用意された情報等を記憶するバックアップRAM等によって構成されている。
【0018】
この車両制御装置が適用される車両10は、図示しないエンジンやモータ等の動力源からの出力(出力トルク)を変速機等の動力伝達装置を介して駆動輪(例えば後輪WRL,WRR)に車輪駆動力として伝えるものであり、FR(フロントエンジン・リアドライブ)車、FF(フロントエンジン・フロントドライブ)車、四輪駆動車の別を問わず、また、ミッドシップエンジンやリヤエンジンの車両、その動力源としてエンジンとモータの双方を備えた所謂ハイブリッド車両でもよい。
【0019】
この車両には、前輪WFL,WFRを操舵輪として転舵させる転舵装置20が設けられている。この転舵装置20は、運転者による操舵操作子たるステアリングホイール21と、このステアリングホイール21の操舵操作に伴い駆動する転舵角付与手段22と、を備えている。例えば、その転舵角付与手段22は、図示しないラックギヤやピニオンギヤを備えた所謂ラック&ピニオン機構によるものである。
【0020】
また、この車両10には、車体を減速又は停止させる制動装置30が設けられている。この制動装置30は、運転者が操作するブレーキペダル31と、このブレーキペダル31に入力された運転者のブレーキ操作に伴う操作圧力(ペダル踏力)を所定の倍力比で倍化させる制動倍力手段(ブレーキブースタ)32と、この制動倍力手段32により倍化されたペダル踏力をブレーキペダル31の操作量に応じたブレーキ液圧(以下、「マスタシリンダ圧」という。)へと変換するマスタシリンダ33と、そのマスタシリンダ圧をそのまま又は車輪毎に調圧するブレーキ液圧調整手段(以下、「ブレーキアクチュエータ」という。)34と、このブレーキアクチュエータ34を経たブレーキ液圧が伝えられる各車輪WFL,WFR,WRL,WRRのブレーキ液圧配管35FL,35FR,35RL,35RRと、この各ブレーキ液圧配管35FL,35FR,35RL,35RRのブレーキ液圧が各々供給されて夫々の車輪WFL,WFR,WRL,WRRに制動力を発生させる例えばディスクロータやキャリパ等からなる制動力発生手段36FL,36FR,36RL,36RRと、によって構成される。この制動装置30は、夫々の車輪WFL,WFR,WRL,WRRに対して個別の大きさの制動力を発生させることができるものであり、この車輪WFL,WFR,WRL,WRR毎の制動力制御を電子制御装置1の制動制御手段1aがブレーキアクチュエータ34を制御することで実現させる。
【0021】
電子制御装置1には、設定した目標制御量又は/及び目標制御タイミング等の目標制御値に基づいて車両10の挙動を安定させる為の制御(以下、「車両挙動制御」という。)を行う車両制御手段が設けられている。本実施例1においては、その車両挙動制御として、旋回時の挙動の安定化を図る旋回制御について例示する。従って、この電子制御装置1には、その車両制御手段たる旋回制御手段1bが設けられている。
【0022】
ここで例示する旋回制御手段1bは、実際の旋回状態量(以下、「実旋回状態量」という。)と目標旋回状態量との差に応じて所望の旋回姿勢となるよう目標制御値(目標制御量又は/及び目標制御タイミング等)の設定を行い、その目標制御値で車両10を制御して旋回姿勢を安定させるように構成されている。その目標旋回状態量とは、車両10が所望の旋回姿勢になっているときの旋回状態量のことである。ここでは、実旋回状態量としての実際のヨーレート(以下、「実ヨーレート」という。)γrをヨーレートセンサ41で検出すると共に、目標旋回状態量としての目標ヨーレートγtを車両10の走行状態に基づいて求め、この実ヨーレートγrと目標ヨーレートγtとを比較する。
【0023】
その目標ヨーレートγtは、車両10の諸元(ホイールベースL)と、車両10の走行状態を表す走行状態量(車速V、操舵輪たる前輪WFL,WFRの転舵角θst、車両横加速度Gy)と、車両10の旋回特性を表す旋回特性指数値(スタビリティファクタKH、ヨーレート応答遅れ係数TP)と、を例えば下記の式1に代入して演算される。この式1の「s」は、ラプラス演算子である。
【0024】
【数1】
【0025】
ホイールベースLの情報は、車両固有の数値であり、予め電子制御装置1のROM等に記憶させておく。また、車速Vの情報は、車速検出手段によって検出させる。この車速検出手段としては、例えば、車速そのものを検出する車速センサ42や、各車輪WFL,WFR,WRL,WRRの車輪速度を検出する車輪速度センサ43FL,43FR,43RL,43RRを利用できる。転舵角θstは、例えば転舵角付与手段22に設けた転舵角センサ44によって検出させる。車両横加速度Gyは、車両横方向の加速度を検出する車両横加速度センサ45によって検出させる。
【0026】
また、スタビリティファクタKHとは、車両総重量M、ホイールベースL(設計値)、前軸から重心までの距離Lf、後軸から重心までの距離Lr、前輪FL,FRの等価コーナリングパワーCpf及び後輪WRL,WRRの等価コーナリングパワーCprによって車両10の旋回特性を表したものである。一方、ヨーレート応答遅れ係数Tpとは、車速Vに依存する時定数を持つ1次遅れ系の車速Vに係る係数のことであり、ホイールベースL(設計値)、前輪WFL,WFRの等価コーナリングパワーCpf、後輪WRL,WRRの等価コーナリングパワーCpr及びヨー慣性モーメントIzによって車両10の旋回特性を表したものである。これらスタビリティファクタKHやヨーレート応答遅れ係数TPは、一般に、車両10のモデルを線形2輪モデルとした下記の式2,3を用いて各々算出できる。
【0027】
【数2】
【0028】
【数3】
【0029】
ここで、従来においては、車両10の重心位置を不変としている。これが為、前軸から重心までの距離Lfや後軸から重心までの距離Lrについては、設計値として予め用意されている。
【0030】
また、従来においては、車両総重量Mについても不変として考えているので設計値として用意されており、これが為、前輪WFL,WFRと後輪WRL,WRRの夫々の等価コーナリングパワーCpf,Cprの情報やヨー慣性モーメントIzの情報が車両固有の一定値として用意されている。
【0031】
旋回制御手段1bは、車両10の諸元や走行状態量等に基づいて目標ヨーレートγtを求め、検出された実ヨーレートγrとの比較を行う。そして、この旋回制御手段1bは、実ヨーレートγrの方が目標ヨーレートγtよりも大きければ、動力源の出力を絞ると共に車両前側の旋回外輪に制動力を発生させ、実ヨーレートγrの方が目標ヨーレートγtよりも小さければ、動力源の出力を絞ると共に車両後側の旋回内輪に制動力を発生させる。その制御対象の車輪に対しては、実ヨーレートγrと目標ヨーレートγtの差が大きいほど大きな制動力を発生させる。これにより、この旋回制御手段1bは、車両10の旋回姿勢を安定方向へと制御する。
【0032】
ところで、車両総重量Mとは、車両10そのものの重量である車両重量M1と、車両10に搭乗している乗員や積載している荷物の合計である乗員及び荷物の総重量M2と、を加算したものであるので、その乗員及び荷物の総重量M2によって変化する変数である。また、乗員の着座位置や荷物の積載位置は、設計値としての車両10の重心位置(以下、「設計車両重心位置」という。)P0に対して車両10の前後左右方向に離れている。これが為、乗員の乗り降りや荷物の積み卸し等により車両総重量Mが変化した際には、車両重心位置Pが設計車両重心位置P0に対してずれる。従って、厳密には、線形2輪モデルにおける車両前後方向の設計車両重心位置P0に基づいて求めた前軸から重心までの距離Lfや後軸から重心までの距離Lrが上述した設計値通りにはならない。また、コーナリングパワーとは、厳密に観ると、図2に示す如く、前輪WFL,WFRであれば前軸に働く荷重(以下、「前軸重量」という。)Mf、後輪WRL,WRRであれば後軸に働く荷重(以下、「後軸重量」という。)Mrに応じて変化する値であり、荷重が大きいほど大きくなる。そして、その前軸重量Mfや後軸重量Mrは、車両総重量Mや車両重心位置Pの変化によって変化することが知られている。従って、前輪WFL,WFRと後輪WRL,WRRの夫々の等価コーナリングパワーCpf,Cprは、車両総重量Mや車両重心位置Pの変化に伴い変わるので、設計値通りにならない。また、ヨー慣性モーメントIzは、厳密に観ると、図3に示す如く、車両総重量Mに応じて変化する値であり、車両総重量Mが重いほど大きくなるので、設計値通りにならない。
【0033】
このことから、実際のスタビリティファクタKHやヨーレート応答遅れ係数TPは、車両総重量Mの設計値に対する変化とこの変化に伴う車両重心位置Pの変化に応じて値が変わるものと云える。つまり、従来用いていたスタビリティファクタKHやヨーレート応答遅れ係数TPは、実際の値に対して車両総重量Mや車両重心位置Pの変化分だけずれが生じている。これが為、目標ヨーレートγtについても、設計値通りの車両総重量Mと車両重心位置P(=P0)でなければ、その変化分だけ本来の値に対してずれている。この目標ヨーレートγtの実際の値とのずれは、実ヨーレートγrとの差に表れるので、そのずれ量が多いほど(つまり車両総重量Mと車両重心位置Pの変化が大きいほど)、旋回制御時の制御対象の車輪に対して発生させる制動力を本来必要とされる大きさから外していく。従って、車両10は、実際の車両総重量Mや車両重心位置Pが設計値からずれるほど、所望の旋回姿勢に制御されにくくなる。そこで、本実施例1の電子制御装置1には、車両総重量Mの変化とこの変化に伴う車両重心位置Pの変化を考慮したスタビリティファクタKHやヨーレート応答遅れ係数TPの設定を行う旋回特性指数設定手段1cを設けている。
【0034】
図4に、実情に沿った車両10の線形2輪モデルの簡易図を示す。
【0035】
本図において、「Lf1」は前軸から車両重量M1が荷重として働く作用点m1までの距離、「Lf2」は前軸から乗員及び荷物の総重量M2が荷重として働く作用点m2までの距離を表している。
【0036】
その作用点m1は、乗員も荷物も無い車両10そのものの重心位置(線形2輪モデルにおける設計値の重心位置)に相当する。従って、前軸から作用点m1までの距離Lf1は、設計値として用意しておくことができる。
【0037】
次に、作用点m2は、乗員の着座位置や荷物の積載位置によって決まる。ここで、その乗員の着座位置や荷物の積載位置は、如何様な車両10においても予め決められている。これが為、乗員や荷物が車両10のどの位置に荷重として働くのかを予め近似的に求めることができるので、作用点m2としては、その近似的に求めた位置を設定しておけばよい。つまり、前軸から作用点m2までの距離Lf2は、設計値として用意しておくことができる。この近似による考え方は、夫々の着座位置が設計車両重心位置P0の近くにあり、且つ、前後左右に広い荷室ではない車両10、例えばセダンタイプやクーペタイプの車両10において特に有用である。
【0038】
一方、乗車定員の多いバス等の車両10においては、乗車人数、乗員の着座位置や立ち位置に応じて作用点m2が大きく変わる。また、荷室が少なくとも前後又は左右に広いトラック等の車両10においては、荷物の量や積載位置に応じて作用点m2が大きく変わる。従って、これらの様な車両10では、作用点m2を一箇所に決めがたいので、その作用点m2が求められるように旋回特性指数設定手段1cを構成しておけばよい。例えば、旋回特性指数設定手段1cは、圧電素子等の様な加圧の有無を検知可能な加圧状態検知手段を利用し、その検出信号に基づいて作用点m2を演算することができる。バス等の車両10では、その加圧状態検知手段を各座席に配設すると共に床に略等間隔で複数個配設して、乗員の着座位置や立ち位置が把握できるようにすればよく、トラック等の車両10においては、その加圧状態検知手段を荷室の床に略等間隔で複数個配設して、荷物の積載位置が把握できるようにすればよい。この加圧状態検知手段は、座席と荷室の双方に配設し、更にバス等の乗員が立つことのある車両ならば立ち位置のある床にも配設して、作用点m2の演算精度が高まるようにしてもよい。また、旋回特性指数設定手段1cは、荷重を検出する荷重計等の荷重検出手段を利用することもできる。その荷重検出手段の配設場所は、加圧状態検知手段と同等にすればよい。その荷重検出手段は、乗員の着座位置や立ち位置、荷物の積載位置のみならず、乗員や荷物の重量についても把握できる。これが為、荷重検出手段は、座席と荷室の双方に配設し、更にバス等の乗員が立つことのある車両10ならば立ち位置のある床にも配設して、作用点m2の演算精度を高めると共に、乗員及び荷物の総重量M2も検出できるようにしてもよい。
【0039】
これに対して、そのバス等の車両10であっても、乗車人数や乗員の配置が略一定になる車両又はこれらが略一定になる走行条件の場合には、作用点m2が大幅に変動しない。また、トラック等の車両10であっても、乗車人数や乗員の配置、そして荷物の種類や積載位置が略一定になる車両10又はこれらが略一定になる走行条件の場合にも、作用点m2が大幅に変動しない。これが為、これらのような場合には、前軸から作用点m2までの距離Lf2を設計値として用意しておくことも可能である。特に各乗員が皆同一人であるときや各乗員の着座位置までもが一定であるときには、作用点m2が殆ど変動しないので、より精度の高い設計値としての距離Lf2の情報を得ることができる。従って、これらのような場合には、距離Lf2の情報を設計値として用意できるようにしておけばよい。
【0040】
図4の「LfZAN」は、車両総重量Mによる前軸から現状における車両重心位置Pまでの距離を表しており、線形2輪モデルにおける車両前後方向の重心位置(以下、「前後重心位置」という。)と云える。この前後重心位置LfZANについては、下記の式4を用いて電子制御装置1の重心位置演算手段1dが求める。
【0041】
【数4】
【0042】
この前後重心位置LfZANを演算する際には、車両重量M1、乗員及び荷物の総重量M2、前軸から作用点m1までの距離Lf1並びに前軸から作用点m2までの距離Lf2の情報が必要になる。その夫々の距離Lf1,Lf2については、上述した設定値や演算値を利用する。また、車両重量M1は、設計値を利用できるので、これを用いる。これらに対して、乗員及び荷物の総重量M2は、上述したように最低限必要となる個数の荷重検出手段が搭載されていればその検出値を利用すればよいが、その個数分搭載されていなければ別の方法で求める必要がある。本実施例1においては、電子制御装置1に重量演算手段1eを用意しており、これを利用する。
【0043】
その重量演算手段1eは、荷重検出手段が十分な個数搭載されている場合、各荷重検出手段の検出信号を利用して乗員及び荷物の総重量M2の演算を行うことができる。この場合、その乗員及び荷物の総重量M2と車両重量M1とを加算することによって車両総重量Mが求められる。また、そのような複数個の荷重検出手段に替えて、車両総重量Mの検出ができる重量検出手段を利用してもよい。この重量検出手段としては、例えばサスペンション等に配設して静的な状態での車両総重量Mを検出するものが知られている。
【0044】
一方、この重量演算手段1eは、荷重検出手段が十分に搭載されていない場合、この技術分野における周知の手法によって先ず車両総重量Mを推定する。この場合の重量演算手段1eは、エンジンの出力トルク又は車両駆動力、車両加速度又は車両減速度、車速等の情報を利用して車両総重量Mを推定することができる。例えば、この重量演算手段1eは、或る大きさのエンジンの出力トルク(又は車両駆動力)が発生している状態におけるアクセル開度(又はスロットル開度)に対する車両加速度又は車両減速度の大きさに応じて車両総重量Mの推定を行う。その際、車両総重量Mは、そのアクセル開度(又はスロットル開度)に対する車両加速度が小さいほど重くなり、アクセル開度(又はスロットル開度)に対する車両減速度が大きいほど重くなる。そして、重量演算手段1eは、その推定した車両総重量Mから設計値たる車両重量M1を減算して乗員及び荷物の総重量M2を推定する(M2=M−M1)。エンジンの出力トルクについては、エンジン回転数等に基づき演算したものを利用してもよく、電子制御装置1からエンジンへの指令値を利用してもよい。車両加速度又は車両減速度は、車両前後加速度センサの検出信号を利用して検出すればよい。車速は、車速センサや車輪速度センサの検出信号を利用して検出すればよい。
【0045】
車両総重量Mの変化(換言するならば乗員及び荷物の総重量M2の変化)と車両重心位置Pの変化を考慮したスタビリティファクタKHは、上記式2に基づく下記の式5を用いて演算する。
【0046】
【数5】
【0047】
この式5において、車両重量M1とホイールベースL以外のパラメータは、全て車両総重量Mと車両重心位置Pの変化に応じて変化する変数である。乗員及び荷物の総重量M2や前後重心位置LfZANの情報は、上述したようにして得ることができる。また、前輪WFL,WFRと後輪WRL,WRRの夫々の等価コーナリングパワーCpf,Cprについては、例えば図2に基づく荷重の2次式で近似することができるので、この近似式としての下記の式6,7で夫々求めることにする。
【0048】
【数6】
【0049】
【数7】
【0050】
これら式6,7における「af」、「ar」、「bf」、「br」、「cf」及び「cr」は、定数である。尚、「af≠0」、「ar≠0」である。また、これら式6,7における前軸重量Mfや後軸重量Mrは、下記の式8,9で夫々求めることができる。
【0051】
【数8】
【0052】
【数9】
【0053】
また、車両総重量Mの変化(乗員及び荷物の総重量M2の変化)と車両重心位置Pの変化を考慮したヨーレート応答遅れ係数TPは、上記式3を用いて演算する。この式3の中のヨー慣性モーメントIzは、前述したように車両総重量Mに応じて変化する。図3においては、車両総重量Mとヨー慣性モーメントIzが下記の式10の如き関係にあるものとして例示している。この式10の「k」は比例係数であり、「Io」はオフセットである。また、この式3の中の前輪WFL,WFRと後輪WRL,WRRの夫々の等価コーナリングパワーCpf,Cprは、車両重心位置Pの変化に伴い変わる。
【0054】
【数10】
【0055】
以下に、本実施例1の車両制御装置におけるスタビリティファクタKHと前後重心位置LfZANとヨーレート応答遅れ係数TPの設定動作について図5のフローチャートに基づき説明する。
【0056】
電子制御装置1の旋回特性指数設定手段1cは、イグニッションのオン信号を受信した際に(ステップST1)、スタビリティファクタKH、前後重心位置LfZAN及びヨーレート応答遅れ係数TPの初期化を行う(ステップST2,ST3,ST4)。このとき、旋回特性指数設定手段1cは、前回、つまり最後に記憶したスタビリティファクタKHと前後重心位置LfZANとヨーレート応答遅れ係数TPの情報を電子制御装置1の記憶手段から読み込み、これらを各々初期値として設定する。
【0057】
以後、設定停止条件が成立するまでは、これ以降の演算処理を繰り返す。尚、その設定停止条件とは、以下に示す旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)と前後重心位置LfZANの設定動作を停止させる際の条件のことである。例えば、旋回特性指数設定手段1cには、イグニッションがオフになった後、所定時間が経過したときに、車両10が一時的な停車ではなく駐車等の継続的な停車であると判断して、設定停止条件が成立したと判定させる。
【0058】
先ず、旋回特性指数設定手段1cは、現在の車両総重量Mの情報を取得すると共に、その情報についての信頼度(以下、「重量信頼度」という。)trmの情報も取得する(ステップST5)。
【0059】
その車両総重量Mについては、前述したようにして重量演算手段1eに推定又は検出させる。また、重量信頼度trmについては、例えば、乗員及び荷物の総重量M2の検出又は車両総重量Mの推定が車両加速度又は車両減速度の大きいときに行われたものであるほど高くする。重量演算手段1eは、最も信頼度が低ければ「0」、最も信頼度が高ければ「1」とし、0〜1の範囲内で重量信頼度trm(0≦trm≦1)を求めて設定する。この重量演算手段1eには、車両総重量Mの演算と重量信頼度trmの演算を常時又は所定時間毎に実行させ、例えば電子制御装置1の記憶手段に記憶させる。旋回特性指数設定手段1cは、その記憶手段から車両総重量Mと重量信頼度trmを読み込み、これらを現在の車両総重量Mと重量信頼度trmにする。
【0060】
続いて、旋回特性指数設定手段1cは、旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)と前後重心位置LfZANの設定が可能であるのか否かを判定する(ステップST6)。
【0061】
これらを求める際には、車両総重量M(=M1+M2)の情報が必要になる。従って、旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)と前後重心位置LfZANは、車両総重量Mについての重量信頼度trmが低いときに求めても、現状における正確な値を示していないので、今現在設定されているものと置き換えるべきでない。これが為、旋回特性指数設定手段1cには、取得した重量信頼度trmが高いときにこれらの設定が可能との判定を行わせる。ここでは、その重量信頼度trmと所定の閾値tr1(0<tr1<1)とを比較し、その重量信頼度trmが閾値tr1よりも大きければ、設定可能と判定する。その閾値tr1は、例えば、車両総重量Mの演算値と実測値とを重量信頼度trm毎に比較する実験を行い、その演算値と実測値の誤差が情報の信頼性の観点で許容し得ない上限のときの重量信頼度trmに設定する。
【0062】
旋回特性指数設定手段1cは、車両総重量Mについての重量信頼度trmが閾値tr1以下であり、旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)と前後重心位置LfZANの置き換えをすべきでないと判断(つまり設定不可能と判定)した場合、上記ステップST5に戻って、新たに車両総重量Mと重量信頼度trmの情報を取得する。
【0063】
一方、この旋回特性指数設定手段1cは、その重量信頼度trmが閾値tr1よりも大きく、旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)と前後重心位置LfZANの設定が可能であると判定した場合、取得した現在の車両総重量Mに基づいて上記式4から現在の車両の前後重心位置LfZANを重心位置演算手段1dに求めさせる(ステップST7)。
【0064】
このステップST7においては、先ず、設計値として用意されている車両重量M1と前軸から作用点m1までの距離Lf1以外のパラメータを求める。重心位置演算手段1dは、ステップST5で取得した車両総重量Mから車両重量M1を減算して、現在の乗員及び荷物の総重量M2を求める(M2=M−M1)。尚、上述したように、その乗員及び荷物の総重量M2を直接検出できるのならば、その検出結果を利用してもよい。また、この重心位置演算手段1dは、前軸から作用点m2までの距離Lf2を求める。この距離Lf2については、前述したように、設計値として近似的な値が用意可能ならばその用意された設定値を利用し、精度を高めるならば加圧状態検知手段や荷重検出手段の検出信号に基づき演算する。そして、このステップST7においては、これらの各種パラメータを上記式4に代入して現在の車両総重量Mに応じた前後重心位置LfZANを求める。
【0065】
次に、この旋回特性指数設定手段1cは、その前後重心位置LfZANの情報も利用して、現在の車両総重量Mと車両重心位置Pに応じたスタビリティファクタKHの演算を行う(ステップST8)。
【0066】
このステップST8においては、これまでの過程で得られていない前輪WFL,WFRと後輪WRL,WRRの夫々の等価コーナリングパワーCpf,Cprについて、上記式6〜9を用いて求める。これにより必要な各種パラメータが得られるので、旋回特性指数設定手段1cは、これらを上記式5に代入して現在の車両総重量Mに応じたスタビリティファクタKHを求める。
【0067】
また、この旋回特性指数設定手段1cは、現在の車両総重量Mと車両重心位置Pに応じたヨーレート応答遅れ係数TPを求める(ステップST9)。
【0068】
このステップST9においては、これまでの過程で得られていない現在の車両総重量Mに応じたヨー慣性モーメントIzを上記式10から求める。これにより必要な各種パラメータが得られるので、旋回特性指数設定手段1cは、これらを上記式3に代入して現在の車両総重量Mと車両重心位置Pに応じたヨーレート応答遅れ係数TPを求める。
【0069】
このようにして旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)と前後重心位置LfZANを求めた後、旋回特性指数設定手段1cは、その夫々の演算値を現在の車両総重量Mと車両重心位置Pに応じた旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)と前後重心位置LfZANとして設定する(ステップST10)。これらの設定値は、電子制御装置1の記憶手段に記憶させる。
【0070】
車両制御装置は、その車両総重量Mや車両重心位置Pの変化を考慮に入れて設定されたスタビリティファクタKHとヨーレート応答遅れ係数TPを用いて車両制御を実行する。つまり、旋回制御手段1bは、その現在の車両総重量Mと車両重心位置Pに応じた旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)や車両の走行状態を表す走行状態量(検出された車速V等)を上記式1に代入して目標ヨーレートγtを求め、実ヨーレートγrとの比較を行う。そして、この旋回制御手段1bは、その目標ヨーレートγtと実ヨーレートγrの差に応じた目標制御量(即ち制御対象の車輪の目標制動力)又は/及び目標制御タイミングの設定を行い、ブレーキアクチュエータ34をその目標制御タイミングで制御してその車輪に目標制動力を発生させる。その目標制御量や目標制御タイミングは、乗員の乗り降りや荷物の積み卸し等により変化した現在の車両総重量Mと車両重心位置Pが考慮されたものである。従って、車両制御装置は、現在の車両総重量Mと車両重心位置Pに応じた所望の旋回姿勢で車両10を旋回させることができる。
【0071】
ところで、上述した例示においては、ステップST7〜ST9で前後重心位置LfZANとスタビリティファクタKHとヨーレート応答遅れ係数TPの演算を行い、これらを現在の車両総重量Mと車両重心位置Pに応じた値として設定している。ここで、乗員の人数や着座位置、荷物の重さや積載位置を多様に変化させた際には、その変化の形態に合わせて車両総重量Mと車両重心位置Pも様々に変わる。これが為、乗員の人数等を様々に変化させた上記例示の設定動作やこれに類するシミュレーションを行うことによって、多様な乗員の人数等の条件(つまり多様な車両総重量Mと車両重心位置Pの条件)に応じた旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)と前後重心位置LfZANの値を得ることができる。そして、これらを集めることによって、図6〜8に示す前後重心位置LfZAN、スタビリティファクタKH及びヨーレート応答遅れ係数TPのマップデータを作ることができる。従って、上記ステップST7〜ST9においては、そのマップデータを利用して前後重心位置LfZAN、スタビリティファクタKH及びヨーレート応答遅れ係数TPの情報を導き出すようにしてもよい。そのマップデータは、例えば電子制御装置1の記憶手段に記憶させておく。
【0072】
その図6のマップデータは、車両総重量Mに応じた前後重心位置LfZANの情報を得る為のものである。この前後重心位置LfZANに対して、スタビリティファクタKHとヨーレート応答遅れ係数TPは、同じ車両総重量Mでも車両重心位置Pが異なれば違う値となる。これが為、図7,8のマップデータは、例えば、夫々に車両総重量Mに応じたスタビリティファクタKHとヨーレート応答遅れ係数TPの情報を得るべく構成するが、所定の車両重心位置P(具体的には前後重心位置LfZAN)毎に又はこの車両重心位置Pを含むその近傍で括った範囲毎に用意させる。
【0073】
これら図6〜8のマップデータは、上記ステップST7〜ST9の演算結果に従って値が更新されるものであってもよい。この場合、旋回特性指数設定手段1cには、旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)と前後重心位置LfZANの設定結果の学習機能を設けておく。尚、その前後重心位置LfZANの学習機能は、重心位置演算手段1dに設けてもよい。
【0074】
また、上述した例示においては、前後重心位置LfZAN、つまり現在の車両重心位置Pを上記式4から求めている。ここで、一般的な車両10であれば、セダンタイプ等であろうとトラック等であろうと、荷室は、設計車両重心位置P0よりも車両後方に位置している。これが為、車両重心位置Pは、積荷の量が増えるほど、換言するならば車両総重量Mの変化量が増量側に大きくなるほど設計車両重心位置P0に対して車両後方に移動する。そして、車両10の使用形態によっては、荷室内で略同じ場所に荷物を積載する場合もある。この場合には、車両総重量Mの変化量と車両重心位置Pの移動量の間に相関関係が生まれる。従って、そのような使用形態を採る車両10においては、車両総重量Mの変化量が増量側に大きくなるほど当該変化量分だけ車両重心位置Pが車両後方に移動したと推定し、その相関関係に基づいて現在の車両重心位置P(=前後重心位置LfZAN)の推定を行うよう重心位置演算手段1dを構成してもよい。そして、この車両10においては、現在の車両総重量Mの情報が得られれば、現在の車両重心位置Pを推定した後、上記式5や式3を用いてスタビリティファクタKHやヨーレート応答遅れ係数TPを求めることができ、上記式1から目標ヨーレートγtを求めることができる。これが為、この車両10においては、目標ヨーレートγtを求める際の演算処理の迅速化を図ることができる。また、この車両10においては、車両総重量Mに基づいて旋回特性指数値設定手段がスタビリティファクタKHやヨーレート応答遅れ係数TPを求めることになり、更に、その車両総重量Mに基づいて旋回制御手段1bが目標ヨーレートγtを求めることになる。
【0075】
[実施例2]
次に、本発明に係る車両制御装置の実施例2を図9から図13に基づいて説明する。
【0076】
本実施例2の車両制御装置は、前述した実施例1の車両制御装置と同様に、電子制御装置1の一機能として用意されており、旋回制御手段1b、重量演算手段1eや旋回特性指数設定手段1c等を備えている。また、この車両制御装置は、実施例1で例に挙げた車両10に適用されるものとして例示する。
【0077】
実施例1の旋回特性指数設定手段1cは、重量信頼度trmが高いときの車両総重量M及び車両重心位置Pの情報と前述した式5とを用いてスタビリティファクタKHを演算させ、その車両総重量M及び車両重心位置Pの情報と式3とを用いてヨーレート応答遅れ係数TPを演算させた。また、この実施例1の旋回特性指数設定手段1cは、その車両総重量M及び車両重心位置Pの情報とマップデータを利用してスタビリティファクタKHとヨーレート応答遅れ係数TPを求めさせた。
【0078】
これに対して、本実施例2の旋回特性指数設定手段1cは、その実施例1と同じようにしてスタビリティファクタKHとヨーレート応答遅れ係数TPの情報を得てもよいが、これらを推定させるように構成する。例えば、そのスタビリティファクタKHの推定やヨーレート応答遅れ係数TPの推定は、この技術分野における周知の手法を用いて実行させればよい。その推定手法は、その一例が特許文献(特開2004−26073号公報)に記載されており、これを利用すればよい。
【0079】
また、本実施例2の旋回特性指数設定手段1cは、推定されたスタビリティファクタ(以下、「推定スタビリティファクタ」という。)KHpの情報についての信頼度(以下、「推定スタビリティファクタ信頼度」という。)trkhと、推定されたヨーレート応答遅れ係数(以下、「推定ヨーレート応答遅れ係数」という。)TPpの情報についての信頼度(以下、「推定ヨーレート応答遅れ係数信頼度」という。)trtpと、を求めさせるようにも構成する。その推定スタビリティファクタ信頼度trkhについては、推定スタビリティファクタKHpの推定が車両横加速度Gyの大きいときに行われたものであるほど高くする。同様に、推定ヨーレート応答遅れ係数信頼度trtpについては、その推定ヨーレート応答遅れ係数TPpの推定が車両横加速度Gyの大きいときに行われたものであるほど高くする。旋回特性指数設定手段1cは、最も信頼度が低ければ「0」、最も信頼度が高ければ「1」とし、0〜1の範囲内で推定スタビリティファクタ信頼度trkh(0≦trkh≦1)と推定ヨーレート応答遅れ係数信頼度trtp(0≦trtp≦1)を各々求めて設定する。
【0080】
また、本実施例2の旋回特性指数設定手段1cは、重量信頼度trm、推定スタビリティファクタ信頼度trkh及び推定ヨーレート応答遅れ係数信頼度trtpが夫々に高ければ、旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)を夫々の推定値に基づいて更新(つまり学習)させる。例えば、本実施例2の電子制御装置1の記憶手段には、スタビリティファクタKHとヨーレート応答遅れ係数TPのマップデータが各々用意されている。スタビリティファクタKHのマップデータは、例えば、図9に示す如く、車両総重量Mに応じたスタビリティファクタKHの情報を得るべく構成したものであり、所定の車両重心位置P(前後重心位置LfZAN)毎に又はこの車両重心位置Pを含むその近傍で括った範囲毎に用意する。この図9のマップデータには、所定の重量で区切られた車両総重量Mの範囲(A〜H)毎のスタビリティファクタKHが登録されている。同様に、ヨーレート応答遅れ係数TPのマップデータは、例えば、図10に示す如く、車両総重量Mに応じたヨーレート応答遅れ係数TPの情報を得るべく構成したものであり、所定の車両重心位置P(前後重心位置LfZAN)毎に又はこの車両重心位置Pを含むその近傍で括った範囲毎に用意する。この図10のマップデータには、所定の重量で区切られた車両総重量Mの範囲(A〜H)毎のヨーレート応答遅れ係数TPが登録されている。本実施例2の旋回特性指数設定手段1cは、夫々のマップデータを推定スタビリティファクタKHpと推定ヨーレート応答遅れ係数TPpに基づき更新する。
【0081】
以下に、本実施例2の車両制御装置におけるスタビリティファクタKHとヨーレート応答遅れ係数TPの学習動作について図11のフローチャートに基づき説明する。
【0082】
本実施例2においても、旋回特性指数設定手段1cは、イグニッションのオン信号を受信した際に(ステップST11)、スタビリティファクタKHとヨーレート応答遅れ係数TPの初期化を行う(ステップST12,ST13)。このステップST12,ST13においては、例えば、前回、つまり最後に旋回制御手段1bが目標ヨーレートγtの演算時に設定したスタビリティファクタKHとヨーレート応答遅れ係数TPの情報を電子制御装置1の記憶手段から読み込み、これらを各々初期値として設定する。
【0083】
以後、学習停止条件が成立するまでは、これ以降の演算処理を繰り返す。尚、その学習停止条件とは、以下に示す旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)の学習動作を停止させる際の条件のことである。例えば、旋回特性指数設定手段1cには、イグニッションがオフになった後、所定時間t1が経過したときに、車両10が一時的な停車ではなく駐車等の継続的な停車であると判断して、学習停止条件が成立したと判定させる。その所定時間t1は、後述するステップST25で用いる所定時間t2よりも長い時間を設定する(t1>t2)。
【0084】
先ず、旋回特性指数設定手段1cは、実施例1と同様に、現在の車両総重量Mの情報と重量信頼度trmの情報を取得する(ステップST14)。
【0085】
また、この旋回特性指数設定手段1cは、スタビリティファクタKHの推定を行い(ステップST15)、この推定スタビリティファクタKHpの情報について推定スタビリティファクタ信頼度trkhの情報を求める(ステップST16)。
【0086】
また、この旋回特性指数設定手段1cは、ヨーレート応答遅れ係数TPの推定を行い(ステップST17)、この推定ヨーレート応答遅れ係数TPpの情報について推定ヨーレート応答遅れ係数信頼度trtpの情報を求める(ステップST18)。
【0087】
旋回特性指数設定手段1cは、現在の車両総重量M、推定スタビリティファクタKHp及び推定ヨーレート応答遅れ係数TPpの情報、そして、これらの信頼度(重量信頼度trm、推定スタビリティファクタ信頼度trkh及び推定ヨーレート応答遅れ係数信頼度trtp)の情報を得た後、その重量信頼度trmについての判定を行う(ステップST19)。
【0088】
実施例1でも説明したように、重量信頼度trmが低いときの旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)は、現状における正確な値を示していないので、今現在設定されているものと置き換えるべきでない。これが為、このステップST19において重量信頼度trmが低いと判定された場合には、推定スタビリティファクタKHpや推定ヨーレート応答遅れ係数TPpが学習結果として更新されないよう上記ステップST14に戻り、新たな車両総重量Mの情報と重量信頼度trmの情報を取得する。このステップST19においては、重量信頼度trmと所定の閾値tr2(0<tr2<1)とを比較して、重量信頼度trmが閾値tr2よりも大きければ、その重量信頼度trmが高いと判定し、重量信頼度trmが閾値tr2以下ならば、その重量信頼度trmが低いと判定する。その閾値tr2は、実施例1の閾値tr1と同じようにして設定すればよい。
【0089】
このステップST19において重量信頼度trmが高いと判定された場合、旋回特性指数設定手段1cは、推定ヨーレート応答遅れ係数信頼度trtpについての判定を行う(ステップST20)。
【0090】
例えば、ここでは、推定ヨーレート応答遅れ係数信頼度trtpと所定の閾値tr3(0<tr3<1)とを比較して、推定ヨーレート応答遅れ係数信頼度trtpが閾値tr3よりも大きければ、その推定ヨーレート応答遅れ係数信頼度trtpが高いと判定し、推定ヨーレート応答遅れ係数信頼度trtpが閾値tr3以下ならば、その推定ヨーレート応答遅れ係数信頼度trtpが低いと判定する。その閾値tr3は、推定ヨーレート応答遅れ係数TPpと例えば前述した式3の演算式で求めたヨーレート応答遅れ係数TPとを推定ヨーレート応答遅れ係数信頼度trtp毎に比較する実験を行い、これらの誤差が情報の信頼性の観点で許容し得ない上限のときの推定ヨーレート応答遅れ係数信頼度trtpに設定する。
【0091】
旋回特性指数設定手段1cは、このステップST20で推定ヨーレート応答遅れ係数信頼度trtpが低いと判定した場合、電子制御装置1の記憶手段に記憶してある既存の学習結果を利用し、ヨーレート応答遅れ係数TPを現在の車両総重量Mと車両重心位置Pに基づき再度初期化する(ステップST21)。従って、この旋回特性指数設定手段1cは、車両総重量M等の情報を得た後、上記式4で前後重心位置LfZANの演算を重心位置演算手段1dに実行させ、現在の車両重心位置Pを明らかにしておく。
【0092】
その学習結果とは、前述した図10に示すマップデータのことである。従って、このステップST21においては、現在の車両総重量Mと車両重心位置Pをそのマップデータに照らし合わせ、その車両総重量Mと車両重心位置Pに該当するものとして読み込んだヨーレート応答遅れ係数TPを再び初期値として設定する。ここでの初期値は、上記ステップST13の初期値と比すれば、現在の車両総重量Mと車両重心位置Pが考慮されているので、現状に沿った値と云える。
【0093】
この旋回特性指数設定手段1cは、このステップST21でヨーレート応答遅れ係数TPを設定した後、上記ステップST17に戻り、再びヨーレート応答遅れ係数TPの推定を行う。この場合には、ステップST19に進んだときに重量信頼度trmが高いと判定されることが判っているので、このステップST19の判定を省いてステップST20に進めてもよい。また、ここでは、重量信頼度trmが高いときの車両総重量Mの情報は常に高精度であるとしているので上記ステップST17に戻すが、車両総重量Mや車両重心位置Pとヨーレート応答遅れ係数TPの関係をより精度良く求めるのならば、上記ステップST14に戻して車両総重量M等の情報取得を行わせるようにしてもよい。
【0094】
旋回特性指数設定手段1cは、上記ステップST20で推定ヨーレート応答遅れ係数信頼度trtpが高いと判定した場合、推定スタビリティファクタ信頼度trkhについての判定を行う(ステップST22)。
【0095】
例えば、ここでは、推定スタビリティファクタ信頼度trkhと所定の閾値tr4(0<tr4<1)とを比較して、推定スタビリティファクタ信頼度trkhが閾値tr4よりも大きければ、その推定スタビリティファクタ信頼度trkhが高いと判定し、推定スタビリティファクタ信頼度trkhが閾値tr4以下ならば、その推定スタビリティファクタ信頼度trkhが低いと判定する。その閾値tr4は、推定スタビリティファクタKHpと例えば前述した式5の演算式で求めたスタビリティファクタKHとを推定スタビリティファクタ信頼度trkh毎に比較する実験を行い、これらの誤差が情報の信頼性の観点で許容し得ない上限のときの推定スタビリティファクタ信頼度trkhに設定する。
【0096】
旋回特性指数設定手段1cは、このステップST22で推定スタビリティファクタ信頼度trkhが低いと判定した場合、電子制御装置1の記憶手段に記憶してある既存の学習結果を利用し、スタビリティファクタKHを現在の車両総重量Mと車両重心位置Pに基づき再度初期化する(ステップST23)。
【0097】
その学習結果とは、前述した図9に示すマップデータのことである。従って、このステップST23においては、現在の車両総重量Mと車両重心位置Pをそのマップデータに照らし合わせ、その車両総重量Mと車両重心位置Pに該当するものとして読み込んだスタビリティファクタKHを再び初期値として設定する。ここでの初期値は、上記ステップST12の初期値と比すれば、現在の車両総重量Mと車両重心位置Pが考慮されているので、現状に沿った値と云える。
【0098】
この旋回特性指数設定手段1cは、このステップST23でスタビリティファクタKHを設定した後、上記ステップST15に戻り、再びスタビリティファクタKHの推定を行う。この場合には、重量信頼度trmと推定ヨーレート応答遅れ係数信頼度trtpが高いと判定されることが判っているので、ステップST17〜ST20を省いてステップST22に進めてもよい。また、ここでは、重量信頼度trmが高いときの車両総重量Mの情報は常に高精度であるとしているので上記ステップST15に戻すが、車両総重量Mや車両重心位置PとスタビリティファクタKHの関係をより精度良く求めるのならば、上記ステップST14に戻して車両総重量M等の情報取得を行わせるようにしてもよい。
【0099】
旋回特性指数設定手段1cは、上記ステップST22で推定スタビリティファクタ信頼度trkhが高いと判定した場合、つまり重量信頼度trm、推定スタビリティファクタ信頼度trkh及び推定ヨーレート応答遅れ係数信頼度trtpの全てが高いと判定した場合、旋回特性指数値(スタビリティファクタKH及びヨーレート応答遅れ係数TP)の学習が可能であるのか否かの判定を行う。ここでは、先ず、車両10が停止しているのか否かの判定を行う(ステップST24)。そして、旋回特性指数設定手段1cは、車両10が停止していれば、車両停止時間tsが所定時間t2を超えたか否かの判定を行う(ステップST25)。
【0100】
このステップST24,ST25の判定は、図9及び図10のマップデータの更新が可能であるのか否かの判定のことである。例えば、走行中のときには、乗員の乗り降りや荷物の積み卸しが行われないので、車両総重量Mや車両重心位置Pに変化が生じない。これに対して、車両10が停止した際には、乗員の乗り降りや荷物の積み卸しが行われて、車両総重量Mや車両重心位置Pに変化が生じることがある。これが為、車両停止時間tsが所定時間t2よりも長く続いたときには、改めて新たな車両総重量M等とスタビリティファクタKHやヨーレート応答遅れ係数TPとの対応関係を求めることにして、推定スタビリティファクタKHp及び推定ヨーレート応答遅れ係数TPpに基づいた図9及び図10のマップデータの更新を行うことにする。その所定時間t2は、例えば乗員の乗り降りや荷物の積み卸しに要する平均的な時間よりも短い時間に設定する。従って、上記ステップST24で走行中との判定が為された場合又は上記ステップST25で車両停止時間tsが所定時間t2を超えていない(ts≦t2)との判定が為された場合、旋回特性指数設定手段1cには、学習不可能と判定させる。一方、上記ステップST25で車両停止時間tsが所定時間t2を超えた場合、旋回特性指数設定手段1cには、学習可能と判定させる。
【0101】
ここでは、上記ステップST24で走行中との判定が為されたならば、上記ステップST14に戻って、車両総重量Mと車両重心位置Pに応じた推定スタビリティファクタKHpや推定ヨーレート応答遅れ係数TPpの演算を新たに行う。また、上記ステップST25で車両停止時間tsが所定時間t2を超えていないと判定されたならば、上記ステップST24に戻る。これらに対して、上記ステップST25で車両停止時間tsが所定時間t2を超えて学習可能と判定された場合、旋回特性指数設定手段1cは、現在の車両総重量M、現在の車両重心位置P、推定スタビリティファクタKHp及び推定ヨーレート応答遅れ係数TPpに基づいて、学習結果たる図9及び図10のマップデータを夫々更新する(ステップST26)。
【0102】
例えば、このステップST26においては、現在の車両総重量M及び車両重心位置Pに該当する図9のマップデータ内の既存のスタビリティファクタKHの学習値と推定スタビリティファクタKHpとに基づき平均値を求め、この平均値を新たなスタビリティファクタKHの学習値としてマップデータの更新を行う(図12)。ここで、更新前のスタビリティファクタKHの学習値は、過去に行われた学習の結果を表している。これが為、平均値を求める際には、更新前のスタビリティファクタKHの学習値に過去の更新回数Nを乗算し、これに推定スタビリティファクタKHpを加算して全ての更新回数N+1で平均を取ることが望ましい。また、重量信頼度trmや推定スタビリティファクタ信頼度trkhが高いほど、学習値が推定スタビリティファクタKHpに近づくよう重み付けしてもよい。
【0103】
また、このステップST26においては、現在の車両総重量M及び車両重心位置Pに該当する図10のマップデータ内の既存のヨーレート応答遅れ係数TPの学習値と推定ヨーレート応答遅れ係数TPpとに基づき平均値を求め、この平均値を新たなヨーレート応答遅れ係数TPの学習値としてマップデータの更新を行う(図13)。更新前のヨーレート応答遅れ係数TPの学習値についても過去に行われた学習の結果を表している。これが為、平均値を求める際には、更新前のヨーレート応答遅れ係数TPの学習値に過去の更新回数Nを乗算し、これに推定ヨーレート応答遅れ係数TPpを加算して全ての更新回数N+1で平均を取ることが望ましい。また、重量信頼度trmや推定ヨーレート応答遅れ係数信頼度trtpが高いほど、学習値が推定ヨーレート応答遅れ係数TPpに近づくよう重み付けしてもよい。
【0104】
ここで、本実施例2においては、車両10が停止中なのか走行中なのかを観察し、停車中ならば車両停止時間tsに応じて学習の要否を判断している。これに替えて、ステップST24においてイグニッションオフであるのか否かを判定させ、イグニッションオフならば、その状態がどれだけの時間続いているのか否かをステップST25において判定させてもよい。この場合には、イグニッションオフの状態が所定時間続いているときに、学習可能と判定させる。
【0105】
車両制御装置は、その車両総重量Mや車両重心位置Pの変化を考慮に入れて更新された学習結果を用いて実施例1と同様の車両制御を実行する。従って、この車両制御装置は、現在の車両総重量Mと車両重心位置Pに応じた所望の旋回姿勢で車両10を旋回させることができる。
【0106】
ところで、本実施例2の旋回特性指数設定手段1cは、上記ステップST26の学習動作を終えた後で、車両総重量Mの範囲毎で且つ所定の車両重心位置P毎又はこの車両重心位置Pを含むその近傍で括った範囲毎に、スタビリティファクタKHとヨーレート応答遅れ係数TPの標準偏差を各々演算させるよう構成してもよい。その夫々の標準偏差は、学習に使われた複数の推定スタビリティファクタKHpや推定ヨーレート応答遅れ係数TPpの情報のばらつき度合いを示すものである。そして、標準偏差が大きいときには、学習結果内のスタビリティファクタKHやヨーレート応答遅れ係数TPの精度が明白でなく、正確な値を示していない可能性もあるので、この精度の点で疑義のあるスタビリティファクタKHやヨーレート応答遅れ係数TPの情報を採用しない方が好ましい。これが為、かかる標準偏差の演算機能を有する場合、旋回特性指数設定手段1cは、ヨーレート応答遅れ係数TPの標準偏差が所定値(例えば学習結果内のヨーレート応答遅れ係数TPの精度が高いと云えない値の下限値)よりも小さいときに上記ステップST21の再初期化を行わせ、その標準偏差が所定値以上に大きければ上記ステップST21の再初期化を行わせないように構成すればよい。また、この旋回特性指数設定手段1cは、スタビリティファクタKHの標準偏差が所定値(例えば学習結果内のスタビリティファクタKHの精度が高いと云えない値の下限値)よりも小さいときに上記ステップST23の再初期化を行わせ、その標準偏差が所定値以上に大きければ上記ステップST23の再初期化を行わせないように構成すればよい。
【0107】
また、車両10によっては、その使用形態に或る程度の規則性を有している場合がある。例えば、略同じ時間帯に同一ルートで自宅から勤務地まで走行する場合、決められた運転者が種類や数量の同じ荷物を或場所から目的地まで運搬する場合等が該当する。そして、このような場合には、走行中の車両総重量Mや車両重心位置Pにも規則性があり、スタビリティファクタKHやヨーレート応答遅れ係数TPの推定精度が高くなり、高精度の学習結果を得ることができる。そこで、上述した夫々の標準偏差については、少なくとも出発地、目的地又は日時の内の何れか1つが同じときの推定スタビリティファクタKHp及び推定ヨーレート応答遅れ係数TPpに基づいて求めさせることが望ましく、高精度なものとなる。その出発地や目的地の情報については、カーナビゲーションシステムの地図情報及び自車位置情報等を利用して得ることができる。日時については、車両10やカーナビゲーションシステムの有する日時情報を利用すればよい。そして、旋回特性指数設定手段1cは、その少なくとも出発地、目的地又は日時の内の何れか1つの情報に基づいたヨーレート応答遅れ係数TPの標準偏差が上記の所定値よりも小さいときに上記ステップST21の再初期化を行わせ、その標準偏差が所定値以上に大きければ上記ステップST21の再初期化を行わせないように構成すればよい。また、この旋回特性指数設定手段1cは、その少なくとも出発地、目的地又は日時の内の何れか1つの情報に基づいたスタビリティファクタKHの標準偏差が上記の所定値よりも小さいときに上記ステップST23の再初期化を行わせ、その標準偏差が所定値以上に大きければ上記ステップST23の再初期化を行わせないように構成すればよい。
【0108】
このように、推定ヨーレート応答遅れ係数信頼度trtpや標準偏差を利用してスタビリティファクタKHやヨーレート応答遅れ係数TPの推定精度の判断を行えるが、ヨーレート応答遅れ係数TPの推定精度については、ヨー慣性モーメントIzの比較によっても判断することができる。例えば、車両総重量Mに基づいて上記式10からヨー慣性モーメントIz1を求める。また、推定ヨーレート応答遅れ係数TPpに基づいて上記式3の変形式(下記の式11)からヨー慣性モーメントIz2を求める。ここで、上記ステップST19の判定により車両総重量Mの情報が信頼性の高いものであることが判ったとすると、その車両総重量Mの情報を利用したヨー慣性モーメントIz1の信頼性も高いと云える。これが為、そのヨー慣性モーメントIz1とヨー慣性モーメントIz2を比較して、これらの差が所定値(例えば≒0)よりも小さければ、そのヨー慣性モーメントIz2が信頼の置ける値であるとの判断が可能になり、このヨー慣性モーメントIz2の演算に用いた推定ヨーレート応答遅れ係数TPpが推定精度の高いものであると判断できる。
【0109】
【数11】
【0110】
ここで、前述した各実施例1,2においては車両挙動制御として旋回制御を挙げたが、その車両挙動制御は、必ずしもこれのみに限定するものではない。例えば、車両総重量Mや車両重心位置Pの変化は、前述したように前軸重量Mfや後軸重量Mrを変化させる。発進時や加速時の駆動輪の空転を抑えるトラクション制御においては、その目標制御量(動力源の目標出力や駆動輪の目標制動力)や目標制御タイミングを決める際に、その前軸重量Mfや後軸重量Mrの変化を考慮する必要がある。例えば、前輪駆動車において前軸重量Mfが設計値等の基準状態に対して減少した場合には、その基準状態のときよりも駆動輪の目標制動力を大きくしなければ、その駆動輪の空転を適切に抑え込めない可能性がある。これが為、この場合には、トラクション制御手段が前軸重量Mfの減少分に応じて駆動輪の目標制動力を大きくする必要がある。そして、その前軸重量Mfの減少分とは、車両総重量Mや車両重心位置Pの変化量に依存する。従って、本発明に係る車両挙動制御にはそのトラクション制御も含まれ、そのトラクション制御手段は、本発明に係る車両制御手段となる。
【0111】
また、前述した各実施例1,2においては車両総重量Mの変化と当該車両総重量Mの変化に伴う車両重心位置Pの変化に応じて目標制御値を変更するよう構成したが、その目標制御値は、車両総重量Mの変化に応じて変更させるよう構成してもよい。これは、例えば荷物の積載位置が大凡決められている車両で車両総重量Mが変化すると、その車両総重量Mの変化量を把握することで車両重心位置Pの変化を推定できるからであり、車両総重量Mの変化さえ知ることができれば適切な目標制御値の設定が可能だからである。また、これによれば、例えば車両重心位置Pに対して荷物の積載位置が車両後方にあるトラック等の車両においては、車両総重量Mが重くなるほど車両重心位置Pが車両後方に移ると判断することができる。従って、目標制御値については、その判断の結果としての車両重心位置Pに応じて変更させるよう構成してもよい。
【産業上の利用可能性】
【0112】
以上のように、本発明に係る車両制御装置は、車両総重量や車両重心位置の変化に対応させた適切な車両挙動制御を実行させる技術として有用である。
【符号の説明】
【0113】
1 電子制御装置(ECU)
1a 制動制御手段
1b 旋回制御手段(車両制御手段)
1c 旋回特性指数設定手段
1d 重心位置演算手段
1e 重量演算手段
10 車両
20 転舵装置
30 制動装置
41 ヨーレートセンサ
42 車速センサ
43FL,43FR,43RL,43RR 車輪速度センサ
44 転舵角センサ
45 車両横加速度センサ
P 車両重心位置
WFL,WFR,WRL,WRR 車輪
【特許請求の範囲】
【請求項1】
設定した目標制御量又は/及び目標制御タイミングで車両の挙動制御を行う車両制御装置において、
車両総重量の変化に応じて前記目標制御量又は/及び前記目標制御タイミングを変更する車両制御手段を設けたことを特徴とする車両制御装置。
【請求項2】
設定した目標制御量又は/及び目標制御タイミングで車両の挙動制御を行う車両制御装置において、
車両総重量が重くなるほど車両重心位置が車両後方に移ると判断し、該車両重心位置に応じて前記目標制御量又は/及び前記目標制御タイミングを変更する車両制御手段を設けたことを特徴とする車両制御装置。
【請求項3】
設定した目標制御量又は/及び目標制御タイミングで車両の挙動制御を行う車両制御装置において、
車両総重量の変化と当該車両総重量の変化に伴う車両重心位置の変化に応じて前記目標制御量又は/及び前記目標制御タイミングを変更する車両制御手段を設けたことを特徴とする車両制御装置。
【請求項4】
車両総重量を推定又は検出する重量演算手段と、車両重心位置を推定又は検出する重心位置演算手段と、車両の旋回特性を表す旋回特性指数値を車両総重量と車両重心位置に応じて設定する旋回特性指数設定手段と、を設け、
前記車両制御手段は、車両の走行状態を表す走行状態量と車両総重量及び車両重心位置に応じた前記旋回特性指数値とに基づいて車両が所望の旋回姿勢となる前記目標制御量を設定するように構成したことを特徴とする請求項3記載の車両制御装置。
【請求項5】
前記車両制御手段は、車両の走行状態を表す走行状態量並びに車両総重量及び車両重心位置に応じた前記旋回特性指数値に基づいて所望の旋回姿勢となる目標旋回状態量を求め、該目標旋回状態量と実際の旋回状態量との差に応じて前記目標制御量を設定するように構成したことを特徴とする請求項4記載の車両制御装置。
【請求項6】
前記重心位置演算手段は、車両総重量の変化量が増量側に大きくなるほど当該変化量分だけ車両重心位置が車両後方に移動したと推定するように構成したことを特徴とする請求項4又は5に記載の車両制御装置。
【請求項1】
設定した目標制御量又は/及び目標制御タイミングで車両の挙動制御を行う車両制御装置において、
車両総重量の変化に応じて前記目標制御量又は/及び前記目標制御タイミングを変更する車両制御手段を設けたことを特徴とする車両制御装置。
【請求項2】
設定した目標制御量又は/及び目標制御タイミングで車両の挙動制御を行う車両制御装置において、
車両総重量が重くなるほど車両重心位置が車両後方に移ると判断し、該車両重心位置に応じて前記目標制御量又は/及び前記目標制御タイミングを変更する車両制御手段を設けたことを特徴とする車両制御装置。
【請求項3】
設定した目標制御量又は/及び目標制御タイミングで車両の挙動制御を行う車両制御装置において、
車両総重量の変化と当該車両総重量の変化に伴う車両重心位置の変化に応じて前記目標制御量又は/及び前記目標制御タイミングを変更する車両制御手段を設けたことを特徴とする車両制御装置。
【請求項4】
車両総重量を推定又は検出する重量演算手段と、車両重心位置を推定又は検出する重心位置演算手段と、車両の旋回特性を表す旋回特性指数値を車両総重量と車両重心位置に応じて設定する旋回特性指数設定手段と、を設け、
前記車両制御手段は、車両の走行状態を表す走行状態量と車両総重量及び車両重心位置に応じた前記旋回特性指数値とに基づいて車両が所望の旋回姿勢となる前記目標制御量を設定するように構成したことを特徴とする請求項3記載の車両制御装置。
【請求項5】
前記車両制御手段は、車両の走行状態を表す走行状態量並びに車両総重量及び車両重心位置に応じた前記旋回特性指数値に基づいて所望の旋回姿勢となる目標旋回状態量を求め、該目標旋回状態量と実際の旋回状態量との差に応じて前記目標制御量を設定するように構成したことを特徴とする請求項4記載の車両制御装置。
【請求項6】
前記重心位置演算手段は、車両総重量の変化量が増量側に大きくなるほど当該変化量分だけ車両重心位置が車両後方に移動したと推定するように構成したことを特徴とする請求項4又は5に記載の車両制御装置。
【図1】

【図2】
【図3】
【図4】

【図5】

【図6】

【図7】
【図8】

【図9】
【図10】
【図11】

【図12】

【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2010−253978(P2010−253978A)
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願番号】特願2009−102978(P2009−102978)
【出願日】平成21年4月21日(2009.4.21)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願日】平成21年4月21日(2009.4.21)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]