
車両周辺監視装置
【課題】単一の撮像装置で撮像した場合であっても、カーブミラーを歩行者と誤検知する可能性を軽減することができる車両周辺監視装置を提供する。
【解決手段】カーブミラー判定部104は、撮像画像から略円形の物体又は略四角形の物体をカーブミラー可能性物体、すなわち人体の頭部候補及びミラー本体候補として抽出するカーブミラー可能性物体抽出部104aと、抽出された前記カーブミラー可能性物体の近傍に支柱形状の物体の有無を検知する支柱形状物体検知部104bと、を有し、抽出された前記カーブミラー可能性物体の近傍に前記支柱形状の物体が検知された場合、前記カーブミラー可能性物体を前記カーブミラーであると決定する。
【解決手段】カーブミラー判定部104は、撮像画像から略円形の物体又は略四角形の物体をカーブミラー可能性物体、すなわち人体の頭部候補及びミラー本体候補として抽出するカーブミラー可能性物体抽出部104aと、抽出された前記カーブミラー可能性物体の近傍に支柱形状の物体の有無を検知する支柱形状物体検知部104bと、を有し、抽出された前記カーブミラー可能性物体の近傍に前記支柱形状の物体が検知された場合、前記カーブミラー可能性物体を前記カーブミラーであると決定する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、車両に搭載された赤外線カメラ等により撮像した画像を用いて、前記車両の周辺を監視する車両周辺監視装置に関し、特に夜間や暗所等での走行時に適用して好適な車両周辺監視装置に関する。
【背景技術】
【0002】
従来から、特許文献1に示すように、赤外線カメラにより捉えられた自車両周辺の画像(グレースケール画像とその2値化画像)から、自車両との接触の可能性がある歩行者等の対象物を検知し、検知した対象物を自車両の運転者に提供する車両周辺監視装置が知られている。
【0003】
特許文献1に係る車両周辺監視装置では、左右一組の赤外線カメラ(ステレオカメラ)が撮像した自車両周辺の画像において温度が高い部分を前記対象物として検知すると共に、左右画像中の対象物の視差を求めることにより当該対象物までの距離を算出し、当該対象物の移動方向や当該対象物の位置から、自車両の走行に影響を与えそうな(接触の可能性のある)歩行者等の対象物を検出して警報を出力する(特許文献1の[0014]、[0018])。
【0004】
しかしながら、左右一組の赤外線カメラを用いる車両周辺監視装置は、比較的高価であり、高級車の一部に採用されているのが実状である。
【0005】
コストを低減するために、特許文献2に係る車両周辺監視装置では、車両に搭載された単一の赤外線カメラを用いて、所定時間間隔で車両周辺の対象物を少なくとも2回(2フレーム)撮像する。前回の画像の大きさ(サイズ)に比較して今回の撮像画像における対象物の画像の大きさ(サイズ)の変化は、対象物と車両周辺監視装置搭載車両との相対速度が高いほど大きくなる。そして、車両の前方に存在する対象物は、当該対象物と車両との相対速度が高いほど、車両への到達時間が短くなる。このように、単一の赤外線カメラであっても所定時間間隔での同一の対象物の画像部分の大きさの変化率から、車両への到達時間、いわゆるTTC(Time To Contact or Time To Collision:接触余裕時間)を推定することで車両の周辺を監視することができる(特許文献2の[0006]、[0007]、[0061]、[0066])。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−284057号公報
【特許文献2】特許第4267657号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、電柱等に取り付けられている、道路の曲線などで見通しを助けるためのカーブミラーは、車両の運転者から正対して見た場合、略円形状に見え、歩行者の頭部形状に類似した形状を呈する。
【0008】
この場合、上述のステレオカメラであれば、両カメラの視差に基づき前記カーブミラーの大きさを瞬時に(画像の撮影毎に)算出できることから、前記カーブミラーの大きさが前記歩行者の頭部よりも大きいという事実を考慮して、カーブミラーを歩行者と誤検知(誤認識)することを瞬時に回避することができる。
【0009】
しかしながら、単一のカメラである場合には、前記したように、距離算出に所定時間を必要とするためステレオカメラ程の距離精度を確保することが難しい。従って、単一のカメラを用いる車両周辺監視装置では、前記カーブミラーを前記歩行者と誤検知する可能性がステレオカメラより高く、改善の余地がある。
【0010】
この発明は、このような課題を考慮してなされたものであって、単一の撮像装置で撮像した場合であっても、カーブミラーを歩行者と誤検知する可能性を軽減することができる車両周辺監視装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
この発明に係る車両周辺監視装置は、車両に搭載された撮像装置により撮像した画像を用いて前記車両の周辺を監視する車両周辺監視装置において、監視対象物と誤検知する可能性を有するカーブミラーであるか否かを判定するカーブミラー判定部を備え、前記カーブミラー判定部は、前記画像から略円形の物体又は略四角形の物体をカーブミラー可能性物体として抽出するカーブミラー可能性物体抽出部と、抽出された前記カーブミラー可能性物体の近傍に支柱形状の物体の有無を検知する支柱形状物体検知部と、を有し、抽出された前記カーブミラー可能性物体の近傍に前記支柱形状の物体が検知された場合、前記カーブミラー可能性物体を前記カーブミラーであると決定することを特徴とする。
【0012】
この発明によれば、車両に搭載された撮像装置により撮像した画像から検知された略円形又は略四角形のカーブミラー可能性物体の近傍に支柱形状の物体が検知された場合には、前記カーブミラー可能性物体が前記支柱形状の物体に取り付けられたカーブミラーであると決定するので、たとえ、単一の撮像装置で撮像した場合であっても、カーブミラー可能性物体を監視対象物としての歩行者(の頭部)等と誤検知する可能性を軽減することができる。
【0013】
この場合、前記カーブミラー判定部は、さらに、幅比較判定部を備え、抽出された前記カーブミラー可能性物体の幅が、検知された前記支柱形状の物体の幅よりも大きい場合、前記カーブミラー可能性物体を前記カーブミラーであると決定するようにしてもよい。歩行者の頭部幅は、当該歩行者の胴体部幅と同等以下の幅であるという事実から、抽出された前記カーブミラー可能性物体の幅が、検知された前記支柱形状の物体の幅よりも大きい場合、前記カーブミラー可能性物体を前記カーブミラーであるとより確実に決定することができる。
【0014】
また、前記カーブミラー判定部は、さらに、縦横比変化判定部を備え、前記車両の移動に伴う、前記撮像装置と、抽出された前記カーブミラー可能性物体との相対角度の変化に伴って、抽出された前記カーブミラー可能性物体の縦横比が変化した場合に、前記カーブミラー可能性物体を前記カーブミラーであると決定するようにしてもよい。前記カーブミラーは偏平形を有し、歩行者の頭部は、概ね円柱形であるという事実から、前記車両の移動に伴う、前記撮像装置と、抽出された前記カーブミラー可能性物体との相対角度の変化に伴って、抽出された前記カーブミラー可能性物体の縦横比が変化した場合に、前記カーブミラー可能性物体を前記カーブミラーであるとより確実に決定することができる。
【0015】
前記カーブミラー判定部は、さらに相対位置変化判定部を備え、前記車両の移動に伴う、前記撮像装置と、抽出された前記カーブミラー可能性物体との相対角度の変化に伴って、抽出された前記カーブミラー可能性物体と検知された前記支柱形状の物体との間の距離が変化した場合に、前記カーブミラー可能性物体を前記カーブミラーであると決定するようにしてもよい。歩行者の頭部と胴体部との間の距離は、前記車両の移動に伴う、前記撮像装置と、抽出された前記歩行者との相対角度の変化があっても、変化量が少ないという知見を考慮し、前記車両の移動に伴う、前記撮像装置と、抽出された前記カーブミラー可能性物体との相対角度の変化に伴って、抽出された前記カーブミラー可能性物体と検知された前記支柱形状の物体との間の距離が変化した場合に、前記カーブミラー可能性物体を前記カーブミラーであるより確実に決定することができる。
【発明の効果】
【0016】
この発明によれば、車両に搭載された撮像装置により撮像した画像から検知された略円形又は略四角形のカーブミラー可能性物体の近傍に支柱形状の物体が検知された場合には、前記カーブミラー可能性物体が前記支柱形状の物体に取り付けられたカーブミラーと決定するので、たとえ、単一の撮像装置で撮像した場合であっても、カーブミラー可能性物体を監視対象物と誤検知する可能性を軽減することができる。
【図面の簡単な説明】
【0017】
【図1】この発明の一実施形態に係る車両周辺監視装置の構成を示すブロック図である。
【図2】図1に示す車両周辺監視装置が搭載された車両の模式図である。
【図3】車両周辺監視装置の画像処理ユニットによる動作を説明するフローチャートである。
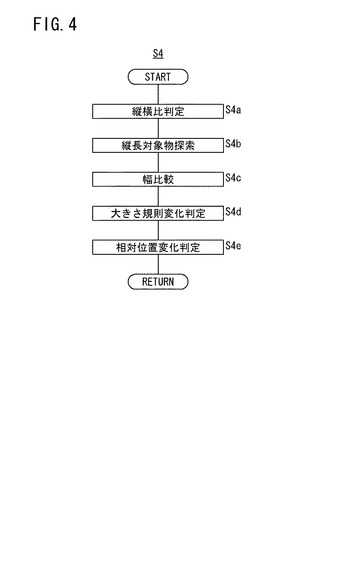
【図4】カーブミラー判定処理を説明する詳細なフローチャートである。
【図5】縦長対象物探索処理に参照される説明図である。
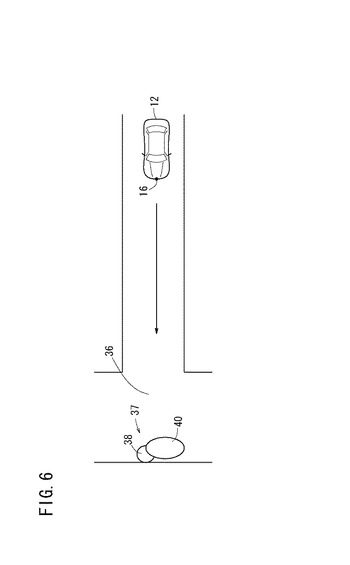
【図6】幅比較処理に参照される説明図である。
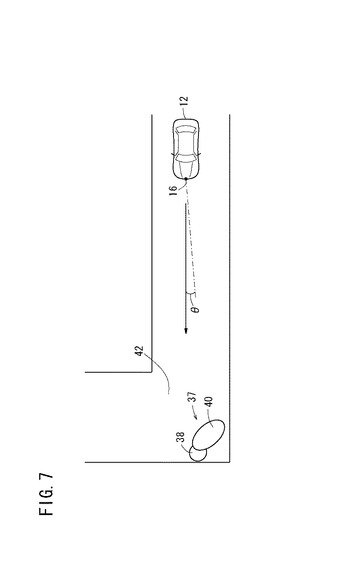
【図7】大きさ規則変化判定処理及び相対位置変化判定処理に参照される説明図である。
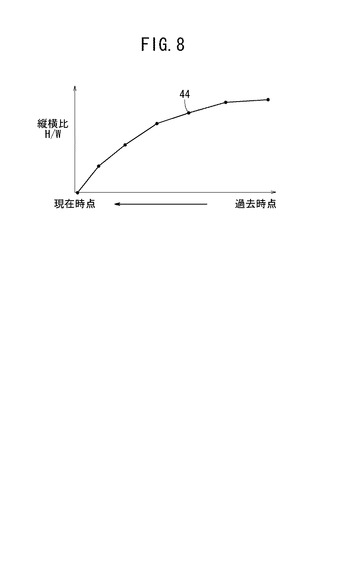
【図8】大きさ規則変化判定処理の説明に供される特性図である。
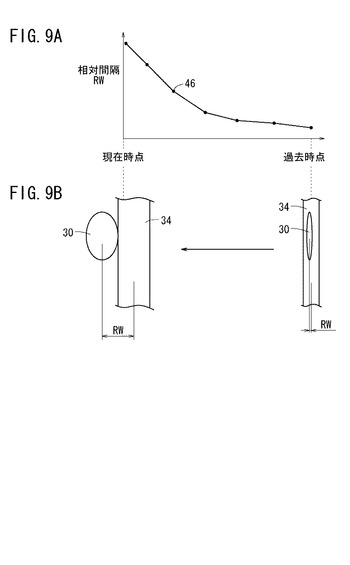
【図9】図9Aは、相対間隔の変化特性図、図9Bは、相対間隔の説明図である。
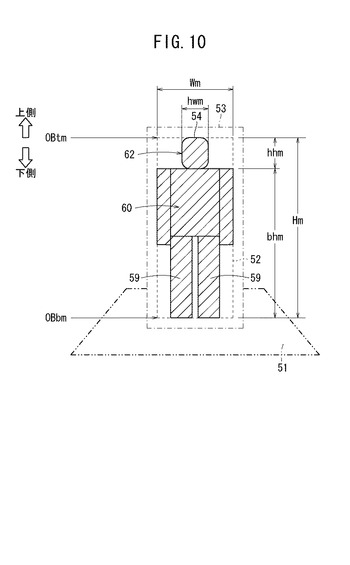
【図10】歩行者検知処理に供される歩行者の画像の模式図である。
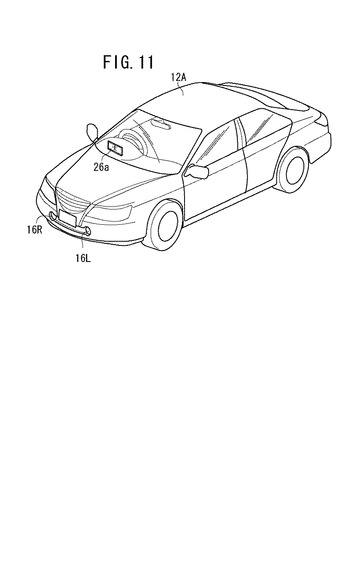
【図11】変形例に係る車両周辺監視装置が搭載された車両の模式図である。
【発明を実施するための形態】
【0018】
以下、この発明の実施形態について図面を参照して説明する。
【0019】
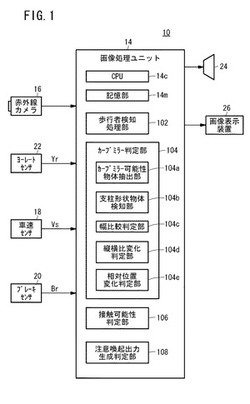
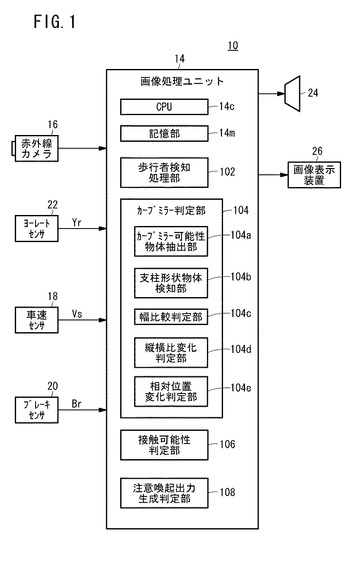
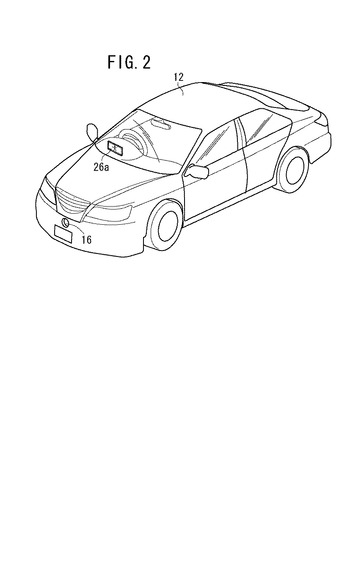
図1は、この発明の一実施形態に係る車両周辺監視装置10の構成を示すブロック図である。図2は、図1に示す車両周辺監視装置10が搭載された車両(自車両ともいう。)12の模式図である。
【0020】
図1及び図2において、車両周辺監視装置10は、該車両周辺監視装置10を制御する画像処理ユニット14と、この画像処理ユニット14に接続される単一(単眼)の赤外線カメラ16(撮像装置)と、車両12の車速Vsを検出する車速センサ18と、運転者によるブレーキペダルの操作量(ブレーキ操作量)Brを検出するブレーキセンサ20と、車両12のヨーレートYrを検出するヨーレートセンサ22と、音声で警報等を発するためのスピーカ24と、赤外線カメラ16により撮影された画像を表示し、接触の危険性が高い歩行者等の対象物(移動対象物、監視対象物)を車両12の運転者に認識させるためのHUD(Head Up Display)26a等を含む画像表示装置26と、を備える。
【0021】
画像表示装置26としては、HUD(ヘッドアップディスプレイ)26aに限らず、車両12に搭載されたナビゲーションシステムの地図等を表示するディスプレイや、メータユニット内等に設けられた燃費等を表示するディスプレイ(マルチインフォメーションディスプレイ)を利用することができる。
【0022】
画像処理ユニット14は、車両12の周辺の赤外線画像と車両の走行状態を示す信号(ここでは、車速Vs、ブレーキ操作量Br及びヨーレートYr)とから、車両前方の歩行者等の監視対象物を検出し、当該監視対象物との接触の可能性が高いと判断したときにスピーカ24から警報(例えば、ピッ、ピッ、…となる音)を発するとともに、HUD26a上にグレースケール表示される撮像画像の中の監視対象物を、黄色や赤色等の目立つ色枠で囲って強調表示する。このようにして、運転者の注意を喚起する。
【0023】
ここで、画像処理ユニット14は、入力アナログ信号をデジタル信号に変換するA/D変換回路等の入力回路と、デジタル化した画像信号を記憶する画像メモリ(記憶部14m)と、各種演算処理を行うCPU(中央処理装置)14cと、CPU14cが演算途中のデータを記憶するために使用するRAM(Random Access Memory)やCPU14cが実行するプログラムやテーブル、マップ及びテンプレート{歩行者(人体)形状テンプレート:右向き、左向き、正面(背面)向き、カーブミラー形状テンプレート等}を記憶するROM(Read Only Memory)等の記憶部14mと、クロック(時計部)及びタイマ(計時部)と、スピーカ24の駆動信号と画像表示装置26の表示信号などを出力する出力回路等を備えており、赤外線カメラ16、ヨーレートセンサ22、車速センサ18、及びブレーキセンサ20の各出力信号は、デジタル信号に変換されてCPU14cに入力されるように構成されている。
【0024】
画像処理ユニット14のCPU14cは、これらデジタル信号を取り込み、テーブル、マップ、及びテンプレート等を参照しながらプログラムを実行することで、各種機能手段(機能部ともいう。)として機能し、スピーカ24及び画像表示装置26に駆動信号(音声信号や表示信号)を送出する。これらの機能は、ハードウエアにより実現することもできる。
【0025】
この実施形態において、画像処理ユニット14は、それぞれ詳細を後述する歩行者検知処理部102、カーブミラー判定部104、接触可能性判定部106、及び注意喚起出力生成判定部108等の前記機能部を有する。ここで、カーブミラー判定部104は、カーブミラー可能性物体抽出部104a、支柱形状物体検知部104b、幅比較判定部104c、縦横比変化判定部104d、相対位置変化判定部104e等を備える。
【0026】
なお、画像処理ユニット14は、基本的には、赤外線カメラ16により取得した画像と、記憶部14mに記憶されている人体形状、動物形状、車両形状、及び電柱を含む支柱等の人工構造物形状等の模式的なテンプレートと比較して物体を認識する物体認識処理(物体検知処理)プログラムを実行する。
【0027】
図2に示すように、赤外線カメラ16は、車両12の前部バンパー部に、車両12の車幅方向中心部に、光軸が車軸と平行に配置されており、撮像対象(物体)の温度が高いほど、その出力信号(撮像信号)レベルが高くなる(輝度が増加する)特性を有している。
【0028】
また、HUD26aは、車両12のフロントウインドシールド上、運転者の前方視界を妨げない位置に表示画面が表示されるように設けられている。
【0029】
ここで、画像処理ユニット14は、赤外線カメラ16から出力されるアナログの映像信号を、数十ms、例えば、1秒/30フレーム[ms]のフレームクロック間隔・周期毎にデジタルデータに変換して記憶部14m(画像メモリ)に取り込み、記憶部14mに取り込んだ車両前方の画像に対して各種演算処理を行う上述した機能を有する。
【0030】
歩行者検知処理部102は、記憶部14mに取り込んだ車両前方の前記画像から歩行者等の監視対象物の画像部分を抽出する。注意喚起出力生成判定部108は、前記フレームクロック間隔・周期(所定時間間隔)をもって撮像された画像間における同一の監視対象物の画像部分の大きさの変化率Rateを算出し、さらに前記変化率Rateを用いて監視対象物が車両12に到達するまでの時間Tを推定するとともに、監視対象物の実空間における位置を算出し、監視対象物の実空間における移動ベクトルを算出する。
【0031】
監視対象物が車両12に到達するまでの時間(接触余裕時間ともいう。)TTC、換言すれば、車両12が監視対象物に接触するまでの時間TTCは、前記変化率Rate(画像から求める。)と、所定時間間隔である撮像間隔(フレームクロック周期)dT(既知)とから、公知の要領にて、例えば、特許文献2に示されるように、次の(1)式により求めることができる。
TTC=dT×Rate/(1−Rate) …(1)
【0032】
なお、変化率Rateは、監視対象物の前回の撮像時の画像中の監視対象物の幅又は長さW0(それぞれ画素数で記憶しておけばよい。)と、今回の撮像時の画像中の同一監視対象物の幅又は長さW1(画素数)との比(Rate=W0/W1)で求めることができる。
【0033】
また、監視対象物までの距離Zは、特許文献2に示されるように、次の(2)式により求めることができる。なお、(2)式において、Vsは、より正確には、監視対象物と車両12間の相対速度とされる。監視対象物が停止している場合には、相対速度は、車速Vsに等しい。
Z=Rate×Vs×dT/(1−Rate) …(2)
【0034】
さらに、注意喚起出力生成判定部108は、算出した前記接触余裕時間TTCと、所定時間間隔をもって撮像された前記画像間における同一の監視対象物の画像部分の位置変化量Δx(水平方向),Δy(垂直方向)を算出し、算出した位置変化量(移動ベクトル)Δx,Δyと、に基づいて監視対象物と車両12との接触可能性を判定する。
【0035】
カーブミラー判定部104は、記憶部14mに取り込んだ車両前方の前記画像から抽出された監視対象物の画像部分において、後述するように、歩行者(の頭部)であるかカーブミラーであるかを判別することで、カーブミラーである場合には、監視対象物から除外する処理を行う。
【0036】
基本的には以上にように構成され、かつ動作するこの実施形態に係る車両周辺監視装置10の詳細な動作について、図3のフローチャートを参照しながら説明する。
【0037】
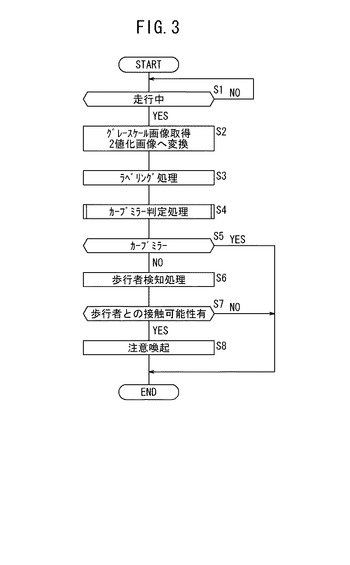
まず、ステップS1において、画像処理ユニット14は、車速センサ18により検出される車速Vs等から車両12の走行状態(走行中か停車中)を判定し、停車中(ステップS1:NO)である場合には、処理を停止する。
【0038】
走行中(ステップS1:YES)である場合、ステップS2において、画像処理ユニット14は、赤外線カメラ16によりフレーム毎に撮像された車両前方の所定画角範囲のフレーム毎の出力信号である赤外線画像を取得し、A/D変換し、グレースケール画像を画像メモリ(記憶部14m)に格納するとともに、格納したグレースケール画像の2値化処理、すなわち、輝度閾値より明るい領域を「1」(白)とし、暗い領域を「0」(黒)とする2値化画像への変換処理を行い、変換した2値化画像も前記フレームに対応させてフレーム毎に記憶部14mに格納する。この2値化処理では、閾値の選び方によるが、人体では頭部、肩、胴体、及び2本の脚等からなる塊(人体対象物候補)が、「1」の塊(集合体)として検出される。また、電柱等の支柱に取り付けられているカーブミラーでは、ミラー本体と支柱とが、「1」の塊(集合体)として検出される。
【0039】
この場合、ステップS3にて、画像処理ユニット14は、フレーム(画像)毎の2値化画像の「1」(白)をx方向(水平方向)の走査ライン毎にランレングスデータに変換し、y方向(垂直方向)に重なる部分のあるラインを1つの対象物とみなし、当該対象物にそれぞれラベルを付け、対象物候補とするラベリング処理を行う。この場合、頭部候補を備える人体候補(歩行者候補、監視対象物)と、ミラー本体候補を備えるカーブミラー候補(監視不要物)にラベルが付けられる。
【0040】
次いで、ステップS4にて、カーブミラー判定部104は、ラベルが付けられた対象物候補(頭部候補を備える人体候補とミラー本体候補を備えるカーブミラー候補)からカーブミラー候補を対象物(接触可能性のある対象物)から外すためのカーブミラー判定処理を行う。
【0041】
図4は、ステップS4のカーブミラー判定処理の詳細フローチャートを示している。
【0042】
まず、ステップS4aの縦横比判定処理が、カーブミラー可能性物体抽出部104aで実施される。
【0043】
カーブミラー可能性物体抽出部104aは、それぞれラベルが付けられた頭部候補を備える人体候補とミラー本体候補を備えるカーブミラー候補中、円形状、楕円形状あるいは四角形状を呈する前記頭部候補及び前記ミラー本体候補のどちらもカーブミラー可能性物体として抽出し、抽出したカーブミラー可能性物体を構成する前記頭部候補及び前記ミラー本体候補のそれぞれにつき、縦の長さ(H)と横の長さ(W)の比H/Wが、人体の頭部と推定する下記の(3)式の条件{横の長さWに対する縦の長さHの比が、1/2以上〜2の間の値}に当てはまるか否かを判定する。
1/2≦H/W≦2 …(3)
【0044】
(3)式の条件に当てはまらない対象物候補は、前記頭部候補ではなく前記ミラー本体候補を備えるカーブミラー候補であるとして、以降の処理対象から除外する。
【0045】
次いで、ステップS4bの縦長対象物探索処理が、支柱形状物体検知部104bで実施される。
【0046】
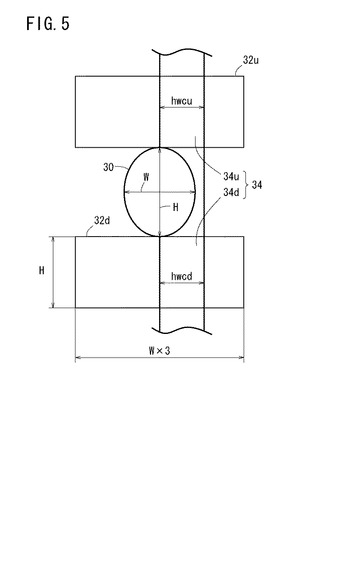
この場合、支柱形状物体検知部104bは、ステップS4aの処理で残された(除外されなかった)対象物候補(頭部候補を備える人体候補とミラー本体候補を備えるカーブミラー候補)のグレースケール画像等を参照し、例えば、図5に示すように、大きさが縦(高さ)H、横(幅)Wの対象物候補(この対象物候補は、上記した頭部候補あるいはミラー本体候補)30の上下に、大きさが、例えば、縦が対象物候補30の縦Hと同じ長さH、横が対象物候補30の幅Wの3倍の長さ(幅)W×3の面積を有する上部マスク領域32uと下部マスク領域32dを設定する。
【0047】
一般に、電柱に設置されているカーブミラーの場合には、対象物候補30に接する上部マスク領域32u内と下部マスク領域32d内に縦長対象物である支柱形状の物体が存在し、かつ上部マスク領域32u内で抽出される支柱形状の物体の特徴と下部マスク領域32d内で抽出される支柱形状の物体の特徴が類似するはずである。
【0048】
ここで、特徴は、例えば、垂直エッジや輝度プロファイルであり、支柱形状物体検知部104bによる類似判定は、例えば、上部マスク領域32u内と下部マスク領域32d内で算出された垂直エッジ幅hwcu、hwcdの差分が閾値Δth以内であるか否か(|hwcu−hwcd|≦Δth)、又は輝度プロファイル幅の差分が閾値以内であるか否かにより行う。
【0049】
ステップS4bにて、対象物候補30の上下に縦長対象物34u、34d(縦長対象物34又は支柱形状の物体34ともいう。)が検知された場合、カーブミラー判定部104は、図5に示す対象物候補30、すなわちミラー本体候補は、電柱に設置されているカーブミラー候補であると決定して、以降の処理対象から除外する。
【0050】
次に、ステップS4cの幅比較処理が、幅比較判定部104cで実施される。この場合、幅比較判定部104cは、ステップS4bにて下部マスク領域32dで抽出された垂直エッジ幅hwcd(縦長対象物34dの幅W1という。)と、対象物候補30の高さH(又は幅W)とを比較し対象物候補30の高さH(又は幅W)が、縦長対象物34dの幅W1より大きい場合(H>W1=hwcd)には、対象物候補30は、人体候補ではなく、カーブミラー候補であるとみなして以降の処理対象から除外する。一般に、ミラー本体の高さH(又は幅W)は、ミラー本体を取り付ける支柱(ポール)や電柱の幅(太さ)よりも大きく、人体では、胴体部の幅が頭部の高さや幅より大きいので、人体候補ではなく、カーブミラー候補であるとして、以降の処理対象から除外する。
【0051】
なお、このステップS4cの判定は、図6に示すように、例えば、車両12がT字路36に向かって走行中である状況(シチュエーション)に適用して好適である。この場合、車両12は、カーブミラー37を構成する支柱38(電柱も含む)に設置されたミラー本体40の正面に向かって走行することとなり、この走行中に取得される赤外線カメラ16の撮像画像において、カーブミラー37を構成する支柱38とミラー本体40の位置関係の変化が小さい。このため、対象物候補30の高さH(又は幅W)と、縦長対象物34dの幅W1を比較することによりカーブミラー37であるか否かを判定することができる。幅比較判定部104cは、例えば、H>W1=hwcdのとき、カーブミラー37であると決定することができる。
【0052】
次に、ステップS4dの大きさ規則変化判定処理が、縦横比(アスペクト比)変化判定部104dで実施される。このステップS4dの判定は、図7に示すように、車両12がL字路42に向かって走行中である場合には、車両12は、支柱38に設置されたミラー本体40を備えるカーブミラー37の側面に向かって走行することに留意している。
【0053】
この場合、図8の特性44から分かるように、赤外線カメラ16での撮像画像では、L字路42の遠方(過去時点)では、対象物候補30がミラー本体40(理解の便宜のために、例えば円形状であるとする。)である場合には、縦長楕円形状に見えているので、縦横比H/Wは、H/W>>1となっていて、接近(現在地点)するに従って、赤外線カメラ16とカーブミラー可能性物体(対象物候補30)との相対角度θ(図7参照)が大きくなるので、ミラー本体40(対象物候補30)の縦横比H/Wは、真円に対応する値1に近づくパターンになる。よって、縦横比H/Wが特性44を有する場合に、対象物候補30を、ミラー本体40を備えるカーブミラー37であると決定して、以降の処理から除外する。なお、対象物候補30が頭部候補であれば、人体の頭部は球形状、あるいは円柱形状で近似できるので、車両12が図7の矢印に示す方向に走行しても、その縦横比H/Wの変化は少ない。
【0054】
次に、ステップS4eの相対位置変化判定処理が、相対位置変化判定部104eで実施される。このステップS4eの判定は、ステップS4cの判定と同様、車両12は、図7に示したように、支柱38に設置されたミラー本体40を備えるカーブミラー37の側面に向かって走行することに留意している。
【0055】
この場合、赤外線カメラ16での撮像画像では、図9Bに示すように、L字路42の遠方(過去時点)では、縦長楕円形状に見えている対象物候補(頭部候補あるいはミラー本体候補)30の中心と、縦長対象物34の軸心との間の相対間隔(相対幅)RWは、狭い間隔になっているが、接近(現在時点)するに従い、対象物候補30の中心と、縦長対象物34の軸心との間の相対間隔RWが広い間隔になってくる。図9Aは、相対間隔RWの特性46を示している。
【0056】
なお、人体では、頭部の中心(円柱の軸心)と胴体部の軸心との間の間隔がそれほどには変化しないので、対象物候補30の中心と縦長対象物34の軸心との間の相対間隔RWの変化が大きい場合には、カーブミラー候補であるとして、以降の処理対象から除外することができる。
【0057】
このようにして、ステップS4a〜S4eからなるステップS4のカーブミラー判定処理を終了した後、図3のステップS5にて、電柱あるいは支柱に設置されたミラー本体を備えるカーブミラーとみなした対象物候補30は、歩行者候補(人体候補)ではないとしてみなして、以降の処理対象から除外されることとなる(ステップS5:YES)。
【0058】
次いで、ステップS6にて、ステップS5までの処理によりカーブミラー候補が除外された残りの画像部分(対象物候補30からカーブミラーが除外された残りの対象物候補30)を対象として、歩行者検知処理部102は、監視対象物としての歩行者を検知する歩行者検知処理を公知の要領にて実施する。
【0059】
歩行者検知処理部102は、ステップS3でラベルが付けられた図10に示す頭部54を備える人体候補(歩行者候補ともいう。)62の外接四角形52より若干大きいマスク領域53(図10中、一点鎖線で囲んだ領域)に対してマスク領域53内の画素の上側から下側にかつ左側から右側に対して画素値を走査しながら探索していき、暗い領域の「0」画素が連続して続いた場合、その走査部分が画像中の歩行者候補62(頭部54と胴体部60と脚部59とから構成される。)と路面51との境界と判定し、対象物の下端OBbmとする。
【0060】
また、そのステップS6にて、歩行者検知処理部102は、対象物の下端OBbmから逆に上側にマスク領域53内の画像に対して左側から右側に画素毎に走査しながら探索していき、垂直方向で輝度の水平エッジの変化区間(2値化画像では、「1」と「0」の対が概ね連続する区間)を検出した場合、その変化区間の走査部分が人体候補62と背景との境界のエッジである対象物の上端OBtmとする。
【0061】
次いで、ステップS7にて、接触可能性判定部106により、ステップS6で検知した歩行者候補62と自車両12との接触可能性について判定する。
【0062】
すなわち、上述したように、接触可能性は、歩行者候補62に対する、上述した(1)式の各接触余裕時間TTCと歩行者候補62の各移動ベクトルとを考慮し(距離Zも考慮してもよい。)、さらに、ブレーキセンサ20、車速センサ18、及びヨーレートセンサ22の各出力であるブレーキ操作量Br、車速Vs、ヨーレートYrと、に基づき、車両12が歩行者候補62に接触する可能性があるかどうかを判定し、接触する可能性があると判定した場合(ステップS7:YES)には、ステップS8において、注意喚起出力生成判定部108は、注意喚起出力を生成し、運転者の注意を喚起する(運転者に情報を提供する)。具体的には、グレースケール画像中の歩行者を目立つ色の枠等により強調表示してHUD26aに表示するとともに、スピーカ24を通じて警報を発生し、車両12の運転者に注意を喚起する。
【0063】
ここでは、注意喚起出力生成判定部108はHUD26aの表示上で、歩行者候補62を、赤色又は黄色等の上述した目立つ色の枠で囲んで注意喚起を促す出力を生成する。
【0064】
[実施形態の概要]
以上説明したように、上述した実施形態に係る車両周辺監視装置10は、車両12に搭載された単一の赤外線カメラ16により撮像した画像からカーブミラー37を除外し、注意喚起出力が必要な監視対象物である歩行者等(動物も含む。)を検知する。
【0065】
この場合、車両周辺監視装置10は、監視対象物としての歩行者であると誤検知する可能性を有するカーブミラー37であるか否かを判定するカーブミラー判定部104を備える。
【0066】
カーブミラー判定部104は、前記画像から略円形の物体又は略四角形の物体をカーブミラー可能性物体、すなわち人体の頭部候補及びミラー本体候補として抽出するカーブミラー可能性物体抽出部104aと、抽出された前記カーブミラー可能性物体の近傍に支柱形状の物体(上記実施形態では、縦長対象物34)の有無を検知する支柱形状物体検知部104bと、を有し、抽出された前記カーブミラー可能性物体の近傍に前記支柱形状の物体が検知された場合、前記カーブミラー可能性物体を前記カーブミラーであると決定する。
【0067】
すなわち、車両12に搭載された単一の赤外線カメラ16により撮像した画像から検知された略円形又は略四角形のカーブミラー可能性物体の近傍に支柱形状の物体が検知された場合には、前記カーブミラー可能性物体が前記支柱形状の物体に取り付けられたカーブミラー37であると決定するので、たとえ、単一の赤外線カメラ16で撮像した場合であっても、カーブミラー可能性物体を歩行者(の頭部)と誤検知する可能性を軽減することができる。
【0068】
なお、支柱形状の物体が電柱である場合には、電柱幅が頭部幅相当であるという知見に基づき、算出された電柱幅とミラー本体幅を比較することによりカーブミラー37を精度よく認識することもできる。画像だけで認識できるので、距離精度の良し悪しによらずに簡単にカーブミラー37を認識することができる。
【0069】
この場合、カーブミラー判定部104は、さらに、幅比較判定部104cを備え、抽出された前記カーブミラー可能性物体(対象物候補30)の幅Wが、検知された前記支柱形状の物体(縦長対象物34)の幅W1(図5参照)よりも大きい場合、前記カーブミラー可能性物体(対象物候補30)を前記カーブミラー37(ミラー本体40)であると決定するようにしてもよい。歩行者の頭部幅hwm(図10参照)は、当該歩行者の胴体部幅Wm(図10参照)と同等以下の幅であるという事実から、抽出された前記カーブミラー可能性物体(対象物候補30)の幅Wが、検知された前記支柱形状の物体(縦長対象物34)の幅W1よりも大きい場合、前記カーブミラー可能性物体(対象物候補30)をカーブミラー37(ミラー本体40)であるとより確実に決定することができる。
【0070】
また、カーブミラー判定部104は、さらに、縦横比変化判定部104dを備え、車両12の移動に伴う、赤外線カメラ16と、抽出された前記カーブミラー可能性物体(対象物候補30)との相対角度θ(図7参照)の変化に伴って、抽出された前記カーブミラー可能性物体(対象物候補30)の縦横比H/Wが図8の特性44で示したように変化した場合に、前記カーブミラー可能性物体(対象物候補30)をカーブミラー37(ミラー本体40)であると決定するようにしてもよい。カーブミラー37(ミラー本体40)は偏平形を有し、歩行者の頭部54は、概ね円柱形(高さhhm×直径hwm:図10参照)であるという事実から、車両12の移動に伴う、赤外線カメラ16と、抽出された前記カーブミラー可能性物体(対象物候補30)との相対角度θの変化に伴って、抽出された前記カーブミラー可能性物体(対象物候補30)の縦横比H/Wが変化した場合に、前記カーブミラー可能性物体(対象物候補30)をカーブミラー37(ミラー本体40)であるとより確実に決定することができる。
【0071】
カーブミラー判定部104は、さらに相対位置変化判定部104eを備え、車両12の移動に伴う、赤外線カメラ16と、抽出された前記カーブミラー可能性物体(対象物候補30)との相対角度θの変化に伴って、抽出された前記カーブミラー可能性物体(対象物候補30)と検知された前記支柱形状の物体(縦長対象物34)との間の距離である相対間隔RWが図9Aの特性46に示すように変化した場合に、前記カーブミラー可能性物体(対象物候補30)をカーブミラー37であると決定するようにしてもよい。歩行者の頭部54の垂直方向の軸線と胴体部60の垂直方向の軸線との間の距離は、車両12の移動に伴う、赤外線カメラ16と、抽出された前記歩行者との相対角度θの変化があっても、変化量が少ないという知見を考慮し、車両12の移動に伴う、赤外線カメラ16と、抽出された前記カーブミラー可能性物体(対象物候補30)との相対角度θの変化に伴って、抽出された前記カーブミラー可能性物体(対象物候補30)と検知された前記支柱形状の物体(縦長対象物34)との間の距離である相対間隔RWが変化した場合に、前記カーブミラー可能性物体(対象物候補30)をカーブミラー37であるとより確実に決定することができる。
【0072】
このように上述した実施形態に係る車両周辺監視装置10によれば、車両12に搭載された赤外線カメラ16により撮像した画像から検知された略円形又は略四角形のカーブミラー可能性物体(対象物候補30)の近傍に支柱形状物体(縦長対象物34)が検知された場合には、前記カーブミラー可能性物体(対象物候補30)が前記支柱形状の物体(縦長対象物34)に取り付けられたミラー本体40と決定するので、たとえ、単一の赤外線カメラ16で撮像した場合であっても、カーブミラー可能性物体(対象物候補30)を歩行者(の頭部)と誤検知する可能性を軽減することができる。
【0073】
なお、この発明は、上述の実施形態に限らず、この明細書の記載内容に基づき、種々の構成を採り得ることはもちろんである。
【0074】
例えば、図11に示すように、車両12Aに搭載された左右一組の赤外線カメラ16R、16Lを備える車両周辺監視装置を用いてもよい。いわゆるステレオカメラとしての赤外線カメラ16R、16Lは、車両12Aの前部バンパー部に、車両12Aの車幅方向中心部に対して略対称な位置に配置されており、2つの赤外線カメラ16R、16Lの光軸が互いに平行であって、かつ両者の路面からの高さが等しくなるように固定されている。この左右一組の赤外線カメラ16R、16Lを備える車両周辺監視装置では、公知のように、左右一組の赤外線カメラ16R、16Lにより撮像した自車両周辺の画像において温度が高い部分を対象物にするとともに、左右画像中の同一対象物の視差等を用いて三角測量の原理により前記対象物までの距離を算出し、前記対象物の移動方向(移動ベクトル)や前記対象物の位置から、車両(自車両)12Aの走行に影響を与えそうな対象物(接触の可能性のある対象物)を検出して注意喚起出力を出力する。
【0075】
また、赤外線カメラを用いることなく、通常の可視領域を撮像する一般的なデジタルビデオカメラ(撮像装置)を実施形態と同様に単一のカメラあるいはステレオカメラとして用いるようにすることもできる。
【0076】
さらにまた、車両12、12Aがナビゲーション装置を搭載している場合には、車両周辺監視装置10(の画像処理ユニット14)が前記ナビゲーション装置と協調動作ができるように構成し、前記ナビゲーション装置から得られる自車位置情報、地図情報及び施設情報等の情報に基づき、車両(自車両)12、12AがT字路36に向かって走行中である状況下(図6)やL字路42に向かって走行中である状況下(図7)であることを把握したとき、あるいはそのような状況下であることを前記ナビゲーション装置から受領したとき、画像処理ユニット14は、幅比較判定部104cによる幅比較処理や、縦横比変化判定部104dによる縦横比変化判定処理及び相対位置変化判定部104eによる相対間隔変化判定処理の発動(開始)を選択して促すようにしてもよい。
【符号の説明】
【0077】
10…車両周辺監視装置 12、12A…車両
14…画像処理ユニット 14c…CPU
14m…記憶部 16、16R、16L…赤外線カメラ
102…歩行者検知処理部 104…カーブミラー判定部
106…接触可能性判定部 108…注意喚起出力生成判定部
【技術分野】
【0001】
この発明は、車両に搭載された赤外線カメラ等により撮像した画像を用いて、前記車両の周辺を監視する車両周辺監視装置に関し、特に夜間や暗所等での走行時に適用して好適な車両周辺監視装置に関する。
【背景技術】
【0002】
従来から、特許文献1に示すように、赤外線カメラにより捉えられた自車両周辺の画像(グレースケール画像とその2値化画像)から、自車両との接触の可能性がある歩行者等の対象物を検知し、検知した対象物を自車両の運転者に提供する車両周辺監視装置が知られている。
【0003】
特許文献1に係る車両周辺監視装置では、左右一組の赤外線カメラ(ステレオカメラ)が撮像した自車両周辺の画像において温度が高い部分を前記対象物として検知すると共に、左右画像中の対象物の視差を求めることにより当該対象物までの距離を算出し、当該対象物の移動方向や当該対象物の位置から、自車両の走行に影響を与えそうな(接触の可能性のある)歩行者等の対象物を検出して警報を出力する(特許文献1の[0014]、[0018])。
【0004】
しかしながら、左右一組の赤外線カメラを用いる車両周辺監視装置は、比較的高価であり、高級車の一部に採用されているのが実状である。
【0005】
コストを低減するために、特許文献2に係る車両周辺監視装置では、車両に搭載された単一の赤外線カメラを用いて、所定時間間隔で車両周辺の対象物を少なくとも2回(2フレーム)撮像する。前回の画像の大きさ(サイズ)に比較して今回の撮像画像における対象物の画像の大きさ(サイズ)の変化は、対象物と車両周辺監視装置搭載車両との相対速度が高いほど大きくなる。そして、車両の前方に存在する対象物は、当該対象物と車両との相対速度が高いほど、車両への到達時間が短くなる。このように、単一の赤外線カメラであっても所定時間間隔での同一の対象物の画像部分の大きさの変化率から、車両への到達時間、いわゆるTTC(Time To Contact or Time To Collision:接触余裕時間)を推定することで車両の周辺を監視することができる(特許文献2の[0006]、[0007]、[0061]、[0066])。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−284057号公報
【特許文献2】特許第4267657号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、電柱等に取り付けられている、道路の曲線などで見通しを助けるためのカーブミラーは、車両の運転者から正対して見た場合、略円形状に見え、歩行者の頭部形状に類似した形状を呈する。
【0008】
この場合、上述のステレオカメラであれば、両カメラの視差に基づき前記カーブミラーの大きさを瞬時に(画像の撮影毎に)算出できることから、前記カーブミラーの大きさが前記歩行者の頭部よりも大きいという事実を考慮して、カーブミラーを歩行者と誤検知(誤認識)することを瞬時に回避することができる。
【0009】
しかしながら、単一のカメラである場合には、前記したように、距離算出に所定時間を必要とするためステレオカメラ程の距離精度を確保することが難しい。従って、単一のカメラを用いる車両周辺監視装置では、前記カーブミラーを前記歩行者と誤検知する可能性がステレオカメラより高く、改善の余地がある。
【0010】
この発明は、このような課題を考慮してなされたものであって、単一の撮像装置で撮像した場合であっても、カーブミラーを歩行者と誤検知する可能性を軽減することができる車両周辺監視装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
この発明に係る車両周辺監視装置は、車両に搭載された撮像装置により撮像した画像を用いて前記車両の周辺を監視する車両周辺監視装置において、監視対象物と誤検知する可能性を有するカーブミラーであるか否かを判定するカーブミラー判定部を備え、前記カーブミラー判定部は、前記画像から略円形の物体又は略四角形の物体をカーブミラー可能性物体として抽出するカーブミラー可能性物体抽出部と、抽出された前記カーブミラー可能性物体の近傍に支柱形状の物体の有無を検知する支柱形状物体検知部と、を有し、抽出された前記カーブミラー可能性物体の近傍に前記支柱形状の物体が検知された場合、前記カーブミラー可能性物体を前記カーブミラーであると決定することを特徴とする。
【0012】
この発明によれば、車両に搭載された撮像装置により撮像した画像から検知された略円形又は略四角形のカーブミラー可能性物体の近傍に支柱形状の物体が検知された場合には、前記カーブミラー可能性物体が前記支柱形状の物体に取り付けられたカーブミラーであると決定するので、たとえ、単一の撮像装置で撮像した場合であっても、カーブミラー可能性物体を監視対象物としての歩行者(の頭部)等と誤検知する可能性を軽減することができる。
【0013】
この場合、前記カーブミラー判定部は、さらに、幅比較判定部を備え、抽出された前記カーブミラー可能性物体の幅が、検知された前記支柱形状の物体の幅よりも大きい場合、前記カーブミラー可能性物体を前記カーブミラーであると決定するようにしてもよい。歩行者の頭部幅は、当該歩行者の胴体部幅と同等以下の幅であるという事実から、抽出された前記カーブミラー可能性物体の幅が、検知された前記支柱形状の物体の幅よりも大きい場合、前記カーブミラー可能性物体を前記カーブミラーであるとより確実に決定することができる。
【0014】
また、前記カーブミラー判定部は、さらに、縦横比変化判定部を備え、前記車両の移動に伴う、前記撮像装置と、抽出された前記カーブミラー可能性物体との相対角度の変化に伴って、抽出された前記カーブミラー可能性物体の縦横比が変化した場合に、前記カーブミラー可能性物体を前記カーブミラーであると決定するようにしてもよい。前記カーブミラーは偏平形を有し、歩行者の頭部は、概ね円柱形であるという事実から、前記車両の移動に伴う、前記撮像装置と、抽出された前記カーブミラー可能性物体との相対角度の変化に伴って、抽出された前記カーブミラー可能性物体の縦横比が変化した場合に、前記カーブミラー可能性物体を前記カーブミラーであるとより確実に決定することができる。
【0015】
前記カーブミラー判定部は、さらに相対位置変化判定部を備え、前記車両の移動に伴う、前記撮像装置と、抽出された前記カーブミラー可能性物体との相対角度の変化に伴って、抽出された前記カーブミラー可能性物体と検知された前記支柱形状の物体との間の距離が変化した場合に、前記カーブミラー可能性物体を前記カーブミラーであると決定するようにしてもよい。歩行者の頭部と胴体部との間の距離は、前記車両の移動に伴う、前記撮像装置と、抽出された前記歩行者との相対角度の変化があっても、変化量が少ないという知見を考慮し、前記車両の移動に伴う、前記撮像装置と、抽出された前記カーブミラー可能性物体との相対角度の変化に伴って、抽出された前記カーブミラー可能性物体と検知された前記支柱形状の物体との間の距離が変化した場合に、前記カーブミラー可能性物体を前記カーブミラーであるより確実に決定することができる。
【発明の効果】
【0016】
この発明によれば、車両に搭載された撮像装置により撮像した画像から検知された略円形又は略四角形のカーブミラー可能性物体の近傍に支柱形状の物体が検知された場合には、前記カーブミラー可能性物体が前記支柱形状の物体に取り付けられたカーブミラーと決定するので、たとえ、単一の撮像装置で撮像した場合であっても、カーブミラー可能性物体を監視対象物と誤検知する可能性を軽減することができる。
【図面の簡単な説明】
【0017】
【図1】この発明の一実施形態に係る車両周辺監視装置の構成を示すブロック図である。
【図2】図1に示す車両周辺監視装置が搭載された車両の模式図である。
【図3】車両周辺監視装置の画像処理ユニットによる動作を説明するフローチャートである。
【図4】カーブミラー判定処理を説明する詳細なフローチャートである。
【図5】縦長対象物探索処理に参照される説明図である。
【図6】幅比較処理に参照される説明図である。
【図7】大きさ規則変化判定処理及び相対位置変化判定処理に参照される説明図である。
【図8】大きさ規則変化判定処理の説明に供される特性図である。
【図9】図9Aは、相対間隔の変化特性図、図9Bは、相対間隔の説明図である。
【図10】歩行者検知処理に供される歩行者の画像の模式図である。
【図11】変形例に係る車両周辺監視装置が搭載された車両の模式図である。
【発明を実施するための形態】
【0018】
以下、この発明の実施形態について図面を参照して説明する。
【0019】
図1は、この発明の一実施形態に係る車両周辺監視装置10の構成を示すブロック図である。図2は、図1に示す車両周辺監視装置10が搭載された車両(自車両ともいう。)12の模式図である。
【0020】
図1及び図2において、車両周辺監視装置10は、該車両周辺監視装置10を制御する画像処理ユニット14と、この画像処理ユニット14に接続される単一(単眼)の赤外線カメラ16(撮像装置)と、車両12の車速Vsを検出する車速センサ18と、運転者によるブレーキペダルの操作量(ブレーキ操作量)Brを検出するブレーキセンサ20と、車両12のヨーレートYrを検出するヨーレートセンサ22と、音声で警報等を発するためのスピーカ24と、赤外線カメラ16により撮影された画像を表示し、接触の危険性が高い歩行者等の対象物(移動対象物、監視対象物)を車両12の運転者に認識させるためのHUD(Head Up Display)26a等を含む画像表示装置26と、を備える。
【0021】
画像表示装置26としては、HUD(ヘッドアップディスプレイ)26aに限らず、車両12に搭載されたナビゲーションシステムの地図等を表示するディスプレイや、メータユニット内等に設けられた燃費等を表示するディスプレイ(マルチインフォメーションディスプレイ)を利用することができる。
【0022】
画像処理ユニット14は、車両12の周辺の赤外線画像と車両の走行状態を示す信号(ここでは、車速Vs、ブレーキ操作量Br及びヨーレートYr)とから、車両前方の歩行者等の監視対象物を検出し、当該監視対象物との接触の可能性が高いと判断したときにスピーカ24から警報(例えば、ピッ、ピッ、…となる音)を発するとともに、HUD26a上にグレースケール表示される撮像画像の中の監視対象物を、黄色や赤色等の目立つ色枠で囲って強調表示する。このようにして、運転者の注意を喚起する。
【0023】
ここで、画像処理ユニット14は、入力アナログ信号をデジタル信号に変換するA/D変換回路等の入力回路と、デジタル化した画像信号を記憶する画像メモリ(記憶部14m)と、各種演算処理を行うCPU(中央処理装置)14cと、CPU14cが演算途中のデータを記憶するために使用するRAM(Random Access Memory)やCPU14cが実行するプログラムやテーブル、マップ及びテンプレート{歩行者(人体)形状テンプレート:右向き、左向き、正面(背面)向き、カーブミラー形状テンプレート等}を記憶するROM(Read Only Memory)等の記憶部14mと、クロック(時計部)及びタイマ(計時部)と、スピーカ24の駆動信号と画像表示装置26の表示信号などを出力する出力回路等を備えており、赤外線カメラ16、ヨーレートセンサ22、車速センサ18、及びブレーキセンサ20の各出力信号は、デジタル信号に変換されてCPU14cに入力されるように構成されている。
【0024】
画像処理ユニット14のCPU14cは、これらデジタル信号を取り込み、テーブル、マップ、及びテンプレート等を参照しながらプログラムを実行することで、各種機能手段(機能部ともいう。)として機能し、スピーカ24及び画像表示装置26に駆動信号(音声信号や表示信号)を送出する。これらの機能は、ハードウエアにより実現することもできる。
【0025】
この実施形態において、画像処理ユニット14は、それぞれ詳細を後述する歩行者検知処理部102、カーブミラー判定部104、接触可能性判定部106、及び注意喚起出力生成判定部108等の前記機能部を有する。ここで、カーブミラー判定部104は、カーブミラー可能性物体抽出部104a、支柱形状物体検知部104b、幅比較判定部104c、縦横比変化判定部104d、相対位置変化判定部104e等を備える。
【0026】
なお、画像処理ユニット14は、基本的には、赤外線カメラ16により取得した画像と、記憶部14mに記憶されている人体形状、動物形状、車両形状、及び電柱を含む支柱等の人工構造物形状等の模式的なテンプレートと比較して物体を認識する物体認識処理(物体検知処理)プログラムを実行する。
【0027】
図2に示すように、赤外線カメラ16は、車両12の前部バンパー部に、車両12の車幅方向中心部に、光軸が車軸と平行に配置されており、撮像対象(物体)の温度が高いほど、その出力信号(撮像信号)レベルが高くなる(輝度が増加する)特性を有している。
【0028】
また、HUD26aは、車両12のフロントウインドシールド上、運転者の前方視界を妨げない位置に表示画面が表示されるように設けられている。
【0029】
ここで、画像処理ユニット14は、赤外線カメラ16から出力されるアナログの映像信号を、数十ms、例えば、1秒/30フレーム[ms]のフレームクロック間隔・周期毎にデジタルデータに変換して記憶部14m(画像メモリ)に取り込み、記憶部14mに取り込んだ車両前方の画像に対して各種演算処理を行う上述した機能を有する。
【0030】
歩行者検知処理部102は、記憶部14mに取り込んだ車両前方の前記画像から歩行者等の監視対象物の画像部分を抽出する。注意喚起出力生成判定部108は、前記フレームクロック間隔・周期(所定時間間隔)をもって撮像された画像間における同一の監視対象物の画像部分の大きさの変化率Rateを算出し、さらに前記変化率Rateを用いて監視対象物が車両12に到達するまでの時間Tを推定するとともに、監視対象物の実空間における位置を算出し、監視対象物の実空間における移動ベクトルを算出する。
【0031】
監視対象物が車両12に到達するまでの時間(接触余裕時間ともいう。)TTC、換言すれば、車両12が監視対象物に接触するまでの時間TTCは、前記変化率Rate(画像から求める。)と、所定時間間隔である撮像間隔(フレームクロック周期)dT(既知)とから、公知の要領にて、例えば、特許文献2に示されるように、次の(1)式により求めることができる。
TTC=dT×Rate/(1−Rate) …(1)
【0032】
なお、変化率Rateは、監視対象物の前回の撮像時の画像中の監視対象物の幅又は長さW0(それぞれ画素数で記憶しておけばよい。)と、今回の撮像時の画像中の同一監視対象物の幅又は長さW1(画素数)との比(Rate=W0/W1)で求めることができる。
【0033】
また、監視対象物までの距離Zは、特許文献2に示されるように、次の(2)式により求めることができる。なお、(2)式において、Vsは、より正確には、監視対象物と車両12間の相対速度とされる。監視対象物が停止している場合には、相対速度は、車速Vsに等しい。
Z=Rate×Vs×dT/(1−Rate) …(2)
【0034】
さらに、注意喚起出力生成判定部108は、算出した前記接触余裕時間TTCと、所定時間間隔をもって撮像された前記画像間における同一の監視対象物の画像部分の位置変化量Δx(水平方向),Δy(垂直方向)を算出し、算出した位置変化量(移動ベクトル)Δx,Δyと、に基づいて監視対象物と車両12との接触可能性を判定する。
【0035】
カーブミラー判定部104は、記憶部14mに取り込んだ車両前方の前記画像から抽出された監視対象物の画像部分において、後述するように、歩行者(の頭部)であるかカーブミラーであるかを判別することで、カーブミラーである場合には、監視対象物から除外する処理を行う。
【0036】
基本的には以上にように構成され、かつ動作するこの実施形態に係る車両周辺監視装置10の詳細な動作について、図3のフローチャートを参照しながら説明する。
【0037】
まず、ステップS1において、画像処理ユニット14は、車速センサ18により検出される車速Vs等から車両12の走行状態(走行中か停車中)を判定し、停車中(ステップS1:NO)である場合には、処理を停止する。
【0038】
走行中(ステップS1:YES)である場合、ステップS2において、画像処理ユニット14は、赤外線カメラ16によりフレーム毎に撮像された車両前方の所定画角範囲のフレーム毎の出力信号である赤外線画像を取得し、A/D変換し、グレースケール画像を画像メモリ(記憶部14m)に格納するとともに、格納したグレースケール画像の2値化処理、すなわち、輝度閾値より明るい領域を「1」(白)とし、暗い領域を「0」(黒)とする2値化画像への変換処理を行い、変換した2値化画像も前記フレームに対応させてフレーム毎に記憶部14mに格納する。この2値化処理では、閾値の選び方によるが、人体では頭部、肩、胴体、及び2本の脚等からなる塊(人体対象物候補)が、「1」の塊(集合体)として検出される。また、電柱等の支柱に取り付けられているカーブミラーでは、ミラー本体と支柱とが、「1」の塊(集合体)として検出される。
【0039】
この場合、ステップS3にて、画像処理ユニット14は、フレーム(画像)毎の2値化画像の「1」(白)をx方向(水平方向)の走査ライン毎にランレングスデータに変換し、y方向(垂直方向)に重なる部分のあるラインを1つの対象物とみなし、当該対象物にそれぞれラベルを付け、対象物候補とするラベリング処理を行う。この場合、頭部候補を備える人体候補(歩行者候補、監視対象物)と、ミラー本体候補を備えるカーブミラー候補(監視不要物)にラベルが付けられる。
【0040】
次いで、ステップS4にて、カーブミラー判定部104は、ラベルが付けられた対象物候補(頭部候補を備える人体候補とミラー本体候補を備えるカーブミラー候補)からカーブミラー候補を対象物(接触可能性のある対象物)から外すためのカーブミラー判定処理を行う。
【0041】
図4は、ステップS4のカーブミラー判定処理の詳細フローチャートを示している。
【0042】
まず、ステップS4aの縦横比判定処理が、カーブミラー可能性物体抽出部104aで実施される。
【0043】
カーブミラー可能性物体抽出部104aは、それぞれラベルが付けられた頭部候補を備える人体候補とミラー本体候補を備えるカーブミラー候補中、円形状、楕円形状あるいは四角形状を呈する前記頭部候補及び前記ミラー本体候補のどちらもカーブミラー可能性物体として抽出し、抽出したカーブミラー可能性物体を構成する前記頭部候補及び前記ミラー本体候補のそれぞれにつき、縦の長さ(H)と横の長さ(W)の比H/Wが、人体の頭部と推定する下記の(3)式の条件{横の長さWに対する縦の長さHの比が、1/2以上〜2の間の値}に当てはまるか否かを判定する。
1/2≦H/W≦2 …(3)
【0044】
(3)式の条件に当てはまらない対象物候補は、前記頭部候補ではなく前記ミラー本体候補を備えるカーブミラー候補であるとして、以降の処理対象から除外する。
【0045】
次いで、ステップS4bの縦長対象物探索処理が、支柱形状物体検知部104bで実施される。
【0046】
この場合、支柱形状物体検知部104bは、ステップS4aの処理で残された(除外されなかった)対象物候補(頭部候補を備える人体候補とミラー本体候補を備えるカーブミラー候補)のグレースケール画像等を参照し、例えば、図5に示すように、大きさが縦(高さ)H、横(幅)Wの対象物候補(この対象物候補は、上記した頭部候補あるいはミラー本体候補)30の上下に、大きさが、例えば、縦が対象物候補30の縦Hと同じ長さH、横が対象物候補30の幅Wの3倍の長さ(幅)W×3の面積を有する上部マスク領域32uと下部マスク領域32dを設定する。
【0047】
一般に、電柱に設置されているカーブミラーの場合には、対象物候補30に接する上部マスク領域32u内と下部マスク領域32d内に縦長対象物である支柱形状の物体が存在し、かつ上部マスク領域32u内で抽出される支柱形状の物体の特徴と下部マスク領域32d内で抽出される支柱形状の物体の特徴が類似するはずである。
【0048】
ここで、特徴は、例えば、垂直エッジや輝度プロファイルであり、支柱形状物体検知部104bによる類似判定は、例えば、上部マスク領域32u内と下部マスク領域32d内で算出された垂直エッジ幅hwcu、hwcdの差分が閾値Δth以内であるか否か(|hwcu−hwcd|≦Δth)、又は輝度プロファイル幅の差分が閾値以内であるか否かにより行う。
【0049】
ステップS4bにて、対象物候補30の上下に縦長対象物34u、34d(縦長対象物34又は支柱形状の物体34ともいう。)が検知された場合、カーブミラー判定部104は、図5に示す対象物候補30、すなわちミラー本体候補は、電柱に設置されているカーブミラー候補であると決定して、以降の処理対象から除外する。
【0050】
次に、ステップS4cの幅比較処理が、幅比較判定部104cで実施される。この場合、幅比較判定部104cは、ステップS4bにて下部マスク領域32dで抽出された垂直エッジ幅hwcd(縦長対象物34dの幅W1という。)と、対象物候補30の高さH(又は幅W)とを比較し対象物候補30の高さH(又は幅W)が、縦長対象物34dの幅W1より大きい場合(H>W1=hwcd)には、対象物候補30は、人体候補ではなく、カーブミラー候補であるとみなして以降の処理対象から除外する。一般に、ミラー本体の高さH(又は幅W)は、ミラー本体を取り付ける支柱(ポール)や電柱の幅(太さ)よりも大きく、人体では、胴体部の幅が頭部の高さや幅より大きいので、人体候補ではなく、カーブミラー候補であるとして、以降の処理対象から除外する。
【0051】
なお、このステップS4cの判定は、図6に示すように、例えば、車両12がT字路36に向かって走行中である状況(シチュエーション)に適用して好適である。この場合、車両12は、カーブミラー37を構成する支柱38(電柱も含む)に設置されたミラー本体40の正面に向かって走行することとなり、この走行中に取得される赤外線カメラ16の撮像画像において、カーブミラー37を構成する支柱38とミラー本体40の位置関係の変化が小さい。このため、対象物候補30の高さH(又は幅W)と、縦長対象物34dの幅W1を比較することによりカーブミラー37であるか否かを判定することができる。幅比較判定部104cは、例えば、H>W1=hwcdのとき、カーブミラー37であると決定することができる。
【0052】
次に、ステップS4dの大きさ規則変化判定処理が、縦横比(アスペクト比)変化判定部104dで実施される。このステップS4dの判定は、図7に示すように、車両12がL字路42に向かって走行中である場合には、車両12は、支柱38に設置されたミラー本体40を備えるカーブミラー37の側面に向かって走行することに留意している。
【0053】
この場合、図8の特性44から分かるように、赤外線カメラ16での撮像画像では、L字路42の遠方(過去時点)では、対象物候補30がミラー本体40(理解の便宜のために、例えば円形状であるとする。)である場合には、縦長楕円形状に見えているので、縦横比H/Wは、H/W>>1となっていて、接近(現在地点)するに従って、赤外線カメラ16とカーブミラー可能性物体(対象物候補30)との相対角度θ(図7参照)が大きくなるので、ミラー本体40(対象物候補30)の縦横比H/Wは、真円に対応する値1に近づくパターンになる。よって、縦横比H/Wが特性44を有する場合に、対象物候補30を、ミラー本体40を備えるカーブミラー37であると決定して、以降の処理から除外する。なお、対象物候補30が頭部候補であれば、人体の頭部は球形状、あるいは円柱形状で近似できるので、車両12が図7の矢印に示す方向に走行しても、その縦横比H/Wの変化は少ない。
【0054】
次に、ステップS4eの相対位置変化判定処理が、相対位置変化判定部104eで実施される。このステップS4eの判定は、ステップS4cの判定と同様、車両12は、図7に示したように、支柱38に設置されたミラー本体40を備えるカーブミラー37の側面に向かって走行することに留意している。
【0055】
この場合、赤外線カメラ16での撮像画像では、図9Bに示すように、L字路42の遠方(過去時点)では、縦長楕円形状に見えている対象物候補(頭部候補あるいはミラー本体候補)30の中心と、縦長対象物34の軸心との間の相対間隔(相対幅)RWは、狭い間隔になっているが、接近(現在時点)するに従い、対象物候補30の中心と、縦長対象物34の軸心との間の相対間隔RWが広い間隔になってくる。図9Aは、相対間隔RWの特性46を示している。
【0056】
なお、人体では、頭部の中心(円柱の軸心)と胴体部の軸心との間の間隔がそれほどには変化しないので、対象物候補30の中心と縦長対象物34の軸心との間の相対間隔RWの変化が大きい場合には、カーブミラー候補であるとして、以降の処理対象から除外することができる。
【0057】
このようにして、ステップS4a〜S4eからなるステップS4のカーブミラー判定処理を終了した後、図3のステップS5にて、電柱あるいは支柱に設置されたミラー本体を備えるカーブミラーとみなした対象物候補30は、歩行者候補(人体候補)ではないとしてみなして、以降の処理対象から除外されることとなる(ステップS5:YES)。
【0058】
次いで、ステップS6にて、ステップS5までの処理によりカーブミラー候補が除外された残りの画像部分(対象物候補30からカーブミラーが除外された残りの対象物候補30)を対象として、歩行者検知処理部102は、監視対象物としての歩行者を検知する歩行者検知処理を公知の要領にて実施する。
【0059】
歩行者検知処理部102は、ステップS3でラベルが付けられた図10に示す頭部54を備える人体候補(歩行者候補ともいう。)62の外接四角形52より若干大きいマスク領域53(図10中、一点鎖線で囲んだ領域)に対してマスク領域53内の画素の上側から下側にかつ左側から右側に対して画素値を走査しながら探索していき、暗い領域の「0」画素が連続して続いた場合、その走査部分が画像中の歩行者候補62(頭部54と胴体部60と脚部59とから構成される。)と路面51との境界と判定し、対象物の下端OBbmとする。
【0060】
また、そのステップS6にて、歩行者検知処理部102は、対象物の下端OBbmから逆に上側にマスク領域53内の画像に対して左側から右側に画素毎に走査しながら探索していき、垂直方向で輝度の水平エッジの変化区間(2値化画像では、「1」と「0」の対が概ね連続する区間)を検出した場合、その変化区間の走査部分が人体候補62と背景との境界のエッジである対象物の上端OBtmとする。
【0061】
次いで、ステップS7にて、接触可能性判定部106により、ステップS6で検知した歩行者候補62と自車両12との接触可能性について判定する。
【0062】
すなわち、上述したように、接触可能性は、歩行者候補62に対する、上述した(1)式の各接触余裕時間TTCと歩行者候補62の各移動ベクトルとを考慮し(距離Zも考慮してもよい。)、さらに、ブレーキセンサ20、車速センサ18、及びヨーレートセンサ22の各出力であるブレーキ操作量Br、車速Vs、ヨーレートYrと、に基づき、車両12が歩行者候補62に接触する可能性があるかどうかを判定し、接触する可能性があると判定した場合(ステップS7:YES)には、ステップS8において、注意喚起出力生成判定部108は、注意喚起出力を生成し、運転者の注意を喚起する(運転者に情報を提供する)。具体的には、グレースケール画像中の歩行者を目立つ色の枠等により強調表示してHUD26aに表示するとともに、スピーカ24を通じて警報を発生し、車両12の運転者に注意を喚起する。
【0063】
ここでは、注意喚起出力生成判定部108はHUD26aの表示上で、歩行者候補62を、赤色又は黄色等の上述した目立つ色の枠で囲んで注意喚起を促す出力を生成する。
【0064】
[実施形態の概要]
以上説明したように、上述した実施形態に係る車両周辺監視装置10は、車両12に搭載された単一の赤外線カメラ16により撮像した画像からカーブミラー37を除外し、注意喚起出力が必要な監視対象物である歩行者等(動物も含む。)を検知する。
【0065】
この場合、車両周辺監視装置10は、監視対象物としての歩行者であると誤検知する可能性を有するカーブミラー37であるか否かを判定するカーブミラー判定部104を備える。
【0066】
カーブミラー判定部104は、前記画像から略円形の物体又は略四角形の物体をカーブミラー可能性物体、すなわち人体の頭部候補及びミラー本体候補として抽出するカーブミラー可能性物体抽出部104aと、抽出された前記カーブミラー可能性物体の近傍に支柱形状の物体(上記実施形態では、縦長対象物34)の有無を検知する支柱形状物体検知部104bと、を有し、抽出された前記カーブミラー可能性物体の近傍に前記支柱形状の物体が検知された場合、前記カーブミラー可能性物体を前記カーブミラーであると決定する。
【0067】
すなわち、車両12に搭載された単一の赤外線カメラ16により撮像した画像から検知された略円形又は略四角形のカーブミラー可能性物体の近傍に支柱形状の物体が検知された場合には、前記カーブミラー可能性物体が前記支柱形状の物体に取り付けられたカーブミラー37であると決定するので、たとえ、単一の赤外線カメラ16で撮像した場合であっても、カーブミラー可能性物体を歩行者(の頭部)と誤検知する可能性を軽減することができる。
【0068】
なお、支柱形状の物体が電柱である場合には、電柱幅が頭部幅相当であるという知見に基づき、算出された電柱幅とミラー本体幅を比較することによりカーブミラー37を精度よく認識することもできる。画像だけで認識できるので、距離精度の良し悪しによらずに簡単にカーブミラー37を認識することができる。
【0069】
この場合、カーブミラー判定部104は、さらに、幅比較判定部104cを備え、抽出された前記カーブミラー可能性物体(対象物候補30)の幅Wが、検知された前記支柱形状の物体(縦長対象物34)の幅W1(図5参照)よりも大きい場合、前記カーブミラー可能性物体(対象物候補30)を前記カーブミラー37(ミラー本体40)であると決定するようにしてもよい。歩行者の頭部幅hwm(図10参照)は、当該歩行者の胴体部幅Wm(図10参照)と同等以下の幅であるという事実から、抽出された前記カーブミラー可能性物体(対象物候補30)の幅Wが、検知された前記支柱形状の物体(縦長対象物34)の幅W1よりも大きい場合、前記カーブミラー可能性物体(対象物候補30)をカーブミラー37(ミラー本体40)であるとより確実に決定することができる。
【0070】
また、カーブミラー判定部104は、さらに、縦横比変化判定部104dを備え、車両12の移動に伴う、赤外線カメラ16と、抽出された前記カーブミラー可能性物体(対象物候補30)との相対角度θ(図7参照)の変化に伴って、抽出された前記カーブミラー可能性物体(対象物候補30)の縦横比H/Wが図8の特性44で示したように変化した場合に、前記カーブミラー可能性物体(対象物候補30)をカーブミラー37(ミラー本体40)であると決定するようにしてもよい。カーブミラー37(ミラー本体40)は偏平形を有し、歩行者の頭部54は、概ね円柱形(高さhhm×直径hwm:図10参照)であるという事実から、車両12の移動に伴う、赤外線カメラ16と、抽出された前記カーブミラー可能性物体(対象物候補30)との相対角度θの変化に伴って、抽出された前記カーブミラー可能性物体(対象物候補30)の縦横比H/Wが変化した場合に、前記カーブミラー可能性物体(対象物候補30)をカーブミラー37(ミラー本体40)であるとより確実に決定することができる。
【0071】
カーブミラー判定部104は、さらに相対位置変化判定部104eを備え、車両12の移動に伴う、赤外線カメラ16と、抽出された前記カーブミラー可能性物体(対象物候補30)との相対角度θの変化に伴って、抽出された前記カーブミラー可能性物体(対象物候補30)と検知された前記支柱形状の物体(縦長対象物34)との間の距離である相対間隔RWが図9Aの特性46に示すように変化した場合に、前記カーブミラー可能性物体(対象物候補30)をカーブミラー37であると決定するようにしてもよい。歩行者の頭部54の垂直方向の軸線と胴体部60の垂直方向の軸線との間の距離は、車両12の移動に伴う、赤外線カメラ16と、抽出された前記歩行者との相対角度θの変化があっても、変化量が少ないという知見を考慮し、車両12の移動に伴う、赤外線カメラ16と、抽出された前記カーブミラー可能性物体(対象物候補30)との相対角度θの変化に伴って、抽出された前記カーブミラー可能性物体(対象物候補30)と検知された前記支柱形状の物体(縦長対象物34)との間の距離である相対間隔RWが変化した場合に、前記カーブミラー可能性物体(対象物候補30)をカーブミラー37であるとより確実に決定することができる。
【0072】
このように上述した実施形態に係る車両周辺監視装置10によれば、車両12に搭載された赤外線カメラ16により撮像した画像から検知された略円形又は略四角形のカーブミラー可能性物体(対象物候補30)の近傍に支柱形状物体(縦長対象物34)が検知された場合には、前記カーブミラー可能性物体(対象物候補30)が前記支柱形状の物体(縦長対象物34)に取り付けられたミラー本体40と決定するので、たとえ、単一の赤外線カメラ16で撮像した場合であっても、カーブミラー可能性物体(対象物候補30)を歩行者(の頭部)と誤検知する可能性を軽減することができる。
【0073】
なお、この発明は、上述の実施形態に限らず、この明細書の記載内容に基づき、種々の構成を採り得ることはもちろんである。
【0074】
例えば、図11に示すように、車両12Aに搭載された左右一組の赤外線カメラ16R、16Lを備える車両周辺監視装置を用いてもよい。いわゆるステレオカメラとしての赤外線カメラ16R、16Lは、車両12Aの前部バンパー部に、車両12Aの車幅方向中心部に対して略対称な位置に配置されており、2つの赤外線カメラ16R、16Lの光軸が互いに平行であって、かつ両者の路面からの高さが等しくなるように固定されている。この左右一組の赤外線カメラ16R、16Lを備える車両周辺監視装置では、公知のように、左右一組の赤外線カメラ16R、16Lにより撮像した自車両周辺の画像において温度が高い部分を対象物にするとともに、左右画像中の同一対象物の視差等を用いて三角測量の原理により前記対象物までの距離を算出し、前記対象物の移動方向(移動ベクトル)や前記対象物の位置から、車両(自車両)12Aの走行に影響を与えそうな対象物(接触の可能性のある対象物)を検出して注意喚起出力を出力する。
【0075】
また、赤外線カメラを用いることなく、通常の可視領域を撮像する一般的なデジタルビデオカメラ(撮像装置)を実施形態と同様に単一のカメラあるいはステレオカメラとして用いるようにすることもできる。
【0076】
さらにまた、車両12、12Aがナビゲーション装置を搭載している場合には、車両周辺監視装置10(の画像処理ユニット14)が前記ナビゲーション装置と協調動作ができるように構成し、前記ナビゲーション装置から得られる自車位置情報、地図情報及び施設情報等の情報に基づき、車両(自車両)12、12AがT字路36に向かって走行中である状況下(図6)やL字路42に向かって走行中である状況下(図7)であることを把握したとき、あるいはそのような状況下であることを前記ナビゲーション装置から受領したとき、画像処理ユニット14は、幅比較判定部104cによる幅比較処理や、縦横比変化判定部104dによる縦横比変化判定処理及び相対位置変化判定部104eによる相対間隔変化判定処理の発動(開始)を選択して促すようにしてもよい。
【符号の説明】
【0077】
10…車両周辺監視装置 12、12A…車両
14…画像処理ユニット 14c…CPU
14m…記憶部 16、16R、16L…赤外線カメラ
102…歩行者検知処理部 104…カーブミラー判定部
106…接触可能性判定部 108…注意喚起出力生成判定部
【特許請求の範囲】
【請求項1】
車両に搭載された撮像装置により撮像した画像を用いて前記車両の周辺を監視する車両周辺監視装置において、
監視対象物と誤検知する可能性を有するカーブミラーであるか否かを判定するカーブミラー判定部を備え、
前記カーブミラー判定部は、
前記画像から略円形の物体又は略四角形の物体をカーブミラー可能性物体として抽出するカーブミラー可能性物体抽出部と、
抽出された前記カーブミラー可能性物体の近傍に支柱形状の物体の有無を検知する支柱形状物体検知部と、を有し、
抽出された前記カーブミラー可能性物体の近傍に前記支柱形状の物体が検知された場合、前記カーブミラー可能性物体を前記カーブミラーであると決定する
ことを特徴とする車両周辺監視装置。
【請求項2】
請求項1記載の車両周辺監視装置において、
前記カーブミラー判定部は、
抽出された前記カーブミラー可能性物体の幅が、検知された前記支柱形状の物体の幅よりも大きい場合、前記カーブミラー可能性物体を前記カーブミラーであると決定する幅比較判定部をさらに備える
ことを特徴とする車両周辺監視装置。
【請求項3】
請求項1又2記載の車両周辺監視装置において、
前記カーブミラー判定部は、
前記車両の移動に伴う、前記撮像装置と、抽出された前記カーブミラー可能性物体との相対角度の変化に伴って、抽出された前記カーブミラー可能性物体の縦横比が変化した場合に、前記カーブミラー可能性物体を前記カーブミラーであると決定する縦横比変化判定部をさらに備える
ことを特徴とする車両周辺監視装置。
【請求項4】
請求項1〜3のいずれか1項に記載の車両周辺監視装置において、
前記カーブミラー判定部は、
前記車両の移動に伴う、前記撮像装置と、抽出された前記カーブミラー可能性物体との相対角度の変化に伴って、抽出された前記カーブミラー可能性物体と検知された前記支柱形状の物体との間の距離が変化した場合に、前記カーブミラー可能性物体を前記カーブミラーであると決定する相対位置変化判定部をさらに備える
ことを特徴とする車両周辺監視装置。
【請求項1】
車両に搭載された撮像装置により撮像した画像を用いて前記車両の周辺を監視する車両周辺監視装置において、
監視対象物と誤検知する可能性を有するカーブミラーであるか否かを判定するカーブミラー判定部を備え、
前記カーブミラー判定部は、
前記画像から略円形の物体又は略四角形の物体をカーブミラー可能性物体として抽出するカーブミラー可能性物体抽出部と、
抽出された前記カーブミラー可能性物体の近傍に支柱形状の物体の有無を検知する支柱形状物体検知部と、を有し、
抽出された前記カーブミラー可能性物体の近傍に前記支柱形状の物体が検知された場合、前記カーブミラー可能性物体を前記カーブミラーであると決定する
ことを特徴とする車両周辺監視装置。
【請求項2】
請求項1記載の車両周辺監視装置において、
前記カーブミラー判定部は、
抽出された前記カーブミラー可能性物体の幅が、検知された前記支柱形状の物体の幅よりも大きい場合、前記カーブミラー可能性物体を前記カーブミラーであると決定する幅比較判定部をさらに備える
ことを特徴とする車両周辺監視装置。
【請求項3】
請求項1又2記載の車両周辺監視装置において、
前記カーブミラー判定部は、
前記車両の移動に伴う、前記撮像装置と、抽出された前記カーブミラー可能性物体との相対角度の変化に伴って、抽出された前記カーブミラー可能性物体の縦横比が変化した場合に、前記カーブミラー可能性物体を前記カーブミラーであると決定する縦横比変化判定部をさらに備える
ことを特徴とする車両周辺監視装置。
【請求項4】
請求項1〜3のいずれか1項に記載の車両周辺監視装置において、
前記カーブミラー判定部は、
前記車両の移動に伴う、前記撮像装置と、抽出された前記カーブミラー可能性物体との相対角度の変化に伴って、抽出された前記カーブミラー可能性物体と検知された前記支柱形状の物体との間の距離が変化した場合に、前記カーブミラー可能性物体を前記カーブミラーであると決定する相対位置変化判定部をさらに備える
ことを特徴とする車両周辺監視装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−92863(P2013−92863A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−233708(P2011−233708)
【出願日】平成23年10月25日(2011.10.25)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月25日(2011.10.25)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]