
車両制御装置
【課題】停止していたエンジンを始動するときのショックの抑制と応答性の向上とを両立できる車両制御装置を提供すること。
【解決手段】エンジンと、変速機と、変速機を介したエンジンと車両の駆動輪との動力の伝達を接続あるいは遮断するクラッチと、エンジンから駆動輪に対する動力の伝達を許容し、かつ駆動輪からエンジンに対する動力の伝達を遮断するワンウェイクラッチと、を備え、停止していたエンジンを車両の走行中に始動するとき(S11−Y)に、車両の車速と変速機の変速比とに基づいてクラッチの係合タイミングを変化させる(S14〜S18)所定制御を行う。
【解決手段】エンジンと、変速機と、変速機を介したエンジンと車両の駆動輪との動力の伝達を接続あるいは遮断するクラッチと、エンジンから駆動輪に対する動力の伝達を許容し、かつ駆動輪からエンジンに対する動力の伝達を遮断するワンウェイクラッチと、を備え、停止していたエンジンを車両の走行中に始動するとき(S11−Y)に、車両の車速と変速機の変速比とに基づいてクラッチの係合タイミングを変化させる(S14〜S18)所定制御を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両制御装置に関する。
【背景技術】
【0002】
従来、エンジン再始動時のショックを抑制する技術が提案されている。特許文献1には、アイドルストップからのエンジン再始動時のように、自動変速機への入力回転速度が出力回転速度よりも小さい空転状態からのエンジン加速時には、入力回転速度が出力回転速度を越えないように、モータジェネレータを回転数制御する車両の制御装置の技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−235107号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
エンジン再始動時のショックを抑制することについて、なお検討の余地がある。例えば、モータジェネレータを備えない車両において、停止していたエンジンを始動するときのショックを抑制できることが望まれている。また、例えば、停止していたエンジンを車両の走行中に始動するときのショックを抑制できることが望まれている。
【0005】
また、停止していたエンジンを始動するときの応答性を向上できることが望まれている。例えば、加速要求に応じてエンジンを再始動する場合、速やかに駆動力を出力できることが望まれている。
【0006】
本発明の目的は、停止していたエンジンを始動するときのショックの抑制と応答性の向上とを両立できる車両制御装置を提供することである。
【課題を解決するための手段】
【0007】
本発明の車両制御装置は、エンジンと、変速機と、前記変速機を介した前記エンジンと車両の駆動輪との動力の伝達を接続あるいは遮断するクラッチと、前記エンジンから前記駆動輪に対する動力の伝達を許容し、かつ前記駆動輪から前記エンジンに対する動力の伝達を遮断するワンウェイクラッチと、を備え、停止していた前記エンジンを前記車両の走行中に始動するときに、前記車両の車速と前記変速機の変速比とに基づいて前記クラッチの係合タイミングを変化させる所定制御を行うことを特徴とする。
【0008】
上記車両制御装置において、前記クラッチを係合した状態で前記エンジンを始動するとエンジン回転数の上昇中に前記ワンウェイクラッチによる動力の伝達が開始されると予測される場合、前記所定制御において、前記エンジンの始動時にエンジン回転数の上昇が終了するまで前記クラッチの係合タイミングを遅延させることが好ましい。
【0009】
上記車両制御装置において、前記クラッチを係合した状態で前記エンジンを始動するとエンジン回転数の上昇中に前記ワンウェイクラッチによる動力の伝達が開始されると予測される場合、前記所定制御において、前記エンジンの始動時にエンジン回転数が前記車速および前記変速比に基づく回転数に低下するまで前記クラッチの係合タイミングを遅延させることが好ましい。
【0010】
上記車両制御装置において、前記所定制御において、エンジン回転数を前記車速および前記変速比に基づく回転数以下の回転数とするように、前記エンジンによって駆動される補機の負荷を低減させることが好ましい。
【0011】
上記車両制御装置において、前記変速機として、前記ワンウェイクラッチによる動力の伝達がなされる第一の変速段と、前記ワンウェイクラッチによる動力の伝達がなされない第二の変速段とを有する有段変速機を備え、前記第一の変速段では前記エンジンの始動時にエンジン回転数が前記車速および前記第一の変速段の変速比に基づく回転数まで低下しないと予測される場合、前記有段変速機の変速段を前記第二の変速段とし、前記クラッチを係合して前記エンジンを始動することが好ましい。
【0012】
上記車両制御装置において、前記車両に対して加速が要求されている場合、前記クラッチの係合タイミングを遅延させることなく、前記クラッチを係合した状態で前記エンジンを始動することが好ましい。
【発明の効果】
【0013】
本発明に係る車両制御装置は、変速機を介したエンジンと車両の駆動輪との動力の伝達を接続あるいは遮断するクラッチと、エンジンから駆動輪に対する動力の伝達を許容し、かつ駆動輪からエンジンに対する動力の伝達を遮断するワンウェイクラッチと、を備え、停止していたエンジンを車両の走行中に始動するときに、車両の車速と変速機の変速比とに基づいてクラッチの係合タイミングを変化させる所定制御を行う。本発明に係る車両制御装置によれば、車速と変速比とに基づいて適宜クラッチの係合タイミングを変化させることにより、停止していたエンジンを始動するときのショックの抑制と応答性の向上とを両立できるという効果を奏する。
【図面の簡単な説明】
【0014】
【図1】図1は、第1実施形態のエンジン停止中の動作を示すフローチャートである。
【図2】図2は、第1実施形態のエンジン始動中の動作を示すフローチャートである。
【図3】図3は、実施形態に係る車両の概略構成を示す図である。
【図4】図4は、所定制御のタイムチャートである。
【図5】図5は、入力クラッチの係合タイミングを遅延させない場合のタイムチャートである。
【図6】図6は、所定制御において補機負荷を低減する場合のタイムチャートである。
【図7】図7は、第3実施形態のエンジン始動制御のタイムチャートである。
【図8】図8は、エンジン始動時のワンウェイクラッチの同期によるショックの発生を説明するタイムチャートである。
【発明を実施するための形態】
【0015】
以下に、本発明の実施形態に係る車両制御装置につき図面を参照しつつ詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記の実施形態における構成要素には、当業者が容易に想定できるものあるいは実質的に同一のものが含まれる。
【0016】
(第1実施形態)
図1から図5を参照して、第1実施形態について説明する。本実施形態は、車両制御装置に関する。図1は、本実施形態のエンジン停止中の動作を示すフローチャート、図2は、本実施形態のエンジン始動中の動作を示すフローチャート、図3は、実施形態に係る車両の概略構成を示す図である。
【0017】
本実施形態の車両制御装置1−1は、走行中にエンジンを停止して燃料の節約を行う自動車において、エンジン再始動時に自動変速機のクラッチ伝達力をコントロールすることによってショック抑制と応答性確保との両立を行う。
【0018】
本実施形態に係る車両は、1stにワンウェイクラッチを持つ自動変速機を搭載している。自動変速機の入力クラッチを係合状態にしたままでエンジンを再始動すると、エンジン回転数のオーバシュートによってワンウェイクラッチが同期して駆動力が一時的に発生することがある。車両制御装置1−1は、このようにエンジン始動時に一時的に駆動力が発生する可能性がある場合、エンジン回転のオーバシュート後に入力クラッチを係合する。これにより、ワンウェイクラッチの同期によるショックの発生を抑制可能となる。
【0019】
また、車両制御装置1−1は、オーバシュートしてもワンウェイクラッチが同期しない場合、もしくはアクセルが踏み込まれ駆動力が必要な場合は、最初から入力クラッチを係合してエンジンを再始動する。これにより、応答性を重視したエンジン始動を実現する。
【0020】
本実施形態は、以下の構成要素を備えることを前提としている。
【0021】
[ハード構成(制御対象部品)]
(1)エンジン×自動変速機(プラネタリAT)。
(2)入力クラッチをエンジン停止始動状態にかかわらず、電動オイルポンプ等の手段を用いて常時コントロール可能な構成。
【0022】
[制御用ECU構成]
エンジン制御ECU×変速機制御ECU、またはパワートレーン制御ECU。
[入力信号]
アクセル開度、車速、エンジン回転数、エンジン制御用センサ各種センサ信号、変速機入力回転、クラッチ前後回転数、エンジントルク。
[処理出力内容]
クラッチ油圧制御、エンジン制御(燃料、バルブ、EGR、スロットル等)。
【0023】
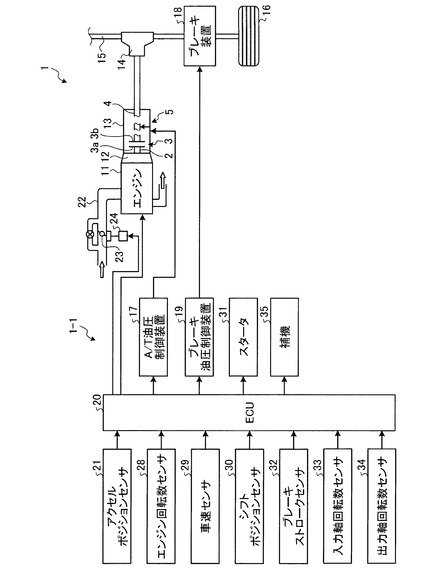
図3に示すように、車両1には、動力源としてのエンジン11が設けられている。エンジン11には、トルクコンバータ12を介して自動変速機13が連結されている。エンジン11の駆動力は、トルクコンバータ12を介して自動変速機13に入力され、デファレンシャルギヤ14及びドライブシャフト15を介して駆動輪16に伝達される。自動変速機13は、A/T油圧制御装置17により車両1の運転状態に応じて変速比が自動的に制御される。自動変速機13は、入力軸2、入力クラッチ3、出力軸4およびワンウェイクラッチ5を有する。入力軸2は、トルクコンバータ12を介してエンジン11の回転が入力される回転軸である。自動変速機13では、入力軸2に入力されるエンジン11の回転が変速されて出力軸4に出力される。出力軸4に出力された回転は、デファレンシャルギヤ14に伝達される。
【0024】
自動変速機13は、複数の変速要素である遊星歯車機構と、クラッチ、ブレーキ等の複数の摩擦係合要素とを組み合わせて構成される有段変速機である。自動変速機13は、各摩擦係合要素を係合あるいは開放することによって変速段を切替えることができる。
【0025】
入力クラッチ3は、入力軸2と出力軸4との間に設けられ、入力軸2と出力軸4との動力の伝達を接続あるいは遮断するクラッチである。すなわち、入力クラッチ3は、エンジン11と駆動輪16との動力伝達経路に配置されたものである。入力クラッチ3は、入力軸2に接続された入力側係合部材3aと、出力軸4側に接続された出力側係合部材3bとを有する。出力側係合部材3bは、複数のクラッチあるいはブレーキ、および遊星歯車機構を介して出力軸4に接続されている。これら複数のクラッチあるいはブレーキをそれぞれ係合あるいは開放することによって、自動変速機13において互いに変速比が異なる複数の変速段を選択的に形成することができる。
【0026】
入力クラッチ3は、自動変速機13において動力の伝達がなされる場合に係合され、動力の伝達がなされない場合に開放される。つまり、自動変速機13においていずれかの変速段が形成されているときに入力クラッチ3が係合されることで、自動変速機13において動力の伝達を行うことができ、入力クラッチ3が開放されていると、動力の伝達が遮断される。つまり、入力クラッチ3は、自動変速機13を介したエンジン11と駆動輪16との動力の伝達を接続あるいは遮断することができるクラッチである。本明細書では、入力クラッチ3を「C1」とも称する。
【0027】
入力クラッチ3は、A/T油圧制御装置17によって供給される係合圧によって制御される。A/T油圧制御装置17は、エンジン11の回転によって駆動されてオイルを吐出するエンジンポンプと、供給される電力によって駆動されてオイルを吐出する電動ポンプとを有する。A/T油圧制御装置17は、エンジン11の運転時には、エンジンポンプから吐出されるオイルを調圧して自動変速機13に供給する。一方、A/T油圧制御装置17は、エコラン制御中は電動ポンプを駆動し、電動ポンプから吐出されるオイルを調圧して自動変速機13に供給する。つまり、入力クラッチ3は、エンジン11を停止して走行しているときにも係合あるいは開放することができる。
【0028】
なお、A/T油圧制御装置17は、車輪の回転と連動して回転する回転部材によって駆動される油圧ポンプを有していてもよい。A/T油圧制御装置17は、例えば、自動変速機13と駆動輪16との間の回転部材によって回転駆動されることでオイルを吐出するポンプを有し、このポンプから吐出されるオイルを調圧して自動変速機13に供給するようにしてもよい。このようにすれば、エンジン11が停止しているときであっても、安定的に自動変速機13に油圧を供給することが可能となる。
【0029】
入力クラッチ3は、A/T油圧制御装置17から供給される係合圧に応じて係合あるいは開放すると共に、係合度合いを制御可能となっている。ここで、係合度合いとは、入力クラッチ3における入力軸2側と出力軸4側との動力の伝達度合いに対応する。すなわち、入力クラッチ3は、入力側係合部材3aと出力側係合部材3bとが係合し、かつ等しい回転数で一体回転する完全係合状態と、入力側係合部材3aと出力側係合部材3bとが係合し、かつ相対回転する半係合状態と、入力側係合部材3aと出力側係合部材3bとが動力を伝達しない開放状態と、に制御可能である。入力クラッチ3は、係合圧に応じて、スリップ量やスリップ率が0の完全係合状態から、スリップ量やスリップ率が最大の開放状態まで任意に制御可能である。
【0030】
ECU20は、入力クラッチ3の前後回転数に基づいて入力クラッチ3の係合状態を制御することができる。入力クラッチ3の前後回転数は、例えば、入力クラッチ3の入力側の回転数および出力側の回転数をそれぞれセンサによって検出するようにしてもよく、入力軸2の回転数および出力軸4の回転数から算出するようにしてもよい。
【0031】
このように、入力クラッチ3は、エンジン11と駆動輪16との動力の伝達を接続あるいは遮断可能である。また、エンジン11と駆動輪16とで動力を伝達するときの入力クラッチ3の係合度合いを制御することで、エンジン11と駆動輪16との動力の伝達度合いを制御可能である。
【0032】
ワンウェイクラッチ5は、エンジン11から駆動輪16に対する動力の伝達を許容し、かつ駆動輪16からエンジン11に対する動力の伝達を遮断するものである。ワンウェイクラッチ5は、例えば、遊星歯車機構の一つのギアの回転を規制することにより、遊星歯車機構における動力の伝達を可能とする。一例として、遊星歯車機構のピニオンギアが入力軸2側に接続され、リングギアが出力軸4側に接続され、サンギアがワンウェイクラッチ5に接続されているとする。この場合に、入力軸2にエンジン11の動力が入力されたときにワンウェイクラッチ5がサンギアの回転を規制することで入力軸2から出力軸4に対する動力の伝達を許容することができる。また、出力軸4から入力軸2に対する動力の伝達に対しては、ワンウェイクラッチ5が空転することで動力の伝達を遮断することができる。このように、ワンウェイクラッチ5が配置された遊星歯車機構では、エンジン11側から駆動輪16側に対する動力の入力に対して、ワンウェイクラッチ5による動力の伝達がなされる。
【0033】
ワンウェイクラッチ5は、例えば、1速変速段を含む低速側の変速段において動力の伝達を行い、かつ高速側の変速段では動力の伝達を行わないものとすることができる。すなわち、低速側の変速段では、ワンウェイクラッチ5が配置された遊星歯車機構においてエンジン11から駆動輪16に対する動力の伝達がなされ、かつ高速側の変速段ではワンウェイクラッチ5が配置された遊星歯車機構においてエンジン11から駆動輪16に対する動力の伝達がなされないように、各クラッチおよびブレーキが制御されるものとしてもよい。本実施形態では、ワンウェイクラッチ5は、動力の伝達経路における入力クラッチ3よりも出力軸4側に配置されている。
【0034】
ブレーキ装置18は、車両1の各車輪に設けられている。運転者は、図示しないブレーキペダルに対する操作により、ブレーキ装置18を作動させ、ブレーキ装置18によって制動力を発生させることができる。また、ブレーキ装置18は、ブレーキ油圧制御装置19によって制御されて、車両1を制動することもできる。
【0035】
車両1には、エンジン11や自動変速機13やブレーキ装置18などを制御する電子制御ユニット(ECU)20が設けられている。ECU20は、エンジン11、自動変速機13(A/T油圧制御装置17)及びブレーキ装置18(ブレーキ油圧制御装置19)の総合的な制御を行う。本実施形態の車両制御装置1−1は、エンジン11と、入力クラッチ3およびワンウェイクラッチ5を含む自動変速機13と、ECU20とを備える。
【0036】
車両1には、アクセルペダルの操作量(アクセル開度)を検出するアクセルポジションセンサ21が設けられている。アクセルポジションセンサ21により検出されたアクセル開度を示す信号は、ECU20に出力される。エンジン11の吸気管22に設けられたスロットルコントロールバルブ23は、スロットルアクチュエータ24により開閉可能とされている。
【0037】
エンジン11には、エンジン回転数(エンジン回転速度)を検出するエンジン回転数センサ28が設けられている。車速センサ29は、車両1の車速を検出する。シフトポジションセンサ30は、運転者が操作するシフトレバーの位置(シフトポジション)を検出する。ブレーキストロークセンサ32は、ブレーキペダルの踏込み量(ペダルストローク)を検出する。入力軸回転数センサ33は、自動変速機13の入力軸2の回転数を検出する。出力軸回転数センサ34は、自動変速機13の出力軸4の回転数を検出する。各センサ28,29,30,32,33,34の検出結果を示す信号は、ECU20に出力される。
【0038】
ECU20は、変速マップを有しており、スロットル開度、車速などに基づいて、自動変速機13の変速段を決定し、この決定された変速段を成立させるようにA/T油圧制御装置17を制御することができる。
【0039】
エンジン11には、スタータ31が設けられている。スタータ31は、エンジン11を始動する始動装置である。スタータ31は、エンジン始動時にエンジン11の回転軸に対して動力を伝達可能に接続される。スタータ31は、例えば、DCモータを有し、バッテリからの電力を消費して動力を出力し、この動力によってエンジン11を回転させることができる。スタータ31は、ECU20に接続されており、ECU20によって制御される。
【0040】
エンジン11は、エンジン11によって駆動される補機35を備える。補機35は、エンジン11の回転軸と動力を伝達可能に設けられており、エンジン11から伝達される動力により作動する。補機35は、例えば、オルタネータやエアコンのコンプレッサを含む。補機35は、ECU20に接続されており、ECU20によって制御される。
【0041】
ECU20は、エンジン11に対する燃料の供給を停止して惰性により車両1を走行させるエコラン制御を実行可能である。エコラン制御は、例えば、車両1の走行中にアクセルオフされた場合に実行されるものである。エコラン制御中は、燃料が消費されないため、エコラン制御を実行することで燃費の向上を図ることができる。なお、エコラン制御は、走行中に限らず、車両1の停車中に実行されてもよい。
【0042】
ECU20は、例えば、アクセルポジションセンサ21の検出結果に基づき、アクセルオフと判定するとエコラン制御を実行する。エコラン制御を実行する場合、ECU20は、エンジン11に対する燃料の供給を停止してエンジン11の運転を停止する。ここで、エンジン11の運転とは、エンジン11に対して燃料が供給されて、エンジン11が自立的に回転する作動状態を示す。エンジン11の運転が停止されると、エンジン11は被駆動状態あるいは回転が停止した動作停止状態となる。燃料の供給が停止されたエンジン11は、駆動輪16との間で動力が伝達される状態であれば駆動輪16の回転によって駆動される被駆動状態となり、駆動輪16との間で動力が伝達されない状態であれば、回転を停止する。
【0043】
ECU20は、エコラン制御時において、入力クラッチ3を開放し、エンジン11の回転を停止させて車両1を走行させることができる。このようにエコラン制御時に入力クラッチ3を開放すると、車両1は、自動変速機13を介したエンジン11と駆動輪16との動力の伝達経路が遮断され、エンジンブレーキが作用しないフリーラン状態となる。フリーラン状態では、走行抵抗が小さくなり、燃費の向上が可能となる。
【0044】
エコラン制御の実行中に、エコラン制御から復帰する復帰条件が成立すると、ECU20は、エンジン11を再始動させる。ECU20は、例えば、アクセルが踏み込まれた場合など、エンジン11に対する再始動要求、あるいは車両1に対する加速要求の少なくともいずれか一方の要求があった場合に、車両1をエコラン制御から復帰させる。また、ECU20は、車両1の状態に基づいてエコラン制御から復帰させてもよい。ECU20は、例えば、バッテリの充電量が低下したときに車両1をエコラン制御から復帰させるようにしてもよい。
【0045】
車両1をエコラン制御から復帰させる場合、ECU20は、走行中に入力クラッチ3を係合状態とし、スタータ31によって停止していたエンジン11を始動する。入力クラッチ3を係合状態としてエンジン11を始動することで、エンジン11の始動後に入力クラッチ3を係合する場合よりも応答性を向上させることができる。例えば、運転者による加速要求がなされているときに、エンジン始動後に即座に駆動力を発生させることができ、加速要求に対する応答性を向上させることができる。
【0046】
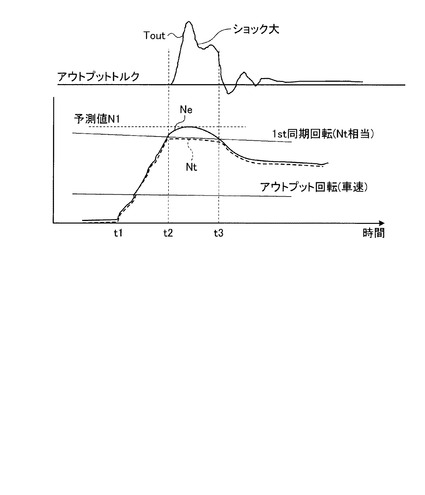
ここで、入力クラッチ3を係合した状態でエンジン11を始動する場合、エンジン回転のオーバシュートによってワンウェイクラッチ5が同期し、駆動力が一時的に発生することがある。図8は、エンジン始動時のワンウェイクラッチ5の同期によるショックの発生を説明するタイムチャートである。
【0047】
図8において、符号Neはエンジン回転数、Ntは自動変速機13の入力軸2の回転数、Toutは出力軸4に対して出力されるアウトプットトルクを示す。本実施形態では、入力軸2の回転数を単に「入力軸回転数Nt」とも記載する。図8には、自動変速機13の変速段が1速変速段である場合の各回転数およびアウトプットトルクが示されている。
【0048】
1速変速段では、エンジン11の運転が停止されてエンジン11が動力を出力していないと、ワンウェイクラッチ5が空転する。これにより、エンジン11の再始動が開始される時刻t1よりも前はエンジン回転数Neおよび入力軸回転数Nt共に0である。時刻t1にスタータ31によってエンジン11の始動が開始されると、エンジン回転数Neおよび入力軸回転数Ntが共に上昇する。ここで、入力軸回転数Ntが、1速変速段における同期回転数に到達すると、ワンウェイクラッチ5が同期することによって、入力軸回転数Ntの更なる上昇が規制される。
【0049】
本実施形態では、n速変速段(n=1,2,3…)における同期回転数を単に「n速同期回転数」と記載する。例えば、1速同期回転数は、自動変速機13の変速段を1速変速段としている場合に、ワンウェイクラッチ5が配置された遊星歯車機構において、入力軸2側の回転数が出力軸4側の回転数と同期する入力軸回転数Ntである。入力軸回転数Ntが1速同期回転数まで上昇すると、ワンウェイクラッチ5が同期して入力軸2から出力軸4に対する動力の伝達がなされ、入力軸回転数Ntの更なる上昇が規制される。
【0050】
従って、時刻t2に入力軸回転数Ntが1速同期回転数に到達すると、その後は入力軸回転数Ntが1速同期回転数に沿って推移する。一方、エンジン回転数Neは、時刻t2以降も上昇を続ける。これにより、アウトプットトルクToutが大きく上昇してショックが生じてしまう。エンジン始動時におけるショックの発生を抑制できることが望ましい。ここで、n速同期回転数は、車速および変速比に応じて変化するものである。ECU20は、自動変速機13の油温、内部回転(イナーシャトルク)等に基づいてn速同期回転数を予測することができる。例えば、ECU20は、自動変速機13の油温やイナーシャトルクとn速同期回転数との対応関係を示すマップを予め記憶しており、このマップを参照してn速同期回転数を算出することができる。
【0051】
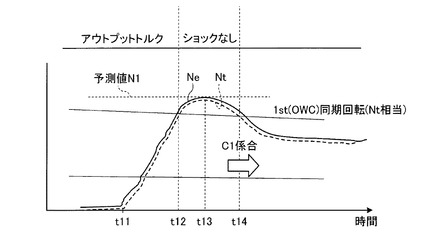
本実施形態の車両制御装置1−1は、停止していたエンジン11を走行中に始動するときに、車両1の車速と自動変速機13の変速比とに基づいて入力クラッチ3の係合タイミングを変化させる所定制御を行う。この所定制御は、エンジン再始動時のショックの抑制と応答性の向上とを両立できるように入力クラッチ3の係合タイミングを変化させるものである。エンジン再始動時における入力クラッチ3の係合タイミングを早めれば、加速要求に対する応答性を向上させることができる。一方、状況に応じて、車速および変速比に基づいてエンジン再始動時における入力クラッチ3の係合タイミングを遅延させることでショックの発生を抑制することができる場合がある。
【0052】
ECU20は、入力クラッチ3を係合した状態でエンジン11を始動するとエンジン回転数Neの上昇中にワンウェイクラッチ5による動力の伝達が開始されると予測される場合、所定制御において入力クラッチ3の係合タイミングを遅延させる。具体的には、エンジン11の始動時にエンジン回転数Neの上昇が終了するまで入力クラッチ3の係合タイミングを遅延させる。一例として、ECU20は、エンジン回転数Neが低下し始めるまで入力クラッチ3の係合タイミングを遅延させる。
【0053】
より好ましくは、ECU20は、エンジン回転数Neが1速同期回転数に対応する回転数に低下するまで入力クラッチ3の係合タイミングを遅延させる。本実施形態では、ECU20は、エンジン回転数Neが1速同期回転数に対応する回転数まで低下したとき(時刻t3)に入力クラッチ3を係合する。この1速同期回転数に対応するエンジン回転数Neは、車速および変速比に基づく回転数に対応している。ECU20は、所定制御により、エンジン始動時のアウトプットトルクToutの発生を抑制し、ドライバビリティを向上させることができる。
【0054】
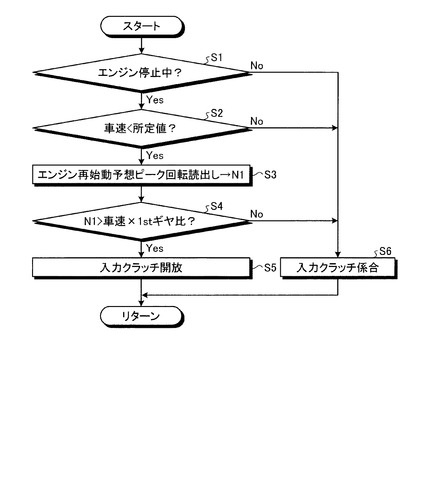
図1、図2および図4を参照して、本実施形態の車両制御装置1−1による制御について説明する。図4は、本実施形態の車両制御装置1−1による所定制御のタイムチャートである。図1に示す制御フローは、エコラン制御中に実行されるものであり、例えば、所定の間隔で繰り返し実行される。
【0055】
まず、ステップS1では、ECU20により、エンジン停止中であるか否かが判定される。ECU20は、例えば、エンジン回転数センサ28の検出結果に基づいてステップS1の判定を行う。その判定の結果、エンジン停止中であると判定された場合(ステップS1−Y)にはステップS2に進み、そうでない場合(ステップS1−N)にはステップS6に進む。
【0056】
ステップS2では、ECU20により、車速が所定値未満であるか否かが判定される。ある程度以上に車速が高い場合、n速同期回転数が高回転となり、エンジン11の始動時のオーバシュートによってもワンウェイクラッチ5の同期が生じないと判定することができる。ステップS2における判定のための所定値は、例えば、エンジン11の始動時における入力軸回転数Ntが到達し得る最大の回転数に基づいて定めることができる。ステップS2の判定の結果、車速が所定値未満であると判定された場合(ステップS2−Y)にはステップS3に進み、そうでない場合(ステップS2−N)にはステップS6に進む。
【0057】
ステップS3では、ECU20により、エンジン再始動予想ピーク回転が読み出され、予測値N1に代入される。ECU20は、エンジン再始動時の条件に応じた予想ピーク回転数を予めマップ等として記憶している。エンジン11の再始動時におけるピーク回転数は、エンジン油温や冷却水温、外気温等の条件によって変化する。ECU20は、ピーク回転数に影響する条件を取得し、取得した条件に基づいて読み出した予想ピーク回転数を予測値N1とする。ステップS3が実行されると、ステップS4に進む。なお、ECU20は、予測値N1と、実際のエンジン回転数Neの履歴とに基づいて予測値N1のマップを補正するようにしてもよい。また、ECU20は、n速同期回転数のマップを補正するようにしてもよい。例えば、入力クラッチ3を係合したときの入力軸回転数Ntやエンジン回転数Neの推移に基づいてn速同期回転数のマップを補正することが可能である。
【0058】
ステップS4では、ECU20により、予測値N1が変速比(ギヤ比)に基づく入力軸回転数Ntよりも大であるか否かを判定する。本実施形態では、エンジン11の再始動時に1速変速段を選択する場合について説明する。ECU20は、車速と1速変速段の変速比との積で決まる入力軸回転数Ntである1速同期回転数と、ステップS3で算出した予測値N1との比較結果に基づいてステップS4の判定を行う。なお、車速とは、出力軸4の回転数を示すものである。その判定の結果、予測値N1が1速同期回転数よりも大であると判定された場合(ステップS4−Y)にはステップS5に進み、そうでない場合(ステップS4−N)にはステップS6に進む。
【0059】
ステップS5では、ECU20により、入力クラッチ3が開放される。ECU20は、エンジン11の再始動前に入力クラッチ3を開放し、ワンウェイクラッチ5の同期によるショックの発生を未然に抑制する。ステップS5が実行されると、本制御フローは終了する。
【0060】
ステップS6では、ECU20により、入力クラッチ3が係合される。ECU20は、入力クラッチ3を係合しておくことで、エンジン11の再始動時の応答性の向上を図る。
【0061】
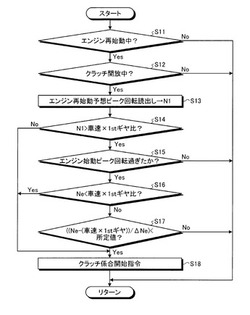
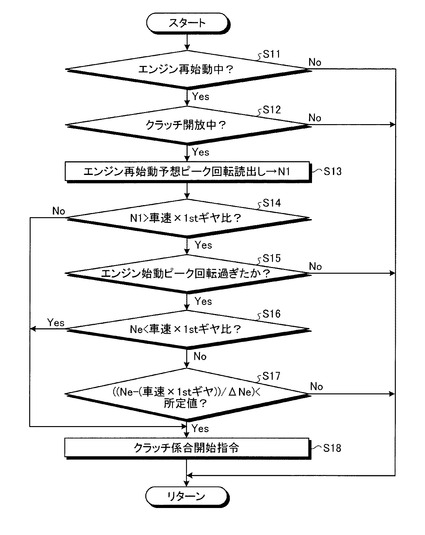
図2に示す制御フローは、エンジン11の再始動判定がなされた場合に実行されるものであり、例えば、所定の間隔で繰り返し実行される。
【0062】
まず、ステップS11では、ECU20により、エンジン再始動中であるか否かが判定される。図4では、時刻t11においてエンジン11の再始動が開始される。ステップS11の判定の結果、エンジン再始動中であると判定された場合(ステップS11−Y)にはステップS12に進み、そうでない場合(ステップS11−N)には本制御フローは終了する。
【0063】
ステップS12では、ECU20により、クラッチ開放中であるか否かが判定される。ステップS12では、入力クラッチ3が予め開放されているか否かが判定される。図1に示す制御フローのステップS5で予め入力クラッチ3が開放されている場合、ステップS13以降において入力クラッチ3の係合タイミングを遅延させる所定制御が実行される。ステップS12の判定の結果、クラッチ開放中であると判定された場合(ステップS12−Y)にはステップS13に進み、そうでない場合(ステップS12−N)には本制御フローは終了する。
【0064】
ステップS13では、ECU20により、エンジン再始動予想ピーク回転が読み出され、予測値N1に代入される。ECU20は、現時点におけるエンジン再始動予想ピーク値によって予測値N1を更新する。ステップS13が実行されると、ステップS14に進む。
【0065】
ステップS14では、ECU20により、予測値N1が1速変速段の変速比に基づく入力軸回転数Ntよりも大であるか否かが判定される。ECU20は、ステップS13で更新された予測値N1が、現在車速に基づく1速同期回転数よりも大であるか否かを判定する。その判定の結果、予測値N1が1速変速段の変速比に基づく入力軸回転数Ntよりも大であると判定された場合(ステップS14−Y)にはステップS15に進み、そうでない場合(ステップS14−N)にはステップS18に進む。
【0066】
ステップS15では、ECU20により、エンジン始動ピーク回転が過ぎたか否かが判定される。ECU20は、エンジン回転数センサ28の検出結果に基づいてステップS15の判定を行うことができる。図4では、時刻t13においてエンジン回転数Neがピークとなり、その後にステップS15において肯定判定がなされるようになる。ステップS15の判定の結果、エンジン始動ピーク回転数が過ぎたと判定された場合(ステップS15−Y)にはステップS16に進み、そうでない場合(ステップS15−N)には本制御フローは終了する。
【0067】
ステップS16では、ECU20により、エンジン回転数Neが車速および1速変速段の変速比に基づく入力軸回転数Ntよりも小であるか否かが判定される。ステップS16では、エンジン回転数Neが1速同期回転数未満に低下したか否かが判定される。入力軸回転数Ntはエンジン回転数Ne以下の回転数となるものであるため、エンジン回転数Neが1速同期回転数未満であれば、入力軸回転数Ntも1速同期回転数未満の状態である。ステップS16の判定の結果、エンジン回転数Neが1速変速段の変速比に基づく入力軸回転数Ntよりも小であると判定された場合(ステップS16−Y)にはステップS18に進み、そうでない場合(ステップS16−N)にはステップS17に進む。なお、ステップS16の判定では、エンジン回転数Neに代えて、入力軸回転数Ntと1速同期回転数との比較を行うようにしてもよい。
【0068】
ステップS17では、ECU20により、エンジン回転数Neの低下勾配に基づく判定がなされる。ECU20は、低下勾配から入力軸回転数Ntがワンウェイクラッチ5の同期回転数を下回る時間を予測して、係合開始指令を出力するか否かを判定する。具体的には、ECU20は、下記式(1)が成立する場合、クラッチ係合開始の指令を出力する。
(Ne−(車速×1stギヤ))/ΔNe < 所定値…(1)
【0069】
上記式(1)の左辺において、ΔNeは、エンジン回転数Neの変化速度であり、例えば、単位時間あたりのエンジン回転数Neの低下量の大きさを示す。つまり、上記式(1)の左辺は、エンジン回転数Neが1速同期回転数に低下するまでの所要時間を示す。また、上記式(1)の右辺の所定値は、入力クラッチ3に対する係合開始指令が出力されてから実際に入力クラッチ3が係合するまでの所要時間に基づいて定められている。本実施形態では、ECU20は、エンジン回転数Neが1速同期回転数に一致するタイミングと、入力クラッチ3が係合するタイミングとが同期するように、入力クラッチ3に対する係合指令を出力する。ステップS17の判定の結果、上記式(1)が成立すると判定された場合(ステップS17−Y)にはステップS18に進み、そうでない場合(ステップS17−N)には本制御フローは終了する。
【0070】
ステップS18では、ECU20により、クラッチ係合開始指令が出力される。ECU20は、入力クラッチ3に対して、係合開始指令を出力する。A/T油圧制御装置17は、入力クラッチ3を係合させるべく入力クラッチ3に対して油圧を供給する。図4では、エンジン回転数Neが1速同期回転数のラインとクロスする時刻t14において入力クラッチ3(C1)が係合される。ECU20は、例えば、ワンウェイクラッチ5の同期によるショックの発生を抑制できるように、半係合状態を経て完全係合するように入力クラッチ3を係合させる。ステップS18が実行されると、本制御フローは終了する。
【0071】
以上説明したように、本実施形態の車両制御装置1−1によれば、エコラン制御中にエンジン11を再始動する時に、入力クラッチ3を係合した状態でエンジン11を始動するとエンジン回転数Neの上昇中にワンウェイクラッチ5による動力の伝達が開始されると予測される場合、所定制御において、入力クラッチ3の係合タイミングが遅延される。これにより、エンジン11の再始動時のショックの発生が抑制され、ドライバビリティの向上を図ることができる。
【0072】
なお、ステップS17において、エンジン回転数Neが1速同期回転数に低下するまでの所要時間が大きすぎる場合や、エンジン回転数Neが1速同期回転数まで低下しないと予測された場合にもステップS18に進んで入力クラッチ3を係合させるようにしてもよい。例えば、エンジン始動中に車速が低下した場合など、予測に反してエンジン回転数Neが1速同期回転数まで低下しなくなる可能性もある。こうした場合には、所定制御を終了して入力クラッチ3を係合することができる。
【0073】
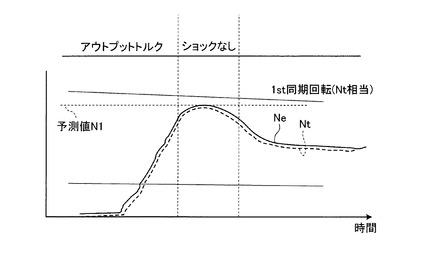
また、車両制御装置1−1は、入力クラッチ3を係合した状態でエンジン11を始動してもエンジン回転数Neの上昇中にワンウェイクラッチ5による動力の伝達が開始されると予測されない場合は、入力クラッチ3を係合した状態でエンジン11を再始動する。図5は、本実施形態において入力クラッチ3の係合タイミングを遅延させない場合のタイムチャート、言い換えると、エンジン回転数Neの上昇中にワンウェイクラッチ5による動力の伝達が開始されると予測されない場合のタイムチャートである。
【0074】
予測値N1が1速同期回転数以下である場合(S4−N)、ECU20は入力クラッチ3を係合させた状態でエンジン11を再始動する。言い換えると、エンジン11の再始動時にエンジン回転数Neがアイドル回転数に対してオーバシュートしてもワンウェイクラッチ5が同期しないと予測できた場合、入力クラッチ3を係合した状態でエンジン11を始動する。この場合、エンジン11の始動完了時に入力クラッチ3が既に係合しているため、加速要求がなされた場合に高応答で駆動力を出力することができる。また、入力軸回転数Ntが1速同期回転数を超えてしまう可能性は小さく、ワンウェイクラッチ5の同期によるショックの発生が抑制される。
【0075】
また、本実施形態では、ECU20は、運転者がアクセルを踏み込み、駆動力が必要な場合は、入力クラッチ3を係合した状態でエンジン11を再始動する。車両1に対して加速が要求されている場合、エンジン回転数の上昇中にワンウェイクラッチ5による動力の伝達が開始されるか否かにかかわらず、入力クラッチ3の係合タイミングを遅延させることなく、入力クラッチ3を係合した状態でエンジン11を始動する。
【0076】
ECU20は、例えば、スタータ31によってエンジン11の始動を開始するときに入力クラッチ3を係合状態とする。これにより、運転者のアクセルONの操作に対する車両1の加速応答性を向上させることができる。なお、ECU20は、運転者によってアクセルが踏み込まれている場合、要求トルクや要求加速度に基づいて所定制御において入力クラッチ3の係合タイミングを遅延させるか否かを決定するようにしてもよい。例えば、アクセル開度および車速に基づく要求トルクが所定トルク以上である場合に、入力クラッチ3の係合タイミングを遅延させることを禁止して入力クラッチ3を係合した状態でエンジン11を再始動するようにしてもよい。
【0077】
なお、本実施形態では、自動変速機13を介したエンジン11と駆動輪16との動力の伝達を接続あるいは遮断するクラッチが、自動変速機13の入力クラッチ3であったが、これには限定されない。エンジン11と駆動輪16との動力の伝達を接続あるいは遮断するクラッチは、入力クラッチ3以外の自動変速機13のクラッチであってもよく、自動変速機13の外部に設けられたクラッチであってもよい。例えば、トルクコンバータ12の出力軸と自動変速機13の入力軸2との間にクラッチを介在させてもよく、自動変速機13の出力軸4よりも駆動輪16側にクラッチが配置されてもよい。
【0078】
本実施形態のワンウェイクラッチ5は、自動変速機13の内部に設けられているが、ワンウェイクラッチ5の位置はこれには限定されない。ワンウェイクラッチ5は、例えば、自動変速機13よりもエンジン11側に配置されていてもよく、あるいは自動変速機13よりも駆動輪16側に配置されていてもよい。つまり、ワンウェイクラッチ5は、自動変速機13を介したエンジン11と駆動輪16との動力の伝達経路に配置され、エンジン11から駆動輪16に対する動力の伝達を許容し、かつ駆動輪16からエンジン11に対する動力の伝達を遮断するものであればよい。
【0079】
(第1実施形態の変形例)
第1実施形態の変形例について説明する。上記第1実施形態では、エンジン回転数Neのオーバシュート後に、エンジン回転数Neがn速同期回転数まで低下したタイミングで入力クラッチ3を係合したが、入力クラッチ3を係合するタイミングは、これには限定されない。ショックの発生を抑制する観点からは、エンジン回転数がn速同期回転数に等しくなるタイミングと入力クラッチ3の係合タイミングとを一致させることが望ましいが、入力クラッチ3の係合タイミングは、その前後のタイミングとされてもよい。
【0080】
例えば、入力クラッチ3の係合タイミングは、運転者の駆動要求に関連するパラメータに基づいて可変とされてもよい。駆動要求に関連するパラメータは、例えば、アクセル開度、アクセル開度の変化速度、要求トルクや要求駆動力等である。運転者の加速要求が大きい場合、加速要求が小さい場合よりも入力クラッチ3の係合タイミングを早めるようにすることができる。例えば、加速要求が大きいほど、エンジン回転数がn速同期回転数に等しくなるタイミングに対して入力クラッチ3の係合タイミングを早めるようにすればよい。このようにすれば、ショックの抑制と応答性の向上とに加速要求に応じた重み付けを行うことができる。
【0081】
なお、入力クラッチ3の係合タイミングは、運転者の操作によるものに限らず、駆動要求に関連するパラメータに基づいて可変とされてもよい。例えば、入力クラッチ3の係合タイミングは、車両1の走行制御に基づく加速要求に応じて早められてもよい。また、入力クラッチ3の係合タイミングは、運転者の走行指向に応じて可変とされてもよい。例えば、加減速時に加速度の大きな変化を要求する運転者の場合、加速度の大きな変化を要求しない運転者の場合よりも入力クラッチ3の係合タイミングを早めるようにしてもよい。
【0082】
(第2実施形態)
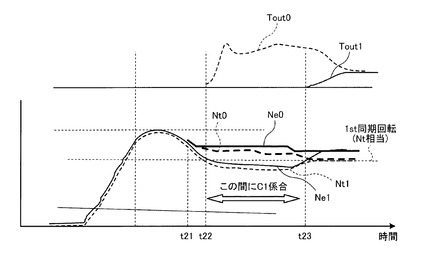
図6を参照して、第2実施形態について説明する。第2実施形態については、上記実施形態で説明したものと同様の機能を有する構成要素には同一の符号を付して重複する説明は省略する。本実施形態において、上記第1実施形態と異なる点は、定常的にワンウェイクラッチ5が同期するエンジン回転数Neの場合は、入力クラッチ3の係合までエンジン回転数Neを同期回転に対し若干下回る回転数に低下させるように制御する点である。このために、本実施形態の所定制御では、エンジン11の再始動時に入力クラッチ3を係合するまで補機35を一瞬切ることで、エンジン回転数Neを低減させる。つまり、本実施形態では、車両制御装置1−1は、エンジン始動後にエンジン回転数Neがn速同期回転数まで低下しないと予測される場合、補機35の負荷を低減させる。
【0083】
図6は、所定制御において補機負荷を低減する場合のタイムチャートである。なお、本実施形態の制御は、上記第1実施形態(図1)のステップS4において、予測値N1が1速変速段の変速比に基づく入力軸回転数Ntよりも大であると判定され(ステップS4−Y)、入力クラッチ3が開放された状態でエンジン11の再始動が開始される場合になされるものである。
【0084】
図6において、符号Ne0、Nt0およびTout0は、それぞれ本実施形態の制御がなされない場合のエンジン回転数、入力軸回転数およびアウトプットトルクを示す。また、符号Ne1、Nt1およびTout1は、それぞれ本実施形態の制御がなされる場合のエンジン回転数、入力軸回転数およびアウトプットトルクを示す。
【0085】
本実施形態では、ECU20は、エンジン11の再始動前あるいはエンジン11の再始動中に、エンジン始動後のエンジン回転数の推移を予測する。エンジン始動後のエンジン回転数は、例えば、車速と、自動変速機13の変速段と、補機35の負荷とに基づいて算出することができる。例えば、1速変速段でエンジン11を再始動する場合を例に説明すると、ECU20は、再始動時にオーバシュートした後のエンジン回転数Ne0が、1速同期回転数以下の回転数まで低下するか否かを予測する。その結果、エンジン回転数Ne0が1速同期回転数を上回る回転数で推移する、すなわち定常的にワンウェイクラッチ5が同期するエンジン回転数となると予測した場合は、補機35の負荷を低減させる。
【0086】
ECU20は、入力クラッチ3が係合するまでエンジン回転数Neを1速同期回転数に対し若干下回る回転数とするように、補機35を一時的にオフとする。ECU20は、例えば、エアコンの電源をオフとすることや、オルタネータの発電量を0とすることによってエンジン11に対する補機35の負荷トルクを低減させる。これにより、エンジン11に対する要求トルクが低減することで、エンジン11の回転数が低下する。図6では、時刻t21において補機35がオフとされ、エンジン回転数Ne1および入力軸回転数Nt1が低下しはじめる。時刻t22以降は、エンジン回転数Ne1が1速同期回転数を下回るようになり、ワンウェイクラッチ5が空転する。
【0087】
ECU20は、ワンウェイクラッチ5の同期が解除される時刻t22以降に入力クラッチ3を係合させる。これにより、入力クラッチ3を係合するときのショックの発生が抑制される。例えば、本実施形態の補機35の負荷を低減させる制御がなされない場合、時刻t22において入力クラッチ3を係合させると、エンジン回転数Ne0と1速同期回転数との回転数差が大きな状態で入力クラッチ3を係合することとなる。これにより、アウトプットトルクTout0の変動が大きなものとなり、ショックの発生によりドライバビリティの低下を招くことがある。
【0088】
これに対して、本実施形態では、エンジン回転数Ne1が1速同期回転数を下回る時刻t22以降に入力クラッチ3を係合することで、ワンウェイクラッチ5を同期させることなく入力クラッチ3を係合することができる。また、入力クラッチ3の係合後に補機35の負荷を低減前の負荷まで増加させることで、時刻t23においてエンジン回転数Ne1が1速同期回転数を超える。このときは、1速同期回転数とエンジン回転数Ne1との回転数差がない状態でワンウェイクラッチ5が同期することで、アウトプットトルクTout1の急激な変動が生じることはない。
【0089】
このように、本実施形態の補機35の制御によればショックの発生を抑制しつつ入力クラッチ3を係合することができる。なお、補機35の負荷を低減させる制御は、エンジン回転数Ne0が1速同期回転数を上回る回転数で推移することを事前に予測した場合に限らず実行することができる。例えば、エンジン回転数Neがオーバシュート後に1速同期回転数を下回ると予測されたものの、実際のエンジン回転数Neが1速同期回転数を上回って推移したときに、補機35の負荷を低減させる制御が実行されてもよい。
【0090】
本実施形態の補機35の制御は、入力クラッチ3を係合するまでに所定の時間を要する。このため、高応答のニーズがない場合、例えばアクセルオンされていない場合に実行されることが好ましい。
【0091】
(第3実施形態)
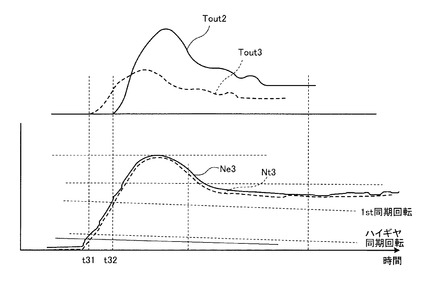
図7を参照して、第3実施形態について説明する。第3実施形態については、上記実施形態で説明したものと同様の機能を有する構成要素には同一の符号を付して重複する説明は省略する。図7は、本実施形態のエンジン始動制御のタイムチャートである。本実施形態において、上記各実施形態と異なる点は、ワンウェイクラッチ5を同期させないために必要な回転数域まで一時的であってもエンジン回転数Neを低下させられない場合、ハイギヤを出力することによってショックの発生を抑制する点である。
【0092】
ECU20は、エンジン始動後にエンジン回転数Neが同期回転数まで低下しないと予測される場合、ハイギヤを出力する。このハイギヤは、ワンウェイクラッチ5による動力の伝達がなされない変速段である。すなわち、本実施形態では、ワンウェイクラッチ5による動力の伝達がなされる変速段ではワンウェイクラッチ5の同期によるショックの発生が避けられない場合、ワンウェイクラッチ5による動力の伝達が生じない変速段でエンジン11を始動する。
【0093】
本実施形態では、自動変速機13が5速変速可能なものであって、かつ1速変速段から3速変速段ではワンウェイクラッチ5による動力の伝達がなされ、4速変速段および5速変速段ではワンウェイクラッチ5による動力の伝達がなされないものである場合について説明する。1速変速段から3速変速段は、ワンウェイクラッチ5による動力の伝達がなされる第一の変速段に対応し、4速変速段および5速変速段は、ワンウェイクラッチ5による動力の伝達がなされない第二の変速段に対応する。
【0094】
ECU20は、エンジン11を停止して走行中に、1速変速段から3速変速段のうち、エンジン11の始動後にエンジン回転数Neが同期回転数未満に低下すると予測される変速段が存在するか否かを判定する。本実施形態では、エンジン11の始動後にエンジン回転数Neが同期回転数未満に低下すると予測される変速段を単に「所定制御可能な変速段」と記載する。ECU20は、判定の結果、所定制御可能な変速段が存在する場合、上記各実施形態の所定制御を実行する。
【0095】
一方、ECU20は、所定制御可能な変速段が存在しない場合、4速変速段あるいは5速変速段からエンジン始動時の変速段を選択する。言い換えると、ECU20は、第一の変速段である1速変速段から3速変速段ではエンジン11の始動時にエンジン回転数Neが車速および第一の変速段の変速比に基づく回転数まで低下しないと予測される場合、自動変速機13の変速段を第二の変速段である4速変速段または5速変速段とする。所定制御可能な変速段が存在するか否かは、車速に応じて決まる。低速走行時は、高速走行時よりもn速同期回転数が低回転となり、エンジン11の始動後にエンジン回転数Neが同期回転数未満まで低下しにくくなる。所定制御可能な変速段が存在する車速域の下限の車速を「所定制御可能な限界車速」と記載する。所定制御可能な限界車速未満の車速では、アイドル回転において定常的にワンウェイクラッチ5が同期する。
【0096】
ECU20は、所定制御可能な限界車速よりも現在の車速が低速である場合、自動変速機13をハイギヤに変速する。例えば、エンジン始動時の変速段として4速変速段を選択した場合、ECU20は、現在の車速が所定制御可能な限界車速未満となると、4速変速段に変速し、入力クラッチ3を係合してエンジン11を始動する。これにより、図7を参照して説明するように、ショックの発生が抑制される。
【0097】
図7において、符号Ne3およびNt3は、本実施形態においてハイギヤでエンジン11を再始動するときのエンジン回転数および入力軸回転数をそれぞれ示す。また、符号Tout2は、1速変速段でエンジン11を再始動するときのアウトプットトルク、Tout3は、本実施形態においてハイギヤでエンジン11を再始動したときのアウトプットトルクをそれぞれ示す。
【0098】
1速変速段でエンジン11を再始動すると、時刻t32において1速同期回転数でワンウェイクラッチ5が同期することで、アウトプットトルクTout2が大きく上昇する。これに対して、ハイギヤ、例えば4速変速段でエンジン11を再始動すると、エンジン回転数Ne3が上昇を始めるときにアウトプットトルクTout3が立ち上がる。これにより、アウトプットトルクTout3の上昇速度は、1速変速段でエンジン11を再始動する場合のアウトプットトルクTout2の上昇速度よりも緩やかとなる。また、アウトプットトルクTout3のピークトルクの大きさは、アウトプットトルクTout2のピークトルクの大きさよりも小さくなる。なお、時刻t31は、エンジン回転数Ne3がハイギヤの同期回転数に到達する時刻を示す。
【0099】
このように、本実施形態のエンジン始動制御によれば、所定制御が実行できない場合にハイギヤでエンジン11を再始動することにより、エンジン再始動時のショックを抑制することが可能となる。
【0100】
なお、所定制御可能な限界車速は、補機35の負荷を低減させる制御を考慮して定められたものであってもよい。例えば、所定制御可能な限界車速は、補機35の負荷を選択可能な最小の負荷まで低減させた状態における所定制御可能な変速段が存在する車速域の下限の車速とすることができる。
【0101】
上記の各実施形態に開示された内容は、適宜組み合わせて実行することができる。
【産業上の利用可能性】
【0102】
以上のように、本発明に係る車両制御装置は、停止していたエンジンを始動するときのショックの抑制と応答性の向上とを両立するのに適している。
【符号の説明】
【0103】
1−1 車両制御装置
1 車両
2 入力軸
3 入力クラッチ
4 出力軸
5 ワンウェイクラッチ
11 エンジン
13 自動変速機
16 駆動輪
20 ECU
35 補機
【技術分野】
【0001】
本発明は、車両制御装置に関する。
【背景技術】
【0002】
従来、エンジン再始動時のショックを抑制する技術が提案されている。特許文献1には、アイドルストップからのエンジン再始動時のように、自動変速機への入力回転速度が出力回転速度よりも小さい空転状態からのエンジン加速時には、入力回転速度が出力回転速度を越えないように、モータジェネレータを回転数制御する車両の制御装置の技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−235107号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
エンジン再始動時のショックを抑制することについて、なお検討の余地がある。例えば、モータジェネレータを備えない車両において、停止していたエンジンを始動するときのショックを抑制できることが望まれている。また、例えば、停止していたエンジンを車両の走行中に始動するときのショックを抑制できることが望まれている。
【0005】
また、停止していたエンジンを始動するときの応答性を向上できることが望まれている。例えば、加速要求に応じてエンジンを再始動する場合、速やかに駆動力を出力できることが望まれている。
【0006】
本発明の目的は、停止していたエンジンを始動するときのショックの抑制と応答性の向上とを両立できる車両制御装置を提供することである。
【課題を解決するための手段】
【0007】
本発明の車両制御装置は、エンジンと、変速機と、前記変速機を介した前記エンジンと車両の駆動輪との動力の伝達を接続あるいは遮断するクラッチと、前記エンジンから前記駆動輪に対する動力の伝達を許容し、かつ前記駆動輪から前記エンジンに対する動力の伝達を遮断するワンウェイクラッチと、を備え、停止していた前記エンジンを前記車両の走行中に始動するときに、前記車両の車速と前記変速機の変速比とに基づいて前記クラッチの係合タイミングを変化させる所定制御を行うことを特徴とする。
【0008】
上記車両制御装置において、前記クラッチを係合した状態で前記エンジンを始動するとエンジン回転数の上昇中に前記ワンウェイクラッチによる動力の伝達が開始されると予測される場合、前記所定制御において、前記エンジンの始動時にエンジン回転数の上昇が終了するまで前記クラッチの係合タイミングを遅延させることが好ましい。
【0009】
上記車両制御装置において、前記クラッチを係合した状態で前記エンジンを始動するとエンジン回転数の上昇中に前記ワンウェイクラッチによる動力の伝達が開始されると予測される場合、前記所定制御において、前記エンジンの始動時にエンジン回転数が前記車速および前記変速比に基づく回転数に低下するまで前記クラッチの係合タイミングを遅延させることが好ましい。
【0010】
上記車両制御装置において、前記所定制御において、エンジン回転数を前記車速および前記変速比に基づく回転数以下の回転数とするように、前記エンジンによって駆動される補機の負荷を低減させることが好ましい。
【0011】
上記車両制御装置において、前記変速機として、前記ワンウェイクラッチによる動力の伝達がなされる第一の変速段と、前記ワンウェイクラッチによる動力の伝達がなされない第二の変速段とを有する有段変速機を備え、前記第一の変速段では前記エンジンの始動時にエンジン回転数が前記車速および前記第一の変速段の変速比に基づく回転数まで低下しないと予測される場合、前記有段変速機の変速段を前記第二の変速段とし、前記クラッチを係合して前記エンジンを始動することが好ましい。
【0012】
上記車両制御装置において、前記車両に対して加速が要求されている場合、前記クラッチの係合タイミングを遅延させることなく、前記クラッチを係合した状態で前記エンジンを始動することが好ましい。
【発明の効果】
【0013】
本発明に係る車両制御装置は、変速機を介したエンジンと車両の駆動輪との動力の伝達を接続あるいは遮断するクラッチと、エンジンから駆動輪に対する動力の伝達を許容し、かつ駆動輪からエンジンに対する動力の伝達を遮断するワンウェイクラッチと、を備え、停止していたエンジンを車両の走行中に始動するときに、車両の車速と変速機の変速比とに基づいてクラッチの係合タイミングを変化させる所定制御を行う。本発明に係る車両制御装置によれば、車速と変速比とに基づいて適宜クラッチの係合タイミングを変化させることにより、停止していたエンジンを始動するときのショックの抑制と応答性の向上とを両立できるという効果を奏する。
【図面の簡単な説明】
【0014】
【図1】図1は、第1実施形態のエンジン停止中の動作を示すフローチャートである。
【図2】図2は、第1実施形態のエンジン始動中の動作を示すフローチャートである。
【図3】図3は、実施形態に係る車両の概略構成を示す図である。
【図4】図4は、所定制御のタイムチャートである。
【図5】図5は、入力クラッチの係合タイミングを遅延させない場合のタイムチャートである。
【図6】図6は、所定制御において補機負荷を低減する場合のタイムチャートである。
【図7】図7は、第3実施形態のエンジン始動制御のタイムチャートである。
【図8】図8は、エンジン始動時のワンウェイクラッチの同期によるショックの発生を説明するタイムチャートである。
【発明を実施するための形態】
【0015】
以下に、本発明の実施形態に係る車両制御装置につき図面を参照しつつ詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記の実施形態における構成要素には、当業者が容易に想定できるものあるいは実質的に同一のものが含まれる。
【0016】
(第1実施形態)
図1から図5を参照して、第1実施形態について説明する。本実施形態は、車両制御装置に関する。図1は、本実施形態のエンジン停止中の動作を示すフローチャート、図2は、本実施形態のエンジン始動中の動作を示すフローチャート、図3は、実施形態に係る車両の概略構成を示す図である。
【0017】
本実施形態の車両制御装置1−1は、走行中にエンジンを停止して燃料の節約を行う自動車において、エンジン再始動時に自動変速機のクラッチ伝達力をコントロールすることによってショック抑制と応答性確保との両立を行う。
【0018】
本実施形態に係る車両は、1stにワンウェイクラッチを持つ自動変速機を搭載している。自動変速機の入力クラッチを係合状態にしたままでエンジンを再始動すると、エンジン回転数のオーバシュートによってワンウェイクラッチが同期して駆動力が一時的に発生することがある。車両制御装置1−1は、このようにエンジン始動時に一時的に駆動力が発生する可能性がある場合、エンジン回転のオーバシュート後に入力クラッチを係合する。これにより、ワンウェイクラッチの同期によるショックの発生を抑制可能となる。
【0019】
また、車両制御装置1−1は、オーバシュートしてもワンウェイクラッチが同期しない場合、もしくはアクセルが踏み込まれ駆動力が必要な場合は、最初から入力クラッチを係合してエンジンを再始動する。これにより、応答性を重視したエンジン始動を実現する。
【0020】
本実施形態は、以下の構成要素を備えることを前提としている。
【0021】
[ハード構成(制御対象部品)]
(1)エンジン×自動変速機(プラネタリAT)。
(2)入力クラッチをエンジン停止始動状態にかかわらず、電動オイルポンプ等の手段を用いて常時コントロール可能な構成。
【0022】
[制御用ECU構成]
エンジン制御ECU×変速機制御ECU、またはパワートレーン制御ECU。
[入力信号]
アクセル開度、車速、エンジン回転数、エンジン制御用センサ各種センサ信号、変速機入力回転、クラッチ前後回転数、エンジントルク。
[処理出力内容]
クラッチ油圧制御、エンジン制御(燃料、バルブ、EGR、スロットル等)。
【0023】
図3に示すように、車両1には、動力源としてのエンジン11が設けられている。エンジン11には、トルクコンバータ12を介して自動変速機13が連結されている。エンジン11の駆動力は、トルクコンバータ12を介して自動変速機13に入力され、デファレンシャルギヤ14及びドライブシャフト15を介して駆動輪16に伝達される。自動変速機13は、A/T油圧制御装置17により車両1の運転状態に応じて変速比が自動的に制御される。自動変速機13は、入力軸2、入力クラッチ3、出力軸4およびワンウェイクラッチ5を有する。入力軸2は、トルクコンバータ12を介してエンジン11の回転が入力される回転軸である。自動変速機13では、入力軸2に入力されるエンジン11の回転が変速されて出力軸4に出力される。出力軸4に出力された回転は、デファレンシャルギヤ14に伝達される。
【0024】
自動変速機13は、複数の変速要素である遊星歯車機構と、クラッチ、ブレーキ等の複数の摩擦係合要素とを組み合わせて構成される有段変速機である。自動変速機13は、各摩擦係合要素を係合あるいは開放することによって変速段を切替えることができる。
【0025】
入力クラッチ3は、入力軸2と出力軸4との間に設けられ、入力軸2と出力軸4との動力の伝達を接続あるいは遮断するクラッチである。すなわち、入力クラッチ3は、エンジン11と駆動輪16との動力伝達経路に配置されたものである。入力クラッチ3は、入力軸2に接続された入力側係合部材3aと、出力軸4側に接続された出力側係合部材3bとを有する。出力側係合部材3bは、複数のクラッチあるいはブレーキ、および遊星歯車機構を介して出力軸4に接続されている。これら複数のクラッチあるいはブレーキをそれぞれ係合あるいは開放することによって、自動変速機13において互いに変速比が異なる複数の変速段を選択的に形成することができる。
【0026】
入力クラッチ3は、自動変速機13において動力の伝達がなされる場合に係合され、動力の伝達がなされない場合に開放される。つまり、自動変速機13においていずれかの変速段が形成されているときに入力クラッチ3が係合されることで、自動変速機13において動力の伝達を行うことができ、入力クラッチ3が開放されていると、動力の伝達が遮断される。つまり、入力クラッチ3は、自動変速機13を介したエンジン11と駆動輪16との動力の伝達を接続あるいは遮断することができるクラッチである。本明細書では、入力クラッチ3を「C1」とも称する。
【0027】
入力クラッチ3は、A/T油圧制御装置17によって供給される係合圧によって制御される。A/T油圧制御装置17は、エンジン11の回転によって駆動されてオイルを吐出するエンジンポンプと、供給される電力によって駆動されてオイルを吐出する電動ポンプとを有する。A/T油圧制御装置17は、エンジン11の運転時には、エンジンポンプから吐出されるオイルを調圧して自動変速機13に供給する。一方、A/T油圧制御装置17は、エコラン制御中は電動ポンプを駆動し、電動ポンプから吐出されるオイルを調圧して自動変速機13に供給する。つまり、入力クラッチ3は、エンジン11を停止して走行しているときにも係合あるいは開放することができる。
【0028】
なお、A/T油圧制御装置17は、車輪の回転と連動して回転する回転部材によって駆動される油圧ポンプを有していてもよい。A/T油圧制御装置17は、例えば、自動変速機13と駆動輪16との間の回転部材によって回転駆動されることでオイルを吐出するポンプを有し、このポンプから吐出されるオイルを調圧して自動変速機13に供給するようにしてもよい。このようにすれば、エンジン11が停止しているときであっても、安定的に自動変速機13に油圧を供給することが可能となる。
【0029】
入力クラッチ3は、A/T油圧制御装置17から供給される係合圧に応じて係合あるいは開放すると共に、係合度合いを制御可能となっている。ここで、係合度合いとは、入力クラッチ3における入力軸2側と出力軸4側との動力の伝達度合いに対応する。すなわち、入力クラッチ3は、入力側係合部材3aと出力側係合部材3bとが係合し、かつ等しい回転数で一体回転する完全係合状態と、入力側係合部材3aと出力側係合部材3bとが係合し、かつ相対回転する半係合状態と、入力側係合部材3aと出力側係合部材3bとが動力を伝達しない開放状態と、に制御可能である。入力クラッチ3は、係合圧に応じて、スリップ量やスリップ率が0の完全係合状態から、スリップ量やスリップ率が最大の開放状態まで任意に制御可能である。
【0030】
ECU20は、入力クラッチ3の前後回転数に基づいて入力クラッチ3の係合状態を制御することができる。入力クラッチ3の前後回転数は、例えば、入力クラッチ3の入力側の回転数および出力側の回転数をそれぞれセンサによって検出するようにしてもよく、入力軸2の回転数および出力軸4の回転数から算出するようにしてもよい。
【0031】
このように、入力クラッチ3は、エンジン11と駆動輪16との動力の伝達を接続あるいは遮断可能である。また、エンジン11と駆動輪16とで動力を伝達するときの入力クラッチ3の係合度合いを制御することで、エンジン11と駆動輪16との動力の伝達度合いを制御可能である。
【0032】
ワンウェイクラッチ5は、エンジン11から駆動輪16に対する動力の伝達を許容し、かつ駆動輪16からエンジン11に対する動力の伝達を遮断するものである。ワンウェイクラッチ5は、例えば、遊星歯車機構の一つのギアの回転を規制することにより、遊星歯車機構における動力の伝達を可能とする。一例として、遊星歯車機構のピニオンギアが入力軸2側に接続され、リングギアが出力軸4側に接続され、サンギアがワンウェイクラッチ5に接続されているとする。この場合に、入力軸2にエンジン11の動力が入力されたときにワンウェイクラッチ5がサンギアの回転を規制することで入力軸2から出力軸4に対する動力の伝達を許容することができる。また、出力軸4から入力軸2に対する動力の伝達に対しては、ワンウェイクラッチ5が空転することで動力の伝達を遮断することができる。このように、ワンウェイクラッチ5が配置された遊星歯車機構では、エンジン11側から駆動輪16側に対する動力の入力に対して、ワンウェイクラッチ5による動力の伝達がなされる。
【0033】
ワンウェイクラッチ5は、例えば、1速変速段を含む低速側の変速段において動力の伝達を行い、かつ高速側の変速段では動力の伝達を行わないものとすることができる。すなわち、低速側の変速段では、ワンウェイクラッチ5が配置された遊星歯車機構においてエンジン11から駆動輪16に対する動力の伝達がなされ、かつ高速側の変速段ではワンウェイクラッチ5が配置された遊星歯車機構においてエンジン11から駆動輪16に対する動力の伝達がなされないように、各クラッチおよびブレーキが制御されるものとしてもよい。本実施形態では、ワンウェイクラッチ5は、動力の伝達経路における入力クラッチ3よりも出力軸4側に配置されている。
【0034】
ブレーキ装置18は、車両1の各車輪に設けられている。運転者は、図示しないブレーキペダルに対する操作により、ブレーキ装置18を作動させ、ブレーキ装置18によって制動力を発生させることができる。また、ブレーキ装置18は、ブレーキ油圧制御装置19によって制御されて、車両1を制動することもできる。
【0035】
車両1には、エンジン11や自動変速機13やブレーキ装置18などを制御する電子制御ユニット(ECU)20が設けられている。ECU20は、エンジン11、自動変速機13(A/T油圧制御装置17)及びブレーキ装置18(ブレーキ油圧制御装置19)の総合的な制御を行う。本実施形態の車両制御装置1−1は、エンジン11と、入力クラッチ3およびワンウェイクラッチ5を含む自動変速機13と、ECU20とを備える。
【0036】
車両1には、アクセルペダルの操作量(アクセル開度)を検出するアクセルポジションセンサ21が設けられている。アクセルポジションセンサ21により検出されたアクセル開度を示す信号は、ECU20に出力される。エンジン11の吸気管22に設けられたスロットルコントロールバルブ23は、スロットルアクチュエータ24により開閉可能とされている。
【0037】
エンジン11には、エンジン回転数(エンジン回転速度)を検出するエンジン回転数センサ28が設けられている。車速センサ29は、車両1の車速を検出する。シフトポジションセンサ30は、運転者が操作するシフトレバーの位置(シフトポジション)を検出する。ブレーキストロークセンサ32は、ブレーキペダルの踏込み量(ペダルストローク)を検出する。入力軸回転数センサ33は、自動変速機13の入力軸2の回転数を検出する。出力軸回転数センサ34は、自動変速機13の出力軸4の回転数を検出する。各センサ28,29,30,32,33,34の検出結果を示す信号は、ECU20に出力される。
【0038】
ECU20は、変速マップを有しており、スロットル開度、車速などに基づいて、自動変速機13の変速段を決定し、この決定された変速段を成立させるようにA/T油圧制御装置17を制御することができる。
【0039】
エンジン11には、スタータ31が設けられている。スタータ31は、エンジン11を始動する始動装置である。スタータ31は、エンジン始動時にエンジン11の回転軸に対して動力を伝達可能に接続される。スタータ31は、例えば、DCモータを有し、バッテリからの電力を消費して動力を出力し、この動力によってエンジン11を回転させることができる。スタータ31は、ECU20に接続されており、ECU20によって制御される。
【0040】
エンジン11は、エンジン11によって駆動される補機35を備える。補機35は、エンジン11の回転軸と動力を伝達可能に設けられており、エンジン11から伝達される動力により作動する。補機35は、例えば、オルタネータやエアコンのコンプレッサを含む。補機35は、ECU20に接続されており、ECU20によって制御される。
【0041】
ECU20は、エンジン11に対する燃料の供給を停止して惰性により車両1を走行させるエコラン制御を実行可能である。エコラン制御は、例えば、車両1の走行中にアクセルオフされた場合に実行されるものである。エコラン制御中は、燃料が消費されないため、エコラン制御を実行することで燃費の向上を図ることができる。なお、エコラン制御は、走行中に限らず、車両1の停車中に実行されてもよい。
【0042】
ECU20は、例えば、アクセルポジションセンサ21の検出結果に基づき、アクセルオフと判定するとエコラン制御を実行する。エコラン制御を実行する場合、ECU20は、エンジン11に対する燃料の供給を停止してエンジン11の運転を停止する。ここで、エンジン11の運転とは、エンジン11に対して燃料が供給されて、エンジン11が自立的に回転する作動状態を示す。エンジン11の運転が停止されると、エンジン11は被駆動状態あるいは回転が停止した動作停止状態となる。燃料の供給が停止されたエンジン11は、駆動輪16との間で動力が伝達される状態であれば駆動輪16の回転によって駆動される被駆動状態となり、駆動輪16との間で動力が伝達されない状態であれば、回転を停止する。
【0043】
ECU20は、エコラン制御時において、入力クラッチ3を開放し、エンジン11の回転を停止させて車両1を走行させることができる。このようにエコラン制御時に入力クラッチ3を開放すると、車両1は、自動変速機13を介したエンジン11と駆動輪16との動力の伝達経路が遮断され、エンジンブレーキが作用しないフリーラン状態となる。フリーラン状態では、走行抵抗が小さくなり、燃費の向上が可能となる。
【0044】
エコラン制御の実行中に、エコラン制御から復帰する復帰条件が成立すると、ECU20は、エンジン11を再始動させる。ECU20は、例えば、アクセルが踏み込まれた場合など、エンジン11に対する再始動要求、あるいは車両1に対する加速要求の少なくともいずれか一方の要求があった場合に、車両1をエコラン制御から復帰させる。また、ECU20は、車両1の状態に基づいてエコラン制御から復帰させてもよい。ECU20は、例えば、バッテリの充電量が低下したときに車両1をエコラン制御から復帰させるようにしてもよい。
【0045】
車両1をエコラン制御から復帰させる場合、ECU20は、走行中に入力クラッチ3を係合状態とし、スタータ31によって停止していたエンジン11を始動する。入力クラッチ3を係合状態としてエンジン11を始動することで、エンジン11の始動後に入力クラッチ3を係合する場合よりも応答性を向上させることができる。例えば、運転者による加速要求がなされているときに、エンジン始動後に即座に駆動力を発生させることができ、加速要求に対する応答性を向上させることができる。
【0046】
ここで、入力クラッチ3を係合した状態でエンジン11を始動する場合、エンジン回転のオーバシュートによってワンウェイクラッチ5が同期し、駆動力が一時的に発生することがある。図8は、エンジン始動時のワンウェイクラッチ5の同期によるショックの発生を説明するタイムチャートである。
【0047】
図8において、符号Neはエンジン回転数、Ntは自動変速機13の入力軸2の回転数、Toutは出力軸4に対して出力されるアウトプットトルクを示す。本実施形態では、入力軸2の回転数を単に「入力軸回転数Nt」とも記載する。図8には、自動変速機13の変速段が1速変速段である場合の各回転数およびアウトプットトルクが示されている。
【0048】
1速変速段では、エンジン11の運転が停止されてエンジン11が動力を出力していないと、ワンウェイクラッチ5が空転する。これにより、エンジン11の再始動が開始される時刻t1よりも前はエンジン回転数Neおよび入力軸回転数Nt共に0である。時刻t1にスタータ31によってエンジン11の始動が開始されると、エンジン回転数Neおよび入力軸回転数Ntが共に上昇する。ここで、入力軸回転数Ntが、1速変速段における同期回転数に到達すると、ワンウェイクラッチ5が同期することによって、入力軸回転数Ntの更なる上昇が規制される。
【0049】
本実施形態では、n速変速段(n=1,2,3…)における同期回転数を単に「n速同期回転数」と記載する。例えば、1速同期回転数は、自動変速機13の変速段を1速変速段としている場合に、ワンウェイクラッチ5が配置された遊星歯車機構において、入力軸2側の回転数が出力軸4側の回転数と同期する入力軸回転数Ntである。入力軸回転数Ntが1速同期回転数まで上昇すると、ワンウェイクラッチ5が同期して入力軸2から出力軸4に対する動力の伝達がなされ、入力軸回転数Ntの更なる上昇が規制される。
【0050】
従って、時刻t2に入力軸回転数Ntが1速同期回転数に到達すると、その後は入力軸回転数Ntが1速同期回転数に沿って推移する。一方、エンジン回転数Neは、時刻t2以降も上昇を続ける。これにより、アウトプットトルクToutが大きく上昇してショックが生じてしまう。エンジン始動時におけるショックの発生を抑制できることが望ましい。ここで、n速同期回転数は、車速および変速比に応じて変化するものである。ECU20は、自動変速機13の油温、内部回転(イナーシャトルク)等に基づいてn速同期回転数を予測することができる。例えば、ECU20は、自動変速機13の油温やイナーシャトルクとn速同期回転数との対応関係を示すマップを予め記憶しており、このマップを参照してn速同期回転数を算出することができる。
【0051】
本実施形態の車両制御装置1−1は、停止していたエンジン11を走行中に始動するときに、車両1の車速と自動変速機13の変速比とに基づいて入力クラッチ3の係合タイミングを変化させる所定制御を行う。この所定制御は、エンジン再始動時のショックの抑制と応答性の向上とを両立できるように入力クラッチ3の係合タイミングを変化させるものである。エンジン再始動時における入力クラッチ3の係合タイミングを早めれば、加速要求に対する応答性を向上させることができる。一方、状況に応じて、車速および変速比に基づいてエンジン再始動時における入力クラッチ3の係合タイミングを遅延させることでショックの発生を抑制することができる場合がある。
【0052】
ECU20は、入力クラッチ3を係合した状態でエンジン11を始動するとエンジン回転数Neの上昇中にワンウェイクラッチ5による動力の伝達が開始されると予測される場合、所定制御において入力クラッチ3の係合タイミングを遅延させる。具体的には、エンジン11の始動時にエンジン回転数Neの上昇が終了するまで入力クラッチ3の係合タイミングを遅延させる。一例として、ECU20は、エンジン回転数Neが低下し始めるまで入力クラッチ3の係合タイミングを遅延させる。
【0053】
より好ましくは、ECU20は、エンジン回転数Neが1速同期回転数に対応する回転数に低下するまで入力クラッチ3の係合タイミングを遅延させる。本実施形態では、ECU20は、エンジン回転数Neが1速同期回転数に対応する回転数まで低下したとき(時刻t3)に入力クラッチ3を係合する。この1速同期回転数に対応するエンジン回転数Neは、車速および変速比に基づく回転数に対応している。ECU20は、所定制御により、エンジン始動時のアウトプットトルクToutの発生を抑制し、ドライバビリティを向上させることができる。
【0054】
図1、図2および図4を参照して、本実施形態の車両制御装置1−1による制御について説明する。図4は、本実施形態の車両制御装置1−1による所定制御のタイムチャートである。図1に示す制御フローは、エコラン制御中に実行されるものであり、例えば、所定の間隔で繰り返し実行される。
【0055】
まず、ステップS1では、ECU20により、エンジン停止中であるか否かが判定される。ECU20は、例えば、エンジン回転数センサ28の検出結果に基づいてステップS1の判定を行う。その判定の結果、エンジン停止中であると判定された場合(ステップS1−Y)にはステップS2に進み、そうでない場合(ステップS1−N)にはステップS6に進む。
【0056】
ステップS2では、ECU20により、車速が所定値未満であるか否かが判定される。ある程度以上に車速が高い場合、n速同期回転数が高回転となり、エンジン11の始動時のオーバシュートによってもワンウェイクラッチ5の同期が生じないと判定することができる。ステップS2における判定のための所定値は、例えば、エンジン11の始動時における入力軸回転数Ntが到達し得る最大の回転数に基づいて定めることができる。ステップS2の判定の結果、車速が所定値未満であると判定された場合(ステップS2−Y)にはステップS3に進み、そうでない場合(ステップS2−N)にはステップS6に進む。
【0057】
ステップS3では、ECU20により、エンジン再始動予想ピーク回転が読み出され、予測値N1に代入される。ECU20は、エンジン再始動時の条件に応じた予想ピーク回転数を予めマップ等として記憶している。エンジン11の再始動時におけるピーク回転数は、エンジン油温や冷却水温、外気温等の条件によって変化する。ECU20は、ピーク回転数に影響する条件を取得し、取得した条件に基づいて読み出した予想ピーク回転数を予測値N1とする。ステップS3が実行されると、ステップS4に進む。なお、ECU20は、予測値N1と、実際のエンジン回転数Neの履歴とに基づいて予測値N1のマップを補正するようにしてもよい。また、ECU20は、n速同期回転数のマップを補正するようにしてもよい。例えば、入力クラッチ3を係合したときの入力軸回転数Ntやエンジン回転数Neの推移に基づいてn速同期回転数のマップを補正することが可能である。
【0058】
ステップS4では、ECU20により、予測値N1が変速比(ギヤ比)に基づく入力軸回転数Ntよりも大であるか否かを判定する。本実施形態では、エンジン11の再始動時に1速変速段を選択する場合について説明する。ECU20は、車速と1速変速段の変速比との積で決まる入力軸回転数Ntである1速同期回転数と、ステップS3で算出した予測値N1との比較結果に基づいてステップS4の判定を行う。なお、車速とは、出力軸4の回転数を示すものである。その判定の結果、予測値N1が1速同期回転数よりも大であると判定された場合(ステップS4−Y)にはステップS5に進み、そうでない場合(ステップS4−N)にはステップS6に進む。
【0059】
ステップS5では、ECU20により、入力クラッチ3が開放される。ECU20は、エンジン11の再始動前に入力クラッチ3を開放し、ワンウェイクラッチ5の同期によるショックの発生を未然に抑制する。ステップS5が実行されると、本制御フローは終了する。
【0060】
ステップS6では、ECU20により、入力クラッチ3が係合される。ECU20は、入力クラッチ3を係合しておくことで、エンジン11の再始動時の応答性の向上を図る。
【0061】
図2に示す制御フローは、エンジン11の再始動判定がなされた場合に実行されるものであり、例えば、所定の間隔で繰り返し実行される。
【0062】
まず、ステップS11では、ECU20により、エンジン再始動中であるか否かが判定される。図4では、時刻t11においてエンジン11の再始動が開始される。ステップS11の判定の結果、エンジン再始動中であると判定された場合(ステップS11−Y)にはステップS12に進み、そうでない場合(ステップS11−N)には本制御フローは終了する。
【0063】
ステップS12では、ECU20により、クラッチ開放中であるか否かが判定される。ステップS12では、入力クラッチ3が予め開放されているか否かが判定される。図1に示す制御フローのステップS5で予め入力クラッチ3が開放されている場合、ステップS13以降において入力クラッチ3の係合タイミングを遅延させる所定制御が実行される。ステップS12の判定の結果、クラッチ開放中であると判定された場合(ステップS12−Y)にはステップS13に進み、そうでない場合(ステップS12−N)には本制御フローは終了する。
【0064】
ステップS13では、ECU20により、エンジン再始動予想ピーク回転が読み出され、予測値N1に代入される。ECU20は、現時点におけるエンジン再始動予想ピーク値によって予測値N1を更新する。ステップS13が実行されると、ステップS14に進む。
【0065】
ステップS14では、ECU20により、予測値N1が1速変速段の変速比に基づく入力軸回転数Ntよりも大であるか否かが判定される。ECU20は、ステップS13で更新された予測値N1が、現在車速に基づく1速同期回転数よりも大であるか否かを判定する。その判定の結果、予測値N1が1速変速段の変速比に基づく入力軸回転数Ntよりも大であると判定された場合(ステップS14−Y)にはステップS15に進み、そうでない場合(ステップS14−N)にはステップS18に進む。
【0066】
ステップS15では、ECU20により、エンジン始動ピーク回転が過ぎたか否かが判定される。ECU20は、エンジン回転数センサ28の検出結果に基づいてステップS15の判定を行うことができる。図4では、時刻t13においてエンジン回転数Neがピークとなり、その後にステップS15において肯定判定がなされるようになる。ステップS15の判定の結果、エンジン始動ピーク回転数が過ぎたと判定された場合(ステップS15−Y)にはステップS16に進み、そうでない場合(ステップS15−N)には本制御フローは終了する。
【0067】
ステップS16では、ECU20により、エンジン回転数Neが車速および1速変速段の変速比に基づく入力軸回転数Ntよりも小であるか否かが判定される。ステップS16では、エンジン回転数Neが1速同期回転数未満に低下したか否かが判定される。入力軸回転数Ntはエンジン回転数Ne以下の回転数となるものであるため、エンジン回転数Neが1速同期回転数未満であれば、入力軸回転数Ntも1速同期回転数未満の状態である。ステップS16の判定の結果、エンジン回転数Neが1速変速段の変速比に基づく入力軸回転数Ntよりも小であると判定された場合(ステップS16−Y)にはステップS18に進み、そうでない場合(ステップS16−N)にはステップS17に進む。なお、ステップS16の判定では、エンジン回転数Neに代えて、入力軸回転数Ntと1速同期回転数との比較を行うようにしてもよい。
【0068】
ステップS17では、ECU20により、エンジン回転数Neの低下勾配に基づく判定がなされる。ECU20は、低下勾配から入力軸回転数Ntがワンウェイクラッチ5の同期回転数を下回る時間を予測して、係合開始指令を出力するか否かを判定する。具体的には、ECU20は、下記式(1)が成立する場合、クラッチ係合開始の指令を出力する。
(Ne−(車速×1stギヤ))/ΔNe < 所定値…(1)
【0069】
上記式(1)の左辺において、ΔNeは、エンジン回転数Neの変化速度であり、例えば、単位時間あたりのエンジン回転数Neの低下量の大きさを示す。つまり、上記式(1)の左辺は、エンジン回転数Neが1速同期回転数に低下するまでの所要時間を示す。また、上記式(1)の右辺の所定値は、入力クラッチ3に対する係合開始指令が出力されてから実際に入力クラッチ3が係合するまでの所要時間に基づいて定められている。本実施形態では、ECU20は、エンジン回転数Neが1速同期回転数に一致するタイミングと、入力クラッチ3が係合するタイミングとが同期するように、入力クラッチ3に対する係合指令を出力する。ステップS17の判定の結果、上記式(1)が成立すると判定された場合(ステップS17−Y)にはステップS18に進み、そうでない場合(ステップS17−N)には本制御フローは終了する。
【0070】
ステップS18では、ECU20により、クラッチ係合開始指令が出力される。ECU20は、入力クラッチ3に対して、係合開始指令を出力する。A/T油圧制御装置17は、入力クラッチ3を係合させるべく入力クラッチ3に対して油圧を供給する。図4では、エンジン回転数Neが1速同期回転数のラインとクロスする時刻t14において入力クラッチ3(C1)が係合される。ECU20は、例えば、ワンウェイクラッチ5の同期によるショックの発生を抑制できるように、半係合状態を経て完全係合するように入力クラッチ3を係合させる。ステップS18が実行されると、本制御フローは終了する。
【0071】
以上説明したように、本実施形態の車両制御装置1−1によれば、エコラン制御中にエンジン11を再始動する時に、入力クラッチ3を係合した状態でエンジン11を始動するとエンジン回転数Neの上昇中にワンウェイクラッチ5による動力の伝達が開始されると予測される場合、所定制御において、入力クラッチ3の係合タイミングが遅延される。これにより、エンジン11の再始動時のショックの発生が抑制され、ドライバビリティの向上を図ることができる。
【0072】
なお、ステップS17において、エンジン回転数Neが1速同期回転数に低下するまでの所要時間が大きすぎる場合や、エンジン回転数Neが1速同期回転数まで低下しないと予測された場合にもステップS18に進んで入力クラッチ3を係合させるようにしてもよい。例えば、エンジン始動中に車速が低下した場合など、予測に反してエンジン回転数Neが1速同期回転数まで低下しなくなる可能性もある。こうした場合には、所定制御を終了して入力クラッチ3を係合することができる。
【0073】
また、車両制御装置1−1は、入力クラッチ3を係合した状態でエンジン11を始動してもエンジン回転数Neの上昇中にワンウェイクラッチ5による動力の伝達が開始されると予測されない場合は、入力クラッチ3を係合した状態でエンジン11を再始動する。図5は、本実施形態において入力クラッチ3の係合タイミングを遅延させない場合のタイムチャート、言い換えると、エンジン回転数Neの上昇中にワンウェイクラッチ5による動力の伝達が開始されると予測されない場合のタイムチャートである。
【0074】
予測値N1が1速同期回転数以下である場合(S4−N)、ECU20は入力クラッチ3を係合させた状態でエンジン11を再始動する。言い換えると、エンジン11の再始動時にエンジン回転数Neがアイドル回転数に対してオーバシュートしてもワンウェイクラッチ5が同期しないと予測できた場合、入力クラッチ3を係合した状態でエンジン11を始動する。この場合、エンジン11の始動完了時に入力クラッチ3が既に係合しているため、加速要求がなされた場合に高応答で駆動力を出力することができる。また、入力軸回転数Ntが1速同期回転数を超えてしまう可能性は小さく、ワンウェイクラッチ5の同期によるショックの発生が抑制される。
【0075】
また、本実施形態では、ECU20は、運転者がアクセルを踏み込み、駆動力が必要な場合は、入力クラッチ3を係合した状態でエンジン11を再始動する。車両1に対して加速が要求されている場合、エンジン回転数の上昇中にワンウェイクラッチ5による動力の伝達が開始されるか否かにかかわらず、入力クラッチ3の係合タイミングを遅延させることなく、入力クラッチ3を係合した状態でエンジン11を始動する。
【0076】
ECU20は、例えば、スタータ31によってエンジン11の始動を開始するときに入力クラッチ3を係合状態とする。これにより、運転者のアクセルONの操作に対する車両1の加速応答性を向上させることができる。なお、ECU20は、運転者によってアクセルが踏み込まれている場合、要求トルクや要求加速度に基づいて所定制御において入力クラッチ3の係合タイミングを遅延させるか否かを決定するようにしてもよい。例えば、アクセル開度および車速に基づく要求トルクが所定トルク以上である場合に、入力クラッチ3の係合タイミングを遅延させることを禁止して入力クラッチ3を係合した状態でエンジン11を再始動するようにしてもよい。
【0077】
なお、本実施形態では、自動変速機13を介したエンジン11と駆動輪16との動力の伝達を接続あるいは遮断するクラッチが、自動変速機13の入力クラッチ3であったが、これには限定されない。エンジン11と駆動輪16との動力の伝達を接続あるいは遮断するクラッチは、入力クラッチ3以外の自動変速機13のクラッチであってもよく、自動変速機13の外部に設けられたクラッチであってもよい。例えば、トルクコンバータ12の出力軸と自動変速機13の入力軸2との間にクラッチを介在させてもよく、自動変速機13の出力軸4よりも駆動輪16側にクラッチが配置されてもよい。
【0078】
本実施形態のワンウェイクラッチ5は、自動変速機13の内部に設けられているが、ワンウェイクラッチ5の位置はこれには限定されない。ワンウェイクラッチ5は、例えば、自動変速機13よりもエンジン11側に配置されていてもよく、あるいは自動変速機13よりも駆動輪16側に配置されていてもよい。つまり、ワンウェイクラッチ5は、自動変速機13を介したエンジン11と駆動輪16との動力の伝達経路に配置され、エンジン11から駆動輪16に対する動力の伝達を許容し、かつ駆動輪16からエンジン11に対する動力の伝達を遮断するものであればよい。
【0079】
(第1実施形態の変形例)
第1実施形態の変形例について説明する。上記第1実施形態では、エンジン回転数Neのオーバシュート後に、エンジン回転数Neがn速同期回転数まで低下したタイミングで入力クラッチ3を係合したが、入力クラッチ3を係合するタイミングは、これには限定されない。ショックの発生を抑制する観点からは、エンジン回転数がn速同期回転数に等しくなるタイミングと入力クラッチ3の係合タイミングとを一致させることが望ましいが、入力クラッチ3の係合タイミングは、その前後のタイミングとされてもよい。
【0080】
例えば、入力クラッチ3の係合タイミングは、運転者の駆動要求に関連するパラメータに基づいて可変とされてもよい。駆動要求に関連するパラメータは、例えば、アクセル開度、アクセル開度の変化速度、要求トルクや要求駆動力等である。運転者の加速要求が大きい場合、加速要求が小さい場合よりも入力クラッチ3の係合タイミングを早めるようにすることができる。例えば、加速要求が大きいほど、エンジン回転数がn速同期回転数に等しくなるタイミングに対して入力クラッチ3の係合タイミングを早めるようにすればよい。このようにすれば、ショックの抑制と応答性の向上とに加速要求に応じた重み付けを行うことができる。
【0081】
なお、入力クラッチ3の係合タイミングは、運転者の操作によるものに限らず、駆動要求に関連するパラメータに基づいて可変とされてもよい。例えば、入力クラッチ3の係合タイミングは、車両1の走行制御に基づく加速要求に応じて早められてもよい。また、入力クラッチ3の係合タイミングは、運転者の走行指向に応じて可変とされてもよい。例えば、加減速時に加速度の大きな変化を要求する運転者の場合、加速度の大きな変化を要求しない運転者の場合よりも入力クラッチ3の係合タイミングを早めるようにしてもよい。
【0082】
(第2実施形態)
図6を参照して、第2実施形態について説明する。第2実施形態については、上記実施形態で説明したものと同様の機能を有する構成要素には同一の符号を付して重複する説明は省略する。本実施形態において、上記第1実施形態と異なる点は、定常的にワンウェイクラッチ5が同期するエンジン回転数Neの場合は、入力クラッチ3の係合までエンジン回転数Neを同期回転に対し若干下回る回転数に低下させるように制御する点である。このために、本実施形態の所定制御では、エンジン11の再始動時に入力クラッチ3を係合するまで補機35を一瞬切ることで、エンジン回転数Neを低減させる。つまり、本実施形態では、車両制御装置1−1は、エンジン始動後にエンジン回転数Neがn速同期回転数まで低下しないと予測される場合、補機35の負荷を低減させる。
【0083】
図6は、所定制御において補機負荷を低減する場合のタイムチャートである。なお、本実施形態の制御は、上記第1実施形態(図1)のステップS4において、予測値N1が1速変速段の変速比に基づく入力軸回転数Ntよりも大であると判定され(ステップS4−Y)、入力クラッチ3が開放された状態でエンジン11の再始動が開始される場合になされるものである。
【0084】
図6において、符号Ne0、Nt0およびTout0は、それぞれ本実施形態の制御がなされない場合のエンジン回転数、入力軸回転数およびアウトプットトルクを示す。また、符号Ne1、Nt1およびTout1は、それぞれ本実施形態の制御がなされる場合のエンジン回転数、入力軸回転数およびアウトプットトルクを示す。
【0085】
本実施形態では、ECU20は、エンジン11の再始動前あるいはエンジン11の再始動中に、エンジン始動後のエンジン回転数の推移を予測する。エンジン始動後のエンジン回転数は、例えば、車速と、自動変速機13の変速段と、補機35の負荷とに基づいて算出することができる。例えば、1速変速段でエンジン11を再始動する場合を例に説明すると、ECU20は、再始動時にオーバシュートした後のエンジン回転数Ne0が、1速同期回転数以下の回転数まで低下するか否かを予測する。その結果、エンジン回転数Ne0が1速同期回転数を上回る回転数で推移する、すなわち定常的にワンウェイクラッチ5が同期するエンジン回転数となると予測した場合は、補機35の負荷を低減させる。
【0086】
ECU20は、入力クラッチ3が係合するまでエンジン回転数Neを1速同期回転数に対し若干下回る回転数とするように、補機35を一時的にオフとする。ECU20は、例えば、エアコンの電源をオフとすることや、オルタネータの発電量を0とすることによってエンジン11に対する補機35の負荷トルクを低減させる。これにより、エンジン11に対する要求トルクが低減することで、エンジン11の回転数が低下する。図6では、時刻t21において補機35がオフとされ、エンジン回転数Ne1および入力軸回転数Nt1が低下しはじめる。時刻t22以降は、エンジン回転数Ne1が1速同期回転数を下回るようになり、ワンウェイクラッチ5が空転する。
【0087】
ECU20は、ワンウェイクラッチ5の同期が解除される時刻t22以降に入力クラッチ3を係合させる。これにより、入力クラッチ3を係合するときのショックの発生が抑制される。例えば、本実施形態の補機35の負荷を低減させる制御がなされない場合、時刻t22において入力クラッチ3を係合させると、エンジン回転数Ne0と1速同期回転数との回転数差が大きな状態で入力クラッチ3を係合することとなる。これにより、アウトプットトルクTout0の変動が大きなものとなり、ショックの発生によりドライバビリティの低下を招くことがある。
【0088】
これに対して、本実施形態では、エンジン回転数Ne1が1速同期回転数を下回る時刻t22以降に入力クラッチ3を係合することで、ワンウェイクラッチ5を同期させることなく入力クラッチ3を係合することができる。また、入力クラッチ3の係合後に補機35の負荷を低減前の負荷まで増加させることで、時刻t23においてエンジン回転数Ne1が1速同期回転数を超える。このときは、1速同期回転数とエンジン回転数Ne1との回転数差がない状態でワンウェイクラッチ5が同期することで、アウトプットトルクTout1の急激な変動が生じることはない。
【0089】
このように、本実施形態の補機35の制御によればショックの発生を抑制しつつ入力クラッチ3を係合することができる。なお、補機35の負荷を低減させる制御は、エンジン回転数Ne0が1速同期回転数を上回る回転数で推移することを事前に予測した場合に限らず実行することができる。例えば、エンジン回転数Neがオーバシュート後に1速同期回転数を下回ると予測されたものの、実際のエンジン回転数Neが1速同期回転数を上回って推移したときに、補機35の負荷を低減させる制御が実行されてもよい。
【0090】
本実施形態の補機35の制御は、入力クラッチ3を係合するまでに所定の時間を要する。このため、高応答のニーズがない場合、例えばアクセルオンされていない場合に実行されることが好ましい。
【0091】
(第3実施形態)
図7を参照して、第3実施形態について説明する。第3実施形態については、上記実施形態で説明したものと同様の機能を有する構成要素には同一の符号を付して重複する説明は省略する。図7は、本実施形態のエンジン始動制御のタイムチャートである。本実施形態において、上記各実施形態と異なる点は、ワンウェイクラッチ5を同期させないために必要な回転数域まで一時的であってもエンジン回転数Neを低下させられない場合、ハイギヤを出力することによってショックの発生を抑制する点である。
【0092】
ECU20は、エンジン始動後にエンジン回転数Neが同期回転数まで低下しないと予測される場合、ハイギヤを出力する。このハイギヤは、ワンウェイクラッチ5による動力の伝達がなされない変速段である。すなわち、本実施形態では、ワンウェイクラッチ5による動力の伝達がなされる変速段ではワンウェイクラッチ5の同期によるショックの発生が避けられない場合、ワンウェイクラッチ5による動力の伝達が生じない変速段でエンジン11を始動する。
【0093】
本実施形態では、自動変速機13が5速変速可能なものであって、かつ1速変速段から3速変速段ではワンウェイクラッチ5による動力の伝達がなされ、4速変速段および5速変速段ではワンウェイクラッチ5による動力の伝達がなされないものである場合について説明する。1速変速段から3速変速段は、ワンウェイクラッチ5による動力の伝達がなされる第一の変速段に対応し、4速変速段および5速変速段は、ワンウェイクラッチ5による動力の伝達がなされない第二の変速段に対応する。
【0094】
ECU20は、エンジン11を停止して走行中に、1速変速段から3速変速段のうち、エンジン11の始動後にエンジン回転数Neが同期回転数未満に低下すると予測される変速段が存在するか否かを判定する。本実施形態では、エンジン11の始動後にエンジン回転数Neが同期回転数未満に低下すると予測される変速段を単に「所定制御可能な変速段」と記載する。ECU20は、判定の結果、所定制御可能な変速段が存在する場合、上記各実施形態の所定制御を実行する。
【0095】
一方、ECU20は、所定制御可能な変速段が存在しない場合、4速変速段あるいは5速変速段からエンジン始動時の変速段を選択する。言い換えると、ECU20は、第一の変速段である1速変速段から3速変速段ではエンジン11の始動時にエンジン回転数Neが車速および第一の変速段の変速比に基づく回転数まで低下しないと予測される場合、自動変速機13の変速段を第二の変速段である4速変速段または5速変速段とする。所定制御可能な変速段が存在するか否かは、車速に応じて決まる。低速走行時は、高速走行時よりもn速同期回転数が低回転となり、エンジン11の始動後にエンジン回転数Neが同期回転数未満まで低下しにくくなる。所定制御可能な変速段が存在する車速域の下限の車速を「所定制御可能な限界車速」と記載する。所定制御可能な限界車速未満の車速では、アイドル回転において定常的にワンウェイクラッチ5が同期する。
【0096】
ECU20は、所定制御可能な限界車速よりも現在の車速が低速である場合、自動変速機13をハイギヤに変速する。例えば、エンジン始動時の変速段として4速変速段を選択した場合、ECU20は、現在の車速が所定制御可能な限界車速未満となると、4速変速段に変速し、入力クラッチ3を係合してエンジン11を始動する。これにより、図7を参照して説明するように、ショックの発生が抑制される。
【0097】
図7において、符号Ne3およびNt3は、本実施形態においてハイギヤでエンジン11を再始動するときのエンジン回転数および入力軸回転数をそれぞれ示す。また、符号Tout2は、1速変速段でエンジン11を再始動するときのアウトプットトルク、Tout3は、本実施形態においてハイギヤでエンジン11を再始動したときのアウトプットトルクをそれぞれ示す。
【0098】
1速変速段でエンジン11を再始動すると、時刻t32において1速同期回転数でワンウェイクラッチ5が同期することで、アウトプットトルクTout2が大きく上昇する。これに対して、ハイギヤ、例えば4速変速段でエンジン11を再始動すると、エンジン回転数Ne3が上昇を始めるときにアウトプットトルクTout3が立ち上がる。これにより、アウトプットトルクTout3の上昇速度は、1速変速段でエンジン11を再始動する場合のアウトプットトルクTout2の上昇速度よりも緩やかとなる。また、アウトプットトルクTout3のピークトルクの大きさは、アウトプットトルクTout2のピークトルクの大きさよりも小さくなる。なお、時刻t31は、エンジン回転数Ne3がハイギヤの同期回転数に到達する時刻を示す。
【0099】
このように、本実施形態のエンジン始動制御によれば、所定制御が実行できない場合にハイギヤでエンジン11を再始動することにより、エンジン再始動時のショックを抑制することが可能となる。
【0100】
なお、所定制御可能な限界車速は、補機35の負荷を低減させる制御を考慮して定められたものであってもよい。例えば、所定制御可能な限界車速は、補機35の負荷を選択可能な最小の負荷まで低減させた状態における所定制御可能な変速段が存在する車速域の下限の車速とすることができる。
【0101】
上記の各実施形態に開示された内容は、適宜組み合わせて実行することができる。
【産業上の利用可能性】
【0102】
以上のように、本発明に係る車両制御装置は、停止していたエンジンを始動するときのショックの抑制と応答性の向上とを両立するのに適している。
【符号の説明】
【0103】
1−1 車両制御装置
1 車両
2 入力軸
3 入力クラッチ
4 出力軸
5 ワンウェイクラッチ
11 エンジン
13 自動変速機
16 駆動輪
20 ECU
35 補機
【特許請求の範囲】
【請求項1】
エンジンと、
変速機と、
前記変速機を介した前記エンジンと車両の駆動輪との動力の伝達を接続あるいは遮断するクラッチと、
前記エンジンから前記駆動輪に対する動力の伝達を許容し、かつ前記駆動輪から前記エンジンに対する動力の伝達を遮断するワンウェイクラッチと、
を備え、
停止していた前記エンジンを前記車両の走行中に始動するときに、前記車両の車速と前記変速機の変速比とに基づいて前記クラッチの係合タイミングを変化させる所定制御を行う
ことを特徴とする車両制御装置。
【請求項2】
前記クラッチを係合した状態で前記エンジンを始動するとエンジン回転数の上昇中に前記ワンウェイクラッチによる動力の伝達が開始されると予測される場合、前記所定制御において、前記エンジンの始動時にエンジン回転数の上昇が終了するまで前記クラッチの係合タイミングを遅延させる
請求項1に記載の車両制御装置。
【請求項3】
前記クラッチを係合した状態で前記エンジンを始動するとエンジン回転数の上昇中に前記ワンウェイクラッチによる動力の伝達が開始されると予測される場合、前記所定制御において、前記エンジンの始動時にエンジン回転数が前記車速および前記変速比に基づく回転数に低下するまで前記クラッチの係合タイミングを遅延させる
請求項1に記載の車両制御装置。
【請求項4】
前記所定制御において、エンジン回転数を前記車速および前記変速比に基づく回転数以下の回転数とするように、前記エンジンによって駆動される補機の負荷を低減させる
請求項3に記載の車両制御装置。
【請求項5】
前記変速機として、前記ワンウェイクラッチによる動力の伝達がなされる第一の変速段と、前記ワンウェイクラッチによる動力の伝達がなされない第二の変速段とを有する有段変速機を備え、
前記第一の変速段では前記エンジンの始動時にエンジン回転数が前記車速および前記第一の変速段の変速比に基づく回転数まで低下しないと予測される場合、前記有段変速機の変速段を前記第二の変速段とし、前記クラッチを係合して前記エンジンを始動する
請求項3または4に記載の車両制御装置。
【請求項6】
前記車両に対して加速が要求されている場合、前記クラッチの係合タイミングを遅延させることなく、前記クラッチを係合した状態で前記エンジンを始動する
請求項2から4のいずれか1項に記載の車両制御装置。
【請求項1】
エンジンと、
変速機と、
前記変速機を介した前記エンジンと車両の駆動輪との動力の伝達を接続あるいは遮断するクラッチと、
前記エンジンから前記駆動輪に対する動力の伝達を許容し、かつ前記駆動輪から前記エンジンに対する動力の伝達を遮断するワンウェイクラッチと、
を備え、
停止していた前記エンジンを前記車両の走行中に始動するときに、前記車両の車速と前記変速機の変速比とに基づいて前記クラッチの係合タイミングを変化させる所定制御を行う
ことを特徴とする車両制御装置。
【請求項2】
前記クラッチを係合した状態で前記エンジンを始動するとエンジン回転数の上昇中に前記ワンウェイクラッチによる動力の伝達が開始されると予測される場合、前記所定制御において、前記エンジンの始動時にエンジン回転数の上昇が終了するまで前記クラッチの係合タイミングを遅延させる
請求項1に記載の車両制御装置。
【請求項3】
前記クラッチを係合した状態で前記エンジンを始動するとエンジン回転数の上昇中に前記ワンウェイクラッチによる動力の伝達が開始されると予測される場合、前記所定制御において、前記エンジンの始動時にエンジン回転数が前記車速および前記変速比に基づく回転数に低下するまで前記クラッチの係合タイミングを遅延させる
請求項1に記載の車両制御装置。
【請求項4】
前記所定制御において、エンジン回転数を前記車速および前記変速比に基づく回転数以下の回転数とするように、前記エンジンによって駆動される補機の負荷を低減させる
請求項3に記載の車両制御装置。
【請求項5】
前記変速機として、前記ワンウェイクラッチによる動力の伝達がなされる第一の変速段と、前記ワンウェイクラッチによる動力の伝達がなされない第二の変速段とを有する有段変速機を備え、
前記第一の変速段では前記エンジンの始動時にエンジン回転数が前記車速および前記第一の変速段の変速比に基づく回転数まで低下しないと予測される場合、前記有段変速機の変速段を前記第二の変速段とし、前記クラッチを係合して前記エンジンを始動する
請求項3または4に記載の車両制御装置。
【請求項6】
前記車両に対して加速が要求されている場合、前記クラッチの係合タイミングを遅延させることなく、前記クラッチを係合した状態で前記エンジンを始動する
請求項2から4のいずれか1項に記載の車両制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−122497(P2012−122497A)
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願番号】特願2010−271300(P2010−271300)
【出願日】平成22年12月6日(2010.12.6)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願日】平成22年12月6日(2010.12.6)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]