
車両周囲視野を表示するための光出力デバイスの制御方法および車両周囲視野システム
【課題】車両周囲視野を表示するための光出力デバイスの制御方法および車両周囲視野システムの提供。
【解決手段】少なくとも1つの車両コンポーネント(10〜18)を備えている車両モデル(2)を含む車両周囲視野(1)を表示するための光出力デバイス(31)の制御方法であって、前記少なくとも1つの車両コンポーネント(10〜18)に関する表示制御情報を決定することと、、前記車両モデル(2)が前記表示制御情報に従って前記少なくとも1つの車両コンポーネント(10〜18)の描写に適応するように、前記車両周囲視野(1)を表示するように前記光出力デバイス(31)を制御することと、を含む、方法。
【解決手段】少なくとも1つの車両コンポーネント(10〜18)を備えている車両モデル(2)を含む車両周囲視野(1)を表示するための光出力デバイス(31)の制御方法であって、前記少なくとも1つの車両コンポーネント(10〜18)に関する表示制御情報を決定することと、、前記車両モデル(2)が前記表示制御情報に従って前記少なくとも1つの車両コンポーネント(10〜18)の描写に適応するように、前記車両周囲視野(1)を表示するように前記光出力デバイス(31)を制御することと、を含む、方法。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両周囲視野を表示するための光出力デバイスの制御方法および車両周囲視野システムに関するものである。
【背景技術】
【0002】
近年、車両における画像センサの使用が益々増加している。これらの画像センサ/カメラは、多くの場合に、車両環境を追跡記録し、物体を識別し、そして起こり得る危険な運転状況を運転手に警告する運転補助システムに用いられる。画像センサはさらに、後方カメラとしても用いられ、これは、運転手による車両の駐車を支援し、かつ車両後方に位置するあらゆる障害物を運転手に認識させるのに役立つ。種々の画像センサにより、車両およびその周囲環境の三次元画像が提供される。このような車両周囲視野システムの例は、欧州特許第11162470.6号に開示されている。
【0003】
しかしながら、車両周囲環境の動的表示と静的な車両モデルとの組み合わせが、ユーザに混乱を与える傾向がある。背景移動に伴う動きを考慮しない静的かつ所定の車両モデルの知覚は、注意を散漫にするものとして知られている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
これに関連して、車両周囲視野内において、現実により即した車両モデルの斜視図を運転手に提供する要求がある。さらに、多用途性を向上したユーザインターフェースを提供する要求もある。
【課題を解決するための手段】
【0005】
この要求は、独立クレームの特徴により解決される。従属クレームは実施形態を記述する。
【0006】
一態様に従い、車両モデルを含む車両周囲視野を表示するための光出力デバイスの制御方法を提供する。この方法は、少なくとも1つの車両コンポーネントに関する表示制御情報を決定することと、その表示制御情報に従い、車両モデルが少なくとも1つの車両コンポーネントの描写に適応するように車両周囲視野を表示する光出力デバイスを制御することとを含む。
【0007】
表示制御情報は、各車両コンポーネントの現在の動作状態に関連し得る。このような表示制御情報は、例えば、車輪、ライト、または車体またはドアといった他の内部および外部車両コンポーネントなどの車両コンポーネントに関する情報を含み得る。表示制御情報に含まれる車両コンポーネントに関する情報は、車両周囲視野に表示された車両モデルに適応するように利用され得る。これにより、現実により即した車両の図式表示、すなわち、車両モデルを得ることができる。
【0008】
この効果として、表示制御情報に基づく定義された方法により、各車両コンポーネントを車両周囲視野内に表現できる。特に、車両コンポーネントは、車両周囲視野の知覚および理解がユーザにとってより容易な方法によって表現され得る。車両周囲視野に表示された情報をユーザが直観的に理解可能であれば、ユーザの注意が散漫になることは少なくなる。そして、注意散漫に伴う危険な状況が低減される。
【0009】
例示として、表示制御情報は、ある車両コンポーネントの作用方法または車両コンポーネントの処理特性を詳細に特定し得る。表示制御情報は、色、速度、車両コンポーネントの有無、車両コンポーネントの動作状態などの情報を含み得る。このような情報を与えると、車両周囲視野内の車両モデルは適宜に適応し得る。
【0010】
さらなる例示として、車両の窓の表示制御情報は、全開窓の図式表示を与えるための「全開窓」に関連し得る。他の表示制御情報として、「半開き窓」または「閉じた窓」に関連し得る情報の提供も可能である。「窓ガラスの65パーセントが引っ込んでいる」といった、より正確な表示制御情報を特定することも可能である。
【0011】
さらなる例示として、少なくとも1つの車両コンポーネントの現在の動作状態を表す状態情報を受信することも可能である。表示制御情報は、少なくとも受信した状態情報に基づいて決定される。
【0012】
実際には、状態情報は、ドアの開放状態、ハンドルの回転角などのある車両コンポーネントの現在の動作状態、または車両自体の速度などの情報を含み得る。他の車両コンポーネントに関する他の形態の多くの状態情報も使用できる。状態情報は、各車両コンポーネントの現在の動作状態の変化に伴い更新され得る。ある車両コンポーネントのこのような最新の状態情報に基づいて、各表示制御情報を決定することができる。この状況では、各表示制御情報は、詳細には下記するように、状態情報が提供される車両コンポーネントそれ自体、さらには他の車両コンポーネントに関連し得る情報である。
【0013】
例えば、車両ドアに関するこの表示制御情報は、ドアの開放状態に関する、受信した状態情報を含み得る。ドアが広く開いている場合には、表示制御情報は「ドア全開」を示し得る。ただし、車両の車輪に関する表示制御情報は、複数の他の車両コンポーネントから受信した状態情報から得ることができる。例示として、ハンドルの回転角、車両速度、および車輪径から、回転角および回転速度に関する車両車輪の表示制御情報を得ることができる。それ故、車輪の表示制御情報は、車両の他のコンポーネントから得られた状態情報から決定できる。
【0014】
さらなる実施には、車両ライトのスイッチが入っているか、切られているかに関する表示制御情報の取得がある。通常、最新の車両では、このような情報は既に、車両に含まれているデータバスシステムに保存されている。あるの車両コンポーネントは、時折、このようなデータバスシステムを通じて現在の動作状態を送信する。乗用車内の既存の機構を通じて車両コンポーネントから状態情報を取得することができる。
【0015】
車両の動作状態に関する状態情報を取得するための専用センサを備えることが出来る。例えば、センサは車両の座席内に備えられ得、ある座席に自動車乗員が居るか否かを示す。あるセンサが、例えば、重量測定を手段としてあるの座席における乗員の存在を示す場合には、車両コンポーネントの有無に関する表示制御情報が決定され得、自動車乗員の形態を表す。自動車乗員が車両に存在する場合には、車両周囲視野の車両モデルは、自動車乗員の図式表示を表現するように適応され得る。
【0016】
状態情報は特に、車輪回転速度、ハンドル角度、車両速度、ライトの動作状態、窓ガラス位置、サンルーフ位置の少なくとも1つの情報を含み得る。例えば、車輪回転速度は、車両車輪内に位置するセンサにより直接取得できる。この情報を取得した場合には、車両モデルにおける車両の回転率を視覚化するための、光出力デバイスの制御にその後用いられるある回転率を確定することにより、その情報を用いて表示制御情報を決定できる。例えば、車両速度および車輪径に関する所定の情報からこの情報を得ることもできる。例えば、ハンドル角度、場合によっては車両速度からハンドルの回転角を決定することもできる。例示として、ハンドル角度を利用して、車両速度を考慮に入れてそのハンドルの回転角を決定できる。それ故、ハンドルの回転角を決定するために2つの状態情報を受信する必要がある。ライトの動作状態、窓ガラス位置、およびサンルーフ位置をさらに用いて、車両周囲視野における車両モデルを図式的に適応させることができる。
【0017】
さらに、状態情報の変化を検出した際には、表示制御情報の決定を何度も繰り返すことができる。例示として、ユーザによる車両ライトのスイッチの入力、または方向指示器の使用などの、ある車両コンポーネントの動作状態の変化を検出した際には、表示制御情報を適宜に更新できる。この結果、車両周囲視野における各車両コンポーネントの図式表示が更新される。特に、ユーザがある動作を実行する際に、その動作も、車両周囲視野における車両の図式表示に幾分影響を与えることをユーザ自身が認識できるという利点がある。一方では、示された車両モデルをユーザが直観的に理解および知覚できるため、危険な注意散漫の可能性を低減することができる。他方では、車両周囲視野内の車両モデルの表現において、ある動作に対応する図式を認識できるため、より高度なフィードバックをユーザに与えることができる。それ故、ユーザの意図的でない動作が回避または最低限に制限され得る。例えば、意図的でない長距離におけるライト使用は、車両周囲視野を通じて容易に知覚され得る。別の利点は、動作のフィードバックがユーザに与えられることである。ユーザは車両のフロントライトのスイッチを切ることができる。車両のフロントライトおよびテールランプの図式表示が、それらの動作状態を示すために更新される場合には、ユーザが車両周囲視野における彼自身の動作のグラフィカルフィードバックを知覚できないことに起因する注意散漫の瞬間が回避され得る。
【0018】
ただし、表示制御情報は、ユーザ入力によって取得されたユーザ構成データに少なくとも基づいても決定され得る。例えば、ユーザの要求に従うある表示制御情報に適応可能なヒューマンインターフェースデバイスを備えてもよい。例えば、ユーザは、車両周囲視野内の車両モデルのある外観により注意散漫になる可能性がある。このような注意散漫を回避するために、彼の要求に従う表示制御情報を決定する機会をユーザに与えることが利点となり得る。例えば、各表示制御情報は、車両モデルがある車体塗料を有するように適応し得る。これは、車両モデルの外側の色がユーザの要求に従い適応し得ることを意味する。
【0019】
ユーザ構成データはデータベースに保存され得る。データベースにユーザ構成データを保存することにより、長期にわたり、車両モデルのある外観を維持することができる。例えば、ユーザ構成データを用いて乗用車を製造する場合には、車両モデルの車体の色の設定が利点となり得る。これにより、製造業者は、実車両パラメータに従い、車両モデルに適応させる機会を得ることができる。各センサの欠如に起因して状態情報を受信できないコンポーネントなどのある車両コンポーネントに関する表示制御情報は、事前に定義されてもよい。これにより、例えば、ある車両コンポーネントに関する状態情報を全く受信できない場合でさえも、車両モデルの外観をさらに適応させることが可能になる。この状態情報には、車体の色、サンルーフもしくは後部ドアなどの車体のある特徴の有無、またはユーザが購入したオプション特徴が含まれる。例えば、通常、リフトバックの有無を示すセンサは無い。各表示制御情報が事前に定義される場合には、その結果、両周囲視野内の車両モデルの外観がそれに適宜に適応する。
【0020】
ここに記載した態様に従う方法は、車両周囲視野におけるバーチャルカメラ位置を定めることと、バーチャルカメラ位置および表示制御情報に基づいて、少なくとも1つの車両コンポーネントの図式表示を計算することとをさらに含み得る。例えば、表示制御情報が車両の窓のある開放角度を、例えば、「窓ガラスが半分まで引っ込んだ」と特定する場合には、車両周囲視野の車両モデルにおける窓の図式表示は、グラフィカルプロセッサにより計算され得る。半開き窓などの図式表示が車両周囲視野を表現するために用いられるカメラ位置に依存し得るため、この情報を正確に示す車両の図式表示モデルの計算において、表示制御情報を適宜に解釈する必要が生じ得る。
【0021】
特に、バーチャルカメラ位置の組み合わせは多数あり得、かつ種々の車両コンポーネントに関する多くの表示制御情報が与えられ得る。カメラ位置と表示制御情報との各組み合わせに応じた、例えば、画像データの形態である、一組みの所定の図式表示の提供よりもむしろ、毎回、表示制御情報とバーチャルカメラ位置とに基づいて車両コンポーネントの図式表示を計算することが有利となり得る。カメラ位置と表示制御情報との組み合わせに応じた、図式表示の保存が要求されない場合には、保存スペース要求が低減され得る。このような欠陥を克服するために、表示制御情報を解釈し、グラフィカル出力を計算するように構成された手段が備えられ得る。典型的なこのような手段は、表示制御情報を正確に解釈するように構成されたグラフィカルプロセッサである。
【0022】
さらに、車両周囲視野の表示は、少なくとも1つの車両コンポーネントの動的アニメーションを含み得る。例えば、車輪の旋回、方向指示器の発光、または窓ガラスの開閉の動画化が可能であり得る。車両モデルのこのような動的アニメーションが提供されると、ユーザは、車両周囲視野をより直観的に知覚することができる。より現実てきな車両周囲視野が提供される。動的に動画化された車両モデルは、車両周囲視野それ自体が提供する動的な周囲環境に適応するため、現実により即した車両周囲視野が提供される。背景移動と静的な車両モデルとの対比は回避され、それ故、ユーザが危険な注意散漫状態に陥る可能性がさらに低減される。
【0023】
特に、少なくとも1つの車両コンポーネントは、車輪、ハンドル、窓ガラス、フロントライト、テールランプ、サンルーフ、車体塗料、方向指示器、または自動車乗員を含む群から選択され得る。それらの車両コンポーネントに対する車両モデルの適応により、車両モデルは結果として、ユーザが実生活で知覚するような車両モデルとなり得る。例えば、ハンドルの回転角は、車両の現在の運転状況に従い適応し得る。車両が動いている時、車両周囲視野における背景が車両モデルに関連して移動する。車輪が車両速度に準じて回転すると、画像センサにより得られた車両モデルおよび背景は、直観的に知覚可能な表示をユーザに提供する。
【0024】
さらなる態様に従い、車両モデルを含む車両周囲視野を表示する光出力デバイスを制御するためのプロセッサを備えている車両周囲視野システムが提供される。プロセッサは、少なくとも1つの車両コンポーネントに関する表示制御情報を決定し、その表示制御情報に従い、車両モデルが少なくとも1つの車両コンポーネントの描写に適応するように車両周囲視野を表示する光出力デバイスを制御するように構成される。
【0025】
このような構造を有するシステムにおいて、対応する方法に関して説明した対応する効果が達成され得る。
【0026】
さらなる態様に従い、コンピュータ実行可能命令を含むコンピュータプログラムが提供される。この命令は、車両周囲視野システムのプロセッサにより実行されると、車両周囲視野システムに、態様または実施形態の方法を実行させる。
【0027】
プロセッサは、一態様または実施形態の方法を実行するように構成され得る。
【0028】
例えば、本願発明は以下の項目を提供する。
(項目1)
少なくとも1つの車両コンポーネント(10〜18)を備えている車両モデル(2)を含む車両周囲視野(1)を表示するための光出力デバイス(31)の制御方法であって、
上記少なくとも1つの車両コンポーネント(10〜18)に関する表示制御情報を決定することと、
上記車両モデル(2)が上記表示制御情報に従って上記少なくとも1つの車両コンポーネント(10〜18)の描写に適応するように、上記車両周囲視野(1)を表示するように上記光出力デバイス(31)を制御することと、を含む、方法。
(項目2)
上記少なくとも1つの車両コンポーネントの現在の動作状態を表す、上記少なくとも1つの車両コンポーネントに関する状態情報を受信することをさらに含み、上記表示制御情報は、少なくとも上記受信した状態情報に基づいて決定される、上記項目に記載の方法。
(項目3)
上記状態情報は、車輪回転速度、ハンドル角度、車両速度、ライトの動作状態、窓ガラス位置、サンルーフ位置の少なくとも1つを含む、上記項目のいずれか一項に記載の方法。
(項目4)
上記表示制御情報の上記決定を、状態情報の変化を検出した際に、長期にわたり繰り返す、上記項目のいずれか一項に記載の方法。
(項目5)
上記表示制御情報は、ユーザ入力によって取得されたユーザ構成データに少なくとも基づいて決定される、上記項目のいずれか一項に記載の方法。
(項目6)
上記ユーザ構成データはデータベースに保存される、上記項目のいずれか一項に記載の方法。
(項目7)
上記車両周囲視野(1)のバーチャルカメラ位置を定めることと、
上記バーチャルカメラ位置および上記表示制御情報に基づいて、上記少なくとも1つの車両コンポーネントの図式表示を計算することと、をさらに含む、上記項目のいずれか一項に記載の方法。
(項目8)
上記車両周囲視野(1)の表示は、上記少なくとも1つの車両コンポーネントの動的アニメーションを含む、上記項目のいずれか一項に記載の方法。
(項目9)
上記少なくとも1つの車両コンポーネントは、車輪(10)、ハンドル(17)、窓ガラス(16)、フロントライト(12)、テールランプ(18)、サンルーフ(11)、車体塗料(15)、方向指示器(13)、または自動車乗員(14)を含む群から選択される、上記項目のいずれか一項に記載の方法。
(項目10)
少なくとも1つの車両コンポーネント(10〜18)を備えている車両モデル(2)を含む車両周囲視野(1)を表示するための光出力デバイス(31)を制御するためのプロセッサであって、
上記少なくとも1つの車両コンポーネントに関する表示制御情報を決定し、
上記車両モデル(2)が上記表示制御情報に従って上記少なくとも1つの車両コンポーネントの描写に適応するように、上記車両周囲視野(1)を表示するように上記光出力デバイス(31)を制御することと、を含む、方法。
(項目11)
上記プロセッサは、上記項目のいずれか一項に従う方法を実行するように構成されている、上記項目に記載の車両周囲視野システム(3)。
【0029】
(摘要)
本発明は、車両モデル(2)を含む車両周囲視野(1)を表示するための光出力デバイスの制御方法に関するものである。この方法は、少なくとも1つの車両コンポーネント(10〜18)に関する表示制御情報を決定することと、その表示制御情報に従い、車両モデル(2)が少なくとも1つの車両コンポーネント(10〜18)の描写に適応するように車両周囲視野(1)を表示する光出力デバイスを制御することとを含む。
【図面の簡単な説明】
【0030】
本発明の実施形態を、添付図面を参照して以下により詳細に記載する。
【図1】車両周囲視野システムを示す概略図である。
【図2】車両周囲視野を示す概略図である。
【図3】車両コンポーネントに関する表示制御情報に基づいて、車両周囲視野を適応させる方法を示すフローチャートである。
【発明を実施するための形態】
【0031】
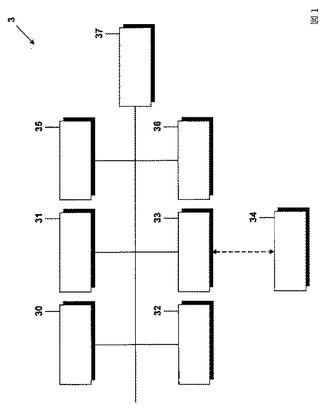
図1に車両周囲視野システム3の概略を示す。車両周囲視野システム3はプロセッサ30を備えている。プロセッサ30は、種々の車両コンポーネント32,34に関する表示制御情報を決定するように構成される。これは特に、車両周囲視野に含まれる車両モデルに適応するように光出力デバイス31を制御し、各表示制御情報に基づいて車両コンポーネント32,34を表現するようにさらに構成される。
【0032】
例えば、光出力デバイス31は、カーナビシステムまたは車両コンピュータの表示部でもよい。典型的には、最新のナビゲーションシステムは、ナビゲーションに関する情報よりもむしろ、車両周囲視野を表示するための、ある状況において用いられ得る表示部を備えている。また、光出力デバイスは、車両周囲視野システムそれ自体のみに用いられる表示部でもよい。
【0033】
表示制御情報は、車両コンポーネント32それ自体か、または車両コンポーネント34の動作状態を感知するセンサ33のいずれかから受信した状態情報に少なくとも一部が基づいて決定される。車両ライトが照射状態である状況では、車両コンポーネント32が状態情報を直接送信し得る。典型的には、「ライトオン」、「ライトオフ」、または「長距離におけるライトオン」などである車両ライトの状態に関する情報は、車両データバスに保存されている。次に、このような情報を直接用いて各表示制御情報を決定できる。さらに、車両コンポーネント34の現在の状態を決定するためのセンサ33が備えられ得る。例えば、センサは、ある座席に自動車乗員が居るか否かを感知し得る。センサ33は、トランクのふたまたは車両ドアの開閉状態を感知できる。センサは、車両ドアが開いていることを感知した場合には、各表示制御情報に適応し、車両周囲視野において車両ドアを同一の開放状態に表示する。別の車両コンポーネントに関する表示制御情報を決定するために、複数の車両コンポーネントから受信した状態情報を使用可能なことが当然ながら理解される。
【0034】
車両周囲視野システム3はさらに、ヒューマンインターフェースデバイス35を備えている。ヒューマンインターフェースデバイス35は、ユーザが、ユーザ構成データを通じて表示制御情報を設定可能なように適応する。例えば、ユーザは、ある車両コンポーネントの色、またはその有無を特定できる。ユーザはさらに、自動車乗員のある外観を特定できる。ユーザは、自動車乗員がユーザになじみ深い図式表示として表現されるように、特定の画像データを提供できる。さらに、車両の製造業者は、ユーザの要求に従う、種々の車両コンポーネントに関するユーザ構成データを設定できる。例えば、製造業者はユーザ構成データを特定し得、これにより、車両にある特徴が車両周囲視野の車両モデルにおいて適宜に表現される。このようなある特徴は、乗用車の色、ハッチバックもしくはリフトバックなどの車体のある形状、サンルーフの有無、車両後部ドアの有無などが含まれ得る。このような車両コンポーネントでは、適宜に適応したセンサが欠如し得るため、状態情報に基づいて表示制御情報を決定することが困難な場合がある。その結果、このようなユーザ構成データはデータベース36に保存される。データベース36により、長期にわたり繰り返しある車両コンポーネントに関する状態情報を全く受信しない場合でさえも、ユーザ構成データに基づいて表示構成データを決定できる。
【0035】
グラフィカルプロセッサ37は、プロセッサ30から得た表示制御情報を解釈するように適応し、表示制御情報に従う車両コンポーネントの図式表示を提供する。この適応は、正確な車両コンポーネントの図式表示を計算するための、車両周囲視野の視覚または他の特性を決定することを含む。通常では、種々のあり得る車両コンポーネントの表示制御情報と、種々のあり得る車両周囲視野の視角との組み合わせに起因して、車両モデルにおいて多くの種類の車両コンポーネントの図式表示が存在する可能性がある。このため、通常では、車両周囲視野システム3それ自体におけるそれらの組み合わせごとに図式表示を計算する必要がある。別の可能性として、表示制御情報と、視角などの車両周囲視野の形態とのある組み合わせに関する図式表示に関連するデータベースを備えることができる。データベースは画像データを含み、これを、表示制御情報に基づく車両コンポーネントの図式表示として用いることができる。
【0036】
図1に示す種々の構成要素は別々に記述したが、種々の構成要素が単一ユニットに一体化され得ることが当然ながら理解される。種々の構成要素は、ハードウェア、ソフトウェア、またはそれらの組み合わせとして実施され得る。
【0037】
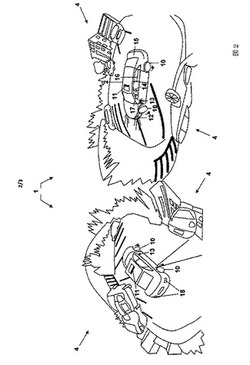
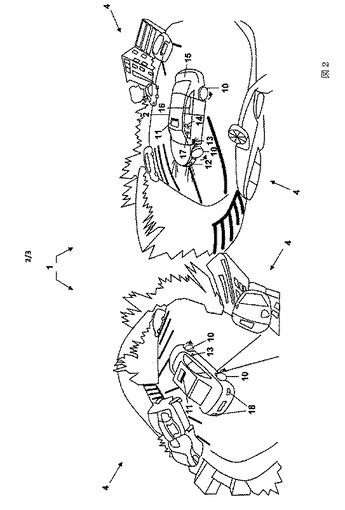
図2に車両周囲視野の概略1を示す。特に、種々の車両コンポーネントを備えた車両モデル2が背景4に示される。背景4は、車両周囲に配置された画像センサにより取得される。通常では、車両が移動しているため、背景4は車両と共に移動する。それ故、背景4は車両モデル2の動的な周囲環境を構成する。車両モデル2は、種々の車両コンポーネントの特性を動的に表示するように適応する。例えば、車輪10は、図2に矢印で示すように、回転している状態で示される。さらに、車輪10の示す描写は、回転角を示すように適応する。図2では、車両モデル2は左折して駐車場に近づいている。それ故、図2では、前輪の組は左折を表す回転角を有するように適応する。さらに、フロントライト12が照射される。各表示制御情報が車両のフロントライトの照射を示す場合には、フロントライト12が照射されている。また、左方向指示器13が点滅する。車両ユーザが方向指示器のスイッチを入れると、各状態情報を受信し、各表示制御情報が適宜に決定される。図2に示す車両コンポーネントにはさらに、サンルーフ11、自動車乗員14、車体塗料15、窓ガラス16、ハンドル17、およびテールランプ18が含まれる。例えば、サンルーフ11は、車両にサンルーフ11が存在することを示している。製造業者またはユーザは、サンルーフが表現されるように、ユーザ構成データを通じて各表示制御情報を設定できる。さらに、サンルーフ11に関する表示制御情報は、その開放状態に関する情報を含む。サンルーフ11は、半開きとして、この表示制御情報に基づいて表現される。各々、自動車乗員14の存在は、各座席に備えられたいくつかのセンサのデータを通じて決定される。表示制御情報は自動車乗員の存在を表し、それ故、車両周囲視野に図式表示を提供する。特に、自動車乗員はユーザ定義方法により表示される。ユーザは、ユーザ構成データを生成可能な画像データを提供することにより、自動車乗員14を画像データに従い表示するような表示制御情報を決定できる。各動作および構造は、他の車両コンポーネントを表示する方法に適合する。
【0038】
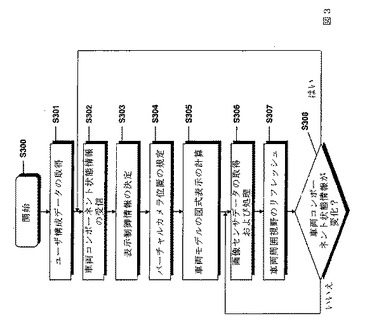
図3に、車両コンポーネントに関する表示制御情報に基づいた、車両周囲視野を適応させる方法を説明するフローチャートを示す。この方法はステップ300から開始される。ステップ301において、ある車両コンポーネントに関するユーザ構成データを取得する。例えば、いくつかのヒューマンインターフェースデバイスを通じてユーザ構成データを取得できる。ユーザはグラフィカルインターフェースを備え得、これを用いて、ある車両コンポーネントに関するユーザ構成データを特定できる。このような車両コンポーネントは、車体塗料または車室の色でもよい。ユーザは彼の好みに従いパラメータを特定できる。ユーザはさらに、ユーザ構成データに基づいてある車両コンポーネントを個人化できる。例えば、ユーザは、このような画像データに基づいて自動車乗員を表現するためのいくつかの画像データを提供できる。
【0039】
さらに、ステップ301において、データベースからユーザ構成データを取得できる。データベースには、所定のユーザ構成データが供給される。このようなユーザ構成データは、例えば、車両の製造業者によりプリセットされ得る。車両の製造業者は、車体塗料それ自体に基づく色などのあるユーザ構成データを特定する。また、ユーザ構成データは、ある車両コンポーネントの有無またはその特徴に関する情報を含み得る。例えば、ある車両がサンルーフを備えている場合には、ユーザ構成データはサンルーフの存在を示す。
【0040】
ステップ302において、車両コンポーネントの状態情報を受信する。状態情報は、種々の車両コンポーネントの動作状態に関する情報を含む。このような状態情報は、例えば、車両速度、ハンドルの回転角、車両ライトのオン/オフ状態、窓ガラスの開放状態などを示し得る。
【0041】
ステップ303において、このような状態情報およびユーザ構成データに基づいて、表示制御情報を決定する。例えば、車両速度およびハンドル角度から、ハンドルの回転角に関する表示制御情報を決定する。窓ガラスの状態情報から、窓ガラスそれ自体に関する表示制御情報を決定する。ステップ303においてさらに、ある車両コンポーネント状態情報、例えば、自動車乗員の有無またはトランクのふたの開放状態に関するセンサのデータを用いて各表示制御情報を決定する。
【0042】
次に、テップ304において、車両周囲視野におけるバーチャルカメラ位置を定める。例えば、バーチャルカメラ位置は、ユーザにより特定され得るか、システムにより事前に定義され得る。ステップ303およびステップ304において、バーチャルカメラ位置および表示制御情報を決定および定めると、次に、車両モデルの図式表示を計算する。特に、表示制御情報は図式表示に関連し、転じて、バーチャルカメラ位置に応じて決まる。
【0043】
例えば、窓ガラスが若干開いている場合には、バーチャルカメラ位置次第で、窓は車両モデルにその状態とは違って表示され得る。バーチャルカメラが車両の真上に位置する場合には、車両周囲視野において窓ガラスの開放をほぼ視認することができない。しかしながら、バーチャルカメラが窓ガラスに直面するように正しく配置された場合には、若干開いている窓ガラスの位置を、図式表示においてより容易に視認できる。
【0044】
ステップ305において車両の図式表示モデルを計算すると、次に、ステップ306において、画像センサのデータを取得して処理する。これは、車両周囲視野の背景を提供する種々の画像センサが、車両周囲視野に図式表示を提供するために読み出されることを意味する。最後に、ステップ307において、車両周囲視野を表示するか、表示をリフレッシュして新たに計算した画像データを表示する。
【0045】
ステップ308において、ある車両コンポーネント状態情報が変化したか否かを確認する。この車両コンポーネント状態情報、例えば、表示制御情報の再決定、それ故、車両周囲視野の車両モデルの更新が必要となるある量によって変化を意味する。状態情報または状態情報における変化に関する閾値比較を実行する。状態情報又状態情報の変化の閾値比較ができうる。ステップ308において、状態情報がそれ相応に変化したことを決定した場合には、この方法はステップ302に継続する。ここで、車両コンポーネント状態情報を新たに受信し、これに基づいて、ステップ303において、表示制御情報を新たに決定する。しかしながら、ステップ308において、車両コンポーネント状態情報が変化していないか、その変化がわずかのみであることを決定した場合には、差し支え無くステップ306に継続する。ここで、画像センサのデータを新たに取得して処理することにより、背景を更新した図式表示を提供する。
【0046】
ユーザが最新の車両周囲視野をこれ以上必要としない場合には、図3に従う処理は終了する。
【0047】
本発明を、図面に示す実施形態に関連するさらなる詳細に関して記述したが、他の実施形態における変更が可能である。例えば、他の車両コンポーネントに関する表示制御情報を決定できる。
【技術分野】
【0001】
本発明は、車両周囲視野を表示するための光出力デバイスの制御方法および車両周囲視野システムに関するものである。
【背景技術】
【0002】
近年、車両における画像センサの使用が益々増加している。これらの画像センサ/カメラは、多くの場合に、車両環境を追跡記録し、物体を識別し、そして起こり得る危険な運転状況を運転手に警告する運転補助システムに用いられる。画像センサはさらに、後方カメラとしても用いられ、これは、運転手による車両の駐車を支援し、かつ車両後方に位置するあらゆる障害物を運転手に認識させるのに役立つ。種々の画像センサにより、車両およびその周囲環境の三次元画像が提供される。このような車両周囲視野システムの例は、欧州特許第11162470.6号に開示されている。
【0003】
しかしながら、車両周囲環境の動的表示と静的な車両モデルとの組み合わせが、ユーザに混乱を与える傾向がある。背景移動に伴う動きを考慮しない静的かつ所定の車両モデルの知覚は、注意を散漫にするものとして知られている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
これに関連して、車両周囲視野内において、現実により即した車両モデルの斜視図を運転手に提供する要求がある。さらに、多用途性を向上したユーザインターフェースを提供する要求もある。
【課題を解決するための手段】
【0005】
この要求は、独立クレームの特徴により解決される。従属クレームは実施形態を記述する。
【0006】
一態様に従い、車両モデルを含む車両周囲視野を表示するための光出力デバイスの制御方法を提供する。この方法は、少なくとも1つの車両コンポーネントに関する表示制御情報を決定することと、その表示制御情報に従い、車両モデルが少なくとも1つの車両コンポーネントの描写に適応するように車両周囲視野を表示する光出力デバイスを制御することとを含む。
【0007】
表示制御情報は、各車両コンポーネントの現在の動作状態に関連し得る。このような表示制御情報は、例えば、車輪、ライト、または車体またはドアといった他の内部および外部車両コンポーネントなどの車両コンポーネントに関する情報を含み得る。表示制御情報に含まれる車両コンポーネントに関する情報は、車両周囲視野に表示された車両モデルに適応するように利用され得る。これにより、現実により即した車両の図式表示、すなわち、車両モデルを得ることができる。
【0008】
この効果として、表示制御情報に基づく定義された方法により、各車両コンポーネントを車両周囲視野内に表現できる。特に、車両コンポーネントは、車両周囲視野の知覚および理解がユーザにとってより容易な方法によって表現され得る。車両周囲視野に表示された情報をユーザが直観的に理解可能であれば、ユーザの注意が散漫になることは少なくなる。そして、注意散漫に伴う危険な状況が低減される。
【0009】
例示として、表示制御情報は、ある車両コンポーネントの作用方法または車両コンポーネントの処理特性を詳細に特定し得る。表示制御情報は、色、速度、車両コンポーネントの有無、車両コンポーネントの動作状態などの情報を含み得る。このような情報を与えると、車両周囲視野内の車両モデルは適宜に適応し得る。
【0010】
さらなる例示として、車両の窓の表示制御情報は、全開窓の図式表示を与えるための「全開窓」に関連し得る。他の表示制御情報として、「半開き窓」または「閉じた窓」に関連し得る情報の提供も可能である。「窓ガラスの65パーセントが引っ込んでいる」といった、より正確な表示制御情報を特定することも可能である。
【0011】
さらなる例示として、少なくとも1つの車両コンポーネントの現在の動作状態を表す状態情報を受信することも可能である。表示制御情報は、少なくとも受信した状態情報に基づいて決定される。
【0012】
実際には、状態情報は、ドアの開放状態、ハンドルの回転角などのある車両コンポーネントの現在の動作状態、または車両自体の速度などの情報を含み得る。他の車両コンポーネントに関する他の形態の多くの状態情報も使用できる。状態情報は、各車両コンポーネントの現在の動作状態の変化に伴い更新され得る。ある車両コンポーネントのこのような最新の状態情報に基づいて、各表示制御情報を決定することができる。この状況では、各表示制御情報は、詳細には下記するように、状態情報が提供される車両コンポーネントそれ自体、さらには他の車両コンポーネントに関連し得る情報である。
【0013】
例えば、車両ドアに関するこの表示制御情報は、ドアの開放状態に関する、受信した状態情報を含み得る。ドアが広く開いている場合には、表示制御情報は「ドア全開」を示し得る。ただし、車両の車輪に関する表示制御情報は、複数の他の車両コンポーネントから受信した状態情報から得ることができる。例示として、ハンドルの回転角、車両速度、および車輪径から、回転角および回転速度に関する車両車輪の表示制御情報を得ることができる。それ故、車輪の表示制御情報は、車両の他のコンポーネントから得られた状態情報から決定できる。
【0014】
さらなる実施には、車両ライトのスイッチが入っているか、切られているかに関する表示制御情報の取得がある。通常、最新の車両では、このような情報は既に、車両に含まれているデータバスシステムに保存されている。あるの車両コンポーネントは、時折、このようなデータバスシステムを通じて現在の動作状態を送信する。乗用車内の既存の機構を通じて車両コンポーネントから状態情報を取得することができる。
【0015】
車両の動作状態に関する状態情報を取得するための専用センサを備えることが出来る。例えば、センサは車両の座席内に備えられ得、ある座席に自動車乗員が居るか否かを示す。あるセンサが、例えば、重量測定を手段としてあるの座席における乗員の存在を示す場合には、車両コンポーネントの有無に関する表示制御情報が決定され得、自動車乗員の形態を表す。自動車乗員が車両に存在する場合には、車両周囲視野の車両モデルは、自動車乗員の図式表示を表現するように適応され得る。
【0016】
状態情報は特に、車輪回転速度、ハンドル角度、車両速度、ライトの動作状態、窓ガラス位置、サンルーフ位置の少なくとも1つの情報を含み得る。例えば、車輪回転速度は、車両車輪内に位置するセンサにより直接取得できる。この情報を取得した場合には、車両モデルにおける車両の回転率を視覚化するための、光出力デバイスの制御にその後用いられるある回転率を確定することにより、その情報を用いて表示制御情報を決定できる。例えば、車両速度および車輪径に関する所定の情報からこの情報を得ることもできる。例えば、ハンドル角度、場合によっては車両速度からハンドルの回転角を決定することもできる。例示として、ハンドル角度を利用して、車両速度を考慮に入れてそのハンドルの回転角を決定できる。それ故、ハンドルの回転角を決定するために2つの状態情報を受信する必要がある。ライトの動作状態、窓ガラス位置、およびサンルーフ位置をさらに用いて、車両周囲視野における車両モデルを図式的に適応させることができる。
【0017】
さらに、状態情報の変化を検出した際には、表示制御情報の決定を何度も繰り返すことができる。例示として、ユーザによる車両ライトのスイッチの入力、または方向指示器の使用などの、ある車両コンポーネントの動作状態の変化を検出した際には、表示制御情報を適宜に更新できる。この結果、車両周囲視野における各車両コンポーネントの図式表示が更新される。特に、ユーザがある動作を実行する際に、その動作も、車両周囲視野における車両の図式表示に幾分影響を与えることをユーザ自身が認識できるという利点がある。一方では、示された車両モデルをユーザが直観的に理解および知覚できるため、危険な注意散漫の可能性を低減することができる。他方では、車両周囲視野内の車両モデルの表現において、ある動作に対応する図式を認識できるため、より高度なフィードバックをユーザに与えることができる。それ故、ユーザの意図的でない動作が回避または最低限に制限され得る。例えば、意図的でない長距離におけるライト使用は、車両周囲視野を通じて容易に知覚され得る。別の利点は、動作のフィードバックがユーザに与えられることである。ユーザは車両のフロントライトのスイッチを切ることができる。車両のフロントライトおよびテールランプの図式表示が、それらの動作状態を示すために更新される場合には、ユーザが車両周囲視野における彼自身の動作のグラフィカルフィードバックを知覚できないことに起因する注意散漫の瞬間が回避され得る。
【0018】
ただし、表示制御情報は、ユーザ入力によって取得されたユーザ構成データに少なくとも基づいても決定され得る。例えば、ユーザの要求に従うある表示制御情報に適応可能なヒューマンインターフェースデバイスを備えてもよい。例えば、ユーザは、車両周囲視野内の車両モデルのある外観により注意散漫になる可能性がある。このような注意散漫を回避するために、彼の要求に従う表示制御情報を決定する機会をユーザに与えることが利点となり得る。例えば、各表示制御情報は、車両モデルがある車体塗料を有するように適応し得る。これは、車両モデルの外側の色がユーザの要求に従い適応し得ることを意味する。
【0019】
ユーザ構成データはデータベースに保存され得る。データベースにユーザ構成データを保存することにより、長期にわたり、車両モデルのある外観を維持することができる。例えば、ユーザ構成データを用いて乗用車を製造する場合には、車両モデルの車体の色の設定が利点となり得る。これにより、製造業者は、実車両パラメータに従い、車両モデルに適応させる機会を得ることができる。各センサの欠如に起因して状態情報を受信できないコンポーネントなどのある車両コンポーネントに関する表示制御情報は、事前に定義されてもよい。これにより、例えば、ある車両コンポーネントに関する状態情報を全く受信できない場合でさえも、車両モデルの外観をさらに適応させることが可能になる。この状態情報には、車体の色、サンルーフもしくは後部ドアなどの車体のある特徴の有無、またはユーザが購入したオプション特徴が含まれる。例えば、通常、リフトバックの有無を示すセンサは無い。各表示制御情報が事前に定義される場合には、その結果、両周囲視野内の車両モデルの外観がそれに適宜に適応する。
【0020】
ここに記載した態様に従う方法は、車両周囲視野におけるバーチャルカメラ位置を定めることと、バーチャルカメラ位置および表示制御情報に基づいて、少なくとも1つの車両コンポーネントの図式表示を計算することとをさらに含み得る。例えば、表示制御情報が車両の窓のある開放角度を、例えば、「窓ガラスが半分まで引っ込んだ」と特定する場合には、車両周囲視野の車両モデルにおける窓の図式表示は、グラフィカルプロセッサにより計算され得る。半開き窓などの図式表示が車両周囲視野を表現するために用いられるカメラ位置に依存し得るため、この情報を正確に示す車両の図式表示モデルの計算において、表示制御情報を適宜に解釈する必要が生じ得る。
【0021】
特に、バーチャルカメラ位置の組み合わせは多数あり得、かつ種々の車両コンポーネントに関する多くの表示制御情報が与えられ得る。カメラ位置と表示制御情報との各組み合わせに応じた、例えば、画像データの形態である、一組みの所定の図式表示の提供よりもむしろ、毎回、表示制御情報とバーチャルカメラ位置とに基づいて車両コンポーネントの図式表示を計算することが有利となり得る。カメラ位置と表示制御情報との組み合わせに応じた、図式表示の保存が要求されない場合には、保存スペース要求が低減され得る。このような欠陥を克服するために、表示制御情報を解釈し、グラフィカル出力を計算するように構成された手段が備えられ得る。典型的なこのような手段は、表示制御情報を正確に解釈するように構成されたグラフィカルプロセッサである。
【0022】
さらに、車両周囲視野の表示は、少なくとも1つの車両コンポーネントの動的アニメーションを含み得る。例えば、車輪の旋回、方向指示器の発光、または窓ガラスの開閉の動画化が可能であり得る。車両モデルのこのような動的アニメーションが提供されると、ユーザは、車両周囲視野をより直観的に知覚することができる。より現実てきな車両周囲視野が提供される。動的に動画化された車両モデルは、車両周囲視野それ自体が提供する動的な周囲環境に適応するため、現実により即した車両周囲視野が提供される。背景移動と静的な車両モデルとの対比は回避され、それ故、ユーザが危険な注意散漫状態に陥る可能性がさらに低減される。
【0023】
特に、少なくとも1つの車両コンポーネントは、車輪、ハンドル、窓ガラス、フロントライト、テールランプ、サンルーフ、車体塗料、方向指示器、または自動車乗員を含む群から選択され得る。それらの車両コンポーネントに対する車両モデルの適応により、車両モデルは結果として、ユーザが実生活で知覚するような車両モデルとなり得る。例えば、ハンドルの回転角は、車両の現在の運転状況に従い適応し得る。車両が動いている時、車両周囲視野における背景が車両モデルに関連して移動する。車輪が車両速度に準じて回転すると、画像センサにより得られた車両モデルおよび背景は、直観的に知覚可能な表示をユーザに提供する。
【0024】
さらなる態様に従い、車両モデルを含む車両周囲視野を表示する光出力デバイスを制御するためのプロセッサを備えている車両周囲視野システムが提供される。プロセッサは、少なくとも1つの車両コンポーネントに関する表示制御情報を決定し、その表示制御情報に従い、車両モデルが少なくとも1つの車両コンポーネントの描写に適応するように車両周囲視野を表示する光出力デバイスを制御するように構成される。
【0025】
このような構造を有するシステムにおいて、対応する方法に関して説明した対応する効果が達成され得る。
【0026】
さらなる態様に従い、コンピュータ実行可能命令を含むコンピュータプログラムが提供される。この命令は、車両周囲視野システムのプロセッサにより実行されると、車両周囲視野システムに、態様または実施形態の方法を実行させる。
【0027】
プロセッサは、一態様または実施形態の方法を実行するように構成され得る。
【0028】
例えば、本願発明は以下の項目を提供する。
(項目1)
少なくとも1つの車両コンポーネント(10〜18)を備えている車両モデル(2)を含む車両周囲視野(1)を表示するための光出力デバイス(31)の制御方法であって、
上記少なくとも1つの車両コンポーネント(10〜18)に関する表示制御情報を決定することと、
上記車両モデル(2)が上記表示制御情報に従って上記少なくとも1つの車両コンポーネント(10〜18)の描写に適応するように、上記車両周囲視野(1)を表示するように上記光出力デバイス(31)を制御することと、を含む、方法。
(項目2)
上記少なくとも1つの車両コンポーネントの現在の動作状態を表す、上記少なくとも1つの車両コンポーネントに関する状態情報を受信することをさらに含み、上記表示制御情報は、少なくとも上記受信した状態情報に基づいて決定される、上記項目に記載の方法。
(項目3)
上記状態情報は、車輪回転速度、ハンドル角度、車両速度、ライトの動作状態、窓ガラス位置、サンルーフ位置の少なくとも1つを含む、上記項目のいずれか一項に記載の方法。
(項目4)
上記表示制御情報の上記決定を、状態情報の変化を検出した際に、長期にわたり繰り返す、上記項目のいずれか一項に記載の方法。
(項目5)
上記表示制御情報は、ユーザ入力によって取得されたユーザ構成データに少なくとも基づいて決定される、上記項目のいずれか一項に記載の方法。
(項目6)
上記ユーザ構成データはデータベースに保存される、上記項目のいずれか一項に記載の方法。
(項目7)
上記車両周囲視野(1)のバーチャルカメラ位置を定めることと、
上記バーチャルカメラ位置および上記表示制御情報に基づいて、上記少なくとも1つの車両コンポーネントの図式表示を計算することと、をさらに含む、上記項目のいずれか一項に記載の方法。
(項目8)
上記車両周囲視野(1)の表示は、上記少なくとも1つの車両コンポーネントの動的アニメーションを含む、上記項目のいずれか一項に記載の方法。
(項目9)
上記少なくとも1つの車両コンポーネントは、車輪(10)、ハンドル(17)、窓ガラス(16)、フロントライト(12)、テールランプ(18)、サンルーフ(11)、車体塗料(15)、方向指示器(13)、または自動車乗員(14)を含む群から選択される、上記項目のいずれか一項に記載の方法。
(項目10)
少なくとも1つの車両コンポーネント(10〜18)を備えている車両モデル(2)を含む車両周囲視野(1)を表示するための光出力デバイス(31)を制御するためのプロセッサであって、
上記少なくとも1つの車両コンポーネントに関する表示制御情報を決定し、
上記車両モデル(2)が上記表示制御情報に従って上記少なくとも1つの車両コンポーネントの描写に適応するように、上記車両周囲視野(1)を表示するように上記光出力デバイス(31)を制御することと、を含む、方法。
(項目11)
上記プロセッサは、上記項目のいずれか一項に従う方法を実行するように構成されている、上記項目に記載の車両周囲視野システム(3)。
【0029】
(摘要)
本発明は、車両モデル(2)を含む車両周囲視野(1)を表示するための光出力デバイスの制御方法に関するものである。この方法は、少なくとも1つの車両コンポーネント(10〜18)に関する表示制御情報を決定することと、その表示制御情報に従い、車両モデル(2)が少なくとも1つの車両コンポーネント(10〜18)の描写に適応するように車両周囲視野(1)を表示する光出力デバイスを制御することとを含む。
【図面の簡単な説明】
【0030】
本発明の実施形態を、添付図面を参照して以下により詳細に記載する。
【図1】車両周囲視野システムを示す概略図である。
【図2】車両周囲視野を示す概略図である。
【図3】車両コンポーネントに関する表示制御情報に基づいて、車両周囲視野を適応させる方法を示すフローチャートである。
【発明を実施するための形態】
【0031】
図1に車両周囲視野システム3の概略を示す。車両周囲視野システム3はプロセッサ30を備えている。プロセッサ30は、種々の車両コンポーネント32,34に関する表示制御情報を決定するように構成される。これは特に、車両周囲視野に含まれる車両モデルに適応するように光出力デバイス31を制御し、各表示制御情報に基づいて車両コンポーネント32,34を表現するようにさらに構成される。
【0032】
例えば、光出力デバイス31は、カーナビシステムまたは車両コンピュータの表示部でもよい。典型的には、最新のナビゲーションシステムは、ナビゲーションに関する情報よりもむしろ、車両周囲視野を表示するための、ある状況において用いられ得る表示部を備えている。また、光出力デバイスは、車両周囲視野システムそれ自体のみに用いられる表示部でもよい。
【0033】
表示制御情報は、車両コンポーネント32それ自体か、または車両コンポーネント34の動作状態を感知するセンサ33のいずれかから受信した状態情報に少なくとも一部が基づいて決定される。車両ライトが照射状態である状況では、車両コンポーネント32が状態情報を直接送信し得る。典型的には、「ライトオン」、「ライトオフ」、または「長距離におけるライトオン」などである車両ライトの状態に関する情報は、車両データバスに保存されている。次に、このような情報を直接用いて各表示制御情報を決定できる。さらに、車両コンポーネント34の現在の状態を決定するためのセンサ33が備えられ得る。例えば、センサは、ある座席に自動車乗員が居るか否かを感知し得る。センサ33は、トランクのふたまたは車両ドアの開閉状態を感知できる。センサは、車両ドアが開いていることを感知した場合には、各表示制御情報に適応し、車両周囲視野において車両ドアを同一の開放状態に表示する。別の車両コンポーネントに関する表示制御情報を決定するために、複数の車両コンポーネントから受信した状態情報を使用可能なことが当然ながら理解される。
【0034】
車両周囲視野システム3はさらに、ヒューマンインターフェースデバイス35を備えている。ヒューマンインターフェースデバイス35は、ユーザが、ユーザ構成データを通じて表示制御情報を設定可能なように適応する。例えば、ユーザは、ある車両コンポーネントの色、またはその有無を特定できる。ユーザはさらに、自動車乗員のある外観を特定できる。ユーザは、自動車乗員がユーザになじみ深い図式表示として表現されるように、特定の画像データを提供できる。さらに、車両の製造業者は、ユーザの要求に従う、種々の車両コンポーネントに関するユーザ構成データを設定できる。例えば、製造業者はユーザ構成データを特定し得、これにより、車両にある特徴が車両周囲視野の車両モデルにおいて適宜に表現される。このようなある特徴は、乗用車の色、ハッチバックもしくはリフトバックなどの車体のある形状、サンルーフの有無、車両後部ドアの有無などが含まれ得る。このような車両コンポーネントでは、適宜に適応したセンサが欠如し得るため、状態情報に基づいて表示制御情報を決定することが困難な場合がある。その結果、このようなユーザ構成データはデータベース36に保存される。データベース36により、長期にわたり繰り返しある車両コンポーネントに関する状態情報を全く受信しない場合でさえも、ユーザ構成データに基づいて表示構成データを決定できる。
【0035】
グラフィカルプロセッサ37は、プロセッサ30から得た表示制御情報を解釈するように適応し、表示制御情報に従う車両コンポーネントの図式表示を提供する。この適応は、正確な車両コンポーネントの図式表示を計算するための、車両周囲視野の視覚または他の特性を決定することを含む。通常では、種々のあり得る車両コンポーネントの表示制御情報と、種々のあり得る車両周囲視野の視角との組み合わせに起因して、車両モデルにおいて多くの種類の車両コンポーネントの図式表示が存在する可能性がある。このため、通常では、車両周囲視野システム3それ自体におけるそれらの組み合わせごとに図式表示を計算する必要がある。別の可能性として、表示制御情報と、視角などの車両周囲視野の形態とのある組み合わせに関する図式表示に関連するデータベースを備えることができる。データベースは画像データを含み、これを、表示制御情報に基づく車両コンポーネントの図式表示として用いることができる。
【0036】
図1に示す種々の構成要素は別々に記述したが、種々の構成要素が単一ユニットに一体化され得ることが当然ながら理解される。種々の構成要素は、ハードウェア、ソフトウェア、またはそれらの組み合わせとして実施され得る。
【0037】
図2に車両周囲視野の概略1を示す。特に、種々の車両コンポーネントを備えた車両モデル2が背景4に示される。背景4は、車両周囲に配置された画像センサにより取得される。通常では、車両が移動しているため、背景4は車両と共に移動する。それ故、背景4は車両モデル2の動的な周囲環境を構成する。車両モデル2は、種々の車両コンポーネントの特性を動的に表示するように適応する。例えば、車輪10は、図2に矢印で示すように、回転している状態で示される。さらに、車輪10の示す描写は、回転角を示すように適応する。図2では、車両モデル2は左折して駐車場に近づいている。それ故、図2では、前輪の組は左折を表す回転角を有するように適応する。さらに、フロントライト12が照射される。各表示制御情報が車両のフロントライトの照射を示す場合には、フロントライト12が照射されている。また、左方向指示器13が点滅する。車両ユーザが方向指示器のスイッチを入れると、各状態情報を受信し、各表示制御情報が適宜に決定される。図2に示す車両コンポーネントにはさらに、サンルーフ11、自動車乗員14、車体塗料15、窓ガラス16、ハンドル17、およびテールランプ18が含まれる。例えば、サンルーフ11は、車両にサンルーフ11が存在することを示している。製造業者またはユーザは、サンルーフが表現されるように、ユーザ構成データを通じて各表示制御情報を設定できる。さらに、サンルーフ11に関する表示制御情報は、その開放状態に関する情報を含む。サンルーフ11は、半開きとして、この表示制御情報に基づいて表現される。各々、自動車乗員14の存在は、各座席に備えられたいくつかのセンサのデータを通じて決定される。表示制御情報は自動車乗員の存在を表し、それ故、車両周囲視野に図式表示を提供する。特に、自動車乗員はユーザ定義方法により表示される。ユーザは、ユーザ構成データを生成可能な画像データを提供することにより、自動車乗員14を画像データに従い表示するような表示制御情報を決定できる。各動作および構造は、他の車両コンポーネントを表示する方法に適合する。
【0038】
図3に、車両コンポーネントに関する表示制御情報に基づいた、車両周囲視野を適応させる方法を説明するフローチャートを示す。この方法はステップ300から開始される。ステップ301において、ある車両コンポーネントに関するユーザ構成データを取得する。例えば、いくつかのヒューマンインターフェースデバイスを通じてユーザ構成データを取得できる。ユーザはグラフィカルインターフェースを備え得、これを用いて、ある車両コンポーネントに関するユーザ構成データを特定できる。このような車両コンポーネントは、車体塗料または車室の色でもよい。ユーザは彼の好みに従いパラメータを特定できる。ユーザはさらに、ユーザ構成データに基づいてある車両コンポーネントを個人化できる。例えば、ユーザは、このような画像データに基づいて自動車乗員を表現するためのいくつかの画像データを提供できる。
【0039】
さらに、ステップ301において、データベースからユーザ構成データを取得できる。データベースには、所定のユーザ構成データが供給される。このようなユーザ構成データは、例えば、車両の製造業者によりプリセットされ得る。車両の製造業者は、車体塗料それ自体に基づく色などのあるユーザ構成データを特定する。また、ユーザ構成データは、ある車両コンポーネントの有無またはその特徴に関する情報を含み得る。例えば、ある車両がサンルーフを備えている場合には、ユーザ構成データはサンルーフの存在を示す。
【0040】
ステップ302において、車両コンポーネントの状態情報を受信する。状態情報は、種々の車両コンポーネントの動作状態に関する情報を含む。このような状態情報は、例えば、車両速度、ハンドルの回転角、車両ライトのオン/オフ状態、窓ガラスの開放状態などを示し得る。
【0041】
ステップ303において、このような状態情報およびユーザ構成データに基づいて、表示制御情報を決定する。例えば、車両速度およびハンドル角度から、ハンドルの回転角に関する表示制御情報を決定する。窓ガラスの状態情報から、窓ガラスそれ自体に関する表示制御情報を決定する。ステップ303においてさらに、ある車両コンポーネント状態情報、例えば、自動車乗員の有無またはトランクのふたの開放状態に関するセンサのデータを用いて各表示制御情報を決定する。
【0042】
次に、テップ304において、車両周囲視野におけるバーチャルカメラ位置を定める。例えば、バーチャルカメラ位置は、ユーザにより特定され得るか、システムにより事前に定義され得る。ステップ303およびステップ304において、バーチャルカメラ位置および表示制御情報を決定および定めると、次に、車両モデルの図式表示を計算する。特に、表示制御情報は図式表示に関連し、転じて、バーチャルカメラ位置に応じて決まる。
【0043】
例えば、窓ガラスが若干開いている場合には、バーチャルカメラ位置次第で、窓は車両モデルにその状態とは違って表示され得る。バーチャルカメラが車両の真上に位置する場合には、車両周囲視野において窓ガラスの開放をほぼ視認することができない。しかしながら、バーチャルカメラが窓ガラスに直面するように正しく配置された場合には、若干開いている窓ガラスの位置を、図式表示においてより容易に視認できる。
【0044】
ステップ305において車両の図式表示モデルを計算すると、次に、ステップ306において、画像センサのデータを取得して処理する。これは、車両周囲視野の背景を提供する種々の画像センサが、車両周囲視野に図式表示を提供するために読み出されることを意味する。最後に、ステップ307において、車両周囲視野を表示するか、表示をリフレッシュして新たに計算した画像データを表示する。
【0045】
ステップ308において、ある車両コンポーネント状態情報が変化したか否かを確認する。この車両コンポーネント状態情報、例えば、表示制御情報の再決定、それ故、車両周囲視野の車両モデルの更新が必要となるある量によって変化を意味する。状態情報または状態情報における変化に関する閾値比較を実行する。状態情報又状態情報の変化の閾値比較ができうる。ステップ308において、状態情報がそれ相応に変化したことを決定した場合には、この方法はステップ302に継続する。ここで、車両コンポーネント状態情報を新たに受信し、これに基づいて、ステップ303において、表示制御情報を新たに決定する。しかしながら、ステップ308において、車両コンポーネント状態情報が変化していないか、その変化がわずかのみであることを決定した場合には、差し支え無くステップ306に継続する。ここで、画像センサのデータを新たに取得して処理することにより、背景を更新した図式表示を提供する。
【0046】
ユーザが最新の車両周囲視野をこれ以上必要としない場合には、図3に従う処理は終了する。
【0047】
本発明を、図面に示す実施形態に関連するさらなる詳細に関して記述したが、他の実施形態における変更が可能である。例えば、他の車両コンポーネントに関する表示制御情報を決定できる。
【特許請求の範囲】
【請求項1】
少なくとも1つの車両コンポーネント(10〜18)を備えている車両モデル(2)を含む車両周囲視野(1)を表示するための光出力デバイス(31)の制御方法であって、
前記少なくとも1つの車両コンポーネント(10〜18)に関する表示制御情報を決定することと、
前記車両モデル(2)が前記表示制御情報に従って前記少なくとも1つの車両コンポーネント(10〜18)の描写に適応するように、前記車両周囲視野(1)を表示するように前記光出力デバイス(31)を制御することと、を含む、方法。
【請求項2】
前記少なくとも1つの車両コンポーネントの現在の動作状態を表す、前記少なくとも1つの車両コンポーネントに関する状態情報を受信することをさらに含み、前記表示制御情報は、少なくとも前記受信した状態情報に基づいて決定される、請求項1に記載の方法。
【請求項3】
前記状態情報は、車輪回転速度、ハンドル角度、車両速度、ライトの動作状態、窓ガラス位置、サンルーフ位置の少なくとも1つを含む、請求項2に記載の方法。
【請求項4】
前記表示制御情報の前記決定を、状態情報の変化を検出した際に、長期にわたり繰り返す、請求項2または3のいずれか1項に記載の方法。
【請求項5】
前記表示制御情報は、ユーザ入力によって取得されたユーザ構成データに少なくとも基づいて決定される、前記請求項1〜4のいずれか1項に記載の方法。
【請求項6】
前記ユーザ構成データはデータベースに保存される、請求項5に記載の方法。
【請求項7】
前記車両周囲視野(1)のバーチャルカメラ位置を定めることと、
前記バーチャルカメラ位置および前記表示制御情報に基づいて、前記少なくとも1つの車両コンポーネントの図式表示を計算することと、をさらに含む、前記請求項1〜6のいずれか1項に記載の方法。
【請求項8】
前記車両周囲視野(1)の表示は、前記少なくとも1つの車両コンポーネントの動的アニメーションを含む、前記請求項1〜7のいずれか1項に記載の方法。
【請求項9】
前記少なくとも1つの車両コンポーネントは、車輪(10)、ハンドル(17)、窓ガラス(16)、フロントライト(12)、テールランプ(18)、サンルーフ(11)、車体塗料(15)、方向指示器(13)、または自動車乗員(14)を含む群から選択される、前記請求項1〜8のいずれか1項に記載の方法。
【請求項10】
少なくとも1つの車両コンポーネント(10〜18)を備えている車両モデル(2)を含む車両周囲視野(1)を表示するための光出力デバイス(31)を制御するためのプロセッサであって、
前記少なくとも1つの車両コンポーネントに関する表示制御情報を決定し、
前記車両モデル(2)が前記表示制御情報に従って前記少なくとも1つの車両コンポーネントの描写に適応するように、前記車両周囲視野(1)を表示するように前記光出力デバイス(31)を制御することと、を含む、方法。
【請求項11】
前記プロセッサは、請求項2〜9のいずれか1項に従う方法を実行するように構成されている、請求項10に記載の車両周囲視野システム(3)。
【請求項1】
少なくとも1つの車両コンポーネント(10〜18)を備えている車両モデル(2)を含む車両周囲視野(1)を表示するための光出力デバイス(31)の制御方法であって、
前記少なくとも1つの車両コンポーネント(10〜18)に関する表示制御情報を決定することと、
前記車両モデル(2)が前記表示制御情報に従って前記少なくとも1つの車両コンポーネント(10〜18)の描写に適応するように、前記車両周囲視野(1)を表示するように前記光出力デバイス(31)を制御することと、を含む、方法。
【請求項2】
前記少なくとも1つの車両コンポーネントの現在の動作状態を表す、前記少なくとも1つの車両コンポーネントに関する状態情報を受信することをさらに含み、前記表示制御情報は、少なくとも前記受信した状態情報に基づいて決定される、請求項1に記載の方法。
【請求項3】
前記状態情報は、車輪回転速度、ハンドル角度、車両速度、ライトの動作状態、窓ガラス位置、サンルーフ位置の少なくとも1つを含む、請求項2に記載の方法。
【請求項4】
前記表示制御情報の前記決定を、状態情報の変化を検出した際に、長期にわたり繰り返す、請求項2または3のいずれか1項に記載の方法。
【請求項5】
前記表示制御情報は、ユーザ入力によって取得されたユーザ構成データに少なくとも基づいて決定される、前記請求項1〜4のいずれか1項に記載の方法。
【請求項6】
前記ユーザ構成データはデータベースに保存される、請求項5に記載の方法。
【請求項7】
前記車両周囲視野(1)のバーチャルカメラ位置を定めることと、
前記バーチャルカメラ位置および前記表示制御情報に基づいて、前記少なくとも1つの車両コンポーネントの図式表示を計算することと、をさらに含む、前記請求項1〜6のいずれか1項に記載の方法。
【請求項8】
前記車両周囲視野(1)の表示は、前記少なくとも1つの車両コンポーネントの動的アニメーションを含む、前記請求項1〜7のいずれか1項に記載の方法。
【請求項9】
前記少なくとも1つの車両コンポーネントは、車輪(10)、ハンドル(17)、窓ガラス(16)、フロントライト(12)、テールランプ(18)、サンルーフ(11)、車体塗料(15)、方向指示器(13)、または自動車乗員(14)を含む群から選択される、前記請求項1〜8のいずれか1項に記載の方法。
【請求項10】
少なくとも1つの車両コンポーネント(10〜18)を備えている車両モデル(2)を含む車両周囲視野(1)を表示するための光出力デバイス(31)を制御するためのプロセッサであって、
前記少なくとも1つの車両コンポーネントに関する表示制御情報を決定し、
前記車両モデル(2)が前記表示制御情報に従って前記少なくとも1つの車両コンポーネントの描写に適応するように、前記車両周囲視野(1)を表示するように前記光出力デバイス(31)を制御することと、を含む、方法。
【請求項11】
前記プロセッサは、請求項2〜9のいずれか1項に従う方法を実行するように構成されている、請求項10に記載の車両周囲視野システム(3)。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−89245(P2013−89245A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−227095(P2012−227095)
【出願日】平成24年10月12日(2012.10.12)
【出願人】(504147933)ハーマン ベッカー オートモーティブ システムズ ゲーエムベーハー (165)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2012−227095(P2012−227095)
【出願日】平成24年10月12日(2012.10.12)
【出願人】(504147933)ハーマン ベッカー オートモーティブ システムズ ゲーエムベーハー (165)
【Fターム(参考)】
[ Back to top ]