
車両周辺監視装置
【課題】ピッチ検出器を用いることなく、単眼カメラによる構成においてもピッチング補正を行うことができる機能を備えた車両周辺監視装置を提供する。
【解決手段】車両周辺監視装置は、所定の制御周期毎に、車両に搭載されたカメラによる撮像画像を取得し、今回の制御周期での撮像画像の前回の制御周期からの変位量を算出し、該変位量を用いて車両の挙動に起因する撮像画像の変位分を相殺するためのピッチング補正値を算出し、今回の撮像画像に対して、ピッチング補正値による補正を行った補正画像を生成し、補正画像から対象物を検出する。変位量は、撮像画像から、地平線より上側の所定領域、地平線を含み地平線より下側から上側までの所定領域、又は自車両から所定距離内の先行車両を含む所定領域を監視領域として切出し、今回の制御周期における撮像画像の監視領域と前回の制御周期における撮像画像の監視領域間で求める。
【解決手段】車両周辺監視装置は、所定の制御周期毎に、車両に搭載されたカメラによる撮像画像を取得し、今回の制御周期での撮像画像の前回の制御周期からの変位量を算出し、該変位量を用いて車両の挙動に起因する撮像画像の変位分を相殺するためのピッチング補正値を算出し、今回の撮像画像に対して、ピッチング補正値による補正を行った補正画像を生成し、補正画像から対象物を検出する。変位量は、撮像画像から、地平線より上側の所定領域、地平線を含み地平線より下側から上側までの所定領域、又は自車両から所定距離内の先行車両を含む所定領域を監視領域として切出し、今回の制御周期における撮像画像の監視領域と前回の制御周期における撮像画像の監視領域間で求める。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に設けられたカメラによる撮像画像から、車両周辺の監視対象物を検出する車両周辺監視装置に関する。
【背景技術】
【0002】
車両に設けられたカメラを用いて走行中に車両周辺を監視する場合、ピッチング(鉛直方向の車両の揺れ)等によりカメラの視軸が変位したときであっても、監視対象物を安定して検出できることが望ましい。
【0003】
そこで、ジャイロセンサ等のピッチ検出器を車両に備えて、このピッチ検出器により検出した鉛直方向の変位量により、ピッチングによる画像のずれ量を補正するようにした移動車の環境認識装置が提案されている(例えば、特許文献1参照)。
【0004】
また、車両に備えられたステレオカメラによる撮像画像の視差に基いて、自車両と対象物との距離を算出し、この距離のサンプル周期毎の変化から自車両と対象物の相対速度及び相対加減速度を算出して、所定量以上のピッチング変化が生じたことを判定するようにした車両用距離測定装置が提案されている(例えば、特許文献2参照)。この車両用距離測定装置においては、自車両と対象物との相対加速度に基づいてピッチングの程度に応じた画像位置の補正量を算出している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平3−118611号公報
【特許文献2】特開平11−51645号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述した特許文献1に記載された構成によりピッチング補正を行うためには、ピッチ検出器が必要になるため、装置のコストがアップすると共に、装置の構成が複雑になるという不都合がある。さらに、ピッチ検出器により検出された変位量を撮像画像に反映させて補正をするタイミングのずれにより、ピッチング補正が不適切なものとなるおそれがある。
【0007】
また、上記特許文献2に記載された構成は、ステレオカメラによる対象物との距離を測定するものであるため、単眼カメラによる構成には適用できないという不都合がある。
【0008】
そこで、本発明は、ピッチ検出器を用いることなく、単眼カメラによる構成においてもピッチング補正を行うことができる機能を備えた車両周辺監視装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
第1発明の車両周辺監視装置は、所定の制御周期毎に、車両に搭載されたカメラによる撮像画像を取得する画像取得部と、今回の制御周期での撮像画像の前回の制御周期からの変位量を算出し、該変位量を用いて車両の挙動に起因する撮像画像の変位分を相殺するためのピッチング補正値を算出するピッチング補正値算出部と、今回の撮像画像に対して、前記ピッチング補正値による補正を行った補正画像を生成する補正画像生成部と、前記補正画像から対象物を検出する対象物検出部とを備え、前記ピッチング補正値算出部は、撮像画像から、地平線より上側の所定領域、地平線を含み地平線より下側から上側までの所定領域、又は自車両から所定距離内の先行車両を含む所定領域を監視領域として切出し、今回の制御周期における撮像画像の監視領域と前回の制御周期における撮像画像の監視領域間で前記変位量を求めることを特徴とする。
【0010】
第1発明によれば、ピッチ検出器を用いることなく、単眼カメラによる構成においてもピッチング補正を行うことができる。
【0011】
第2発明の車両周辺監視装置は、第1発明において、前記ピッチング補正値算出部は、前回の制御周期での撮像画像の監視領域と今回の制御周期での撮像画像の監視領域とにおける上下移動しない対象物の画像部分の相対変位量の相関値に基づいて、前記変位量を算出することを特徴とする。
【図面の簡単な説明】
【0012】
【図1】車両周辺監視装置の構成図。
【図2】車両周辺監視処理のフローチャート。
【図3】ピッチング補正値による撮像画像の補正の説明図。
【図4】ピッチング補正値算出処理のフローチャート。
【図5】監視領域の設定態様の説明図。
【図6】位相相関関数の逆フーリエ変換マップに対する変位量の座標系の再配置の説明図。
【図7】改良した位相相関関数を用いることによる効果の説明図。
【図8】改良した位相相関関数を用いた場合の検証データ。
【図9】他の改良した位相相関関数を用いることによる効果の説明図。
【発明を実施するための形態】
【0013】
本発明の実施形態について、図1〜図9を参照して説明する。
【0014】
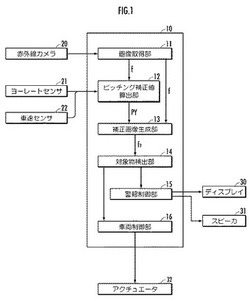
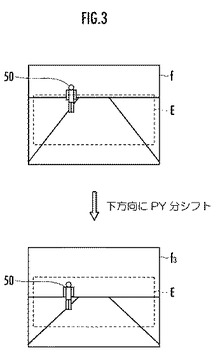
図1を参照して、本実施形態の車両周辺監視装置は車両に搭載して使用され、ECU(Electronic Control Unit)10と、ECU10に接続された赤外線カメラ20(本発明のカメラに相当する)、ヨーレートセンサ21、車速センサ22、ディスプレイ30、スピーカ31、及びアクチュエータ32とにより構成されている。
【0015】
ECU10は図示しないCPU、メモリ等により構成された電子ユニットであり、メモリに保持された車両周辺監視用プログラムをCPUに実行させることによって、ECU10は、所定の制御周期毎に赤外線カメラ20による撮像画像を取り込む画像取得部11、画像取得部11により取得された今回の制御周期での撮像画像fについて、車両挙動による変位量を相殺するためのピッチング補正値PYを算出するピッチング補正値算出部12、ピッチング補正値PYにより撮像画像fを補正した補正画像f3を生成する補正画像生成部13、補正画像f3から対象物(歩行者等)を検出する対象物検出部14、警報対象となる対象物が検出されたときにディスプレイ30とスピーカ31による警報を行う警報制御部15、及び対象物との接触を回避するためにアクチュエータ32(ブレーキ機構、操舵機構等)を作動させる車両制御部16として機能する。
【0016】
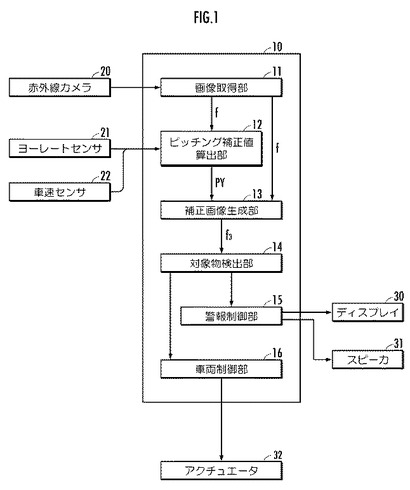
次に、図2に示したフローチャートに従って、ECU10による車両周辺監視処理の実行手順について説明する。ECU10は、運転者による車両周辺監視処理の開始操作がなされたときに、図2に示したフローチャートによる車両周辺開始処理を開始する。
【0017】
ECU10は、STEP1で初期化処理を行った後、STEP10で運転者による車両周辺監視処理の停止操作がなされるまで、STEP2〜STEP9の処理を所定の制御周期により繰り返し実行する。STEP2は画像取得部11による処理であり、画像取得部11は、赤外線カメラ20から出力される1フレーム分のアナログの映像信号をデジタル信号に変更して画像メモリ(図示しない)に保持する。
【0018】
続くSTEP3〜STEP6は、ピッチング補正値算出部12及び補正画像生成部13による処理である。ピッチング補正値算出部12は、STEP3で車速センサ22による検出速度から走行停止中でないと判断され、且つ、STEP4でヨーレートセンサ21により車両が旋回中でないと判断されたときに、STEP5で車両挙動(ピッチング等)に起因する撮像画像の変位分を補正するためのピッチング補正値PYを算出する。ピッチング補正値PYは、撮像画像の変位分を相殺するためのシフト量(ピクセル値)である。
【0019】
また、補正画像生成部13は、STEP3で車速センサ22による検出速度から走行中であると判断され、且つ、STEP4でヨーレートセンサ21により車両が旋回中でないと判断されて、STEP5でピッチング補正値算出部12によりピッチング補正値PYが算出されたときに、今回の撮像画像f1をピッチング補正値PY分シフトさせて補正画像f3を生成し、STEP7に進む。
【0020】
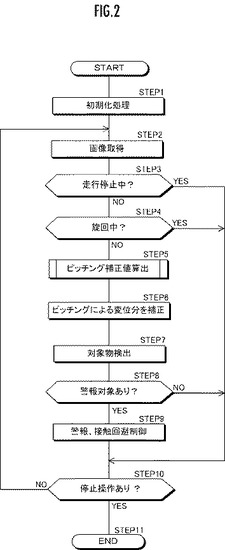
これにより、例えば、図3に示したように、今回の制御周期での撮像画像fがピッチングにより上側に変位しているときに、fをピッチング補正値PY分だけ下方向にシフトした補正画像f3が生成される。この場合、撮像画像fでは対象物の検索領域Eから外れていた歩行者の画像部分50の上側が、補正画像f3では検索領域E内に入るため、補正画像f3から歩行者の画像部分50を検出することができる。
【0021】
また、STEP3で車両が停止中であると判断されたとき、及び、STEP4で車両が旋回中であると判断されたときにはSTEP10に分岐する。この場合は、補正画像f3は生成されず、また、後述するSTEP7〜STEP9による警報及び接触回避制御も実行されない。
【0022】
STEP7は対象物検出部14による処理であり、対象物検出部14は、STEP6で補正画像f3が生成されたときは補正画像f3から、また、補正画像f3が生成されなかったときには撮像画像fから、監視対象物(歩行者等)を検出する。
【0023】
続くSTEP8〜STEP9は、警報制御部15及び車両制御部16による処理である。警報制御部15は、STEP8で対象物検出部14により検出された対象物が警報対象であるか否かを判断し(自車両からの距離や対象物の進行方向等により判断される)、警報対象であると判断したときにはSTEP9に進む。
【0024】
そして、警報制御部15は、ディスプレイ30に対象物の位置を示して警告表示をし、また、スピーカ31から対象物の存在を報知する音声を出力する。また、車両制御部16は、警報対象である対象物との接触を回避するために、必要に応じてアクチュエータ(ブレーキ機構、操舵機構等)を作動させる。
【0025】
一方、STEP8で、対象物検出部14により検出された対象物が警報対象ではないと判断されたとき、STEP10に分岐し、警報制御部15及び車両制御部16によるSTEP9の処理は行われない。
【0026】
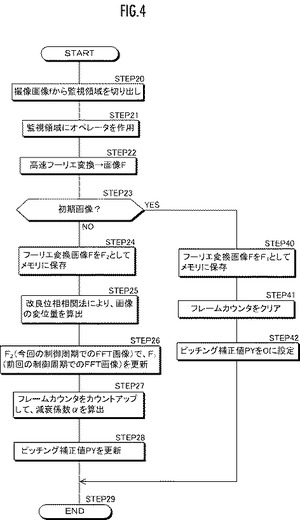
次に、図4に示したフローチャートに従って、ピッチング補正値算出部12によるピッチング補正値の設定処理について説明する。
【0027】
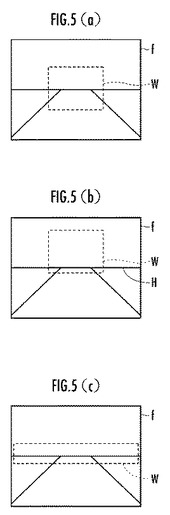
ピッチング補正値算出部12は、STEP20で、今回の制御サイクルでの撮像画像fから監視領域Wを切出す。ここで、監視領域Wは、図5(a)に示したように、撮像画像fの中央部に設定されている。
【0028】
なお、上下移動しない対象物の画像が監視領域内に含まれるようにするという観点から、図5(b)に示したように、監視領域Wを空側(地平線Hの上側、通常は建物や先行車両が撮像される)に設定してもよい。また、自車両の前後方向の移動に応じた画像上での移動量が小さいという観点から、図5(c)に示したように、監視領域Wを地平線H付近をより広範囲に監視する領域に設定してもよい。
【0029】
或いは、前回の制御周期での撮像画像から、自車両に近い先行車両の画像部分が検出されたときには、この先行車両は撮像画像上での上下変位が少ない対象物であるので、この画像部分を含むように監視領域を設定してもよい。
【0030】
続くSTEP21で、監視領域にハミング窓(Hamming window)等による2次元のオペーレータを作用させる。ここで、監視領域に2次元のオペレータを作用させるのは、監視領域の境界が後述する高速フーリエ変換の結果に影響を及ぼすことを防ぐためである。そして、STEP22で、ピッチング補正値算出部12は、今回の制御周期での撮像画像fの監視領域に対して、高速フーリエ変換を行ってフーリエ変換画像Fを生成する。
【0031】
次のSTEP23で、ピッチング補正値算出部12は、撮像画像fが初期画像(図2のフローチャートによる処理が開始されてから最初の撮像画像、及び、図2のSTEP3,4で車両が停止中又は旋回中であると判断されてから最初の撮像画像)であるか否かを判断する。そして、撮像画像fが初期画像であったときはSTEP40に分岐し、ピッチング補正値算出部12は、フーリエ変換画像FをF1(前回の制御周期でのフーリエ変換画像)としてメモリに保持する。続くSTEP41で、ピッチング補正値算出部12は、フレームカウンタのカウント値FRをクリア(0→FR)し、STEP42でピッチング補正値PYをゼロに設定してSTEP29に進み、処理を終了する。
【0032】
一方、STEP23で撮像画像fが初期画像でなかったときには、STEP24に進み、ピッチング補正値算出部12は、フーリエ変換画像FをF2(今回の制御周期でのフーリエ変換画像)としてメモリに保持する。そして、続くSTEP25で、ピッチング補正値算出部12は、以下の式(1)の位相相関関数Ra(ω)の逆フーリエ変換IRaを求めて、前回の制御周期での撮像画像に対する今回の撮像画像の変位量を求める。
【0033】
【数1】

【0034】
但し、F1:前回の制御周期でのフーリエ変換画像、F2:今回の制御周期でのフーリエ変換画像、ε1:今回の制御周期での撮像画像に含まれる前回の制御周期での撮像画像の残像分の影響を低減するための定数。
【0035】
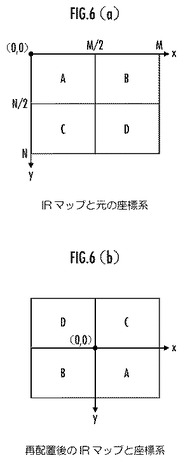
上記式(1)による位相相関関数Ra(ω)の逆フーリエ変換IRaは、監視領域として切出した画像と同じサイズの複素数要素の2次元マップとなる。この2次元マップの要素の位置を、図6(a),図6(b)に示したように入れ替えて、水平位置がM/2よりも大きいとき及び垂直位置がN/2よりも大きいときに負の座標値で示すようにする。
【0036】
このようにして座標を設定したIRaのマップにおいて、実部が最大となる要素の水平位置ix及び垂直位置iyを求めると、水平位置ix及び垂直位置iyが、それぞれピクセル単位の撮像画像の変位量の水平成分及び垂直成分となる。なお、IRaのマップの(ix,iy)近傍の要素の値を用いて、IRaが離散系ではなく連続系としたときに実部が最大となるサブピクセル単位の位置を推定し、この位置を撮像画像の変位量の水平及び垂直成分としてもよい。
【0037】
ここで、赤外線カメラ20に用いられている赤外線撮像素子は、入射される赤外線を熱に変換して吸収し、吸収した熱量に応じて電気抵抗が変化する赤外線吸収膜を用いて構成されている。そして、一旦赤外線吸収膜に吸収された熱が放熱されるまでには、赤外線吸収膜の熱容量C及び周囲回路の熱コンダクタンスGにより定まる熱時定数τに依存した時間を要する。
【0038】
そのため、赤外線吸収膜に入力される赤外線のレベルの変化に対する赤外線検出信号の応答遅れにより、今回の制御周期での撮像画像に前回の制御周期での撮像画像が残像として重なる現象が生じる場合がある。
【0039】
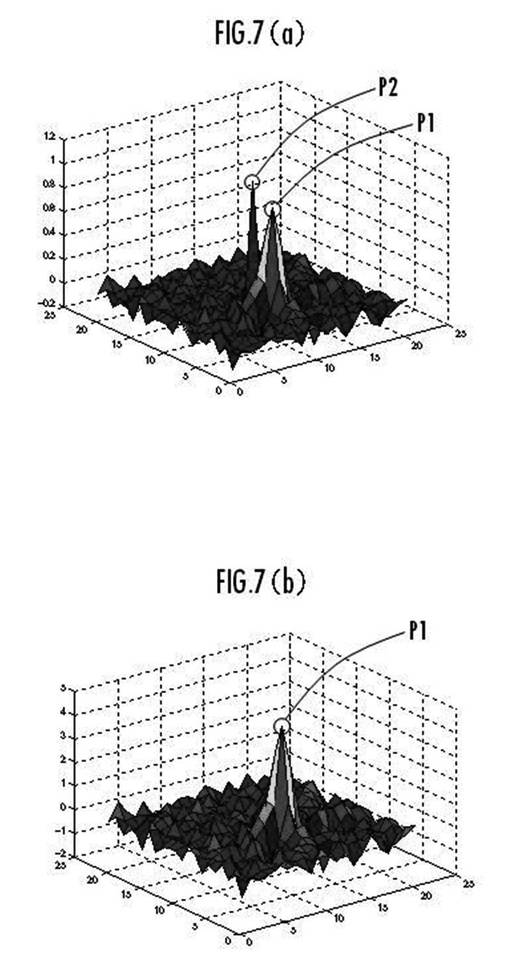
ここで、図7(a)は、一般的な位相相関関数である以下の式(2)のR(ω)を求めて、その逆高速フーリエ変換IRのマップを、底面を複素数要素の2次元(x−y)座標とし、高さを複素数要素の実部の大きさとして示した3次元表示であり、実部が最大となる複数数要素(ピーク点)が2個(P1,P2)存在している。
【0040】
【数2】
【0041】
この場合、2個のピーク点のうちの1個は車両の挙動による撮像画像の変位に応じたものであり、もう1個は前回の制御周期での撮像画像の残像に応じたものであるが、この2個のうちのいずれが車両の挙動による撮像画像の変位に応じたものであるかを、実部の大きさから区別することはできない。
【0042】
そこで、本実施形態では、上記式(2)のR(ω)に代えて、上記式(1)のRa(ω)を求めている。上記式(1)のε1は、赤外線カメラ20の赤外線撮像素子が有する熱容量の影響により生じる残存分の影響を低減するための定数であり、実験やコンピュータシミュレーションにより決定される。残像分の影響の程度は、赤外線カメラ20の特性に依るものであるため、一度適切なε1を設定すれば後は変更する必要がない。
【0043】
図7(b)は、図7(a)と同一のF1(前回の制御周期での高速フーリエ変換画像)及びF2(今回の制御周期での高速フーリエ変換画像)について、上記式(1)のRa(ω)の逆フーリエ変換IRaのマップを、上述した図7(a)と同様に示したものであり、図7(a)で見られたピーク点P2が消失している。そのため、残ったピーク点P1のマップ中心からのずれ量を、今回の制御周期での撮像画像の前回の制御周期での撮像画像からの変位量として求めることができる。
【0044】
次のSTEP26で、ピッチング補正値算出部12は、今回の制御周期のフーリエ変換画像F2で、前回の制御周期のフーリエ変換画像F1を更新する。また、STEP27で、フレームカウンタをカウントアップ(FR+1→FR)し、以下の式(3)により、ピッチング補正値PYに誤差が蓄積することを防ぐための減衰係数αを算出する。
【0045】
【数3】
【0046】
但し、α:減衰係数、D:αの最大値(FXが示す期間が経過した後のαの値)、FR:フレームカウンタのカウント値、FX:ピッチング補正値PYを抑制する期間(旋回直後等の車両姿勢が不安定になる期間)に相当するフレーム数。
【0047】
続くSTEP28で、ピッチング補正値算出部12は、以下の式(4)によりピッチング補正値PYを算出(更新)する。そして、STEP29に進み、ピッチング補正値算出部12は処理を終了する。
【0048】
【数4】
【0049】
PY:ピッチング補正値、SY:画像変位量、α:減衰係数。
【0050】
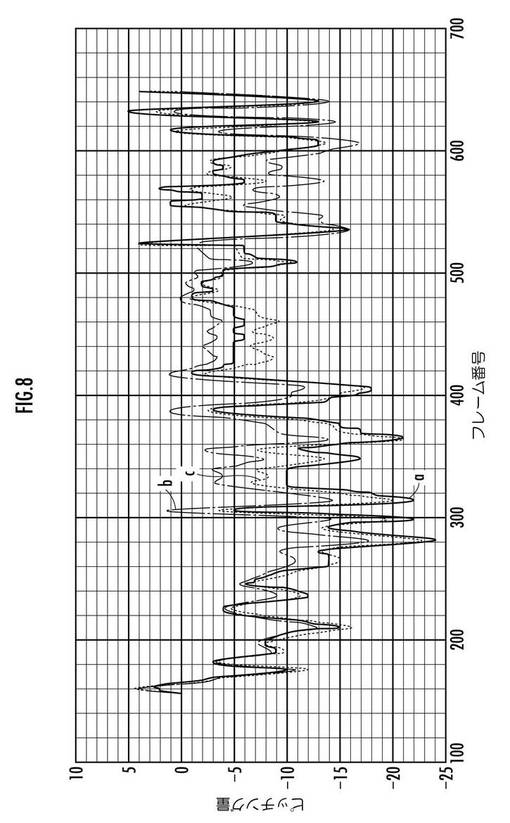
ここで、図8は、実際のピッチング量(図中a)と、上記式(2)の位相相関関数R(ω)を用いて算出したピッチング補正値(図中b)と、上記式(1)の位相相関関数Ra(ω)を用いて算出したピッチング補正値(図中c)を、縦軸をピッチング量(ピクセル数)に設定し、横軸を撮像画像のフレーム番号に設定して示した比較グラフである。図8から明らかなように、上記式(1)の定数項ε1を加えた位相相関関数Ra(ω)を用いることによって、ピッチング補正値と実際のピッチング量との差を減少させることができる。
【0051】
なお、上記式(1)の位相相関関数Fa(ω)に代えて、以下の式(5)の位相相関関数Fb(ω)を用いてもよい。
【0052】
【数5】
【0053】
但し、F1:前回の制御周期でのフーリエ変換画像、F2:今回の制御周期でのフーリエ変換画像、ε2:今回の制御周期での撮像画像に含まれる前回の制御周期での撮像画像の残像分の影響を低減するための定数。
【0054】
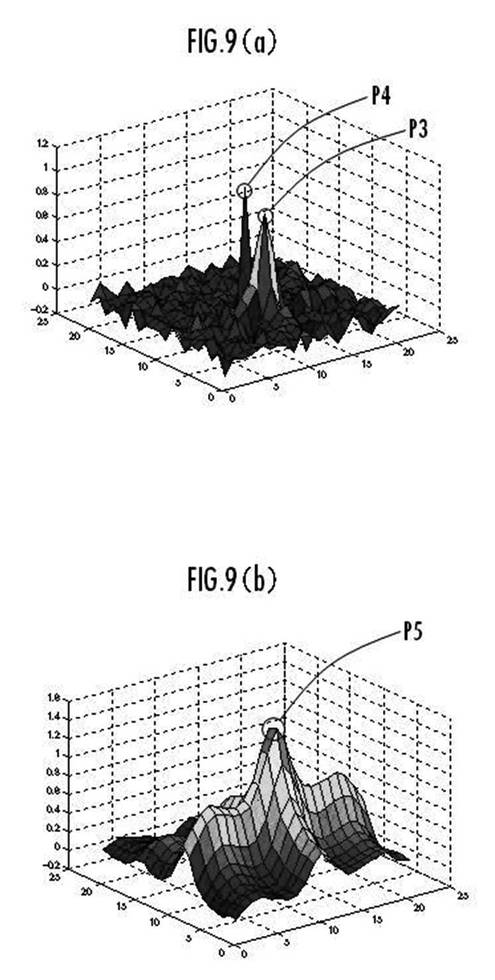
ここで、図9(a)は、上述した図7(a)と同様に、上記式(2)の位相相関関数R(ω)の逆高速フーリエ変換IRのマップを、底面を複素数要素の2次元(x−y)座標とし、高さを複素数要素の実部の大きさとして示した3次元表示であり、実部が最大となる複数数要素(ピーク点)が2個(P3,P4)存在している。
【0055】
それに対して、図9(b)は、図9(a)と同一のF1(前回の制御周期での高速フーリエ変換画像)とF2(今回の制御周期での高速フーリエ変換画像)について、上記式(4)の位相相関関数Rb(ω)を求めて、その逆高速フーリエ変換IRbのマップを図9(a)と同様にして示したものである。
【0056】
図9(b)では、P4の実部の大きさが減少して、ピーク点が1個(P5)になっている。そのため、ピッチング補正値算出部12は、P5の中心(0,0)からのずれ量を、今回の制御周期での撮像画像の前記の制御周期での撮像画像からの変位量として求めることができる。
【0057】
なお、本実施の形態では、赤外線カメラ20を用いた場合の残像の影響を抑制するために、上記式(1)又は上記式(5)の位相相関関数を用いることを説明したが、可視カメラを含むカメラ一般において、撮像素子の特定の位置(定位置)に常時生じる固定ノイズによる画像の影響を抑制するときにも、上記式(1)又は上記式(5)の位相相関関数を用いることが有効である。
【0058】
また、上記式(1)及び式(5)の位相相関関数を用いずに、上記式(2)の一般的な位相相関関数を用いて、撮像画像の変位量を求める場合にも、本発明の効果を得ることができる。この場合に、図7(a),図9(a)に示したように、ピーク点が複数存在するときには、逆高速フーリエ変換のマップの中心から最も離れたピーク点(図7(a)ではP1、図9(a)ではP2)の複素数要素の位置を、今回の制御周期での撮像画像の前回の制御周期での撮像画像からの変位量とすればよい。
【0059】
また、本実施の形態では、車両挙動に起因する撮像画像の変位を、x(左右)及びy(上下)という2方向について補正したが、上下方向についての位相相関を求めて、上下方向についてのみ補正をするようにしてもよい。
【符号の説明】
【0060】
10…ECU、11…画像取得部、12…変位量算出部、13…補正画像生成部、14…対象物検出部、20…赤外線カメラ。
【技術分野】
【0001】
本発明は、車両に設けられたカメラによる撮像画像から、車両周辺の監視対象物を検出する車両周辺監視装置に関する。
【背景技術】
【0002】
車両に設けられたカメラを用いて走行中に車両周辺を監視する場合、ピッチング(鉛直方向の車両の揺れ)等によりカメラの視軸が変位したときであっても、監視対象物を安定して検出できることが望ましい。
【0003】
そこで、ジャイロセンサ等のピッチ検出器を車両に備えて、このピッチ検出器により検出した鉛直方向の変位量により、ピッチングによる画像のずれ量を補正するようにした移動車の環境認識装置が提案されている(例えば、特許文献1参照)。
【0004】
また、車両に備えられたステレオカメラによる撮像画像の視差に基いて、自車両と対象物との距離を算出し、この距離のサンプル周期毎の変化から自車両と対象物の相対速度及び相対加減速度を算出して、所定量以上のピッチング変化が生じたことを判定するようにした車両用距離測定装置が提案されている(例えば、特許文献2参照)。この車両用距離測定装置においては、自車両と対象物との相対加速度に基づいてピッチングの程度に応じた画像位置の補正量を算出している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平3−118611号公報
【特許文献2】特開平11−51645号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述した特許文献1に記載された構成によりピッチング補正を行うためには、ピッチ検出器が必要になるため、装置のコストがアップすると共に、装置の構成が複雑になるという不都合がある。さらに、ピッチ検出器により検出された変位量を撮像画像に反映させて補正をするタイミングのずれにより、ピッチング補正が不適切なものとなるおそれがある。
【0007】
また、上記特許文献2に記載された構成は、ステレオカメラによる対象物との距離を測定するものであるため、単眼カメラによる構成には適用できないという不都合がある。
【0008】
そこで、本発明は、ピッチ検出器を用いることなく、単眼カメラによる構成においてもピッチング補正を行うことができる機能を備えた車両周辺監視装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
第1発明の車両周辺監視装置は、所定の制御周期毎に、車両に搭載されたカメラによる撮像画像を取得する画像取得部と、今回の制御周期での撮像画像の前回の制御周期からの変位量を算出し、該変位量を用いて車両の挙動に起因する撮像画像の変位分を相殺するためのピッチング補正値を算出するピッチング補正値算出部と、今回の撮像画像に対して、前記ピッチング補正値による補正を行った補正画像を生成する補正画像生成部と、前記補正画像から対象物を検出する対象物検出部とを備え、前記ピッチング補正値算出部は、撮像画像から、地平線より上側の所定領域、地平線を含み地平線より下側から上側までの所定領域、又は自車両から所定距離内の先行車両を含む所定領域を監視領域として切出し、今回の制御周期における撮像画像の監視領域と前回の制御周期における撮像画像の監視領域間で前記変位量を求めることを特徴とする。
【0010】
第1発明によれば、ピッチ検出器を用いることなく、単眼カメラによる構成においてもピッチング補正を行うことができる。
【0011】
第2発明の車両周辺監視装置は、第1発明において、前記ピッチング補正値算出部は、前回の制御周期での撮像画像の監視領域と今回の制御周期での撮像画像の監視領域とにおける上下移動しない対象物の画像部分の相対変位量の相関値に基づいて、前記変位量を算出することを特徴とする。
【図面の簡単な説明】
【0012】
【図1】車両周辺監視装置の構成図。
【図2】車両周辺監視処理のフローチャート。
【図3】ピッチング補正値による撮像画像の補正の説明図。
【図4】ピッチング補正値算出処理のフローチャート。
【図5】監視領域の設定態様の説明図。
【図6】位相相関関数の逆フーリエ変換マップに対する変位量の座標系の再配置の説明図。
【図7】改良した位相相関関数を用いることによる効果の説明図。
【図8】改良した位相相関関数を用いた場合の検証データ。
【図9】他の改良した位相相関関数を用いることによる効果の説明図。
【発明を実施するための形態】
【0013】
本発明の実施形態について、図1〜図9を参照して説明する。
【0014】
図1を参照して、本実施形態の車両周辺監視装置は車両に搭載して使用され、ECU(Electronic Control Unit)10と、ECU10に接続された赤外線カメラ20(本発明のカメラに相当する)、ヨーレートセンサ21、車速センサ22、ディスプレイ30、スピーカ31、及びアクチュエータ32とにより構成されている。
【0015】
ECU10は図示しないCPU、メモリ等により構成された電子ユニットであり、メモリに保持された車両周辺監視用プログラムをCPUに実行させることによって、ECU10は、所定の制御周期毎に赤外線カメラ20による撮像画像を取り込む画像取得部11、画像取得部11により取得された今回の制御周期での撮像画像fについて、車両挙動による変位量を相殺するためのピッチング補正値PYを算出するピッチング補正値算出部12、ピッチング補正値PYにより撮像画像fを補正した補正画像f3を生成する補正画像生成部13、補正画像f3から対象物(歩行者等)を検出する対象物検出部14、警報対象となる対象物が検出されたときにディスプレイ30とスピーカ31による警報を行う警報制御部15、及び対象物との接触を回避するためにアクチュエータ32(ブレーキ機構、操舵機構等)を作動させる車両制御部16として機能する。
【0016】
次に、図2に示したフローチャートに従って、ECU10による車両周辺監視処理の実行手順について説明する。ECU10は、運転者による車両周辺監視処理の開始操作がなされたときに、図2に示したフローチャートによる車両周辺開始処理を開始する。
【0017】
ECU10は、STEP1で初期化処理を行った後、STEP10で運転者による車両周辺監視処理の停止操作がなされるまで、STEP2〜STEP9の処理を所定の制御周期により繰り返し実行する。STEP2は画像取得部11による処理であり、画像取得部11は、赤外線カメラ20から出力される1フレーム分のアナログの映像信号をデジタル信号に変更して画像メモリ(図示しない)に保持する。
【0018】
続くSTEP3〜STEP6は、ピッチング補正値算出部12及び補正画像生成部13による処理である。ピッチング補正値算出部12は、STEP3で車速センサ22による検出速度から走行停止中でないと判断され、且つ、STEP4でヨーレートセンサ21により車両が旋回中でないと判断されたときに、STEP5で車両挙動(ピッチング等)に起因する撮像画像の変位分を補正するためのピッチング補正値PYを算出する。ピッチング補正値PYは、撮像画像の変位分を相殺するためのシフト量(ピクセル値)である。
【0019】
また、補正画像生成部13は、STEP3で車速センサ22による検出速度から走行中であると判断され、且つ、STEP4でヨーレートセンサ21により車両が旋回中でないと判断されて、STEP5でピッチング補正値算出部12によりピッチング補正値PYが算出されたときに、今回の撮像画像f1をピッチング補正値PY分シフトさせて補正画像f3を生成し、STEP7に進む。
【0020】
これにより、例えば、図3に示したように、今回の制御周期での撮像画像fがピッチングにより上側に変位しているときに、fをピッチング補正値PY分だけ下方向にシフトした補正画像f3が生成される。この場合、撮像画像fでは対象物の検索領域Eから外れていた歩行者の画像部分50の上側が、補正画像f3では検索領域E内に入るため、補正画像f3から歩行者の画像部分50を検出することができる。
【0021】
また、STEP3で車両が停止中であると判断されたとき、及び、STEP4で車両が旋回中であると判断されたときにはSTEP10に分岐する。この場合は、補正画像f3は生成されず、また、後述するSTEP7〜STEP9による警報及び接触回避制御も実行されない。
【0022】
STEP7は対象物検出部14による処理であり、対象物検出部14は、STEP6で補正画像f3が生成されたときは補正画像f3から、また、補正画像f3が生成されなかったときには撮像画像fから、監視対象物(歩行者等)を検出する。
【0023】
続くSTEP8〜STEP9は、警報制御部15及び車両制御部16による処理である。警報制御部15は、STEP8で対象物検出部14により検出された対象物が警報対象であるか否かを判断し(自車両からの距離や対象物の進行方向等により判断される)、警報対象であると判断したときにはSTEP9に進む。
【0024】
そして、警報制御部15は、ディスプレイ30に対象物の位置を示して警告表示をし、また、スピーカ31から対象物の存在を報知する音声を出力する。また、車両制御部16は、警報対象である対象物との接触を回避するために、必要に応じてアクチュエータ(ブレーキ機構、操舵機構等)を作動させる。
【0025】
一方、STEP8で、対象物検出部14により検出された対象物が警報対象ではないと判断されたとき、STEP10に分岐し、警報制御部15及び車両制御部16によるSTEP9の処理は行われない。
【0026】
次に、図4に示したフローチャートに従って、ピッチング補正値算出部12によるピッチング補正値の設定処理について説明する。
【0027】
ピッチング補正値算出部12は、STEP20で、今回の制御サイクルでの撮像画像fから監視領域Wを切出す。ここで、監視領域Wは、図5(a)に示したように、撮像画像fの中央部に設定されている。
【0028】
なお、上下移動しない対象物の画像が監視領域内に含まれるようにするという観点から、図5(b)に示したように、監視領域Wを空側(地平線Hの上側、通常は建物や先行車両が撮像される)に設定してもよい。また、自車両の前後方向の移動に応じた画像上での移動量が小さいという観点から、図5(c)に示したように、監視領域Wを地平線H付近をより広範囲に監視する領域に設定してもよい。
【0029】
或いは、前回の制御周期での撮像画像から、自車両に近い先行車両の画像部分が検出されたときには、この先行車両は撮像画像上での上下変位が少ない対象物であるので、この画像部分を含むように監視領域を設定してもよい。
【0030】
続くSTEP21で、監視領域にハミング窓(Hamming window)等による2次元のオペーレータを作用させる。ここで、監視領域に2次元のオペレータを作用させるのは、監視領域の境界が後述する高速フーリエ変換の結果に影響を及ぼすことを防ぐためである。そして、STEP22で、ピッチング補正値算出部12は、今回の制御周期での撮像画像fの監視領域に対して、高速フーリエ変換を行ってフーリエ変換画像Fを生成する。
【0031】
次のSTEP23で、ピッチング補正値算出部12は、撮像画像fが初期画像(図2のフローチャートによる処理が開始されてから最初の撮像画像、及び、図2のSTEP3,4で車両が停止中又は旋回中であると判断されてから最初の撮像画像)であるか否かを判断する。そして、撮像画像fが初期画像であったときはSTEP40に分岐し、ピッチング補正値算出部12は、フーリエ変換画像FをF1(前回の制御周期でのフーリエ変換画像)としてメモリに保持する。続くSTEP41で、ピッチング補正値算出部12は、フレームカウンタのカウント値FRをクリア(0→FR)し、STEP42でピッチング補正値PYをゼロに設定してSTEP29に進み、処理を終了する。
【0032】
一方、STEP23で撮像画像fが初期画像でなかったときには、STEP24に進み、ピッチング補正値算出部12は、フーリエ変換画像FをF2(今回の制御周期でのフーリエ変換画像)としてメモリに保持する。そして、続くSTEP25で、ピッチング補正値算出部12は、以下の式(1)の位相相関関数Ra(ω)の逆フーリエ変換IRaを求めて、前回の制御周期での撮像画像に対する今回の撮像画像の変位量を求める。
【0033】
【数1】
【0034】
但し、F1:前回の制御周期でのフーリエ変換画像、F2:今回の制御周期でのフーリエ変換画像、ε1:今回の制御周期での撮像画像に含まれる前回の制御周期での撮像画像の残像分の影響を低減するための定数。
【0035】
上記式(1)による位相相関関数Ra(ω)の逆フーリエ変換IRaは、監視領域として切出した画像と同じサイズの複素数要素の2次元マップとなる。この2次元マップの要素の位置を、図6(a),図6(b)に示したように入れ替えて、水平位置がM/2よりも大きいとき及び垂直位置がN/2よりも大きいときに負の座標値で示すようにする。
【0036】
このようにして座標を設定したIRaのマップにおいて、実部が最大となる要素の水平位置ix及び垂直位置iyを求めると、水平位置ix及び垂直位置iyが、それぞれピクセル単位の撮像画像の変位量の水平成分及び垂直成分となる。なお、IRaのマップの(ix,iy)近傍の要素の値を用いて、IRaが離散系ではなく連続系としたときに実部が最大となるサブピクセル単位の位置を推定し、この位置を撮像画像の変位量の水平及び垂直成分としてもよい。
【0037】
ここで、赤外線カメラ20に用いられている赤外線撮像素子は、入射される赤外線を熱に変換して吸収し、吸収した熱量に応じて電気抵抗が変化する赤外線吸収膜を用いて構成されている。そして、一旦赤外線吸収膜に吸収された熱が放熱されるまでには、赤外線吸収膜の熱容量C及び周囲回路の熱コンダクタンスGにより定まる熱時定数τに依存した時間を要する。
【0038】
そのため、赤外線吸収膜に入力される赤外線のレベルの変化に対する赤外線検出信号の応答遅れにより、今回の制御周期での撮像画像に前回の制御周期での撮像画像が残像として重なる現象が生じる場合がある。
【0039】
ここで、図7(a)は、一般的な位相相関関数である以下の式(2)のR(ω)を求めて、その逆高速フーリエ変換IRのマップを、底面を複素数要素の2次元(x−y)座標とし、高さを複素数要素の実部の大きさとして示した3次元表示であり、実部が最大となる複数数要素(ピーク点)が2個(P1,P2)存在している。
【0040】
【数2】
【0041】
この場合、2個のピーク点のうちの1個は車両の挙動による撮像画像の変位に応じたものであり、もう1個は前回の制御周期での撮像画像の残像に応じたものであるが、この2個のうちのいずれが車両の挙動による撮像画像の変位に応じたものであるかを、実部の大きさから区別することはできない。
【0042】
そこで、本実施形態では、上記式(2)のR(ω)に代えて、上記式(1)のRa(ω)を求めている。上記式(1)のε1は、赤外線カメラ20の赤外線撮像素子が有する熱容量の影響により生じる残存分の影響を低減するための定数であり、実験やコンピュータシミュレーションにより決定される。残像分の影響の程度は、赤外線カメラ20の特性に依るものであるため、一度適切なε1を設定すれば後は変更する必要がない。
【0043】
図7(b)は、図7(a)と同一のF1(前回の制御周期での高速フーリエ変換画像)及びF2(今回の制御周期での高速フーリエ変換画像)について、上記式(1)のRa(ω)の逆フーリエ変換IRaのマップを、上述した図7(a)と同様に示したものであり、図7(a)で見られたピーク点P2が消失している。そのため、残ったピーク点P1のマップ中心からのずれ量を、今回の制御周期での撮像画像の前回の制御周期での撮像画像からの変位量として求めることができる。
【0044】
次のSTEP26で、ピッチング補正値算出部12は、今回の制御周期のフーリエ変換画像F2で、前回の制御周期のフーリエ変換画像F1を更新する。また、STEP27で、フレームカウンタをカウントアップ(FR+1→FR)し、以下の式(3)により、ピッチング補正値PYに誤差が蓄積することを防ぐための減衰係数αを算出する。
【0045】
【数3】
【0046】
但し、α:減衰係数、D:αの最大値(FXが示す期間が経過した後のαの値)、FR:フレームカウンタのカウント値、FX:ピッチング補正値PYを抑制する期間(旋回直後等の車両姿勢が不安定になる期間)に相当するフレーム数。
【0047】
続くSTEP28で、ピッチング補正値算出部12は、以下の式(4)によりピッチング補正値PYを算出(更新)する。そして、STEP29に進み、ピッチング補正値算出部12は処理を終了する。
【0048】
【数4】
【0049】
PY:ピッチング補正値、SY:画像変位量、α:減衰係数。
【0050】
ここで、図8は、実際のピッチング量(図中a)と、上記式(2)の位相相関関数R(ω)を用いて算出したピッチング補正値(図中b)と、上記式(1)の位相相関関数Ra(ω)を用いて算出したピッチング補正値(図中c)を、縦軸をピッチング量(ピクセル数)に設定し、横軸を撮像画像のフレーム番号に設定して示した比較グラフである。図8から明らかなように、上記式(1)の定数項ε1を加えた位相相関関数Ra(ω)を用いることによって、ピッチング補正値と実際のピッチング量との差を減少させることができる。
【0051】
なお、上記式(1)の位相相関関数Fa(ω)に代えて、以下の式(5)の位相相関関数Fb(ω)を用いてもよい。
【0052】
【数5】
【0053】
但し、F1:前回の制御周期でのフーリエ変換画像、F2:今回の制御周期でのフーリエ変換画像、ε2:今回の制御周期での撮像画像に含まれる前回の制御周期での撮像画像の残像分の影響を低減するための定数。
【0054】
ここで、図9(a)は、上述した図7(a)と同様に、上記式(2)の位相相関関数R(ω)の逆高速フーリエ変換IRのマップを、底面を複素数要素の2次元(x−y)座標とし、高さを複素数要素の実部の大きさとして示した3次元表示であり、実部が最大となる複数数要素(ピーク点)が2個(P3,P4)存在している。
【0055】
それに対して、図9(b)は、図9(a)と同一のF1(前回の制御周期での高速フーリエ変換画像)とF2(今回の制御周期での高速フーリエ変換画像)について、上記式(4)の位相相関関数Rb(ω)を求めて、その逆高速フーリエ変換IRbのマップを図9(a)と同様にして示したものである。
【0056】
図9(b)では、P4の実部の大きさが減少して、ピーク点が1個(P5)になっている。そのため、ピッチング補正値算出部12は、P5の中心(0,0)からのずれ量を、今回の制御周期での撮像画像の前記の制御周期での撮像画像からの変位量として求めることができる。
【0057】
なお、本実施の形態では、赤外線カメラ20を用いた場合の残像の影響を抑制するために、上記式(1)又は上記式(5)の位相相関関数を用いることを説明したが、可視カメラを含むカメラ一般において、撮像素子の特定の位置(定位置)に常時生じる固定ノイズによる画像の影響を抑制するときにも、上記式(1)又は上記式(5)の位相相関関数を用いることが有効である。
【0058】
また、上記式(1)及び式(5)の位相相関関数を用いずに、上記式(2)の一般的な位相相関関数を用いて、撮像画像の変位量を求める場合にも、本発明の効果を得ることができる。この場合に、図7(a),図9(a)に示したように、ピーク点が複数存在するときには、逆高速フーリエ変換のマップの中心から最も離れたピーク点(図7(a)ではP1、図9(a)ではP2)の複素数要素の位置を、今回の制御周期での撮像画像の前回の制御周期での撮像画像からの変位量とすればよい。
【0059】
また、本実施の形態では、車両挙動に起因する撮像画像の変位を、x(左右)及びy(上下)という2方向について補正したが、上下方向についての位相相関を求めて、上下方向についてのみ補正をするようにしてもよい。
【符号の説明】
【0060】
10…ECU、11…画像取得部、12…変位量算出部、13…補正画像生成部、14…対象物検出部、20…赤外線カメラ。
【特許請求の範囲】
【請求項1】
所定の制御周期毎に、車両に搭載されたカメラによる撮像画像を取得する画像取得部と、
今回の制御周期での撮像画像の前回の制御周期からの変位量を算出し、該変位量を用いて車両の挙動に起因する撮像画像の変位分を相殺するためのピッチング補正値を算出するピッチング補正値算出部と、
今回の撮像画像に対して、前記ピッチング補正値による補正を行った補正画像を生成する補正画像生成部と、
前記補正画像から対象物を検出する対象物検出部と
を備え、
前記ピッチング補正値算出部は、撮像画像から、地平線より上側の所定領域、地平線を含み地平線より下側から上側までの所定領域、又は自車両から所定距離内の先行車両を含む所定領域を監視領域として切出し、今回の制御周期における撮像画像の監視領域と前回の制御周期における撮像画像の監視領域間で前記変位量を求めることを特徴とする車両周辺監視装置。
【請求項2】
請求項1記載の車両周辺監視装置において、
前記ピッチング補正値算出部は、前回の制御周期での撮像画像の監視領域と今回の制御周期での撮像画像の監視領域とにおける上下移動しない対象物の画像部分の相対変位量の相関値に基づいて、前記変位量を算出することを特徴とする車両周辺監視装置。
【請求項1】
所定の制御周期毎に、車両に搭載されたカメラによる撮像画像を取得する画像取得部と、
今回の制御周期での撮像画像の前回の制御周期からの変位量を算出し、該変位量を用いて車両の挙動に起因する撮像画像の変位分を相殺するためのピッチング補正値を算出するピッチング補正値算出部と、
今回の撮像画像に対して、前記ピッチング補正値による補正を行った補正画像を生成する補正画像生成部と、
前記補正画像から対象物を検出する対象物検出部と
を備え、
前記ピッチング補正値算出部は、撮像画像から、地平線より上側の所定領域、地平線を含み地平線より下側から上側までの所定領域、又は自車両から所定距離内の先行車両を含む所定領域を監視領域として切出し、今回の制御周期における撮像画像の監視領域と前回の制御周期における撮像画像の監視領域間で前記変位量を求めることを特徴とする車両周辺監視装置。
【請求項2】
請求項1記載の車両周辺監視装置において、
前記ピッチング補正値算出部は、前回の制御周期での撮像画像の監視領域と今回の制御周期での撮像画像の監視領域とにおける上下移動しない対象物の画像部分の相対変位量の相関値に基づいて、前記変位量を算出することを特徴とする車両周辺監視装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−51736(P2013−51736A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2012−249246(P2012−249246)
【出願日】平成24年11月13日(2012.11.13)
【分割の表示】特願2010−45775(P2010−45775)の分割
【原出願日】平成22年3月2日(2010.3.2)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成24年11月13日(2012.11.13)
【分割の表示】特願2010−45775(P2010−45775)の分割
【原出願日】平成22年3月2日(2010.3.2)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]