
車両制御装置
【課題】自動的にエンジンの運転を停止する制御から復帰するときの車両の応答性を向上できる車両制御装置を提供すること。
【解決手段】車両1の動力源としてのエンジン11と、エンジンと車両の駆動輪16との間に配置され、かつ係合度合いを制御可能なクラッチ3と、を備え、走行時にエンジンに対する燃料の供給を停止する所定制御を実行可能であり、所定制御の実行中にクラッチを係合状態とし、かつクラッチの係合度合いを制御する。係合度合いの制御において、クラッチは、例えば半係合状態とされる。
【解決手段】車両1の動力源としてのエンジン11と、エンジンと車両の駆動輪16との間に配置され、かつ係合度合いを制御可能なクラッチ3と、を備え、走行時にエンジンに対する燃料の供給を停止する所定制御を実行可能であり、所定制御の実行中にクラッチを係合状態とし、かつクラッチの係合度合いを制御する。係合度合いの制御において、クラッチは、例えば半係合状態とされる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両制御装置に関する。
【背景技術】
【0002】
従来、車両においてクラッチを制御する技術が知られている。特許文献1には、車両発進時にオイルポンプを油圧源とする締結圧により締結される発進クラッチと、車両停車時であって、かつ、運転者の制動意図が検出されたときはエンジンを停止し、運転者の制動意図が解除されたときはエンジンを再始動するアイドルストップ制御手段と、を備え、アイドルストップ制御手段によるエンジン再始動時に発進クラッチを締結する車両用アイドルストップ制御装置の技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−111220号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
自動的にエンジンの運転を停止する制御から復帰するときの車両の応答性を向上できることが望まれている。例えば、走行中にエンジンの運転を自動的に停止することが可能な車両において、エンジンの運転を停止する制御からの復帰時にエンジンの始動性や発進クラッチの応答性を向上できることが望まれている。
【0005】
本発明の目的は、自動的にエンジンの運転を停止する制御から復帰するときの車両の応答性を向上できる車両制御装置を提供することである。
【課題を解決するための手段】
【0006】
本発明の車両制御装置は、車両の動力源としてのエンジンと、前記エンジンと前記車両の駆動輪との間に配置され、かつ係合度合いを制御可能なクラッチと、を備え、走行時に前記エンジンに対する燃料の供給を停止する所定制御を実行可能であり、前記所定制御の実行中に前記クラッチを係合状態とし、かつ前記クラッチの係合度合いを制御することを特徴とする。
【0007】
上記車両制御装置において、前記係合度合いの制御において、前記クラッチを半係合状態とすることが好ましい。
【0008】
上記車両制御装置において、前記所定制御の実行中であって、かつ前記クラッチを係合状態とすることで発生するエンジンブレーキによる制動力の大きさを要求制動力の大きさが上回る場合に前記クラッチを係合状態とすることが好ましい。
【0009】
上記車両制御装置において、更に、前記エンジンブレーキによる制動力以外の制動力を制御する制動力制御手段を備え、前記所定制御の実行中に前記クラッチを係合状態とするときに、前記要求制動力を実現するように前記制動力制御手段を制御することが好ましい。
【0010】
上記車両制御装置において、前記要求制動力に基づいて前記クラッチの係合度合いを制御することが好ましい。
【0011】
上記車両制御装置において、前記所定制御の実行中であって、かつ前記所定制御から復帰する復帰条件の成立が予測される場合に、前記クラッチを係合状態とすることが好ましい。
【0012】
上記車両制御装置において、前記復帰条件は、前記エンジンに対する再始動要求、あるいは前記車両に対する加速要求の少なくともいずれか一方がなされることを含むことが好ましい。
【0013】
上記車両制御装置において、前記車両のブレーキ装置に対する操作量に基づいて前記復帰条件の成立を予測することが好ましい。
【0014】
上記車両制御装置において、前記所定制御の実行中であって、かつ前記エンジンの回転数を前記エンジンが自立的に再始動できる回転数に維持できる場合に、前記クラッチを係合状態とすることが好ましい。
【0015】
上記車両制御装置において、更に、前記エンジンに係合した状態と前記エンジンに係合していない状態とに切替え可能であり、かつ前記係合した状態で前記エンジンを始動させる始動装置を備え、前記始動装置は、前記エンジンの回転数が所定回転数以下である場合に前記係合していない状態から前記係合した状態に切替え可能なものであり、前記所定制御の実行中であって、かつ前記エンジンの回転数を前記所定回転数以下に維持できる場合に、前記クラッチを係合状態とすることが好ましい。
【発明の効果】
【0016】
本発明にかかる車両制御装置は、エンジンと車両の駆動輪との間に配置され、かつ係合度合いを制御可能なクラッチを備え、走行時にエンジンに対する燃料の供給を停止する所定制御を実行可能であり、所定制御の実行中にクラッチを係合状態とし、かつクラッチの係合度合いを制御する。本発明にかかる車両制御装置によれば、自動的にエンジンの運転を停止する制御から復帰するときの車両の応答性を向上できるという効果を奏する。
【図面の簡単な説明】
【0017】
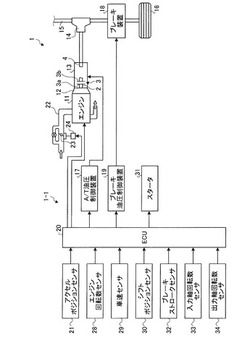
【図1】図1は、実施形態にかかる車両制御装置を搭載した車両を示す図である。
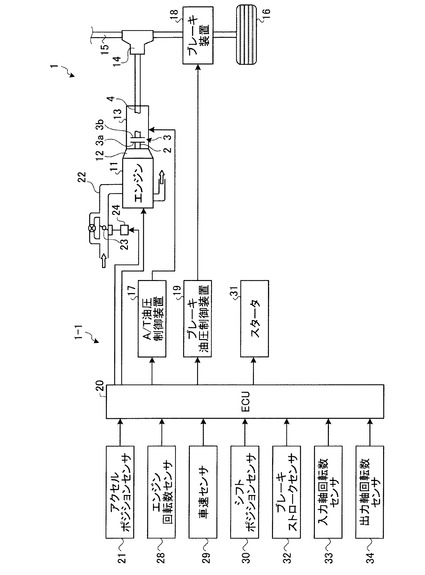
【図2】図2は、ブレーキストロークに基づくエンジン再始動要求の判定方法を説明するための図である。
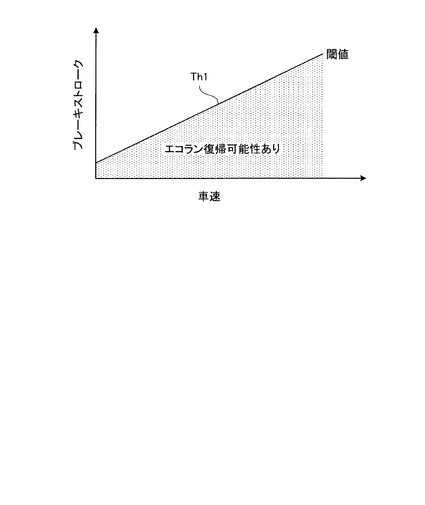
【図3】図3は、ブレーキ抜き速度に基づくエンジン再始動要求の判定方法を説明するための図である。
【図4】図4は、自立復帰可能なエンジン回転数の領域を示す図である。
【図5】図5は、スタータ飛込みが可能なエンジン回転数を示す図である。
【図6】図6は、クラッチを半係合で待機させる領域を示す図である。
【図7】図7は、第4実施形態の動作を示すフローチャートである。
【発明を実施するための形態】
【0018】
以下に、本発明の実施形態にかかる車両制御装置につき図面を参照しつつ詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記の実施形態における構成要素には、当業者が容易に想定できるものあるいは実質的に同一のものが含まれる。
【0019】
(第1実施形態)
図1から図3を参照して、第1実施形態について説明する。本実施形態は、車両制御装置に関する。図1は、本発明の実施形態にかかる車両制御装置を搭載した車両を示す図である。
【0020】
本実施形態の車両制御装置1−1は、エコランを実行可能な車両において、エコラン復帰時の加速応答性を向上させることができる。例えば、車両走行中のエコラン実施時に、ブレーキペダルの操作量と車速などから直近のエンジン再始動の可能性有りと判定した場合、車両制御装置1−1は発進クラッチを半係合させた状態で待機させる。これにより、エコラン中もエンジン回転数が引き上げられ、スタータなどを使用せずにエンジンが自立復帰可能となることで、エンジン始動時間が短縮される。また、発進クラッチの係合時間が短縮可能となる。
【0021】
本実施形態は、以下の要件を満たす車両を前提としている。
(1)停車中および走行中にエンジン停止可能なエコラン機能を備えている。
(2)発進クラッチを備えており、エコラン中の発進クラッチの係合力を変え動力伝達力を完全係合から遮断まで制御できる。
【0022】
図1に示すように、車両1には、動力源としてのエンジン11が設けられている。エンジン11には、トルクコンバータ12を有する自動変速機13が連結されている。エンジン11の駆動力は、トルクコンバータ12を介して自動変速機13に入力され、デファレンシャルギヤ14及びドライブシャフト15を介して駆動輪16に伝達される。自動変速機13は、A/T油圧制御装置17により車両1の運転状態に応じて変速比が自動的に制御される。自動変速機13は、入力軸2、発進クラッチ3および出力軸4を有する。入力軸2は、トルクコンバータ12を介してエンジン11の回転が入力される回転軸である。自動変速機13では、入力軸2に入力されるエンジン11の回転が変速されて出力軸4に出力される。出力軸4に出力された回転は、デファレンシャルギヤ14に伝達される。
【0023】
発進クラッチ3は、入力軸2と出力軸4との間に設けられ、入力軸2と出力軸4との動力の伝達を接続あるいは遮断するクラッチである。すなわち、発進クラッチ3は、エンジン11と駆動輪16との間に配置されたものである。発進クラッチ3は、入力軸2に接続された入力側係合部材3aと、出力軸4側に接続された出力側係合部材3bとを有する。出力側係合部材3bは、複数のクラッチあるいはブレーキを介して出力軸4に接続されている。これら複数のクラッチあるいはブレーキをそれぞれ係合あるいは解放することによって、自動変速機13において互いに変速比が異なる複数の変速段を選択的に形成することができる。
【0024】
発進クラッチ3は、自動変速機13において動力の伝達がなされる場合に係合され、動力の伝達がなされない場合に解放される。つまり、自動変速機13においていずれかの変速段が形成されているときに発進クラッチ3が係合されることで、自動変速機13において動力の伝達を行うことができ、発進クラッチ3が解放されていると、動力の伝達が遮断される。つまり、発進クラッチ3は、自動変速機13において変速段が形成されているときに、エンジン11と駆動輪16との動力の伝達を接続あるいは遮断することができるクラッチである。
【0025】
発進クラッチ3は、A/T油圧制御装置17によって供給される係合圧によって制御される。A/T油圧制御装置17は、エンジン11の回転によって駆動されてオイルを吐出するエンジンポンプと、供給される電力によって駆動されてオイルを吐出する電動ポンプとを有する。A/T油圧制御装置17は、エンジン11の運転時には、エンジンポンプから吐出されるオイルを調圧して自動変速機13に供給する。一方、A/T油圧制御装置17は、エコラン制御中は電動ポンプを駆動し、電動ポンプから吐出されるオイルを調圧して自動変速機13に供給する。
【0026】
なお、A/T油圧制御装置17は、車輪の回転と連動して回転する回転部材によって駆動される油圧ポンプを有していてもよい。A/T油圧制御装置17は、例えば、自動変速機13と駆動輪16との間の回転部材によって回転駆動されることでオイルを吐出するポンプを有し、このポンプから吐出されるオイルを調圧して自動変速機13に供給するようにしてもよい。このようにすれば、エコラン制御中にエンジン回転数が低下し、あるいはエンジン11が停止しているときであっても、安定的に自動変速機13に油圧を供給することが可能となる。
【0027】
発進クラッチ3は、A/T油圧制御装置17から供給される係合圧に応じて係合あるいは解放すると共に、係合度合いを制御可能となっている。ここで、係合度合いとは、発進クラッチ3における入力軸2側と出力軸4側との動力の伝達度合いに対応する。すなわち、発進クラッチ3は、入力側係合部材3aと出力側係合部材3bとが係合し、かつ等しい回転数で一体回転する完全係合状態と、入力側係合部材3aと出力側係合部材3bとが係合し、かつ相対回転する半係合状態と、入力側係合部材3aと出力側係合部材3bとが動力を伝達しない解放状態と、に制御可能である。また、発進クラッチ3は、半係合状態における入力側係合部材3aと出力側係合部材3bとのスリップ量やスリップ率を制御可能である。発進クラッチ3は、係合圧に応じて、スリップ量やスリップ率が0の完全係合状態から、スリップ量やスリップ率が最大の解放状態まで任意に制御可能である。
【0028】
発進クラッチ3の係合度合いを制御するとは、発進クラッチ3の状態を完全係合状態、半係合状態および解放状態のいずれかの状態から他の状態に切替えることを含み、さらに、半係合状態において発進クラッチ3におけるスリップ量やスリップ率を制御することを含む。例えば、入力側係合部材3aの回転数を目標の回転数に制御することや、スリップ量やスリップ率を目標値に制御すること、エンジンブレーキによる制動力を目標の制動力とするように発進クラッチ3を制御することは、発進クラッチ3の係合度合いを制御することに含まれる。
【0029】
このように、発進クラッチ3は、エンジン11と駆動輪16との動力の伝達を接続あるいは遮断可能である。また、エンジン11と駆動輪16とで動力を伝達するときの発進クラッチ3の係合度合いを制御することで、エンジン11と駆動輪16との動力の伝達度合いを制御可能である。
【0030】
ブレーキ装置18は、車両1の各車輪に設けられている。ブレーキ装置18は、車両1の制動力を制御する制動力制御手段としての機能を有する。車両1は、図示しないブレーキペダルを備えている。運転者は、ブレーキペダルに対する操作により、ブレーキ装置18を作動させ、ブレーキ装置18によって制動力を発生させることができる。具体的には、ブレーキペダルに対する操作量は、ブレーキ油圧に変換されてブレーキ装置18を作動させる。ブレーキ装置18は、ブレーキ油圧によって、各車輪に摩擦による制動力を発生させる。また、ブレーキ装置18は、ブレーキ油圧制御装置19によって制御されて、車両1を制動することもできる。
【0031】
車両1には、エンジン11や自動変速機13やブレーキ装置18などを制御する電子制御ユニット(ECU)20が設けられている。ECU20は、エンジン11、自動変速機13(A/T油圧制御装置17)及びブレーキ装置18(ブレーキ油圧制御装置19)の総合的な制御を行う。本実施形態の車両制御装置1−1は、エンジン11、発進クラッチ3およびECU30を備える。
【0032】
車両1には、アクセルペダルの操作量(アクセル開度)を検出するアクセルポジションセンサ21が設けられている。アクセルポジションセンサ21により検出されたアクセル開度を示す信号は、ECU20に出力される。エンジン11の吸気管22に設けられたスロットルコントロールバルブ23は、スロットルアクチュエータ24により開閉可能とされている。
【0033】
エンジン11には、エンジン回転数(エンジン回転速度)を検出するエンジン回転数センサ28が設けられている。車速センサ29は、車両1の車速を検出する。シフトポジションセンサ30は、運転者が操作するシフトレバーの位置(シフトポジション)を検出する。ブレーキストロークセンサ32は、ブレーキペダルの踏込み量(ペダルストローク)を検出する。入力軸回転数センサ33は、自動変速機13の入力軸2の回転数を検出する。出力軸回転数センサ34は、自動変速機13の出力軸4の回転数を検出する。各センサ28,29,30,32,33,34の検出結果を示す信号は、ECU20に出力される。
【0034】
ECU20は、変速マップを有しており、スロットル開度、車速などに基づいて、自動変速機13の変速段を決定し、この決定された変速段を成立させるようにA/T油圧制御装置17を制御することができる。
【0035】
エンジン11には、スタータ31が設けられている。スタータ31は、エンジン11を始動する始動装置である。スタータ31は、エンジン始動時にエンジン11の回転軸に対して動力を伝達可能に接続される。スタータ31は、例えば、DCモータを有し、バッテリからの電力を消費して動力を出力し、この動力によってエンジン11を回転させることができる。スタータ31は、ECU20に接続されており、ECU20によって制御される。
【0036】
ECU20は、エンジン11に対する燃料の供給を停止して惰性により車両1を走行させる所定制御を実行可能である。以下、所定制御を「エコラン制御」とも記載する。エコラン制御は、例えば、車両1の走行中にアクセルオフされた場合に実行されるものである。エコラン制御中は、燃料が消費されないため、エコラン制御を実行することで燃費の向上を図ることができる。なお、エコラン制御は、走行中に限らず、車両1の停車中に実行されてもよい。
【0037】
ECU20は、例えば、アクセルポジションセンサ21の検出結果に基づき、アクセルオフと判定するとエコラン制御を実行する。エコラン制御を実行する場合、ECU20は、エンジン11に対する燃料の供給を停止してエンジン11の運転を停止する。ここで、エンジン11の運転とは、エンジン11に対して燃料が供給されて、エンジン11が自立的に回転する作動状態を示す。エンジン11の運転が停止されると、エンジン11は被駆動状態あるいは回転が停止した動作停止状態となる。燃料の供給が停止されたエンジン11は、駆動輪16との間で動力が伝達される状態であれば駆動輪16の回転によって駆動される被駆動状態となり、駆動輪16との間で動力が伝達されない状態であれば、回転を停止する。
【0038】
ECU20は、エコラン制御時において、発進クラッチ3を解放し、エンジン11の回転を停止させて車両1を走行させることができる。このようにエコラン制御時に発進クラッチ3を解放すると、車両1は、エンジン11と駆動輪16との動力の伝達経路が遮断され、エンジンブレーキが作用しないフリーラン状態となる。フリーラン状態では、走行抵抗が小さくなり、燃費の向上が可能となる。
【0039】
エコラン制御の実行中に、エコラン制御から復帰する復帰条件が成立すると、ECU20は、エンジン11を再始動させる。ECU20は、例えば、アクセルが踏み込まれた場合など、エンジン11に対する再始動要求、あるいは車両1に対する加速要求の少なくともいずれか一方の要求があった場合に、車両1をエコラン制御から復帰させる。つまり、復帰条件は、エンジン11に対する再始動要求、あるいは車両1に対する加速要求の少なくともいずれか一方がなされることを含むものとすることができる。
【0040】
エコラン制御中に発進クラッチ3が解放されていた場合であれば、ECU20は、スタータ31によってエンジン11を回転させてエンジン11を始動し、エンジン11の始動後に発進クラッチ3を係合させる。このように、エコラン制御からの復帰時において、復帰要求がなされてから実際に駆動力が出るまでに、スタータ31によるエンジン始動および発進クラッチ3の係合に要する時間分の遅れが生じる。ドライバビリティを向上させる観点からは、この遅れ時間を低減できることが好ましい。
【0041】
本実施形態の車両制御装置1−1は、エコラン制御の実行中に発進クラッチ3を係合状態とし、かつ発進クラッチ3の係合度合いを制御する。これにより、エコラン制御から復帰するときの車両1の応答性を向上させることができる。
【0042】
ECU20は、例えば、車速、ブレーキ、エンジン回転数から算出するスリップ量で発進クラッチ3を制御可能であれば、エコラン制御の実行中に発進クラッチ3の係合制御を実行する。発進クラッチ3の係合制御がなされることで、エコラン制御中のエンジン回転数が引き上げられ、スタータ31を使用せずエンジン11が自立復帰可能となることでエンジン始動時間が短縮される。また、発進クラッチ3が既に係合状態となっていることで、発進クラッチ3の係合時間が短縮される。
【0043】
エコラン制御中において、発進クラッチ3の係合度合いが制御されるときに、発進クラッチ3は例えば半係合状態とされ、スリップ量が制御される。この状態でエコラン制御から復帰するときは、エンジン11を自立的に再始動させて半係合状態の発進クラッチ3を完全係合状態とするだけでよい。一方、エコラン制御中に発進クラッチ3が解放されていた場合、エコラン制御から復帰するときは、エンジン11の始動に要する時間、発進クラッチ3の係合部材3a,3bのクリアランスを詰めるガタ詰めに要する時間、および発進クラッチ3の係合度合いを徐々に増加させるために要する時間が更に必要となる。
【0044】
本実施形態では、ECU20は、エコラン制御の実行中であって、エンジン再始動要求が推定あるいは予測されるときに発進クラッチ3を半係合で待機させる。これにより、実際にエンジン始動要求がなされたときには高応答で駆動力を出力できる。また、エンジン再始動要求が予測されないときには発進クラッチ3を解放状態として燃費の向上を図ることができる。
【0045】
ECU20は、図2を参照して説明するように、運転者によるブレーキ装置18に対する操作量に基づいて復帰条件の成立を予測する。図2は、ブレーキストロークに基づくエンジン再始動要求の判定方法を説明するための図である。図2において、横軸は車速、縦軸はブレーキストロークをそれぞれ示す。符号Th1は、ブレーキストロークの閾値を示す。閾値Th1は、車速に応じて可変とされており、車速が大きくなるほど閾値Th1が増加する。ブレーキストロークが大きな場合、停車のためのブレーキ操作等と考えられ、その後にエンジン再始動要求がなされる可能性は比較的低いと予測できる。一方、ブレーキストロークが小さい場合、車速の調整などの一時的な減速と考えられ、その後にエンジン再始動要求がなされる可能性は比較的高いと予測できる。ECU20は、ブレーキストロークが閾値Th1以下である場合、エコラン制御から復帰する復帰条件の成立が予測されると判定することができる。
【0046】
ECU20は、ブレーキストロークセンサ32によって検出されたブレーキストロークが、閾値Th1以下である場合に、エンジン再始動要求がなされ、エコラン制御から復帰する復帰条件が成立すると予測することができる。車速に応じて閾値Th1が可変とされていることで、エンジン再始動要求を精度よく判定することが可能となる。なお、この閾値Th1は、学習によって補正されてもよい。すなわち、検出されたブレーキストロークと、その後にエンジン再始動要求がなされたか否かとの関係を学習して、閾値Th1の補正がなされるようにしてもよい。
【0047】
ECU20は、エコラン制御中にエンジン再始動要求がなされると予測すると、発進クラッチ3を半係合で待機させる。ECU20は、例えば、エコラン制御の開始時に発進クラッチ3を解放させ、その後に復帰条件が成立すると予測した場合に発進クラッチ3を半係合させる。このようにすれば、復帰可能性が比較的高いときに限り発進クラッチ3を半係合で待機させることができる。また、ECU20は、エコラン制御の開始時に運転者によって制動操作がなされており、復帰条件が成立すると予測した場合には、発進クラッチ3を解放することなく、発進クラッチ3を半係合状態とさせるようにしてもよい。このようにすれば、エンジン回転数が低下しすぎることを抑制し、エコラン制御から復帰する際の応答性を向上させることができる。これにより、エコラン制御から復帰するときのエンジン11の始動性と発進クラッチ係合の応答性を向上させることができる。
【0048】
また、ブレーキストロークに代えて、ブレーキ抜き速度に基づいて復帰条件の成立が判定されてもよい。図3は、ブレーキ抜き速度に基づくエンジン再始動要求の判定方法を説明するための図である。ここで、ブレーキ抜き速度とは、ブレーキストロークが減少するときの減少速度であり、運転者が制動力を緩めるときにブレーキペダルを戻す速度である。
【0049】
図3において、横軸はブレーキストローク、縦軸はブレーキ抜き速度を示す。符号Th2は、ブレーキ抜き速度の閾値を示す。閾値Th2は、ブレーキストロークに応じて可変とされており、ブレーキストロークが大きくなるほど閾値Th2が増加する。ブレーキ抜き速度が小さな場合、減速度を調整するブレーキ操作等と考えられ、その後にエンジン再始動要求がなされる可能性は比較的低いと予測できる。一方、ブレーキ抜き速度が大きな場合、ブレーキOFFとされてアクセル操作がなされるなど、エコラン制御からの復帰条件が成立する可能性が高いと予測できる。
【0050】
ECU20は、ブレーキ抜き速度が閾値Th2以上である場合に、エコランから復帰する可能性があるとしてエンジン再始動要求がなされると予測する。なお、ブレーキ抜き速度の閾値Th2は、学習によって補正されてもよい。ブレーキ抜き速度の閾値Th2がブレーキストロークに応じて可変とされていることで、エンジン再始動要求を精度よく判定することが可能となる。ブレーキ抜き速度の閾値Th2は、ブレーキストロークに代えて車速に応じて可変とされてもよい。
【0051】
なお、エンジン再始動要求の判定において、ブレーキストロークに代えてブレーキ油圧、ブレーキ抜き速度に代えてブレーキ圧抜き速度がそれぞれ用いられてもよい。ブレーキ油圧は、例えば、ブレーキ操作によって発生するマスタシリンダ圧とすることができる。また、ブレーキ圧抜き速度は、例えば、マスタシリンダ圧の圧力低下速度とすることができる。また、各閾値Th1,Th2は、車速やブレーキストローク等によらず一定値とされてもよい。
【0052】
本実施形態では、ブレーキストローク、ブレーキ抜き速度、ブレーキ油圧、ブレーキ圧抜き速度等のブレーキ装置18に対する操作量に基づいてエンジン再始動要求が予測されたが、エンジン再始動要求を予測する方法はこれには限定されない。ECU20は、例えば、ブレーキ操作量に代えて、あるいは加えて、勾配、カーブ、先行車等の車両1の走行環境に基づいてエンジン再始動要求を予測するようにしてもよい。また、エコラン制御中に発進クラッチ3を半係合状態とするか否かは、エンジン再始動要求以外のエコラン制御からの復帰条件に応じて定められてもよい。エコラン制御からの復帰条件が成立すると予測される場合に、発進クラッチ3を半係合状態で待機させるようにすればよい。例えば、車両1に対する加速要求が検出されることがエコラン制御からの復帰条件である場合、加速要求が予測される場合に発進クラッチ3を半係合状態とするようにすればよい。
【0053】
なお、本実施形態では、エンジン11に対する再始動要求が予測されるなどのエコラン制御からの復帰に関する条件が成立した場合に発進クラッチ3を半係合状態としたが、このような条件を設けずに、エコラン制御の実行中に常に発進クラッチ3を係合状態とし、かつ発進クラッチ3の係合度合いを制御するようにしてもよい。このようにすれば、エコラン制御中に常にエンジン11の回転数を上げておくことができ、エコラン制御からの復帰における応答性を向上させることができる。
【0054】
本実施形態では、エコラン制御中に発進クラッチ3が半係合状態とされたが、発進クラッチ3の係合度合いはこれには限定されない。例えば、エコラン制御中に、走行状況等に応じて発進クラッチ3のスリップ量が制御される間に、発進クラッチ3が完全係合されてもよい。
【0055】
本実施形態の発進クラッチ3は、自動変速機13内のクラッチであったが、発進クラッチ3はこれには限定されない。発進クラッチ3は、エンジン11と駆動輪16との動力の伝達を接続あるいは遮断し、かつ係合度合いを制御可能なものであればよい。例えば、発進クラッチ3は、自動変速機13の出力軸4等に設けられてもよい。
【0056】
(第2実施形態)
図4を参照して、第2実施形態について説明する。第2実施形態については、上記実施形態で説明したものと同様の機能を有する構成要素には同一の符号を付して重複する説明は省略する。本実施形態では、上記第1実施形態の条件に加えて、あるいは代えて、自立復帰可能な回転数でエンジン11を回転させておくことができる場合に限り発進クラッチ3を半係合で待機させる。これにより、エンジン始動時間が短縮可能な場合に発進クラッチ3を半係合で待機させてエンジン始動性を向上させ、エンジン始動時間が短縮可能でない場合には発進クラッチ3を解放して燃費の向上や発進クラッチ3の保護を図ることができる。
【0057】
ここで、自立復帰可能とは、スタータ31等の助力がなくともエンジン11が運転状態に復帰可能であることを示す。エンジン回転数が一定以上である場合、燃料の供給および点火を開始することでエンジン11は自立的に回転数を増加させて再始動し、運転状態に復帰することができる。
【0058】
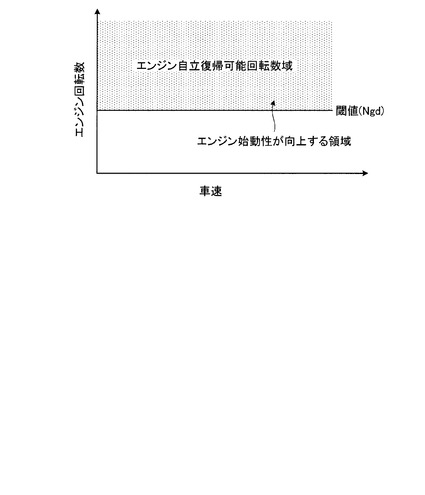
図4は、エンジン11が自立復帰可能なエンジン回転数の領域を示す図である。図4において、横軸は車速、縦軸はエンジン回転数を示す。符号Ngdは、エンジン回転数におけるエンジン11が自立復帰可能な領域の下限の閾値を示す。エンジン回転数がこの閾値Ngd以上であれば、エンジン11は自立的に再始動することができる。ECU20は、発進クラッチ3を半係合で待機させたとして、エンジン回転数をエンジン回転数の閾値Ngd以上に保持できると判定すると、実際に発進クラッチ3を半係合で待機させる。
【0059】
ここで、エンジン11を自立復帰可能とする観点からは、発進クラッチ3の係合度合いを高めてエンジン回転数を高回転とすることが好ましいが、エンジン11のフリクションによるエンジンブレーキが増加して減速感が増大するという背反がある。一方、発進クラッチ3の係合度合いを低下させると減速感を低減させることができるが、スリップによる発進クラッチ3の発熱量が増大してしまう。このため、発進クラッチ3における発熱量と発生するエンジンブレーキとのバランスを考慮することが望ましい。
【0060】
ECU20は、例えば、以下に示す方法によってエンジン回転数を閾値Ngd以上に保持できるか否かを判定する。保持可能な下限のエンジン回転数は、発進クラッチ3の耐熱性に基づいて算出することができる。発進クラッチ3における単位時間あたりの発熱量Q'は、下記式(1)より求めることができる。
Q' = (2π/60)×Tc×Nslp…(1)
ここで、Tc:発進クラッチ3による伝達トルク、Nslp:発進クラッチ3のスリップ量である。
【0061】
発進クラッチ3のスリップ量Nslp(以下、単に「スリップ量Nslp」とも記載する。)は、下記式(2)の関係を有する。
Nslp = Ntcal−Ntreal…(2)
ここで、Ntcal:入力回転数、Ntreal:目標入力回転数である。入力回転数Ntcalは、発進クラッチ3を完全係合させた場合の自動変速機13の入力軸2の回転数であり、出力軸4の回転数Noと自動変速機13のギヤ比γとに基づいて下記式(3)で算出される。なお、出力回転数Noは、駆動輪16の回転数に対応している。
Ntcal = No×γ…(3)
【0062】
また、目標入力回転数Ntrealは、自動変速機13の入力軸回転数における目標値である。エンジン回転数は、目標入力回転数Ntrealと、トルクコンバータ12の滑り量とに基づいて算出することができる。例えば、目標入力回転数Ntrealからトルクコンバータ12の滑り分の回転数を減じたものがエンジン回転数となる。なお、発進クラッチ3のスリップ率Rslpは、例えば、下記式(4)によって算出することができる。
Rslp = Nslp/Ntcal…(4)
【0063】
ここで、発進クラッチ3には、クラッチ摩擦材の耐熱性から決まる単位時間あたりの許容発熱量Q'maxが存在する。つまり、発進クラッチ3におけるスリップ時の発熱量Q'は、下記式(5)を満たす必要がある。
Q' < Q'max…(5)
【0064】
上記式(1)および式(5)から、スリップ量Nslpには、許容発熱量Q'maxから決まる許容スリップ量が存在する。ECU20は、発進クラッチ3を係合状態としたときに発生するエンジンブレーキが過剰とならないスリップ量Nslpを算出し、このスリップ量Nslpが許容スリップ量を超えるか否かを確認する。算出したスリップ量Nslpが許容スリップ量を超えなければ、発熱量の観点からスリップ量Nslpを維持しておくことが可能である。ECU20は、算出したスリップ量Nslpに対応するエンジン回転数が閾値Ngd以上であれば、発進クラッチ3を半係合で待機させる。つまり、ECU20は、過剰な減速度の発生を抑制でき、かつ発進クラッチ3における発熱量Q'を許容範囲内とすることができ、かつエンジン回転数を閾値Ngd以上とできる場合に、発進クラッチ3を半係合で待機させる。本実施形態によれば、エンジン11の始動性および発進クラッチ3の係合応答性を向上させることができると共に、ドライバビリティを向上させることができる。
【0065】
(第3実施形態)
図5を参照して、第3実施形態について説明する。第3実施形態については、上記各実施形態で説明したものと同様の機能を有する構成要素には同一の符号を付して重複する説明は省略する。本実施形態では、上記第1実施形態の条件に加えて、あるいは代えて、スタータ31が飛び込み可能な場合に発進クラッチ3を半係合で待機させる。
【0066】
ここで、飛び込み可能とは、エンジン11が回転している状態において、切り離されていたスタータ31をエンジン11に接続可能であることを示す。例えば、スタータ31とエンジン11との接続方式として、エンジン始動時のみエンジン11とスタータ31とが係合する方式がある。一例として、エンジン始動時にエンジン側のリングギヤに対してスタータ31のピニオンギヤが押し出され、飛び込み噛み合うことでエンジン11とスタータ31とが接続されるものがある。このようなスタータ31は、エンジン11に係合した状態とエンジン11に係合していない状態とに切替え可能であり、かつ係合した状態でエンジン11を始動させることができる。こうした飛込み式のスタータ31では、飛込み可能なエンジン回転数に上限がある。つまり、スタータ31は、エンジン回転数が所定回転以下である場合にエンジン11に係合していない状態からエンジン11に係合した状態に切替え可能である。
【0067】
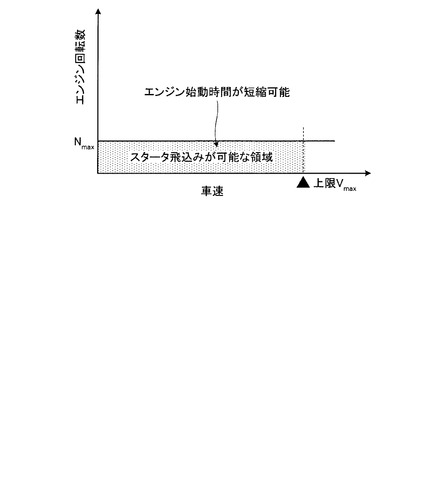
ECU20は、エンジン回転数が低回転でスタータ飛込み可能な場合に発進クラッチ3を半係合で待機させる。図5は、スタータ飛込みが可能なエンジン回転数を示す図である。図5において、横軸は車速、縦軸はエンジン回転数を示す。スタータ飛込み可能なエンジン回転数の上限である上限エンジン回転数Nmaxが定められている。この上限エンジン回転数Nmaxは、所定回転数に対応しており、例えば、300rpm程度である。エンジン再始動要求がなされたときに、エンジン回転数が上限エンジン回転数Nmaxよりも大きな回転数であると、エンジン回転数が上限エンジン回転数Nmax以下となるまで待機してからスタータ31をエンジン11に係合させ、スタータ31によってエンジン11を再始動しなければならない。
【0068】
一方、エンジン回転数を上限エンジン回転数Nmax以下に維持しておけば、エンジン再始動要求がなされた場合に、即座にスタータ31によってエンジン11を再始動させることが可能となる。その結果、エンジン再始動の応答性や加速応答性を向上させることができる。
【0069】
上記式(1)および式(5)から、スリップ量Nslpには発進クラッチ3の許容発熱量Q'maxに基づく上限である許容スリップ量が存在している。つまり、ある程度車速が高くなると、スリップ量Nslpの制限により、エンジン回転数をスタータ飛込み可能なエンジン回転数に維持することができなくなる。符号Vmaxは、エンジン回転数をスタータ飛込み可能なエンジン回転数に維持できる車速の上限を示す。また、出力回転数Noにおいて、車速の上限Vmaxに対応する上限Nomaxが決まる。ECU20は、エコラン制御の実行中であって、かつ出力回転数Noがこの上限Nomax以下である場合に、発進クラッチ3を半係合で待機させる。つまり、ECU20は、エコラン制御の実行中であって、かつエンジン回転数を所定回転数以下に維持できる場合に発進クラッチ3を係合状態とする。これにより、エンジン再始動の応答性や加速応答性の向上を図ることができる。
【0070】
なお、ECU20は、エンジン回転数をスタータ飛込み可能なエンジン回転数に維持する場合、例えば、エンジン回転数を上限エンジン回転数Nmaxに維持するようにスリップ量Nslpを制御するようにしてもよい。このようにすれば、発進クラッチ3における発熱量を可能な限り低減させることができる。
【0071】
(第4実施形態)
図6を参照して、第4実施形態について説明する。第4実施形態については、上記各実施形態で説明したものと同様の機能を有する構成要素には同一の符号を付して重複する説明は省略する。本実施形態では、上記各実施形態の条件に加えて、あるいは代えて、要求制動力が所定値である条件を満たす時に発進クラッチ3を半係合で待機させる。これにより、エンジンブレーキが過剰となることを抑制することができる。
【0072】
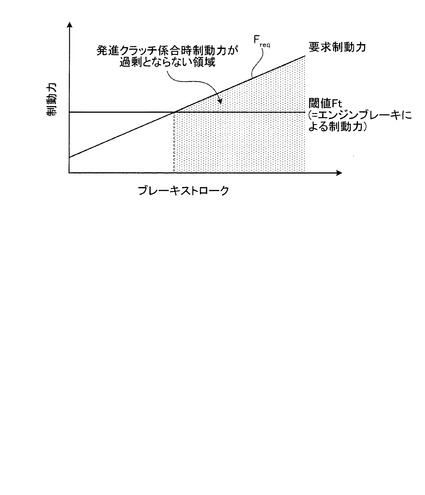
図6は、発進クラッチ3を半係合で待機させる領域を示す図である。図6において、横軸はブレーキストローク、縦軸は制動力を示す。符号Freqは、要求制動力を示す。要求制動力Freqは、ブレーキストロークに応じて増加する値として算出される。符号Ftは、制動力の閾値である。閾値Ftは、発進クラッチ3を係合状態とすることで発生するエンジンブレーキによる制動力であって、ここでは、発進クラッチ3を半係合で待機させることで発生するエンジンブレーキによる制動力を示す。この制動力の閾値Ftは、例えば、上記各実施形態で発進クラッチ3を半係合で待機させるときの目標入力回転数Ntrealや車速等に基づいて算出されるものである。
【0073】
ECU20は、要求制動力Freqの大きさが閾値Ftの大きさを上回る場合に、発進クラッチ3を半係合で待機させる。これにより、発進クラッチ3を係合状態とすることによるエンジンブレーキが過剰となって減速しすぎることを抑制することができる。エンジンブレーキによる制動力Ftを要求制動力Freqが上回るため、ブレーキ装置18等によって制動力を制御できる余地がある。つまり、本実施形態によれば、エンジンブレーキおよびブレーキ装置18等によって制動力を制御可能な場合のみ発進クラッチ3の半係合制御を行うことができる。
【0074】
さらに、ECU20は、発進クラッチ3を半係合で待機させているときに、エンジンブレーキによる制動力とブレーキ装置18による制動力とを協調制御することで要求制動力Freqを実現する。ECU20は、実際の制動力が要求制動力Freqとなるように、エンジンブレーキやブレーキ装置18のブレーキ力などの分担比率を制御する。これにより、運転者の要求制動力Freqを実現しながら発進クラッチ3を半係合で待機させることができる。
【0075】
図7を参照して、本実施形態の動作について説明する。図7は、本実施形態の動作を示すフローチャートである。
【0076】
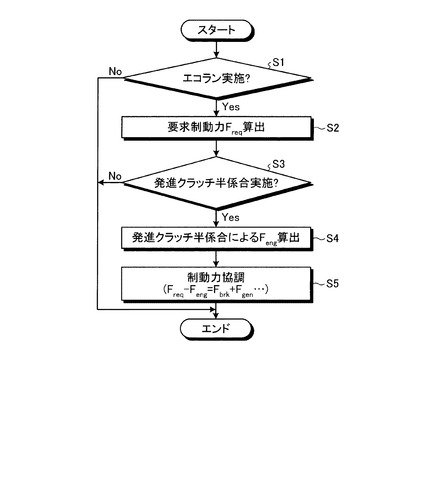
まず、ステップS1では、ECU20により、エコラン実施中であるか否かが判定される。ECU20は、エコラン制御を実施可能な条件が成立してエコランが実行されているか否かを判定する。その判定の結果、エコラン実施中であると判定された場合(ステップS1−Y)にはステップS2に進み、そうでない場合(ステップS1−N)には本制御フローは終了する。
【0077】
ステップS2では、ECU20により、要求制動力Freqが算出される。ECU20は、ブレーキストロークセンサ32によって検出されたブレーキストロークに基づいて要求制動力Freqを算出することができる。なお、ブレーキストロークに代えて、ブレーキ油圧等に基づいて要求制動力Freqが算出されてもよい。ステップS2が実行されると、ステップS3に進む。
【0078】
ステップS3では、ECU20により、発進クラッチ3の半係合を実施するか否かが判定される。例えば、ECU20は、発進クラッチ3を半係合で待機させることで自立復帰可能な回転数でエンジン11を回転させておくことができるときにステップS3で肯定判定を行う。なお、これに代えて、発進クラッチ3を半係合で待機させることでスタータ31が飛込み可能なエンジン回転数でエンジン11を回転させておくことができるときにステップS3で肯定判定を行うようにしてもよい。ステップS3の判定の結果、発進クラッチ3の半係合を実施すると判定された場合(ステップS3−Y)にはステップS4に進み、そうでない場合(ステップS3−N)には本制御フローは終了する。
【0079】
ステップS4では、ECU20により、発進クラッチ3を半係合で待機させることで発生するエンジンブレーキによる制動力Fengが算出される。ECU20は、例えば、発進クラッチ3を半係合で待機させるときの目標入力回転数Ntrealや車速等に基づいてエンジンブレーキによる制動力Fengを算出することができる。ステップS4が実行されると、ステップS5に進む。
【0080】
ステップS5では、ECU20により、制動力の協調制御がなされる。ECU20は、発進クラッチ3を半係合で待機させると共に、制動力の協調制御を実施する。車両1は、ブレーキ装置18以外にも、回生発電により制動力を発生させるオルタネータ等の発電機を備えている。ブレーキ装置18および発電機は、エンジンブレーキによる制動力以外の制動力を制御することができる制動力制御手段として機能する。ECU20は、ブレーキ装置18により発生する制動力Fbrk、オルタネータ等の発電機における回生発電により発生する制動力Fgenなど、車両1に発生させる制動力をそれぞれ制御することができる。
【0081】
ECU20は、ブレーキ装置18や発電機等の制動力制御手段を制御することで、ステップS4で算出したエンジンブレーキによる制動力Fengと、各制動力制御手段で発生させる制動力Fbrk、Fgen...との和が要求制動力Freqとなるようにする。すなわち、ECU20は、エコラン制御の実行中に発進クラッチ3を係合状態とするときに、下記式(6)の関係が満たされるように、各制動力制御手段を制御する。言い換えると、ECU20は、要求制動力Freqを実現するように、ブレーキ装置18および発電機等の制動力制御手段を制御する。なお、ECU20は、要求制動力を実現するように、要求制動力Freqに基づいて発進クラッチ3のスリップ量やスリップ率を制御してもよい。
Freq−Feng = Fbrk+Fgen+...…(6)
ステップS5で制動力の協調制御がなされると、本制御フローは終了する。
【0082】
このように、本実施形態では、ECU20は、エンジンブレーキが過剰となり減速しすぎることを防ぐために、エンジンブレーキと制動力制御手段とで制動力を制御可能な場合のみ発進クラッチ3の半係合制御を行う。また、ECU20は、発進クラッチ3の係合により過剰となった分だけ、その他の制動力を減少させる一方、発進クラッチ3の係合によるエンジンブレーキだけでは制動力が不足する場合、制動力制御手段によって不足する制動力を出力する。これにより、要求制動力Freqに対して過不足を生じることなく発進クラッチ3を半係合で待機させることができる。
【0083】
なお、図7のステップS5に示す制動力の協調制御は、要求制動力Freqが閾値Ftよりも大となって発進クラッチ3が半係合とされた場合に限らず行うことが可能である。すなわち、上記各実施形態でエコラン制御中に発進クラッチ3が係合状態とされているときに、図7のステップS5に示す制動力の協調制御がなされてもよい。
【0084】
上記各実施形態では、エンジン11の駆動力を変速して伝達する変速機として、自動変速機(AT)13を例示したが、これには限定されない。変速機は、手動式の変速機(MT)や、ハイブリッド車両の変速機構であってもよい。また、ハイブリッド車両では、ブレーキ装置18は、摩擦力による制動力を発生させる機構だけでなく、モータによる回生によって制動力を発生させるものも含むことができる。
【0085】
上記の各実施形態に開示された内容は、適宜組み合わせて実行することができる。
【産業上の利用可能性】
【0086】
以上のように、本発明にかかる車両制御装置は、自動的にエンジンの運転を停止する制御から復帰するときの車両の応答性を向上するのに適している。
【符号の説明】
【0087】
1−1 車両制御装置
1 車両
2 入力軸
3 発進クラッチ(クラッチ)
4 出力軸
11 エンジン
13 自動変速機
16 駆動輪
20 ECU
31 スタータ
32 ブレーキストロークセンサ
No 出力回転数
Ntcal 入力回転数
Ntreal 目標入力回転数
Nslp スリップ量
【技術分野】
【0001】
本発明は、車両制御装置に関する。
【背景技術】
【0002】
従来、車両においてクラッチを制御する技術が知られている。特許文献1には、車両発進時にオイルポンプを油圧源とする締結圧により締結される発進クラッチと、車両停車時であって、かつ、運転者の制動意図が検出されたときはエンジンを停止し、運転者の制動意図が解除されたときはエンジンを再始動するアイドルストップ制御手段と、を備え、アイドルストップ制御手段によるエンジン再始動時に発進クラッチを締結する車両用アイドルストップ制御装置の技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−111220号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
自動的にエンジンの運転を停止する制御から復帰するときの車両の応答性を向上できることが望まれている。例えば、走行中にエンジンの運転を自動的に停止することが可能な車両において、エンジンの運転を停止する制御からの復帰時にエンジンの始動性や発進クラッチの応答性を向上できることが望まれている。
【0005】
本発明の目的は、自動的にエンジンの運転を停止する制御から復帰するときの車両の応答性を向上できる車両制御装置を提供することである。
【課題を解決するための手段】
【0006】
本発明の車両制御装置は、車両の動力源としてのエンジンと、前記エンジンと前記車両の駆動輪との間に配置され、かつ係合度合いを制御可能なクラッチと、を備え、走行時に前記エンジンに対する燃料の供給を停止する所定制御を実行可能であり、前記所定制御の実行中に前記クラッチを係合状態とし、かつ前記クラッチの係合度合いを制御することを特徴とする。
【0007】
上記車両制御装置において、前記係合度合いの制御において、前記クラッチを半係合状態とすることが好ましい。
【0008】
上記車両制御装置において、前記所定制御の実行中であって、かつ前記クラッチを係合状態とすることで発生するエンジンブレーキによる制動力の大きさを要求制動力の大きさが上回る場合に前記クラッチを係合状態とすることが好ましい。
【0009】
上記車両制御装置において、更に、前記エンジンブレーキによる制動力以外の制動力を制御する制動力制御手段を備え、前記所定制御の実行中に前記クラッチを係合状態とするときに、前記要求制動力を実現するように前記制動力制御手段を制御することが好ましい。
【0010】
上記車両制御装置において、前記要求制動力に基づいて前記クラッチの係合度合いを制御することが好ましい。
【0011】
上記車両制御装置において、前記所定制御の実行中であって、かつ前記所定制御から復帰する復帰条件の成立が予測される場合に、前記クラッチを係合状態とすることが好ましい。
【0012】
上記車両制御装置において、前記復帰条件は、前記エンジンに対する再始動要求、あるいは前記車両に対する加速要求の少なくともいずれか一方がなされることを含むことが好ましい。
【0013】
上記車両制御装置において、前記車両のブレーキ装置に対する操作量に基づいて前記復帰条件の成立を予測することが好ましい。
【0014】
上記車両制御装置において、前記所定制御の実行中であって、かつ前記エンジンの回転数を前記エンジンが自立的に再始動できる回転数に維持できる場合に、前記クラッチを係合状態とすることが好ましい。
【0015】
上記車両制御装置において、更に、前記エンジンに係合した状態と前記エンジンに係合していない状態とに切替え可能であり、かつ前記係合した状態で前記エンジンを始動させる始動装置を備え、前記始動装置は、前記エンジンの回転数が所定回転数以下である場合に前記係合していない状態から前記係合した状態に切替え可能なものであり、前記所定制御の実行中であって、かつ前記エンジンの回転数を前記所定回転数以下に維持できる場合に、前記クラッチを係合状態とすることが好ましい。
【発明の効果】
【0016】
本発明にかかる車両制御装置は、エンジンと車両の駆動輪との間に配置され、かつ係合度合いを制御可能なクラッチを備え、走行時にエンジンに対する燃料の供給を停止する所定制御を実行可能であり、所定制御の実行中にクラッチを係合状態とし、かつクラッチの係合度合いを制御する。本発明にかかる車両制御装置によれば、自動的にエンジンの運転を停止する制御から復帰するときの車両の応答性を向上できるという効果を奏する。
【図面の簡単な説明】
【0017】
【図1】図1は、実施形態にかかる車両制御装置を搭載した車両を示す図である。
【図2】図2は、ブレーキストロークに基づくエンジン再始動要求の判定方法を説明するための図である。
【図3】図3は、ブレーキ抜き速度に基づくエンジン再始動要求の判定方法を説明するための図である。
【図4】図4は、自立復帰可能なエンジン回転数の領域を示す図である。
【図5】図5は、スタータ飛込みが可能なエンジン回転数を示す図である。
【図6】図6は、クラッチを半係合で待機させる領域を示す図である。
【図7】図7は、第4実施形態の動作を示すフローチャートである。
【発明を実施するための形態】
【0018】
以下に、本発明の実施形態にかかる車両制御装置につき図面を参照しつつ詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記の実施形態における構成要素には、当業者が容易に想定できるものあるいは実質的に同一のものが含まれる。
【0019】
(第1実施形態)
図1から図3を参照して、第1実施形態について説明する。本実施形態は、車両制御装置に関する。図1は、本発明の実施形態にかかる車両制御装置を搭載した車両を示す図である。
【0020】
本実施形態の車両制御装置1−1は、エコランを実行可能な車両において、エコラン復帰時の加速応答性を向上させることができる。例えば、車両走行中のエコラン実施時に、ブレーキペダルの操作量と車速などから直近のエンジン再始動の可能性有りと判定した場合、車両制御装置1−1は発進クラッチを半係合させた状態で待機させる。これにより、エコラン中もエンジン回転数が引き上げられ、スタータなどを使用せずにエンジンが自立復帰可能となることで、エンジン始動時間が短縮される。また、発進クラッチの係合時間が短縮可能となる。
【0021】
本実施形態は、以下の要件を満たす車両を前提としている。
(1)停車中および走行中にエンジン停止可能なエコラン機能を備えている。
(2)発進クラッチを備えており、エコラン中の発進クラッチの係合力を変え動力伝達力を完全係合から遮断まで制御できる。
【0022】
図1に示すように、車両1には、動力源としてのエンジン11が設けられている。エンジン11には、トルクコンバータ12を有する自動変速機13が連結されている。エンジン11の駆動力は、トルクコンバータ12を介して自動変速機13に入力され、デファレンシャルギヤ14及びドライブシャフト15を介して駆動輪16に伝達される。自動変速機13は、A/T油圧制御装置17により車両1の運転状態に応じて変速比が自動的に制御される。自動変速機13は、入力軸2、発進クラッチ3および出力軸4を有する。入力軸2は、トルクコンバータ12を介してエンジン11の回転が入力される回転軸である。自動変速機13では、入力軸2に入力されるエンジン11の回転が変速されて出力軸4に出力される。出力軸4に出力された回転は、デファレンシャルギヤ14に伝達される。
【0023】
発進クラッチ3は、入力軸2と出力軸4との間に設けられ、入力軸2と出力軸4との動力の伝達を接続あるいは遮断するクラッチである。すなわち、発進クラッチ3は、エンジン11と駆動輪16との間に配置されたものである。発進クラッチ3は、入力軸2に接続された入力側係合部材3aと、出力軸4側に接続された出力側係合部材3bとを有する。出力側係合部材3bは、複数のクラッチあるいはブレーキを介して出力軸4に接続されている。これら複数のクラッチあるいはブレーキをそれぞれ係合あるいは解放することによって、自動変速機13において互いに変速比が異なる複数の変速段を選択的に形成することができる。
【0024】
発進クラッチ3は、自動変速機13において動力の伝達がなされる場合に係合され、動力の伝達がなされない場合に解放される。つまり、自動変速機13においていずれかの変速段が形成されているときに発進クラッチ3が係合されることで、自動変速機13において動力の伝達を行うことができ、発進クラッチ3が解放されていると、動力の伝達が遮断される。つまり、発進クラッチ3は、自動変速機13において変速段が形成されているときに、エンジン11と駆動輪16との動力の伝達を接続あるいは遮断することができるクラッチである。
【0025】
発進クラッチ3は、A/T油圧制御装置17によって供給される係合圧によって制御される。A/T油圧制御装置17は、エンジン11の回転によって駆動されてオイルを吐出するエンジンポンプと、供給される電力によって駆動されてオイルを吐出する電動ポンプとを有する。A/T油圧制御装置17は、エンジン11の運転時には、エンジンポンプから吐出されるオイルを調圧して自動変速機13に供給する。一方、A/T油圧制御装置17は、エコラン制御中は電動ポンプを駆動し、電動ポンプから吐出されるオイルを調圧して自動変速機13に供給する。
【0026】
なお、A/T油圧制御装置17は、車輪の回転と連動して回転する回転部材によって駆動される油圧ポンプを有していてもよい。A/T油圧制御装置17は、例えば、自動変速機13と駆動輪16との間の回転部材によって回転駆動されることでオイルを吐出するポンプを有し、このポンプから吐出されるオイルを調圧して自動変速機13に供給するようにしてもよい。このようにすれば、エコラン制御中にエンジン回転数が低下し、あるいはエンジン11が停止しているときであっても、安定的に自動変速機13に油圧を供給することが可能となる。
【0027】
発進クラッチ3は、A/T油圧制御装置17から供給される係合圧に応じて係合あるいは解放すると共に、係合度合いを制御可能となっている。ここで、係合度合いとは、発進クラッチ3における入力軸2側と出力軸4側との動力の伝達度合いに対応する。すなわち、発進クラッチ3は、入力側係合部材3aと出力側係合部材3bとが係合し、かつ等しい回転数で一体回転する完全係合状態と、入力側係合部材3aと出力側係合部材3bとが係合し、かつ相対回転する半係合状態と、入力側係合部材3aと出力側係合部材3bとが動力を伝達しない解放状態と、に制御可能である。また、発進クラッチ3は、半係合状態における入力側係合部材3aと出力側係合部材3bとのスリップ量やスリップ率を制御可能である。発進クラッチ3は、係合圧に応じて、スリップ量やスリップ率が0の完全係合状態から、スリップ量やスリップ率が最大の解放状態まで任意に制御可能である。
【0028】
発進クラッチ3の係合度合いを制御するとは、発進クラッチ3の状態を完全係合状態、半係合状態および解放状態のいずれかの状態から他の状態に切替えることを含み、さらに、半係合状態において発進クラッチ3におけるスリップ量やスリップ率を制御することを含む。例えば、入力側係合部材3aの回転数を目標の回転数に制御することや、スリップ量やスリップ率を目標値に制御すること、エンジンブレーキによる制動力を目標の制動力とするように発進クラッチ3を制御することは、発進クラッチ3の係合度合いを制御することに含まれる。
【0029】
このように、発進クラッチ3は、エンジン11と駆動輪16との動力の伝達を接続あるいは遮断可能である。また、エンジン11と駆動輪16とで動力を伝達するときの発進クラッチ3の係合度合いを制御することで、エンジン11と駆動輪16との動力の伝達度合いを制御可能である。
【0030】
ブレーキ装置18は、車両1の各車輪に設けられている。ブレーキ装置18は、車両1の制動力を制御する制動力制御手段としての機能を有する。車両1は、図示しないブレーキペダルを備えている。運転者は、ブレーキペダルに対する操作により、ブレーキ装置18を作動させ、ブレーキ装置18によって制動力を発生させることができる。具体的には、ブレーキペダルに対する操作量は、ブレーキ油圧に変換されてブレーキ装置18を作動させる。ブレーキ装置18は、ブレーキ油圧によって、各車輪に摩擦による制動力を発生させる。また、ブレーキ装置18は、ブレーキ油圧制御装置19によって制御されて、車両1を制動することもできる。
【0031】
車両1には、エンジン11や自動変速機13やブレーキ装置18などを制御する電子制御ユニット(ECU)20が設けられている。ECU20は、エンジン11、自動変速機13(A/T油圧制御装置17)及びブレーキ装置18(ブレーキ油圧制御装置19)の総合的な制御を行う。本実施形態の車両制御装置1−1は、エンジン11、発進クラッチ3およびECU30を備える。
【0032】
車両1には、アクセルペダルの操作量(アクセル開度)を検出するアクセルポジションセンサ21が設けられている。アクセルポジションセンサ21により検出されたアクセル開度を示す信号は、ECU20に出力される。エンジン11の吸気管22に設けられたスロットルコントロールバルブ23は、スロットルアクチュエータ24により開閉可能とされている。
【0033】
エンジン11には、エンジン回転数(エンジン回転速度)を検出するエンジン回転数センサ28が設けられている。車速センサ29は、車両1の車速を検出する。シフトポジションセンサ30は、運転者が操作するシフトレバーの位置(シフトポジション)を検出する。ブレーキストロークセンサ32は、ブレーキペダルの踏込み量(ペダルストローク)を検出する。入力軸回転数センサ33は、自動変速機13の入力軸2の回転数を検出する。出力軸回転数センサ34は、自動変速機13の出力軸4の回転数を検出する。各センサ28,29,30,32,33,34の検出結果を示す信号は、ECU20に出力される。
【0034】
ECU20は、変速マップを有しており、スロットル開度、車速などに基づいて、自動変速機13の変速段を決定し、この決定された変速段を成立させるようにA/T油圧制御装置17を制御することができる。
【0035】
エンジン11には、スタータ31が設けられている。スタータ31は、エンジン11を始動する始動装置である。スタータ31は、エンジン始動時にエンジン11の回転軸に対して動力を伝達可能に接続される。スタータ31は、例えば、DCモータを有し、バッテリからの電力を消費して動力を出力し、この動力によってエンジン11を回転させることができる。スタータ31は、ECU20に接続されており、ECU20によって制御される。
【0036】
ECU20は、エンジン11に対する燃料の供給を停止して惰性により車両1を走行させる所定制御を実行可能である。以下、所定制御を「エコラン制御」とも記載する。エコラン制御は、例えば、車両1の走行中にアクセルオフされた場合に実行されるものである。エコラン制御中は、燃料が消費されないため、エコラン制御を実行することで燃費の向上を図ることができる。なお、エコラン制御は、走行中に限らず、車両1の停車中に実行されてもよい。
【0037】
ECU20は、例えば、アクセルポジションセンサ21の検出結果に基づき、アクセルオフと判定するとエコラン制御を実行する。エコラン制御を実行する場合、ECU20は、エンジン11に対する燃料の供給を停止してエンジン11の運転を停止する。ここで、エンジン11の運転とは、エンジン11に対して燃料が供給されて、エンジン11が自立的に回転する作動状態を示す。エンジン11の運転が停止されると、エンジン11は被駆動状態あるいは回転が停止した動作停止状態となる。燃料の供給が停止されたエンジン11は、駆動輪16との間で動力が伝達される状態であれば駆動輪16の回転によって駆動される被駆動状態となり、駆動輪16との間で動力が伝達されない状態であれば、回転を停止する。
【0038】
ECU20は、エコラン制御時において、発進クラッチ3を解放し、エンジン11の回転を停止させて車両1を走行させることができる。このようにエコラン制御時に発進クラッチ3を解放すると、車両1は、エンジン11と駆動輪16との動力の伝達経路が遮断され、エンジンブレーキが作用しないフリーラン状態となる。フリーラン状態では、走行抵抗が小さくなり、燃費の向上が可能となる。
【0039】
エコラン制御の実行中に、エコラン制御から復帰する復帰条件が成立すると、ECU20は、エンジン11を再始動させる。ECU20は、例えば、アクセルが踏み込まれた場合など、エンジン11に対する再始動要求、あるいは車両1に対する加速要求の少なくともいずれか一方の要求があった場合に、車両1をエコラン制御から復帰させる。つまり、復帰条件は、エンジン11に対する再始動要求、あるいは車両1に対する加速要求の少なくともいずれか一方がなされることを含むものとすることができる。
【0040】
エコラン制御中に発進クラッチ3が解放されていた場合であれば、ECU20は、スタータ31によってエンジン11を回転させてエンジン11を始動し、エンジン11の始動後に発進クラッチ3を係合させる。このように、エコラン制御からの復帰時において、復帰要求がなされてから実際に駆動力が出るまでに、スタータ31によるエンジン始動および発進クラッチ3の係合に要する時間分の遅れが生じる。ドライバビリティを向上させる観点からは、この遅れ時間を低減できることが好ましい。
【0041】
本実施形態の車両制御装置1−1は、エコラン制御の実行中に発進クラッチ3を係合状態とし、かつ発進クラッチ3の係合度合いを制御する。これにより、エコラン制御から復帰するときの車両1の応答性を向上させることができる。
【0042】
ECU20は、例えば、車速、ブレーキ、エンジン回転数から算出するスリップ量で発進クラッチ3を制御可能であれば、エコラン制御の実行中に発進クラッチ3の係合制御を実行する。発進クラッチ3の係合制御がなされることで、エコラン制御中のエンジン回転数が引き上げられ、スタータ31を使用せずエンジン11が自立復帰可能となることでエンジン始動時間が短縮される。また、発進クラッチ3が既に係合状態となっていることで、発進クラッチ3の係合時間が短縮される。
【0043】
エコラン制御中において、発進クラッチ3の係合度合いが制御されるときに、発進クラッチ3は例えば半係合状態とされ、スリップ量が制御される。この状態でエコラン制御から復帰するときは、エンジン11を自立的に再始動させて半係合状態の発進クラッチ3を完全係合状態とするだけでよい。一方、エコラン制御中に発進クラッチ3が解放されていた場合、エコラン制御から復帰するときは、エンジン11の始動に要する時間、発進クラッチ3の係合部材3a,3bのクリアランスを詰めるガタ詰めに要する時間、および発進クラッチ3の係合度合いを徐々に増加させるために要する時間が更に必要となる。
【0044】
本実施形態では、ECU20は、エコラン制御の実行中であって、エンジン再始動要求が推定あるいは予測されるときに発進クラッチ3を半係合で待機させる。これにより、実際にエンジン始動要求がなされたときには高応答で駆動力を出力できる。また、エンジン再始動要求が予測されないときには発進クラッチ3を解放状態として燃費の向上を図ることができる。
【0045】
ECU20は、図2を参照して説明するように、運転者によるブレーキ装置18に対する操作量に基づいて復帰条件の成立を予測する。図2は、ブレーキストロークに基づくエンジン再始動要求の判定方法を説明するための図である。図2において、横軸は車速、縦軸はブレーキストロークをそれぞれ示す。符号Th1は、ブレーキストロークの閾値を示す。閾値Th1は、車速に応じて可変とされており、車速が大きくなるほど閾値Th1が増加する。ブレーキストロークが大きな場合、停車のためのブレーキ操作等と考えられ、その後にエンジン再始動要求がなされる可能性は比較的低いと予測できる。一方、ブレーキストロークが小さい場合、車速の調整などの一時的な減速と考えられ、その後にエンジン再始動要求がなされる可能性は比較的高いと予測できる。ECU20は、ブレーキストロークが閾値Th1以下である場合、エコラン制御から復帰する復帰条件の成立が予測されると判定することができる。
【0046】
ECU20は、ブレーキストロークセンサ32によって検出されたブレーキストロークが、閾値Th1以下である場合に、エンジン再始動要求がなされ、エコラン制御から復帰する復帰条件が成立すると予測することができる。車速に応じて閾値Th1が可変とされていることで、エンジン再始動要求を精度よく判定することが可能となる。なお、この閾値Th1は、学習によって補正されてもよい。すなわち、検出されたブレーキストロークと、その後にエンジン再始動要求がなされたか否かとの関係を学習して、閾値Th1の補正がなされるようにしてもよい。
【0047】
ECU20は、エコラン制御中にエンジン再始動要求がなされると予測すると、発進クラッチ3を半係合で待機させる。ECU20は、例えば、エコラン制御の開始時に発進クラッチ3を解放させ、その後に復帰条件が成立すると予測した場合に発進クラッチ3を半係合させる。このようにすれば、復帰可能性が比較的高いときに限り発進クラッチ3を半係合で待機させることができる。また、ECU20は、エコラン制御の開始時に運転者によって制動操作がなされており、復帰条件が成立すると予測した場合には、発進クラッチ3を解放することなく、発進クラッチ3を半係合状態とさせるようにしてもよい。このようにすれば、エンジン回転数が低下しすぎることを抑制し、エコラン制御から復帰する際の応答性を向上させることができる。これにより、エコラン制御から復帰するときのエンジン11の始動性と発進クラッチ係合の応答性を向上させることができる。
【0048】
また、ブレーキストロークに代えて、ブレーキ抜き速度に基づいて復帰条件の成立が判定されてもよい。図3は、ブレーキ抜き速度に基づくエンジン再始動要求の判定方法を説明するための図である。ここで、ブレーキ抜き速度とは、ブレーキストロークが減少するときの減少速度であり、運転者が制動力を緩めるときにブレーキペダルを戻す速度である。
【0049】
図3において、横軸はブレーキストローク、縦軸はブレーキ抜き速度を示す。符号Th2は、ブレーキ抜き速度の閾値を示す。閾値Th2は、ブレーキストロークに応じて可変とされており、ブレーキストロークが大きくなるほど閾値Th2が増加する。ブレーキ抜き速度が小さな場合、減速度を調整するブレーキ操作等と考えられ、その後にエンジン再始動要求がなされる可能性は比較的低いと予測できる。一方、ブレーキ抜き速度が大きな場合、ブレーキOFFとされてアクセル操作がなされるなど、エコラン制御からの復帰条件が成立する可能性が高いと予測できる。
【0050】
ECU20は、ブレーキ抜き速度が閾値Th2以上である場合に、エコランから復帰する可能性があるとしてエンジン再始動要求がなされると予測する。なお、ブレーキ抜き速度の閾値Th2は、学習によって補正されてもよい。ブレーキ抜き速度の閾値Th2がブレーキストロークに応じて可変とされていることで、エンジン再始動要求を精度よく判定することが可能となる。ブレーキ抜き速度の閾値Th2は、ブレーキストロークに代えて車速に応じて可変とされてもよい。
【0051】
なお、エンジン再始動要求の判定において、ブレーキストロークに代えてブレーキ油圧、ブレーキ抜き速度に代えてブレーキ圧抜き速度がそれぞれ用いられてもよい。ブレーキ油圧は、例えば、ブレーキ操作によって発生するマスタシリンダ圧とすることができる。また、ブレーキ圧抜き速度は、例えば、マスタシリンダ圧の圧力低下速度とすることができる。また、各閾値Th1,Th2は、車速やブレーキストローク等によらず一定値とされてもよい。
【0052】
本実施形態では、ブレーキストローク、ブレーキ抜き速度、ブレーキ油圧、ブレーキ圧抜き速度等のブレーキ装置18に対する操作量に基づいてエンジン再始動要求が予測されたが、エンジン再始動要求を予測する方法はこれには限定されない。ECU20は、例えば、ブレーキ操作量に代えて、あるいは加えて、勾配、カーブ、先行車等の車両1の走行環境に基づいてエンジン再始動要求を予測するようにしてもよい。また、エコラン制御中に発進クラッチ3を半係合状態とするか否かは、エンジン再始動要求以外のエコラン制御からの復帰条件に応じて定められてもよい。エコラン制御からの復帰条件が成立すると予測される場合に、発進クラッチ3を半係合状態で待機させるようにすればよい。例えば、車両1に対する加速要求が検出されることがエコラン制御からの復帰条件である場合、加速要求が予測される場合に発進クラッチ3を半係合状態とするようにすればよい。
【0053】
なお、本実施形態では、エンジン11に対する再始動要求が予測されるなどのエコラン制御からの復帰に関する条件が成立した場合に発進クラッチ3を半係合状態としたが、このような条件を設けずに、エコラン制御の実行中に常に発進クラッチ3を係合状態とし、かつ発進クラッチ3の係合度合いを制御するようにしてもよい。このようにすれば、エコラン制御中に常にエンジン11の回転数を上げておくことができ、エコラン制御からの復帰における応答性を向上させることができる。
【0054】
本実施形態では、エコラン制御中に発進クラッチ3が半係合状態とされたが、発進クラッチ3の係合度合いはこれには限定されない。例えば、エコラン制御中に、走行状況等に応じて発進クラッチ3のスリップ量が制御される間に、発進クラッチ3が完全係合されてもよい。
【0055】
本実施形態の発進クラッチ3は、自動変速機13内のクラッチであったが、発進クラッチ3はこれには限定されない。発進クラッチ3は、エンジン11と駆動輪16との動力の伝達を接続あるいは遮断し、かつ係合度合いを制御可能なものであればよい。例えば、発進クラッチ3は、自動変速機13の出力軸4等に設けられてもよい。
【0056】
(第2実施形態)
図4を参照して、第2実施形態について説明する。第2実施形態については、上記実施形態で説明したものと同様の機能を有する構成要素には同一の符号を付して重複する説明は省略する。本実施形態では、上記第1実施形態の条件に加えて、あるいは代えて、自立復帰可能な回転数でエンジン11を回転させておくことができる場合に限り発進クラッチ3を半係合で待機させる。これにより、エンジン始動時間が短縮可能な場合に発進クラッチ3を半係合で待機させてエンジン始動性を向上させ、エンジン始動時間が短縮可能でない場合には発進クラッチ3を解放して燃費の向上や発進クラッチ3の保護を図ることができる。
【0057】
ここで、自立復帰可能とは、スタータ31等の助力がなくともエンジン11が運転状態に復帰可能であることを示す。エンジン回転数が一定以上である場合、燃料の供給および点火を開始することでエンジン11は自立的に回転数を増加させて再始動し、運転状態に復帰することができる。
【0058】
図4は、エンジン11が自立復帰可能なエンジン回転数の領域を示す図である。図4において、横軸は車速、縦軸はエンジン回転数を示す。符号Ngdは、エンジン回転数におけるエンジン11が自立復帰可能な領域の下限の閾値を示す。エンジン回転数がこの閾値Ngd以上であれば、エンジン11は自立的に再始動することができる。ECU20は、発進クラッチ3を半係合で待機させたとして、エンジン回転数をエンジン回転数の閾値Ngd以上に保持できると判定すると、実際に発進クラッチ3を半係合で待機させる。
【0059】
ここで、エンジン11を自立復帰可能とする観点からは、発進クラッチ3の係合度合いを高めてエンジン回転数を高回転とすることが好ましいが、エンジン11のフリクションによるエンジンブレーキが増加して減速感が増大するという背反がある。一方、発進クラッチ3の係合度合いを低下させると減速感を低減させることができるが、スリップによる発進クラッチ3の発熱量が増大してしまう。このため、発進クラッチ3における発熱量と発生するエンジンブレーキとのバランスを考慮することが望ましい。
【0060】
ECU20は、例えば、以下に示す方法によってエンジン回転数を閾値Ngd以上に保持できるか否かを判定する。保持可能な下限のエンジン回転数は、発進クラッチ3の耐熱性に基づいて算出することができる。発進クラッチ3における単位時間あたりの発熱量Q'は、下記式(1)より求めることができる。
Q' = (2π/60)×Tc×Nslp…(1)
ここで、Tc:発進クラッチ3による伝達トルク、Nslp:発進クラッチ3のスリップ量である。
【0061】
発進クラッチ3のスリップ量Nslp(以下、単に「スリップ量Nslp」とも記載する。)は、下記式(2)の関係を有する。
Nslp = Ntcal−Ntreal…(2)
ここで、Ntcal:入力回転数、Ntreal:目標入力回転数である。入力回転数Ntcalは、発進クラッチ3を完全係合させた場合の自動変速機13の入力軸2の回転数であり、出力軸4の回転数Noと自動変速機13のギヤ比γとに基づいて下記式(3)で算出される。なお、出力回転数Noは、駆動輪16の回転数に対応している。
Ntcal = No×γ…(3)
【0062】
また、目標入力回転数Ntrealは、自動変速機13の入力軸回転数における目標値である。エンジン回転数は、目標入力回転数Ntrealと、トルクコンバータ12の滑り量とに基づいて算出することができる。例えば、目標入力回転数Ntrealからトルクコンバータ12の滑り分の回転数を減じたものがエンジン回転数となる。なお、発進クラッチ3のスリップ率Rslpは、例えば、下記式(4)によって算出することができる。
Rslp = Nslp/Ntcal…(4)
【0063】
ここで、発進クラッチ3には、クラッチ摩擦材の耐熱性から決まる単位時間あたりの許容発熱量Q'maxが存在する。つまり、発進クラッチ3におけるスリップ時の発熱量Q'は、下記式(5)を満たす必要がある。
Q' < Q'max…(5)
【0064】
上記式(1)および式(5)から、スリップ量Nslpには、許容発熱量Q'maxから決まる許容スリップ量が存在する。ECU20は、発進クラッチ3を係合状態としたときに発生するエンジンブレーキが過剰とならないスリップ量Nslpを算出し、このスリップ量Nslpが許容スリップ量を超えるか否かを確認する。算出したスリップ量Nslpが許容スリップ量を超えなければ、発熱量の観点からスリップ量Nslpを維持しておくことが可能である。ECU20は、算出したスリップ量Nslpに対応するエンジン回転数が閾値Ngd以上であれば、発進クラッチ3を半係合で待機させる。つまり、ECU20は、過剰な減速度の発生を抑制でき、かつ発進クラッチ3における発熱量Q'を許容範囲内とすることができ、かつエンジン回転数を閾値Ngd以上とできる場合に、発進クラッチ3を半係合で待機させる。本実施形態によれば、エンジン11の始動性および発進クラッチ3の係合応答性を向上させることができると共に、ドライバビリティを向上させることができる。
【0065】
(第3実施形態)
図5を参照して、第3実施形態について説明する。第3実施形態については、上記各実施形態で説明したものと同様の機能を有する構成要素には同一の符号を付して重複する説明は省略する。本実施形態では、上記第1実施形態の条件に加えて、あるいは代えて、スタータ31が飛び込み可能な場合に発進クラッチ3を半係合で待機させる。
【0066】
ここで、飛び込み可能とは、エンジン11が回転している状態において、切り離されていたスタータ31をエンジン11に接続可能であることを示す。例えば、スタータ31とエンジン11との接続方式として、エンジン始動時のみエンジン11とスタータ31とが係合する方式がある。一例として、エンジン始動時にエンジン側のリングギヤに対してスタータ31のピニオンギヤが押し出され、飛び込み噛み合うことでエンジン11とスタータ31とが接続されるものがある。このようなスタータ31は、エンジン11に係合した状態とエンジン11に係合していない状態とに切替え可能であり、かつ係合した状態でエンジン11を始動させることができる。こうした飛込み式のスタータ31では、飛込み可能なエンジン回転数に上限がある。つまり、スタータ31は、エンジン回転数が所定回転以下である場合にエンジン11に係合していない状態からエンジン11に係合した状態に切替え可能である。
【0067】
ECU20は、エンジン回転数が低回転でスタータ飛込み可能な場合に発進クラッチ3を半係合で待機させる。図5は、スタータ飛込みが可能なエンジン回転数を示す図である。図5において、横軸は車速、縦軸はエンジン回転数を示す。スタータ飛込み可能なエンジン回転数の上限である上限エンジン回転数Nmaxが定められている。この上限エンジン回転数Nmaxは、所定回転数に対応しており、例えば、300rpm程度である。エンジン再始動要求がなされたときに、エンジン回転数が上限エンジン回転数Nmaxよりも大きな回転数であると、エンジン回転数が上限エンジン回転数Nmax以下となるまで待機してからスタータ31をエンジン11に係合させ、スタータ31によってエンジン11を再始動しなければならない。
【0068】
一方、エンジン回転数を上限エンジン回転数Nmax以下に維持しておけば、エンジン再始動要求がなされた場合に、即座にスタータ31によってエンジン11を再始動させることが可能となる。その結果、エンジン再始動の応答性や加速応答性を向上させることができる。
【0069】
上記式(1)および式(5)から、スリップ量Nslpには発進クラッチ3の許容発熱量Q'maxに基づく上限である許容スリップ量が存在している。つまり、ある程度車速が高くなると、スリップ量Nslpの制限により、エンジン回転数をスタータ飛込み可能なエンジン回転数に維持することができなくなる。符号Vmaxは、エンジン回転数をスタータ飛込み可能なエンジン回転数に維持できる車速の上限を示す。また、出力回転数Noにおいて、車速の上限Vmaxに対応する上限Nomaxが決まる。ECU20は、エコラン制御の実行中であって、かつ出力回転数Noがこの上限Nomax以下である場合に、発進クラッチ3を半係合で待機させる。つまり、ECU20は、エコラン制御の実行中であって、かつエンジン回転数を所定回転数以下に維持できる場合に発進クラッチ3を係合状態とする。これにより、エンジン再始動の応答性や加速応答性の向上を図ることができる。
【0070】
なお、ECU20は、エンジン回転数をスタータ飛込み可能なエンジン回転数に維持する場合、例えば、エンジン回転数を上限エンジン回転数Nmaxに維持するようにスリップ量Nslpを制御するようにしてもよい。このようにすれば、発進クラッチ3における発熱量を可能な限り低減させることができる。
【0071】
(第4実施形態)
図6を参照して、第4実施形態について説明する。第4実施形態については、上記各実施形態で説明したものと同様の機能を有する構成要素には同一の符号を付して重複する説明は省略する。本実施形態では、上記各実施形態の条件に加えて、あるいは代えて、要求制動力が所定値である条件を満たす時に発進クラッチ3を半係合で待機させる。これにより、エンジンブレーキが過剰となることを抑制することができる。
【0072】
図6は、発進クラッチ3を半係合で待機させる領域を示す図である。図6において、横軸はブレーキストローク、縦軸は制動力を示す。符号Freqは、要求制動力を示す。要求制動力Freqは、ブレーキストロークに応じて増加する値として算出される。符号Ftは、制動力の閾値である。閾値Ftは、発進クラッチ3を係合状態とすることで発生するエンジンブレーキによる制動力であって、ここでは、発進クラッチ3を半係合で待機させることで発生するエンジンブレーキによる制動力を示す。この制動力の閾値Ftは、例えば、上記各実施形態で発進クラッチ3を半係合で待機させるときの目標入力回転数Ntrealや車速等に基づいて算出されるものである。
【0073】
ECU20は、要求制動力Freqの大きさが閾値Ftの大きさを上回る場合に、発進クラッチ3を半係合で待機させる。これにより、発進クラッチ3を係合状態とすることによるエンジンブレーキが過剰となって減速しすぎることを抑制することができる。エンジンブレーキによる制動力Ftを要求制動力Freqが上回るため、ブレーキ装置18等によって制動力を制御できる余地がある。つまり、本実施形態によれば、エンジンブレーキおよびブレーキ装置18等によって制動力を制御可能な場合のみ発進クラッチ3の半係合制御を行うことができる。
【0074】
さらに、ECU20は、発進クラッチ3を半係合で待機させているときに、エンジンブレーキによる制動力とブレーキ装置18による制動力とを協調制御することで要求制動力Freqを実現する。ECU20は、実際の制動力が要求制動力Freqとなるように、エンジンブレーキやブレーキ装置18のブレーキ力などの分担比率を制御する。これにより、運転者の要求制動力Freqを実現しながら発進クラッチ3を半係合で待機させることができる。
【0075】
図7を参照して、本実施形態の動作について説明する。図7は、本実施形態の動作を示すフローチャートである。
【0076】
まず、ステップS1では、ECU20により、エコラン実施中であるか否かが判定される。ECU20は、エコラン制御を実施可能な条件が成立してエコランが実行されているか否かを判定する。その判定の結果、エコラン実施中であると判定された場合(ステップS1−Y)にはステップS2に進み、そうでない場合(ステップS1−N)には本制御フローは終了する。
【0077】
ステップS2では、ECU20により、要求制動力Freqが算出される。ECU20は、ブレーキストロークセンサ32によって検出されたブレーキストロークに基づいて要求制動力Freqを算出することができる。なお、ブレーキストロークに代えて、ブレーキ油圧等に基づいて要求制動力Freqが算出されてもよい。ステップS2が実行されると、ステップS3に進む。
【0078】
ステップS3では、ECU20により、発進クラッチ3の半係合を実施するか否かが判定される。例えば、ECU20は、発進クラッチ3を半係合で待機させることで自立復帰可能な回転数でエンジン11を回転させておくことができるときにステップS3で肯定判定を行う。なお、これに代えて、発進クラッチ3を半係合で待機させることでスタータ31が飛込み可能なエンジン回転数でエンジン11を回転させておくことができるときにステップS3で肯定判定を行うようにしてもよい。ステップS3の判定の結果、発進クラッチ3の半係合を実施すると判定された場合(ステップS3−Y)にはステップS4に進み、そうでない場合(ステップS3−N)には本制御フローは終了する。
【0079】
ステップS4では、ECU20により、発進クラッチ3を半係合で待機させることで発生するエンジンブレーキによる制動力Fengが算出される。ECU20は、例えば、発進クラッチ3を半係合で待機させるときの目標入力回転数Ntrealや車速等に基づいてエンジンブレーキによる制動力Fengを算出することができる。ステップS4が実行されると、ステップS5に進む。
【0080】
ステップS5では、ECU20により、制動力の協調制御がなされる。ECU20は、発進クラッチ3を半係合で待機させると共に、制動力の協調制御を実施する。車両1は、ブレーキ装置18以外にも、回生発電により制動力を発生させるオルタネータ等の発電機を備えている。ブレーキ装置18および発電機は、エンジンブレーキによる制動力以外の制動力を制御することができる制動力制御手段として機能する。ECU20は、ブレーキ装置18により発生する制動力Fbrk、オルタネータ等の発電機における回生発電により発生する制動力Fgenなど、車両1に発生させる制動力をそれぞれ制御することができる。
【0081】
ECU20は、ブレーキ装置18や発電機等の制動力制御手段を制御することで、ステップS4で算出したエンジンブレーキによる制動力Fengと、各制動力制御手段で発生させる制動力Fbrk、Fgen...との和が要求制動力Freqとなるようにする。すなわち、ECU20は、エコラン制御の実行中に発進クラッチ3を係合状態とするときに、下記式(6)の関係が満たされるように、各制動力制御手段を制御する。言い換えると、ECU20は、要求制動力Freqを実現するように、ブレーキ装置18および発電機等の制動力制御手段を制御する。なお、ECU20は、要求制動力を実現するように、要求制動力Freqに基づいて発進クラッチ3のスリップ量やスリップ率を制御してもよい。
Freq−Feng = Fbrk+Fgen+...…(6)
ステップS5で制動力の協調制御がなされると、本制御フローは終了する。
【0082】
このように、本実施形態では、ECU20は、エンジンブレーキが過剰となり減速しすぎることを防ぐために、エンジンブレーキと制動力制御手段とで制動力を制御可能な場合のみ発進クラッチ3の半係合制御を行う。また、ECU20は、発進クラッチ3の係合により過剰となった分だけ、その他の制動力を減少させる一方、発進クラッチ3の係合によるエンジンブレーキだけでは制動力が不足する場合、制動力制御手段によって不足する制動力を出力する。これにより、要求制動力Freqに対して過不足を生じることなく発進クラッチ3を半係合で待機させることができる。
【0083】
なお、図7のステップS5に示す制動力の協調制御は、要求制動力Freqが閾値Ftよりも大となって発進クラッチ3が半係合とされた場合に限らず行うことが可能である。すなわち、上記各実施形態でエコラン制御中に発進クラッチ3が係合状態とされているときに、図7のステップS5に示す制動力の協調制御がなされてもよい。
【0084】
上記各実施形態では、エンジン11の駆動力を変速して伝達する変速機として、自動変速機(AT)13を例示したが、これには限定されない。変速機は、手動式の変速機(MT)や、ハイブリッド車両の変速機構であってもよい。また、ハイブリッド車両では、ブレーキ装置18は、摩擦力による制動力を発生させる機構だけでなく、モータによる回生によって制動力を発生させるものも含むことができる。
【0085】
上記の各実施形態に開示された内容は、適宜組み合わせて実行することができる。
【産業上の利用可能性】
【0086】
以上のように、本発明にかかる車両制御装置は、自動的にエンジンの運転を停止する制御から復帰するときの車両の応答性を向上するのに適している。
【符号の説明】
【0087】
1−1 車両制御装置
1 車両
2 入力軸
3 発進クラッチ(クラッチ)
4 出力軸
11 エンジン
13 自動変速機
16 駆動輪
20 ECU
31 スタータ
32 ブレーキストロークセンサ
No 出力回転数
Ntcal 入力回転数
Ntreal 目標入力回転数
Nslp スリップ量
【特許請求の範囲】
【請求項1】
車両の動力源としてのエンジンと、
前記エンジンと前記車両の駆動輪との間に配置され、かつ係合度合いを制御可能なクラッチと、を備え、
走行時に前記エンジンに対する燃料の供給を停止する所定制御を実行可能であり、
前記所定制御の実行中に前記クラッチを係合状態とし、かつ前記クラッチの係合度合いを制御する
ことを特徴とする車両制御装置。
【請求項2】
前記係合度合いの制御において、前記クラッチを半係合状態とする
請求項1に記載の車両制御装置。
【請求項3】
前記所定制御の実行中であって、かつ前記クラッチを係合状態とすることで発生するエンジンブレーキによる制動力の大きさを要求制動力の大きさが上回る場合に前記クラッチを係合状態とする
請求項1または2に記載の車両制御装置。
【請求項4】
更に、前記エンジンブレーキによる制動力以外の制動力を制御する制動力制御手段を備え、
前記所定制御の実行中に前記クラッチを係合状態とするときに、前記要求制動力を実現するように前記制動力制御手段を制御する
請求項3に記載の車両制御装置。
【請求項5】
前記要求制動力に基づいて前記クラッチの係合度合いを制御する
請求項3または4に記載の車両制御装置。
【請求項6】
前記所定制御の実行中であって、かつ前記所定制御から復帰する復帰条件の成立が予測される場合に、前記クラッチを係合状態とする
請求項1または2に記載の車両制御装置。
【請求項7】
前記復帰条件は、前記エンジンに対する再始動要求、あるいは前記車両に対する加速要求の少なくともいずれか一方がなされることを含む
請求項6に記載の車両制御装置。
【請求項8】
前記車両のブレーキ装置に対する操作量に基づいて前記復帰条件の成立を予測する
請求項6または7に記載の車両制御装置。
【請求項9】
前記所定制御の実行中であって、かつ前記エンジンの回転数を前記エンジンが自立的に再始動できる回転数に維持できる場合に、前記クラッチを係合状態とする
請求項1から8のいずれか1項に記載の車両制御装置。
【請求項10】
更に、前記エンジンに係合した状態と前記エンジンに係合していない状態とに切替え可能であり、かつ前記係合した状態で前記エンジンを始動させる始動装置を備え、
前記始動装置は、前記エンジンの回転数が所定回転数以下である場合に前記係合していない状態から前記係合した状態に切替え可能なものであり、
前記所定制御の実行中であって、かつ前記エンジンの回転数を前記所定回転数以下に維持できる場合に、前記クラッチを係合状態とする
請求項1から8のいずれか1項に記載の車両制御装置。
【請求項1】
車両の動力源としてのエンジンと、
前記エンジンと前記車両の駆動輪との間に配置され、かつ係合度合いを制御可能なクラッチと、を備え、
走行時に前記エンジンに対する燃料の供給を停止する所定制御を実行可能であり、
前記所定制御の実行中に前記クラッチを係合状態とし、かつ前記クラッチの係合度合いを制御する
ことを特徴とする車両制御装置。
【請求項2】
前記係合度合いの制御において、前記クラッチを半係合状態とする
請求項1に記載の車両制御装置。
【請求項3】
前記所定制御の実行中であって、かつ前記クラッチを係合状態とすることで発生するエンジンブレーキによる制動力の大きさを要求制動力の大きさが上回る場合に前記クラッチを係合状態とする
請求項1または2に記載の車両制御装置。
【請求項4】
更に、前記エンジンブレーキによる制動力以外の制動力を制御する制動力制御手段を備え、
前記所定制御の実行中に前記クラッチを係合状態とするときに、前記要求制動力を実現するように前記制動力制御手段を制御する
請求項3に記載の車両制御装置。
【請求項5】
前記要求制動力に基づいて前記クラッチの係合度合いを制御する
請求項3または4に記載の車両制御装置。
【請求項6】
前記所定制御の実行中であって、かつ前記所定制御から復帰する復帰条件の成立が予測される場合に、前記クラッチを係合状態とする
請求項1または2に記載の車両制御装置。
【請求項7】
前記復帰条件は、前記エンジンに対する再始動要求、あるいは前記車両に対する加速要求の少なくともいずれか一方がなされることを含む
請求項6に記載の車両制御装置。
【請求項8】
前記車両のブレーキ装置に対する操作量に基づいて前記復帰条件の成立を予測する
請求項6または7に記載の車両制御装置。
【請求項9】
前記所定制御の実行中であって、かつ前記エンジンの回転数を前記エンジンが自立的に再始動できる回転数に維持できる場合に、前記クラッチを係合状態とする
請求項1から8のいずれか1項に記載の車両制御装置。
【請求項10】
更に、前記エンジンに係合した状態と前記エンジンに係合していない状態とに切替え可能であり、かつ前記係合した状態で前記エンジンを始動させる始動装置を備え、
前記始動装置は、前記エンジンの回転数が所定回転数以下である場合に前記係合していない状態から前記係合した状態に切替え可能なものであり、
前記所定制御の実行中であって、かつ前記エンジンの回転数を前記所定回転数以下に維持できる場合に、前記クラッチを係合状態とする
請求項1から8のいずれか1項に記載の車両制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−97843(P2012−97843A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2010−246558(P2010−246558)
【出願日】平成22年11月2日(2010.11.2)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成22年11月2日(2010.11.2)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]