
車両周辺撮影装置および車両周辺画像の処理方法
【課題】高精度に車両周辺の障害物を検出することができる車両周辺撮影技術を提供する。
【解決手段】車両の周辺の情景を撮影する第1カメラと、第1カメラの撮影範囲と部分的に重複する撮影範囲を撮影する第2カメラと、が車両に搭載されている。第1カメラと第2カメラとの一方を主カメラとするとともに他方を副カメラとし、主カメラにより撮影された画像を主撮影画像とするとともに副カメラにより撮影された画像を副撮影画像とする。視点変換部13は、副撮影画像を主カメラの視点位置から撮影された画像に視点変換した視点変換画像を生成する。画像差分部14は、比較情報として主撮影画像と視点変換画像との差分画像を生成する。
【解決手段】車両の周辺の情景を撮影する第1カメラと、第1カメラの撮影範囲と部分的に重複する撮影範囲を撮影する第2カメラと、が車両に搭載されている。第1カメラと第2カメラとの一方を主カメラとするとともに他方を副カメラとし、主カメラにより撮影された画像を主撮影画像とするとともに副カメラにより撮影された画像を副撮影画像とする。視点変換部13は、副撮影画像を主カメラの視点位置から撮影された画像に視点変換した視点変換画像を生成する。画像差分部14は、比較情報として主撮影画像と視点変換画像との差分画像を生成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両周辺の画像を撮影する技術、特に、撮影領域の一部が互いに重複するように車両に搭載された複数のカメラにより車両の周辺の情景を撮影する車両周辺撮影装置および、前記のカメラにより撮影された車両周辺画像の処理方法に関する。
【背景技術】
【0002】
近年、周辺の情景を撮影するカメラを搭載された車両が実用化されている。このような車両では、カメラにより撮影された画像を車室内に設けられたディスプレイに表示することにより、運転者は車両の周辺の障害物等を確認することができる。
【0003】
障害物等の存在をより運転者に認知させるために、画像から障害物を検出する技術が提案されている。例えば、特許文献1から3の技術では、撮影範囲が部分的に重複する複数台の撮像装置によって撮像された画像を仮想視点から見た鳥瞰図画像に変換し、それぞれの鳥瞰図画像間の差分を求めることにより、差分領域(障害物が存在する領域)を検出している。
【0004】
特許文献1の技術では、鳥瞰図画像を合成する際に、上述のようにして検出された差分領域に対しては一の鳥瞰図画像の画素値を用いることにより、合成された鳥瞰図画像において障害物の二重表示、および、障害物の消失を防止している。
【0005】
一方、特許文献2の技術では、上述のようにして検出された差分領域に基づいて、障害物をよりよく撮影しているカメラを選択し、鳥瞰図画像を合成する際に、その選択されたカメラの鳥瞰図画像を優先的に使用している。これにより、運転者が障害物を視認しやすい鳥瞰図画像を合成することができる。
【0006】
他方、特許文献3の技術では、障害物が存在する差分領域を他の領域と区別するように表示することにより、運転者が障害物を視認しやすくしている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2008−048317号公報
【特許文献2】特開2008−048345号公報
【特許文献3】特開2008−085710号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述のように、特許文献1から3の技術では、撮影範囲が重複する撮像装置によって撮影された画像を鳥瞰図画像に変換し、それらを差分処理することにより障害物を検知している。しかしながら、鳥瞰図画像を生成するためには補間処理等が必要であり、補間処理がなされた領域では鮮鋭度が低下する等の画像劣化が生じる。そのため、鳥瞰図画像間の差分を算出すると、劣化した画像間で差分を算出することとなり、障害物の検出精度が低下するおそれがある。
【0009】
本発明は上記課題に鑑みてなされたものであり、その目的は、高精度に車両周辺の障害物を検出することができる車両周辺撮影技術を提供することである。
【課題を解決するための手段】
【0010】
上記課題を解決するため、本発明の車両周辺撮影装置は、車両に搭載され、当該車両の周辺の情景を撮影する第1カメラと、前記車両に搭載され、前記第1カメラの撮影範囲と部分的に重複する撮影範囲を撮影する第2カメラと、前記第1カメラと前記第2カメラとの一方を主カメラとするとともに他方を副カメラとし、当該主カメラにより撮影された画像を主撮影画像とするとともに当該副カメラにより撮影された画像を副撮影画像として、当該副撮影画像を当該主カメラの視点位置から撮影された画像に視点変換した視点変換画像を生成する視点変換部と、前記主撮影画像と前記視点変換画像とを比較した比較情報を生成する画像情報比較部、とを備えている。
【0011】
この構成では、撮影範囲の一部が重複する第1カメラと第2カメラとにより車両周辺の情景が撮影される。そのため、重複した撮影範囲に障害物があれば、これらの画像を同じカメラの視点位置から撮影された画像に視点変換し、それらを比較することにより生成した比較情報(例えば、差分画像)を生成すると、障害物はそのような差分画像中で優位な画素値を有する領域として表される。上述したように、特許文献1から3では、両方の画像を、車両上方に光軸が鉛直下向きに設定された仮想的なカメラにより撮影された画像に視点変換し、それらの画像の差分を算出していた。これに対して、本発明では、一方の画像(主撮影画像)は視点変換を行わずに、他方の画像(副撮影画像)のみを主撮影画像を撮影したカメラ(主カメラ)の視点から撮影した画像に視点変換し、それらの比較を行っている。そのため、視点変換による歪は副撮影画像にのみ生じ、歪による障害物検出精度の低下を抑制することができる。
【0012】
本発明の車両周辺撮影装置の好適な実施形態の一つでは、前記主撮影画像からエッジを抽出したエッジ画像を生成するエッジ抽出部と、前記比較情報としての差分画像と前記エッジ画像との画素値に論理積を施した積画像を生成し、当該積画像を出力画像として出力する積画像生成部と、を備えている。
【0013】
この構成では、視点変換が施されない主撮影画像からエッジを抽出したエッジ画像を生成し、そのエッジ画像と比較情報としての差分画像との論理積を施した積画像を生成している。そのため、積画像中で優位な画素値(真値)を有する領域は、差分画像中で優位な画素値を有する領域であり、主撮影画像中で明確なエッジを有している領域の輪郭となる。すなわち、この構成では、差分画像により検出することができる障害物の領域をエッジという情報により検証を行っている。これにより、障害物の検出精度を向上させることができる。
【0014】
本発明の車両周辺撮影装置の好適な実施形態の一つでは、前記主撮影画像を領域分割する領域分割部と、前記領域分割された各々の領域と前記積画像において真値を有する領域との類似性に基づいて障害物の領域を抽出した障害物画像を生成し、前記積画像に代えて当該障害物画像を前記出力画像として出力する障害物画像生成部と、を備えている。
【0015】
上述したように、積画像において優位な値(真値)を有している領域は障害物の輪郭である。本構成では、この障害物の輪郭領域と主撮影画像中の領域分割された領域との類似性に基づいて、障害物の領域を抽出している。すなわち、本構成では、積画像に含まれる障害物の輪郭である可能性のある領域に対して、領域分割結果の領域の特徴量という情報により検証を行っている。これにより、障害物の検出精度を向上させることができる。
【0016】
本発明の車両周辺撮影装置の好適な実施形態の一つでは、前記第1カメラを前記主カメラとして前記出力画像を第1出力画像として生成するとともに、前記第2カメラを前記主カメラとして前記出力画像を第2出力画像として生成し、前記第1出力画像と前記第2出力画像とに基づいて障害物を示す画素を所定の画素値に設定した画像を出力画像として出力する。
【0017】
この構成では、視点変換されない第1カメラにより撮影された画像と視点変換された第2カメラにより撮影された画像とに基づいて上記処理により得られる第1出力画像と、視点変換された第1カメラにより撮影された画像と視点変換されない第2カメラにより撮影された画像とに基づいて上記処理により得られる第2出力画像と、を統合した画像を出力画像としている。すなわち、この構成では、主撮影画像と副撮影画像とを入れ換えた2つの処理結果を統合して出力画像とすることにより、出力画像に含まれる障害物の領域をダブルチェックしている。これにより、視点変換により生じる歪に起因する障害物の誤検出を低減し、障害物の検出精度を向上させることができる。
【0018】
また、上記課題を解決するため、本発明の車両周辺画像の処理方法は、車両に搭載され、当該車両の周辺の情景を撮影する第1カメラから撮影画像を取得するステップと、前記車両に搭載され、前記第1カメラの撮影範囲と部分的に重複する撮影範囲を撮影する第2カメラから撮影画像を取得するステップと、前記第1カメラと前記第2カメラとの一方を主カメラとするとともに他方を副カメラとし、当該主カメラにより撮影された前記撮影画像を主撮影画像とするとともに当該副カメラにより撮影された前記撮影画像を副撮影画像として、当該副撮影画像を当該主カメラの視点位置から撮影された画像に視点変換した視点変換画像を生成するステップと、前記主撮影画像と前記視点変換画像とを比較した比較情報を生成するステップと、を備えている。当然ながら、このような車両周辺画像の処理方法にも、上述した車両周辺画像撮影装置の付加的特徴を適用することができる。
【図面の簡単な説明】
【0019】
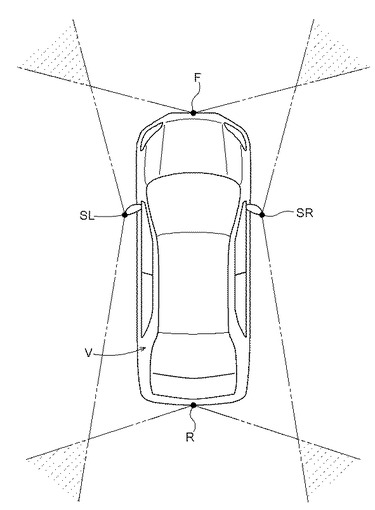
【図1】本発明の車両周辺撮影装置を搭載した車両の平面図である。
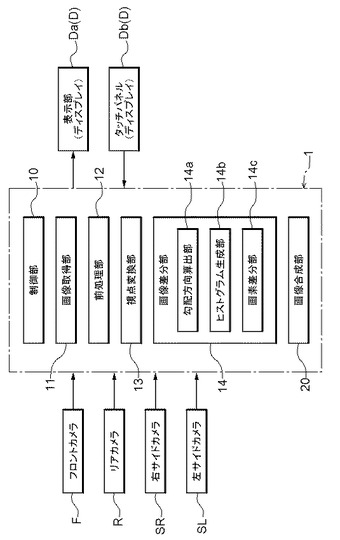
【図2】実施例1における車両周辺撮影装置の機能ブロック図である。
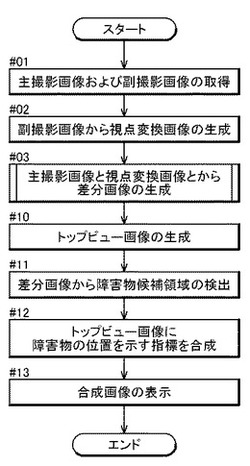
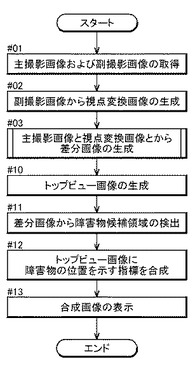
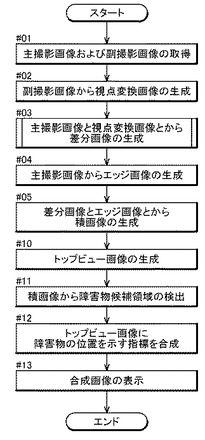
【図3】実施例1における車両周辺撮影装置の処理の流れを表すフローチャートである。
【図4】画像間差分の処理の流れを表すフローチャートである。
【図5】フロントカメラの撮影画像と左サイドカメラの撮影画像をフロントカメラの視点位置から撮影した画像に視点変換した視点変換画像の例である。
【図6】第1画像と第2画像の視点変換画像との差分画像の例である。
【図7】実施例1における表示画像の例である。
【図8】実施例2における車両周辺撮影装置の機能ブロック図である。
【図9】実施例2における車両周辺撮影装置の処理の流れを表すフローチャートである。
【図10】第1画像のエッジ画像と図6の差分画像とから生成した積画像の例である。
【図11】実施例2における表示画像の例である。
【図12】実施例3における車両周辺撮影装置の機能ブロック図である。
【図13】実施例3における車両周辺撮影装置の処理の流れを表すフローチャートである。
【図14】実施例3における障害物画像生成部の処理の流れを表すフローチャートである。
【図15】実施例4の処理を実施例1に適用した場合の処理の流れを模式的に表すである。
【図16】実施例4の処理を実施例2に適用した場合の処理の流れを模式的に表すである。
【図17】実施例4の処理を実施例3に適用した場合の処理の流れを模式的に表すである。
【発明を実施するための形態】
【実施例1】
【0020】
以下に、図面を用いて本発明の車両周辺撮影装置の実施形態を説明する。図1は本発明の車両周辺撮影装置を搭載した車両Vの平面図である。本実施形態の車両Vは、前方,後方,右方および左方をそれぞれ撮影するフロントカメラF,リアカメラR,右サイドカメラSR,左サイドカメラSLを備えている。なお、特にこれらを区別する必要がない場合は、カメラCと総称する。
【0021】
カメラCは、車両Vの周辺の情景、特に、車両Vの周囲に存在する立体物である障害物を撮影可能に設置されている。そのため、カメラCは、その光軸が水平よりも少し下方に向くように設置されている。
【0022】
また、カメラCは広角レンズを備えており、隣接するカメラCの撮影範囲は互いに部分的に重複している。図1には、カメラCとともにその撮影範囲および撮影範囲が重複する領域(ハッチング部分)を示している。例えば、フロントカメラFの撮影範囲と右サイドカメラSRの撮影範囲とは車両Vの右前方において重複している。すなわち、フロントカメラFおよび右サイドカメラSRはいずれも、車両Vの右前方を撮影することができる。
【0023】
なお、フロントカメラFと右サイドカメラSR、右サイドカメラSRとリアカメラR、リアカメラRと左サイドカメラSL、左サイドカメラSLとフロントカメラFのそれぞれの組み合わせが本発明の第1カメラと第2カメラとなる。なお、第1カメラと第2カメラとは入れ換えても構わない。
【0024】
本実施形態では、カメラCは、CCD(charge coupled device)やCIS(CMOS image sensor)などの撮像素子を用いて、毎秒15〜30フレームの2次元画像を撮影し、デジタル変換して動画データを出力するデジタルカメラを用いている。
【0025】
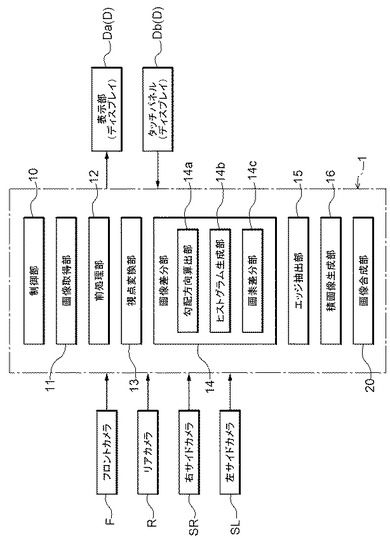
また、図2に示すように、車両Vの車内には各種表示を行うディスプレイDが備えられている。本実施例では、ディスプレイDは、ナビゲーションシステムのモニタ装置を兼用している。そのため、ディスプレイDは、表示部Daおよび表示部Da上に形成されたタッチパネルDbを有している。表示部Daは液晶ディスプレイによって構成することができ、タッチパネルDbは、表示部Daと共に形成され、指などによる接触位置をロケーションデータとして出力することができる感圧式や静電式の指示入力装置により構成することができる。
【0026】
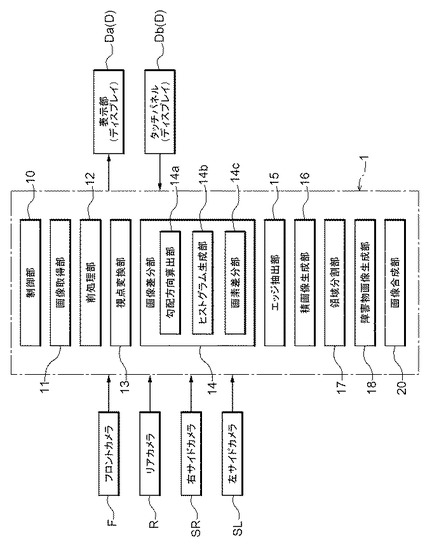
図2は、本実施例における車両周辺撮影装置のシステム構成図である。本実施例における車両周辺撮影装置は、CPU(central processing unit)を中核としてメモリ、その他の周辺回路と共に構成されたECU(electronic control unit)1を備えている。当然ながら、CPUに代えて、DSP(digital signal processor)など、他の論理演算プロセッサや論理回路を中核として構成しても構わない。
【0027】
カメラCにより撮影された車両Vの周辺の情景はこのECU1に入力される。また、ECU1は、各種情報やカメラCによって撮影された撮影画像や撮影画像を処理した画像等を表示部Daに表示したり、運転者がタッチパネルDbを操作した情報を取得したりする機能を備えている。
【0028】
また、ECU1は車内ネットワーク(図示せず)を介して種々のシステムやセンサと通信可能に接続されている。車内ネットワークとしてはCAN(controller area network)を用いることができる。
【0029】
図に示すように、ECU1は、制御部10と、カメラCによって撮影された撮影画像を取得する画像取得部11と、取得した撮影画像に前処理を施す前処理部12と、撮影画像を任意の視点から撮影された画像に視点変換した視点変換画像を生成する視点変換部13と、画像間の差分を算出する画像差分部14(本発明の画像情報比較部の例)と、各カメラCにより撮影された画像を合成する画像合成部20と、を備えている。なお、これらの機能部は、ソフトウェアとCPUとが協働することにより実現されているが、ハードウェアを用いて実現しても構わない。
【0030】
制御部10は、ECU1に構成されている各機能部全体の処理の流れの制御をはじめとして、各種制御を行う。
【0031】
画像取得部11は、フロントカメラF,リアカメラR,右サイドカメラSR,左サイドカメラSLのそれぞれから画像を取得する。なお、上述したように、本実施形態のカメラCは撮影画像としてデジタル動画を出力するものであるため、画像取得部11はカメラCから取得した動画から1フレームを抽出して静止画像(以下、画像と略称する)を生成する。このとき、全てのカメラCの動画から同じタイムフレームを抽出することが望ましい。
【0032】
前処理部12は、取得した画像に対して前処理を施す。本実施形態では、前処理として平滑化処理を施しており、これにより、路面のアスファルト等のざらつきによる障害物の誤検出を抑制している。平滑化処理は、Gaussianフィルタ等の公知の方法を用いることができる。また、前処理部12では必要に応じて他の画像処理を行っても構わない。
【0033】
視点変換部13は、画像の視点変換を行い、視点変換画像を生成する。例えば、カメラCにより撮影された画像を、車両Vの上方に鉛直下向きの視点を有する仮想的なカメラから撮影された画像(以下、トップビュー画像と称する)に変換したり、一のカメラCにより撮影された画像を他のカメラCの視点位置から撮影された画像に視点変換したりする。後者の場合には、例えば、左サイドカメラSLにより撮影された画像をフロントカメラFの視点位置から撮影された画像に視点変換する。なお、視点変換は、公知の方法を用いることができる。
【0034】
画像差分部14は、2つの画像間の差分を算出し、差分画像(本発明の比較画像の例)を生成する。差分の方法は、画素値、特に、輝度値の差の絶対値や正規化自己相関等を用いることができるが、本実施形態では、各画素位置における画素値の勾配方向のヒストグラム(以下、HOG(Histgrams of Oriented Gradients)と称する)を用いた差分を行っている。そのため、画像差分部14は、画像の各画素位置における画素値の勾配方向を算出する勾配方向算出部14a、画像の各画素位置におけるHOGを算出するヒストグラム生成部14b、2つの画像の各画素位置におけるHOGに基づいて、その画素位置における差分値を算出する画素差分部14cを備えている。なお、本実施形態では、比較情報として差分画像を用いているが、比較情報はこれに限定されるものではない。例えば、注目画素の周囲領域の輝度の類似度(NCC,SAD等)を比較情報とすることもできる。
【0035】
勾配方向算出部14aは、画像を構成する各画素の画素位置における画素値の勾配方向を算出する。なお、本実施形態では、画素値として輝度値を用い、カメラCがカラーカメラの場合には、前処理部12において画像をモノクロ変換しておく。例えば、画素位置(x,y)における画素値をf(x,y)とすると、画素位置(x,y)におけるx方向の変化量ΔxはΔx=2f(x+1,y)−2f(x−1,y)、y方向における変化量ΔyはΔy=2f(x,y+1)−2f(x,y−1)と表すことができ、勾配角度θはθ=tan―1(Δy/Δx)となる。ただし、この算出方法では、実際の勾配方向がθであるかθ+πであるかが不明である。そのため、本実施形態では、Δxが正の場合のθ(−π/2<θ<π/2)を4段階に符号化した値を勾配方向するとともに、Δxが負の場合のθ(−π/2≦θ≦π/2)を4段階に符号化した値を勾配方向としている。具体的には、0≦θ<π/4およびπ/4≦θ<π/2のそれぞれに対して符号(勾配方向)0,1を割り当て、−π/2<θ≦−π/4および−π/4<θ<0のそれぞれに対して勾配方向6,7を割り当てる。そして、Δxが負の場合には、(勾配方向+4)mod8を勾配方向とする。ここで、「mod」は剰余を算出する演算子である。これにより、算出された勾配角度θは8段階の勾配方向に符号化される。なお、ΔxおよびΔyがともに0の場合には、無方向(=8)としている。したがって、本実施形態では、勾配方向は、無方向と、8つの方向(有方向)とのいずれかである。
【0036】
ヒストグラム生成部14bは、勾配方向算出部14aにより算出された勾配方向に基づいて、画像の各画素位置におけるHOGを求める。具体的には、注目画素の周囲に領域(以下、ヒストグラム生成領域と称する)を設定し、そのヒストグラム生成領域に含まれる各画素の画素位置における勾配方向を取得し、勾配方向毎の度数を積算する。この度数分布が注目画素の画素位置におけるHOGとなる。注目画素を走査することにより、画像の各画素位置におけるHOGを求めることができる。なお、本実施形態では、ヒストグラム生成領域は、注目画素を中心とする5×5の大きさとしているが、ヒストグラム生成領域の設定は適宜変更可能である。
【0037】
画素差分部14cは、2つの画像の各画素位置におけるHOGに基づいて、その画素位置における差分値(以下、画素差分値と称する)を算出する。具体的には、第1の画像の差分対象となる画素(以下、差分対象画素と称する)の画素位置におけるHOGと第2の画像の差分対象画素の画素位置におけるHOGとの差異を求めて、その差分対象画素の画素位置における画素差分値とする。なお、HOGどうしの差異は、各勾配方向における度数の差の絶対値和を用いることができる。すなわち、勾配方向をi(=0〜8)、第1の画像および第2の画像の差分対象画素の画素位置におけるHOGをそれぞれHOG1,HOG2とし、HOGの勾配方向iの度数をHOG[i]とすると、差分対象画素の画素位置における画素差分値dは、
【数1】

と表すことができる。
【0038】
画像差分部14は、画素差分部14cに対して、画像の各画素を順次差分対象画素として設定することにより、全画素位置における画素差分値を取得し、2つの画像間の差分を求める。
【0039】
画像合成部20は、各カメラCにより撮影された画像を合成した合成画像を生成する。
【0040】
以下に、図3のフローチャートを用いて本実施例における車両周辺撮影装置の処理の流れを説明する。なお、以下の説明では、フロントカメラFを本発明の第1カメラおよび主カメラ、左サイドカメラSLを本発明の第2カメラおよび副カメラとした場合のみを説明するが、他のカメラCについても同様の処理が行われる。
【0041】
本実施形態では、運転者がタッチパネルDbを操作して、車両周辺撮影装置の作動を明示的に指示した場合に以下の処理が実行されるが、車両Vに搭載されている各種センサ等の出力に基づいて、制御部10が処理を実行するか否かを判断する構成としても構わない。
【0042】
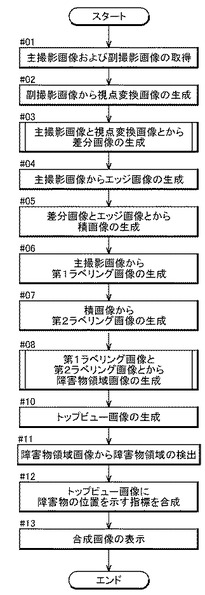
まず、運転者がタッチパネルDbを操作して、車両周辺撮影装置の作動を指示すると、その指示は制御部10により取得され、指示を取得した制御部10は、画像取得部11に対して画像を取得する旨の指示を送る。これに対して、画像取得部11は主カメラおよび副カメラから画像を取得する(#01)。取得された画像はそれぞれ主撮影画像および副撮影画像としてメモリ(図示せず)に記憶される。
【0043】
画像の取得が完了すると、制御部10は、視点変換部13に対して、副撮影画像を主カメラの視点から撮影した画像に視点変換するよう指示を送る。これに対して、視点変換部13は、公知の方法により、副撮影画像から視点変換画像を生成する(#02)。生成された視点変換画像は、メモリに記憶される。なお、各カメラCの視点位置(車両座標系中におけるカメラ原点の座標および光軸方向)または、視点変換のための変換テーブルは予めメモリ等に記録されており、視点変換処理に用いられる。
【0044】
視点変換画像の生成が完了すると、制御部10は、画像差分部14に対して、主撮影画像と視点変換画像との差分を算出するように指示を送る。これに対して、画像差分部14は主撮影画像と視点変換画像との差分を算出する(#03)。本実施例では、主撮影画像と視点変換画像との差分結果は、各画素位置における画素差分値を画素値とする差分画像として出力し、メモリに記憶される。
【0045】
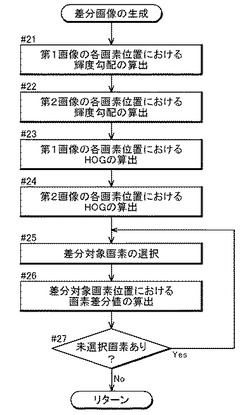
図4は本実施形態における画像間差分の処理の流れを表すフローチャートである。ここでは、画像間差分を行う2つの画像を第1画像および第2画像と称する。まず、勾配方向算出部14aは、上述の方法により、第1画像および第2画像の各画素位置における輝度値の勾配方向を算出し、2次元配列形式でメモリに記憶する(#21,#22)。
【0046】
次に、ヒストグラム生成部14bは、上述の処理により算出した各画素位置における勾配方向を用いて、上述の処理により、第1画像および第2画像の各画素位置におけるHOGを算出する(#23,#24)。各画素位置におけるHOGは9の要素を持つ1次元配列であるため、算出された全画素位置におけるHOGは3次元配列形式でメモリに記憶される。
【0047】
画像差分部14は、第1画像から順次1つの画素を差分対象画素として選択し、画素差分部14cに対して差分対象画素の画素位置における画素差分値を算出するよう指示を送る。
【0048】
具体的には、まず、画像差分部14は第1画像から位置の画素を差分対象画素として選択する(#25)。選択された差分対象画素の画素位置は画像差分部14から画素差分部14c送られる。差分対象画素の画素位置を取得した画素差分部14cは、メモリから第1画像の差分対象画素の画素位置におけるHOGと第2画像の差分対象画素の画素位置におけるHOGとを取得し、上述の式(1)により画素差分値dを算出する(#26)。算出された画素差分値dは画像差分部14に送られる。
【0049】
画像差分部14は、メモリ上に画素差分値を記憶するための2次元配列を確保しておき、その2次元配列の差分対象画素の画素位置に対応する位置に取得した画素差分値dを記憶させる。
【0050】
上述の処理が完了すると、画像差分部14は未処理、すなわち、差分対象画素として選択していない画素の有無を判定し(#27)、未処理画素が存在すれば(#27のYes分岐)、処理を#25に移行して上述の処理を繰り返す。
【0051】
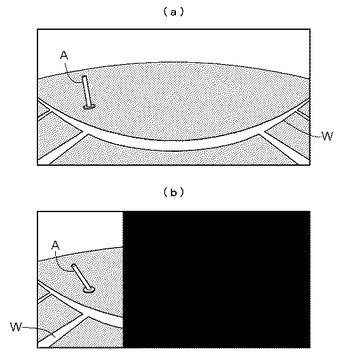
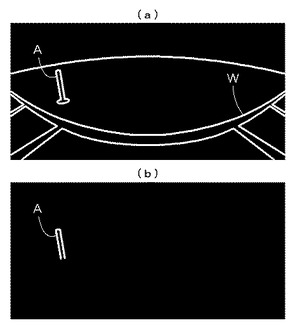
図5(a)および(b)に、主撮影画像としてのフロントカメラFにより撮影された画像と、副撮影画像としての左サイドカメラSLにより撮影された画像をフロントカメラFの視点位置から撮影された画像に視点変換した視点変換画像の例を示す。また、図6は図5(a)の画像と図5(b)の画像との差分画像である。なお、図5(b)の視点変換画像は、図5(a)と位置合せを行った後、図5(a)と重複する部分のみをクリッピングしたものである。図に示すように、主撮影画像および視点変換画像には白線Wと障害物Aとが含まれている。また、図5から明らかなように、主撮影画像中の白線Wと視点変換画像中の白線Wとは、略同じ位置となっている。したがって、主撮影画像と視点変換画像との画像間差分をとると、図6に示すように、白線Wに対応する領域では優位な画素差分値は算出されない。一方、図6に示すように、障害物Aに対応する領域、特に、障害物Aの上部に対応する領域では優位な画素差分値が算出される。したがって、差分画像内に優位な画素差分値を有する領域があるか否かを判定すれば、車両Vの周辺に障害物が存在するか否かを判定することができる。
【0052】
この差分画像を運転者に提示することにより、運転者は車両Vの周辺に存在する障害物の有無を判断することはできるが、より運転者の判断が容易になるように、本実施形態では、表示部Daにトップビュー画像を表示し、その画像中に障害物を示す指標を重畳表示している。
【0053】
そのため、差分画像が生成されると、制御部10は、画像合成部20に対して、トップビュー画像の生成、および、トップビュー画像に障害物を示す指標を重畳させるよう指示を送る。これに対して、画像合成部20は、視点変換部12を用いて、各カメラCの撮影画像および差分画像をトップビュー画像に視点変換する(#10)。なお、差分画像は主撮影画像を基準として生成されたものであるため、主撮影画像と同じ視点変換処理を受ける。
【0054】
また、画像合成部20は差分画像から障害物を検出する(#11)。上述したように、障害物は差分画像中で優位な画素値を有する領域である。そのため、差分画像に対して2値化および領域分割を施せば、障害物の領域が検出できる。また、差分画像に対してエッジ抽出および2値化を施せば、障害物の輪郭を抽出することができる。画像合成部20は、このようにして障害物を検出し、上述の処理により合成したトップビュー画像に対して、障害物の位置を示す指標を合成する(#12)。このようにして生成された画像はメモリに記憶され、制御部10の指示によって表示部Daに表示される(#13)。
【0055】
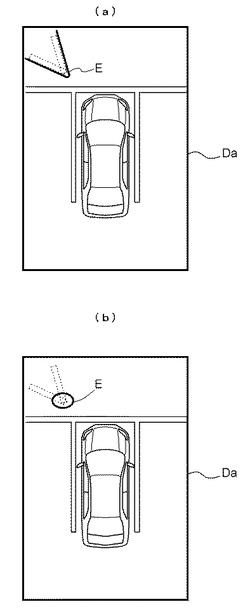
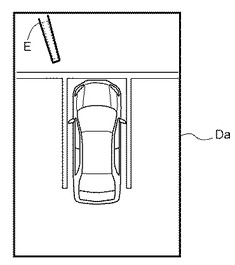
図7は上述の処理によって表示部Daに表示される表示画像の例である。図7(a)では、トップビュー画像に対して障害物Aの輪郭を表す指標Eを合成している。一方、図7(b)では、トップビュー画像に対して障害物Aの路面との接地位置を示す指標Eを合成している。なお、この例では、トップビュー画像を合成する際に、フロントカメラFの撮影範囲と左サイドカメラSLの撮影範囲との重複する範囲は双方の画像を合成しているため、障害物Aの形状は実際の形状とは異なっている。
【実施例2】
【0056】
図8は本実施例における車両周辺撮影装置の機能ブロック図である。なお、実施例1と同様の機能部に対しては実施例1と同じ符号を付しており、詳細な説明は省略する。本実施例の車両周辺撮影装置は、画像のエッジ抽出を行うエッジ抽出部15、2つの画像に対して論理積を施した積画像を生成する積画像生成部16を備えている点において実施例1と異なっている。
【0057】
エッジ抽出部15は、画像からエッジ抽出を行う。エッジの抽出は、CannyアルゴリズムやSobelオペレータ等の公知の方法を用いることができる。なお、Sobelオペレータを使用すると実際のエッジの両側にエッジが検出されるため、膨張処理および細線化処理を施しておくことが望ましい。
【0058】
積画像生成部16は、2つの画像において対応する画素位置の画素値の論理積を算出し、その論理積の値を画素値とする積画像を生成する。なお、本発明における論理積とは一般的な論理積の概念を拡張したものであり、第1の画素値および第2の画素値がともに優位な値(例えば、閾値よりも大きい値)を有している場合にこれらの論理積が優位な値(固定値であっても、所定の値よりも大きい値であっても構わない)となり、それ以外の場合にはこれらの論理積は劣位(例えば、閾値以下の場合)な値となるものである。したがって、2つの画像がともに2値画像であれば本発明における論理積は一般的なandオペレータとなる。
【0059】
一方、画像が多値の場合には次のようにして論理積を算出することができる。例えば、真値を1(優位な値)、偽値を0(劣位な値)とし、第1の画素値をp1、第2の画素値をp2とすると、第1の画素値p1と第2の画素値p2との論理積は(p1>TH1)&(p2>TH2)なる論理演算の結果とすることができる。この場合、第1の画素値p1が閾値TH1よりも大きく、かつ、第2の画素値p2が閾値TH2よりも大きい、すなわち、両方の画素値が優位な値である場合にのみ、上述の論理演算の結果は真値となる。この場合には、積画像は2値画像となる。なお、閾値TH1と閾値TH2とは同じ値であっても構わないし、異なる値であっても構わない。また、閾値TH1と閾値TH2とは固定値であっても構わないし、大津の判別分析法等の方法等によって画像の画素値の分布に応じて定められた値であっても構わない。
【0060】
このように、論理積の概念を拡張することにより、画像を予め2値化することなく、画像間の論理積を算出することができる。そのため、2値画像を記憶するためのメモリが不要となり、車両周辺撮影装置のメモリ容量が小さい場合には有利となる。
【0061】
図9は本実施例における画像周辺撮影装置の処理の流れを表すフローチャートである。なお、#01から#03、および、#10〜#13までの処理は実施例1と同様であるため、詳細な説明は省略する。
【0062】
制御部10は、差分画像の生成が完了すると、エッジ抽出部15に対して主撮影画像のエッジ抽出を行うよう指示を送る。エッジ抽出部15はこの指示を受けて、主撮影画像に対してCannyアルゴリズムを適用してエッジ画像を生成する(#04)。なお、本実施形態では、エッジ抽出部15は、生成されたエッジ画像に対して膨張処理を施している。このようにして生成されたエッジ画像(2値画像)はメモリに記憶される。なお、本実施例におけるエッジ画像では、エッジ画素の画素値を1(優位な値)、非エッジ画素の画素値を0(劣位な値)としている。
【0063】
制御部10は、エッジ画像の生成が完了すると、積画像生成部16に対して、差分画像と主撮影画像のエッジ画像とから積画像を生成するよう指示を送る。この指示を受けた積画像生成部16は、上述の処理により積画像を生成する(#05)。なお、本実施例では、差分画像が多値画像、エッジ画像が2値画像であるため、差分画像の画素値をp1、エッジ画像の画素値をp2とすると、論理演算式は(p1>TH1)&p2となる。このようにして生成された積画像はメモリに記憶される。
【0064】
制御部10は、積画像の生成が完了すると、画像合成部20に対して合成画像の生成を指示し、生成された合成画像を表示部Daに表示する(#10〜#13)。なお、実施例1では#11の処理において差分画像から障害物を検出したが、本実施例では差分画像から障害物の領域を抽出することに代えて、積画像において真値を有する領域を障害物の領域とする。
【0065】
図10(a)は第1画像のエッジ画像の例であり、エッジ画像には主撮影画像における障害物の輪郭や路面の白線等の輪郭が含まれている。図10(b)はこのエッジ画像と図6の差分画像とから生成した積画像の例である。図から明らかなように、積画像には白線等の領域が含まれておらず、差分画像では正確に検出されていなかった障害物の輪郭形状がより正確に検出されている。したがって、この障害物の輪郭形状を用いれば、図11に示すように、正確な障害物Aの輪郭形状を示す指標Eを合成したトップビュー画像を合成することができる。
【0066】
本実施例では、このように、主撮影画像のエッジと差分画像との積画像に基づいて障害物の領域を抽出している。そのため、本実施例によれば、実施例1において誤検出された障害物の領域であって、障害物の輪郭付近にない領域を除外することができる。そのため、実施例1に比べて、より高精度な障害物の領域の抽出を行うことができる。
【実施例3】
【0067】
図12は本実施例における画像周辺撮影装置の機能ブロック図である。なお、実施例2と同様の機能部に対しては実施例2と同じ符号を付しており、詳細な説明は省略する。本実施例の車両周辺撮影装置は、画像に対して領域分割処理を施す領域分割部17、障害物画像生成部18を備えている。
【0068】
領域分割部17は、画像の画素値(RGB値等のカラー値であっても輝度値であっても構わない)に基づいて領域分割処理を行い、ラベリング画像を生成する。なお、ラベリング画像とは、領域分割処理において同じ領域に属すると判定された画素に同じ画素値(ラベル値)を付与した画像である。領域分割は、グラフカット、Mean−Shift等の公知の手法を用いることができる。
【0069】
障害物画像生成部18は、領域分割された各々の領域と積画像において真値を有する領域との類似性に基づいて障害物の領域を抽出した障害物画像を生成する。なお、障害物画像とは、障害物であると判定された領域に属する画素の画素値を真値とした画像である。
【0070】
上述したように、積画像において真値を有する領域は障害物の輪郭形状を表している。したがって、障害物画像生成部18は、領域分割された各々の領域と、積画像に表されている輪郭との類似性に基づいて障害物の領域を求めている。なお、領域と輪郭との類似性の尺度は様々なものを利用することができる。例えば、比較対象の輪郭と、比較対象の領域の輪郭との一致性や、比較対象の輪郭により囲まれた領域と比較対象の領域との一致性等を用いることができる。
【0071】
図13は本実施例における画像周辺撮影装置の処理の流れを表すフローチャートである。なお、#01から#05、および、#10〜#13までの処理は実施例2と同様であるため、詳細な説明は省略する。
【0072】
制御部10は、積画像の生成が完了すると、領域分割部17に対して、主撮影画像および積画像の領域分割を行うよう指示を送る。指示を受けた領域分割部17は主撮影画像を領域分割し、第1ラベリング画像を生成する(#06)。また、積画像を領域分割し、第2ラベリング画像を生成する(#07)。これらのラベリング画像はメモリに記憶される。
【0073】
制御部10は、領域分割が完了すると、障害物画像生成部18に対して障害物画像を生成するよう指示を送る。指示を受けた障害物画像生成部18は、障害物画像を生成し、メモリに記憶する(#08)。
【0074】
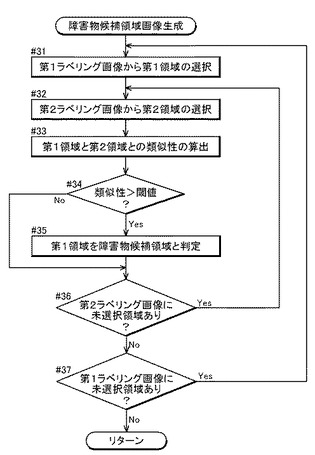
図14は、障害物画像生成処理の流れを表すフローチャートである。まず、第1ラベリング画像から一の領域(以下、第1領域と称する)を選択する(#31)。また、第2ラベリング画像から一の領域(以下、第2領域と称する)を選択する(#32)。そして、第1領域と第2領域との類似性を算出する(#33)。このとき、使用する類似性の尺度に応じて第1領域および第2領域の特徴量の算出が行われる。なお、予め領域の特徴量を求めておき、メモリに記憶させておいても構わない。
【0075】
算出された類似性が所定の閾値よりも大きければ(#34のYes分岐)、第1領域を障害物の領域とし、メモリ上に確保された障害物領域画像用の2次元配列の第1領域に対応する画素値に真値を代入する(#35)。
【0076】
第2ラベリング画像において未処理の領域が存在すれば(#36のYes分岐)、処理を#32に移行させ、上述の処理を繰り返す。一方、第2ラベリング画像において未処理の領域が存在しなければ(#36のNo分岐)、第1ラベリング画像において未処理の領域が存在するか否かが判定され(#37)、未処理の領域が存在すれば(#37のYes分岐)、処理を#31に移行させ、上述の処理が繰り返される。
【0077】
本実施例では、このように、主撮影画像の各領域と積画像において真値を有する領域、すなわち、実施例2で障害物として抽出された領域との類似性に基づいて、障害物の領域を抽出している。そのため、本実施例によれば、実施例2において誤検出された障害物の領域であって、主撮影画像の領域と整合しない形状等を有する領域を除外することができる。そのため、実施例2に比べて、より高精度な障害物の領域の抽出を行うことができる。
【実施例4】
【0078】
上述の実施例1から実施例3では、第1カメラ(上述の実施例では、フロントカメラF)を主カメラ、第2カメラ(上述の実施例では、左サイドカメラSL)を副カメラとして処理を行った。これに対して、本実施例では、第1カメラを主カメラ、第2カメラを副カメラとした処理結果(出力画像)と、第1カメラを副カメラ,第2カメラを主カメラとした処理結果(出力画像)とを統合した結果を出力する。なお、処理結果の統合は、例えば、両方の処理結果において、障害物の領域が対応する位置になければ、処理結果から除外する。これにより、障害物の領域の障害物としての確からしさがダブルチェックされ、抽出精度を高めることができる。なお、両方の処理結果における障害物の領域の位置の対応関係は主カメラと副カメラとの姿勢に基づいて検証することができる。また、視点変換等の誤差により、両方の処理結果における障害物の領域は完全に対応する位置とはならない可能性がある。その場合には、車両Vに近い側の障害物の領域を使用することが望ましい。
【0079】
〔実施例1への適用〕
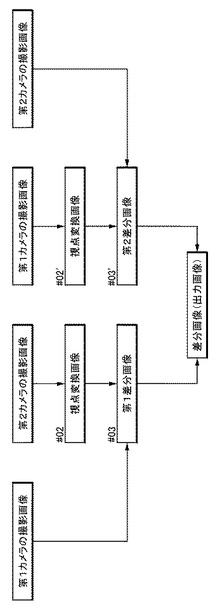
図15は本実施例の処理を実施例1の処理に適用した場合の処理の流れを模式的に表す図である。まず、実施例1と同様に第1カメラを主カメラ、第2カメラを副カメラとして、差分画像(以下、第1差分画像と称する)の生成を行う(#02〜#03)。また、第2カメラを主カメラ、第1カメラを副カメラとして、差分画像(以下、第2差分画像と称する)の生成を行う(#02’〜#03’)。そして、第1差分画像と第2差分画像とを統合して出力画像としての差分画像を生成する。
【0080】
〔実施例2への適用〕
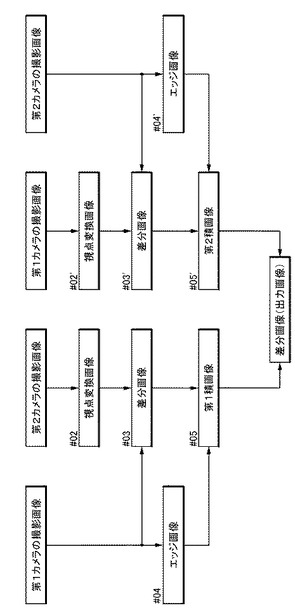
実施例2の処理において、実施例1の処理により生成された差分画像に代えて、図15の処理により生成された差分画像(出力画像)を用いても構わない。また、図16に模式的に示す処理を行っても構わない。まず、実施例2と同様に第1カメラを主カメラ、第2カメラを副カメラとして、積画像(以下、第1積画像と称する)の生成を行う(#02〜#05)。また、第2カメラを主カメラ、第1カメラを副カメラとして、積画像(以下、第2積画像と称する)の生成を行う(#02’〜#05’)。そして、第1積画像と第2積画像とを統合して出力画像としての積画像を生成する。また、この図16の処理における差分画像の生成処理を図15の処理に置き換えても構わない。
【0081】
〔実施例3への適用〕
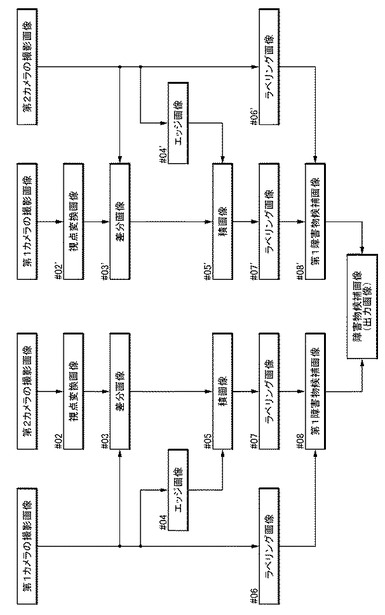
実施例3の処理において、実施例2の処理により生成された積画像に代えて、図16の処理により生成された積画像(出力画像)を用いても構わない。また、図17に模式的に示す処理を行っても構わない。まず、実施例3と同様に第1カメラを主カメラ、第2カメラを副カメラとして、障害物画像(以下、第1障害物画像と称する)の生成を行う(#02〜#08)。また、第2カメラを主カメラ、第1カメラを副カメラとして、障害物画像(以下、第2障害物画像と称する)の生成を行う(#02’〜#08’)。そして、第1障害物画像と第2障害物画像とを統合して出力画像としての障害物画像を生成する。また、この図17の処理における差分画像の生成処理を図15の処理に置き換えても構わないし、積画像の生成処理を図16の処理に置き換えても構わない。
【0082】
〔別実施形態〕
(1)上述の実施形態では、4つのカメラCの撮影画像を合成したトップビュー画像を生成してディスプレイに表示する構成としたが、一部のカメラCの撮影画像を用いた表示を行う構成としても構わない。この場合には、車両Vに搭載されている様々なセンサ等の出力に基づいて使用するカメラを選択する構成とすることもできる。例えば、ステアリングの操舵角を検出するステアリングセンサの出力とシフトレバーの操作位置を検出するシフトレバーセンサの出力とに基づいて車両Vの進行方向を判定し、その進行方向側のカメラCの撮影画像を用いた表示を行う構成とすることができる。具体的には、ステアリングセンサの操舵角が左方向であり、シフトレバーセンサの出力が後進(=R)の場合には、車両Vの進行方向は左後方であるため、左サイドカメラSLとリアカメラRとの撮影画像を用いた表示を行う。
【0083】
(2)また、撮影画像を合成せずに、各々のカメラCにより撮影された画像をそのまま表示しても構わない。なお、この場合にも障害物を示す指標Eを重畳させることが望ましい。
【産業上の利用可能性】
【0084】
本発明は、撮影領域の一部が互いに重複するように車両に搭載された複数のカメラにより車両の周辺の情景を撮影する車両周辺撮影技術に適用することができる。
【符号の説明】
【0085】
C:カメラ
F:フロントカメラ
R:リアカメラ
SR:右サイドカメラ
SL:左サイドカメラ
13:視点変換部
14:画像差分部(画像情報比較部)
15:エッジ抽出部
16:積画像生成部
17:領域分割部
18:障害物画像生成部
【技術分野】
【0001】
本発明は、車両周辺の画像を撮影する技術、特に、撮影領域の一部が互いに重複するように車両に搭載された複数のカメラにより車両の周辺の情景を撮影する車両周辺撮影装置および、前記のカメラにより撮影された車両周辺画像の処理方法に関する。
【背景技術】
【0002】
近年、周辺の情景を撮影するカメラを搭載された車両が実用化されている。このような車両では、カメラにより撮影された画像を車室内に設けられたディスプレイに表示することにより、運転者は車両の周辺の障害物等を確認することができる。
【0003】
障害物等の存在をより運転者に認知させるために、画像から障害物を検出する技術が提案されている。例えば、特許文献1から3の技術では、撮影範囲が部分的に重複する複数台の撮像装置によって撮像された画像を仮想視点から見た鳥瞰図画像に変換し、それぞれの鳥瞰図画像間の差分を求めることにより、差分領域(障害物が存在する領域)を検出している。
【0004】
特許文献1の技術では、鳥瞰図画像を合成する際に、上述のようにして検出された差分領域に対しては一の鳥瞰図画像の画素値を用いることにより、合成された鳥瞰図画像において障害物の二重表示、および、障害物の消失を防止している。
【0005】
一方、特許文献2の技術では、上述のようにして検出された差分領域に基づいて、障害物をよりよく撮影しているカメラを選択し、鳥瞰図画像を合成する際に、その選択されたカメラの鳥瞰図画像を優先的に使用している。これにより、運転者が障害物を視認しやすい鳥瞰図画像を合成することができる。
【0006】
他方、特許文献3の技術では、障害物が存在する差分領域を他の領域と区別するように表示することにより、運転者が障害物を視認しやすくしている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2008−048317号公報
【特許文献2】特開2008−048345号公報
【特許文献3】特開2008−085710号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述のように、特許文献1から3の技術では、撮影範囲が重複する撮像装置によって撮影された画像を鳥瞰図画像に変換し、それらを差分処理することにより障害物を検知している。しかしながら、鳥瞰図画像を生成するためには補間処理等が必要であり、補間処理がなされた領域では鮮鋭度が低下する等の画像劣化が生じる。そのため、鳥瞰図画像間の差分を算出すると、劣化した画像間で差分を算出することとなり、障害物の検出精度が低下するおそれがある。
【0009】
本発明は上記課題に鑑みてなされたものであり、その目的は、高精度に車両周辺の障害物を検出することができる車両周辺撮影技術を提供することである。
【課題を解決するための手段】
【0010】
上記課題を解決するため、本発明の車両周辺撮影装置は、車両に搭載され、当該車両の周辺の情景を撮影する第1カメラと、前記車両に搭載され、前記第1カメラの撮影範囲と部分的に重複する撮影範囲を撮影する第2カメラと、前記第1カメラと前記第2カメラとの一方を主カメラとするとともに他方を副カメラとし、当該主カメラにより撮影された画像を主撮影画像とするとともに当該副カメラにより撮影された画像を副撮影画像として、当該副撮影画像を当該主カメラの視点位置から撮影された画像に視点変換した視点変換画像を生成する視点変換部と、前記主撮影画像と前記視点変換画像とを比較した比較情報を生成する画像情報比較部、とを備えている。
【0011】
この構成では、撮影範囲の一部が重複する第1カメラと第2カメラとにより車両周辺の情景が撮影される。そのため、重複した撮影範囲に障害物があれば、これらの画像を同じカメラの視点位置から撮影された画像に視点変換し、それらを比較することにより生成した比較情報(例えば、差分画像)を生成すると、障害物はそのような差分画像中で優位な画素値を有する領域として表される。上述したように、特許文献1から3では、両方の画像を、車両上方に光軸が鉛直下向きに設定された仮想的なカメラにより撮影された画像に視点変換し、それらの画像の差分を算出していた。これに対して、本発明では、一方の画像(主撮影画像)は視点変換を行わずに、他方の画像(副撮影画像)のみを主撮影画像を撮影したカメラ(主カメラ)の視点から撮影した画像に視点変換し、それらの比較を行っている。そのため、視点変換による歪は副撮影画像にのみ生じ、歪による障害物検出精度の低下を抑制することができる。
【0012】
本発明の車両周辺撮影装置の好適な実施形態の一つでは、前記主撮影画像からエッジを抽出したエッジ画像を生成するエッジ抽出部と、前記比較情報としての差分画像と前記エッジ画像との画素値に論理積を施した積画像を生成し、当該積画像を出力画像として出力する積画像生成部と、を備えている。
【0013】
この構成では、視点変換が施されない主撮影画像からエッジを抽出したエッジ画像を生成し、そのエッジ画像と比較情報としての差分画像との論理積を施した積画像を生成している。そのため、積画像中で優位な画素値(真値)を有する領域は、差分画像中で優位な画素値を有する領域であり、主撮影画像中で明確なエッジを有している領域の輪郭となる。すなわち、この構成では、差分画像により検出することができる障害物の領域をエッジという情報により検証を行っている。これにより、障害物の検出精度を向上させることができる。
【0014】
本発明の車両周辺撮影装置の好適な実施形態の一つでは、前記主撮影画像を領域分割する領域分割部と、前記領域分割された各々の領域と前記積画像において真値を有する領域との類似性に基づいて障害物の領域を抽出した障害物画像を生成し、前記積画像に代えて当該障害物画像を前記出力画像として出力する障害物画像生成部と、を備えている。
【0015】
上述したように、積画像において優位な値(真値)を有している領域は障害物の輪郭である。本構成では、この障害物の輪郭領域と主撮影画像中の領域分割された領域との類似性に基づいて、障害物の領域を抽出している。すなわち、本構成では、積画像に含まれる障害物の輪郭である可能性のある領域に対して、領域分割結果の領域の特徴量という情報により検証を行っている。これにより、障害物の検出精度を向上させることができる。
【0016】
本発明の車両周辺撮影装置の好適な実施形態の一つでは、前記第1カメラを前記主カメラとして前記出力画像を第1出力画像として生成するとともに、前記第2カメラを前記主カメラとして前記出力画像を第2出力画像として生成し、前記第1出力画像と前記第2出力画像とに基づいて障害物を示す画素を所定の画素値に設定した画像を出力画像として出力する。
【0017】
この構成では、視点変換されない第1カメラにより撮影された画像と視点変換された第2カメラにより撮影された画像とに基づいて上記処理により得られる第1出力画像と、視点変換された第1カメラにより撮影された画像と視点変換されない第2カメラにより撮影された画像とに基づいて上記処理により得られる第2出力画像と、を統合した画像を出力画像としている。すなわち、この構成では、主撮影画像と副撮影画像とを入れ換えた2つの処理結果を統合して出力画像とすることにより、出力画像に含まれる障害物の領域をダブルチェックしている。これにより、視点変換により生じる歪に起因する障害物の誤検出を低減し、障害物の検出精度を向上させることができる。
【0018】
また、上記課題を解決するため、本発明の車両周辺画像の処理方法は、車両に搭載され、当該車両の周辺の情景を撮影する第1カメラから撮影画像を取得するステップと、前記車両に搭載され、前記第1カメラの撮影範囲と部分的に重複する撮影範囲を撮影する第2カメラから撮影画像を取得するステップと、前記第1カメラと前記第2カメラとの一方を主カメラとするとともに他方を副カメラとし、当該主カメラにより撮影された前記撮影画像を主撮影画像とするとともに当該副カメラにより撮影された前記撮影画像を副撮影画像として、当該副撮影画像を当該主カメラの視点位置から撮影された画像に視点変換した視点変換画像を生成するステップと、前記主撮影画像と前記視点変換画像とを比較した比較情報を生成するステップと、を備えている。当然ながら、このような車両周辺画像の処理方法にも、上述した車両周辺画像撮影装置の付加的特徴を適用することができる。
【図面の簡単な説明】
【0019】
【図1】本発明の車両周辺撮影装置を搭載した車両の平面図である。
【図2】実施例1における車両周辺撮影装置の機能ブロック図である。
【図3】実施例1における車両周辺撮影装置の処理の流れを表すフローチャートである。
【図4】画像間差分の処理の流れを表すフローチャートである。
【図5】フロントカメラの撮影画像と左サイドカメラの撮影画像をフロントカメラの視点位置から撮影した画像に視点変換した視点変換画像の例である。
【図6】第1画像と第2画像の視点変換画像との差分画像の例である。
【図7】実施例1における表示画像の例である。
【図8】実施例2における車両周辺撮影装置の機能ブロック図である。
【図9】実施例2における車両周辺撮影装置の処理の流れを表すフローチャートである。
【図10】第1画像のエッジ画像と図6の差分画像とから生成した積画像の例である。
【図11】実施例2における表示画像の例である。
【図12】実施例3における車両周辺撮影装置の機能ブロック図である。
【図13】実施例3における車両周辺撮影装置の処理の流れを表すフローチャートである。
【図14】実施例3における障害物画像生成部の処理の流れを表すフローチャートである。
【図15】実施例4の処理を実施例1に適用した場合の処理の流れを模式的に表すである。
【図16】実施例4の処理を実施例2に適用した場合の処理の流れを模式的に表すである。
【図17】実施例4の処理を実施例3に適用した場合の処理の流れを模式的に表すである。
【発明を実施するための形態】
【実施例1】
【0020】
以下に、図面を用いて本発明の車両周辺撮影装置の実施形態を説明する。図1は本発明の車両周辺撮影装置を搭載した車両Vの平面図である。本実施形態の車両Vは、前方,後方,右方および左方をそれぞれ撮影するフロントカメラF,リアカメラR,右サイドカメラSR,左サイドカメラSLを備えている。なお、特にこれらを区別する必要がない場合は、カメラCと総称する。
【0021】
カメラCは、車両Vの周辺の情景、特に、車両Vの周囲に存在する立体物である障害物を撮影可能に設置されている。そのため、カメラCは、その光軸が水平よりも少し下方に向くように設置されている。
【0022】
また、カメラCは広角レンズを備えており、隣接するカメラCの撮影範囲は互いに部分的に重複している。図1には、カメラCとともにその撮影範囲および撮影範囲が重複する領域(ハッチング部分)を示している。例えば、フロントカメラFの撮影範囲と右サイドカメラSRの撮影範囲とは車両Vの右前方において重複している。すなわち、フロントカメラFおよび右サイドカメラSRはいずれも、車両Vの右前方を撮影することができる。
【0023】
なお、フロントカメラFと右サイドカメラSR、右サイドカメラSRとリアカメラR、リアカメラRと左サイドカメラSL、左サイドカメラSLとフロントカメラFのそれぞれの組み合わせが本発明の第1カメラと第2カメラとなる。なお、第1カメラと第2カメラとは入れ換えても構わない。
【0024】
本実施形態では、カメラCは、CCD(charge coupled device)やCIS(CMOS image sensor)などの撮像素子を用いて、毎秒15〜30フレームの2次元画像を撮影し、デジタル変換して動画データを出力するデジタルカメラを用いている。
【0025】
また、図2に示すように、車両Vの車内には各種表示を行うディスプレイDが備えられている。本実施例では、ディスプレイDは、ナビゲーションシステムのモニタ装置を兼用している。そのため、ディスプレイDは、表示部Daおよび表示部Da上に形成されたタッチパネルDbを有している。表示部Daは液晶ディスプレイによって構成することができ、タッチパネルDbは、表示部Daと共に形成され、指などによる接触位置をロケーションデータとして出力することができる感圧式や静電式の指示入力装置により構成することができる。
【0026】
図2は、本実施例における車両周辺撮影装置のシステム構成図である。本実施例における車両周辺撮影装置は、CPU(central processing unit)を中核としてメモリ、その他の周辺回路と共に構成されたECU(electronic control unit)1を備えている。当然ながら、CPUに代えて、DSP(digital signal processor)など、他の論理演算プロセッサや論理回路を中核として構成しても構わない。
【0027】
カメラCにより撮影された車両Vの周辺の情景はこのECU1に入力される。また、ECU1は、各種情報やカメラCによって撮影された撮影画像や撮影画像を処理した画像等を表示部Daに表示したり、運転者がタッチパネルDbを操作した情報を取得したりする機能を備えている。
【0028】
また、ECU1は車内ネットワーク(図示せず)を介して種々のシステムやセンサと通信可能に接続されている。車内ネットワークとしてはCAN(controller area network)を用いることができる。
【0029】
図に示すように、ECU1は、制御部10と、カメラCによって撮影された撮影画像を取得する画像取得部11と、取得した撮影画像に前処理を施す前処理部12と、撮影画像を任意の視点から撮影された画像に視点変換した視点変換画像を生成する視点変換部13と、画像間の差分を算出する画像差分部14(本発明の画像情報比較部の例)と、各カメラCにより撮影された画像を合成する画像合成部20と、を備えている。なお、これらの機能部は、ソフトウェアとCPUとが協働することにより実現されているが、ハードウェアを用いて実現しても構わない。
【0030】
制御部10は、ECU1に構成されている各機能部全体の処理の流れの制御をはじめとして、各種制御を行う。
【0031】
画像取得部11は、フロントカメラF,リアカメラR,右サイドカメラSR,左サイドカメラSLのそれぞれから画像を取得する。なお、上述したように、本実施形態のカメラCは撮影画像としてデジタル動画を出力するものであるため、画像取得部11はカメラCから取得した動画から1フレームを抽出して静止画像(以下、画像と略称する)を生成する。このとき、全てのカメラCの動画から同じタイムフレームを抽出することが望ましい。
【0032】
前処理部12は、取得した画像に対して前処理を施す。本実施形態では、前処理として平滑化処理を施しており、これにより、路面のアスファルト等のざらつきによる障害物の誤検出を抑制している。平滑化処理は、Gaussianフィルタ等の公知の方法を用いることができる。また、前処理部12では必要に応じて他の画像処理を行っても構わない。
【0033】
視点変換部13は、画像の視点変換を行い、視点変換画像を生成する。例えば、カメラCにより撮影された画像を、車両Vの上方に鉛直下向きの視点を有する仮想的なカメラから撮影された画像(以下、トップビュー画像と称する)に変換したり、一のカメラCにより撮影された画像を他のカメラCの視点位置から撮影された画像に視点変換したりする。後者の場合には、例えば、左サイドカメラSLにより撮影された画像をフロントカメラFの視点位置から撮影された画像に視点変換する。なお、視点変換は、公知の方法を用いることができる。
【0034】
画像差分部14は、2つの画像間の差分を算出し、差分画像(本発明の比較画像の例)を生成する。差分の方法は、画素値、特に、輝度値の差の絶対値や正規化自己相関等を用いることができるが、本実施形態では、各画素位置における画素値の勾配方向のヒストグラム(以下、HOG(Histgrams of Oriented Gradients)と称する)を用いた差分を行っている。そのため、画像差分部14は、画像の各画素位置における画素値の勾配方向を算出する勾配方向算出部14a、画像の各画素位置におけるHOGを算出するヒストグラム生成部14b、2つの画像の各画素位置におけるHOGに基づいて、その画素位置における差分値を算出する画素差分部14cを備えている。なお、本実施形態では、比較情報として差分画像を用いているが、比較情報はこれに限定されるものではない。例えば、注目画素の周囲領域の輝度の類似度(NCC,SAD等)を比較情報とすることもできる。
【0035】
勾配方向算出部14aは、画像を構成する各画素の画素位置における画素値の勾配方向を算出する。なお、本実施形態では、画素値として輝度値を用い、カメラCがカラーカメラの場合には、前処理部12において画像をモノクロ変換しておく。例えば、画素位置(x,y)における画素値をf(x,y)とすると、画素位置(x,y)におけるx方向の変化量ΔxはΔx=2f(x+1,y)−2f(x−1,y)、y方向における変化量ΔyはΔy=2f(x,y+1)−2f(x,y−1)と表すことができ、勾配角度θはθ=tan―1(Δy/Δx)となる。ただし、この算出方法では、実際の勾配方向がθであるかθ+πであるかが不明である。そのため、本実施形態では、Δxが正の場合のθ(−π/2<θ<π/2)を4段階に符号化した値を勾配方向するとともに、Δxが負の場合のθ(−π/2≦θ≦π/2)を4段階に符号化した値を勾配方向としている。具体的には、0≦θ<π/4およびπ/4≦θ<π/2のそれぞれに対して符号(勾配方向)0,1を割り当て、−π/2<θ≦−π/4および−π/4<θ<0のそれぞれに対して勾配方向6,7を割り当てる。そして、Δxが負の場合には、(勾配方向+4)mod8を勾配方向とする。ここで、「mod」は剰余を算出する演算子である。これにより、算出された勾配角度θは8段階の勾配方向に符号化される。なお、ΔxおよびΔyがともに0の場合には、無方向(=8)としている。したがって、本実施形態では、勾配方向は、無方向と、8つの方向(有方向)とのいずれかである。
【0036】
ヒストグラム生成部14bは、勾配方向算出部14aにより算出された勾配方向に基づいて、画像の各画素位置におけるHOGを求める。具体的には、注目画素の周囲に領域(以下、ヒストグラム生成領域と称する)を設定し、そのヒストグラム生成領域に含まれる各画素の画素位置における勾配方向を取得し、勾配方向毎の度数を積算する。この度数分布が注目画素の画素位置におけるHOGとなる。注目画素を走査することにより、画像の各画素位置におけるHOGを求めることができる。なお、本実施形態では、ヒストグラム生成領域は、注目画素を中心とする5×5の大きさとしているが、ヒストグラム生成領域の設定は適宜変更可能である。
【0037】
画素差分部14cは、2つの画像の各画素位置におけるHOGに基づいて、その画素位置における差分値(以下、画素差分値と称する)を算出する。具体的には、第1の画像の差分対象となる画素(以下、差分対象画素と称する)の画素位置におけるHOGと第2の画像の差分対象画素の画素位置におけるHOGとの差異を求めて、その差分対象画素の画素位置における画素差分値とする。なお、HOGどうしの差異は、各勾配方向における度数の差の絶対値和を用いることができる。すなわち、勾配方向をi(=0〜8)、第1の画像および第2の画像の差分対象画素の画素位置におけるHOGをそれぞれHOG1,HOG2とし、HOGの勾配方向iの度数をHOG[i]とすると、差分対象画素の画素位置における画素差分値dは、
【数1】
と表すことができる。
【0038】
画像差分部14は、画素差分部14cに対して、画像の各画素を順次差分対象画素として設定することにより、全画素位置における画素差分値を取得し、2つの画像間の差分を求める。
【0039】
画像合成部20は、各カメラCにより撮影された画像を合成した合成画像を生成する。
【0040】
以下に、図3のフローチャートを用いて本実施例における車両周辺撮影装置の処理の流れを説明する。なお、以下の説明では、フロントカメラFを本発明の第1カメラおよび主カメラ、左サイドカメラSLを本発明の第2カメラおよび副カメラとした場合のみを説明するが、他のカメラCについても同様の処理が行われる。
【0041】
本実施形態では、運転者がタッチパネルDbを操作して、車両周辺撮影装置の作動を明示的に指示した場合に以下の処理が実行されるが、車両Vに搭載されている各種センサ等の出力に基づいて、制御部10が処理を実行するか否かを判断する構成としても構わない。
【0042】
まず、運転者がタッチパネルDbを操作して、車両周辺撮影装置の作動を指示すると、その指示は制御部10により取得され、指示を取得した制御部10は、画像取得部11に対して画像を取得する旨の指示を送る。これに対して、画像取得部11は主カメラおよび副カメラから画像を取得する(#01)。取得された画像はそれぞれ主撮影画像および副撮影画像としてメモリ(図示せず)に記憶される。
【0043】
画像の取得が完了すると、制御部10は、視点変換部13に対して、副撮影画像を主カメラの視点から撮影した画像に視点変換するよう指示を送る。これに対して、視点変換部13は、公知の方法により、副撮影画像から視点変換画像を生成する(#02)。生成された視点変換画像は、メモリに記憶される。なお、各カメラCの視点位置(車両座標系中におけるカメラ原点の座標および光軸方向)または、視点変換のための変換テーブルは予めメモリ等に記録されており、視点変換処理に用いられる。
【0044】
視点変換画像の生成が完了すると、制御部10は、画像差分部14に対して、主撮影画像と視点変換画像との差分を算出するように指示を送る。これに対して、画像差分部14は主撮影画像と視点変換画像との差分を算出する(#03)。本実施例では、主撮影画像と視点変換画像との差分結果は、各画素位置における画素差分値を画素値とする差分画像として出力し、メモリに記憶される。
【0045】
図4は本実施形態における画像間差分の処理の流れを表すフローチャートである。ここでは、画像間差分を行う2つの画像を第1画像および第2画像と称する。まず、勾配方向算出部14aは、上述の方法により、第1画像および第2画像の各画素位置における輝度値の勾配方向を算出し、2次元配列形式でメモリに記憶する(#21,#22)。
【0046】
次に、ヒストグラム生成部14bは、上述の処理により算出した各画素位置における勾配方向を用いて、上述の処理により、第1画像および第2画像の各画素位置におけるHOGを算出する(#23,#24)。各画素位置におけるHOGは9の要素を持つ1次元配列であるため、算出された全画素位置におけるHOGは3次元配列形式でメモリに記憶される。
【0047】
画像差分部14は、第1画像から順次1つの画素を差分対象画素として選択し、画素差分部14cに対して差分対象画素の画素位置における画素差分値を算出するよう指示を送る。
【0048】
具体的には、まず、画像差分部14は第1画像から位置の画素を差分対象画素として選択する(#25)。選択された差分対象画素の画素位置は画像差分部14から画素差分部14c送られる。差分対象画素の画素位置を取得した画素差分部14cは、メモリから第1画像の差分対象画素の画素位置におけるHOGと第2画像の差分対象画素の画素位置におけるHOGとを取得し、上述の式(1)により画素差分値dを算出する(#26)。算出された画素差分値dは画像差分部14に送られる。
【0049】
画像差分部14は、メモリ上に画素差分値を記憶するための2次元配列を確保しておき、その2次元配列の差分対象画素の画素位置に対応する位置に取得した画素差分値dを記憶させる。
【0050】
上述の処理が完了すると、画像差分部14は未処理、すなわち、差分対象画素として選択していない画素の有無を判定し(#27)、未処理画素が存在すれば(#27のYes分岐)、処理を#25に移行して上述の処理を繰り返す。
【0051】
図5(a)および(b)に、主撮影画像としてのフロントカメラFにより撮影された画像と、副撮影画像としての左サイドカメラSLにより撮影された画像をフロントカメラFの視点位置から撮影された画像に視点変換した視点変換画像の例を示す。また、図6は図5(a)の画像と図5(b)の画像との差分画像である。なお、図5(b)の視点変換画像は、図5(a)と位置合せを行った後、図5(a)と重複する部分のみをクリッピングしたものである。図に示すように、主撮影画像および視点変換画像には白線Wと障害物Aとが含まれている。また、図5から明らかなように、主撮影画像中の白線Wと視点変換画像中の白線Wとは、略同じ位置となっている。したがって、主撮影画像と視点変換画像との画像間差分をとると、図6に示すように、白線Wに対応する領域では優位な画素差分値は算出されない。一方、図6に示すように、障害物Aに対応する領域、特に、障害物Aの上部に対応する領域では優位な画素差分値が算出される。したがって、差分画像内に優位な画素差分値を有する領域があるか否かを判定すれば、車両Vの周辺に障害物が存在するか否かを判定することができる。
【0052】
この差分画像を運転者に提示することにより、運転者は車両Vの周辺に存在する障害物の有無を判断することはできるが、より運転者の判断が容易になるように、本実施形態では、表示部Daにトップビュー画像を表示し、その画像中に障害物を示す指標を重畳表示している。
【0053】
そのため、差分画像が生成されると、制御部10は、画像合成部20に対して、トップビュー画像の生成、および、トップビュー画像に障害物を示す指標を重畳させるよう指示を送る。これに対して、画像合成部20は、視点変換部12を用いて、各カメラCの撮影画像および差分画像をトップビュー画像に視点変換する(#10)。なお、差分画像は主撮影画像を基準として生成されたものであるため、主撮影画像と同じ視点変換処理を受ける。
【0054】
また、画像合成部20は差分画像から障害物を検出する(#11)。上述したように、障害物は差分画像中で優位な画素値を有する領域である。そのため、差分画像に対して2値化および領域分割を施せば、障害物の領域が検出できる。また、差分画像に対してエッジ抽出および2値化を施せば、障害物の輪郭を抽出することができる。画像合成部20は、このようにして障害物を検出し、上述の処理により合成したトップビュー画像に対して、障害物の位置を示す指標を合成する(#12)。このようにして生成された画像はメモリに記憶され、制御部10の指示によって表示部Daに表示される(#13)。
【0055】
図7は上述の処理によって表示部Daに表示される表示画像の例である。図7(a)では、トップビュー画像に対して障害物Aの輪郭を表す指標Eを合成している。一方、図7(b)では、トップビュー画像に対して障害物Aの路面との接地位置を示す指標Eを合成している。なお、この例では、トップビュー画像を合成する際に、フロントカメラFの撮影範囲と左サイドカメラSLの撮影範囲との重複する範囲は双方の画像を合成しているため、障害物Aの形状は実際の形状とは異なっている。
【実施例2】
【0056】
図8は本実施例における車両周辺撮影装置の機能ブロック図である。なお、実施例1と同様の機能部に対しては実施例1と同じ符号を付しており、詳細な説明は省略する。本実施例の車両周辺撮影装置は、画像のエッジ抽出を行うエッジ抽出部15、2つの画像に対して論理積を施した積画像を生成する積画像生成部16を備えている点において実施例1と異なっている。
【0057】
エッジ抽出部15は、画像からエッジ抽出を行う。エッジの抽出は、CannyアルゴリズムやSobelオペレータ等の公知の方法を用いることができる。なお、Sobelオペレータを使用すると実際のエッジの両側にエッジが検出されるため、膨張処理および細線化処理を施しておくことが望ましい。
【0058】
積画像生成部16は、2つの画像において対応する画素位置の画素値の論理積を算出し、その論理積の値を画素値とする積画像を生成する。なお、本発明における論理積とは一般的な論理積の概念を拡張したものであり、第1の画素値および第2の画素値がともに優位な値(例えば、閾値よりも大きい値)を有している場合にこれらの論理積が優位な値(固定値であっても、所定の値よりも大きい値であっても構わない)となり、それ以外の場合にはこれらの論理積は劣位(例えば、閾値以下の場合)な値となるものである。したがって、2つの画像がともに2値画像であれば本発明における論理積は一般的なandオペレータとなる。
【0059】
一方、画像が多値の場合には次のようにして論理積を算出することができる。例えば、真値を1(優位な値)、偽値を0(劣位な値)とし、第1の画素値をp1、第2の画素値をp2とすると、第1の画素値p1と第2の画素値p2との論理積は(p1>TH1)&(p2>TH2)なる論理演算の結果とすることができる。この場合、第1の画素値p1が閾値TH1よりも大きく、かつ、第2の画素値p2が閾値TH2よりも大きい、すなわち、両方の画素値が優位な値である場合にのみ、上述の論理演算の結果は真値となる。この場合には、積画像は2値画像となる。なお、閾値TH1と閾値TH2とは同じ値であっても構わないし、異なる値であっても構わない。また、閾値TH1と閾値TH2とは固定値であっても構わないし、大津の判別分析法等の方法等によって画像の画素値の分布に応じて定められた値であっても構わない。
【0060】
このように、論理積の概念を拡張することにより、画像を予め2値化することなく、画像間の論理積を算出することができる。そのため、2値画像を記憶するためのメモリが不要となり、車両周辺撮影装置のメモリ容量が小さい場合には有利となる。
【0061】
図9は本実施例における画像周辺撮影装置の処理の流れを表すフローチャートである。なお、#01から#03、および、#10〜#13までの処理は実施例1と同様であるため、詳細な説明は省略する。
【0062】
制御部10は、差分画像の生成が完了すると、エッジ抽出部15に対して主撮影画像のエッジ抽出を行うよう指示を送る。エッジ抽出部15はこの指示を受けて、主撮影画像に対してCannyアルゴリズムを適用してエッジ画像を生成する(#04)。なお、本実施形態では、エッジ抽出部15は、生成されたエッジ画像に対して膨張処理を施している。このようにして生成されたエッジ画像(2値画像)はメモリに記憶される。なお、本実施例におけるエッジ画像では、エッジ画素の画素値を1(優位な値)、非エッジ画素の画素値を0(劣位な値)としている。
【0063】
制御部10は、エッジ画像の生成が完了すると、積画像生成部16に対して、差分画像と主撮影画像のエッジ画像とから積画像を生成するよう指示を送る。この指示を受けた積画像生成部16は、上述の処理により積画像を生成する(#05)。なお、本実施例では、差分画像が多値画像、エッジ画像が2値画像であるため、差分画像の画素値をp1、エッジ画像の画素値をp2とすると、論理演算式は(p1>TH1)&p2となる。このようにして生成された積画像はメモリに記憶される。
【0064】
制御部10は、積画像の生成が完了すると、画像合成部20に対して合成画像の生成を指示し、生成された合成画像を表示部Daに表示する(#10〜#13)。なお、実施例1では#11の処理において差分画像から障害物を検出したが、本実施例では差分画像から障害物の領域を抽出することに代えて、積画像において真値を有する領域を障害物の領域とする。
【0065】
図10(a)は第1画像のエッジ画像の例であり、エッジ画像には主撮影画像における障害物の輪郭や路面の白線等の輪郭が含まれている。図10(b)はこのエッジ画像と図6の差分画像とから生成した積画像の例である。図から明らかなように、積画像には白線等の領域が含まれておらず、差分画像では正確に検出されていなかった障害物の輪郭形状がより正確に検出されている。したがって、この障害物の輪郭形状を用いれば、図11に示すように、正確な障害物Aの輪郭形状を示す指標Eを合成したトップビュー画像を合成することができる。
【0066】
本実施例では、このように、主撮影画像のエッジと差分画像との積画像に基づいて障害物の領域を抽出している。そのため、本実施例によれば、実施例1において誤検出された障害物の領域であって、障害物の輪郭付近にない領域を除外することができる。そのため、実施例1に比べて、より高精度な障害物の領域の抽出を行うことができる。
【実施例3】
【0067】
図12は本実施例における画像周辺撮影装置の機能ブロック図である。なお、実施例2と同様の機能部に対しては実施例2と同じ符号を付しており、詳細な説明は省略する。本実施例の車両周辺撮影装置は、画像に対して領域分割処理を施す領域分割部17、障害物画像生成部18を備えている。
【0068】
領域分割部17は、画像の画素値(RGB値等のカラー値であっても輝度値であっても構わない)に基づいて領域分割処理を行い、ラベリング画像を生成する。なお、ラベリング画像とは、領域分割処理において同じ領域に属すると判定された画素に同じ画素値(ラベル値)を付与した画像である。領域分割は、グラフカット、Mean−Shift等の公知の手法を用いることができる。
【0069】
障害物画像生成部18は、領域分割された各々の領域と積画像において真値を有する領域との類似性に基づいて障害物の領域を抽出した障害物画像を生成する。なお、障害物画像とは、障害物であると判定された領域に属する画素の画素値を真値とした画像である。
【0070】
上述したように、積画像において真値を有する領域は障害物の輪郭形状を表している。したがって、障害物画像生成部18は、領域分割された各々の領域と、積画像に表されている輪郭との類似性に基づいて障害物の領域を求めている。なお、領域と輪郭との類似性の尺度は様々なものを利用することができる。例えば、比較対象の輪郭と、比較対象の領域の輪郭との一致性や、比較対象の輪郭により囲まれた領域と比較対象の領域との一致性等を用いることができる。
【0071】
図13は本実施例における画像周辺撮影装置の処理の流れを表すフローチャートである。なお、#01から#05、および、#10〜#13までの処理は実施例2と同様であるため、詳細な説明は省略する。
【0072】
制御部10は、積画像の生成が完了すると、領域分割部17に対して、主撮影画像および積画像の領域分割を行うよう指示を送る。指示を受けた領域分割部17は主撮影画像を領域分割し、第1ラベリング画像を生成する(#06)。また、積画像を領域分割し、第2ラベリング画像を生成する(#07)。これらのラベリング画像はメモリに記憶される。
【0073】
制御部10は、領域分割が完了すると、障害物画像生成部18に対して障害物画像を生成するよう指示を送る。指示を受けた障害物画像生成部18は、障害物画像を生成し、メモリに記憶する(#08)。
【0074】
図14は、障害物画像生成処理の流れを表すフローチャートである。まず、第1ラベリング画像から一の領域(以下、第1領域と称する)を選択する(#31)。また、第2ラベリング画像から一の領域(以下、第2領域と称する)を選択する(#32)。そして、第1領域と第2領域との類似性を算出する(#33)。このとき、使用する類似性の尺度に応じて第1領域および第2領域の特徴量の算出が行われる。なお、予め領域の特徴量を求めておき、メモリに記憶させておいても構わない。
【0075】
算出された類似性が所定の閾値よりも大きければ(#34のYes分岐)、第1領域を障害物の領域とし、メモリ上に確保された障害物領域画像用の2次元配列の第1領域に対応する画素値に真値を代入する(#35)。
【0076】
第2ラベリング画像において未処理の領域が存在すれば(#36のYes分岐)、処理を#32に移行させ、上述の処理を繰り返す。一方、第2ラベリング画像において未処理の領域が存在しなければ(#36のNo分岐)、第1ラベリング画像において未処理の領域が存在するか否かが判定され(#37)、未処理の領域が存在すれば(#37のYes分岐)、処理を#31に移行させ、上述の処理が繰り返される。
【0077】
本実施例では、このように、主撮影画像の各領域と積画像において真値を有する領域、すなわち、実施例2で障害物として抽出された領域との類似性に基づいて、障害物の領域を抽出している。そのため、本実施例によれば、実施例2において誤検出された障害物の領域であって、主撮影画像の領域と整合しない形状等を有する領域を除外することができる。そのため、実施例2に比べて、より高精度な障害物の領域の抽出を行うことができる。
【実施例4】
【0078】
上述の実施例1から実施例3では、第1カメラ(上述の実施例では、フロントカメラF)を主カメラ、第2カメラ(上述の実施例では、左サイドカメラSL)を副カメラとして処理を行った。これに対して、本実施例では、第1カメラを主カメラ、第2カメラを副カメラとした処理結果(出力画像)と、第1カメラを副カメラ,第2カメラを主カメラとした処理結果(出力画像)とを統合した結果を出力する。なお、処理結果の統合は、例えば、両方の処理結果において、障害物の領域が対応する位置になければ、処理結果から除外する。これにより、障害物の領域の障害物としての確からしさがダブルチェックされ、抽出精度を高めることができる。なお、両方の処理結果における障害物の領域の位置の対応関係は主カメラと副カメラとの姿勢に基づいて検証することができる。また、視点変換等の誤差により、両方の処理結果における障害物の領域は完全に対応する位置とはならない可能性がある。その場合には、車両Vに近い側の障害物の領域を使用することが望ましい。
【0079】
〔実施例1への適用〕
図15は本実施例の処理を実施例1の処理に適用した場合の処理の流れを模式的に表す図である。まず、実施例1と同様に第1カメラを主カメラ、第2カメラを副カメラとして、差分画像(以下、第1差分画像と称する)の生成を行う(#02〜#03)。また、第2カメラを主カメラ、第1カメラを副カメラとして、差分画像(以下、第2差分画像と称する)の生成を行う(#02’〜#03’)。そして、第1差分画像と第2差分画像とを統合して出力画像としての差分画像を生成する。
【0080】
〔実施例2への適用〕
実施例2の処理において、実施例1の処理により生成された差分画像に代えて、図15の処理により生成された差分画像(出力画像)を用いても構わない。また、図16に模式的に示す処理を行っても構わない。まず、実施例2と同様に第1カメラを主カメラ、第2カメラを副カメラとして、積画像(以下、第1積画像と称する)の生成を行う(#02〜#05)。また、第2カメラを主カメラ、第1カメラを副カメラとして、積画像(以下、第2積画像と称する)の生成を行う(#02’〜#05’)。そして、第1積画像と第2積画像とを統合して出力画像としての積画像を生成する。また、この図16の処理における差分画像の生成処理を図15の処理に置き換えても構わない。
【0081】
〔実施例3への適用〕
実施例3の処理において、実施例2の処理により生成された積画像に代えて、図16の処理により生成された積画像(出力画像)を用いても構わない。また、図17に模式的に示す処理を行っても構わない。まず、実施例3と同様に第1カメラを主カメラ、第2カメラを副カメラとして、障害物画像(以下、第1障害物画像と称する)の生成を行う(#02〜#08)。また、第2カメラを主カメラ、第1カメラを副カメラとして、障害物画像(以下、第2障害物画像と称する)の生成を行う(#02’〜#08’)。そして、第1障害物画像と第2障害物画像とを統合して出力画像としての障害物画像を生成する。また、この図17の処理における差分画像の生成処理を図15の処理に置き換えても構わないし、積画像の生成処理を図16の処理に置き換えても構わない。
【0082】
〔別実施形態〕
(1)上述の実施形態では、4つのカメラCの撮影画像を合成したトップビュー画像を生成してディスプレイに表示する構成としたが、一部のカメラCの撮影画像を用いた表示を行う構成としても構わない。この場合には、車両Vに搭載されている様々なセンサ等の出力に基づいて使用するカメラを選択する構成とすることもできる。例えば、ステアリングの操舵角を検出するステアリングセンサの出力とシフトレバーの操作位置を検出するシフトレバーセンサの出力とに基づいて車両Vの進行方向を判定し、その進行方向側のカメラCの撮影画像を用いた表示を行う構成とすることができる。具体的には、ステアリングセンサの操舵角が左方向であり、シフトレバーセンサの出力が後進(=R)の場合には、車両Vの進行方向は左後方であるため、左サイドカメラSLとリアカメラRとの撮影画像を用いた表示を行う。
【0083】
(2)また、撮影画像を合成せずに、各々のカメラCにより撮影された画像をそのまま表示しても構わない。なお、この場合にも障害物を示す指標Eを重畳させることが望ましい。
【産業上の利用可能性】
【0084】
本発明は、撮影領域の一部が互いに重複するように車両に搭載された複数のカメラにより車両の周辺の情景を撮影する車両周辺撮影技術に適用することができる。
【符号の説明】
【0085】
C:カメラ
F:フロントカメラ
R:リアカメラ
SR:右サイドカメラ
SL:左サイドカメラ
13:視点変換部
14:画像差分部(画像情報比較部)
15:エッジ抽出部
16:積画像生成部
17:領域分割部
18:障害物画像生成部
【特許請求の範囲】
【請求項1】
車両に搭載され、当該車両の周辺の情景を撮影する第1カメラと、
前記車両に搭載され、前記第1カメラの撮影範囲と部分的に重複する撮影範囲を撮影する第2カメラと、
前記第1カメラと前記第2カメラとの一方を主カメラとするとともに他方を副カメラとし、当該主カメラにより撮影された画像を主撮影画像とするとともに当該副カメラにより撮影された画像を副撮影画像として、当該副撮影画像を当該主カメラの視点位置から撮影された画像に視点変換した視点変換画像を生成する視点変換部と、
前記主撮影画像と前記視点変換画像とを比較した比較情報を生成する画像情報比較部、とを備えた車両周辺撮影装置。
【請求項2】
前記主撮影画像からエッジを抽出したエッジ画像を生成するエッジ抽出部と、
前記比較情報としての差分画像と前記エッジ画像との画素値に論理積を施した積画像を生成し、当該積画像を出力画像として出力する積画像生成部と、を備えた請求項1記載の車両周辺撮影装置。
【請求項3】
前記主撮影画像を領域分割する領域分割部と、
前記領域分割された各々の領域と前記積画像において真値を有する領域との類似性に基づいて障害物の領域を抽出した障害物画像を生成し、前記積画像に代えて当該障害物画像を前記出力画像として出力する障害物画像生成部と、を備えた請求項2記載の車両周辺撮影装置。
【請求項4】
前記第1カメラを前記主カメラとして前記出力画像を第1出力画像として生成するとともに、前記第2カメラを前記主カメラとして前記出力画像を第2出力画像として生成し、
前記第1出力画像と前記第2出力画像とに基づいて障害物を示す画素を所定の画素値に設定した画像を出力画像として出力する請求項1から3のいずれか一項に記載の車両周辺撮影装置。
【請求項5】
車両に搭載され、当該車両の周辺の情景を撮影する第1カメラから撮影画像を取得するステップと、
前記車両に搭載され、前記第1カメラの撮影範囲と部分的に重複する撮影範囲を撮影する第2カメラから撮影画像を取得するステップと、
前記第1カメラと前記第2カメラとの一方を主カメラとするとともに他方を副カメラとし、当該主カメラにより撮影された前記撮影画像を主撮影画像とするとともに当該副カメラにより撮影された前記撮影画像を副撮影画像として、当該副撮影画像を当該主カメラの視点位置から撮影された画像に視点変換した視点変換画像を生成するステップと、
前記主撮影画像と前記視点変換画像とを比較した比較情報を生成するステップと、を備えた車両周辺画像の処理方法。
【請求項1】
車両に搭載され、当該車両の周辺の情景を撮影する第1カメラと、
前記車両に搭載され、前記第1カメラの撮影範囲と部分的に重複する撮影範囲を撮影する第2カメラと、
前記第1カメラと前記第2カメラとの一方を主カメラとするとともに他方を副カメラとし、当該主カメラにより撮影された画像を主撮影画像とするとともに当該副カメラにより撮影された画像を副撮影画像として、当該副撮影画像を当該主カメラの視点位置から撮影された画像に視点変換した視点変換画像を生成する視点変換部と、
前記主撮影画像と前記視点変換画像とを比較した比較情報を生成する画像情報比較部、とを備えた車両周辺撮影装置。
【請求項2】
前記主撮影画像からエッジを抽出したエッジ画像を生成するエッジ抽出部と、
前記比較情報としての差分画像と前記エッジ画像との画素値に論理積を施した積画像を生成し、当該積画像を出力画像として出力する積画像生成部と、を備えた請求項1記載の車両周辺撮影装置。
【請求項3】
前記主撮影画像を領域分割する領域分割部と、
前記領域分割された各々の領域と前記積画像において真値を有する領域との類似性に基づいて障害物の領域を抽出した障害物画像を生成し、前記積画像に代えて当該障害物画像を前記出力画像として出力する障害物画像生成部と、を備えた請求項2記載の車両周辺撮影装置。
【請求項4】
前記第1カメラを前記主カメラとして前記出力画像を第1出力画像として生成するとともに、前記第2カメラを前記主カメラとして前記出力画像を第2出力画像として生成し、
前記第1出力画像と前記第2出力画像とに基づいて障害物を示す画素を所定の画素値に設定した画像を出力画像として出力する請求項1から3のいずれか一項に記載の車両周辺撮影装置。
【請求項5】
車両に搭載され、当該車両の周辺の情景を撮影する第1カメラから撮影画像を取得するステップと、
前記車両に搭載され、前記第1カメラの撮影範囲と部分的に重複する撮影範囲を撮影する第2カメラから撮影画像を取得するステップと、
前記第1カメラと前記第2カメラとの一方を主カメラとするとともに他方を副カメラとし、当該主カメラにより撮影された前記撮影画像を主撮影画像とするとともに当該副カメラにより撮影された前記撮影画像を副撮影画像として、当該副撮影画像を当該主カメラの視点位置から撮影された画像に視点変換した視点変換画像を生成するステップと、
前記主撮影画像と前記視点変換画像とを比較した比較情報を生成するステップと、を備えた車両周辺画像の処理方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−115738(P2013−115738A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−262498(P2011−262498)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
[ Back to top ]