
車両制御装置
【課題】安定した加速性能を得ることのできる車両制御装置を提供する。
【解決手段】車両には、自動変速機と、内燃機関の吸気バルブのバルブタイミングを変更するバルブタイミング変更機構とが取り付けられる。車両の運転状態に基づく自動変速機の作動制御と内燃機関の運転状態に基づくバルブタイミング変更機構の作動制御とが実行される。車両の加速走行時(S101:YES)にそうでないときと比較して自動変速機の変速比を増大させる(S103)。車両の加速開始時におけるバルブタイミングが遅角側のタイミングであるときに(S102:YES)、進角側のタイミングであるときと比較して(S102:NO)、変速比を増大させる度合いを大きくする。
【解決手段】車両には、自動変速機と、内燃機関の吸気バルブのバルブタイミングを変更するバルブタイミング変更機構とが取り付けられる。車両の運転状態に基づく自動変速機の作動制御と内燃機関の運転状態に基づくバルブタイミング変更機構の作動制御とが実行される。車両の加速走行時(S101:YES)にそうでないときと比較して自動変速機の変速比を増大させる(S103)。車両の加速開始時におけるバルブタイミングが遅角側のタイミングであるときに(S102:YES)、進角側のタイミングであるときと比較して(S102:NO)、変速比を増大させる度合いを大きくする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、吸気バルブのバルブタイミングを変更するバルブタイミング変更機構と車両運転状態に応じて変速比を変更する自動変速機とを備える車両制御装置に関するものである。
【背景技術】
【0002】
近年、車両の変速操作を自動的に行うための自動変速機を同車両に搭載することが多用されている。こうした車両では、車両運転状態(例えばアクセル開度や車両走行速度)に基づき自動変速機の作動が制御されて、同自動変速機の変速比が車両運転状態に応じたかたちで自動的に調節される。
【0003】
また、駆動源として車両に搭載された内燃機関に、吸気バルブのバルブタイミングを変更するためのバルブタイミング変更機構を取り付けることが実用されている。こうした装置では、機関運転状態(例えば吸入空気量や機関回転速度)に基づいてバルブタイミングについての制御目標値が算出されるとともに、その制御目標値とバルブタイミングの実際値とが一致するようにバルブタイミング変更機構の作動が制御される。これにより、吸気バルブのバルブタイミングが機関運転状態に見合うタイミングに設定される。こうしたバルブタイミング変更機構の作動制御を通じて設定される吸気バルブのバルブタイミングは基本的に、内燃機関の出力トルクの要求値が大きいときほど進角側のタイミングになる。
【0004】
さらに特許文献1には、自動変速機が設けられた車両において、高い加速性能を得るべく、車両の加速に際して変速機構の変速比を一時的に増大させる処理を実行する装置が提案されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−129875号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
通常、バルブタイミング変更機構の作動制御においてバルブタイミングの制御目標値が変更された場合、その後においてバルブタイミングの実際値と制御目標値とが一致するようになるまでに若干の遅れがある。そして、この動作遅れ時間は、一定ではなく、制御目標値の変更時における同制御目標値と実際値との差に応じて異なる。
【0007】
そのため車両の加速に際して、動作遅れ時間が長い状況においては実際値が制御目標値より遅角側のタイミングになる状態が長く続くために車両加速度の低下を招く可能性が高いのに対して、動作遅れ時間が短い状況においては実際値が制御目標値より遅角側のタイミングになる状態が短いために車両加速度の低下を招く可能性は低くなる。
【0008】
このように特許文献1に記載の装置は、バルブタイミング変更機構の動作遅れに起因して車両の加速度が不安定化することが避けられず、この点において改善の余地がある。
本発明は、そうした実情に鑑みてなされたものであり、その目的は、安定した加速性能を得ることのできる車両制御装置を提供することにある。
【課題を解決するための手段】
【0009】
以下、上記目的を達成するための手段及びその作用効果について説明する。
請求項1に記載の装置は、車両の変速操作を自動的に行う自動変速機と、車両の駆動源としての内燃機関の吸気バルブのバルブタイミングを変更するバルブタイミング変更機構とを備える。そして、車両の運転状態に基づく自動変速機の作動制御と内燃機関の運転状態に基づくバルブタイミング変更機構の作動制御とが実行される。
【0010】
車両加速の開始時における吸気バルブのバルブタイミングが遅角側のタイミングであるときほど、バルブタイミング変更機構の作動制御におけるバルブタイミングの制御目標値と実際値との差が大きくなる可能性が高く、同バルブタイミング変更機構の動作遅れ時間が長くなり易いために、車両加速度の低下を招き易いと云える。また、自動変速機が搭載された車両では、同自動変速機の変速比を大きくすることによって車両の加速度を大きくすることができる。
【0011】
上記装置では、自動変速機の作動制御が、車両の加速走行時にそうでないとき(例えば定常走行時)と比較して自動変速機の変速比を増大させるとともに、車両加速の開始時における吸気バルブのバルブタイミングが遅角側のタイミングであるときに進角側のタイミングであるときと比較して上記変速比を増大させる度合いを大きくするといったように実行される。そのため、車両加速時において自動変速機の変速比を大きくすることによって、バルブタイミング変更機構の動作遅れに起因する車両加速度の低下分を補償することが可能になる。しかも、車両加速度の低下を招き易いときに同低下を招き難いときと比較して自動変速機の変速比を増大させる度合いを大きくすることができるために、上述したバルブタイミング変更機構の動作遅れ時間のばらつきに応じたかたちで車両加速度の低下分を的確に補うことができる。したがって、バルブタイミング変更機構の動作遅れ時間にばらつきがあるとはいえ、安定した車両の加速性能を得ることができるようになる。
【0012】
上記装置では、前述したように車両加速の開始時におけるバルブタイミングの制御目標値と実際値との差が大きいときにおいて車両加速度の不要な低下が問題になるものの、上記差が小さいときにはバルブタイミング変更機構の動作遅れ時間が短いために車両加速度の低下度合いが小さく、その低下がさほど問題にならない。
【0013】
請求項2に記載の装置では、加速開始時におけるバルブタイミングがその進角側の制御限界と遅角側の制御限界との間の所定タイミングより遅角側のタイミングであるとき、すなわちバルブタイミングの制御目標値と実際値との差が大きくなるときには、自動変速機の変速比が増大される。そのため、このときにはバルブタイミング変更機構の動作遅れに起因する車両加速度の不要な低下を抑えることができる。しかも、加速開始時におけるバルブタイミングが所定タイミングであるときや同所定タイミングより進角側のタイミングであるとき、すなわちバルブタイミングの制御目標値と実際値との差が小さいときには自動変速機の変速比が増大されないために、車両加速度が不要に大きくなることを抑えることができる。したがって上記装置によれば、安定した車両の加速性能を得ることができるようになる。
【0014】
バルブタイミング変更機構を備えた装置に、バルブタイミングの進角側の制御限界と遅角側の制御限界との間の所定タイミングで同バルブタイミングを固定する固定機構を設けることが提案されている。こうした装置では、固定機構によるバルブタイミングの固定や同固定の解除を適正に行うために、所定タイミングが制御パラメータとして予め設定されている。
【0015】
請求項3に記載の装置によれば、そうしたバルブタイミングを所定タイミングで固定する固定機構を備える装置において、同所定パラメータを流用して自動変速機の変速比を増大させるか否かの判断を行うことができる。そのため、この判断を行うタイミングを新たに設定する装置と比較して、車両の運転制御にかかる制御構造の構築にかかる作業の煩雑化や同制御構造の複雑化を抑えることができる。
【0016】
請求項4に記載の装置では、機関運転状態に基づきバルブタイミングの制御目標値が算出されるとともに同制御目標値と前記バルブタイミングの実際値とが一致するようにバルブタイミング変更機構の作動制御が実行される。そして、車両の加速時において自動変速機の変速比を増大させた後において前記制御目標値と前記実際値との差が予め定めた判定値より大きい状態が所定期間にわたって継続したときには前記変速比をさらに増大させるといったように、自動変速機の作動制御が実行される。
【0017】
同装置によれば、前記制御目標値と実際値との差が大きい状態が続いているとき、言い換えれば車両の加速度が大きく低下している可能性が高いときに、自動変速機の変速比をさらに増大させることによって車両加速度を上昇させることができるため、車両加速度の低下を好適に抑えることができる。
【0018】
請求項5に記載の装置では、機関運転状態に基づいて吸気バルブのバルブタイミングの制御目標値が算出されるとともに、同制御目標値とバルブタイミングの実際値とが一致するようにバルブタイミング変更機構の作動制御が実行される。そして、バルブタイミングの制御目標値と実際値との差が予め定めた判定値より小さくなったときに、車両加速時における自動変速機の変速比の増大が停止される。同装置によれば、バルブタイミング変更機構の動作遅れに起因するバルブタイミングの制御目標値と実際値とのずれが適度に小さくなったタイミングで、車両加速度の不要な低下を抑えるための自動変速機の変速比の増大を停止させることができる。
【図面の簡単な説明】
【0019】
【図1】本発明を具体化した一実施の形態にかかる車両制御装置の概略構成を示す略図。
【図2】バルブタイミング変更機構の概略構成を示す略図。
【図3】固定機構の概略構成を示す略図。
【図4】加速時制御処理の実行手順を示すフローチャート。
【図5】加速時制御処理の実行態様の一例を示すタイミングチャート。
【図6】加速時制御処理の実行態様の他の例を示すタイミングチャート。
【発明を実施するための形態】
【0020】
以下、本発明を具体化した一実施の形態にかかる車両制御装置について説明する。
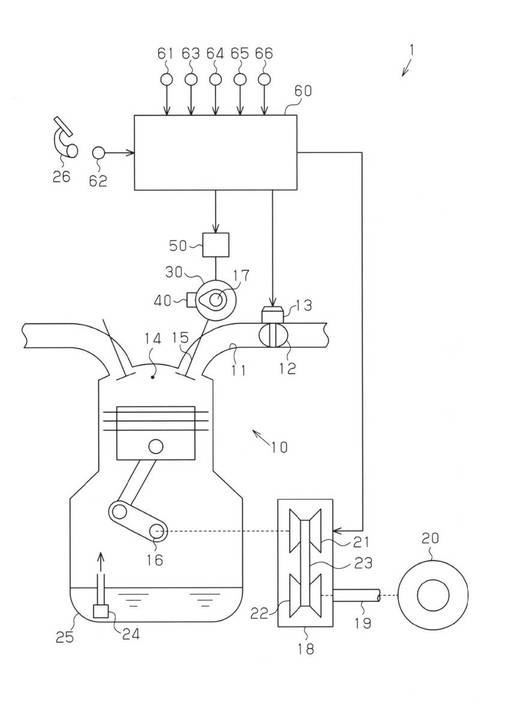
図1に示すように、車両1には車両駆動源としての内燃機関10が搭載されている。内燃機関10の吸気通路11にはスロットルバルブ12が設けられている。スロットルバルブ12には、スロットルモータ13が連結されている。そして、このスロットルモータ13の作動制御を通じてスロットルバルブ12の開度(スロットル開度TA)が調節され、これにより吸気通路11を通じて燃焼室14内に吸入される空気の量(吸入空気量GA)が調節される。内燃機関10において吸気通路11と燃焼室14との間は吸気バルブ15の開閉動作によって連通・遮断される。この吸気バルブ15はクランクシャフト16の回転が伝達される吸気カムシャフト17の回転に伴って開閉動作する。
【0021】
内燃機関10のクランクシャフト16は自動変速機18を介して車軸19および車輪20に連結されている。自動変速機18としては、内燃機関10のクランクシャフト16に連結されたプライマリプーリ21と上記車軸19に連結されたセカンダリプーリ22とそれらプーリ21,22に巻き掛けられたベルト23とを備えたベルト式の無段変速機が採用されている。本実施の形態では、車両1の運転状態に基づく自動変速機18の作動制御を通じて同車両1の変速操作が自動的に行われるようになっている。
【0022】
内燃機関10には吸気バルブ15の開閉時期(バルブタイミング)を変更するためのバルブタイミング変更機構30が設けられている。以下、このバルブタイミング変更機構30について説明する。
【0023】
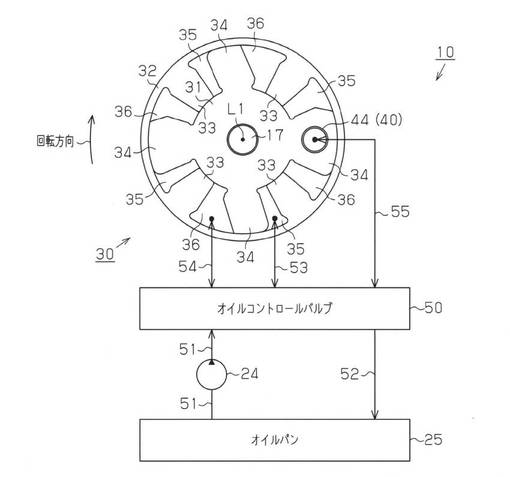
図2に示すように、バルブタイミング変更機構30は、内燃機関10の吸気カムシャフト17に固定されて同吸気カムシャフト17ともども回転する可動部材31と、この可動部材31を囲むように設けられて上記内燃機関10のクランクシャフト16(図1参照)の回転が伝達されるケース32とを備えている。ケース32は、上記可動部材31と同一の回転軸で回転するように配設されている。またケース32の内周面には、吸気カムシャフト17の軸線L1に向かって突出する突部33が周方向において所定の間隔をおいて複数(本実施の形態では、四つ)形成されている。一方、可動部材31の外周面には、吸気カムシャフト17の軸線L1から離間する方向に突出する複数(本実施の形態では、四つ)のベーン34がそれぞれ上記各突部33の間に位置するように形成されている。これにより、ケース32内における各突部33の間に位置する部分が、ベーン34によって進角側油圧室35と遅角側油圧室36とに区画されている。
【0024】
そして、進角側油圧室35にオイルを供給するとともに遅角側油圧室36からオイルを排出すると、可動部材31がケース32に対して一方向(図2における右回転方向)に回転して吸気カムシャフト17のクランクシャフト16に対する相対回転位相が進角側(回転方向前側)に変化する。これにより、吸気カムシャフト17によって開閉駆動される吸気バルブ15のバルブタイミングが進角側に変化するようになる。また、遅角側油圧室36にオイルを供給するとともに進角側油圧室35からオイルを排出すると、可動部材31がケース32に対して一方向(図2における左回転方向)に回転して吸気カムシャフト17のクランクシャフト16に対する相対回転位相が遅角側(回転方向後側)に変化する。それによって吸気バルブ15のバルブタイミングが遅角側に変化するようになる。
【0025】
バルブタイミング変更機構30には、内燃機関10の始動に際して吸気カムシャフト17の相対回転を規制する固定機構40が設けられている。以下、この固定機構40について説明する。
【0026】
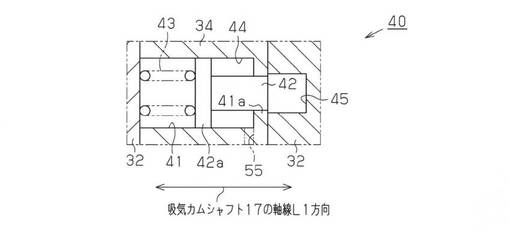
図2または図3に示すように、前記可動部材31のベーン34の一つには、吸気カムシャフト17の軸線L1と平行に延びる段付きの収容孔41が形成されている。この収容孔41の内部にはロックピン42が出没可能に配設されている。ロックピン42は、その段部42aの外周面が上記収容孔41の内周面に摺接した状態で吸気カムシャフト17の軸線L1方向に移動可能になっている。またロックピン42は、その先端部分が収容孔41から脱出する方向(図3における右側)にコイルばね43によって付勢されている。ロックピン42の端部には拡径された形状の上記段部42aが形成されており、この段部42aと上記収容孔41の段部41aとの間には環状の空間である解除用圧力室44が形成されている。解除用圧力室44にオイルを供給すると、同オイルの圧力によって付勢されることにより、ロックピン42がコイルばね43の付勢力に抗して収容孔41内に没入する方向(図3における右側)に移動するようになる。また、解除用圧力室44内のオイルを排出すると、コイルばね43の付勢力によってロックピン42が収容孔41から脱出する方向に移動するようになる。
【0027】
一方、ケース32には、ロックピン42の先端部分を挿入可能な凹部としてのロック穴45が形成されている。ロック穴45の形成位置は、クランクシャフト16(図1参照)に対する吸気カムシャフト17の相対回転位相がその制御可能範囲における進角側の制御限界(最も進角側の位相)と遅角側の制御限界(最も遅角側の位相)との間の中間位相である所定のロック位相になったときにおいてロックピン42の先端部分が挿入可能になる位置に設定されている。なお、このロック位相としては、内燃機関10の始動に適した位相が設定されている。そして、このロック穴45の内部にロックピン42の先端部分が挿入されることにより、バルブタイミング変更機構30のベーン34がケース32に機械的に締結される。これにより、内燃機関10のクランクシャフト16に対する吸気カムシャフト17の相対回転位相が上記ロック位相で固定(ロック)されるようになる。
【0028】
吸気カムシャフト17の相対回転位相がロック位相になった状態で解除用圧力室44内のオイルを排出することにより、ロックピン42の先端部分がロック穴45に挿入されて固定機構40がロック状態になる。一方、ロック状態であるときに解除用圧力室44にオイルを供給することにより、ロックピン42がロック穴45から脱出して固定機構40が解除状態になる。
【0029】
図2に示すように、内燃機関10には、バルブタイミング変更機構30および固定機構40にオイルを圧送するためのオイルポンプ24が設けられている。また、バルブタイミング変更機構30や固定機構40とオイルポンプ24とを繋ぐ油圧回路にはオイルコントロールバルブ50が設けられている。そして、このオイルコントロールバルブ50の作動制御を通じて、バルブタイミング変更機構30の進角側油圧室35および遅角側油圧室36や固定機構40の解除用圧力室44へのオイルの給排態様が制御される。
【0030】
オイルコントロールバルブ50は、オイルを貯留するためのオイルパン25に供給通路51を介して接続されている。この供給通路51の途中には上記オイルポンプ24が設けられている。そして、このオイルポンプ24によって圧送されたオイルが供給通路51を通じてオイルコントロールバルブ50に供給されるようになっている。また、オイルコントロールバルブ50は、排出通路52を介してオイルパン25に接続されている。この排出通路52を通じてオイルコントロールバルブ50内のオイルをオイルパン25に戻すことが可能になっている。
【0031】
一方、オイルコントロールバルブ50は、進角側油路53を介してバルブタイミング変更機構30の進角側油圧室35に接続されるとともに、遅角側油路54を介して同機構30の遅角側油圧室36に接続されている。また、オイルコントロールバルブ50はロック油路55を介して固定機構40の解除用圧力室44に接続されている。
【0032】
図1または図2に示すように、車両1には、同車両1の運転状態や内燃機関10の運転状態を検出するための各種センサが取り付けられている。
各種センサとしては、例えば車両1の走行速度(車速SPD)を検出するための車速センサ61や、アクセル操作部材26(具体的には、アクセルペダル)の操作量(アクセル開度ACC)を検出するためのアクセルセンサ62が取り付けられている。また、スロットル開度TAを検出するためのスロットルセンサ63や、内燃機関10のクランクシャフト16の回転速度(機関回転速度NE)を検出するための回転速度センサ64、吸入空気量GAを検出するための吸気量センサ65が取り付けられている。その他、吸気バルブ15のバルブタイミング(バルブタイミングVT)を検出するためのカムセンサ66なども取り付けられている。
【0033】
また車両1には、例えばマイクロコンピュータを備えて構成される電子制御装置60が取り付けられている。この電子制御装置60は、各種センサの検出信号を取り込むとともにそれら検出信号に基づき各種の演算を行い、その演算結果に基づいてスロットルモータ13や、自動変速機18、バルブタイミング変更機構30ならびに固定機構40(詳しくは、オイルコントロールバルブ50)の作動制御など、車両1の運転にかかる各種制御を実行する。
【0034】
そうした各種制御のうちの自動変速機18の作動制御は次のように実行される。すなわち先ず、アクセル開度ACCおよび車速SPDに基づいて自動変速機18のプライマリプーリ21の回転速度についての制御目標値(目標回転速度Tpr)が設定される。そして、この目標回転速度Tprと実際のプライマリプーリ21の回転速度とが一致するように、同プライマリプーリ21の有効径が調節される。本実施の形態では、こうした自動変速機18の作動制御を通じて同自動変速機18の変速比が車両1の運転状態に応じて自動的に且つ無段階に変更される。
【0035】
一方、スロットルモータ13の作動制御は次のように実行される。すなわち先ず、アクセル開度ACCおよび機関回転速度NEに基づいて吸入空気量GAについての制御目標値(要求吸入空気量Tga)が算出される。その後、要求吸入空気量Tgaおよび機関回転速度NEに基づいてスロットル開度TAについての制御目標値(目標スロットル開度Tta)が算出される。そして、この目標スロットル開度Ttaと実際のスロットル開度TAとが一致するようにスロットルモータ13の作動が制御される。
【0036】
他方、オイルコントロールバルブ50の作動制御は以下のように実行される。
内燃機関10の運転中においては、基本的に、固定機構40の解除用圧力室44内部にオイルが供給されるようにオイルコントロールバルブ50の作動が制御されて同固定機構40が解除状態にされる。また、上記要求吸入空気量Tgaおよび機関回転速度NEに基づいてバルブタイミングVTについての制御目標値(目標バルブタイミングTvt)が算出されるとともに、この目標バルブタイミングTvtと実際のバルブタイミングVTとが一致するようにオイルコントロールバルブ50の作動制御が実行される。こうしたオイルコントロールバルブ50の作動制御は、内燃機関10の燃焼室14内に吸入空気を効率よく導入することなどを目的に実行される。
【0037】
なお本実施の形態では、要求吸入空気量Tgaと機関回転速度NEとが共に中程度になる内燃機関10の中回転中負荷領域において、圧縮比より膨張比が大きい燃焼サイクル(いわゆるアトキンソンサイクル)での機関運転が実行される。具体的には、バルブタイミングVTを制御可能範囲における最も遅角側のタイミング(あるいは最も遅角側のタイミングに近いタイミング)に制御することにより、吸気バルブ15の閉弁時期が圧縮行程中の所定時期(具体的には、圧縮行程中期)に設定されてアトキンソンサイクルでの機関運転が実現される。このようにしてアトキンソンサイクルでの機関運転を行うことにより、圧縮比と膨張比とが等しい通常の燃焼サイクル(いわゆるオットーサイクル)での機関運転と比較して熱効率が高くなるため、燃費性能の向上が図られる。
【0038】
内燃機関10の運転停止過程や始動過程においては、吸気カムシャフト17の相対回転位相がロック位相になるように、且つ解除用圧力室44からオイルが排出されるように、オイルコントロールバルブ50の作動制御が実行される。これにより、内燃機関10の運転停止過程においては固定機構40による吸気カムシャフト17の相対回転位相のロック位相でのロックが適正に行われるようになる。また内燃機関10の始動過程においては吸気カムシャフト17の相対回転位相がロック位相(すなわち機関始動に適した位相)で保持されるため、同内燃機関10の始動が適正に行われるようになる。
【0039】
ここで、本実施の形態において採用されている油圧作動式のバルブタイミング変更機構30には動作遅れがある。すなわち内燃機関10の運転状態が変化して目標バルブタイミングTvtが変化すると、その後において目標バルブタイミングTvtと実際値(バルブタイミングVT)とが一致するようになるまでに若干の遅れがある。こうしたバルブタイミング変更機構30の動作遅れ時間は、一定ではなく、目標バルブタイミングTvtの変化時における同目標バルブタイミングTvtとバルブタイミングVTとの差が大きいときほどバルブタイミング変更機構30の動作遅れ時間は長くなるといったように、同差に応じて異なる。
【0040】
そのため車両1の加速に際して、上記動作遅れ時間が長い状況においては実際のバルブタイミングVTが目標バルブタイミングTvtより遅角側のタイミングになる状態が長く続くために車両1の加速度の低下を招く可能性が高い。これに対して、上記動作遅れ時間が短い状況においては実際のバルブタイミングVTが目標バルブタイミングTvtより遅角側のタイミングになる時間が短いために車両加速度の低下を招く可能性は低くなる。このように本実施の形態の装置では、バルブタイミング変更機構30の動作遅れに起因して車両1の加速度合いが不安定になるおそれがある。
【0041】
本実施の形態の装置では、アトキンソンサイクルでの機関運転を実現するべく、バルブタイミングVTの制御可能範囲が遅角側に広くなっている。詳しくは、アトキンソンサイクルでの機関運転が実行されない比較例の装置における制御可能範囲と比較して、吸気カムシャフト17の相対回転位相がロック位相より遅角側になる制御範囲の分だけ、バルブタイミングVTの制御可能範囲が広くなっている。したがって本実施の形態の装置は、上記比較例の装置よりも目標バルブタイミングTvtとバルブタイミングVTとの差が大きくなり易く、バルブタイミング変更機構30の動作遅れ時間が長くなり易いために、車両加速度の低下を招き易いと云える。
【0042】
アクセル操作部材26の操作を通じて車両1が加速される際には、要求吸入空気量Tgaの増加に伴って目標バルブタイミングTvtが進角側のタイミングに変化するため、加速開始時におけるバルブタイミングVTが遅角側のタイミングであるときほど、目標バルブタイミングTvtと実際のバルブタイミングVTとの差が大きくなる可能性が高い。そのため、バルブタイミング変更機構30の動作遅れ時間が長くなり易く、車両加速度の低下を招き易いと云える。その一方で、本実施の形態の装置では自動変速機18の変速比を大きくすることによって車両1の加速度を大きくすることができる。
【0043】
この点をふまえて本実施の形態の装置では、バルブタイミング変更機構30の動作遅れに起因する車両加速度の低下を抑えるために、車両1の加速走行時にそうでないとき(例えば定常走行時)と比較して自動変速機18の変速比を増大させるようにしている。詳しくは、自動変速機18の変速比を増大させる処理を、車両1の加速開始時におけるバルブタイミングVTが所定タイミングより遅角側のタイミングであるときには実行する一方、同所定タイミングであるときや所定タイミングより進角側のタイミングであるときには実行しないようにしている。なお所定タイミングとしては、吸気カムシャフト17の相対回転位相がロック位相になるバルブタイミングVTが設定される。
【0044】
車両1の加速時において自動変速機18の変速比を大きくすることによって同車両1の加速度が大きくなるため、その増大分によってバルブタイミング変更機構30の動作遅れに起因する車両加速度の低下分を補償することが可能になる。しかも、車両1の加速開始時におけるバルブタイミングVTが所定タイミングより遅角側のタイミングであるとき、すなわち車両1の加速度合いの低下を招き易いときには、その低下を抑えるべく、自動変速機18の変速比を増大させることができる。また車両1の加速開始時におけるバルブタイミングVTが所定タイミングであるときや同所定タイミングより進角側のタイミングであるとき、すなわち車両1の加速度合いの低下を招き難いときには、自動変速機18の変速比を増大させる処理が実行されない。このように本実施の形態によれば、上述したバルブタイミング変更機構30の動作遅れ時間のばらつきに応じたかたちで車両加速度の低下分を的確に補うことができる。したがって、バルブタイミング変更機構30の動作遅れ時間にばらつきがあるとはいえ、安定した車両1の加速性能を得ることができるようになる。
【0045】
以下、自動変速機18の変速比を増大させる処理を含む車両1の加速時において実行される処理(加速時制御処理)について詳しく説明する。
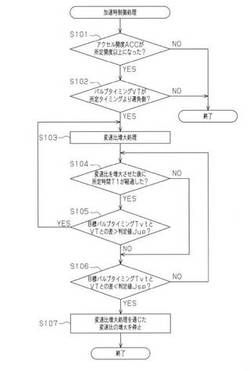
図4に上記加速時制御処理の実行手順を示す。なお同図のフローチャートに示される一連の処理は上記加速時制御処理の実行手順を概念的に示したものであり、実際の処理は所定周期毎の割り込み処理として電子制御装置60により実行される。
【0046】
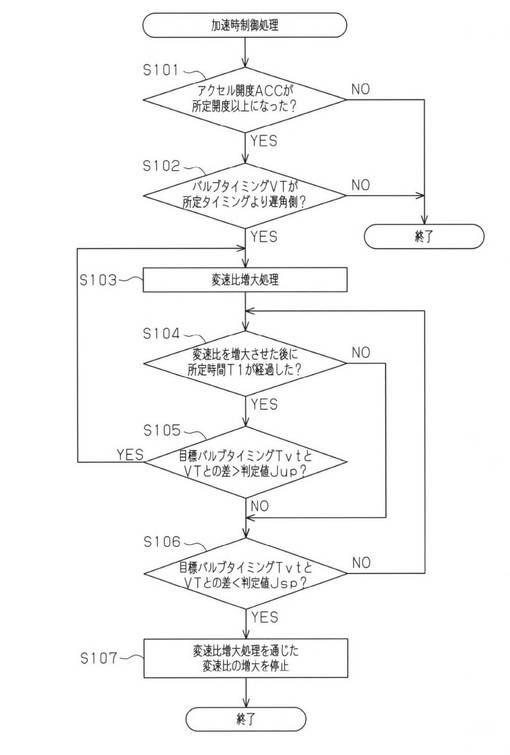
図4に示すように、この処理では先ず、以下の[条件イ]および[条件ロ]が共に満たされるか否かが判断される(ステップS101およびステップS102)。
[条件イ]アクセル開度ACCが予め定められた所定開度(例えば、60%開度)未満の状態から同所定開度以上の状態になったこと(ステップS101)。
[条件ロ]バルブタイミングVTが前記所定タイミングより遅角側のタイミングであること(ステップS102)。
【0047】
そして、[条件イ]および[条件ロ]が共に満たされる場合には(ステップS101:YES且つステップS102:YES)、バルブタイミング変更機構30の動作遅れに起因する車両加速度の低下を招くおそれがあるとして、自動変速機18の変速比を増大させる処理(変速比増大処理)が実行される(ステップS103)。
【0048】
上記[条件イ]が満たされることをもって、このとき車両1を加速させるべくアクセル操作部材26が操作されており、且つ目標バルブタイミングTvtとして制御可能範囲の中でも進角側のタイミングが設定されると判断される。また[条件ロ]が満たされることをもって、このときバルブタイミングVTがアトキンソンサイクルでの機関運転に際して設定されるタイミング、すなわちバルブタイミングVTの制御可能範囲における遅角側の限界に近いタイミングになっていると判断される。そして、これら[条件イ]および[条件ロ]が共に満たされることをもって、直後において車両加速度が大きくなる状況であり、且つ目標バルブタイミングTvtと実際のバルブタイミングVTとの差が大きくなる状況であると判断される。
【0049】
このときの変速比増大処理(ステップS103)においては具体的には、自動変速機18のプライマリプーリ21の目標回転速度Tprについての補正項Kprとして予め定められた一定の値(所定値A)が設定される。そして、以後においては、そのときどきの車両1の運転状態に基づき算出された目標回転速度Tprに補正項Kprを加算した値(=Tpr+Kpr)を新たな目標回転速度Tprとして設定するといったように、補正項Kprによって目標回転速度Tprを高い速度に補正する処理が実行される。こうした補正処理を実行することにより、プライマリプーリ21の実際の回転速度が高くなるように同プライマリプーリ21の有効径が大きくなるため、自動変速機18の変速比が大きくなる。なお本実施の形態では、車両加速度の不要な増加を抑えつつバルブタイミング変更機構30の動作遅れに起因する車両加速度の低下を適正に抑えることの可能な目標回転速度Tprの増大補正量が各種の実験やシミュレーションの結果をもとに予め求められるとともに、同増大補正量が上記所定値Aとして電子制御装置60に記憶されている。
【0050】
このように本実施の形態の装置では、車両1の加速開始時におけるバルブタイミングVTが所定タイミングより遅角側のタイミングであるとき、すなわち目標バルブタイミングTvtと実際のバルブタイミングVTとの差が大きくなるときに変速比増大処理が実行される。
【0051】
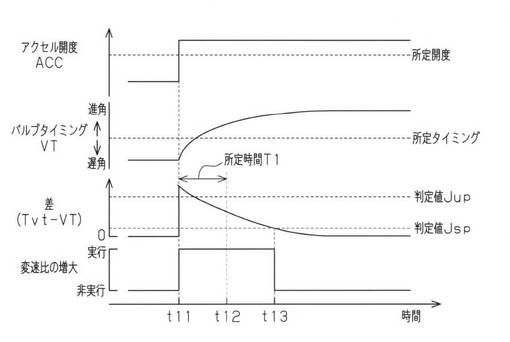
図5に、そうした場合における加速時制御処理の実行態様の一例を示す。
図5に示す例では、その時刻t11において、アクセル操作部材26が操作されてアクセル開度ACCが所定開度より大きくなると、目標バルブタイミングTvtが急変するのに対して実際のバルブタイミングVTが若干の遅れをもって変化するために、それら目標バルブタイミングTvtおよびバルブタイミングVTの差が大きくなる。
【0052】
本例では、アクセル操作部材26の操作時におけるバルブタイミングVTが所定タイミングより遅角側のタイミングであるために、バルブタイミング変更機構30の動作遅れに起因する車両加速度の低下が問題になるとして、自動変速機18の変速比を増大させるための処理が実行される。
【0053】
これにより、時刻t11以降においては、自動変速機18の変速比の増大によって車両加速度が大きくなるため、その増大分によってバルブタイミング変更機構30の動作遅れに起因する車両加速度の低下分を補償することができる。そのため、バルブタイミング変更機構30の動作遅れに起因する車両加速度の不要な低下が抑えられる。
【0054】
一方、図4に示すように、[条件イ]が満たされない場合や(ステップS101:NO)、[条件ロ]が満たされない場合には(ステップS102:NO)、変速比増大処理を実行することなく(ステップS103の処理がジャンプされて)、本処理は終了される。この場合には上記補正項Kprによる補正を実行することなく、車両1の運転状態に基づき算出された目標回転速度Tprをもとに自動変速機18の作動制御が実行される。
【0055】
[条件イ]が満たされない場合には、車両1を加速させるべくアクセル操作部材26が操作されていない、もしくは車両1を加速させるべくアクセル操作部材26が操作されたとはいえ操作後のアクセル開度ACCが小さいために目標バルブタイミングTvtがそれほど進角側のタイミングにならないと判断される。[条件ロ]が満たされない場合には、このときのバルブタイミングVTが比較的進角側のタイミングになっていると判断される。そして、これら[条件イ]および[条件ロ]のいずれかかが満たされないことをもって、目標バルブタイミングTvtと実際のバルブタイミングVTとの差が大きくなる可能性がごく低いために、バルブタイミング変更機構30の動作遅れに起因する車両加速度の低下を招く可能性もごく低いと判断される。
【0056】
このように本実施の形態の装置では、車両1の加速開始時におけるバルブタイミングVTが所定タイミングであるときや同所定タイミングより進角側のタイミングであるとき、すなわち目標バルブタイミングTvtと実際のバルブタイミングVTとの差が小さいときには変速比増大処理が実行されない。
【0057】
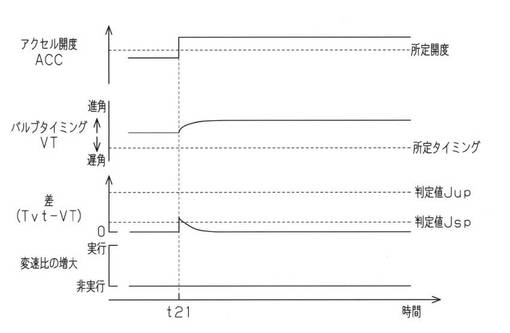
図6に、そうした場合における加速時制御処理の実行態様の一例を示す。
図6に示す例では、その時刻t21において、アクセル操作部材26が操作されてアクセル開度ACCが所定開度より大きくなると、目標バルブタイミングTvtの変化に対して実際のバルブタイミングVTの変化が若干遅れるために、それら目標バルブタイミングTvtおよびバルブタイミングVTに差が生じる。
【0058】
ただし本例では、アクセル操作部材26の操作時におけるバルブタイミングVTが所定タイミングより進角側のタイミングであるために上記差が小さく、同差に起因する車両加速度の低下度合いが小さいことから仮に車両加速度の低下を招いたとしてもさほど問題にならないとして、自動変速機18の変速比を増大させるための処理が実行されない。
【0059】
これにより、バルブタイミング変更機構30の動作遅れによる影響が殆ど無いのにもかかわらず自動変速機18の変速比が不要に増大されるといった状況になることが抑えられるために、車両加速度が不要に大きくなることを抑えることができる。
【0060】
このように本実施の形態の装置によれば、加速開始時におけるバルブタイミングVTと所定タイミングとの関係に基づき変速比増大処理の実行と非実行とのいずれかが選択されるために、安定した車両1の加速性能を得ることができるようになる。
【0061】
また本実施の形態では、そうした変速比増大処理の実行と非実行とのいずれかを選択するための閾値として所定タイミングが用いられる。この所定タイミングは、固定機構40によるバルブタイミングVTのロックや同ロックの解除を適正に行うために必要な値であるために、機関制御に用いる制御パラメータとして予め設定されて電子制御装置60に記憶されている。本実施の形態によれば、そうした制御パラメータを流用して変速比増大処理を実行するか否かの判断を行うことができるために、車両1の運転制御にかかる制御構造の構築にかかる作業の煩雑化や同制御構造の複雑化を抑えることができる。
【0062】
本実施の形態の加速時制御処理において、変速比増大処理が実行されると(図4のステ
ップS103)、同処理を通じて自動変速機18の変速比を増大させた後に所定時間T1が経過するまでの期間にわたり(ステップS104:NO)、目標バルブタイミングTvtと実際のバルブタイミングVTとの差が予め定められた判定値Jspより小さくなったか否かが判断される(ステップS106)。そして、目標バルブタイミングTvtと実際のバルブタイミングVTとの差が判定値Jspより小さくなったと判断されると(ステップS106:YES)、変速比増大処理を通じた自動変速機18の変速比の増大が停止された後(ステップS107)、本処理は終了される。
【0063】
図5に示す例では、その時刻t11以降において、バルブタイミングVTが進角側に変化するとともに、その変化に伴い目標バルブタイミングTvtおよびバルブタイミングVTの差が徐々に小さくなる。そして時刻t13において、目標バルブタイミングTvtおよびバルブタイミングVTの差が判定値Jspより小さくなると、同差が車両加速度に対する影響が殆どない程度に小さくなったとして、自動変速機18の変速比の増大が停止される。これにより、時刻t13以降においては補正項Kprによる補正を実行することなく、車両1の運転状態に基づき算出された目標回転速度Tprをもとに自動変速機18の作動制御が実行される。
【0064】
このように本実施の形態の装置によれば、バルブタイミング変更機構30の動作遅れに起因する目標バルブタイミングTvtと実際のバルブタイミングVTとのずれが適度に小さくなったタイミングで、変速比増大処理を通じた自動変速機18の変速比の増大を停止させることができる。
【0065】
なお本実施の形態の加速時制御処理(図4)において、目標バルブタイミングTvtと実際のバルブタイミングVTとの差が判定値Jspより小さくなる前に(ステップS106:NO)、上記変速比増大処理を通じて変速比を増大させた後の経過時間が所定時間T1に達すると(ステップS104:YES)、このときの上記差が予め定められた判定値Jup(ただし、判定値Jup>判定値Jsp)より大きいか否かが判断される(ステップS105)。
【0066】
そして、このときの上記差が判定値Jupより大きい場合には(ステップS105:YES)、変速比増大処理が再度実行される(ステップS103)。この場合、具体的には前記補正項Kprに前記所定値Aが加算される。そして、以後において、大きい値になった補正項Kprによって自動変速機18のプライマリプーリ21についての目標回転速度Tprを高い速度に補正する処理が実行される。これにより、目標回転速度Tprが所定値Aの分だけさらに高い速度に補正されるため、自動変速機18の変速比がさらに大きくなる。
【0067】
このように本実施の形態の装置によれば、変速比増大処理の実行後において目標バルブタイミングTvtと実際のバルブタイミングVTとの差が大きい状態が続いているとき、言い換えれば車両1の加速度が大きく低下している可能性が高いときに、自動変速機18の変速比をさらに増大させることによって車両加速度を上昇させることができる。そのため、車両加速度の低下を好適に抑えることができる。
【0068】
なお図5に示す例では、自動変速機18の変速比を増大させる処理の実行が開始された後に所定時間T1が経過したタイミング(時刻t12)において既に目標バルブタイミングTvtおよびバルブタイミングVTの差が判定値Jupを下回っているために、自動変速機18の変速比をさらに増大させる処理は実行されない。
【0069】
以上説明したように、本実施の形態によれば、以下に記載する効果が得られるようになる。
(1)車両1の加速走行時に同車両1の定常走行時と比較して自動変速機18の変速比を増大させる処理を、車両1の加速開始時におけるバルブタイミングVTが所定タイミングより遅角側のタイミングであるときには実行する一方、同所定タイミングであるときや所定タイミングより進角側のタイミングであるときには実行しないようにした。そのため、バルブタイミング変更機構30の動作遅れ時間にばらつきがあるとはいえ、安定した車両1の加速性能を得ることができる。
【0070】
(2)吸気カムシャフト17の相対回転位相がロック位相になるバルブタイミングVTである所定タイミングを、変速比増大処理の実行と非実行とのいずれかを選択するための閾値として用いるようにした。そのため、機関制御に用いる値として予め設定されている制御パラメータを流用して変速比増大処理を実行するか否かの判断を行うことができ、車両1の運転制御にかかる制御構造の構築にかかる作業の煩雑化や同制御構造の複雑化を抑えることができる。
【0071】
(3)変速比増大処理を通じて自動変速機18の変速比を増大させた後において目標バルブタイミングTvtおよびバルブタイミングVTの差が判定値Jupより大きい状態が所定時間T1にわたって継続されたときに、自動変速機18の変速比をさらに増大させるようにした。そのため、車両加速度が大きく低下している可能性が高いときに、自動変速機18の変速比をさらに増大させることによって車両加速度を上昇させることができ、車両加速度の低下を好適に抑えることができる。
【0072】
(4)目標バルブタイミングTvtおよびバルブタイミングVTの差が判定値Jspより小さくなったときに、自動変速機18の変速比の増大を停止させるようにした。そのため、バルブタイミング変更機構30の動作遅れに起因する目標バルブタイミングTvtと実際のバルブタイミングVTとのずれが適度に小さくなったタイミングで、変速比増大処理を通じた自動変速機18の変速比の増大を停止させることができる。
【0073】
なお、上記実施の形態は、以下のように変更して実施してもよい。
・上記実施の形態では車両1を加速させるべくアクセル操作部材26が操作されたことを判断するための条件として[条件イ](図4のステップS101)を設定したが、例えば[条件ハ]や[条件ニ]を設定するなど、車両1の加速開始を判断することのできる条件であれば、[条件イ]に代えて任意の条件を設定することができる。
[条件ハ]アクセル開度ACCの拡大速度が所定速度以上になったこと。
[条件ニ]要求吸入空気量Tgaの増加速度が所定速度以上になったこと。
【0074】
・上記実施の形態では、加速時制御処理における変速比増大処理(図4のステップS103の処理)として、目標回転速度Tprについての補正項Kprとして予め定められた一定値(所定値A)を設定するようにした。これに代えて、補正項Kprとして、車両1の加速開始時におけるバルブタイミングVTが所定タイミングより遅角側のタイミングであるときほど連続的に大きくなる値を設定したり、段階的に大きくなる値を設定したりしてもよい。同装置によれば、車両1の加速開始時におけるバルブタイミングVTが所定タイミングより遅角側のタイミングであるときほど、すなわちバルブタイミング変更機構30の動作遅れに起因する車両加速度の低下分が多くなるときほど、自動変速機18の変速比を大きくすることによる車両加速度の増加分を多くすることができる。そのため、車両加速度についての上記増加分による上記低下分の補償を的確に行うことができる。
【0075】
・車両1の加速開始時におけるバルブタイミングVTが所定タイミングであるときや同所定タイミングより進角側の位相であるときにおいて、以下の[条件ホ]が満たされるのであれば、自動変速機18の変速比を増大させる処理を実行するようにしてもよい。
[条件ホ]車両1の加速開始時におけるバルブタイミングVTが所定タイミングより遅角側の位相であるときの補正項Kprと比較して、車両1の加速開始時におけるバルブタイミングVTが所定タイミングであるときや同所定タイミングより進角側の位相であるときの補正項Kprが小さい値になる。
【0076】
こうした装置によれば、車両1の加速開始時におけるバルブタイミングVTが遅角側のタイミングであるとき(車両1の加速度合いの低下を招き易いとき)に、進角側のタイミングであるとき(車両1の加速度合いの低下を招き難いとき)と比較して、自動変速機18の変速比を増大させる度合いを大きくすることができる。したがって、上述したバルブタイミング変更機構30の動作遅れ時間に起因する車両加速度の低下分を的確に補うことができる。
【0077】
・自動変速機18の変速比を増大させる処理として、目標回転速度Tprについての補正項Kprを設定して同目標回転速度Tprを補正する処理を実行することに代えて、自動変速機18の変速比を増大させることの可能な処理であれば、任意の処理を実行することができる。そうした処理としては次のような処理が挙げられる。マップ演算を通じて目標回転速度Tprを算出するようにするとともに、演算用のマップとして変速比を増大させない通常時用のマップと変速比を増大させる増大時用のマップとを各別に設定する。そして、車両1の加速開始時におけるバルブタイミングVTが所定タイミングより遅角側のタイミングであるときには、通常時用のマップに代えて増大時用のマップを選択する。そして、その後において目標バルブタイミングTvtと実際のバルブタイミングVTとの差が判定値Jspより小さくなるまでの間、増大時用のマップに基づき目標回転速度Tprを算出する。また、目標バルブタイミングTvtと実際のバルブタイミングVTとの差が判定値Jspより小さくなった後や、車両1の加速開始時におけるバルブタイミングVTが所定タイミングより遅角側のタイミングであるときには、通常時用のマップを選択するとともに、同マップに基づき目標回転速度Tprを算出する。
【0078】
・車両1の加速開始時における吸気バルブ15のバルブタイミングが所定タイミングより遅角側のタイミングであることを、カムセンサ66によって検出されるバルブタイミングVTが所定タイミングより遅角側のタイミングであることをもって判断する(前記[条件ロ])ことに代えて、車両1の加速開始時や加速開始直前における同車両1の運転状態に基づき判断するようにしてもよい。こうした装置によれば、カムセンサ66により検出されるバルブタイミングVTを用いることなく、加速時制御処理を実行することができる。上記実施の形態の装置では、目標バルブタイミングTvtが要求吸入空気量Tgaおよび機関回転速度NEに基づき算出される。そのため、車両1の加速開始時における吸気バルブ15の実際のバルブタイミングは、同車両1の加速開始時における吸入空気量GA(あるいは加速開始直前における要求吸入空気量Tgaや吸入空気量GA)と機関回転速度NEとに基づいて精度良く推定することが可能である。この場合には、車両1の加速開始直前(あるいは加速開始時)における同車両1の運転状態が特定の運転状態(詳しくは、吸気バルブ15のバルブタイミングが所定タイミングより遅角側のタイミングになる運転状態)であったときに自動変速機18の変速比を増大させる処理を実行するといった構成を採用してもよい。こうした構成によっても、車両1の加速開始時における吸気バルブ15のバルブタイミングが所定タイミングより遅角側のタイミングであるときに自動変速機18の変速比を増大させる処理を実行するといった構成を実現することができる。
【0079】
・加速時制御処理のステップS104の処理とステップS105の処理とを省略してもよい。
・上記実施の形態では、自動変速機18の変速比の増大を停止させる条件として、「目標バルブタイミングTvtと実際のバルブタイミングVTとの差が判定値Jspより小さくなったこと」といった条件を採用した(図4のステップS106)。これに代えて、「バルブタイミングVTが所定タイミングになったこと」といった条件や「バルブタイミングVTが所定タイミングより進角側のタイミングになったこと」といった条件を採用することができる。
【0080】
・上記実施の形態における所定タイミングとして、クランクシャフト16に対する吸気カムシャフト17の相対回転位相がロック位相になるバルブタイミングVTを設定することに限らず、バルブタイミングVTの制御可能範囲における進角側の制御限界と遅角側の制御限界とを除く任意のタイミングを設定することができる。
【0081】
・上記実施の形態にかかる車両制御装置は、固定機構40が設けられていない内燃機関にも適用することができる。
・上記実施の形態にかかる車両制御装置は、ベルト式の無段変速機が搭載された車両に限らず、他の方式(例えばトロイダル式)の無段変速機が搭載された車両や、複数の変速段を車両の運転状態に応じて自動的に切り換える多段変速機が搭載された車両にも適用することができる。要は、車両の変速操作を自動的に行う自動変速機が搭載された装置であれば、上記実施の形態にかかる車両制御装置はその構成を適宜変更したうえで適用することができる。なお、多段式の自動変速機が搭載された車両に上記実施の形態にかかる車両制御装置を適用する場合には、次のように自動変速機の変速比を増大させるようにすればよい。すなわち、車両の加速走行時にそうでないときと比較して自動変速機の変速段を低速側の低い変速段に設定することによって同自動変速機の変速比を増大させるとともに、このときの変速段を、車両の加速開始時における吸気バルブのバルブタイミングが遅角側のタイミングであるときに進角側のタイミングであるときと比較して低い変速段に設定する。こうした装置によっても、上記実施の形態に準じた作用効果を得ることができる。
【0082】
・本発明は、アトキンソンサイクルでの機関運転が実行されない内燃機関が搭載された車両にも適用可能である。
【符号の説明】
【0083】
1…車両、10…内燃機関、11…吸気通路、12…スロットルバルブ、13…スロットルモータ、14…燃焼室、15…吸気バルブ、16…クランクシャフト、17…吸気カムシャフト、18…自動変速機、19…車軸、20…車輪、21…プライマリプーリ、22…セカンダリプーリ、23…ベルト、24…オイルポンプ、25…オイルパン、26…アクセル操作部材、30…バルブタイミング変更機構、31…可動部材、32…ケース、33…突部、34…ベーン、35…進角側油圧室、36…遅角側油圧室、40…固定機構、41…収容孔、41a…段部、42…ロックピン、42a…段部、43…コイルばね、44…解除用圧力室、45…ロック穴、50…オイルコントロールバルブ、51…供給通路、52…排出通路、53…進角側油路、54…遅角側油路、55…ロック油路、60…電子制御装置、61…車速センサ、62…アクセルセンサ、63…スロットルセンサ、64…回転速度センサ、65…吸気量センサ、66…カムセンサ。
【技術分野】
【0001】
本発明は、吸気バルブのバルブタイミングを変更するバルブタイミング変更機構と車両運転状態に応じて変速比を変更する自動変速機とを備える車両制御装置に関するものである。
【背景技術】
【0002】
近年、車両の変速操作を自動的に行うための自動変速機を同車両に搭載することが多用されている。こうした車両では、車両運転状態(例えばアクセル開度や車両走行速度)に基づき自動変速機の作動が制御されて、同自動変速機の変速比が車両運転状態に応じたかたちで自動的に調節される。
【0003】
また、駆動源として車両に搭載された内燃機関に、吸気バルブのバルブタイミングを変更するためのバルブタイミング変更機構を取り付けることが実用されている。こうした装置では、機関運転状態(例えば吸入空気量や機関回転速度)に基づいてバルブタイミングについての制御目標値が算出されるとともに、その制御目標値とバルブタイミングの実際値とが一致するようにバルブタイミング変更機構の作動が制御される。これにより、吸気バルブのバルブタイミングが機関運転状態に見合うタイミングに設定される。こうしたバルブタイミング変更機構の作動制御を通じて設定される吸気バルブのバルブタイミングは基本的に、内燃機関の出力トルクの要求値が大きいときほど進角側のタイミングになる。
【0004】
さらに特許文献1には、自動変速機が設けられた車両において、高い加速性能を得るべく、車両の加速に際して変速機構の変速比を一時的に増大させる処理を実行する装置が提案されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−129875号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
通常、バルブタイミング変更機構の作動制御においてバルブタイミングの制御目標値が変更された場合、その後においてバルブタイミングの実際値と制御目標値とが一致するようになるまでに若干の遅れがある。そして、この動作遅れ時間は、一定ではなく、制御目標値の変更時における同制御目標値と実際値との差に応じて異なる。
【0007】
そのため車両の加速に際して、動作遅れ時間が長い状況においては実際値が制御目標値より遅角側のタイミングになる状態が長く続くために車両加速度の低下を招く可能性が高いのに対して、動作遅れ時間が短い状況においては実際値が制御目標値より遅角側のタイミングになる状態が短いために車両加速度の低下を招く可能性は低くなる。
【0008】
このように特許文献1に記載の装置は、バルブタイミング変更機構の動作遅れに起因して車両の加速度が不安定化することが避けられず、この点において改善の余地がある。
本発明は、そうした実情に鑑みてなされたものであり、その目的は、安定した加速性能を得ることのできる車両制御装置を提供することにある。
【課題を解決するための手段】
【0009】
以下、上記目的を達成するための手段及びその作用効果について説明する。
請求項1に記載の装置は、車両の変速操作を自動的に行う自動変速機と、車両の駆動源としての内燃機関の吸気バルブのバルブタイミングを変更するバルブタイミング変更機構とを備える。そして、車両の運転状態に基づく自動変速機の作動制御と内燃機関の運転状態に基づくバルブタイミング変更機構の作動制御とが実行される。
【0010】
車両加速の開始時における吸気バルブのバルブタイミングが遅角側のタイミングであるときほど、バルブタイミング変更機構の作動制御におけるバルブタイミングの制御目標値と実際値との差が大きくなる可能性が高く、同バルブタイミング変更機構の動作遅れ時間が長くなり易いために、車両加速度の低下を招き易いと云える。また、自動変速機が搭載された車両では、同自動変速機の変速比を大きくすることによって車両の加速度を大きくすることができる。
【0011】
上記装置では、自動変速機の作動制御が、車両の加速走行時にそうでないとき(例えば定常走行時)と比較して自動変速機の変速比を増大させるとともに、車両加速の開始時における吸気バルブのバルブタイミングが遅角側のタイミングであるときに進角側のタイミングであるときと比較して上記変速比を増大させる度合いを大きくするといったように実行される。そのため、車両加速時において自動変速機の変速比を大きくすることによって、バルブタイミング変更機構の動作遅れに起因する車両加速度の低下分を補償することが可能になる。しかも、車両加速度の低下を招き易いときに同低下を招き難いときと比較して自動変速機の変速比を増大させる度合いを大きくすることができるために、上述したバルブタイミング変更機構の動作遅れ時間のばらつきに応じたかたちで車両加速度の低下分を的確に補うことができる。したがって、バルブタイミング変更機構の動作遅れ時間にばらつきがあるとはいえ、安定した車両の加速性能を得ることができるようになる。
【0012】
上記装置では、前述したように車両加速の開始時におけるバルブタイミングの制御目標値と実際値との差が大きいときにおいて車両加速度の不要な低下が問題になるものの、上記差が小さいときにはバルブタイミング変更機構の動作遅れ時間が短いために車両加速度の低下度合いが小さく、その低下がさほど問題にならない。
【0013】
請求項2に記載の装置では、加速開始時におけるバルブタイミングがその進角側の制御限界と遅角側の制御限界との間の所定タイミングより遅角側のタイミングであるとき、すなわちバルブタイミングの制御目標値と実際値との差が大きくなるときには、自動変速機の変速比が増大される。そのため、このときにはバルブタイミング変更機構の動作遅れに起因する車両加速度の不要な低下を抑えることができる。しかも、加速開始時におけるバルブタイミングが所定タイミングであるときや同所定タイミングより進角側のタイミングであるとき、すなわちバルブタイミングの制御目標値と実際値との差が小さいときには自動変速機の変速比が増大されないために、車両加速度が不要に大きくなることを抑えることができる。したがって上記装置によれば、安定した車両の加速性能を得ることができるようになる。
【0014】
バルブタイミング変更機構を備えた装置に、バルブタイミングの進角側の制御限界と遅角側の制御限界との間の所定タイミングで同バルブタイミングを固定する固定機構を設けることが提案されている。こうした装置では、固定機構によるバルブタイミングの固定や同固定の解除を適正に行うために、所定タイミングが制御パラメータとして予め設定されている。
【0015】
請求項3に記載の装置によれば、そうしたバルブタイミングを所定タイミングで固定する固定機構を備える装置において、同所定パラメータを流用して自動変速機の変速比を増大させるか否かの判断を行うことができる。そのため、この判断を行うタイミングを新たに設定する装置と比較して、車両の運転制御にかかる制御構造の構築にかかる作業の煩雑化や同制御構造の複雑化を抑えることができる。
【0016】
請求項4に記載の装置では、機関運転状態に基づきバルブタイミングの制御目標値が算出されるとともに同制御目標値と前記バルブタイミングの実際値とが一致するようにバルブタイミング変更機構の作動制御が実行される。そして、車両の加速時において自動変速機の変速比を増大させた後において前記制御目標値と前記実際値との差が予め定めた判定値より大きい状態が所定期間にわたって継続したときには前記変速比をさらに増大させるといったように、自動変速機の作動制御が実行される。
【0017】
同装置によれば、前記制御目標値と実際値との差が大きい状態が続いているとき、言い換えれば車両の加速度が大きく低下している可能性が高いときに、自動変速機の変速比をさらに増大させることによって車両加速度を上昇させることができるため、車両加速度の低下を好適に抑えることができる。
【0018】
請求項5に記載の装置では、機関運転状態に基づいて吸気バルブのバルブタイミングの制御目標値が算出されるとともに、同制御目標値とバルブタイミングの実際値とが一致するようにバルブタイミング変更機構の作動制御が実行される。そして、バルブタイミングの制御目標値と実際値との差が予め定めた判定値より小さくなったときに、車両加速時における自動変速機の変速比の増大が停止される。同装置によれば、バルブタイミング変更機構の動作遅れに起因するバルブタイミングの制御目標値と実際値とのずれが適度に小さくなったタイミングで、車両加速度の不要な低下を抑えるための自動変速機の変速比の増大を停止させることができる。
【図面の簡単な説明】
【0019】
【図1】本発明を具体化した一実施の形態にかかる車両制御装置の概略構成を示す略図。
【図2】バルブタイミング変更機構の概略構成を示す略図。
【図3】固定機構の概略構成を示す略図。
【図4】加速時制御処理の実行手順を示すフローチャート。
【図5】加速時制御処理の実行態様の一例を示すタイミングチャート。
【図6】加速時制御処理の実行態様の他の例を示すタイミングチャート。
【発明を実施するための形態】
【0020】
以下、本発明を具体化した一実施の形態にかかる車両制御装置について説明する。
図1に示すように、車両1には車両駆動源としての内燃機関10が搭載されている。内燃機関10の吸気通路11にはスロットルバルブ12が設けられている。スロットルバルブ12には、スロットルモータ13が連結されている。そして、このスロットルモータ13の作動制御を通じてスロットルバルブ12の開度(スロットル開度TA)が調節され、これにより吸気通路11を通じて燃焼室14内に吸入される空気の量(吸入空気量GA)が調節される。内燃機関10において吸気通路11と燃焼室14との間は吸気バルブ15の開閉動作によって連通・遮断される。この吸気バルブ15はクランクシャフト16の回転が伝達される吸気カムシャフト17の回転に伴って開閉動作する。
【0021】
内燃機関10のクランクシャフト16は自動変速機18を介して車軸19および車輪20に連結されている。自動変速機18としては、内燃機関10のクランクシャフト16に連結されたプライマリプーリ21と上記車軸19に連結されたセカンダリプーリ22とそれらプーリ21,22に巻き掛けられたベルト23とを備えたベルト式の無段変速機が採用されている。本実施の形態では、車両1の運転状態に基づく自動変速機18の作動制御を通じて同車両1の変速操作が自動的に行われるようになっている。
【0022】
内燃機関10には吸気バルブ15の開閉時期(バルブタイミング)を変更するためのバルブタイミング変更機構30が設けられている。以下、このバルブタイミング変更機構30について説明する。
【0023】
図2に示すように、バルブタイミング変更機構30は、内燃機関10の吸気カムシャフト17に固定されて同吸気カムシャフト17ともども回転する可動部材31と、この可動部材31を囲むように設けられて上記内燃機関10のクランクシャフト16(図1参照)の回転が伝達されるケース32とを備えている。ケース32は、上記可動部材31と同一の回転軸で回転するように配設されている。またケース32の内周面には、吸気カムシャフト17の軸線L1に向かって突出する突部33が周方向において所定の間隔をおいて複数(本実施の形態では、四つ)形成されている。一方、可動部材31の外周面には、吸気カムシャフト17の軸線L1から離間する方向に突出する複数(本実施の形態では、四つ)のベーン34がそれぞれ上記各突部33の間に位置するように形成されている。これにより、ケース32内における各突部33の間に位置する部分が、ベーン34によって進角側油圧室35と遅角側油圧室36とに区画されている。
【0024】
そして、進角側油圧室35にオイルを供給するとともに遅角側油圧室36からオイルを排出すると、可動部材31がケース32に対して一方向(図2における右回転方向)に回転して吸気カムシャフト17のクランクシャフト16に対する相対回転位相が進角側(回転方向前側)に変化する。これにより、吸気カムシャフト17によって開閉駆動される吸気バルブ15のバルブタイミングが進角側に変化するようになる。また、遅角側油圧室36にオイルを供給するとともに進角側油圧室35からオイルを排出すると、可動部材31がケース32に対して一方向(図2における左回転方向)に回転して吸気カムシャフト17のクランクシャフト16に対する相対回転位相が遅角側(回転方向後側)に変化する。それによって吸気バルブ15のバルブタイミングが遅角側に変化するようになる。
【0025】
バルブタイミング変更機構30には、内燃機関10の始動に際して吸気カムシャフト17の相対回転を規制する固定機構40が設けられている。以下、この固定機構40について説明する。
【0026】
図2または図3に示すように、前記可動部材31のベーン34の一つには、吸気カムシャフト17の軸線L1と平行に延びる段付きの収容孔41が形成されている。この収容孔41の内部にはロックピン42が出没可能に配設されている。ロックピン42は、その段部42aの外周面が上記収容孔41の内周面に摺接した状態で吸気カムシャフト17の軸線L1方向に移動可能になっている。またロックピン42は、その先端部分が収容孔41から脱出する方向(図3における右側)にコイルばね43によって付勢されている。ロックピン42の端部には拡径された形状の上記段部42aが形成されており、この段部42aと上記収容孔41の段部41aとの間には環状の空間である解除用圧力室44が形成されている。解除用圧力室44にオイルを供給すると、同オイルの圧力によって付勢されることにより、ロックピン42がコイルばね43の付勢力に抗して収容孔41内に没入する方向(図3における右側)に移動するようになる。また、解除用圧力室44内のオイルを排出すると、コイルばね43の付勢力によってロックピン42が収容孔41から脱出する方向に移動するようになる。
【0027】
一方、ケース32には、ロックピン42の先端部分を挿入可能な凹部としてのロック穴45が形成されている。ロック穴45の形成位置は、クランクシャフト16(図1参照)に対する吸気カムシャフト17の相対回転位相がその制御可能範囲における進角側の制御限界(最も進角側の位相)と遅角側の制御限界(最も遅角側の位相)との間の中間位相である所定のロック位相になったときにおいてロックピン42の先端部分が挿入可能になる位置に設定されている。なお、このロック位相としては、内燃機関10の始動に適した位相が設定されている。そして、このロック穴45の内部にロックピン42の先端部分が挿入されることにより、バルブタイミング変更機構30のベーン34がケース32に機械的に締結される。これにより、内燃機関10のクランクシャフト16に対する吸気カムシャフト17の相対回転位相が上記ロック位相で固定(ロック)されるようになる。
【0028】
吸気カムシャフト17の相対回転位相がロック位相になった状態で解除用圧力室44内のオイルを排出することにより、ロックピン42の先端部分がロック穴45に挿入されて固定機構40がロック状態になる。一方、ロック状態であるときに解除用圧力室44にオイルを供給することにより、ロックピン42がロック穴45から脱出して固定機構40が解除状態になる。
【0029】
図2に示すように、内燃機関10には、バルブタイミング変更機構30および固定機構40にオイルを圧送するためのオイルポンプ24が設けられている。また、バルブタイミング変更機構30や固定機構40とオイルポンプ24とを繋ぐ油圧回路にはオイルコントロールバルブ50が設けられている。そして、このオイルコントロールバルブ50の作動制御を通じて、バルブタイミング変更機構30の進角側油圧室35および遅角側油圧室36や固定機構40の解除用圧力室44へのオイルの給排態様が制御される。
【0030】
オイルコントロールバルブ50は、オイルを貯留するためのオイルパン25に供給通路51を介して接続されている。この供給通路51の途中には上記オイルポンプ24が設けられている。そして、このオイルポンプ24によって圧送されたオイルが供給通路51を通じてオイルコントロールバルブ50に供給されるようになっている。また、オイルコントロールバルブ50は、排出通路52を介してオイルパン25に接続されている。この排出通路52を通じてオイルコントロールバルブ50内のオイルをオイルパン25に戻すことが可能になっている。
【0031】
一方、オイルコントロールバルブ50は、進角側油路53を介してバルブタイミング変更機構30の進角側油圧室35に接続されるとともに、遅角側油路54を介して同機構30の遅角側油圧室36に接続されている。また、オイルコントロールバルブ50はロック油路55を介して固定機構40の解除用圧力室44に接続されている。
【0032】
図1または図2に示すように、車両1には、同車両1の運転状態や内燃機関10の運転状態を検出するための各種センサが取り付けられている。
各種センサとしては、例えば車両1の走行速度(車速SPD)を検出するための車速センサ61や、アクセル操作部材26(具体的には、アクセルペダル)の操作量(アクセル開度ACC)を検出するためのアクセルセンサ62が取り付けられている。また、スロットル開度TAを検出するためのスロットルセンサ63や、内燃機関10のクランクシャフト16の回転速度(機関回転速度NE)を検出するための回転速度センサ64、吸入空気量GAを検出するための吸気量センサ65が取り付けられている。その他、吸気バルブ15のバルブタイミング(バルブタイミングVT)を検出するためのカムセンサ66なども取り付けられている。
【0033】
また車両1には、例えばマイクロコンピュータを備えて構成される電子制御装置60が取り付けられている。この電子制御装置60は、各種センサの検出信号を取り込むとともにそれら検出信号に基づき各種の演算を行い、その演算結果に基づいてスロットルモータ13や、自動変速機18、バルブタイミング変更機構30ならびに固定機構40(詳しくは、オイルコントロールバルブ50)の作動制御など、車両1の運転にかかる各種制御を実行する。
【0034】
そうした各種制御のうちの自動変速機18の作動制御は次のように実行される。すなわち先ず、アクセル開度ACCおよび車速SPDに基づいて自動変速機18のプライマリプーリ21の回転速度についての制御目標値(目標回転速度Tpr)が設定される。そして、この目標回転速度Tprと実際のプライマリプーリ21の回転速度とが一致するように、同プライマリプーリ21の有効径が調節される。本実施の形態では、こうした自動変速機18の作動制御を通じて同自動変速機18の変速比が車両1の運転状態に応じて自動的に且つ無段階に変更される。
【0035】
一方、スロットルモータ13の作動制御は次のように実行される。すなわち先ず、アクセル開度ACCおよび機関回転速度NEに基づいて吸入空気量GAについての制御目標値(要求吸入空気量Tga)が算出される。その後、要求吸入空気量Tgaおよび機関回転速度NEに基づいてスロットル開度TAについての制御目標値(目標スロットル開度Tta)が算出される。そして、この目標スロットル開度Ttaと実際のスロットル開度TAとが一致するようにスロットルモータ13の作動が制御される。
【0036】
他方、オイルコントロールバルブ50の作動制御は以下のように実行される。
内燃機関10の運転中においては、基本的に、固定機構40の解除用圧力室44内部にオイルが供給されるようにオイルコントロールバルブ50の作動が制御されて同固定機構40が解除状態にされる。また、上記要求吸入空気量Tgaおよび機関回転速度NEに基づいてバルブタイミングVTについての制御目標値(目標バルブタイミングTvt)が算出されるとともに、この目標バルブタイミングTvtと実際のバルブタイミングVTとが一致するようにオイルコントロールバルブ50の作動制御が実行される。こうしたオイルコントロールバルブ50の作動制御は、内燃機関10の燃焼室14内に吸入空気を効率よく導入することなどを目的に実行される。
【0037】
なお本実施の形態では、要求吸入空気量Tgaと機関回転速度NEとが共に中程度になる内燃機関10の中回転中負荷領域において、圧縮比より膨張比が大きい燃焼サイクル(いわゆるアトキンソンサイクル)での機関運転が実行される。具体的には、バルブタイミングVTを制御可能範囲における最も遅角側のタイミング(あるいは最も遅角側のタイミングに近いタイミング)に制御することにより、吸気バルブ15の閉弁時期が圧縮行程中の所定時期(具体的には、圧縮行程中期)に設定されてアトキンソンサイクルでの機関運転が実現される。このようにしてアトキンソンサイクルでの機関運転を行うことにより、圧縮比と膨張比とが等しい通常の燃焼サイクル(いわゆるオットーサイクル)での機関運転と比較して熱効率が高くなるため、燃費性能の向上が図られる。
【0038】
内燃機関10の運転停止過程や始動過程においては、吸気カムシャフト17の相対回転位相がロック位相になるように、且つ解除用圧力室44からオイルが排出されるように、オイルコントロールバルブ50の作動制御が実行される。これにより、内燃機関10の運転停止過程においては固定機構40による吸気カムシャフト17の相対回転位相のロック位相でのロックが適正に行われるようになる。また内燃機関10の始動過程においては吸気カムシャフト17の相対回転位相がロック位相(すなわち機関始動に適した位相)で保持されるため、同内燃機関10の始動が適正に行われるようになる。
【0039】
ここで、本実施の形態において採用されている油圧作動式のバルブタイミング変更機構30には動作遅れがある。すなわち内燃機関10の運転状態が変化して目標バルブタイミングTvtが変化すると、その後において目標バルブタイミングTvtと実際値(バルブタイミングVT)とが一致するようになるまでに若干の遅れがある。こうしたバルブタイミング変更機構30の動作遅れ時間は、一定ではなく、目標バルブタイミングTvtの変化時における同目標バルブタイミングTvtとバルブタイミングVTとの差が大きいときほどバルブタイミング変更機構30の動作遅れ時間は長くなるといったように、同差に応じて異なる。
【0040】
そのため車両1の加速に際して、上記動作遅れ時間が長い状況においては実際のバルブタイミングVTが目標バルブタイミングTvtより遅角側のタイミングになる状態が長く続くために車両1の加速度の低下を招く可能性が高い。これに対して、上記動作遅れ時間が短い状況においては実際のバルブタイミングVTが目標バルブタイミングTvtより遅角側のタイミングになる時間が短いために車両加速度の低下を招く可能性は低くなる。このように本実施の形態の装置では、バルブタイミング変更機構30の動作遅れに起因して車両1の加速度合いが不安定になるおそれがある。
【0041】
本実施の形態の装置では、アトキンソンサイクルでの機関運転を実現するべく、バルブタイミングVTの制御可能範囲が遅角側に広くなっている。詳しくは、アトキンソンサイクルでの機関運転が実行されない比較例の装置における制御可能範囲と比較して、吸気カムシャフト17の相対回転位相がロック位相より遅角側になる制御範囲の分だけ、バルブタイミングVTの制御可能範囲が広くなっている。したがって本実施の形態の装置は、上記比較例の装置よりも目標バルブタイミングTvtとバルブタイミングVTとの差が大きくなり易く、バルブタイミング変更機構30の動作遅れ時間が長くなり易いために、車両加速度の低下を招き易いと云える。
【0042】
アクセル操作部材26の操作を通じて車両1が加速される際には、要求吸入空気量Tgaの増加に伴って目標バルブタイミングTvtが進角側のタイミングに変化するため、加速開始時におけるバルブタイミングVTが遅角側のタイミングであるときほど、目標バルブタイミングTvtと実際のバルブタイミングVTとの差が大きくなる可能性が高い。そのため、バルブタイミング変更機構30の動作遅れ時間が長くなり易く、車両加速度の低下を招き易いと云える。その一方で、本実施の形態の装置では自動変速機18の変速比を大きくすることによって車両1の加速度を大きくすることができる。
【0043】
この点をふまえて本実施の形態の装置では、バルブタイミング変更機構30の動作遅れに起因する車両加速度の低下を抑えるために、車両1の加速走行時にそうでないとき(例えば定常走行時)と比較して自動変速機18の変速比を増大させるようにしている。詳しくは、自動変速機18の変速比を増大させる処理を、車両1の加速開始時におけるバルブタイミングVTが所定タイミングより遅角側のタイミングであるときには実行する一方、同所定タイミングであるときや所定タイミングより進角側のタイミングであるときには実行しないようにしている。なお所定タイミングとしては、吸気カムシャフト17の相対回転位相がロック位相になるバルブタイミングVTが設定される。
【0044】
車両1の加速時において自動変速機18の変速比を大きくすることによって同車両1の加速度が大きくなるため、その増大分によってバルブタイミング変更機構30の動作遅れに起因する車両加速度の低下分を補償することが可能になる。しかも、車両1の加速開始時におけるバルブタイミングVTが所定タイミングより遅角側のタイミングであるとき、すなわち車両1の加速度合いの低下を招き易いときには、その低下を抑えるべく、自動変速機18の変速比を増大させることができる。また車両1の加速開始時におけるバルブタイミングVTが所定タイミングであるときや同所定タイミングより進角側のタイミングであるとき、すなわち車両1の加速度合いの低下を招き難いときには、自動変速機18の変速比を増大させる処理が実行されない。このように本実施の形態によれば、上述したバルブタイミング変更機構30の動作遅れ時間のばらつきに応じたかたちで車両加速度の低下分を的確に補うことができる。したがって、バルブタイミング変更機構30の動作遅れ時間にばらつきがあるとはいえ、安定した車両1の加速性能を得ることができるようになる。
【0045】
以下、自動変速機18の変速比を増大させる処理を含む車両1の加速時において実行される処理(加速時制御処理)について詳しく説明する。
図4に上記加速時制御処理の実行手順を示す。なお同図のフローチャートに示される一連の処理は上記加速時制御処理の実行手順を概念的に示したものであり、実際の処理は所定周期毎の割り込み処理として電子制御装置60により実行される。
【0046】
図4に示すように、この処理では先ず、以下の[条件イ]および[条件ロ]が共に満たされるか否かが判断される(ステップS101およびステップS102)。
[条件イ]アクセル開度ACCが予め定められた所定開度(例えば、60%開度)未満の状態から同所定開度以上の状態になったこと(ステップS101)。
[条件ロ]バルブタイミングVTが前記所定タイミングより遅角側のタイミングであること(ステップS102)。
【0047】
そして、[条件イ]および[条件ロ]が共に満たされる場合には(ステップS101:YES且つステップS102:YES)、バルブタイミング変更機構30の動作遅れに起因する車両加速度の低下を招くおそれがあるとして、自動変速機18の変速比を増大させる処理(変速比増大処理)が実行される(ステップS103)。
【0048】
上記[条件イ]が満たされることをもって、このとき車両1を加速させるべくアクセル操作部材26が操作されており、且つ目標バルブタイミングTvtとして制御可能範囲の中でも進角側のタイミングが設定されると判断される。また[条件ロ]が満たされることをもって、このときバルブタイミングVTがアトキンソンサイクルでの機関運転に際して設定されるタイミング、すなわちバルブタイミングVTの制御可能範囲における遅角側の限界に近いタイミングになっていると判断される。そして、これら[条件イ]および[条件ロ]が共に満たされることをもって、直後において車両加速度が大きくなる状況であり、且つ目標バルブタイミングTvtと実際のバルブタイミングVTとの差が大きくなる状況であると判断される。
【0049】
このときの変速比増大処理(ステップS103)においては具体的には、自動変速機18のプライマリプーリ21の目標回転速度Tprについての補正項Kprとして予め定められた一定の値(所定値A)が設定される。そして、以後においては、そのときどきの車両1の運転状態に基づき算出された目標回転速度Tprに補正項Kprを加算した値(=Tpr+Kpr)を新たな目標回転速度Tprとして設定するといったように、補正項Kprによって目標回転速度Tprを高い速度に補正する処理が実行される。こうした補正処理を実行することにより、プライマリプーリ21の実際の回転速度が高くなるように同プライマリプーリ21の有効径が大きくなるため、自動変速機18の変速比が大きくなる。なお本実施の形態では、車両加速度の不要な増加を抑えつつバルブタイミング変更機構30の動作遅れに起因する車両加速度の低下を適正に抑えることの可能な目標回転速度Tprの増大補正量が各種の実験やシミュレーションの結果をもとに予め求められるとともに、同増大補正量が上記所定値Aとして電子制御装置60に記憶されている。
【0050】
このように本実施の形態の装置では、車両1の加速開始時におけるバルブタイミングVTが所定タイミングより遅角側のタイミングであるとき、すなわち目標バルブタイミングTvtと実際のバルブタイミングVTとの差が大きくなるときに変速比増大処理が実行される。
【0051】
図5に、そうした場合における加速時制御処理の実行態様の一例を示す。
図5に示す例では、その時刻t11において、アクセル操作部材26が操作されてアクセル開度ACCが所定開度より大きくなると、目標バルブタイミングTvtが急変するのに対して実際のバルブタイミングVTが若干の遅れをもって変化するために、それら目標バルブタイミングTvtおよびバルブタイミングVTの差が大きくなる。
【0052】
本例では、アクセル操作部材26の操作時におけるバルブタイミングVTが所定タイミングより遅角側のタイミングであるために、バルブタイミング変更機構30の動作遅れに起因する車両加速度の低下が問題になるとして、自動変速機18の変速比を増大させるための処理が実行される。
【0053】
これにより、時刻t11以降においては、自動変速機18の変速比の増大によって車両加速度が大きくなるため、その増大分によってバルブタイミング変更機構30の動作遅れに起因する車両加速度の低下分を補償することができる。そのため、バルブタイミング変更機構30の動作遅れに起因する車両加速度の不要な低下が抑えられる。
【0054】
一方、図4に示すように、[条件イ]が満たされない場合や(ステップS101:NO)、[条件ロ]が満たされない場合には(ステップS102:NO)、変速比増大処理を実行することなく(ステップS103の処理がジャンプされて)、本処理は終了される。この場合には上記補正項Kprによる補正を実行することなく、車両1の運転状態に基づき算出された目標回転速度Tprをもとに自動変速機18の作動制御が実行される。
【0055】
[条件イ]が満たされない場合には、車両1を加速させるべくアクセル操作部材26が操作されていない、もしくは車両1を加速させるべくアクセル操作部材26が操作されたとはいえ操作後のアクセル開度ACCが小さいために目標バルブタイミングTvtがそれほど進角側のタイミングにならないと判断される。[条件ロ]が満たされない場合には、このときのバルブタイミングVTが比較的進角側のタイミングになっていると判断される。そして、これら[条件イ]および[条件ロ]のいずれかかが満たされないことをもって、目標バルブタイミングTvtと実際のバルブタイミングVTとの差が大きくなる可能性がごく低いために、バルブタイミング変更機構30の動作遅れに起因する車両加速度の低下を招く可能性もごく低いと判断される。
【0056】
このように本実施の形態の装置では、車両1の加速開始時におけるバルブタイミングVTが所定タイミングであるときや同所定タイミングより進角側のタイミングであるとき、すなわち目標バルブタイミングTvtと実際のバルブタイミングVTとの差が小さいときには変速比増大処理が実行されない。
【0057】
図6に、そうした場合における加速時制御処理の実行態様の一例を示す。
図6に示す例では、その時刻t21において、アクセル操作部材26が操作されてアクセル開度ACCが所定開度より大きくなると、目標バルブタイミングTvtの変化に対して実際のバルブタイミングVTの変化が若干遅れるために、それら目標バルブタイミングTvtおよびバルブタイミングVTに差が生じる。
【0058】
ただし本例では、アクセル操作部材26の操作時におけるバルブタイミングVTが所定タイミングより進角側のタイミングであるために上記差が小さく、同差に起因する車両加速度の低下度合いが小さいことから仮に車両加速度の低下を招いたとしてもさほど問題にならないとして、自動変速機18の変速比を増大させるための処理が実行されない。
【0059】
これにより、バルブタイミング変更機構30の動作遅れによる影響が殆ど無いのにもかかわらず自動変速機18の変速比が不要に増大されるといった状況になることが抑えられるために、車両加速度が不要に大きくなることを抑えることができる。
【0060】
このように本実施の形態の装置によれば、加速開始時におけるバルブタイミングVTと所定タイミングとの関係に基づき変速比増大処理の実行と非実行とのいずれかが選択されるために、安定した車両1の加速性能を得ることができるようになる。
【0061】
また本実施の形態では、そうした変速比増大処理の実行と非実行とのいずれかを選択するための閾値として所定タイミングが用いられる。この所定タイミングは、固定機構40によるバルブタイミングVTのロックや同ロックの解除を適正に行うために必要な値であるために、機関制御に用いる制御パラメータとして予め設定されて電子制御装置60に記憶されている。本実施の形態によれば、そうした制御パラメータを流用して変速比増大処理を実行するか否かの判断を行うことができるために、車両1の運転制御にかかる制御構造の構築にかかる作業の煩雑化や同制御構造の複雑化を抑えることができる。
【0062】
本実施の形態の加速時制御処理において、変速比増大処理が実行されると(図4のステ
ップS103)、同処理を通じて自動変速機18の変速比を増大させた後に所定時間T1が経過するまでの期間にわたり(ステップS104:NO)、目標バルブタイミングTvtと実際のバルブタイミングVTとの差が予め定められた判定値Jspより小さくなったか否かが判断される(ステップS106)。そして、目標バルブタイミングTvtと実際のバルブタイミングVTとの差が判定値Jspより小さくなったと判断されると(ステップS106:YES)、変速比増大処理を通じた自動変速機18の変速比の増大が停止された後(ステップS107)、本処理は終了される。
【0063】
図5に示す例では、その時刻t11以降において、バルブタイミングVTが進角側に変化するとともに、その変化に伴い目標バルブタイミングTvtおよびバルブタイミングVTの差が徐々に小さくなる。そして時刻t13において、目標バルブタイミングTvtおよびバルブタイミングVTの差が判定値Jspより小さくなると、同差が車両加速度に対する影響が殆どない程度に小さくなったとして、自動変速機18の変速比の増大が停止される。これにより、時刻t13以降においては補正項Kprによる補正を実行することなく、車両1の運転状態に基づき算出された目標回転速度Tprをもとに自動変速機18の作動制御が実行される。
【0064】
このように本実施の形態の装置によれば、バルブタイミング変更機構30の動作遅れに起因する目標バルブタイミングTvtと実際のバルブタイミングVTとのずれが適度に小さくなったタイミングで、変速比増大処理を通じた自動変速機18の変速比の増大を停止させることができる。
【0065】
なお本実施の形態の加速時制御処理(図4)において、目標バルブタイミングTvtと実際のバルブタイミングVTとの差が判定値Jspより小さくなる前に(ステップS106:NO)、上記変速比増大処理を通じて変速比を増大させた後の経過時間が所定時間T1に達すると(ステップS104:YES)、このときの上記差が予め定められた判定値Jup(ただし、判定値Jup>判定値Jsp)より大きいか否かが判断される(ステップS105)。
【0066】
そして、このときの上記差が判定値Jupより大きい場合には(ステップS105:YES)、変速比増大処理が再度実行される(ステップS103)。この場合、具体的には前記補正項Kprに前記所定値Aが加算される。そして、以後において、大きい値になった補正項Kprによって自動変速機18のプライマリプーリ21についての目標回転速度Tprを高い速度に補正する処理が実行される。これにより、目標回転速度Tprが所定値Aの分だけさらに高い速度に補正されるため、自動変速機18の変速比がさらに大きくなる。
【0067】
このように本実施の形態の装置によれば、変速比増大処理の実行後において目標バルブタイミングTvtと実際のバルブタイミングVTとの差が大きい状態が続いているとき、言い換えれば車両1の加速度が大きく低下している可能性が高いときに、自動変速機18の変速比をさらに増大させることによって車両加速度を上昇させることができる。そのため、車両加速度の低下を好適に抑えることができる。
【0068】
なお図5に示す例では、自動変速機18の変速比を増大させる処理の実行が開始された後に所定時間T1が経過したタイミング(時刻t12)において既に目標バルブタイミングTvtおよびバルブタイミングVTの差が判定値Jupを下回っているために、自動変速機18の変速比をさらに増大させる処理は実行されない。
【0069】
以上説明したように、本実施の形態によれば、以下に記載する効果が得られるようになる。
(1)車両1の加速走行時に同車両1の定常走行時と比較して自動変速機18の変速比を増大させる処理を、車両1の加速開始時におけるバルブタイミングVTが所定タイミングより遅角側のタイミングであるときには実行する一方、同所定タイミングであるときや所定タイミングより進角側のタイミングであるときには実行しないようにした。そのため、バルブタイミング変更機構30の動作遅れ時間にばらつきがあるとはいえ、安定した車両1の加速性能を得ることができる。
【0070】
(2)吸気カムシャフト17の相対回転位相がロック位相になるバルブタイミングVTである所定タイミングを、変速比増大処理の実行と非実行とのいずれかを選択するための閾値として用いるようにした。そのため、機関制御に用いる値として予め設定されている制御パラメータを流用して変速比増大処理を実行するか否かの判断を行うことができ、車両1の運転制御にかかる制御構造の構築にかかる作業の煩雑化や同制御構造の複雑化を抑えることができる。
【0071】
(3)変速比増大処理を通じて自動変速機18の変速比を増大させた後において目標バルブタイミングTvtおよびバルブタイミングVTの差が判定値Jupより大きい状態が所定時間T1にわたって継続されたときに、自動変速機18の変速比をさらに増大させるようにした。そのため、車両加速度が大きく低下している可能性が高いときに、自動変速機18の変速比をさらに増大させることによって車両加速度を上昇させることができ、車両加速度の低下を好適に抑えることができる。
【0072】
(4)目標バルブタイミングTvtおよびバルブタイミングVTの差が判定値Jspより小さくなったときに、自動変速機18の変速比の増大を停止させるようにした。そのため、バルブタイミング変更機構30の動作遅れに起因する目標バルブタイミングTvtと実際のバルブタイミングVTとのずれが適度に小さくなったタイミングで、変速比増大処理を通じた自動変速機18の変速比の増大を停止させることができる。
【0073】
なお、上記実施の形態は、以下のように変更して実施してもよい。
・上記実施の形態では車両1を加速させるべくアクセル操作部材26が操作されたことを判断するための条件として[条件イ](図4のステップS101)を設定したが、例えば[条件ハ]や[条件ニ]を設定するなど、車両1の加速開始を判断することのできる条件であれば、[条件イ]に代えて任意の条件を設定することができる。
[条件ハ]アクセル開度ACCの拡大速度が所定速度以上になったこと。
[条件ニ]要求吸入空気量Tgaの増加速度が所定速度以上になったこと。
【0074】
・上記実施の形態では、加速時制御処理における変速比増大処理(図4のステップS103の処理)として、目標回転速度Tprについての補正項Kprとして予め定められた一定値(所定値A)を設定するようにした。これに代えて、補正項Kprとして、車両1の加速開始時におけるバルブタイミングVTが所定タイミングより遅角側のタイミングであるときほど連続的に大きくなる値を設定したり、段階的に大きくなる値を設定したりしてもよい。同装置によれば、車両1の加速開始時におけるバルブタイミングVTが所定タイミングより遅角側のタイミングであるときほど、すなわちバルブタイミング変更機構30の動作遅れに起因する車両加速度の低下分が多くなるときほど、自動変速機18の変速比を大きくすることによる車両加速度の増加分を多くすることができる。そのため、車両加速度についての上記増加分による上記低下分の補償を的確に行うことができる。
【0075】
・車両1の加速開始時におけるバルブタイミングVTが所定タイミングであるときや同所定タイミングより進角側の位相であるときにおいて、以下の[条件ホ]が満たされるのであれば、自動変速機18の変速比を増大させる処理を実行するようにしてもよい。
[条件ホ]車両1の加速開始時におけるバルブタイミングVTが所定タイミングより遅角側の位相であるときの補正項Kprと比較して、車両1の加速開始時におけるバルブタイミングVTが所定タイミングであるときや同所定タイミングより進角側の位相であるときの補正項Kprが小さい値になる。
【0076】
こうした装置によれば、車両1の加速開始時におけるバルブタイミングVTが遅角側のタイミングであるとき(車両1の加速度合いの低下を招き易いとき)に、進角側のタイミングであるとき(車両1の加速度合いの低下を招き難いとき)と比較して、自動変速機18の変速比を増大させる度合いを大きくすることができる。したがって、上述したバルブタイミング変更機構30の動作遅れ時間に起因する車両加速度の低下分を的確に補うことができる。
【0077】
・自動変速機18の変速比を増大させる処理として、目標回転速度Tprについての補正項Kprを設定して同目標回転速度Tprを補正する処理を実行することに代えて、自動変速機18の変速比を増大させることの可能な処理であれば、任意の処理を実行することができる。そうした処理としては次のような処理が挙げられる。マップ演算を通じて目標回転速度Tprを算出するようにするとともに、演算用のマップとして変速比を増大させない通常時用のマップと変速比を増大させる増大時用のマップとを各別に設定する。そして、車両1の加速開始時におけるバルブタイミングVTが所定タイミングより遅角側のタイミングであるときには、通常時用のマップに代えて増大時用のマップを選択する。そして、その後において目標バルブタイミングTvtと実際のバルブタイミングVTとの差が判定値Jspより小さくなるまでの間、増大時用のマップに基づき目標回転速度Tprを算出する。また、目標バルブタイミングTvtと実際のバルブタイミングVTとの差が判定値Jspより小さくなった後や、車両1の加速開始時におけるバルブタイミングVTが所定タイミングより遅角側のタイミングであるときには、通常時用のマップを選択するとともに、同マップに基づき目標回転速度Tprを算出する。
【0078】
・車両1の加速開始時における吸気バルブ15のバルブタイミングが所定タイミングより遅角側のタイミングであることを、カムセンサ66によって検出されるバルブタイミングVTが所定タイミングより遅角側のタイミングであることをもって判断する(前記[条件ロ])ことに代えて、車両1の加速開始時や加速開始直前における同車両1の運転状態に基づき判断するようにしてもよい。こうした装置によれば、カムセンサ66により検出されるバルブタイミングVTを用いることなく、加速時制御処理を実行することができる。上記実施の形態の装置では、目標バルブタイミングTvtが要求吸入空気量Tgaおよび機関回転速度NEに基づき算出される。そのため、車両1の加速開始時における吸気バルブ15の実際のバルブタイミングは、同車両1の加速開始時における吸入空気量GA(あるいは加速開始直前における要求吸入空気量Tgaや吸入空気量GA)と機関回転速度NEとに基づいて精度良く推定することが可能である。この場合には、車両1の加速開始直前(あるいは加速開始時)における同車両1の運転状態が特定の運転状態(詳しくは、吸気バルブ15のバルブタイミングが所定タイミングより遅角側のタイミングになる運転状態)であったときに自動変速機18の変速比を増大させる処理を実行するといった構成を採用してもよい。こうした構成によっても、車両1の加速開始時における吸気バルブ15のバルブタイミングが所定タイミングより遅角側のタイミングであるときに自動変速機18の変速比を増大させる処理を実行するといった構成を実現することができる。
【0079】
・加速時制御処理のステップS104の処理とステップS105の処理とを省略してもよい。
・上記実施の形態では、自動変速機18の変速比の増大を停止させる条件として、「目標バルブタイミングTvtと実際のバルブタイミングVTとの差が判定値Jspより小さくなったこと」といった条件を採用した(図4のステップS106)。これに代えて、「バルブタイミングVTが所定タイミングになったこと」といった条件や「バルブタイミングVTが所定タイミングより進角側のタイミングになったこと」といった条件を採用することができる。
【0080】
・上記実施の形態における所定タイミングとして、クランクシャフト16に対する吸気カムシャフト17の相対回転位相がロック位相になるバルブタイミングVTを設定することに限らず、バルブタイミングVTの制御可能範囲における進角側の制御限界と遅角側の制御限界とを除く任意のタイミングを設定することができる。
【0081】
・上記実施の形態にかかる車両制御装置は、固定機構40が設けられていない内燃機関にも適用することができる。
・上記実施の形態にかかる車両制御装置は、ベルト式の無段変速機が搭載された車両に限らず、他の方式(例えばトロイダル式)の無段変速機が搭載された車両や、複数の変速段を車両の運転状態に応じて自動的に切り換える多段変速機が搭載された車両にも適用することができる。要は、車両の変速操作を自動的に行う自動変速機が搭載された装置であれば、上記実施の形態にかかる車両制御装置はその構成を適宜変更したうえで適用することができる。なお、多段式の自動変速機が搭載された車両に上記実施の形態にかかる車両制御装置を適用する場合には、次のように自動変速機の変速比を増大させるようにすればよい。すなわち、車両の加速走行時にそうでないときと比較して自動変速機の変速段を低速側の低い変速段に設定することによって同自動変速機の変速比を増大させるとともに、このときの変速段を、車両の加速開始時における吸気バルブのバルブタイミングが遅角側のタイミングであるときに進角側のタイミングであるときと比較して低い変速段に設定する。こうした装置によっても、上記実施の形態に準じた作用効果を得ることができる。
【0082】
・本発明は、アトキンソンサイクルでの機関運転が実行されない内燃機関が搭載された車両にも適用可能である。
【符号の説明】
【0083】
1…車両、10…内燃機関、11…吸気通路、12…スロットルバルブ、13…スロットルモータ、14…燃焼室、15…吸気バルブ、16…クランクシャフト、17…吸気カムシャフト、18…自動変速機、19…車軸、20…車輪、21…プライマリプーリ、22…セカンダリプーリ、23…ベルト、24…オイルポンプ、25…オイルパン、26…アクセル操作部材、30…バルブタイミング変更機構、31…可動部材、32…ケース、33…突部、34…ベーン、35…進角側油圧室、36…遅角側油圧室、40…固定機構、41…収容孔、41a…段部、42…ロックピン、42a…段部、43…コイルばね、44…解除用圧力室、45…ロック穴、50…オイルコントロールバルブ、51…供給通路、52…排出通路、53…進角側油路、54…遅角側油路、55…ロック油路、60…電子制御装置、61…車速センサ、62…アクセルセンサ、63…スロットルセンサ、64…回転速度センサ、65…吸気量センサ、66…カムセンサ。
【特許請求の範囲】
【請求項1】
車両変速操作を自動的に行う自動変速機と車両駆動源としての内燃機関の吸気バルブのバルブタイミングを変更するバルブタイミング変更機構とを備えた車両に適用されて、車両運転状態に基づく前記自動変速機の作動制御と機関運転状態に基づく前記バルブタイミング変更機構の作動制御とを実行する車両制御装置において、
当該装置は、前記車両の加速走行時にそうでないときと比較して前記自動変速機の変速比を増大させるとともに、前記変速比を増大させる度合いを、前記車両の加速開始時における前記バルブタイミングが遅角側のタイミングであるときに進角側のタイミングであるときと比較して大きくするといったように前記自動変速機の作動制御を実行する
ことを特徴とする車両制御装置。
【請求項2】
請求項1に記載の車両制御装置において、
当該装置は、前記加速開始時における前記バルブタイミングがその進角側の制御限界と遅角側の制御限界との間の所定タイミングより遅角側のタイミングであるときには前記自動変速機の変速比を増大させる一方、前記加速開始時における前記バルブタイミングが前記所定タイミングであるときおよび同所定タイミングより進角側のタイミングであるときには前記自動変速機の変速比を増大させない、といったように前記自動変速機の作動制御を実行する
ことを特徴とする車両制御装置。
【請求項3】
請求項1または2に記載の車両制御装置において、
当該装置は、前記バルブタイミングを前記所定タイミングで固定する固定機構を備えてなる
ことを特徴とする車両制御装置。
【請求項4】
請求項1〜3のいずれか一項に記載の車両制御装置において、
当該装置は、
前記機関運転状態に基づき前記バルブタイミングの制御目標値を算出するとともに、同制御目標値と前記バルブタイミングの実際値とが一致するように前記バルブタイミング変更機構の作動制御を実行するものであり、
前記変速比を増大させた後において前記制御目標値と前記実際値との差が予め定めた判定値より大きい状態が所定期間にわたって継続したときに前記変速比をさらに増大させる、といったように前記自動変速機の作動制御を実行する
ことを特徴とする車両制御装置。
【請求項5】
請求項1〜4のいずれか一項に記載の車両制御装置において、
当該装置は、
前記機関運転状態に基づき前記バルブタイミングの制御目標値を算出するとともに、同制御目標値と前記バルブタイミングの実際値とが一致するように前記バルブタイミング変更機構の作動制御を実行するものであり、
前記制御目標値と前記実際値との差が予め定めた判定値より小さくなったときに前記変速比の増大を停止させる
ことを特徴とする車両制御装置。
【請求項1】
車両変速操作を自動的に行う自動変速機と車両駆動源としての内燃機関の吸気バルブのバルブタイミングを変更するバルブタイミング変更機構とを備えた車両に適用されて、車両運転状態に基づく前記自動変速機の作動制御と機関運転状態に基づく前記バルブタイミング変更機構の作動制御とを実行する車両制御装置において、
当該装置は、前記車両の加速走行時にそうでないときと比較して前記自動変速機の変速比を増大させるとともに、前記変速比を増大させる度合いを、前記車両の加速開始時における前記バルブタイミングが遅角側のタイミングであるときに進角側のタイミングであるときと比較して大きくするといったように前記自動変速機の作動制御を実行する
ことを特徴とする車両制御装置。
【請求項2】
請求項1に記載の車両制御装置において、
当該装置は、前記加速開始時における前記バルブタイミングがその進角側の制御限界と遅角側の制御限界との間の所定タイミングより遅角側のタイミングであるときには前記自動変速機の変速比を増大させる一方、前記加速開始時における前記バルブタイミングが前記所定タイミングであるときおよび同所定タイミングより進角側のタイミングであるときには前記自動変速機の変速比を増大させない、といったように前記自動変速機の作動制御を実行する
ことを特徴とする車両制御装置。
【請求項3】
請求項1または2に記載の車両制御装置において、
当該装置は、前記バルブタイミングを前記所定タイミングで固定する固定機構を備えてなる
ことを特徴とする車両制御装置。
【請求項4】
請求項1〜3のいずれか一項に記載の車両制御装置において、
当該装置は、
前記機関運転状態に基づき前記バルブタイミングの制御目標値を算出するとともに、同制御目標値と前記バルブタイミングの実際値とが一致するように前記バルブタイミング変更機構の作動制御を実行するものであり、
前記変速比を増大させた後において前記制御目標値と前記実際値との差が予め定めた判定値より大きい状態が所定期間にわたって継続したときに前記変速比をさらに増大させる、といったように前記自動変速機の作動制御を実行する
ことを特徴とする車両制御装置。
【請求項5】
請求項1〜4のいずれか一項に記載の車両制御装置において、
当該装置は、
前記機関運転状態に基づき前記バルブタイミングの制御目標値を算出するとともに、同制御目標値と前記バルブタイミングの実際値とが一致するように前記バルブタイミング変更機構の作動制御を実行するものであり、
前記制御目標値と前記実際値との差が予め定めた判定値より小さくなったときに前記変速比の増大を停止させる
ことを特徴とする車両制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−104466(P2013−104466A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−247663(P2011−247663)
【出願日】平成23年11月11日(2011.11.11)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月11日(2011.11.11)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]