
車両制御補助装置及び車両制御補助方法
【課題】 運転者が理想のブレーキ操作量に対する現在のブレーキ操作量の過不足を適切に判断することができ、それによって容易に適切なブレーキ操作を行えるようにする。
【解決手段】 自車両の現在車速を検出する車速検出手段18と、自車両のブレーキ操作量を検出するブレーキ操作量検出手段21と、自車両の減速制御の目標点である減速目標点を決定する減速目標点決定手段24と、減速目標点における目標車速を決定する目標車速決定手段25と、現在車速、減速目標点及び目標車速に基づいて、減速目標点において目標車速となるための目標減速点までの間の理想ブレーキ操作量を決定する理想ブレーキ操作量決定手段47と、理想ブレーキ操作量と現在のブレーキ操作量との関係を示す報知情報を生成する報知情報生成手段28と、生成された報知情報を報知する報知手段48と、を備える。
【解決手段】 自車両の現在車速を検出する車速検出手段18と、自車両のブレーキ操作量を検出するブレーキ操作量検出手段21と、自車両の減速制御の目標点である減速目標点を決定する減速目標点決定手段24と、減速目標点における目標車速を決定する目標車速決定手段25と、現在車速、減速目標点及び目標車速に基づいて、減速目標点において目標車速となるための目標減速点までの間の理想ブレーキ操作量を決定する理想ブレーキ操作量決定手段47と、理想ブレーキ操作量と現在のブレーキ操作量との関係を示す報知情報を生成する報知情報生成手段28と、生成された報知情報を報知する報知手段48と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、理想のブレーキ操作量と現在のブレーキ操作量との関係や理想車速と現在車速との関係を示す報知情報を生成して報知することにより、車両制御を補助する車両制御補助装置及び車両制御補助方法に関する。
【背景技術】
【0002】
車両の減速時に、その減速の程度に応じた表示を運転者に対して行うことにより、運転者による車両制御を補助する技術として、例えば下記の特許文献1には、以下のようなカーナビゲーション装置に関する技術が開示されている。このカーナビゲーション装置は、車両にブレーキが掛けられる都度、その時の減速度を検出すると共に停止するまでの速度変化を検出し、速度変化を制動特性としてパターン化して記憶しておく。そして、車両にブレーキが掛けられた時には、減速開始時の減速度を検出して通常の減速か急ブレーキかを判断し、パターン化された制動特性に当てはめて、急ブレーキであるかどうかを判断し、その判断結果に応じた表示を行う。
【0003】
これにより、車両の減速時に、その速度又は減速度を運転者の通常の制動時の運転特性と比較することにより急ブレーキか否かを判断し、表示するので、表示される画面の内容が運転者の感覚から離れた内容となることを防止できる。
【0004】
【特許文献1】特開2004−101280号公報(第3−7頁、第10図)
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、実際の運転時において、急ブレーキをかける機会は少ない。また、急ブレーキをかけている状態において、運転者が急ブレーキの表示を見る余裕も少ない。
一方、通常のブレーキ操作時には、運転者は、停止又は減速する目標地点を決め、そこまでの距離及び現在車速に基づいて経験的にブレーキ操作量を判断し、ブレーキ操作を行っている。しかし、運転者の経験的な判断のみによるブレーキ操作では、道路の路面状況や道路形状の違い等によって予測したとおりに減速されない場合が起こり得る。このような場合には、運転者は、ブレーキを更に踏み込んだり、緩めたりする操作を行う必要が生じ、車両の挙動が乱れ、他の乗員に不快感を与えたり、車両に対して無用な負荷を与えたりすることになりかねない。
【0006】
本発明は、上記の課題に鑑みてなされたものであり、その目的は、運転者が理想のブレーキ操作量に対する現在のブレーキ操作量の過不足を適切に判断することができ、それによって容易に適切なブレーキ操作を行えるようにするための車両制御補助装置及び車両制御補助方法を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するための本発明に係る車両制御補助装置の特徴構成は、自車両の現在車速を検出する車速検出手段と、自車両のブレーキ操作量を検出するブレーキ操作量検出手段と、自車両の減速制御の目標点である減速目標点を決定する減速目標点決定手段と、前記減速目標点における目標車速を決定する目標車速決定手段と、前記現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想ブレーキ操作量を決定する理想ブレーキ操作量決定手段と、前記理想ブレーキ操作量と現在のブレーキ操作量との関係を示す報知情報を生成する報知情報生成手段と、前記報知情報生成手段により生成された前記報知情報を報知する報知手段と、を備える点にある。
【0008】
この特徴構成によれば、自車両の運転者は、理想ブレーキ操作量に対して現在のブレーキ操作量がどのような関係にあるかを知ることができるので、理想のブレーキ操作量に対する現在のブレーキ操作量の過不足を適切に判断することができる。したがって、現在のブレーキ操作量を理想ブレーキ操作量に近づけるように操作することができ、容易に適切なブレーキ操作を行うことが可能となる。
【0009】
ここで、前記報知情報は、前記理想ブレーキ操作量と現在のブレーキ操作量との差を前記報知手段により運転者に報知するための情報とすると好適である。またこの際、前記理想ブレーキ操作量と現在のブレーキ操作量との差には、その差の絶対値に加えてその差の方向を含むと好適である。
【0010】
これにより、自車両の運転者は、理想ブレーキ操作量に対する現在のブレーキ操作量の差を知ることができるので、現在のブレーキ操作量を理想ブレーキ操作量に近づける操作を比較的容易に行うことが可能となる。
【0011】
また、前記理想ブレーキ操作量決定手段は、前記減速目標点までの距離との関係でブレーキ操作量を規定する複数の理想ブレーキ操作量パターン情報を有し、前記現在車速、前記目標車速、及び自車両の現在位置から前記減速目標点までの距離に基づいて、一つの理想ブレーキ操作量パターン情報を選択し、当該選択された理想ブレーキ操作量パターン情報に従って前記理想ブレーキ操作量を決定する構成とすると好適である。
【0012】
これにより、複雑な演算等をすることなく、現在車速、目標車速、及び自車両の現在位置から前記減速目標点までの距離の条件に従って理想ブレーキ操作量を決定することができる。
【0013】
また、前記現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想車速を決定する理想車速決定手段を更に備え、前記報知情報生成手段は、前記理想車速と前記現在車速との関係、及び前記理想ブレーキ操作量と現在のブレーキ操作量との関係を示す報知情報を生成する構成とすると好適である。
【0014】
これにより、自車両の運転者は、理想車速と現在車速との関係、及び理想ブレーキ操作量と現在のブレーキ操作量との関係の双方を知ることができるので、現在のブレーキ操作量及びそれに伴う自車両の車速の双方についての理想の状態に対する過不足を適切に判断することができる。したがって、現在のブレーキ操作量及び車速を理想の状態に近づけるように操作することができ、より適切なブレーキ操作を行うことが可能となる。
【0015】
あるいは、前記現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想車速を決定する理想車速決定手段を更に備え、前記報知情報生成手段は、前記理想車速と前記現在車速との関係、及び前記理想車速と現在のブレーキ操作量に基づく将来の予想車速との関係を示す報知情報を生成する構成としても好適である。
【0016】
これにより、自車両の運転者は、理想車速と現在車速との関係、及び理想車速と現在のブレーキ操作量に基づく将来の予想車速との関係の双方を知ることができるので、現在のブレーキ操作量によって自車両の車速が将来どのように変化するかを知ることができる。したがって、自車両の車速を理想車速に近づけるように、適切にブレーキ操作を行うことが可能となる。
【0017】
また、前記報知情報は、現在のブレーキ操作量で減速した場合に前記目標車速となる将来の予想減速点の位置を示す情報を更に含む構成とすると好適である。
【0018】
これにより、自車両の運転者は、現在のブレーキ操作量で減速した場合に目標車速となる位置が減速目標点に対してどこになるかを知ることができるので、自車両が目標車速となる位置が減速目標点となるようにブレーキ操作量を調節することができ、適切なブレーキ操作を行うことが可能となる。
【0019】
また、前記理想ブレーキ操作量と現在のブレーキ操作量との差、及び前記理想車速と前記現在車速との差に基づいて、前記理想ブレーキ操作量を補正する理想ブレーキ操作量補正手段を更に備える構成とすると好適である。
【0020】
これにより、ブレーキ操作量に対する車速の変化の程度が、道路状況、道路勾配、天候等に応じて変化した場合においても、そのずれを補正して適切な理想ブレーキ操作量に基づく報知情報を報知することが可能となる。
【0021】
本発明に係る車両制御補助装置のもう一つの特徴構成は、自車両の現在車速を検出する車速検出手段と、自車両のブレーキ操作量を検出するブレーキ操作量検出手段と、自車両の減速制御の目標点である減速目標点を決定する減速目標点決定手段と、前記減速目標点における目標車速を決定する目標車速決定手段と、前記現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想車速を決定する理想車速決定手段と、前記理想車速と前記現在車速との関係を示す報知情報を生成する報知情報生成手段と、前記報知情報生成手段により生成された前記報知情報を報知する報知手段と、を備える点にある。
【0022】
この特徴構成によれば、自車両の運転者は、理想車速に対して現在の車速がどのような関係にあるかを知ることができるので、自車両の現在車速の理想状態に対する過不足を適切に判断することができる。したがって、現在の車速を理想の状態に近づけるように運転者が車両制御を行うことにより、より適切な車両制御を行うことが可能となる。
【0023】
ここで、前記理想車速決定手段は、前記減速目標点までの距離との関係で車速を規定する複数の理想車速パターン情報を有し、前記現在車速、前記目標車速、及び自車両の現在位置から前記減速目標点までの距離に基づいて、一つの理想車速パターン情報を選択し、当該選択された理想車速パターン情報に従って前記理想車速を決定する構成とすると好適である。
【0024】
これにより、複雑な演算等をすることなく、現在車速、目標車速、及び自車両の現在位置から前記減速目標点までの距離の条件に従って理想車速を決定することができる。
【0025】
また、前記報知手段は、前記報知情報を画像、音声、及び振動のいずれか一つ以上により報知する構成とすることができる。
【0026】
また、自車両の進行方向に存在する先行車両を検出する先行車両検出手段を更に備え、前記減速目標点決定手段は、先行車両に対して所定の車間距離を確保できる点を減速目標点として決定し、前記目標車速決定手段は、前記先行車両の車速を目標車速として決定する構成とすると好適である。
【0027】
これにより、自車両の進行方向に先行車両が存在する場合には、先行車両に対して適切な車間距離を保ちつつ追従する走行制御を適切に行うことが可能となる。
【0028】
また、停止目標地物を検出する停止目標地物検出手段を更に備え、前記減速目標点決定手段は、前記先行車両検出手段により前記先行車両が検出されない場合には、前記停止目標地物に応じた車両停止位置を減速目標点として決定し、前記目標車速決定手段は、目標車速をゼロに決定する構成とすると好適である。
【0029】
これにより、自車両の進行方向に先行車両が存在しない場合には、例えば停止線、信号機、一時停止標識、横断歩道等の停止目標地物に対して適切な位置に自車両を停止させる走行制御を適切に行うことが可能となる。
【0030】
本発明に係る車両制御補助装置の更に別の特徴構成は、自車両の減速時に、その減速制御の目標点である減速目標点に到達するまでの間の理想的なブレーキ操作量の範囲である理想ブレーキ操作量範囲に対する現在のブレーキ操作量の関係を示す報知情報を生成する報知情報生成手段と、前記報知情報生成手段により生成された前記報知情報を報知する報知手段と、を備える点にある。
【0031】
この特徴構成によれば、自車両の運転者は、減速時に、理想ブレーキ操作量範囲に対して現在のブレーキ操作量がどのような関係にあるかを知ることができるので、理想のブレーキ操作量範囲に対する現在のブレーキ操作量の過不足を適切に判断することができる。したがって、現在のブレーキ操作量を理想ブレーキ操作量範囲内とするように操作することができ、容易に適切なブレーキ操作を行うことが可能となる。
【0032】
また、前記報知情報に基づいてブレーキ量及び車速の一方又は双方を自動制御する自動制御手段を更に備え、前記報知手段による前記報知情報の報知中に、前記報知情報の内容を含む自車両の状態が所定の条件を満たすときに、前記自動制御手段による自動制御を実行する構成としても好適である。
【0033】
これにより、報知手段による報知情報の報知を行ったにも関わらず運転者による適切なブレーキ操作等が行われない場合に、自動制御手段による制御によって適切な車両制御を行うことが可能となる。また、適切な車両制御が行われている場合には、自動制御手段による自動制御を実行しないことが可能であるので、運転者の好みに合った車両制御が行われるようにすることができる。
【0034】
本発明に係る車両制御補助方法の特徴構成は、自車両の減速制御の目標点である減速目標点を決定する減速目標点決定ステップと、前記減速目標点における目標車速を決定する目標車速決定ステップと、自車両の現在車速を検出し、該現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想ブレーキ操作量を決定する理想ブレーキ操作量決定ステップと、自車両の現在のブレーキ操作量を検出し、前記理想ブレーキ操作量と前記現在のブレーキ操作量との関係を示す報知情報を生成する報知情報生成ステップと、前記報知情報生成ステップにより生成された前記報知情報を報知する報知ステップと、を備える点にある。
【0035】
この特徴構成によれば、自車両の運転者は、理想ブレーキ操作量に対して現在のブレーキ操作量がどのような関係にあるかを知ることができるので、理想のブレーキ操作量に対する現在のブレーキ操作量の過不足を適切に判断することができる。したがって、現在のブレーキ操作量を理想ブレーキ操作量に近づけるように操作することができ、容易に適切なブレーキ操作を行うことが可能となる。
【0036】
本発明に係る車両制御補助方法のもう一つの特徴構成は、自車両の減速制御の目標点である減速目標点を決定する減速目標点決定ステップと、前記減速目標点における目標車速を決定する目標車速決定ステップと、自車両の現在車速を検出し、該現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想車速を決定する理想車速決定ステップと、前記理想車速と前記現在車速との関係を示す報知情報を生成する報知情報生成ステップと、前記報知情報生成ステップにより生成された前記報知情報を報知する報知ステップと、を備える点にある。
【0037】
この特徴構成によれば、自車両の運転者は、理想車速に対して現在の車速がどのような関係にあるかを知ることができるので、自車両の現在車速の理想状態に対する過不足を適切に判断することができる。したがって、現在の車速を理想の状態に近づけるように運転者が車両制御を行うことにより、より適切な車両制御を行うことが可能となる。
【発明を実施するための最良の形態】
【0038】
以下に、本発明の第一の実施形態について図面に基づいて説明する。
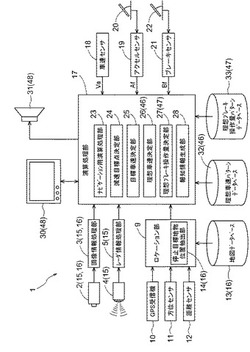
図1は、本実施形態に係る車両制御補助装置1の構成を示すブロック図である。本実施形態に係る車両制御補助装置1は、減速制御の際に理想のブレーキ操作量と現在のブレーキ操作量との関係や理想車速と現在車速との関係を示す報知情報を生成して運転者に対して報知することにより、車両制御を補助する装置となっている。以下に、この図1に従って、本実施形態に係る車両制御補助装置1の各部の構成について説明する。なお、この車両制御補助装置1の各機能部は、CPU等の演算処理装置を中核部材として、入力されたデータに対して種々の処理を行うための機能部がハードウエア又はソフトウエア(プログラム)或いはその両方で実装されて構成されている。
【0039】
撮像装置2は、自車両6の周囲を撮像可能に配置され、自車両6の進行方向に存在する先行車両7(図2参照)や停止目標地物8(図3参照)等を含む周囲の状況を撮像する。この撮像装置2としては、例えばCCDセンサやCMOSセンサ等の撮像素子と、この撮像素子に光を導くための光学系を構成するレンズ等を有した構成のものを用いることができる。ここで、停止目標地物8としては、例えば、交差点等に設けられた停止線、信号機、一時停止標識、横断歩道等が該当する。撮像装置2からの出力信号は画像情報処理部3に入力される。画像情報処理部3は、撮像装置2からの出力信号を画像処理し、自車両6の進行方向に存在する先行車両7又は停止目標地物8の有無、及び自車両6から先行車両7までの距離(現在車間距離La)又は停止目標地物8までの距離等についての画像認識を行う。そして、画像情報処理部3は、その画像認識結果の情報を演算処理部17へ出力する。
本実施形態においては、これらの撮像装置2及び画像情報処理部3は、本発明における「先行車両検出手段15」及び「停止目標地物検出手段16」を構成する。
【0040】
レーダ4は、自車両6の進行方向に存在する先行車両7(図2参照)を検出するとともに、この先行車両7との間の距離、すなわち現在車間距離Laを検出するために設けられている。このようなレーダ4としては、例えば、レーザレーダ、ミリ波レーダ、赤外線レーダ等を用いることができる。レーダ4からの出力信号はレーダ情報処理部5に入力される。レーダ情報処理部5は、レーダ4からの出力信号を処理して、先行車両7の有無、及び先行車両7との間の車間距離Laを検出し、その情報を演算処理部17へ出力する。
本実施形態においては、これらのレーダ4及びレーダ情報処理部5は、本発明における「先行車両検出手段15」を構成する。
【0041】
ロケーション部9は、GPS受信機10、方位センサ11、及び距離センサ12からの情報を取得する。ここで、GPS受信機10は、図示しないGPS衛星からの信号を受信する装置であり、受信した信号に基づいてGPS受信機10の位置(緯度及び経度)や日時等の各種情報を取得する。方位センサ11は、地磁気センサやジャイロセンサ、或いは、ハンドルの回転部に取り付けた光学的な回転センサや回転型の抵抗ボリューム、車輪部に取り付ける角度センサ等により構成され、自車両6の方位を検知する。距離センサ12は、車輪の回転数を検知する車速センサや自車両6の加速度を検知するヨー・Gセンサと、検知された加速度を2回積分する回路との組み合わせ等により構成され、自車両の移動距離を検知する。そして、ロケーション部9は、これらのGPS受信機10、方位センサ11及び距離センサ12から取得した情報に基づいて、公知の方法により自車両6の位置及び方位を特定する演算を行う。
【0042】
また、ロケーション部9は、上記のようにして特定された自車両6の位置及び方位に基づいて、地図データベース13から地図情報を取得する。そして、ロケーション部9は、取得された地図情報に基づいて、公知の手法によるマップマッチングを行い、自車両6の位置が地図情報に含まれる道路上に位置し、自車両6の方位が当該道路に沿った方向となるように修正を行う。このようにしてロケーション部9により特定された自車両6の位置及び方位は、自車位置情報及び自車方位情報として演算処理部17に出力される。
【0043】
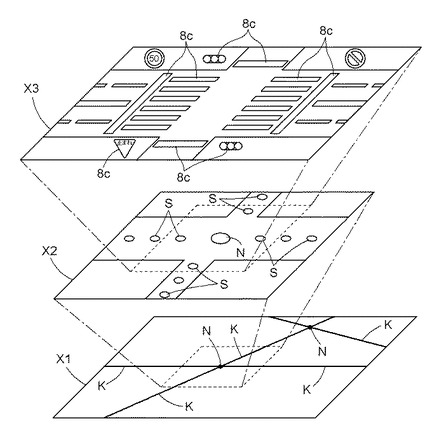
地図データベース13には地図情報が格納されている。図4は、地図データベース13に格納されている地図情報の内容を示す説明図である。この図に示すように、ここでは、地図情報として、道路ネットワークレイヤX1、道路情報レイヤX2、背景レイヤX3が格納されている。この地図データベース13は、例えば、ハードディスクドライブ、DVD−ROMを備えたDVDドライブ、CD−ROMを備えたCDドライブ等のように、情報を記憶可能な記録媒体とその駆動手段とを有する装置をハードウエア構成として備えている。
【0044】
道路ネットワークレイヤX1は、道路間の接続情報を示すレイヤである。具体的には、緯度及び経度で表現された地図上の位置情報を有する多数のノードNの情報と、2つのノードNを連結して道路を構成する多数のリンクKの情報とを有して構成されている。また、各リンクKは、そのリンク情報として、道路の種別(高速道路、有料道路、国道、県道等の種別)やリンク長さ等の情報を有している。
道路情報レイヤX2は、道路ネットワークレイヤX1に関連付けられて格納され、道路の詳細な情報を示すレイヤである。具体的には、道路ネットワークレイヤX1に関連付けられた各ノードNの情報、及び2つのノードNの間(リンクK上)に配置されて緯度及び経度で表現された地図上の位置情報を有する多数の形状補完点Sの情報を有して構成されている。
背景レイヤX3は、道路ネットワークレイヤX1及び道路情報レイヤX2に関連付けられて格納され、道路及びその周辺に設けられた各種地物や地図表示のための背景等の情報を示すレイヤである。具体的には、この背景レイヤX3に格納される情報には、例えば、交差点等に設けられた停止線、信号機、一時停止標識、横断歩道等の停止目標地物8となり得る地物8cの位置情報が含まれている。また、背景レイヤX3には、この他にも、道路標識、ペイント表示、建築物等の各種地物の位置や形状、道路形状等の各種情報が格納されている。
【0045】
また、ロケーション部9は、地図データベース13から停止目標地物8の位置情報を抽出するための停止目標地物位置抽出部14を備えている。この停止目標地物位置抽出部14は、自車両6の進行方向に存在する停止目標地物8の位置情報を抽出して取得する処理を行う。具体的には、停止目標地物位置抽出部14は、ロケーション部9において特定された自車位置情報及び自車方位情報に基づいて、地図データベース13に格納されている停止目標地物8となり得る地物8cの中から、自車両6の進行方向の所定距離内に存在する1又は2以上の地物8cを抽出し、それを停止目標地物8としてその種別情報(停止線、信号機、又は一時停止標識等)及び位置情報を取得する処理を行う。この際の地物8cを抽出する所定距離としては、例えば100m等に設定することができる。この停止目標地物位置抽出部14により取得された情報は、演算処理部17へ出力される。例えば、自車両6が図3に示す位置にある状況では、停止目標地物8としては、自車両6の進行方向に存在する停止線及び2機の信号機が抽出される。
本実施形態においては、この停止目標地物位置抽出部14及び地図データベース13は、本発明における「停止目標地物検出手段16」を構成する。
【0046】
車速センサ18は、自車両6の現在車速Vaを検出するセンサである。この車速センサ18としては、例えば、自車両6の変速機の出力軸やドライブシャフト等の回転数を検出する回転数検出センサ等が用いられる。そして、この車速センサ18は、その検出結果としての現在車速Vaの情報を演算処理部17へ出力する。
本実施形態においては、この車速センサ18が、本発明における「車速検出手段」を構成する。
【0047】
アクセルセンサ19は、アクセルペダル20の踏み込み量を検出することによりアクセル開度Afを検出するセンサである。ブレーキセンサ21は、ブレーキペダル22の踏力であるブレーキ踏力Bfを検出するセンサである。本実施形態においては、このブレーキセンサ21により検出されるブレーキ踏力Bfが、本発明における「ブレーキ操作量」に相当し、このブレーキセンサ21が本発明における「ブレーキ操作量検出手段」を構成する。そして、これらのアクセルセンサ19及びブレーキセンサ21は、その検出結果としてのアクセル開度Af及びブレーキ踏力Bfの情報を演算処理部17へ出力する。
【0048】
演算処理部17は、ナビゲーション用演算処理部23、減速目標点決定部24、目標車速決定部25、理想車速決定部26、理想ブレーキ操作量決定部27、及び報知情報生成部28を備えている。また、演算処理部17は、運転者に各種情報等を報知するための液晶表示ディスプレイ等の表示装置30や、スピーカ及びアンプ等の音声出力装置31等の報知装置に接続されている。更に、演算処理部17は、理想車速パターン情報を記憶している理想車速パターンデータベース32、及び理想ブレーキ操作量パターン情報を記憶している理想ブレーキ操作量パターンデータベース33にも接続されている。
【0049】
ナビゲーション用演算処理部23は、誘導経路の探索、自車位置表示、地図表示、経路案内等のナビゲーション装置としての処理を行う。すなわち、ナビゲーション用演算処理部23は、ロケーション部9から自車位置情報及び自車方位情報を取得するとともに、この自車位置情報及び自車方位情報に基づいてロケーション部9を介して地図データベース13から地図情報を取得する。そして、ナビゲーション用演算処理部23は、これらの自車位置情報、自車方位情報、及び地図情報を用いて、地図上に自車マークを重ねて表示する自車位置表示、地図表示、自車位置と目的地とを結ぶ誘導経路の探索、探索された誘導経路に従った経路案内等を行うための演算処理を行う。ここでは、ナビゲーション用演算処理部23は、表示装置30及び音声出力装置31を用いて演算結果の表示や音声出力等を行う構成となっている。また、目的地の設定や検索等の入力操作は、表示装置30と一体的に設けられたタッチパネルや図示しないリモートコントローラ等により行われる。
【0050】
減速目標点決定部24は、自車両6の減速制御の目標点である減速目標点Ptを決定する処理を行う。本実施形態においては、減速目標点決定部24は、自車両6の進行方向に先行車両7が検出された場合には当該先行車両7を基準とし、先行車両7が検出されない場合であって停止目標地物8が検出された場合には当該停止目標地物8を基準として、減速目標点Ptを決定する。
また、目標車速決定部25は、減速目標点Ptにおける目標車速Vtを決定する処理を行う。本実施形態においては、目標車速決定部25は、自車両6の進行方向に先行車両7が検出された場合には当該先行車両7の車速Vbを目標車速Vtとし(Vt=Vb)、先行車両7が検出されない場合であって停止目標地物8が検出された場合には目標車速をゼロとする(Vt=0)。
【0051】
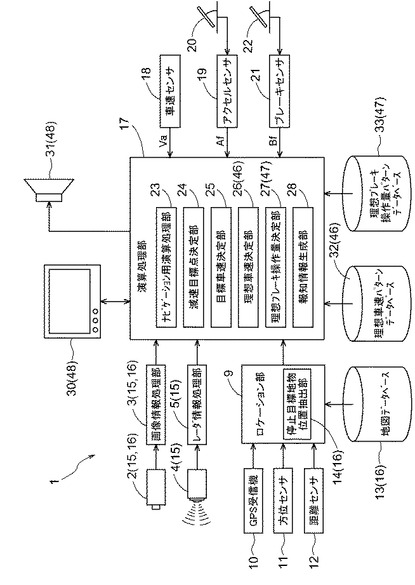
例えば、自車両6が図2に示すような状況にある場合、画像情報処理部3及びレーダ情報処理部5における処理の結果、自車両6の進行方向に存在する先行車両7が検出される。この場合、減速目標点決定部24は、先行車両7に対して所定の目標車間距離Lbを確保できる点を減速目標点Ptとして決定する。また、目標車速決定部25は、先行車両7の車速Vbを目標車速Vtとする(Vt=Vb)。ここで、目標車間距離Lbは、目標車速Vtに応じて定まる適正な車間距離として規定される。この目標車間距離Lbは、例えば、目標車速Vtに応じて予め定めたテーブル又はマップに従って決定し、或いは予め定めた目標車速Vtとの関係式を用いて演算して決定することができる。そして、減速目標点Ptは、先行車両7が走行中である場合には、図2(a)及び(b)に示すように、自車両6の速度が現在車速Vaから目標車速Vt(=Vb)まで減速する間に先行車両7も進行するので、それを考慮して定まる点となる。すなわち、自車両6の現在位置から減速目標点Ptまでの減速距離Ltは、現在車間距離Laと目標車間距離Lbとの差の距離に、自車両6と先行車両7との車間距離が現在車間距離Laから目標車間距離Lbに縮まり、かつ自車両6の車速が目標車速Vtに減速するまでの間に先行車両7が進む距離を加えた距離となる。具体的には、減速目標点Ptまでの減速距離Ltは、以下の式(1)により算出される。
Lt=(La−Lb)(Va+Vb)/(Va−Vb)・・・(1)
そして、減速目標点Ptは、自車両6の現在位置から進行方向に減速距離Ltだけ進んだ地点に決定される。
【0052】
なお、先行車両7の車速Vbは、画像情報処理部3及びレーダ情報処理部5における処理の結果に基づいて算出することができる。すなわち、画像情報処理部3及びレーダ情報処理部5における処理の結果として得られる車間距離Laの時間に従った変化量から自車両6と先行車両7との相対速度を算出することができる。そして、この相対速度と自車両6の現在車速Vaとから先行車両7の車速Vbを算出することができる。
また、先行車両7が停止中である場合(Vb=0)には、目標車速Vtもゼロとなり(Vt=0)、減速目標点Ptまでの減速距離Ltは、現在車間距離Laと目標車間距離Lbとの差の距離となる。この際の目標車間距離Lbは、ここでは特に停止車間距離と呼ぶこととする。この停止車間距離は、通常は、目標車速Vtに応じて定まる目標車間距離Lbの中で最も小さい値となる。
【0053】
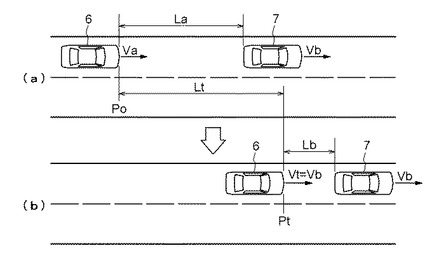
一方、例えば、自車両6が図3に示す状況にある場合、自車両6の進行方向に存在する先行車両7が検出されず、画像情報処理部3による画像認識処理の結果及びロケーション部9の停止目標地物位置抽出部14による停止目標地物8の抽出結果に基づいて、停止目標地物8としての停止線及び信号機が検出される。この場合、減速目標点決定部24は、停止目標地物8に応じた車両停止位置を減速目標点Ptとして決定する。また、目標車速決定部25は、目標車速Vtをゼロとする(Vt=0)。ここで、停止目標地物8に応じた車両停止位置は、停止目標地物8に応じて自車両6が停止すべき位置であり、地図データベース13に、停止目標地物8となり得る各地物8cに関する情報として予め格納されている。図3に示す例では、停止目標地物8として抽出された自車両6の進行方向に存在する停止線及び2機の信号機の全てについて、それらに応じた車両停止位置は、自車両6の前端が停止線のやや手前になるときの自車両6の位置となっている。またこの場合、減速目標点Ptまでの減速距離Ltは、ロケーション部9により特定された自車位置情報に示される自車両6の現在位置から停止目標地物8に応じた車両停止位置までの距離となる。なお、停止目標地物位置抽出部14により抽出された停止目標地物8に応じた車両停止位置が複数存在する場合には、自車両6の現在位置に最も近い車両停止位置を減速目標点Ptとして決定する。
【0054】
したがって、本実施形態においては、この減速目標点決定部24が本発明における「減速目標点決定手段」を構成し、目標車速決定部25が本発明における「目標車速決定手段」を構成する。
【0055】
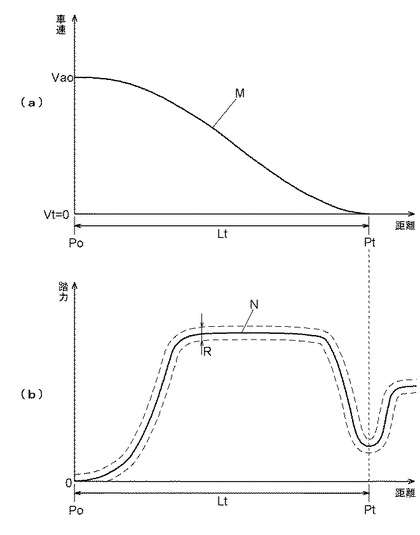
理想車速決定部26は、車速センサ18により検出された現在車速Va、減速目標点決定部24により決定された減速目標点Pt、及び目標車速決定部25により決定された目標車速Vtに基づいて、減速目標点Ptにおいて目標車速Vtとなるための目標減速点Ptまでの間の理想車速を決定する処理を行う。本実施形態においては、理想車速決定部26は、アクセルセンサ19によりアクセルオフが検出されたときに自車両6の減速が開始されたものと判断し、そのときの自車位置を減速制御の開始地点Po(図2及び図3参照)として、減速目標点Ptまでの間の理想車速を規定する理想車速線Mを決定する。図5(a)は、このように決定された理想車速線Mの一例であり、開始地点Poでの現在車速VaがVao、目標車速Vtがゼロ(Vt=0)である場合に、開始地点Poから減速目標点Ptまでの減速距離Lt間で減速するための理想車速線Mを示している。この理想車速線Mに規定されている車速が、減速目標点Ptまでの間の各地点での理想車速となる。
【0056】
本実施形態においては、理想車速決定部26は、理想車速パターンデータベース32に記憶されている複数の理想車速パターン情報の中から、一つの理想車速パターン情報を選択することにより理想車速線Mを決定する。図6は、理想車速パターンデータベース32に記憶されている理想車速パターン情報の例を示す図である。この図に示すように、理想車速パターンデータベース32には、開始地点Poから減速目標点Ptまでの減速距離Ltとの関係で車速を規定するものであって、開始地点Poでの現在車速Vao、目標車速Vt、及び減速距離Ltの条件がそれぞれ異なる複数の理想車速パターン情報が記憶されている。図6(a)は、目標車速Vtがゼロ(Vt=0)であって減速距離Ltが比較的十分にある場合における開始地点Poでの現在車速Vaoが3通りに異なる場合の理想車速パターン情報の例、図6(b)は、(a)に対して減速距離Ltが比較的少ない場合、図6(c)は、(a)に対して目標車速VtがゼロでなくVt1である場合(Vt=Vt1)の理想車速パターン情報の例をそれぞれ示している。なお、これらの図6(a)〜(c)に示す例は理想車速パターンデータベース32に記憶されている複数の理想車速パターン情報の中の一部の例であり、実際には、自車両6の走行状態として取り得るほぼ全ての状態を網羅できるだけの理想車速パターン情報を記憶しておくことが望ましい。
【0057】
理想車速決定部26は、これら複数の理想車速パターン情報の中から、現状の開始地点Poでの現在車速Vao、目標車速Vt、及び減速距離Ltに一致する理想車速パターン情報を選択し、当該選択された理想車速パターン情報を理想車速線Mとして決定する。この際、現状の開始地点Poでの現在車速Vao、目標車速Vt、及び減速距離Ltに一致する理想車速パターン情報が存在しない場合には、最も近い理想車速パターン情報を選択する。
本実施形態においては、この理想車速決定部26及び理想車速パターンデータベース32が、本発明における「理想車速決定手段46」を構成する。
【0058】
理想ブレーキ操作量決定部27は、車速センサ18により検出された現在車速Va、減速目標点決定部24により決定された減速目標点Pt、及び目標車速決定部25により決定された目標車速Vtに基づいて、減速目標点Ptにおいて目標車速Vtとなるための目標減速点Ptまでの間の理想ブレーキ操作量を決定する処理を行う。本実施形態においては、理想ブレーキ操作量決定部27は、アクセルセンサ19によりアクセルオフが検出されたときに自車両6の減速が開始されたものと判断し、そのときの自車位置を開始地点Po(図2及び図3参照)として、減速目標点Ptまでの間の理想ブレーキ操作量としての理想ブレーキ踏力を規定する理想ブレーキ踏力線Nを決定する。またここでは、理想ブレーキ踏力線Nに対応する理想ブレーキ踏力範囲Rも同時に決定する。図5(b)は、このように決定された理想ブレーキ踏力線N及び理想ブレーキ踏力範囲Rの一例であり、開始地点Poでの現在車速VaがVao、目標車速Vtがゼロ(Vt=0)である場合に、開始地点Poから減速目標点Ptまでの減速距離Lt間で減速するための理想ブレーキ踏力線N及び理想ブレーキ踏力範囲Rを示している。この理想ブレーキ踏力線Nに対応する理想ブレーキ踏力範囲R内のブレーキ踏力が、減速目標点Ptまでの間の各地点での理想ブレーキ踏力の範囲となる。
【0059】
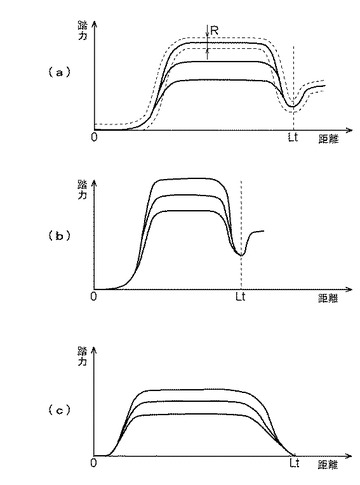
本実施形態においては、理想ブレーキ操作量決定部27は、理想ブレーキ操作量パターンデータベース33に記憶されている複数の理想ブレーキ踏力パターン情報の中から、一つの理想ブレーキ踏力パターン情報を選択することにより理想ブレーキ踏力線Nを決定する。図7は、理想ブレーキ操作量パターンデータベース33に記憶されている理想ブレーキ踏力パターン情報の例を示す図である。この図に示すように、理想ブレーキ操作量パターンデータベース33には、開始地点Poから減速目標点Ptまでの減速距離Ltとの関係でブレーキ踏力を規定するものであって、開始地点Poでの現在車速Vao、目標車速Vt、及び減速距離Ltの条件がそれぞれ異なる複数の理想ブレーキ踏力パターン情報が記憶されている。この際の各理想ブレーキ踏力パターン情報についての条件は上述した複数の理想車速パターン情報の条件に揃えられている。そして、各理想ブレーキ踏力パターン情報は、理想車速パターンデータベース32に記憶されている複数の理想車速パターン情報と一対一に関連付けられて記憶されている。
【0060】
図7(a)〜(c)に示されている複数の理想ブレーキ踏力パターン情報のそれぞれは、図6(a)〜(c)に示されている各理想車速パターン情報に対応している。そして、理想ブレーキ踏力パターン情報は、同じ減速距離Ltであっても開始地点Poでの現在車速Vaoが高いほど、すなわち対応する理想車速パターン情報の傾斜が急であるほど、高いブレーキ踏力となるように規定されている。また、図7(a)及び(b)に示されている理想ブレーキ踏力パターン情報の条件では目標車速Vtがゼロ(Vt=0)であるので、理想ブレーキ踏力パターン情報は、減速距離Ltの終点(減速目標点Pt)付近で一旦ブレーキ踏力が低くなった後に再度ブレーキ踏力が高くなっており、自車両6を停止状態に維持するようになっている。これに対して図7(c)に示されている理想ブレーキ踏力パターン情報の条件では目標車速Vtがゼロでなく、自車両6は減速した後も走行状態を継続するので、減速距離Ltの終点(減速目標点Pt)でブレーキ踏力はゼロとなっている。これらの図7(a)〜(c)に示す例も、理想ブレーキ操作量パターンデータベース33に記憶されている複数の理想ブレーキ踏力パターン情報の中の一部の例であり、実際には、自車両6の走行状態として取り得るほぼ全ての状態を網羅できるだけの理想ブレーキ踏力パターン情報を記憶しておくことが望ましい。
【0061】
また、理想ブレーキ操作量パターンデータベース33には、複数の理想ブレーキ踏力パターン情報のそれぞれについて理想ブレーキ踏力範囲情報が関連付けられて記憶されている。図7では、煩雑になることを避けるために、図7(a)の一つの理想ブレーキ踏力パターン情報についての理想ブレーキ踏力範囲情報のみを図示しているが、実際には、複数の理想ブレーキ踏力パターン情報の全てについて同様に、理想ブレーキ踏力範囲の情報が関連付けられて記憶されている。
【0062】
理想ブレーキ操作量決定部27は、これら複数の理想ブレーキ踏力パターン情報の中から、理想車速決定部26により選択された理想車速パターン情報に関連付けられた理想ブレーキ踏力パターン情報を選択し、当該選択された理想ブレーキ踏力パターン情報を理想ブレーキ踏力線Nとして決定する。これにより、理想ブレーキ操作量決定部27は、開始地点Poでの現在車速Vao、目標車速Vt、及び減速距離Ltに基づく一つの理想ブレーキ踏力パターン情報を選択することになる。また、理想ブレーキ操作量決定部27は、選択された理想ブレーキ踏力パターン情報に関連付けられて記憶されている理想ブレーキ踏力範囲情報を理想ブレーキ踏力範囲Rとして決定する。
本実施形態においては、理想ブレーキ踏力パターン情報及び理想ブレーキ踏力範囲情報が本発明における「理想ブレーキ操作量パターン情報」に相当し、理想ブレーキ操作量決定部27及び理想ブレーキ操作量パターンデータベース33が本発明における「理想ブレーキ操作量決定手段47」を構成する。
【0063】
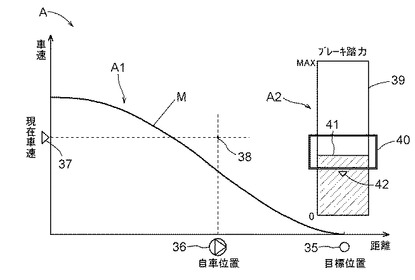
報知情報生成部28は、理想車速線Mにより規定される理想車速と車速センサ18により検出される現在車速Vaとの関係、並びに理想ブレーキ踏力線N及び理想ブレーキ踏力範囲Rにより規定される理想ブレーキ踏力とブレーキセンサ21により検出される現在のブレーキ踏力Bfとの関係を示す報知情報Aを生成する処理を行う。図8は、本実施形態に係る報知情報Aの例を示す図である。この図に示すように、ここでは、報知情報Aは、表示装置30に表示するための画像情報であり、理想車速と現在車速Vaとの差、及び理想ブレーキ踏力範囲Rと現在のブレーキ踏力Bfとの差を表示し、自車両6の運転者に報知する情報となっている。また、図8に示す報知情報Aは、図5に示す理想車速線M並びに理想ブレーキ踏力線N及び理想ブレーキ踏力範囲Rが決定された場合、すなわち減速目標点Ptでの目標車速Vtがゼロ(Vt=0)である場合の例を示している。
【0064】
図8に示す報知情報Aは、理想車速線Mと現在車速Vaとを対比可能に表示する車速表示情報A1と、理想ブレーキ踏力範囲Rと現在のブレーキ踏力Bfとを対比可能に表示するブレーキ踏力表示情報A2とを有して構成されている。具体的には、車速表示情報A1は、横軸を距離、縦軸を車速とするグラフ上に理想車速線Mを表示している。また、横軸に沿って減速目標点Ptを表す目標位置表示35及び自車位置を表す自車位置表示36を配置している。更に、縦軸に沿って現在車速Vaを表す現在車速表示37を配置している。そして、自車位置と現在車速Vaとの交点38により自車両6の現在位置及び現在車速Vaを理想車速線Mと対比可能に表示している。一方、ブレーキ踏力表示情報A2は、ブレーキ踏力の最大値(MAX)から最小値(0)までのブレーキ踏力領域を表す長方形状の踏力領域表示39を有している。また、この踏力領域表示39上に、理想ブレーキ操作量決定部27において決定された理想ブレーキ踏力範囲Rを表す理想踏力範囲表示40と、現在のブレーキ踏力Bfを表す現在踏力表示41とを対比可能に表示している。更に、理想踏力範囲表示40の上又は下にブレーキ踏力Bfの変化方向を表示する変化方向表示42を配置している。
本実施形態においては、報知情報生成部28が本発明における「報知情報生成手段」を構成する。
【0065】
報知情報生成部28により生成された報知情報Aは、表示装置30に表示される。これにより、報知情報Aは自車両6の運転者に対して報知される。したがって、本実施形態においては、表示装置30が本発明における「報知手段48」を構成する。
【0066】
次に、本実施形態に係る車両制御補助装置1による車両制御補助方法について説明する。図9は、本実施形態に係る車両制御補助装置1の全体の動作処理を示すフローチャートである。図10は、図9のステップ#02の減速目標点Pt及び目標車速Vtを決定する処理の詳細を示すフローチャートである。図11は、図10のステップ#03の減速目標点Ptまでの理想車速及び理想ブレーキ踏力を決定する処理の詳細を示すフローチャートである。以下、これらのフローチャートに従って説明する。
【0067】
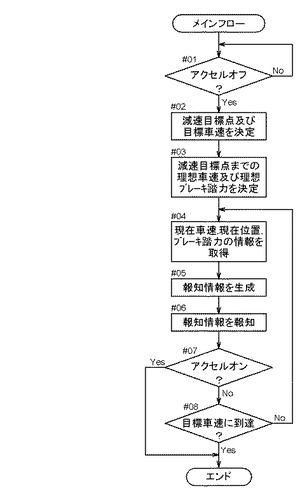
図9に示すように、本実施形態に係る車両制御補助装置1は、まず、アクセルセンサ19により検出されるアクセル開度Afに基づいて、アクセルオフの操作がなされたか否かについて判断する(ステップ#01)。アクセルオフの操作がなされない状態では(ステップ#01:NO)、自車両6は減速しないと判断できるので、以降の処理には進まない。そして、アクセルオフの操作がなされた場合には(ステップ#01:YES)、自車両6が減速すると判断できるので、次に、減速目標点決定部24及び目標車速決定部25において、減速目標点Pt及び目標車速Vtを決定する処理を行う(ステップ#02)。このステップ#02の処理については、図10のフローチャートに基づいて後に詳細に説明する。次に、車両制御補助装置1は、理想車速決定部26及び理想ブレーキ操作量決定部27において、車速センサ18により検出された現在車速Va、並びにステップ#02で決定された減速目標点Pt及び目標車速Vtに基づいて、減速目標点Ptにおいて目標車速Vtとなるための目標減速点Ptまでの間の理想車速及び理想ブレーキ操作量を決定する処理を行う(ステップ#03)。このステップ#03の処理については、図11のフローチャートに基づいて後に詳細に説明する。
【0068】
次に、車両制御補助装置1は、車速センサ18からの現在車速Vaの情報、ロケーション部9からの自車位置情報に基づく現在位置の情報、及びブレーキセンサ21からのブレーキ踏力Bfの情報を取得する(ステップ#04)。そして、報知情報生成部28において報知情報Aを生成し(ステップ#05)、生成された報知情報Aを表示装置30に表示することにより報知する(ステップ#06)。その後、車両制御補助装置1は、アクセルセンサ19により検出されるアクセル開度Afに基づいて、アクセルオンの操作がなされたか否かについて判断する(ステップ#07)。アクセルオンの操作がなされない場合には(ステップ#07:NO)、自車両6の減速制御が継続していると判断できる。そこで次に、自車両6の現在車速Vaが目標車速Vtに到達したか否かについて判断する(ステップ#08)。そして、現在車速Vaが目標車速Vtに到達していない場合には(ステップ#08:NO)、処理はステップ#04へ戻り、新たに現在車速Vaの情報、現在位置の情報及びブレーキ踏力Bfの情報を取得し、報知情報Aの内容を更新して表示装置により報知する(ステップ#04〜#06)。これらのステップ#04〜#08の処理は、所定の時間間隔で繰り返し行われる。なお、このステップ#04〜#08の処理が繰り返し行われる所定の時間間隔は、例えば、10〜50ms程度とすることができる。そして、アクセルオンの操作がなされた場合には(ステップ#07:YES)、自車両6が加速すると判断できるので、減速制御のための本車両制御補助装置1による処理を終了する。また、現在車速Vaが目標車速Vtに到達した場合には(ステップ#08:YES)、減速制御が終了したと判断できるので本車両制御補助装置1による処理を終了する。
【0069】
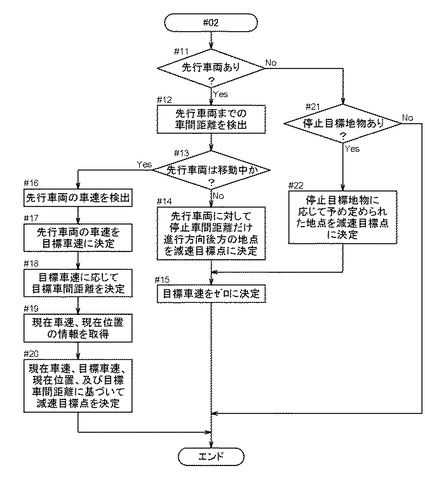
次に、ステップ#02の減速目標点Pt及び目標車速Vtを決定する処理について詳細に説明する。この処理は、演算処理部17の減速目標点決定部24及び目標車速決定部25において行われる。図10に示すように、この処理では、まず、画像情報処理部3及びレーダ情報処理部5における処理の結果、自車両6の進行方向に先行車両7が検出されるか否かについて判断する(ステップ#11)。先行車両7が検出された場合には(ステップ#11:YES)、画像情報処理部3及びレーダ情報処理部5における処理の結果に基づいて、先行車両7までの現在車間距離Laを検出する(ステップ#12)。次に、先行車両7が移動中であるか否かについて判断する(ステップ#13)。この判断は、車速センサ18により検出される現在車速Vaと、ステップ#12で検出される現在車間距離Laの変化量とに基づいて行うことができる。すなわち、現在車間距離Laの減少量が現在車速Vaによる自車両6の進行距離とほぼ同じである場合には先行車両7は停止中であり、それ以外の場合には先行車両7は移動中であると判断できる。
【0070】
先行車両7が停止中である場合には(ステップ#13:NO)、減速目標点決定部24において、先行車両7に対して所定の停止車間距離だけ進行方向後方の地点を減速目標点Ptに決定する(ステップ#14)。ここで、停止車間距離は、上記のとおり、目標車速Vtがゼロの場合(Vb=0)における、目標車速Vtに応じて定まる目標車間距離Lbの値である。その後、目標車速決定部25において、先行車両7の車速Vb(Vb=0)に合わせて目標車速Vtをゼロに決定する(ステップ#15)。これにより処理は終了する。
【0071】
一方、ステップ#13の判断の結果、先行車両7が移動中である場合には(ステップ#13:YES)、先行車両7の車速Vbを検出する(ステップ#16)。この先行車両7の車速Vbは、上述のとおり、画像情報処理部3及びレーダ情報処理部5における処理の結果として得られる車間距離Laの時間に従った変化量に基づいて算出することができる。次に、目標車速決定部25において、先行車両7の車速Vbを自車両6の目標車速Vtに決定する(ステップ#17)。そして、目標車速Vtに応じて目標車間距離Lbを決定する(ステップ#18)。その後、車速センサ18からの現在車速Vaの情報、及びロケーション部9からの自車位置情報に基づく現在位置の情報を取得する(ステップ#19)。ここで取得される現在位置は、アクセルオフが検出されたとき(ステップ#01)の自車位置であり、減速制御の開始地点Po(図2及び図3参照)となる。そして、減速目標点決定部24において、現在車速Va、目標車速Vt、現在位置(開始地点Po)、及び目標車間距離Lbに基づいて、減速目標点Ptを決定する(ステップ#20)。具体的には、減速目標点決定部24は、上述のとおり、現在位置から減速目標点Ptまでの減速距離Ltを上記の式(1)により算出し、自車両6の現在位置から進行方向に減速距離Ltだけ進んだ地点を減速目標点Ptとして決定する処理を行う。
【0072】
また、ステップ#11の判断の結果、先行車両7が検出されない場合には(ステップ#11:NO)、画像情報処理部3による画像認識処理の結果及びロケーション部9の停止目標地物位置抽出部14による停止目標地物8の抽出結果に基づいて、停止目標地物8が検出されるか否かについて判断する(ステップ#21)。停止目標地物8が検出されない場合には(ステップ#21:NO)、処理は終了する。停止目標地物8が検出された場合には(ステップ#21:YES)、減速目標点決定部24において、当該検出された停止目標地物8に応じて定められた地点を減速目標点Ptに決定する(ステップ#22)。具体的には、減速目標点決定部24は、上述のとおり、停止目標地物8に応じて予め定められた車両停止位置を減速目標点Ptとして決定する。その後、処理はステップ#15へ進み、目標車速決定部25において、目標車速Vtをゼロに決定する(ステップ#15)。これにより処理は終了する。
【0073】
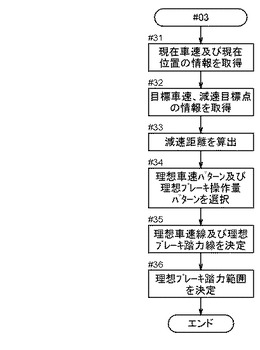
次に、ステップ#03の減速目標点Ptまでの理想車速及び理想ブレーキ踏力を決定する処理について詳細に説明する。この処理は、演算処理部17の理想車速決定部26及び理想ブレーキ操作量決定部27において行われる。図11に示すように、この処理では、まず、車速センサ18からの現在車速Vaの情報、及びロケーション部9からの自車位置情報に基づく現在位置の情報を取得する(ステップ#31)。ここで取得される現在位置は、アクセルオフが検出されたとき(ステップ#01)の自車位置であり、減速制御の開始地点Po(図2及び図3参照)となる。次に、上記ステップ#02で決定された減速目標点Pt及び目標車速Vtの情報を取得する(ステップ#32)。そして、現在位置(開始地点Po)及び減速目標点Ptの情報から開始地点Poから減速目標点Ptまでの減速距離Ltを算出する(ステップ#33)。次に、現在車速Va、目標車速Vt、及び減速距離Ltに基づいて、理想車速パターンデータベース32から理想車速パターン情報を選択し、当該選択された理想車速パターン情報に関連付けられた理想ブレーキ踏力パターン情報を理想ブレーキ操作量パターンデータベース33から選択する(ステップ#34)。そして、ステップ#34で選択された理想車速パターン情報を理想車速線Mとして決定し、ステップ#34で選択された理想ブレーキ踏力パターン情報を理想ブレーキ踏力線Nとして決定する(ステップ#35)。また、ステップ#34で選択された理想ブレーキ踏力パターン情報に関連付けられて記憶されている理想ブレーキ踏力範囲情報を理想ブレーキ踏力範囲Rとして決定する(ステップ#36)。このようにして決定された理想車速線Mに規定されている車速が、現在位置(開始地点Po)から減速目標点Ptまでの間の各地点での理想車速となる。また、決定された理想ブレーキ踏力線Nに対応する理想ブレーキ踏力範囲R内のブレーキ踏力が、現在位置(開始地点Po)から減速目標点Ptまでの間の各地点での理想ブレーキ踏力の範囲となる。
【0074】
〔第二の実施形態〕
次に、本発明の第二の実施形態に係る車両制御補助装置1について説明する。本実施形態に係る車両制御補助装置1は、報知情報生成部28により生成する報知情報Aの内容において上記第一の実施形態とは異なる。その他の構成については、上記第一の実施形態と同様とすることができる。
【0075】
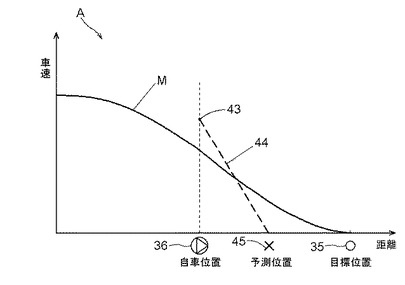
図12は、本実施形態に係る報知情報Aの例を示す図である。この図に示すように、ここでは、報知情報Aは、表示装置30に表示するための画像情報であり、理想車速と現在車速Vaとの関係、及び理想車速と現在のブレーキ踏力Bfに基づく将来の予想車速との関係を表示する情報となっている。また、この報知情報Aは、現在のブレーキ踏力Bfで減速した場合に目標車速Vtとなる将来の予想減速点の位置を示す情報を更に含んでいる。この図12に示す報知情報Aは、図5に示す理想車速線M並びに理想ブレーキ踏力線N及び理想ブレーキ踏力範囲Rが決定された場合、すなわち減速目標点Ptでの目標車速Vtがゼロ(Vt=0)である場合の例を示している。なお、本実施形態においても、上記第一の実施形態と同様に、ブレーキセンサ21により検出されるブレーキ踏力Bfが、本発明における「ブレーキ操作量」に相当する。
【0076】
図12に示す報知情報Aは、理想車速線Mと現在車速Vaとを対比可能に表示する情報となっている。また、報知情報Aは、理想車速と現在のブレーキ踏力Bfに基づく将来の予想車速とを対比可能に表示するとともに、減速目標点Ptの位置と現在のブレーキ踏力Bfで減速した場合に目標車速Vtとなる将来の予想減速点の位置とを対比可能に表示する構成となっている。具体的には、報知情報Aは、横軸を距離、縦軸を車速とするグラフ上に理想車速線Mを表示している。また、横軸に沿って減速目標点Ptを表す目標位置表示35及び自車位置を表す自車位置表示36を配置している。そして、自車位置表示36の上方に、現在位置及び現在車速Vaを表すグラフ上の点である現在車速・位置表示43を配置している。これにより、自車両6の現在位置及び現在車速Vaを理想車速線Mと対比可能に表示している。更に、報知情報Aは、現在車速・位置表示43を起点とし、現在のブレーキ踏力Bfに基づく将来の予想車速を表示する予想車速線表示44を有している。これにより、理想車速と現在のブレーキ踏力Bfに基づく将来の予想車速とを対比可能に表示している。そして、この予想車速線表示44が横軸と交差する点に、現在のブレーキ踏力Bfで減速した場合に目標車速Vtとなる将来の予想減速点の位置を表示する予想位置表示45を配置している。これにより、減速目標点Ptの位置と現在のブレーキ踏力Bfで減速した場合に目標車速Vtとなる将来の予想減速点の位置とを対比可能に表示している。
【0077】
このようにして報知情報生成部28により生成された報知情報Aは、表示装置30に表示される。これにより、報知情報Aは自車両6の運転者に対して報知される。
【0078】
〔第三の実施形態〕
次に、本発明の第三の実施形態に係る車両制御補助装置1について説明する。本実施形態に係る車両制御補助装置1は、減速目標点Ptまでの間の理想車速を決定することなく、減速目標点Ptにおいて目標車速Vtとなるための減速目標点Ptまでの間の理想ブレーキ操作量のみを決定し、報知情報Aとして、理想ブレーキ操作量と現在のブレーキ操作量Bfとの関係を示す情報を生成する構成である点で上記第一の実施形態とは異なる。このため、本実施形態に係る車両制御補助装置1では、理想車速決定部26を備える必要がない点でも上記第一の実施形態とは異なる。その他の構成については、上記第一の実施形態と同様とすることができる。
【0079】
本実施形態においては、理想ブレーキ操作量決定部27は、理想ブレーキ操作量パターンデータベース33に記憶されている複数の理想ブレーキ踏力パターン情報の中から、現状の開始地点Poでの現在車速Vao、目標車速Vt、及び減速距離Ltに一致する理想ブレーキ踏力パターン情報を選択し、当該選択された理想ブレーキ踏力パターン情報を理想ブレーキ踏力線Nとして決定する。この際、現状の開始地点Poでの現在車速Vao、目標車速Vt、及び減速距離Ltに一致する理想ブレーキ踏力パターン情報が存在しない場合には、最も近い理想ブレーキ踏力パターン情報を選択する。また、理想ブレーキ操作量決定部27は、選択された理想ブレーキ踏力パターン情報に関連付けられて記憶されている理想ブレーキ踏力範囲情報を理想ブレーキ踏力範囲Rとして決定する。
【0080】
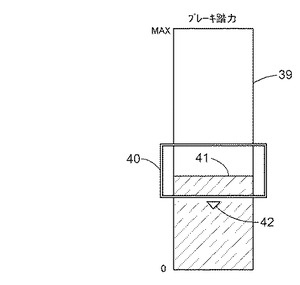
報知情報生成部28は、理想ブレーキ踏力線N及び理想ブレーキ踏力範囲Rにより規定される理想ブレーキ踏力とブレーキセンサ21により検出される現在のブレーキ踏力Bfとの関係を示す報知情報Aを生成する処理を行う。図13は、本実施形態に係る報知情報Aの例を示す図である。この図に示すように、ここでは、報知情報Aは、表示装置30に表示するための画像情報であり、理想ブレーキ踏力範囲Rと現在のブレーキ踏力Bfとの差を表示し、自車両6の運転者に報知する情報となっている。
【0081】
図13に示す報知情報Aは、理想ブレーキ踏力範囲Rと現在のブレーキ踏力Bfとを対比可能に表示する情報であって、ここでは、上記第一の実施形態に係る図8に示される報知情報Aのブレーキ踏力表示情報A2と同様の構成を有している。すなわち、この報知情報Aは、ブレーキ踏力の最大値(MAX)から最小値(0)までのブレーキ踏力領域を表す長方形状の踏力領域表示39を有している。また、この踏力領域表示39上に、理想ブレーキ操作量決定部27において決定された理想ブレーキ踏力範囲Rを表す理想踏力範囲表示40と、現在のブレーキ踏力Bfを表す現在踏力表示41とを対比可能に表示している。更に、理想踏力範囲表示40の上又は下にブレーキ踏力Bfの変化方向を表示する変化方向表示42を配置している。
【0082】
〔第四の実施形態〕
次に、本発明の第四の実施形態に係る車両制御補助装置1について説明する。本実施形態に係る車両制御補助装置1は、減速目標点Ptまでの間の理想ブレーキ操作量を決定することなく、減速目標点Ptにおいて目標車速Vtとなるための減速目標点Ptまでの間の理想車速のみを決定し、報知情報Aとして、理想車速と現在車速Vaとの関係を示す情報を生成する構成である点で上記第一の実施形態とは異なる。このため、本実施形態に係る車両制御補助装置1では理想ブレーキ操作量決定部27を備える必要がない点でも上記第一の実施形態とは異なる。その他の構成については、上記第一の実施形態と同様とすることができる。
【0083】
本実施形態においては、報知情報生成部28は、理想車速線Mにより規定される理想車速と車速センサ18により検出される現在車速Vaとの関係を示す報知情報Aを生成する処理を行う。具体的には、図示は省略するが、上記第一の実施形態に係る図8に示される報知情報Aの車速表示情報A1と同様の構成を有する情報とすることができる。
【0084】
〔第五の実施形態〕
次に、本発明の第五の実施形態に係る車両制御補助装置1について説明する。本実施形態に係る車両制御補助装置1は、図示は省略するが、理想ブレーキ踏力と現在のブレーキ踏力との差、及び理想車速と現在車速との差に基づいて、理想ブレーキ踏力を補正する理想ブレーキ操作量補正部を演算処理部17内に更に備える点で、上記第一の実施形態とは異なる。その他の構成については、上記第一の実施形態と同様とすることができる。すなわち、ブレーキ操作量に対する車速の変化の程度は、道路状況、道路勾配、天候等に応じて変化することが多い。この理想ブレーキ操作量補正部は、このようなブレーキ操作量に対する車速変化のずれを補正するものである。
【0085】
本実施形態においては、理想ブレーキ操作量補正部は、ブレーキセンサ21により検出される現在のブレーキ踏力Bfが、理想ブレーキ踏力範囲R内にあるにも関わらず、車速センサ18により検出される現在車速Vaが、理想車速線Mにより規定される理想車速と同様の変化をしない場合に、理想ブレーキ踏力線N及び理想ブレーキ踏力範囲Rを補正する処理を行う。この際、理想ブレーキ操作量補正部は、自車両6の進行距離に対する現在車速Vaの変化量と理想車速線Mにより規定される理想車速の変化量との差に応じて定まる補正係数を用いる。そして、この補正係数を、理想ブレーキ踏力線Nの各地点での値に乗算することにより、理想ブレーキ踏力線Nに規定される理想ブレーキ踏力を各地点での値に応じて増減させて補正する。この際、理想ブレーキ踏力範囲Rは、その幅は変化させずに理想ブレーキ踏力線Nの補正量に合わせて補正する。
本実施形態においては、理想ブレーキ操作量補正部が本発明における「理想ブレーキ操作量補正手段」を構成する。
【0086】
〔第六の実施形態〕
次に、本発明の第六の実施形態に係る車両制御補助装置1について説明する。本実施形態に係る車両制御補助装置1は、図示は省略するが、報知情報Aの内容に基づいてブレーキ量及び車速の一方又は双方を自動制御する自動制御部を演算処理部17内に更に備えている点で、上記第一の実施形態とは異なる。この自動制御部は、車両制御装置等を介して自車両6のブレーキ装置やスロットル装置等に接続され、これらを制御可能に構成されている。その他の構成については、上記第一の実施形態と同様とすることができる。そして、前記自動制御部は、表示装置30(報知手段48の一例)による報知情報Aの報知中に、報知情報Aの内容を含む自車両の状態が所定の条件を満たすときに、自車両6のブレーキ量及び車速の一方又は双方の自動制御を実行する処理を行う。なお、本実施形態においては、自動制御部が本発明における「自動制御手段」を構成する。
【0087】
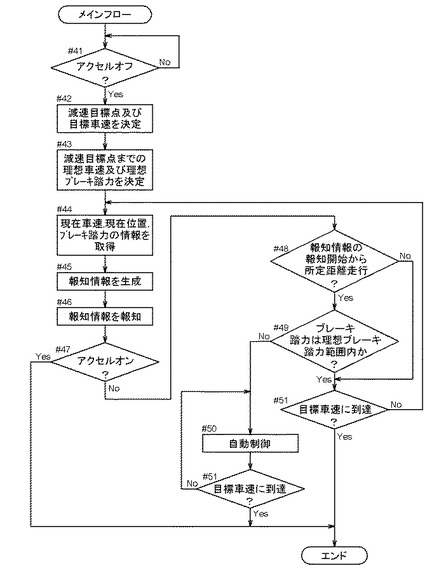
図14は、本実施形態に係る車両制御補助装置1の動作処理の一例を示すフローチャートである。本例では、自動制御部は、表示装置30による報知情報Aの報知開始から予め定めた所定距離を走行した時点において、ブレーキ踏力Bfが理想ブレーキ踏力範囲R内でない場合に、自車両6のブレーキ量及び車速の一方又は双方の自動制御を実行する処理を行う。
【0088】
この図14に示すフローチャートのステップ#41〜#47については、上記第一の実施形態に係る図9のステップ#01〜#07と同様であるので、説明は省略する。そして本例では、ステップ#45において生成された報知情報Aを表示装置30に表示することにより報知した後(ステップ#46)、アクセルオンの操作がなされない場合には(ステップ#47:NO)、表示装置30による最初の報知情報Aの報知開始から、自車両6が予め定めた所定距離を走行したか否かについて判断する(ステップ#48)。ここで、所定距離は、減速目標点Ptまでの減速距離Lt以下の距離で設定することが可能であり、例えば前記減速距離Ltの2分の1等とすることができる。そして、報知情報Aの報知開始から所定距離を走行した場合には(ステップ#48:YES)、ステップ#44で取得した現在のブレーキ踏力Bfが、ステップ#43で決定した理想ブレーキ踏力範囲Rであるか否かについて判断する(ステップ#49)。
【0089】
そして、ブレーキ踏力Bfが理想ブレーキ踏力範囲Rでない場合には(ステップ#49:NO)、自動制御部によりブレーキ量及び車速の一方又は双方の自動制御を行う(ステップ#50)。そして、自車両6の現在車速Vaが目標車速Vtに到達するまで(ステップ#51:YES)、自動制御を継続する。自動制御部による自動制御では、ステップ#43において決定された理想ブレーキ操作量(理想ブレーキ踏力線N)に近づけるようにブレーキ量の制御を行い、又はステップ#43において決定された理想車速(理想車速線M)に近づけるように車速の制御を行う。一方、報知情報Aの報知開始から所定距離を走行していない場合(ステップ#48:NO)、又はブレーキ踏力Bfが理想ブレーキ踏力範囲Rである場合(ステップ#49:YES)には、処理はステップ#51へ進む。このステップ#51の処理は、上記第一の実施形態に係る図9のステップ#08と同様であるので、説明は省略する。
【0090】
また、上記の例以外にも、自動制御部は、表示装置30による報知情報Aの報知開始から予め定めた所定時間が経過した時点において、現在のブレーキ踏力Bfが理想ブレーキ踏力範囲R内でない場合に自動制御を実行する処理を行う構成や、現在のブレーキ踏力Bfが理想ブレーキ踏力範囲R内でない時間が所定時間以上継続した場合に自動制御を実行する処理を行う構成とすることも好適な実施形態の一つである。
【0091】
本実施形態に係る車両制御補助装置1によれば、報知情報Aの報知を行ったにも関わらず運転者による適切なブレーキ操作等が行われない場合に、自動制御部による制御によって、適切に自車両6のブレーキ量及び車速の一方又は双方を制御することができる。
【0092】
また、自動制御部による自動制御(ステップ#50)を開始した後、更に所定距離を走行した後や更に所定時間が経過した後に、自動制御を終了し、報知情報Aの報知のみを行う処理とすることも好適な実施形態の一つである。また、アクセルオフの操作がなされた後(ステップ#41:YES)、すぐに自動制御部による自動制御を開始し、その後所定距離を走行した後や所定時間が経過した後に、自動制御を終了し、報知情報Aの報知のみを行う処理とすることも好適な実施形態の一つである。このような処理とすることにより、減速制御の最終段階では、運転者が自ら操作を行うことになるので、運転者の好みに合った車両制御が行われることになる。
【0093】
また、自動制御部による自動制御中は、表示装置30による報知情報Aの報知を中断することも可能であるが、自動制御中も報知情報Aの報知を継続することも好適な実施形態の一つである。この際、現在のブレーキ踏力Bfの表示は、自動制御部により制御されているブレーキ量に対応する表示が行われる。また、自動制御部による自動制御中は、表示装置30や音声出力装置31等により、自動制御中であることを運転者に報知する制御を行うと好適である。その場合、例えば、表示装置30に「現在自動制御中」との文字を表示し、或いは音声出力装置31により「現在自動制御中です」との案内音声を出力したりすることができる。
【0094】
〔その他の実施形態〕
(1)上記の各実施形態においては、表示装置30を報知手段48とし、報知情報Aは表示装置30に表示するための画像情報とする場合について説明した。しかし、本発明に係る報知手段48は表示装置30に限定されるものではなく、報知情報Aを音声により報知する音声出力装置31や、報知情報Aを振動により報知するシート等に設けた振動発生装置(図示省略)等を報知手段48とすることも、本発明の好適な実施形態の一つである。
例えば、音声出力装置31を報知手段48とする場合、理想車速と現在車速Vaとの差や理想ブレーキ踏力と現在のブレーキ踏力Bfとの差等に応じて異なる音量、音質、音声パターン等の音声情報を出力する。ここで、車速の差やブレーキ踏力の差には、その差の絶対値に加えてその差の方向(理想値に対する上下関係)を含むものとする。このような音声情報を報知情報Aとして音声出力装置31から出力することにより、自車両6の運転者に対して、理想車速と現在車速Vaとの差や理想ブレーキ踏力と現在のブレーキ踏力Bfとの差を報知することができる。
また、振動発生装置を報知手段48とする場合においても同様に、理想車速と現在車速Vaとの差や理想ブレーキ踏力と現在のブレーキ踏力Bfとの差等に応じて異なる振幅、振動数、振動パターン等の振動情報を出力する。
また、報知手段48が、上記の画像、音声、及び振動の2つ以上を組み合わせて報知する構成とすることも好適な実施形態の一つである。
【0095】
(2)また、報知情報を、自車両6の運転者に対してではなく、自車両6の車両制御装置に対して報知する情報とすることも本発明の好適な実施形態の一つである。この場合、報知情報生成手段は、理想ブレーキ操作量と現在のブレーキ操作量との関係、及び理想車速と前記現在車速との関係の一方又は双方を示す情報を、車両制御装置に対して出力可能な形式の報知情報として生成する。またこの場合、報知手段は、報知情報生成手段を構成する演算処理部と車両制御装置とをつなぐ通信装置等により構成される。これにより、自車両6の車両制御装置は、理想ブレーキ操作量と現在のブレーキ操作量との関係、及び理想車速と前記現在車速との関係の一方又は双方を示す情報を取得することができる。したがって、車両制御装置は、ブレーキ装置に対して、現在のブレーキ操作量を理想ブレーキ操作量に近づけるように、或いは、現在の車速を理想車速に近づけるように、ブレーキ操作信号を出力してブレーキ操作を行うことが可能となる。そして、自車両6のブレーキ操作量を適切に制御して理想的な減速制御を行うことができる。
【0096】
(3)上記の各実施形態においては、理想車速決定部26は、理想車速パターンデータベース32に記憶されている複数の理想車速パターン情報の中から一つを選択することにより理想車速線Mを決定し、理想ブレーキ操作量決定部27は、理想ブレーキ操作量パターンデータベース33に記憶されている複数の理想ブレーキ踏力パターン情報の中から一つを選択することにより理想ブレーキ踏力線Nを決定し、それらに基づいて理想車速及び理想ブレーキ踏力を決定する場合について説明した。しかし、本発明の適用範囲はこれに限定されない。すなわち、理想車速決定部26が、車速センサ18により検出された現在車速Va、減速目標点決定部24により決定された減速目標点Pt、及び目標車速決定部25により決定された目標車速Vtに基づいて、減速目標点Ptにおいて目標車速Vtとなるための目標減速点Ptまでの間の理想車速を、所定の演算式等に基づいて演算して決定する構成とすることも好適な実施形態の一つである。同様に、理想ブレーキ操作量決定部27が、現在車速Va、減速目標点Pt、及び目標車速Vtに基づいて、減速目標点Ptにおいて目標車速Vtとなるための目標減速点Ptまでの間の理想ブレーキ操作量を、所定の演算式等に基づいて演算して決定する構成とすることも好適な実施形態の一つである。また、理想車速決定部26は、理想車速パターンデータベース32に記憶されている複数の理想車速パターン情報の中から一つを選択することにより理想車速線Mを決定し、理想ブレーキ操作量決定部27が、当該理想車速線Mに基づいて理想ブレーキ操作量を演算して決定する構成とすることも好適な実施形態の一つである。
【0097】
(4)上記の各実施形態においては、撮像装置2及びレーダ4により先行車両7(図2参照)や停止目標地物8(図3参照)を検出し、減速目標点を決定する場合について説明した。しかし、本発明の適用範囲はこれに限定されず、例えば、歩行者、自転車、路肩に停車中の車両、道路上の落下物等、或いは道路形状等を検出し、その検出結果に基づいて車両制御補助を行う構成とすることも、本発明の好適な実施形態の一つである。
【0098】
(5)上記第五の実施形態においては、理想ブレーキ踏力と現在のブレーキ踏力との差、及び理想車速と現在車速との差に基づいて、理想ブレーキ踏力を補正する理想ブレーキ操作量補正部を備える構成について説明した。しかし、理想ブレーキ踏力を補正するための構成は、これに限定されるものではない。例えば、道路状況、道路勾配、天候を撮像装置2等から直接的に検知し、検知された状況に応じて理想ブレーキ操作量を補正する構成とすることも好適な実施形態の一つである。この場合、道路状況等に応じて予め定めた所定の補正係数を用い、この補正係数を、理想ブレーキ踏力線Nの各地点での値に乗算することにより、理想ブレーキ踏力線Nに規定される理想ブレーキ踏力を各地点での値に応じて増減させて補正することができる。また、理想ブレーキ操作量パターンデータベース33に、予め道路状況等に応じて異なる複数の理想ブレーキ踏力パターン情報を記憶しておき、道路状況等に応じて適切な理想ブレーキ踏力パターン情報を選択する構成とすることもできる。
【図面の簡単な説明】
【0099】
【図1】本発明の第一の実施形態に係る車両制御補助装置の構成を示すブロック図
【図2】自車両の進行方向に先行車両が存在する場合の減速目標点及び目標車速の決定方法の説明図
【図3】自車両の進行方向に停止目標地物が存在する場合の減速目標点及び目標車速の決定方法の説明図
【図4】地図データベースに格納されている地図情報の内容を示す説明図
【図5】理想車速線並びに理想ブレーキ踏力線及び理想ブレーキ踏力範囲の一例を示す図
【図6】理想車速パターンデータベースに記憶されている理想車速パターン情報の例を示す図
【図7】理想ブレーキ操作量パターンデータベースに記憶されている理想ブレーキ踏力パターン情報の例を示す図
【図8】本発明の第一の実施形態に係る報知情報の例を示す図
【図9】本発明の第一の実施形態に係る車両制御補助装置の全体の動作処理を示すフローチャート
【図10】図9のステップ#02の処理の詳細を示すフローチャート
【図11】図9のステップ#03の処理の詳細を示すフローチャート
【図12】本発明の第二の実施形態に係る報知情報の例を示す図
【図13】本発明の第三の実施形態に係る報知情報の例を示す図
【図14】本発明の第六の実施形態に係る車両制御補助装置の動作処理を示すフローチャート
【符号の説明】
【0100】
1:車両制御補助装置
6:自車両
7:先行車両
8:停止目標地物
15:先行車両検出手段
16:停止目標地物検出手段
18:車速センサ(車速検出手段)
21:ブレーキセンサ(ブレーキ操作量検出手段)
24:減速目標点決定部(減速目標点決定手段)
25:目標車速決定部(目標車速決定手段)
28:報知情報生成部(報知情報生成手段)
46:理想車速決定手段
47:理想ブレーキ操作量決定手段
48:報知手段
A:報知情報
Va:現在車速
Vb:先行車両の車速
Vt:目標車速
Bf:ブレーキ踏力
Pt:減速目標点
La:現在車間距離
Lb:目標車間距離
M:理想車速線
N:理想ブレーキ踏力線
R:理想ブレーキ踏力範囲
【技術分野】
【0001】
本発明は、理想のブレーキ操作量と現在のブレーキ操作量との関係や理想車速と現在車速との関係を示す報知情報を生成して報知することにより、車両制御を補助する車両制御補助装置及び車両制御補助方法に関する。
【背景技術】
【0002】
車両の減速時に、その減速の程度に応じた表示を運転者に対して行うことにより、運転者による車両制御を補助する技術として、例えば下記の特許文献1には、以下のようなカーナビゲーション装置に関する技術が開示されている。このカーナビゲーション装置は、車両にブレーキが掛けられる都度、その時の減速度を検出すると共に停止するまでの速度変化を検出し、速度変化を制動特性としてパターン化して記憶しておく。そして、車両にブレーキが掛けられた時には、減速開始時の減速度を検出して通常の減速か急ブレーキかを判断し、パターン化された制動特性に当てはめて、急ブレーキであるかどうかを判断し、その判断結果に応じた表示を行う。
【0003】
これにより、車両の減速時に、その速度又は減速度を運転者の通常の制動時の運転特性と比較することにより急ブレーキか否かを判断し、表示するので、表示される画面の内容が運転者の感覚から離れた内容となることを防止できる。
【0004】
【特許文献1】特開2004−101280号公報(第3−7頁、第10図)
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、実際の運転時において、急ブレーキをかける機会は少ない。また、急ブレーキをかけている状態において、運転者が急ブレーキの表示を見る余裕も少ない。
一方、通常のブレーキ操作時には、運転者は、停止又は減速する目標地点を決め、そこまでの距離及び現在車速に基づいて経験的にブレーキ操作量を判断し、ブレーキ操作を行っている。しかし、運転者の経験的な判断のみによるブレーキ操作では、道路の路面状況や道路形状の違い等によって予測したとおりに減速されない場合が起こり得る。このような場合には、運転者は、ブレーキを更に踏み込んだり、緩めたりする操作を行う必要が生じ、車両の挙動が乱れ、他の乗員に不快感を与えたり、車両に対して無用な負荷を与えたりすることになりかねない。
【0006】
本発明は、上記の課題に鑑みてなされたものであり、その目的は、運転者が理想のブレーキ操作量に対する現在のブレーキ操作量の過不足を適切に判断することができ、それによって容易に適切なブレーキ操作を行えるようにするための車両制御補助装置及び車両制御補助方法を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するための本発明に係る車両制御補助装置の特徴構成は、自車両の現在車速を検出する車速検出手段と、自車両のブレーキ操作量を検出するブレーキ操作量検出手段と、自車両の減速制御の目標点である減速目標点を決定する減速目標点決定手段と、前記減速目標点における目標車速を決定する目標車速決定手段と、前記現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想ブレーキ操作量を決定する理想ブレーキ操作量決定手段と、前記理想ブレーキ操作量と現在のブレーキ操作量との関係を示す報知情報を生成する報知情報生成手段と、前記報知情報生成手段により生成された前記報知情報を報知する報知手段と、を備える点にある。
【0008】
この特徴構成によれば、自車両の運転者は、理想ブレーキ操作量に対して現在のブレーキ操作量がどのような関係にあるかを知ることができるので、理想のブレーキ操作量に対する現在のブレーキ操作量の過不足を適切に判断することができる。したがって、現在のブレーキ操作量を理想ブレーキ操作量に近づけるように操作することができ、容易に適切なブレーキ操作を行うことが可能となる。
【0009】
ここで、前記報知情報は、前記理想ブレーキ操作量と現在のブレーキ操作量との差を前記報知手段により運転者に報知するための情報とすると好適である。またこの際、前記理想ブレーキ操作量と現在のブレーキ操作量との差には、その差の絶対値に加えてその差の方向を含むと好適である。
【0010】
これにより、自車両の運転者は、理想ブレーキ操作量に対する現在のブレーキ操作量の差を知ることができるので、現在のブレーキ操作量を理想ブレーキ操作量に近づける操作を比較的容易に行うことが可能となる。
【0011】
また、前記理想ブレーキ操作量決定手段は、前記減速目標点までの距離との関係でブレーキ操作量を規定する複数の理想ブレーキ操作量パターン情報を有し、前記現在車速、前記目標車速、及び自車両の現在位置から前記減速目標点までの距離に基づいて、一つの理想ブレーキ操作量パターン情報を選択し、当該選択された理想ブレーキ操作量パターン情報に従って前記理想ブレーキ操作量を決定する構成とすると好適である。
【0012】
これにより、複雑な演算等をすることなく、現在車速、目標車速、及び自車両の現在位置から前記減速目標点までの距離の条件に従って理想ブレーキ操作量を決定することができる。
【0013】
また、前記現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想車速を決定する理想車速決定手段を更に備え、前記報知情報生成手段は、前記理想車速と前記現在車速との関係、及び前記理想ブレーキ操作量と現在のブレーキ操作量との関係を示す報知情報を生成する構成とすると好適である。
【0014】
これにより、自車両の運転者は、理想車速と現在車速との関係、及び理想ブレーキ操作量と現在のブレーキ操作量との関係の双方を知ることができるので、現在のブレーキ操作量及びそれに伴う自車両の車速の双方についての理想の状態に対する過不足を適切に判断することができる。したがって、現在のブレーキ操作量及び車速を理想の状態に近づけるように操作することができ、より適切なブレーキ操作を行うことが可能となる。
【0015】
あるいは、前記現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想車速を決定する理想車速決定手段を更に備え、前記報知情報生成手段は、前記理想車速と前記現在車速との関係、及び前記理想車速と現在のブレーキ操作量に基づく将来の予想車速との関係を示す報知情報を生成する構成としても好適である。
【0016】
これにより、自車両の運転者は、理想車速と現在車速との関係、及び理想車速と現在のブレーキ操作量に基づく将来の予想車速との関係の双方を知ることができるので、現在のブレーキ操作量によって自車両の車速が将来どのように変化するかを知ることができる。したがって、自車両の車速を理想車速に近づけるように、適切にブレーキ操作を行うことが可能となる。
【0017】
また、前記報知情報は、現在のブレーキ操作量で減速した場合に前記目標車速となる将来の予想減速点の位置を示す情報を更に含む構成とすると好適である。
【0018】
これにより、自車両の運転者は、現在のブレーキ操作量で減速した場合に目標車速となる位置が減速目標点に対してどこになるかを知ることができるので、自車両が目標車速となる位置が減速目標点となるようにブレーキ操作量を調節することができ、適切なブレーキ操作を行うことが可能となる。
【0019】
また、前記理想ブレーキ操作量と現在のブレーキ操作量との差、及び前記理想車速と前記現在車速との差に基づいて、前記理想ブレーキ操作量を補正する理想ブレーキ操作量補正手段を更に備える構成とすると好適である。
【0020】
これにより、ブレーキ操作量に対する車速の変化の程度が、道路状況、道路勾配、天候等に応じて変化した場合においても、そのずれを補正して適切な理想ブレーキ操作量に基づく報知情報を報知することが可能となる。
【0021】
本発明に係る車両制御補助装置のもう一つの特徴構成は、自車両の現在車速を検出する車速検出手段と、自車両のブレーキ操作量を検出するブレーキ操作量検出手段と、自車両の減速制御の目標点である減速目標点を決定する減速目標点決定手段と、前記減速目標点における目標車速を決定する目標車速決定手段と、前記現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想車速を決定する理想車速決定手段と、前記理想車速と前記現在車速との関係を示す報知情報を生成する報知情報生成手段と、前記報知情報生成手段により生成された前記報知情報を報知する報知手段と、を備える点にある。
【0022】
この特徴構成によれば、自車両の運転者は、理想車速に対して現在の車速がどのような関係にあるかを知ることができるので、自車両の現在車速の理想状態に対する過不足を適切に判断することができる。したがって、現在の車速を理想の状態に近づけるように運転者が車両制御を行うことにより、より適切な車両制御を行うことが可能となる。
【0023】
ここで、前記理想車速決定手段は、前記減速目標点までの距離との関係で車速を規定する複数の理想車速パターン情報を有し、前記現在車速、前記目標車速、及び自車両の現在位置から前記減速目標点までの距離に基づいて、一つの理想車速パターン情報を選択し、当該選択された理想車速パターン情報に従って前記理想車速を決定する構成とすると好適である。
【0024】
これにより、複雑な演算等をすることなく、現在車速、目標車速、及び自車両の現在位置から前記減速目標点までの距離の条件に従って理想車速を決定することができる。
【0025】
また、前記報知手段は、前記報知情報を画像、音声、及び振動のいずれか一つ以上により報知する構成とすることができる。
【0026】
また、自車両の進行方向に存在する先行車両を検出する先行車両検出手段を更に備え、前記減速目標点決定手段は、先行車両に対して所定の車間距離を確保できる点を減速目標点として決定し、前記目標車速決定手段は、前記先行車両の車速を目標車速として決定する構成とすると好適である。
【0027】
これにより、自車両の進行方向に先行車両が存在する場合には、先行車両に対して適切な車間距離を保ちつつ追従する走行制御を適切に行うことが可能となる。
【0028】
また、停止目標地物を検出する停止目標地物検出手段を更に備え、前記減速目標点決定手段は、前記先行車両検出手段により前記先行車両が検出されない場合には、前記停止目標地物に応じた車両停止位置を減速目標点として決定し、前記目標車速決定手段は、目標車速をゼロに決定する構成とすると好適である。
【0029】
これにより、自車両の進行方向に先行車両が存在しない場合には、例えば停止線、信号機、一時停止標識、横断歩道等の停止目標地物に対して適切な位置に自車両を停止させる走行制御を適切に行うことが可能となる。
【0030】
本発明に係る車両制御補助装置の更に別の特徴構成は、自車両の減速時に、その減速制御の目標点である減速目標点に到達するまでの間の理想的なブレーキ操作量の範囲である理想ブレーキ操作量範囲に対する現在のブレーキ操作量の関係を示す報知情報を生成する報知情報生成手段と、前記報知情報生成手段により生成された前記報知情報を報知する報知手段と、を備える点にある。
【0031】
この特徴構成によれば、自車両の運転者は、減速時に、理想ブレーキ操作量範囲に対して現在のブレーキ操作量がどのような関係にあるかを知ることができるので、理想のブレーキ操作量範囲に対する現在のブレーキ操作量の過不足を適切に判断することができる。したがって、現在のブレーキ操作量を理想ブレーキ操作量範囲内とするように操作することができ、容易に適切なブレーキ操作を行うことが可能となる。
【0032】
また、前記報知情報に基づいてブレーキ量及び車速の一方又は双方を自動制御する自動制御手段を更に備え、前記報知手段による前記報知情報の報知中に、前記報知情報の内容を含む自車両の状態が所定の条件を満たすときに、前記自動制御手段による自動制御を実行する構成としても好適である。
【0033】
これにより、報知手段による報知情報の報知を行ったにも関わらず運転者による適切なブレーキ操作等が行われない場合に、自動制御手段による制御によって適切な車両制御を行うことが可能となる。また、適切な車両制御が行われている場合には、自動制御手段による自動制御を実行しないことが可能であるので、運転者の好みに合った車両制御が行われるようにすることができる。
【0034】
本発明に係る車両制御補助方法の特徴構成は、自車両の減速制御の目標点である減速目標点を決定する減速目標点決定ステップと、前記減速目標点における目標車速を決定する目標車速決定ステップと、自車両の現在車速を検出し、該現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想ブレーキ操作量を決定する理想ブレーキ操作量決定ステップと、自車両の現在のブレーキ操作量を検出し、前記理想ブレーキ操作量と前記現在のブレーキ操作量との関係を示す報知情報を生成する報知情報生成ステップと、前記報知情報生成ステップにより生成された前記報知情報を報知する報知ステップと、を備える点にある。
【0035】
この特徴構成によれば、自車両の運転者は、理想ブレーキ操作量に対して現在のブレーキ操作量がどのような関係にあるかを知ることができるので、理想のブレーキ操作量に対する現在のブレーキ操作量の過不足を適切に判断することができる。したがって、現在のブレーキ操作量を理想ブレーキ操作量に近づけるように操作することができ、容易に適切なブレーキ操作を行うことが可能となる。
【0036】
本発明に係る車両制御補助方法のもう一つの特徴構成は、自車両の減速制御の目標点である減速目標点を決定する減速目標点決定ステップと、前記減速目標点における目標車速を決定する目標車速決定ステップと、自車両の現在車速を検出し、該現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想車速を決定する理想車速決定ステップと、前記理想車速と前記現在車速との関係を示す報知情報を生成する報知情報生成ステップと、前記報知情報生成ステップにより生成された前記報知情報を報知する報知ステップと、を備える点にある。
【0037】
この特徴構成によれば、自車両の運転者は、理想車速に対して現在の車速がどのような関係にあるかを知ることができるので、自車両の現在車速の理想状態に対する過不足を適切に判断することができる。したがって、現在の車速を理想の状態に近づけるように運転者が車両制御を行うことにより、より適切な車両制御を行うことが可能となる。
【発明を実施するための最良の形態】
【0038】
以下に、本発明の第一の実施形態について図面に基づいて説明する。
図1は、本実施形態に係る車両制御補助装置1の構成を示すブロック図である。本実施形態に係る車両制御補助装置1は、減速制御の際に理想のブレーキ操作量と現在のブレーキ操作量との関係や理想車速と現在車速との関係を示す報知情報を生成して運転者に対して報知することにより、車両制御を補助する装置となっている。以下に、この図1に従って、本実施形態に係る車両制御補助装置1の各部の構成について説明する。なお、この車両制御補助装置1の各機能部は、CPU等の演算処理装置を中核部材として、入力されたデータに対して種々の処理を行うための機能部がハードウエア又はソフトウエア(プログラム)或いはその両方で実装されて構成されている。
【0039】
撮像装置2は、自車両6の周囲を撮像可能に配置され、自車両6の進行方向に存在する先行車両7(図2参照)や停止目標地物8(図3参照)等を含む周囲の状況を撮像する。この撮像装置2としては、例えばCCDセンサやCMOSセンサ等の撮像素子と、この撮像素子に光を導くための光学系を構成するレンズ等を有した構成のものを用いることができる。ここで、停止目標地物8としては、例えば、交差点等に設けられた停止線、信号機、一時停止標識、横断歩道等が該当する。撮像装置2からの出力信号は画像情報処理部3に入力される。画像情報処理部3は、撮像装置2からの出力信号を画像処理し、自車両6の進行方向に存在する先行車両7又は停止目標地物8の有無、及び自車両6から先行車両7までの距離(現在車間距離La)又は停止目標地物8までの距離等についての画像認識を行う。そして、画像情報処理部3は、その画像認識結果の情報を演算処理部17へ出力する。
本実施形態においては、これらの撮像装置2及び画像情報処理部3は、本発明における「先行車両検出手段15」及び「停止目標地物検出手段16」を構成する。
【0040】
レーダ4は、自車両6の進行方向に存在する先行車両7(図2参照)を検出するとともに、この先行車両7との間の距離、すなわち現在車間距離Laを検出するために設けられている。このようなレーダ4としては、例えば、レーザレーダ、ミリ波レーダ、赤外線レーダ等を用いることができる。レーダ4からの出力信号はレーダ情報処理部5に入力される。レーダ情報処理部5は、レーダ4からの出力信号を処理して、先行車両7の有無、及び先行車両7との間の車間距離Laを検出し、その情報を演算処理部17へ出力する。
本実施形態においては、これらのレーダ4及びレーダ情報処理部5は、本発明における「先行車両検出手段15」を構成する。
【0041】
ロケーション部9は、GPS受信機10、方位センサ11、及び距離センサ12からの情報を取得する。ここで、GPS受信機10は、図示しないGPS衛星からの信号を受信する装置であり、受信した信号に基づいてGPS受信機10の位置(緯度及び経度)や日時等の各種情報を取得する。方位センサ11は、地磁気センサやジャイロセンサ、或いは、ハンドルの回転部に取り付けた光学的な回転センサや回転型の抵抗ボリューム、車輪部に取り付ける角度センサ等により構成され、自車両6の方位を検知する。距離センサ12は、車輪の回転数を検知する車速センサや自車両6の加速度を検知するヨー・Gセンサと、検知された加速度を2回積分する回路との組み合わせ等により構成され、自車両の移動距離を検知する。そして、ロケーション部9は、これらのGPS受信機10、方位センサ11及び距離センサ12から取得した情報に基づいて、公知の方法により自車両6の位置及び方位を特定する演算を行う。
【0042】
また、ロケーション部9は、上記のようにして特定された自車両6の位置及び方位に基づいて、地図データベース13から地図情報を取得する。そして、ロケーション部9は、取得された地図情報に基づいて、公知の手法によるマップマッチングを行い、自車両6の位置が地図情報に含まれる道路上に位置し、自車両6の方位が当該道路に沿った方向となるように修正を行う。このようにしてロケーション部9により特定された自車両6の位置及び方位は、自車位置情報及び自車方位情報として演算処理部17に出力される。
【0043】
地図データベース13には地図情報が格納されている。図4は、地図データベース13に格納されている地図情報の内容を示す説明図である。この図に示すように、ここでは、地図情報として、道路ネットワークレイヤX1、道路情報レイヤX2、背景レイヤX3が格納されている。この地図データベース13は、例えば、ハードディスクドライブ、DVD−ROMを備えたDVDドライブ、CD−ROMを備えたCDドライブ等のように、情報を記憶可能な記録媒体とその駆動手段とを有する装置をハードウエア構成として備えている。
【0044】
道路ネットワークレイヤX1は、道路間の接続情報を示すレイヤである。具体的には、緯度及び経度で表現された地図上の位置情報を有する多数のノードNの情報と、2つのノードNを連結して道路を構成する多数のリンクKの情報とを有して構成されている。また、各リンクKは、そのリンク情報として、道路の種別(高速道路、有料道路、国道、県道等の種別)やリンク長さ等の情報を有している。
道路情報レイヤX2は、道路ネットワークレイヤX1に関連付けられて格納され、道路の詳細な情報を示すレイヤである。具体的には、道路ネットワークレイヤX1に関連付けられた各ノードNの情報、及び2つのノードNの間(リンクK上)に配置されて緯度及び経度で表現された地図上の位置情報を有する多数の形状補完点Sの情報を有して構成されている。
背景レイヤX3は、道路ネットワークレイヤX1及び道路情報レイヤX2に関連付けられて格納され、道路及びその周辺に設けられた各種地物や地図表示のための背景等の情報を示すレイヤである。具体的には、この背景レイヤX3に格納される情報には、例えば、交差点等に設けられた停止線、信号機、一時停止標識、横断歩道等の停止目標地物8となり得る地物8cの位置情報が含まれている。また、背景レイヤX3には、この他にも、道路標識、ペイント表示、建築物等の各種地物の位置や形状、道路形状等の各種情報が格納されている。
【0045】
また、ロケーション部9は、地図データベース13から停止目標地物8の位置情報を抽出するための停止目標地物位置抽出部14を備えている。この停止目標地物位置抽出部14は、自車両6の進行方向に存在する停止目標地物8の位置情報を抽出して取得する処理を行う。具体的には、停止目標地物位置抽出部14は、ロケーション部9において特定された自車位置情報及び自車方位情報に基づいて、地図データベース13に格納されている停止目標地物8となり得る地物8cの中から、自車両6の進行方向の所定距離内に存在する1又は2以上の地物8cを抽出し、それを停止目標地物8としてその種別情報(停止線、信号機、又は一時停止標識等)及び位置情報を取得する処理を行う。この際の地物8cを抽出する所定距離としては、例えば100m等に設定することができる。この停止目標地物位置抽出部14により取得された情報は、演算処理部17へ出力される。例えば、自車両6が図3に示す位置にある状況では、停止目標地物8としては、自車両6の進行方向に存在する停止線及び2機の信号機が抽出される。
本実施形態においては、この停止目標地物位置抽出部14及び地図データベース13は、本発明における「停止目標地物検出手段16」を構成する。
【0046】
車速センサ18は、自車両6の現在車速Vaを検出するセンサである。この車速センサ18としては、例えば、自車両6の変速機の出力軸やドライブシャフト等の回転数を検出する回転数検出センサ等が用いられる。そして、この車速センサ18は、その検出結果としての現在車速Vaの情報を演算処理部17へ出力する。
本実施形態においては、この車速センサ18が、本発明における「車速検出手段」を構成する。
【0047】
アクセルセンサ19は、アクセルペダル20の踏み込み量を検出することによりアクセル開度Afを検出するセンサである。ブレーキセンサ21は、ブレーキペダル22の踏力であるブレーキ踏力Bfを検出するセンサである。本実施形態においては、このブレーキセンサ21により検出されるブレーキ踏力Bfが、本発明における「ブレーキ操作量」に相当し、このブレーキセンサ21が本発明における「ブレーキ操作量検出手段」を構成する。そして、これらのアクセルセンサ19及びブレーキセンサ21は、その検出結果としてのアクセル開度Af及びブレーキ踏力Bfの情報を演算処理部17へ出力する。
【0048】
演算処理部17は、ナビゲーション用演算処理部23、減速目標点決定部24、目標車速決定部25、理想車速決定部26、理想ブレーキ操作量決定部27、及び報知情報生成部28を備えている。また、演算処理部17は、運転者に各種情報等を報知するための液晶表示ディスプレイ等の表示装置30や、スピーカ及びアンプ等の音声出力装置31等の報知装置に接続されている。更に、演算処理部17は、理想車速パターン情報を記憶している理想車速パターンデータベース32、及び理想ブレーキ操作量パターン情報を記憶している理想ブレーキ操作量パターンデータベース33にも接続されている。
【0049】
ナビゲーション用演算処理部23は、誘導経路の探索、自車位置表示、地図表示、経路案内等のナビゲーション装置としての処理を行う。すなわち、ナビゲーション用演算処理部23は、ロケーション部9から自車位置情報及び自車方位情報を取得するとともに、この自車位置情報及び自車方位情報に基づいてロケーション部9を介して地図データベース13から地図情報を取得する。そして、ナビゲーション用演算処理部23は、これらの自車位置情報、自車方位情報、及び地図情報を用いて、地図上に自車マークを重ねて表示する自車位置表示、地図表示、自車位置と目的地とを結ぶ誘導経路の探索、探索された誘導経路に従った経路案内等を行うための演算処理を行う。ここでは、ナビゲーション用演算処理部23は、表示装置30及び音声出力装置31を用いて演算結果の表示や音声出力等を行う構成となっている。また、目的地の設定や検索等の入力操作は、表示装置30と一体的に設けられたタッチパネルや図示しないリモートコントローラ等により行われる。
【0050】
減速目標点決定部24は、自車両6の減速制御の目標点である減速目標点Ptを決定する処理を行う。本実施形態においては、減速目標点決定部24は、自車両6の進行方向に先行車両7が検出された場合には当該先行車両7を基準とし、先行車両7が検出されない場合であって停止目標地物8が検出された場合には当該停止目標地物8を基準として、減速目標点Ptを決定する。
また、目標車速決定部25は、減速目標点Ptにおける目標車速Vtを決定する処理を行う。本実施形態においては、目標車速決定部25は、自車両6の進行方向に先行車両7が検出された場合には当該先行車両7の車速Vbを目標車速Vtとし(Vt=Vb)、先行車両7が検出されない場合であって停止目標地物8が検出された場合には目標車速をゼロとする(Vt=0)。
【0051】
例えば、自車両6が図2に示すような状況にある場合、画像情報処理部3及びレーダ情報処理部5における処理の結果、自車両6の進行方向に存在する先行車両7が検出される。この場合、減速目標点決定部24は、先行車両7に対して所定の目標車間距離Lbを確保できる点を減速目標点Ptとして決定する。また、目標車速決定部25は、先行車両7の車速Vbを目標車速Vtとする(Vt=Vb)。ここで、目標車間距離Lbは、目標車速Vtに応じて定まる適正な車間距離として規定される。この目標車間距離Lbは、例えば、目標車速Vtに応じて予め定めたテーブル又はマップに従って決定し、或いは予め定めた目標車速Vtとの関係式を用いて演算して決定することができる。そして、減速目標点Ptは、先行車両7が走行中である場合には、図2(a)及び(b)に示すように、自車両6の速度が現在車速Vaから目標車速Vt(=Vb)まで減速する間に先行車両7も進行するので、それを考慮して定まる点となる。すなわち、自車両6の現在位置から減速目標点Ptまでの減速距離Ltは、現在車間距離Laと目標車間距離Lbとの差の距離に、自車両6と先行車両7との車間距離が現在車間距離Laから目標車間距離Lbに縮まり、かつ自車両6の車速が目標車速Vtに減速するまでの間に先行車両7が進む距離を加えた距離となる。具体的には、減速目標点Ptまでの減速距離Ltは、以下の式(1)により算出される。
Lt=(La−Lb)(Va+Vb)/(Va−Vb)・・・(1)
そして、減速目標点Ptは、自車両6の現在位置から進行方向に減速距離Ltだけ進んだ地点に決定される。
【0052】
なお、先行車両7の車速Vbは、画像情報処理部3及びレーダ情報処理部5における処理の結果に基づいて算出することができる。すなわち、画像情報処理部3及びレーダ情報処理部5における処理の結果として得られる車間距離Laの時間に従った変化量から自車両6と先行車両7との相対速度を算出することができる。そして、この相対速度と自車両6の現在車速Vaとから先行車両7の車速Vbを算出することができる。
また、先行車両7が停止中である場合(Vb=0)には、目標車速Vtもゼロとなり(Vt=0)、減速目標点Ptまでの減速距離Ltは、現在車間距離Laと目標車間距離Lbとの差の距離となる。この際の目標車間距離Lbは、ここでは特に停止車間距離と呼ぶこととする。この停止車間距離は、通常は、目標車速Vtに応じて定まる目標車間距離Lbの中で最も小さい値となる。
【0053】
一方、例えば、自車両6が図3に示す状況にある場合、自車両6の進行方向に存在する先行車両7が検出されず、画像情報処理部3による画像認識処理の結果及びロケーション部9の停止目標地物位置抽出部14による停止目標地物8の抽出結果に基づいて、停止目標地物8としての停止線及び信号機が検出される。この場合、減速目標点決定部24は、停止目標地物8に応じた車両停止位置を減速目標点Ptとして決定する。また、目標車速決定部25は、目標車速Vtをゼロとする(Vt=0)。ここで、停止目標地物8に応じた車両停止位置は、停止目標地物8に応じて自車両6が停止すべき位置であり、地図データベース13に、停止目標地物8となり得る各地物8cに関する情報として予め格納されている。図3に示す例では、停止目標地物8として抽出された自車両6の進行方向に存在する停止線及び2機の信号機の全てについて、それらに応じた車両停止位置は、自車両6の前端が停止線のやや手前になるときの自車両6の位置となっている。またこの場合、減速目標点Ptまでの減速距離Ltは、ロケーション部9により特定された自車位置情報に示される自車両6の現在位置から停止目標地物8に応じた車両停止位置までの距離となる。なお、停止目標地物位置抽出部14により抽出された停止目標地物8に応じた車両停止位置が複数存在する場合には、自車両6の現在位置に最も近い車両停止位置を減速目標点Ptとして決定する。
【0054】
したがって、本実施形態においては、この減速目標点決定部24が本発明における「減速目標点決定手段」を構成し、目標車速決定部25が本発明における「目標車速決定手段」を構成する。
【0055】
理想車速決定部26は、車速センサ18により検出された現在車速Va、減速目標点決定部24により決定された減速目標点Pt、及び目標車速決定部25により決定された目標車速Vtに基づいて、減速目標点Ptにおいて目標車速Vtとなるための目標減速点Ptまでの間の理想車速を決定する処理を行う。本実施形態においては、理想車速決定部26は、アクセルセンサ19によりアクセルオフが検出されたときに自車両6の減速が開始されたものと判断し、そのときの自車位置を減速制御の開始地点Po(図2及び図3参照)として、減速目標点Ptまでの間の理想車速を規定する理想車速線Mを決定する。図5(a)は、このように決定された理想車速線Mの一例であり、開始地点Poでの現在車速VaがVao、目標車速Vtがゼロ(Vt=0)である場合に、開始地点Poから減速目標点Ptまでの減速距離Lt間で減速するための理想車速線Mを示している。この理想車速線Mに規定されている車速が、減速目標点Ptまでの間の各地点での理想車速となる。
【0056】
本実施形態においては、理想車速決定部26は、理想車速パターンデータベース32に記憶されている複数の理想車速パターン情報の中から、一つの理想車速パターン情報を選択することにより理想車速線Mを決定する。図6は、理想車速パターンデータベース32に記憶されている理想車速パターン情報の例を示す図である。この図に示すように、理想車速パターンデータベース32には、開始地点Poから減速目標点Ptまでの減速距離Ltとの関係で車速を規定するものであって、開始地点Poでの現在車速Vao、目標車速Vt、及び減速距離Ltの条件がそれぞれ異なる複数の理想車速パターン情報が記憶されている。図6(a)は、目標車速Vtがゼロ(Vt=0)であって減速距離Ltが比較的十分にある場合における開始地点Poでの現在車速Vaoが3通りに異なる場合の理想車速パターン情報の例、図6(b)は、(a)に対して減速距離Ltが比較的少ない場合、図6(c)は、(a)に対して目標車速VtがゼロでなくVt1である場合(Vt=Vt1)の理想車速パターン情報の例をそれぞれ示している。なお、これらの図6(a)〜(c)に示す例は理想車速パターンデータベース32に記憶されている複数の理想車速パターン情報の中の一部の例であり、実際には、自車両6の走行状態として取り得るほぼ全ての状態を網羅できるだけの理想車速パターン情報を記憶しておくことが望ましい。
【0057】
理想車速決定部26は、これら複数の理想車速パターン情報の中から、現状の開始地点Poでの現在車速Vao、目標車速Vt、及び減速距離Ltに一致する理想車速パターン情報を選択し、当該選択された理想車速パターン情報を理想車速線Mとして決定する。この際、現状の開始地点Poでの現在車速Vao、目標車速Vt、及び減速距離Ltに一致する理想車速パターン情報が存在しない場合には、最も近い理想車速パターン情報を選択する。
本実施形態においては、この理想車速決定部26及び理想車速パターンデータベース32が、本発明における「理想車速決定手段46」を構成する。
【0058】
理想ブレーキ操作量決定部27は、車速センサ18により検出された現在車速Va、減速目標点決定部24により決定された減速目標点Pt、及び目標車速決定部25により決定された目標車速Vtに基づいて、減速目標点Ptにおいて目標車速Vtとなるための目標減速点Ptまでの間の理想ブレーキ操作量を決定する処理を行う。本実施形態においては、理想ブレーキ操作量決定部27は、アクセルセンサ19によりアクセルオフが検出されたときに自車両6の減速が開始されたものと判断し、そのときの自車位置を開始地点Po(図2及び図3参照)として、減速目標点Ptまでの間の理想ブレーキ操作量としての理想ブレーキ踏力を規定する理想ブレーキ踏力線Nを決定する。またここでは、理想ブレーキ踏力線Nに対応する理想ブレーキ踏力範囲Rも同時に決定する。図5(b)は、このように決定された理想ブレーキ踏力線N及び理想ブレーキ踏力範囲Rの一例であり、開始地点Poでの現在車速VaがVao、目標車速Vtがゼロ(Vt=0)である場合に、開始地点Poから減速目標点Ptまでの減速距離Lt間で減速するための理想ブレーキ踏力線N及び理想ブレーキ踏力範囲Rを示している。この理想ブレーキ踏力線Nに対応する理想ブレーキ踏力範囲R内のブレーキ踏力が、減速目標点Ptまでの間の各地点での理想ブレーキ踏力の範囲となる。
【0059】
本実施形態においては、理想ブレーキ操作量決定部27は、理想ブレーキ操作量パターンデータベース33に記憶されている複数の理想ブレーキ踏力パターン情報の中から、一つの理想ブレーキ踏力パターン情報を選択することにより理想ブレーキ踏力線Nを決定する。図7は、理想ブレーキ操作量パターンデータベース33に記憶されている理想ブレーキ踏力パターン情報の例を示す図である。この図に示すように、理想ブレーキ操作量パターンデータベース33には、開始地点Poから減速目標点Ptまでの減速距離Ltとの関係でブレーキ踏力を規定するものであって、開始地点Poでの現在車速Vao、目標車速Vt、及び減速距離Ltの条件がそれぞれ異なる複数の理想ブレーキ踏力パターン情報が記憶されている。この際の各理想ブレーキ踏力パターン情報についての条件は上述した複数の理想車速パターン情報の条件に揃えられている。そして、各理想ブレーキ踏力パターン情報は、理想車速パターンデータベース32に記憶されている複数の理想車速パターン情報と一対一に関連付けられて記憶されている。
【0060】
図7(a)〜(c)に示されている複数の理想ブレーキ踏力パターン情報のそれぞれは、図6(a)〜(c)に示されている各理想車速パターン情報に対応している。そして、理想ブレーキ踏力パターン情報は、同じ減速距離Ltであっても開始地点Poでの現在車速Vaoが高いほど、すなわち対応する理想車速パターン情報の傾斜が急であるほど、高いブレーキ踏力となるように規定されている。また、図7(a)及び(b)に示されている理想ブレーキ踏力パターン情報の条件では目標車速Vtがゼロ(Vt=0)であるので、理想ブレーキ踏力パターン情報は、減速距離Ltの終点(減速目標点Pt)付近で一旦ブレーキ踏力が低くなった後に再度ブレーキ踏力が高くなっており、自車両6を停止状態に維持するようになっている。これに対して図7(c)に示されている理想ブレーキ踏力パターン情報の条件では目標車速Vtがゼロでなく、自車両6は減速した後も走行状態を継続するので、減速距離Ltの終点(減速目標点Pt)でブレーキ踏力はゼロとなっている。これらの図7(a)〜(c)に示す例も、理想ブレーキ操作量パターンデータベース33に記憶されている複数の理想ブレーキ踏力パターン情報の中の一部の例であり、実際には、自車両6の走行状態として取り得るほぼ全ての状態を網羅できるだけの理想ブレーキ踏力パターン情報を記憶しておくことが望ましい。
【0061】
また、理想ブレーキ操作量パターンデータベース33には、複数の理想ブレーキ踏力パターン情報のそれぞれについて理想ブレーキ踏力範囲情報が関連付けられて記憶されている。図7では、煩雑になることを避けるために、図7(a)の一つの理想ブレーキ踏力パターン情報についての理想ブレーキ踏力範囲情報のみを図示しているが、実際には、複数の理想ブレーキ踏力パターン情報の全てについて同様に、理想ブレーキ踏力範囲の情報が関連付けられて記憶されている。
【0062】
理想ブレーキ操作量決定部27は、これら複数の理想ブレーキ踏力パターン情報の中から、理想車速決定部26により選択された理想車速パターン情報に関連付けられた理想ブレーキ踏力パターン情報を選択し、当該選択された理想ブレーキ踏力パターン情報を理想ブレーキ踏力線Nとして決定する。これにより、理想ブレーキ操作量決定部27は、開始地点Poでの現在車速Vao、目標車速Vt、及び減速距離Ltに基づく一つの理想ブレーキ踏力パターン情報を選択することになる。また、理想ブレーキ操作量決定部27は、選択された理想ブレーキ踏力パターン情報に関連付けられて記憶されている理想ブレーキ踏力範囲情報を理想ブレーキ踏力範囲Rとして決定する。
本実施形態においては、理想ブレーキ踏力パターン情報及び理想ブレーキ踏力範囲情報が本発明における「理想ブレーキ操作量パターン情報」に相当し、理想ブレーキ操作量決定部27及び理想ブレーキ操作量パターンデータベース33が本発明における「理想ブレーキ操作量決定手段47」を構成する。
【0063】
報知情報生成部28は、理想車速線Mにより規定される理想車速と車速センサ18により検出される現在車速Vaとの関係、並びに理想ブレーキ踏力線N及び理想ブレーキ踏力範囲Rにより規定される理想ブレーキ踏力とブレーキセンサ21により検出される現在のブレーキ踏力Bfとの関係を示す報知情報Aを生成する処理を行う。図8は、本実施形態に係る報知情報Aの例を示す図である。この図に示すように、ここでは、報知情報Aは、表示装置30に表示するための画像情報であり、理想車速と現在車速Vaとの差、及び理想ブレーキ踏力範囲Rと現在のブレーキ踏力Bfとの差を表示し、自車両6の運転者に報知する情報となっている。また、図8に示す報知情報Aは、図5に示す理想車速線M並びに理想ブレーキ踏力線N及び理想ブレーキ踏力範囲Rが決定された場合、すなわち減速目標点Ptでの目標車速Vtがゼロ(Vt=0)である場合の例を示している。
【0064】
図8に示す報知情報Aは、理想車速線Mと現在車速Vaとを対比可能に表示する車速表示情報A1と、理想ブレーキ踏力範囲Rと現在のブレーキ踏力Bfとを対比可能に表示するブレーキ踏力表示情報A2とを有して構成されている。具体的には、車速表示情報A1は、横軸を距離、縦軸を車速とするグラフ上に理想車速線Mを表示している。また、横軸に沿って減速目標点Ptを表す目標位置表示35及び自車位置を表す自車位置表示36を配置している。更に、縦軸に沿って現在車速Vaを表す現在車速表示37を配置している。そして、自車位置と現在車速Vaとの交点38により自車両6の現在位置及び現在車速Vaを理想車速線Mと対比可能に表示している。一方、ブレーキ踏力表示情報A2は、ブレーキ踏力の最大値(MAX)から最小値(0)までのブレーキ踏力領域を表す長方形状の踏力領域表示39を有している。また、この踏力領域表示39上に、理想ブレーキ操作量決定部27において決定された理想ブレーキ踏力範囲Rを表す理想踏力範囲表示40と、現在のブレーキ踏力Bfを表す現在踏力表示41とを対比可能に表示している。更に、理想踏力範囲表示40の上又は下にブレーキ踏力Bfの変化方向を表示する変化方向表示42を配置している。
本実施形態においては、報知情報生成部28が本発明における「報知情報生成手段」を構成する。
【0065】
報知情報生成部28により生成された報知情報Aは、表示装置30に表示される。これにより、報知情報Aは自車両6の運転者に対して報知される。したがって、本実施形態においては、表示装置30が本発明における「報知手段48」を構成する。
【0066】
次に、本実施形態に係る車両制御補助装置1による車両制御補助方法について説明する。図9は、本実施形態に係る車両制御補助装置1の全体の動作処理を示すフローチャートである。図10は、図9のステップ#02の減速目標点Pt及び目標車速Vtを決定する処理の詳細を示すフローチャートである。図11は、図10のステップ#03の減速目標点Ptまでの理想車速及び理想ブレーキ踏力を決定する処理の詳細を示すフローチャートである。以下、これらのフローチャートに従って説明する。
【0067】
図9に示すように、本実施形態に係る車両制御補助装置1は、まず、アクセルセンサ19により検出されるアクセル開度Afに基づいて、アクセルオフの操作がなされたか否かについて判断する(ステップ#01)。アクセルオフの操作がなされない状態では(ステップ#01:NO)、自車両6は減速しないと判断できるので、以降の処理には進まない。そして、アクセルオフの操作がなされた場合には(ステップ#01:YES)、自車両6が減速すると判断できるので、次に、減速目標点決定部24及び目標車速決定部25において、減速目標点Pt及び目標車速Vtを決定する処理を行う(ステップ#02)。このステップ#02の処理については、図10のフローチャートに基づいて後に詳細に説明する。次に、車両制御補助装置1は、理想車速決定部26及び理想ブレーキ操作量決定部27において、車速センサ18により検出された現在車速Va、並びにステップ#02で決定された減速目標点Pt及び目標車速Vtに基づいて、減速目標点Ptにおいて目標車速Vtとなるための目標減速点Ptまでの間の理想車速及び理想ブレーキ操作量を決定する処理を行う(ステップ#03)。このステップ#03の処理については、図11のフローチャートに基づいて後に詳細に説明する。
【0068】
次に、車両制御補助装置1は、車速センサ18からの現在車速Vaの情報、ロケーション部9からの自車位置情報に基づく現在位置の情報、及びブレーキセンサ21からのブレーキ踏力Bfの情報を取得する(ステップ#04)。そして、報知情報生成部28において報知情報Aを生成し(ステップ#05)、生成された報知情報Aを表示装置30に表示することにより報知する(ステップ#06)。その後、車両制御補助装置1は、アクセルセンサ19により検出されるアクセル開度Afに基づいて、アクセルオンの操作がなされたか否かについて判断する(ステップ#07)。アクセルオンの操作がなされない場合には(ステップ#07:NO)、自車両6の減速制御が継続していると判断できる。そこで次に、自車両6の現在車速Vaが目標車速Vtに到達したか否かについて判断する(ステップ#08)。そして、現在車速Vaが目標車速Vtに到達していない場合には(ステップ#08:NO)、処理はステップ#04へ戻り、新たに現在車速Vaの情報、現在位置の情報及びブレーキ踏力Bfの情報を取得し、報知情報Aの内容を更新して表示装置により報知する(ステップ#04〜#06)。これらのステップ#04〜#08の処理は、所定の時間間隔で繰り返し行われる。なお、このステップ#04〜#08の処理が繰り返し行われる所定の時間間隔は、例えば、10〜50ms程度とすることができる。そして、アクセルオンの操作がなされた場合には(ステップ#07:YES)、自車両6が加速すると判断できるので、減速制御のための本車両制御補助装置1による処理を終了する。また、現在車速Vaが目標車速Vtに到達した場合には(ステップ#08:YES)、減速制御が終了したと判断できるので本車両制御補助装置1による処理を終了する。
【0069】
次に、ステップ#02の減速目標点Pt及び目標車速Vtを決定する処理について詳細に説明する。この処理は、演算処理部17の減速目標点決定部24及び目標車速決定部25において行われる。図10に示すように、この処理では、まず、画像情報処理部3及びレーダ情報処理部5における処理の結果、自車両6の進行方向に先行車両7が検出されるか否かについて判断する(ステップ#11)。先行車両7が検出された場合には(ステップ#11:YES)、画像情報処理部3及びレーダ情報処理部5における処理の結果に基づいて、先行車両7までの現在車間距離Laを検出する(ステップ#12)。次に、先行車両7が移動中であるか否かについて判断する(ステップ#13)。この判断は、車速センサ18により検出される現在車速Vaと、ステップ#12で検出される現在車間距離Laの変化量とに基づいて行うことができる。すなわち、現在車間距離Laの減少量が現在車速Vaによる自車両6の進行距離とほぼ同じである場合には先行車両7は停止中であり、それ以外の場合には先行車両7は移動中であると判断できる。
【0070】
先行車両7が停止中である場合には(ステップ#13:NO)、減速目標点決定部24において、先行車両7に対して所定の停止車間距離だけ進行方向後方の地点を減速目標点Ptに決定する(ステップ#14)。ここで、停止車間距離は、上記のとおり、目標車速Vtがゼロの場合(Vb=0)における、目標車速Vtに応じて定まる目標車間距離Lbの値である。その後、目標車速決定部25において、先行車両7の車速Vb(Vb=0)に合わせて目標車速Vtをゼロに決定する(ステップ#15)。これにより処理は終了する。
【0071】
一方、ステップ#13の判断の結果、先行車両7が移動中である場合には(ステップ#13:YES)、先行車両7の車速Vbを検出する(ステップ#16)。この先行車両7の車速Vbは、上述のとおり、画像情報処理部3及びレーダ情報処理部5における処理の結果として得られる車間距離Laの時間に従った変化量に基づいて算出することができる。次に、目標車速決定部25において、先行車両7の車速Vbを自車両6の目標車速Vtに決定する(ステップ#17)。そして、目標車速Vtに応じて目標車間距離Lbを決定する(ステップ#18)。その後、車速センサ18からの現在車速Vaの情報、及びロケーション部9からの自車位置情報に基づく現在位置の情報を取得する(ステップ#19)。ここで取得される現在位置は、アクセルオフが検出されたとき(ステップ#01)の自車位置であり、減速制御の開始地点Po(図2及び図3参照)となる。そして、減速目標点決定部24において、現在車速Va、目標車速Vt、現在位置(開始地点Po)、及び目標車間距離Lbに基づいて、減速目標点Ptを決定する(ステップ#20)。具体的には、減速目標点決定部24は、上述のとおり、現在位置から減速目標点Ptまでの減速距離Ltを上記の式(1)により算出し、自車両6の現在位置から進行方向に減速距離Ltだけ進んだ地点を減速目標点Ptとして決定する処理を行う。
【0072】
また、ステップ#11の判断の結果、先行車両7が検出されない場合には(ステップ#11:NO)、画像情報処理部3による画像認識処理の結果及びロケーション部9の停止目標地物位置抽出部14による停止目標地物8の抽出結果に基づいて、停止目標地物8が検出されるか否かについて判断する(ステップ#21)。停止目標地物8が検出されない場合には(ステップ#21:NO)、処理は終了する。停止目標地物8が検出された場合には(ステップ#21:YES)、減速目標点決定部24において、当該検出された停止目標地物8に応じて定められた地点を減速目標点Ptに決定する(ステップ#22)。具体的には、減速目標点決定部24は、上述のとおり、停止目標地物8に応じて予め定められた車両停止位置を減速目標点Ptとして決定する。その後、処理はステップ#15へ進み、目標車速決定部25において、目標車速Vtをゼロに決定する(ステップ#15)。これにより処理は終了する。
【0073】
次に、ステップ#03の減速目標点Ptまでの理想車速及び理想ブレーキ踏力を決定する処理について詳細に説明する。この処理は、演算処理部17の理想車速決定部26及び理想ブレーキ操作量決定部27において行われる。図11に示すように、この処理では、まず、車速センサ18からの現在車速Vaの情報、及びロケーション部9からの自車位置情報に基づく現在位置の情報を取得する(ステップ#31)。ここで取得される現在位置は、アクセルオフが検出されたとき(ステップ#01)の自車位置であり、減速制御の開始地点Po(図2及び図3参照)となる。次に、上記ステップ#02で決定された減速目標点Pt及び目標車速Vtの情報を取得する(ステップ#32)。そして、現在位置(開始地点Po)及び減速目標点Ptの情報から開始地点Poから減速目標点Ptまでの減速距離Ltを算出する(ステップ#33)。次に、現在車速Va、目標車速Vt、及び減速距離Ltに基づいて、理想車速パターンデータベース32から理想車速パターン情報を選択し、当該選択された理想車速パターン情報に関連付けられた理想ブレーキ踏力パターン情報を理想ブレーキ操作量パターンデータベース33から選択する(ステップ#34)。そして、ステップ#34で選択された理想車速パターン情報を理想車速線Mとして決定し、ステップ#34で選択された理想ブレーキ踏力パターン情報を理想ブレーキ踏力線Nとして決定する(ステップ#35)。また、ステップ#34で選択された理想ブレーキ踏力パターン情報に関連付けられて記憶されている理想ブレーキ踏力範囲情報を理想ブレーキ踏力範囲Rとして決定する(ステップ#36)。このようにして決定された理想車速線Mに規定されている車速が、現在位置(開始地点Po)から減速目標点Ptまでの間の各地点での理想車速となる。また、決定された理想ブレーキ踏力線Nに対応する理想ブレーキ踏力範囲R内のブレーキ踏力が、現在位置(開始地点Po)から減速目標点Ptまでの間の各地点での理想ブレーキ踏力の範囲となる。
【0074】
〔第二の実施形態〕
次に、本発明の第二の実施形態に係る車両制御補助装置1について説明する。本実施形態に係る車両制御補助装置1は、報知情報生成部28により生成する報知情報Aの内容において上記第一の実施形態とは異なる。その他の構成については、上記第一の実施形態と同様とすることができる。
【0075】
図12は、本実施形態に係る報知情報Aの例を示す図である。この図に示すように、ここでは、報知情報Aは、表示装置30に表示するための画像情報であり、理想車速と現在車速Vaとの関係、及び理想車速と現在のブレーキ踏力Bfに基づく将来の予想車速との関係を表示する情報となっている。また、この報知情報Aは、現在のブレーキ踏力Bfで減速した場合に目標車速Vtとなる将来の予想減速点の位置を示す情報を更に含んでいる。この図12に示す報知情報Aは、図5に示す理想車速線M並びに理想ブレーキ踏力線N及び理想ブレーキ踏力範囲Rが決定された場合、すなわち減速目標点Ptでの目標車速Vtがゼロ(Vt=0)である場合の例を示している。なお、本実施形態においても、上記第一の実施形態と同様に、ブレーキセンサ21により検出されるブレーキ踏力Bfが、本発明における「ブレーキ操作量」に相当する。
【0076】
図12に示す報知情報Aは、理想車速線Mと現在車速Vaとを対比可能に表示する情報となっている。また、報知情報Aは、理想車速と現在のブレーキ踏力Bfに基づく将来の予想車速とを対比可能に表示するとともに、減速目標点Ptの位置と現在のブレーキ踏力Bfで減速した場合に目標車速Vtとなる将来の予想減速点の位置とを対比可能に表示する構成となっている。具体的には、報知情報Aは、横軸を距離、縦軸を車速とするグラフ上に理想車速線Mを表示している。また、横軸に沿って減速目標点Ptを表す目標位置表示35及び自車位置を表す自車位置表示36を配置している。そして、自車位置表示36の上方に、現在位置及び現在車速Vaを表すグラフ上の点である現在車速・位置表示43を配置している。これにより、自車両6の現在位置及び現在車速Vaを理想車速線Mと対比可能に表示している。更に、報知情報Aは、現在車速・位置表示43を起点とし、現在のブレーキ踏力Bfに基づく将来の予想車速を表示する予想車速線表示44を有している。これにより、理想車速と現在のブレーキ踏力Bfに基づく将来の予想車速とを対比可能に表示している。そして、この予想車速線表示44が横軸と交差する点に、現在のブレーキ踏力Bfで減速した場合に目標車速Vtとなる将来の予想減速点の位置を表示する予想位置表示45を配置している。これにより、減速目標点Ptの位置と現在のブレーキ踏力Bfで減速した場合に目標車速Vtとなる将来の予想減速点の位置とを対比可能に表示している。
【0077】
このようにして報知情報生成部28により生成された報知情報Aは、表示装置30に表示される。これにより、報知情報Aは自車両6の運転者に対して報知される。
【0078】
〔第三の実施形態〕
次に、本発明の第三の実施形態に係る車両制御補助装置1について説明する。本実施形態に係る車両制御補助装置1は、減速目標点Ptまでの間の理想車速を決定することなく、減速目標点Ptにおいて目標車速Vtとなるための減速目標点Ptまでの間の理想ブレーキ操作量のみを決定し、報知情報Aとして、理想ブレーキ操作量と現在のブレーキ操作量Bfとの関係を示す情報を生成する構成である点で上記第一の実施形態とは異なる。このため、本実施形態に係る車両制御補助装置1では、理想車速決定部26を備える必要がない点でも上記第一の実施形態とは異なる。その他の構成については、上記第一の実施形態と同様とすることができる。
【0079】
本実施形態においては、理想ブレーキ操作量決定部27は、理想ブレーキ操作量パターンデータベース33に記憶されている複数の理想ブレーキ踏力パターン情報の中から、現状の開始地点Poでの現在車速Vao、目標車速Vt、及び減速距離Ltに一致する理想ブレーキ踏力パターン情報を選択し、当該選択された理想ブレーキ踏力パターン情報を理想ブレーキ踏力線Nとして決定する。この際、現状の開始地点Poでの現在車速Vao、目標車速Vt、及び減速距離Ltに一致する理想ブレーキ踏力パターン情報が存在しない場合には、最も近い理想ブレーキ踏力パターン情報を選択する。また、理想ブレーキ操作量決定部27は、選択された理想ブレーキ踏力パターン情報に関連付けられて記憶されている理想ブレーキ踏力範囲情報を理想ブレーキ踏力範囲Rとして決定する。
【0080】
報知情報生成部28は、理想ブレーキ踏力線N及び理想ブレーキ踏力範囲Rにより規定される理想ブレーキ踏力とブレーキセンサ21により検出される現在のブレーキ踏力Bfとの関係を示す報知情報Aを生成する処理を行う。図13は、本実施形態に係る報知情報Aの例を示す図である。この図に示すように、ここでは、報知情報Aは、表示装置30に表示するための画像情報であり、理想ブレーキ踏力範囲Rと現在のブレーキ踏力Bfとの差を表示し、自車両6の運転者に報知する情報となっている。
【0081】
図13に示す報知情報Aは、理想ブレーキ踏力範囲Rと現在のブレーキ踏力Bfとを対比可能に表示する情報であって、ここでは、上記第一の実施形態に係る図8に示される報知情報Aのブレーキ踏力表示情報A2と同様の構成を有している。すなわち、この報知情報Aは、ブレーキ踏力の最大値(MAX)から最小値(0)までのブレーキ踏力領域を表す長方形状の踏力領域表示39を有している。また、この踏力領域表示39上に、理想ブレーキ操作量決定部27において決定された理想ブレーキ踏力範囲Rを表す理想踏力範囲表示40と、現在のブレーキ踏力Bfを表す現在踏力表示41とを対比可能に表示している。更に、理想踏力範囲表示40の上又は下にブレーキ踏力Bfの変化方向を表示する変化方向表示42を配置している。
【0082】
〔第四の実施形態〕
次に、本発明の第四の実施形態に係る車両制御補助装置1について説明する。本実施形態に係る車両制御補助装置1は、減速目標点Ptまでの間の理想ブレーキ操作量を決定することなく、減速目標点Ptにおいて目標車速Vtとなるための減速目標点Ptまでの間の理想車速のみを決定し、報知情報Aとして、理想車速と現在車速Vaとの関係を示す情報を生成する構成である点で上記第一の実施形態とは異なる。このため、本実施形態に係る車両制御補助装置1では理想ブレーキ操作量決定部27を備える必要がない点でも上記第一の実施形態とは異なる。その他の構成については、上記第一の実施形態と同様とすることができる。
【0083】
本実施形態においては、報知情報生成部28は、理想車速線Mにより規定される理想車速と車速センサ18により検出される現在車速Vaとの関係を示す報知情報Aを生成する処理を行う。具体的には、図示は省略するが、上記第一の実施形態に係る図8に示される報知情報Aの車速表示情報A1と同様の構成を有する情報とすることができる。
【0084】
〔第五の実施形態〕
次に、本発明の第五の実施形態に係る車両制御補助装置1について説明する。本実施形態に係る車両制御補助装置1は、図示は省略するが、理想ブレーキ踏力と現在のブレーキ踏力との差、及び理想車速と現在車速との差に基づいて、理想ブレーキ踏力を補正する理想ブレーキ操作量補正部を演算処理部17内に更に備える点で、上記第一の実施形態とは異なる。その他の構成については、上記第一の実施形態と同様とすることができる。すなわち、ブレーキ操作量に対する車速の変化の程度は、道路状況、道路勾配、天候等に応じて変化することが多い。この理想ブレーキ操作量補正部は、このようなブレーキ操作量に対する車速変化のずれを補正するものである。
【0085】
本実施形態においては、理想ブレーキ操作量補正部は、ブレーキセンサ21により検出される現在のブレーキ踏力Bfが、理想ブレーキ踏力範囲R内にあるにも関わらず、車速センサ18により検出される現在車速Vaが、理想車速線Mにより規定される理想車速と同様の変化をしない場合に、理想ブレーキ踏力線N及び理想ブレーキ踏力範囲Rを補正する処理を行う。この際、理想ブレーキ操作量補正部は、自車両6の進行距離に対する現在車速Vaの変化量と理想車速線Mにより規定される理想車速の変化量との差に応じて定まる補正係数を用いる。そして、この補正係数を、理想ブレーキ踏力線Nの各地点での値に乗算することにより、理想ブレーキ踏力線Nに規定される理想ブレーキ踏力を各地点での値に応じて増減させて補正する。この際、理想ブレーキ踏力範囲Rは、その幅は変化させずに理想ブレーキ踏力線Nの補正量に合わせて補正する。
本実施形態においては、理想ブレーキ操作量補正部が本発明における「理想ブレーキ操作量補正手段」を構成する。
【0086】
〔第六の実施形態〕
次に、本発明の第六の実施形態に係る車両制御補助装置1について説明する。本実施形態に係る車両制御補助装置1は、図示は省略するが、報知情報Aの内容に基づいてブレーキ量及び車速の一方又は双方を自動制御する自動制御部を演算処理部17内に更に備えている点で、上記第一の実施形態とは異なる。この自動制御部は、車両制御装置等を介して自車両6のブレーキ装置やスロットル装置等に接続され、これらを制御可能に構成されている。その他の構成については、上記第一の実施形態と同様とすることができる。そして、前記自動制御部は、表示装置30(報知手段48の一例)による報知情報Aの報知中に、報知情報Aの内容を含む自車両の状態が所定の条件を満たすときに、自車両6のブレーキ量及び車速の一方又は双方の自動制御を実行する処理を行う。なお、本実施形態においては、自動制御部が本発明における「自動制御手段」を構成する。
【0087】
図14は、本実施形態に係る車両制御補助装置1の動作処理の一例を示すフローチャートである。本例では、自動制御部は、表示装置30による報知情報Aの報知開始から予め定めた所定距離を走行した時点において、ブレーキ踏力Bfが理想ブレーキ踏力範囲R内でない場合に、自車両6のブレーキ量及び車速の一方又は双方の自動制御を実行する処理を行う。
【0088】
この図14に示すフローチャートのステップ#41〜#47については、上記第一の実施形態に係る図9のステップ#01〜#07と同様であるので、説明は省略する。そして本例では、ステップ#45において生成された報知情報Aを表示装置30に表示することにより報知した後(ステップ#46)、アクセルオンの操作がなされない場合には(ステップ#47:NO)、表示装置30による最初の報知情報Aの報知開始から、自車両6が予め定めた所定距離を走行したか否かについて判断する(ステップ#48)。ここで、所定距離は、減速目標点Ptまでの減速距離Lt以下の距離で設定することが可能であり、例えば前記減速距離Ltの2分の1等とすることができる。そして、報知情報Aの報知開始から所定距離を走行した場合には(ステップ#48:YES)、ステップ#44で取得した現在のブレーキ踏力Bfが、ステップ#43で決定した理想ブレーキ踏力範囲Rであるか否かについて判断する(ステップ#49)。
【0089】
そして、ブレーキ踏力Bfが理想ブレーキ踏力範囲Rでない場合には(ステップ#49:NO)、自動制御部によりブレーキ量及び車速の一方又は双方の自動制御を行う(ステップ#50)。そして、自車両6の現在車速Vaが目標車速Vtに到達するまで(ステップ#51:YES)、自動制御を継続する。自動制御部による自動制御では、ステップ#43において決定された理想ブレーキ操作量(理想ブレーキ踏力線N)に近づけるようにブレーキ量の制御を行い、又はステップ#43において決定された理想車速(理想車速線M)に近づけるように車速の制御を行う。一方、報知情報Aの報知開始から所定距離を走行していない場合(ステップ#48:NO)、又はブレーキ踏力Bfが理想ブレーキ踏力範囲Rである場合(ステップ#49:YES)には、処理はステップ#51へ進む。このステップ#51の処理は、上記第一の実施形態に係る図9のステップ#08と同様であるので、説明は省略する。
【0090】
また、上記の例以外にも、自動制御部は、表示装置30による報知情報Aの報知開始から予め定めた所定時間が経過した時点において、現在のブレーキ踏力Bfが理想ブレーキ踏力範囲R内でない場合に自動制御を実行する処理を行う構成や、現在のブレーキ踏力Bfが理想ブレーキ踏力範囲R内でない時間が所定時間以上継続した場合に自動制御を実行する処理を行う構成とすることも好適な実施形態の一つである。
【0091】
本実施形態に係る車両制御補助装置1によれば、報知情報Aの報知を行ったにも関わらず運転者による適切なブレーキ操作等が行われない場合に、自動制御部による制御によって、適切に自車両6のブレーキ量及び車速の一方又は双方を制御することができる。
【0092】
また、自動制御部による自動制御(ステップ#50)を開始した後、更に所定距離を走行した後や更に所定時間が経過した後に、自動制御を終了し、報知情報Aの報知のみを行う処理とすることも好適な実施形態の一つである。また、アクセルオフの操作がなされた後(ステップ#41:YES)、すぐに自動制御部による自動制御を開始し、その後所定距離を走行した後や所定時間が経過した後に、自動制御を終了し、報知情報Aの報知のみを行う処理とすることも好適な実施形態の一つである。このような処理とすることにより、減速制御の最終段階では、運転者が自ら操作を行うことになるので、運転者の好みに合った車両制御が行われることになる。
【0093】
また、自動制御部による自動制御中は、表示装置30による報知情報Aの報知を中断することも可能であるが、自動制御中も報知情報Aの報知を継続することも好適な実施形態の一つである。この際、現在のブレーキ踏力Bfの表示は、自動制御部により制御されているブレーキ量に対応する表示が行われる。また、自動制御部による自動制御中は、表示装置30や音声出力装置31等により、自動制御中であることを運転者に報知する制御を行うと好適である。その場合、例えば、表示装置30に「現在自動制御中」との文字を表示し、或いは音声出力装置31により「現在自動制御中です」との案内音声を出力したりすることができる。
【0094】
〔その他の実施形態〕
(1)上記の各実施形態においては、表示装置30を報知手段48とし、報知情報Aは表示装置30に表示するための画像情報とする場合について説明した。しかし、本発明に係る報知手段48は表示装置30に限定されるものではなく、報知情報Aを音声により報知する音声出力装置31や、報知情報Aを振動により報知するシート等に設けた振動発生装置(図示省略)等を報知手段48とすることも、本発明の好適な実施形態の一つである。
例えば、音声出力装置31を報知手段48とする場合、理想車速と現在車速Vaとの差や理想ブレーキ踏力と現在のブレーキ踏力Bfとの差等に応じて異なる音量、音質、音声パターン等の音声情報を出力する。ここで、車速の差やブレーキ踏力の差には、その差の絶対値に加えてその差の方向(理想値に対する上下関係)を含むものとする。このような音声情報を報知情報Aとして音声出力装置31から出力することにより、自車両6の運転者に対して、理想車速と現在車速Vaとの差や理想ブレーキ踏力と現在のブレーキ踏力Bfとの差を報知することができる。
また、振動発生装置を報知手段48とする場合においても同様に、理想車速と現在車速Vaとの差や理想ブレーキ踏力と現在のブレーキ踏力Bfとの差等に応じて異なる振幅、振動数、振動パターン等の振動情報を出力する。
また、報知手段48が、上記の画像、音声、及び振動の2つ以上を組み合わせて報知する構成とすることも好適な実施形態の一つである。
【0095】
(2)また、報知情報を、自車両6の運転者に対してではなく、自車両6の車両制御装置に対して報知する情報とすることも本発明の好適な実施形態の一つである。この場合、報知情報生成手段は、理想ブレーキ操作量と現在のブレーキ操作量との関係、及び理想車速と前記現在車速との関係の一方又は双方を示す情報を、車両制御装置に対して出力可能な形式の報知情報として生成する。またこの場合、報知手段は、報知情報生成手段を構成する演算処理部と車両制御装置とをつなぐ通信装置等により構成される。これにより、自車両6の車両制御装置は、理想ブレーキ操作量と現在のブレーキ操作量との関係、及び理想車速と前記現在車速との関係の一方又は双方を示す情報を取得することができる。したがって、車両制御装置は、ブレーキ装置に対して、現在のブレーキ操作量を理想ブレーキ操作量に近づけるように、或いは、現在の車速を理想車速に近づけるように、ブレーキ操作信号を出力してブレーキ操作を行うことが可能となる。そして、自車両6のブレーキ操作量を適切に制御して理想的な減速制御を行うことができる。
【0096】
(3)上記の各実施形態においては、理想車速決定部26は、理想車速パターンデータベース32に記憶されている複数の理想車速パターン情報の中から一つを選択することにより理想車速線Mを決定し、理想ブレーキ操作量決定部27は、理想ブレーキ操作量パターンデータベース33に記憶されている複数の理想ブレーキ踏力パターン情報の中から一つを選択することにより理想ブレーキ踏力線Nを決定し、それらに基づいて理想車速及び理想ブレーキ踏力を決定する場合について説明した。しかし、本発明の適用範囲はこれに限定されない。すなわち、理想車速決定部26が、車速センサ18により検出された現在車速Va、減速目標点決定部24により決定された減速目標点Pt、及び目標車速決定部25により決定された目標車速Vtに基づいて、減速目標点Ptにおいて目標車速Vtとなるための目標減速点Ptまでの間の理想車速を、所定の演算式等に基づいて演算して決定する構成とすることも好適な実施形態の一つである。同様に、理想ブレーキ操作量決定部27が、現在車速Va、減速目標点Pt、及び目標車速Vtに基づいて、減速目標点Ptにおいて目標車速Vtとなるための目標減速点Ptまでの間の理想ブレーキ操作量を、所定の演算式等に基づいて演算して決定する構成とすることも好適な実施形態の一つである。また、理想車速決定部26は、理想車速パターンデータベース32に記憶されている複数の理想車速パターン情報の中から一つを選択することにより理想車速線Mを決定し、理想ブレーキ操作量決定部27が、当該理想車速線Mに基づいて理想ブレーキ操作量を演算して決定する構成とすることも好適な実施形態の一つである。
【0097】
(4)上記の各実施形態においては、撮像装置2及びレーダ4により先行車両7(図2参照)や停止目標地物8(図3参照)を検出し、減速目標点を決定する場合について説明した。しかし、本発明の適用範囲はこれに限定されず、例えば、歩行者、自転車、路肩に停車中の車両、道路上の落下物等、或いは道路形状等を検出し、その検出結果に基づいて車両制御補助を行う構成とすることも、本発明の好適な実施形態の一つである。
【0098】
(5)上記第五の実施形態においては、理想ブレーキ踏力と現在のブレーキ踏力との差、及び理想車速と現在車速との差に基づいて、理想ブレーキ踏力を補正する理想ブレーキ操作量補正部を備える構成について説明した。しかし、理想ブレーキ踏力を補正するための構成は、これに限定されるものではない。例えば、道路状況、道路勾配、天候を撮像装置2等から直接的に検知し、検知された状況に応じて理想ブレーキ操作量を補正する構成とすることも好適な実施形態の一つである。この場合、道路状況等に応じて予め定めた所定の補正係数を用い、この補正係数を、理想ブレーキ踏力線Nの各地点での値に乗算することにより、理想ブレーキ踏力線Nに規定される理想ブレーキ踏力を各地点での値に応じて増減させて補正することができる。また、理想ブレーキ操作量パターンデータベース33に、予め道路状況等に応じて異なる複数の理想ブレーキ踏力パターン情報を記憶しておき、道路状況等に応じて適切な理想ブレーキ踏力パターン情報を選択する構成とすることもできる。
【図面の簡単な説明】
【0099】
【図1】本発明の第一の実施形態に係る車両制御補助装置の構成を示すブロック図
【図2】自車両の進行方向に先行車両が存在する場合の減速目標点及び目標車速の決定方法の説明図
【図3】自車両の進行方向に停止目標地物が存在する場合の減速目標点及び目標車速の決定方法の説明図
【図4】地図データベースに格納されている地図情報の内容を示す説明図
【図5】理想車速線並びに理想ブレーキ踏力線及び理想ブレーキ踏力範囲の一例を示す図
【図6】理想車速パターンデータベースに記憶されている理想車速パターン情報の例を示す図
【図7】理想ブレーキ操作量パターンデータベースに記憶されている理想ブレーキ踏力パターン情報の例を示す図
【図8】本発明の第一の実施形態に係る報知情報の例を示す図
【図9】本発明の第一の実施形態に係る車両制御補助装置の全体の動作処理を示すフローチャート
【図10】図9のステップ#02の処理の詳細を示すフローチャート
【図11】図9のステップ#03の処理の詳細を示すフローチャート
【図12】本発明の第二の実施形態に係る報知情報の例を示す図
【図13】本発明の第三の実施形態に係る報知情報の例を示す図
【図14】本発明の第六の実施形態に係る車両制御補助装置の動作処理を示すフローチャート
【符号の説明】
【0100】
1:車両制御補助装置
6:自車両
7:先行車両
8:停止目標地物
15:先行車両検出手段
16:停止目標地物検出手段
18:車速センサ(車速検出手段)
21:ブレーキセンサ(ブレーキ操作量検出手段)
24:減速目標点決定部(減速目標点決定手段)
25:目標車速決定部(目標車速決定手段)
28:報知情報生成部(報知情報生成手段)
46:理想車速決定手段
47:理想ブレーキ操作量決定手段
48:報知手段
A:報知情報
Va:現在車速
Vb:先行車両の車速
Vt:目標車速
Bf:ブレーキ踏力
Pt:減速目標点
La:現在車間距離
Lb:目標車間距離
M:理想車速線
N:理想ブレーキ踏力線
R:理想ブレーキ踏力範囲
【特許請求の範囲】
【請求項1】
自車両の現在車速を検出する車速検出手段と、
自車両のブレーキ操作量を検出するブレーキ操作量検出手段と、
自車両の減速制御の目標点である減速目標点を決定する減速目標点決定手段と、
前記減速目標点における目標車速を決定する目標車速決定手段と、
前記現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想ブレーキ操作量を決定する理想ブレーキ操作量決定手段と、
前記理想ブレーキ操作量と現在のブレーキ操作量との関係を示す報知情報を生成する報知情報生成手段と、
前記報知情報生成手段により生成された前記報知情報を報知する報知手段と、
を備える車両制御補助装置。
【請求項2】
前記報知情報は、前記理想ブレーキ操作量と現在のブレーキ操作量との差を前記報知手段により運転者に報知するための情報である請求項1に記載の車両制御補助装置。
【請求項3】
前記理想ブレーキ操作量決定手段は、前記減速目標点までの距離との関係でブレーキ操作量を規定する複数の理想ブレーキ操作量パターン情報を有し、前記現在車速、前記目標車速、及び自車両の現在位置から前記減速目標点までの距離に基づいて、一つの理想ブレーキ操作量パターン情報を選択し、当該選択された理想ブレーキ操作量パターン情報に従って前記理想ブレーキ操作量を決定する請求項1又は2に記載の車両制御補助装置。
【請求項4】
前記現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想車速を決定する理想車速決定手段を更に備え、
前記報知情報生成手段は、前記理想車速と前記現在車速との関係、及び前記理想ブレーキ操作量と現在のブレーキ操作量との関係を示す報知情報を生成する請求項1に記載の車両制御補助装置。
【請求項5】
前記現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想車速を決定する理想車速決定手段を更に備え、
前記報知情報生成手段は、前記理想車速と前記現在車速との関係、及び前記理想車速と現在のブレーキ操作量に基づく将来の予想車速との関係を示す報知情報を生成する請求項1に記載の車両制御補助装置。
【請求項6】
前記報知情報は、現在のブレーキ操作量で減速した場合に前記目標車速となる将来の予想減速点の位置を示す情報を更に含む請求項4又は5に記載の車両制御補助装置。
【請求項7】
前記理想ブレーキ操作量と現在のブレーキ操作量との差、及び前記理想車速と前記現在車速との差に基づいて、前記理想ブレーキ操作量を補正する理想ブレーキ操作量補正手段を更に備える請求項4から6の何れか一項に記載の車両制御補助装置。
【請求項8】
自車両の現在車速を検出する車速検出手段と、
自車両のブレーキ操作量を検出するブレーキ操作量検出手段と、
自車両の減速制御の目標点である減速目標点を決定する減速目標点決定手段と、
前記減速目標点における目標車速を決定する目標車速決定手段と、
前記現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想車速を決定する理想車速決定手段と、
前記理想車速と前記現在車速との関係を示す報知情報を生成する報知情報生成手段と、
前記報知情報生成手段により生成された前記報知情報を報知する報知手段と、
を備える車両制御補助装置。
【請求項9】
前記理想車速決定手段は、前記減速目標点までの距離との関係で車速を規定する複数の理想車速パターン情報を有し、前記現在車速、前記目標車速、及び自車両の現在位置から前記減速目標点までの距離に基づいて、一つの理想車速パターン情報を選択し、当該選択された理想車速パターン情報に従って前記理想車速を決定する請求項4から8の何れか一項に記載の車両制御補助装置。
【請求項10】
前記報知手段は、前記報知情報を画像、音声、及び振動のいずれか一つ以上により報知する請求項1から9の何れか一項に記載の車両制御補助装置。
【請求項11】
自車両の進行方向に存在する先行車両を検出する先行車両検出手段を更に備え、
前記減速目標点決定手段は、先行車両に対して所定の車間距離を確保できる点を減速目標点として決定し、
前記目標車速決定手段は、前記先行車両の車速を目標車速として決定する請求項1から10の何れか一項に記載の車両制御補助装置。
【請求項12】
停止目標地物を検出する停止目標地物検出手段を更に備え、
前記減速目標点決定手段は、前記先行車両検出手段により前記先行車両が検出されない場合には、前記停止目標地物に応じた車両停止位置を減速目標点として決定し、
前記目標車速決定手段は、目標車速をゼロに決定する請求項11に記載の車両制御補助装置。
【請求項13】
自車両の減速時に、その減速制御の目標点である減速目標点に到達するまでの間の理想的なブレーキ操作量である理想ブレーキ操作量範囲に対する現在のブレーキ操作量の関係を示す報知情報を生成する報知情報生成手段と、
前記報知情報生成手段により生成された前記報知情報を報知する報知手段と、
を備える車両制御補助装置。
【請求項14】
前記報知情報に基づいてブレーキ量及び車速の一方又は双方を自動制御する自動制御手段を更に備え、
前記報知手段による前記報知情報の報知中に、前記報知情報の内容を含む自車両の状態が所定の条件を満たすときに、前記自動制御手段による自動制御を実行する請求項1から13の何れか一項に記載の車両制御補助装置。
【請求項15】
自車両の減速制御の目標点である減速目標点を決定する減速目標点決定ステップと、
前記減速目標点における目標車速を決定する目標車速決定ステップと、
自車両の現在車速を検出し、該現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想ブレーキ操作量を決定する理想ブレーキ操作量決定ステップと、
自車両の現在のブレーキ操作量を検出し、前記理想ブレーキ操作量と前記現在のブレーキ操作量との関係を示す報知情報を生成する報知情報生成ステップと、
前記報知情報生成ステップにより生成された前記報知情報を報知する報知ステップと、
を備える車両制御補助方法。
【請求項16】
自車両の減速制御の目標点である減速目標点を決定する減速目標点決定ステップと、
前記減速目標点における目標車速を決定する目標車速決定ステップと、
自車両の現在車速を検出し、該現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想車速を決定する理想車速決定ステップと、
前記理想車速と前記現在車速との関係を示す報知情報を生成する報知情報生成ステップと、
前記報知情報生成ステップにより生成された前記報知情報を報知する報知ステップと、
を備える車両制御補助方法。
【請求項1】
自車両の現在車速を検出する車速検出手段と、
自車両のブレーキ操作量を検出するブレーキ操作量検出手段と、
自車両の減速制御の目標点である減速目標点を決定する減速目標点決定手段と、
前記減速目標点における目標車速を決定する目標車速決定手段と、
前記現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想ブレーキ操作量を決定する理想ブレーキ操作量決定手段と、
前記理想ブレーキ操作量と現在のブレーキ操作量との関係を示す報知情報を生成する報知情報生成手段と、
前記報知情報生成手段により生成された前記報知情報を報知する報知手段と、
を備える車両制御補助装置。
【請求項2】
前記報知情報は、前記理想ブレーキ操作量と現在のブレーキ操作量との差を前記報知手段により運転者に報知するための情報である請求項1に記載の車両制御補助装置。
【請求項3】
前記理想ブレーキ操作量決定手段は、前記減速目標点までの距離との関係でブレーキ操作量を規定する複数の理想ブレーキ操作量パターン情報を有し、前記現在車速、前記目標車速、及び自車両の現在位置から前記減速目標点までの距離に基づいて、一つの理想ブレーキ操作量パターン情報を選択し、当該選択された理想ブレーキ操作量パターン情報に従って前記理想ブレーキ操作量を決定する請求項1又は2に記載の車両制御補助装置。
【請求項4】
前記現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想車速を決定する理想車速決定手段を更に備え、
前記報知情報生成手段は、前記理想車速と前記現在車速との関係、及び前記理想ブレーキ操作量と現在のブレーキ操作量との関係を示す報知情報を生成する請求項1に記載の車両制御補助装置。
【請求項5】
前記現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想車速を決定する理想車速決定手段を更に備え、
前記報知情報生成手段は、前記理想車速と前記現在車速との関係、及び前記理想車速と現在のブレーキ操作量に基づく将来の予想車速との関係を示す報知情報を生成する請求項1に記載の車両制御補助装置。
【請求項6】
前記報知情報は、現在のブレーキ操作量で減速した場合に前記目標車速となる将来の予想減速点の位置を示す情報を更に含む請求項4又は5に記載の車両制御補助装置。
【請求項7】
前記理想ブレーキ操作量と現在のブレーキ操作量との差、及び前記理想車速と前記現在車速との差に基づいて、前記理想ブレーキ操作量を補正する理想ブレーキ操作量補正手段を更に備える請求項4から6の何れか一項に記載の車両制御補助装置。
【請求項8】
自車両の現在車速を検出する車速検出手段と、
自車両のブレーキ操作量を検出するブレーキ操作量検出手段と、
自車両の減速制御の目標点である減速目標点を決定する減速目標点決定手段と、
前記減速目標点における目標車速を決定する目標車速決定手段と、
前記現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想車速を決定する理想車速決定手段と、
前記理想車速と前記現在車速との関係を示す報知情報を生成する報知情報生成手段と、
前記報知情報生成手段により生成された前記報知情報を報知する報知手段と、
を備える車両制御補助装置。
【請求項9】
前記理想車速決定手段は、前記減速目標点までの距離との関係で車速を規定する複数の理想車速パターン情報を有し、前記現在車速、前記目標車速、及び自車両の現在位置から前記減速目標点までの距離に基づいて、一つの理想車速パターン情報を選択し、当該選択された理想車速パターン情報に従って前記理想車速を決定する請求項4から8の何れか一項に記載の車両制御補助装置。
【請求項10】
前記報知手段は、前記報知情報を画像、音声、及び振動のいずれか一つ以上により報知する請求項1から9の何れか一項に記載の車両制御補助装置。
【請求項11】
自車両の進行方向に存在する先行車両を検出する先行車両検出手段を更に備え、
前記減速目標点決定手段は、先行車両に対して所定の車間距離を確保できる点を減速目標点として決定し、
前記目標車速決定手段は、前記先行車両の車速を目標車速として決定する請求項1から10の何れか一項に記載の車両制御補助装置。
【請求項12】
停止目標地物を検出する停止目標地物検出手段を更に備え、
前記減速目標点決定手段は、前記先行車両検出手段により前記先行車両が検出されない場合には、前記停止目標地物に応じた車両停止位置を減速目標点として決定し、
前記目標車速決定手段は、目標車速をゼロに決定する請求項11に記載の車両制御補助装置。
【請求項13】
自車両の減速時に、その減速制御の目標点である減速目標点に到達するまでの間の理想的なブレーキ操作量である理想ブレーキ操作量範囲に対する現在のブレーキ操作量の関係を示す報知情報を生成する報知情報生成手段と、
前記報知情報生成手段により生成された前記報知情報を報知する報知手段と、
を備える車両制御補助装置。
【請求項14】
前記報知情報に基づいてブレーキ量及び車速の一方又は双方を自動制御する自動制御手段を更に備え、
前記報知手段による前記報知情報の報知中に、前記報知情報の内容を含む自車両の状態が所定の条件を満たすときに、前記自動制御手段による自動制御を実行する請求項1から13の何れか一項に記載の車両制御補助装置。
【請求項15】
自車両の減速制御の目標点である減速目標点を決定する減速目標点決定ステップと、
前記減速目標点における目標車速を決定する目標車速決定ステップと、
自車両の現在車速を検出し、該現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想ブレーキ操作量を決定する理想ブレーキ操作量決定ステップと、
自車両の現在のブレーキ操作量を検出し、前記理想ブレーキ操作量と前記現在のブレーキ操作量との関係を示す報知情報を生成する報知情報生成ステップと、
前記報知情報生成ステップにより生成された前記報知情報を報知する報知ステップと、
を備える車両制御補助方法。
【請求項16】
自車両の減速制御の目標点である減速目標点を決定する減速目標点決定ステップと、
前記減速目標点における目標車速を決定する目標車速決定ステップと、
自車両の現在車速を検出し、該現在車速、前記減速目標点及び前記目標車速に基づいて、前記減速目標点において前記目標車速となるための前記目標減速点までの間の理想車速を決定する理想車速決定ステップと、
前記理想車速と前記現在車速との関係を示す報知情報を生成する報知情報生成ステップと、
前記報知情報生成ステップにより生成された前記報知情報を報知する報知ステップと、
を備える車両制御補助方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2007−8203(P2007−8203A)
【公開日】平成19年1月18日(2007.1.18)
【国際特許分類】
【出願番号】特願2005−188204(P2005−188204)
【出願日】平成17年6月28日(2005.6.28)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成19年1月18日(2007.1.18)
【国際特許分類】
【出願日】平成17年6月28日(2005.6.28)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]