
車両制御装置
【課題】負荷に応じて圧縮比が可変に制御されるエンジンを搭載した車両において、フューエルカットが実行される場合のドライバビリティの低下を抑制することができる車両制御装置を提供すること。
【解決手段】負荷に応じて圧縮比が可変に制御されるエンジンと、無段変速機と、を備え、アクセルオフに応じてエンジンに対する燃料の供給を停止するフューエルカットが実行される(S2−Y)場合、フューエルカットの開始時にエンジンの圧縮比に基づいて無段変速機の変速比を制御する(S6,S7)。
【解決手段】負荷に応じて圧縮比が可変に制御されるエンジンと、無段変速機と、を備え、アクセルオフに応じてエンジンに対する燃料の供給を停止するフューエルカットが実行される(S2−Y)場合、フューエルカットの開始時にエンジンの圧縮比に基づいて無段変速機の変速比を制御する(S6,S7)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両制御装置に関する。
【背景技術】
【0002】
従来、圧縮比を可変に制御可能なエンジンの技術が公知である。例えば、特許文献1には、圧縮比を変更可能な可変圧縮比機構を備え、機関運転条件に応じた圧縮比に制御する可変圧縮比内燃機関の制御装置の技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−147105号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
圧縮比が可変に制御されるエンジンでは、実際の圧縮比を目標の圧縮比に変化させるまでに所定の時間を要する。このため、負荷の変化に応じて圧縮比が変更される場合、負荷の変化に対して圧縮比の変化が遅れることで、車両加速度の応答性が低下する虞がある。例えば、アクセルオフに応じてフューエルカットが実行される場合に、圧縮比が変化して十分な減速力が得られるまでに時間を要することでドライバビリティの低下につながる虞がある。
【0005】
本発明の目的は、負荷に応じて圧縮比が可変に制御されるエンジンを搭載した車両において、フューエルカットが実行される場合のドライバビリティの低下を抑制することができる車両制御装置を提供することである。
【課題を解決するための手段】
【0006】
本発明の車両制御装置は、負荷に応じて圧縮比が可変に制御されるエンジンと、無段変速機と、を備え、アクセルオフに応じて前記エンジンに対する燃料の供給を停止するフューエルカットが実行される場合、前記フューエルカットの開始時に前記エンジンの圧縮比に基づいて前記無段変速機の変速比を制御することを特徴とする。
【0007】
上記車両制御装置において、前記フューエルカットの開始時に前記エンジンの圧縮比の増加に応じて前記無段変速機の変速比を減少させることが好ましい。
【0008】
上記車両制御装置において、前記フューエルカットの開始時に、負荷の変化に対応する前記エンジンの圧縮比の変化が完了した後の減速力の推定値に基づいて前記無段変速機の変速比を制御することが好ましい。
【0009】
上記車両制御装置において、前記フューエルカットの開始時に、負荷の変化に対応する前記エンジンの圧縮比の変化が完了するタイミングと前記無段変速機の変速が完了するタイミングとを同期させるように前記無段変速機の変速比を制御することが好ましい。
【0010】
上記車両制御装置において、前記フューエルカットの開始時に、前記エンジンの圧縮比の変化開始に対して、前記無段変速機の変速比の変化開始を遅延させることが好ましい。
【発明の効果】
【0011】
本発明に係る車両制御装置は、アクセルオフに応じてエンジンに対する燃料の供給を停止するフューエルカットが実行される場合、フューエルカットの開始時にエンジンの圧縮比に基づいて無段変速機の変速比を制御する。本発明に係る車両制御装置によれば、車両の減速力を適正なものとし、フューエルカットが実行される場合のドライバビリティの低下を抑制することができるという効果を奏する。
【図面の簡単な説明】
【0012】
【図1】図1は、実施形態に係る車両制御の動作を示すフローチャートである。
【図2】図2は、実施形態に係る車両の概略構成を示す図である。
【図3】図3は、実施形態に係る車両制御のタイムチャートである。
【発明を実施するための形態】
【0013】
以下に、本発明の実施形態に係る車両制御装置につき図面を参照しつつ詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記の実施形態における構成要素には、当業者が容易に想定できるものあるいは実質的に同一のものが含まれる。
【0014】
(実施形態)
図1から図3を参照して、実施形態について説明する。本実施形態は、車両制御装置に関する。図1は、実施形態に係る車両制御の動作を示すフローチャート、図2は、実施形態に係る車両の概略構成を示す図、図3は、実施形態に係る車両制御のタイムチャートである。
【0015】
可変圧縮比エンジンとCVT(無段変速機)との組合せにおいて、定常走行または加速状態からアクセルオフにて減速(フューエルカット)する場合、負荷の低下に応じてエンジンの圧縮比が低→高に移行する。圧縮比の変更には時間がかかるため、実際の圧縮比が目標の圧縮比となって十分な減速力を得られるようになるまでには時間がかかる。
【0016】
本実施形態の車両制御装置1−1は、CVTをアクセルオフ後すぐにアップシフトするのではなく、圧縮比の動きを見ながらアップシフトさせる。圧縮比がまだ低いときは、変速比をロー側に設定(エンジン回転数を高めに設定)し、十分な減速力が得られるようにする。よって、本実施形態の車両制御装置1−1によれば、フューエルカットが実行される場合のドライバビリティの低下を抑制することができる。
【0017】
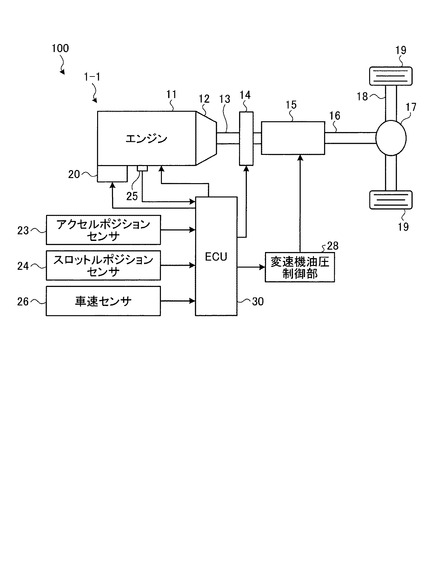
図2に示すように、車両100は、エンジン11、トルクコンバータ12、無段変速機15およびECU30を備える。また、本実施形態の車両制御装置1−1は、エンジン11、無段変速機15およびECU30を備える。
【0018】
エンジン11は、車両100の動力源である。エンジン11の回転軸には、トルクコンバータ12が連結されている。トルクコンバータ12の駆動軸13は、前後進切替機構14を介して無段変速機15と連結されている。無段変速機15は、プロペラシャフト16、デファレンシャルギア17およびドライブシャフト18を介して駆動輪19と接続されている。
【0019】
エンジン11が駆動すると、その動力が回転軸から出力され、トルクコンバータ12から前後進切替機構14を介して無段変速機15の入力軸に入力される。無段変速機15に入力された動力は、無段変速機15において設定された変速比で減速されて出力軸からプロペラシャフト16に出力される。プロペラシャフト16に入力された動力は、デファレンシャルギア17を介して左右のドライブシャフト18に伝達され、左右の駆動輪19を駆動して回転させることができる。
【0020】
エンジン11は、燃焼室における圧縮比を変更することができる圧縮比可変機構20を有する。圧縮比可変機構20は、電磁力等によって作動して圧縮比を変更するアクチュエータ、例えば電動モータを有している。圧縮比可変機構20のアクチュエータは、例えば、エンジン11のシリンダブロックをクランクケースに対して気筒の軸方向、すなわちピストンが往復動する方向に相対移動させて燃焼室の容積を変更することで圧縮比を変更する。なお、圧縮比可変機構20が圧縮比を変更する方法はこれに限定されるものではない。圧縮比可変機構20は、例えば、アクチュエータによって吸気バルブの閉じタイミングを変更したりすることによって圧縮比を変更するようにしてもよい。圧縮比可変機構20は、エンジン11の圧縮比を予め定められた範囲の任意の圧縮比に変更することができる。
【0021】
無段変速機15は、自動変速機であり、変速比を無段階に変化させることができる。無段変速機15は、例えば、ベルト式無段変速機である。無段変速機15の入力側部材(例えば、プライマリプーリ)と出力側部材(例えば、セカンダリプーリ)とは、ベルトを介して接続されている。無段変速機15は、エンジン11からの駆動力をベルトを介して入力側部材から出力側部材に伝達できると共に、入力側部材と出力側部材との回転数比である変速比を無段階(連続的)に変化させることができる。ここで、変速比γは、入力軸である入力側部材の回転速度を出力軸である出力側部材の回転速度で除算した値である。つまり、変速比γは、入力側部材と出力側部材との回転速度比に相当する。無段変速機15は、変速機油圧制御部28から供給される油圧によって制御される。
【0022】
ECU30は、コンピュータを有する電子制御ユニットである。ECU30は、エンジン11および無段変速機15を制御する機能を有する。ECU30には、アクセルポジションセンサ23、スロットルポジションセンサ24、エンジン回転数センサ25および車速センサ26が接続されており、各センサ23,24,25および26の検出結果を示す信号がECU30に出力される。アクセルポジションセンサ23は、アクセルペダルに対する踏込み量(アクセル開度)を検出する。スロットルポジションセンサ24は、電子スロットル装置におけるスロットル開度を検出する。エンジン回転数センサ25は、エンジン11の回転数を検出する。車速センサ26は、車両100の走行速度を検出する。
【0023】
ECU30は、取得した各センサの検出結果に基づいてエンジン11を制御する。ECU30は、例えば、エンジン11のインジェクタによる燃料噴射量、燃料噴射タイミング、点火プラグによる点火時期などを制御することができる。
【0024】
また、ECU30は、車両100の運転状態に応じてエンジン11の圧縮比を変更することができる。ECU30は、例えば、エンジン11の負荷に応じて圧縮比を可変に制御する。エンジン11の負荷は、例えば、吸入空気量、アクセル開度、スロットル開度、エンジン回転数、燃料噴射量などである。ECU30は、例えば、アクセル開度と車速とに基づいてエンジン負荷を算出するようにしてもよい。本実施形態では、エンジン負荷が大きい場合のエンジン11の圧縮比は、エンジン負荷が小さい場合の圧縮比よりも低い圧縮比とされる。
【0025】
ECU30は、変速機油圧制御部28を制御して無段変速機15を油圧制御することによって、変速制御を実行することができる。ECU30は、車両100の運転状態(例えば、車速、アクセル開度、ブレーキペダルストロークなど)と、制御マップ(例えば、機関回転数、スロットル開度に基づく最適燃費曲線、等出力線など)とに基づいて、エンジン11の運転状態が最適となるように無段変速機15の変速比を制御する。
【0026】
また、ECU30は、車両100の走行中にエンジン11に対する燃料の供給を停止するフューエルカット制御を実行することができる。ECU30は、予め定められたフューエルカット実行条件が成立した場合にフューエルカット制御を実行する。フューエルカット実行条件は、例えば、アクセル開度が所定の開度以下(一例として、開度0)であるアクセルオフの状態であり、かつ車速が所定の車速以上であることを含むものである。
【0027】
ここで、定常走行や加速状態からのアクセルオフによってフューエルカットを開始する場合、アクセル開度の減少に応じてエンジン負荷が低下するため、圧縮比が変更される。圧縮比可変機構20による圧縮比の変更には、所定の時間を要するため、以下に図3を参照して説明するように、フューエルカット制御の開始時に十分な減速度を得るまでに遅れが生じるという問題がある。
【0028】
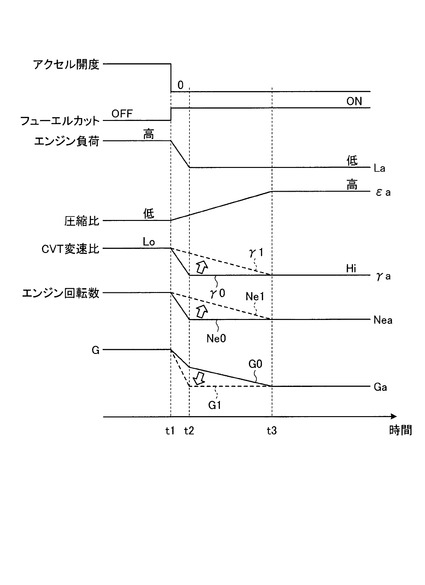
図3には、アクセル開度、フューエルカット実行フラグ、エンジン負荷、エンジン11の圧縮比ε、無段変速機(CVT)の変速比γ、エンジン回転数Neおよび車両加速度Gがそれぞれ示されている。ここで、車両加速度Gは、車両100の前後方向の加速度である。符号γ0,Ne0およびG0は、それぞれ本実施形態の車両制御装置1−1による車両制御が行われない従来における無段変速機15の変速比、エンジン回転数および車両加速度を示す。また、符号γ1,Ne1およびG1は、本実施形態の車両制御における変速比、エンジン回転数および車両加速度を示す。
【0029】
時刻t1においてアクセル開度が低下してアクセルオフとなり、フューエルカット実行フラグがOFFからONに変化する。これにより、フューエルカット制御が開始される。また、アクセル開度の低下により、エンジン負荷は低下する。エンジン負荷の低下に応じて、ECU30は、エンジン11の目標圧縮比を増加させる。また、ECU30は、エンジン負荷の低下に応じて、無段変速機15をアップシフトさせる。
【0030】
目標圧縮比の増加に応じて、圧縮比可変機構20のアクチュエータが圧縮比εを変更するが、実際の圧縮比εが目標圧縮比となるまでには、所定の時間を要する。つまり、エンジン負荷の低下に対して、圧縮比εの増加には遅れがある。エンジン負荷が時刻t2において低下後の値Laとなってから、実際の圧縮比εが低下後のエンジン負荷Laに対応する圧縮比εaとなる時刻t3までの間は、目標圧縮比に対して実際の圧縮比εが低圧縮側の値となる。
【0031】
エンジン11では、圧縮比が低いとエンジンフリクションが小さく、圧縮比が高いとエンジンフリクションが大きくなる。言い換えると、低圧縮比ではエンジンブレーキ力が小さく、高圧縮比ではエンジンブレーキ力が大きくなる。従って、実際の圧縮比εが目標圧縮比に収束する時刻t3までの過渡状態では、エンジンフリクションが不足し、十分な減速力を得られない状態となる。
【0032】
本実施形態の車両制御は、エンジン負荷の変化に対して、無段変速機15の変速比γの応答性が、圧縮比εの応答性よりも高いことに着目してなされるものである。エンジン負荷が変化した場合に、変速機油圧制御部28が無段変速機15の変速比γを目標変速比に追従させる応答性は、圧縮比可変機構20が圧縮比εを目標圧縮比に追従させる応答性よりも高い。変速機油圧制御部28は、例えば、変化するエンジン負荷に応じて、実質的な遅れなく変速比γ0をエンジン負荷に対応する目標変速比に追従させることができる。これにより、エンジン負荷の低下が終了した時刻t2において、変速比γ0は、低下後のエンジン負荷Laに対応する変速比γaまで低下している。
【0033】
一方、上記のように、圧縮比εはエンジン負荷の低下に対して遅れて増加する。圧縮比εが低下後のエンジン負荷Laに基づく目標圧縮比εaとなる時刻は、時刻t2よりも遅い時刻t3である。従って、従来のようにエンジン負荷の低下に対して遅れが生じないように無段変速機15をアップシフトさせた場合、変速比γ0の低下が圧縮比εの増加よりも速く進行する。無段変速機15のアップシフトが先行することで、エンジン回転数Ne0の低下によるエンジン11のフリクショントルクの低下が先行して生じる。このように、従来は圧縮比εの増加遅れによって減速度の増加が遅れ、かつ変速比γ0の低下による減速度の低下が先行することで、十分な減速力が得られるまでに時間を要していた。
【0034】
本実施形態の車両制御装置1−1は、アクセルオフに応じてフューエルカットが実行される場合、フューエルカット制御の開始時にエンジン11の圧縮比εに基づいて無段変速機15の変速比γを制御する。具体的には、エンジン負荷の低下に伴う無段変速機15のアップシフトを圧縮比εの変化に応じて進行させる。車両制御装置1−1は、例えば、アクセルオフ時のアップシフトを、エンジン11の圧縮比εを見ながら行い、圧縮比εが低いときは、アップシフトせずにエンジン回転数を高回転にする。これにより、フューエルカット制御の開始時にエンジン回転数Ne1を高回転に保ち、エンジン11のフリクショントルクを増加させると共に、ローギヤ化によって適正な減速力を確保する。例えば、車両制御装置1−1は、図3に示すように、エンジン負荷の低下が終了する時刻t2において、車両加速度G1を所望の値、すなわち低下後のエンジン負荷Laに対応する車両加速度Gaとするように無段変速機15の変速比γ1を制御する。よって、本実施形態の車両制御装置1−1によれば、アクセルオフ直後から狙いの減速力が得られるようにすることができる。
【0035】
また、車両制御装置1−1は、フューエルカットの開始時にエンジン11の圧縮比εの増加に応じて無段変速機15の変速比γ1を減少させる。車両制御装置1−1は、例えば、徐々に圧縮比εが上がるのに合わせてアップシフトし、減速力が一定となるように変速制御を行う。これにより、圧縮比εを変化させている間、狙いの減速力を維持することができる。よって、本実施形態の車両制御装置1−1によれば、アクセルオフに応じてフューエルカットが実行される場合に適正な減速度を確保してドライバビリティを向上させることができる。
【0036】
また、本実施形態のECU30は、フューエルカットの開始時に、エンジン負荷の変化に対応する圧縮比εの変化が完了するタイミング(時刻t3)と無段変速機15の変速が完了するタイミングとを同期させるように変速比γ1を制御する。これにより、圧縮比εの変化によるフリクショントルクの変化が終了するタイミングと、変速比γ1の変化によるフリクショントルクの変化が終了するタイミングとを同期させることができる。よって、無段変速機15のアップシフトが完了した後の減速力の変動が抑制される。
【0037】
図1を参照して、本実施形態の車両制御について説明する。図1に示す制御フローは、例えば、車両100の走行中に繰り返し実行される。
【0038】
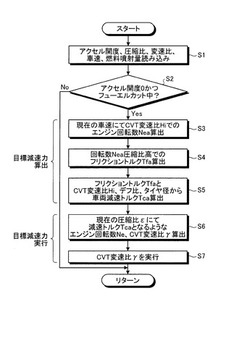
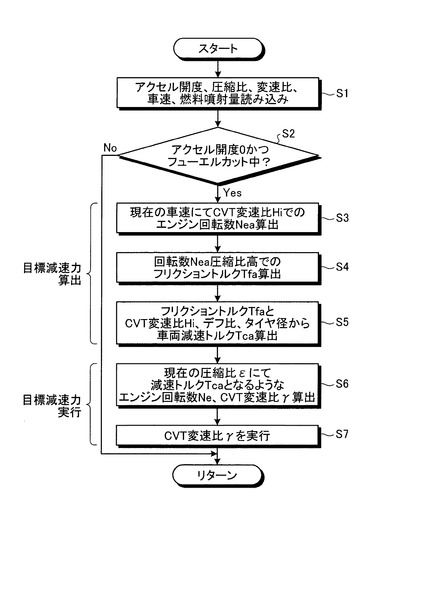
まず、ステップS1では、ECU30により、アクセル開度、圧縮比ε、変速比γ、車速、燃料噴射量が読み込まれる。ECU30は、例えば、制御用のパラメータを一時的に記憶する記憶部を有しており、この記憶部から現在の各パラメータの値を読み込む。ステップS1が実行されると、ステップS2に進む。
【0039】
ステップS2では、ECU30により、アクセル開度0かつフューエルカット中であるか否かが判定される。ECU30は、ステップS1で読み込んだパラメータに基づいてステップS2の判定を行うことができる。ステップS2の判定の結果、アクセル開度0かつフューエルカット中であると判定された場合(ステップS2−Y)にはステップS3に進み、そうでない場合(ステップS2−N)には本制御フローは終了する。
【0040】
ステップS3からステップS5では、目標減速力が算出される。目標減速力は、圧縮比εの変化および無段変速機15のアップシフトが終了した後(図3の時刻t3以降)に車両100に作用する減速力の推定値である。言い換えると、目標減速力は、現在車速において圧縮比εおよび変速比γをそれぞれ低下後のエンジン負荷Laに対応する値とした場合の車両100に発生する減速力の推定値である。この目標減速力を実現するように、ステップS5およびステップS6において無段変速機15の変速制御がなされる。
【0041】
ステップS3では、ECU30により、現在の車速にてCVT変速比Hiでのエンジン回転数Neaが算出される。ECU30は、現在の車速において無段変速機15を低下後のエンジン負荷Laに対応する変速比γaまでアップシフトさせた場合のアップシフト後のエンジン回転数Neaを算出する。ステップS3が実行されると、ステップS4に進む。
【0042】
ステップS4では、ECU30により、エンジン回転数Nea、圧縮比高でのフリクショントルクTfaが算出される。ステップS4では、無段変速機15の変速比γを低下後のエンジン負荷Laに対応する変速比γaとし、かつ圧縮比εを低下後のエンジン負荷Laに対応する圧縮比εaとしたときのエンジン11のフリクショントルクTfaが算出される。
【0043】
次に、ステップS5では、ECU30により、フリクショントルクTfaと変速比Hi、デフ比、タイヤ径から車両減速トルクTcaが算出される。ECU30は、ステップS4で算出されたフリクショントルクTfa、低下後のエンジン負荷Laに対応する変速比γa、デファレンシャルギア17のデフ比、タイヤ径に基づいて車両100の駆動輪19に作用する車両減速トルクTcaを算出する。ステップS5が実行されると、ステップS6に進む。
【0044】
ステップS6では、ECU30により、現在の圧縮比εにて車両減速トルクTcaとなるようなエンジン回転数Neおよび変速比γが算出される。ECU30は、現在の圧縮比εにおいてステップS5で算出された車両減速トルクTcaを実現できるエンジン回転数Neおよび変速比γを算出する。ステップS6で算出されるエンジン回転数Neおよび変速比γは、それぞれ本実施形態のエンジン回転数Ne1および変速比γ1に対応する。ステップS6が実行されると、ステップS7に進む。
【0045】
ステップS7では、ECU30により、CVT変速比γが実行される。ECU30は、ステップS6で算出したエンジン回転数Neおよび変速比γを実現するように、無段変速機15を変速させる。つまり、ECU30は、現在の圧縮比εにおいて低下後のエンジン負荷Laに対応する車両加速度Ga(目標減速力に対応する車両加速度Ga)を実現するように、圧縮比εに基づいて変速比γを制御する。これにより、本実施形態の車両制御によれば、車両加速度G1を速やかに所望の車両加速度、すなわち低下後のエンジン負荷Laに対応する車両加速度Gaとすることができる。ステップS7が実行されると、本制御フローは終了する。
【0046】
以上説明したように、本実施形態によれば、アクセルオフに応じてフューエルカットが実行される場合、フューエルカット制御の開始時にエンジン11の圧縮比εに基づいて無段変速機15の変速比γが制御される。車両制御装置1−1は、エンジン負荷の低下に対して変速機油圧制御部28による変速制御と圧縮比可変機構20による圧縮比制御とを協調制御することで、フューエルカット制御の開始時において適正な減速力を発生させることができる。よって、本実施形態の車両制御装置1−1によれば、アクセルオフの直後から狙いの減速力を得られるようにすることが可能となり、ドライバビリティの向上を図ることができる。
【0047】
なお、本実施形態では、負荷の変化に対する圧縮比εの変化が完了するタイミングと無段変速機15の変速が完了するタイミングとを同期させるように無段変速機15の変速比γが制御されたが、変速の完了タイミングは、これに限定されるものではない。例えば、狙いとする車両加速度Gaを実現するように無段変速機15の変速制御がなされる場合に、変速の完了タイミングが圧縮比εの変化の完了するタイミングに対して前後してもよい。
【0048】
また、本実施形態では、変速比γの変化が圧縮比εの変化と同時に開始されるが、これに限定されるものではない。例えば、フューエルカットの開始時に、圧縮比εの変化開始に対して変速比γの変化(例えば、アップシフト)の開始を遅らせるようにしてもよい。一例として、車両加速度G1が所望の車両加速度Gaに低下するまで無段変速機15の変速開始が遅延されてもよい。この場合、ECU30は、エンジン負荷の低下に対して無段変速機15を変速させずに圧縮比εを変化させる場合の圧縮比εと車両加速度Gとの対応関係を予め記憶しておき、この対応関係に基づき、圧縮比εが所望の車両加速度Gaに対応する圧縮比εとなるまで変速開始を遅延させるようにしてもよい。
【0049】
また、本実施形態では、変速比γ1の低下と圧縮比εの増加とが線形に対応するように無段変速機15の変速制御がなされるが、変速比γ1の変化の態様はこれに限定されるものではない。例えば、エンジン負荷が低下している間(時刻t1から時刻t2の間)と、エンジン負荷が低下した後(時刻t2以降)とで無段変速機15の変速速度を異ならせるようにしてもよい。例えば、時刻t2前は、時刻t2後よりも変速速度を遅くするようにしてもよい。なお、圧縮比εの変化に対するフリクショントルクの変化の度合いに基づいて、時刻t2前後の変速速度を決定するようにしてもよい。例えば、圧縮比εが高圧縮比の場合と低圧縮比の場合とのフリクショントルクの差が小さい場合、すなわち低圧縮比の場合に高圧縮比の場合ほどではないもののある程度の減速度が発生する場合、時刻t2前の変速速度を時刻t2後の変速速度よりも速くするようにしてもよい。
【0050】
また、本実施形態の「圧縮比εに基づく変速比γの制御」は、フューエルカット開始時の減速力の遅れの度合いや減速力の不足の度合い等に基づいて選択的に実行されてもよい。ここで、減速力の遅れの度合いは、例えば、エンジン負荷の低下が終了する時刻t2から、従来の車両加速度G0が所望の車両加速度Gaとなる時刻t3までの時間の予測値とすることができる。また、減速力の不足の度合いは、例えば、本実施形態の圧縮比εに基づく変速比γの制御を行った場合の車両加速度G1と従来の車両加速度G0との乖離の度合いや、低下後のエンジン負荷Laに対応する車両加速度Gaと従来の車両加速度G0との乖離の度合いとすることができる。例えば、減速力の遅れの度合いや減速力の不足の度合いが大きいときに限り、圧縮比εに基づく変速比γの制御を実行するようにしてもよい。
【0051】
なお、本実施形態において圧縮比εに基づく変速比γの制御が実行されるのは、アクセルオフに応じてフューエルカットが実行される場合であったが、当該制御を実行する条件は、これに限定されるものではない。例えば、アクセル開度が既にフューエルカット実行の条件を満たしている状態から、アクセル開度以外の条件がその後に成立してフューエルカットが開始されることがある。こうした場面において、フューエルカットの開始時に圧縮比εに基づいて変速比γが制御されるようにしてもよい。
【0052】
また、フューエルカットの実行時に限らず、エンジン負荷の増減量が大きいときやエンジン負荷の増減速度が大きいときに、本実施形態の圧縮比εに基づく変速比γの制御が実行されるようにしてもよい。
【0053】
(実施形態の変形例)
実施形態の変形例について説明する。エンジン11のフリクショントルクが変動する要因として、圧縮比εの他に、オルタネータによる負荷や可変容量エアコンによる負荷がある。これらの負荷の変化によるフリクショントルクの変動を考慮し、トータルのフリクショントルクを見て無段変速機15の変速制御がなされてもよい。例えば、トータルのフリクショントルクに基づいて、車両加速度G1を所望の車両加速度Gaとするように変速比γの制御がなされてもよい。
【0054】
また、圧縮比εに基づく変速比γの制御において、路面の勾配に基づく補正がなされてもよい。例えば、圧縮比εに基づく変速比γの制御において、登り勾配では、平坦路よりも変速比γ1を小さな変速比(Hi側の変速比)とするようにしてもよい。
【0055】
上記の実施形態に開示された内容は、適宜組み合わせて実行することができる。
【符号の説明】
【0056】
1−1 車両制御装置
11 エンジン
15 無段変速機
19 駆動輪
20 圧縮比可変機構
28 変速機油圧制御部
30 ECU
100 車両
【技術分野】
【0001】
本発明は、車両制御装置に関する。
【背景技術】
【0002】
従来、圧縮比を可変に制御可能なエンジンの技術が公知である。例えば、特許文献1には、圧縮比を変更可能な可変圧縮比機構を備え、機関運転条件に応じた圧縮比に制御する可変圧縮比内燃機関の制御装置の技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−147105号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
圧縮比が可変に制御されるエンジンでは、実際の圧縮比を目標の圧縮比に変化させるまでに所定の時間を要する。このため、負荷の変化に応じて圧縮比が変更される場合、負荷の変化に対して圧縮比の変化が遅れることで、車両加速度の応答性が低下する虞がある。例えば、アクセルオフに応じてフューエルカットが実行される場合に、圧縮比が変化して十分な減速力が得られるまでに時間を要することでドライバビリティの低下につながる虞がある。
【0005】
本発明の目的は、負荷に応じて圧縮比が可変に制御されるエンジンを搭載した車両において、フューエルカットが実行される場合のドライバビリティの低下を抑制することができる車両制御装置を提供することである。
【課題を解決するための手段】
【0006】
本発明の車両制御装置は、負荷に応じて圧縮比が可変に制御されるエンジンと、無段変速機と、を備え、アクセルオフに応じて前記エンジンに対する燃料の供給を停止するフューエルカットが実行される場合、前記フューエルカットの開始時に前記エンジンの圧縮比に基づいて前記無段変速機の変速比を制御することを特徴とする。
【0007】
上記車両制御装置において、前記フューエルカットの開始時に前記エンジンの圧縮比の増加に応じて前記無段変速機の変速比を減少させることが好ましい。
【0008】
上記車両制御装置において、前記フューエルカットの開始時に、負荷の変化に対応する前記エンジンの圧縮比の変化が完了した後の減速力の推定値に基づいて前記無段変速機の変速比を制御することが好ましい。
【0009】
上記車両制御装置において、前記フューエルカットの開始時に、負荷の変化に対応する前記エンジンの圧縮比の変化が完了するタイミングと前記無段変速機の変速が完了するタイミングとを同期させるように前記無段変速機の変速比を制御することが好ましい。
【0010】
上記車両制御装置において、前記フューエルカットの開始時に、前記エンジンの圧縮比の変化開始に対して、前記無段変速機の変速比の変化開始を遅延させることが好ましい。
【発明の効果】
【0011】
本発明に係る車両制御装置は、アクセルオフに応じてエンジンに対する燃料の供給を停止するフューエルカットが実行される場合、フューエルカットの開始時にエンジンの圧縮比に基づいて無段変速機の変速比を制御する。本発明に係る車両制御装置によれば、車両の減速力を適正なものとし、フューエルカットが実行される場合のドライバビリティの低下を抑制することができるという効果を奏する。
【図面の簡単な説明】
【0012】
【図1】図1は、実施形態に係る車両制御の動作を示すフローチャートである。
【図2】図2は、実施形態に係る車両の概略構成を示す図である。
【図3】図3は、実施形態に係る車両制御のタイムチャートである。
【発明を実施するための形態】
【0013】
以下に、本発明の実施形態に係る車両制御装置につき図面を参照しつつ詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記の実施形態における構成要素には、当業者が容易に想定できるものあるいは実質的に同一のものが含まれる。
【0014】
(実施形態)
図1から図3を参照して、実施形態について説明する。本実施形態は、車両制御装置に関する。図1は、実施形態に係る車両制御の動作を示すフローチャート、図2は、実施形態に係る車両の概略構成を示す図、図3は、実施形態に係る車両制御のタイムチャートである。
【0015】
可変圧縮比エンジンとCVT(無段変速機)との組合せにおいて、定常走行または加速状態からアクセルオフにて減速(フューエルカット)する場合、負荷の低下に応じてエンジンの圧縮比が低→高に移行する。圧縮比の変更には時間がかかるため、実際の圧縮比が目標の圧縮比となって十分な減速力を得られるようになるまでには時間がかかる。
【0016】
本実施形態の車両制御装置1−1は、CVTをアクセルオフ後すぐにアップシフトするのではなく、圧縮比の動きを見ながらアップシフトさせる。圧縮比がまだ低いときは、変速比をロー側に設定(エンジン回転数を高めに設定)し、十分な減速力が得られるようにする。よって、本実施形態の車両制御装置1−1によれば、フューエルカットが実行される場合のドライバビリティの低下を抑制することができる。
【0017】
図2に示すように、車両100は、エンジン11、トルクコンバータ12、無段変速機15およびECU30を備える。また、本実施形態の車両制御装置1−1は、エンジン11、無段変速機15およびECU30を備える。
【0018】
エンジン11は、車両100の動力源である。エンジン11の回転軸には、トルクコンバータ12が連結されている。トルクコンバータ12の駆動軸13は、前後進切替機構14を介して無段変速機15と連結されている。無段変速機15は、プロペラシャフト16、デファレンシャルギア17およびドライブシャフト18を介して駆動輪19と接続されている。
【0019】
エンジン11が駆動すると、その動力が回転軸から出力され、トルクコンバータ12から前後進切替機構14を介して無段変速機15の入力軸に入力される。無段変速機15に入力された動力は、無段変速機15において設定された変速比で減速されて出力軸からプロペラシャフト16に出力される。プロペラシャフト16に入力された動力は、デファレンシャルギア17を介して左右のドライブシャフト18に伝達され、左右の駆動輪19を駆動して回転させることができる。
【0020】
エンジン11は、燃焼室における圧縮比を変更することができる圧縮比可変機構20を有する。圧縮比可変機構20は、電磁力等によって作動して圧縮比を変更するアクチュエータ、例えば電動モータを有している。圧縮比可変機構20のアクチュエータは、例えば、エンジン11のシリンダブロックをクランクケースに対して気筒の軸方向、すなわちピストンが往復動する方向に相対移動させて燃焼室の容積を変更することで圧縮比を変更する。なお、圧縮比可変機構20が圧縮比を変更する方法はこれに限定されるものではない。圧縮比可変機構20は、例えば、アクチュエータによって吸気バルブの閉じタイミングを変更したりすることによって圧縮比を変更するようにしてもよい。圧縮比可変機構20は、エンジン11の圧縮比を予め定められた範囲の任意の圧縮比に変更することができる。
【0021】
無段変速機15は、自動変速機であり、変速比を無段階に変化させることができる。無段変速機15は、例えば、ベルト式無段変速機である。無段変速機15の入力側部材(例えば、プライマリプーリ)と出力側部材(例えば、セカンダリプーリ)とは、ベルトを介して接続されている。無段変速機15は、エンジン11からの駆動力をベルトを介して入力側部材から出力側部材に伝達できると共に、入力側部材と出力側部材との回転数比である変速比を無段階(連続的)に変化させることができる。ここで、変速比γは、入力軸である入力側部材の回転速度を出力軸である出力側部材の回転速度で除算した値である。つまり、変速比γは、入力側部材と出力側部材との回転速度比に相当する。無段変速機15は、変速機油圧制御部28から供給される油圧によって制御される。
【0022】
ECU30は、コンピュータを有する電子制御ユニットである。ECU30は、エンジン11および無段変速機15を制御する機能を有する。ECU30には、アクセルポジションセンサ23、スロットルポジションセンサ24、エンジン回転数センサ25および車速センサ26が接続されており、各センサ23,24,25および26の検出結果を示す信号がECU30に出力される。アクセルポジションセンサ23は、アクセルペダルに対する踏込み量(アクセル開度)を検出する。スロットルポジションセンサ24は、電子スロットル装置におけるスロットル開度を検出する。エンジン回転数センサ25は、エンジン11の回転数を検出する。車速センサ26は、車両100の走行速度を検出する。
【0023】
ECU30は、取得した各センサの検出結果に基づいてエンジン11を制御する。ECU30は、例えば、エンジン11のインジェクタによる燃料噴射量、燃料噴射タイミング、点火プラグによる点火時期などを制御することができる。
【0024】
また、ECU30は、車両100の運転状態に応じてエンジン11の圧縮比を変更することができる。ECU30は、例えば、エンジン11の負荷に応じて圧縮比を可変に制御する。エンジン11の負荷は、例えば、吸入空気量、アクセル開度、スロットル開度、エンジン回転数、燃料噴射量などである。ECU30は、例えば、アクセル開度と車速とに基づいてエンジン負荷を算出するようにしてもよい。本実施形態では、エンジン負荷が大きい場合のエンジン11の圧縮比は、エンジン負荷が小さい場合の圧縮比よりも低い圧縮比とされる。
【0025】
ECU30は、変速機油圧制御部28を制御して無段変速機15を油圧制御することによって、変速制御を実行することができる。ECU30は、車両100の運転状態(例えば、車速、アクセル開度、ブレーキペダルストロークなど)と、制御マップ(例えば、機関回転数、スロットル開度に基づく最適燃費曲線、等出力線など)とに基づいて、エンジン11の運転状態が最適となるように無段変速機15の変速比を制御する。
【0026】
また、ECU30は、車両100の走行中にエンジン11に対する燃料の供給を停止するフューエルカット制御を実行することができる。ECU30は、予め定められたフューエルカット実行条件が成立した場合にフューエルカット制御を実行する。フューエルカット実行条件は、例えば、アクセル開度が所定の開度以下(一例として、開度0)であるアクセルオフの状態であり、かつ車速が所定の車速以上であることを含むものである。
【0027】
ここで、定常走行や加速状態からのアクセルオフによってフューエルカットを開始する場合、アクセル開度の減少に応じてエンジン負荷が低下するため、圧縮比が変更される。圧縮比可変機構20による圧縮比の変更には、所定の時間を要するため、以下に図3を参照して説明するように、フューエルカット制御の開始時に十分な減速度を得るまでに遅れが生じるという問題がある。
【0028】
図3には、アクセル開度、フューエルカット実行フラグ、エンジン負荷、エンジン11の圧縮比ε、無段変速機(CVT)の変速比γ、エンジン回転数Neおよび車両加速度Gがそれぞれ示されている。ここで、車両加速度Gは、車両100の前後方向の加速度である。符号γ0,Ne0およびG0は、それぞれ本実施形態の車両制御装置1−1による車両制御が行われない従来における無段変速機15の変速比、エンジン回転数および車両加速度を示す。また、符号γ1,Ne1およびG1は、本実施形態の車両制御における変速比、エンジン回転数および車両加速度を示す。
【0029】
時刻t1においてアクセル開度が低下してアクセルオフとなり、フューエルカット実行フラグがOFFからONに変化する。これにより、フューエルカット制御が開始される。また、アクセル開度の低下により、エンジン負荷は低下する。エンジン負荷の低下に応じて、ECU30は、エンジン11の目標圧縮比を増加させる。また、ECU30は、エンジン負荷の低下に応じて、無段変速機15をアップシフトさせる。
【0030】
目標圧縮比の増加に応じて、圧縮比可変機構20のアクチュエータが圧縮比εを変更するが、実際の圧縮比εが目標圧縮比となるまでには、所定の時間を要する。つまり、エンジン負荷の低下に対して、圧縮比εの増加には遅れがある。エンジン負荷が時刻t2において低下後の値Laとなってから、実際の圧縮比εが低下後のエンジン負荷Laに対応する圧縮比εaとなる時刻t3までの間は、目標圧縮比に対して実際の圧縮比εが低圧縮側の値となる。
【0031】
エンジン11では、圧縮比が低いとエンジンフリクションが小さく、圧縮比が高いとエンジンフリクションが大きくなる。言い換えると、低圧縮比ではエンジンブレーキ力が小さく、高圧縮比ではエンジンブレーキ力が大きくなる。従って、実際の圧縮比εが目標圧縮比に収束する時刻t3までの過渡状態では、エンジンフリクションが不足し、十分な減速力を得られない状態となる。
【0032】
本実施形態の車両制御は、エンジン負荷の変化に対して、無段変速機15の変速比γの応答性が、圧縮比εの応答性よりも高いことに着目してなされるものである。エンジン負荷が変化した場合に、変速機油圧制御部28が無段変速機15の変速比γを目標変速比に追従させる応答性は、圧縮比可変機構20が圧縮比εを目標圧縮比に追従させる応答性よりも高い。変速機油圧制御部28は、例えば、変化するエンジン負荷に応じて、実質的な遅れなく変速比γ0をエンジン負荷に対応する目標変速比に追従させることができる。これにより、エンジン負荷の低下が終了した時刻t2において、変速比γ0は、低下後のエンジン負荷Laに対応する変速比γaまで低下している。
【0033】
一方、上記のように、圧縮比εはエンジン負荷の低下に対して遅れて増加する。圧縮比εが低下後のエンジン負荷Laに基づく目標圧縮比εaとなる時刻は、時刻t2よりも遅い時刻t3である。従って、従来のようにエンジン負荷の低下に対して遅れが生じないように無段変速機15をアップシフトさせた場合、変速比γ0の低下が圧縮比εの増加よりも速く進行する。無段変速機15のアップシフトが先行することで、エンジン回転数Ne0の低下によるエンジン11のフリクショントルクの低下が先行して生じる。このように、従来は圧縮比εの増加遅れによって減速度の増加が遅れ、かつ変速比γ0の低下による減速度の低下が先行することで、十分な減速力が得られるまでに時間を要していた。
【0034】
本実施形態の車両制御装置1−1は、アクセルオフに応じてフューエルカットが実行される場合、フューエルカット制御の開始時にエンジン11の圧縮比εに基づいて無段変速機15の変速比γを制御する。具体的には、エンジン負荷の低下に伴う無段変速機15のアップシフトを圧縮比εの変化に応じて進行させる。車両制御装置1−1は、例えば、アクセルオフ時のアップシフトを、エンジン11の圧縮比εを見ながら行い、圧縮比εが低いときは、アップシフトせずにエンジン回転数を高回転にする。これにより、フューエルカット制御の開始時にエンジン回転数Ne1を高回転に保ち、エンジン11のフリクショントルクを増加させると共に、ローギヤ化によって適正な減速力を確保する。例えば、車両制御装置1−1は、図3に示すように、エンジン負荷の低下が終了する時刻t2において、車両加速度G1を所望の値、すなわち低下後のエンジン負荷Laに対応する車両加速度Gaとするように無段変速機15の変速比γ1を制御する。よって、本実施形態の車両制御装置1−1によれば、アクセルオフ直後から狙いの減速力が得られるようにすることができる。
【0035】
また、車両制御装置1−1は、フューエルカットの開始時にエンジン11の圧縮比εの増加に応じて無段変速機15の変速比γ1を減少させる。車両制御装置1−1は、例えば、徐々に圧縮比εが上がるのに合わせてアップシフトし、減速力が一定となるように変速制御を行う。これにより、圧縮比εを変化させている間、狙いの減速力を維持することができる。よって、本実施形態の車両制御装置1−1によれば、アクセルオフに応じてフューエルカットが実行される場合に適正な減速度を確保してドライバビリティを向上させることができる。
【0036】
また、本実施形態のECU30は、フューエルカットの開始時に、エンジン負荷の変化に対応する圧縮比εの変化が完了するタイミング(時刻t3)と無段変速機15の変速が完了するタイミングとを同期させるように変速比γ1を制御する。これにより、圧縮比εの変化によるフリクショントルクの変化が終了するタイミングと、変速比γ1の変化によるフリクショントルクの変化が終了するタイミングとを同期させることができる。よって、無段変速機15のアップシフトが完了した後の減速力の変動が抑制される。
【0037】
図1を参照して、本実施形態の車両制御について説明する。図1に示す制御フローは、例えば、車両100の走行中に繰り返し実行される。
【0038】
まず、ステップS1では、ECU30により、アクセル開度、圧縮比ε、変速比γ、車速、燃料噴射量が読み込まれる。ECU30は、例えば、制御用のパラメータを一時的に記憶する記憶部を有しており、この記憶部から現在の各パラメータの値を読み込む。ステップS1が実行されると、ステップS2に進む。
【0039】
ステップS2では、ECU30により、アクセル開度0かつフューエルカット中であるか否かが判定される。ECU30は、ステップS1で読み込んだパラメータに基づいてステップS2の判定を行うことができる。ステップS2の判定の結果、アクセル開度0かつフューエルカット中であると判定された場合(ステップS2−Y)にはステップS3に進み、そうでない場合(ステップS2−N)には本制御フローは終了する。
【0040】
ステップS3からステップS5では、目標減速力が算出される。目標減速力は、圧縮比εの変化および無段変速機15のアップシフトが終了した後(図3の時刻t3以降)に車両100に作用する減速力の推定値である。言い換えると、目標減速力は、現在車速において圧縮比εおよび変速比γをそれぞれ低下後のエンジン負荷Laに対応する値とした場合の車両100に発生する減速力の推定値である。この目標減速力を実現するように、ステップS5およびステップS6において無段変速機15の変速制御がなされる。
【0041】
ステップS3では、ECU30により、現在の車速にてCVT変速比Hiでのエンジン回転数Neaが算出される。ECU30は、現在の車速において無段変速機15を低下後のエンジン負荷Laに対応する変速比γaまでアップシフトさせた場合のアップシフト後のエンジン回転数Neaを算出する。ステップS3が実行されると、ステップS4に進む。
【0042】
ステップS4では、ECU30により、エンジン回転数Nea、圧縮比高でのフリクショントルクTfaが算出される。ステップS4では、無段変速機15の変速比γを低下後のエンジン負荷Laに対応する変速比γaとし、かつ圧縮比εを低下後のエンジン負荷Laに対応する圧縮比εaとしたときのエンジン11のフリクショントルクTfaが算出される。
【0043】
次に、ステップS5では、ECU30により、フリクショントルクTfaと変速比Hi、デフ比、タイヤ径から車両減速トルクTcaが算出される。ECU30は、ステップS4で算出されたフリクショントルクTfa、低下後のエンジン負荷Laに対応する変速比γa、デファレンシャルギア17のデフ比、タイヤ径に基づいて車両100の駆動輪19に作用する車両減速トルクTcaを算出する。ステップS5が実行されると、ステップS6に進む。
【0044】
ステップS6では、ECU30により、現在の圧縮比εにて車両減速トルクTcaとなるようなエンジン回転数Neおよび変速比γが算出される。ECU30は、現在の圧縮比εにおいてステップS5で算出された車両減速トルクTcaを実現できるエンジン回転数Neおよび変速比γを算出する。ステップS6で算出されるエンジン回転数Neおよび変速比γは、それぞれ本実施形態のエンジン回転数Ne1および変速比γ1に対応する。ステップS6が実行されると、ステップS7に進む。
【0045】
ステップS7では、ECU30により、CVT変速比γが実行される。ECU30は、ステップS6で算出したエンジン回転数Neおよび変速比γを実現するように、無段変速機15を変速させる。つまり、ECU30は、現在の圧縮比εにおいて低下後のエンジン負荷Laに対応する車両加速度Ga(目標減速力に対応する車両加速度Ga)を実現するように、圧縮比εに基づいて変速比γを制御する。これにより、本実施形態の車両制御によれば、車両加速度G1を速やかに所望の車両加速度、すなわち低下後のエンジン負荷Laに対応する車両加速度Gaとすることができる。ステップS7が実行されると、本制御フローは終了する。
【0046】
以上説明したように、本実施形態によれば、アクセルオフに応じてフューエルカットが実行される場合、フューエルカット制御の開始時にエンジン11の圧縮比εに基づいて無段変速機15の変速比γが制御される。車両制御装置1−1は、エンジン負荷の低下に対して変速機油圧制御部28による変速制御と圧縮比可変機構20による圧縮比制御とを協調制御することで、フューエルカット制御の開始時において適正な減速力を発生させることができる。よって、本実施形態の車両制御装置1−1によれば、アクセルオフの直後から狙いの減速力を得られるようにすることが可能となり、ドライバビリティの向上を図ることができる。
【0047】
なお、本実施形態では、負荷の変化に対する圧縮比εの変化が完了するタイミングと無段変速機15の変速が完了するタイミングとを同期させるように無段変速機15の変速比γが制御されたが、変速の完了タイミングは、これに限定されるものではない。例えば、狙いとする車両加速度Gaを実現するように無段変速機15の変速制御がなされる場合に、変速の完了タイミングが圧縮比εの変化の完了するタイミングに対して前後してもよい。
【0048】
また、本実施形態では、変速比γの変化が圧縮比εの変化と同時に開始されるが、これに限定されるものではない。例えば、フューエルカットの開始時に、圧縮比εの変化開始に対して変速比γの変化(例えば、アップシフト)の開始を遅らせるようにしてもよい。一例として、車両加速度G1が所望の車両加速度Gaに低下するまで無段変速機15の変速開始が遅延されてもよい。この場合、ECU30は、エンジン負荷の低下に対して無段変速機15を変速させずに圧縮比εを変化させる場合の圧縮比εと車両加速度Gとの対応関係を予め記憶しておき、この対応関係に基づき、圧縮比εが所望の車両加速度Gaに対応する圧縮比εとなるまで変速開始を遅延させるようにしてもよい。
【0049】
また、本実施形態では、変速比γ1の低下と圧縮比εの増加とが線形に対応するように無段変速機15の変速制御がなされるが、変速比γ1の変化の態様はこれに限定されるものではない。例えば、エンジン負荷が低下している間(時刻t1から時刻t2の間)と、エンジン負荷が低下した後(時刻t2以降)とで無段変速機15の変速速度を異ならせるようにしてもよい。例えば、時刻t2前は、時刻t2後よりも変速速度を遅くするようにしてもよい。なお、圧縮比εの変化に対するフリクショントルクの変化の度合いに基づいて、時刻t2前後の変速速度を決定するようにしてもよい。例えば、圧縮比εが高圧縮比の場合と低圧縮比の場合とのフリクショントルクの差が小さい場合、すなわち低圧縮比の場合に高圧縮比の場合ほどではないもののある程度の減速度が発生する場合、時刻t2前の変速速度を時刻t2後の変速速度よりも速くするようにしてもよい。
【0050】
また、本実施形態の「圧縮比εに基づく変速比γの制御」は、フューエルカット開始時の減速力の遅れの度合いや減速力の不足の度合い等に基づいて選択的に実行されてもよい。ここで、減速力の遅れの度合いは、例えば、エンジン負荷の低下が終了する時刻t2から、従来の車両加速度G0が所望の車両加速度Gaとなる時刻t3までの時間の予測値とすることができる。また、減速力の不足の度合いは、例えば、本実施形態の圧縮比εに基づく変速比γの制御を行った場合の車両加速度G1と従来の車両加速度G0との乖離の度合いや、低下後のエンジン負荷Laに対応する車両加速度Gaと従来の車両加速度G0との乖離の度合いとすることができる。例えば、減速力の遅れの度合いや減速力の不足の度合いが大きいときに限り、圧縮比εに基づく変速比γの制御を実行するようにしてもよい。
【0051】
なお、本実施形態において圧縮比εに基づく変速比γの制御が実行されるのは、アクセルオフに応じてフューエルカットが実行される場合であったが、当該制御を実行する条件は、これに限定されるものではない。例えば、アクセル開度が既にフューエルカット実行の条件を満たしている状態から、アクセル開度以外の条件がその後に成立してフューエルカットが開始されることがある。こうした場面において、フューエルカットの開始時に圧縮比εに基づいて変速比γが制御されるようにしてもよい。
【0052】
また、フューエルカットの実行時に限らず、エンジン負荷の増減量が大きいときやエンジン負荷の増減速度が大きいときに、本実施形態の圧縮比εに基づく変速比γの制御が実行されるようにしてもよい。
【0053】
(実施形態の変形例)
実施形態の変形例について説明する。エンジン11のフリクショントルクが変動する要因として、圧縮比εの他に、オルタネータによる負荷や可変容量エアコンによる負荷がある。これらの負荷の変化によるフリクショントルクの変動を考慮し、トータルのフリクショントルクを見て無段変速機15の変速制御がなされてもよい。例えば、トータルのフリクショントルクに基づいて、車両加速度G1を所望の車両加速度Gaとするように変速比γの制御がなされてもよい。
【0054】
また、圧縮比εに基づく変速比γの制御において、路面の勾配に基づく補正がなされてもよい。例えば、圧縮比εに基づく変速比γの制御において、登り勾配では、平坦路よりも変速比γ1を小さな変速比(Hi側の変速比)とするようにしてもよい。
【0055】
上記の実施形態に開示された内容は、適宜組み合わせて実行することができる。
【符号の説明】
【0056】
1−1 車両制御装置
11 エンジン
15 無段変速機
19 駆動輪
20 圧縮比可変機構
28 変速機油圧制御部
30 ECU
100 車両
【特許請求の範囲】
【請求項1】
負荷に応じて圧縮比が可変に制御されるエンジンと、
無段変速機と、
を備え、アクセルオフに応じて前記エンジンに対する燃料の供給を停止するフューエルカットが実行される場合、前記フューエルカットの開始時に前記エンジンの圧縮比に基づいて前記無段変速機の変速比を制御する
ことを特徴とする車両制御装置。
【請求項2】
前記フューエルカットの開始時に前記エンジンの圧縮比の増加に応じて前記無段変速機の変速比を減少させる
請求項1に記載の車両制御装置。
【請求項3】
前記フューエルカットの開始時に、負荷の変化に対応する前記エンジンの圧縮比の変化が完了した後の減速力の推定値に基づいて前記無段変速機の変速比を制御する
請求項1または2に記載の車両制御装置。
【請求項4】
前記フューエルカットの開始時に、負荷の変化に対応する前記エンジンの圧縮比の変化が完了するタイミングと前記無段変速機の変速が完了するタイミングとを同期させるように前記無段変速機の変速比を制御する
請求項1から3のいずれか1項に記載の車両制御装置。
【請求項5】
前記フューエルカットの開始時に、前記エンジンの圧縮比の変化開始に対して、前記無段変速機の変速比の変化開始を遅延させる
請求項1から4のいずれか1項に記載の車両制御装置。
【請求項1】
負荷に応じて圧縮比が可変に制御されるエンジンと、
無段変速機と、
を備え、アクセルオフに応じて前記エンジンに対する燃料の供給を停止するフューエルカットが実行される場合、前記フューエルカットの開始時に前記エンジンの圧縮比に基づいて前記無段変速機の変速比を制御する
ことを特徴とする車両制御装置。
【請求項2】
前記フューエルカットの開始時に前記エンジンの圧縮比の増加に応じて前記無段変速機の変速比を減少させる
請求項1に記載の車両制御装置。
【請求項3】
前記フューエルカットの開始時に、負荷の変化に対応する前記エンジンの圧縮比の変化が完了した後の減速力の推定値に基づいて前記無段変速機の変速比を制御する
請求項1または2に記載の車両制御装置。
【請求項4】
前記フューエルカットの開始時に、負荷の変化に対応する前記エンジンの圧縮比の変化が完了するタイミングと前記無段変速機の変速が完了するタイミングとを同期させるように前記無段変速機の変速比を制御する
請求項1から3のいずれか1項に記載の車両制御装置。
【請求項5】
前記フューエルカットの開始時に、前記エンジンの圧縮比の変化開始に対して、前記無段変速機の変速比の変化開始を遅延させる
請求項1から4のいずれか1項に記載の車両制御装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−153190(P2012−153190A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−12138(P2011−12138)
【出願日】平成23年1月24日(2011.1.24)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年1月24日(2011.1.24)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]