
車両周辺監視装置

【課題】車両周辺の監視領域に存在する対象物を少なくともレーダ装置により検知する場合に、監視領域に存在する個々の対象物の検知の信頼性を高めることができる車両周辺監視装置を提供する。
【解決手段】レーダ装置2よりレーダ電波の走査を行なう車両周辺の監視領域を車載カメラ3により撮像し、撮像画像の色情報又は輝度情報に基づいて、監視領域におけるレーダ電波の反射率の分布を反射率推定手段5により推定する。レーダ電波の反射波に受信強度に対する閾値(監視領域の各局所に対応する閾値)を、受信強度閾値設定手段6により、推定した反射率の分布に応じて設定する。対象物認識手段7は、少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する。
【解決手段】レーダ装置2よりレーダ電波の走査を行なう車両周辺の監視領域を車載カメラ3により撮像し、撮像画像の色情報又は輝度情報に基づいて、監視領域におけるレーダ電波の反射率の分布を反射率推定手段5により推定する。レーダ電波の反射波に受信強度に対する閾値(監視領域の各局所に対応する閾値)を、受信強度閾値設定手段6により、推定した反射率の分布に応じて設定する。対象物認識手段7は、少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は車両の周辺を監視するためのレーダ装置を備える車両周辺監視装置に関する。
【背景技術】
【0002】
車両の走行支援等を目的として、車両の周辺の所要の監視領域(例えば車両の前方領域)に対するレーダ電波の送信・走査とその反射波の受信とを行なうレーダ装置(レーザレーダやミリ波レーダ等)を車両に搭載し、該レーダ装置で受信されたレーダ電波の反射波に基づいて、車両の周辺の監視領域に存在する他車両や歩行者等の対象物を検知したり、検知した対象物の自車両からの距離や自車両に対する相対速度等を観測する技術が従来より一般に知られている。
【0003】
さらに、例えば特許文献1に見られるように、上記の如きレーダ装置による対象物の検出結果と、車載カメラにより取得した車両の周辺の監視領域の撮像画像とを利用して、該監視領域に存在する対象物の種類を判別する技術が本願出願人により提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−304033号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、レーダ装置は、受信する反射波に含まれる外乱ノイズの影響を排除するために、通常、監視領域のうちの任意の方位角方向へのレーダ電波の送信に対応して、所定の閾値以上の強度の反射波を受信した場合に、その方位角方向に対象物が存在することを検知する。
【0006】
しかるに、他車両等の対象物の表面部は、複数の部品により構成されているため、該対象物の表面部の各部がほぼ一定の同じ反射率でレーダ電波を反射するとは限らず、該対象物の部分部分によって、レーダ電波の反射率のばらつきが比較的大きなものとなる場合も多々ある。
【0007】
このような場合には、単一の対象物のうちの互いには離れた複数の部位からの反射波(所定の閾値以上の強度の反射波)が受信される一方、それらの複数の部位の間の部分からは、所定の閾値以上の反射波が受信されないという状況が生じる場合がある。
【0008】
そして、このような場合には、単一の対象物の複数の部分が、互いに異なる対象物として誤認識される恐れがあった。ひいては、それらの対象物が各別の対象物であるとみなして、運転者に対する報知や車両の運転制御等が行なわれる恐れがあった。
【0009】
本発明はかかる背景に鑑みてなされたものであり、車両周辺の監視領域に存在する対象物を少なくともレーダ装置により検知する場合に、単一の対象物が複数の対象物として誤認識されたり、対象物の局所部分だけが対象物として認識されてしまうようなことを防止し、監視領域に存在する個々の対象物の検知の信頼性を高めることができる車両周辺監視装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の車両周辺監視装置は、上記の目的を達成するために、車両周辺の監視領域に対してレーダ電波を走査すると共に該レーダ電波の反射波を受信し、受信した該反射波に基づいて前記監視領域に存在する対象物を検知するレーダ装置を備えた車両周辺監視装置において、
前記監視領域を撮像する車載カメラと、
該車載カメラの撮像画像の色情報又は輝度情報に基づいて、前記監視領域における前記レーダ電波の反射率の分布を推定する反射率分布推定手段と、
前記推定された反射率の分布に応じて前記監視領域の各局所における前記反射波の受信強度に対する閾値を設定する手段であり、前記監視領域のうちの前記反射率が相対的に小さい局所よりも該反射率が相対的に大きい局所の方が、該閾値が相対的に高くなるように該閾値を設定する受信強度閾値設定手段と、
少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する対象物認識手段とを備えることを特徴とする(第1発明)。
【0011】
かかる第1発明によれば、前記反射率分布推定手段は、車載カメラの撮像画像の色情報又は輝度情報に基づいて、前記レーダ電波を走査する監視領域における前記レーダ電波の反射率の分布を推定する。さらに、推定された反射率の分布に応じて、前記監視領域の各局所における前記反射波の受信強度に対する閾値が前記受信強度閾値設定手段により設定される。
【0012】
この場合、前記監視領域の各局所における上記閾値は、推定された反射率が相対的に小さい局所よりも該反射率が相対的に大きい局所の方が、相対的に高くなるように設定される。従って、前記監視領域に対象物が存在する場合に、各対象物におけるレーダ電波の反射率の大きさが該対象物の部分部分でばらつきを有する場合には、それに合せて、監視領域の居所毎の閾値の高低に差異が生じるように該閾値が設定される。
【0013】
そして、前記対象物認識手段は、少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する。
【0014】
この場合、前記閾値は上記の如く設定されているので、監視領域に存在する実際の単一の対象物が、その部分部分でレーダ電波の反射率がばらつくような場合であっても、該単一の対象物の存在領域内で、レーダ電波の反射波の受信強度が閾値以上となる部分が分散してしまうようなことが防止される。従って、単一の対象物が実際に存在する領域では、そのほぼ全体の領域でのレーダ電波の反射波の受信強度が前記閾値以上になる。
【0015】
このため、前記監視領域に存在する単一の対象物が、前記対象物認識手段によって複数の対象物として検知されてしまうのが防止される。
【0016】
よって、第1発明によれば、単一の対象物が複数の対象物として誤認識されたり、対象物の一部分だけが対象物として認識されてしまうようなことを防止できる。ひいては、監視領域に存在する個々の対象物の検知の信頼性を高めることができる。
【0017】
かかる第1発明では、前記対象物認識手段は、例えば、前記監視領域のうち、前記反射波の受信強度が、前記設定された閾値以上となる局所が連続的に集合する領域のそれぞれを、単一の対象物の存在領域として検知する(第2発明)。
【0018】
この第2発明によれば、前記対象物認識手段は、前記監視領域のうちの、単一の対象物が実際に存在する領域のほぼ全体を単一の対象物の存在領域として検知することができる。
【0019】
上記第1発明において、監視領域に存在する対象物がレーダ電波の反射率が極めて高いような部分を有する場合には、単一の対象物が複数の対象物として誤認識される場合もある。あるいは、該対象物の全体のレーダ電波の反射率が極めて低いものである場合には、監視領域に該対象物が存在しても、該対象物が存在する領域の全体においてレーダ電波の反射波の受信強度が前記閾値よりも下回ってしまう場合もある。
【0020】
そこで、第1発明では、前記対象物認識手段は、前記推定された反射率の分布が、あらかじめ定めた上限値よりも高い値の反射率となる領域を含むという条件と、前記推定された反射率の分布における各局所の反射率の推定値があらかじめ定めた下限値よりも低いという条件とのうちの少なくとも一方の条件が成立するか否かを判断する判断手段をさらに備えており、該判断手段の判断結果が否定的である場合には、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該反射波の受信強度を主要参照情報として用いて前記監視領域における対象物の検知を行い、該判断手段の判断結果が肯定的である場合には、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該撮像画像を主要参照情報として用いて前記監視領域における対象物の検知を行うようにしてもよい(第3発明)。
【0021】
この第3発明によれば、前記推定された反射率の分布が、あらかじめ定めた上限値よりも高い値の反射率となる領域を含むという条件と、前記推定された反射率の分布における各局所の反射率の推定値があらかじめ定めた下限値よりも低いという条件とのうちの少なくとも一方の条件が成立するか否かが前記判断手段により判断される。
【0022】
この場合、この判断手段の判断結果は、レーダ電波の反射波の受信強度に基づく対象物の検知を高い信頼性で行い得るか否かを示す指標としての意味をもつ。
【0023】
そして、前記対象物認識手段は、該判断手段の判断結果が否定的である場合、すなわち、レーダ電波の反射波の受信強度に基づく対象物の検知を高い信頼性で行い得る状況では、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該反射波の受信強度を主要参照情報として用いて前記監視領域における対象物の検知を行う。
【0024】
これによりレーダ電波の反射率が前記上限値及び下限値の間に収まるような適度な反射率を有する対象物が監視領域に存在する場合に、個々の対象物を高い信頼性で、相互に区別して検知できる。
【0025】
一方、該判断手段の判断結果が肯定的である場合、すなわち、前記監視領域に、レーダ電波の反射率が前記上限値よりも高い反射率となる領域が存在する場合、あるいは、該監視領域の各所におけるレーダ電波の反射率が前記下限値よりも低い場合には、レーダ電波の反射波の受信強度に基づく対象物の検知を高い信頼性で行うことが困難となる状況である。このため、この場合には、前記対象物認識手段は、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該撮像画像を主要参照情報として用いて前記監視領域における対象物の検知を行う。
【0026】
これにより、前記レーダ装置による前記反射波の受信強度に基づく対象物の検知の信頼性を確保することが困難となる状況では、車載カメラの撮像画像を主要参照情報として用いて対象物の検知を行なうことで、その検知の信頼性が損なわれるのを防止できる。
【0027】
このように第3発明によれば、前記推定された反射率の分布に基づく前記判断手段の判断結果を、レーダ電波の反射波の受信強度に基づく対象物の検知の信頼性の高低を示す指標として得ることができる。そして、この判断結果に応じて、前記反射波の受信強度と車載カメラの撮像画像とのうちのより信頼性の高い方を主要参照情報として用いて対象物の検知を行なうので、対象物の検知の信頼性を高めることができる。
【0028】
また、本発明の車両周辺監視装置は、車両周辺の監視領域に対してレーダ波のビームを走査すると共に該レーダ波の反射波を受信し、受信した該反射波に基づいて前記監視領域に存在する対象物を検知するレーダ装置を備えた車両周辺監視装置において、
前記監視領域を撮像する車載カメラと、
該車載カメラの撮像画像の色情報又は輝度情報に基づいて、前記監視領域における前記レーダ波の反射率の分布を推定する反射率分布推定手段と、
前記推定された反射率の分布が、あらかじめ定めた上限値よりも高い値の反射率となる領域を含むという条件と、前記推定された反射率の分布における各局所の反射率の推定値があらかじめ定めた下限値よりも低いという条件とのうちの少なくとも一方の条件が成立するか否かを判断する判断手段と、
該判断手段の判断結果が否定的である場合には、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該反射波の受信強度を主要参照情報として用いて前記監視領域における対象物の検知を行い、該判断手段の判断結果が肯定的である場合には、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該撮像画像を主要参照情報として用いて前記監視領域における対象物の検知を行う対象物認識手段とを備えることを特徴とする(第4発明)。
【0029】
この第4発明によれば、前記第1発明と同様に、前記反射率分布推定手段は、車載カメラの撮像画像の色情報又は輝度情報に基づいて、前記レーダ電波を走査する監視領域における前記レーダ電波の反射率の分布を推定する。
【0030】
そして、前記第3発明と同様に、前記推定された反射率の分布が、あらかじめ定めた上限値よりも高い値の反射率となる領域を含むという条件と、前記推定された反射率の分布における各局所の反射率の推定値があらかじめ定めた下限値よりも低いという条件とのうちの少なくとも一方の条件が成立するか否かが前記判断手段により判断される。このため、この判断手段の判断結果は、レーダ電波の反射波の受信強度に基づく対象物の検知を高い信頼性で行い得るか否かを示す指標としての意味をもつ。
【0031】
そして、前記対象物認識手段は、該判断手段の判断結果が否定的である場合、すなわち、レーダ電波の反射波の受信強度に基づく対象物の検知を高い信頼性で行い得る状況では、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該反射波の受信強度を主要参照情報として用いて前記監視領域における対象物の検知を行う。このように前記反射波の受信強度を主要参照情報として用いることで、対象物の検知を適正に行なうことができる。
【0032】
なお、第3発明では、前記反射波の受信強度を主要参照情報として用いて対象物の検知を行なう場合、第1発明又は第2発明と同様に行なうようにしてもよいが、例えば、該受信強度をあらかじめ定めた所定の閾値と比較することで、対象物を検知するようにしてもよい。
【0033】
一方、該判断手段の判断結果が肯定的である場合、すなわち、前記監視領域に、レーダ電波の反射率が前記上限値よりも高い反射率となる領域が存在する場合、あるいは、該監視領域の各所におけるレーダ電波の反射率が前記下限値よりも低い場合には、レーダ電波の反射波の受信強度に基づく対象物の検知を高い信頼性で行うことが困難となる状況である。このため、この場合には、前記対象物認識手段は、前記第3発明と同様に、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該撮像画像を主要参照情報として用いて前記監視領域における対象物の検知を行う。
【0034】
これにより、前記レーダ装置による前記反射波の受信強度に基づく対象物の検知の信頼性を確保することが困難となる状況では、車載カメラの撮像画像を主要参照情報として用いて対象物の検知を行なうことで、その検知の信頼性が損なわれるのを防止できる。
【0035】
このように第4発明によれば、前記第3発明と同様に、前記推定された反射率の分布に基づく前記判断手段の判断結果を、レーダ電波の反射波の受信強度に基づく対象物の検知の信頼性の高低を示す指標として得ることができる。そして、この判断結果に応じて、前記反射波の受信強度と車載カメラの撮像画像とのうちのより信頼性の高い方を主要参照情報として用いて対象物の検知を行なうので、監視領域に存在する個々の対象物の検知の信頼性を高めることができる。
【0036】
なお、第3発明又は第4発明では、前記判断手段の判断結果が否定的である場合に、車載カメラの撮像画像を補完的な参照情報として用いて対象物を検知するようにしてもよいことはもちろんであるが、車載カメラの撮像画像を用いることなく、レーダ装置による反射波の受信強度に基づいて対象物の検知を行なうようにしてもよい。
【0037】
逆に、前記判断手段の判断結果が肯定的である場合に、レーダ装置による反射波の受信強度を補完的な参照情報として用いて対象物を検知するようにしてもよいことはもちろんであるが、レーダ装置による反射波の受信強度を用いることなく、車載カメラの撮像画像だけに基づいて対象物の検知を行なうようにしてもよい。
【図面の簡単な説明】
【0038】
【図1】本発明の実施形態における車両を示す斜視図。
【図2】図1の車両に備えた車両周辺監視装置の構成を示すブロック図。
【図3】図1の車両に備えたレーダ装置によるレーダ電波の走査形態を示す図。
【図4】図2に示す演算処理ユニットの第1実施形態における処理を示すフローチャート。
【図5】図4のSTEP1の処理を説明するための図。
【図6】図6(a),(b)は図4のSTEP3、4の処理を説明するための図。
【図7】図2に示す対象物認識部の第2実施形態における処理を示すフローチャート。
【発明を実施するための形態】
【0039】
[第1実施形態]
本発明の第1実施形態を図1〜図6を参照して以下に説明する。
【0040】
図1及び図2に示すように、本実施形態の車両周辺監視装置は、車両1にそれぞれ搭載されたレーダ装置2、車載カメラ3及び演算処理ユニット4を備える。この車両周辺監視装置による車両1の周辺の監視領域は、車両1の前方領域である。このため、レーダ装置2及び車載カメラ3は車両1の前部に搭載されている。
【0041】
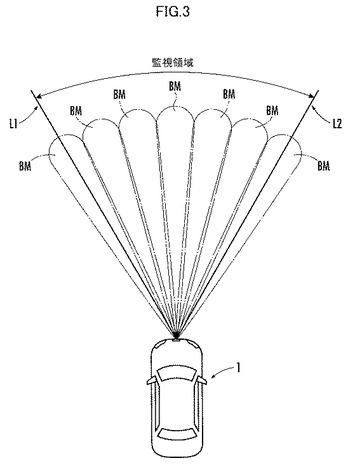
レーダ装置2は、本実施形態では、例えば近赤外域の波長のレーザ光をレーダ電波として使用するレーザレーダである。このレーダ装置2は、図3に示すように、レーダ電波(レーザ光)のビームBMを、車両1の前方の監視領域(図中の直線L1,L2の間の領域)の各所に送信し、そのビームBMの送信方向に存在する対象物によるレーダ電波の反射波を受信する。
【0042】
この場合、レーダ装置2は、走査型のレーダであり、レーダ電波のビームBMの送信方向(方位角)をヨー軸周り方向に一定角度ずつ変化させていくことで、監視領域に対してレーダ電波のビームBMを、車両1の走行路面にほぼ平行な走査面上で走査する。そして、レーダ装置2は、レーダ電波のビームBMの各送信方向毎に、送信したレーダ電波の反射波の受信を行なう。
【0043】
車載カメラ3は、CCDカメラ又はCMOSカメラ等から成る撮像カメラであり、上記監視領域を含む撮像領域の画像を撮像するように車両1に搭載されている。この車載カメラ3の撮像画像は、本実施形態では、カラー画像である。
【0044】
演算処理ユニット4は、CPU、RAM、ROM、インターフェイス回路等により構成された電子回路ユニットである。この演算処理ユニット4には、レーダ装置2が受信した反射波の受信信号と車載カメラの撮像画像の映像信号とが入力され、これらの信号が、A/D変換されて演算処理ユニット4に取り込まれる。
【0045】
そして、演算処理ユニット4は、入力されたデータを基に、車両1の前方に存在する所定種類の対象物を認識し、自車両1からの対象物までの距離や、自車両1に対する対象物までの相対速度を推定する。さらに、演算処理ユニット4は、自車両1からの対象物までの距離や、自車両1に対する対象物までの相対速度等を基に、認識した対象物と自車両1の接触の可能性を判断し、運転者に対する警報もしくは報知は、音声情報や視覚情報によって行なったり、自車両1の制動制御等を行う。
【0046】
以降、対象物として、例えば他車両(対向車又は先行車)を演算処理ユニット4で認識する場合を例にとって、該演算処理ユニット4が実行する対象物の認識処理を説明する。
【0047】
演算処理ユニット4は、本発明に関連する機能として、反射率推定部5、受信強度閾値設定部6及び対象物認識部7を備えている。これらの各機能部は、実装されたプログラム等により実現される機能であり、それぞれ、本発明における反射率分布推定手段、受信強度閾値設定手段、対象物認識手段に相当している。
【0048】
以下に、これらの各機能物の処理の詳細を含めて、演算処理ユニット4で対象物(ここでは他車両)を認識する場合の処理を説明する。
【0049】
演算処理ユニット4は、対象物としての他車両を認識する場合に、図4のフローチャートに示す処理を実行する。
【0050】
具体的には、演算処理ユニット4は、まず、STEP1の処理を実行する。このSTEP1では、演算処理ユニット4は、レーダ装置2によるレーダ電波の反射波の受信信号に基づいて、レーダ電波のビームBMの各送信方向に物体(送信したレーダ電波を反射する物体)が存在するか否かを検知すると共に、物体が存在することが検知された各送信方向において、該物体の自車両1に対する相対速度を推定する。そして、演算処理ユニット4は、その推定した相対速度を基に、レーダ電波のビームBMの各送信方向に存在する物体が所定種類の対象物としての他車両であるか否かを判定する。
【0051】
ここで、レーダ電波のビームBMの各送信方向に物体が存在するか否かは、その送信方向におけるレーダ電波の反射波の受信強度が所定値以上であるか否かによって検知される。また、レーダ電波のビームBMの各送信方向に存在する物体の相対速度は、送信したレーザ電波と受信した反射波との間のドップラーシフト等に基づく公知の手法によって推定される。なお、該相対速度の推定処理は、レーダ装置2で行なうようにしてもよい。
【0052】
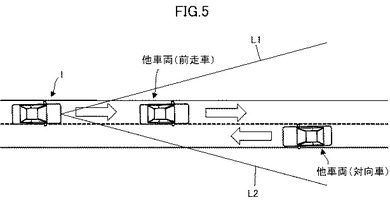
そして、演算処理ユニット4は、レーダ電波のビームBMの各送信方向毎に、推定した相対速度が、“0”もしくはその近辺の速度である場合に、当該送信方向に他車両としての前走車が存在すると判定する。また、演算処理ユニット4は、推定した相対速度が、自車両1の車速の2倍の速度もしくはその近辺の速度である場合に、当該送信方向に他車両としての対向車が存在すると判定する。
【0053】
これにより、レーダ電波の各送信方向毎に、その送信方向に対象物としての他車両が存在するか否かが認識されることとなる。例えば、図5に示す状況では、自車両1から前走車に向うレーダ電波の送信方向と、自車両1から対向車に向うレーダ電波の送信方向とに、他車両が存在することが認識されることとなる。
【0054】
なお、STEP1の処理では、レーダ電波の互いに異なる送信方向に存在する他車両が互いに同一の他車両であるか否かの判断は行なわれない。また、STEP1の処理では、レーダ電波のビームBMの各送信方向毎の反射波の受信強度(A/D変換後のデジタルデータ)は、演算処理ユニット4の記憶装置に記憶保持される。
【0055】
次いで、演算処理ユニット4は、STEP2の処理を実行する。このSTEP2では、演算処理ユニット4は、車載カメラ3の撮像画像(レーダ装置2によりレーダ電波の走査を行なった時刻もしくはその近辺の時刻での撮像画像)を取得する。その撮像画像は、演算処理ユニット4の記憶装置に記憶保持される。
【0056】
次いで、演算処理ユニット4は、反射率推定部5によりSTEP3の処理を実行する。このSTEP3では、反射率推定部5は、STEP2で取得した撮像画像を基に、レーダ電波の走査を行なう監視領域で車両1の前方に存在する物体におけるレーダ電波の反射率の分布を推定する。該反射率の分布は、より詳しくは、レーダ電波の走査方向(撮像画像の横方向)での分布である。
【0057】
ここで、本実施形態では、レーダ電波は、近赤外域の波長のレーザ光であり、種々の物体におけるこのレーダ電波の反射率は、一般に、可視光の反射率と近似したものとなる。すなわち、近赤外域の波長のレーザ光であるレーダ電波の反射率は、物体の色合いに応じて変化する傾向があり、物体の色合いが、黒色に近い場合よりも、白色に近い場合の方が、その物体におけるレーダ電波の反射率が相対的に高くなる傾向がある。
【0058】
また、監視領域に存在する物体は、車載カメラ3の撮像画像にカラー画像として投影されるので、この撮像画像によって、監視領域の各局所の色を認識できる。
【0059】
そこで、本実施形態では、反射率推定部5は、監視領域でのレーダ電波の反射率の分布を、該レーダ電波の走査面に対応する撮像画像の横方向のライン(以降、画像上走査ラインという)上で画像色に基づいて、レーダ電波の反射率の分布を推定する。
【0060】
この場合、画像上走査ライン上の各位置でのレーダ電波の反射率の推定値は、その各位置の近辺の局所域での画像の平均的な色に応じて、あらかじめ定められたデータテーブル(反射率と色との関係を示すデータテーブル)を用いて決定される。なお、画像上走査ライン上の各位置でのレーダ電波の反射率の推定値は、実空間で言えば、車載カメラ3の光学中心から撮像画像の撮像面における画像上走査ライン上の各点に向う直線の方向で車両1の前方に存在する物体の反射率の推定値に相当する。
【0061】
このように推定される反射率の分布の具体的な例を図6(a),(b)を参照して説明する。図6(a),(b)は、それぞれ監視領域に他車両が存在する状況を想定しており、それぞれの最上段の図は、他車両の撮像画像の模式化して示している。この場合、図6(a)に示す他車両は、レーダ電波(近赤外域のレーザ光)が反射され難い色、例えば黒色の車体色を有する車両であるとしている。また、図6(b)に示す他車両は、レーダ電波を比較的反射しやすい色、例えば白色の車体色を有する車両であるとしている。なお、最上段の図における一点鎖線のラインLaはレーダ電波の画像上走査ラインである。
【0062】
図6(a)の例では、画像上走査ラインLa上でのレーダ電波の反射率の推定値の分布は、例えば、図6(a)の中段のグラフで示すようなパターンの分布とされる。この場合、A1、A3、A5の領域は、レーダ電波を反射し難い黒色の車体色に対応する領域である。これらの領域A1、A3、A5に対応する反射率の推定値は、低い値とされる。
【0063】
また、A2、A4の領域は、他車両のランプ(テールランプ)に対応する領域であり、例えば赤系統の色の領域である。そして、これらの領域A2、A4に対応する反射率の推定値は、高い値とされる。
【0064】
一方、図6(b)の例では、画像上走査ラインLa上でのレーダ電波の反射率の推定値の分布は、例えば、図6(b)の中段のグラフで示すようなパターンの分布とされる。この場合、B1、B3、B5の領域は、レーダ電波を比較的反射しやすい白色の車体色に対応する領域である。これらの領域B1、B3、B5に対応する反射率の推定値は、比較的高い値(図6(a)のA1、A3、A5の領域よりも高い値)とされる。
【0065】
また、B2、B4の領域は、他車両のランプ(テールランプ)に対応する領域であり、図6(a)のA2、A4の領域と同様に、例えば赤系統の色の領域である。従って、これらの領域B2、B4に対応する反射率の推定値は、図6(a)のA2,A4の領域と同様に高い値に設定される。この領域B2、B4に対応する反射率の推定値は、本実施形態では、B1、B3、B5の領域よりも高い値である。
【0066】
次いで、演算処理ユニット4は、受信強度閾値設定部6によりSTEP4の処理を実行する。このSTEP4では、受信強度閾値設定部6は、STEP3で推定したレーダ電波の反射率の分布に応じて、あらかじめ設定されたデータテーブル又は演算式(レーダ電波の反射率と閾値との関係を規定するデータデーブル又は演算式)を用いて、車両1の前方の監視領域の局所毎(レーダ電波のビームBMの各送信方向に対応する局所毎)に、レーダ装置2が受信する反射波の受信強度に対する閾値(以降、受信強度閾値という)を設定する。
【0067】
この場合、レーダ電波の走査方向の各位置での受信強度閾値は、その位置での反射率の推定値が高いほど、該受信強度閾値が大きくなるように設定される。例えば図6(a)に示す例では、図6(a)の最下段の図の破線で示す如く、レーダ電波の反射率の推定値の分布パターン(図6(a)の中段図)と同様の分布パターンでレーダ電波の走査方向の各位置(ビームBMの各送信方向)に対応する受信強度閾値が設定される。
【0068】
また、図6(b)に示す例では、図6(b)の最下段の図の破線で示す如く、レーダ電波の反射率の推定値の分布パターン(図6(b)の中段図)と同様の分布パターンでレーダ電波の走査方向の各位置(ビームBMの各送信方向)に対応する受信強度閾値が設定される。
【0069】
従って、図6(a)の領域A1,A3,A5(黒色の車体色に対応する領域)で設定される受信強度閾値は、図6(b)の領域B1,B3,B5(白色の車体色に対応する領域)で設定される受信強度閾値よりも小さい値とされる。
【0070】
次いで、演算処理ユニット4は、対象物認識部7によりSTEP5の処理を実行する。このSTEP5では、対象物認識部7は、レーダ電波のビームBMの各送信方向に対応する監視領域の各位置(走査方向での位置)での反射波の実際の受信強度(STEP1で記憶保持された受信強度)を、STEP4で設定された受信強度閾値と比較し、車両1の前方の監視領域において、反射波の実際の受信強度が、受信強度閾値以上となる局所を抽出する。
【0071】
そして、対象物認識部7は、監視領域のうち、反射波の実際の受信強度が、受信強度閾値以上となる局所がレーダ電波の走査方向で連続的に集合する領域(ただし、該走査方向で所定の下限幅以上の幅を有する領域)を、単一の対象物(他車両)が存在する領域として決定することで、対象物の物標化を行なう。ここで、実際の受信強度が、受信強度閾値以上となる局所がレーダ電波の走査方向で連続的に集合する領域というのは、その領域の各所(走査方向での各所)における実際の受信強度が、受信強度閾値以上となる領域である。
【0072】
例えば図6(a)及び図6(b)に示した状況では、それぞれ、図中に示した対象物存在領域(他車両とほぼ同等の幅を有する領域)が、単一の他車両が存在する領域として決定される。
【0073】
ここで、仮に、受信強度閾値をあらかじめ定めた一定値とした場合には、監視対象の対象物が、レーダ電波の反射率が部分部分で比較的大きく異なるような対象物である場合に、単一の対象物が、複数の対象物として誤認識される場合がある。例えば、受信強度閾値を、図6(a),(b)の最下段の図の二点鎖線Sで示す如く設定した場合には、図6(a)に示す他車両では、実際の受信強度が受信強度閾値以上となる領域が、2つに分離してしまうため、単一の対象物(他車両)が2つの対象物として誤認識されてしまう。
【0074】
これに対して、本実施形態では、反射率の推定値に応じて受信強度閾値を変化させるので、監視対象の単一の対象物(他車両)が、複数の対象物として誤認識されるようなことを防止して、単一の対象物として正しく認識することができることとなる。
【0075】
なお、STEP5の処理では、レーダ電波の反射波の実際の受信強度だけでなく、必要に応じて車載カメラ3の撮像画像を補完的な参照情報として用いて監視領域に存在する対象物(他車両)の検知を行なうようにしてもよい。
【0076】
本実施形態では、演算処理ユニット4は、以上の如く認識した各対象物(他車両)について、該対象物からの反射波の受信信号に基づいて、該対象物の自車両1からの距離を推定する。その距離推定は、例えばレーダ電波の送受信の時間差等に基づく公知の手法によって行なわれる。そして、該対象物の自車両1に対する相対速度や自車両1からの距離に基づいて、該対象物と自車両1との接触の可能性を予測し、その予測結果に応じた警報もしくは報知を運転者に対して行なったり、あるいは、車両1の制動装置の制御等を行なう。
【0077】
かかる本実施形態によれば、各対象物でのレーダ電波の反射率が部分部分でばらつきを生じる場合であっても、単一の対象物を、複数の対象物として誤認識るようなことを防止しつつ、レーダ電波の反射波の受信強度に基づいて、車両1の前方の監視領域に存在する各対象物を認識することができる。
【0078】
[第2実施形態]
次に、本発明の第2実施形態を図7を参照して説明する。なお、本実施形態は、演算処理ユニット4の対象物認識部7の処理だけが第1実施形態と相違するので、その相違点を中心に説明し、第1実施形態と同一の事項については説明を省略する。
【0079】
レーダ電波のビームBMの送信方向に存在する対象物が、該レーダ電波の反射率が極めて高い対象物である場合、その対象物が単一であっても、レーダ電波の反射波の散乱等に起因して複数の対象物が存在するように認識されてしまう場合がある。
【0080】
また、レーダ電波のビームBMの送信方向に存在する対象物が、該レーダ電波の反射率が極めて低い対象物である場合、レーダ装置2による該反射波の受信強度が低くなるために、該受信強度に基づく対象物の存在の認識を高い信頼性で行なうことが困難となる場合もある。
【0081】
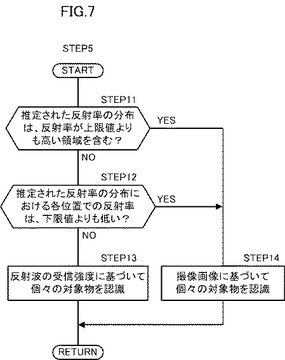
そこで、本実施形態では、演算処理ユニット4の対象物認識部7は、図7の処理を実行する。すなわち、対象物認識部7は、まず、STEP11,12の判断処理を実行する。STEP11では、対象物認識部7は、前記STEP3で反射率推定部5により推定された反射率の分布において、該反射率の推定値があらかじめ定められた所定の上限値よりも高い領域が含まれるか否かを判断する。
【0082】
また、STEP12では、対象物認識部7は、前記STEP3で反射率推定部5により推定された反射率の分布における各位置(レーダ電波のビームBMの各送信方向に対応する位置)での反射率の推定値があらかじめ定められた所定の下限値よりも低いか否か(換言すれば、推定された反射率の分布における全ての反射率の推定値が所定の下限値よりも低いか否か)を判断する。
【0083】
なお、STEP11,12の判断処理は、本発明における判断手段に相当するものである。
【0084】
そして、対象物認識部7は、STEP11,12の両方の判断結果が否定的となる場合には、第1実施形態と同様に、第1実施形態における対象物認識部7の処理と同様に、レーダ電波の反射波の受信強度に基づいて、車両1の前方の監視領域に存在する個々の対象物(他車両)を認識する。
【0085】
従って、監視領域におけるレーダ電波の反射率の分布状態が、レーダ電波の反射波の受信強度に基づく対象物の検知を高い信頼性で行ない得るような分布状態である場合には、第1実施形態における対象物認識部7の処理と同様に、レーダ電波の反射波の受信強度に基づいて監視領域に存在する個々の対象物(他車両)が互いに区別して認識されることとなる。
【0086】
一方、STEP11,12のいずれかの判断結果が肯定的となる場合には、反射波の受信強度に基づく対象物の認識を高い信頼性で行なうことが困難となることから、対象物認識部7は、車載カメラ3の撮像画像(前記STEP2で取得した撮像画像)に基づいて、前記画像上走査ラインLa上に存在する各対象物(他車両)を認識する。この場合、対象物認識部7は、例えば撮像画像から、対象物(他車両)に特徴的な形状部分を該対象物の存在領域として抽出する。
【0087】
以上が本実施形態における対象物認識部7の処理である。本実施形態は、以上説明した事項以外は、前記第1実施形態と同じである。
【0088】
かかる本実施形態によれば、前記STEP11,12のいずれかの判断結果が肯定的となる場合に、撮像画像を用いて対象物の認識を行なうので、レーダ電波の反射波の受信強度に基づく対象物の認識を高い信頼性で行なうことが困難となる状況でも、個々の対象物を適正に認識することができる。
【0089】
また、前記STEP11,12の両方の判断結果が否定的となる場合には、レーダ電波の反射波の受信強度に基づいて、個々の対象物を正しく区別しつつ、車両1の前方の監視領域に存在する各対象物を認識することができる。
【0090】
なお、前記第2実施形態では、STEP11,12の両方の判断結果が否定的となる場合に、レーダ電波の反射率の推定値の分布に応じて設定した受信強度閾値を用いて監視領域に存在する対象物を認識するようにしたが、受信強度閾値設定部6の処理(STEP4の処理)を省略し、反射波の受信強度をあらかじめ定めた閾値と比較することで、監視領域に存在する対象物を認識するようにしてもよい。
【0091】
また、前記第2実施形態において、STEP11、12のいずれか一方の判断処理を省略するようにしてもよい。
【0092】
また、前記第2実施形態におけるSTEP13の処理では、レーダ電波の反射波の受信強度だけでなく、必要に応じて、車載カメラ3の撮像画像を補完的な参照情報として用いて、監視領域に存在する対象物を認識するようにしてもよい。同様に、STEP14の処理では、車載カメラ3の撮像画像だけでなく、必要に応じてレーダ電波の反射波の受信強度を補完的な参照情報としても用いて、監視領域に存在する対象物を認識するようにしてもよい。
【0093】
また、前記各実施形態では、監視領域に存在する他車両を対象物として認識する場合を例にとって説明したが、例えば歩行者を対象物として認識するようにしてもよく、あるいは、歩行者と他車両との両方を対象物として認識するようにしてもよい。
【0094】
また、前記各実施形態では、レーダ電波が近赤外域の波長のレーザ光である場合を例にとって説明したが、レーダ装置2は、ミリ波等の波長域の電磁波をレーダ電波として使用するレーダ装置であってもよい。
【0095】
また、前記実施形態では、撮像画像の色に基づいて、監視領域におけるレーダ電波の反射率の分布を推定するようにしたが、撮像画像の輝度に基づいて、あるいは、色と輝度との両方に基づいて、監視領域におけるレーダ電波の反射率の分布を推定するようにしてもよい。
【0096】
特に、車載カメラが、前記各実施形態におけるレーダ電波と同様に近赤外域に感度を有するカメラである場合には、監視領域における撮像画像の輝度の分布と、該監視領域におけるレーダ電波の反射率の分布との相関性が高まる。従って、画像撮像の輝度に基づいて、監視領域におけるレーダ電波の反射率の分布を高い信頼性で推定することが可能となる。
【0097】
また、前記各実施形態において、監視領域のうち、推定されたレーダ電波の反射率が比較的高い領域又低い領域で対象物の存在が認識された場合に、単一の対象物の一部だけが対象物として認識された可能性があるものとして、該対象物の進行方向前方側の領域における対象物の認識の信頼性が低いものと判断するようにしてもよい。そして、対象物の認識の高低に応じて、運転者に対する報知や警報の仕方、あるいは、車両の制動装置の制御の仕方等を変更するようにしてもよい。
【符号の説明】
【0098】
1…車両、2…レーダ装置、3…車載カメラ、5…反射率推定部(反射率推定手段)、6…受信強度閾値設定部(受信強度閾値設定手段)、7…対象物認識部(対象物認識手段)、STEP11,12…判断手段。
【技術分野】
【0001】
本発明は車両の周辺を監視するためのレーダ装置を備える車両周辺監視装置に関する。
【背景技術】
【0002】
車両の走行支援等を目的として、車両の周辺の所要の監視領域(例えば車両の前方領域)に対するレーダ電波の送信・走査とその反射波の受信とを行なうレーダ装置(レーザレーダやミリ波レーダ等)を車両に搭載し、該レーダ装置で受信されたレーダ電波の反射波に基づいて、車両の周辺の監視領域に存在する他車両や歩行者等の対象物を検知したり、検知した対象物の自車両からの距離や自車両に対する相対速度等を観測する技術が従来より一般に知られている。
【0003】
さらに、例えば特許文献1に見られるように、上記の如きレーダ装置による対象物の検出結果と、車載カメラにより取得した車両の周辺の監視領域の撮像画像とを利用して、該監視領域に存在する対象物の種類を判別する技術が本願出願人により提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−304033号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、レーダ装置は、受信する反射波に含まれる外乱ノイズの影響を排除するために、通常、監視領域のうちの任意の方位角方向へのレーダ電波の送信に対応して、所定の閾値以上の強度の反射波を受信した場合に、その方位角方向に対象物が存在することを検知する。
【0006】
しかるに、他車両等の対象物の表面部は、複数の部品により構成されているため、該対象物の表面部の各部がほぼ一定の同じ反射率でレーダ電波を反射するとは限らず、該対象物の部分部分によって、レーダ電波の反射率のばらつきが比較的大きなものとなる場合も多々ある。
【0007】
このような場合には、単一の対象物のうちの互いには離れた複数の部位からの反射波(所定の閾値以上の強度の反射波)が受信される一方、それらの複数の部位の間の部分からは、所定の閾値以上の反射波が受信されないという状況が生じる場合がある。
【0008】
そして、このような場合には、単一の対象物の複数の部分が、互いに異なる対象物として誤認識される恐れがあった。ひいては、それらの対象物が各別の対象物であるとみなして、運転者に対する報知や車両の運転制御等が行なわれる恐れがあった。
【0009】
本発明はかかる背景に鑑みてなされたものであり、車両周辺の監視領域に存在する対象物を少なくともレーダ装置により検知する場合に、単一の対象物が複数の対象物として誤認識されたり、対象物の局所部分だけが対象物として認識されてしまうようなことを防止し、監視領域に存在する個々の対象物の検知の信頼性を高めることができる車両周辺監視装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の車両周辺監視装置は、上記の目的を達成するために、車両周辺の監視領域に対してレーダ電波を走査すると共に該レーダ電波の反射波を受信し、受信した該反射波に基づいて前記監視領域に存在する対象物を検知するレーダ装置を備えた車両周辺監視装置において、
前記監視領域を撮像する車載カメラと、
該車載カメラの撮像画像の色情報又は輝度情報に基づいて、前記監視領域における前記レーダ電波の反射率の分布を推定する反射率分布推定手段と、
前記推定された反射率の分布に応じて前記監視領域の各局所における前記反射波の受信強度に対する閾値を設定する手段であり、前記監視領域のうちの前記反射率が相対的に小さい局所よりも該反射率が相対的に大きい局所の方が、該閾値が相対的に高くなるように該閾値を設定する受信強度閾値設定手段と、
少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する対象物認識手段とを備えることを特徴とする(第1発明)。
【0011】
かかる第1発明によれば、前記反射率分布推定手段は、車載カメラの撮像画像の色情報又は輝度情報に基づいて、前記レーダ電波を走査する監視領域における前記レーダ電波の反射率の分布を推定する。さらに、推定された反射率の分布に応じて、前記監視領域の各局所における前記反射波の受信強度に対する閾値が前記受信強度閾値設定手段により設定される。
【0012】
この場合、前記監視領域の各局所における上記閾値は、推定された反射率が相対的に小さい局所よりも該反射率が相対的に大きい局所の方が、相対的に高くなるように設定される。従って、前記監視領域に対象物が存在する場合に、各対象物におけるレーダ電波の反射率の大きさが該対象物の部分部分でばらつきを有する場合には、それに合せて、監視領域の居所毎の閾値の高低に差異が生じるように該閾値が設定される。
【0013】
そして、前記対象物認識手段は、少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する。
【0014】
この場合、前記閾値は上記の如く設定されているので、監視領域に存在する実際の単一の対象物が、その部分部分でレーダ電波の反射率がばらつくような場合であっても、該単一の対象物の存在領域内で、レーダ電波の反射波の受信強度が閾値以上となる部分が分散してしまうようなことが防止される。従って、単一の対象物が実際に存在する領域では、そのほぼ全体の領域でのレーダ電波の反射波の受信強度が前記閾値以上になる。
【0015】
このため、前記監視領域に存在する単一の対象物が、前記対象物認識手段によって複数の対象物として検知されてしまうのが防止される。
【0016】
よって、第1発明によれば、単一の対象物が複数の対象物として誤認識されたり、対象物の一部分だけが対象物として認識されてしまうようなことを防止できる。ひいては、監視領域に存在する個々の対象物の検知の信頼性を高めることができる。
【0017】
かかる第1発明では、前記対象物認識手段は、例えば、前記監視領域のうち、前記反射波の受信強度が、前記設定された閾値以上となる局所が連続的に集合する領域のそれぞれを、単一の対象物の存在領域として検知する(第2発明)。
【0018】
この第2発明によれば、前記対象物認識手段は、前記監視領域のうちの、単一の対象物が実際に存在する領域のほぼ全体を単一の対象物の存在領域として検知することができる。
【0019】
上記第1発明において、監視領域に存在する対象物がレーダ電波の反射率が極めて高いような部分を有する場合には、単一の対象物が複数の対象物として誤認識される場合もある。あるいは、該対象物の全体のレーダ電波の反射率が極めて低いものである場合には、監視領域に該対象物が存在しても、該対象物が存在する領域の全体においてレーダ電波の反射波の受信強度が前記閾値よりも下回ってしまう場合もある。
【0020】
そこで、第1発明では、前記対象物認識手段は、前記推定された反射率の分布が、あらかじめ定めた上限値よりも高い値の反射率となる領域を含むという条件と、前記推定された反射率の分布における各局所の反射率の推定値があらかじめ定めた下限値よりも低いという条件とのうちの少なくとも一方の条件が成立するか否かを判断する判断手段をさらに備えており、該判断手段の判断結果が否定的である場合には、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該反射波の受信強度を主要参照情報として用いて前記監視領域における対象物の検知を行い、該判断手段の判断結果が肯定的である場合には、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該撮像画像を主要参照情報として用いて前記監視領域における対象物の検知を行うようにしてもよい(第3発明)。
【0021】
この第3発明によれば、前記推定された反射率の分布が、あらかじめ定めた上限値よりも高い値の反射率となる領域を含むという条件と、前記推定された反射率の分布における各局所の反射率の推定値があらかじめ定めた下限値よりも低いという条件とのうちの少なくとも一方の条件が成立するか否かが前記判断手段により判断される。
【0022】
この場合、この判断手段の判断結果は、レーダ電波の反射波の受信強度に基づく対象物の検知を高い信頼性で行い得るか否かを示す指標としての意味をもつ。
【0023】
そして、前記対象物認識手段は、該判断手段の判断結果が否定的である場合、すなわち、レーダ電波の反射波の受信強度に基づく対象物の検知を高い信頼性で行い得る状況では、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該反射波の受信強度を主要参照情報として用いて前記監視領域における対象物の検知を行う。
【0024】
これによりレーダ電波の反射率が前記上限値及び下限値の間に収まるような適度な反射率を有する対象物が監視領域に存在する場合に、個々の対象物を高い信頼性で、相互に区別して検知できる。
【0025】
一方、該判断手段の判断結果が肯定的である場合、すなわち、前記監視領域に、レーダ電波の反射率が前記上限値よりも高い反射率となる領域が存在する場合、あるいは、該監視領域の各所におけるレーダ電波の反射率が前記下限値よりも低い場合には、レーダ電波の反射波の受信強度に基づく対象物の検知を高い信頼性で行うことが困難となる状況である。このため、この場合には、前記対象物認識手段は、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該撮像画像を主要参照情報として用いて前記監視領域における対象物の検知を行う。
【0026】
これにより、前記レーダ装置による前記反射波の受信強度に基づく対象物の検知の信頼性を確保することが困難となる状況では、車載カメラの撮像画像を主要参照情報として用いて対象物の検知を行なうことで、その検知の信頼性が損なわれるのを防止できる。
【0027】
このように第3発明によれば、前記推定された反射率の分布に基づく前記判断手段の判断結果を、レーダ電波の反射波の受信強度に基づく対象物の検知の信頼性の高低を示す指標として得ることができる。そして、この判断結果に応じて、前記反射波の受信強度と車載カメラの撮像画像とのうちのより信頼性の高い方を主要参照情報として用いて対象物の検知を行なうので、対象物の検知の信頼性を高めることができる。
【0028】
また、本発明の車両周辺監視装置は、車両周辺の監視領域に対してレーダ波のビームを走査すると共に該レーダ波の反射波を受信し、受信した該反射波に基づいて前記監視領域に存在する対象物を検知するレーダ装置を備えた車両周辺監視装置において、
前記監視領域を撮像する車載カメラと、
該車載カメラの撮像画像の色情報又は輝度情報に基づいて、前記監視領域における前記レーダ波の反射率の分布を推定する反射率分布推定手段と、
前記推定された反射率の分布が、あらかじめ定めた上限値よりも高い値の反射率となる領域を含むという条件と、前記推定された反射率の分布における各局所の反射率の推定値があらかじめ定めた下限値よりも低いという条件とのうちの少なくとも一方の条件が成立するか否かを判断する判断手段と、
該判断手段の判断結果が否定的である場合には、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該反射波の受信強度を主要参照情報として用いて前記監視領域における対象物の検知を行い、該判断手段の判断結果が肯定的である場合には、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該撮像画像を主要参照情報として用いて前記監視領域における対象物の検知を行う対象物認識手段とを備えることを特徴とする(第4発明)。
【0029】
この第4発明によれば、前記第1発明と同様に、前記反射率分布推定手段は、車載カメラの撮像画像の色情報又は輝度情報に基づいて、前記レーダ電波を走査する監視領域における前記レーダ電波の反射率の分布を推定する。
【0030】
そして、前記第3発明と同様に、前記推定された反射率の分布が、あらかじめ定めた上限値よりも高い値の反射率となる領域を含むという条件と、前記推定された反射率の分布における各局所の反射率の推定値があらかじめ定めた下限値よりも低いという条件とのうちの少なくとも一方の条件が成立するか否かが前記判断手段により判断される。このため、この判断手段の判断結果は、レーダ電波の反射波の受信強度に基づく対象物の検知を高い信頼性で行い得るか否かを示す指標としての意味をもつ。
【0031】
そして、前記対象物認識手段は、該判断手段の判断結果が否定的である場合、すなわち、レーダ電波の反射波の受信強度に基づく対象物の検知を高い信頼性で行い得る状況では、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該反射波の受信強度を主要参照情報として用いて前記監視領域における対象物の検知を行う。このように前記反射波の受信強度を主要参照情報として用いることで、対象物の検知を適正に行なうことができる。
【0032】
なお、第3発明では、前記反射波の受信強度を主要参照情報として用いて対象物の検知を行なう場合、第1発明又は第2発明と同様に行なうようにしてもよいが、例えば、該受信強度をあらかじめ定めた所定の閾値と比較することで、対象物を検知するようにしてもよい。
【0033】
一方、該判断手段の判断結果が肯定的である場合、すなわち、前記監視領域に、レーダ電波の反射率が前記上限値よりも高い反射率となる領域が存在する場合、あるいは、該監視領域の各所におけるレーダ電波の反射率が前記下限値よりも低い場合には、レーダ電波の反射波の受信強度に基づく対象物の検知を高い信頼性で行うことが困難となる状況である。このため、この場合には、前記対象物認識手段は、前記第3発明と同様に、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該撮像画像を主要参照情報として用いて前記監視領域における対象物の検知を行う。
【0034】
これにより、前記レーダ装置による前記反射波の受信強度に基づく対象物の検知の信頼性を確保することが困難となる状況では、車載カメラの撮像画像を主要参照情報として用いて対象物の検知を行なうことで、その検知の信頼性が損なわれるのを防止できる。
【0035】
このように第4発明によれば、前記第3発明と同様に、前記推定された反射率の分布に基づく前記判断手段の判断結果を、レーダ電波の反射波の受信強度に基づく対象物の検知の信頼性の高低を示す指標として得ることができる。そして、この判断結果に応じて、前記反射波の受信強度と車載カメラの撮像画像とのうちのより信頼性の高い方を主要参照情報として用いて対象物の検知を行なうので、監視領域に存在する個々の対象物の検知の信頼性を高めることができる。
【0036】
なお、第3発明又は第4発明では、前記判断手段の判断結果が否定的である場合に、車載カメラの撮像画像を補完的な参照情報として用いて対象物を検知するようにしてもよいことはもちろんであるが、車載カメラの撮像画像を用いることなく、レーダ装置による反射波の受信強度に基づいて対象物の検知を行なうようにしてもよい。
【0037】
逆に、前記判断手段の判断結果が肯定的である場合に、レーダ装置による反射波の受信強度を補完的な参照情報として用いて対象物を検知するようにしてもよいことはもちろんであるが、レーダ装置による反射波の受信強度を用いることなく、車載カメラの撮像画像だけに基づいて対象物の検知を行なうようにしてもよい。
【図面の簡単な説明】
【0038】
【図1】本発明の実施形態における車両を示す斜視図。
【図2】図1の車両に備えた車両周辺監視装置の構成を示すブロック図。
【図3】図1の車両に備えたレーダ装置によるレーダ電波の走査形態を示す図。
【図4】図2に示す演算処理ユニットの第1実施形態における処理を示すフローチャート。
【図5】図4のSTEP1の処理を説明するための図。
【図6】図6(a),(b)は図4のSTEP3、4の処理を説明するための図。
【図7】図2に示す対象物認識部の第2実施形態における処理を示すフローチャート。
【発明を実施するための形態】
【0039】
[第1実施形態]
本発明の第1実施形態を図1〜図6を参照して以下に説明する。
【0040】
図1及び図2に示すように、本実施形態の車両周辺監視装置は、車両1にそれぞれ搭載されたレーダ装置2、車載カメラ3及び演算処理ユニット4を備える。この車両周辺監視装置による車両1の周辺の監視領域は、車両1の前方領域である。このため、レーダ装置2及び車載カメラ3は車両1の前部に搭載されている。
【0041】
レーダ装置2は、本実施形態では、例えば近赤外域の波長のレーザ光をレーダ電波として使用するレーザレーダである。このレーダ装置2は、図3に示すように、レーダ電波(レーザ光)のビームBMを、車両1の前方の監視領域(図中の直線L1,L2の間の領域)の各所に送信し、そのビームBMの送信方向に存在する対象物によるレーダ電波の反射波を受信する。
【0042】
この場合、レーダ装置2は、走査型のレーダであり、レーダ電波のビームBMの送信方向(方位角)をヨー軸周り方向に一定角度ずつ変化させていくことで、監視領域に対してレーダ電波のビームBMを、車両1の走行路面にほぼ平行な走査面上で走査する。そして、レーダ装置2は、レーダ電波のビームBMの各送信方向毎に、送信したレーダ電波の反射波の受信を行なう。
【0043】
車載カメラ3は、CCDカメラ又はCMOSカメラ等から成る撮像カメラであり、上記監視領域を含む撮像領域の画像を撮像するように車両1に搭載されている。この車載カメラ3の撮像画像は、本実施形態では、カラー画像である。
【0044】
演算処理ユニット4は、CPU、RAM、ROM、インターフェイス回路等により構成された電子回路ユニットである。この演算処理ユニット4には、レーダ装置2が受信した反射波の受信信号と車載カメラの撮像画像の映像信号とが入力され、これらの信号が、A/D変換されて演算処理ユニット4に取り込まれる。
【0045】
そして、演算処理ユニット4は、入力されたデータを基に、車両1の前方に存在する所定種類の対象物を認識し、自車両1からの対象物までの距離や、自車両1に対する対象物までの相対速度を推定する。さらに、演算処理ユニット4は、自車両1からの対象物までの距離や、自車両1に対する対象物までの相対速度等を基に、認識した対象物と自車両1の接触の可能性を判断し、運転者に対する警報もしくは報知は、音声情報や視覚情報によって行なったり、自車両1の制動制御等を行う。
【0046】
以降、対象物として、例えば他車両(対向車又は先行車)を演算処理ユニット4で認識する場合を例にとって、該演算処理ユニット4が実行する対象物の認識処理を説明する。
【0047】
演算処理ユニット4は、本発明に関連する機能として、反射率推定部5、受信強度閾値設定部6及び対象物認識部7を備えている。これらの各機能部は、実装されたプログラム等により実現される機能であり、それぞれ、本発明における反射率分布推定手段、受信強度閾値設定手段、対象物認識手段に相当している。
【0048】
以下に、これらの各機能物の処理の詳細を含めて、演算処理ユニット4で対象物(ここでは他車両)を認識する場合の処理を説明する。
【0049】
演算処理ユニット4は、対象物としての他車両を認識する場合に、図4のフローチャートに示す処理を実行する。
【0050】
具体的には、演算処理ユニット4は、まず、STEP1の処理を実行する。このSTEP1では、演算処理ユニット4は、レーダ装置2によるレーダ電波の反射波の受信信号に基づいて、レーダ電波のビームBMの各送信方向に物体(送信したレーダ電波を反射する物体)が存在するか否かを検知すると共に、物体が存在することが検知された各送信方向において、該物体の自車両1に対する相対速度を推定する。そして、演算処理ユニット4は、その推定した相対速度を基に、レーダ電波のビームBMの各送信方向に存在する物体が所定種類の対象物としての他車両であるか否かを判定する。
【0051】
ここで、レーダ電波のビームBMの各送信方向に物体が存在するか否かは、その送信方向におけるレーダ電波の反射波の受信強度が所定値以上であるか否かによって検知される。また、レーダ電波のビームBMの各送信方向に存在する物体の相対速度は、送信したレーザ電波と受信した反射波との間のドップラーシフト等に基づく公知の手法によって推定される。なお、該相対速度の推定処理は、レーダ装置2で行なうようにしてもよい。
【0052】
そして、演算処理ユニット4は、レーダ電波のビームBMの各送信方向毎に、推定した相対速度が、“0”もしくはその近辺の速度である場合に、当該送信方向に他車両としての前走車が存在すると判定する。また、演算処理ユニット4は、推定した相対速度が、自車両1の車速の2倍の速度もしくはその近辺の速度である場合に、当該送信方向に他車両としての対向車が存在すると判定する。
【0053】
これにより、レーダ電波の各送信方向毎に、その送信方向に対象物としての他車両が存在するか否かが認識されることとなる。例えば、図5に示す状況では、自車両1から前走車に向うレーダ電波の送信方向と、自車両1から対向車に向うレーダ電波の送信方向とに、他車両が存在することが認識されることとなる。
【0054】
なお、STEP1の処理では、レーダ電波の互いに異なる送信方向に存在する他車両が互いに同一の他車両であるか否かの判断は行なわれない。また、STEP1の処理では、レーダ電波のビームBMの各送信方向毎の反射波の受信強度(A/D変換後のデジタルデータ)は、演算処理ユニット4の記憶装置に記憶保持される。
【0055】
次いで、演算処理ユニット4は、STEP2の処理を実行する。このSTEP2では、演算処理ユニット4は、車載カメラ3の撮像画像(レーダ装置2によりレーダ電波の走査を行なった時刻もしくはその近辺の時刻での撮像画像)を取得する。その撮像画像は、演算処理ユニット4の記憶装置に記憶保持される。
【0056】
次いで、演算処理ユニット4は、反射率推定部5によりSTEP3の処理を実行する。このSTEP3では、反射率推定部5は、STEP2で取得した撮像画像を基に、レーダ電波の走査を行なう監視領域で車両1の前方に存在する物体におけるレーダ電波の反射率の分布を推定する。該反射率の分布は、より詳しくは、レーダ電波の走査方向(撮像画像の横方向)での分布である。
【0057】
ここで、本実施形態では、レーダ電波は、近赤外域の波長のレーザ光であり、種々の物体におけるこのレーダ電波の反射率は、一般に、可視光の反射率と近似したものとなる。すなわち、近赤外域の波長のレーザ光であるレーダ電波の反射率は、物体の色合いに応じて変化する傾向があり、物体の色合いが、黒色に近い場合よりも、白色に近い場合の方が、その物体におけるレーダ電波の反射率が相対的に高くなる傾向がある。
【0058】
また、監視領域に存在する物体は、車載カメラ3の撮像画像にカラー画像として投影されるので、この撮像画像によって、監視領域の各局所の色を認識できる。
【0059】
そこで、本実施形態では、反射率推定部5は、監視領域でのレーダ電波の反射率の分布を、該レーダ電波の走査面に対応する撮像画像の横方向のライン(以降、画像上走査ラインという)上で画像色に基づいて、レーダ電波の反射率の分布を推定する。
【0060】
この場合、画像上走査ライン上の各位置でのレーダ電波の反射率の推定値は、その各位置の近辺の局所域での画像の平均的な色に応じて、あらかじめ定められたデータテーブル(反射率と色との関係を示すデータテーブル)を用いて決定される。なお、画像上走査ライン上の各位置でのレーダ電波の反射率の推定値は、実空間で言えば、車載カメラ3の光学中心から撮像画像の撮像面における画像上走査ライン上の各点に向う直線の方向で車両1の前方に存在する物体の反射率の推定値に相当する。
【0061】
このように推定される反射率の分布の具体的な例を図6(a),(b)を参照して説明する。図6(a),(b)は、それぞれ監視領域に他車両が存在する状況を想定しており、それぞれの最上段の図は、他車両の撮像画像の模式化して示している。この場合、図6(a)に示す他車両は、レーダ電波(近赤外域のレーザ光)が反射され難い色、例えば黒色の車体色を有する車両であるとしている。また、図6(b)に示す他車両は、レーダ電波を比較的反射しやすい色、例えば白色の車体色を有する車両であるとしている。なお、最上段の図における一点鎖線のラインLaはレーダ電波の画像上走査ラインである。
【0062】
図6(a)の例では、画像上走査ラインLa上でのレーダ電波の反射率の推定値の分布は、例えば、図6(a)の中段のグラフで示すようなパターンの分布とされる。この場合、A1、A3、A5の領域は、レーダ電波を反射し難い黒色の車体色に対応する領域である。これらの領域A1、A3、A5に対応する反射率の推定値は、低い値とされる。
【0063】
また、A2、A4の領域は、他車両のランプ(テールランプ)に対応する領域であり、例えば赤系統の色の領域である。そして、これらの領域A2、A4に対応する反射率の推定値は、高い値とされる。
【0064】
一方、図6(b)の例では、画像上走査ラインLa上でのレーダ電波の反射率の推定値の分布は、例えば、図6(b)の中段のグラフで示すようなパターンの分布とされる。この場合、B1、B3、B5の領域は、レーダ電波を比較的反射しやすい白色の車体色に対応する領域である。これらの領域B1、B3、B5に対応する反射率の推定値は、比較的高い値(図6(a)のA1、A3、A5の領域よりも高い値)とされる。
【0065】
また、B2、B4の領域は、他車両のランプ(テールランプ)に対応する領域であり、図6(a)のA2、A4の領域と同様に、例えば赤系統の色の領域である。従って、これらの領域B2、B4に対応する反射率の推定値は、図6(a)のA2,A4の領域と同様に高い値に設定される。この領域B2、B4に対応する反射率の推定値は、本実施形態では、B1、B3、B5の領域よりも高い値である。
【0066】
次いで、演算処理ユニット4は、受信強度閾値設定部6によりSTEP4の処理を実行する。このSTEP4では、受信強度閾値設定部6は、STEP3で推定したレーダ電波の反射率の分布に応じて、あらかじめ設定されたデータテーブル又は演算式(レーダ電波の反射率と閾値との関係を規定するデータデーブル又は演算式)を用いて、車両1の前方の監視領域の局所毎(レーダ電波のビームBMの各送信方向に対応する局所毎)に、レーダ装置2が受信する反射波の受信強度に対する閾値(以降、受信強度閾値という)を設定する。
【0067】
この場合、レーダ電波の走査方向の各位置での受信強度閾値は、その位置での反射率の推定値が高いほど、該受信強度閾値が大きくなるように設定される。例えば図6(a)に示す例では、図6(a)の最下段の図の破線で示す如く、レーダ電波の反射率の推定値の分布パターン(図6(a)の中段図)と同様の分布パターンでレーダ電波の走査方向の各位置(ビームBMの各送信方向)に対応する受信強度閾値が設定される。
【0068】
また、図6(b)に示す例では、図6(b)の最下段の図の破線で示す如く、レーダ電波の反射率の推定値の分布パターン(図6(b)の中段図)と同様の分布パターンでレーダ電波の走査方向の各位置(ビームBMの各送信方向)に対応する受信強度閾値が設定される。
【0069】
従って、図6(a)の領域A1,A3,A5(黒色の車体色に対応する領域)で設定される受信強度閾値は、図6(b)の領域B1,B3,B5(白色の車体色に対応する領域)で設定される受信強度閾値よりも小さい値とされる。
【0070】
次いで、演算処理ユニット4は、対象物認識部7によりSTEP5の処理を実行する。このSTEP5では、対象物認識部7は、レーダ電波のビームBMの各送信方向に対応する監視領域の各位置(走査方向での位置)での反射波の実際の受信強度(STEP1で記憶保持された受信強度)を、STEP4で設定された受信強度閾値と比較し、車両1の前方の監視領域において、反射波の実際の受信強度が、受信強度閾値以上となる局所を抽出する。
【0071】
そして、対象物認識部7は、監視領域のうち、反射波の実際の受信強度が、受信強度閾値以上となる局所がレーダ電波の走査方向で連続的に集合する領域(ただし、該走査方向で所定の下限幅以上の幅を有する領域)を、単一の対象物(他車両)が存在する領域として決定することで、対象物の物標化を行なう。ここで、実際の受信強度が、受信強度閾値以上となる局所がレーダ電波の走査方向で連続的に集合する領域というのは、その領域の各所(走査方向での各所)における実際の受信強度が、受信強度閾値以上となる領域である。
【0072】
例えば図6(a)及び図6(b)に示した状況では、それぞれ、図中に示した対象物存在領域(他車両とほぼ同等の幅を有する領域)が、単一の他車両が存在する領域として決定される。
【0073】
ここで、仮に、受信強度閾値をあらかじめ定めた一定値とした場合には、監視対象の対象物が、レーダ電波の反射率が部分部分で比較的大きく異なるような対象物である場合に、単一の対象物が、複数の対象物として誤認識される場合がある。例えば、受信強度閾値を、図6(a),(b)の最下段の図の二点鎖線Sで示す如く設定した場合には、図6(a)に示す他車両では、実際の受信強度が受信強度閾値以上となる領域が、2つに分離してしまうため、単一の対象物(他車両)が2つの対象物として誤認識されてしまう。
【0074】
これに対して、本実施形態では、反射率の推定値に応じて受信強度閾値を変化させるので、監視対象の単一の対象物(他車両)が、複数の対象物として誤認識されるようなことを防止して、単一の対象物として正しく認識することができることとなる。
【0075】
なお、STEP5の処理では、レーダ電波の反射波の実際の受信強度だけでなく、必要に応じて車載カメラ3の撮像画像を補完的な参照情報として用いて監視領域に存在する対象物(他車両)の検知を行なうようにしてもよい。
【0076】
本実施形態では、演算処理ユニット4は、以上の如く認識した各対象物(他車両)について、該対象物からの反射波の受信信号に基づいて、該対象物の自車両1からの距離を推定する。その距離推定は、例えばレーダ電波の送受信の時間差等に基づく公知の手法によって行なわれる。そして、該対象物の自車両1に対する相対速度や自車両1からの距離に基づいて、該対象物と自車両1との接触の可能性を予測し、その予測結果に応じた警報もしくは報知を運転者に対して行なったり、あるいは、車両1の制動装置の制御等を行なう。
【0077】
かかる本実施形態によれば、各対象物でのレーダ電波の反射率が部分部分でばらつきを生じる場合であっても、単一の対象物を、複数の対象物として誤認識るようなことを防止しつつ、レーダ電波の反射波の受信強度に基づいて、車両1の前方の監視領域に存在する各対象物を認識することができる。
【0078】
[第2実施形態]
次に、本発明の第2実施形態を図7を参照して説明する。なお、本実施形態は、演算処理ユニット4の対象物認識部7の処理だけが第1実施形態と相違するので、その相違点を中心に説明し、第1実施形態と同一の事項については説明を省略する。
【0079】
レーダ電波のビームBMの送信方向に存在する対象物が、該レーダ電波の反射率が極めて高い対象物である場合、その対象物が単一であっても、レーダ電波の反射波の散乱等に起因して複数の対象物が存在するように認識されてしまう場合がある。
【0080】
また、レーダ電波のビームBMの送信方向に存在する対象物が、該レーダ電波の反射率が極めて低い対象物である場合、レーダ装置2による該反射波の受信強度が低くなるために、該受信強度に基づく対象物の存在の認識を高い信頼性で行なうことが困難となる場合もある。
【0081】
そこで、本実施形態では、演算処理ユニット4の対象物認識部7は、図7の処理を実行する。すなわち、対象物認識部7は、まず、STEP11,12の判断処理を実行する。STEP11では、対象物認識部7は、前記STEP3で反射率推定部5により推定された反射率の分布において、該反射率の推定値があらかじめ定められた所定の上限値よりも高い領域が含まれるか否かを判断する。
【0082】
また、STEP12では、対象物認識部7は、前記STEP3で反射率推定部5により推定された反射率の分布における各位置(レーダ電波のビームBMの各送信方向に対応する位置)での反射率の推定値があらかじめ定められた所定の下限値よりも低いか否か(換言すれば、推定された反射率の分布における全ての反射率の推定値が所定の下限値よりも低いか否か)を判断する。
【0083】
なお、STEP11,12の判断処理は、本発明における判断手段に相当するものである。
【0084】
そして、対象物認識部7は、STEP11,12の両方の判断結果が否定的となる場合には、第1実施形態と同様に、第1実施形態における対象物認識部7の処理と同様に、レーダ電波の反射波の受信強度に基づいて、車両1の前方の監視領域に存在する個々の対象物(他車両)を認識する。
【0085】
従って、監視領域におけるレーダ電波の反射率の分布状態が、レーダ電波の反射波の受信強度に基づく対象物の検知を高い信頼性で行ない得るような分布状態である場合には、第1実施形態における対象物認識部7の処理と同様に、レーダ電波の反射波の受信強度に基づいて監視領域に存在する個々の対象物(他車両)が互いに区別して認識されることとなる。
【0086】
一方、STEP11,12のいずれかの判断結果が肯定的となる場合には、反射波の受信強度に基づく対象物の認識を高い信頼性で行なうことが困難となることから、対象物認識部7は、車載カメラ3の撮像画像(前記STEP2で取得した撮像画像)に基づいて、前記画像上走査ラインLa上に存在する各対象物(他車両)を認識する。この場合、対象物認識部7は、例えば撮像画像から、対象物(他車両)に特徴的な形状部分を該対象物の存在領域として抽出する。
【0087】
以上が本実施形態における対象物認識部7の処理である。本実施形態は、以上説明した事項以外は、前記第1実施形態と同じである。
【0088】
かかる本実施形態によれば、前記STEP11,12のいずれかの判断結果が肯定的となる場合に、撮像画像を用いて対象物の認識を行なうので、レーダ電波の反射波の受信強度に基づく対象物の認識を高い信頼性で行なうことが困難となる状況でも、個々の対象物を適正に認識することができる。
【0089】
また、前記STEP11,12の両方の判断結果が否定的となる場合には、レーダ電波の反射波の受信強度に基づいて、個々の対象物を正しく区別しつつ、車両1の前方の監視領域に存在する各対象物を認識することができる。
【0090】
なお、前記第2実施形態では、STEP11,12の両方の判断結果が否定的となる場合に、レーダ電波の反射率の推定値の分布に応じて設定した受信強度閾値を用いて監視領域に存在する対象物を認識するようにしたが、受信強度閾値設定部6の処理(STEP4の処理)を省略し、反射波の受信強度をあらかじめ定めた閾値と比較することで、監視領域に存在する対象物を認識するようにしてもよい。
【0091】
また、前記第2実施形態において、STEP11、12のいずれか一方の判断処理を省略するようにしてもよい。
【0092】
また、前記第2実施形態におけるSTEP13の処理では、レーダ電波の反射波の受信強度だけでなく、必要に応じて、車載カメラ3の撮像画像を補完的な参照情報として用いて、監視領域に存在する対象物を認識するようにしてもよい。同様に、STEP14の処理では、車載カメラ3の撮像画像だけでなく、必要に応じてレーダ電波の反射波の受信強度を補完的な参照情報としても用いて、監視領域に存在する対象物を認識するようにしてもよい。
【0093】
また、前記各実施形態では、監視領域に存在する他車両を対象物として認識する場合を例にとって説明したが、例えば歩行者を対象物として認識するようにしてもよく、あるいは、歩行者と他車両との両方を対象物として認識するようにしてもよい。
【0094】
また、前記各実施形態では、レーダ電波が近赤外域の波長のレーザ光である場合を例にとって説明したが、レーダ装置2は、ミリ波等の波長域の電磁波をレーダ電波として使用するレーダ装置であってもよい。
【0095】
また、前記実施形態では、撮像画像の色に基づいて、監視領域におけるレーダ電波の反射率の分布を推定するようにしたが、撮像画像の輝度に基づいて、あるいは、色と輝度との両方に基づいて、監視領域におけるレーダ電波の反射率の分布を推定するようにしてもよい。
【0096】
特に、車載カメラが、前記各実施形態におけるレーダ電波と同様に近赤外域に感度を有するカメラである場合には、監視領域における撮像画像の輝度の分布と、該監視領域におけるレーダ電波の反射率の分布との相関性が高まる。従って、画像撮像の輝度に基づいて、監視領域におけるレーダ電波の反射率の分布を高い信頼性で推定することが可能となる。
【0097】
また、前記各実施形態において、監視領域のうち、推定されたレーダ電波の反射率が比較的高い領域又低い領域で対象物の存在が認識された場合に、単一の対象物の一部だけが対象物として認識された可能性があるものとして、該対象物の進行方向前方側の領域における対象物の認識の信頼性が低いものと判断するようにしてもよい。そして、対象物の認識の高低に応じて、運転者に対する報知や警報の仕方、あるいは、車両の制動装置の制御の仕方等を変更するようにしてもよい。
【符号の説明】
【0098】
1…車両、2…レーダ装置、3…車載カメラ、5…反射率推定部(反射率推定手段)、6…受信強度閾値設定部(受信強度閾値設定手段)、7…対象物認識部(対象物認識手段)、STEP11,12…判断手段。
【特許請求の範囲】
【請求項1】
車両周辺の監視領域に対してレーダ電波を走査すると共に該レーダ電波の反射波を受信し、受信した該反射波に基づいて前記監視領域に存在する対象物を検知するレーダ装置を備えた車両周辺監視装置において、
前記監視領域を撮像する車載カメラと、
該車載カメラの撮像画像の色情報又は輝度情報に基づいて、前記監視領域における前記レーダ電波の反射率の分布を推定する反射率分布推定手段と、
前記推定された反射率の分布に応じて前記監視領域の各局所における前記反射波の受信強度に対する閾値を設定する手段であり、前記監視領域のうちの前記反射率が相対的に小さい局所よりも該反射率が相対的に大きい局所の方が、該閾値が相対的に高くなるように該閾値を設定する受信強度閾値設定手段と、
少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する対象物認識手段とを備えることを特徴とする車両周辺監視装置。
【請求項2】
請求項1記載の車両周辺監視装置において、
前記対象物認識手段は、前記監視領域のうち、前記反射波の受信強度が、前記設定された閾値以上となる局所が連続的に集合する領域のそれぞれを、単一の対象物の存在領域として検知することを特徴とする車両周辺監視装置。
【請求項3】
請求項1記載の車両周辺監視装置において、
前記対象物認識手段は、前記推定された反射率の分布が、あらかじめ定めた上限値よりも高い値の反射率となる領域を含むという条件と、前記推定された反射率の分布における各局所の反射率の推定値があらかじめ定めた下限値よりも低いという条件とのうちの少なくとも一方の条件が成立するか否かを判断する判断手段をさらに備えており、該判断手段の判断結果が否定的である場合には、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該反射波の受信強度を主要参照情報として用いて前記監視領域における対象物の検知を行い、該判断手段の判断結果が肯定的である場合には、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該撮像画像を主要参照情報として用いて前記監視領域における対象物の検知を行うことを特徴とする車両周辺監視装置。
【請求項4】
車両周辺の監視領域に対してレーダ波のビームを走査すると共に該レーダ波の反射波を受信し、受信した該反射波に基づいて前記監視領域に存在する対象物を検知するレーダ装置を備えた車両周辺監視装置において、
前記監視領域を撮像する車載カメラと、
該車載カメラの撮像画像の色情報又は輝度情報に基づいて、前記監視領域における前記レーダ波の反射率の分布を推定する反射率分布推定手段と、
前記推定された反射率の分布が、あらかじめ定めた上限値よりも高い値の反射率となる領域を含むという条件と、前記推定された反射率の分布における各局所の反射率の推定値があらかじめ定めた下限値よりも低いという条件とのうちの少なくとも一方の条件が成立するか否かを判断する判断手段と、
該判断手段の判断結果が否定的である場合には、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該反射波の受信強度を主要参照情報として用いて前記監視領域における対象物の検知を行い、該判断手段の判断結果が肯定的である場合には、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該撮像画像を主要参照情報として用いて前記監視領域における対象物の検知を行う対象物認識手段とを備えることを特徴とする車両周辺監視装置。
【請求項1】
車両周辺の監視領域に対してレーダ電波を走査すると共に該レーダ電波の反射波を受信し、受信した該反射波に基づいて前記監視領域に存在する対象物を検知するレーダ装置を備えた車両周辺監視装置において、
前記監視領域を撮像する車載カメラと、
該車載カメラの撮像画像の色情報又は輝度情報に基づいて、前記監視領域における前記レーダ電波の反射率の分布を推定する反射率分布推定手段と、
前記推定された反射率の分布に応じて前記監視領域の各局所における前記反射波の受信強度に対する閾値を設定する手段であり、前記監視領域のうちの前記反射率が相対的に小さい局所よりも該反射率が相対的に大きい局所の方が、該閾値が相対的に高くなるように該閾値を設定する受信強度閾値設定手段と、
少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する対象物認識手段とを備えることを特徴とする車両周辺監視装置。
【請求項2】
請求項1記載の車両周辺監視装置において、
前記対象物認識手段は、前記監視領域のうち、前記反射波の受信強度が、前記設定された閾値以上となる局所が連続的に集合する領域のそれぞれを、単一の対象物の存在領域として検知することを特徴とする車両周辺監視装置。
【請求項3】
請求項1記載の車両周辺監視装置において、
前記対象物認識手段は、前記推定された反射率の分布が、あらかじめ定めた上限値よりも高い値の反射率となる領域を含むという条件と、前記推定された反射率の分布における各局所の反射率の推定値があらかじめ定めた下限値よりも低いという条件とのうちの少なくとも一方の条件が成立するか否かを判断する判断手段をさらに備えており、該判断手段の判断結果が否定的である場合には、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該反射波の受信強度を主要参照情報として用いて前記監視領域における対象物の検知を行い、該判断手段の判断結果が肯定的である場合には、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該撮像画像を主要参照情報として用いて前記監視領域における対象物の検知を行うことを特徴とする車両周辺監視装置。
【請求項4】
車両周辺の監視領域に対してレーダ波のビームを走査すると共に該レーダ波の反射波を受信し、受信した該反射波に基づいて前記監視領域に存在する対象物を検知するレーダ装置を備えた車両周辺監視装置において、
前記監視領域を撮像する車載カメラと、
該車載カメラの撮像画像の色情報又は輝度情報に基づいて、前記監視領域における前記レーダ波の反射率の分布を推定する反射率分布推定手段と、
前記推定された反射率の分布が、あらかじめ定めた上限値よりも高い値の反射率となる領域を含むという条件と、前記推定された反射率の分布における各局所の反射率の推定値があらかじめ定めた下限値よりも低いという条件とのうちの少なくとも一方の条件が成立するか否かを判断する判断手段と、
該判断手段の判断結果が否定的である場合には、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該反射波の受信強度を主要参照情報として用いて前記監視領域における対象物の検知を行い、該判断手段の判断結果が肯定的である場合には、前記レーダ装置による前記反射波の受信強度と前記車載カメラの撮像画像とのうちの該撮像画像を主要参照情報として用いて前記監視領域における対象物の検知を行う対象物認識手段とを備えることを特徴とする車両周辺監視装置。
【図1】



【図2】

【図3】
【図4】

【図5】
【図6】

【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−19684(P2013−19684A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2011−150880(P2011−150880)
【出願日】平成23年7月7日(2011.7.7)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成23年7月7日(2011.7.7)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]