
車両前照灯の配光パターン確認システム
【課題】前照灯制御装置の制御結果としての配光パターン、照射領域、制御の善し悪しの確認等をユーザが容易に行なえるようにする。
【解決手段】前照灯制御装置(3)は制御演算部(20)と操作部(21)とを備え、制御演算部は前照灯制御装置への入力信号に基づいて配光パターンを決め、該配光パターンを実現する操作信号を演算して操作部に与える。同時にその時の入力信号と操作信号をカーナビゲーション装置(2)に送信する。操作部は操作信号に従って前照灯を操作する。カーナビゲーション装置の制御回路は前照灯制御装置から送られた入力信号と操作信号に基づいて前照灯の配光パターンを算出し、算出した配光パターンと自車位置と車体方位とを周辺地図に重ねて表示させる。
【解決手段】前照灯制御装置(3)は制御演算部(20)と操作部(21)とを備え、制御演算部は前照灯制御装置への入力信号に基づいて配光パターンを決め、該配光パターンを実現する操作信号を演算して操作部に与える。同時にその時の入力信号と操作信号をカーナビゲーション装置(2)に送信する。操作部は操作信号に従って前照灯を操作する。カーナビゲーション装置の制御回路は前照灯制御装置から送られた入力信号と操作信号に基づいて前照灯の配光パターンを算出し、算出した配光パターンと自車位置と車体方位とを周辺地図に重ねて表示させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、前照灯制御装置によって制御される車両前照灯の配光パターンを確認する技術に関する。
【背景技術】
【0002】
近年における車両の前照灯は、快適な運転を求めるユーザの要望に応えて様々な工夫が施され、その構造と制御は益々複雑化してきている。古くは光ビーム照射方向が固定されていたが、交差点などの曲路走行時に進行方向路面を十分に照射できないことからステアリングの舵角を検出し、ランプの光軸を曲がろうとする方向に移動制御する技術が開発された(例えば、文献1参照)。しかし、舵角のみで光軸の水平方向を制御するのでは、カーブに進入する前のステアリングが操作されない段階では曲がろうとする方向が照射されない。この問題を解決するために、カーナビゲーション装置の有する地図データ、経路案内機能を利用して前照灯の光軸制御を行なう技術が提案されている(例えば、特許文献2、3参照)。
【0003】
更には、このような水平方向の制御の他に、すれ違い車両にグレア(幻惑光)を与えないためのハイビーム、ロービームと呼ばれる光ビームの仰角制御も行なわれる。また、車速により運転者の注視点が変化することに注目し、車速を考慮してビームの方向と広がりの双方を制御する技術も提案されている(例えば、特許文献4参照)。
しかしながら、こうした複雑な制御の結果としての前照灯の配光パターンや照射範囲は走行中にリアルタイムで変化するものであるため、運転しているユーザにはその配光パターン、照射範囲、配光制御の善し悪し等を確認しにくいという問題がある。また、これに付随して制御が複雑すぎるためユーザには制御内容が判りにくい、不具合の発見が困難、不具合状況の再現が困難等の問題も指摘されている。
【特許文献1】特開昭62−77249号公報
【特許文献2】特開平2−296550号公報
【特許文献3】特開2002−193030号公報
【特許文献4】特開2003−123514号公報
【特許文献5】特開平9−203691号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は、このような従来技術の問題点を解決するためになされたもので、その課題は、複雑な前照灯制御の配光パターン、照射領域、制御の善し悪し等の確認をユーザが容易に行なうことができるようにし、それにより不具合点の発見、不具合程度の把握等を容易にすることにある。
【課題を解決するための手段】
【0005】
請求項1に記載の発明は、カーナビゲーション装置(2)と前照灯制御装置(3)とからなる車両前照灯の配光パターン確認システム(1)であって、前記前照灯制御装置は制御演算部(20)と操作部(21)とを備え、前記制御演算部は前照灯制御装置への入力信号に基づいて配光パターンを決め、該配光パターンを実現する操作信号を演算して前記操作部に与えると同時にその時の前記入力信号と操作信号を前記カーナビゲーション装置に送信し、前記操作部は前記操作信号に従って前照灯を操作するように構成されており、 前記カーナビゲーション装置は、自車位置検出手段と車体方位検出手段と表示装置(9)と地図データと制御回路(4)とを備え、該制御回路は前記前照灯制御装置から送られた前記入力信号と操作信号とに基づいて前照灯の配光パターンを算出し、算出した配光パターンと、前記自車位置検出手段で検出した自車位置と、前記車体方位検出手段で検出した車体方位とを、前記地図データから読み出した自車位置を中心とする周辺地図に重ねて前記表示装置上に表示させるように構成されていることを特徴とする車両前照灯の配光パターン確認システムである。
【0006】
本構成のシステムによれば、前照灯制御装置(3)の操作部(21)に与えられる操作信号(MV1〜MV8)に基づいて配光パターンが算出され、その結果が自車位置、車体方位等と共に地図上に表示される。このためユーザは、前照灯制御の制御結果としての配光パターンを容易に確認することができ、前照灯制御装置の制御性の善し悪しの判断、不具合の発見をリアルタイムで容易に行なうことができるようになる。
【0007】
また、請求項2に記載の発明は、カーナビゲーション装置(2)と前照灯制御装置(3)とからなる車両前照灯の配光パターン確認システム(1)であって、前記前照灯制御装置は制御演算部(20)と操作部(21)とを備え、前記制御演算部は前照灯制御装置への入力信号に基づいて配光パターンを決め、該配光パターンを実現する操作信号を演算して前記操作部に与えると同時にその時の前記入力信号と操作信号を前記カーナビゲーション装置に送信し、前記操作部は前記操作信号に従って前照灯を操作するように構成されており、
前記カーナビゲーション装置は、自車位置検出手段と車体方位検出手段と表示装置(9)と地図データと制御回路(4)と入力手段とを備え、前記制御回路(4)は、前記前照灯制御装置から送られた前記入力信号と操作信号をその時の自車位置と共に内部の記憶装置に記憶しておき、前記入力手段を介して指示された場合には、該記憶した情報を順次読み出して前照灯の配光パターンを算出し、算出した配光パターンと、読み出した自車位置と車体方位とを、前記地図データから読み出した自車位置を中心とする周辺地図に重ねて前記表示装置上に表示させるように構成されていることを特徴とする車両前照灯の配光パターン確認システムである。
【0008】
このように制御演算部(20)への入力信号とその出力である操作信号(MV1〜MV8)とをその時の自車位置と一緒に記録しておけば、走行を終えた後にそれらの値を読み出して配光パターンの計算と表示を何度でも実行させることができる。これによりユーザは、前照灯制御の制御結果としての配光パターンを容易に確認することができ、前照灯制御装置の制御性の善し悪しの判断、不具合の発見、不具合の再現を容易に行なうことができる。
【0009】
また、請求項3に記載の発明は、制御演算部(20)と操作部(21)とを備えた車両の前照灯制御装置(3)であって、前記制御演算部は前照灯制御装置への入力信号に基づいて配光パターンを決め、該配光パターンを実現する操作信号を演算して前記操作部に与えると同時にその時の前記入力信号と操作信号を外部の装置に送信し、前記操作部は前記操作信号に従って前照灯を操作するように構成されていることを特徴とする車両の前照灯制御装置である。
【0010】
このように制御演算部(20)の入力信号と、その出力信号であり操作部(21)にとっては入力信号である操作信号(MV1〜MV8)とを、時々刻々カーナビゲーション装置などの外部の装置に送信するようにすれば、外部の装置側にてそれらの信号に基づいて時々刻々変化する配光パターンを計算して表示することが可能になる。
【0011】
また、請求項4に記載の発明は、自車位置検出手段と車体方向検出装置と表示装置(9)と地図データと制御回路(4)とを備えたカーナビゲーション装置(2)であって、前記制御回路(4)は、請求項3に記載の前照灯制御装置(3)から送られた前記入力信号と操作信号とに基づいて前照灯の配光パターンを算出し、算出した配光パターンと、前記自車位置検出手段で検出した自車位置と、前記車体方位検出手段で検出した車体方位とを、前記地図データから読み出した自車位置を中心とする周辺地図に重ねて前記表示装置上に表示させるように構成されていることを特徴とするカーナビゲーション装置である。
【0012】
このようなカーナビゲーション装置によれば、前照灯制御装置(3)から送られた操作信号に基づいて実際の配光パターンの計算と結果の表示を行なうことが可能となる。そしてその結果を自車位置、車体方位等と共に地図上に重ねて表示することにより、ユーザは配光パターンをリアルタイムで容易に確認できるようになる。
【0013】
また、請求項5に記載の発明は、自車位置検出手段と車体方向検出装置と表示装置(9)と地図データと制御回路(4)と入力手段とを備えたカーナビゲーション装置(2)であって、前記制御回路(4)は、請求項3に記載の前照灯制御装置(3)から送られた前記入力信号と操作信号をその時の自車位置と共に内部の記憶装置に記憶しておき、前記入力手段を介して指示された場合には、該記憶した情報を順次読み出して前照灯の配光パターンを算出し、算出した配光パターンと、読み出した自車位置と車体方位とを、前記地図データから読み出した自車位置を中心とする周辺地図に重ねて前記表示装置上に表示させるように構成されていることを特徴とするカーナビゲーション装置である。
【0014】
このようなカーナビゲーション装置によれば、走行を終えた後に記録した操作信号、入力信号、自車位置等を読み出して配光パターンの計算と結果の表示を何度でも実行させることができる。これによりユーザは、前照灯制御の制御結果としての配光パターンを容易に確認することができ、前照灯制御装置の制御性の善し悪しの判断、不具合の発見、不具合の再現を容易に行なうことができる。
【発明を実施するための最良の形態】
【0015】
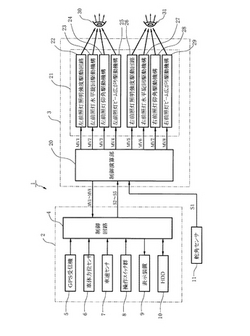
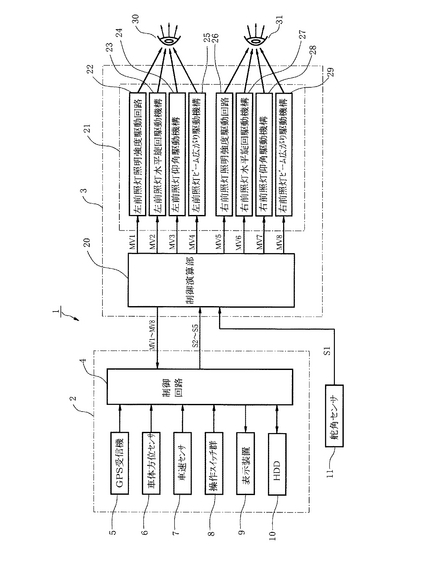
以下、図面を参照して本発明の実施の形態を説明する。図1は車両前照灯の配光パターン確認システムの全体構成を示したものである。本実施形態の車両前照灯の配光パターン確認システム1は、カーナビゲーション装置2と前照灯制御装置3とを備えて構成される。
カーナビゲーション装置2は、制御回路4、GPS受信機5、車体方位センサ6、車速センサ7、操作スイッチ群8、表示装置9、磁気ディスク装置(以下、HDDという。)10を備えて構成される。
【0016】
制御回路5は、カーナビゲーション装置2の動作全般を制御する機能を有するものでマイクロコンピュータを主体に構成されており、内部には図示しないCPU、RAM、ROM、I/Oインターフェース、それらを接続するバス、電源装置などを備える。
GPS受信機5は複数のGPS用人工衛星からの信号を受信して制御回路4に伝達するもので、その情報に基づいて制御回路4内で必要な演算処理が行なわれ車両の現在位置が算出される。車体方位センサ6は、地磁気センサ、振動ジャイロ等で構成され車体の方位を検出するものである。車速センサ7は車速を検出するためのもので、例えばトランスミッションの回転を電気信号に変換して車速を検出する。
【0017】
操作スイッチ群8は、制御回路4へのコマンドやデータ入力のための手段で、例えばカラー液晶ディスプレイ上に形成されたタッチスイッチやリモコンスイッチ等で構成される。表示装置9は、道路地図、車両の現在位置、案内経路等を表示するためのもので、例えばカラー液晶ディスプレイで構成される。
【0018】
HDD10内には、本カーナビゲーション装置2を動作させるための各種プログラムが予め格納されている。このプログラムには、後述する本発明の機能を発揮させるためのプログラムの他に一般的なカーナビゲーション機能を実行するためのプログラム、例えばGPS受信機5からの信号に基づいて現在位置を算出する機能、算出した現在位置を地図上に位置付けるマップマッチング処理機能、目的地や経由地の指定を受けて現在位置から目的地までの経路を探索する経路探索機能、その経路探索結果に応じた案内ルートを地図画面上に表示して案内する経路案内機能、VICS(Vehicle Information & Communication System)からの道路交通情報を受信して運転者に知らせる機能などを実行するためのプログラムが含まれる。
以上のような装置の他にもカーナビゲーション装置2には、車両の上下/前後方向の加速度を検出する加速度センサ、車体の傾斜角を検出する車体傾斜角センサ等が必要により取り付けられる。
【0019】
前照灯制御装置3は、車体前部の左右に取り付けられた前照灯を制御してその配光パターンである光ビームの形状、明るさ、照射方向を変化させるものである。前照灯制御装置3は、制御演算部20と操作部21により構成される。
【0020】
操作部21は、制御演算部20が出力する操作信号MV1〜MV8を入力指令信号として受けて左右の前照灯30、31を指令通りに操作する部分である。操作部21の構成は、制御対象である前照灯30、31のランプ構成、リフレクタ構成、駆動機構の構成によって様々な構成が存在する。本実施形態の操作部21は、左前照灯照明強度駆動回路22、左前照灯水平旋回駆動機構23、左前照灯仰角駆動機構24、左前照灯ビーム広がり駆動機構25と、右前照灯に対応する同様の駆動回路26、駆動機構27〜29とにより構成されている。
【0021】
左前照灯照明強度駆動回路22は、左前照灯30のランプに電力を供給する回路であり、操作信号MV1により指令された値の電力をランプに供給する。なお、ランプが複数存在する場合には、各々のランプに対応して複数の回路が設けられる。
左前照灯水平旋回駆動機構23は、左前照灯30により発せられる光ビームの水平旋回角度を制御する機構で、操作信号MV2により指令された方向に光ビームの水平旋回角度を調節する。この角度調節は旋回用モータを使用したサーボ機構によるフィードバック制御で行なわれる場合と、例えばパルスモータを使用したオープンループ制御で行なわれる場合とがある。何れの制御方式を採用した場合も、最終的な水平旋回角度は操作信号MV2により指令された角度に一致させられる。
【0022】
左前照灯仰角駆動機構24は、左前照灯30により発せられる光ビームの仰角を制御する機構で、操作信号MV3により指令された角度に光ビームの仰角を調節する。駆動機構は、左前照灯水平旋回駆動機構23と同じようにして構成される。
左前照灯ビーム広がり駆動機構25は、左前照灯30により発せられる光ビームの広がり(立体角)を制御する機構で、操作信号MV4により指令された広がりに光ビームの広がりを調節する。この光ビームの広がりは、ランプとその背面に設けられるリフレクタとの間隔を変化させることで調節される。間隔を狭くすると広がりは大きく、間隔を広げると広がりは小さくなる。間隔の調節は、ランプあるいはリフレクタを移動させる方式で行なってもよいが、リフレクタからの距離が異なる位置に複数のランプフィラメントを取り付け、通電するフィラメントを切り換える方式で行なうようにしてもよい。
【0023】
右前照灯用の駆動回路26、駆動機構27〜29も左前照灯用と同じように構成される。但し、左前照灯用と右前照灯用の各駆動回路、駆動機構は別々の操作信号によって制御される。
制御演算部20は、上述した操作部21内の駆動回路22、26、駆動機構23〜25、27〜29に対してそれぞれの操作信号MV1〜MV8を生成して与えるものである。この操作信号MV1〜MV8は、左前照灯30と右前照灯31とにより形成される総合的な配光パターンが所定の目標配光パターンと一致させるように生成される。この目標配光パターンは、制御演算部20に入力される入力信号に基づいて制御演算部20内で決定され、その決定した目標配光パターンに従って操作信号MV1〜MV8が演算により生成される。
【0024】
前照灯制御装置3の制御演算部20への入力信号は、本実施形態の場合、舵角センサ11とカーナビゲーション装置2の制御回路4とから与えられる。舵角センサ11は、ステアリングホイールの回転角度から車両の舵角(旋回角度)を検出するセンサである。舵角信号は、交差点などの曲路走行をする場合に進行方向を視認しやすいように光ビームを曲がろうとする方向に旋回させるために参照される。なお、この舵角センサ11からの信号は、制御回路4を経由して制御演算部20に入力するようにしてもよい。
【0025】
制御回路4から入力される信号としては、車体方位センサ6で検出された車体方位、車速センサ7で検出された車速がある。車速は、車速により運転者の注視点が変化することから配光パターンをそれに合った形に変化させるために参照される。制御回路4からは、走行中道路の方向、曲がり具合、勾配、道路幅等のデータが制御演算部20に入力される。これらの入力情報は、GPS受信機5の信号を基に算出された自車位置に基づいて地図データから読み出される。道路の方向、曲がり具合は、車体方位センサ6で検出された車体方位と共に光ビームの方向、広がり等を決定するために使用される。
【0026】
制御回路4からは、更にカーナビゲーション装置2の経路案内機能により提供される右折、左折交差点が前方○○mに迫っているとの案内情報も制御演算回路20に入力される。この情報は、交差点直前、あるいは交差点内で光ビームの方向を運転し易い方向に制御するために参照される。
【0027】
制御演算部20は、このような入力信号に基づいてまず最適な目標配光パターンを決定し、その決定した目標配光パターンを実現するための操作信号MV1〜MV8を演算により算出する。目標配光パターンは中間的なもので、外部に出力されるものではない。最終的に外部に出力されのは操作信号MV1〜MV8のみである。操作信号MV1〜MV8は、目標配光パターンにより決まり、その目標配光パターンは制御演算部20への入力信号により決まる。従って、操作信号MV1〜MV8は、結局、制御演算部20への入力信号によって決まる。
【0028】
舵角信号をS1、車体方位信号をS2、車速信号をS3、上述した走行中道路の前方状況に関する情報をS4、上述した経路案内機能からの情報をS5と表現することとすると、操作信号MV1〜MV8は次にように表わすことができる。
MV1=F1(S1,S2,S3,S4,S5,C) (1)式
MV2=F2(S1,S2,S3,S4,S5,C) (2)式
MV3=F3(S1,S2,S3,S4,S5,C) (3)式
MV4=F4(S1,S2,S3,S4,S5,C) (4)式
MV5=F5(S1,S2,S3,S4,S5,C) (5)式
MV6=F6(S1,S2,S3,S4,S5,C) (6)式
MV7=F7(S1,S2,S3,S4,S5,C) (7)式
MV8=F8(S1,S2,S3,S4,S5,C) (8)式
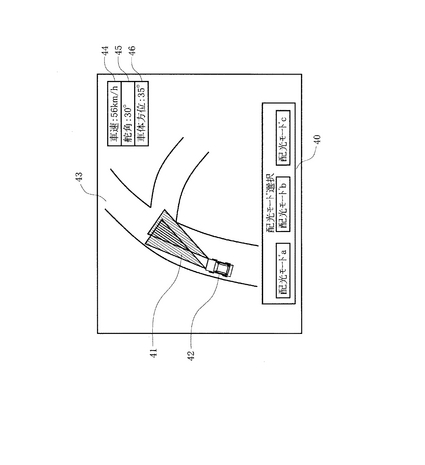
ここで、F1〜F8は、S1、S2、S3、S4、S5、Cを変数に持つ関数を表わしている。変数Cは、ユーザにより選択された配光モード選択信号である。配光モード選択は、表示装置9上に表示される後述する図2の画面の下部に設けた配光モード選択スイッチ40により選択される。この配光モード選択スイッチ40は、照明のON/OFF、周辺の暗さ加減等を考慮して選択されるスイッチである。入力信号S1、S2、S3、S4、S5の値が同じであっても、配光モード選択信号Cの情報により操作信号MV1〜MV8の値は異なったものとなる。また、関数F1〜F8は、左右前照灯30、31の内部構造、路面から取り付け位置までの高さ、左右前照灯間の間隔等によって異なり、車両の型式毎に決まる関数である。
【0029】
(1)〜(8)式によって算出された操作信号MV1〜MV8は、入力指令信号として操作部21に与えられる。操作部21内の照明強度駆動回路22、26、水平旋回駆動機構23、27、仰角駆動機構24、28、ビーム広がり駆動機構25、29は、与えられた操作信号MV1〜MV8に従ってランプの照明強度、光ビーム方向、光ビーム広がりを制御する。それらの制御の結果としての左右前照灯30、31による総合的な配光パターンは、操作信号MV1〜MV8の値によって一義的に決まる。
【0030】
従来の車両では、制御結果としての実際の配光パターンをユーザが確認することは難しかった。この問題を解決するため、本実施形態のシステムではカーナビゲーション装置2内で配光パターンを演算で求める。即ち、操作部21により操作される左右前照灯30、31によって形成される配光パターンをシミュレーションして演算で求め、その結果を表示装置9上に二次元又は三次元画像によって分かり易く表示することを行なう。そのシミュレーションを行なうため、前照灯制御装置3の制御演算部20は、入力変数S1〜S5、Cの値と、(1)〜(8)式による演算結果である操作信号MV1〜MV8の値を、所定の周期でカーナビゲーション装置2の制御回路4に送信する。
【0031】
カーナビゲーション装置2の制御回路4は、送信された入力変数S1〜S5、Cの値と操作信号MV1〜MV8の値をHDD10内に記録する。それと同時にその時の自車位置の情報も記録しておく。そして、それらの値に基づいてその時点の配光パターンを演算で求め、その結果を表示装置9上に車両位置、車体方位、周辺地図と共に表示する。
前述したように配光パターンは、操作信号MV1〜MV8の値によって一義的に決定される。従って、演算で求められる配光パターンも操作信号MV1〜MV8が判明すれば一義的に算出される。即ち、配光パターンPATは次のように表現できる。
PAT=Y(MV1、MV2、MV3、MV4、MV5、MV6、MV7、MV8)
(9)式
ここでYは、変数MV1〜MV8用いた配光パターンのシミュレーションモデルを表わし、PATはそのシミュレーションによる結果としての配光パターンを表わす。算出される配光パターンPATは三次元情報である。
【0032】
図2は、このようにして求められた配光パターンPATから路面上の照射領域41を算出して表示装置9上に表示した例を示したものである。照射領域41は、車両42の位置、車体方位と共に周辺の地図43に重ねて表示される。この場合、車速、舵角、車体方位も図2内の枠44〜46内に示すように画面上に数字で表示させると分かり易い。また、このように路面上の照射領域41を平面的に表示する以外に、光ビームの上下方向の仰角を確認するために車両の横方向から見た配光パターンを表示させてもよい。また、配光パターンを三次元的に画面に表示させてもよい。
【0033】
また、このような配光パターンの演算は走行中にリアルタイムで行なって結果を直ちに表示してもよいし、HDD10内に記録した内容に基づいて走行後に実行させるようにしてもよい。
【0034】
このように、本発明の車両前照灯の配光パターン確認システム1によれば、前照灯制御装置3の操作部21に与えられる操作信号MV1〜MV8に基づいて配光パターンがシミュレーションされ、その計算結果が自車位置、車体方位、車速、舵角等と共に地図上に表示される。このためユーザは、前照灯制御の制御結果としての配光パターンを容易に画面上で確認することができ、前照灯制御装置の制御性の善し悪しの判断、不具合の発見、不具合状況の再現を容易に行なうことができる効果が得られる。
【0035】
なお、特許請求の範囲に記載した自車位置検出手段は、上記実施形態ではGPS受信機5と制御回路4及びGPS受信機5からの信号に基づいて制御回路4にて自車位置を算出するプログラムにより実現されている。また車体方位検出手段は車体方位センサ6により、入力手段は操作スイッチ群8により実現されている。
【図面の簡単な説明】
【0036】
【図1】車両前照灯の配光パターン確認システムの全体構成を示すブロック図である。
【図2】計算結果である配光パターンの表示例である。
【符号の説明】
【0037】
図面中、1は車両前照灯の配光パターン確認システム、2はカーナビゲーション装置、3は前照灯制御装置、4は制御回路、5はGPS受信機、6は車体方位センサ、7は車速センサ、8は操作スイッチ群、9は表示装置、10はHDD、20は制御演算部、21は操作部、30は左前照灯、31は右前照灯、MV1〜MV8は操作信号を示す。
【技術分野】
【0001】
本発明は、前照灯制御装置によって制御される車両前照灯の配光パターンを確認する技術に関する。
【背景技術】
【0002】
近年における車両の前照灯は、快適な運転を求めるユーザの要望に応えて様々な工夫が施され、その構造と制御は益々複雑化してきている。古くは光ビーム照射方向が固定されていたが、交差点などの曲路走行時に進行方向路面を十分に照射できないことからステアリングの舵角を検出し、ランプの光軸を曲がろうとする方向に移動制御する技術が開発された(例えば、文献1参照)。しかし、舵角のみで光軸の水平方向を制御するのでは、カーブに進入する前のステアリングが操作されない段階では曲がろうとする方向が照射されない。この問題を解決するために、カーナビゲーション装置の有する地図データ、経路案内機能を利用して前照灯の光軸制御を行なう技術が提案されている(例えば、特許文献2、3参照)。
【0003】
更には、このような水平方向の制御の他に、すれ違い車両にグレア(幻惑光)を与えないためのハイビーム、ロービームと呼ばれる光ビームの仰角制御も行なわれる。また、車速により運転者の注視点が変化することに注目し、車速を考慮してビームの方向と広がりの双方を制御する技術も提案されている(例えば、特許文献4参照)。
しかしながら、こうした複雑な制御の結果としての前照灯の配光パターンや照射範囲は走行中にリアルタイムで変化するものであるため、運転しているユーザにはその配光パターン、照射範囲、配光制御の善し悪し等を確認しにくいという問題がある。また、これに付随して制御が複雑すぎるためユーザには制御内容が判りにくい、不具合の発見が困難、不具合状況の再現が困難等の問題も指摘されている。
【特許文献1】特開昭62−77249号公報
【特許文献2】特開平2−296550号公報
【特許文献3】特開2002−193030号公報
【特許文献4】特開2003−123514号公報
【特許文献5】特開平9−203691号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明は、このような従来技術の問題点を解決するためになされたもので、その課題は、複雑な前照灯制御の配光パターン、照射領域、制御の善し悪し等の確認をユーザが容易に行なうことができるようにし、それにより不具合点の発見、不具合程度の把握等を容易にすることにある。
【課題を解決するための手段】
【0005】
請求項1に記載の発明は、カーナビゲーション装置(2)と前照灯制御装置(3)とからなる車両前照灯の配光パターン確認システム(1)であって、前記前照灯制御装置は制御演算部(20)と操作部(21)とを備え、前記制御演算部は前照灯制御装置への入力信号に基づいて配光パターンを決め、該配光パターンを実現する操作信号を演算して前記操作部に与えると同時にその時の前記入力信号と操作信号を前記カーナビゲーション装置に送信し、前記操作部は前記操作信号に従って前照灯を操作するように構成されており、 前記カーナビゲーション装置は、自車位置検出手段と車体方位検出手段と表示装置(9)と地図データと制御回路(4)とを備え、該制御回路は前記前照灯制御装置から送られた前記入力信号と操作信号とに基づいて前照灯の配光パターンを算出し、算出した配光パターンと、前記自車位置検出手段で検出した自車位置と、前記車体方位検出手段で検出した車体方位とを、前記地図データから読み出した自車位置を中心とする周辺地図に重ねて前記表示装置上に表示させるように構成されていることを特徴とする車両前照灯の配光パターン確認システムである。
【0006】
本構成のシステムによれば、前照灯制御装置(3)の操作部(21)に与えられる操作信号(MV1〜MV8)に基づいて配光パターンが算出され、その結果が自車位置、車体方位等と共に地図上に表示される。このためユーザは、前照灯制御の制御結果としての配光パターンを容易に確認することができ、前照灯制御装置の制御性の善し悪しの判断、不具合の発見をリアルタイムで容易に行なうことができるようになる。
【0007】
また、請求項2に記載の発明は、カーナビゲーション装置(2)と前照灯制御装置(3)とからなる車両前照灯の配光パターン確認システム(1)であって、前記前照灯制御装置は制御演算部(20)と操作部(21)とを備え、前記制御演算部は前照灯制御装置への入力信号に基づいて配光パターンを決め、該配光パターンを実現する操作信号を演算して前記操作部に与えると同時にその時の前記入力信号と操作信号を前記カーナビゲーション装置に送信し、前記操作部は前記操作信号に従って前照灯を操作するように構成されており、
前記カーナビゲーション装置は、自車位置検出手段と車体方位検出手段と表示装置(9)と地図データと制御回路(4)と入力手段とを備え、前記制御回路(4)は、前記前照灯制御装置から送られた前記入力信号と操作信号をその時の自車位置と共に内部の記憶装置に記憶しておき、前記入力手段を介して指示された場合には、該記憶した情報を順次読み出して前照灯の配光パターンを算出し、算出した配光パターンと、読み出した自車位置と車体方位とを、前記地図データから読み出した自車位置を中心とする周辺地図に重ねて前記表示装置上に表示させるように構成されていることを特徴とする車両前照灯の配光パターン確認システムである。
【0008】
このように制御演算部(20)への入力信号とその出力である操作信号(MV1〜MV8)とをその時の自車位置と一緒に記録しておけば、走行を終えた後にそれらの値を読み出して配光パターンの計算と表示を何度でも実行させることができる。これによりユーザは、前照灯制御の制御結果としての配光パターンを容易に確認することができ、前照灯制御装置の制御性の善し悪しの判断、不具合の発見、不具合の再現を容易に行なうことができる。
【0009】
また、請求項3に記載の発明は、制御演算部(20)と操作部(21)とを備えた車両の前照灯制御装置(3)であって、前記制御演算部は前照灯制御装置への入力信号に基づいて配光パターンを決め、該配光パターンを実現する操作信号を演算して前記操作部に与えると同時にその時の前記入力信号と操作信号を外部の装置に送信し、前記操作部は前記操作信号に従って前照灯を操作するように構成されていることを特徴とする車両の前照灯制御装置である。
【0010】
このように制御演算部(20)の入力信号と、その出力信号であり操作部(21)にとっては入力信号である操作信号(MV1〜MV8)とを、時々刻々カーナビゲーション装置などの外部の装置に送信するようにすれば、外部の装置側にてそれらの信号に基づいて時々刻々変化する配光パターンを計算して表示することが可能になる。
【0011】
また、請求項4に記載の発明は、自車位置検出手段と車体方向検出装置と表示装置(9)と地図データと制御回路(4)とを備えたカーナビゲーション装置(2)であって、前記制御回路(4)は、請求項3に記載の前照灯制御装置(3)から送られた前記入力信号と操作信号とに基づいて前照灯の配光パターンを算出し、算出した配光パターンと、前記自車位置検出手段で検出した自車位置と、前記車体方位検出手段で検出した車体方位とを、前記地図データから読み出した自車位置を中心とする周辺地図に重ねて前記表示装置上に表示させるように構成されていることを特徴とするカーナビゲーション装置である。
【0012】
このようなカーナビゲーション装置によれば、前照灯制御装置(3)から送られた操作信号に基づいて実際の配光パターンの計算と結果の表示を行なうことが可能となる。そしてその結果を自車位置、車体方位等と共に地図上に重ねて表示することにより、ユーザは配光パターンをリアルタイムで容易に確認できるようになる。
【0013】
また、請求項5に記載の発明は、自車位置検出手段と車体方向検出装置と表示装置(9)と地図データと制御回路(4)と入力手段とを備えたカーナビゲーション装置(2)であって、前記制御回路(4)は、請求項3に記載の前照灯制御装置(3)から送られた前記入力信号と操作信号をその時の自車位置と共に内部の記憶装置に記憶しておき、前記入力手段を介して指示された場合には、該記憶した情報を順次読み出して前照灯の配光パターンを算出し、算出した配光パターンと、読み出した自車位置と車体方位とを、前記地図データから読み出した自車位置を中心とする周辺地図に重ねて前記表示装置上に表示させるように構成されていることを特徴とするカーナビゲーション装置である。
【0014】
このようなカーナビゲーション装置によれば、走行を終えた後に記録した操作信号、入力信号、自車位置等を読み出して配光パターンの計算と結果の表示を何度でも実行させることができる。これによりユーザは、前照灯制御の制御結果としての配光パターンを容易に確認することができ、前照灯制御装置の制御性の善し悪しの判断、不具合の発見、不具合の再現を容易に行なうことができる。
【発明を実施するための最良の形態】
【0015】
以下、図面を参照して本発明の実施の形態を説明する。図1は車両前照灯の配光パターン確認システムの全体構成を示したものである。本実施形態の車両前照灯の配光パターン確認システム1は、カーナビゲーション装置2と前照灯制御装置3とを備えて構成される。
カーナビゲーション装置2は、制御回路4、GPS受信機5、車体方位センサ6、車速センサ7、操作スイッチ群8、表示装置9、磁気ディスク装置(以下、HDDという。)10を備えて構成される。
【0016】
制御回路5は、カーナビゲーション装置2の動作全般を制御する機能を有するものでマイクロコンピュータを主体に構成されており、内部には図示しないCPU、RAM、ROM、I/Oインターフェース、それらを接続するバス、電源装置などを備える。
GPS受信機5は複数のGPS用人工衛星からの信号を受信して制御回路4に伝達するもので、その情報に基づいて制御回路4内で必要な演算処理が行なわれ車両の現在位置が算出される。車体方位センサ6は、地磁気センサ、振動ジャイロ等で構成され車体の方位を検出するものである。車速センサ7は車速を検出するためのもので、例えばトランスミッションの回転を電気信号に変換して車速を検出する。
【0017】
操作スイッチ群8は、制御回路4へのコマンドやデータ入力のための手段で、例えばカラー液晶ディスプレイ上に形成されたタッチスイッチやリモコンスイッチ等で構成される。表示装置9は、道路地図、車両の現在位置、案内経路等を表示するためのもので、例えばカラー液晶ディスプレイで構成される。
【0018】
HDD10内には、本カーナビゲーション装置2を動作させるための各種プログラムが予め格納されている。このプログラムには、後述する本発明の機能を発揮させるためのプログラムの他に一般的なカーナビゲーション機能を実行するためのプログラム、例えばGPS受信機5からの信号に基づいて現在位置を算出する機能、算出した現在位置を地図上に位置付けるマップマッチング処理機能、目的地や経由地の指定を受けて現在位置から目的地までの経路を探索する経路探索機能、その経路探索結果に応じた案内ルートを地図画面上に表示して案内する経路案内機能、VICS(Vehicle Information & Communication System)からの道路交通情報を受信して運転者に知らせる機能などを実行するためのプログラムが含まれる。
以上のような装置の他にもカーナビゲーション装置2には、車両の上下/前後方向の加速度を検出する加速度センサ、車体の傾斜角を検出する車体傾斜角センサ等が必要により取り付けられる。
【0019】
前照灯制御装置3は、車体前部の左右に取り付けられた前照灯を制御してその配光パターンである光ビームの形状、明るさ、照射方向を変化させるものである。前照灯制御装置3は、制御演算部20と操作部21により構成される。
【0020】
操作部21は、制御演算部20が出力する操作信号MV1〜MV8を入力指令信号として受けて左右の前照灯30、31を指令通りに操作する部分である。操作部21の構成は、制御対象である前照灯30、31のランプ構成、リフレクタ構成、駆動機構の構成によって様々な構成が存在する。本実施形態の操作部21は、左前照灯照明強度駆動回路22、左前照灯水平旋回駆動機構23、左前照灯仰角駆動機構24、左前照灯ビーム広がり駆動機構25と、右前照灯に対応する同様の駆動回路26、駆動機構27〜29とにより構成されている。
【0021】
左前照灯照明強度駆動回路22は、左前照灯30のランプに電力を供給する回路であり、操作信号MV1により指令された値の電力をランプに供給する。なお、ランプが複数存在する場合には、各々のランプに対応して複数の回路が設けられる。
左前照灯水平旋回駆動機構23は、左前照灯30により発せられる光ビームの水平旋回角度を制御する機構で、操作信号MV2により指令された方向に光ビームの水平旋回角度を調節する。この角度調節は旋回用モータを使用したサーボ機構によるフィードバック制御で行なわれる場合と、例えばパルスモータを使用したオープンループ制御で行なわれる場合とがある。何れの制御方式を採用した場合も、最終的な水平旋回角度は操作信号MV2により指令された角度に一致させられる。
【0022】
左前照灯仰角駆動機構24は、左前照灯30により発せられる光ビームの仰角を制御する機構で、操作信号MV3により指令された角度に光ビームの仰角を調節する。駆動機構は、左前照灯水平旋回駆動機構23と同じようにして構成される。
左前照灯ビーム広がり駆動機構25は、左前照灯30により発せられる光ビームの広がり(立体角)を制御する機構で、操作信号MV4により指令された広がりに光ビームの広がりを調節する。この光ビームの広がりは、ランプとその背面に設けられるリフレクタとの間隔を変化させることで調節される。間隔を狭くすると広がりは大きく、間隔を広げると広がりは小さくなる。間隔の調節は、ランプあるいはリフレクタを移動させる方式で行なってもよいが、リフレクタからの距離が異なる位置に複数のランプフィラメントを取り付け、通電するフィラメントを切り換える方式で行なうようにしてもよい。
【0023】
右前照灯用の駆動回路26、駆動機構27〜29も左前照灯用と同じように構成される。但し、左前照灯用と右前照灯用の各駆動回路、駆動機構は別々の操作信号によって制御される。
制御演算部20は、上述した操作部21内の駆動回路22、26、駆動機構23〜25、27〜29に対してそれぞれの操作信号MV1〜MV8を生成して与えるものである。この操作信号MV1〜MV8は、左前照灯30と右前照灯31とにより形成される総合的な配光パターンが所定の目標配光パターンと一致させるように生成される。この目標配光パターンは、制御演算部20に入力される入力信号に基づいて制御演算部20内で決定され、その決定した目標配光パターンに従って操作信号MV1〜MV8が演算により生成される。
【0024】
前照灯制御装置3の制御演算部20への入力信号は、本実施形態の場合、舵角センサ11とカーナビゲーション装置2の制御回路4とから与えられる。舵角センサ11は、ステアリングホイールの回転角度から車両の舵角(旋回角度)を検出するセンサである。舵角信号は、交差点などの曲路走行をする場合に進行方向を視認しやすいように光ビームを曲がろうとする方向に旋回させるために参照される。なお、この舵角センサ11からの信号は、制御回路4を経由して制御演算部20に入力するようにしてもよい。
【0025】
制御回路4から入力される信号としては、車体方位センサ6で検出された車体方位、車速センサ7で検出された車速がある。車速は、車速により運転者の注視点が変化することから配光パターンをそれに合った形に変化させるために参照される。制御回路4からは、走行中道路の方向、曲がり具合、勾配、道路幅等のデータが制御演算部20に入力される。これらの入力情報は、GPS受信機5の信号を基に算出された自車位置に基づいて地図データから読み出される。道路の方向、曲がり具合は、車体方位センサ6で検出された車体方位と共に光ビームの方向、広がり等を決定するために使用される。
【0026】
制御回路4からは、更にカーナビゲーション装置2の経路案内機能により提供される右折、左折交差点が前方○○mに迫っているとの案内情報も制御演算回路20に入力される。この情報は、交差点直前、あるいは交差点内で光ビームの方向を運転し易い方向に制御するために参照される。
【0027】
制御演算部20は、このような入力信号に基づいてまず最適な目標配光パターンを決定し、その決定した目標配光パターンを実現するための操作信号MV1〜MV8を演算により算出する。目標配光パターンは中間的なもので、外部に出力されるものではない。最終的に外部に出力されのは操作信号MV1〜MV8のみである。操作信号MV1〜MV8は、目標配光パターンにより決まり、その目標配光パターンは制御演算部20への入力信号により決まる。従って、操作信号MV1〜MV8は、結局、制御演算部20への入力信号によって決まる。
【0028】
舵角信号をS1、車体方位信号をS2、車速信号をS3、上述した走行中道路の前方状況に関する情報をS4、上述した経路案内機能からの情報をS5と表現することとすると、操作信号MV1〜MV8は次にように表わすことができる。
MV1=F1(S1,S2,S3,S4,S5,C) (1)式
MV2=F2(S1,S2,S3,S4,S5,C) (2)式
MV3=F3(S1,S2,S3,S4,S5,C) (3)式
MV4=F4(S1,S2,S3,S4,S5,C) (4)式
MV5=F5(S1,S2,S3,S4,S5,C) (5)式
MV6=F6(S1,S2,S3,S4,S5,C) (6)式
MV7=F7(S1,S2,S3,S4,S5,C) (7)式
MV8=F8(S1,S2,S3,S4,S5,C) (8)式
ここで、F1〜F8は、S1、S2、S3、S4、S5、Cを変数に持つ関数を表わしている。変数Cは、ユーザにより選択された配光モード選択信号である。配光モード選択は、表示装置9上に表示される後述する図2の画面の下部に設けた配光モード選択スイッチ40により選択される。この配光モード選択スイッチ40は、照明のON/OFF、周辺の暗さ加減等を考慮して選択されるスイッチである。入力信号S1、S2、S3、S4、S5の値が同じであっても、配光モード選択信号Cの情報により操作信号MV1〜MV8の値は異なったものとなる。また、関数F1〜F8は、左右前照灯30、31の内部構造、路面から取り付け位置までの高さ、左右前照灯間の間隔等によって異なり、車両の型式毎に決まる関数である。
【0029】
(1)〜(8)式によって算出された操作信号MV1〜MV8は、入力指令信号として操作部21に与えられる。操作部21内の照明強度駆動回路22、26、水平旋回駆動機構23、27、仰角駆動機構24、28、ビーム広がり駆動機構25、29は、与えられた操作信号MV1〜MV8に従ってランプの照明強度、光ビーム方向、光ビーム広がりを制御する。それらの制御の結果としての左右前照灯30、31による総合的な配光パターンは、操作信号MV1〜MV8の値によって一義的に決まる。
【0030】
従来の車両では、制御結果としての実際の配光パターンをユーザが確認することは難しかった。この問題を解決するため、本実施形態のシステムではカーナビゲーション装置2内で配光パターンを演算で求める。即ち、操作部21により操作される左右前照灯30、31によって形成される配光パターンをシミュレーションして演算で求め、その結果を表示装置9上に二次元又は三次元画像によって分かり易く表示することを行なう。そのシミュレーションを行なうため、前照灯制御装置3の制御演算部20は、入力変数S1〜S5、Cの値と、(1)〜(8)式による演算結果である操作信号MV1〜MV8の値を、所定の周期でカーナビゲーション装置2の制御回路4に送信する。
【0031】
カーナビゲーション装置2の制御回路4は、送信された入力変数S1〜S5、Cの値と操作信号MV1〜MV8の値をHDD10内に記録する。それと同時にその時の自車位置の情報も記録しておく。そして、それらの値に基づいてその時点の配光パターンを演算で求め、その結果を表示装置9上に車両位置、車体方位、周辺地図と共に表示する。
前述したように配光パターンは、操作信号MV1〜MV8の値によって一義的に決定される。従って、演算で求められる配光パターンも操作信号MV1〜MV8が判明すれば一義的に算出される。即ち、配光パターンPATは次のように表現できる。
PAT=Y(MV1、MV2、MV3、MV4、MV5、MV6、MV7、MV8)
(9)式
ここでYは、変数MV1〜MV8用いた配光パターンのシミュレーションモデルを表わし、PATはそのシミュレーションによる結果としての配光パターンを表わす。算出される配光パターンPATは三次元情報である。
【0032】
図2は、このようにして求められた配光パターンPATから路面上の照射領域41を算出して表示装置9上に表示した例を示したものである。照射領域41は、車両42の位置、車体方位と共に周辺の地図43に重ねて表示される。この場合、車速、舵角、車体方位も図2内の枠44〜46内に示すように画面上に数字で表示させると分かり易い。また、このように路面上の照射領域41を平面的に表示する以外に、光ビームの上下方向の仰角を確認するために車両の横方向から見た配光パターンを表示させてもよい。また、配光パターンを三次元的に画面に表示させてもよい。
【0033】
また、このような配光パターンの演算は走行中にリアルタイムで行なって結果を直ちに表示してもよいし、HDD10内に記録した内容に基づいて走行後に実行させるようにしてもよい。
【0034】
このように、本発明の車両前照灯の配光パターン確認システム1によれば、前照灯制御装置3の操作部21に与えられる操作信号MV1〜MV8に基づいて配光パターンがシミュレーションされ、その計算結果が自車位置、車体方位、車速、舵角等と共に地図上に表示される。このためユーザは、前照灯制御の制御結果としての配光パターンを容易に画面上で確認することができ、前照灯制御装置の制御性の善し悪しの判断、不具合の発見、不具合状況の再現を容易に行なうことができる効果が得られる。
【0035】
なお、特許請求の範囲に記載した自車位置検出手段は、上記実施形態ではGPS受信機5と制御回路4及びGPS受信機5からの信号に基づいて制御回路4にて自車位置を算出するプログラムにより実現されている。また車体方位検出手段は車体方位センサ6により、入力手段は操作スイッチ群8により実現されている。
【図面の簡単な説明】
【0036】
【図1】車両前照灯の配光パターン確認システムの全体構成を示すブロック図である。
【図2】計算結果である配光パターンの表示例である。
【符号の説明】
【0037】
図面中、1は車両前照灯の配光パターン確認システム、2はカーナビゲーション装置、3は前照灯制御装置、4は制御回路、5はGPS受信機、6は車体方位センサ、7は車速センサ、8は操作スイッチ群、9は表示装置、10はHDD、20は制御演算部、21は操作部、30は左前照灯、31は右前照灯、MV1〜MV8は操作信号を示す。
【特許請求の範囲】
【請求項1】
カーナビゲーション装置(2)と前照灯制御装置(3)とからなる車両前照灯の配光パターン確認システム(1)であって、
前記前照灯制御装置は制御演算部(20)と操作部(21)とを備え、前記制御演算部は前照灯制御装置への入力信号に基づいて配光パターンを決め、該配光パターンを実現する操作信号を演算して前記操作部に与えると同時にその時の前記入力信号と操作信号を前記カーナビゲーション装置に送信し、前記操作部は前記操作信号に従って前照灯を操作するように構成されており、
前記カーナビゲーション装置は、自車位置検出手段と車体方位検出手段と表示装置(9)と地図データと制御回路(4)とを備え、該制御回路は前記前照灯制御装置から送られた前記入力信号と操作信号とに基づいて前照灯の配光パターンを算出し、算出した配光パターンと、前記自車位置検出手段で検出した自車位置と、前記車体方位検出手段で検出した車体方位とを、前記地図データから読み出した自車位置を中心とする周辺地図に重ねて前記表示装置上に表示させるように構成されていることを特徴とする車両前照灯の配光パターン確認システム。
【請求項2】
カーナビゲーション装置(2)と前照灯制御装置(3)とからなる車両前照灯の配光パターン確認システム(1)であって、
前記前照灯制御装置は制御演算部(20)と操作部(21)とを備え、前記制御演算部は前照灯制御装置への入力信号に基づいて配光パターンを決め、該配光パターンを実現する操作信号を演算して前記操作部に与えると同時にその時の前記入力信号と操作信号を前記カーナビゲーション装置に送信し、前記操作部は前記操作信号に従って前照灯を操作するように構成されており、
前記カーナビゲーション装置は、自車位置検出手段と車体方位検出手段と表示装置(9)と地図データと制御回路(4)と入力手段とを備え、前記制御回路(4)は、前記前照灯制御装置から送られた前記入力信号と操作信号をその時の自車位置と共に内部の記憶装置に記憶しておき、前記入力手段を介して指示された場合には、該記憶した情報を順次読み出して前照灯の配光パターンを算出し、算出した配光パターンと、読み出した自車位置と車体方位とを、前記地図データから読み出した自車位置を中心とする周辺地図に重ねて前記表示装置上に表示させるように構成されていることを特徴とする車両前照灯の配光パターン確認システム。
【請求項3】
制御演算部(20)と操作部(21)とを備えた車両の前照灯制御装置(3)であって、前記制御演算部は前照灯制御装置への入力信号に基づいて配光パターンを決め、該配光パターンを実現する操作信号を演算して前記操作部に与えると同時にその時の前記入力信号と操作信号を外部の装置に送信し、前記操作部は前記操作信号に従って前照灯を操作するように構成されていることを特徴とする車両の前照灯制御装置。
【請求項4】
自車位置検出手段と車体方向検出装置と表示装置(9)と地図データと制御回路(4)とを備えたカーナビゲーション装置(2)であって、
前記制御回路(4)は、請求項3に記載の前照灯制御装置(3)から送られた前記入力信号と操作信号とに基づいて前照灯の配光パターンを算出し、算出した配光パターンと、前記自車位置検出手段で検出した自車位置と、前記車体方位検出手段で検出した車体方位とを、前記地図データから読み出した自車位置を中心とする周辺地図に重ねて前記表示装置上に表示させるように構成されていることを特徴とするカーナビゲーション装置。
【請求項5】
自車位置検出手段と車体方向検出装置と表示装置(9)と地図データと制御回路(4)と入力手段とを備えたカーナビゲーション装置(2)であって、
前記制御回路(4)は、請求項3に記載の前照灯制御装置(3)から送られた前記入力信号と操作信号をその時の自車位置と共に内部の記憶装置に記憶しておき、前記入力手段を介して指示された場合には、該記憶した情報を順次読み出して前照灯の配光パターンを算出し、算出した配光パターンと、読み出した自車位置と車体方位とを、前記地図データから読み出した自車位置を中心とする周辺地図に重ねて前記表示装置上に表示させるように構成されていることを特徴とするカーナビゲーション装置。
【請求項1】
カーナビゲーション装置(2)と前照灯制御装置(3)とからなる車両前照灯の配光パターン確認システム(1)であって、
前記前照灯制御装置は制御演算部(20)と操作部(21)とを備え、前記制御演算部は前照灯制御装置への入力信号に基づいて配光パターンを決め、該配光パターンを実現する操作信号を演算して前記操作部に与えると同時にその時の前記入力信号と操作信号を前記カーナビゲーション装置に送信し、前記操作部は前記操作信号に従って前照灯を操作するように構成されており、
前記カーナビゲーション装置は、自車位置検出手段と車体方位検出手段と表示装置(9)と地図データと制御回路(4)とを備え、該制御回路は前記前照灯制御装置から送られた前記入力信号と操作信号とに基づいて前照灯の配光パターンを算出し、算出した配光パターンと、前記自車位置検出手段で検出した自車位置と、前記車体方位検出手段で検出した車体方位とを、前記地図データから読み出した自車位置を中心とする周辺地図に重ねて前記表示装置上に表示させるように構成されていることを特徴とする車両前照灯の配光パターン確認システム。
【請求項2】
カーナビゲーション装置(2)と前照灯制御装置(3)とからなる車両前照灯の配光パターン確認システム(1)であって、
前記前照灯制御装置は制御演算部(20)と操作部(21)とを備え、前記制御演算部は前照灯制御装置への入力信号に基づいて配光パターンを決め、該配光パターンを実現する操作信号を演算して前記操作部に与えると同時にその時の前記入力信号と操作信号を前記カーナビゲーション装置に送信し、前記操作部は前記操作信号に従って前照灯を操作するように構成されており、
前記カーナビゲーション装置は、自車位置検出手段と車体方位検出手段と表示装置(9)と地図データと制御回路(4)と入力手段とを備え、前記制御回路(4)は、前記前照灯制御装置から送られた前記入力信号と操作信号をその時の自車位置と共に内部の記憶装置に記憶しておき、前記入力手段を介して指示された場合には、該記憶した情報を順次読み出して前照灯の配光パターンを算出し、算出した配光パターンと、読み出した自車位置と車体方位とを、前記地図データから読み出した自車位置を中心とする周辺地図に重ねて前記表示装置上に表示させるように構成されていることを特徴とする車両前照灯の配光パターン確認システム。
【請求項3】
制御演算部(20)と操作部(21)とを備えた車両の前照灯制御装置(3)であって、前記制御演算部は前照灯制御装置への入力信号に基づいて配光パターンを決め、該配光パターンを実現する操作信号を演算して前記操作部に与えると同時にその時の前記入力信号と操作信号を外部の装置に送信し、前記操作部は前記操作信号に従って前照灯を操作するように構成されていることを特徴とする車両の前照灯制御装置。
【請求項4】
自車位置検出手段と車体方向検出装置と表示装置(9)と地図データと制御回路(4)とを備えたカーナビゲーション装置(2)であって、
前記制御回路(4)は、請求項3に記載の前照灯制御装置(3)から送られた前記入力信号と操作信号とに基づいて前照灯の配光パターンを算出し、算出した配光パターンと、前記自車位置検出手段で検出した自車位置と、前記車体方位検出手段で検出した車体方位とを、前記地図データから読み出した自車位置を中心とする周辺地図に重ねて前記表示装置上に表示させるように構成されていることを特徴とするカーナビゲーション装置。
【請求項5】
自車位置検出手段と車体方向検出装置と表示装置(9)と地図データと制御回路(4)と入力手段とを備えたカーナビゲーション装置(2)であって、
前記制御回路(4)は、請求項3に記載の前照灯制御装置(3)から送られた前記入力信号と操作信号をその時の自車位置と共に内部の記憶装置に記憶しておき、前記入力手段を介して指示された場合には、該記憶した情報を順次読み出して前照灯の配光パターンを算出し、算出した配光パターンと、読み出した自車位置と車体方位とを、前記地図データから読み出した自車位置を中心とする周辺地図に重ねて前記表示装置上に表示させるように構成されていることを特徴とするカーナビゲーション装置。
【図1】


【図2】
【図2】
【公開番号】特開2006−21665(P2006−21665A)
【公開日】平成18年1月26日(2006.1.26)
【国際特許分類】
【出願番号】特願2004−201891(P2004−201891)
【出願日】平成16年7月8日(2004.7.8)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年1月26日(2006.1.26)
【国際特許分類】
【出願日】平成16年7月8日(2004.7.8)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]