
車両制御装置
【課題】路面勾配ごとの加速度推定値を記したマップを必要とせず、かつ、車両への積載重量の影響を受けることなく、Gセンサの0点補正が行えるようにする。
【解決手段】制動力が発生させられている制動状態ではなく、かつ、駆動力が発生させられている駆動状態でもない自由降下状態を判定し、自由降下状態の際のGセンサ値をオフセットとしてGセンサ3の0点補正を行う。自由降下状態の際には、車両への積載重量などの影響を受けることなくGセンサ3の検出信号から求められるGセンサ値は0になるはずであり、0でなければそれがオフセットと考えられる。したがって、自由降下状態の際にGセンサ値をオフセットとしてGセンサ3の0点補正を行うことで、車両への積載重量の影響を受けることなく、Gセンサ3の0点補正を行うことが可能となる。また、Gセンサ3の0点補正を行うのに、路面勾配ごとの加速度推定値を記したマップを必要とすることもない。
【解決手段】制動力が発生させられている制動状態ではなく、かつ、駆動力が発生させられている駆動状態でもない自由降下状態を判定し、自由降下状態の際のGセンサ値をオフセットとしてGセンサ3の0点補正を行う。自由降下状態の際には、車両への積載重量などの影響を受けることなくGセンサ3の検出信号から求められるGセンサ値は0になるはずであり、0でなければそれがオフセットと考えられる。したがって、自由降下状態の際にGセンサ値をオフセットとしてGセンサ3の0点補正を行うことで、車両への積載重量の影響を受けることなく、Gセンサ3の0点補正を行うことが可能となる。また、Gセンサ3の0点補正を行うのに、路面勾配ごとの加速度推定値を記したマップを必要とすることもない。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の前後方向の加速度を加速度センサ(以下、Gセンサという)で検出し、その加速度を用いて車両制御を行う車両制御装置に関するものである。
【背景技術】
【0002】
従来、特許文献1、2において、Gセンサの0点補正を実施している装置が開示されている。具体的には、特許文献1に記載の装置では、坂路において路面勾配により車両が下方に移動するという車両ずり下がり状態における加速度変化量と出力軸トルクとの関係と、予め記憶しておいた路面勾配ごとの加速度推定値を記したマップとに基づいて、路面の勾配を推定し、Gセンサの0点補正を行っている。また、特許文献2に記載の装置では、所定距離走行ごとのGセンサの出力に基づいて演算した加速度の平均値と現在のGセンサの出力値を比較することで、Gセンサの0点補正を行っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−31980号公報
【特許文献2】特開2008−145152号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の装置では、路面勾配ごとの加速度推定値を記したマップが必要になる。また、出力軸トルクとずり下がり時の加速度変化量との関係は、車両の積載重量の影響を直接受けて大きく変化するため、積載重量に応じて正確な0点補正を行うことができなくなることがある。さらに、車両の停止後の発進時に進行方向と逆方向への車両ずり下がり状態でしか0点補正を行うことができない。
【0005】
また、特許文献2に記載の装置では、最初に所定距離走行したときに得た初回のGセンサの出力の0点が正しいことを前提として、その後に0点がシフトしたときの0点補正を行うことになるが、初回の0点が必ずしも正しいとは限らない。
【0006】
本発明は上記点に鑑みて、路面勾配ごとの加速度推定値を記したマップを必要とせず、かつ、車両への積載重量の影響を排除あるいは低減させ、的確にGセンサの0点補正を行うことができる車両制御装置を提供することを第1の目的とする。さらに、車両の進行方向と逆方向の車両ずり下がり状態以外のときにもGセンサの0点補正が行えるようにすることを第2の目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、請求項1に記載の発明では、車両が走行中であることを検出する走行検出手段(11、110、205)と、車両に制動力を付与するための制動手段による制動状態を検出する制動状態検出手段(13、130、230)と、車両に付与される駆動力の状態を検出する駆動状態検出手段(14、120、225)と、車両に駆動力も制動力も発生しない状態である自由降下状態を判定する自由降下状態判定手段(110〜130、205、225、230)とを備え、自由降下状態判定手段(110〜130、205、225、230)は、走行検出手段(11、110、205)にて前記車両が走行中であることが検出され、制動状態検出手段(13、130、230)が車両に制動力が付与されていない状態を検出し、かつ、駆動状態検出手段(14、120、225)が車両の加速方向にも減速方向にも駆動力が発生しない無駆動力状態を検出した場合を自由降下状態と判定し、加速度補正手段(14、150、245)は、自由降下状態判定手段(110〜130、205、225、230)が自由降下状態と判定した際に加速度検出手段(12、15、100、200、235)が検出した加速度より求めた0点からのオフセットに基づいて、直接加速度検出手段(12、100、200、235)の検出した加速度を補正することを特徴としている。
【0008】
このように、制動力が発生させられている制動状態ではなく、かつ、駆動力が発生させられている駆動状態でもない自由降下状態の際に加速度検出手段(12、15、100、200、235)が検出した加速度より0点からのオフセットを求め、このオフセットに基づいてGセンサ(3)の0点補正を行う。これにより、車両への積載重量の影響を受けることなく、Gセンサ(3)の0点補正を行うことが可能となる。また、Gセンサ(3)の0点補正を行うのに、路面勾配ごとの加速度推定値を記したマップを必要とすることもない。
【0009】
さらに、自由降下状態は、車両の進行方向と逆方向に車両が移動させられるような車両ずり下がり状態だけでなく、重量の影響で車両の進行方向に車両が移動させられうような場合もある。このような場合でも、同様に0点補正を行えるため、車両の進行方向と逆方向の車両ずり下がり状態以外のときにもGセンサ(3)の0点補正を行うことが可能となる。
【0010】
請求項2に記載の発明では、加速度補正手段(14、150)は、自由降下状態判定手段(110〜130)が自由降下状態と判定した際に加速度検出手段(12、100)が検出した加速度を0点からのオフセットとすることを特徴としている。
【0011】
自由降下状態の際には、車両の進行または後退方向に作用する力は重力のみとなり、重力に従って車両に発生する進行または後退方向の加速度は車両への積載重量などの影響を受けることはない。重力に従って自由落下中の物体の内部が無重力状態となるのと同様に、自由降下状態の際にはGセンサ(3)の検出信号から求められる加速度は0になるはずであり、0でなければそれがオフセットと考えられる。したがって、自由降下状態の際にGセンサ(3)の検出信号から求められる加速度をオフセットとしてGセンサ(3)の0点補正を行うことができる。
【0012】
請求項3に記載の発明では、加速度補正手段(14、245)は、自由降下状態判定手段(205、225、230)が自由降下状態と判定した際に間接加速度検出手段(15、235)が検出した加速度と、自由降下状態と判定される前の車両静止時に直接加速度検出手段(12、200)の検出した加速度とに基づいて0点からのオフセットを求めることことを特徴としている。
【0013】
このように、車両停止中の状態から走行を開始した際に、それが自由降下状態による走行であれば、自由降下状態と判定される前の車両静止時に直接加速度検出手段(12、200)の検出した加速度と接加速度検出手段(15、235)が検出した加速度との差を演算することでオフセットを求めることができる。
【0014】
請求項4に記載の発明では、駆動状態検出手段(14、120、225)は、エンジンの停止、クラッチの非接続、ギアがニュートラル位置のうちの少なくとも1つが検出されたことをもって、無駆動力状態と判定することを特徴としている。
【0015】
このように、エンジンの停止、クラッチの非接続、ギアがニュートラル位置のうちの少なくとも1つが検出されると、無駆動力状態であると判定することができる。
【0016】
請求項5に記載の発明では、加速度補正手段は、車両速度検出手段が検出した車両速度が所定の閾速度よりも低い低速度域の際にのみ、直接加速度検出手段(12、100、200)の検出した加速度を補正することを特徴としている。
【0017】
直接加速度検出手段(12、100、200)の検出した加速度は、走行抵抗などを阻害要因として、本来の自由降下状態の際に想定される値からずれる。走行抵抗については、車両速度が高いほど大きくなることから、Gセンサ(3)の0点補正自体を車両速度が所定の閾速度よりも低い低速度域の際にのみ行うようにすれば、走行抵抗などによる影響を少なくでき、的確な0点補正を行うことが可能となる。
【0018】
請求項6に記載の発明では、加速度補正手段は、車両速度検出手段が検出した車両速度に応じた走行抵抗に基づいて、自由降下状態判定手段(110〜130、205、225、230)が自由降下状態と判定した際に加速度検出手段(12、15、100、200、235)が検出した加速度より求めた0点からのオフセットを補正することを特徴としている。
【0019】
このように、車両速度検出手段が検出した車両速度に応じた走行抵抗に基づいて、Gセンサ(3)の検出信号から演算した加速度を補正することで、走行抵抗を加味したより正確な加速度に補正することができる。
【0020】
請求項7に記載の発明では、加速度補正手段は、間接加速度検出手段が検出した加速度に応じた回転慣性抗力に基づいて、自由降下状態判定手段(110〜130、205、225、230)が自由降下状態と判定した際に加速度検出手段(12、15、100、200、235)が検出した加速度より求めた0点からのオフセットを補正することを特徴としている。
【0021】
このように、間接加速度検出手段が検出した加速度に応じた回転慣性抗力に基づいて、Gセンサ(3)の検出信号から演算した加速度を補正することで、回転慣性抵抗力を加味したより正確な加速度に補正することができる。
【0022】
請求項8に記載の発明では、加速度補正手段は、車輪の回転数から算出した走行距離と走行経路から算出した走行距離との差と車輪のタイヤ空気圧および車両重量の少なくとも1つの情報に基づいて、直接加速度検出手段(12、100、200)の検出した加速度を補正することを特徴としている。
【0023】
このように、車輪の回転数から算出した走行距離と走行経路から算出した走行距離との差と車輪のタイヤ空気圧および車両重量の少なくとも1つの情報に基づいて、Gセンサ(3)の検出信号から演算した加速度を補正することで、タイヤ半径の変化を加味したより正確な加速度に補正することができる。
【0024】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【図面の簡単な説明】
【0025】
【図1】本発明の第1実施形態にかかるGセンサの0点補正装置を適用した車両制御システムのブロック構成を示した図である。
【図2】Gセンサ0点補正処理の詳細を示したフローチャートである。
【図3】アイドルストップ制御が実行される車両において、Gセンサ値0点補正を行った場合のタイミングチャートである。
【図4】本発明の第2実施形態にかかるGセンサの0点補正装置を適用した車両制御システムのブロック構成を示した図である。
【図5】Gセンサ0点補正処理の詳細を示したフローチャートである。
【図6】アイドルストップ制御が実行される車両において、Gセンサ値0点補正を行った場合のタイミングチャートである。
【図7】(a)、(b)は、車両速度と走行抵抗Fregの関係および走行抵抗Fregと減速度Gregの関係を示した図である。
【図8】(a)、(b)は、車両加速度と慣性抗力Fineの関係および慣性抗力Fineと減速度Gineの関係を示した図である。
【図9】(a)、(b)は、タイヤ空気圧に対するタイヤ半径や荷重に対するタイヤ半径の関係を示した図である。
【発明を実施するための形態】
【0026】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
【0027】
(第1実施形態)
本発明の第1実施形態について説明する。本実施形態では、Gセンサで検出される加速度に基づく車両制御が実行される車両制御システムに対してGセンサの0点補正装置を適用した場合について説明する。
【0028】
図1は、本実施形態にかかるGセンサの0点補正装置を適用した車両制御システムのブロック構成を示した図である。この図を参照して車両制御システムの構成について説明する。
【0029】
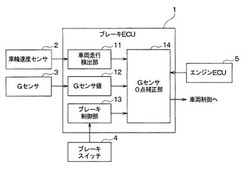
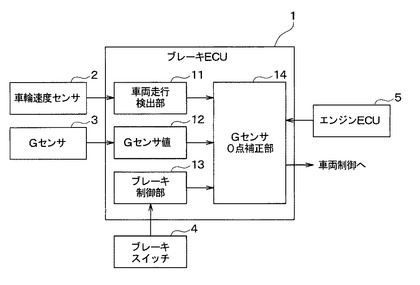
図1に示すように、車両制御システムは、ブレーキECU(電子制御装置)1によってGセンサの0点補正を行い、このGセンサの0点補正を行った後のGセンサ値に基づいて車両制御、例えば坂路保持制御において路面勾配に応じた制動力付与を行うなどの制御を実行する。なお、ブレーキECU1では、アンチスキッド制御などの一般的なブレーキ制御についても実行しているが、ここでは本発明の特徴にかかわるGセンサの0点補正やそれに関わる車両制御についてのみ説明する。
【0030】
ブレーキECU1には、車輪速度センサ2やGセンサ3の検出信号が入力されると共に、ブレーキスイッチ(BRK)4のスイッチ信号およびエンジンECU5からの情報が入力され、これらの入力に基づいて車両ずり下がり状態判定を行っている。
【0031】
具体的には、ブレーキECU1は、車両走行検出部11、Gセンサ値演算部12、ブレーキ制御部13およびGセンサ0点補正部14を有した構成とされ、Gセンサ0点補正部14が各部11〜13から得た情報に基づいてGセンサ3の0点補正を実行する。なお、本実施形態では、このブレーキECU1のうちGセンサ0点補正の実行に用いられる部分、つまり上記各部11〜14がGセンサ3の0点補正装置を構成するものである。ここではブレーキECU1を例に挙げたが、他のECUなどでGセンサ3の0点補正を実行しても構わない。
【0032】
車両走行検出部11は、車輪速度センサ2から入力される検出信号に基づいて車輪速度を演算し、車両が走行中であることを検出する。本実施形態では、後述するように車両が自由降下状態に至っている際にGセンサ3の0点補正を行う。自由降下状態とは、車両に制駆動力のいずれも発生しておらず、路面勾配に応じて、重力に従って加速している状態を意味している。自由降下状態の際には、車両が駆動力や制動力の影響を受けることなく路面勾配に応じて重力に従って加速する。このため、自由降下状態の際にはGセンサ3の出力は、重力の影響を受けなくなり、Gセンサ3の出力が0でなければ、それが0点からの誤差、つまりオフセットとなる。
【0033】
したがって、自由降下状態の際のGセンサ3の出力を得ることで0点からのオフセットを求めることができるが、制駆動力が発生しない場合であっても、路面の凹凸などで車両が停止している場合には自由降下状態とは言えない。このような状態を排除すべく、車両走行検出部11によって車両が走行中であることを検出している。この情報がGセンサ0点補正部14に入力される。
【0034】
Gセンサ値演算部12は、Gセンサ3から入力される検出信号に基づいてGセンサ値を算出する。このとき得られるGセンサ値は、0点補正前の生値であるため、Gセンサ値にオフセットが有る場合には、そのオフセットが含まれた値となっている。このGセンサ値もGセンサ0点補正部14に入力される。
【0035】
ブレーキ制御部13は、ABS制御等の各種制御を実行する部分であるが、ブレーキスイッチ4から入力されるスイッチ信号に基づいて、車両にブレーキペダル踏み込みに基づく制動力を発生させている最中であるか否かという情報を扱っている。このため、ブレーキ制御部13で取り扱っているブレーキスイッチ4のスイッチ信号がGセンサ0点補正部14に入力されるようにしている。
【0036】
Gセンサ0点補正部14は、車両走行検出部11やGセンサ値演算部12およびブレーキ制御部13から入力される各種情報に加え、エンジンECU5から伝えられるエンジンの稼動状態に関する情報に基づいてGセンサ3の0点補正を行うことで、オフセットが含まれない正確なGセンサ値を演算する。このGセンサ0点補正部14にて0点補正が為された正確なGセンサ値が、各種車両制御を実行するECU等へ伝えられ、車両制御に用いられる。Gセンサ0点補正部14による具体的な0点補正の方法については後で詳述する。
【0037】
なお、エンジンECU5は、アクセルペダルの操作量に応じてスロットルバルブの開度を調整することで所望のエンジンパワーを得るなどの一般的なエンジン制御を実行しており、エンジンの稼動状態について把握している。このエンジンの稼動状態を示す情報がエンジンECU5から車両制御要求部13に入力されるようにしている。ここではエンジンECU5からGセンサ0点補正部14に対してエンジンの稼動状態に関する情報が伝えられるようにしているが、他のECUでエンジンの稼動状態を把握している場合には、そのECUからエンジンの稼動状態がGセンサ0点補正部14に入力されるようにしても良い。例えば、燃料の消費量低減などを目的として、所定条件を満たした場合にアイドリングストップを行うエンジンのアイドルストップ制御を行うアイドルストップECUでは、エンジンの停止・再始動に関する情報を扱っている。このため、アイドルストップECUからエンジンの稼動状態に関する情報を得るようにしても良い。
【0038】
このように、本実施形態にかかるGセンサ0点補正装置が適用された車両制御システムが構成されている。続いて、このように構成された車両制御システムに備えられたブレーキECU1が実行するGセンサ0点補正処理について説明する。
【0039】
図2は、Gセンサ0点補正処理の詳細を示したフローチャートである。この図に示すGセンサ0点補正処理は、イグニッションスイッチがオンされている際に所定の制御周期毎に実行される。
【0040】
まず、ステップ100では、入力処理を行う。この処理は、ブレーキECU1における各部11〜14にて実行される。具体的には、各部11〜14は、車輪速度センサ2やGセンサ3から検出信号を入力すると共に、エンジンECU5からのエンジンの稼動状態に関する情報やブレーキスイッチ4からのスイッチ信号を入力する。また、車両走行検出部11では、入力した車輪速度センサ2の検出信号から車輪速度Vwを演算すると共に演算した車輪速度Vwから推定車体速度Vを演算する。この推定車体速度Vにより車両が走行中であるか否かを検出することができる。さらに、Gセンサ値演算部12では、入力したGセンサ3の検出信号に基づいてGセンサ値を演算する。
【0041】
次に、ステップ110〜140において、Gセンサ0点補正の条件を満たしているか否かを判定し、満たしている場合にステップ150に進んでGセンサ0点補正を行う。これらの処理は、車両走行検出部11やGセンサ値演算部12やブレーキ制御部13からの情報およびエンジンECU4からのエンジンの稼動状態に関する情報に基づいて、Gセンサ0点補正部13が実行する。
【0042】
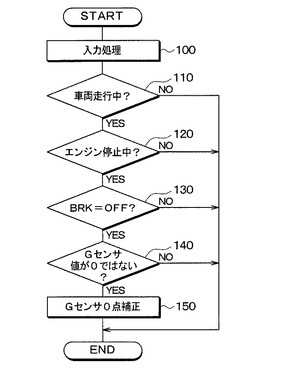
具体的には、ステップ110〜130の各処理により、自由降下状態であることを判定する。ステップ110では、車両走行中であるか否かを判定する。この判定は、車両走行検出部11での検出結果に基づいて行われる。上述したように、自由降下状態の際のGセンサ3の出力を得ることで0点からのオフセットを求めることができるが、制駆動力が発生しない場合であっても、路面の凹凸などで車両が停止している場合には自由降下状態とは言えない。したがって、ステップ110で車両走行中という条件を設定し、路面の凹凸などで車両が停止している場合を排除している。
【0043】
また、ステップ120では、エンジン停止中であるかを判定する。この判定は、エンジンECU4から入力されるエンジンの稼動状態に関する情報に基づいて行われる。ステップ130では、ブレーキスイッチ4がオンしているか否かを判定する。この判定は、ブレーキ制御部13で扱われているブレーキスイッチ4のスイッチ信号に基づいて為される。
【0044】
自由降下状態は、車両に制駆動力のいずれも発生しておらず、路面勾配に応じて重力に従って加速している状態であり、エンジンが停止中で、かつ、ブレーキスイッチ4がオフの状態であれば、制動力と駆動力の双方が発生していない状態である。このため、ステップ110で路面の凹凸などで車両が停止しているような場合を排除しつつ、ステップ120、130の各判定を行うことで、自由降下状態であることを判定することができる。
【0045】
このようにして、ステップ110〜130の各条件を満たして自由降下状態であることが判定されると、ステップ140でGセンサ値が0ではないかが判定される。この判定は、Gセンサ値演算部12の演算結果に基づいて行われる。ここで、Gセンサ値が0でなければ、Gセンサ値にオフセットが含まれていることを意味しているため、Gセンサ値の0点補正を行う必要がある。
【0046】
したがって、ステップ140でも肯定判定されれば、Gセンサ値の0点補正を行う必要性があることから、ステップ150に進んでGセンサ0点補正を行う。すなわち、自由降下状態であれば本来はGセンサ値が0であるはずであり、Gセンサ値が0でなければ、その値がオフセットに相当している。このため、Gセンサ値のオフセットとして、そのとき発生しているオフセットを記憶すると共に、Gセンサ3の検出信号に基づいて演算される0点補正前のGセンサ値に対して、オフセット分を除くことで0点補正後のGセンサ値を求める。これにより、Gセンサ値0点補正処理が完了する。
【0047】
この後は、Gセンサ3の検出信号に基づいて演算される0点補正前のGセンサ値に対して、オフセット分を除くことで0点補正が行われ、この0点補正後のGセンサ値が車両制御に用いるGセンサ値として車両制御を実行する各種ECUに伝えられる。これにより、正確な0点補正が行われたGセンサ値に基づいて、適切な車両制御を実行することができる。
【0048】
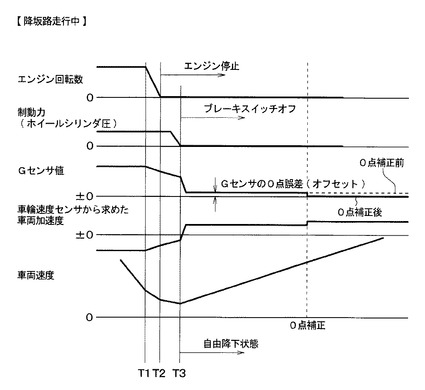
図3は、アイドルストップ制御が実行される車両において、本実施形態によるGセンサ値0点補正を行った場合のタイミングチャートである。この図に示されるように、アイドルストップ制御では、例えば、ブレーキ踏込みがなされている状況で、かつ、車両速度が所定の速度閾値以下になると、エンジン停止を行うことにより燃料消費量の低減などが図られる。このため、時点T1において、ブレーキペダル踏み込みが為され、かつ、車両速度所定の速度閾値以下になると、アイドルストップECUからエンジン停止の要求が出されることでエンジンが停止させられる。これにより、徐々にエンジン回転数が低下し、時点T2でエンジン回転数が0になってエンジン停止の状態となる。
【0049】
この状態において、ブレーキペダルの踏み込みが解除されていき、時点T3でブレーキスイッチがオフになると、路面勾配に応じて車両ずり下がり状態となり、自由降下状態となる。このとき、Gセンサ値が正確であれば0になるはずであり、Gセンサ値が0でなければ、それが0点からの誤差(オフセット)である。したがって、このときのGセンサ値をオフセットとして記憶し、これを今後のGセンサ値の演算の際に補正に用いれば、オフセットを除いた正確なGセンサ値を演算することが可能となる。
【0050】
以上説明したように、本実施形態では、制動力が発生させられている制動状態ではなく、かつ、駆動力が発生させられている駆動状態でもない自由降下状態を判定し、自由降下状態の際のGセンサ値をオフセットとしてGセンサ3の0点補正を行うようにしている。自由降下状態の際には、車両への積載重量などの影響を受けることなくGセンサ3の検出信号から求められるGセンサ値は0になるはずであり、0でなければそれがオフセットと考えられる。したがって、自由降下状態の際にGセンサ値をオフセットとしてGセンサ3の0点補正を行うことで、車両への積載重量の影響を受けることなく、Gセンサ3の0点補正を行うことが可能となる。また、Gセンサ3の0点補正を行うのに、路面勾配ごとの加速度推定値を記したマップを必要とすることもない。
【0051】
さらに、自由降下状態は、車両の進行方向と逆方向に車両が移動させられるような車両ずり下がり状態だけでなく、重量の影響で車両の進行方向に車両が移動させられうような場合もある。このような場合でも、同様に0点補正を行えるため、車両の進行方向と逆方向の車両ずり下がり状態以外のときにもGセンサの0点補正を行うことが可能となる。
【0052】
(第2実施形態)
本発明の第2実施形態について説明する。本実施形態は、第1実施形態に対してGセンサ値0点補正の方法を変更したものであり、その他に関しては第1実施形態と同様であるため、第1実施形態と異なる部分についてのみ説明する。
【0053】
図4は、本実施形態にかかるGセンサ3の0点補正装置を適用した車両制御システムのブロック構成を示した図である。この図に示すように、本実施形態の車両制御システムに備えられたブレーキECU1は、車体加速度演算部15が備えられており、車輪速度センサ2の検出信号に基づいて車体加速度(車両加速度)の演算を行っている。
【0054】
具体的には、車体加速度演算部15は、車輪速度センサ2から入力される検出信号に基づいて車輪加速度を演算する。車輪速度センサ2からは、車輪の回転に応じて出力されるパルス信号が検出信号としてブレーキECU1に入力されるため、車体加速度演算部15は、このパルス信号のパルス数に基づいて各車輪の車輪速度Vwを演算すると共に、その車輪速度Vwから推定車体速度Vを演算し、さらに推定車体速度Vの変化量(微分値)を求めることで車体加速度dVを演算する。
【0055】
そして、本実施形態のGセンサ0点補正部14は、Gセンサ値演算部12で演算されたGセンサ値と車体加速度演算部15で演算された車体加速度dVとに基づいて、Gセンサ3の0点補正を行う。
【0056】
例えば、坂路において車両が停止している状態から自由降下状態に至った場合、車両停止中にGセンサ3の検出信号から演算したGセンサ値と、自由降下状態に至った時の車体加速度dVとが一致するはずである。これが一致しない場合には、Gセンサ3の検出信号から演算したGセンサ値にオフセットを含まれているのであり、そのGセンサ値と自由降下状態に至った時の車体加速度dVとの差がオフセットとなる。これに基づいて、本実施形態のGセンサ値0点補正を行っている。
【0057】
続いて、本実施形態のブレーキECU1が実行するGセンサ0点補正処理について説明する。図5は、本実施形態のGセンサ0点補正処理の詳細を示したフローチャートである。この図に示すGセンサ0点補正処理は、イグニッションスイッチがオンされている際に所定の制御周期毎に実行される。
【0058】
まず、ステップ200では、第1実施形態で説明した図2のステップ100と同様の処理を行う。そして、ステップ205に進み、車両停止中であるか否かを判定する。この判定は、車両走行検出部11での検出結果に基づいて行われる。そして、肯定判定されればステップ210に進み、Gセンサ値を記憶しておく。
【0059】
続いて、車両停止中の状態から車両が動いてステップ205で否定判定されると、ステップ215に進み、走行開始時間を測定する。走行開始時間とは、車両停止状態から車両走行中に移行したときにおける車両走行中に移行してからの経過時間を意味している。すなわち、車両停止状態から車両走行中に移行した場合、移行して直ぐのときにはGセンサ値が十分に安定しておらず、まだ重力の影響による成分を含んだGセンサ値となっている。このため、走行開始時間を測定したのち、ステップ220に進み、走行開始時間が規定時間内、すなわちGセンサ値が十分に安定すると想定される時間以上、かつ、その時間が経過してから直ぐと考えられる時間の範囲内であるか否かを判定する。
【0060】
そして、ステップ220で肯定判定されると、ステップ225、230において、第1実施形態で説明した図2のステップ120、130と同様の処理を行うことで、車両が自由降下状態であるか否かを判定する。これらステップ225、230の両判定によって車両が自由降下状態であると判定されると、ステップ240に進み、車体加速度演算部15にて、車輪速度Vwを用いて、推定車体速度Vを演算すると共にそれを微分することで車体加速度dVを演算する。
【0061】
この後、ステップ240に進み、車体加速度dVとステップ210で記憶しておいたGセンサ値とが乖離しているか否かを判定する。例えば、車体加速度dVとステップ210で記憶しておいたGセンサ値との差が所定の閾値以上であれば、これらが乖離していると判定している。そして、ステップ240で肯定判定されれば、ステップ245に進んでGセンサ値0点補正を行う。
【0062】
具体的には、Gセンサ3にオフセットがなければ、車体加速度dVとステップ210で記憶しておいたGセンサ値とは一致する。これが一致しないのであれば、Gセンサ3にオフセットが含まれていると言える。このため、車体加速度dVとステップ210で記憶しておいたGセンサ値との差をオフセットとして記憶すると共に、Gセンサ3の検出信号に基づいて演算される0点補正前のGセンサ値に対して、オフセット分を除くことで0点補正後のGセンサ値を求める。これにより、Gセンサ値0点補正処理が完了する。
【0063】
この後は、Gセンサ3の検出信号に基づいて演算される0点補正前のGセンサ値に対して、オフセット分を除くことで0点補正が行われ、この0点補正後のGセンサ値が車両制御に用いるGセンサ値として車両制御を実行する各種ECUに伝えられる。これにより、正確な0点補正が行われたGセンサ値に基づいて、適切な車両制御を実行することができる。
【0064】
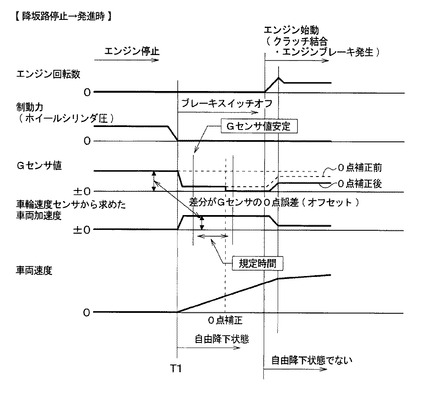
図6は、アイドルストップ制御が実行される車両において、本実施形態によるGセンサ値0点補正を行った場合のタイミングチャートである。この図に示されるように、アイドルストップ制御によりエンジン停止とされ、車両停止したのち、車両発進の際にブレーキペダルを離して時点T1において制動力がなくなって自由降下状態になったとする。これ以前には、Gセンサ3は路面勾配に応じた重力の影響を受けた状態となっているため、Gセンサ3の検出信号から演算したGセンサ値は路面勾配に応じた重力に対応する値となっている。そして、時点T1において自由降下状態になると、それから車両が走行を開始し、Gセンサ値は徐々に低下し、ある程度時間が経過すると安定した値となる。このときの値は、Gセンサ3にオフセットがなければ0となるが、オフセットがあれば0にならない。
【0065】
一方、自由降下状態になったときには、車輪が回転して車両が走行を開始するため、車輪速度が発生する。そして、このときの車体加速度dVは、車両が路面勾配に応じた重力によって走行させられた状態であることから、その直前の車両停止時のGセンサ3の検出信号から演算したGセンサ値と対応した値になり、車体加速度dVとGセンサ値との差がGセンサ3のオフセットとなる。したがって、走行開始時間が規定時間内の際に、車体加速度dVとGセンサ値との差を演算し、これをオフセットとして記憶すると共に、これを今後のGセンサ値の演算の際に補正に用いれば、オフセットを除いた正確なGセンサ値を演算することが可能となる。
【0066】
以上説明したように、車両停止中の状態から走行を開始した際に、それが自由降下状態による走行であれば、車体加速度dVとGセンサ値との差を演算することでオフセットを求め、Gセンサ3の0点補正を行うようにしている。このようにしても、Gセンサ3の0点補正を行うことができる。この場合にも、自由降下状態を利用してオフセットを求めているため、車両への積載重量などの影響を受けることなくGセンサ3の0点補正を行うことが可能となる。したがって、第1実施形態と同様の効果を得ることができる。
【0067】
(他の実施形態)
上記実施形態では、自由降下状態の一例として、アイドルストップ制御が実行される車両のずり下がり状態を例に挙げたが、自由降下状態となるどのような状況においても、上記のようにGセンサ3の0点補正を行うことができる。特に、走行中でもエンジン停止されるアイドルストップ制御が実行される車両やハイブリッド車両などにおいては、Gセンサ3の0点補正を行う頻度を多くすることができ、より正確なGセンサ値を得ることが可能となる。
【0068】
また、無駆動力状態となるような状況としてエンジン停止を例に挙げたが、例えば、クラッチが非接続のときやギアがニュートラル(N)位置とされている場合などにも無駆動力状態となるため、エンジン停止以外でもGセンサ3の0点補正を行うことができる。
【0069】
さらに、上記各実施形態では、エンジン停止かつブレーキスイッチ4がオフの際を制駆動力のいずれも発生しておらず、路面勾配に応じて重力に従って加速している自由降下状態としている。しかしながら、実際には、エンジン停止かつブレーキスイッチ4がオフの際にも、制駆動力が全く0になるとは限らない等、様々な阻害要因が発生する。例えば、阻害要因として、(1)車両が動くことによる走行抵抗、すなわち摺動部の摩擦や空気抵抗が発生すること、(2)タイヤなどが回転しながら走行するため、加速時に回転する部分の回転慣性の影響を受けること、(3)タイヤ径が変化すると車輪速度センサ2の検出信号を用いて演算した車体加速度dVに誤差が発生することが挙げられる。これらの影響により、自由降下状態において、車輪速度センサ2の検出信号に基づいて演算した車体加速度dVとGセンサ3の検出信号から得られるGセンサ値とが、本来の自由降下状態の際に想定される値からずれる。したがって、このような阻害要因を考慮に入れた補正を行うようにすると好ましい。以下、この補正方法について説明する。
【0070】
(1)車両が動くことによる走行抵抗を加味した補正方法
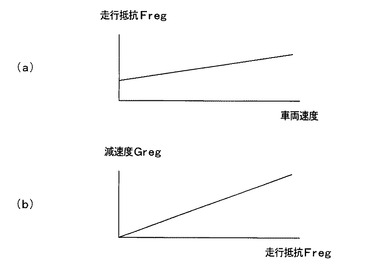
車両速度から走行抵抗Fregを算出したのち、走行抵抗Fregから走行抵抗分の減速度Gregを算出する。車両速度と走行抵抗Fregの関係および走行抵抗Fregと減速度Gregの関係は、それぞれ、図7(a)、(b)に示すマップのような関係で表される。このため、予めこれらの関係を示すマップを用意しておき、車輪速度センサ2の検出信号に基づいて演算した推定車体速度Vを車両速度として、そこから走行抵抗Fregを算出し、さらに減速度Gregを算出するようにすればよい。例えば、走行抵抗Fregについては、事前に各速度ごとに水平路面で定常走行を行い、そのときの駆動力から算出することができる。さらに、走行抵抗Fregについては、車重を減速度Gregで割ることで算出することができる。
【0071】
そして、このようにして減速度Gregを算出したら、上記各実施形態のようにして求めたオフセットに対してさらに減速度Gregを足すことで0点からのオフセットを補正し、Gセンサ3の検出信号から演算したGセンサ値のオフセットとして除去することで、走行抵抗を加味したより正確なGセンサ値に補正することができる。
【0072】
また、走行抵抗については、車両速度が高いほど大きくなることから、Gセンサ3の0点補正自体を車両速度が所定の閾速度よりも低い低速度域の際にのみ行うようにすれば、ここで説明したような走行抵抗を加味した補正を行う必要もない。さらに、走行抵抗については、路面状態に応じて予測できないこともあり得る。このため、悪路のように、走行抵抗に影響を及ぼすような路面状態では、ここで説明したような補正を行っても正確に走行抵抗を加味した補正を行うことができないことから、悪路の場合にはGセンサ3の0点補正を行わないようにしても良い。
【0073】
(2)回転慣性抗力の影響を加味した補正方法
車両加速度から慣性抗力Fineを算出したのち、慣性抗力Fineから回転慣性分の減速度Gineを算出することができる。車両加速度と慣性抗力Fineの関係および慣性抗力Fineと減速度Gineの関係は、それぞれ、図8(a)、(b)に示すマップのような関係で表される。このため、予めこれらの関係を示すマップを用意しておき、車輪速度センサ2の検出信号に基づいて演算した車体加速度dVを車両加速度として、そこから慣性抗力Fineを算出し、さらに減速度Gineを算出するようにすればよい。例えば、車両加速度と慣性抗力Fineの関係については、事前にテストベンチでホイールにセットしたタイヤを回転させ、一定の抵抗を与えたときの回転速度変化からタイヤの回転慣性力が求まるため、これを基準に車両の装着数(4輪車なら4本)を掛けて、回転加速度を車両加速度に換算することで事前に算出できる。また、慣性抵抗Fineに対する減速度Gineの関係については、車重を慣性抵抗Fineで割ることによって算出することができる。
【0074】
そして、このようにして減速度Gineを算出したら、上記各実施形態のようにして求めたオフセットに対してさらに減速度Gineを足すことで0点からのオフセットを補正し、Gセンサ3の検出信号から演算したGセンサ値のオフセットとして除去することで、回転慣性の影響を加味したより正確なGセンサ値に補正することができる。
【0075】
(3)タイヤ半径の変化を加味した補正方法
タイヤ半径は、タイヤ空気圧に応じて変化する。このため、タイヤ空気圧検出装置を用いてタイヤ空気圧を検出し、タイヤ空気圧に対応するタイヤ半径を算出することで、算出したタイヤ半径における基準タイヤ半径に対する比から、加速度補正値Kpを算出することができる。また、タイヤ半径は荷重(車両重量)に応じても変化する。このため、ハイトセンサ等を用いて車輪に加わる荷重を測定し、測定した荷重に対応するタイヤ半径における基準荷重時のタイヤ半径の比から、加速度補正値Kwを算出することができる。例えば、タイヤ空気圧に対するタイヤ半径や荷重に対するタイヤ半径の関係は、それぞれ、図9(a)、(b)に示すマップのような関係で表される。このため、予めこれらの関係を示すマップを用意しておき、検出したタイヤ空気圧や荷重と対応するタイヤ半径を算出し、算出したタイヤ半径/基準タイヤ半径より、加速度補正値Kp、Kwを演算できる。
【0076】
また、走行経路から求められる走行距離と、車輪速度センサの検出信号、つまりタイヤ回転数から求められる走行距離との差は、タイヤ半径の変化を表している。このため、次式のようにして、走行距離から加速度補正値Kdを演算することができる。なお、次式において、ナビゲーション装置で算出した走行距離は地図データに基づいて走行経路から算出したものである。
【0077】
(数1)
Kd=1.0+((ナビゲーション装置で算出した走行距離−タイヤ回転数から演算した走行距離)/ナビゲーション装置で算出した走行距離)
そして、このように加速度補正値Kp、Kw、Kdを算出したら、Gセンサ3の検出信号から演算したGセンサ値よりオフセット分を除去したのち、さらに加速度補正値Kp,Kw、Kdのいずれか1つを係数として掛け合わせることにより、タイヤ半径の変化を加味した補正後のGセンサ値とすることができる。
【0078】
なお、ここでは加速度補正値Kp、Kw、Kdのいずれか1つを補正係数として用いるようにしているが、複数を用いることもできる。その場合、各加速度補正値Kp、Kw、Kdの平均値を用いたりすれば良い。
【0079】
なお、図1中のブレーキECU1の各部11〜15や図2および図5中に示したステップは、各種処理を実行する手段に対応するものである。具体的には、ブレーキECU1のうち車輪加速度演算部11やステップ110、205の処理を行っている部分が走行検出手段、Gセンサ値演算部12や車体加速度演算部15およびステップ100、200、235の処理を行っている部分が加速度検出手段や直接加速度検出手段および間接加速度検出手段、ブレーキ制御部13やステップ130、230の処理を行っている部分が制動状態検出手段、Gセンサ0点補正部14やステップ150、245の処理を行っている部分が加速度補正手段、ステップ120、225の処理を行っている部分が駆動状態検出手段、ステップ110〜130、205、225、230の処理を実行する部分が自由降下状態判定手段に相当する。
【符号の説明】
【0080】
1 ブレーキECU
2 車輪速度センサ
3 Gセンサ
4 ブレーキスイッチ
5 エンジンECU
11 車両走行検出部
12 Gセンサ値演算部
13 ブレーキ制御部
14 Gセンサ0点補正部
15 車体加速度演算部
【技術分野】
【0001】
本発明は、車両の前後方向の加速度を加速度センサ(以下、Gセンサという)で検出し、その加速度を用いて車両制御を行う車両制御装置に関するものである。
【背景技術】
【0002】
従来、特許文献1、2において、Gセンサの0点補正を実施している装置が開示されている。具体的には、特許文献1に記載の装置では、坂路において路面勾配により車両が下方に移動するという車両ずり下がり状態における加速度変化量と出力軸トルクとの関係と、予め記憶しておいた路面勾配ごとの加速度推定値を記したマップとに基づいて、路面の勾配を推定し、Gセンサの0点補正を行っている。また、特許文献2に記載の装置では、所定距離走行ごとのGセンサの出力に基づいて演算した加速度の平均値と現在のGセンサの出力値を比較することで、Gセンサの0点補正を行っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−31980号公報
【特許文献2】特開2008−145152号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の装置では、路面勾配ごとの加速度推定値を記したマップが必要になる。また、出力軸トルクとずり下がり時の加速度変化量との関係は、車両の積載重量の影響を直接受けて大きく変化するため、積載重量に応じて正確な0点補正を行うことができなくなることがある。さらに、車両の停止後の発進時に進行方向と逆方向への車両ずり下がり状態でしか0点補正を行うことができない。
【0005】
また、特許文献2に記載の装置では、最初に所定距離走行したときに得た初回のGセンサの出力の0点が正しいことを前提として、その後に0点がシフトしたときの0点補正を行うことになるが、初回の0点が必ずしも正しいとは限らない。
【0006】
本発明は上記点に鑑みて、路面勾配ごとの加速度推定値を記したマップを必要とせず、かつ、車両への積載重量の影響を排除あるいは低減させ、的確にGセンサの0点補正を行うことができる車両制御装置を提供することを第1の目的とする。さらに、車両の進行方向と逆方向の車両ずり下がり状態以外のときにもGセンサの0点補正が行えるようにすることを第2の目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、請求項1に記載の発明では、車両が走行中であることを検出する走行検出手段(11、110、205)と、車両に制動力を付与するための制動手段による制動状態を検出する制動状態検出手段(13、130、230)と、車両に付与される駆動力の状態を検出する駆動状態検出手段(14、120、225)と、車両に駆動力も制動力も発生しない状態である自由降下状態を判定する自由降下状態判定手段(110〜130、205、225、230)とを備え、自由降下状態判定手段(110〜130、205、225、230)は、走行検出手段(11、110、205)にて前記車両が走行中であることが検出され、制動状態検出手段(13、130、230)が車両に制動力が付与されていない状態を検出し、かつ、駆動状態検出手段(14、120、225)が車両の加速方向にも減速方向にも駆動力が発生しない無駆動力状態を検出した場合を自由降下状態と判定し、加速度補正手段(14、150、245)は、自由降下状態判定手段(110〜130、205、225、230)が自由降下状態と判定した際に加速度検出手段(12、15、100、200、235)が検出した加速度より求めた0点からのオフセットに基づいて、直接加速度検出手段(12、100、200、235)の検出した加速度を補正することを特徴としている。
【0008】
このように、制動力が発生させられている制動状態ではなく、かつ、駆動力が発生させられている駆動状態でもない自由降下状態の際に加速度検出手段(12、15、100、200、235)が検出した加速度より0点からのオフセットを求め、このオフセットに基づいてGセンサ(3)の0点補正を行う。これにより、車両への積載重量の影響を受けることなく、Gセンサ(3)の0点補正を行うことが可能となる。また、Gセンサ(3)の0点補正を行うのに、路面勾配ごとの加速度推定値を記したマップを必要とすることもない。
【0009】
さらに、自由降下状態は、車両の進行方向と逆方向に車両が移動させられるような車両ずり下がり状態だけでなく、重量の影響で車両の進行方向に車両が移動させられうような場合もある。このような場合でも、同様に0点補正を行えるため、車両の進行方向と逆方向の車両ずり下がり状態以外のときにもGセンサ(3)の0点補正を行うことが可能となる。
【0010】
請求項2に記載の発明では、加速度補正手段(14、150)は、自由降下状態判定手段(110〜130)が自由降下状態と判定した際に加速度検出手段(12、100)が検出した加速度を0点からのオフセットとすることを特徴としている。
【0011】
自由降下状態の際には、車両の進行または後退方向に作用する力は重力のみとなり、重力に従って車両に発生する進行または後退方向の加速度は車両への積載重量などの影響を受けることはない。重力に従って自由落下中の物体の内部が無重力状態となるのと同様に、自由降下状態の際にはGセンサ(3)の検出信号から求められる加速度は0になるはずであり、0でなければそれがオフセットと考えられる。したがって、自由降下状態の際にGセンサ(3)の検出信号から求められる加速度をオフセットとしてGセンサ(3)の0点補正を行うことができる。
【0012】
請求項3に記載の発明では、加速度補正手段(14、245)は、自由降下状態判定手段(205、225、230)が自由降下状態と判定した際に間接加速度検出手段(15、235)が検出した加速度と、自由降下状態と判定される前の車両静止時に直接加速度検出手段(12、200)の検出した加速度とに基づいて0点からのオフセットを求めることことを特徴としている。
【0013】
このように、車両停止中の状態から走行を開始した際に、それが自由降下状態による走行であれば、自由降下状態と判定される前の車両静止時に直接加速度検出手段(12、200)の検出した加速度と接加速度検出手段(15、235)が検出した加速度との差を演算することでオフセットを求めることができる。
【0014】
請求項4に記載の発明では、駆動状態検出手段(14、120、225)は、エンジンの停止、クラッチの非接続、ギアがニュートラル位置のうちの少なくとも1つが検出されたことをもって、無駆動力状態と判定することを特徴としている。
【0015】
このように、エンジンの停止、クラッチの非接続、ギアがニュートラル位置のうちの少なくとも1つが検出されると、無駆動力状態であると判定することができる。
【0016】
請求項5に記載の発明では、加速度補正手段は、車両速度検出手段が検出した車両速度が所定の閾速度よりも低い低速度域の際にのみ、直接加速度検出手段(12、100、200)の検出した加速度を補正することを特徴としている。
【0017】
直接加速度検出手段(12、100、200)の検出した加速度は、走行抵抗などを阻害要因として、本来の自由降下状態の際に想定される値からずれる。走行抵抗については、車両速度が高いほど大きくなることから、Gセンサ(3)の0点補正自体を車両速度が所定の閾速度よりも低い低速度域の際にのみ行うようにすれば、走行抵抗などによる影響を少なくでき、的確な0点補正を行うことが可能となる。
【0018】
請求項6に記載の発明では、加速度補正手段は、車両速度検出手段が検出した車両速度に応じた走行抵抗に基づいて、自由降下状態判定手段(110〜130、205、225、230)が自由降下状態と判定した際に加速度検出手段(12、15、100、200、235)が検出した加速度より求めた0点からのオフセットを補正することを特徴としている。
【0019】
このように、車両速度検出手段が検出した車両速度に応じた走行抵抗に基づいて、Gセンサ(3)の検出信号から演算した加速度を補正することで、走行抵抗を加味したより正確な加速度に補正することができる。
【0020】
請求項7に記載の発明では、加速度補正手段は、間接加速度検出手段が検出した加速度に応じた回転慣性抗力に基づいて、自由降下状態判定手段(110〜130、205、225、230)が自由降下状態と判定した際に加速度検出手段(12、15、100、200、235)が検出した加速度より求めた0点からのオフセットを補正することを特徴としている。
【0021】
このように、間接加速度検出手段が検出した加速度に応じた回転慣性抗力に基づいて、Gセンサ(3)の検出信号から演算した加速度を補正することで、回転慣性抵抗力を加味したより正確な加速度に補正することができる。
【0022】
請求項8に記載の発明では、加速度補正手段は、車輪の回転数から算出した走行距離と走行経路から算出した走行距離との差と車輪のタイヤ空気圧および車両重量の少なくとも1つの情報に基づいて、直接加速度検出手段(12、100、200)の検出した加速度を補正することを特徴としている。
【0023】
このように、車輪の回転数から算出した走行距離と走行経路から算出した走行距離との差と車輪のタイヤ空気圧および車両重量の少なくとも1つの情報に基づいて、Gセンサ(3)の検出信号から演算した加速度を補正することで、タイヤ半径の変化を加味したより正確な加速度に補正することができる。
【0024】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【図面の簡単な説明】
【0025】
【図1】本発明の第1実施形態にかかるGセンサの0点補正装置を適用した車両制御システムのブロック構成を示した図である。
【図2】Gセンサ0点補正処理の詳細を示したフローチャートである。
【図3】アイドルストップ制御が実行される車両において、Gセンサ値0点補正を行った場合のタイミングチャートである。
【図4】本発明の第2実施形態にかかるGセンサの0点補正装置を適用した車両制御システムのブロック構成を示した図である。
【図5】Gセンサ0点補正処理の詳細を示したフローチャートである。
【図6】アイドルストップ制御が実行される車両において、Gセンサ値0点補正を行った場合のタイミングチャートである。
【図7】(a)、(b)は、車両速度と走行抵抗Fregの関係および走行抵抗Fregと減速度Gregの関係を示した図である。
【図8】(a)、(b)は、車両加速度と慣性抗力Fineの関係および慣性抗力Fineと減速度Gineの関係を示した図である。
【図9】(a)、(b)は、タイヤ空気圧に対するタイヤ半径や荷重に対するタイヤ半径の関係を示した図である。
【発明を実施するための形態】
【0026】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
【0027】
(第1実施形態)
本発明の第1実施形態について説明する。本実施形態では、Gセンサで検出される加速度に基づく車両制御が実行される車両制御システムに対してGセンサの0点補正装置を適用した場合について説明する。
【0028】
図1は、本実施形態にかかるGセンサの0点補正装置を適用した車両制御システムのブロック構成を示した図である。この図を参照して車両制御システムの構成について説明する。
【0029】
図1に示すように、車両制御システムは、ブレーキECU(電子制御装置)1によってGセンサの0点補正を行い、このGセンサの0点補正を行った後のGセンサ値に基づいて車両制御、例えば坂路保持制御において路面勾配に応じた制動力付与を行うなどの制御を実行する。なお、ブレーキECU1では、アンチスキッド制御などの一般的なブレーキ制御についても実行しているが、ここでは本発明の特徴にかかわるGセンサの0点補正やそれに関わる車両制御についてのみ説明する。
【0030】
ブレーキECU1には、車輪速度センサ2やGセンサ3の検出信号が入力されると共に、ブレーキスイッチ(BRK)4のスイッチ信号およびエンジンECU5からの情報が入力され、これらの入力に基づいて車両ずり下がり状態判定を行っている。
【0031】
具体的には、ブレーキECU1は、車両走行検出部11、Gセンサ値演算部12、ブレーキ制御部13およびGセンサ0点補正部14を有した構成とされ、Gセンサ0点補正部14が各部11〜13から得た情報に基づいてGセンサ3の0点補正を実行する。なお、本実施形態では、このブレーキECU1のうちGセンサ0点補正の実行に用いられる部分、つまり上記各部11〜14がGセンサ3の0点補正装置を構成するものである。ここではブレーキECU1を例に挙げたが、他のECUなどでGセンサ3の0点補正を実行しても構わない。
【0032】
車両走行検出部11は、車輪速度センサ2から入力される検出信号に基づいて車輪速度を演算し、車両が走行中であることを検出する。本実施形態では、後述するように車両が自由降下状態に至っている際にGセンサ3の0点補正を行う。自由降下状態とは、車両に制駆動力のいずれも発生しておらず、路面勾配に応じて、重力に従って加速している状態を意味している。自由降下状態の際には、車両が駆動力や制動力の影響を受けることなく路面勾配に応じて重力に従って加速する。このため、自由降下状態の際にはGセンサ3の出力は、重力の影響を受けなくなり、Gセンサ3の出力が0でなければ、それが0点からの誤差、つまりオフセットとなる。
【0033】
したがって、自由降下状態の際のGセンサ3の出力を得ることで0点からのオフセットを求めることができるが、制駆動力が発生しない場合であっても、路面の凹凸などで車両が停止している場合には自由降下状態とは言えない。このような状態を排除すべく、車両走行検出部11によって車両が走行中であることを検出している。この情報がGセンサ0点補正部14に入力される。
【0034】
Gセンサ値演算部12は、Gセンサ3から入力される検出信号に基づいてGセンサ値を算出する。このとき得られるGセンサ値は、0点補正前の生値であるため、Gセンサ値にオフセットが有る場合には、そのオフセットが含まれた値となっている。このGセンサ値もGセンサ0点補正部14に入力される。
【0035】
ブレーキ制御部13は、ABS制御等の各種制御を実行する部分であるが、ブレーキスイッチ4から入力されるスイッチ信号に基づいて、車両にブレーキペダル踏み込みに基づく制動力を発生させている最中であるか否かという情報を扱っている。このため、ブレーキ制御部13で取り扱っているブレーキスイッチ4のスイッチ信号がGセンサ0点補正部14に入力されるようにしている。
【0036】
Gセンサ0点補正部14は、車両走行検出部11やGセンサ値演算部12およびブレーキ制御部13から入力される各種情報に加え、エンジンECU5から伝えられるエンジンの稼動状態に関する情報に基づいてGセンサ3の0点補正を行うことで、オフセットが含まれない正確なGセンサ値を演算する。このGセンサ0点補正部14にて0点補正が為された正確なGセンサ値が、各種車両制御を実行するECU等へ伝えられ、車両制御に用いられる。Gセンサ0点補正部14による具体的な0点補正の方法については後で詳述する。
【0037】
なお、エンジンECU5は、アクセルペダルの操作量に応じてスロットルバルブの開度を調整することで所望のエンジンパワーを得るなどの一般的なエンジン制御を実行しており、エンジンの稼動状態について把握している。このエンジンの稼動状態を示す情報がエンジンECU5から車両制御要求部13に入力されるようにしている。ここではエンジンECU5からGセンサ0点補正部14に対してエンジンの稼動状態に関する情報が伝えられるようにしているが、他のECUでエンジンの稼動状態を把握している場合には、そのECUからエンジンの稼動状態がGセンサ0点補正部14に入力されるようにしても良い。例えば、燃料の消費量低減などを目的として、所定条件を満たした場合にアイドリングストップを行うエンジンのアイドルストップ制御を行うアイドルストップECUでは、エンジンの停止・再始動に関する情報を扱っている。このため、アイドルストップECUからエンジンの稼動状態に関する情報を得るようにしても良い。
【0038】
このように、本実施形態にかかるGセンサ0点補正装置が適用された車両制御システムが構成されている。続いて、このように構成された車両制御システムに備えられたブレーキECU1が実行するGセンサ0点補正処理について説明する。
【0039】
図2は、Gセンサ0点補正処理の詳細を示したフローチャートである。この図に示すGセンサ0点補正処理は、イグニッションスイッチがオンされている際に所定の制御周期毎に実行される。
【0040】
まず、ステップ100では、入力処理を行う。この処理は、ブレーキECU1における各部11〜14にて実行される。具体的には、各部11〜14は、車輪速度センサ2やGセンサ3から検出信号を入力すると共に、エンジンECU5からのエンジンの稼動状態に関する情報やブレーキスイッチ4からのスイッチ信号を入力する。また、車両走行検出部11では、入力した車輪速度センサ2の検出信号から車輪速度Vwを演算すると共に演算した車輪速度Vwから推定車体速度Vを演算する。この推定車体速度Vにより車両が走行中であるか否かを検出することができる。さらに、Gセンサ値演算部12では、入力したGセンサ3の検出信号に基づいてGセンサ値を演算する。
【0041】
次に、ステップ110〜140において、Gセンサ0点補正の条件を満たしているか否かを判定し、満たしている場合にステップ150に進んでGセンサ0点補正を行う。これらの処理は、車両走行検出部11やGセンサ値演算部12やブレーキ制御部13からの情報およびエンジンECU4からのエンジンの稼動状態に関する情報に基づいて、Gセンサ0点補正部13が実行する。
【0042】
具体的には、ステップ110〜130の各処理により、自由降下状態であることを判定する。ステップ110では、車両走行中であるか否かを判定する。この判定は、車両走行検出部11での検出結果に基づいて行われる。上述したように、自由降下状態の際のGセンサ3の出力を得ることで0点からのオフセットを求めることができるが、制駆動力が発生しない場合であっても、路面の凹凸などで車両が停止している場合には自由降下状態とは言えない。したがって、ステップ110で車両走行中という条件を設定し、路面の凹凸などで車両が停止している場合を排除している。
【0043】
また、ステップ120では、エンジン停止中であるかを判定する。この判定は、エンジンECU4から入力されるエンジンの稼動状態に関する情報に基づいて行われる。ステップ130では、ブレーキスイッチ4がオンしているか否かを判定する。この判定は、ブレーキ制御部13で扱われているブレーキスイッチ4のスイッチ信号に基づいて為される。
【0044】
自由降下状態は、車両に制駆動力のいずれも発生しておらず、路面勾配に応じて重力に従って加速している状態であり、エンジンが停止中で、かつ、ブレーキスイッチ4がオフの状態であれば、制動力と駆動力の双方が発生していない状態である。このため、ステップ110で路面の凹凸などで車両が停止しているような場合を排除しつつ、ステップ120、130の各判定を行うことで、自由降下状態であることを判定することができる。
【0045】
このようにして、ステップ110〜130の各条件を満たして自由降下状態であることが判定されると、ステップ140でGセンサ値が0ではないかが判定される。この判定は、Gセンサ値演算部12の演算結果に基づいて行われる。ここで、Gセンサ値が0でなければ、Gセンサ値にオフセットが含まれていることを意味しているため、Gセンサ値の0点補正を行う必要がある。
【0046】
したがって、ステップ140でも肯定判定されれば、Gセンサ値の0点補正を行う必要性があることから、ステップ150に進んでGセンサ0点補正を行う。すなわち、自由降下状態であれば本来はGセンサ値が0であるはずであり、Gセンサ値が0でなければ、その値がオフセットに相当している。このため、Gセンサ値のオフセットとして、そのとき発生しているオフセットを記憶すると共に、Gセンサ3の検出信号に基づいて演算される0点補正前のGセンサ値に対して、オフセット分を除くことで0点補正後のGセンサ値を求める。これにより、Gセンサ値0点補正処理が完了する。
【0047】
この後は、Gセンサ3の検出信号に基づいて演算される0点補正前のGセンサ値に対して、オフセット分を除くことで0点補正が行われ、この0点補正後のGセンサ値が車両制御に用いるGセンサ値として車両制御を実行する各種ECUに伝えられる。これにより、正確な0点補正が行われたGセンサ値に基づいて、適切な車両制御を実行することができる。
【0048】
図3は、アイドルストップ制御が実行される車両において、本実施形態によるGセンサ値0点補正を行った場合のタイミングチャートである。この図に示されるように、アイドルストップ制御では、例えば、ブレーキ踏込みがなされている状況で、かつ、車両速度が所定の速度閾値以下になると、エンジン停止を行うことにより燃料消費量の低減などが図られる。このため、時点T1において、ブレーキペダル踏み込みが為され、かつ、車両速度所定の速度閾値以下になると、アイドルストップECUからエンジン停止の要求が出されることでエンジンが停止させられる。これにより、徐々にエンジン回転数が低下し、時点T2でエンジン回転数が0になってエンジン停止の状態となる。
【0049】
この状態において、ブレーキペダルの踏み込みが解除されていき、時点T3でブレーキスイッチがオフになると、路面勾配に応じて車両ずり下がり状態となり、自由降下状態となる。このとき、Gセンサ値が正確であれば0になるはずであり、Gセンサ値が0でなければ、それが0点からの誤差(オフセット)である。したがって、このときのGセンサ値をオフセットとして記憶し、これを今後のGセンサ値の演算の際に補正に用いれば、オフセットを除いた正確なGセンサ値を演算することが可能となる。
【0050】
以上説明したように、本実施形態では、制動力が発生させられている制動状態ではなく、かつ、駆動力が発生させられている駆動状態でもない自由降下状態を判定し、自由降下状態の際のGセンサ値をオフセットとしてGセンサ3の0点補正を行うようにしている。自由降下状態の際には、車両への積載重量などの影響を受けることなくGセンサ3の検出信号から求められるGセンサ値は0になるはずであり、0でなければそれがオフセットと考えられる。したがって、自由降下状態の際にGセンサ値をオフセットとしてGセンサ3の0点補正を行うことで、車両への積載重量の影響を受けることなく、Gセンサ3の0点補正を行うことが可能となる。また、Gセンサ3の0点補正を行うのに、路面勾配ごとの加速度推定値を記したマップを必要とすることもない。
【0051】
さらに、自由降下状態は、車両の進行方向と逆方向に車両が移動させられるような車両ずり下がり状態だけでなく、重量の影響で車両の進行方向に車両が移動させられうような場合もある。このような場合でも、同様に0点補正を行えるため、車両の進行方向と逆方向の車両ずり下がり状態以外のときにもGセンサの0点補正を行うことが可能となる。
【0052】
(第2実施形態)
本発明の第2実施形態について説明する。本実施形態は、第1実施形態に対してGセンサ値0点補正の方法を変更したものであり、その他に関しては第1実施形態と同様であるため、第1実施形態と異なる部分についてのみ説明する。
【0053】
図4は、本実施形態にかかるGセンサ3の0点補正装置を適用した車両制御システムのブロック構成を示した図である。この図に示すように、本実施形態の車両制御システムに備えられたブレーキECU1は、車体加速度演算部15が備えられており、車輪速度センサ2の検出信号に基づいて車体加速度(車両加速度)の演算を行っている。
【0054】
具体的には、車体加速度演算部15は、車輪速度センサ2から入力される検出信号に基づいて車輪加速度を演算する。車輪速度センサ2からは、車輪の回転に応じて出力されるパルス信号が検出信号としてブレーキECU1に入力されるため、車体加速度演算部15は、このパルス信号のパルス数に基づいて各車輪の車輪速度Vwを演算すると共に、その車輪速度Vwから推定車体速度Vを演算し、さらに推定車体速度Vの変化量(微分値)を求めることで車体加速度dVを演算する。
【0055】
そして、本実施形態のGセンサ0点補正部14は、Gセンサ値演算部12で演算されたGセンサ値と車体加速度演算部15で演算された車体加速度dVとに基づいて、Gセンサ3の0点補正を行う。
【0056】
例えば、坂路において車両が停止している状態から自由降下状態に至った場合、車両停止中にGセンサ3の検出信号から演算したGセンサ値と、自由降下状態に至った時の車体加速度dVとが一致するはずである。これが一致しない場合には、Gセンサ3の検出信号から演算したGセンサ値にオフセットを含まれているのであり、そのGセンサ値と自由降下状態に至った時の車体加速度dVとの差がオフセットとなる。これに基づいて、本実施形態のGセンサ値0点補正を行っている。
【0057】
続いて、本実施形態のブレーキECU1が実行するGセンサ0点補正処理について説明する。図5は、本実施形態のGセンサ0点補正処理の詳細を示したフローチャートである。この図に示すGセンサ0点補正処理は、イグニッションスイッチがオンされている際に所定の制御周期毎に実行される。
【0058】
まず、ステップ200では、第1実施形態で説明した図2のステップ100と同様の処理を行う。そして、ステップ205に進み、車両停止中であるか否かを判定する。この判定は、車両走行検出部11での検出結果に基づいて行われる。そして、肯定判定されればステップ210に進み、Gセンサ値を記憶しておく。
【0059】
続いて、車両停止中の状態から車両が動いてステップ205で否定判定されると、ステップ215に進み、走行開始時間を測定する。走行開始時間とは、車両停止状態から車両走行中に移行したときにおける車両走行中に移行してからの経過時間を意味している。すなわち、車両停止状態から車両走行中に移行した場合、移行して直ぐのときにはGセンサ値が十分に安定しておらず、まだ重力の影響による成分を含んだGセンサ値となっている。このため、走行開始時間を測定したのち、ステップ220に進み、走行開始時間が規定時間内、すなわちGセンサ値が十分に安定すると想定される時間以上、かつ、その時間が経過してから直ぐと考えられる時間の範囲内であるか否かを判定する。
【0060】
そして、ステップ220で肯定判定されると、ステップ225、230において、第1実施形態で説明した図2のステップ120、130と同様の処理を行うことで、車両が自由降下状態であるか否かを判定する。これらステップ225、230の両判定によって車両が自由降下状態であると判定されると、ステップ240に進み、車体加速度演算部15にて、車輪速度Vwを用いて、推定車体速度Vを演算すると共にそれを微分することで車体加速度dVを演算する。
【0061】
この後、ステップ240に進み、車体加速度dVとステップ210で記憶しておいたGセンサ値とが乖離しているか否かを判定する。例えば、車体加速度dVとステップ210で記憶しておいたGセンサ値との差が所定の閾値以上であれば、これらが乖離していると判定している。そして、ステップ240で肯定判定されれば、ステップ245に進んでGセンサ値0点補正を行う。
【0062】
具体的には、Gセンサ3にオフセットがなければ、車体加速度dVとステップ210で記憶しておいたGセンサ値とは一致する。これが一致しないのであれば、Gセンサ3にオフセットが含まれていると言える。このため、車体加速度dVとステップ210で記憶しておいたGセンサ値との差をオフセットとして記憶すると共に、Gセンサ3の検出信号に基づいて演算される0点補正前のGセンサ値に対して、オフセット分を除くことで0点補正後のGセンサ値を求める。これにより、Gセンサ値0点補正処理が完了する。
【0063】
この後は、Gセンサ3の検出信号に基づいて演算される0点補正前のGセンサ値に対して、オフセット分を除くことで0点補正が行われ、この0点補正後のGセンサ値が車両制御に用いるGセンサ値として車両制御を実行する各種ECUに伝えられる。これにより、正確な0点補正が行われたGセンサ値に基づいて、適切な車両制御を実行することができる。
【0064】
図6は、アイドルストップ制御が実行される車両において、本実施形態によるGセンサ値0点補正を行った場合のタイミングチャートである。この図に示されるように、アイドルストップ制御によりエンジン停止とされ、車両停止したのち、車両発進の際にブレーキペダルを離して時点T1において制動力がなくなって自由降下状態になったとする。これ以前には、Gセンサ3は路面勾配に応じた重力の影響を受けた状態となっているため、Gセンサ3の検出信号から演算したGセンサ値は路面勾配に応じた重力に対応する値となっている。そして、時点T1において自由降下状態になると、それから車両が走行を開始し、Gセンサ値は徐々に低下し、ある程度時間が経過すると安定した値となる。このときの値は、Gセンサ3にオフセットがなければ0となるが、オフセットがあれば0にならない。
【0065】
一方、自由降下状態になったときには、車輪が回転して車両が走行を開始するため、車輪速度が発生する。そして、このときの車体加速度dVは、車両が路面勾配に応じた重力によって走行させられた状態であることから、その直前の車両停止時のGセンサ3の検出信号から演算したGセンサ値と対応した値になり、車体加速度dVとGセンサ値との差がGセンサ3のオフセットとなる。したがって、走行開始時間が規定時間内の際に、車体加速度dVとGセンサ値との差を演算し、これをオフセットとして記憶すると共に、これを今後のGセンサ値の演算の際に補正に用いれば、オフセットを除いた正確なGセンサ値を演算することが可能となる。
【0066】
以上説明したように、車両停止中の状態から走行を開始した際に、それが自由降下状態による走行であれば、車体加速度dVとGセンサ値との差を演算することでオフセットを求め、Gセンサ3の0点補正を行うようにしている。このようにしても、Gセンサ3の0点補正を行うことができる。この場合にも、自由降下状態を利用してオフセットを求めているため、車両への積載重量などの影響を受けることなくGセンサ3の0点補正を行うことが可能となる。したがって、第1実施形態と同様の効果を得ることができる。
【0067】
(他の実施形態)
上記実施形態では、自由降下状態の一例として、アイドルストップ制御が実行される車両のずり下がり状態を例に挙げたが、自由降下状態となるどのような状況においても、上記のようにGセンサ3の0点補正を行うことができる。特に、走行中でもエンジン停止されるアイドルストップ制御が実行される車両やハイブリッド車両などにおいては、Gセンサ3の0点補正を行う頻度を多くすることができ、より正確なGセンサ値を得ることが可能となる。
【0068】
また、無駆動力状態となるような状況としてエンジン停止を例に挙げたが、例えば、クラッチが非接続のときやギアがニュートラル(N)位置とされている場合などにも無駆動力状態となるため、エンジン停止以外でもGセンサ3の0点補正を行うことができる。
【0069】
さらに、上記各実施形態では、エンジン停止かつブレーキスイッチ4がオフの際を制駆動力のいずれも発生しておらず、路面勾配に応じて重力に従って加速している自由降下状態としている。しかしながら、実際には、エンジン停止かつブレーキスイッチ4がオフの際にも、制駆動力が全く0になるとは限らない等、様々な阻害要因が発生する。例えば、阻害要因として、(1)車両が動くことによる走行抵抗、すなわち摺動部の摩擦や空気抵抗が発生すること、(2)タイヤなどが回転しながら走行するため、加速時に回転する部分の回転慣性の影響を受けること、(3)タイヤ径が変化すると車輪速度センサ2の検出信号を用いて演算した車体加速度dVに誤差が発生することが挙げられる。これらの影響により、自由降下状態において、車輪速度センサ2の検出信号に基づいて演算した車体加速度dVとGセンサ3の検出信号から得られるGセンサ値とが、本来の自由降下状態の際に想定される値からずれる。したがって、このような阻害要因を考慮に入れた補正を行うようにすると好ましい。以下、この補正方法について説明する。
【0070】
(1)車両が動くことによる走行抵抗を加味した補正方法
車両速度から走行抵抗Fregを算出したのち、走行抵抗Fregから走行抵抗分の減速度Gregを算出する。車両速度と走行抵抗Fregの関係および走行抵抗Fregと減速度Gregの関係は、それぞれ、図7(a)、(b)に示すマップのような関係で表される。このため、予めこれらの関係を示すマップを用意しておき、車輪速度センサ2の検出信号に基づいて演算した推定車体速度Vを車両速度として、そこから走行抵抗Fregを算出し、さらに減速度Gregを算出するようにすればよい。例えば、走行抵抗Fregについては、事前に各速度ごとに水平路面で定常走行を行い、そのときの駆動力から算出することができる。さらに、走行抵抗Fregについては、車重を減速度Gregで割ることで算出することができる。
【0071】
そして、このようにして減速度Gregを算出したら、上記各実施形態のようにして求めたオフセットに対してさらに減速度Gregを足すことで0点からのオフセットを補正し、Gセンサ3の検出信号から演算したGセンサ値のオフセットとして除去することで、走行抵抗を加味したより正確なGセンサ値に補正することができる。
【0072】
また、走行抵抗については、車両速度が高いほど大きくなることから、Gセンサ3の0点補正自体を車両速度が所定の閾速度よりも低い低速度域の際にのみ行うようにすれば、ここで説明したような走行抵抗を加味した補正を行う必要もない。さらに、走行抵抗については、路面状態に応じて予測できないこともあり得る。このため、悪路のように、走行抵抗に影響を及ぼすような路面状態では、ここで説明したような補正を行っても正確に走行抵抗を加味した補正を行うことができないことから、悪路の場合にはGセンサ3の0点補正を行わないようにしても良い。
【0073】
(2)回転慣性抗力の影響を加味した補正方法
車両加速度から慣性抗力Fineを算出したのち、慣性抗力Fineから回転慣性分の減速度Gineを算出することができる。車両加速度と慣性抗力Fineの関係および慣性抗力Fineと減速度Gineの関係は、それぞれ、図8(a)、(b)に示すマップのような関係で表される。このため、予めこれらの関係を示すマップを用意しておき、車輪速度センサ2の検出信号に基づいて演算した車体加速度dVを車両加速度として、そこから慣性抗力Fineを算出し、さらに減速度Gineを算出するようにすればよい。例えば、車両加速度と慣性抗力Fineの関係については、事前にテストベンチでホイールにセットしたタイヤを回転させ、一定の抵抗を与えたときの回転速度変化からタイヤの回転慣性力が求まるため、これを基準に車両の装着数(4輪車なら4本)を掛けて、回転加速度を車両加速度に換算することで事前に算出できる。また、慣性抵抗Fineに対する減速度Gineの関係については、車重を慣性抵抗Fineで割ることによって算出することができる。
【0074】
そして、このようにして減速度Gineを算出したら、上記各実施形態のようにして求めたオフセットに対してさらに減速度Gineを足すことで0点からのオフセットを補正し、Gセンサ3の検出信号から演算したGセンサ値のオフセットとして除去することで、回転慣性の影響を加味したより正確なGセンサ値に補正することができる。
【0075】
(3)タイヤ半径の変化を加味した補正方法
タイヤ半径は、タイヤ空気圧に応じて変化する。このため、タイヤ空気圧検出装置を用いてタイヤ空気圧を検出し、タイヤ空気圧に対応するタイヤ半径を算出することで、算出したタイヤ半径における基準タイヤ半径に対する比から、加速度補正値Kpを算出することができる。また、タイヤ半径は荷重(車両重量)に応じても変化する。このため、ハイトセンサ等を用いて車輪に加わる荷重を測定し、測定した荷重に対応するタイヤ半径における基準荷重時のタイヤ半径の比から、加速度補正値Kwを算出することができる。例えば、タイヤ空気圧に対するタイヤ半径や荷重に対するタイヤ半径の関係は、それぞれ、図9(a)、(b)に示すマップのような関係で表される。このため、予めこれらの関係を示すマップを用意しておき、検出したタイヤ空気圧や荷重と対応するタイヤ半径を算出し、算出したタイヤ半径/基準タイヤ半径より、加速度補正値Kp、Kwを演算できる。
【0076】
また、走行経路から求められる走行距離と、車輪速度センサの検出信号、つまりタイヤ回転数から求められる走行距離との差は、タイヤ半径の変化を表している。このため、次式のようにして、走行距離から加速度補正値Kdを演算することができる。なお、次式において、ナビゲーション装置で算出した走行距離は地図データに基づいて走行経路から算出したものである。
【0077】
(数1)
Kd=1.0+((ナビゲーション装置で算出した走行距離−タイヤ回転数から演算した走行距離)/ナビゲーション装置で算出した走行距離)
そして、このように加速度補正値Kp、Kw、Kdを算出したら、Gセンサ3の検出信号から演算したGセンサ値よりオフセット分を除去したのち、さらに加速度補正値Kp,Kw、Kdのいずれか1つを係数として掛け合わせることにより、タイヤ半径の変化を加味した補正後のGセンサ値とすることができる。
【0078】
なお、ここでは加速度補正値Kp、Kw、Kdのいずれか1つを補正係数として用いるようにしているが、複数を用いることもできる。その場合、各加速度補正値Kp、Kw、Kdの平均値を用いたりすれば良い。
【0079】
なお、図1中のブレーキECU1の各部11〜15や図2および図5中に示したステップは、各種処理を実行する手段に対応するものである。具体的には、ブレーキECU1のうち車輪加速度演算部11やステップ110、205の処理を行っている部分が走行検出手段、Gセンサ値演算部12や車体加速度演算部15およびステップ100、200、235の処理を行っている部分が加速度検出手段や直接加速度検出手段および間接加速度検出手段、ブレーキ制御部13やステップ130、230の処理を行っている部分が制動状態検出手段、Gセンサ0点補正部14やステップ150、245の処理を行っている部分が加速度補正手段、ステップ120、225の処理を行っている部分が駆動状態検出手段、ステップ110〜130、205、225、230の処理を実行する部分が自由降下状態判定手段に相当する。
【符号の説明】
【0080】
1 ブレーキECU
2 車輪速度センサ
3 Gセンサ
4 ブレーキスイッチ
5 エンジンECU
11 車両走行検出部
12 Gセンサ値演算部
13 ブレーキ制御部
14 Gセンサ0点補正部
15 車体加速度演算部
【特許請求の範囲】
【請求項1】
車両に加わる加速度を検出する加速度検出手段(12、15、100、200、235)と、
前記加速度検出手段(12、15、100、200、235)の検出した加速度を補正する加速度補正手段(14、150、245)と、を有し、
前記加速度補正手段(14、150、245)で補正された加速度を用いて車両制御を実行する車両制御装置であって、
前記車両が走行中であることを検出する走行検出手段(11、110、205)と、
前記車両に制動力を付与するための制動手段による制動状態を検出する制動状態検出手段(13、130、230)と、
前記車両に付与される駆動力の状態を検出する駆動状態検出手段(14、120、225)と、
前記車両に駆動力も制動力も発生しない状態である自由降下状態を判定する自由降下状態判定手段(110〜130、205、225、230)と、を備え、
前記加速度検出手段(12、15、100、200、235)は、前記車両に加わる重力加速度を含む加速度を加速度センサ(3)の検出信号に基づいて直接検出する直接加速度検出手段(12、100、200)を有し、
前記自由降下状態判定手段(110〜130、205、225、230)は、前記走行検出手段(11、110、205)にて前記車両が走行中であることが検出され、前記制動状態検出手段(13、130、230)が前記車両に制動力が付与されていない状態を検出し、かつ、前記駆動状態検出手段(14、120、225)が前記車両の加速方向にも減速方向にも駆動力が発生しない無駆動力状態を検出した場合を前記自由降下状態と判定し、
前記加速度補正手段(14、150、245)は、前記自由降下状態判定手段(110〜130、205、225、230)が前記自由降下状態と判定した際に前記加速度検出手段(12、15、100、200、235)が検出した加速度より求めた0点からのオフセットに基づいて、前記直接加速度検出手段(12、100、200)の検出した加速度を補正することを特徴とする車両制御装置。
【請求項2】
前記加速度補正手段(14、150)は、前記自由降下状態判定手段(110〜130)が前記自由降下状態と判定した際に前記加速度検出手段(12、100)が検出した加速度を0点からのオフセットとすることを特徴とする請求項1に記載の車両制御装置。
【請求項3】
前記加速度検出手段(12、15、200、235)は、前記車両の速度である車両速度を検出すると共に、該車両速度に基づいて前記車両の加速度を間接的に検出する間接加速度検出手段(15、235)を有し、
前記加速度補正手段(14、245)は、前記自由降下状態判定手段(205、225、230)が前記自由降下状態と判定した際に前記間接加速度検出手段(15、235)が検出した加速度と、前記自由降下状態と判定される前の車両静止時に前記直接加速度検出手段(12、200)の検出した加速度とに基づいて0点からのオフセットを求めることことを特徴とする請求項1に記載の車両制御装置。
【請求項4】
前記駆動状態検出手段(14、120、225)は、エンジンの停止、クラッチの非接続、ギアがニュートラル位置のうちの少なくとも1つが検出されたことをもって、前記無駆動力状態と判定することを特徴とする請求項1ないし3のいずれか1つに記載の車両ずり下がり状態判定装置。
【請求項5】
前記車両の速度である車両速度を検出する車両速度検出手段を有し、
前記加速度補正手段は、前記車両速度検出手段が検出した前記車両速度が所定の閾速度よりも低い低速度域の際にのみ、前記直接加速度検出手段(12、100、200)の検出した加速度を補正することを特徴とする請求項1ないし4のいずれか1つに記載の車両制御装置。
【請求項6】
前記車両の速度である車両速度を検出する車両速度検出手段を有し、
前記加速度補正手段は、前記車両速度検出手段が検出した前記車両速度に応じた走行抵抗に基づいて、前記自由降下状態判定手段(110〜130、205、225、230)が前記自由降下状態と判定した際に前記加速度検出手段(12、15、100、200、235)が検出した加速度より求めた0点からのオフセットを補正することを特徴とする請求項1ないし4のいずれか1つに記載の車両制御装置。
【請求項7】
前記加速度検出手段は、前記車両の速度である車両速度を検出すると共に、該車両速度に基づいて前記車両の加速度を間接的に検出する間接加速度検出手段を有し、
前記加速度補正手段は、前記間接加速度検出手段が検出した前記加速度に応じた回転慣性抗力に基づいて、前記自由降下状態判定手段(110〜130、205、225、230)が前記自由降下状態と判定した際に前記加速度検出手段(12、15、100、200、235)が検出した加速度より求めた0点からのオフセットを補正することを特徴とする請求項1ないし4および6のいずれか1つに記載の車両制御装置。
【請求項8】
前記加速度補正手段は、車輪の回転数から算出した走行距離と走行経路から算出した走行距離との差と車輪のタイヤ空気圧および車両重量の少なくとも1つの情報に基づいて、前記直接加速度検出手段(12、100、200)の検出した加速度を補正することを特徴とする請求項1ないし4、6および7のいずれか1つに記載の車両制御装置。
【請求項1】
車両に加わる加速度を検出する加速度検出手段(12、15、100、200、235)と、
前記加速度検出手段(12、15、100、200、235)の検出した加速度を補正する加速度補正手段(14、150、245)と、を有し、
前記加速度補正手段(14、150、245)で補正された加速度を用いて車両制御を実行する車両制御装置であって、
前記車両が走行中であることを検出する走行検出手段(11、110、205)と、
前記車両に制動力を付与するための制動手段による制動状態を検出する制動状態検出手段(13、130、230)と、
前記車両に付与される駆動力の状態を検出する駆動状態検出手段(14、120、225)と、
前記車両に駆動力も制動力も発生しない状態である自由降下状態を判定する自由降下状態判定手段(110〜130、205、225、230)と、を備え、
前記加速度検出手段(12、15、100、200、235)は、前記車両に加わる重力加速度を含む加速度を加速度センサ(3)の検出信号に基づいて直接検出する直接加速度検出手段(12、100、200)を有し、
前記自由降下状態判定手段(110〜130、205、225、230)は、前記走行検出手段(11、110、205)にて前記車両が走行中であることが検出され、前記制動状態検出手段(13、130、230)が前記車両に制動力が付与されていない状態を検出し、かつ、前記駆動状態検出手段(14、120、225)が前記車両の加速方向にも減速方向にも駆動力が発生しない無駆動力状態を検出した場合を前記自由降下状態と判定し、
前記加速度補正手段(14、150、245)は、前記自由降下状態判定手段(110〜130、205、225、230)が前記自由降下状態と判定した際に前記加速度検出手段(12、15、100、200、235)が検出した加速度より求めた0点からのオフセットに基づいて、前記直接加速度検出手段(12、100、200)の検出した加速度を補正することを特徴とする車両制御装置。
【請求項2】
前記加速度補正手段(14、150)は、前記自由降下状態判定手段(110〜130)が前記自由降下状態と判定した際に前記加速度検出手段(12、100)が検出した加速度を0点からのオフセットとすることを特徴とする請求項1に記載の車両制御装置。
【請求項3】
前記加速度検出手段(12、15、200、235)は、前記車両の速度である車両速度を検出すると共に、該車両速度に基づいて前記車両の加速度を間接的に検出する間接加速度検出手段(15、235)を有し、
前記加速度補正手段(14、245)は、前記自由降下状態判定手段(205、225、230)が前記自由降下状態と判定した際に前記間接加速度検出手段(15、235)が検出した加速度と、前記自由降下状態と判定される前の車両静止時に前記直接加速度検出手段(12、200)の検出した加速度とに基づいて0点からのオフセットを求めることことを特徴とする請求項1に記載の車両制御装置。
【請求項4】
前記駆動状態検出手段(14、120、225)は、エンジンの停止、クラッチの非接続、ギアがニュートラル位置のうちの少なくとも1つが検出されたことをもって、前記無駆動力状態と判定することを特徴とする請求項1ないし3のいずれか1つに記載の車両ずり下がり状態判定装置。
【請求項5】
前記車両の速度である車両速度を検出する車両速度検出手段を有し、
前記加速度補正手段は、前記車両速度検出手段が検出した前記車両速度が所定の閾速度よりも低い低速度域の際にのみ、前記直接加速度検出手段(12、100、200)の検出した加速度を補正することを特徴とする請求項1ないし4のいずれか1つに記載の車両制御装置。
【請求項6】
前記車両の速度である車両速度を検出する車両速度検出手段を有し、
前記加速度補正手段は、前記車両速度検出手段が検出した前記車両速度に応じた走行抵抗に基づいて、前記自由降下状態判定手段(110〜130、205、225、230)が前記自由降下状態と判定した際に前記加速度検出手段(12、15、100、200、235)が検出した加速度より求めた0点からのオフセットを補正することを特徴とする請求項1ないし4のいずれか1つに記載の車両制御装置。
【請求項7】
前記加速度検出手段は、前記車両の速度である車両速度を検出すると共に、該車両速度に基づいて前記車両の加速度を間接的に検出する間接加速度検出手段を有し、
前記加速度補正手段は、前記間接加速度検出手段が検出した前記加速度に応じた回転慣性抗力に基づいて、前記自由降下状態判定手段(110〜130、205、225、230)が前記自由降下状態と判定した際に前記加速度検出手段(12、15、100、200、235)が検出した加速度より求めた0点からのオフセットを補正することを特徴とする請求項1ないし4および6のいずれか1つに記載の車両制御装置。
【請求項8】
前記加速度補正手段は、車輪の回転数から算出した走行距離と走行経路から算出した走行距離との差と車輪のタイヤ空気圧および車両重量の少なくとも1つの情報に基づいて、前記直接加速度検出手段(12、100、200)の検出した加速度を補正することを特徴とする請求項1ないし4、6および7のいずれか1つに記載の車両制御装置。
【図1】


【図2】
【図3】
【図4】

【図5】

【図6】
【図7】
【図8】

【図9】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−192834(P2012−192834A)
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願番号】特願2011−58201(P2011−58201)
【出願日】平成23年3月16日(2011.3.16)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願日】平成23年3月16日(2011.3.16)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]