
車両制御装置
【課題】 車間距離等の対象物との離間距離を計測する離間距離測定手段の測定結果に検知性能の低下や誤差が生じていても、離間距離を正しく認識して信頼性の高い車両制御が行える車両制御装置を提供する。
【解決手段】 車輪の回転速度を検出する回転検出装置1と、その出力信号から車両移動量を検出する車両移動量検出手段16とを設ける。車両と対象物との間の離間距離を非接触で計測するレーザレーダ等の離間距離測定手段14を設ける。離間距離測定手段14で検出された離間距離と車両移動量検出手段16で検出された車両移動量とを用いて車両の移動の制御を行う車両移動制御手段17を設ける。
【解決手段】 車輪の回転速度を検出する回転検出装置1と、その出力信号から車両移動量を検出する車両移動量検出手段16とを設ける。車両と対象物との間の離間距離を非接触で計測するレーザレーダ等の離間距離測定手段14を設ける。離間距離測定手段14で検出された離間距離と車両移動量検出手段16で検出された車両移動量とを用いて車両の移動の制御を行う車両移動制御手段17を設ける。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、自動車等の車両の自動運転、自動駐車や、走行支援、駐車支援等を行う車両制御装置に関する。
【背景技術】
【0002】
車間距離や、車両と路面の対象物等との距離を測定する手段として、レーザ光を用いた車間距離センサ(レーザレーダ)が知られている。その車間距離等の測定結果を用いて、自動運転や運転支援の車両制御が行われる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−271721号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、レーザ光を用いた車間距離センサでは、送受信部の汚れや、悪天候により検知性能が低下する。また、送受信部に対する対象物の角度や対象物の形状等によっても誤差が生じる。
【0005】
この発明の目的は、車間距離等の対象物との離間距離を計測する離間距離測定手段の測定結果に検知性能の低下や誤差が生じていても、離間距離を正しく認識して信頼性の高い車両制御が行える車両制御装置を提供することである。
【課題を解決するための手段】
【0006】
この発明の車両制御装置は、車輪21の回転速度を検出する回転検出装置1と、この回転検出装置1の出力する信号から車両20の移動量を検出する車両移動量検出手段16と、前記車両20とこの車両20から測定可能な位置にある対象物との間の離間距離を非接触で計測する離間距離測定手段14と、この離間距離測定手段14で検出された離間距離と前記車両移動量検出手段16で検出された車両移動量とを用いて車両20の移動の制御を行う車両移動制御手段17とを備える。
【0007】
この構成によると、車両移動制御手段17は、離間距離測定手段14の計測結果となる離間距離だけでなく、回転検出装置1および車両移動量検出手段16で検出される実際に移動した車両移動量を用いて車両20の制御を行う。そのため、離間距離測定手段14が、その送受信部の汚れや、悪天候により検知性能の低下を生じていたり、あるいは送受信部に対する対象物の角度や対象物の形状等により計測結果に誤差が生じていても、回転検出による車両移動量の併用により、精度良く車両制御を行うことができる。
【0008】
前記回転検出装置1は、高分解能であることが好ましい。例えば、前記回転検出装置1が、前記車輪21を支持する車輪用軸受装置10を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダ2と、このエンコーダ2の前記被検出極を検出するセンサ3と、このセンサ3の出力から前記被検出極の位相を逓倍する逓倍手段4とを有し、前記車両移動量検出手段17は、前記逓倍手段4で逓倍されたパルス出力から車両20の移動量を検出するものとしてもよい。
このように逓倍手段4を設けることで、エンコーダ2の検出極の配列ピッチよりも高分解能の回転検出が行える。高分解能の回転検出を行うことで、離間距離測定手段14による誤差を補える程度の車両の移動量検出が精度良く行える。また、回転検出装置1を車輪用軸受に装備することで、車両にコンパクトに、かつ組立工数の増加を抑えて、回転検出装置1の設置が行える。
なお、エンコーダ2が磁気エンコーダである場合、光学式に比べて汚れ等による検知性能の低下は生じ難いが、検出極の配列ピッチを細かくすることが難しい。しかし、上記のように逓倍手段4を設けることで、必要な高分解能を得ることができる。
【0009】
前記離間距離測定手段14は、光学的手法で対象物との間の離間距離を測定するものを用いることが好ましい。この種の離間距離測定手段14としては、例えばレーザレーダ等のレーザ光を用い車間距離センサが実用化され、また検出精度も良く、このような車間距離センサを用いることができる。
【0010】
この発明において、前記車両移動量検出手段16で検出した車両移動量と前記離間距離測定手段14で計測した離間距離とを比較として、前記離間距離測定手段14の計測値となる離間距離を校正する校正手段19を、前記車両移動制御手段17に設けても良い。
例えば、一定距離走行時の、前記回転検出装置1で検出し車両移動量検出手段16で求めた走行距離と、離間距離測定手段14で計測した走行距離(すなわち、距離測定開始時と終了時の対象物との距離の差)を比較することで、対象物との距離が実際にどれだけであるかを正確に求めることができる。前記校正手段19が行う、走行中の離間距離測定手段14で計測した離間距離と回転検出から求めた走行距離との比較の具体例を2つ挙げる。1つ目の例としては、校正を定期的に行い、固定物と車両との間で行われた直前の校正結果をそのまま利用する。離間距離測定手段14の汚れの状態が急激に変わらなければこの方法が可能である。2つ目の例は、車両の速度を故意的(機械的に)に変化をさせ、そのときの先行車両との離間距離測定手段14で計測した距離変化量と回転検出装置1(逓倍手段4を含む)で求めた距離変化量を比較し校正する方法である。車両の速度は回転検出装置1(逓倍手段4を用いてもよい)で見ることが可能であるので、時間と速度の変化の関係から、速度を変化させなかった場合の推定移動量と速度を変化させた場合の移動量の差を求めることが可能である。この距離を速度変化開始前と開始後の離間距離測定手段14で求めた距離変化量と比較することで校正が可能である。なお、回転検出に逓倍手段4を用いた場合、タイヤの極僅かな回転量を検出することができるので、速度変化量及び変化時間が少なくても校正が可能となる。また、先行車両の速度変化有無に関しては、校正後、校正時の自車の速度変化前の速度に戻し、そのときの先行車両との距離変化量が校正前と同一であれば、先行車両の速度変化は無いと推定する。
【0011】
前記校正手段19を設ける場合に、前記逓倍手段4を設けることが好ましい。例えば、前記回転検出装置1が、前記車輪20を支持する車輪用軸受装置10を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダ2と、このエンコーダ2の前記被検出極を検出するセンサ3と、このセンサ3の出力から前記被検出極の位相を逓倍する逓倍手段4とを有し、前記校正手段19は、前記逓倍手段4で逓倍されたパルス出力を用いて前記校正を行うものとする。
前記逓倍手段4を有する場合は、より一層正確に、車両移動量検出手段16で求めた走行距離と、離間距離測定手段14で計測した走行距離の差を求めることができる。
【0012】
この発明において、前記車両移動制御手段17は、前記離間距離測定手段14による離間距離の計測後に、車両制御を、前記回転検出装置1の検出する回転速度を用いて行うものとしても良い。
また、前記車両移動制御手段17は、前記離間距離測定手段14による離間距離の計測後に、車両制御を、前記離間距離測定手段で検出された離間距離を用いて行うものとしても良い。
いずれの場合も、前記離間距離測定手段14による離間距離の計測は、前記校正手段4を設けて校正することが好ましい、このように校正された離間距離を求めた後に、車両移動制御手段17による車両制御を行うことが好ましい。
【0013】
また、離間距離の計測後に、車両制御を、前記回転検出装置1の検出する回転速度を用いて行う場合に、前記逓倍手段4を設けて高分解能の回転検出速度を用いることが好ましい。例えば、前記回転検出装置1が、前記車輪21を支持する車輪用軸受装置10を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダ2と、このエンコーダ2の前記被検出極を検出するセンサ3と、このセンサ3の出力から前記被検出極の位相を逓倍する逓倍手段4とを有し、前記離間距離測定手段14による離間距離の計測後の車両制御を、前記逓倍手段4で逓倍されたパルス出力を用いて行うようにする。
【0014】
この発明において、前記回転検出装置1が、前記車輪21を支持する車輪用軸受装置10を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダ2と、このエンコーダ2の前記被検出極を検出するセンサ3と、このセンサ3の出力から前記被検出極の位相を逓倍する逓倍手段4と、この逓倍手段4の出力が入力されて、またはこの逓倍手段4の出力および前記センサ3の検出出力が入力されて少なくとも2種類の互いに異なる倍率のパルスを出力するパルス出力手段5とを有し、前記車両移動制御手段17は、前記パルス出力手段5の出力する前記少なくとも2種類の倍率のパルスを用いて車両の移動制御を行うものとしても良い。
この構成によると、2種類以上の分解能の回転パルスが出力されるため、前記回転検出装置1で複数種類の制御を行う場合に、制御目的に応じた分解能の回転パルスを用いることができる。例えば、自動運転,自動駐車の場合の車両の走行速度の制御や停止位置の制御は、高分解能の回転パルスを用いることが精度上で好ましい。アンチロックブレーキシステムの制御の場合、あまり高い回転検出精度は不要であり、また標準的なアンチロックブレーキシステムは、その入力パルスの分解能が低いように設けられているため、高分解能のパルス出力では、高速走行時に従来ECUの能力を超えてしまい、従来の標準的なアンチロックブレーキシステムが使用できない。2種類以上の分解能の回転パルスが出力されると、このような制御目的に応じた分解能の回転パルスを用い、適切な制御を行うことができる。
【0015】
また、検出対象の回転体の回転速度に応じて検出分解能を選択することにより、標準的な入力信号分解能の処理制御装置でも回転検出信号を処理できる。すなわち、この回転検出装置を例えば車輪用軸受に装備して車輪の回転検出に用いる場合、処理制御装置である車両のABS制御装置の信号処理能力が標準的であると、高速走行時に高分解能回転パルスを入力するとABS制御装置で入力信号を処理できなくなったり、処理が遅れたりする。この場合、高速走行時に低倍率の回転パルスを選択して入力し、低速走行時に高倍率の回転パルスを選択して入力するという使用方法を採用すれば、標準的なABS制御装置でも十分に信号処理が可能となる。
【0016】
この発明において、前記回転検出装置1が、前記車輪を支持する車輪用軸受装置を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダ2と、このエンコーダ2の前記被検出極を検出するセンサ3と、このセンサ3の出力から前記被検出極の位相を逓倍する逓倍手段4と、この逓倍手段4の出力が入力されて、またはこの逓倍手段4の出力および前記センサ3の検出出力が入力されて少なくとも2種類の互いに異なる倍率のパルスを出力するパルス出力手段5とを有し、前記車両移動制御手段17は、前記パルス出力手段5の出力する前記少なくとも1種類の倍率のパルスを用いて車両の移動制御を行い、他方の倍率のパルスによりABS制御(アンチロックブレーキシステムの制御)を行うものとしてもよい。
【0017】
2種類の互いに異なる倍率のパルスを出力するパルス出力手段5を設ける場合、出力する最も低い倍率のパルスが、前記センサ3の出力するパルス数と同一であることが好ましい。標準的なアンチロックブレーキシステムは、未逓倍のパルスに応じたものが多く、センサ3の出力するパルス数と同一とすることで、従来の標準的なアンチロックブレーキシステムの多くを用いることができる。
【0018】
前記パルス出力手段を設ける場合、この手段の出力する少なくとも1種類の倍率のパルスを、互いに位相が異なるA相,B相の位相差信号としても良い。又、位相差が90度異なるA相,B相の位相差信号とし、前記車両移動制御手段は、車両の移動方向が前後方向のいずれであるかを判定する走行方向前後判定部を有するものとしても良い。
互いに位相が90度異なるA相,B相の位相差信号によると、回転方向の検出が可能であり、前記走行方向前後判定手段23で車両走行方向が判定できる。これにより、駐車制御等においても、適切な車両制御が行える。
【0019】
この発明において、前記車両移動制御手段17が行う車両制御は、前方に走行する自動運転であっても良い。自動運転の場合、車間距離等の対象物との離間距離と、回転検出による実際の走行距離とを用いた精度の良い検出により、信頼性の高い自動運転を行うことができる。
【0020】
この発明において、前記車両移動制御手段17が行う車両制御は、目標位置に対して車両を駐車させる自動駐車であっても良い。自動駐車の場合も、対象物との離間距離と、回転検出による実際の走行距離とを用いた精度の良い検出により、適切な駐車を行うことができる。
【発明の効果】
【0021】
この発明の車両制御装置は、車輪の回転速度を検出する回転検出装置と、この回転検出装置の出力する信号から車両移動量を検出する車両移動量検出手段と、前記車両とこの車両から測定可能な位置にある対象物との間の離間距離を非接触で計測する離間距離測定手段と、この離間距離測定手段で検出された離間距離と前記車両移動量検出手段で検出された車両移動量とを用いて車両の移動の制御を行う車両移動制御手段とを備えるため、車間距離等の対象物との離間距離を計測する離間距離測定手段の測定結果に検知性能の低下や誤差が生じていても、離間距離を正しく認識して信頼性の高い車両制御を行うことができる。
【図面の簡単な説明】
【0022】
【図1】この発明の一実施形態に係る車両制御装置の概略構成を示すブロック図である。
【図2】同車両制御装置の各構成要素と車両との関係を示す説明図である。
【図3】同車両制御装置における回転検出装置を装備した車輪用軸受の一例を示す断面図である。
【図4】同回転検出装置付き車輪用軸受をインボード側から見た側面図である。
【図5】(A)は同回転検出装置におけるエンコーダの一構成例を示す半部断面図、(B)は同エンコーダの斜視図である。
【図6】(A)は同回転検出装置におけるエンコーダの他の構成例を示す半部断面図、(B)は同エンコーダの斜視図である。
【図7】同回転検出装置におけるセンサの内部構成の一例、およびその出力波形例を示す説明図である。
【図8】同回転検出装置における逓倍手段の一構成例のブロック図である。
【図9】同回転検出装置におけるセンサユニットの一概略構成を示すブロック図である。
【図10】センサユニットの他の概略構成を示すブロック図である。
【図11】センサユニットのさらに他の概略構成を示すブロック図である。
【図12】同車両制御装置における回転検出装置を装備した車輪用軸受の他の例を示す断面図である。
【図13】同回転検出装置付き車輪用軸受をインボード側から見た側面図である。
【図14】回転検出装置付き車輪用軸受のさらに他の構成例の断面図である。
【図15】同回転検出装置付き車輪用軸受をインボード側から見た側面図である。
【発明を実施するための形態】
【0023】
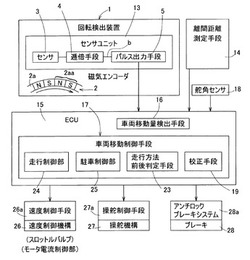
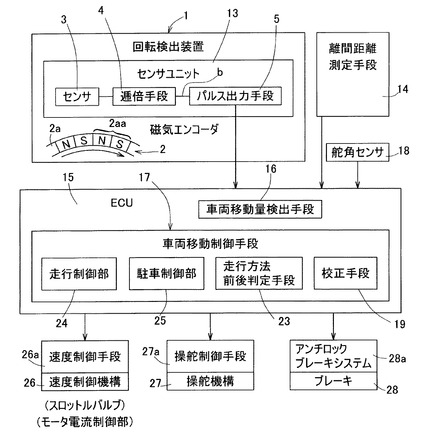
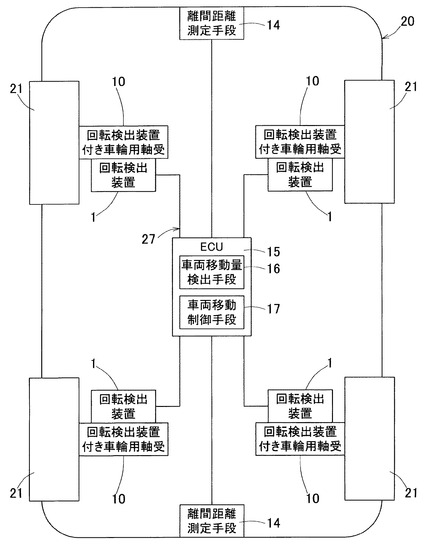
この発明の第1の実施形態を、図1ないし図8と共に説明する。図2に示すように、この車両制御装置は、車輪21の回転速度を検出する回転検出装置1と、この回転検出装置1の出力する信号から車両20の移動量を検出する車両移動量検出手段16と、前記車両20とこの車両20から測定可能な位置にある対象物との間の離間距離を非接触で計測する離間距離測定手段14と、この離間距離測定手段14で検出された離間距離、および前記車両移動量検出手段16で検出された車両移動量を用いて車両20の移動の制御を行う車両移動制御手段17とを備える。車両20は、乗用車、トラック、その他の自動車である。車両20には、この車両の全体を制御する電気制御ユニットである車載ECU15が設けられており、この車載ECU15の一部として、前記離間距離測定手段14および車両移動量検出手段16が設けられている。車載ECU15は、コンピュータとこれに実行されるプログラムとで構成され、車載ECU15と各回転検出装置1および離間距離測定手段14とは、車内LAN27となる配線で接続されている。
【0024】
離間距離測定手段14は、光学的手法で対象物との間の離間距離を測定するものを用いることが好ましい。この種の離間距離測定手段14としては、例えばレーザレーダ等のレーザ光を用い車間距離センサが実用化され、また検出精度も良く、このような車間距離センサを用いることができる。離間距離測定手段14は、この他に、固体撮像素子等を用いたカメラとその撮像した画像を処理する手段とでなるものであっても良い。離間距離測定手段14は、車両20の前部等に1台のみ設けても良いが、この実施形態では車両20の前部と後部とに1台ずつ設けている。また、前部の離間距離測定手段14はレーザ光を用い車間距離センサとし、後部の離間距離測定手段14はカメラと画像処理手段とからなるものを用いている。離間距離測定手段14を複数設置した場合、全ての離間距離測定手段14の出力を車両移動量検出手段16に入力しても、またいずれか一つ、例えば前部の離間距離測定手段14の出力のみを車両移動量検出手段16に入力しても良い。
【0025】
車両20の各車輪21を支持する車輪用軸受は、回転検出装置1を装備した回転検出装置付き軸受10とされ、これら各回転検出装置付き軸受10の回転検出装置1の出力が、車載ECU15の入力部(図示せず)を介して車両移動量検出手段16に入力される。この実施形態では、図の上方に示す前輪および下方に示す後輪となる全ての車輪用軸受を回転検出装置付き軸受10としているが、一部、例えば前輪のみ、または後輪のみの車輪用軸受を回転検出装置付き軸受10としても良い。この場合に、前輪を駆動輪、後輪を従動輪としても、また前輪を従動輪、後輪を駆動輪としても良い。また、車両移動量検出手段16は、車両20の全ての回転検出装置付き軸受10における回転検出装置1の出力から車両20の移動量を検出するものとしても、一部、例えば前輪のみ、もしくは後輪のみ、または駆動輪のみ、または従動輪のみ、または1個のみの回転検出装置付き軸受10の回転検出装置1の出力から車両移動量を検出するものとしても良い。
【0026】
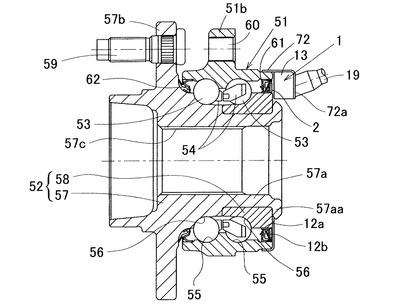
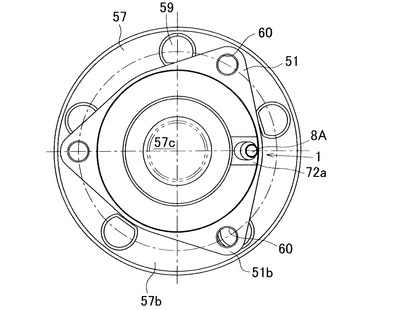
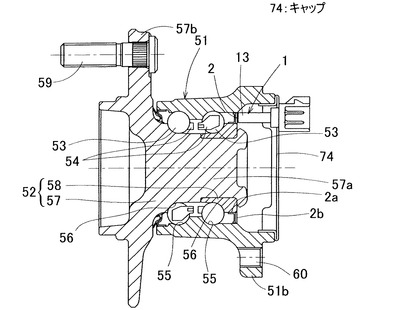
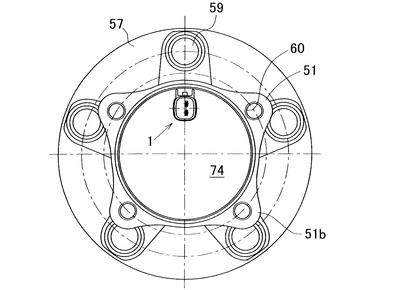
図3は、上記回転検出装置付き軸受10の一例を示す。なお、この明細書において、車両に取付けた状態で車両幅方向の外側寄りとなる側をアウトボード側と呼び、車両幅方向の中央側となる側のインボード側と呼ぶ。図4は、この車輪用軸受10をインボード側から見た側面図を示す。この回転検出装置付き軸受10は、外方部材51と内方部材52の間に複列の転動体53を介在させ、車体に対して車輪を回転自在に支持するものであって、上記した回転検出装置1を装備したものである。
【0027】
外方部材51は固定側の部材であり、内方部材52は回転側の部材である。各列の転動体53は、各列毎に保持器54に保持されており、外方部材51の内周に形成された複列の転走面55と、内方部材52の外周に形成された複列の転走面56との間に介在する。これら車輪用軸受は、複列のアンギュラ玉軸受型とされ、両列の転走面55,55,56,56は、互いに接触角が背面合わせとなるように形成されている。
【0028】
図3の例は、いわゆる第3世代型であって、駆動輪支持用に適用した例である。内方部材52は、ハブ輪57と、このハブ輪57の軸部57aのインボード側部の外周に嵌合させた内輪58との2つの部材からなり、ハブ輪57の軸部57aおよび内輪58の外周に上記各列の転走面56がそれぞれ形成されている。ハブ輪57の軸部57aは、内部に等速ジョイントのステム部(図示せず)を挿通させる中心孔57cを有している。内輪58は、ハブ輪57の軸部57aに形成された段差部内に嵌合し、軸部57aのインボード側端に設けられた加締部57aaによりハブ輪57に対して固定されている。ハブ輪57は、アウトボード側の端部近傍の外周に車輪取付フランジ57bを有し、車輪取付フランジ57bにホイールおよびブレーキロータ(いずれも図示せず)が重ね状態で、ハブボルト59によって取付けられる。ハブボルト59は、車輪取付フランジ57bに設けられたボルト取付孔に圧入されている。外方部材51は、全体が一体の部材からなり、外周に車体取付フランジ51bを有している。外方部材51は、車体取付フランジ51bのボルト挿通孔60に挿通されたナックルボルトにより、懸架装置のナックル(図示せず)に取付けられる。外方部材51と内方部材52間の軸受空間の両端は、接触シール等からなる密封装置61,62によって密封されている。
【0029】
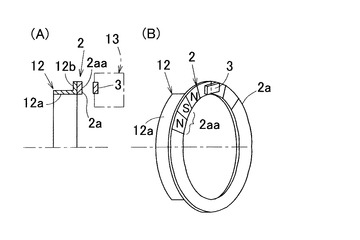
回転検出装置1は、環状のエンコーダ2とセンサユニット13とで構成される。エンコーダ2は、例えば図5(A),(B)に示すように、円周方向に磁極N,Sを交互に有するリング状の多極磁石2aをリング状の芯金12に取付けた磁気エンコーダである。隣合う磁極N,Sで、一つの被検出極となる磁極対2aaを構成する。多極磁石2aは、ゴム磁石、プラスチック磁石、焼結磁石、またはフェライト等の磁石部材を加工した磁石片等からなる。芯金12は、円筒部12aと立板部12bとからなる断面L字状とされ、立板部12bの外面に多極磁石2aが取り付けられている。
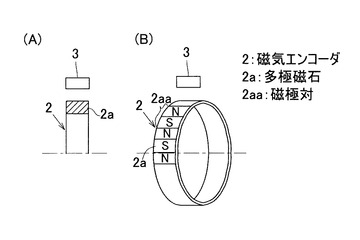
センサユニット13のセンサ3は磁気センサであり、磁気エンコーダ2の多極磁石2aにアキシアル方向に対面する。なお、磁気エンコーダ2とセンサ3とは、例えば図6のようにラジアル方向に対面させても良い。
【0030】
図3において、磁気エンコーダ2は、インボード側の密封装置61の構成部品となるスリンガを兼用しており、内輪58のインボード側端の外周に嵌合している。
【0031】
センサユニット13は、外方部材51のインボード側端にセンサ取付部材72を介して取付けられる。センサ取付部材72は、外方部材51の外周面に嵌合して端面に当接するリング状の金属板であり、周方向の一部に、センサユニット13を取付けるセンサ取付片72aを有している。センサユニット13からはケーブル19が引き出されている。センサユニット13の回路構成は、図1に示す。
【0032】
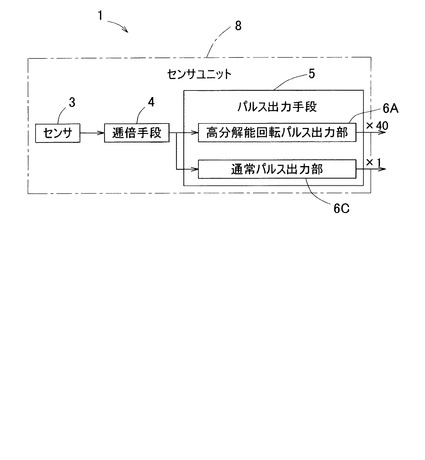
図1において、センサユニット13は、磁気エンコーダ2の被検出極を検出するセンサ3と、このセンサ3の出力から前記被検出極内の位相を逓倍数Nに逓倍して逓倍パルスbを発生する逓倍手段4と、この逓倍手段4から生成される逓倍パルスbに基づき2種類以上の互いに異なる倍率の回転パルスを出力するパルス出力手段5とを備える。センサ3は磁気センサである。逓倍手段4の出力する逓倍数Nは、例えば、10倍、20倍、または40倍など、10〜40倍程度とされる。パルス出力手段5は、複数種類の倍率の回転パルスをそれぞれ出力する複数の出力端子を有する。パルス出力手段5は、出力する複数の倍率の回転パルスのうち、最も低い倍率の回転パルスは、逓倍数が1倍、すなわちセンサ3の出力するパルスと同じ周期のパルスとする。この場合、パルス出力手段5は、逓倍手段4から入力された逓倍パルスbから上記1倍の回転パルスを生成するようにしても良く、または逓倍手段4を介在さずにセンサ3からパルス出力手段5から直接に入力されたパルスを出力する手段を設けても良い。
【0033】
なお、パルス出力手段5から出力される1倍の回転パルス信号は、アンチロックブレーキシステム28aの制御に用いられる。一般に製造されているアンチロックブレーキシステムは高精度なパルス出力に対応していないため、そのような一般のアンチロックブレーキシステムを使用可能とするために、上記1倍の回転パルス信号が出力されるようにしている。
【0034】
上記センサ3、逓倍手段4、およびパルス出力手段5は、例えば一つの集積回路として設けられ、または一つの配線基板上に、センサ3、逓倍手段4、およびパルス出力手段5をそれぞれ構成する集積回路等の回路部品が実装される。これにより、車輪用軸受などへの回転検出装置1の搭載をコンパクトに行なえ、軽量化も可能となる。
【0035】
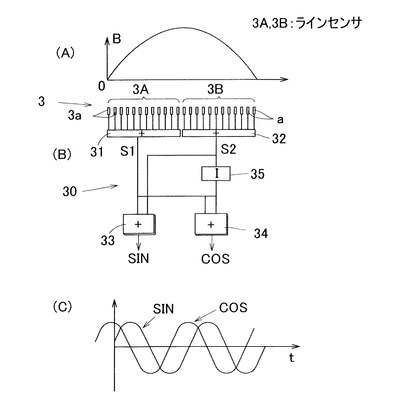
上記センサ3は、ここでは図7(B)に示すようなラインセンサ3A,3Bと演算増幅部30とでなる。ラインセンサ3A,3Bは、磁気エンコーダ2の磁極の並び方向に沿って複数の磁気センサ素子3aを等配して並べて構成される。演算増幅部30は、複数の加算回路31,32,33,34とインバータ35とでなる。なお、図7(A)は、磁気エンコーダ2の1磁極の区間を磁界強度に換算して波形図で示したものである。この場合、第1のラインセンサ3Aは、図7(A)における180度の位相区間のうち90度の位相区間に対応付けて配置し、第2のラインセンサ3Bは残りの90度の位相区間に対応付けて配置する。このような配置構成により、第1のラインセンサ3Aの検出信号を加算回路31で加算した信号S1と、第2のラインセンサ3Bの検出信号を加算回路32で加算した信号S2とを別の加算回路33で加算することで、図7(C)に示すような磁界信号に応じたsin 信号を得る。また、信号S1と、インバータ35を介した信号S2とをさらに別の加算回路34で加算することで、図7(C)に示すような磁界信号に応じたcos 信号を得る。このようにして得られた2相の出力信号から、磁極内における位置を検出することができる。
【0036】
磁気センサ3をこのようにラインセンサで構成した場合、磁界パターンの歪みやノイズの影響が低減されるので、高い精度で磁気エンコーダ2の位相を検出することが可能である。
なお、上記sin 信号をA相の信号、cos 信号をB相の信号と称す。このような90度位相差のA相,B相の信号を出力するセンサ3を設けた場合、図1のパルス出力手段5は、例えば、後に図11に示すようにA相,B相の高分解能の回転パルスを出力する構成のものとする。
【0037】
また、このほかの磁気センサ3の例として、磁気エンコーダ2の1磁極対のピッチλを1周期とするとき、90度位相差(λ/4)となるように磁極の並び方向に離して配置したホール素子などの2つの磁気センサ素子を用い、これら2つの磁気センサ素子により得られる2相の信号(sinφ,cosφ) から磁極内位相 (φ=tan-1(sinφ/cos φ))を逓倍して算出するものとしても良い。
【0038】
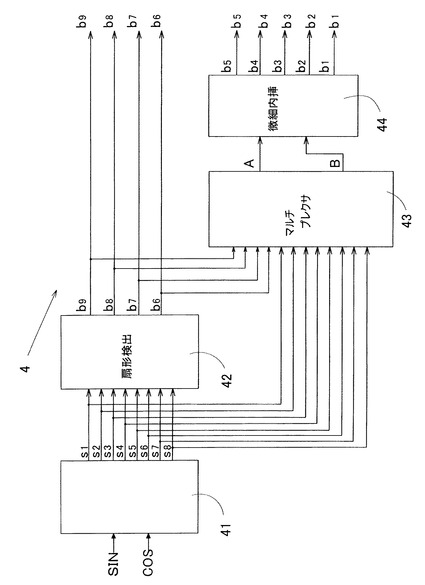
この場合の逓倍手段4は、図8に示すように、信号発生手段41と、扇形検出手段42と、マルチプレクサ手段43と、微細内挿手段44とを備える。
信号発生手段41は、前記磁気センサ3の出力である2相の信号sin,cos から、同一の振幅A0 と同一の平均値C0 とを有し、mをn以下の正の整数、iを1〜2m-1 の正の整数として、相次いで互いに2π/2m-1 ずつ位相がずれた、2m-1 個の信号si を生成する手段である。
扇形発生手段42は、2m 個の等しい扇形Pi を定義するようにコード化された、m個のディジタル信号bn-m+1 ,bn-m+2 ,……,bn-1 ,bn を発生する、2m-1 個の信号si によって区切られた2m 個の扇形Pi を検出する手段である。
マルチプレクサ手段43は、上記扇形発生手段42から発生するm個の上記ディジタル信号bn-m+1 ,bn-m+2 ,……,bn-1 ,bn によって制御され、上記信号発生手段41から生成される2m-1 個の上記信号si を処理して、振幅が一連の2m-1 個の上記信号si の上記平均値C0 と第1のしきい値L1 との間にある部分によって構成される一方の信号Aと、振幅が一連の2m-1 個の上記信号si の上記第1のしきい値L1 とこのしきい値よりも高い第2のしきい値L2 との間にある部分によって構成される他方の信号Bとを生成するアナログの手段である。
微細内挿手段44は、所望の分解能を得るために、角度2π/2m の2m 個の上記扇形Pi の各々を角度2π/2n の2n-m 個の同じサブ扇形に細分するようにコード化された、(n−m)個のディジタル信号b1 ,b2 ,……,bn-m-1 ,bn-m (ここではb1 ,b2 ,……,b8 ,b9 )回転パルスに逓倍される。
【0039】
図1において、パルス出力手段5は、前記逓倍手段4から入力されてくる前記被検出極(磁極対)2aa内の位相データである逓倍パルスbから、少なくとも2種類の互いに異なる倍率の回転パルスを出力する手段である。ここでは図11に詳細を示すように、3種類の倍率の回転パルスが、各高分解能回転パルス出力部6A,6Bおよび通常パルス出力部6Cから同時に出力される。逓倍手段4での逓倍数Nが20であるとすると、第1の高分解能回転パルス出力部6Aからは、例えば逓倍数Nそのままの倍率(×20)の回転パルスが出力される。つまり、磁気エンコーダ2の1磁極対2c内の位置(位相)を20個の回転パルスで検出する。また、第2の高分解能回転パルス出力部6Bからは、逓倍パルスbを分周して、例えば逓倍数Nよりも低い所定倍率(×10)の回転パルスが出力される。通常パルス出力部6Cからは、逓倍パルスbをさらに分周して、例えば1倍の倍率(×1)の回転パルス(1磁極対に対して1個の回転パルス)が出力される。なお、パルス出力手段5に、高分解能回転パルス出力部を3つ以上設けても良い。
【0040】
前記パルス出力手段5から出力される倍率の異なる複数種類の回転パルスのうち、最も倍率の低い回転パルス、つまりこの実施形態の場合、1倍の倍率(×1)の回転パルスについては、次段に設けた電圧/電流変換回路(図示せず)によって電流出力に変換される。具体的には、電流出力として、電流値7mAのパルス信号と電流値14mAのパルス信号が交互に出力される。これにより、回転検出装置1の出力信号を処理する処理制御装置の入力信号形態に対応することができる。
【0041】
図1において、車両移動量検出手段16は、上記のように回転検出装置1の出力する信号から車両20の移動量を検出する。具体的には、パルス出力手段5から出力される逓倍された回転パルスにより車両移動量を検出する。この車両移動量の検出は、車輪21のタイヤ径と回転検出装置1から得られるパルス数とで車両移動量を計算することで行う。複数の回転検出装置1の出力を用いる場合は、各回転検出装置1の回転パルスの平均値を用いても良く、いずれか一つの回転検出装置1の出力を主として車両移動量を計算し、他の回転検出装置1の回転パルスによって補正を行うようにしても良い。
【0042】
車両移動制御手段17は、離間距離測定手段14で検出された離間距離と、車両移動量検出手段16で検出された車両移動量とを用いて車両20の移動の制御を行う。車両移動制御手段17による車両20の移動の制御は、例えば、前方に走行する自動運転や、目標位置に対して車両20を駐車させる自動駐車である。車両移動制御手段17は、走行制御部24および駐車制御部25を有しており、走行制御部24は前記前方走行時の自動運転の制御を行い、駐車制御部25は前記自動駐車の制御を行う。これら走行制御部24および駐車制御部25は、コンソールにおける所定の操作スイッチのオン信号等に応答して制御開始され、また上記操作スイッチのオフ信号によって制御を止める。車両移動制御手段17は、この他に、走行方法判定手段23および校正手段19を有している。なお、走行制御部24および駐車制御部25は、必ずしも自動運転の制御を行うものでなくても良く、走行制御の支援や駐車の支援の制御を行うものであっても良い。
【0043】
走行制御部24による自動運転の制御は、例えば、先行車両に対する追随制御である。この追随制御は、先行車両と自車両との車間距離を一定に保つ制御であり、基本的には、車間距離測定手段14で検出された車間距離が一定範囲となるように、速度制御機構26に加速または減速の指令を出力する制御である。走行制御部24は、さらにブレーキ28に制動指令を与える機能を有していても良い。速度制御機構26は、例えばガソリンエンジン車等の内燃機関車ではスロットルバルブであり、電気モータ車ではモータ電流の制御装置である。速度制御機構26は、その電子制御を行う速度制御手段26aを有しており、この速度制御手段26aに、走行速度制御部24の加減速の指令を出力する。
【0044】
走行制御部24は、上記のように車間距離が一定範囲となるように制御するにつき、車間距離測定手段14で検出された車間距離を、回転検出装置1の出力から車両移動量を検出する車両移動量検出手段16によって校正、または補正することで、精度の良い車間距離を得て、制御に用いる。上記の校正を、校正手段19が行う。
【0045】
校正手段19は、前記車両移動量検出手段16で検出した車両移動量と前記離間距離測定手段14で計測した離間距離とを比較として、前記離間距離測定手段14の計測値となる離間距離を校正する手段である。校正手段19は、例えば、一定距離走行時の、前記回転検出装置1で検出し車両移動量検出手段16で求めた走行距離と、離間距離測定手段14で計測した走行距離(すなわち、距離測定開始時と終了時の対象物との距離の差)を比較することで、離間距離測定手段14の計測値となる離間距離を校正する。これにより、先行車両等の対象物との距離が実際にどれだけであるかを正確に求めることができる。
【0046】
この発明において、前記回転検出装置1が、前記車輪を支持する車輪用軸受装置を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダ2と、このエンコーダ2の前記被検出極を検出するセンサ3と、このセンサ3の出力から前記被検出極の位相を逓倍する逓倍手段4と、この逓倍手段4の出力が入力されて、またはこの逓倍手段4の出力および前記センサ3の検出出力が入力されて少なくとも2種類の互いに異なる倍率のパルスを出力するパルス出力手段5とを有し、前記車両移動制御手段17は、前記パルス出力手段5の出力する前記少なくとも1種類の倍率のパルスを用いて車両の移動制御を行い、他方の倍率のパルスによりABS制御を行うものとしてもよい。
【0047】
このとき、車両移動量検出手段16は、前記逓倍手段4で逓倍されたパルス出力を用いて車両移動量を検出するため、前記校正手段19は、前記走行距離を精度良く検出することができる。そのため、車両移動量検出手段16で求めた走行距離と、離間距離測定手段14で計測した走行距離の差を精度良く求めることができ、高精度な校正が行える。
【0048】
走行制御部24は、このように離間距離測定手段14で計測した離間距離を、逓倍手段4を有する回転検出装置1および車両移動量検出手段16で求めた走行距離で校正して精度良く求めた後、離間距離測定手段14の計測する離間距離、または車両移動量検出手段16で検出される走行距離、またはその離間距離および走行距離の両方を用いて車両20の追従制御等の制御を行う。
【0049】
走行制御部24は、上記追随制御に他に、さらに操舵制御機能を有するものとしても良い。操舵制御を行う場合は、舵角センサ18から出力されるハンドルの操舵角度と、回転検出装置1から出力される回転パルスとを用いて、設定規則(図示せず)に従って操舵量を定め、操舵機構27の操舵制御手段27aに出力する。操舵機構27は、車両20の操舵輪の方向を変える機構であり、操舵制御手段27aは操舵信号の入力に応じて操舵機構27を動作させる制御手段である。
【0050】
駐車制御部25は、車両20が、現在の位置,方向から、目標の駐車位置および方向となるように、車両20を移動させて停止させる自動駐車を行う手段である。駐車制御部25を設ける場合、車両20には、周辺を撮像するカメラを設ける。このカメラは、前記離間距離測定手段14を構成するものであっても、離間距離測定手段14とは別に設けられたものであっても良い。駐車制御部25は、前記カメラで撮像した画像を処理して、駐車目標位置に引かれた線や周辺の壁等から目標の駐車位置,駐車方向を定め、車両20の現在の位置,方向から、その目標の駐車位置,駐車方向となるように車両を移動させるための走行距離および操舵量を、設定規則(図示せず)に従って演算し、その目標の駐車位置,駐車方向に移動させる走行速度、走行方向の指令、および操舵方向,操舵量の指令を出力する。自動駐車の開始時および途中において、車両の現在位置の目標位置との距離は、離間距離測定手段14で検出する。この自動駐車において、駐車制御部25は、前記カメラ等の離間距離測定手段14で計測した距離を、回転検出装置1および車両移動量検出手段16によって得た実際の車両移動量を用いて、前記校正手段19で校正する。このように、離間距離測定手段14の検出値を校正することで、精度良く離間距離が検出でき、目標の位置,方向に精度良く、また効率良く駐車させることができる。
【0051】
駐車制御部25において、車両20は前進と後退を切り換えることが必要な場合が多いが、車両20の走行方向は、車両移動制御手段17に設けられた走行方向前後判定手段23を用いて行う。回転検出装置1が、図7と共に前述したように互いに位相が90度異なるA相,B相の位相差信号を出力するものである場合、この位相差信号により回転方向の検出が可能であり、車両走行方向が判定できる。走行方向前後判定手段23は、このA相,B相の位相差信号から車両走行方向を判定する。
【0052】
上記構成の車両制御装置によると、まず、レーザレーダ等の離間距離測定手段14で先行車両等の対象物との距離を把握する。そのうえで、逓倍手段4を有する高分解能の回転検出装置1および車両移動量検出手段16により車両20の移動量を検出する。また、一定距離走行時の高分解能の回転検出装置1および車両移動量検出手段16で求めた実際の走行距離とレーザレーダ等の離間距離測定手段14が求めた走行距離(測定開始時と終了時の対象物の距離の差)を比較することで、対象物との距離が実施にどれだけであるかを、従来に比べて正確に求めることができるようになる。車両移動制御手段17は、上記のように対象物との距離を求めた後、高分解能の回転検出装置1の検出値、またはレーザレーダ等の離間距離測定手段14の検出値を用いて、上記自動運転や自動駐車の車両制御を行う。
【0053】
この車両制御装置によると、上記のように回転検出装置1に逓倍手段4を設けることで、エンコーダ2の検出極の配列ピッチよりも高分解能の回転検出が行える。高分解能の回転検出を行うことで、離間距離測定手段14による誤差を補える程度の車両の移動量検出が精度良く行える。また、回転検出装置1を車輪用軸受に装備することで、車両にコンパクトに、かつ組立工数の増加を抑えて、回転検出装置1の設置が行える。
なお、エンコーダ2が磁気エンコーダである場合、光学式に比べて汚れ等による検知性能の低下は生じ難いが、検出極の配列ピッチを細かくすることが難しい。しかし、上記のように逓倍手段4を設けることで、必要な高分解能を得ることができる。
【0054】
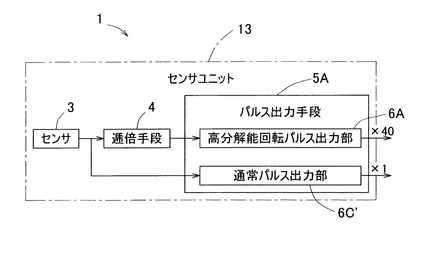
図10は、回転検出装置1の変形例を示す。この回転検出装置1では、パルス出力手段5Aにおける回転パルス出力部として、逓倍手段4の出力から高分解能(高倍率)の回転パルスを出力する高分解能回転パルス出力部6Aと、センサ3の検出出力から得られるパルスを、逓倍手段4を介さずに出力する通常パルス出力部6C’とを有するものとしている。高分解能回転パルス出力部6Aからは例えば40倍の倍率(×40)の回転パルスが出力される。センサ3の検出出力から得られるパルスとは、エンコーダ2の1被検出極に対応して1パルスを出力するパルスである。高分解能回転パルス出力部6Aとして、他の種類の倍率の回転パルスを出力するものを別に有していても良い。その他の構成は図1の実施形態の場合と同様である。
【0055】
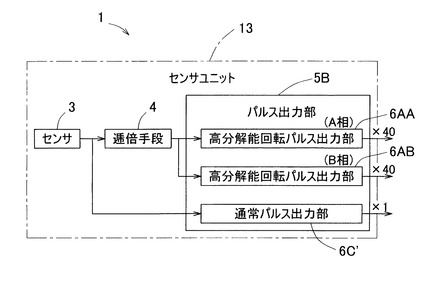
図11は、回転検出装置1のさらに他の変形例を示す。この回転検出装置1では、図10の例において、パルス出力手段5Aにおける少なくとも1種類の倍率の回転パルスを出力する高分解能回転パルス出力部として、互いに位相が90度異なるA相の回転パルスとB相の回転パルスとを個別に出力する一対の高分解能回転パルス出力部6AA、6ABを設けたものである。その他の構成は図10の例の場合と同様である。
【0056】
このように、同じ倍率の回転パルス信号として、互いに位相が90度異なるA相,B相の位相差信号を出力することにより、回転方向の検出が可能となる。この回転検出装置1を車両の車輪用軸受に装備した場合には、車両の前進・後退を検出することができる。
【0057】
図12、図13は、図3、図4に示した回転検出装置付き車輪用軸受の例において、従動輪用としたものであって、ハブ輪57は中心孔を有しておらず、中実とされている。外方部材51のインボード側の端部は、内方部材52よりも軸方向に延びていて、その端面開口をキャップ74で覆ってある。キャップ74は、外周縁に設けられた鍔部74aで外方部材51の内周に嵌合して取付けられる。このキャップ74に、磁気エンコーダ2に対向するように、センサ部分13が取付けられている。キャップ74には、回転検出装置1の少なくともセンサ部分13が嵌入された状態で、回転検出装置本体が図示外のボルト、ナットなどを用いて着脱可能に設けられる。キャップ74にセンサ部分13が嵌入れされた状態では、このセンサ部分13を覆うモールド材(弾性部材)の弾性によって、回転検出装置本体との間に形成され得るキャップ74の環状隙間がタイトに密封される構成になっている。磁気エンコーダ2は、内輪58の外周に嵌合して取付けられており、回転検出装置1とアキシアル方向に対面する。
【0058】
この構成の場合、従動輪用への適用に限られるが、キャップ74によって外方部材51の端部開口の全体が覆われるので、外部から回転検出装置1の設置部への泥水等の浸入を防止でき、回転検出装置1の信頼性を向上させることができる。
【0059】
図14、図15は、図3、図4に示した回転検出装置付き車輪用軸受の例において、インボード側の軸受空間の密封装置61を、磁気エンコーダ2よりも外部に配置したものである。すなわち、外方部材51に取付けられた環状のセンサ取付部材72と内輪58との間に、接触シール等からなる密封装置61を設けている。
この構成の場合、磁気エンコーダ2が密封装置61により、外部空間に対して密封され、磁気エンコーダ2とセンサ部分13との間に異物を噛み込むこと等が防止される。その他の構成,効果は図3、図4の例と同様である。
【0060】
なお、上記各実施形態の車輪用軸受10は、第3世代型の例について述べたが、この発明の回転検出装置付き車輪用軸受10は、ハブと軸受とが別々に設けられる第1世代型や第2世代型、内方部材がハブ輪と等速ジョイント外輪とで構成される第4世代型の車輪用軸受にも適用でき、また外方部材が回転側で内方部材が固定側の車輪用軸受に適用することもできる。また、アンギュラ玉軸受型に限らず、各種の車輪用軸受に適用することができる。さらに、回転検出装置1における被検出体は、磁気エンコーダに限らず、例えば金属製のギヤ状のパルサリングであっても良い。
【符号の説明】
【0061】
1…回転検出装置
2…エンコーダ
3…センサ
4…逓倍手段
5,5A,5B…パルス出力手段
10…回転検出装置付き車輪用軸受
14…離間距離測定手段
15…車載ECU
16…車両移動量検出手段
17…車両移動制御手段
19…校正手段
20…車両
21…車輪
23…走行方向前後判定手段
24…走行制御部
25…駐車制御部
【技術分野】
【0001】
この発明は、自動車等の車両の自動運転、自動駐車や、走行支援、駐車支援等を行う車両制御装置に関する。
【背景技術】
【0002】
車間距離や、車両と路面の対象物等との距離を測定する手段として、レーザ光を用いた車間距離センサ(レーザレーダ)が知られている。その車間距離等の測定結果を用いて、自動運転や運転支援の車両制御が行われる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−271721号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、レーザ光を用いた車間距離センサでは、送受信部の汚れや、悪天候により検知性能が低下する。また、送受信部に対する対象物の角度や対象物の形状等によっても誤差が生じる。
【0005】
この発明の目的は、車間距離等の対象物との離間距離を計測する離間距離測定手段の測定結果に検知性能の低下や誤差が生じていても、離間距離を正しく認識して信頼性の高い車両制御が行える車両制御装置を提供することである。
【課題を解決するための手段】
【0006】
この発明の車両制御装置は、車輪21の回転速度を検出する回転検出装置1と、この回転検出装置1の出力する信号から車両20の移動量を検出する車両移動量検出手段16と、前記車両20とこの車両20から測定可能な位置にある対象物との間の離間距離を非接触で計測する離間距離測定手段14と、この離間距離測定手段14で検出された離間距離と前記車両移動量検出手段16で検出された車両移動量とを用いて車両20の移動の制御を行う車両移動制御手段17とを備える。
【0007】
この構成によると、車両移動制御手段17は、離間距離測定手段14の計測結果となる離間距離だけでなく、回転検出装置1および車両移動量検出手段16で検出される実際に移動した車両移動量を用いて車両20の制御を行う。そのため、離間距離測定手段14が、その送受信部の汚れや、悪天候により検知性能の低下を生じていたり、あるいは送受信部に対する対象物の角度や対象物の形状等により計測結果に誤差が生じていても、回転検出による車両移動量の併用により、精度良く車両制御を行うことができる。
【0008】
前記回転検出装置1は、高分解能であることが好ましい。例えば、前記回転検出装置1が、前記車輪21を支持する車輪用軸受装置10を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダ2と、このエンコーダ2の前記被検出極を検出するセンサ3と、このセンサ3の出力から前記被検出極の位相を逓倍する逓倍手段4とを有し、前記車両移動量検出手段17は、前記逓倍手段4で逓倍されたパルス出力から車両20の移動量を検出するものとしてもよい。
このように逓倍手段4を設けることで、エンコーダ2の検出極の配列ピッチよりも高分解能の回転検出が行える。高分解能の回転検出を行うことで、離間距離測定手段14による誤差を補える程度の車両の移動量検出が精度良く行える。また、回転検出装置1を車輪用軸受に装備することで、車両にコンパクトに、かつ組立工数の増加を抑えて、回転検出装置1の設置が行える。
なお、エンコーダ2が磁気エンコーダである場合、光学式に比べて汚れ等による検知性能の低下は生じ難いが、検出極の配列ピッチを細かくすることが難しい。しかし、上記のように逓倍手段4を設けることで、必要な高分解能を得ることができる。
【0009】
前記離間距離測定手段14は、光学的手法で対象物との間の離間距離を測定するものを用いることが好ましい。この種の離間距離測定手段14としては、例えばレーザレーダ等のレーザ光を用い車間距離センサが実用化され、また検出精度も良く、このような車間距離センサを用いることができる。
【0010】
この発明において、前記車両移動量検出手段16で検出した車両移動量と前記離間距離測定手段14で計測した離間距離とを比較として、前記離間距離測定手段14の計測値となる離間距離を校正する校正手段19を、前記車両移動制御手段17に設けても良い。
例えば、一定距離走行時の、前記回転検出装置1で検出し車両移動量検出手段16で求めた走行距離と、離間距離測定手段14で計測した走行距離(すなわち、距離測定開始時と終了時の対象物との距離の差)を比較することで、対象物との距離が実際にどれだけであるかを正確に求めることができる。前記校正手段19が行う、走行中の離間距離測定手段14で計測した離間距離と回転検出から求めた走行距離との比較の具体例を2つ挙げる。1つ目の例としては、校正を定期的に行い、固定物と車両との間で行われた直前の校正結果をそのまま利用する。離間距離測定手段14の汚れの状態が急激に変わらなければこの方法が可能である。2つ目の例は、車両の速度を故意的(機械的に)に変化をさせ、そのときの先行車両との離間距離測定手段14で計測した距離変化量と回転検出装置1(逓倍手段4を含む)で求めた距離変化量を比較し校正する方法である。車両の速度は回転検出装置1(逓倍手段4を用いてもよい)で見ることが可能であるので、時間と速度の変化の関係から、速度を変化させなかった場合の推定移動量と速度を変化させた場合の移動量の差を求めることが可能である。この距離を速度変化開始前と開始後の離間距離測定手段14で求めた距離変化量と比較することで校正が可能である。なお、回転検出に逓倍手段4を用いた場合、タイヤの極僅かな回転量を検出することができるので、速度変化量及び変化時間が少なくても校正が可能となる。また、先行車両の速度変化有無に関しては、校正後、校正時の自車の速度変化前の速度に戻し、そのときの先行車両との距離変化量が校正前と同一であれば、先行車両の速度変化は無いと推定する。
【0011】
前記校正手段19を設ける場合に、前記逓倍手段4を設けることが好ましい。例えば、前記回転検出装置1が、前記車輪20を支持する車輪用軸受装置10を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダ2と、このエンコーダ2の前記被検出極を検出するセンサ3と、このセンサ3の出力から前記被検出極の位相を逓倍する逓倍手段4とを有し、前記校正手段19は、前記逓倍手段4で逓倍されたパルス出力を用いて前記校正を行うものとする。
前記逓倍手段4を有する場合は、より一層正確に、車両移動量検出手段16で求めた走行距離と、離間距離測定手段14で計測した走行距離の差を求めることができる。
【0012】
この発明において、前記車両移動制御手段17は、前記離間距離測定手段14による離間距離の計測後に、車両制御を、前記回転検出装置1の検出する回転速度を用いて行うものとしても良い。
また、前記車両移動制御手段17は、前記離間距離測定手段14による離間距離の計測後に、車両制御を、前記離間距離測定手段で検出された離間距離を用いて行うものとしても良い。
いずれの場合も、前記離間距離測定手段14による離間距離の計測は、前記校正手段4を設けて校正することが好ましい、このように校正された離間距離を求めた後に、車両移動制御手段17による車両制御を行うことが好ましい。
【0013】
また、離間距離の計測後に、車両制御を、前記回転検出装置1の検出する回転速度を用いて行う場合に、前記逓倍手段4を設けて高分解能の回転検出速度を用いることが好ましい。例えば、前記回転検出装置1が、前記車輪21を支持する車輪用軸受装置10を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダ2と、このエンコーダ2の前記被検出極を検出するセンサ3と、このセンサ3の出力から前記被検出極の位相を逓倍する逓倍手段4とを有し、前記離間距離測定手段14による離間距離の計測後の車両制御を、前記逓倍手段4で逓倍されたパルス出力を用いて行うようにする。
【0014】
この発明において、前記回転検出装置1が、前記車輪21を支持する車輪用軸受装置10を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダ2と、このエンコーダ2の前記被検出極を検出するセンサ3と、このセンサ3の出力から前記被検出極の位相を逓倍する逓倍手段4と、この逓倍手段4の出力が入力されて、またはこの逓倍手段4の出力および前記センサ3の検出出力が入力されて少なくとも2種類の互いに異なる倍率のパルスを出力するパルス出力手段5とを有し、前記車両移動制御手段17は、前記パルス出力手段5の出力する前記少なくとも2種類の倍率のパルスを用いて車両の移動制御を行うものとしても良い。
この構成によると、2種類以上の分解能の回転パルスが出力されるため、前記回転検出装置1で複数種類の制御を行う場合に、制御目的に応じた分解能の回転パルスを用いることができる。例えば、自動運転,自動駐車の場合の車両の走行速度の制御や停止位置の制御は、高分解能の回転パルスを用いることが精度上で好ましい。アンチロックブレーキシステムの制御の場合、あまり高い回転検出精度は不要であり、また標準的なアンチロックブレーキシステムは、その入力パルスの分解能が低いように設けられているため、高分解能のパルス出力では、高速走行時に従来ECUの能力を超えてしまい、従来の標準的なアンチロックブレーキシステムが使用できない。2種類以上の分解能の回転パルスが出力されると、このような制御目的に応じた分解能の回転パルスを用い、適切な制御を行うことができる。
【0015】
また、検出対象の回転体の回転速度に応じて検出分解能を選択することにより、標準的な入力信号分解能の処理制御装置でも回転検出信号を処理できる。すなわち、この回転検出装置を例えば車輪用軸受に装備して車輪の回転検出に用いる場合、処理制御装置である車両のABS制御装置の信号処理能力が標準的であると、高速走行時に高分解能回転パルスを入力するとABS制御装置で入力信号を処理できなくなったり、処理が遅れたりする。この場合、高速走行時に低倍率の回転パルスを選択して入力し、低速走行時に高倍率の回転パルスを選択して入力するという使用方法を採用すれば、標準的なABS制御装置でも十分に信号処理が可能となる。
【0016】
この発明において、前記回転検出装置1が、前記車輪を支持する車輪用軸受装置を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダ2と、このエンコーダ2の前記被検出極を検出するセンサ3と、このセンサ3の出力から前記被検出極の位相を逓倍する逓倍手段4と、この逓倍手段4の出力が入力されて、またはこの逓倍手段4の出力および前記センサ3の検出出力が入力されて少なくとも2種類の互いに異なる倍率のパルスを出力するパルス出力手段5とを有し、前記車両移動制御手段17は、前記パルス出力手段5の出力する前記少なくとも1種類の倍率のパルスを用いて車両の移動制御を行い、他方の倍率のパルスによりABS制御(アンチロックブレーキシステムの制御)を行うものとしてもよい。
【0017】
2種類の互いに異なる倍率のパルスを出力するパルス出力手段5を設ける場合、出力する最も低い倍率のパルスが、前記センサ3の出力するパルス数と同一であることが好ましい。標準的なアンチロックブレーキシステムは、未逓倍のパルスに応じたものが多く、センサ3の出力するパルス数と同一とすることで、従来の標準的なアンチロックブレーキシステムの多くを用いることができる。
【0018】
前記パルス出力手段を設ける場合、この手段の出力する少なくとも1種類の倍率のパルスを、互いに位相が異なるA相,B相の位相差信号としても良い。又、位相差が90度異なるA相,B相の位相差信号とし、前記車両移動制御手段は、車両の移動方向が前後方向のいずれであるかを判定する走行方向前後判定部を有するものとしても良い。
互いに位相が90度異なるA相,B相の位相差信号によると、回転方向の検出が可能であり、前記走行方向前後判定手段23で車両走行方向が判定できる。これにより、駐車制御等においても、適切な車両制御が行える。
【0019】
この発明において、前記車両移動制御手段17が行う車両制御は、前方に走行する自動運転であっても良い。自動運転の場合、車間距離等の対象物との離間距離と、回転検出による実際の走行距離とを用いた精度の良い検出により、信頼性の高い自動運転を行うことができる。
【0020】
この発明において、前記車両移動制御手段17が行う車両制御は、目標位置に対して車両を駐車させる自動駐車であっても良い。自動駐車の場合も、対象物との離間距離と、回転検出による実際の走行距離とを用いた精度の良い検出により、適切な駐車を行うことができる。
【発明の効果】
【0021】
この発明の車両制御装置は、車輪の回転速度を検出する回転検出装置と、この回転検出装置の出力する信号から車両移動量を検出する車両移動量検出手段と、前記車両とこの車両から測定可能な位置にある対象物との間の離間距離を非接触で計測する離間距離測定手段と、この離間距離測定手段で検出された離間距離と前記車両移動量検出手段で検出された車両移動量とを用いて車両の移動の制御を行う車両移動制御手段とを備えるため、車間距離等の対象物との離間距離を計測する離間距離測定手段の測定結果に検知性能の低下や誤差が生じていても、離間距離を正しく認識して信頼性の高い車両制御を行うことができる。
【図面の簡単な説明】
【0022】
【図1】この発明の一実施形態に係る車両制御装置の概略構成を示すブロック図である。
【図2】同車両制御装置の各構成要素と車両との関係を示す説明図である。
【図3】同車両制御装置における回転検出装置を装備した車輪用軸受の一例を示す断面図である。
【図4】同回転検出装置付き車輪用軸受をインボード側から見た側面図である。
【図5】(A)は同回転検出装置におけるエンコーダの一構成例を示す半部断面図、(B)は同エンコーダの斜視図である。
【図6】(A)は同回転検出装置におけるエンコーダの他の構成例を示す半部断面図、(B)は同エンコーダの斜視図である。
【図7】同回転検出装置におけるセンサの内部構成の一例、およびその出力波形例を示す説明図である。
【図8】同回転検出装置における逓倍手段の一構成例のブロック図である。
【図9】同回転検出装置におけるセンサユニットの一概略構成を示すブロック図である。
【図10】センサユニットの他の概略構成を示すブロック図である。
【図11】センサユニットのさらに他の概略構成を示すブロック図である。
【図12】同車両制御装置における回転検出装置を装備した車輪用軸受の他の例を示す断面図である。
【図13】同回転検出装置付き車輪用軸受をインボード側から見た側面図である。
【図14】回転検出装置付き車輪用軸受のさらに他の構成例の断面図である。
【図15】同回転検出装置付き車輪用軸受をインボード側から見た側面図である。
【発明を実施するための形態】
【0023】
この発明の第1の実施形態を、図1ないし図8と共に説明する。図2に示すように、この車両制御装置は、車輪21の回転速度を検出する回転検出装置1と、この回転検出装置1の出力する信号から車両20の移動量を検出する車両移動量検出手段16と、前記車両20とこの車両20から測定可能な位置にある対象物との間の離間距離を非接触で計測する離間距離測定手段14と、この離間距離測定手段14で検出された離間距離、および前記車両移動量検出手段16で検出された車両移動量を用いて車両20の移動の制御を行う車両移動制御手段17とを備える。車両20は、乗用車、トラック、その他の自動車である。車両20には、この車両の全体を制御する電気制御ユニットである車載ECU15が設けられており、この車載ECU15の一部として、前記離間距離測定手段14および車両移動量検出手段16が設けられている。車載ECU15は、コンピュータとこれに実行されるプログラムとで構成され、車載ECU15と各回転検出装置1および離間距離測定手段14とは、車内LAN27となる配線で接続されている。
【0024】
離間距離測定手段14は、光学的手法で対象物との間の離間距離を測定するものを用いることが好ましい。この種の離間距離測定手段14としては、例えばレーザレーダ等のレーザ光を用い車間距離センサが実用化され、また検出精度も良く、このような車間距離センサを用いることができる。離間距離測定手段14は、この他に、固体撮像素子等を用いたカメラとその撮像した画像を処理する手段とでなるものであっても良い。離間距離測定手段14は、車両20の前部等に1台のみ設けても良いが、この実施形態では車両20の前部と後部とに1台ずつ設けている。また、前部の離間距離測定手段14はレーザ光を用い車間距離センサとし、後部の離間距離測定手段14はカメラと画像処理手段とからなるものを用いている。離間距離測定手段14を複数設置した場合、全ての離間距離測定手段14の出力を車両移動量検出手段16に入力しても、またいずれか一つ、例えば前部の離間距離測定手段14の出力のみを車両移動量検出手段16に入力しても良い。
【0025】
車両20の各車輪21を支持する車輪用軸受は、回転検出装置1を装備した回転検出装置付き軸受10とされ、これら各回転検出装置付き軸受10の回転検出装置1の出力が、車載ECU15の入力部(図示せず)を介して車両移動量検出手段16に入力される。この実施形態では、図の上方に示す前輪および下方に示す後輪となる全ての車輪用軸受を回転検出装置付き軸受10としているが、一部、例えば前輪のみ、または後輪のみの車輪用軸受を回転検出装置付き軸受10としても良い。この場合に、前輪を駆動輪、後輪を従動輪としても、また前輪を従動輪、後輪を駆動輪としても良い。また、車両移動量検出手段16は、車両20の全ての回転検出装置付き軸受10における回転検出装置1の出力から車両20の移動量を検出するものとしても、一部、例えば前輪のみ、もしくは後輪のみ、または駆動輪のみ、または従動輪のみ、または1個のみの回転検出装置付き軸受10の回転検出装置1の出力から車両移動量を検出するものとしても良い。
【0026】
図3は、上記回転検出装置付き軸受10の一例を示す。なお、この明細書において、車両に取付けた状態で車両幅方向の外側寄りとなる側をアウトボード側と呼び、車両幅方向の中央側となる側のインボード側と呼ぶ。図4は、この車輪用軸受10をインボード側から見た側面図を示す。この回転検出装置付き軸受10は、外方部材51と内方部材52の間に複列の転動体53を介在させ、車体に対して車輪を回転自在に支持するものであって、上記した回転検出装置1を装備したものである。
【0027】
外方部材51は固定側の部材であり、内方部材52は回転側の部材である。各列の転動体53は、各列毎に保持器54に保持されており、外方部材51の内周に形成された複列の転走面55と、内方部材52の外周に形成された複列の転走面56との間に介在する。これら車輪用軸受は、複列のアンギュラ玉軸受型とされ、両列の転走面55,55,56,56は、互いに接触角が背面合わせとなるように形成されている。
【0028】
図3の例は、いわゆる第3世代型であって、駆動輪支持用に適用した例である。内方部材52は、ハブ輪57と、このハブ輪57の軸部57aのインボード側部の外周に嵌合させた内輪58との2つの部材からなり、ハブ輪57の軸部57aおよび内輪58の外周に上記各列の転走面56がそれぞれ形成されている。ハブ輪57の軸部57aは、内部に等速ジョイントのステム部(図示せず)を挿通させる中心孔57cを有している。内輪58は、ハブ輪57の軸部57aに形成された段差部内に嵌合し、軸部57aのインボード側端に設けられた加締部57aaによりハブ輪57に対して固定されている。ハブ輪57は、アウトボード側の端部近傍の外周に車輪取付フランジ57bを有し、車輪取付フランジ57bにホイールおよびブレーキロータ(いずれも図示せず)が重ね状態で、ハブボルト59によって取付けられる。ハブボルト59は、車輪取付フランジ57bに設けられたボルト取付孔に圧入されている。外方部材51は、全体が一体の部材からなり、外周に車体取付フランジ51bを有している。外方部材51は、車体取付フランジ51bのボルト挿通孔60に挿通されたナックルボルトにより、懸架装置のナックル(図示せず)に取付けられる。外方部材51と内方部材52間の軸受空間の両端は、接触シール等からなる密封装置61,62によって密封されている。
【0029】
回転検出装置1は、環状のエンコーダ2とセンサユニット13とで構成される。エンコーダ2は、例えば図5(A),(B)に示すように、円周方向に磁極N,Sを交互に有するリング状の多極磁石2aをリング状の芯金12に取付けた磁気エンコーダである。隣合う磁極N,Sで、一つの被検出極となる磁極対2aaを構成する。多極磁石2aは、ゴム磁石、プラスチック磁石、焼結磁石、またはフェライト等の磁石部材を加工した磁石片等からなる。芯金12は、円筒部12aと立板部12bとからなる断面L字状とされ、立板部12bの外面に多極磁石2aが取り付けられている。
センサユニット13のセンサ3は磁気センサであり、磁気エンコーダ2の多極磁石2aにアキシアル方向に対面する。なお、磁気エンコーダ2とセンサ3とは、例えば図6のようにラジアル方向に対面させても良い。
【0030】
図3において、磁気エンコーダ2は、インボード側の密封装置61の構成部品となるスリンガを兼用しており、内輪58のインボード側端の外周に嵌合している。
【0031】
センサユニット13は、外方部材51のインボード側端にセンサ取付部材72を介して取付けられる。センサ取付部材72は、外方部材51の外周面に嵌合して端面に当接するリング状の金属板であり、周方向の一部に、センサユニット13を取付けるセンサ取付片72aを有している。センサユニット13からはケーブル19が引き出されている。センサユニット13の回路構成は、図1に示す。
【0032】
図1において、センサユニット13は、磁気エンコーダ2の被検出極を検出するセンサ3と、このセンサ3の出力から前記被検出極内の位相を逓倍数Nに逓倍して逓倍パルスbを発生する逓倍手段4と、この逓倍手段4から生成される逓倍パルスbに基づき2種類以上の互いに異なる倍率の回転パルスを出力するパルス出力手段5とを備える。センサ3は磁気センサである。逓倍手段4の出力する逓倍数Nは、例えば、10倍、20倍、または40倍など、10〜40倍程度とされる。パルス出力手段5は、複数種類の倍率の回転パルスをそれぞれ出力する複数の出力端子を有する。パルス出力手段5は、出力する複数の倍率の回転パルスのうち、最も低い倍率の回転パルスは、逓倍数が1倍、すなわちセンサ3の出力するパルスと同じ周期のパルスとする。この場合、パルス出力手段5は、逓倍手段4から入力された逓倍パルスbから上記1倍の回転パルスを生成するようにしても良く、または逓倍手段4を介在さずにセンサ3からパルス出力手段5から直接に入力されたパルスを出力する手段を設けても良い。
【0033】
なお、パルス出力手段5から出力される1倍の回転パルス信号は、アンチロックブレーキシステム28aの制御に用いられる。一般に製造されているアンチロックブレーキシステムは高精度なパルス出力に対応していないため、そのような一般のアンチロックブレーキシステムを使用可能とするために、上記1倍の回転パルス信号が出力されるようにしている。
【0034】
上記センサ3、逓倍手段4、およびパルス出力手段5は、例えば一つの集積回路として設けられ、または一つの配線基板上に、センサ3、逓倍手段4、およびパルス出力手段5をそれぞれ構成する集積回路等の回路部品が実装される。これにより、車輪用軸受などへの回転検出装置1の搭載をコンパクトに行なえ、軽量化も可能となる。
【0035】
上記センサ3は、ここでは図7(B)に示すようなラインセンサ3A,3Bと演算増幅部30とでなる。ラインセンサ3A,3Bは、磁気エンコーダ2の磁極の並び方向に沿って複数の磁気センサ素子3aを等配して並べて構成される。演算増幅部30は、複数の加算回路31,32,33,34とインバータ35とでなる。なお、図7(A)は、磁気エンコーダ2の1磁極の区間を磁界強度に換算して波形図で示したものである。この場合、第1のラインセンサ3Aは、図7(A)における180度の位相区間のうち90度の位相区間に対応付けて配置し、第2のラインセンサ3Bは残りの90度の位相区間に対応付けて配置する。このような配置構成により、第1のラインセンサ3Aの検出信号を加算回路31で加算した信号S1と、第2のラインセンサ3Bの検出信号を加算回路32で加算した信号S2とを別の加算回路33で加算することで、図7(C)に示すような磁界信号に応じたsin 信号を得る。また、信号S1と、インバータ35を介した信号S2とをさらに別の加算回路34で加算することで、図7(C)に示すような磁界信号に応じたcos 信号を得る。このようにして得られた2相の出力信号から、磁極内における位置を検出することができる。
【0036】
磁気センサ3をこのようにラインセンサで構成した場合、磁界パターンの歪みやノイズの影響が低減されるので、高い精度で磁気エンコーダ2の位相を検出することが可能である。
なお、上記sin 信号をA相の信号、cos 信号をB相の信号と称す。このような90度位相差のA相,B相の信号を出力するセンサ3を設けた場合、図1のパルス出力手段5は、例えば、後に図11に示すようにA相,B相の高分解能の回転パルスを出力する構成のものとする。
【0037】
また、このほかの磁気センサ3の例として、磁気エンコーダ2の1磁極対のピッチλを1周期とするとき、90度位相差(λ/4)となるように磁極の並び方向に離して配置したホール素子などの2つの磁気センサ素子を用い、これら2つの磁気センサ素子により得られる2相の信号(sinφ,cosφ) から磁極内位相 (φ=tan-1(sinφ/cos φ))を逓倍して算出するものとしても良い。
【0038】
この場合の逓倍手段4は、図8に示すように、信号発生手段41と、扇形検出手段42と、マルチプレクサ手段43と、微細内挿手段44とを備える。
信号発生手段41は、前記磁気センサ3の出力である2相の信号sin,cos から、同一の振幅A0 と同一の平均値C0 とを有し、mをn以下の正の整数、iを1〜2m-1 の正の整数として、相次いで互いに2π/2m-1 ずつ位相がずれた、2m-1 個の信号si を生成する手段である。
扇形発生手段42は、2m 個の等しい扇形Pi を定義するようにコード化された、m個のディジタル信号bn-m+1 ,bn-m+2 ,……,bn-1 ,bn を発生する、2m-1 個の信号si によって区切られた2m 個の扇形Pi を検出する手段である。
マルチプレクサ手段43は、上記扇形発生手段42から発生するm個の上記ディジタル信号bn-m+1 ,bn-m+2 ,……,bn-1 ,bn によって制御され、上記信号発生手段41から生成される2m-1 個の上記信号si を処理して、振幅が一連の2m-1 個の上記信号si の上記平均値C0 と第1のしきい値L1 との間にある部分によって構成される一方の信号Aと、振幅が一連の2m-1 個の上記信号si の上記第1のしきい値L1 とこのしきい値よりも高い第2のしきい値L2 との間にある部分によって構成される他方の信号Bとを生成するアナログの手段である。
微細内挿手段44は、所望の分解能を得るために、角度2π/2m の2m 個の上記扇形Pi の各々を角度2π/2n の2n-m 個の同じサブ扇形に細分するようにコード化された、(n−m)個のディジタル信号b1 ,b2 ,……,bn-m-1 ,bn-m (ここではb1 ,b2 ,……,b8 ,b9 )回転パルスに逓倍される。
【0039】
図1において、パルス出力手段5は、前記逓倍手段4から入力されてくる前記被検出極(磁極対)2aa内の位相データである逓倍パルスbから、少なくとも2種類の互いに異なる倍率の回転パルスを出力する手段である。ここでは図11に詳細を示すように、3種類の倍率の回転パルスが、各高分解能回転パルス出力部6A,6Bおよび通常パルス出力部6Cから同時に出力される。逓倍手段4での逓倍数Nが20であるとすると、第1の高分解能回転パルス出力部6Aからは、例えば逓倍数Nそのままの倍率(×20)の回転パルスが出力される。つまり、磁気エンコーダ2の1磁極対2c内の位置(位相)を20個の回転パルスで検出する。また、第2の高分解能回転パルス出力部6Bからは、逓倍パルスbを分周して、例えば逓倍数Nよりも低い所定倍率(×10)の回転パルスが出力される。通常パルス出力部6Cからは、逓倍パルスbをさらに分周して、例えば1倍の倍率(×1)の回転パルス(1磁極対に対して1個の回転パルス)が出力される。なお、パルス出力手段5に、高分解能回転パルス出力部を3つ以上設けても良い。
【0040】
前記パルス出力手段5から出力される倍率の異なる複数種類の回転パルスのうち、最も倍率の低い回転パルス、つまりこの実施形態の場合、1倍の倍率(×1)の回転パルスについては、次段に設けた電圧/電流変換回路(図示せず)によって電流出力に変換される。具体的には、電流出力として、電流値7mAのパルス信号と電流値14mAのパルス信号が交互に出力される。これにより、回転検出装置1の出力信号を処理する処理制御装置の入力信号形態に対応することができる。
【0041】
図1において、車両移動量検出手段16は、上記のように回転検出装置1の出力する信号から車両20の移動量を検出する。具体的には、パルス出力手段5から出力される逓倍された回転パルスにより車両移動量を検出する。この車両移動量の検出は、車輪21のタイヤ径と回転検出装置1から得られるパルス数とで車両移動量を計算することで行う。複数の回転検出装置1の出力を用いる場合は、各回転検出装置1の回転パルスの平均値を用いても良く、いずれか一つの回転検出装置1の出力を主として車両移動量を計算し、他の回転検出装置1の回転パルスによって補正を行うようにしても良い。
【0042】
車両移動制御手段17は、離間距離測定手段14で検出された離間距離と、車両移動量検出手段16で検出された車両移動量とを用いて車両20の移動の制御を行う。車両移動制御手段17による車両20の移動の制御は、例えば、前方に走行する自動運転や、目標位置に対して車両20を駐車させる自動駐車である。車両移動制御手段17は、走行制御部24および駐車制御部25を有しており、走行制御部24は前記前方走行時の自動運転の制御を行い、駐車制御部25は前記自動駐車の制御を行う。これら走行制御部24および駐車制御部25は、コンソールにおける所定の操作スイッチのオン信号等に応答して制御開始され、また上記操作スイッチのオフ信号によって制御を止める。車両移動制御手段17は、この他に、走行方法判定手段23および校正手段19を有している。なお、走行制御部24および駐車制御部25は、必ずしも自動運転の制御を行うものでなくても良く、走行制御の支援や駐車の支援の制御を行うものであっても良い。
【0043】
走行制御部24による自動運転の制御は、例えば、先行車両に対する追随制御である。この追随制御は、先行車両と自車両との車間距離を一定に保つ制御であり、基本的には、車間距離測定手段14で検出された車間距離が一定範囲となるように、速度制御機構26に加速または減速の指令を出力する制御である。走行制御部24は、さらにブレーキ28に制動指令を与える機能を有していても良い。速度制御機構26は、例えばガソリンエンジン車等の内燃機関車ではスロットルバルブであり、電気モータ車ではモータ電流の制御装置である。速度制御機構26は、その電子制御を行う速度制御手段26aを有しており、この速度制御手段26aに、走行速度制御部24の加減速の指令を出力する。
【0044】
走行制御部24は、上記のように車間距離が一定範囲となるように制御するにつき、車間距離測定手段14で検出された車間距離を、回転検出装置1の出力から車両移動量を検出する車両移動量検出手段16によって校正、または補正することで、精度の良い車間距離を得て、制御に用いる。上記の校正を、校正手段19が行う。
【0045】
校正手段19は、前記車両移動量検出手段16で検出した車両移動量と前記離間距離測定手段14で計測した離間距離とを比較として、前記離間距離測定手段14の計測値となる離間距離を校正する手段である。校正手段19は、例えば、一定距離走行時の、前記回転検出装置1で検出し車両移動量検出手段16で求めた走行距離と、離間距離測定手段14で計測した走行距離(すなわち、距離測定開始時と終了時の対象物との距離の差)を比較することで、離間距離測定手段14の計測値となる離間距離を校正する。これにより、先行車両等の対象物との距離が実際にどれだけであるかを正確に求めることができる。
【0046】
この発明において、前記回転検出装置1が、前記車輪を支持する車輪用軸受装置を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダ2と、このエンコーダ2の前記被検出極を検出するセンサ3と、このセンサ3の出力から前記被検出極の位相を逓倍する逓倍手段4と、この逓倍手段4の出力が入力されて、またはこの逓倍手段4の出力および前記センサ3の検出出力が入力されて少なくとも2種類の互いに異なる倍率のパルスを出力するパルス出力手段5とを有し、前記車両移動制御手段17は、前記パルス出力手段5の出力する前記少なくとも1種類の倍率のパルスを用いて車両の移動制御を行い、他方の倍率のパルスによりABS制御を行うものとしてもよい。
【0047】
このとき、車両移動量検出手段16は、前記逓倍手段4で逓倍されたパルス出力を用いて車両移動量を検出するため、前記校正手段19は、前記走行距離を精度良く検出することができる。そのため、車両移動量検出手段16で求めた走行距離と、離間距離測定手段14で計測した走行距離の差を精度良く求めることができ、高精度な校正が行える。
【0048】
走行制御部24は、このように離間距離測定手段14で計測した離間距離を、逓倍手段4を有する回転検出装置1および車両移動量検出手段16で求めた走行距離で校正して精度良く求めた後、離間距離測定手段14の計測する離間距離、または車両移動量検出手段16で検出される走行距離、またはその離間距離および走行距離の両方を用いて車両20の追従制御等の制御を行う。
【0049】
走行制御部24は、上記追随制御に他に、さらに操舵制御機能を有するものとしても良い。操舵制御を行う場合は、舵角センサ18から出力されるハンドルの操舵角度と、回転検出装置1から出力される回転パルスとを用いて、設定規則(図示せず)に従って操舵量を定め、操舵機構27の操舵制御手段27aに出力する。操舵機構27は、車両20の操舵輪の方向を変える機構であり、操舵制御手段27aは操舵信号の入力に応じて操舵機構27を動作させる制御手段である。
【0050】
駐車制御部25は、車両20が、現在の位置,方向から、目標の駐車位置および方向となるように、車両20を移動させて停止させる自動駐車を行う手段である。駐車制御部25を設ける場合、車両20には、周辺を撮像するカメラを設ける。このカメラは、前記離間距離測定手段14を構成するものであっても、離間距離測定手段14とは別に設けられたものであっても良い。駐車制御部25は、前記カメラで撮像した画像を処理して、駐車目標位置に引かれた線や周辺の壁等から目標の駐車位置,駐車方向を定め、車両20の現在の位置,方向から、その目標の駐車位置,駐車方向となるように車両を移動させるための走行距離および操舵量を、設定規則(図示せず)に従って演算し、その目標の駐車位置,駐車方向に移動させる走行速度、走行方向の指令、および操舵方向,操舵量の指令を出力する。自動駐車の開始時および途中において、車両の現在位置の目標位置との距離は、離間距離測定手段14で検出する。この自動駐車において、駐車制御部25は、前記カメラ等の離間距離測定手段14で計測した距離を、回転検出装置1および車両移動量検出手段16によって得た実際の車両移動量を用いて、前記校正手段19で校正する。このように、離間距離測定手段14の検出値を校正することで、精度良く離間距離が検出でき、目標の位置,方向に精度良く、また効率良く駐車させることができる。
【0051】
駐車制御部25において、車両20は前進と後退を切り換えることが必要な場合が多いが、車両20の走行方向は、車両移動制御手段17に設けられた走行方向前後判定手段23を用いて行う。回転検出装置1が、図7と共に前述したように互いに位相が90度異なるA相,B相の位相差信号を出力するものである場合、この位相差信号により回転方向の検出が可能であり、車両走行方向が判定できる。走行方向前後判定手段23は、このA相,B相の位相差信号から車両走行方向を判定する。
【0052】
上記構成の車両制御装置によると、まず、レーザレーダ等の離間距離測定手段14で先行車両等の対象物との距離を把握する。そのうえで、逓倍手段4を有する高分解能の回転検出装置1および車両移動量検出手段16により車両20の移動量を検出する。また、一定距離走行時の高分解能の回転検出装置1および車両移動量検出手段16で求めた実際の走行距離とレーザレーダ等の離間距離測定手段14が求めた走行距離(測定開始時と終了時の対象物の距離の差)を比較することで、対象物との距離が実施にどれだけであるかを、従来に比べて正確に求めることができるようになる。車両移動制御手段17は、上記のように対象物との距離を求めた後、高分解能の回転検出装置1の検出値、またはレーザレーダ等の離間距離測定手段14の検出値を用いて、上記自動運転や自動駐車の車両制御を行う。
【0053】
この車両制御装置によると、上記のように回転検出装置1に逓倍手段4を設けることで、エンコーダ2の検出極の配列ピッチよりも高分解能の回転検出が行える。高分解能の回転検出を行うことで、離間距離測定手段14による誤差を補える程度の車両の移動量検出が精度良く行える。また、回転検出装置1を車輪用軸受に装備することで、車両にコンパクトに、かつ組立工数の増加を抑えて、回転検出装置1の設置が行える。
なお、エンコーダ2が磁気エンコーダである場合、光学式に比べて汚れ等による検知性能の低下は生じ難いが、検出極の配列ピッチを細かくすることが難しい。しかし、上記のように逓倍手段4を設けることで、必要な高分解能を得ることができる。
【0054】
図10は、回転検出装置1の変形例を示す。この回転検出装置1では、パルス出力手段5Aにおける回転パルス出力部として、逓倍手段4の出力から高分解能(高倍率)の回転パルスを出力する高分解能回転パルス出力部6Aと、センサ3の検出出力から得られるパルスを、逓倍手段4を介さずに出力する通常パルス出力部6C’とを有するものとしている。高分解能回転パルス出力部6Aからは例えば40倍の倍率(×40)の回転パルスが出力される。センサ3の検出出力から得られるパルスとは、エンコーダ2の1被検出極に対応して1パルスを出力するパルスである。高分解能回転パルス出力部6Aとして、他の種類の倍率の回転パルスを出力するものを別に有していても良い。その他の構成は図1の実施形態の場合と同様である。
【0055】
図11は、回転検出装置1のさらに他の変形例を示す。この回転検出装置1では、図10の例において、パルス出力手段5Aにおける少なくとも1種類の倍率の回転パルスを出力する高分解能回転パルス出力部として、互いに位相が90度異なるA相の回転パルスとB相の回転パルスとを個別に出力する一対の高分解能回転パルス出力部6AA、6ABを設けたものである。その他の構成は図10の例の場合と同様である。
【0056】
このように、同じ倍率の回転パルス信号として、互いに位相が90度異なるA相,B相の位相差信号を出力することにより、回転方向の検出が可能となる。この回転検出装置1を車両の車輪用軸受に装備した場合には、車両の前進・後退を検出することができる。
【0057】
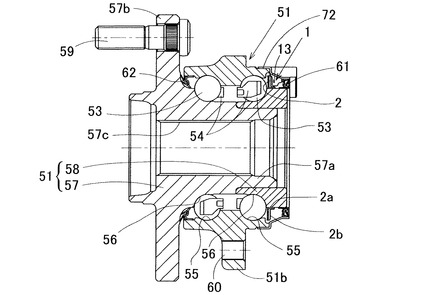
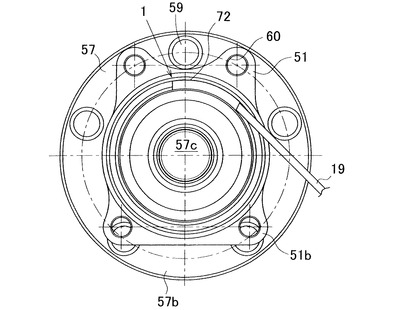
図12、図13は、図3、図4に示した回転検出装置付き車輪用軸受の例において、従動輪用としたものであって、ハブ輪57は中心孔を有しておらず、中実とされている。外方部材51のインボード側の端部は、内方部材52よりも軸方向に延びていて、その端面開口をキャップ74で覆ってある。キャップ74は、外周縁に設けられた鍔部74aで外方部材51の内周に嵌合して取付けられる。このキャップ74に、磁気エンコーダ2に対向するように、センサ部分13が取付けられている。キャップ74には、回転検出装置1の少なくともセンサ部分13が嵌入された状態で、回転検出装置本体が図示外のボルト、ナットなどを用いて着脱可能に設けられる。キャップ74にセンサ部分13が嵌入れされた状態では、このセンサ部分13を覆うモールド材(弾性部材)の弾性によって、回転検出装置本体との間に形成され得るキャップ74の環状隙間がタイトに密封される構成になっている。磁気エンコーダ2は、内輪58の外周に嵌合して取付けられており、回転検出装置1とアキシアル方向に対面する。
【0058】
この構成の場合、従動輪用への適用に限られるが、キャップ74によって外方部材51の端部開口の全体が覆われるので、外部から回転検出装置1の設置部への泥水等の浸入を防止でき、回転検出装置1の信頼性を向上させることができる。
【0059】
図14、図15は、図3、図4に示した回転検出装置付き車輪用軸受の例において、インボード側の軸受空間の密封装置61を、磁気エンコーダ2よりも外部に配置したものである。すなわち、外方部材51に取付けられた環状のセンサ取付部材72と内輪58との間に、接触シール等からなる密封装置61を設けている。
この構成の場合、磁気エンコーダ2が密封装置61により、外部空間に対して密封され、磁気エンコーダ2とセンサ部分13との間に異物を噛み込むこと等が防止される。その他の構成,効果は図3、図4の例と同様である。
【0060】
なお、上記各実施形態の車輪用軸受10は、第3世代型の例について述べたが、この発明の回転検出装置付き車輪用軸受10は、ハブと軸受とが別々に設けられる第1世代型や第2世代型、内方部材がハブ輪と等速ジョイント外輪とで構成される第4世代型の車輪用軸受にも適用でき、また外方部材が回転側で内方部材が固定側の車輪用軸受に適用することもできる。また、アンギュラ玉軸受型に限らず、各種の車輪用軸受に適用することができる。さらに、回転検出装置1における被検出体は、磁気エンコーダに限らず、例えば金属製のギヤ状のパルサリングであっても良い。
【符号の説明】
【0061】
1…回転検出装置
2…エンコーダ
3…センサ
4…逓倍手段
5,5A,5B…パルス出力手段
10…回転検出装置付き車輪用軸受
14…離間距離測定手段
15…車載ECU
16…車両移動量検出手段
17…車両移動制御手段
19…校正手段
20…車両
21…車輪
23…走行方向前後判定手段
24…走行制御部
25…駐車制御部
【特許請求の範囲】
【請求項1】
車輪の回転速度を検出する回転検出装置と、この回転検出装置の出力する信号から車両移動量を検出する車両移動量検出手段と、前記車両とこの車両から測定可能な位置にある対象物との間の離間距離を非接触で計測する離間距離測定手段と、この離間距離測定手段で検出された離間距離と前記車両移動量検出手段で検出された車両移動量とを用いて車両の移動の制御を行う車両移動制御手段とを備えた車両制御装置。
【請求項2】
請求項1において、前記回転検出装置が、前記車輪を支持する車輪用軸受装置を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダと、このエンコーダの前記被検出極を検出するセンサと、このセンサの出力から前記被検出極の位相を逓倍する逓倍手段とを有し、前記車両移動量検出手段は、前記逓倍手段で逓倍さたパルス出力から車両の移動量を検出する車両制御装置。
【請求項3】
請求項1または請求項2において、前記離間距離測定手段が、光学的手法で対象物との間の離間距離を測定するものである車両制御装置。
【請求項4】
請求項1ないし請求項3のいずれか1項において、車両移動量検出手段で検出した車両移動量と前記離間距離測定手段で計測した離間距離とを比較として、前記離間距離測定手段の計測値となる離間距離を校正する校正手段を、前記車両移動制御手段に設けた車両制御装置。
【請求項5】
請求項4において、前記回転検出装置が、前記車輪を支持する車輪用軸受装置を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダと、このエンコーダの前記被検出極を検出するセンサと、このセンサの出力から前記被検出極の位相を逓倍する逓倍手段とを有し、前記校正手段は、前記逓倍手段で逓倍されたパルス出力を用いて前記校正を行う車両制御装置。
【請求項6】
請求項1ないし請求項5のいずれか1項において、前記車両移動制御手段は、前記離間距離測定手段による離間距離の計測後に、車両制御を、前記回転検出装置の検出する回転速度を用いて行う車両制御装置。
【請求項7】
請求項6において、前記回転検出装置が、前記車輪を支持する車輪用軸受装置を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダと、このエンコーダの前記被検出極を検出するセンサと、このセンサの出力から前記被検出極の位相を逓倍する逓倍手段とを有し、前記離間距離測定手段による離間距離の計測後の車両制御を、前記逓倍手段で逓倍されたパルス出力を用いて行う車両制御装置。
【請求項8】
請求項4または請求項5において、前記車両移動制御手段は、前記離間距離測定手段による離間距離の計測後に、車両制御を、前記離間距離測定手段で検出された離間距離を用いて行う車両制御装置。
【請求項9】
請求項1ないし請求項8のいずれか1項において、前記回転検出装置が、前記車輪を支持する車輪用軸受装置を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダと、このエンコーダの前記被検出極を検出するセンサと、このセンサの出力から前記被検出極の位相を逓倍する逓倍手段と、この逓倍手段の出力が入力されて、またはこの逓倍手段の出力および前記センサの検出出力が入力されて少なくとも2種類の互いに異なる倍率のパルスを出力するパルス出力手段とを有し、前記車両移動制御手段は、前記パルス出力手段の出力する前記少なくとも2種類の倍率のパルスを用いて車両の移動制御を行う車両制御装置。
【請求項10】
請求項1ないし請求項8のいずれか1項において、前記回転検出装置が、前記車輪を支持する車輪用軸受装置を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダと、このエンコーダの前記被検出極を検出するセンサと、このセンサの出力から前記被検出極の位相を逓倍する逓倍手段と、この逓倍手段の出力が入力されて、またはこの逓倍手段の出力および前記センサの検出出力が入力されて少なくとも2種類の互いに異なる倍率のパルスを出力するパルス出力手段とを有し、前記車両移動制御手段は、前記パルス出力手段の出力する前記少なくとも1種類の倍率のパルスを用いて車両の移動制御を行い、他方の倍率のパルスによりABS制御を行う車両制御装置。
【請求項11】
請求項9または請求項10において、前記パルス出力手段は、出力する最も低い倍率のパルスが、前記センサの出力するパルス数と同一である車両制御装置。
【請求項12】
請求項1ないし請求項11のいずれか1項において、前記パルス生成手段の生成する少なくとも1種類の倍率のパルスを、互いに位相が異なるA相,B相の位相差信号とした回転検出装置。
【請求項13】
請求項12において、前記パルス出力手段の出力する少なくとも1種類の倍率のパルスを、互いに位相が90度異なるA相,B相の位相差信号とし、前記車両移動制御手段は、車両の移動方向が前後方向のいずれであるかを判定する走行方向前後判定手段を有する車両制御装置。
【請求項14】
請求項1ないし請求項13のいずれか1項において、前記車両移動制御手段が行う車両制御が、前方に走行する自動運転である車両制御装置。
【請求項15】
請求項1ないし請求項13のいずれか1項において、前記車両移動制御手段が行う車両制御が、目標位置に対して車両を駐車させる自動駐車である車両制御装置。
【請求項1】
車輪の回転速度を検出する回転検出装置と、この回転検出装置の出力する信号から車両移動量を検出する車両移動量検出手段と、前記車両とこの車両から測定可能な位置にある対象物との間の離間距離を非接触で計測する離間距離測定手段と、この離間距離測定手段で検出された離間距離と前記車両移動量検出手段で検出された車両移動量とを用いて車両の移動の制御を行う車両移動制御手段とを備えた車両制御装置。
【請求項2】
請求項1において、前記回転検出装置が、前記車輪を支持する車輪用軸受装置を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダと、このエンコーダの前記被検出極を検出するセンサと、このセンサの出力から前記被検出極の位相を逓倍する逓倍手段とを有し、前記車両移動量検出手段は、前記逓倍手段で逓倍さたパルス出力から車両の移動量を検出する車両制御装置。
【請求項3】
請求項1または請求項2において、前記離間距離測定手段が、光学的手法で対象物との間の離間距離を測定するものである車両制御装置。
【請求項4】
請求項1ないし請求項3のいずれか1項において、車両移動量検出手段で検出した車両移動量と前記離間距離測定手段で計測した離間距離とを比較として、前記離間距離測定手段の計測値となる離間距離を校正する校正手段を、前記車両移動制御手段に設けた車両制御装置。
【請求項5】
請求項4において、前記回転検出装置が、前記車輪を支持する車輪用軸受装置を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダと、このエンコーダの前記被検出極を検出するセンサと、このセンサの出力から前記被検出極の位相を逓倍する逓倍手段とを有し、前記校正手段は、前記逓倍手段で逓倍されたパルス出力を用いて前記校正を行う車両制御装置。
【請求項6】
請求項1ないし請求項5のいずれか1項において、前記車両移動制御手段は、前記離間距離測定手段による離間距離の計測後に、車両制御を、前記回転検出装置の検出する回転速度を用いて行う車両制御装置。
【請求項7】
請求項6において、前記回転検出装置が、前記車輪を支持する車輪用軸受装置を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダと、このエンコーダの前記被検出極を検出するセンサと、このセンサの出力から前記被検出極の位相を逓倍する逓倍手段とを有し、前記離間距離測定手段による離間距離の計測後の車両制御を、前記逓倍手段で逓倍されたパルス出力を用いて行う車両制御装置。
【請求項8】
請求項4または請求項5において、前記車両移動制御手段は、前記離間距離測定手段による離間距離の計測後に、車両制御を、前記離間距離測定手段で検出された離間距離を用いて行う車両制御装置。
【請求項9】
請求項1ないし請求項8のいずれか1項において、前記回転検出装置が、前記車輪を支持する車輪用軸受装置を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダと、このエンコーダの前記被検出極を検出するセンサと、このセンサの出力から前記被検出極の位相を逓倍する逓倍手段と、この逓倍手段の出力が入力されて、またはこの逓倍手段の出力および前記センサの検出出力が入力されて少なくとも2種類の互いに異なる倍率のパルスを出力するパルス出力手段とを有し、前記車両移動制御手段は、前記パルス出力手段の出力する前記少なくとも2種類の倍率のパルスを用いて車両の移動制御を行う車両制御装置。
【請求項10】
請求項1ないし請求項8のいずれか1項において、前記回転検出装置が、前記車輪を支持する車輪用軸受装置を構成する回転側輪に設けられて円周方向に並ぶ複数の被検出極が等配された環状のエンコーダと、このエンコーダの前記被検出極を検出するセンサと、このセンサの出力から前記被検出極の位相を逓倍する逓倍手段と、この逓倍手段の出力が入力されて、またはこの逓倍手段の出力および前記センサの検出出力が入力されて少なくとも2種類の互いに異なる倍率のパルスを出力するパルス出力手段とを有し、前記車両移動制御手段は、前記パルス出力手段の出力する前記少なくとも1種類の倍率のパルスを用いて車両の移動制御を行い、他方の倍率のパルスによりABS制御を行う車両制御装置。
【請求項11】
請求項9または請求項10において、前記パルス出力手段は、出力する最も低い倍率のパルスが、前記センサの出力するパルス数と同一である車両制御装置。
【請求項12】
請求項1ないし請求項11のいずれか1項において、前記パルス生成手段の生成する少なくとも1種類の倍率のパルスを、互いに位相が異なるA相,B相の位相差信号とした回転検出装置。
【請求項13】
請求項12において、前記パルス出力手段の出力する少なくとも1種類の倍率のパルスを、互いに位相が90度異なるA相,B相の位相差信号とし、前記車両移動制御手段は、車両の移動方向が前後方向のいずれであるかを判定する走行方向前後判定手段を有する車両制御装置。
【請求項14】
請求項1ないし請求項13のいずれか1項において、前記車両移動制御手段が行う車両制御が、前方に走行する自動運転である車両制御装置。
【請求項15】
請求項1ないし請求項13のいずれか1項において、前記車両移動制御手段が行う車両制御が、目標位置に対して車両を駐車させる自動駐車である車両制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2011−25884(P2011−25884A)
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願番号】特願2009−176182(P2009−176182)
【出願日】平成21年7月29日(2009.7.29)
【出願人】(000102692)NTN株式会社 (9,006)
【Fターム(参考)】
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願日】平成21年7月29日(2009.7.29)
【出願人】(000102692)NTN株式会社 (9,006)
【Fターム(参考)】
[ Back to top ]