
車両制御装置
【課題】車々間通信できない他車両のうち、協調走行制御の制御内容に影響を与える他車両を検出し、画面上でその他車両を強調して表示する。
【解決手段】車々間通信機能を有していない他車両であって、自車両の協調走行制御の制御内容を変更する可能性のある制御対象車両を特定し、その車両のアイコンを地図画面上で強調表示する。
【解決手段】車々間通信機能を有していない他車両であって、自車両の協調走行制御の制御内容を変更する可能性のある制御対象車両を特定し、その車両のアイコンを地図画面上で強調表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の走行支援制御を行う車両制御装置に関する。
【背景技術】
【0002】
カメラやレーダ等の監視装置および車々間通信によって自車両近傍の他車両の走行状況や、位置関係等に関する情報を取得し、他車両と連携して車両事故を防止するように自車両の走行支援制御を行う車両制御装置が開示されている(たとえば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−62912号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されている発明によると、車々間通信装置を搭載した他車両と協調した走行支援制御(協調走行制御)を行うことができるが、車々間通信装置を搭載しない他車両の存在を考慮していない。
【課題を解決するための手段】
【0005】
本発明による車両制御装置は、地図上の自車両の位置を検出する自車両位置検出手段と、自車両周囲の移動体を検出する周囲車両検出手段と、自車両周囲の移動体と車々間通信を行う車々間通信手段と、周囲車両検出手段で検出された自車両周囲の移動体のうち、車々間通信手段による通信を行うことができる移動体(以下、第1の移動体)と、車々間通信手段による通信を行うことができない移動体(以下、第2の移動体)とを弁別する弁別手段と、車々間通信手段で授受した各種情報に基づいて、自車両が第1の移動体と協調走行するように運転制御を行う運転制御手段と、第2の移動体のうち、自車両への接近によって協調走行のための運転制御を変更する必要のある移動体を特定移動体として特定する特定手段と、第1の移動体と協調した走行を行うように運転制御手段が運転制御を行っている際、特定移動体が特定されると、運転制御手段による運転制御が変更されることを報知する報知手段とを備え、運転制御手段は、特定手段で特定移動体が特定されると、協調走行のための運転制御を変更することを特徴とする。
【発明の効果】
【0006】
本発明による車両制御装置によれば、車々間通信装置を搭載しない車両周囲の移動体のうち、自車両に接近して自車両の協調走行制御を変更するおそれのある移動体を正確に特定して運転者に報知することができる。
【図面の簡単な説明】
【0007】
【図1】本実施の形態の車両制御装置10の構成を示す図。
【図2】運転支援制御装置200の構成を示す図。
【図3】本発明の一実施の形態における制御処理の概要を説明するための図。
【図4】案内出力制御処理手順を示すフローチャート。
【図5】制御対象車両のアイコンを強調表示した一例を示す図。
【図6】サブルーチン「制御対象車両特定」の内容を示すフローチャート。
【図7】サブルーチン「協調走行制御」の内容を示すフローチャート。
【発明を実施するための形態】
【0008】
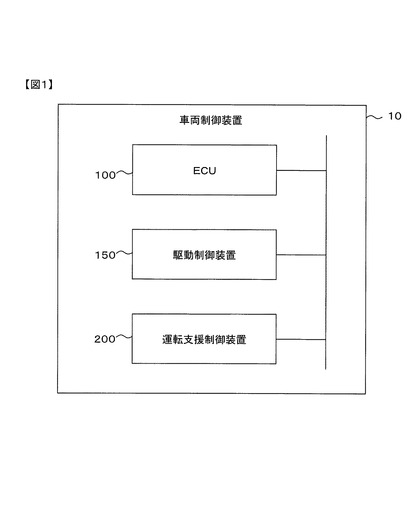
図1〜図7を参照して、本発明による車両制御装置の一実施の形態を説明する。図1は、本実施の形態の車両制御装置10の構成を示す図である。
【0009】
図1に示す車両制御装置10は、互いにバスで接続されるECU(Electronic Control Unit)100と、駆動制御装置150と、運転支援制御装置200とを含んで構成される。ECU100は、車両を電子制御するためのマイクロコンピュータを有する主制御装置である。駆動制御装置150は、たとえば、操舵装置の操舵反力付与装置、アクセル装置のスロットル装置やペダル反力付与装置、ブレーキランプ装置、警音装置を含む。運転支援制御装置200は、ECU100との間で各種情報を授受して駆動制御装置150を制御することにより、自車両の走行支援制御を行う。駆動制御装置150は運転者の操作によっても駆動制御される。
【0010】
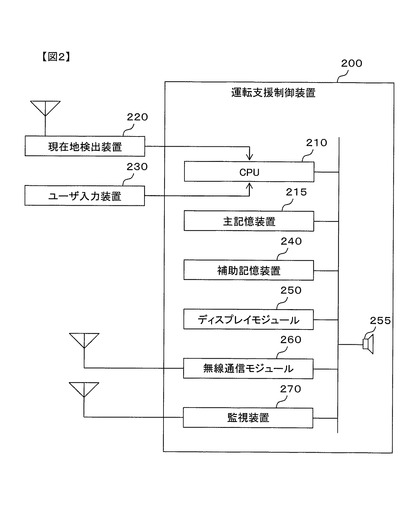
図2は、運転支援制御装置200の構成を示す図である。CPU210は運転支援制御装置200全体を制御する演算処理装置であり、CPU210およびその周辺装置は互いにバスで接続されている。周辺装置は、主記憶装置215、補助記憶装置240、ディスプレイモジュール250、スピーカ255、無線通信モジュール260、およびレーザレーダやカメラに代表される周囲状況の監視装置270を含む。主記憶装置215は、CPU210の作業エリアであるワークメモリや制御プログラムが格納されているプログラムメモリを有する。
【0011】
CPU210においては、現在地検出装置220およびユーザ入力装置230からの信号が入力される。現在地検出装置220は、たとえば、GPSセンサ、ジャイロセンサ、および車速センサである。ユーザ入力装置230は、たとえば、タッチパネル、パネル周辺の押ボタン式スイッチ、リモコン、およびジョイスティックである。
【0012】
補助記憶装置240は、道路地図データやPOI(Point Of Interest:観光地や各種施設)情報を格納する記憶装置である。補助記憶装置240としては、たとえば、ハードディスクドライブのほか、道路地図データが格納されたCDやDVD、フラッシュメモリ、その他の記録媒体、およびその読み出し装置であっても良い。
【0013】
道路地図データにおいては、一本の道路は、交差点などをノードとして定義し、ノード間をリンクとして定義することによって、リンク列データとして表される。したがって、リンク列データは、ノードデータおよびリンクデータから構成される。道路地図データは、ノードデータとリンクデータとが、メッシュコードとともにメッシュ領域単位で分類して格納されている。メッシュ領域とは、道路地図を所定範囲毎に区分けしたときの区分けされた各領域をいう。メッシュコードの記憶領域には、メッシュ領域を識別する番号が格納されている。リンク列データの記憶領域には、ノードの位置座標と、ノード間のリンクを表すリンク番号と、リンクをさらに短く分割する補間点の位置座標とが格納されている。これらの位置座標が地図表示やロケータ処理の形状データとして用いられる。
【0014】
ディスプレイモジュール250は、CPU210から出力される文字や図形を含む画像データに基づいて画面表示し、スピーカ255は、CPU210から出力される音声データに基づいて発声する。無線通信モジュール260は、アンテナを介して他車両との車々間無線通信を行うために用いられる。監視装置270は、自車両周囲の他車両の走行状況や、位置関係等に関する情報を取得するために用いられる。
【0015】
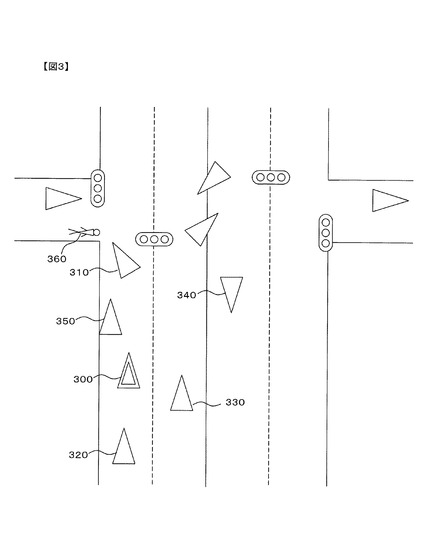
図3は、本実施の形態における制御処理の概要を説明するための図である。図3においては、自車両300が片側2車線ずつで対向する幹線道路の左車線を走行しており、自車両300に対し、前方の他車両310、後方の他車両320、側方の他車両330が、自車両300と同一方向に走行している。ただし、側方の他車両330は、自車両300が走行する車線と隣接する車線を走行している。
【0016】
自車両300は、自車両と同一方向に走行している他車両310〜330との間で車々間通信ができない場合、すなわち、他車両310〜330が車々間通信装置を搭載していない場合、他車両310〜330の挙動の予測困難性を考慮した自車両300の協調走行制御を行う必要がある。車々間通信できない他車両のうち、同一方向に走行している車両は、自車両に接近する可能性が高いので、こうした車両を以下では、「制御対象車両」と呼び、表示画面上で他の車両よりも強調して表示する。
【0017】
一方、対向する他車両340は、車々間通信機能を有していない場合であっても、自車両300とは異なる対向車線上に位置するため、自車両300に接近する可能性がなく、その挙動の予測困難性を考慮する必要が無い。こうした車両を以下では、「制御非対象車両」と呼ぶ。
【0018】
なお、対向する他車両340が、自車両300との関係において、中央線の無い細道路(対向一車線の道路)に対向する関係であったならば、車々間通信機能を有していない限りにおいて、その挙動の予測困難性を考慮する必要がある。したがって、その場合は、対向の他車両340は、制御対象車両に該当することとする。
【0019】
また、車々間通信機能を有している他車両は、対向一車線の道路を走行中であるか、対向2車線の道路を走行中であるかに拘わらず、自車両300との関係において、その挙動の予測困難性を考慮する必要が無いため、常に制御非対象車両に該当する。すなわち、自車両は、車々間通信によって他車両の走行状況を受信しているので、それらの走行状況を運転者に報知すれば、自車両の運転者は、前方車両、後方車両、あるいは側方車両の挙動を予測した運転を行うことができる。
【0020】
自車両周囲の他車両のうち車々間通信できない車両を特定する方法について説明する。
自車両の位置は、現在地検出装置220で検出される。現在地検出装置200は、GPSセンサを含み、GPSセンサで受信したGPS信号に基づいて自車両の地図上の位置を検出する。他車両の位置は、監視装置270で自車両周囲の他車両を検出し、検出した他車両の位置を自車両に対する相対位置として算出し、算出された相対位置と自車両の地図上の位置とに基づいて他車両の地図上の位置を演算する。これにより、自車両、および自車両周囲の他車両をそれぞれ示すアイコンをディスプレイモジュール250の画面上に表示することができる。
【0021】
運転支援制御装置200は、車々間通信装置を搭載した他車両との間で車々間通信を行い、他車両の位置情報(緯度、経度データ)、車速データなどを入手する。入手した位置情報に基づいて、表示画面上にアイコンで表示された他車両のうち、位置情報を受信した他車両を特定することができる。位置情報を受信した他車両が車々間通信可能な他車両であり、それ以外の他車両が車々間通信装置を搭載しない車両である。この実施の形態では、車々間通信装置を搭載しない他車両が検出されると、後述する協調走行制御の制御内容を変更し、あるいは、協調走行制御を中止する。
【0022】
図3を参照して、制御対象車両、制御非対象車両の弁別について説明する。図3に示す交差点には、信号機が設置されている。信号機の設置された交差点に、自車両300が所定値以上の速度で直進方向に進入する場合は、左右に交差する道路上の他車両は、その交差点に進入しないため、その挙動の予測困難性を考慮する必要が無く、制御非対象車両に該当する。また、対向車線上の他車両は、直進および左折の場合は自車両300に影響は無く、右折の場合は一旦停車するため、やはりその挙動の予測困難性を考慮する必要が無く、制御非対象車両に該当する。しかし、自車両300がその交差点で速度がほぼ0となる場合も考えられる。例えば、その交差点で右左折する場合、あるいは信号待ちで停車する場合である。そのような場合は、交差する道路上の他車両は、制御対象車両に該当することになる。
【0023】
図3には、自車両300と同一車線上に位置している駐車中の他車両350を示している。駐車車両は走行しないため、その挙動の予測困難性を考慮する必要が無く、したがって、駐車中の他車両350は制御非対象車両に該当する。
【0024】
図3においては、人360が交差点付近に位置している。人360についても、自車両300との関係において、他車両310〜350と同様に定義することにより、他車両とみなすことができる。以下では、他車両310〜350は人360をも含むものとする。
【0025】
信号機が設置されていない交差点に自車両300が進入する場合は、交差するいずれの道路上においても、他車両が車々間通信機能を有していない限りにおいては、その挙動の予測困難性を考慮する必要がある。したがって、その場合は、いずれの他車両も制御対象車両に該当することとする。
【0026】
また、交差点付近でない場合、中央線がある道路を走行中の自車両の周囲に位置する他車両については、車々間通信装置を搭載していなければ、自車両と異なる方向に走行する車両は制御非対象車両と認識し、同一方向に走行する車両は制御対象車両と認識する。中央線がない道路を走行中の自車両の周囲に位置する他車両については、走行方向に関係なく車々間通信装置を搭載していなければ制御非対象車両と認識する。いずれの道路においても、自車両の周囲に位置する他車両は、車々間通信装置を搭載していれば、制御非対象車両と認識する。
【0027】
この実施の形態による車両制御装置では、車々間通信で授受する情報に基づいて、前方車両に追従走行する追従運転走行制御や、前方道路の曲率に応じて進入速度を制御するいわゆる地図連動車両制御のような協調走行制御も行う。そして、自車両の周囲に制御対象車両の存在を認識すると、自車両は、制御中の協調走行制御の制御内容を変更したり、中止する。
【0028】
(1)前方車両への追従運転走行制御における協調走行制御
前方車両が車々間通信可能な車両であることを認識すると、後方車両である自車両は、車々間通信で受信した前方車両の車速、走行車線、進路変更指示などに基づいて所定の条件が判定されると、追従運転走行制御を行う。所定条件は、前方車両が自車両と同一の走行車線を走行していること、前方車両から進路変更指示を受信していないことである。このような条件が判定されると、前方車両の車速で走行するように、スロットル装置やブレーキ装置を駆動制御する。追従運転走行制御中に制御対象車両を認識すると、たとえば、追従走行中の車間距離を長く設定したり、協調走行制御そのものを中止する。
【0029】
(2)地図連携車両制御で走行する前方車両と連携した協調走行制御
後方車両である自車両は、前方車両が車々間通信可能な車両であることを認識すると、車々間通信により前方車両の地図連携車両制御の制御内容を受信して、自車両も同様な地図連携車両制御を設定する。地図連携車両制御とは、たとえば、前方道路の曲率に応じて曲線路に進入する速度を制御するような制御であり、地図データから入手した前方道路の曲率が所定値以下であれば、曲線路進入速度を所定速度に制限する。この場合、前方車両が所定速度以上で走行してれば、曲線路へ進入する手前の所定距離地点でブレーキをかけ始めて進入速度を制限する。後方車両である自車両は、前方車両の地図連携車両制御の情報を受信して、前方車両と同様な地図連携車両制御を行う。自車両が前方車両の地図連携車両制御と協調した制御を行っている際、自車両周囲に制御対象車両を認識すると、自車両の進入速度制限値を、前方車両から受信する進入速度制限値よりも小さく設定する。あるいは、地図連携車制御そのものを中止する。
【0030】
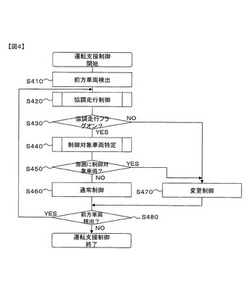
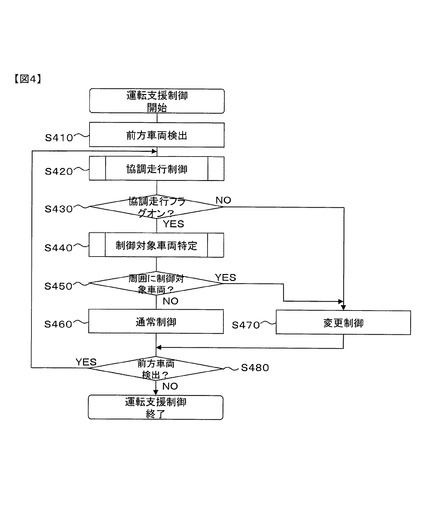
図4は、運転支援制御装置200のCPU210が実行する運転支援制御処理手順を示すフローチャートである。この手順は、CPU210内に予め記憶したプログラムを実行して行われる。
【0031】
ステップS410において、前方車両を検出し、ステップS420において、協調走行制御処理を実行してステップS430に進む。ステップS430では、協調走行フラグがオンであるか否かを判定する。ステップS430にて否定判定された場合、ステップS470にて後述する運転支援制御の変更制御を実行する。
【0032】
ステップS430にて肯定判定された場合、ステップS440において、サブルーチン「制御対象車両特定」が実行される。ステップS450では、自車両300の周囲の所定の範囲に制御対象車両が存在するか否かを判定する。所定の範囲とは、たとえば、補助記憶装置240に格納されている道路地図データに基づき、自車両300を中心としてディスプレイモジュール250に表示される道路地図画面の範囲である。なお、表示中の地図の縮尺に拘わらず自車両周囲の範囲を絶対距離で規定することが好ましい。
【0033】
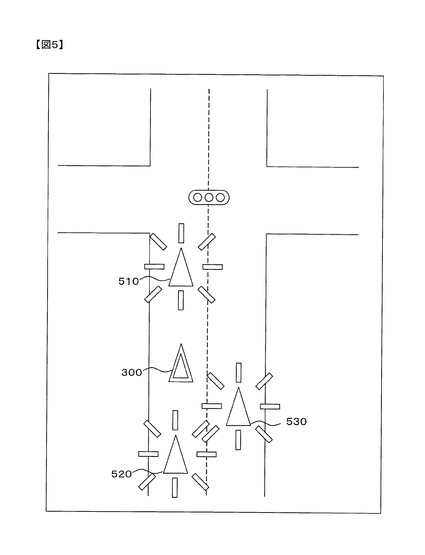
ステップS450にて肯定判定された場合、ステップS470にて運転支援変更制御を実行する。具体的には、たとえば、道路地図画面上に自車両300および他車両のアイコンを全て表示した上で、制御対象車両のアイコンを強調表示する。図5にその一例を示す。図5は、自車両300の前方、後方、および側方を走行する他車両510〜530が全て制御対象車両である場合を示している。他車両510〜530のアイコンはいずれも周囲に比べて視認性の高い強調処理が施されている。さらに点滅させるというようなエフェクトを与えても良い。
【0034】
このとき、協調走行制御の制御内容も変更する。例えば、前方車両に追従走行している際に制御対象車両が検出された場合、前方車両に追従する際の車間距離を長くする。前方車両の地図連携運転制御と同様の協調運転を行っている場合は、曲線路進入速度の制限値を低くする。また、監視装置270が、前方車両が制御対象車両ではないことを検出した場合は、追従走行を中止する。さらには、そうした変更制御内容を、画面表示または音声出力によって早期に運転者へ報知することが好ましい。
【0035】
ステップS450にて否定判定された場合、ステップS460において、通常制御が実行される。具体的には、たとえば、道路地図画面上に自車両300および他車両のアイコンを全て表示するが、強調表示は行わない。協調走行制御の制御内容も変更されない。ステップS480では前方車両検出が未だされているか否かを判定し、肯定判定の場合は処理をステップS420へ戻し、否定判定の場合、本処理手順は終了する。
【0036】
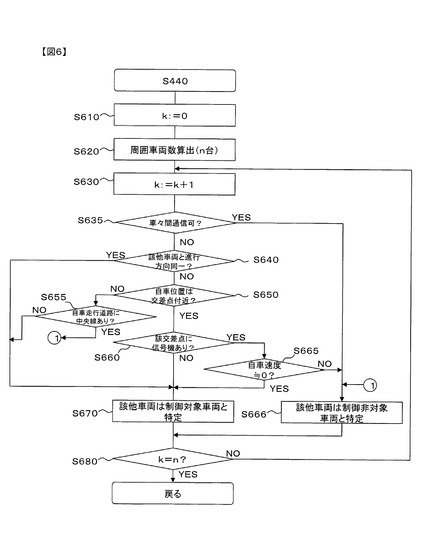
図6は、サブルーチン「制御対象車両特定」の内容を示すフローチャートであり、図3を用いて説明した制御処理の概要を具体化して示すものである。ステップS610ではカウンタkをリセットする。ステップS620では、上述した自車両300の周囲の所定の範囲に、何台の車両が位置しているかを計数し、計数結果をn[台]とする。以下の処理手順では、それらn台の車両の各々が、制御対象車両であるか制御非対象車両であるかを判定する。
【0037】
ステップS630では、カウンタkを1だけインクリメントし、n台の車両のうちのk台目に着目する。ステップS640では、k台目の車両と自車両300との進行方向が同一であるか否かを判定する。肯定判定の場合、ステップS670にてk台目の車両は制御対象車両であるとして特定される。否定判定の場合、ステップS650において、自車両300の現在位置が交差点付近であるか否かを判定する。自車両の現在位置は、上述したように、現在地検出装置220によって検出される。交差点の位置は、補助記憶装置240に格納される道路地図データに含まれる上述したノードデータによって特定される。
【0038】
ステップS650において、否定判定の場合は、ステップS655にて自車両300が走行している道路に中央線があるか否かを判定する。中央線の有無は、補助記憶装置240に格納される道路地図データに含まれる上述したリンクデータによって特定される。ステップS655にて否定判定の場合、ステップS670にてk台目の車両は制御対象車両であるとして特定される。ステップS655にて肯定判定の場合、ステップS666にてk台目の車両は制御非対象車両であるとして特定される。
【0039】
ステップS650において、肯定判定の場合は、ステップS660にてその交差点に信号機が設定されているか否かを判定する。信号機の有無は、補助記憶装置240に格納される道路地図データに含まれる上述したノードデータによって特定される。否定判定の場合、ステップS670にてk台目の車両は制御対象車両であるとして特定される。肯定判定の場合、ステップS665にて自車両300の速度がほぼ0であるか否かを判定する。否定判定の場合、ステップS666にてk台目の車両は制御非対象車両であるとして特定される。肯定判定の場合、ステップS670にてk台目の車両は制御対象車両であるとして特定される。ステップS680において、n台の車両の全てについて、制御対象車両であるか制御非対象車両であるかの判定を終了したと判定されると、本処理手順は終了し、ステップS680が否定された場合は、処理をステップS630へ戻す。
【0040】
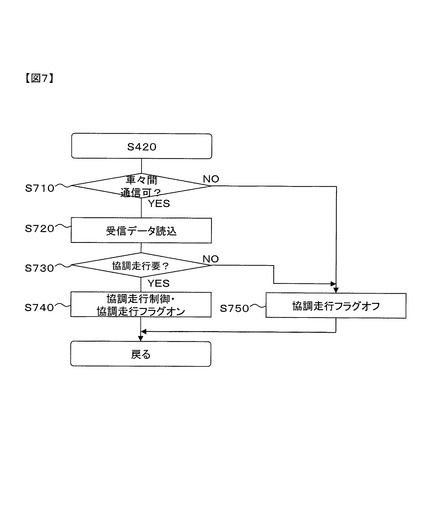
図7は、サブルーチン「協調走行制御」の内容を示すフローチャートである。ステップS710において、前方車両が車々間通信可能な車両であるか否かを判定する。ステップS710において、車々間通信可能な車両であると判定すると、ステップS720に進み、車々間通信で受信した前方車両の車速、走行車線、進路変更指示などのデータを読み込み、ステップS730において、協調走行の要否を判定する。協調走行は、前方車両が自車両と同一の走行車線を走行していること、前方車両から進路変更指示を受信していないことを条件として行われる。協調走行要と判定すると、ステップS740に進み、前方車両の車速で走行するように、スロットル装置やブレーキ装置を駆動制御する。これにより、自車両は前方車両と協調して走行する。また、併せて、図4のステップS460で上述した通常制御が実行されるように、協調走行フラグをオンにする。
【0041】
ステップS710において、前方車両が車々間通信可能な車両でないと判定された場合、および。ステップS730において、協調走行不要と判定された場合は、図4のステップS470で上述した運転支援変更制御が実行されるように、ステップS750に進み、協調走行フラグをオフにする。
【0042】
以上で説明した実施の形態の車両制御装置10は、以下の作用効果を奏する。
(1)自車両は、自車両周囲の移動体のうち、車々間通信を行うことができる移動体(以下、第1の移動体)と協調して走行するように運転制御を行う。車々間通信できない移動体(第2の移動体)のうち、自車両への接近によって自車両の運転制御が変更される可能性が高い移動体を特定移動体として特定する。上記運転制御によって自車両が第1の移動体と協調走行している際、上記特定移動体が特定されると、運転制御の変更を報知するようにした。したがって、協調走行が解除されたことを認識できる。
【0043】
(2)自車両周囲の移動体の地図上の位置と、自車両の地図上の位置と、車々間通信可能か否かの判定結果とに基づいて、自車両、車々間通信可能な他車両、および車々間通信できない他車両をそれぞれ異なった態様で表すアイコンを道路地図上に表示するようにした。したがって、自車両周囲の移動体のうち、車々間通信し得ない車両を画面内で容易に確認することができ、運転者の負担を低減できる。
【0044】
(3)運転制御の変更を報知する時、自車両、車々間通信可能な他車両、および車々間通信できない他車両をそれぞれ異なった態様で表すアイコンを道路地図上に表示するようにした。したがって、運転制御が変更された原因となる第2の移動体をタイミングよく表示することができる。
【0045】
(4)特定移動体を示すアイコンを強調して表示するようにすれば、車々間通信し得ない他車両であって自車両に接近する車両を画面内で容易に確認することができ、より一層、運転者の負担を低減できる。
(5)特定移動体が特定されると協調走行を中止するようにした。したがって、運転者の意志で自車両を操作できるので、安全回避動などを迅速に行うことができる。
【0046】
−−−変形例−−−
以上で説明した実施の形態の車両制御装置10を、次のように変形することもできる。
(1)上述の図4におけるステップS470においては、道路地図画面上に自車両300および他車両のアイコンを全て表示することとした。しかし、交通量の多い場合に他車両のアイコンが無数に表示されることを防止するため、複数の他車両をまとめて1個の車群のアイコンとして表示するようにしても良い。あるいは、自車両300に最も近い他車両を代表して表示するようにしても良い。
【0047】
(2)車々間通信により他車両と協調走行を行っているときに、車々間通信できない他車両の接近により協調走行を変更する可能性が高いこと報知する一例として、そのような協調走行に影響を与える他車両(影響車両)を画面表示として報知するようにした。しかし、音声により報知してもよい。その際、上記のような影響車両のアイコンを、自車両のアイコン、車々間通信可能な他車両のアイコンに比べて強調して表示したが、音声で報知する場合は、強調表示しなくてもよい。
【0048】
(3)協調走行の内容は、追従走行や地図連携走行に限定されることはない。
(4)自車両周囲の他車両を検出する監視装置270は、レーザレーダやカメラ以外のセンサを使用してもよい。
【0049】
(5)上述の本実施の形態および変形例の説明では、本発明を車両制御装置10に適用した実施の形態を説明したが、車両制御装置10に含まれる運転支援制御装置200は、脱着可能なモジュールとしても良い。運転支援制御装置200は、たとえば、カーナビゲーション、PND(Personal Navigation Device)に無線通信モジュール260および監視装置270を取り付けた装置であっても良い。
【0050】
上述した各実施の形態および各変形例は、それぞれ組み合わせてもよい。また、本発明の特徴的な機能を損なわない限り、本発明は、上述した実施の形態における機器構成に何ら限定されない。
【符号の説明】
【0051】
10 車両制御装置 100 ECU
150 駆動制御装置 200 運転支援制御装置
210 CPU 215 主記憶装置
220 現在地検出装置 230 ユーザ入力装置
240 補助記憶装置 250 ディスプレイモジュール
255 スピーカ 260 無線通信モジュール
270 監視装置 300 自車両
310 前方の他車両 320 後方の他車両
330 側方の他車両 340 対向の他車両
350 駐車中の他車両 360 人
510、520、530 他車両
【技術分野】
【0001】
本発明は、車両の走行支援制御を行う車両制御装置に関する。
【背景技術】
【0002】
カメラやレーダ等の監視装置および車々間通信によって自車両近傍の他車両の走行状況や、位置関係等に関する情報を取得し、他車両と連携して車両事故を防止するように自車両の走行支援制御を行う車両制御装置が開示されている(たとえば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−62912号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されている発明によると、車々間通信装置を搭載した他車両と協調した走行支援制御(協調走行制御)を行うことができるが、車々間通信装置を搭載しない他車両の存在を考慮していない。
【課題を解決するための手段】
【0005】
本発明による車両制御装置は、地図上の自車両の位置を検出する自車両位置検出手段と、自車両周囲の移動体を検出する周囲車両検出手段と、自車両周囲の移動体と車々間通信を行う車々間通信手段と、周囲車両検出手段で検出された自車両周囲の移動体のうち、車々間通信手段による通信を行うことができる移動体(以下、第1の移動体)と、車々間通信手段による通信を行うことができない移動体(以下、第2の移動体)とを弁別する弁別手段と、車々間通信手段で授受した各種情報に基づいて、自車両が第1の移動体と協調走行するように運転制御を行う運転制御手段と、第2の移動体のうち、自車両への接近によって協調走行のための運転制御を変更する必要のある移動体を特定移動体として特定する特定手段と、第1の移動体と協調した走行を行うように運転制御手段が運転制御を行っている際、特定移動体が特定されると、運転制御手段による運転制御が変更されることを報知する報知手段とを備え、運転制御手段は、特定手段で特定移動体が特定されると、協調走行のための運転制御を変更することを特徴とする。
【発明の効果】
【0006】
本発明による車両制御装置によれば、車々間通信装置を搭載しない車両周囲の移動体のうち、自車両に接近して自車両の協調走行制御を変更するおそれのある移動体を正確に特定して運転者に報知することができる。
【図面の簡単な説明】
【0007】
【図1】本実施の形態の車両制御装置10の構成を示す図。
【図2】運転支援制御装置200の構成を示す図。
【図3】本発明の一実施の形態における制御処理の概要を説明するための図。
【図4】案内出力制御処理手順を示すフローチャート。
【図5】制御対象車両のアイコンを強調表示した一例を示す図。
【図6】サブルーチン「制御対象車両特定」の内容を示すフローチャート。
【図7】サブルーチン「協調走行制御」の内容を示すフローチャート。
【発明を実施するための形態】
【0008】
図1〜図7を参照して、本発明による車両制御装置の一実施の形態を説明する。図1は、本実施の形態の車両制御装置10の構成を示す図である。
【0009】
図1に示す車両制御装置10は、互いにバスで接続されるECU(Electronic Control Unit)100と、駆動制御装置150と、運転支援制御装置200とを含んで構成される。ECU100は、車両を電子制御するためのマイクロコンピュータを有する主制御装置である。駆動制御装置150は、たとえば、操舵装置の操舵反力付与装置、アクセル装置のスロットル装置やペダル反力付与装置、ブレーキランプ装置、警音装置を含む。運転支援制御装置200は、ECU100との間で各種情報を授受して駆動制御装置150を制御することにより、自車両の走行支援制御を行う。駆動制御装置150は運転者の操作によっても駆動制御される。
【0010】
図2は、運転支援制御装置200の構成を示す図である。CPU210は運転支援制御装置200全体を制御する演算処理装置であり、CPU210およびその周辺装置は互いにバスで接続されている。周辺装置は、主記憶装置215、補助記憶装置240、ディスプレイモジュール250、スピーカ255、無線通信モジュール260、およびレーザレーダやカメラに代表される周囲状況の監視装置270を含む。主記憶装置215は、CPU210の作業エリアであるワークメモリや制御プログラムが格納されているプログラムメモリを有する。
【0011】
CPU210においては、現在地検出装置220およびユーザ入力装置230からの信号が入力される。現在地検出装置220は、たとえば、GPSセンサ、ジャイロセンサ、および車速センサである。ユーザ入力装置230は、たとえば、タッチパネル、パネル周辺の押ボタン式スイッチ、リモコン、およびジョイスティックである。
【0012】
補助記憶装置240は、道路地図データやPOI(Point Of Interest:観光地や各種施設)情報を格納する記憶装置である。補助記憶装置240としては、たとえば、ハードディスクドライブのほか、道路地図データが格納されたCDやDVD、フラッシュメモリ、その他の記録媒体、およびその読み出し装置であっても良い。
【0013】
道路地図データにおいては、一本の道路は、交差点などをノードとして定義し、ノード間をリンクとして定義することによって、リンク列データとして表される。したがって、リンク列データは、ノードデータおよびリンクデータから構成される。道路地図データは、ノードデータとリンクデータとが、メッシュコードとともにメッシュ領域単位で分類して格納されている。メッシュ領域とは、道路地図を所定範囲毎に区分けしたときの区分けされた各領域をいう。メッシュコードの記憶領域には、メッシュ領域を識別する番号が格納されている。リンク列データの記憶領域には、ノードの位置座標と、ノード間のリンクを表すリンク番号と、リンクをさらに短く分割する補間点の位置座標とが格納されている。これらの位置座標が地図表示やロケータ処理の形状データとして用いられる。
【0014】
ディスプレイモジュール250は、CPU210から出力される文字や図形を含む画像データに基づいて画面表示し、スピーカ255は、CPU210から出力される音声データに基づいて発声する。無線通信モジュール260は、アンテナを介して他車両との車々間無線通信を行うために用いられる。監視装置270は、自車両周囲の他車両の走行状況や、位置関係等に関する情報を取得するために用いられる。
【0015】
図3は、本実施の形態における制御処理の概要を説明するための図である。図3においては、自車両300が片側2車線ずつで対向する幹線道路の左車線を走行しており、自車両300に対し、前方の他車両310、後方の他車両320、側方の他車両330が、自車両300と同一方向に走行している。ただし、側方の他車両330は、自車両300が走行する車線と隣接する車線を走行している。
【0016】
自車両300は、自車両と同一方向に走行している他車両310〜330との間で車々間通信ができない場合、すなわち、他車両310〜330が車々間通信装置を搭載していない場合、他車両310〜330の挙動の予測困難性を考慮した自車両300の協調走行制御を行う必要がある。車々間通信できない他車両のうち、同一方向に走行している車両は、自車両に接近する可能性が高いので、こうした車両を以下では、「制御対象車両」と呼び、表示画面上で他の車両よりも強調して表示する。
【0017】
一方、対向する他車両340は、車々間通信機能を有していない場合であっても、自車両300とは異なる対向車線上に位置するため、自車両300に接近する可能性がなく、その挙動の予測困難性を考慮する必要が無い。こうした車両を以下では、「制御非対象車両」と呼ぶ。
【0018】
なお、対向する他車両340が、自車両300との関係において、中央線の無い細道路(対向一車線の道路)に対向する関係であったならば、車々間通信機能を有していない限りにおいて、その挙動の予測困難性を考慮する必要がある。したがって、その場合は、対向の他車両340は、制御対象車両に該当することとする。
【0019】
また、車々間通信機能を有している他車両は、対向一車線の道路を走行中であるか、対向2車線の道路を走行中であるかに拘わらず、自車両300との関係において、その挙動の予測困難性を考慮する必要が無いため、常に制御非対象車両に該当する。すなわち、自車両は、車々間通信によって他車両の走行状況を受信しているので、それらの走行状況を運転者に報知すれば、自車両の運転者は、前方車両、後方車両、あるいは側方車両の挙動を予測した運転を行うことができる。
【0020】
自車両周囲の他車両のうち車々間通信できない車両を特定する方法について説明する。
自車両の位置は、現在地検出装置220で検出される。現在地検出装置200は、GPSセンサを含み、GPSセンサで受信したGPS信号に基づいて自車両の地図上の位置を検出する。他車両の位置は、監視装置270で自車両周囲の他車両を検出し、検出した他車両の位置を自車両に対する相対位置として算出し、算出された相対位置と自車両の地図上の位置とに基づいて他車両の地図上の位置を演算する。これにより、自車両、および自車両周囲の他車両をそれぞれ示すアイコンをディスプレイモジュール250の画面上に表示することができる。
【0021】
運転支援制御装置200は、車々間通信装置を搭載した他車両との間で車々間通信を行い、他車両の位置情報(緯度、経度データ)、車速データなどを入手する。入手した位置情報に基づいて、表示画面上にアイコンで表示された他車両のうち、位置情報を受信した他車両を特定することができる。位置情報を受信した他車両が車々間通信可能な他車両であり、それ以外の他車両が車々間通信装置を搭載しない車両である。この実施の形態では、車々間通信装置を搭載しない他車両が検出されると、後述する協調走行制御の制御内容を変更し、あるいは、協調走行制御を中止する。
【0022】
図3を参照して、制御対象車両、制御非対象車両の弁別について説明する。図3に示す交差点には、信号機が設置されている。信号機の設置された交差点に、自車両300が所定値以上の速度で直進方向に進入する場合は、左右に交差する道路上の他車両は、その交差点に進入しないため、その挙動の予測困難性を考慮する必要が無く、制御非対象車両に該当する。また、対向車線上の他車両は、直進および左折の場合は自車両300に影響は無く、右折の場合は一旦停車するため、やはりその挙動の予測困難性を考慮する必要が無く、制御非対象車両に該当する。しかし、自車両300がその交差点で速度がほぼ0となる場合も考えられる。例えば、その交差点で右左折する場合、あるいは信号待ちで停車する場合である。そのような場合は、交差する道路上の他車両は、制御対象車両に該当することになる。
【0023】
図3には、自車両300と同一車線上に位置している駐車中の他車両350を示している。駐車車両は走行しないため、その挙動の予測困難性を考慮する必要が無く、したがって、駐車中の他車両350は制御非対象車両に該当する。
【0024】
図3においては、人360が交差点付近に位置している。人360についても、自車両300との関係において、他車両310〜350と同様に定義することにより、他車両とみなすことができる。以下では、他車両310〜350は人360をも含むものとする。
【0025】
信号機が設置されていない交差点に自車両300が進入する場合は、交差するいずれの道路上においても、他車両が車々間通信機能を有していない限りにおいては、その挙動の予測困難性を考慮する必要がある。したがって、その場合は、いずれの他車両も制御対象車両に該当することとする。
【0026】
また、交差点付近でない場合、中央線がある道路を走行中の自車両の周囲に位置する他車両については、車々間通信装置を搭載していなければ、自車両と異なる方向に走行する車両は制御非対象車両と認識し、同一方向に走行する車両は制御対象車両と認識する。中央線がない道路を走行中の自車両の周囲に位置する他車両については、走行方向に関係なく車々間通信装置を搭載していなければ制御非対象車両と認識する。いずれの道路においても、自車両の周囲に位置する他車両は、車々間通信装置を搭載していれば、制御非対象車両と認識する。
【0027】
この実施の形態による車両制御装置では、車々間通信で授受する情報に基づいて、前方車両に追従走行する追従運転走行制御や、前方道路の曲率に応じて進入速度を制御するいわゆる地図連動車両制御のような協調走行制御も行う。そして、自車両の周囲に制御対象車両の存在を認識すると、自車両は、制御中の協調走行制御の制御内容を変更したり、中止する。
【0028】
(1)前方車両への追従運転走行制御における協調走行制御
前方車両が車々間通信可能な車両であることを認識すると、後方車両である自車両は、車々間通信で受信した前方車両の車速、走行車線、進路変更指示などに基づいて所定の条件が判定されると、追従運転走行制御を行う。所定条件は、前方車両が自車両と同一の走行車線を走行していること、前方車両から進路変更指示を受信していないことである。このような条件が判定されると、前方車両の車速で走行するように、スロットル装置やブレーキ装置を駆動制御する。追従運転走行制御中に制御対象車両を認識すると、たとえば、追従走行中の車間距離を長く設定したり、協調走行制御そのものを中止する。
【0029】
(2)地図連携車両制御で走行する前方車両と連携した協調走行制御
後方車両である自車両は、前方車両が車々間通信可能な車両であることを認識すると、車々間通信により前方車両の地図連携車両制御の制御内容を受信して、自車両も同様な地図連携車両制御を設定する。地図連携車両制御とは、たとえば、前方道路の曲率に応じて曲線路に進入する速度を制御するような制御であり、地図データから入手した前方道路の曲率が所定値以下であれば、曲線路進入速度を所定速度に制限する。この場合、前方車両が所定速度以上で走行してれば、曲線路へ進入する手前の所定距離地点でブレーキをかけ始めて進入速度を制限する。後方車両である自車両は、前方車両の地図連携車両制御の情報を受信して、前方車両と同様な地図連携車両制御を行う。自車両が前方車両の地図連携車両制御と協調した制御を行っている際、自車両周囲に制御対象車両を認識すると、自車両の進入速度制限値を、前方車両から受信する進入速度制限値よりも小さく設定する。あるいは、地図連携車制御そのものを中止する。
【0030】
図4は、運転支援制御装置200のCPU210が実行する運転支援制御処理手順を示すフローチャートである。この手順は、CPU210内に予め記憶したプログラムを実行して行われる。
【0031】
ステップS410において、前方車両を検出し、ステップS420において、協調走行制御処理を実行してステップS430に進む。ステップS430では、協調走行フラグがオンであるか否かを判定する。ステップS430にて否定判定された場合、ステップS470にて後述する運転支援制御の変更制御を実行する。
【0032】
ステップS430にて肯定判定された場合、ステップS440において、サブルーチン「制御対象車両特定」が実行される。ステップS450では、自車両300の周囲の所定の範囲に制御対象車両が存在するか否かを判定する。所定の範囲とは、たとえば、補助記憶装置240に格納されている道路地図データに基づき、自車両300を中心としてディスプレイモジュール250に表示される道路地図画面の範囲である。なお、表示中の地図の縮尺に拘わらず自車両周囲の範囲を絶対距離で規定することが好ましい。
【0033】
ステップS450にて肯定判定された場合、ステップS470にて運転支援変更制御を実行する。具体的には、たとえば、道路地図画面上に自車両300および他車両のアイコンを全て表示した上で、制御対象車両のアイコンを強調表示する。図5にその一例を示す。図5は、自車両300の前方、後方、および側方を走行する他車両510〜530が全て制御対象車両である場合を示している。他車両510〜530のアイコンはいずれも周囲に比べて視認性の高い強調処理が施されている。さらに点滅させるというようなエフェクトを与えても良い。
【0034】
このとき、協調走行制御の制御内容も変更する。例えば、前方車両に追従走行している際に制御対象車両が検出された場合、前方車両に追従する際の車間距離を長くする。前方車両の地図連携運転制御と同様の協調運転を行っている場合は、曲線路進入速度の制限値を低くする。また、監視装置270が、前方車両が制御対象車両ではないことを検出した場合は、追従走行を中止する。さらには、そうした変更制御内容を、画面表示または音声出力によって早期に運転者へ報知することが好ましい。
【0035】
ステップS450にて否定判定された場合、ステップS460において、通常制御が実行される。具体的には、たとえば、道路地図画面上に自車両300および他車両のアイコンを全て表示するが、強調表示は行わない。協調走行制御の制御内容も変更されない。ステップS480では前方車両検出が未だされているか否かを判定し、肯定判定の場合は処理をステップS420へ戻し、否定判定の場合、本処理手順は終了する。
【0036】
図6は、サブルーチン「制御対象車両特定」の内容を示すフローチャートであり、図3を用いて説明した制御処理の概要を具体化して示すものである。ステップS610ではカウンタkをリセットする。ステップS620では、上述した自車両300の周囲の所定の範囲に、何台の車両が位置しているかを計数し、計数結果をn[台]とする。以下の処理手順では、それらn台の車両の各々が、制御対象車両であるか制御非対象車両であるかを判定する。
【0037】
ステップS630では、カウンタkを1だけインクリメントし、n台の車両のうちのk台目に着目する。ステップS640では、k台目の車両と自車両300との進行方向が同一であるか否かを判定する。肯定判定の場合、ステップS670にてk台目の車両は制御対象車両であるとして特定される。否定判定の場合、ステップS650において、自車両300の現在位置が交差点付近であるか否かを判定する。自車両の現在位置は、上述したように、現在地検出装置220によって検出される。交差点の位置は、補助記憶装置240に格納される道路地図データに含まれる上述したノードデータによって特定される。
【0038】
ステップS650において、否定判定の場合は、ステップS655にて自車両300が走行している道路に中央線があるか否かを判定する。中央線の有無は、補助記憶装置240に格納される道路地図データに含まれる上述したリンクデータによって特定される。ステップS655にて否定判定の場合、ステップS670にてk台目の車両は制御対象車両であるとして特定される。ステップS655にて肯定判定の場合、ステップS666にてk台目の車両は制御非対象車両であるとして特定される。
【0039】
ステップS650において、肯定判定の場合は、ステップS660にてその交差点に信号機が設定されているか否かを判定する。信号機の有無は、補助記憶装置240に格納される道路地図データに含まれる上述したノードデータによって特定される。否定判定の場合、ステップS670にてk台目の車両は制御対象車両であるとして特定される。肯定判定の場合、ステップS665にて自車両300の速度がほぼ0であるか否かを判定する。否定判定の場合、ステップS666にてk台目の車両は制御非対象車両であるとして特定される。肯定判定の場合、ステップS670にてk台目の車両は制御対象車両であるとして特定される。ステップS680において、n台の車両の全てについて、制御対象車両であるか制御非対象車両であるかの判定を終了したと判定されると、本処理手順は終了し、ステップS680が否定された場合は、処理をステップS630へ戻す。
【0040】
図7は、サブルーチン「協調走行制御」の内容を示すフローチャートである。ステップS710において、前方車両が車々間通信可能な車両であるか否かを判定する。ステップS710において、車々間通信可能な車両であると判定すると、ステップS720に進み、車々間通信で受信した前方車両の車速、走行車線、進路変更指示などのデータを読み込み、ステップS730において、協調走行の要否を判定する。協調走行は、前方車両が自車両と同一の走行車線を走行していること、前方車両から進路変更指示を受信していないことを条件として行われる。協調走行要と判定すると、ステップS740に進み、前方車両の車速で走行するように、スロットル装置やブレーキ装置を駆動制御する。これにより、自車両は前方車両と協調して走行する。また、併せて、図4のステップS460で上述した通常制御が実行されるように、協調走行フラグをオンにする。
【0041】
ステップS710において、前方車両が車々間通信可能な車両でないと判定された場合、および。ステップS730において、協調走行不要と判定された場合は、図4のステップS470で上述した運転支援変更制御が実行されるように、ステップS750に進み、協調走行フラグをオフにする。
【0042】
以上で説明した実施の形態の車両制御装置10は、以下の作用効果を奏する。
(1)自車両は、自車両周囲の移動体のうち、車々間通信を行うことができる移動体(以下、第1の移動体)と協調して走行するように運転制御を行う。車々間通信できない移動体(第2の移動体)のうち、自車両への接近によって自車両の運転制御が変更される可能性が高い移動体を特定移動体として特定する。上記運転制御によって自車両が第1の移動体と協調走行している際、上記特定移動体が特定されると、運転制御の変更を報知するようにした。したがって、協調走行が解除されたことを認識できる。
【0043】
(2)自車両周囲の移動体の地図上の位置と、自車両の地図上の位置と、車々間通信可能か否かの判定結果とに基づいて、自車両、車々間通信可能な他車両、および車々間通信できない他車両をそれぞれ異なった態様で表すアイコンを道路地図上に表示するようにした。したがって、自車両周囲の移動体のうち、車々間通信し得ない車両を画面内で容易に確認することができ、運転者の負担を低減できる。
【0044】
(3)運転制御の変更を報知する時、自車両、車々間通信可能な他車両、および車々間通信できない他車両をそれぞれ異なった態様で表すアイコンを道路地図上に表示するようにした。したがって、運転制御が変更された原因となる第2の移動体をタイミングよく表示することができる。
【0045】
(4)特定移動体を示すアイコンを強調して表示するようにすれば、車々間通信し得ない他車両であって自車両に接近する車両を画面内で容易に確認することができ、より一層、運転者の負担を低減できる。
(5)特定移動体が特定されると協調走行を中止するようにした。したがって、運転者の意志で自車両を操作できるので、安全回避動などを迅速に行うことができる。
【0046】
−−−変形例−−−
以上で説明した実施の形態の車両制御装置10を、次のように変形することもできる。
(1)上述の図4におけるステップS470においては、道路地図画面上に自車両300および他車両のアイコンを全て表示することとした。しかし、交通量の多い場合に他車両のアイコンが無数に表示されることを防止するため、複数の他車両をまとめて1個の車群のアイコンとして表示するようにしても良い。あるいは、自車両300に最も近い他車両を代表して表示するようにしても良い。
【0047】
(2)車々間通信により他車両と協調走行を行っているときに、車々間通信できない他車両の接近により協調走行を変更する可能性が高いこと報知する一例として、そのような協調走行に影響を与える他車両(影響車両)を画面表示として報知するようにした。しかし、音声により報知してもよい。その際、上記のような影響車両のアイコンを、自車両のアイコン、車々間通信可能な他車両のアイコンに比べて強調して表示したが、音声で報知する場合は、強調表示しなくてもよい。
【0048】
(3)協調走行の内容は、追従走行や地図連携走行に限定されることはない。
(4)自車両周囲の他車両を検出する監視装置270は、レーザレーダやカメラ以外のセンサを使用してもよい。
【0049】
(5)上述の本実施の形態および変形例の説明では、本発明を車両制御装置10に適用した実施の形態を説明したが、車両制御装置10に含まれる運転支援制御装置200は、脱着可能なモジュールとしても良い。運転支援制御装置200は、たとえば、カーナビゲーション、PND(Personal Navigation Device)に無線通信モジュール260および監視装置270を取り付けた装置であっても良い。
【0050】
上述した各実施の形態および各変形例は、それぞれ組み合わせてもよい。また、本発明の特徴的な機能を損なわない限り、本発明は、上述した実施の形態における機器構成に何ら限定されない。
【符号の説明】
【0051】
10 車両制御装置 100 ECU
150 駆動制御装置 200 運転支援制御装置
210 CPU 215 主記憶装置
220 現在地検出装置 230 ユーザ入力装置
240 補助記憶装置 250 ディスプレイモジュール
255 スピーカ 260 無線通信モジュール
270 監視装置 300 自車両
310 前方の他車両 320 後方の他車両
330 側方の他車両 340 対向の他車両
350 駐車中の他車両 360 人
510、520、530 他車両
【特許請求の範囲】
【請求項1】
地図上の自車両の位置を検出する自車両位置検出手段と、
前記自車両周囲の移動体を検出する周囲車両検出手段と、
前記自車両周囲の移動体と車々間通信を行う車々間通信手段と、
前記周囲車両検出手段で検出された前記自車両周囲の移動体のうち、前記車々間通信手段による通信を行うことができる移動体(以下、第1の移動体)と、前記車々間通信手段による通信を行うことができない移動体(以下、第2の移動体)とを弁別する弁別手段と、
前記車々間通信手段で授受した各種情報に基づいて、前記自車両が前記第1の移動体と協調走行するように運転制御を行う運転制御手段と、
前記第2の移動体のうち、前記自車両への接近によって前記協調走行のための前記運転制御を変更する必要のある移動体を特定移動体として特定する特定手段と、
前記第1の移動体と協調した走行を行うように前記運転制御手段が前記運転制御を行っている際、前記特定移動体が特定されると、前記運転制御手段による前記運転制御が変更されることを報知する報知手段とを備えることを特徴とする車両制御装置
【請求項2】
請求項1に記載の車両制御装置において、
前記周囲車両検出手段で検出した移動体の地図上の位置を演算する位置演算手段と、
前記位置演算手段で演算した前記移動体の地図上の位置と、前記自車両位置検出手段で検出した前記自車両の地図上の位置と、前記弁別手段の弁別結果とに基づいて、前記自車両、前記第1および第2の移動体をそれぞれ異なった表示態様で示すアイコンを道路地図上に表示する表示制御手段とをさらに備えることを特徴とする車両制御装置。
【請求項3】
請求項1に記載の車両制御装置において、
前記周囲車両検出手段で検出した移動体の地図上の位置を演算する位置演算手段と、
前記報知手段によって前記運転制御の変更を報知する時、前記位置演算手段で演算した前記移動体の地図上の位置と、前記自車両位置検出手段で検出した前記自車両の地図上の位置と、前記弁別手段の弁別結果とに基づいて、前記自車両、前記第1および第2の移動体をそれぞれ異なった表示態様で示すアイコンを道路地図上に表示する表示制御手段とをさらに備えることを特徴とする車両制御装置。
【請求項4】
請求項2または3に記載の車両制御装置において、
前記表示制御手段は、前記第2の移動体を示すアイコンのうち前記特定移動体を示すアイコンを強調して表示することを特徴とする車両制御装置。
【請求項5】
請求項1乃至4のいずれか1項に記載の車両制御装置において、
前記特定手段は、前記周囲車両検出手段で検出した前記第2の移動体の位置の変化と、前記自車両位置検出手段で検出した前記自車両の地図上の位置とに基づいて、前記自車両に接近する前記第2の移動体の中から前記特定移動体を特定することを特徴とする車両制御装置。
【請求項6】
請求項1乃至5のいずれか1項に記載の車両制御装置において、
前記報知手段は、前記特定移動体が特定されると、前記運転制御手段による前記第1の移動体と協調した前記運転制御が中止されることを報知することを特徴とする車両制御装置。
【請求項7】
請求項1乃至6のいずれか1項に記載の車両制御装置において、
前記自車両位置検出手段はGPSセンサを含み、GPSセンサで受信したGPS信号に基づいて前記自車両の地図上の位置を検出し、
前記周囲車両検出手段は、レーダまたはカメラで前記自車両周囲の移動体を検出し、検出した移動体の位置を前記自車両に対する相対位置として算出し、
前記位置演算手段は、前記算出された相対位置と前記自車両の地図上の位置とに基づいて前記移動体の地図上の位置を演算することを特徴とする車両制御装置。
【請求項1】
地図上の自車両の位置を検出する自車両位置検出手段と、
前記自車両周囲の移動体を検出する周囲車両検出手段と、
前記自車両周囲の移動体と車々間通信を行う車々間通信手段と、
前記周囲車両検出手段で検出された前記自車両周囲の移動体のうち、前記車々間通信手段による通信を行うことができる移動体(以下、第1の移動体)と、前記車々間通信手段による通信を行うことができない移動体(以下、第2の移動体)とを弁別する弁別手段と、
前記車々間通信手段で授受した各種情報に基づいて、前記自車両が前記第1の移動体と協調走行するように運転制御を行う運転制御手段と、
前記第2の移動体のうち、前記自車両への接近によって前記協調走行のための前記運転制御を変更する必要のある移動体を特定移動体として特定する特定手段と、
前記第1の移動体と協調した走行を行うように前記運転制御手段が前記運転制御を行っている際、前記特定移動体が特定されると、前記運転制御手段による前記運転制御が変更されることを報知する報知手段とを備えることを特徴とする車両制御装置
【請求項2】
請求項1に記載の車両制御装置において、
前記周囲車両検出手段で検出した移動体の地図上の位置を演算する位置演算手段と、
前記位置演算手段で演算した前記移動体の地図上の位置と、前記自車両位置検出手段で検出した前記自車両の地図上の位置と、前記弁別手段の弁別結果とに基づいて、前記自車両、前記第1および第2の移動体をそれぞれ異なった表示態様で示すアイコンを道路地図上に表示する表示制御手段とをさらに備えることを特徴とする車両制御装置。
【請求項3】
請求項1に記載の車両制御装置において、
前記周囲車両検出手段で検出した移動体の地図上の位置を演算する位置演算手段と、
前記報知手段によって前記運転制御の変更を報知する時、前記位置演算手段で演算した前記移動体の地図上の位置と、前記自車両位置検出手段で検出した前記自車両の地図上の位置と、前記弁別手段の弁別結果とに基づいて、前記自車両、前記第1および第2の移動体をそれぞれ異なった表示態様で示すアイコンを道路地図上に表示する表示制御手段とをさらに備えることを特徴とする車両制御装置。
【請求項4】
請求項2または3に記載の車両制御装置において、
前記表示制御手段は、前記第2の移動体を示すアイコンのうち前記特定移動体を示すアイコンを強調して表示することを特徴とする車両制御装置。
【請求項5】
請求項1乃至4のいずれか1項に記載の車両制御装置において、
前記特定手段は、前記周囲車両検出手段で検出した前記第2の移動体の位置の変化と、前記自車両位置検出手段で検出した前記自車両の地図上の位置とに基づいて、前記自車両に接近する前記第2の移動体の中から前記特定移動体を特定することを特徴とする車両制御装置。
【請求項6】
請求項1乃至5のいずれか1項に記載の車両制御装置において、
前記報知手段は、前記特定移動体が特定されると、前記運転制御手段による前記第1の移動体と協調した前記運転制御が中止されることを報知することを特徴とする車両制御装置。
【請求項7】
請求項1乃至6のいずれか1項に記載の車両制御装置において、
前記自車両位置検出手段はGPSセンサを含み、GPSセンサで受信したGPS信号に基づいて前記自車両の地図上の位置を検出し、
前記周囲車両検出手段は、レーダまたはカメラで前記自車両周囲の移動体を検出し、検出した移動体の位置を前記自車両に対する相対位置として算出し、
前記位置演算手段は、前記算出された相対位置と前記自車両の地図上の位置とに基づいて前記移動体の地図上の位置を演算することを特徴とする車両制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−175368(P2011−175368A)
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願番号】特願2010−37582(P2010−37582)
【出願日】平成22年2月23日(2010.2.23)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願日】平成22年2月23日(2010.2.23)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]