
車両制御装置
【課題】自動制御運転の不可能な道路で自動制御運転で運転を行うのを防止することができる車両制御装置を提供する。
【解決手段】車両制御装置1は、車両の現在地を検出し、位置検出精度が所定値以下である地点を識別する特定情報を取得し、特定情報が付与されている地点が有ることを取得したとき、自動制御運転を回避すべき処理を実行するナビゲーション装置3と、検出された現在地に基づいて、道路状態に応じて前記車両の自動制御運転を行う制御装置2とを備える。
【解決手段】車両制御装置1は、車両の現在地を検出し、位置検出精度が所定値以下である地点を識別する特定情報を取得し、特定情報が付与されている地点が有ることを取得したとき、自動制御運転を回避すべき処理を実行するナビゲーション装置3と、検出された現在地に基づいて、道路状態に応じて前記車両の自動制御運転を行う制御装置2とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の走行を自動的に制御する車両制御装置に関する。
【背景技術】
【0002】
現在位置候補検索処理によって検索された現在位置候補および周辺の道路状況に基づいて、車両のコーナ制御や交差点制御を許可するか否かを判断する車両制御装置が従来技術として知られている(たとえば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−221332号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
GPS(Global Positioning System)衛星から送信される電波の受信が困難である場合、車両の現在地の検出精度が悪くなる。特許文献1に記載の車両制御装置は、このような場合も現在位置候補および周辺の道路状況について問題がなければコーナ制御や交差点制御を許可する。したがって、特許文献1に記載の車両制御装置では、車両のコーナ制御や交差点制御を行えない道路を的確に検出できないという問題点がある。
【課題を解決するための手段】
【0005】
本発明による車両制御装置は、車両の現在地を検出する現在地検出手段と、現在地検出手段で検出された現在地に基づいて、道路状態に応じて車両の自動制御運転を行う運転制御手段と、現在地検出手段による位置検出精度が所定値以下である地点を識別する特定情報を取得する情報取得手段と、特定情報が付与されている地点が有ることを情報取得手段で取得したとき、自動制御運転を回避すべき処理を実行する回避手段とを備える。
【発明の効果】
【0006】
本発明の車両制御装置によれば、自動制御運転に適さない走行環境下での自動制御運転を回避することができる。
【図面の簡単な説明】
【0007】
【図1】本発明の第1の実施形態における車両制御装置の構成を示すブロック図である。
【図2】本発明の第1の実施形態における車両制御装置を構成するナビゲーション装置の構成を示すブロック図である。
【図3】本発明の第1の実施形態における車両制御装置が探索した推奨経路を説明するための図である。
【図4】本発明の第1の実施形態における車両制御装置の自動制御運転処理を説明するためのフローチャートである。
【図5】表示モニタの画面に表示された車両の現在地周辺の地図を説明するための図である。
【図6】図6(a)は車両の現在地から自動制御運転不可道路進入地点までの距離が500mになったときに表示される画面を説明するための図であり、図6(b)は車両の現在地から自動制御運転不可道路進入地点までの距離が50mになったときに表示される画面を説明するための図である。
【図7】本発明の第2実施形態における車両制御装置の自動制御運転不可道路報知処理を説明するためのフローチャートである。
【図8】本発明の第2実施形態における車両制御装置の自動制御運転不可道路報知処理を説明するためのフローチャートである。
【図9】本発明の第2実施形態における車両制御装置の自動制御運転不可道路報知処理を説明するためのフローチャートである。
【図10】本発明の第2実施形態における車両制御装置の自動制御運転不可道路報知処理を説明するためのフローチャートである。
【発明を実施するための形態】
【0008】
−第1の実施形態−
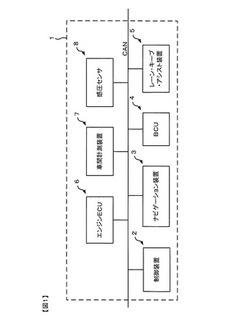
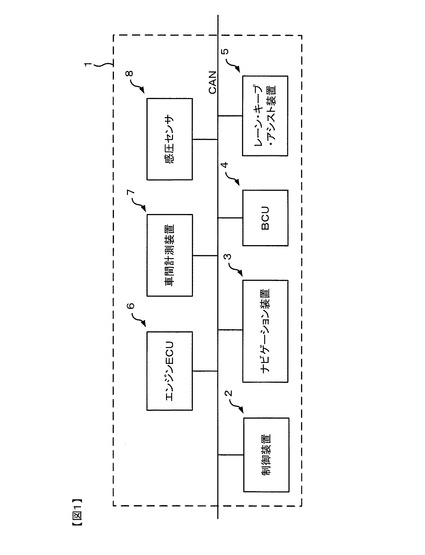
図1は、本発明の第1の実施形態による車両制御装置1を示す。この車両制御装置1は、車両が一時停止しなくてはならない地点に接近すると車両を減速させたり、道路のコーナを適正速度で通過したりするように車速を制御するものである。また、車両制御装置1は、運転者がステアリングを操作しなくても車両を道なりに旋回させることができる。車両制御装置1は、制御装置2と、ナビゲーション装置3と、BCU(Brake Booster Control Unit)4と、レーン・キープ・アシスト装置5と、エンジンECU(Electronic Control Unit)6と、車間計測装置7と、感圧センサ8とを有する。車載制御装置1を構成するこれらの装置はCAN(Control Area Network)により接続される。
【0009】
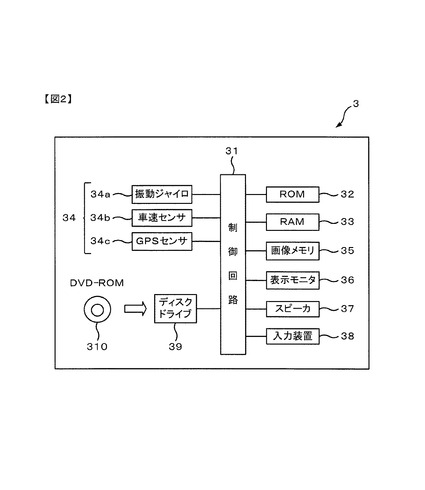
図2を参照して、車載制御装置1を構成するナビゲーション装置3を説明する。ナビゲーション装置3は、制御回路31、ROM32、RAM33、現在地検出装置34、画像メモリ35、表示モニタ36、スピーカ37、入力装置38およびディスクドライブ39を有する。ディスクドライブ39には、地図データが記憶されたDVD−ROM310が装填される。
【0010】
制御回路31は、マイクロプロセッサ及びその周辺回路からなり、RAM33を作業エリアとしてROM32に格納された制御プログラムを実行してナビゲーション装置3の各種制御を行う。たとえば、制御回路31は、DVD−ROM310に記憶された地図データに基づいて所定の経路探索を行い、探索した経路を表示モニタ36に表示させる。
【0011】
現在地検出装置34は車両の現在地を検出する装置である。現在検出装置34は、振動ジャイロ34a、車速センサ34b、GPSセンサ34cなどからなる。振動ジャイロ34aは車両の進行方向を検出し、車速センサ34bは車速を検出し、GPSセンサ34cはGPS衛星からのGPS信号を検出する。制御回路31は、この現在地検出装置34により検出された各種信号に基づいて車両の現在地を算出する。算出された現在地は、表示モニタ36に表示されている地図に表示される。
【0012】
画像メモリ35は、表示モニタ36に表示する画像データを格納する。この画像データは地図描画用データや各種の図形データからなり、それらはDVD−ROM310に記憶された地図データに基づいて適宜生成される。ナビゲーション装置3は、このようにして生成された画像データを用いることによって地図表示などを行うことができる。
【0013】
ディスクドライブ39は、DVD−ROM310から地図データを読み出す。地図データは、道路を表すノードデータおよびリンクデータで構成されるリンク列データを含んでいる。リンクデータはさらに、道路種別データ、道路幅員データ、レーン数データ、分岐路データ、一時停止地点のデータ、属性データなどを含んで構成されている。
【0014】
道路種別データは、後述する都市間高速道路、都市高速道路、有料道路、一般国道、都道府県道、市町村道、一般道路、細街路を識別するデータである。道路幅員データは道路の幅員のデータ、レーン数データは道路のレーン数のデータである。分岐路データは、分岐路に接続する接続道路データ、分岐路における接続道路のリンク接続角度である。一時停止地点のデータは、道路上における一時停止の規制標識が設置されている地点のデータである。
【0015】
また、地図表示用データは広域から詳細まで複数の縮尺の地図表示用データを有する。これらの複数の縮尺の地図表示用データを使用してユーザの要求にしたがって表示地図の縮尺を変更することができる。なお、DVD−ROM310以外の他の記録メディア、たとえばCD−ROMやハードディスクなどより地図データを読み出してもよい。
【0016】
本実施の形態の車両制御装置1は、検出した車両の現在地と地図データとに基づいて上述したような自動制御運転を行う。しかし、位置検出精度が所定値以下の地点、つまり現在地の検出精度の低い地点では、自動制御運転の開始位置や終了位置が適切に行われない可能性があるから、自動制御運転を禁止する。そのため、自動制御運転を禁止する自動制御運転禁止フラグを後述するリンクデータの属性データとして地図データに付加する。走行中に自動制御運転禁止フラグが設定されている道路を事前に認識して、その道路を運転者に報知したり自動制御運転を禁止したりすることができる。
【0017】
自動制御運転を禁止する道路(以下、自動制御不可道路と呼ぶ)には以下のものがある。トンネルの中の道路やビルの駐車場、高層ビルの群集地帯の道路、2層構造の高速道路の下の道路、密集した樹木の中の道路、近くに似た形状の道路がある道路、碁盤目状の道路、緩やかなY字路の道路、S字カーブの連続する道路、ループ橋の道路などである。
【0018】
制御回路31は、算出している車両の現在地および車両の進行方向に基づいて、車両がこれから進行する経路を推定することができる。以下、この経路を推定経路と呼ぶ。
【0019】
車両前方の道路に分起点が存在する場合、制御回路31は以下のようにして推定経路を推定する。分起点から分岐する道路の道路種別のうち、都市間高速道路、都市高速道路、有料道路、一般国道、都道府県道、市町村道、一般道路の順序で優先して推定経路を推定する。たとえば、車両がY字路にさしかかると、一方の道路が国道で他方の道路が県道の場合、国道を推定経路として推定する。一般道路より幅員が狭い細街路については推定経路から除外する。
【0020】
道路種別で経路を選択できないときは、分岐点前後の道路に対応する一対のリンクのなすリンク角度に基づいて推定経路を推定する。車両が分起点に進入するリンクと、それ以外の分起点から分岐するリンクとの間のリンク角度を算出し比較する。そして、最もリンク角度が小さいリンクに対応する道路を推定経路として推定する。
【0021】
表示モニタ36は、現在地付近の地図などの各種情報を画面表示としてユーザに提供する。スピーカ37は、各種入力操作をユーザに指示したり、各種情報を報知したりするための音声を出力する。入力装置38は、ユーザが各種コマンドを設定するための入力スイッチを有し、操作パネル上のボタンスイッチなどによって実現される。
【0022】
ユーザは、表示モニタ36の画像の指示やスピーカ37からの音声指示にしたがって、入力装置38を操作して目的地を設定する。
【0023】
目的地がユーザにより設定されると、ナビゲーション装置3は、制御回路31で算出されている現在地を出発地とし、目的地までの経路演算を所定のアルゴリズムに基づいて行う。以下、この経路演算を経路探索と呼ぶ。このようにして探索された経路は、表示形態、たとえば表示色などを変えることによって他の道路と区別して表示される。また、ナビゲーション装置3は、経路にしたがって車両が走行できるように、ユーザに対して表示モニタ36の画像やスピーカ37から出力される音声による指示で経路案内を行う。
【0024】
図1のBCU4は、制御装置2からの指令にしたがって不図示のブレーキ装置のブレーキ液圧を調整し、車両の制動を行う。レーン・キープ・アシスト装置5は道路上の白線を不図示のカメラで撮影し、車両が2本の白線の間を走行するようにステアリングの操舵を制御する。エンジンECU6は、制御装置2からの指令にしたがって不図示のエンジンのスロットルバルブの開度を制御する。車間計測装置7は、車両前方にレーザを照射し、先行車両などからの反射光を検出する。検出した信号を元に先行車両との車間距離や先行車両の相対速度を算出する。感圧センサ8は、車両のステアリングに設置されている圧力スイッチであり、運転者がステアリングを握っているか否かを検出する。
【0025】
制御装置2は、ナビゲーション装置3が探索した経路、またナビゲーション装置3が推定した推定経路にしたがって自動制御運転できるようにナビゲーション装置3、BCU4などを制御する。自動制御運転とは、運転者が不図示のアクセルペダルやブレーキペダルを踏み込まなくても車両が自動的に加速や減速してくれたり、運転者が不図示のステアリングを操作しなくても自動的に旋回したりする運転であり、たとえば、次の(1)〜(3)である。
【0026】
(1)制御装置2は、ナビゲーション装置3に記憶されている地図データに基づいて一時停止地点を検出する。車両が所定の速度を越えて一時停止地点に接近しようとすると、制御装置2は車両が減速するようにBCU4にブレーキ液圧指令を要求する。それを受け、BCU4はブレーキブースタのアクチュエータを駆動し、減速させる。
【0027】
(2)制御装置2は、ナビゲーション装置3に記憶されている地図データに基づいて車両進行方向の車速を制御する必要のあるコーナ、すなわち曲率半径が所定値以下のコーナの有無を検出する。コーナの曲率半径は、リンク情報に含まれるリンク形状の情報やノード情報におけるノードの配列の情報から算出する。また、曲線の曲率半径より、コーナを通過するのに最適な速度を算出する。車両がこの最適な速度を越えて道路のコーナに進入しようとすると、制御装置2は最適な速度に車両が減速するようにBCU4にブレーキ液圧指令を要求する。それを受け、BCU4はブレーキブースタのアクチュエータを駆動し、減速させる。
【0028】
(3)制御装置2は、レーン・キープ・アシスト装置5に対して上述したステアリング自動操舵運転を指令する。
【0029】
自動制御運転をしているとき、運転者はステアリングを握らず、ブレーキペダルやアクセルペダルを踏み込まないことになる。
【0030】
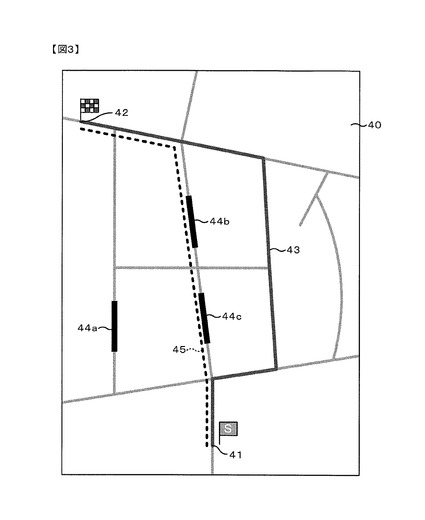
図3を参照して、本発明の第1の実施形態における自動制御運転処理について説明する。図3は、自動制御装置1が探索する経路を説明するための図である。符号40は地図を示し、符号41は出発地を示し、符号42は目的地を示す。符号44a〜44cは、現在地検出装置34による現在地の検出精度が低い道路、つまり自動制御運転不可道路を示す。車両制御装置1は、出発地41から目的地42に至る距離が最短であるある経路45を最初に探索する。そして、その経路45が自動制御不可道路44a〜44cを通過することが検出されると、車両制御装置1は、自動制御運転不可道路44a〜44cを回避する経路のうちの最短距離の経路43を新たに探索する。
【0031】
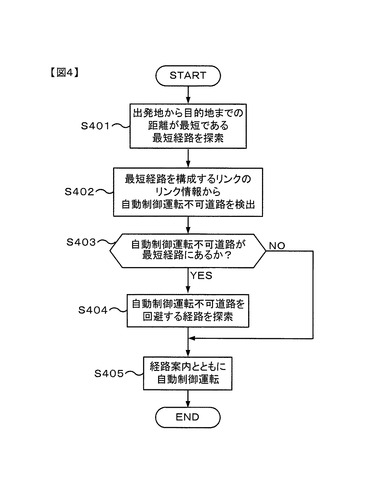
本発明の第1の実施形態における車両制御装置1の自動制御運転処理について図4のフローチャートを参照して説明する。図4の処理は、経路探索の出発地および目的地が設定されるとスタートするプログラムを実行してナビゲーション装置3の制御回路31において行われる。
【0032】
ステップS401では、出発地から目的地までの距離が最短である最短経路を探索する。ステップS402では、最短経路を構成するリンクにおけるリンクデータの属性データから自動制御運転不可道路を検出する。ステップS403では、最短経路に自動制御運転不可道路があるか否かを判定する。自動制御運転不可道路が最短経路にある場合はステップS403が肯定判定され、ステップS404へ進む。最短経路に自動制御運転不可道路がない場合はステップS403が否定判定され、ステップS405へ進む。
【0033】
ステップS404では、自動制御運転不可道路を回避する経路を探索する。具体的には、自動制御運転不可道路に対応するリンクのリンクコストを非常に高くして経路探索を行い、自動制御運転不可道路を通過する経路が探索されないようにする。ステップS405では、探索された経路にしたがって車両が走行するように経路案内を行うとともに、必要に応じて自動制御運転を行う。
【0034】
以上の第1の実施形態による車両制御装置1は次のような作用効果を奏する。
(1)車両制御装置1は、推奨経路演算に際して、推奨経路中に位置検出精度が所定値以下である特定地点を含まないように推奨経路を演算するようにした。したがって、自動制御運転に必要な情報が得られない経路を経由して目的地に到達するリスクを低減することができる。その結果、経路中の自動制御運転の信頼性を高めることが可能となる。
【0035】
(2)推奨経路演算に利用する地図データにおいて、特定地点を含むリンクには大きなリンクコストを付与するようにした。したがって、推奨経路演算に際して抽出された複数本の経路のうち、リンクコストが最も小さい経路を推奨経路として抽出するだけで、特定位置を含まない、または特定地点が少ない推奨経路を決定することができる。すなわち、リンクコストの最小値を最適な経路として選択する従来のアルゴリズムを用いることができるので、特定地点を回避するアルゴリズムを新たに設定する必要がない。
【0036】
−第2の実施形態−
本発明の第2の実施形態による車両制御装置について説明する。本発明の第2の実施形態における車両制御装置は、自動制御運転を行っているとき、自動制御運転不可道路に近づくと、自動制御運転不可道路の接近を運転者に報知する。第2実施形態における車両制御装置の構成は、第1の実施形態における車両制御装置1の構成と同じなので、本発明の第2実施形態における車両制御装置の構成の説明は省略する。
【0037】
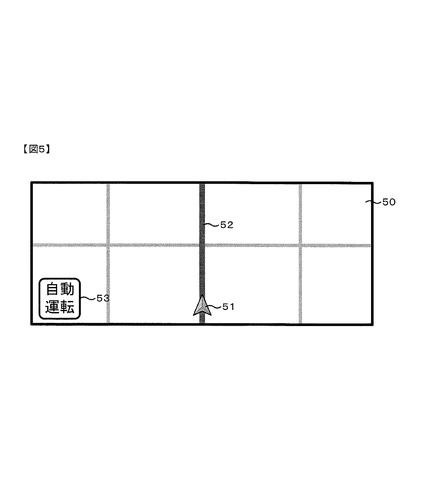
図5および図6を参照して、本発明の第2の実施形態における車両制御装置の自動制御運転不可道路報知処理について説明する。運転者は、自動制御運転を行っているものとして説明する。図5は、ナビゲーション装置3の表示モニタ36上の画面を示す図である。符号50は車両の現在地周辺の地図を示す。地図50上には、車両の現在地を示す自車位置マーク51と推定経路52とが表示されるとともに、自動制御運転を行っていることを示すアイコン53も表示される。
【0038】
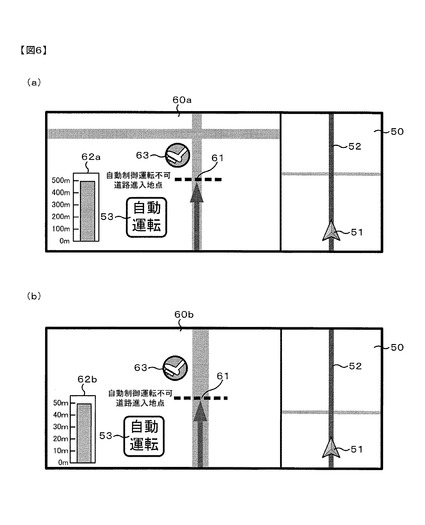
車両が、自動制御運転不可道路に進入する地点(以下、進入地点と呼ぶ)より手前500mの位置にさしかかると、「この先、自動制御運転不可道路に進入しますので自動制御運転を中止します。ご自身で車を運転してください。」という音声がナビゲーション装置3のスピーカ37から出力される。そして、図6(a)に示すように、車両の現在地周辺の地図50と、進入地点周辺の拡大地図60aとが表示モニタ36の画面に表示される。つまり、表示モニタ36の画面は2分割される。
【0039】
拡大地図60aには、進入地点61を示す破線と、車両の現在地から進入地点61までの距離を示したインジケータ62aとが表示される。インジケータ62aは、車両の現在地と進入地点との間の距離をバーの長さで表示したものであり、車両が進入地点61に近づくにしたがってバーの長さは短くなる。また、拡大地図60aには、進入地点61より先は運転者自身の操作で運転しなければならないことを示すアイコン63と、自動制御運転を行っていることを示すアイコン53とが表示される。
【0040】
車両が進入地点61より手前50mの位置に到達すると、「まもなく自動制御運転不可道路に進入しますので、自動制御運転を中止します。ご自身で車を運転してください。」という音声がスピーカ37から出力される。そして、図6(b)に示すように、画面には、拡大地図60aに比べて縮尺が詳細地図側である拡大地図60bが表示されるとともに、インジケータ62aに比べて詳細な距離を表示するインジケータ62bが表示される。そして、自動制御運転不可道路に進入することを報知するブザー音がスピーカ37から出力される。
【0041】
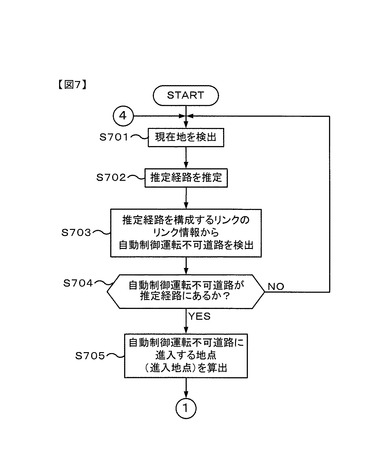
本発明の第2実施形態における車両制御装置1の自動制御運転不可道路報知処理について図7〜10のフローチャートを参照して説明する。図7〜10の処理は、自動制御運転を開始するとスタートするプログラムを実行してナビゲーション装置3の制御回路31において行われる。
【0042】
ステップS701では、現在地検出装置34によって現在地を検出する。ステップS702では、推定経路を推定する。ステップS703では、推定経路を構成するリンクのリンク情報から自動制御運転不可道路を検出する。ステップS704では、自動制御運転不可道路が推定経路にあるか否かを判定する。自動制御運転不可道路が推定経路にある場合はステップS704が肯定判定され、ステップS705へ進む。自動制御運転不可道路が推定経路にない場合はステップS704が否定判定され、ステップS701に戻る。ステップS705では、自動制御運転不可道路に進入する地点を算出する。以下、自動制御運転不可道路に進入する地点を進入地点と呼ぶ。そして、図8のステップS801へ進む。
【0043】
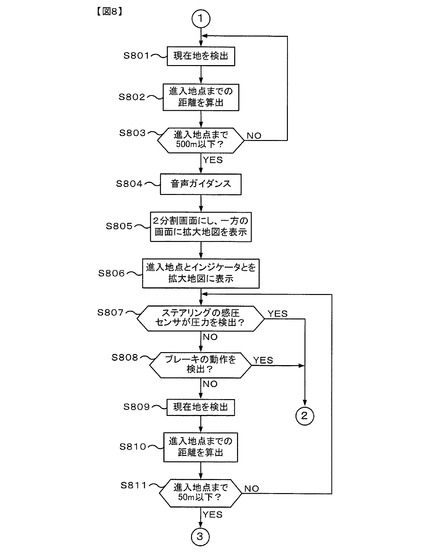
図8のステップS801では、現在地検出装置34によって車両の現在地を検出する。ステップS802では、車両の現在地から進入地点までの距離を算出する。ステップS803では、進入地点までの距離が500m以下であるか否かを判定する。500m以下の場合はステップS803が肯定判定され、ステップS804へ進む。500mより大きい場合はステップS803が否定判定され、ステップS801に戻る。
【0044】
ステップS804では、「この先、自動制御運転不可道路に進入しますので、自動制御運転を中止します。ご自身で車を運転してください。」という音声をスピーカ37から出力して音声ガイダンスを行う。ステップS805では、表示モニタ36の表示を2分割画面にし、現在地周辺の地図を右側の画面に表示し、進入地点周辺の拡大地図を左側の画面に表示する。ステップS806では、進入地点と進入地点までの距離を示すインジケータとを左側の拡大地図に表示する。
【0045】
ステップS807では、ステアリングに設けた感圧センサ8が圧力を検出しているか否かを判定する。これにより、運転者の手動操作による運転の意思を確認することができる。感圧センサ8が圧力を検出している場合はステップS807が肯定判定され、図10のステップS1001へ進む。感圧センサ8が圧力を検出していない場合はステップS807が否定判定され、ステップS808へ進む。ステップS808では、BCU4から出力されるブレーキの情報に基づいて運転者のブレーキペダルの踏み込みによるブレーキの動作が検出されたか否かを判定する。これにより、運転者の手動操作による運転の意思を確認することができる。ブレーキの動作が検出された場合はステップS808が肯定判定され、図10のステップS1001へ進む、ブレーキの動作が検出されない場合はステップS808が否定判定され、ステップS809に進む。
【0046】
ステップS809では、車両の現在地を検出する。ステップS810では、車両の現在地から進入地点までの距離を算出する。ステップS811では、進入地点までの距離が50m以下であるか否かを判定する。50m以下の場合はステップS811が肯定判定され、図9のステップS901へ進む。50mより大きい場合はステップS811が否定判定され、ステップS807に戻る。
【0047】
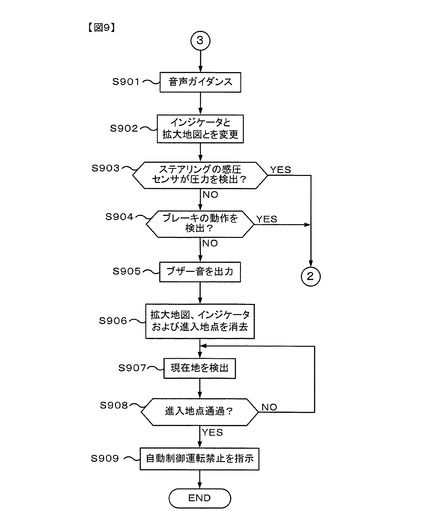
図9のステップS901では、「この先、自動制御運転不可道路に進入しますので、自動制御運転を中止します。ご自身で車を運転してください。」という音声をスピーカ37から出力して音声ガイダンスを行う。ステップS902では、拡大地図の縮尺を詳細地図側に変更する。また、インジケータも目盛が細かいものに変更する。
【0048】
ステップS903では、ステアリングに設けた感圧センサ8が圧力を検出しているか否かを判定する。感圧センサ8が圧力を検出している場合はステップS903が肯定判定され、図10のステップS1001へ進む。感圧センサ8が圧力を検出していない場合はステップS903が否定判定され、ステップS904へ進む。ステップS904では、BCU4から出力されるブレーキの情報に基づいてブレーキの動作が検出されたか否かを判定する。ブレーキの動作が検出された場合はステップS904が肯定判定され、図10のステップS1001へ進む、ブレーキの動作が検出されない場合はステップS904が否定判定され、ステップS905へ進む。
【0049】
ステップS905では、スピーカ37からブザー音を出力する。ステップS906では、表示モニタ36に表示した拡大地図、インジケータおよび進入点を消去する。ステップS907では、車両の現在地を検出する。ステップS908では、進入地点を通過したか否かを判定する。進入地点を通過した場合はステップS908が肯定判定され、ステップS909へ進む。進入地点を通過していない場合はステップS908が否定判定され、ステップS907に戻る。ステップS909では、自動制御運転の禁止を制御装置2に指示する。
【0050】
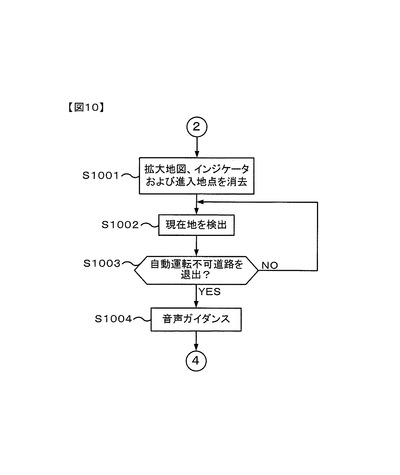
図10のステップS1001では、表示モニタ36に表示した拡大地図、インジケータおよび進入地点を消去する。ステップS1002では、車両の現在地を検出する。ステップS1003では、車両の現在地に対応するリンクのリンク情報に基づいて、車両が自動制御運転不可道路を退出したか否かを判定する。車両が自動制御運転不可道路を退出した場合はステップS1003が肯定判定され、ステップS1004へ進む。車両が自動制御運転不可道路を退出していない場合はステップS1003が否定判定され、ステップS1002に戻る。ステップS1004では、「自動制御運転不可道路を退出しました。自動制御運転を再開します。」という音声をスピーカ37から出力し、音声ガイダンスを行う。そして、図7のステップS701に戻る。
【0051】
以上説明した第2の実施形態による車両制御装置では次のような作用効果を奏する。
(1)自動制御運転モードが選択されている場合、車両制御装置1は、推奨経路または推定経路を走行中、前方に位置検出精度が所定値以下である特定地点が存在することを検出すると、自動制御運転モードをキャンセルするようにした。したがって、自動制御運転に必要な情報が入手できない経路での自動制御運転を回避できる。
【0052】
(2)特定地点手前の第1の地点において、自動制御運転モードがキャンセルされること、および、手動運転を要請する音声を出力するようにしたので、自動制御運転ができない地点に到達するまでに十分な余裕時間を持たせることができ、運転者は確実に手動運転に切換えることができる。
【0053】
(3)上記第1の地点よりも前方に位置する第2の地点に車両が到達したとき、運転者が手動運転の意思表示を行っていることを条件として、上記報知を停止するようにした。したがって、自動制御運転できない地点が前方にあることを運転者が意識するまで、報知を継続して行うことができるので、より信頼性の高いシステムを提供できる。
【0054】
−変形例−
以上の実施の形態の車両制御装置1を次のように変形することができる。
(1)本発明は以上の実施形態の車両制御装置に限定されない。すなわち、車両の現在地を検出する現在地検出装置と、現在地検出装置で検出された現在地に基づいて、道路状態に応じて車両の自動制御運転を行う運転制御装置と、現在地検出装置による位置検出精度が所定値以下である地点を識別する特定情報を取得する情報取得装置と、特定情報が付与されている地点が有ることを情報取得装置で取得したとき、自動制御運転を回避すべき処理を実行する回避装置とを備える車両制御装置であれば、その構成は上記実施形態に限定されない。情報取得装置は地図データに予め記録した特定地点情報を取得してもよいし、通信により外部から特定地点情報を取得してもよい。回避装置による回避処理として、上述したように推奨経路演算において特定地点を含む経路を除外する処理、特定地点手前で自動制御運転をキャンセルする処理の他、特定地点手前で自動制御運転に必要な情報が入手できないことを報知する処理など、特定地点での自動制御運転を回避する処理であればどのような処理でもよい。
【0055】
(2)雪道では車両の現在地の検出精度が低いので、雪道を自動制御運転不可道路に設定するようにしてもよい。雪道の判断は、たとえば、道路交通情報などから入手した路面情報を用いることができる。
【0056】
(3)現在地の検出精度の悪い道路の情報をDVD−ROM310に記憶されている地図データより取得した。しかし、情報センタから通信手段を利用して現在地の検出精度の低い道路の情報を取得するなど、位置検出精度が低い道路の情報を車両外部から取得するようにしてもよい。この場合、車両制御装置は、情報センタからの情報を受信するための通信装置を備える。この通信装置により、位置検出精度が低い道路の最新情報を取得する。しかしながら、全ての道路について現在地の検出精度の低い道路の情報を情報センタより受信できるとは限らないので、DVD−ROM310に記憶されている情報と、情報センタより取得した情報とを併用することが好ましい。
【0057】
(4)ヘッドアップディスプレイに自動制御運転不可道路の進入地点などを表示するようにしてもよい。運転者は表示モニタ36に視線を移す必要がなくなり、より安全に寄与することができる。
【0058】
(5)車両の現在地から自動制御運転不可道路の進入地点までの距離をインジケータによって表示したが、車両の現在地から自動制御運転不可道路の進入地点までの距離を認識できるものであればインジケータに限定されない。
【0059】
(6)位置検出精度が低い地点への接近を運転者に報知できれば、その報知手段は以上の実施形態に限定されない。また、進入地点より先は運転者自身の操作で運転しなければならないことを報知できれば、その報知方法は以上の実施形態に限定されない。
【0060】
実施形態と変形例の一つ、もしくは複数を組み合わせることも可能である。変形例同士をどのように組み合わせることも可能である。
【0061】
以上の説明はあくまで一例であり、本発明は上記の実施形態に何ら限定されるものではない。
【符号の説明】
【0062】
1 車両制御装置
2 制御装置
3 ナビゲーション装置
4 BCU
5 レーン・キープ・アシスト装置
6 エンジンECU
7 車間計測装置
8 感圧センサ
34 現在地検出装置
36 表示モニタ
37 スピーカ
39 ディスクドライブ
43,45 経路
44a〜44c 自動制御運転不可道路
60a,60b 拡大地図
61 自動制御運転不可道路進入地点
62a,62b インジケータ
310 DVD−ROM
【技術分野】
【0001】
本発明は、車両の走行を自動的に制御する車両制御装置に関する。
【背景技術】
【0002】
現在位置候補検索処理によって検索された現在位置候補および周辺の道路状況に基づいて、車両のコーナ制御や交差点制御を許可するか否かを判断する車両制御装置が従来技術として知られている(たとえば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−221332号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
GPS(Global Positioning System)衛星から送信される電波の受信が困難である場合、車両の現在地の検出精度が悪くなる。特許文献1に記載の車両制御装置は、このような場合も現在位置候補および周辺の道路状況について問題がなければコーナ制御や交差点制御を許可する。したがって、特許文献1に記載の車両制御装置では、車両のコーナ制御や交差点制御を行えない道路を的確に検出できないという問題点がある。
【課題を解決するための手段】
【0005】
本発明による車両制御装置は、車両の現在地を検出する現在地検出手段と、現在地検出手段で検出された現在地に基づいて、道路状態に応じて車両の自動制御運転を行う運転制御手段と、現在地検出手段による位置検出精度が所定値以下である地点を識別する特定情報を取得する情報取得手段と、特定情報が付与されている地点が有ることを情報取得手段で取得したとき、自動制御運転を回避すべき処理を実行する回避手段とを備える。
【発明の効果】
【0006】
本発明の車両制御装置によれば、自動制御運転に適さない走行環境下での自動制御運転を回避することができる。
【図面の簡単な説明】
【0007】
【図1】本発明の第1の実施形態における車両制御装置の構成を示すブロック図である。
【図2】本発明の第1の実施形態における車両制御装置を構成するナビゲーション装置の構成を示すブロック図である。
【図3】本発明の第1の実施形態における車両制御装置が探索した推奨経路を説明するための図である。
【図4】本発明の第1の実施形態における車両制御装置の自動制御運転処理を説明するためのフローチャートである。
【図5】表示モニタの画面に表示された車両の現在地周辺の地図を説明するための図である。
【図6】図6(a)は車両の現在地から自動制御運転不可道路進入地点までの距離が500mになったときに表示される画面を説明するための図であり、図6(b)は車両の現在地から自動制御運転不可道路進入地点までの距離が50mになったときに表示される画面を説明するための図である。
【図7】本発明の第2実施形態における車両制御装置の自動制御運転不可道路報知処理を説明するためのフローチャートである。
【図8】本発明の第2実施形態における車両制御装置の自動制御運転不可道路報知処理を説明するためのフローチャートである。
【図9】本発明の第2実施形態における車両制御装置の自動制御運転不可道路報知処理を説明するためのフローチャートである。
【図10】本発明の第2実施形態における車両制御装置の自動制御運転不可道路報知処理を説明するためのフローチャートである。
【発明を実施するための形態】
【0008】
−第1の実施形態−
図1は、本発明の第1の実施形態による車両制御装置1を示す。この車両制御装置1は、車両が一時停止しなくてはならない地点に接近すると車両を減速させたり、道路のコーナを適正速度で通過したりするように車速を制御するものである。また、車両制御装置1は、運転者がステアリングを操作しなくても車両を道なりに旋回させることができる。車両制御装置1は、制御装置2と、ナビゲーション装置3と、BCU(Brake Booster Control Unit)4と、レーン・キープ・アシスト装置5と、エンジンECU(Electronic Control Unit)6と、車間計測装置7と、感圧センサ8とを有する。車載制御装置1を構成するこれらの装置はCAN(Control Area Network)により接続される。
【0009】
図2を参照して、車載制御装置1を構成するナビゲーション装置3を説明する。ナビゲーション装置3は、制御回路31、ROM32、RAM33、現在地検出装置34、画像メモリ35、表示モニタ36、スピーカ37、入力装置38およびディスクドライブ39を有する。ディスクドライブ39には、地図データが記憶されたDVD−ROM310が装填される。
【0010】
制御回路31は、マイクロプロセッサ及びその周辺回路からなり、RAM33を作業エリアとしてROM32に格納された制御プログラムを実行してナビゲーション装置3の各種制御を行う。たとえば、制御回路31は、DVD−ROM310に記憶された地図データに基づいて所定の経路探索を行い、探索した経路を表示モニタ36に表示させる。
【0011】
現在地検出装置34は車両の現在地を検出する装置である。現在検出装置34は、振動ジャイロ34a、車速センサ34b、GPSセンサ34cなどからなる。振動ジャイロ34aは車両の進行方向を検出し、車速センサ34bは車速を検出し、GPSセンサ34cはGPS衛星からのGPS信号を検出する。制御回路31は、この現在地検出装置34により検出された各種信号に基づいて車両の現在地を算出する。算出された現在地は、表示モニタ36に表示されている地図に表示される。
【0012】
画像メモリ35は、表示モニタ36に表示する画像データを格納する。この画像データは地図描画用データや各種の図形データからなり、それらはDVD−ROM310に記憶された地図データに基づいて適宜生成される。ナビゲーション装置3は、このようにして生成された画像データを用いることによって地図表示などを行うことができる。
【0013】
ディスクドライブ39は、DVD−ROM310から地図データを読み出す。地図データは、道路を表すノードデータおよびリンクデータで構成されるリンク列データを含んでいる。リンクデータはさらに、道路種別データ、道路幅員データ、レーン数データ、分岐路データ、一時停止地点のデータ、属性データなどを含んで構成されている。
【0014】
道路種別データは、後述する都市間高速道路、都市高速道路、有料道路、一般国道、都道府県道、市町村道、一般道路、細街路を識別するデータである。道路幅員データは道路の幅員のデータ、レーン数データは道路のレーン数のデータである。分岐路データは、分岐路に接続する接続道路データ、分岐路における接続道路のリンク接続角度である。一時停止地点のデータは、道路上における一時停止の規制標識が設置されている地点のデータである。
【0015】
また、地図表示用データは広域から詳細まで複数の縮尺の地図表示用データを有する。これらの複数の縮尺の地図表示用データを使用してユーザの要求にしたがって表示地図の縮尺を変更することができる。なお、DVD−ROM310以外の他の記録メディア、たとえばCD−ROMやハードディスクなどより地図データを読み出してもよい。
【0016】
本実施の形態の車両制御装置1は、検出した車両の現在地と地図データとに基づいて上述したような自動制御運転を行う。しかし、位置検出精度が所定値以下の地点、つまり現在地の検出精度の低い地点では、自動制御運転の開始位置や終了位置が適切に行われない可能性があるから、自動制御運転を禁止する。そのため、自動制御運転を禁止する自動制御運転禁止フラグを後述するリンクデータの属性データとして地図データに付加する。走行中に自動制御運転禁止フラグが設定されている道路を事前に認識して、その道路を運転者に報知したり自動制御運転を禁止したりすることができる。
【0017】
自動制御運転を禁止する道路(以下、自動制御不可道路と呼ぶ)には以下のものがある。トンネルの中の道路やビルの駐車場、高層ビルの群集地帯の道路、2層構造の高速道路の下の道路、密集した樹木の中の道路、近くに似た形状の道路がある道路、碁盤目状の道路、緩やかなY字路の道路、S字カーブの連続する道路、ループ橋の道路などである。
【0018】
制御回路31は、算出している車両の現在地および車両の進行方向に基づいて、車両がこれから進行する経路を推定することができる。以下、この経路を推定経路と呼ぶ。
【0019】
車両前方の道路に分起点が存在する場合、制御回路31は以下のようにして推定経路を推定する。分起点から分岐する道路の道路種別のうち、都市間高速道路、都市高速道路、有料道路、一般国道、都道府県道、市町村道、一般道路の順序で優先して推定経路を推定する。たとえば、車両がY字路にさしかかると、一方の道路が国道で他方の道路が県道の場合、国道を推定経路として推定する。一般道路より幅員が狭い細街路については推定経路から除外する。
【0020】
道路種別で経路を選択できないときは、分岐点前後の道路に対応する一対のリンクのなすリンク角度に基づいて推定経路を推定する。車両が分起点に進入するリンクと、それ以外の分起点から分岐するリンクとの間のリンク角度を算出し比較する。そして、最もリンク角度が小さいリンクに対応する道路を推定経路として推定する。
【0021】
表示モニタ36は、現在地付近の地図などの各種情報を画面表示としてユーザに提供する。スピーカ37は、各種入力操作をユーザに指示したり、各種情報を報知したりするための音声を出力する。入力装置38は、ユーザが各種コマンドを設定するための入力スイッチを有し、操作パネル上のボタンスイッチなどによって実現される。
【0022】
ユーザは、表示モニタ36の画像の指示やスピーカ37からの音声指示にしたがって、入力装置38を操作して目的地を設定する。
【0023】
目的地がユーザにより設定されると、ナビゲーション装置3は、制御回路31で算出されている現在地を出発地とし、目的地までの経路演算を所定のアルゴリズムに基づいて行う。以下、この経路演算を経路探索と呼ぶ。このようにして探索された経路は、表示形態、たとえば表示色などを変えることによって他の道路と区別して表示される。また、ナビゲーション装置3は、経路にしたがって車両が走行できるように、ユーザに対して表示モニタ36の画像やスピーカ37から出力される音声による指示で経路案内を行う。
【0024】
図1のBCU4は、制御装置2からの指令にしたがって不図示のブレーキ装置のブレーキ液圧を調整し、車両の制動を行う。レーン・キープ・アシスト装置5は道路上の白線を不図示のカメラで撮影し、車両が2本の白線の間を走行するようにステアリングの操舵を制御する。エンジンECU6は、制御装置2からの指令にしたがって不図示のエンジンのスロットルバルブの開度を制御する。車間計測装置7は、車両前方にレーザを照射し、先行車両などからの反射光を検出する。検出した信号を元に先行車両との車間距離や先行車両の相対速度を算出する。感圧センサ8は、車両のステアリングに設置されている圧力スイッチであり、運転者がステアリングを握っているか否かを検出する。
【0025】
制御装置2は、ナビゲーション装置3が探索した経路、またナビゲーション装置3が推定した推定経路にしたがって自動制御運転できるようにナビゲーション装置3、BCU4などを制御する。自動制御運転とは、運転者が不図示のアクセルペダルやブレーキペダルを踏み込まなくても車両が自動的に加速や減速してくれたり、運転者が不図示のステアリングを操作しなくても自動的に旋回したりする運転であり、たとえば、次の(1)〜(3)である。
【0026】
(1)制御装置2は、ナビゲーション装置3に記憶されている地図データに基づいて一時停止地点を検出する。車両が所定の速度を越えて一時停止地点に接近しようとすると、制御装置2は車両が減速するようにBCU4にブレーキ液圧指令を要求する。それを受け、BCU4はブレーキブースタのアクチュエータを駆動し、減速させる。
【0027】
(2)制御装置2は、ナビゲーション装置3に記憶されている地図データに基づいて車両進行方向の車速を制御する必要のあるコーナ、すなわち曲率半径が所定値以下のコーナの有無を検出する。コーナの曲率半径は、リンク情報に含まれるリンク形状の情報やノード情報におけるノードの配列の情報から算出する。また、曲線の曲率半径より、コーナを通過するのに最適な速度を算出する。車両がこの最適な速度を越えて道路のコーナに進入しようとすると、制御装置2は最適な速度に車両が減速するようにBCU4にブレーキ液圧指令を要求する。それを受け、BCU4はブレーキブースタのアクチュエータを駆動し、減速させる。
【0028】
(3)制御装置2は、レーン・キープ・アシスト装置5に対して上述したステアリング自動操舵運転を指令する。
【0029】
自動制御運転をしているとき、運転者はステアリングを握らず、ブレーキペダルやアクセルペダルを踏み込まないことになる。
【0030】
図3を参照して、本発明の第1の実施形態における自動制御運転処理について説明する。図3は、自動制御装置1が探索する経路を説明するための図である。符号40は地図を示し、符号41は出発地を示し、符号42は目的地を示す。符号44a〜44cは、現在地検出装置34による現在地の検出精度が低い道路、つまり自動制御運転不可道路を示す。車両制御装置1は、出発地41から目的地42に至る距離が最短であるある経路45を最初に探索する。そして、その経路45が自動制御不可道路44a〜44cを通過することが検出されると、車両制御装置1は、自動制御運転不可道路44a〜44cを回避する経路のうちの最短距離の経路43を新たに探索する。
【0031】
本発明の第1の実施形態における車両制御装置1の自動制御運転処理について図4のフローチャートを参照して説明する。図4の処理は、経路探索の出発地および目的地が設定されるとスタートするプログラムを実行してナビゲーション装置3の制御回路31において行われる。
【0032】
ステップS401では、出発地から目的地までの距離が最短である最短経路を探索する。ステップS402では、最短経路を構成するリンクにおけるリンクデータの属性データから自動制御運転不可道路を検出する。ステップS403では、最短経路に自動制御運転不可道路があるか否かを判定する。自動制御運転不可道路が最短経路にある場合はステップS403が肯定判定され、ステップS404へ進む。最短経路に自動制御運転不可道路がない場合はステップS403が否定判定され、ステップS405へ進む。
【0033】
ステップS404では、自動制御運転不可道路を回避する経路を探索する。具体的には、自動制御運転不可道路に対応するリンクのリンクコストを非常に高くして経路探索を行い、自動制御運転不可道路を通過する経路が探索されないようにする。ステップS405では、探索された経路にしたがって車両が走行するように経路案内を行うとともに、必要に応じて自動制御運転を行う。
【0034】
以上の第1の実施形態による車両制御装置1は次のような作用効果を奏する。
(1)車両制御装置1は、推奨経路演算に際して、推奨経路中に位置検出精度が所定値以下である特定地点を含まないように推奨経路を演算するようにした。したがって、自動制御運転に必要な情報が得られない経路を経由して目的地に到達するリスクを低減することができる。その結果、経路中の自動制御運転の信頼性を高めることが可能となる。
【0035】
(2)推奨経路演算に利用する地図データにおいて、特定地点を含むリンクには大きなリンクコストを付与するようにした。したがって、推奨経路演算に際して抽出された複数本の経路のうち、リンクコストが最も小さい経路を推奨経路として抽出するだけで、特定位置を含まない、または特定地点が少ない推奨経路を決定することができる。すなわち、リンクコストの最小値を最適な経路として選択する従来のアルゴリズムを用いることができるので、特定地点を回避するアルゴリズムを新たに設定する必要がない。
【0036】
−第2の実施形態−
本発明の第2の実施形態による車両制御装置について説明する。本発明の第2の実施形態における車両制御装置は、自動制御運転を行っているとき、自動制御運転不可道路に近づくと、自動制御運転不可道路の接近を運転者に報知する。第2実施形態における車両制御装置の構成は、第1の実施形態における車両制御装置1の構成と同じなので、本発明の第2実施形態における車両制御装置の構成の説明は省略する。
【0037】
図5および図6を参照して、本発明の第2の実施形態における車両制御装置の自動制御運転不可道路報知処理について説明する。運転者は、自動制御運転を行っているものとして説明する。図5は、ナビゲーション装置3の表示モニタ36上の画面を示す図である。符号50は車両の現在地周辺の地図を示す。地図50上には、車両の現在地を示す自車位置マーク51と推定経路52とが表示されるとともに、自動制御運転を行っていることを示すアイコン53も表示される。
【0038】
車両が、自動制御運転不可道路に進入する地点(以下、進入地点と呼ぶ)より手前500mの位置にさしかかると、「この先、自動制御運転不可道路に進入しますので自動制御運転を中止します。ご自身で車を運転してください。」という音声がナビゲーション装置3のスピーカ37から出力される。そして、図6(a)に示すように、車両の現在地周辺の地図50と、進入地点周辺の拡大地図60aとが表示モニタ36の画面に表示される。つまり、表示モニタ36の画面は2分割される。
【0039】
拡大地図60aには、進入地点61を示す破線と、車両の現在地から進入地点61までの距離を示したインジケータ62aとが表示される。インジケータ62aは、車両の現在地と進入地点との間の距離をバーの長さで表示したものであり、車両が進入地点61に近づくにしたがってバーの長さは短くなる。また、拡大地図60aには、進入地点61より先は運転者自身の操作で運転しなければならないことを示すアイコン63と、自動制御運転を行っていることを示すアイコン53とが表示される。
【0040】
車両が進入地点61より手前50mの位置に到達すると、「まもなく自動制御運転不可道路に進入しますので、自動制御運転を中止します。ご自身で車を運転してください。」という音声がスピーカ37から出力される。そして、図6(b)に示すように、画面には、拡大地図60aに比べて縮尺が詳細地図側である拡大地図60bが表示されるとともに、インジケータ62aに比べて詳細な距離を表示するインジケータ62bが表示される。そして、自動制御運転不可道路に進入することを報知するブザー音がスピーカ37から出力される。
【0041】
本発明の第2実施形態における車両制御装置1の自動制御運転不可道路報知処理について図7〜10のフローチャートを参照して説明する。図7〜10の処理は、自動制御運転を開始するとスタートするプログラムを実行してナビゲーション装置3の制御回路31において行われる。
【0042】
ステップS701では、現在地検出装置34によって現在地を検出する。ステップS702では、推定経路を推定する。ステップS703では、推定経路を構成するリンクのリンク情報から自動制御運転不可道路を検出する。ステップS704では、自動制御運転不可道路が推定経路にあるか否かを判定する。自動制御運転不可道路が推定経路にある場合はステップS704が肯定判定され、ステップS705へ進む。自動制御運転不可道路が推定経路にない場合はステップS704が否定判定され、ステップS701に戻る。ステップS705では、自動制御運転不可道路に進入する地点を算出する。以下、自動制御運転不可道路に進入する地点を進入地点と呼ぶ。そして、図8のステップS801へ進む。
【0043】
図8のステップS801では、現在地検出装置34によって車両の現在地を検出する。ステップS802では、車両の現在地から進入地点までの距離を算出する。ステップS803では、進入地点までの距離が500m以下であるか否かを判定する。500m以下の場合はステップS803が肯定判定され、ステップS804へ進む。500mより大きい場合はステップS803が否定判定され、ステップS801に戻る。
【0044】
ステップS804では、「この先、自動制御運転不可道路に進入しますので、自動制御運転を中止します。ご自身で車を運転してください。」という音声をスピーカ37から出力して音声ガイダンスを行う。ステップS805では、表示モニタ36の表示を2分割画面にし、現在地周辺の地図を右側の画面に表示し、進入地点周辺の拡大地図を左側の画面に表示する。ステップS806では、進入地点と進入地点までの距離を示すインジケータとを左側の拡大地図に表示する。
【0045】
ステップS807では、ステアリングに設けた感圧センサ8が圧力を検出しているか否かを判定する。これにより、運転者の手動操作による運転の意思を確認することができる。感圧センサ8が圧力を検出している場合はステップS807が肯定判定され、図10のステップS1001へ進む。感圧センサ8が圧力を検出していない場合はステップS807が否定判定され、ステップS808へ進む。ステップS808では、BCU4から出力されるブレーキの情報に基づいて運転者のブレーキペダルの踏み込みによるブレーキの動作が検出されたか否かを判定する。これにより、運転者の手動操作による運転の意思を確認することができる。ブレーキの動作が検出された場合はステップS808が肯定判定され、図10のステップS1001へ進む、ブレーキの動作が検出されない場合はステップS808が否定判定され、ステップS809に進む。
【0046】
ステップS809では、車両の現在地を検出する。ステップS810では、車両の現在地から進入地点までの距離を算出する。ステップS811では、進入地点までの距離が50m以下であるか否かを判定する。50m以下の場合はステップS811が肯定判定され、図9のステップS901へ進む。50mより大きい場合はステップS811が否定判定され、ステップS807に戻る。
【0047】
図9のステップS901では、「この先、自動制御運転不可道路に進入しますので、自動制御運転を中止します。ご自身で車を運転してください。」という音声をスピーカ37から出力して音声ガイダンスを行う。ステップS902では、拡大地図の縮尺を詳細地図側に変更する。また、インジケータも目盛が細かいものに変更する。
【0048】
ステップS903では、ステアリングに設けた感圧センサ8が圧力を検出しているか否かを判定する。感圧センサ8が圧力を検出している場合はステップS903が肯定判定され、図10のステップS1001へ進む。感圧センサ8が圧力を検出していない場合はステップS903が否定判定され、ステップS904へ進む。ステップS904では、BCU4から出力されるブレーキの情報に基づいてブレーキの動作が検出されたか否かを判定する。ブレーキの動作が検出された場合はステップS904が肯定判定され、図10のステップS1001へ進む、ブレーキの動作が検出されない場合はステップS904が否定判定され、ステップS905へ進む。
【0049】
ステップS905では、スピーカ37からブザー音を出力する。ステップS906では、表示モニタ36に表示した拡大地図、インジケータおよび進入点を消去する。ステップS907では、車両の現在地を検出する。ステップS908では、進入地点を通過したか否かを判定する。進入地点を通過した場合はステップS908が肯定判定され、ステップS909へ進む。進入地点を通過していない場合はステップS908が否定判定され、ステップS907に戻る。ステップS909では、自動制御運転の禁止を制御装置2に指示する。
【0050】
図10のステップS1001では、表示モニタ36に表示した拡大地図、インジケータおよび進入地点を消去する。ステップS1002では、車両の現在地を検出する。ステップS1003では、車両の現在地に対応するリンクのリンク情報に基づいて、車両が自動制御運転不可道路を退出したか否かを判定する。車両が自動制御運転不可道路を退出した場合はステップS1003が肯定判定され、ステップS1004へ進む。車両が自動制御運転不可道路を退出していない場合はステップS1003が否定判定され、ステップS1002に戻る。ステップS1004では、「自動制御運転不可道路を退出しました。自動制御運転を再開します。」という音声をスピーカ37から出力し、音声ガイダンスを行う。そして、図7のステップS701に戻る。
【0051】
以上説明した第2の実施形態による車両制御装置では次のような作用効果を奏する。
(1)自動制御運転モードが選択されている場合、車両制御装置1は、推奨経路または推定経路を走行中、前方に位置検出精度が所定値以下である特定地点が存在することを検出すると、自動制御運転モードをキャンセルするようにした。したがって、自動制御運転に必要な情報が入手できない経路での自動制御運転を回避できる。
【0052】
(2)特定地点手前の第1の地点において、自動制御運転モードがキャンセルされること、および、手動運転を要請する音声を出力するようにしたので、自動制御運転ができない地点に到達するまでに十分な余裕時間を持たせることができ、運転者は確実に手動運転に切換えることができる。
【0053】
(3)上記第1の地点よりも前方に位置する第2の地点に車両が到達したとき、運転者が手動運転の意思表示を行っていることを条件として、上記報知を停止するようにした。したがって、自動制御運転できない地点が前方にあることを運転者が意識するまで、報知を継続して行うことができるので、より信頼性の高いシステムを提供できる。
【0054】
−変形例−
以上の実施の形態の車両制御装置1を次のように変形することができる。
(1)本発明は以上の実施形態の車両制御装置に限定されない。すなわち、車両の現在地を検出する現在地検出装置と、現在地検出装置で検出された現在地に基づいて、道路状態に応じて車両の自動制御運転を行う運転制御装置と、現在地検出装置による位置検出精度が所定値以下である地点を識別する特定情報を取得する情報取得装置と、特定情報が付与されている地点が有ることを情報取得装置で取得したとき、自動制御運転を回避すべき処理を実行する回避装置とを備える車両制御装置であれば、その構成は上記実施形態に限定されない。情報取得装置は地図データに予め記録した特定地点情報を取得してもよいし、通信により外部から特定地点情報を取得してもよい。回避装置による回避処理として、上述したように推奨経路演算において特定地点を含む経路を除外する処理、特定地点手前で自動制御運転をキャンセルする処理の他、特定地点手前で自動制御運転に必要な情報が入手できないことを報知する処理など、特定地点での自動制御運転を回避する処理であればどのような処理でもよい。
【0055】
(2)雪道では車両の現在地の検出精度が低いので、雪道を自動制御運転不可道路に設定するようにしてもよい。雪道の判断は、たとえば、道路交通情報などから入手した路面情報を用いることができる。
【0056】
(3)現在地の検出精度の悪い道路の情報をDVD−ROM310に記憶されている地図データより取得した。しかし、情報センタから通信手段を利用して現在地の検出精度の低い道路の情報を取得するなど、位置検出精度が低い道路の情報を車両外部から取得するようにしてもよい。この場合、車両制御装置は、情報センタからの情報を受信するための通信装置を備える。この通信装置により、位置検出精度が低い道路の最新情報を取得する。しかしながら、全ての道路について現在地の検出精度の低い道路の情報を情報センタより受信できるとは限らないので、DVD−ROM310に記憶されている情報と、情報センタより取得した情報とを併用することが好ましい。
【0057】
(4)ヘッドアップディスプレイに自動制御運転不可道路の進入地点などを表示するようにしてもよい。運転者は表示モニタ36に視線を移す必要がなくなり、より安全に寄与することができる。
【0058】
(5)車両の現在地から自動制御運転不可道路の進入地点までの距離をインジケータによって表示したが、車両の現在地から自動制御運転不可道路の進入地点までの距離を認識できるものであればインジケータに限定されない。
【0059】
(6)位置検出精度が低い地点への接近を運転者に報知できれば、その報知手段は以上の実施形態に限定されない。また、進入地点より先は運転者自身の操作で運転しなければならないことを報知できれば、その報知方法は以上の実施形態に限定されない。
【0060】
実施形態と変形例の一つ、もしくは複数を組み合わせることも可能である。変形例同士をどのように組み合わせることも可能である。
【0061】
以上の説明はあくまで一例であり、本発明は上記の実施形態に何ら限定されるものではない。
【符号の説明】
【0062】
1 車両制御装置
2 制御装置
3 ナビゲーション装置
4 BCU
5 レーン・キープ・アシスト装置
6 エンジンECU
7 車間計測装置
8 感圧センサ
34 現在地検出装置
36 表示モニタ
37 スピーカ
39 ディスクドライブ
43,45 経路
44a〜44c 自動制御運転不可道路
60a,60b 拡大地図
61 自動制御運転不可道路進入地点
62a,62b インジケータ
310 DVD−ROM
【特許請求の範囲】
【請求項1】
車両の現在地を検出する現在地検出手段と、
前記現在地検出手段で検出された現在地に基づいて、道路状態に応じて前記車両の自動制御運転を行う運転制御手段と、
前記現在地検出手段による位置検出精度が所定値以下である地点を識別する特定情報を取得する情報取得手段と、
前記特定情報が付与されている地点が有ることを前記情報取得手段で取得したとき、前記自動制御運転を回避すべき処理を実行する回避手段とを備えることを特徴とする車両制御装置。
【請求項2】
請求項1に記載の車両制御装置において、
前記回避手段は、車両前方の経路上に前記特定情報が付与されている地点がある場合、前記運転制御手段による自動制御運転を禁止することを特徴とする車両制御装置。
【請求項3】
請求項2に記載の車両制御装置において、
前記回避手段は、前記特定情報が付与された地点が車両前方の第1距離まで接近すると、前記自動制御運転を中止すること、および手動運転すべきことを運転者に報知する報知制御手段をさらに含むことを特徴とする車両制御装置。
【請求項4】
請求項3に記載の車両制御装置において、
前記報知制御手段は、前記報知制御手段による前記報知が行われた後、前記特定情報が付与された地点が車両前方の第2距離(<第1距離)まで接近したとき、運転者の手動操作の意思を確認し、その意思が確認されると、前記報知を停止することを特徴とする車両制御装置。
【請求項5】
請求項2乃至4のいずれか1項に記載の車両制御装置において、
前記検出されている現在地より前方の道路状況に基づいて、車両が走行すべき経路を推定し、その推定経路を運転者に報知する推定経路報知手段をさらに備え、
前記報知された推定経路を走行中に、前記回避手段が前記回避処理を実行することを特徴とする車両制御装置。
【請求項6】
請求項2乃至5のいずれか1項に記載の車両制御装置において、
前記自動制御運転は、車両が通過する道路の曲率半径に応じて車速を制限する車速制限制御運転であることを特徴とする車両制御装置。
【請求項7】
請求項1に記載の車両制御装置において、
現在地から目的地までの経路を演算する演算手段を備え、
前記回避手段は、前記演算手段により、前記特定情報が付与されている地点が含まれないように経路を演算する処理を含むことを特徴とする車両制御装置。
【請求項1】
車両の現在地を検出する現在地検出手段と、
前記現在地検出手段で検出された現在地に基づいて、道路状態に応じて前記車両の自動制御運転を行う運転制御手段と、
前記現在地検出手段による位置検出精度が所定値以下である地点を識別する特定情報を取得する情報取得手段と、
前記特定情報が付与されている地点が有ることを前記情報取得手段で取得したとき、前記自動制御運転を回避すべき処理を実行する回避手段とを備えることを特徴とする車両制御装置。
【請求項2】
請求項1に記載の車両制御装置において、
前記回避手段は、車両前方の経路上に前記特定情報が付与されている地点がある場合、前記運転制御手段による自動制御運転を禁止することを特徴とする車両制御装置。
【請求項3】
請求項2に記載の車両制御装置において、
前記回避手段は、前記特定情報が付与された地点が車両前方の第1距離まで接近すると、前記自動制御運転を中止すること、および手動運転すべきことを運転者に報知する報知制御手段をさらに含むことを特徴とする車両制御装置。
【請求項4】
請求項3に記載の車両制御装置において、
前記報知制御手段は、前記報知制御手段による前記報知が行われた後、前記特定情報が付与された地点が車両前方の第2距離(<第1距離)まで接近したとき、運転者の手動操作の意思を確認し、その意思が確認されると、前記報知を停止することを特徴とする車両制御装置。
【請求項5】
請求項2乃至4のいずれか1項に記載の車両制御装置において、
前記検出されている現在地より前方の道路状況に基づいて、車両が走行すべき経路を推定し、その推定経路を運転者に報知する推定経路報知手段をさらに備え、
前記報知された推定経路を走行中に、前記回避手段が前記回避処理を実行することを特徴とする車両制御装置。
【請求項6】
請求項2乃至5のいずれか1項に記載の車両制御装置において、
前記自動制御運転は、車両が通過する道路の曲率半径に応じて車速を制限する車速制限制御運転であることを特徴とする車両制御装置。
【請求項7】
請求項1に記載の車両制御装置において、
現在地から目的地までの経路を演算する演算手段を備え、
前記回避手段は、前記演算手段により、前記特定情報が付与されている地点が含まれないように経路を演算する処理を含むことを特徴とする車両制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−118603(P2011−118603A)
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願番号】特願2009−274665(P2009−274665)
【出願日】平成21年12月2日(2009.12.2)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願日】平成21年12月2日(2009.12.2)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]