
車両制御装置
【課題】不特定の場所で偶発的に発生し得る渋滞に対し、早期に渋滞の発生を抑制するため車群制御を行うことのできる技術を提供する。
【解決手段】先行車群内を走行している機能化車両(本発明の車両制御装置を搭載した車両)が、自車群内で全体的な速度低下が発生する等の渋滞の兆候を検知した場合、その場所を渋滞候補箇所として検出し、その渋滞候補箇所に関する渋滞候補情報を後続車群内の機能化車両に伝達する。後続車群内を走行している機能化車両は、先行車群の機能化車両からの渋滞候補情報を受信すると、その渋滞候補情報の内容と自車群の走行状況とに基づいて、当該渋滞候補箇所での渋滞を抑制するための自車群の走行方法に関する制御内容を決定し、その制御内容に従って自車群の走行を制御する。
【解決手段】先行車群内を走行している機能化車両(本発明の車両制御装置を搭載した車両)が、自車群内で全体的な速度低下が発生する等の渋滞の兆候を検知した場合、その場所を渋滞候補箇所として検出し、その渋滞候補箇所に関する渋滞候補情報を後続車群内の機能化車両に伝達する。後続車群内を走行している機能化車両は、先行車群の機能化車両からの渋滞候補情報を受信すると、その渋滞候補情報の内容と自車群の走行状況とに基づいて、当該渋滞候補箇所での渋滞を抑制するための自車群の走行方法に関する制御内容を決定し、その制御内容に従って自車群の走行を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の走行を制御して渋滞の発生を抑制する車両制御装置に関する。
【背景技術】
【0002】
従来、複数の車両が車群として走行する場合に、車群の走行を適切に制御する車両群制御システムが知られている(例えば、特許文献1参照)。具体的には、所定の制御領域内を走行する車群の各車両の走行状態を検出し、各々車両に対する目標速度/加速度を算出し、その結果を受信機能及び結果に従う制御機能を備えた各車両に伝達する。このようにすることで、特定の事故多発地帯や、渋滞多発地帯での事故や渋滞を緩和することできるとしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−59094号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術では、渋滞多発地帯や事故多発地帯に設定された特定の制御領域に予め設けられた固定の観測装置及び演算処理装置によって各車両に対する制御内容を決定している。そのため、あらかじめ想定された制御領域以外で発生し得る偶発的な渋滞などに対して対処することはできないという問題がある。
【0005】
本発明は、このような問題を解決するためになされたものであり、不特定の場所においても早期に渋滞の発生を抑制するため車群制御を行うことのできる技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
以下、本発明において採用した構成について説明する。
本発明の車両制御装置は、渋滞候補検出手段、伝達手段、取得手段、及び、車両制御手段を備える。渋滞候補検出手段は、自車両が備える検知手段により検知された自車両周辺の状況に基づき、渋滞に発展する兆候に関する検出条件に該当する道路上の渋滞候補箇所を検出する。伝達手段は、渋滞候補検出手段により渋滞候補箇所を検出した場合、その検出した渋滞候補箇所の位置を示す情報を含む渋滞候補情報を他車両あるいは外部装置に対して伝達する。なお、本発明では、渋滞候補情報が最終的に後続の車両に届くことを想定しているが、その伝達方法としては、無線通信を利用した車車間通信により後続車両に直接送信するものであってもよいし、外部のインフラとして設けられた通信設備を中継して、間接的に後続車両に伝達するものであってもよい。
【0007】
一方、取得手段は、他車両において生成され伝達された渋滞候補情報を取得する。渋滞候補情報の取得方法としては、無線通信を利用した車車間通信により送信元の先行車両から直接受信するものであってもよいし、外部のインフラとして設けられた通信設備を中継して、間接的に先行車両から取得するものであってもよい。そして、車両制御手段は、取得手段により自車両が走行中の道路の進路前方にある渋滞候補箇所に関する渋滞候補情報を取得した場合、自車両と自車両と同じ道路を同方向に進行する周辺車両とからなる自車群において、当該渋滞候補箇所での渋滞を抑制するための自車群の走行方法に関する制御内容を決定し、その決定した制御内容に従って自車群に対する車両制御を行う。
【0008】
このように構成された本発明によれば、自車両が走行している場所において渋滞に発展しそうな兆候を検出した場合、その渋滞候補箇所に関する渋滞候補情報を後続の車両に伝達できる。その一方で、先行する車両から前方の渋滞候補箇所に関する渋滞候補情報を取得した場合、自車両がその渋滞候補箇所付近を走行する際に、渋滞を抑制するように自車群の走行を制御することができる。自車群の走行制御としては、自車群において渋滞の発生を助長するような減速が起こらないように、例えば、自車群の各車両間の車間距離や速度を調節したり、車線変更により車線分布の集中を緩和することが挙げられる。
【0009】
本発明の車両制御装置を搭載した先行車両と後続車両とにおいて、先行車両が検出した渋滞候補情報に基づいて後続車両が渋滞抑制のために自車群の走行を制御する構成によれば、渋滞多発地帯に設定された特定の制御領域だけでなく、不特定の場所で偶発的に発生し得る渋滞に対して、早期に渋滞抑制のための行動をとることができる。これにより、従来技術における特定の制御領域に制限されることなく、広範囲にわたって渋滞を抑制できる。
【0010】
ところで、渋滞の発生しやすい条件としては、上り坂やサグ部(下り坂から上り坂への変化点)といった地形的条件に加え、工事による走行規制や落下物等の障害物といった不規則的あるいは偶発的条件もある。そのような条件の場所では渋滞の兆候として、例えば、特定の箇所で車群において一斉に減速が起こったり、車間距離が減少したり、ある車線を避ける動きをする等といった挙動が起きることが予想される。
【0011】
そこで、渋滞候補箇所の検出においては、請求項2に記載のように、自車両と自車両周辺の車両との相互の挙動の状態に基づいて行うように構成することが考えられる。より具体的には、請求項3に記載のように、自車両と周辺車両との車間距離又は相対速度の少なくとも何れかに基づく検出条件によって渋滞候補箇所を検出するように構成してもよい。このように、渋滞候補箇所の検出方法として、車間距離や相対速度といった自車両と周辺車両との相互の挙動の状態を捉えることで、不特定の場所で偶発的に発生し得る渋滞の兆候を的確に検出できる。
【0012】
さらに、請求項4に記載のように、渋滞候補箇所を検出した際、その検出された渋滞候補箇所における渋滞に発展する兆候の程度に応じて、要求される対処の程度を示す要対処レベルを決定し、その決定した要対処レベルに関する情報を更に含む渋滞候補情報を外部装置に対して伝達するように構成してもよい。このように構成することで、後続の車群において要対処レベルに応じた対策行動をとることができる。
【0013】
具体的には、請求項5に記載のように、取得した渋滞候補情報に含まれる要対処レベルに関する情報に基づき、渋滞候補箇所から要対処レベルに応じた所定距離手前の位置を基準に自車群に対する車両制御を開始するように構成するとよい。例えば、重度の渋滞に発展する可能性のある兆候か検知された場合(=要対処レベル高)には、渋滞候補箇所から十分に手前の距離から渋滞を抑制するための車両制御を開始し、軽度の渋滞に発展する兆候が検知された場合(=要対処レベル低)には、渋滞候補箇所からやや近い距離から渋滞を抑制するための車両制御を開始するといった区別をつけることができる。
【0014】
つぎに、車両制御装置が前方の渋滞候補箇所に対して行う車両制御の手順としては、請求項6に記載のように構成することが考えられる。すなわち、車両制御手段は、検知手段により自車両と自車両周辺の車両との相互の挙動の状況を検出し、その検出した状況に応じた渋滞抑制のための対策行動を逐次算出する。このようにすることで、自車群内の車間距離や相対速度等といった周辺状況の変化に応じて適切な対策行動を算出できる。
【0015】
さらに、請求項7に記載のように、自車両において実施するための前記対策行動、又は、自車群に属する他車両において実施させるための前記対策行動の少なくとも何れかを算出し、自車両において実施するための対策行動に従って自車両の走行を制御する一方、他車両において実施させるための対策行動に関する情報を当該他車両に対して伝達するように構成してもよい。このようにすることで、自車両だけの走行制御だけでなく、自車群内の他車両も制御対象とする速度調整や車線変更等といった制御内容を他車両に伝達し、それを他車両において実施させることで、自車群の隊列走行を効率的に制御できる。
【0016】
なお、他車両において実施させるための対策行動の伝達方法する場合、伝送対象となる他車両と自車両との間でデータ通信が可能であるか否かによって、必要となる対応が異なる。具体的には、他車両において実施させるための対策行動の伝達対象となる他車両が自車両と間でデータ通信を行う機能を有する場合、当該他車両において実施させるための対策行動に関する情報を、通信手段によるデータ通信により当該他車両に伝達するようにすればよい(請求項8)。
【0017】
一方、他車両において実施させるための対策行動の伝達対象となる他車両が自車両と間でデータ通信を行う機能を持たない場合、車車間通信による直接的な情報伝達ができないため、次のようにすることが考えられる。すなわち、他車両において実施させるための対策行動の伝達対象であって、自車両が備える通信手段により自車両と間でデータ通信を行う機能を持たない他車両に対して、自車両の走行状態の変化や特定の提示機器の作動制御による情報提示行動を行うことで、当該他車両の乗員に対して当該他車両において実施させるための対策行動に関する情報を伝達する。このように、自車両が行う情報提示行動によって、伝達対象の他車両の乗員に対して対策行動に関する情報を伝達することで、当該他車両の乗員に対して対策行動の実施を促すことができる。
【0018】
ところで、車両制御手段において決定した渋滞を抑制するための制御内容に関する情報を、例えば音声や表示等を用いる情報提示手段によって自車両の乗員に対して提示するように構成してもよい(請求項10)。このように構成することで、渋滞を抑制するための制御内容を自車両の乗員に把握させることができ、自発的な対策行動の実施を乗員に対して促すことができる。
【図面の簡単な説明】
【0019】
【図1】実施形態の車両制御装置の概略構成を示すブロック図である。
【図2】車両制御装置を搭載した車両による渋滞抑制動作の概要を模式的に示す説明図である。
【図3】メイン処理の手順を示すフローチャートである。
【図4】渋滞候補箇所を検出する手順を示すフローチャートである。
【図5】自車群の車両制御を行う手順を示すフローチャートである。
【発明を実施するための形態】
【0020】
以下、本発明の一実施形態を図面に基づいて説明する。なお、本発明は下記の実施形態に何ら限定されるものではなく様々な態様にて実施することが可能である。
[車両制御装置の構成の説明]
実施形態の車両制御装置の概略構成について、図1を参照しながら説明する。
【0021】
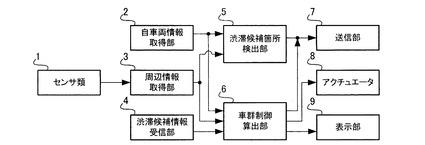
実施形態の車両制御装置は、センサ類1、自車両情報取得部2、周辺情報取得部3、渋滞候補情報受信部4、渋滞候補箇所検出部5、車群制御算出部6、送信部7、アクチュエータ8、及び、表示部9を備える車載電子制御装置である。
【0022】
センサ類1は、自車両周辺の状況を検知するためのレーダー、ソナー、カメラ等の各種の周辺監視センサである。自車両情報取得部2は、自車両に装備された各種機器から現在地、速度、加速度、ブレーキやアクセルのペダル操作量、エンジントルク、ステアリングの操舵角等といった自車両の走行状況に関する各種情報を取得する電子装置である。周辺情報取得部3は、センサ類1によって取得された検知情報に基づき、自車両と周辺車両との車間距離や相対速度、路面状態(障害物の有無)等の周辺情報を取得する電子装置である。
【0023】
渋滞候補情報受信部4は、他車両から伝達される渋滞候補情報を受信する通信装置である。具体的には、次のような構成が考えられる。例えば、自車両から数km〜数十km程度前方を走行する先行車両との車車間通信(電波・光による無線通信)により、先行車両から発信された渋滞候補情報を直接受信する。あるいは、先行車両において検出された渋滞候補情報を路側に設置された路側通信装置に一旦送信し、この路側通信装置との間の路車間通信によって間接的に渋滞候補情報を受信してもよい。あるいは、インターネットを経由したクラウドコンピューティングやサーバ連携を利用し、先行車両からインターネットを通じてサーバにアップロードされた渋滞候補情報を、無線通信端末等によるインターネット接続により受信する構成であってもよい。
【0024】
渋滞候補箇所検出部5は、自車両情報取得部2及び周辺情報取得部3から入力される検知情報に基づき、渋滞に発展する兆候に関する検出条件に該当する道路上の渋滞候補箇所を検出し、渋滞候補情報を生成してそれを外部に伝達する電子装置である。車群制御算出部6は、渋滞候補情報受信部4によって自車両の進路前方で先行車両により発信された渋滞候補情報を受信した条件下において、自車両情報取得部2及び周辺情報取得部3から入力される検知情報に基づき、当該渋滞候補箇所での渋滞の発生を回避・抑制するための自車群の最適な制御内容を算出する電子装置である。
【0025】
送信部7は、外部と情報通信を行うための通信装置である。この送信部7では、渋滞候補箇所検出部5において検出した渋滞候補箇所に関する渋滞候補情報を外部の後続車両や路側通信装置等に送信する他、車群制御算出部6において算出した制御内容で他車両において実施させるための対策行動に関する情報を当該他車両に送信する。
【0026】
アクチュエータ8は、車群制御算出部6において算出した制御内容に従って、アクセルやブレーキ、ステアリング、灯火、クラクション等といった各種車載機器類を作動させるアクチュエータである。表示部9は、車群制御算出部6において算出した制御内容に関する情報を運転者に対して提示するための表示装置である。
【0027】
[動作の概要]
つぎに、本実施形態の車両制御装置を搭載した車両(以下、機能化車両と称する。)による動作の概要について、図2を参照しながら説明する。
【0028】
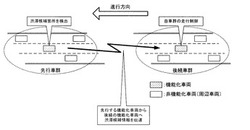
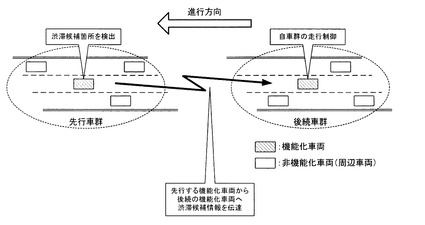
ここでは、図2に示す通り、矢印で示す進行方向に沿って同一道路上を走行する先行車群及び後続車群に、それぞれ本実施形態の車両制御装置を搭載した機能化車両が含まれており、その周辺に車両制御装置を搭載していない複数の非機能化車両(周辺車両)が走行している状況を想定する。
【0029】
このような状況下において先行車群内を走行している機能化車両が、例えば自車群内で全体的な速度低下が発生する等といった渋滞の兆候を検知した場合、その場所を渋滞候補箇所として検出し、その渋滞候補箇所に関する渋滞候補情報を後続車群内の機能化車両に伝達する。渋滞候補情報には、渋滞候補箇所の位置を示す情報や渋滞の兆候の程度を示す要対処レベルを示す情報等が含まれる。また、渋滞候補情報の伝達は、後続の機能化車両との車車間通信による直接送信や、路側通信装置を介した路車間通信による間接送信によって行う。
【0030】
後続車群内を走行している機能化車両は、先行車群の機能化車両からの渋滞候補情報を受信すると、その渋滞候補情報の内容と自車群の走行状況とに基づいて、当該渋滞候補箇所での渋滞を抑制するための自車群の走行方法に関する制御内容を決定し、その制御内容に従って自車群の走行を制御する。
【0031】
[メイン処理の説明]
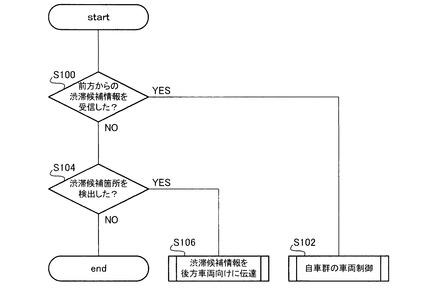
つぎに、実施形態の車両制御装置が実行するメイン処理の手順について、図3のフローチャートを参照しながら説明する。この処理は、車両の走行時において所定のサイクル(例えば1Hz)で繰返し実行される。
【0032】
このメイン処理では、大きく分けて2つの判断を行う。第一に、渋滞候補情報受信部4における車車間通信又は路車間通信によって、自車両が走行中の道路の進路前方にある渋滞候補箇所に関する渋滞候補情報を受信したか否かを判断する(S100)。進路前方からの渋滞候補情報を受信している場合(S100:YES)、その渋滞候補情報で示される渋滞候補箇所を対象に渋滞を抑制するための自車群の車両制御を行う(S102)。自車群の車両制御の具体的な手順については後述する。
【0033】
一方、進路前方からの渋滞候補情報を受信していない場合(S100:NO)、第2に、自車両の走行位置において渋滞候補箇所の検出を行い、その結果、渋滞候補箇所を検出したか否を判断する(S104)。ただし、進路前方からの渋滞候補情報を受信しており、S102で自車群の車両制御に基づく渋滞抑制行動をとっている場合には、新たな渋滞候補箇所の検出は行わない。なお、渋滞候補箇所検出の具体的な手順については後述する。渋滞候補箇所を検出した場合(S104:YES)、検出した渋滞候補箇所に関する渋滞候補情報を外部(後続の機能化車両や路側通信装置)に伝達する(S106)。一方、渋滞候補箇所を検出しなかった場合(S104:NO)、本処理を終了する。
【0034】
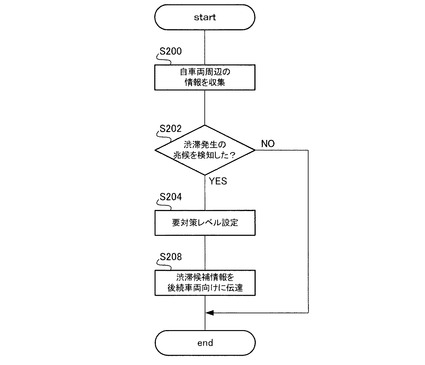
[渋滞候補箇所検出処理の説明]
つぎに、実施形態の車両制御装置が渋滞候補箇所を検出する手順について、図4のフローチャートを参照しながら説明する。渋滞候補箇所検出部5は、自車両情報取得部2及び周辺情報取得部3から自車両周辺に関する各種の検知情報を収集する(S200)。ここで収集する情報は、自車両の走行状況に関する情報として、例えば、現在地、速度、加速度、ブレーキやアクセルのペダル操作量、エンジントルク、ステアリングの操舵角等の情報が挙げられる。また、周辺に関する情報として、自車両と、自車両から所定範囲内(例えば半径数十m〜数百m程度)に存在する自車群内の周辺車両との車間距離や相対速度、路面状態(障害物の有無)等の情報が挙げられる。
【0035】
そして、S200で収集した自車両周辺の情報に基づき、渋滞発生の兆候を検出したか否かを判定する(S202)。渋滞発生の兆候を検出した場合(S202:YES)、S204の処理に進み、渋滞の兆候を検出していない場合(S202:NO)、本処理を終了する。
【0036】
なお、本実施形態では、渋滞候補箇所として、上り坂やサグ部、道路工事、落下物、故障車等といった不特定の要因によって交通流の集中や速度低下、不自然な車線変更が発生している等の条件に該当する地点を想定している。このような渋滞候補箇所を検出するため、周辺情報取得部3からの情報に基づき、自車両の周辺を同一方向に走行する自車群内の他車両の動きを把握し、特定の場所で一斉に減速や車間距離の減少が起こったり、特定の車線や障害物を避ける動きを渋滞の発生しやすい周辺状況として検知する。また、自車両情報取得部2からの情報に基づき、Gセンサやエンジントルクと車速との相関を用いて自車両の傾きを計測し、その計測結果から上り坂やサグ部といった渋滞の発生しやすい地形的条件を検出する。そして、渋滞の発生しやすい走行状況や地形的条件の検出結果を総合的に加味し、それらの条件が所定の基準に達したときに渋滞に発展する兆候として検出する。
【0037】
渋滞の兆候を検出した場合に進むS204では、その検出した渋滞の兆候の程度に応じて要対策レベルを設定する。要対策レベルは、渋滞の兆候の程度に応じて予想される対策行動の必要度合を示す指標である。例えば、渋滞の発生しやすい条件が複数重なって検出されたり、検出された条件の度合が顕著である等、渋滞発生の兆候が比較的重度である場合に要対策レベルを高く設定する。一方、渋滞発生の兆候があっても、それが比較的軽度である場合、要対策レベルを低く設定する。
【0038】
つづいて、S202において渋滞の兆候を検出した位置(座標等)を示す情報や、S204で設定した要対策レベルを示す情報を含む渋滞候補情報を生成し、その渋滞候補情報を、送信部7により後続車両に伝達する(S208)。渋滞候補情報の伝達は、先述したとおり、後続の機能化車両との車車間通信による直接送信や、路側通信装置を介した路車間通信による間接送信によって行う。渋滞候補情報の伝達後、本処理を終了する。
【0039】
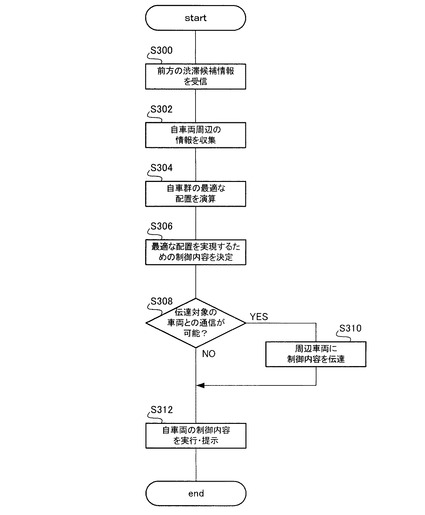
[車群制御処理の説明]
つぎに、実施形態の車両制御装置が自車群の車両制御を行う手順について、図5のフローチャートを参照しながら説明する。この処理は、所定のサイクルで繰返し実行される。
【0040】
車群制御算出部6は、まず、渋滞候補情報受信部4を通じて自車両の進路前方の地点に該当の渋滞候補情報を受信する(S300)。前方の渋滞候補情報を受信すると、自車両情報取得部2及び周辺情報取得部3から自車両周辺に関する各種の検知情報を収集する(S302)。ここで収集する情報は、自車両の走行状況に関する情報として、例えば、現在地、速度、加速度、ブレーキやアクセルのペダル操作量、エンジントルク、ステアリングの操舵角等の情報が挙げられる。また、周辺に関する情報として、自車両と、自車両からおよそ半径数十m〜数百mの範囲に存在する自車群内の周辺車両との車間距離や相対速度等の情報が挙げられる。
【0041】
つぎに、S302で収集した自車両周辺の情報に基づき、渋滞候補情報で示される渋滞候補箇所を通過する際における自車群の各車両の最適な配置を演算する(S304)。ここでは、渋滞候補箇所を通過する際に渋滞の発生を抑制するための最適な配置として、自車群の各車両が車間距離をできるだけ広く均等に維持した隊列を形成する。また、走行中の道路において片側車線が複数ある場合には、自車群の車両が複数車線に千鳥配置となるように配置を決めるようにしてもよい。
【0042】
そして、S304で演算した自車群の最適な配置を実現するための自車群の各車両が実施すべき制御内容を決定する(S306)。ここで決定する制御内容としては、自車両において実施するための対策行動や自車群に属する他車両において実施させるための対策行動があり、渋滞候補箇所から所定距離手前で自車群の各車両が最適な配置となるように各車両の速度を調節したり、車線変更を行うといった制御内容等が決定される。
【0043】
また、受信した渋滞候補情報に含まれる要対処レベルに応じて、渋滞の発生を抑制するための自車群の最適な配置を実施するタイミングについても決定する。例えば、要対処レベルが通常より高く設定されている場合、当該渋滞候補箇所から十分に手前の距離から自車群の最適な配置を実施するための車両制御を開始するように決定する。また、要対処レベルが低く設定されている場合には、当該渋滞候補箇所からやや近い距離から自車群の最適な配置を実施するための車両制御を開始するように決定する。あるいは、走行している道路の種別に応じて、高速道路は一般道路よりも早い段階で自車群の車両制御を開始するようにしてもよい。自車群の車両制御を開始する位置としては、要対処レベルや道路の種別に応じて、例えば渋滞候補箇所の手前1km〜十数kmの範囲で決定することが考えられる。
【0044】
自車群の車両制御の内容としては、自車群の規模や自車両(機能化車両)以外の非機能化車両(周辺車両)の装備内容に応じて様々な手法を採用することができる。例えば、自車群内の非機能化車両が機能化車両との車車間通信が可能な通信装置を装備している場合、その非機能化車両に対して、当該非機能化車両において実施させるための対策行動に関する情報を送信する。そして、機能化車両から対策行動に関する情報を受信した非機能化車両は、受信した情報で示される制御内容に従って各々の車両において車両制御を行う。
【0045】
一方、自車群内の非機能化車両が機能化車両との車車間通信が可能な通信装置を装備していない場合、機能化車両が自車両の加減速や車線変更、灯火の点滅制御、クラクションの鳴動といった特定パターンの情報提示行動を当該非機能化車両のために実行することで、当該非機能化車両において実施させるための対策行動に関する情報を当該非機能化車両の乗員に対して間接的に伝達する。非機能化車両の乗員は機能化車両による情報提示行動を受け、これに応じて車間距離を調節したり車線変更する等の運転操作を行い、自車群の最適な配置を実現する。
【0046】
また、自車群と自車群の前方直近を走行する先行車群との間に十分な距離がある場合には、自車両が自車群の先頭に立って意図的に強めの加速を行うことで自車群全体の速度を向上させるといった対策行動を行うことも考えられる。あるいは、自車群が自車両と少数の周辺車両で構成される小規模のものである場合、自車両が自車群内の先行車両との車間距離を十分に大きく確保するといった対策行動を行うことも考えられる。自車群が小規模の場合、このようにするだけでも渋滞抑制効果が得られる。
【0047】
図5のフローチャートの説明に戻る。次のS308では、S306において決定した周辺車両に実施させる制御内容を伝達する対象となる非機能化車両との間で車車間通信が可能であるか否かを判定する。伝達対象の非機能化車両との車車間通信が可能である場合(S308:YES)、S310の処理に進む。一方、伝達対象の非機能化車両に車車間通信のための通信装置が装備されていない等の理由で車車間通信ができない場合(S308:NO)、S312の処理に進む。
【0048】
伝達対象の非機能化車両との車車間通信が可能である場合に進むS310では、当該非機能化車両に実施させる制御内容に関する情報を、送信部7による車車間通信により伝達対象の非機能化車両に対して送信する。
【0049】
そして、S312では、S306において決定した自車両において実施する制御内容、及び自車両との車車間通信ができない非機能化車両に対する情報提示行動を、所定のタイミングで実行・提示する。ここでは、自車両において実施すべき制御内容(速度制御、車間距離制御、車線変更等)や非機能化車両に対する情報提示行動を、アクチュエータ8を通じて自動的に実行してもよいし、表示部9を通じて提示して運転者に指示するようにしてもよい。
【0050】
[特許請求の範囲に記載の構成との対応]
実施形態の車両制御装置の構成と、特許請求の範囲に記載の構成との対応は次のとおりである。実施形態の周辺情報取得部3が特許請求の範囲における検知手段に相当する。また、渋滞候補情報受信部4が取得手段に相当する。また、渋滞候補箇所検出部5が、渋滞候補検出手段、決定手段、及び、伝達手段に相当する。また、車群制御算出部6が車両制御手段に相当する。また、送信部7が通信手段に相当する。
【0051】
[効果]
上述した実施形態の車両制御装置によれば、以下のような効果を奏する。
先行車群内において実施形態の車両制御装置を搭載した機能化車両が渋滞に発展しそうな兆候を検出した場合、その渋滞候補箇所に関する渋滞候補情報を後続の機能化車両に伝達できる。そして、先行する機能化車両から発信された渋滞候補情報を受信した後続の機能化車両は、自車群がその渋滞候補箇所付近を走行する際に、渋滞を抑制するように自車群の走行を制御することができる。このような構成によって、渋滞多発地帯に設定された特定の制御領域だけでなく、不特定の場所で偶発的に発生し得る渋滞に対して、早期に渋滞抑制のための対策行動をとることができる。これにより、従来技術における特定の制御領域に制限されることなく、広範囲にわたって渋滞を抑制できる。
【符号の説明】
【0052】
1…センサ類、2…自車両情報取得部、3…周辺情報取得部、4…渋滞候補情報受信部、5…渋滞候補箇所検出部、6…車群制御算出部、7…送信部、8…アクチュエータ、9…表示部。
【技術分野】
【0001】
本発明は、車両の走行を制御して渋滞の発生を抑制する車両制御装置に関する。
【背景技術】
【0002】
従来、複数の車両が車群として走行する場合に、車群の走行を適切に制御する車両群制御システムが知られている(例えば、特許文献1参照)。具体的には、所定の制御領域内を走行する車群の各車両の走行状態を検出し、各々車両に対する目標速度/加速度を算出し、その結果を受信機能及び結果に従う制御機能を備えた各車両に伝達する。このようにすることで、特定の事故多発地帯や、渋滞多発地帯での事故や渋滞を緩和することできるとしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−59094号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術では、渋滞多発地帯や事故多発地帯に設定された特定の制御領域に予め設けられた固定の観測装置及び演算処理装置によって各車両に対する制御内容を決定している。そのため、あらかじめ想定された制御領域以外で発生し得る偶発的な渋滞などに対して対処することはできないという問題がある。
【0005】
本発明は、このような問題を解決するためになされたものであり、不特定の場所においても早期に渋滞の発生を抑制するため車群制御を行うことのできる技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
以下、本発明において採用した構成について説明する。
本発明の車両制御装置は、渋滞候補検出手段、伝達手段、取得手段、及び、車両制御手段を備える。渋滞候補検出手段は、自車両が備える検知手段により検知された自車両周辺の状況に基づき、渋滞に発展する兆候に関する検出条件に該当する道路上の渋滞候補箇所を検出する。伝達手段は、渋滞候補検出手段により渋滞候補箇所を検出した場合、その検出した渋滞候補箇所の位置を示す情報を含む渋滞候補情報を他車両あるいは外部装置に対して伝達する。なお、本発明では、渋滞候補情報が最終的に後続の車両に届くことを想定しているが、その伝達方法としては、無線通信を利用した車車間通信により後続車両に直接送信するものであってもよいし、外部のインフラとして設けられた通信設備を中継して、間接的に後続車両に伝達するものであってもよい。
【0007】
一方、取得手段は、他車両において生成され伝達された渋滞候補情報を取得する。渋滞候補情報の取得方法としては、無線通信を利用した車車間通信により送信元の先行車両から直接受信するものであってもよいし、外部のインフラとして設けられた通信設備を中継して、間接的に先行車両から取得するものであってもよい。そして、車両制御手段は、取得手段により自車両が走行中の道路の進路前方にある渋滞候補箇所に関する渋滞候補情報を取得した場合、自車両と自車両と同じ道路を同方向に進行する周辺車両とからなる自車群において、当該渋滞候補箇所での渋滞を抑制するための自車群の走行方法に関する制御内容を決定し、その決定した制御内容に従って自車群に対する車両制御を行う。
【0008】
このように構成された本発明によれば、自車両が走行している場所において渋滞に発展しそうな兆候を検出した場合、その渋滞候補箇所に関する渋滞候補情報を後続の車両に伝達できる。その一方で、先行する車両から前方の渋滞候補箇所に関する渋滞候補情報を取得した場合、自車両がその渋滞候補箇所付近を走行する際に、渋滞を抑制するように自車群の走行を制御することができる。自車群の走行制御としては、自車群において渋滞の発生を助長するような減速が起こらないように、例えば、自車群の各車両間の車間距離や速度を調節したり、車線変更により車線分布の集中を緩和することが挙げられる。
【0009】
本発明の車両制御装置を搭載した先行車両と後続車両とにおいて、先行車両が検出した渋滞候補情報に基づいて後続車両が渋滞抑制のために自車群の走行を制御する構成によれば、渋滞多発地帯に設定された特定の制御領域だけでなく、不特定の場所で偶発的に発生し得る渋滞に対して、早期に渋滞抑制のための行動をとることができる。これにより、従来技術における特定の制御領域に制限されることなく、広範囲にわたって渋滞を抑制できる。
【0010】
ところで、渋滞の発生しやすい条件としては、上り坂やサグ部(下り坂から上り坂への変化点)といった地形的条件に加え、工事による走行規制や落下物等の障害物といった不規則的あるいは偶発的条件もある。そのような条件の場所では渋滞の兆候として、例えば、特定の箇所で車群において一斉に減速が起こったり、車間距離が減少したり、ある車線を避ける動きをする等といった挙動が起きることが予想される。
【0011】
そこで、渋滞候補箇所の検出においては、請求項2に記載のように、自車両と自車両周辺の車両との相互の挙動の状態に基づいて行うように構成することが考えられる。より具体的には、請求項3に記載のように、自車両と周辺車両との車間距離又は相対速度の少なくとも何れかに基づく検出条件によって渋滞候補箇所を検出するように構成してもよい。このように、渋滞候補箇所の検出方法として、車間距離や相対速度といった自車両と周辺車両との相互の挙動の状態を捉えることで、不特定の場所で偶発的に発生し得る渋滞の兆候を的確に検出できる。
【0012】
さらに、請求項4に記載のように、渋滞候補箇所を検出した際、その検出された渋滞候補箇所における渋滞に発展する兆候の程度に応じて、要求される対処の程度を示す要対処レベルを決定し、その決定した要対処レベルに関する情報を更に含む渋滞候補情報を外部装置に対して伝達するように構成してもよい。このように構成することで、後続の車群において要対処レベルに応じた対策行動をとることができる。
【0013】
具体的には、請求項5に記載のように、取得した渋滞候補情報に含まれる要対処レベルに関する情報に基づき、渋滞候補箇所から要対処レベルに応じた所定距離手前の位置を基準に自車群に対する車両制御を開始するように構成するとよい。例えば、重度の渋滞に発展する可能性のある兆候か検知された場合(=要対処レベル高)には、渋滞候補箇所から十分に手前の距離から渋滞を抑制するための車両制御を開始し、軽度の渋滞に発展する兆候が検知された場合(=要対処レベル低)には、渋滞候補箇所からやや近い距離から渋滞を抑制するための車両制御を開始するといった区別をつけることができる。
【0014】
つぎに、車両制御装置が前方の渋滞候補箇所に対して行う車両制御の手順としては、請求項6に記載のように構成することが考えられる。すなわち、車両制御手段は、検知手段により自車両と自車両周辺の車両との相互の挙動の状況を検出し、その検出した状況に応じた渋滞抑制のための対策行動を逐次算出する。このようにすることで、自車群内の車間距離や相対速度等といった周辺状況の変化に応じて適切な対策行動を算出できる。
【0015】
さらに、請求項7に記載のように、自車両において実施するための前記対策行動、又は、自車群に属する他車両において実施させるための前記対策行動の少なくとも何れかを算出し、自車両において実施するための対策行動に従って自車両の走行を制御する一方、他車両において実施させるための対策行動に関する情報を当該他車両に対して伝達するように構成してもよい。このようにすることで、自車両だけの走行制御だけでなく、自車群内の他車両も制御対象とする速度調整や車線変更等といった制御内容を他車両に伝達し、それを他車両において実施させることで、自車群の隊列走行を効率的に制御できる。
【0016】
なお、他車両において実施させるための対策行動の伝達方法する場合、伝送対象となる他車両と自車両との間でデータ通信が可能であるか否かによって、必要となる対応が異なる。具体的には、他車両において実施させるための対策行動の伝達対象となる他車両が自車両と間でデータ通信を行う機能を有する場合、当該他車両において実施させるための対策行動に関する情報を、通信手段によるデータ通信により当該他車両に伝達するようにすればよい(請求項8)。
【0017】
一方、他車両において実施させるための対策行動の伝達対象となる他車両が自車両と間でデータ通信を行う機能を持たない場合、車車間通信による直接的な情報伝達ができないため、次のようにすることが考えられる。すなわち、他車両において実施させるための対策行動の伝達対象であって、自車両が備える通信手段により自車両と間でデータ通信を行う機能を持たない他車両に対して、自車両の走行状態の変化や特定の提示機器の作動制御による情報提示行動を行うことで、当該他車両の乗員に対して当該他車両において実施させるための対策行動に関する情報を伝達する。このように、自車両が行う情報提示行動によって、伝達対象の他車両の乗員に対して対策行動に関する情報を伝達することで、当該他車両の乗員に対して対策行動の実施を促すことができる。
【0018】
ところで、車両制御手段において決定した渋滞を抑制するための制御内容に関する情報を、例えば音声や表示等を用いる情報提示手段によって自車両の乗員に対して提示するように構成してもよい(請求項10)。このように構成することで、渋滞を抑制するための制御内容を自車両の乗員に把握させることができ、自発的な対策行動の実施を乗員に対して促すことができる。
【図面の簡単な説明】
【0019】
【図1】実施形態の車両制御装置の概略構成を示すブロック図である。
【図2】車両制御装置を搭載した車両による渋滞抑制動作の概要を模式的に示す説明図である。
【図3】メイン処理の手順を示すフローチャートである。
【図4】渋滞候補箇所を検出する手順を示すフローチャートである。
【図5】自車群の車両制御を行う手順を示すフローチャートである。
【発明を実施するための形態】
【0020】
以下、本発明の一実施形態を図面に基づいて説明する。なお、本発明は下記の実施形態に何ら限定されるものではなく様々な態様にて実施することが可能である。
[車両制御装置の構成の説明]
実施形態の車両制御装置の概略構成について、図1を参照しながら説明する。
【0021】
実施形態の車両制御装置は、センサ類1、自車両情報取得部2、周辺情報取得部3、渋滞候補情報受信部4、渋滞候補箇所検出部5、車群制御算出部6、送信部7、アクチュエータ8、及び、表示部9を備える車載電子制御装置である。
【0022】
センサ類1は、自車両周辺の状況を検知するためのレーダー、ソナー、カメラ等の各種の周辺監視センサである。自車両情報取得部2は、自車両に装備された各種機器から現在地、速度、加速度、ブレーキやアクセルのペダル操作量、エンジントルク、ステアリングの操舵角等といった自車両の走行状況に関する各種情報を取得する電子装置である。周辺情報取得部3は、センサ類1によって取得された検知情報に基づき、自車両と周辺車両との車間距離や相対速度、路面状態(障害物の有無)等の周辺情報を取得する電子装置である。
【0023】
渋滞候補情報受信部4は、他車両から伝達される渋滞候補情報を受信する通信装置である。具体的には、次のような構成が考えられる。例えば、自車両から数km〜数十km程度前方を走行する先行車両との車車間通信(電波・光による無線通信)により、先行車両から発信された渋滞候補情報を直接受信する。あるいは、先行車両において検出された渋滞候補情報を路側に設置された路側通信装置に一旦送信し、この路側通信装置との間の路車間通信によって間接的に渋滞候補情報を受信してもよい。あるいは、インターネットを経由したクラウドコンピューティングやサーバ連携を利用し、先行車両からインターネットを通じてサーバにアップロードされた渋滞候補情報を、無線通信端末等によるインターネット接続により受信する構成であってもよい。
【0024】
渋滞候補箇所検出部5は、自車両情報取得部2及び周辺情報取得部3から入力される検知情報に基づき、渋滞に発展する兆候に関する検出条件に該当する道路上の渋滞候補箇所を検出し、渋滞候補情報を生成してそれを外部に伝達する電子装置である。車群制御算出部6は、渋滞候補情報受信部4によって自車両の進路前方で先行車両により発信された渋滞候補情報を受信した条件下において、自車両情報取得部2及び周辺情報取得部3から入力される検知情報に基づき、当該渋滞候補箇所での渋滞の発生を回避・抑制するための自車群の最適な制御内容を算出する電子装置である。
【0025】
送信部7は、外部と情報通信を行うための通信装置である。この送信部7では、渋滞候補箇所検出部5において検出した渋滞候補箇所に関する渋滞候補情報を外部の後続車両や路側通信装置等に送信する他、車群制御算出部6において算出した制御内容で他車両において実施させるための対策行動に関する情報を当該他車両に送信する。
【0026】
アクチュエータ8は、車群制御算出部6において算出した制御内容に従って、アクセルやブレーキ、ステアリング、灯火、クラクション等といった各種車載機器類を作動させるアクチュエータである。表示部9は、車群制御算出部6において算出した制御内容に関する情報を運転者に対して提示するための表示装置である。
【0027】
[動作の概要]
つぎに、本実施形態の車両制御装置を搭載した車両(以下、機能化車両と称する。)による動作の概要について、図2を参照しながら説明する。
【0028】
ここでは、図2に示す通り、矢印で示す進行方向に沿って同一道路上を走行する先行車群及び後続車群に、それぞれ本実施形態の車両制御装置を搭載した機能化車両が含まれており、その周辺に車両制御装置を搭載していない複数の非機能化車両(周辺車両)が走行している状況を想定する。
【0029】
このような状況下において先行車群内を走行している機能化車両が、例えば自車群内で全体的な速度低下が発生する等といった渋滞の兆候を検知した場合、その場所を渋滞候補箇所として検出し、その渋滞候補箇所に関する渋滞候補情報を後続車群内の機能化車両に伝達する。渋滞候補情報には、渋滞候補箇所の位置を示す情報や渋滞の兆候の程度を示す要対処レベルを示す情報等が含まれる。また、渋滞候補情報の伝達は、後続の機能化車両との車車間通信による直接送信や、路側通信装置を介した路車間通信による間接送信によって行う。
【0030】
後続車群内を走行している機能化車両は、先行車群の機能化車両からの渋滞候補情報を受信すると、その渋滞候補情報の内容と自車群の走行状況とに基づいて、当該渋滞候補箇所での渋滞を抑制するための自車群の走行方法に関する制御内容を決定し、その制御内容に従って自車群の走行を制御する。
【0031】
[メイン処理の説明]
つぎに、実施形態の車両制御装置が実行するメイン処理の手順について、図3のフローチャートを参照しながら説明する。この処理は、車両の走行時において所定のサイクル(例えば1Hz)で繰返し実行される。
【0032】
このメイン処理では、大きく分けて2つの判断を行う。第一に、渋滞候補情報受信部4における車車間通信又は路車間通信によって、自車両が走行中の道路の進路前方にある渋滞候補箇所に関する渋滞候補情報を受信したか否かを判断する(S100)。進路前方からの渋滞候補情報を受信している場合(S100:YES)、その渋滞候補情報で示される渋滞候補箇所を対象に渋滞を抑制するための自車群の車両制御を行う(S102)。自車群の車両制御の具体的な手順については後述する。
【0033】
一方、進路前方からの渋滞候補情報を受信していない場合(S100:NO)、第2に、自車両の走行位置において渋滞候補箇所の検出を行い、その結果、渋滞候補箇所を検出したか否を判断する(S104)。ただし、進路前方からの渋滞候補情報を受信しており、S102で自車群の車両制御に基づく渋滞抑制行動をとっている場合には、新たな渋滞候補箇所の検出は行わない。なお、渋滞候補箇所検出の具体的な手順については後述する。渋滞候補箇所を検出した場合(S104:YES)、検出した渋滞候補箇所に関する渋滞候補情報を外部(後続の機能化車両や路側通信装置)に伝達する(S106)。一方、渋滞候補箇所を検出しなかった場合(S104:NO)、本処理を終了する。
【0034】
[渋滞候補箇所検出処理の説明]
つぎに、実施形態の車両制御装置が渋滞候補箇所を検出する手順について、図4のフローチャートを参照しながら説明する。渋滞候補箇所検出部5は、自車両情報取得部2及び周辺情報取得部3から自車両周辺に関する各種の検知情報を収集する(S200)。ここで収集する情報は、自車両の走行状況に関する情報として、例えば、現在地、速度、加速度、ブレーキやアクセルのペダル操作量、エンジントルク、ステアリングの操舵角等の情報が挙げられる。また、周辺に関する情報として、自車両と、自車両から所定範囲内(例えば半径数十m〜数百m程度)に存在する自車群内の周辺車両との車間距離や相対速度、路面状態(障害物の有無)等の情報が挙げられる。
【0035】
そして、S200で収集した自車両周辺の情報に基づき、渋滞発生の兆候を検出したか否かを判定する(S202)。渋滞発生の兆候を検出した場合(S202:YES)、S204の処理に進み、渋滞の兆候を検出していない場合(S202:NO)、本処理を終了する。
【0036】
なお、本実施形態では、渋滞候補箇所として、上り坂やサグ部、道路工事、落下物、故障車等といった不特定の要因によって交通流の集中や速度低下、不自然な車線変更が発生している等の条件に該当する地点を想定している。このような渋滞候補箇所を検出するため、周辺情報取得部3からの情報に基づき、自車両の周辺を同一方向に走行する自車群内の他車両の動きを把握し、特定の場所で一斉に減速や車間距離の減少が起こったり、特定の車線や障害物を避ける動きを渋滞の発生しやすい周辺状況として検知する。また、自車両情報取得部2からの情報に基づき、Gセンサやエンジントルクと車速との相関を用いて自車両の傾きを計測し、その計測結果から上り坂やサグ部といった渋滞の発生しやすい地形的条件を検出する。そして、渋滞の発生しやすい走行状況や地形的条件の検出結果を総合的に加味し、それらの条件が所定の基準に達したときに渋滞に発展する兆候として検出する。
【0037】
渋滞の兆候を検出した場合に進むS204では、その検出した渋滞の兆候の程度に応じて要対策レベルを設定する。要対策レベルは、渋滞の兆候の程度に応じて予想される対策行動の必要度合を示す指標である。例えば、渋滞の発生しやすい条件が複数重なって検出されたり、検出された条件の度合が顕著である等、渋滞発生の兆候が比較的重度である場合に要対策レベルを高く設定する。一方、渋滞発生の兆候があっても、それが比較的軽度である場合、要対策レベルを低く設定する。
【0038】
つづいて、S202において渋滞の兆候を検出した位置(座標等)を示す情報や、S204で設定した要対策レベルを示す情報を含む渋滞候補情報を生成し、その渋滞候補情報を、送信部7により後続車両に伝達する(S208)。渋滞候補情報の伝達は、先述したとおり、後続の機能化車両との車車間通信による直接送信や、路側通信装置を介した路車間通信による間接送信によって行う。渋滞候補情報の伝達後、本処理を終了する。
【0039】
[車群制御処理の説明]
つぎに、実施形態の車両制御装置が自車群の車両制御を行う手順について、図5のフローチャートを参照しながら説明する。この処理は、所定のサイクルで繰返し実行される。
【0040】
車群制御算出部6は、まず、渋滞候補情報受信部4を通じて自車両の進路前方の地点に該当の渋滞候補情報を受信する(S300)。前方の渋滞候補情報を受信すると、自車両情報取得部2及び周辺情報取得部3から自車両周辺に関する各種の検知情報を収集する(S302)。ここで収集する情報は、自車両の走行状況に関する情報として、例えば、現在地、速度、加速度、ブレーキやアクセルのペダル操作量、エンジントルク、ステアリングの操舵角等の情報が挙げられる。また、周辺に関する情報として、自車両と、自車両からおよそ半径数十m〜数百mの範囲に存在する自車群内の周辺車両との車間距離や相対速度等の情報が挙げられる。
【0041】
つぎに、S302で収集した自車両周辺の情報に基づき、渋滞候補情報で示される渋滞候補箇所を通過する際における自車群の各車両の最適な配置を演算する(S304)。ここでは、渋滞候補箇所を通過する際に渋滞の発生を抑制するための最適な配置として、自車群の各車両が車間距離をできるだけ広く均等に維持した隊列を形成する。また、走行中の道路において片側車線が複数ある場合には、自車群の車両が複数車線に千鳥配置となるように配置を決めるようにしてもよい。
【0042】
そして、S304で演算した自車群の最適な配置を実現するための自車群の各車両が実施すべき制御内容を決定する(S306)。ここで決定する制御内容としては、自車両において実施するための対策行動や自車群に属する他車両において実施させるための対策行動があり、渋滞候補箇所から所定距離手前で自車群の各車両が最適な配置となるように各車両の速度を調節したり、車線変更を行うといった制御内容等が決定される。
【0043】
また、受信した渋滞候補情報に含まれる要対処レベルに応じて、渋滞の発生を抑制するための自車群の最適な配置を実施するタイミングについても決定する。例えば、要対処レベルが通常より高く設定されている場合、当該渋滞候補箇所から十分に手前の距離から自車群の最適な配置を実施するための車両制御を開始するように決定する。また、要対処レベルが低く設定されている場合には、当該渋滞候補箇所からやや近い距離から自車群の最適な配置を実施するための車両制御を開始するように決定する。あるいは、走行している道路の種別に応じて、高速道路は一般道路よりも早い段階で自車群の車両制御を開始するようにしてもよい。自車群の車両制御を開始する位置としては、要対処レベルや道路の種別に応じて、例えば渋滞候補箇所の手前1km〜十数kmの範囲で決定することが考えられる。
【0044】
自車群の車両制御の内容としては、自車群の規模や自車両(機能化車両)以外の非機能化車両(周辺車両)の装備内容に応じて様々な手法を採用することができる。例えば、自車群内の非機能化車両が機能化車両との車車間通信が可能な通信装置を装備している場合、その非機能化車両に対して、当該非機能化車両において実施させるための対策行動に関する情報を送信する。そして、機能化車両から対策行動に関する情報を受信した非機能化車両は、受信した情報で示される制御内容に従って各々の車両において車両制御を行う。
【0045】
一方、自車群内の非機能化車両が機能化車両との車車間通信が可能な通信装置を装備していない場合、機能化車両が自車両の加減速や車線変更、灯火の点滅制御、クラクションの鳴動といった特定パターンの情報提示行動を当該非機能化車両のために実行することで、当該非機能化車両において実施させるための対策行動に関する情報を当該非機能化車両の乗員に対して間接的に伝達する。非機能化車両の乗員は機能化車両による情報提示行動を受け、これに応じて車間距離を調節したり車線変更する等の運転操作を行い、自車群の最適な配置を実現する。
【0046】
また、自車群と自車群の前方直近を走行する先行車群との間に十分な距離がある場合には、自車両が自車群の先頭に立って意図的に強めの加速を行うことで自車群全体の速度を向上させるといった対策行動を行うことも考えられる。あるいは、自車群が自車両と少数の周辺車両で構成される小規模のものである場合、自車両が自車群内の先行車両との車間距離を十分に大きく確保するといった対策行動を行うことも考えられる。自車群が小規模の場合、このようにするだけでも渋滞抑制効果が得られる。
【0047】
図5のフローチャートの説明に戻る。次のS308では、S306において決定した周辺車両に実施させる制御内容を伝達する対象となる非機能化車両との間で車車間通信が可能であるか否かを判定する。伝達対象の非機能化車両との車車間通信が可能である場合(S308:YES)、S310の処理に進む。一方、伝達対象の非機能化車両に車車間通信のための通信装置が装備されていない等の理由で車車間通信ができない場合(S308:NO)、S312の処理に進む。
【0048】
伝達対象の非機能化車両との車車間通信が可能である場合に進むS310では、当該非機能化車両に実施させる制御内容に関する情報を、送信部7による車車間通信により伝達対象の非機能化車両に対して送信する。
【0049】
そして、S312では、S306において決定した自車両において実施する制御内容、及び自車両との車車間通信ができない非機能化車両に対する情報提示行動を、所定のタイミングで実行・提示する。ここでは、自車両において実施すべき制御内容(速度制御、車間距離制御、車線変更等)や非機能化車両に対する情報提示行動を、アクチュエータ8を通じて自動的に実行してもよいし、表示部9を通じて提示して運転者に指示するようにしてもよい。
【0050】
[特許請求の範囲に記載の構成との対応]
実施形態の車両制御装置の構成と、特許請求の範囲に記載の構成との対応は次のとおりである。実施形態の周辺情報取得部3が特許請求の範囲における検知手段に相当する。また、渋滞候補情報受信部4が取得手段に相当する。また、渋滞候補箇所検出部5が、渋滞候補検出手段、決定手段、及び、伝達手段に相当する。また、車群制御算出部6が車両制御手段に相当する。また、送信部7が通信手段に相当する。
【0051】
[効果]
上述した実施形態の車両制御装置によれば、以下のような効果を奏する。
先行車群内において実施形態の車両制御装置を搭載した機能化車両が渋滞に発展しそうな兆候を検出した場合、その渋滞候補箇所に関する渋滞候補情報を後続の機能化車両に伝達できる。そして、先行する機能化車両から発信された渋滞候補情報を受信した後続の機能化車両は、自車群がその渋滞候補箇所付近を走行する際に、渋滞を抑制するように自車群の走行を制御することができる。このような構成によって、渋滞多発地帯に設定された特定の制御領域だけでなく、不特定の場所で偶発的に発生し得る渋滞に対して、早期に渋滞抑制のための対策行動をとることができる。これにより、従来技術における特定の制御領域に制限されることなく、広範囲にわたって渋滞を抑制できる。
【符号の説明】
【0052】
1…センサ類、2…自車両情報取得部、3…周辺情報取得部、4…渋滞候補情報受信部、5…渋滞候補箇所検出部、6…車群制御算出部、7…送信部、8…アクチュエータ、9…表示部。
【特許請求の範囲】
【請求項1】
自車両が備える検知手段により検知された自車両周辺の状況に基づき、渋滞に発展する兆候に関する検出条件に該当する道路上の渋滞候補箇所を検出する渋滞候補検出手段と、
前記渋滞候補検出手段により渋滞候補箇所を検出した場合、その検出した渋滞候補箇所の位置を示す情報を含む渋滞候補情報を他車両あるいは外部装置に対して伝達する伝達手段と、
他車両において生成され伝達された前記渋滞候補情報を取得する取得手段と、
前記取得手段により自車両が走行中の道路の進路前方にある渋滞候補箇所に関する前記渋滞候補情報を取得した場合、自車両と自車両と同じ道路を同方向に進行する周辺車両とからなる自車群において、当該渋滞候補箇所での渋滞を抑制するための自車群の走行方法に関する制御内容を決定し、その決定した制御内容に従って自車群に対する車両制御を行う車両制御手段とを備えること
を特徴とする車両制御装置。
【請求項2】
請求項1に記載の車両制御装置において、
前記渋滞候補検出手段は、自車両と自車両周辺の車両との相互の挙動の状態に基づく検出条件によって前記渋滞候補箇所を検出すること
を特徴とする車両制御装置。
【請求項3】
請求項2に記載の車両制御装置において、
前記渋滞候補検出手段は、自車両と自車両周辺の車両との相互の挙動として、車間距離又は相対速度の少なくとも何れかに基づく検出条件によって前記渋滞候補箇所を検出すること
を特徴とする車両制御装置。
【請求項4】
請求項1ないし請求項3の何れか1項に記載の車両制御装置において、
検出された前記渋滞候補箇所における渋滞に発展する兆候の程度に応じて、その渋滞候補箇所に対して要求される対処の程度を示す要対処レベルを決定する決定手段を更に備え、
前記伝達手段は、前記決定手段において決定された要対処レベルに関する情報を更に含む前記渋滞候補情報を外部装置に対して伝達すること
を特徴とする車両制御装置。
【請求項5】
請求項4に記載の車両制御装置において、
前記車両制御手段は、取得した前記渋滞候補情報に含まれる要対処レベルに関する情報に基づき、前記渋滞候補箇所から前記要対処レベルに応じた所定距離手前の位置を基準に自車群に対する車両制御を開始すること
を特徴とする車両制御装置。
【請求項6】
請求項1ないし請求項5の何れか1項に記載の車両制御装置において、
前記車両制御手段は、前記検知手段により自車両と自車両周辺の車両との相互の挙動の状況を検出し、その検出した状況に応じた渋滞抑制のための制御内容を逐次算出すること
を特徴とする車両制御装置。
【請求項7】
請求項6に記載の車両制御装置において、
前記車両制御手段は、前記制御内容として自車両において実施するための対策行動、又は、前記自車群に属する他車両において実施させるための対策行動の少なくとも何れかを算出し、前記自車両において実施するための対策行動に従って自車両の走行を制御する一方、前記他車両において実施させるための対策行動に関する情報を当該他車両に対して伝達すること
を特徴とする車両制御装置。
【請求項8】
請求項7に記載の車両制御装置において、
前記車両制御手段は、前記他車両において実施させるための対策行動の伝達対象であって、自車両が備える通信手段により自車両と間でデータ通信を行う機能を有する他車両に対して、当該他車両において実施させるための前記対策行動に関する情報を、前記通信手段によるデータ通信により当該他車両に伝達すること
を特徴とする車両制御装置。
【請求項9】
請求項7又は請求項8に記載の車両制御装置において、
前記車両制御手段は、前記他車両において実施させるための対策行動の伝達対象であって、自車両が備える通信手段により自車両と間でデータ通信を行う機能を持たない他車両に対して、自車両の走行状態の変化や特定の提示機器の作動制御による情報提示行動を行うことで、当該他車両の乗員に対して当該他車両において実施させるための前記対策行動に関する情報を伝達すること
を特徴とする車両制御装置。
【請求項10】
請求項1ないし請求項9の何れか1項に記載の車両制御装置において、
前記車両制御手段は、決定した前記制御内容に関する情報を、自車両の乗員に対して情報を提示するための情報提示手段を用いて提示すること
を特徴とする車両制御装置。
【請求項1】
自車両が備える検知手段により検知された自車両周辺の状況に基づき、渋滞に発展する兆候に関する検出条件に該当する道路上の渋滞候補箇所を検出する渋滞候補検出手段と、
前記渋滞候補検出手段により渋滞候補箇所を検出した場合、その検出した渋滞候補箇所の位置を示す情報を含む渋滞候補情報を他車両あるいは外部装置に対して伝達する伝達手段と、
他車両において生成され伝達された前記渋滞候補情報を取得する取得手段と、
前記取得手段により自車両が走行中の道路の進路前方にある渋滞候補箇所に関する前記渋滞候補情報を取得した場合、自車両と自車両と同じ道路を同方向に進行する周辺車両とからなる自車群において、当該渋滞候補箇所での渋滞を抑制するための自車群の走行方法に関する制御内容を決定し、その決定した制御内容に従って自車群に対する車両制御を行う車両制御手段とを備えること
を特徴とする車両制御装置。
【請求項2】
請求項1に記載の車両制御装置において、
前記渋滞候補検出手段は、自車両と自車両周辺の車両との相互の挙動の状態に基づく検出条件によって前記渋滞候補箇所を検出すること
を特徴とする車両制御装置。
【請求項3】
請求項2に記載の車両制御装置において、
前記渋滞候補検出手段は、自車両と自車両周辺の車両との相互の挙動として、車間距離又は相対速度の少なくとも何れかに基づく検出条件によって前記渋滞候補箇所を検出すること
を特徴とする車両制御装置。
【請求項4】
請求項1ないし請求項3の何れか1項に記載の車両制御装置において、
検出された前記渋滞候補箇所における渋滞に発展する兆候の程度に応じて、その渋滞候補箇所に対して要求される対処の程度を示す要対処レベルを決定する決定手段を更に備え、
前記伝達手段は、前記決定手段において決定された要対処レベルに関する情報を更に含む前記渋滞候補情報を外部装置に対して伝達すること
を特徴とする車両制御装置。
【請求項5】
請求項4に記載の車両制御装置において、
前記車両制御手段は、取得した前記渋滞候補情報に含まれる要対処レベルに関する情報に基づき、前記渋滞候補箇所から前記要対処レベルに応じた所定距離手前の位置を基準に自車群に対する車両制御を開始すること
を特徴とする車両制御装置。
【請求項6】
請求項1ないし請求項5の何れか1項に記載の車両制御装置において、
前記車両制御手段は、前記検知手段により自車両と自車両周辺の車両との相互の挙動の状況を検出し、その検出した状況に応じた渋滞抑制のための制御内容を逐次算出すること
を特徴とする車両制御装置。
【請求項7】
請求項6に記載の車両制御装置において、
前記車両制御手段は、前記制御内容として自車両において実施するための対策行動、又は、前記自車群に属する他車両において実施させるための対策行動の少なくとも何れかを算出し、前記自車両において実施するための対策行動に従って自車両の走行を制御する一方、前記他車両において実施させるための対策行動に関する情報を当該他車両に対して伝達すること
を特徴とする車両制御装置。
【請求項8】
請求項7に記載の車両制御装置において、
前記車両制御手段は、前記他車両において実施させるための対策行動の伝達対象であって、自車両が備える通信手段により自車両と間でデータ通信を行う機能を有する他車両に対して、当該他車両において実施させるための前記対策行動に関する情報を、前記通信手段によるデータ通信により当該他車両に伝達すること
を特徴とする車両制御装置。
【請求項9】
請求項7又は請求項8に記載の車両制御装置において、
前記車両制御手段は、前記他車両において実施させるための対策行動の伝達対象であって、自車両が備える通信手段により自車両と間でデータ通信を行う機能を持たない他車両に対して、自車両の走行状態の変化や特定の提示機器の作動制御による情報提示行動を行うことで、当該他車両の乗員に対して当該他車両において実施させるための前記対策行動に関する情報を伝達すること
を特徴とする車両制御装置。
【請求項10】
請求項1ないし請求項9の何れか1項に記載の車両制御装置において、
前記車両制御手段は、決定した前記制御内容に関する情報を、自車両の乗員に対して情報を提示するための情報提示手段を用いて提示すること
を特徴とする車両制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−109495(P2013−109495A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−252862(P2011−252862)
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]