
車両制御装置
【課題】運転者の違和感を低減してドライバビリティを向上させる。
【解決手段】本発明の車両の制御装置40は、運転者により所定の加減速操作がなされているか否かを判定する加減速判定部61と、動力伝達経路のうち遊びのある係合部分36a,37aに対して動力伝達上流側にある入力軸24と、係合部分36a,37aに対して動力伝達下流側にある出力軸28との相対回転位置X及び相対回転速度Vの少なくとも一方の値を検出する動力伝達状態検出部62と、加減速判定部61により前記加減速操作がなされていると判定された場合には、動力伝達状態検出部62により検出された値に応じて、動力伝達部材36,37間の接触速度及び伝達トルクの少なくとも一方が小さくなるように入力軸24又は出力軸28を加減速させる加減速制御を実行する加減速制御部63とを備えている。
【解決手段】本発明の車両の制御装置40は、運転者により所定の加減速操作がなされているか否かを判定する加減速判定部61と、動力伝達経路のうち遊びのある係合部分36a,37aに対して動力伝達上流側にある入力軸24と、係合部分36a,37aに対して動力伝達下流側にある出力軸28との相対回転位置X及び相対回転速度Vの少なくとも一方の値を検出する動力伝達状態検出部62と、加減速判定部61により前記加減速操作がなされていると判定された場合には、動力伝達状態検出部62により検出された値に応じて、動力伝達部材36,37間の接触速度及び伝達トルクの少なくとも一方が小さくなるように入力軸24又は出力軸28を加減速させる加減速制御を実行する加減速制御部63とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、動力源から駆動輪への動力伝達経路中の動力伝達部材が互いに遊びをもって係合されてなる車両の制御装置に関するものである。
【背景技術】
【0002】
自動二輪車等の車両では、エンジンから駆動輪までの動力伝達経路中に、ギヤ、ドッグクラッチ、チェーン、スプロケット、スプラインなどの種々の動力伝達部材が存在し、これらの動力伝達部材は、動力伝達経路上で隣接する動力伝達部材と遊びをもって係合している。このような車両では、エンジン回転数の増減やエンジンブレーキ等によって、動力伝達経路上で遊びを境界とした上流側の動力伝達部材と下流側の動力伝達部材とで回転速度差が生じ、これらの動力伝達部材が遊びの範囲内で一時的に離れ、反対側の面で再接触する。このときの接触速度や伝達トルクが大きいと、そのショックが運転者に伝わり、運転者に不快感を与える。このような観点から、動力伝達経路における入力軸と出力軸との間の相対回転位置及び/又は相対回転速度に基づいて入力軸及び/又は出力軸を加減速する技術が提案されている(例えば、特許文献1参照)。この技術によれば、エンジンから駆動輪への動力伝達経路中の隣接する動力伝達部材同士が遊びの範囲内で相対変位して再接触するときの接触速度及び/又は伝達トルクを低減させることができ、接触ショックを和らげることが可能となる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−321088号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、駆動輪に対する地面からの負荷が瞬間的に増大した場合等には、入力軸と出力軸との間に相対回転速度が発生することとなる。例えば、車両が荒い路面の走行している時などには、駆動輪に対する地面からの負荷が繰り返し変動し、入力軸と出力軸との間の相対回転速度が周期的に発生することとなる。そのように相対回転速度が発生するたびに接触ショックを緩和するための加減速制御が実行されてしまうと、頻繁に瞬間的な加減速が生じるため、運転者に違和感を生じさせてドライバビリティが低下することとなる。
【0005】
そこで本発明は、運転者の違和感を低減してドライバビリティを向上させることを目的としている。
【課題を解決するための手段】
【0006】
本発明は前記事情に鑑みてなされたものであり、本発明に係る車両制御装置は、動力源から駆動輪への動力伝達経路中の動力伝達部材が互いに遊びをもって係合されてなる車両の制御装置であって、運転者により所定の加減速操作がなされているか否かを判定する加減速判定手段と、前記動力伝達経路のうち遊びのある係合部分に対して動力伝達上流側にある入力軸と、前記係合部分に対して動力伝達下流側にある出力軸との相対回転位置及び相対回転速度の少なくとも一方の値を検出する動力伝達状態検出手段と、前記加減速判定手段により前記加減速操作がなされていると判定された場合には、前記動力伝達状態検出手段により検出された値に応じて、前記動力伝達部材間の接触速度及び伝達トルクの少なくとも一方が小さくなるように前記入力軸又は前記出力軸を加減速させる加減速制御を実行する加減速制御手段とを備えている。
【0007】
前記構成によれば、動力伝達部材間の衝突ショックが大きくなる加減速操作時に、入力軸又は出力軸を加減速して動力伝達部材間の接触速度及び/又は伝達トルクが小さくなるようにしたため、運転者に伝わるショックを抑制できるとともに、入力軸と出力軸との間に相対回転速度が発生するたびに加減速制御が実行されて頻繁に瞬間的な減速が生じるのを防止できる。よって、運転者の違和感が低減し、ドライバビリティが向上する。
【0008】
前記加減速判定手段は、スロットル開度センサにより検出されたスロットル開度に応じて所定の加減速操作がなされているか否かを判定する構成としてもよいし、吸気圧センサにより検出された吸気圧に応じて所定の加減速操作がなされているか否かを判定する構成としてもよい。そうすれば、既存の部品を利用して加減速操作を容易に検出することができる。
【0009】
前記加減速判定手段は、前記動力源を減速状態から加速状態又は加速状態から減速状態に移行させるための運転者による操作の変化量が所定値より大きい過渡操作を前記加減速操作であると判定する構成としてもよい。
【0010】
車両が減速走行から加速走行又は加速走行から減速走行に移行する際には、前記遊びの範囲内において入力側の動力伝達部材が出力側の動力伝達部材の一方面から離れて他方面に衝突するよう動作する。そして、当該動作時には、動力伝達部材間の相対運動距離は最大となり且つ相対速度も大きくなることから、動力伝達部材間の衝突によるショックが特に大きくなって乗り心地を低下させうる。しかし前記構成によれば、当該動作時において動力伝達部材間の接触速度及び伝達トルクの少なくとも一方が小さくなるように入力軸又は出力軸を加減速させるようにしたので、加減速制御が頻繁に実行されることを防止しながらも好適に乗り心地を向上させることができる。
【0011】
前記動力源となるエンジンへの吸気量を調節するスロットル弁の開度を検出するスロットル開度センサを備え、前記加減速判定手段は、前記スロットル開度センサにより検出されたスロットル開度の差分が所定の正値の差分閾値より大きくなり、かつ、前記スロットル開度が所定の開度閾値よりも大きくなったときに、前記動力源を減速状態から加速状態に移行させる前記過渡操作がなされていると判定する構成としてもよい。
【0012】
前記構成によれば、車両が減速走行から加速走行に移行して動力伝達部材間で強い衝突が発生するときを簡素な構成で判断することができる。
【0013】
前記動力源となるエンジンへの吸気量を調節するスロットル弁の開度を検出するスロットル開度センサを備え、前記加減速判定手段は、前記スロットル開度センサにより検出されたスロットル開度の差分が所定の負値の差分閾値より小さくなり、かつ、前記スロットル開度が所定の開度閾値よりも小さくなったときに、前記動力源を加速状態から減速状態に移行させる前記過渡操作がなされていると判定する構成としてもよい。
【0014】
前記構成によれば、車両が加速走行から減速走行に移行して動力伝達部材間で強い衝突が発生するときを簡素な構成で判断することができる。
【0015】
前記加減速制御手段は、前記動力伝達状態検出手段で検出された前記相対回転速度の絶対値が所定の速度閾値より大きくなった場合に、前記加減速制御の実行を許可する構成としてもよい。
【0016】
前記構成によれば、相対回転速度が大きく動力伝達部材間で強い衝突が発生しうるときに加減速制御を行うようにしたので、乗り心地を向上させながらも加減速制御が頻繁に実行されることを防止できる。
【0017】
前記加減速制御手段は、前記加減速判定手段により前記加速操作がなされていると判定された場合には、前記動力伝達状態検出手段により検出された前記相対回転位置の絶対値が所定の位置閾値を超えた時点から前記加減速制御を開始する構成としてもよい。
【0018】
前記構成によれば、相対回転位置の絶対値が所定の位置閾値を超えるまで加減速制御は開始しないので、動力伝達部材間の衝突時に合わせて加減速制御を行うことができ、加減速制御が無駄に長く続くことを好適に防止することができる。
【0019】
前記加減速制御手段は、前記加減速制御の実行中において前記加減速判定手段により前記加減速操作がなされていないと判定されると前記加減速制御を終了する構成としてもよい。
【0020】
前記構成によれば、動力伝達部材間で強い衝突が発生しないときに、加減速制御が実行され続けてしまうことが防止され、ドライバビリティが更に向上する。
【0021】
前記動力源となるエンジンへの吸気量を調節するスロットル弁の開度を検出するスロットル開度センサを備え、前記加減速制御手段は、前記加減速制御の実行中において前記スロットル開度センサにより検出されたスロットル開度の差分の絶対値が所定の差分閾値以下となると前記加減速制御を終了する構成としてもよい。
【0022】
前記構成によれば、運転者による加減速操作の変化が小さいときに、過剰に加減速されることが防止され、運転フィーリングを向上させることができる。
【0023】
前記動力源となるエンジンの吸気圧を検出する吸気圧センサを備え、前記加減速制御手段は、前記加減速制御の実行中において前記吸気圧センサにより検出された吸気圧の差分の絶対値が所定の差分閾値以下となると前記加減速制御を終了する構成としてもよい。
【0024】
前記構成によれば、運転者による加減速操作の変化が小さいときに、過剰に加減速されることが防止され、運転フィーリングを向上させることができる。
【0025】
前記加減速制御手段は、前記加減速制御の実行開始から第1所定時間が経過すると前記加減速制御の実行を終了させる構成としてもよい。
【0026】
前記構成によれば、加減速制御が無駄に長く続くことが防止され、運転フィーリングを向上することができる。
【0027】
前記加減速制御手段は、前記加減速制御の終了後の第2所定時間内は前記加減速制御の実行を禁止する構成としてもよい。
【0028】
前記構成によれば、加減速制御が繰り返し頻繁に実行されることが防止され、運転フィーリングを向上することができる。
【0029】
前記動力伝達経路中に設けられたクラッチが遮断されたか否かを判定する前記クラッチ遮断判定手段を備え、前記加減速制御手段は、前記クラッチ遮断判定手段により前記クラッチが遮断されたと判定された場合には、前記加減速制御の実行を禁止する構成としてもよい。
【0030】
前記構成によれば、動力源から駆動輪への動力伝達が行われないクラッチ遮断時において、加減速制御が無駄に実行されることが防止される。よって、クラッチが遮断状態から接続状態に戻ったときの運転性能を良好に保つことができる。
【0031】
前記駆動輪のブレーキが作動したか否かを判定するブレーキ判定手段を備え、前記加減速制御手段は、前記ブレーキ判定手段により前記ブレーキが作動したと判定された場合には、前記加減速制御の実行を禁止する構成としてもよい。
【0032】
前記構成によれば、駆動輪のブレーキ時に加減速制御が無駄に実行されることが防止され、ブレーキが解除されたときの運転性能を良好に保つことができる。
【発明の効果】
【0033】
以上の説明から明らかなように、本発明によれば、運転者の違和感が低減し、ドライバビリティが向上する。
【図面の簡単な説明】
【0034】
【図1】本発明の第1実施形態に係る自動二輪車の左側面図である。
【図2】図1に示す自動二輪車の主に駆動系を説明する模式図である。
【図3】(a)は図2に示す駆動系のドッグクラッチの断面図、(b)はそのIIIb−IIIb断面図である。
【図4】図1に示す自動二輪車に搭載された車両制御装置の全体を示すブロック図である。
【図5】図4に示す車両制御装置の要部を説明するブロック図である。
【図6】図4に示す車両制御装置の減速走行から加速走行への移行時における制御を説明するフローチャートである。
【図7】図6に示す制御を説明するタイミングチャートである。
【図8】図4に示す車両制御装置の加速走行から減速走行への移行時における制御を説明するフローチャートである。
【図9】図8に示す制御を説明するタイミングチャートである。
【図10】本発明の第2実施形態に係る車両制御装置の要部を説明するブロック図である。
【図11】本発明の第3実施形態に係る車両制御装置の減速走行から加速走行への移行時における制御を説明するフローチャートである。
【図12】図11に示す制御を説明するタイミングチャートである。
【発明を実施するための形態】
【0035】
以下、本発明に係る実施形態を図面を参照して説明する。なお、以下の説明で用いる方向の概念は、自動二輪車に騎乗した運転者から見た方向を基準とする。
【0036】
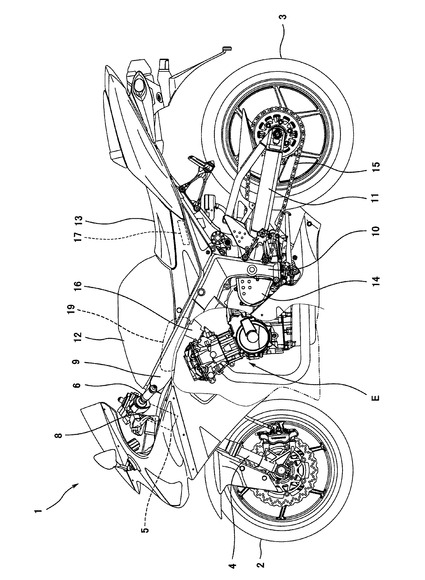
(第1実施形態)
図1は本発明の第1実施形態に係る自動二輪車1の左側面図である。図1に示すように、自動二輪車1(車両)は、従動輪である前輪2と、駆動輪である後輪3とを備えている。前輪2は略上下方向に延びるフロントフォーク4の下端部にて回転自在に支持されており、フロントフォーク4はブラケット(図示せず)を介してステアリング軸(図示せず)に支持されている。該ステアリング軸はヘッドパイプ5によって回転自在に支持されている。該ブラケットには左右へ延びるバー型のハンドル6が取り付けられている。ハンドル6には、運転者の右手により把持されるスロットルグリップ7(図4参照)が設けられており、手首のひねりによりスロットルグリップ7を回転させることで後述するスロットル装置16が操作される。ハンドル6には、運転者の左手により把持されるグリップの前方にクラッチレバー8が設けられている。
【0037】
ヘッドパイプ5からは左右一対のメインフレーム9が若干下方に傾斜しながら後方へ延びており、メインフレーム9の後部に左右一対のピボットフレーム10が接続されている。ピボットフレーム10には略前後方向に延びるスイングアーム11の前端部が支持されており、スイングアーム11の後端部に後輪3が回転自在に支持されている。ハンドル6の後方には燃料タンク12が設けられており、燃料タンク12の後方に運転者騎乗用のシート13が設けられている。
【0038】
前輪2と後輪3の間では、複数の気筒を有するエンジンE(動力源)がメインフレーム9及びピボットフレーム10に支持された状態で搭載されている。エンジンEには変速装置14が接続されており、この変速装置14から出力される駆動力がチェーン15を介して後輪3に伝達される。エンジンEの吸気ポート(図示せず)にはメインフレーム9の内側に配置されたスロットル装置16が接続されている。スロットル装置16の上流側には燃料タンク12の下方に配置されたエアクリーナ19が接続されている。また、シート13の下方の内部空間には、スロットル装置16や点火装置48(図4参照)やインジェクタ47(図4参照)などを制御するECU17(電子制御ユニット)が収容されている。
【0039】
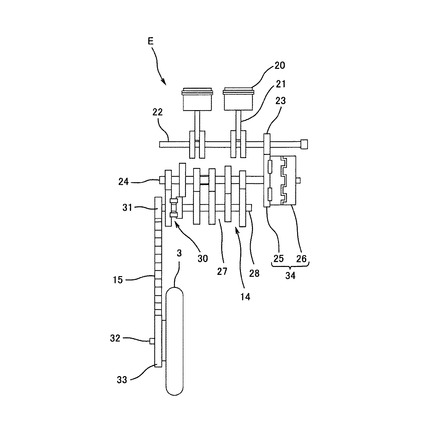
図2は図1に示す自動二輪車1の主に駆動系を説明する模式図である。図2に示すように、エンジンEには、そのピストン20のコンロッド21と接続されたクランク軸22が設けられ、このクランク軸22の端部に第1クラッチギヤ23が設けられている。第1クラッチギヤ23には、変速装置14の入力軸24に回転自在に外嵌された第2クラッチギヤ25が噛合されている。入力軸24の端部には第2クラッチギヤ25と対向するメインクラッチ26が固定されている。メインクラッチ26と第2クラッチギヤ25とでクラッチ34が構成されている。つまり、入力軸24の端部に設けられたメインクラッチ26が第2クラッチギヤ25と接続された状態で、入力軸24がクランク軸22と連動して回転する。入力軸24には歯車列27を介して出力軸28が変速自在に結合されている。歯車列27には、ギヤチェンジを行うための公知のドッグクラッチ30が設けられている。出力軸28の端部には駆動スプロケット31が設けられていると共に、後輪3の車軸32には従動スプロケット33が設けられており、駆動スプロケット31と従動スプロケット33との間にチェーン15が巻き掛けられている。
【0040】
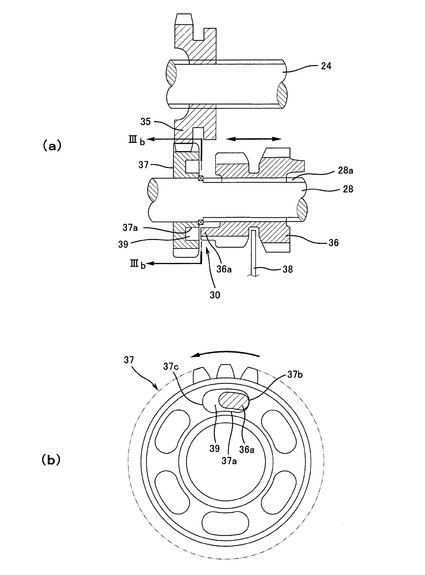
図3(a)は図2に示す駆動系のドッグクラッチ30の断面図、(b)はそのIIIb−IIIb断面図である。図3(a)(b)に示すように、ドッグクラッチ30は、出力軸28の軸線方向に沿って近接/離反可能に対向配置された一対の歯車36,37(動力伝達部材)を備えている。出力軸28の外周面には、軸線方向に溝切りされたスプライン28aが形成され、一方の歯車36はスプライン28aに噛み合った状態で出力軸28に外嵌されている。つまり、一方の歯車36は、出力軸28の軸線方向にスライド自在で且つ出力軸28と一体的に回転する。他方の歯車37は、出力軸28に対して相対回転可能に外嵌されている。
【0041】
一方の歯車36は、その軸方向端面にて他方の歯車37に向けて軸方向に突出した係合凸部36aを有している。他方の歯車37は、係合凸部36aと対向するように形成された係合凹部37aを有している。そして、シフトフォーク38により、一方の歯車36が出力軸28に沿ってスライドされることで、両歯車36,37の軸方向の距離が変更され、係合状態と非係合状態とが切り換えられる。係合凸部36aと係合凹部37aとが互いに係合した部分が本発明で言う係合部分の一例である。
【0042】
また、係合凸部36aと係合凹部37aとは互いに接離可能に遊びをもって係合される。具体的には、係合状態にある係合凸部36aと係合凹部37aとの間には隙間39が形成されており、係合状態にある係合凸部36aと係合凹部37aとは遊びの範囲内で相対回転可能となっている。よって、係合凹部37aの軸回転方向の一方の壁面37bが係合凸部36aに当接した状態で、他方の歯車37が入力軸24の歯車35により回転させられると、一方の歯車36も回転する。このようにして、動力伝達上流側の歯車37から動力伝達下流側の歯車36に回転動力が伝達されるようになっている。なお、以下では、係合凹部37aの軸回転方向の一方の壁面37bを加速側の壁面37bと称し、軸回転方向の他方の壁面37cを減速側の壁面37cと称することとする。
【0043】
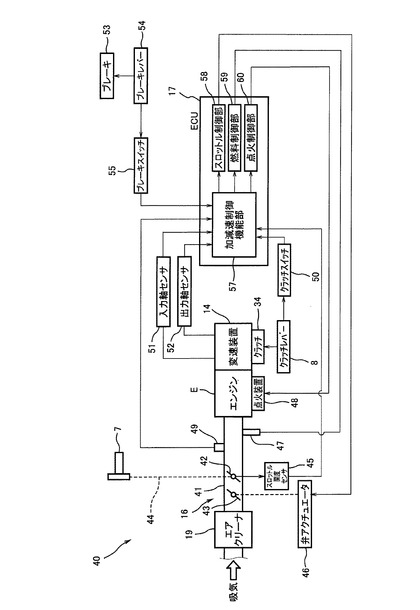
図4は図1に示す自動二輪車1に搭載された車両制御装置40の全体を示すブロック図である。図4に示すように、車両制御装置40は、エアクリーナ19とエンジンEとの間に設けられたスロットル装置16を有している。スロットル装置16は、吸気管41と、吸気管41の下流側に配置されたメインスロットル弁42と、吸気管41の上流側に配置されたサブスロットル弁43とを有している。メインスロットル弁42は、スロットルグリップ7とスロットルワイヤー44を介して接続されており、運転者によるスロットルグリップ7の操作に連動して開閉する。メインスロットル弁42には、メインスロットル弁42の開度を検出するスロットル開度センサ45が設けられている。なお、メインスロットル弁42はスロットルグリップ7に機械的に連動しているため、スロットル開度センサ45は、スロットルグリップ7の操作量を検出していることにもなる。
【0044】
サブスロットル弁43は、ECU17で制御されるモータからなる弁アクチュエータ46に接続されており、弁アクチュエータ46により駆動されて開閉する。また、スロットル装置16には、エンジンEの複数の気筒毎に対応して設けられた複数の吸気通路にそれぞれ燃料を噴射するための複数のインジェクタ47が設けられている。エンジンEには、その複数の気筒内の混合気にそれぞれ点火を行う複数の点火装置48が設けられている。また、吸気管41には、吸気通路を流れる吸気の圧力を検出する吸気圧センサ49が設けられている。
【0045】
エンジンEには、その動力を変速して後輪3に伝達する変速装置14が接続されている。変速装置14には、動力伝達を遮断/接続するためのクラッチ34が設けられている。クラッチ34は、運転者がクラッチレバー8を把持すると動力伝達を遮断し、運転者がクラッチレバー8を離すと動力伝達を接続するよう構成されている。クラッチレバー8には、運転者によりクラッチレバー8が把持されたか否かを検出可能なクラッチスイッチ50(クラッチ遮断判定手段)が設けられている。
【0046】
変速装置14には、入力軸24(図2参照)の回転数を検出可能な入力軸センサ51と、出力軸28(図2参照)の回転数を検出可能な出力軸センサ52とが設けられている。また、自動二輪車1にはブレーキ53が設けられており、運転者によるブレーキレバー54の操作に応じてブレーキ53が作動して前輪2及び/又は後輪3が制動される。ブレーキレバー54には、運転者によりブレーキレバー54が操作されたか否かを検出可能なブレーキスイッチ55(ブレーキ判定手段)が設けられている。
【0047】
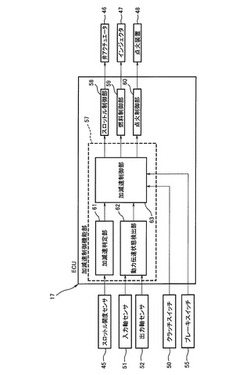
スロットル開度センサ45、クラッチスイッチ50、入力軸センサ51、出力軸センサ52及びブレーキスイッチ55は、それぞれECU17に接続されている。ECU17は、加減速制御機能部57と、スロットル制御部58と、燃料制御部59と、点火制御部60とを有している。加減速制御機能部57は、各センサ45,51,52及び各スイッチ50,55から入力される信号に基づいてエンジンEの出力制御に関する演算を行う。スロットル制御部58は、加減速制御機能部57での演算結果に基づいて弁アクチュエータ46を駆動し、サブスロットル弁43の開度を制御する。燃料制御部59は、加減速制御機能部57での演算結果に基づいてインジェクタ47を制御する。点火制御部60は、加減速制御機能部57での演算結果に基づいて点火装置48を制御する。
【0048】
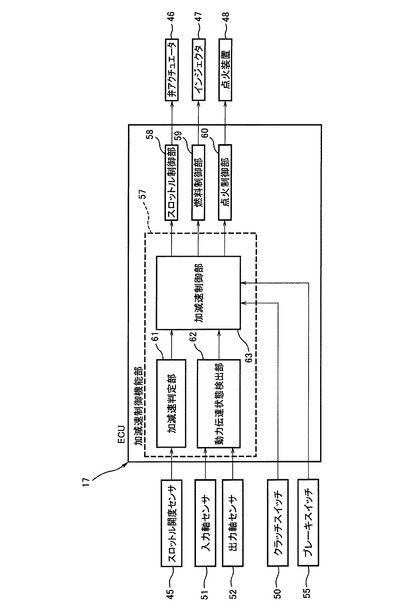
図5は図4に示す車両制御装置40の要部を説明するブロック図である。図5に示すように、ECU17は、加減速制御機能部57、スロットル制御部58、燃料制御部59及び点火制御部60を有している。加減速制御機能部57は、加減速判定部61、動力伝達状態検出部62及び加減速制御部63を有している。加減速判定部61は、スロットル開度センサ45からの情報に応じて、運転者により所定の加減速操作がなされているか否かを判定する。本実施形態では、加減速判定部61は、エンジンEを減速状態から加速状態又は加速状態から減速状態に移行させるための運転者による操作の変化量が所定値より大きい過渡操作がなされているか否かを判定する。より具体的には、加減速判定部61は、スロットル開度センサ45により検出されたスロットル開度THの差分ΔTHが所定の差分閾値ΔTH1より大きくなり、かつ、スロットル開度THが所定の開度閾値TH1よりも大きくなったときに運転者により前記加速操作(過渡操作)がなされていると判定する。なお、本実施形態の差分ΔTHは、スロットル開度センサ45により所定のサンプリング周期で取得された各値のうち時間的に隣接した2つの値の差(時間的に後の値から前の値を引いたもの)であるが、これに限定されず、たとえば時間的に隣接していない2つの値の差であってもよいし、移動平均処理した差分値であってもよい。
【0049】
動力伝達状態検出部62は、入力軸センサ51で得られた入力軸回転数Viから出力軸センサ52で得られた出力軸回転数Voを引き算して求められる相対回転速度V(=Vi−Vo)を動力伝達状態として検出する。また、動力伝達状態検出部62は、その相対回転速度Vを積分して求められる相対回転位置Xも動力伝達状態として検出する(なお、相対回転位置Xは、係合凸部36aが係合凹部37aの空間内における回転方向中央に位置するときをゼロとしてよい)。
【0050】
加減速制御部63は、加減速判定部61により前記加減速操作がなされていると判定された場合には、動力伝達状態検出部62で検出された相対回転速度V及び相対回転位置Xに応じて、係合凸部36aと係合凹部37aとの間の接触速度及び伝達トルクの少なくとも一方が小さくなるように入力軸24又は出力軸28を加減速させる加減速制御を実行する。加減速制御部63は、加減速判定部61により前記加減速操作がなされていると判定されたときに、動力伝達状態検出部62で検出された相対回転速度Vの絶対値が所定の速度閾値V1より大きくなった場合に、加減速制御の実行を許可する。加減速制御部63は、動力伝達状態検出部62により検出された相対回転位置Xの絶対値が所定の位置閾値X1を超えた時点から加減速制御の実行を開始する。加減速制御部63は、加減速制御の実行中において加減速判定部61により前記加減速操作がなされていないと判定されると加減速制御を終了する。
【0051】
本実施形態では、加減速制御部63は、点火装置48によるエンジンEの点火時期を遅角又は進角してエンジン出力を制御することにより、入力軸24を加減速する加減速制御を行う。ここで、加減速制御として点火時期制御を用いたのは、遅角又は進角がなされてからエンジン出力が変化するまでの時間が短く応答性が良いため、本発明のような瞬間的な加減速制御に適しているからである。さらに、加減速制御部63は、クラッチスイッチ50からの情報によりクラッチ34が遮断されたと判定される場合には加減速制御の実行を禁止する。また、加減速制御部63は、ブレーキスイッチ55からの情報によりブレーキ53が作動したと判定される場合にも加減速制御の実行を禁止する。さらに、加減速制御部63は、加減速制御の実行開始から第1所定時間T1が経過すると加減速制御の実行を終了させ、かつ、前記終了後の第2所定時間T2以内は加減速制御の実行を禁止する。
【0052】
次に、車両制御装置40による制御手順について説明する。図6は図4に示す車両制御装置40の減速走行から加速走行への移行時における制御を説明するフローチャートである。図7は図6に示す制御を説明するタイミングチャートである。なお、図7中の回転数に関するグラフでは、入力軸センサ51から得られる入力軸回転数に対して、入力軸24から出力軸28への歯車35,37(図3参照)による減速率を乗じた値を入力軸回転数として図示し、係合凸部36aと係合凹部37aとが相対角変位していないときには入力軸回転数Viと出力軸回転数Voが一致するように表示している。
【0053】
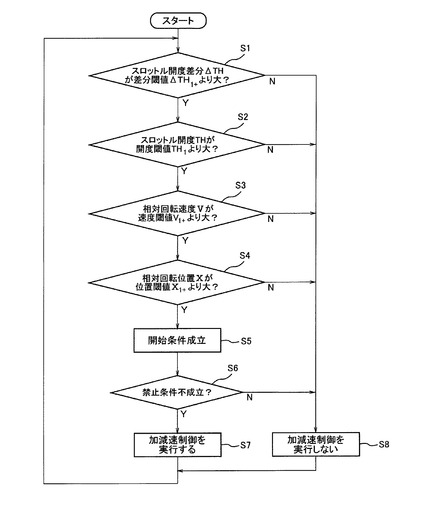
図6及び7に示すように、自動二輪車1の走行中において、まず、スロットル開度の差分ΔTHが正値である差分閾値ΔTH1+よりも大きいか否かが判定される(ステップS1)。ステップS1でNoの場合には、加速操作がなされてないと判断できるため、加減速制御を実行しない(ステップS8)。ステップS1でYesの場合には、スロットル開度THが開度閾値TH1+より大きいか否かが判定される(ステップS2)。ステップS2でNoの場合には、エンジンEがあまり加速していないと判断できるため、加減速制御を実行しない(ステップS8)。
【0054】
ステップS2でYesの場合には、エンジンEを減速状態から加速状態に移行させる加速操作(過渡操作)がなされていると判断され、次いで、相対回転速度Vが正値である速度閾値V1+よりも大きいか否かが判定される(ステップS3)。ステップS3でNoの場合には、係合凸部36aと係合凹部37aとの間で大きな接触ショックが発生するほどの加速状態ではないと判断できるため、加減速制御を実行しない(ステップS8)。このように、相対回転速度Vが大きくてドッグクラッチ30で強い衝突が発生しうるときに加減速制御を実行させるようにしているので、加減速制御が頻繁に実行されることが防止される。
【0055】
ステップS3でYesの場合には、相対回転位置Xが正値である位置閾値X1+よりも大きいか否かを判定する(ステップS4)。ステップS4でNoの場合には、ドッグクラッチ30の係合凸部36aが係合凹部37aの減速側の壁面37cから加速側の壁面37bに十分近づいていないと判断できるため、未だ加減速制御を実行しない(ステップS8)。このように、相対回転位置Xが位置閾値X1+を超えるまでは加減速制御を実行しないので、ドッグクラッチ30での衝突発生時に合わせて加減速制御を開始させることでき、加減速制御が無駄に長く続くことが防止される。
【0056】
ステップS4でYesの場合には、ドッグクラッチ30の係合凸部36aが係合凹部37aの減速側の壁面37cから加速側の壁面37bに十分近づいていると判断できるため、加減速制御の開始条件が成立したと判断する(ステップS5)。しかし本実施形態では、種々の要因から加減速制御を実行しない方がよい場合も想定されるため、次に、加減速制御の実行を禁止する禁止条件が不成立であるか否かを判定する(ステップS6)。
【0057】
禁止条件の一例としては、クラッチ34が遮断状態となっている場合が挙げられる。つまり、クラッチ34が遮断状態であってエンジンEから後輪3への動力伝達自体が行われない場合には、加減速制御を実行しない(ステップS8)。これにより、加減速制御が無駄に実行されることが防止され、クラッチ34が遮断状態から接続状態に戻ったときの加速性能を良好に保つことができる。
【0058】
また、禁止条件の他の例としては、ブレーキ53が作動している場合が挙げられる。つまり、ブレーキ53が作動している場合には、加減速制御を実行しない(ステップS8)。これにより、後輪3のブレーキ時に加減速制御が無駄に実行されることが防止され、ブレーキ動作が解除されたときの加速性能を良好に保つことができる。
【0059】
また、禁止条件の他の例としては、加減速制御の継続時間が第1所定時間T1を超えている場合が挙げられる。つまり、仮に加減速制御が既に実行されていた場合に、その加減速制御の継続時間が第1所定時間T1を超える場合には、加速レスポンスへの影響を抑える必要があると判断して、加減速制御を停止させる(ステップS8)。
【0060】
また、禁止条件の他の例としては、加減速制御の前回終了時から第2所定時間T2が経過していない場合が挙げられる。つまり、加減速制御の前回終了時から第2所定時間T2が経過していない場合には、加速操作時における加減速制御の頻繁な繰り返しを防止する必要があると判断して、加減速制御を実行しない(ステップS8)。
【0061】
そして、前述した禁止条件が不成立である場合には、加減速制御を実行する(ステップS7)。具体的には、図6は減速走行から加速走行に移行する場合であるので、加減速制御として、点火時期を遅角してエンジンEの出力を低下させる制御を実行する。これにより、入力軸24と出力軸28との間の相対回転加速度が低減される。
【0062】
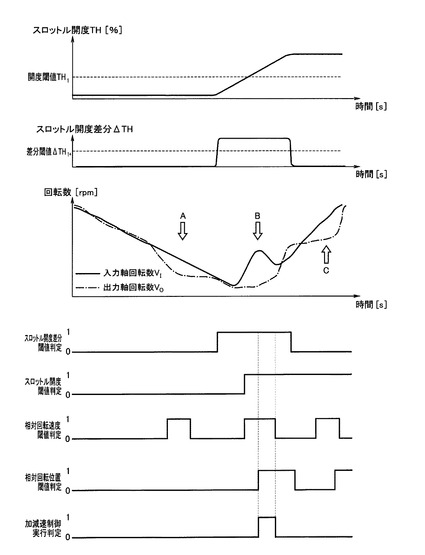
以上に説明した構成によれば、スロットル開度THが開度閾値TH1よりも大きく且つスロットル開度差分ΔTHが差分閾値ΔTH1+よりも大きい加速操作時にエンジン出力を低下させる制御を実行させるようにしたので(図7のB箇所)、減速から加速に移行する際におけるドッグクラッチ30の係合凸部36aと係合凹部37aとの間の衝突による大きなショックが低減され、乗り心地が向上する。さらに、動力伝達上流側の部材が動力伝達下流側の部材を加速側に強く押すことによるスリップの発生も防止されることになり、トラクション性能も向上する。
【0063】
また、減速中においては、入力軸24と出力軸28との間に閾値V1+より大きい相対回転速度Vが発生してもエンジン出力を低下させる制御が実行されないようになる(図7のA箇所)。さらに、減速から加速へ移行してから時間が経ったときにおいても、大きい相対回転速度Vが発生してもエンジン出力を低下させる制御は実行されないようになる(図7のC箇所)。したがって、エンジン出力を低下させる制御が頻繁に実行されることが防止されて、ドライバビリティが向上する。
【0064】
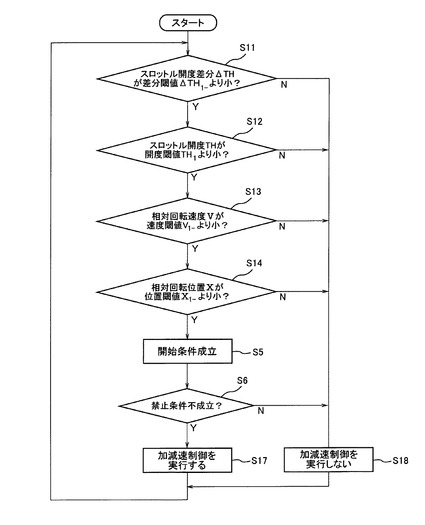
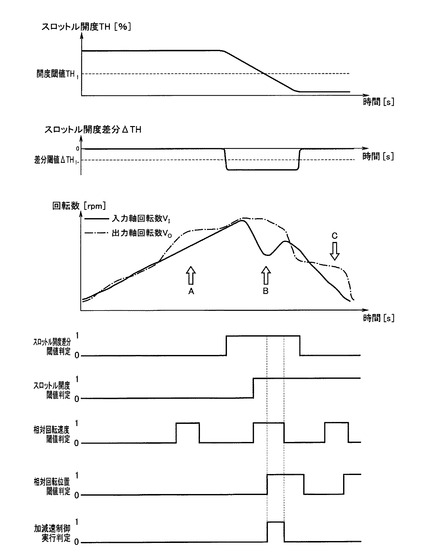
図8は図4に示す車両制御装置40の加速走行から減速走行への移行時における制御を説明するフローチャートである。図9は図8に示す制御を説明するタイミングチャートである。図8及び9に示すように、自動二輪車1の走行中において、まず、スロットル開度の差分ΔTHが負値である差分閾値ΔTH1-よりも小さいか否かが判定される(ステップS11)。ステップS11でNoの場合には、減速操作がなされてないと判断できるため、加減速制御を実行しない(ステップS18)。ステップS1でYesの場合には、スロットル開度THが開度閾値TH1より小さいか否かが判定される(ステップS12)。ステップS12でNoの場合には、エンジンEがあまり減速していないと判断できるため、加減速制御を実行しない(ステップS18)。
【0065】
ステップS12でYesの場合には、エンジンEを加速状態から減速状態に移行させる減速操作(過渡操作)がなされていると判断され、次いで、相対回転速度Vが負値である速度閾値V1-よりも小さいか否かが判定される(ステップS13)。ステップS13でNoの場合には、係合凸部36aと係合凹部37aとの間で大きな接触ショックが発生するほどの減速状態ではないと判断できるため、加減速制御を実行しない(ステップS18)。このように、相対回転速度Vの絶対値が大きくてドッグクラッチ30で強い衝突が発生しうるときに加減速制御を実行させるようにしているので、加減速制御が頻繁に実行されることが防止される。
【0066】
ステップS13でYesの場合には、相対回転位置Xが負値である位置閾値X1-よりも小さいか否かを判定する(ステップS14)。ステップS14でNoの場合には、ドッグクラッチ30の係合凸部36aが係合凹部37aの加速側の壁面37bから減速側の壁面37cに十分近づいていないと判断できるため、未だ加減速制御を実行しない(ステップS18)。このように、相対回転位置Xが位置閾値X1-を下回るまでは加減速制御を実行しないので、ドッグクラッチ30での衝突発生時に合わせて加減速制御を開始させることでき、加減速制御が無駄に長く続くことが防止される。
【0067】
ステップS14でYesの場合には、ドッグクラッチ30の係合凸部36aが係合凹部37aの加速側の壁面37bから減速側の壁面37cに十分近づいていると判断できるため、加減速制御の開始条件が成立したと判断する(ステップS5)。次に、加減速制御の実行を禁止する禁止条件が不成立であるか否かを判定する(ステップS6)。この禁止条件は前述した通りであるので、詳細な説明は省略する。そして、禁止条件が不成立である場合には、加減速制御を実行する(ステップS17)。具体的には、図8は加速走行から減速走行に移行する場合であるので、加減速制御として、点火時期を進角してエンジンEの出力を増加させる制御を実行する。これにより、入力軸24と出力軸28との間の相対回転加速度が低減される。
【0068】
以上に説明した構成によれば、スロットル開度THが開度閾値TH1よりも小さく且つスロットル開度差分ΔTHが差分閾値ΔTH1-よりも小さい減速操作時にエンジン出力を増加させる制御を実行させるようにしたので(図7のB箇所)、加速から減速に移行する際におけるドッグクラッチ30の係合凸部36aと係合凹部37aとの間の衝突による大きなショックが低減され、乗り心地が向上する。
【0069】
また、加速中においては、入力軸24と出力軸28との間に閾値V1-より小さい相対回転速度Vが発生してもエンジン出力を増加させる制御が実行されないようになる(図9のA箇所)。さらに、加速から減速へ移行してから時間が経ったときにおいても、相対回転速度Vの絶対値が大きくなってもエンジン出力を増加させる制御は実行されないようになる(図9のC箇所)。したがって、エンジン出力を増加させる制御が頻繁に実行されることが防止されて、ドライバビリティが向上する。
【0070】
(第2実施形態)
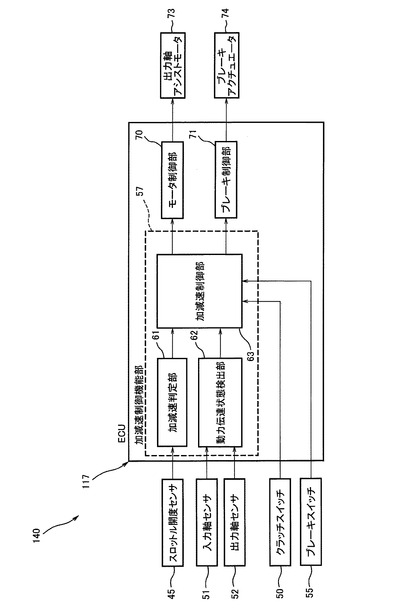
図10は本発明の第2実施形態に係る車両制御装置140の要部を説明するブロック図である。なお、第1実施形態と共通する構成については同一符号を付して説明を省略する。図10に示すように、本実施形態の車両制御装置140は、出力軸28(図2参照)を駆動する出力軸アシストモータ73と、後輪3(図1参照)のブレーキを作動させるブレーキアクチュエータ74とを備えている。車両制御装置140のECU117は、出力軸アシストモータ73を制御するモータ制御部70と、ブレーキアクチュエータ74を制御するブレーキ制御部71を有している。ECU117の加減速制御部63は、出力軸アシストモータ73又はブレーキアクチュエータ74を駆動して出力軸28を加減速することにより加減速制御を行う。
【0071】
以上の構成によれば、図6のステップS7において、遅角制御の代わりに、出力軸アシストモータ73を駆動して出力軸28を加速させる制御を行うことにより、減速から加速に移行する際における入力軸24と出力軸28との間の相対回転加速度が低減する。よって、減速から加速に移行する際におけるドッグクラッチ30の係合凸部36aと係合凹部37aとの間の衝突による大きなショックが低減され、乗り心地が向上する。
【0072】
また、図8のステップS17において、進角制御の代わりに、ブレーキアクチュエータ74を駆動して出力軸28を減速させる制御を行うことにより、加速から減速に移行する際における入力軸24と出力軸28との間の相対回転加速度が低減する。よって、加速から減速に移行する際におけるドッグクラッチ30の係合凸部36aと係合凹部37aとの間の衝突による大きなショックが低減され、乗り心地が向上する。
【0073】
(第3実施形態)
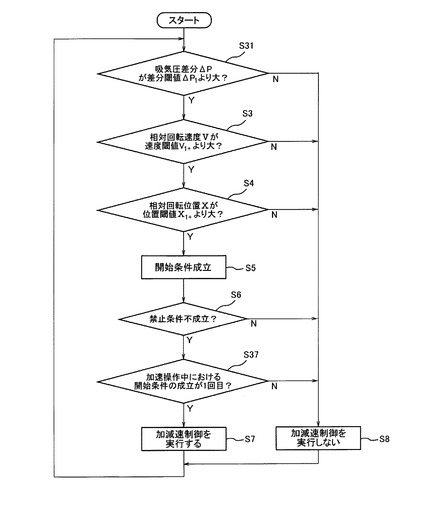
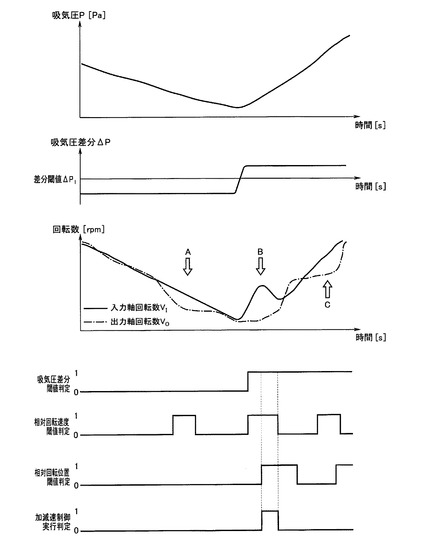
図11は本発明の第3実施形態に係る車両制御装置の減速走行から加速走行への移行時における制御を説明するフローチャートである。図12は図11に示す制御を説明するタイミングチャートである。なお、第1実施形態と共通する構成については同一符号を付して説明を省略する。本実施形態では、スロットル開度の代わりに吸気圧を利用して加減速判定を行っている。図11及び12に示すように、自動二輪車1の走行中において、吸気圧センサ49で検出された吸気圧の差分ΔPが正値である差分閾値ΔP1+よりも大きいか否かが判定される(ステップS31)。この際、吸気圧差分ΔPは、エンジンEの各気筒の吸気圧の平均値の差分でもよいし、特定の気筒の1サイクル毎の吸気圧のボトムピーク値の差分でもよい。
【0074】
ステップS31でNoの場合には、加速操作がなされてないと判断できるため、加減速制御を実行しない(ステップS8)。ステップS31でYesの場合には、ステップS3に進む。なお、ステップS3からステップS6は第1実施形態と同様であるため詳細な説明を省略する。そして、ステップS6でYesの場合には、加速操作中(ステップS1でのYes判定が継続している間)における開始条件の成立が1回目であるか否かが判定される(ステップS37)。
【0075】
ステップS37でNoの場合、即ち、加速操作中において開始条件が1回成立した後に開始条件が不成立となり、その後さらに開始条件が成立した場合には、減速から加速へ移行してから時間が経ったときであると判断して(図12のC箇所)、加減速制御を実行しない(ステップS8)。ステップS37でYesの場合には、減速から加速へ移行する過渡操作時であると判断して(図12のB箇所)、加減速制御を実行する(ステップS7)。
【0076】
なお、前述した各実施形態は一例であり、以下に述べるような変更を適宜行ってもよい。例えば、前記実施形態では自動二輪車1を例示しているが、動力源から駆動輪への動力伝達経路中の動力伝達部材が互いに遊びをもって係合されてなる車両であれば他の乗り物であってもよい。また前記実施形態では、動力源としてエンジンEを搭載した車両を例示しているが、エンジンの代わりにモータを搭載した電気自動車、またはモータとエンジンの両方を搭載したハイブリッド車であってもよい。その場合には、入力軸24を減速させる制御としてモータを減速させるように制御するとよい。
【0077】
また前記実施形態では、加減速判定部61はスロットル開度センサ45からの情報に基づいて加減速判定を行っているが、運転者が直接操作する入力部材であるスロットルグリップ7の開度を検出するグリップ開度センサからの情報に基づいて加減速判定を行ってもよい。
【0078】
また前記実施形態では、エンジン出力を低下させて入力軸24を加減速する加減速制御として遅角/進角制御が例示されているが、他の方法を用いてもよい。例えば、エンジンEの複数の気筒のうち一部の気筒の燃焼行程で点火しないことでエンジン出力を低下させてもよいし、インジェクタ47が噴射される燃料量を低減又はゼロにすることでエンジン出力を低下させてもよいし、スロットル弁で制御される吸気量を低減することでエンジン出力を低下させてもよい。
【0079】
また前記実施形態では、ドッグクラッチ30の動力伝達上流側にある入力軸として変速装置14の入力軸24が例示されているが、クランク軸22をドッグクラッチ30の動力伝達上流側にある入力軸として用いてもよい。その場合には、入力軸センサとしてクランク軸センサを用いるとよい。
【0080】
また前記実施形態では、クラッチ遮断判定手段としてクラッチスイッチ50を例示しているが、入力軸センサ51で得られた入力軸回転数Viが所定の閾値Vi1以上であり、出力軸センサ52で得られた出力軸回転数Voが所定の閾値Vo1以下であり、かつ、Vi1がVo1よりも所定値以上大きい場合に、クラッチ34が遮断状態になったと判定するようにしてもよい。
【産業上の利用可能性】
【0081】
以上のように、本発明に係る車両制御装置は、運転者の違和感が低減し、ドライバビリティが向上する優れた効果を有し、この効果の意義を発揮できる自動二輪車等の車両に広く適用すると有益である。
【符号の説明】
【0082】
1 自動二輪車(車両)
24 入力軸
28 出力軸
30 ドッグクラッチ
34 クラッチ
36a 係合凸部
37a 係合凹部
40 車両制御装置
42 メインスロットル弁
45 スロットル開度センサ
50 クラッチスイッチ(クラッチ遮断判定手段)
51 入力軸センサ
52 出力軸センサ
53 ブレーキ
55 ブレーキスイッチ(ブレーキ判定手段)
58 スロットル制御部
61 加減速判定部(加減速判定手段)
62 動力伝達状態検出部(動力伝達状態検出手段)
63 加減速制御部(加減速制御手段)
【技術分野】
【0001】
本発明は、動力源から駆動輪への動力伝達経路中の動力伝達部材が互いに遊びをもって係合されてなる車両の制御装置に関するものである。
【背景技術】
【0002】
自動二輪車等の車両では、エンジンから駆動輪までの動力伝達経路中に、ギヤ、ドッグクラッチ、チェーン、スプロケット、スプラインなどの種々の動力伝達部材が存在し、これらの動力伝達部材は、動力伝達経路上で隣接する動力伝達部材と遊びをもって係合している。このような車両では、エンジン回転数の増減やエンジンブレーキ等によって、動力伝達経路上で遊びを境界とした上流側の動力伝達部材と下流側の動力伝達部材とで回転速度差が生じ、これらの動力伝達部材が遊びの範囲内で一時的に離れ、反対側の面で再接触する。このときの接触速度や伝達トルクが大きいと、そのショックが運転者に伝わり、運転者に不快感を与える。このような観点から、動力伝達経路における入力軸と出力軸との間の相対回転位置及び/又は相対回転速度に基づいて入力軸及び/又は出力軸を加減速する技術が提案されている(例えば、特許文献1参照)。この技術によれば、エンジンから駆動輪への動力伝達経路中の隣接する動力伝達部材同士が遊びの範囲内で相対変位して再接触するときの接触速度及び/又は伝達トルクを低減させることができ、接触ショックを和らげることが可能となる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−321088号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、駆動輪に対する地面からの負荷が瞬間的に増大した場合等には、入力軸と出力軸との間に相対回転速度が発生することとなる。例えば、車両が荒い路面の走行している時などには、駆動輪に対する地面からの負荷が繰り返し変動し、入力軸と出力軸との間の相対回転速度が周期的に発生することとなる。そのように相対回転速度が発生するたびに接触ショックを緩和するための加減速制御が実行されてしまうと、頻繁に瞬間的な加減速が生じるため、運転者に違和感を生じさせてドライバビリティが低下することとなる。
【0005】
そこで本発明は、運転者の違和感を低減してドライバビリティを向上させることを目的としている。
【課題を解決するための手段】
【0006】
本発明は前記事情に鑑みてなされたものであり、本発明に係る車両制御装置は、動力源から駆動輪への動力伝達経路中の動力伝達部材が互いに遊びをもって係合されてなる車両の制御装置であって、運転者により所定の加減速操作がなされているか否かを判定する加減速判定手段と、前記動力伝達経路のうち遊びのある係合部分に対して動力伝達上流側にある入力軸と、前記係合部分に対して動力伝達下流側にある出力軸との相対回転位置及び相対回転速度の少なくとも一方の値を検出する動力伝達状態検出手段と、前記加減速判定手段により前記加減速操作がなされていると判定された場合には、前記動力伝達状態検出手段により検出された値に応じて、前記動力伝達部材間の接触速度及び伝達トルクの少なくとも一方が小さくなるように前記入力軸又は前記出力軸を加減速させる加減速制御を実行する加減速制御手段とを備えている。
【0007】
前記構成によれば、動力伝達部材間の衝突ショックが大きくなる加減速操作時に、入力軸又は出力軸を加減速して動力伝達部材間の接触速度及び/又は伝達トルクが小さくなるようにしたため、運転者に伝わるショックを抑制できるとともに、入力軸と出力軸との間に相対回転速度が発生するたびに加減速制御が実行されて頻繁に瞬間的な減速が生じるのを防止できる。よって、運転者の違和感が低減し、ドライバビリティが向上する。
【0008】
前記加減速判定手段は、スロットル開度センサにより検出されたスロットル開度に応じて所定の加減速操作がなされているか否かを判定する構成としてもよいし、吸気圧センサにより検出された吸気圧に応じて所定の加減速操作がなされているか否かを判定する構成としてもよい。そうすれば、既存の部品を利用して加減速操作を容易に検出することができる。
【0009】
前記加減速判定手段は、前記動力源を減速状態から加速状態又は加速状態から減速状態に移行させるための運転者による操作の変化量が所定値より大きい過渡操作を前記加減速操作であると判定する構成としてもよい。
【0010】
車両が減速走行から加速走行又は加速走行から減速走行に移行する際には、前記遊びの範囲内において入力側の動力伝達部材が出力側の動力伝達部材の一方面から離れて他方面に衝突するよう動作する。そして、当該動作時には、動力伝達部材間の相対運動距離は最大となり且つ相対速度も大きくなることから、動力伝達部材間の衝突によるショックが特に大きくなって乗り心地を低下させうる。しかし前記構成によれば、当該動作時において動力伝達部材間の接触速度及び伝達トルクの少なくとも一方が小さくなるように入力軸又は出力軸を加減速させるようにしたので、加減速制御が頻繁に実行されることを防止しながらも好適に乗り心地を向上させることができる。
【0011】
前記動力源となるエンジンへの吸気量を調節するスロットル弁の開度を検出するスロットル開度センサを備え、前記加減速判定手段は、前記スロットル開度センサにより検出されたスロットル開度の差分が所定の正値の差分閾値より大きくなり、かつ、前記スロットル開度が所定の開度閾値よりも大きくなったときに、前記動力源を減速状態から加速状態に移行させる前記過渡操作がなされていると判定する構成としてもよい。
【0012】
前記構成によれば、車両が減速走行から加速走行に移行して動力伝達部材間で強い衝突が発生するときを簡素な構成で判断することができる。
【0013】
前記動力源となるエンジンへの吸気量を調節するスロットル弁の開度を検出するスロットル開度センサを備え、前記加減速判定手段は、前記スロットル開度センサにより検出されたスロットル開度の差分が所定の負値の差分閾値より小さくなり、かつ、前記スロットル開度が所定の開度閾値よりも小さくなったときに、前記動力源を加速状態から減速状態に移行させる前記過渡操作がなされていると判定する構成としてもよい。
【0014】
前記構成によれば、車両が加速走行から減速走行に移行して動力伝達部材間で強い衝突が発生するときを簡素な構成で判断することができる。
【0015】
前記加減速制御手段は、前記動力伝達状態検出手段で検出された前記相対回転速度の絶対値が所定の速度閾値より大きくなった場合に、前記加減速制御の実行を許可する構成としてもよい。
【0016】
前記構成によれば、相対回転速度が大きく動力伝達部材間で強い衝突が発生しうるときに加減速制御を行うようにしたので、乗り心地を向上させながらも加減速制御が頻繁に実行されることを防止できる。
【0017】
前記加減速制御手段は、前記加減速判定手段により前記加速操作がなされていると判定された場合には、前記動力伝達状態検出手段により検出された前記相対回転位置の絶対値が所定の位置閾値を超えた時点から前記加減速制御を開始する構成としてもよい。
【0018】
前記構成によれば、相対回転位置の絶対値が所定の位置閾値を超えるまで加減速制御は開始しないので、動力伝達部材間の衝突時に合わせて加減速制御を行うことができ、加減速制御が無駄に長く続くことを好適に防止することができる。
【0019】
前記加減速制御手段は、前記加減速制御の実行中において前記加減速判定手段により前記加減速操作がなされていないと判定されると前記加減速制御を終了する構成としてもよい。
【0020】
前記構成によれば、動力伝達部材間で強い衝突が発生しないときに、加減速制御が実行され続けてしまうことが防止され、ドライバビリティが更に向上する。
【0021】
前記動力源となるエンジンへの吸気量を調節するスロットル弁の開度を検出するスロットル開度センサを備え、前記加減速制御手段は、前記加減速制御の実行中において前記スロットル開度センサにより検出されたスロットル開度の差分の絶対値が所定の差分閾値以下となると前記加減速制御を終了する構成としてもよい。
【0022】
前記構成によれば、運転者による加減速操作の変化が小さいときに、過剰に加減速されることが防止され、運転フィーリングを向上させることができる。
【0023】
前記動力源となるエンジンの吸気圧を検出する吸気圧センサを備え、前記加減速制御手段は、前記加減速制御の実行中において前記吸気圧センサにより検出された吸気圧の差分の絶対値が所定の差分閾値以下となると前記加減速制御を終了する構成としてもよい。
【0024】
前記構成によれば、運転者による加減速操作の変化が小さいときに、過剰に加減速されることが防止され、運転フィーリングを向上させることができる。
【0025】
前記加減速制御手段は、前記加減速制御の実行開始から第1所定時間が経過すると前記加減速制御の実行を終了させる構成としてもよい。
【0026】
前記構成によれば、加減速制御が無駄に長く続くことが防止され、運転フィーリングを向上することができる。
【0027】
前記加減速制御手段は、前記加減速制御の終了後の第2所定時間内は前記加減速制御の実行を禁止する構成としてもよい。
【0028】
前記構成によれば、加減速制御が繰り返し頻繁に実行されることが防止され、運転フィーリングを向上することができる。
【0029】
前記動力伝達経路中に設けられたクラッチが遮断されたか否かを判定する前記クラッチ遮断判定手段を備え、前記加減速制御手段は、前記クラッチ遮断判定手段により前記クラッチが遮断されたと判定された場合には、前記加減速制御の実行を禁止する構成としてもよい。
【0030】
前記構成によれば、動力源から駆動輪への動力伝達が行われないクラッチ遮断時において、加減速制御が無駄に実行されることが防止される。よって、クラッチが遮断状態から接続状態に戻ったときの運転性能を良好に保つことができる。
【0031】
前記駆動輪のブレーキが作動したか否かを判定するブレーキ判定手段を備え、前記加減速制御手段は、前記ブレーキ判定手段により前記ブレーキが作動したと判定された場合には、前記加減速制御の実行を禁止する構成としてもよい。
【0032】
前記構成によれば、駆動輪のブレーキ時に加減速制御が無駄に実行されることが防止され、ブレーキが解除されたときの運転性能を良好に保つことができる。
【発明の効果】
【0033】
以上の説明から明らかなように、本発明によれば、運転者の違和感が低減し、ドライバビリティが向上する。
【図面の簡単な説明】
【0034】
【図1】本発明の第1実施形態に係る自動二輪車の左側面図である。
【図2】図1に示す自動二輪車の主に駆動系を説明する模式図である。
【図3】(a)は図2に示す駆動系のドッグクラッチの断面図、(b)はそのIIIb−IIIb断面図である。
【図4】図1に示す自動二輪車に搭載された車両制御装置の全体を示すブロック図である。
【図5】図4に示す車両制御装置の要部を説明するブロック図である。
【図6】図4に示す車両制御装置の減速走行から加速走行への移行時における制御を説明するフローチャートである。
【図7】図6に示す制御を説明するタイミングチャートである。
【図8】図4に示す車両制御装置の加速走行から減速走行への移行時における制御を説明するフローチャートである。
【図9】図8に示す制御を説明するタイミングチャートである。
【図10】本発明の第2実施形態に係る車両制御装置の要部を説明するブロック図である。
【図11】本発明の第3実施形態に係る車両制御装置の減速走行から加速走行への移行時における制御を説明するフローチャートである。
【図12】図11に示す制御を説明するタイミングチャートである。
【発明を実施するための形態】
【0035】
以下、本発明に係る実施形態を図面を参照して説明する。なお、以下の説明で用いる方向の概念は、自動二輪車に騎乗した運転者から見た方向を基準とする。
【0036】
(第1実施形態)
図1は本発明の第1実施形態に係る自動二輪車1の左側面図である。図1に示すように、自動二輪車1(車両)は、従動輪である前輪2と、駆動輪である後輪3とを備えている。前輪2は略上下方向に延びるフロントフォーク4の下端部にて回転自在に支持されており、フロントフォーク4はブラケット(図示せず)を介してステアリング軸(図示せず)に支持されている。該ステアリング軸はヘッドパイプ5によって回転自在に支持されている。該ブラケットには左右へ延びるバー型のハンドル6が取り付けられている。ハンドル6には、運転者の右手により把持されるスロットルグリップ7(図4参照)が設けられており、手首のひねりによりスロットルグリップ7を回転させることで後述するスロットル装置16が操作される。ハンドル6には、運転者の左手により把持されるグリップの前方にクラッチレバー8が設けられている。
【0037】
ヘッドパイプ5からは左右一対のメインフレーム9が若干下方に傾斜しながら後方へ延びており、メインフレーム9の後部に左右一対のピボットフレーム10が接続されている。ピボットフレーム10には略前後方向に延びるスイングアーム11の前端部が支持されており、スイングアーム11の後端部に後輪3が回転自在に支持されている。ハンドル6の後方には燃料タンク12が設けられており、燃料タンク12の後方に運転者騎乗用のシート13が設けられている。
【0038】
前輪2と後輪3の間では、複数の気筒を有するエンジンE(動力源)がメインフレーム9及びピボットフレーム10に支持された状態で搭載されている。エンジンEには変速装置14が接続されており、この変速装置14から出力される駆動力がチェーン15を介して後輪3に伝達される。エンジンEの吸気ポート(図示せず)にはメインフレーム9の内側に配置されたスロットル装置16が接続されている。スロットル装置16の上流側には燃料タンク12の下方に配置されたエアクリーナ19が接続されている。また、シート13の下方の内部空間には、スロットル装置16や点火装置48(図4参照)やインジェクタ47(図4参照)などを制御するECU17(電子制御ユニット)が収容されている。
【0039】
図2は図1に示す自動二輪車1の主に駆動系を説明する模式図である。図2に示すように、エンジンEには、そのピストン20のコンロッド21と接続されたクランク軸22が設けられ、このクランク軸22の端部に第1クラッチギヤ23が設けられている。第1クラッチギヤ23には、変速装置14の入力軸24に回転自在に外嵌された第2クラッチギヤ25が噛合されている。入力軸24の端部には第2クラッチギヤ25と対向するメインクラッチ26が固定されている。メインクラッチ26と第2クラッチギヤ25とでクラッチ34が構成されている。つまり、入力軸24の端部に設けられたメインクラッチ26が第2クラッチギヤ25と接続された状態で、入力軸24がクランク軸22と連動して回転する。入力軸24には歯車列27を介して出力軸28が変速自在に結合されている。歯車列27には、ギヤチェンジを行うための公知のドッグクラッチ30が設けられている。出力軸28の端部には駆動スプロケット31が設けられていると共に、後輪3の車軸32には従動スプロケット33が設けられており、駆動スプロケット31と従動スプロケット33との間にチェーン15が巻き掛けられている。
【0040】
図3(a)は図2に示す駆動系のドッグクラッチ30の断面図、(b)はそのIIIb−IIIb断面図である。図3(a)(b)に示すように、ドッグクラッチ30は、出力軸28の軸線方向に沿って近接/離反可能に対向配置された一対の歯車36,37(動力伝達部材)を備えている。出力軸28の外周面には、軸線方向に溝切りされたスプライン28aが形成され、一方の歯車36はスプライン28aに噛み合った状態で出力軸28に外嵌されている。つまり、一方の歯車36は、出力軸28の軸線方向にスライド自在で且つ出力軸28と一体的に回転する。他方の歯車37は、出力軸28に対して相対回転可能に外嵌されている。
【0041】
一方の歯車36は、その軸方向端面にて他方の歯車37に向けて軸方向に突出した係合凸部36aを有している。他方の歯車37は、係合凸部36aと対向するように形成された係合凹部37aを有している。そして、シフトフォーク38により、一方の歯車36が出力軸28に沿ってスライドされることで、両歯車36,37の軸方向の距離が変更され、係合状態と非係合状態とが切り換えられる。係合凸部36aと係合凹部37aとが互いに係合した部分が本発明で言う係合部分の一例である。
【0042】
また、係合凸部36aと係合凹部37aとは互いに接離可能に遊びをもって係合される。具体的には、係合状態にある係合凸部36aと係合凹部37aとの間には隙間39が形成されており、係合状態にある係合凸部36aと係合凹部37aとは遊びの範囲内で相対回転可能となっている。よって、係合凹部37aの軸回転方向の一方の壁面37bが係合凸部36aに当接した状態で、他方の歯車37が入力軸24の歯車35により回転させられると、一方の歯車36も回転する。このようにして、動力伝達上流側の歯車37から動力伝達下流側の歯車36に回転動力が伝達されるようになっている。なお、以下では、係合凹部37aの軸回転方向の一方の壁面37bを加速側の壁面37bと称し、軸回転方向の他方の壁面37cを減速側の壁面37cと称することとする。
【0043】
図4は図1に示す自動二輪車1に搭載された車両制御装置40の全体を示すブロック図である。図4に示すように、車両制御装置40は、エアクリーナ19とエンジンEとの間に設けられたスロットル装置16を有している。スロットル装置16は、吸気管41と、吸気管41の下流側に配置されたメインスロットル弁42と、吸気管41の上流側に配置されたサブスロットル弁43とを有している。メインスロットル弁42は、スロットルグリップ7とスロットルワイヤー44を介して接続されており、運転者によるスロットルグリップ7の操作に連動して開閉する。メインスロットル弁42には、メインスロットル弁42の開度を検出するスロットル開度センサ45が設けられている。なお、メインスロットル弁42はスロットルグリップ7に機械的に連動しているため、スロットル開度センサ45は、スロットルグリップ7の操作量を検出していることにもなる。
【0044】
サブスロットル弁43は、ECU17で制御されるモータからなる弁アクチュエータ46に接続されており、弁アクチュエータ46により駆動されて開閉する。また、スロットル装置16には、エンジンEの複数の気筒毎に対応して設けられた複数の吸気通路にそれぞれ燃料を噴射するための複数のインジェクタ47が設けられている。エンジンEには、その複数の気筒内の混合気にそれぞれ点火を行う複数の点火装置48が設けられている。また、吸気管41には、吸気通路を流れる吸気の圧力を検出する吸気圧センサ49が設けられている。
【0045】
エンジンEには、その動力を変速して後輪3に伝達する変速装置14が接続されている。変速装置14には、動力伝達を遮断/接続するためのクラッチ34が設けられている。クラッチ34は、運転者がクラッチレバー8を把持すると動力伝達を遮断し、運転者がクラッチレバー8を離すと動力伝達を接続するよう構成されている。クラッチレバー8には、運転者によりクラッチレバー8が把持されたか否かを検出可能なクラッチスイッチ50(クラッチ遮断判定手段)が設けられている。
【0046】
変速装置14には、入力軸24(図2参照)の回転数を検出可能な入力軸センサ51と、出力軸28(図2参照)の回転数を検出可能な出力軸センサ52とが設けられている。また、自動二輪車1にはブレーキ53が設けられており、運転者によるブレーキレバー54の操作に応じてブレーキ53が作動して前輪2及び/又は後輪3が制動される。ブレーキレバー54には、運転者によりブレーキレバー54が操作されたか否かを検出可能なブレーキスイッチ55(ブレーキ判定手段)が設けられている。
【0047】
スロットル開度センサ45、クラッチスイッチ50、入力軸センサ51、出力軸センサ52及びブレーキスイッチ55は、それぞれECU17に接続されている。ECU17は、加減速制御機能部57と、スロットル制御部58と、燃料制御部59と、点火制御部60とを有している。加減速制御機能部57は、各センサ45,51,52及び各スイッチ50,55から入力される信号に基づいてエンジンEの出力制御に関する演算を行う。スロットル制御部58は、加減速制御機能部57での演算結果に基づいて弁アクチュエータ46を駆動し、サブスロットル弁43の開度を制御する。燃料制御部59は、加減速制御機能部57での演算結果に基づいてインジェクタ47を制御する。点火制御部60は、加減速制御機能部57での演算結果に基づいて点火装置48を制御する。
【0048】
図5は図4に示す車両制御装置40の要部を説明するブロック図である。図5に示すように、ECU17は、加減速制御機能部57、スロットル制御部58、燃料制御部59及び点火制御部60を有している。加減速制御機能部57は、加減速判定部61、動力伝達状態検出部62及び加減速制御部63を有している。加減速判定部61は、スロットル開度センサ45からの情報に応じて、運転者により所定の加減速操作がなされているか否かを判定する。本実施形態では、加減速判定部61は、エンジンEを減速状態から加速状態又は加速状態から減速状態に移行させるための運転者による操作の変化量が所定値より大きい過渡操作がなされているか否かを判定する。より具体的には、加減速判定部61は、スロットル開度センサ45により検出されたスロットル開度THの差分ΔTHが所定の差分閾値ΔTH1より大きくなり、かつ、スロットル開度THが所定の開度閾値TH1よりも大きくなったときに運転者により前記加速操作(過渡操作)がなされていると判定する。なお、本実施形態の差分ΔTHは、スロットル開度センサ45により所定のサンプリング周期で取得された各値のうち時間的に隣接した2つの値の差(時間的に後の値から前の値を引いたもの)であるが、これに限定されず、たとえば時間的に隣接していない2つの値の差であってもよいし、移動平均処理した差分値であってもよい。
【0049】
動力伝達状態検出部62は、入力軸センサ51で得られた入力軸回転数Viから出力軸センサ52で得られた出力軸回転数Voを引き算して求められる相対回転速度V(=Vi−Vo)を動力伝達状態として検出する。また、動力伝達状態検出部62は、その相対回転速度Vを積分して求められる相対回転位置Xも動力伝達状態として検出する(なお、相対回転位置Xは、係合凸部36aが係合凹部37aの空間内における回転方向中央に位置するときをゼロとしてよい)。
【0050】
加減速制御部63は、加減速判定部61により前記加減速操作がなされていると判定された場合には、動力伝達状態検出部62で検出された相対回転速度V及び相対回転位置Xに応じて、係合凸部36aと係合凹部37aとの間の接触速度及び伝達トルクの少なくとも一方が小さくなるように入力軸24又は出力軸28を加減速させる加減速制御を実行する。加減速制御部63は、加減速判定部61により前記加減速操作がなされていると判定されたときに、動力伝達状態検出部62で検出された相対回転速度Vの絶対値が所定の速度閾値V1より大きくなった場合に、加減速制御の実行を許可する。加減速制御部63は、動力伝達状態検出部62により検出された相対回転位置Xの絶対値が所定の位置閾値X1を超えた時点から加減速制御の実行を開始する。加減速制御部63は、加減速制御の実行中において加減速判定部61により前記加減速操作がなされていないと判定されると加減速制御を終了する。
【0051】
本実施形態では、加減速制御部63は、点火装置48によるエンジンEの点火時期を遅角又は進角してエンジン出力を制御することにより、入力軸24を加減速する加減速制御を行う。ここで、加減速制御として点火時期制御を用いたのは、遅角又は進角がなされてからエンジン出力が変化するまでの時間が短く応答性が良いため、本発明のような瞬間的な加減速制御に適しているからである。さらに、加減速制御部63は、クラッチスイッチ50からの情報によりクラッチ34が遮断されたと判定される場合には加減速制御の実行を禁止する。また、加減速制御部63は、ブレーキスイッチ55からの情報によりブレーキ53が作動したと判定される場合にも加減速制御の実行を禁止する。さらに、加減速制御部63は、加減速制御の実行開始から第1所定時間T1が経過すると加減速制御の実行を終了させ、かつ、前記終了後の第2所定時間T2以内は加減速制御の実行を禁止する。
【0052】
次に、車両制御装置40による制御手順について説明する。図6は図4に示す車両制御装置40の減速走行から加速走行への移行時における制御を説明するフローチャートである。図7は図6に示す制御を説明するタイミングチャートである。なお、図7中の回転数に関するグラフでは、入力軸センサ51から得られる入力軸回転数に対して、入力軸24から出力軸28への歯車35,37(図3参照)による減速率を乗じた値を入力軸回転数として図示し、係合凸部36aと係合凹部37aとが相対角変位していないときには入力軸回転数Viと出力軸回転数Voが一致するように表示している。
【0053】
図6及び7に示すように、自動二輪車1の走行中において、まず、スロットル開度の差分ΔTHが正値である差分閾値ΔTH1+よりも大きいか否かが判定される(ステップS1)。ステップS1でNoの場合には、加速操作がなされてないと判断できるため、加減速制御を実行しない(ステップS8)。ステップS1でYesの場合には、スロットル開度THが開度閾値TH1+より大きいか否かが判定される(ステップS2)。ステップS2でNoの場合には、エンジンEがあまり加速していないと判断できるため、加減速制御を実行しない(ステップS8)。
【0054】
ステップS2でYesの場合には、エンジンEを減速状態から加速状態に移行させる加速操作(過渡操作)がなされていると判断され、次いで、相対回転速度Vが正値である速度閾値V1+よりも大きいか否かが判定される(ステップS3)。ステップS3でNoの場合には、係合凸部36aと係合凹部37aとの間で大きな接触ショックが発生するほどの加速状態ではないと判断できるため、加減速制御を実行しない(ステップS8)。このように、相対回転速度Vが大きくてドッグクラッチ30で強い衝突が発生しうるときに加減速制御を実行させるようにしているので、加減速制御が頻繁に実行されることが防止される。
【0055】
ステップS3でYesの場合には、相対回転位置Xが正値である位置閾値X1+よりも大きいか否かを判定する(ステップS4)。ステップS4でNoの場合には、ドッグクラッチ30の係合凸部36aが係合凹部37aの減速側の壁面37cから加速側の壁面37bに十分近づいていないと判断できるため、未だ加減速制御を実行しない(ステップS8)。このように、相対回転位置Xが位置閾値X1+を超えるまでは加減速制御を実行しないので、ドッグクラッチ30での衝突発生時に合わせて加減速制御を開始させることでき、加減速制御が無駄に長く続くことが防止される。
【0056】
ステップS4でYesの場合には、ドッグクラッチ30の係合凸部36aが係合凹部37aの減速側の壁面37cから加速側の壁面37bに十分近づいていると判断できるため、加減速制御の開始条件が成立したと判断する(ステップS5)。しかし本実施形態では、種々の要因から加減速制御を実行しない方がよい場合も想定されるため、次に、加減速制御の実行を禁止する禁止条件が不成立であるか否かを判定する(ステップS6)。
【0057】
禁止条件の一例としては、クラッチ34が遮断状態となっている場合が挙げられる。つまり、クラッチ34が遮断状態であってエンジンEから後輪3への動力伝達自体が行われない場合には、加減速制御を実行しない(ステップS8)。これにより、加減速制御が無駄に実行されることが防止され、クラッチ34が遮断状態から接続状態に戻ったときの加速性能を良好に保つことができる。
【0058】
また、禁止条件の他の例としては、ブレーキ53が作動している場合が挙げられる。つまり、ブレーキ53が作動している場合には、加減速制御を実行しない(ステップS8)。これにより、後輪3のブレーキ時に加減速制御が無駄に実行されることが防止され、ブレーキ動作が解除されたときの加速性能を良好に保つことができる。
【0059】
また、禁止条件の他の例としては、加減速制御の継続時間が第1所定時間T1を超えている場合が挙げられる。つまり、仮に加減速制御が既に実行されていた場合に、その加減速制御の継続時間が第1所定時間T1を超える場合には、加速レスポンスへの影響を抑える必要があると判断して、加減速制御を停止させる(ステップS8)。
【0060】
また、禁止条件の他の例としては、加減速制御の前回終了時から第2所定時間T2が経過していない場合が挙げられる。つまり、加減速制御の前回終了時から第2所定時間T2が経過していない場合には、加速操作時における加減速制御の頻繁な繰り返しを防止する必要があると判断して、加減速制御を実行しない(ステップS8)。
【0061】
そして、前述した禁止条件が不成立である場合には、加減速制御を実行する(ステップS7)。具体的には、図6は減速走行から加速走行に移行する場合であるので、加減速制御として、点火時期を遅角してエンジンEの出力を低下させる制御を実行する。これにより、入力軸24と出力軸28との間の相対回転加速度が低減される。
【0062】
以上に説明した構成によれば、スロットル開度THが開度閾値TH1よりも大きく且つスロットル開度差分ΔTHが差分閾値ΔTH1+よりも大きい加速操作時にエンジン出力を低下させる制御を実行させるようにしたので(図7のB箇所)、減速から加速に移行する際におけるドッグクラッチ30の係合凸部36aと係合凹部37aとの間の衝突による大きなショックが低減され、乗り心地が向上する。さらに、動力伝達上流側の部材が動力伝達下流側の部材を加速側に強く押すことによるスリップの発生も防止されることになり、トラクション性能も向上する。
【0063】
また、減速中においては、入力軸24と出力軸28との間に閾値V1+より大きい相対回転速度Vが発生してもエンジン出力を低下させる制御が実行されないようになる(図7のA箇所)。さらに、減速から加速へ移行してから時間が経ったときにおいても、大きい相対回転速度Vが発生してもエンジン出力を低下させる制御は実行されないようになる(図7のC箇所)。したがって、エンジン出力を低下させる制御が頻繁に実行されることが防止されて、ドライバビリティが向上する。
【0064】
図8は図4に示す車両制御装置40の加速走行から減速走行への移行時における制御を説明するフローチャートである。図9は図8に示す制御を説明するタイミングチャートである。図8及び9に示すように、自動二輪車1の走行中において、まず、スロットル開度の差分ΔTHが負値である差分閾値ΔTH1-よりも小さいか否かが判定される(ステップS11)。ステップS11でNoの場合には、減速操作がなされてないと判断できるため、加減速制御を実行しない(ステップS18)。ステップS1でYesの場合には、スロットル開度THが開度閾値TH1より小さいか否かが判定される(ステップS12)。ステップS12でNoの場合には、エンジンEがあまり減速していないと判断できるため、加減速制御を実行しない(ステップS18)。
【0065】
ステップS12でYesの場合には、エンジンEを加速状態から減速状態に移行させる減速操作(過渡操作)がなされていると判断され、次いで、相対回転速度Vが負値である速度閾値V1-よりも小さいか否かが判定される(ステップS13)。ステップS13でNoの場合には、係合凸部36aと係合凹部37aとの間で大きな接触ショックが発生するほどの減速状態ではないと判断できるため、加減速制御を実行しない(ステップS18)。このように、相対回転速度Vの絶対値が大きくてドッグクラッチ30で強い衝突が発生しうるときに加減速制御を実行させるようにしているので、加減速制御が頻繁に実行されることが防止される。
【0066】
ステップS13でYesの場合には、相対回転位置Xが負値である位置閾値X1-よりも小さいか否かを判定する(ステップS14)。ステップS14でNoの場合には、ドッグクラッチ30の係合凸部36aが係合凹部37aの加速側の壁面37bから減速側の壁面37cに十分近づいていないと判断できるため、未だ加減速制御を実行しない(ステップS18)。このように、相対回転位置Xが位置閾値X1-を下回るまでは加減速制御を実行しないので、ドッグクラッチ30での衝突発生時に合わせて加減速制御を開始させることでき、加減速制御が無駄に長く続くことが防止される。
【0067】
ステップS14でYesの場合には、ドッグクラッチ30の係合凸部36aが係合凹部37aの加速側の壁面37bから減速側の壁面37cに十分近づいていると判断できるため、加減速制御の開始条件が成立したと判断する(ステップS5)。次に、加減速制御の実行を禁止する禁止条件が不成立であるか否かを判定する(ステップS6)。この禁止条件は前述した通りであるので、詳細な説明は省略する。そして、禁止条件が不成立である場合には、加減速制御を実行する(ステップS17)。具体的には、図8は加速走行から減速走行に移行する場合であるので、加減速制御として、点火時期を進角してエンジンEの出力を増加させる制御を実行する。これにより、入力軸24と出力軸28との間の相対回転加速度が低減される。
【0068】
以上に説明した構成によれば、スロットル開度THが開度閾値TH1よりも小さく且つスロットル開度差分ΔTHが差分閾値ΔTH1-よりも小さい減速操作時にエンジン出力を増加させる制御を実行させるようにしたので(図7のB箇所)、加速から減速に移行する際におけるドッグクラッチ30の係合凸部36aと係合凹部37aとの間の衝突による大きなショックが低減され、乗り心地が向上する。
【0069】
また、加速中においては、入力軸24と出力軸28との間に閾値V1-より小さい相対回転速度Vが発生してもエンジン出力を増加させる制御が実行されないようになる(図9のA箇所)。さらに、加速から減速へ移行してから時間が経ったときにおいても、相対回転速度Vの絶対値が大きくなってもエンジン出力を増加させる制御は実行されないようになる(図9のC箇所)。したがって、エンジン出力を増加させる制御が頻繁に実行されることが防止されて、ドライバビリティが向上する。
【0070】
(第2実施形態)
図10は本発明の第2実施形態に係る車両制御装置140の要部を説明するブロック図である。なお、第1実施形態と共通する構成については同一符号を付して説明を省略する。図10に示すように、本実施形態の車両制御装置140は、出力軸28(図2参照)を駆動する出力軸アシストモータ73と、後輪3(図1参照)のブレーキを作動させるブレーキアクチュエータ74とを備えている。車両制御装置140のECU117は、出力軸アシストモータ73を制御するモータ制御部70と、ブレーキアクチュエータ74を制御するブレーキ制御部71を有している。ECU117の加減速制御部63は、出力軸アシストモータ73又はブレーキアクチュエータ74を駆動して出力軸28を加減速することにより加減速制御を行う。
【0071】
以上の構成によれば、図6のステップS7において、遅角制御の代わりに、出力軸アシストモータ73を駆動して出力軸28を加速させる制御を行うことにより、減速から加速に移行する際における入力軸24と出力軸28との間の相対回転加速度が低減する。よって、減速から加速に移行する際におけるドッグクラッチ30の係合凸部36aと係合凹部37aとの間の衝突による大きなショックが低減され、乗り心地が向上する。
【0072】
また、図8のステップS17において、進角制御の代わりに、ブレーキアクチュエータ74を駆動して出力軸28を減速させる制御を行うことにより、加速から減速に移行する際における入力軸24と出力軸28との間の相対回転加速度が低減する。よって、加速から減速に移行する際におけるドッグクラッチ30の係合凸部36aと係合凹部37aとの間の衝突による大きなショックが低減され、乗り心地が向上する。
【0073】
(第3実施形態)
図11は本発明の第3実施形態に係る車両制御装置の減速走行から加速走行への移行時における制御を説明するフローチャートである。図12は図11に示す制御を説明するタイミングチャートである。なお、第1実施形態と共通する構成については同一符号を付して説明を省略する。本実施形態では、スロットル開度の代わりに吸気圧を利用して加減速判定を行っている。図11及び12に示すように、自動二輪車1の走行中において、吸気圧センサ49で検出された吸気圧の差分ΔPが正値である差分閾値ΔP1+よりも大きいか否かが判定される(ステップS31)。この際、吸気圧差分ΔPは、エンジンEの各気筒の吸気圧の平均値の差分でもよいし、特定の気筒の1サイクル毎の吸気圧のボトムピーク値の差分でもよい。
【0074】
ステップS31でNoの場合には、加速操作がなされてないと判断できるため、加減速制御を実行しない(ステップS8)。ステップS31でYesの場合には、ステップS3に進む。なお、ステップS3からステップS6は第1実施形態と同様であるため詳細な説明を省略する。そして、ステップS6でYesの場合には、加速操作中(ステップS1でのYes判定が継続している間)における開始条件の成立が1回目であるか否かが判定される(ステップS37)。
【0075】
ステップS37でNoの場合、即ち、加速操作中において開始条件が1回成立した後に開始条件が不成立となり、その後さらに開始条件が成立した場合には、減速から加速へ移行してから時間が経ったときであると判断して(図12のC箇所)、加減速制御を実行しない(ステップS8)。ステップS37でYesの場合には、減速から加速へ移行する過渡操作時であると判断して(図12のB箇所)、加減速制御を実行する(ステップS7)。
【0076】
なお、前述した各実施形態は一例であり、以下に述べるような変更を適宜行ってもよい。例えば、前記実施形態では自動二輪車1を例示しているが、動力源から駆動輪への動力伝達経路中の動力伝達部材が互いに遊びをもって係合されてなる車両であれば他の乗り物であってもよい。また前記実施形態では、動力源としてエンジンEを搭載した車両を例示しているが、エンジンの代わりにモータを搭載した電気自動車、またはモータとエンジンの両方を搭載したハイブリッド車であってもよい。その場合には、入力軸24を減速させる制御としてモータを減速させるように制御するとよい。
【0077】
また前記実施形態では、加減速判定部61はスロットル開度センサ45からの情報に基づいて加減速判定を行っているが、運転者が直接操作する入力部材であるスロットルグリップ7の開度を検出するグリップ開度センサからの情報に基づいて加減速判定を行ってもよい。
【0078】
また前記実施形態では、エンジン出力を低下させて入力軸24を加減速する加減速制御として遅角/進角制御が例示されているが、他の方法を用いてもよい。例えば、エンジンEの複数の気筒のうち一部の気筒の燃焼行程で点火しないことでエンジン出力を低下させてもよいし、インジェクタ47が噴射される燃料量を低減又はゼロにすることでエンジン出力を低下させてもよいし、スロットル弁で制御される吸気量を低減することでエンジン出力を低下させてもよい。
【0079】
また前記実施形態では、ドッグクラッチ30の動力伝達上流側にある入力軸として変速装置14の入力軸24が例示されているが、クランク軸22をドッグクラッチ30の動力伝達上流側にある入力軸として用いてもよい。その場合には、入力軸センサとしてクランク軸センサを用いるとよい。
【0080】
また前記実施形態では、クラッチ遮断判定手段としてクラッチスイッチ50を例示しているが、入力軸センサ51で得られた入力軸回転数Viが所定の閾値Vi1以上であり、出力軸センサ52で得られた出力軸回転数Voが所定の閾値Vo1以下であり、かつ、Vi1がVo1よりも所定値以上大きい場合に、クラッチ34が遮断状態になったと判定するようにしてもよい。
【産業上の利用可能性】
【0081】
以上のように、本発明に係る車両制御装置は、運転者の違和感が低減し、ドライバビリティが向上する優れた効果を有し、この効果の意義を発揮できる自動二輪車等の車両に広く適用すると有益である。
【符号の説明】
【0082】
1 自動二輪車(車両)
24 入力軸
28 出力軸
30 ドッグクラッチ
34 クラッチ
36a 係合凸部
37a 係合凹部
40 車両制御装置
42 メインスロットル弁
45 スロットル開度センサ
50 クラッチスイッチ(クラッチ遮断判定手段)
51 入力軸センサ
52 出力軸センサ
53 ブレーキ
55 ブレーキスイッチ(ブレーキ判定手段)
58 スロットル制御部
61 加減速判定部(加減速判定手段)
62 動力伝達状態検出部(動力伝達状態検出手段)
63 加減速制御部(加減速制御手段)
【特許請求の範囲】
【請求項1】
動力源から駆動輪への動力伝達経路中の動力伝達部材が互いに遊びをもって係合されてなる車両の制御装置であって、
運転者により所定の加減速操作がなされているか否かを判定する加減速判定手段と、
前記動力伝達経路のうち遊びのある係合部分に対して動力伝達上流側にある入力軸と、前記係合部分に対して動力伝達下流側にある出力軸との相対回転位置及び相対回転速度の少なくとも一方の値を検出する動力伝達状態検出手段と、
前記加減速判定手段により前記加減速操作がなされていると判定された場合には、前記動力伝達状態検出手段により検出された値に応じて、前記動力伝達部材間の接触速度及び伝達トルクの少なくとも一方が小さくなるように前記入力軸又は前記出力軸を加減速させる加減速制御を実行する加減速制御手段とを備えている、車両制御装置。
【請求項2】
前記動力源となるエンジンへの吸気量を調節するスロットル弁の開度を検出するスロットル開度センサを備え、
前記加減速判定手段は、前記スロットル開度センサにより検出されたスロットル開度に応じて所定の加減速操作がなされているか否かを判定する、請求項1に記載の車両制御装置。
【請求項3】
前記動力源となるエンジンの吸気圧を検出する吸気圧センサを備え、
前記加減速判定手段は、前記吸気圧センサにより検出された吸気圧に応じて所定の加減速操作がなされているか否かを判定する、請求項1に記載の車両制御装置。
【請求項4】
前記加減速判定手段は、前記動力源を減速状態から加速状態又は加速状態から減速状態に移行させるための運転者による操作の変化量が所定値より大きい過渡操作を前記加減速操作であると判定する、請求項1乃至3のいずれかに記載の車両制御装置。
【請求項5】
前記動力源となるエンジンへの吸気量を調節するスロットル弁の開度を検出するスロットル開度センサを備え、
前記加減速判定手段は、前記スロットル開度センサにより検出されたスロットル開度の差分が所定の正値の差分閾値より大きくなり、かつ、前記スロットル開度が所定の開度閾値よりも大きくなったときに、前記動力源を減速状態から加速状態に移行させる前記過渡操作がなされていると判定する、請求項4に記載の車両制御装置。
【請求項6】
前記動力源となるエンジンへの吸気量を調節するスロットル弁の開度を検出するスロットル開度センサを備え、
前記加減速判定手段は、前記スロットル開度センサにより検出されたスロットル開度の差分が所定の負値の差分閾値より小さくなり、かつ、前記スロットル開度が所定の開度閾値よりも小さくなったときに、前記動力源を加速状態から減速状態に移行させる前記過渡操作がなされていると判定する、請求項4又は5に記載の車両制御装置。
【請求項7】
前記加減速制御手段は、前記動力伝達状態検出手段で検出された前記相対回転速度の絶対値が所定の速度閾値より大きくなった場合に、前記加減速制御の実行を許可する、請求項1乃至6のいずれかに記載の車両制御装置。
【請求項8】
前記加減速制御手段は、前記加減速判定手段により前記加減速操作がなされていると判定された場合には、前記動力伝達状態検出手段により検出された前記相対回転位置の絶対値が所定の位置閾値を超えた時点から前記加減速制御を開始する、請求項1乃至7のいずれかに記載の車両制御装置。
【請求項9】
前記加減速制御手段は、前記加減速制御の実行中において前記加減速判定手段により前記加減速操作がなされていないと判定されると前記加減速制御を終了する、請求項1乃至8のいずれかに記載の車両制御装置。
【請求項10】
前記動力源となるエンジンへの吸気量を調節するスロットル弁の開度を検出するスロットル開度センサを備え、
前記加減速制御手段は、前記加減速制御の実行中において前記スロットル開度センサにより検出されたスロットル開度の差分の絶対値が所定の差分閾値以下となると前記加減速制御を終了する、請求項9に記載の車両制御装置。
【請求項11】
前記動力源となるエンジンの吸気圧を検出する吸気圧センサを備え、
前記加減速制御手段は、前記加減速制御の実行中において前記吸気圧センサにより検出された吸気圧の差分の絶対値が所定の差分閾値以下となると前記加減速制御を終了する、請求項9に記載の車両制御装置。
【請求項12】
前記加減速制御手段は、前記加減速制御の実行開始から第1所定時間が経過すると前記加減速制御の実行を終了させる、請求項1乃至11のいずれかに記載の車両制御装置。
【請求項13】
前記加減速制御手段は、前記加減速制御の終了後の第2所定時間内は前記加減速制御の実行を禁止する、請求項1乃至12のいずれかに記載の車両制御装置。
【請求項14】
前記動力伝達経路中に設けられたクラッチが遮断されたか否かを判定する前記クラッチ遮断判定手段を備え、
前記加減速制御手段は、前記クラッチ遮断判定手段により前記クラッチが遮断されたと判定された場合には、前記加減速制御の実行を禁止する、請求項1乃至13のいずれかに記載の車両制御装置。
【請求項15】
前記駆動輪のブレーキが作動したか否かを判定するブレーキ判定手段を備え、
前記加減速制御手段は、前記ブレーキ判定手段により前記ブレーキが作動したと判定された場合には、前記加減速制御の実行を禁止する、請求項1乃至14のいずれかに記載の車両制御装置。
【請求項1】
動力源から駆動輪への動力伝達経路中の動力伝達部材が互いに遊びをもって係合されてなる車両の制御装置であって、
運転者により所定の加減速操作がなされているか否かを判定する加減速判定手段と、
前記動力伝達経路のうち遊びのある係合部分に対して動力伝達上流側にある入力軸と、前記係合部分に対して動力伝達下流側にある出力軸との相対回転位置及び相対回転速度の少なくとも一方の値を検出する動力伝達状態検出手段と、
前記加減速判定手段により前記加減速操作がなされていると判定された場合には、前記動力伝達状態検出手段により検出された値に応じて、前記動力伝達部材間の接触速度及び伝達トルクの少なくとも一方が小さくなるように前記入力軸又は前記出力軸を加減速させる加減速制御を実行する加減速制御手段とを備えている、車両制御装置。
【請求項2】
前記動力源となるエンジンへの吸気量を調節するスロットル弁の開度を検出するスロットル開度センサを備え、
前記加減速判定手段は、前記スロットル開度センサにより検出されたスロットル開度に応じて所定の加減速操作がなされているか否かを判定する、請求項1に記載の車両制御装置。
【請求項3】
前記動力源となるエンジンの吸気圧を検出する吸気圧センサを備え、
前記加減速判定手段は、前記吸気圧センサにより検出された吸気圧に応じて所定の加減速操作がなされているか否かを判定する、請求項1に記載の車両制御装置。
【請求項4】
前記加減速判定手段は、前記動力源を減速状態から加速状態又は加速状態から減速状態に移行させるための運転者による操作の変化量が所定値より大きい過渡操作を前記加減速操作であると判定する、請求項1乃至3のいずれかに記載の車両制御装置。
【請求項5】
前記動力源となるエンジンへの吸気量を調節するスロットル弁の開度を検出するスロットル開度センサを備え、
前記加減速判定手段は、前記スロットル開度センサにより検出されたスロットル開度の差分が所定の正値の差分閾値より大きくなり、かつ、前記スロットル開度が所定の開度閾値よりも大きくなったときに、前記動力源を減速状態から加速状態に移行させる前記過渡操作がなされていると判定する、請求項4に記載の車両制御装置。
【請求項6】
前記動力源となるエンジンへの吸気量を調節するスロットル弁の開度を検出するスロットル開度センサを備え、
前記加減速判定手段は、前記スロットル開度センサにより検出されたスロットル開度の差分が所定の負値の差分閾値より小さくなり、かつ、前記スロットル開度が所定の開度閾値よりも小さくなったときに、前記動力源を加速状態から減速状態に移行させる前記過渡操作がなされていると判定する、請求項4又は5に記載の車両制御装置。
【請求項7】
前記加減速制御手段は、前記動力伝達状態検出手段で検出された前記相対回転速度の絶対値が所定の速度閾値より大きくなった場合に、前記加減速制御の実行を許可する、請求項1乃至6のいずれかに記載の車両制御装置。
【請求項8】
前記加減速制御手段は、前記加減速判定手段により前記加減速操作がなされていると判定された場合には、前記動力伝達状態検出手段により検出された前記相対回転位置の絶対値が所定の位置閾値を超えた時点から前記加減速制御を開始する、請求項1乃至7のいずれかに記載の車両制御装置。
【請求項9】
前記加減速制御手段は、前記加減速制御の実行中において前記加減速判定手段により前記加減速操作がなされていないと判定されると前記加減速制御を終了する、請求項1乃至8のいずれかに記載の車両制御装置。
【請求項10】
前記動力源となるエンジンへの吸気量を調節するスロットル弁の開度を検出するスロットル開度センサを備え、
前記加減速制御手段は、前記加減速制御の実行中において前記スロットル開度センサにより検出されたスロットル開度の差分の絶対値が所定の差分閾値以下となると前記加減速制御を終了する、請求項9に記載の車両制御装置。
【請求項11】
前記動力源となるエンジンの吸気圧を検出する吸気圧センサを備え、
前記加減速制御手段は、前記加減速制御の実行中において前記吸気圧センサにより検出された吸気圧の差分の絶対値が所定の差分閾値以下となると前記加減速制御を終了する、請求項9に記載の車両制御装置。
【請求項12】
前記加減速制御手段は、前記加減速制御の実行開始から第1所定時間が経過すると前記加減速制御の実行を終了させる、請求項1乃至11のいずれかに記載の車両制御装置。
【請求項13】
前記加減速制御手段は、前記加減速制御の終了後の第2所定時間内は前記加減速制御の実行を禁止する、請求項1乃至12のいずれかに記載の車両制御装置。
【請求項14】
前記動力伝達経路中に設けられたクラッチが遮断されたか否かを判定する前記クラッチ遮断判定手段を備え、
前記加減速制御手段は、前記クラッチ遮断判定手段により前記クラッチが遮断されたと判定された場合には、前記加減速制御の実行を禁止する、請求項1乃至13のいずれかに記載の車両制御装置。
【請求項15】
前記駆動輪のブレーキが作動したか否かを判定するブレーキ判定手段を備え、
前記加減速制御手段は、前記ブレーキ判定手段により前記ブレーキが作動したと判定された場合には、前記加減速制御の実行を禁止する、請求項1乃至14のいずれかに記載の車両制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2011−111133(P2011−111133A)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願番号】特願2009−272210(P2009−272210)
【出願日】平成21年11月30日(2009.11.30)
【出願人】(000000974)川崎重工業株式会社 (1,710)
【Fターム(参考)】
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願日】平成21年11月30日(2009.11.30)
【出願人】(000000974)川崎重工業株式会社 (1,710)
【Fターム(参考)】
[ Back to top ]