
車両姿勢制御装置
【課題】湾曲した道路を車両が走行するときの車両の操縦性の向上に貢献する車両姿勢制御装置を提供する。
【解決手段】車両姿勢制御装置4は、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7と、車両1の目標姿勢を決定する演算装置49とを備え、前輪制御装置6および後輪制御装置7が、車両1の姿勢を、演算装置49により決定された目標姿勢に近づける。演算装置49は、車両1が走行している湾曲した道路の曲率に係る情報、および湾曲した道路の幅方向における車両1の位置に係る情報の少なくとも一方の情報に基づいて、道路の湾曲に沿って曲がる曲線の接線に対して車両1の前後方向に延びる左右中心軸のなす角度を決定する。
【解決手段】車両姿勢制御装置4は、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7と、車両1の目標姿勢を決定する演算装置49とを備え、前輪制御装置6および後輪制御装置7が、車両1の姿勢を、演算装置49により決定された目標姿勢に近づける。演算装置49は、車両1が走行している湾曲した道路の曲率に係る情報、および湾曲した道路の幅方向における車両1の位置に係る情報の少なくとも一方の情報に基づいて、道路の湾曲に沿って曲がる曲線の接線に対して車両1の前後方向に延びる左右中心軸のなす角度を決定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の姿勢を制御する姿勢制御部と、車両の目標姿勢を決定する姿勢決定部とを備え、姿勢制御部が、車両の姿勢を、姿勢決定部により決定された目標姿勢に近づける車両姿勢制御装置に関する。
【背景技術】
【0002】
特許文献1の車両の姿勢制御装置は、車両の現在の走行位置を基点とした所定時間後の走行位置を演算する走行位置推定手段と、現在の走行位置から走行位置推定手段により推定された所定時間後の走行位置への方向に中心軸を設定し、この中心軸周りに車体を回転する姿勢最適化制御を実行する姿勢調節手段とを有する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−123610号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般的に、車両姿勢制御装置は、車両の操縦性が向上するために、車体すべり角を0に近づけることにより、車両の進行方向と車両の前方とが一致するように車両の姿勢を制御する。しかし、車両が走行する道路の湾曲は様々な態様であるため、車両の進行方向と車両の前方とを一致させることが必ずしも操縦性を向上させることにはならない。よって、特許文献1の姿勢制御装置は、湾曲した道路を車両が走行するときの車両の操縦性を向上させることができないおそれがある。
【0005】
本発明は、上記課題を解決するため、湾曲した道路を車両が走行するときの車両の操縦性の向上に貢献する車両姿勢制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)第1の手段は、請求項1に記載の発明すなわち、車両の姿勢を制御する姿勢制御部と、前記車両の目標姿勢を決定する姿勢決定部とを備え、前記姿勢制御部が、前記車両の姿勢を、前記姿勢決定部により決定された前記目標姿勢に近づける車両姿勢制御装置において、前記姿勢決定部が、前記車両が走行している湾曲した道路の曲率に係る情報、および湾曲した道路の幅方向における前記車両の位置に係る情報の少なくとも一方の情報に基づいて、道路の湾曲に沿って曲がる曲線の接線に対して前記車両の前後方向に延びる左右中心軸のなす角度を決定することを要旨とする。
【0007】
この発明によれば、姿勢決定部は、車両が走行している湾曲した道路の曲率に係る情報、および湾曲した道路の幅方向における車両の位置に係る情報の少なくとも一方の情報に基づいて、道路の湾曲に沿って曲がる曲線の接線に対して車両の前後方向に延びる左右中心軸のなす角度を決定する。このため、姿勢決定部は、道路の湾曲に沿って曲がる曲線の接線に対して車両の前後方向に延びる左右中心軸のなす角度を決定して、車両が実際に走行する道路の湾曲態様に応じた車両の目標姿勢を決定することができる。そして、姿勢制御部が、車両の姿勢を姿勢決定部が決定した目標姿勢に近づけるため、姿勢決定部が車両の目標姿勢を動的に決定することにより、様々な道路の湾曲態様に応じて、道路の曲線の接線に対して車両の前後方向に延びる左右中心軸のなす角度を制御することができる。よって、湾曲した道路を車両が走行するときの車両の操縦性を向上させることができる。
【0008】
(2)第2の手段は、請求項2に記載の発明すなわち、請求項1に記載の車両姿勢制御装置において、道路の湾曲に沿って曲がる曲線の接線に対して、前記車両の前後方向に延びる左右中心軸が平行となる状態を、「ニュートラル姿勢」とし、前記姿勢決定部は、前記車両の位置が道路の幅方向における所定の基準位置にあるとき、前記ニュートラル姿勢を前記目標姿勢とすることを要旨とする。
【0009】
この発明によれば、道路の幅方向における所定の基準位置に車両が位置するときには、車両の前後方向に延びる左右中心軸が、道路の曲線の接線に対して平行となるように車両の姿勢が制御される。このため、例えば、道路の幅方向における所定の基準位置が道路の中央であれば、道路の中央を走行し続けることが容易となるように車両の操縦性を向上させることができる。
【0010】
(3)第3の手段は、請求項3に記載の発明すなわち、請求項1または2に記載の車両姿勢制御装置において、道路の湾曲に沿って曲がる曲線の接線に対して、前記車両の前方が湾曲した道路の内側を向く状態を、「ヘッドイン姿勢」とし、前記制御部は、前記車両の位置が道路の幅方向において所定の基準位置よりも外側にあるとき、前記ヘッドイン姿勢を前記目標姿勢とすることを要旨とする。
【0011】
この発明によれば、道路の幅方向における所定の基準位置よりも外側に車両が位置するときには、車両の前後方向に延びる左右中心軸が、道路の曲線の接線に対して、湾曲した道路の内側を向くように車両の姿勢が制御される。このため、道路の幅方向において所定の基準位置より外側に位置する車両が、湾曲した道路の内側へ向けて走行することが容易となるように車両の操縦性を向上させることができる。
【0012】
(4)第4の手段は、請求項4に記載の発明すなわち、請求項1〜3のいずれか一項に記載の車両姿勢制御装置において、道路の湾曲に沿って曲がる曲線の接線に対して、前記車両の前方が湾曲した道路の外側を向く状態を、「ヘッドアウト姿勢」とし、前記制御部は、前記車両の位置が道路の幅方向において所定の基準位置よりも内側にあるとき、前記ヘッドアウト姿勢を前記目標姿勢とすることを要旨とする。
【0013】
この発明によれば、道路の幅方向における所定の基準位置よりも内側に車両が位置するときには、車両の前後方向に延びる左右中心軸が、道路の曲線の接線に対して、湾曲した道路の外側を向くように車両の姿勢が制御される。このため、道路の幅方向において所定の基準位置より内側に位置する車両が、湾曲した道路の外側へ向けて走行することが容易となるように車両の操縦性を向上させることができる。
【0014】
(5)第5の手段は、請求項5に記載の発明すなわち、請求項1〜4のいずれか一項に記載の車両姿勢制御装置において、前記車両の前方が、所定の基準方向を向く状態を、「基準姿勢」とし、前記車両の前方が、前記基準姿勢に比べて湾曲した道路の内側を向く状態を、「内向き姿勢」とし、前記姿勢決定部は、道路の曲率が所定の基準曲率であるときに前記基準姿勢を前記目標姿勢とし、道路の曲率が所定の基準曲率よりも小さいときに前記内向き姿勢を前記目標姿勢とすることを要旨とする。
【0015】
この発明によれば、道路の曲率が所定の基準曲率よりも小さいときには、道路の曲率が所定の基準曲率であるときに比べて、車両の前方が、湾曲した道路の内側を向くように車両の姿勢が制御される。このため、所定の基準曲率を有するカーブに比べて緩いカーブを走行する車両が、湾曲した道路の内側へ向けて走行することが容易となるように車両の操縦性を向上させることができる。
【0016】
(6)第6の手段は、請求項6に記載の発明すなわち、請求項5に記載の車両姿勢制御装置において、前記車両の前方が、前記基準姿勢に比べて湾曲した道路の外側を向く状態を、「外向き姿勢」とし、前記姿勢決定部は、道路の曲率が所定の基準曲率よりも大きいときに前記外向き姿勢を前記目標姿勢とすることを要旨とする。
【0017】
この発明によれば、道路の曲率が所定の基準曲率よりも大きいときには、道路の曲率が所定の基準曲率であるときに比べて、車両の前方が、湾曲した道路の外側を向くように車両の姿勢が制御される。このため、所定の基準曲率を有するカーブに比べて急なカーブを走行する車両が、湾曲した道路の外側へ向けて走行することが容易となるように車両の操縦性を向上させることができる。
【0018】
(7)第7の手段は、請求項7に記載の発明すなわち、請求項1〜6のいずれか一項に記載の車両姿勢制御装置において、前記姿勢決定部は、道路の湾曲に沿って曲がる曲線上に位置し、かつ前記車両の前方に位置し、かつ前記車両から所定距離だけ離れた基準点を決定して、前記車両の前後方向に延びる左右中心軸のなす角度を決定するための対象となる前記接線を、道路の湾曲に沿って曲がる曲線と前記基準点において接する線とし、前記姿勢決定部は、前記基準点を決定するための前記所定距離を車速に応じて変更することを要旨とする。
【0019】
この発明によれば、車速に応じて、車両の前後方向に延びる左右中心軸のなす角度を決定するための対象となる上記接線を変更することができる。このため、例えば、運転者が前方を注視する距離である前方注視距離に応じて、上記接線に対して車両の前後方向に延びる左右中心軸のなす角度を制御することができる。
【発明の効果】
【0020】
本発明は、湾曲した道路を車両が走行するときの車両の操縦性の向上に貢献する車両姿勢制御装置を提供する。
【図面の簡単な説明】
【0021】
【図1】本発明の第1実施形態の車両姿勢制御装置について、その全体構成を模式的に示す構成図。
【図2】同実施形態の車両姿勢制御装置により実行される車両姿勢制御処理について、その手順を示すフローチャート。
【図3】同実施形態の車両姿勢制御装置について、車両の位置が道路の幅方向において所定の基準位置にあるときの姿勢制御を示す模式図。
【図4】同実施形態の車両姿勢制御装置について、車両の位置が道路の幅方向において所定の基準位置よりも外側にあるときの姿勢制御を示す模式図。
【図5】同実施形態の車両姿勢制御装置について、車両の位置が道路の幅方向において所定の基準位置よりも内側にあるときの姿勢制御を示す模式図。
【図6】本発明の第2実施形態の車両姿勢制御装置により実行される車両姿勢制御処理について、その手順を示すフローチャート。
【図7】同実施形態の車両姿勢制御装置について、道路の曲率が所定の基準曲率であるときの姿勢制御を示す模式図。
【図8】同実施形態の車両姿勢制御装置について、道路の曲率が所定の基準曲率よりも小さいときの姿勢制御を示す模式図。
【図9】同実施形態の車両姿勢制御装置について、道路の曲率が所定の基準曲率よりも大きいときの姿勢制御を示す模式図。
【発明を実施するための形態】
【0022】
(第1実施形態)
図1〜図5を参照して、本発明の第1実施形態について説明する。なお、図中の矢印Xは、車両1の前方および後方を含む前後方向を示す。また、図中の矢印Yは、車両1の左方および右方を含む左右方向を示す。前後方向と左右方向は互いに直交する直線方向である。前後方向および左右方向に直交する直線方向を、上方および下方を含む上下方向とする。前後方向、左右方向、および上下方向は、車両1に固定された座標系の方向を示している。
【0023】
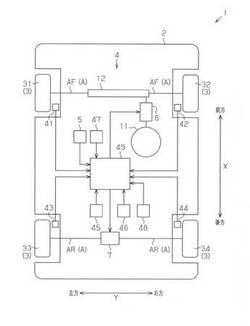
図1に、車体2と車輪3と車両姿勢制御装置4とを有する車両1の全体構成を示す。
前側の車輪3である前輪31,32は、前側の車軸Aである前軸AFを回転中心軸として回転する。左前輪31は、車体2の左前側部位に位置する。右前輪32は、車体2の右前側部位に位置する。
【0024】
後側の車輪3である後輪33,34は、後側の車軸Aである後軸ARを回転中心軸として回転する。左後輪33は、車体2の左後側部位に位置する。右後輪34は、車体2の右後側部位に位置する。
【0025】
ステアリング装置12は、前輪31,32と、前輪31,32の舵角を制御するための操舵ハンドル11とを接続する。前輪31,32の舵角は、操舵ハンドル11が操作されることによって変化する。
【0026】
車両姿勢制御装置4は、車体すべり角推定装置5と、車輪速センサ41〜44と、加速度センサ45と、ヨーレートセンサ46と、道路情報取得部47と、メモリ48と、演算装置49と、前輪制御装置6と、後輪制御装置7とを有する。なお、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7は「姿勢制御部」に相当する。また、演算装置49は「姿勢決定部」に相当する。
【0027】
車体すべり角推定装置5は、車体2の横すべり角を推定する。車体2の横すべり角は、例えば、車両1のヨーレートおよび加速度と、路面の摩擦係数とに基づいて算出される。なお、路面の摩擦係数はその推定精度が低ければ、横すべり角の推定精度が低くなるため、路面の摩擦係数に代えて車輪3に作用する横力に基づいて横すべり角が算出されることが好ましい。車輪3に作用する横力はタイヤ横力センサ(図示略)が検出する。
【0028】
車輪速センサ41は、左前輪31の車輪速を検出する。車輪速センサ42は、右前輪32の車輪速を検出する。車輪速センサ43は、左後輪33の車輪速を検出する。車輪速センサ44は、右後輪34の車輪速を検出する。
【0029】
加速度センサ45は、前後方向および左右方向および上下方向の加速度を検出する。
ヨーレートセンサ46は、上下方向を回転の中心とする車両1の回転の角速度であるヨーレートを検出する。
【0030】
道路情報取得部47は、道路の情報として、車両1が走行する道路の形状の情報であって、車両1の前方の道路の形状の情報を取得する。道路情報取得部47は、例えば、車載カメラ、GPS(Global Positioning System)を用いるGPS受信機、またはこれらの組合せ等により構成される。
【0031】
メモリ48は、演算装置49が実行するプログラムと、同プログラムに用いる情報を記憶する。メモリ48は、プログラムに用いる情報として、車両1の基礎目標姿勢に係る情報を記憶している。本実施形態においては、基礎目標姿勢は、道路の湾曲に沿って曲がる曲線の接線に対して、車両1の前後方向に延びる左右中心軸が平行となる状態である。以下、この状態を「ニュートラル姿勢」という。
【0032】
演算装置49は、ECU(Electronic Control Unit)により構成される集積回路である。演算装置49は、メモリ48に記憶されているプログラムに基づいて車両姿勢制御処理を実行する。
【0033】
車両姿勢制御処理において、演算装置49は、道路情報取得部47により取得した車両1の前方の道路の形状の情報に基づいて、湾曲した道路の幅方向における車両1の位置に係る情報、および車両1が走行している湾曲した道路の曲率に係る情報を取得する。すなわち、演算装置49は、例えば、車載カメラにより撮影された画像データや、車両1の位置情報を含む地図データに基づいて、道路の幅方向における車両1の位置、および道路の曲率を算出する。
【0034】
また、車両姿勢制御処理において、演算装置49は、道路の幅方向における車両1の位置に基づいて、車両1の姿勢を所定の目標姿勢に近づけるための制御量を算出する。演算装置49は算出した制御量を前輪制御装置6および後輪制御装置7の少なくとも一方に出力する。前輪制御装置6および後輪制御装置7は、演算装置49が算出した制御量に基づいて動作する。
【0035】
前輪制御装置6は、操舵ハンドル11の舵角と連動せずに前輪31,32の舵角を制御することが可能なアクティブステアリング装置である。前輪制御装置6は、前輪31,32を制御して車両1の姿勢を制御する。上下方向を回転の中心とする車両1について、その回転の中心の位置(以下、「ヨー回転中心位置」)が、後軸ARよりも前軸AFに近い位置にあるときは、前輪31,32の横すべり角は、後輪33,34の横すべり角よりも小さく、前輪31,32は後輪33,34に比べて路面をグリップしている。よって、このとき、前輪制御装置6は、前輪31,32を制御することによって、車両1の姿勢を効果的に制御する。
【0036】
後輪制御装置7は、駆動輪である後輪33,34について、左後輪33の駆動力と右後輪34の駆動力の配分比率を制御することが可能な左右駆動力配分装置である。後輪制御装置7は、後輪33,34を制御して車両1の姿勢を制御する。ヨー回転中心位置が、前軸AFよりも後軸ARに近い位置にあるときは、後輪33,34の横すべり角は、前輪31,32の横すべり角よりも小さく、後輪33,34は前輪31,32に比べて路面をグリップしている。よって、このとき、後輪制御装置7は、後輪33,34を制御することによって、車両1の姿勢を効果的に制御する。
【0037】
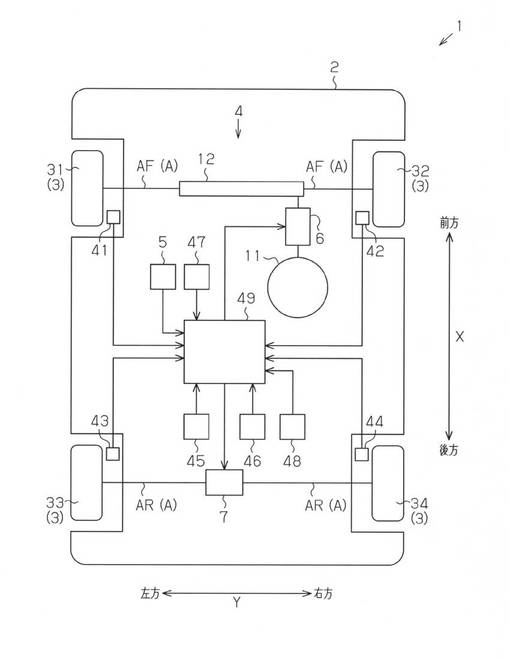
図2を参照して、車両姿勢制御処理について説明する。図2に示す一連の処理は、ステップS11およびS15を除いて、演算装置49が行う。
ステップS11では、車体すべり角推定装置5が車体2の横すべり角を推定する。横すべり角の推定結果は車体すべり角推定装置5から演算装置49に入力される。演算装置49は、横すべり角に基づいて走行中の車両1の姿勢を検出する。
【0038】
ステップS12では、検出された車両1の姿勢と、メモリ48に記憶されている基礎目標姿勢とに基づいて、車両1の姿勢を基礎目標姿勢に近づけるための制御量を算出する。制御量は、前輪制御装置6による前輪31,32の制御量、後輪制御装置7による後輪33,34の制御量に相当する。前輪31,32の制御量は、前輪31,32の舵角の変化量に相当する。また、後輪33,34の制御量は、左後輪33の駆動力と右後輪34の駆動力の差に相当する。
【0039】
ステップS12において、演算装置49は、制御量を算出するために、道路の湾曲に沿って曲がる曲線上に位置し、かつ車両1の前方に位置し、かつ車両1から所定距離だけ離れた基準点を決定する。そして、この基準点で道路の湾曲に沿って曲がる曲線と接する線を基準接線として、演算装置49は、基準接線に対して車両1の前後方向に延びる左右中心軸を平行とするための前輪31,32の制御量および後輪33,34の制御量を算出する。このようにして算出された前輪31,32の制御量および後輪33,34の制御量が、車両1の姿勢を基礎目標姿勢に近づけるための制御量に相当する。なお、演算装置49は、基準点を決定するときに、基準点が決定される上記所定距離を車速に応じて変更する。具体的には、演算装置49は、車速が大きいほど上記所定距離を長くして、基準点を車両1の遠くに位置する点とし、車速が小さいほど上記所定距離を短くして、基準点を車両1の近くに位置する点とする。車速は、車輪速センサ41〜44による車輪速の検出結果に基づいて算出する。
【0040】
ステップS13では、道路情報取得部47を用いて、道路の幅方向における車両1の位置を検出する。
ステップS14では、ステップS13で検出した道路の幅方向における車両1の位置が、所定の基準位置であるか否かを判定する。基準位置は、例えば、道路の幅方向における中央である。ステップS14において、車両1の位置が基準位置であると判定したとき、ステップS15の処理に進む。ステップS14において、車両1の位置が基準位置でないと判定したとき、ステップS16の処理に進む。
【0041】
ステップS15では、演算装置49が算出した制御量に基づいて、前輪制御装置6および後輪制御装置7の少なくとも一方が、車両1の姿勢を制御する。車両1の位置が基準位置であるとステップS14で判定したときは、前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1の姿勢を基礎目標姿勢であるニュートラル姿勢に近づけるように車両1の姿勢を制御する。
【0042】
ステップS16では、ステップS13で検出した道路の幅方向における車両1の位置が、所定の基準位置よりも外側であるか内側であるかを判定する。ステップS16において、車両1の位置が基準位置よりも外側であると判定したとき、ステップS17の処理に進む。ステップS16において、車両1の位置が内側であると判定したとき、ステップS18の処理に進む。
【0043】
ステップS17では、ニュートラル姿勢に比べて車両1が内側を向くように、ステップS12で算出した制御量を補正する。すなわち、車両1の目標姿勢を、道路の湾曲に沿って曲がる曲線の接線に対して、車両1の前方が湾曲した道路の内側を向く状態とする。以下、この状態を「ヘッドイン姿勢」という。制御量を補正するための補正量は、加速度センサ45を用いて検出した加速度、またはヨーレートセンサ46を用いて検出したヨーレート等に基づいて算出する。
【0044】
ステップS17において、車両1の目標姿勢を変更した後は、ステップS15の処理に進む。すなわち、ステップS17を経たステップS15では、ステップS17で補正された制御量に基づいて、前輪制御装置6および後輪制御装置7の少なくとも一方が、車両1の姿勢を制御する。車両1の位置が基準位置よりも外側であるとステップS16で判定したときは、前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1の姿勢を目標姿勢であるヘッドイン姿勢に近づけるように車両1の姿勢を制御する。
【0045】
ステップS18では、ニュートラル姿勢に比べて車両1が外側を向くように、ステップS12で算出した制御量を補正する。すなわち、車両1の目標姿勢を、道路の湾曲に沿って曲がる曲線の接線に対して、車両1の前方が湾曲した道路の外側を向く状態とする。以下、この状態を「ヘッドアウト姿勢」という。制御量を補正するための補正量は、加速度センサ45を用いて検出した加速度、またはヨーレートセンサ46を用いて検出したヨーレート等に基づいて算出する。
【0046】
ステップS18において、車両1の目標姿勢を変更した後は、ステップS15の処理に進む。すなわち、ステップS18を経たステップS15では、ステップS18で補正された制御量に基づいて、前輪制御装置6および後輪制御装置7の少なくとも一方が、車両1の姿勢を制御する。車両1の位置が基準位置よりも内側であるとステップS16で判定したときは、前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1の姿勢を目標姿勢であるヘッドアウト姿勢に近づけるように車両1の姿勢を制御する。
【0047】
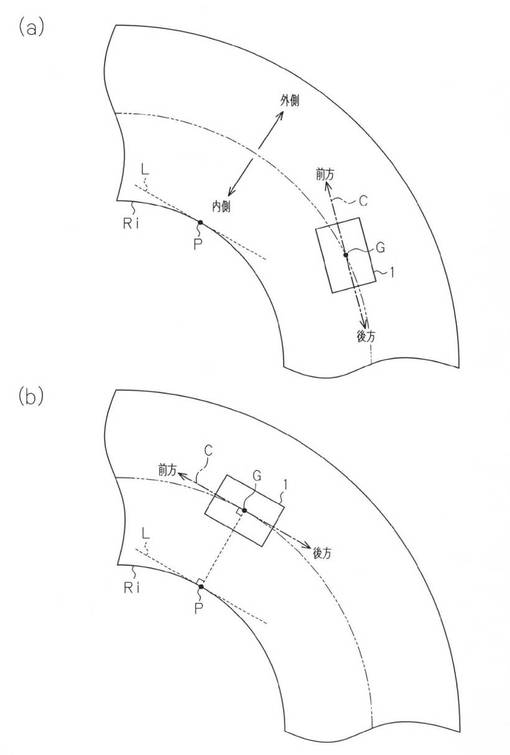
図3〜5を参照して、車両姿勢制御装置4の作用について説明する。
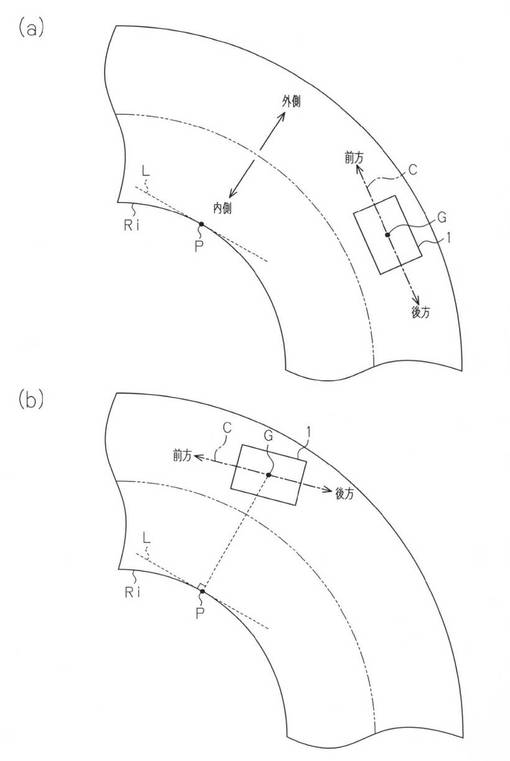
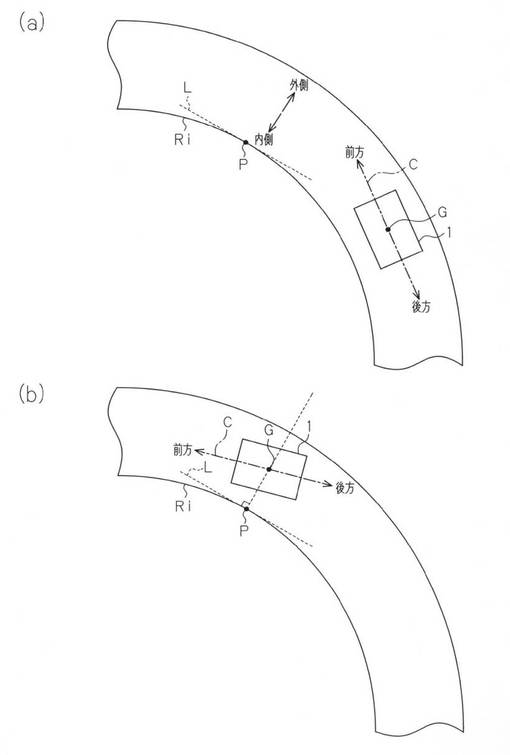
図中の一点鎖線は、車両1の前後方向に延びる左右中心軸を示している。また、図中の二点鎖線は、道路の幅方向における所定の基準位置を示している。道路の幅方向は、車両1の進行方向に交差する方向である。
【0048】
また、図中の点Pは、道路の湾曲に沿って曲がる曲線Ri上に位置し、かつ車両1の前方に位置し、かつ車両1から所定距離だけ離れた基準点を示している。車両1の前後方向に延びる左右中心軸のなす角度を決定するための対象となる接線Lは、道路の湾曲に沿って曲がる曲線Riと基準点において接する線である。曲線Riは湾曲した道路の内側の外形である。
【0049】
図3(a)は、道路の幅方向における基準位置を走行している車両1を示している。道路の幅方向における基準位置を走行している車両1の目標姿勢はニュートラル姿勢に設定される。このため、図3(b)に示されるように、車両1の姿勢がニュートラル姿勢に近づくように制御されて、接線Lに対して車両1の前後方向に延びる左右中心軸が平行となる。
【0050】
図4(a)は、道路の幅方向における基準位置よりも外側を走行している車両1を示している。すなわち、車両1の位置は道路の幅方向における基準位置よりも外側にある。道路の幅方向における基準位置よりも外側を走行している車両1の目標姿勢はヘッドイン姿勢に設定される。このため、図4(b)に示されるように、車両1の姿勢がヘッドイン姿勢に近づくように制御されて、車両1の前方が、接線Lの方向、すなわち湾曲した道路の内側を向く。
【0051】
図5(a)は、道路の幅方向における基準位置よりも内側を走行している車両1を示している。すなわち、車両1の位置は道路の幅方向における基準位置よりも内側にある。道路の幅方向における基準位置よりも内側を走行している車両1の目標姿勢はヘッドアウト姿勢に設定される。このため、図5(b)に示されるように、車両1の姿勢がヘッドアウト姿勢に近づくように制御されて、車両1の前方が、接線Lの反対側の方向、すなわち湾曲した道路の外側を向く。
【0052】
(実施形態の効果)
本実施形態の車両姿勢制御装置4は、以下の効果を奏する。
(1)演算装置49が、車両1が走行している湾曲した道路の曲率に係る情報、および湾曲した道路の幅方向における車両1の位置に係る情報の少なくとも一方の情報に基づいて、道路の湾曲に沿って曲がる曲線Riの接線Lに対して車両1の前後方向に延びる左右中心軸のなす角度を決定する。このため、演算装置49は、道路の湾曲に沿って曲がる曲線Riの接線Lに対して車両1の前後方向に延びる左右中心軸のなす角度を決定して、車両1が実際に走行する道路の湾曲態様に応じた車両1の目標姿勢を決定することができる。そして、前輪制御装置6または後輪制御装置7が、車両1の姿勢を演算装置49が決定した目標姿勢に近づけるため、演算装置49が車両1の目標姿勢を動的に決定することにより、様々な道路の湾曲態様に応じて、道路の曲線Riの接線Lに対して車両1の前後方向に延びる左右中心軸のなす角度を制御することができる。よって、湾曲した道路を車両1が走行するときの車両1の操縦性を向上させることができる。
【0053】
(2)演算装置49は、車両1の位置が道路の幅方向における所定の基準位置にあるとき、ニュートラル姿勢を車両1の目標姿勢とする。このため、道路の幅方向における所定の基準位置に車両1が位置するときには、車両1の前後方向に延びる左右中心軸が、道路の曲線Riの接線Lに対して平行となるように車両1の姿勢が制御される。このため、道路の幅方向における所定の基準位置が道路の中央であれば、道路の中央を走行し続けることが容易となるように車両1の操縦性を向上させることができる。
【0054】
(3)演算装置49は、車両1の位置が道路の幅方向において所定の基準位置よりも外側にあるとき、ヘッドイン姿勢を車両1の目標姿勢とする。このため、道路の幅方向における所定の基準位置よりも外側に車両1が位置するときには、車両1の前後方向に延びる左右中心軸が、道路の曲線Riの接線Lに対して、湾曲した道路の内側を向くように車両1の姿勢が制御される。このため、道路の幅方向において所定の基準位置より外側に位置する車両1が、湾曲した道路の内側へ向けて走行することが容易となるように車両1の操縦性を向上させることができる。
【0055】
(4)演算装置49は、車両1の位置が道路の幅方向において所定の基準位置よりも内側にあるとき、ヘッドアウト姿勢を車両1の目標姿勢とする。このため、道路の幅方向における所定の基準位置よりも内側に車両1が位置するときには、車両1の前後方向に延びる左右中心軸が、道路の曲線Riの接線Lに対して、湾曲した道路の外側を向くように車両1の姿勢が制御される。このため、道路の幅方向において所定の基準位置より内側に位置する車両1が、湾曲した道路の外側へ向けて走行することが容易となるように車両1の操縦性を向上させることができる。
【0056】
(5)演算装置49は、道路の湾曲に沿って曲がる曲線Ri上に位置し、かつ車両1の前方に位置し、かつ車両1から所定距離だけ離れた基準点を決定して、車両1の前後方向に延びる左右中心軸のなす角度を決定するための対象となる接線Lを、道路の湾曲に沿って曲がる曲線Riと基準点において接する線とし、演算装置49は、基準点を決定するための上記所定距離を車速に応じて変更する。このため、車速に応じて、車両1の前後方向に延びる左右中心軸のなす角度を決定するための対象となる上記接線Lを変更することができる。このため、例えば、運転者が前方を注視する距離である前方注視距離に応じて、上記接線Lに対して車両1の前後方向に延びる左右中心軸のなす角度を制御することができる。
【0057】
(第2実施形態)
図6〜図9を参照して、本発明の第2実施形態について説明する。本実施形態では、第1実施形態の車両姿勢制御処理を変更したものである。以下では第1実施形態の車両姿勢制御装置4と異なる部分について詳細に説明するとともに、第1実施形態と共通する構成については同一の符号を付してその説明の一部または全部を省略する。
【0058】
本実施形態の車両姿勢制御処理において、演算装置49は、車両1が走行している湾曲した道路の曲率に基づいて、車両1の姿勢を所定の目標姿勢に近づけるための制御量を算出する。
【0059】
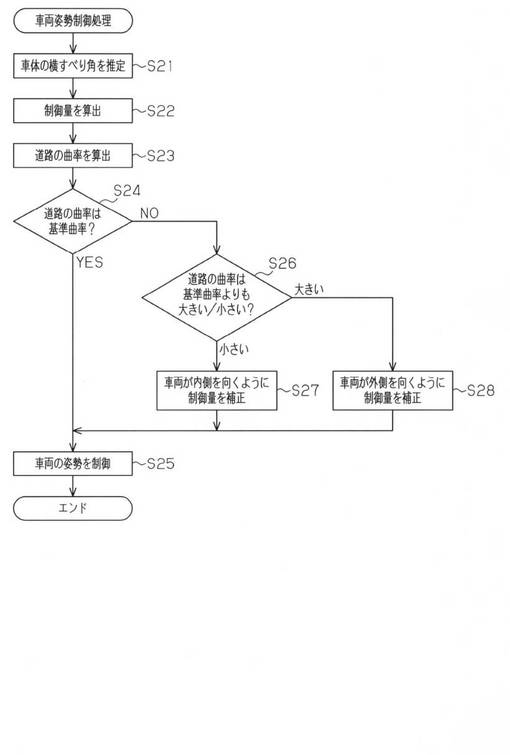
図6を参照して、車両姿勢制御処理について説明する。図6に示す一連の処理は、ステップS21およびS25を除いて、演算装置49が行う。
ステップS21では、車体すべり角推定装置5が車体2の横すべり角を推定する。横すべり角の推定結果は車体すべり角推定装置5から演算装置49に入力される。演算装置49は、横すべり角に基づいて走行中の車両1の姿勢を検出する。
【0060】
ステップS22では、第1実施形態のステップS12と同様にして、検出された車両1の姿勢と、メモリ48に記憶されている基礎目標姿勢とに基づいて、車両1の姿勢を基礎目標姿勢に近づけるための制御量を算出する。
【0061】
ステップS23では、道路情報取得部47を用いて、車両1が走行している湾曲した道路の曲率を算出する。
ステップS24では、ステップS23で算出した道路の曲率が、所定の基準曲率であるか否かを判定する。ステップS24において、道路の曲率が基準曲率であると判定したとき、ステップS25の処理に進む。ステップS24において、道路の曲率が基準曲率でないと判定したとき、ステップS26の処理に進む。
【0062】
ステップS25では、演算装置49が算出した制御量に基づいて、前輪制御装置6および後輪制御装置7の少なくとも一方が、車両1の姿勢を制御する。道路の曲率が基準曲率であるとステップS24で判定したときは、前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1の姿勢を基礎目標姿勢であるニュートラル姿勢に近づけるように車両1の姿勢を制御する。
【0063】
ステップS26では、ステップS23で算出した道路の曲率が、所定の基準曲率よりも大きいか小さいかを判定する。ステップS26において、道路の曲率が基準曲率よりも小さいと判定したとき、ステップS27の処理に進む。ステップS26において、道路の曲率が基準曲率よりも大きいと判定したとき、ステップS28の処理に進む。
【0064】
ステップS27では、ニュートラル姿勢に比べて車両1が内側を向くように、ステップS22で算出した制御量を補正する。すなわち、車両1の前方が所定の基準方向を向く状態であるニュートラル姿勢を「基準姿勢」として、車両1の目標姿勢を、車両1の前方が、基準姿勢に比べて湾曲した道路の内側を向く状態とする。以下、この状態を「内向き姿勢」という。制御量を補正するための補正量は、加速度センサ45を用いて検出した加速度、またはヨーレートセンサ46を用いて検出したヨーレート等に基づいて算出する。
【0065】
ステップS27において、車両1の目標姿勢を変更した後は、ステップS25の処理に進む。すなわち、ステップS27を経たステップS25では、ステップS27で補正された制御量に基づいて、前輪制御装置6および後輪制御装置7の少なくとも一方が、車両1の姿勢を制御する。道路の曲率が基準曲率よりも小さいとステップS26で判定したときは、前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1の姿勢を目標姿勢である内向き姿勢に近づけるように車両1の姿勢を制御する。
【0066】
ステップS28では、ニュートラル姿勢に比べて車両1が外側を向くように、ステップS22で算出した制御量を補正する。すなわち、車両1の前方が所定の基準方向を向く状態であるニュートラル姿勢を「基準姿勢」として、車両1の目標姿勢を、車両1の前方が、基準姿勢に比べて湾曲した道路の外側を向く状態とする。以下、この状態を「外向き姿勢」という。制御量を補正するための補正量は、加速度センサ45を用いて検出した加速度、またはヨーレートセンサ46を用いて検出したヨーレート等に基づいて算出する。
【0067】
ステップS28において、車両1の目標姿勢を変更した後は、ステップS25の処理に進む。すなわち、ステップS28を経たステップS25では、ステップS28で補正された制御量に基づいて、前輪制御装置6および後輪制御装置7の少なくとも一方が、車両1の姿勢を制御する。道路の曲率が基準曲率よりも大きいとステップS26で判定したときは、前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1の姿勢を目標姿勢である外向き姿勢に近づけるように車両1の姿勢を制御する。
【0068】
図7〜9を参照して、車両姿勢制御装置4の作用について説明する。
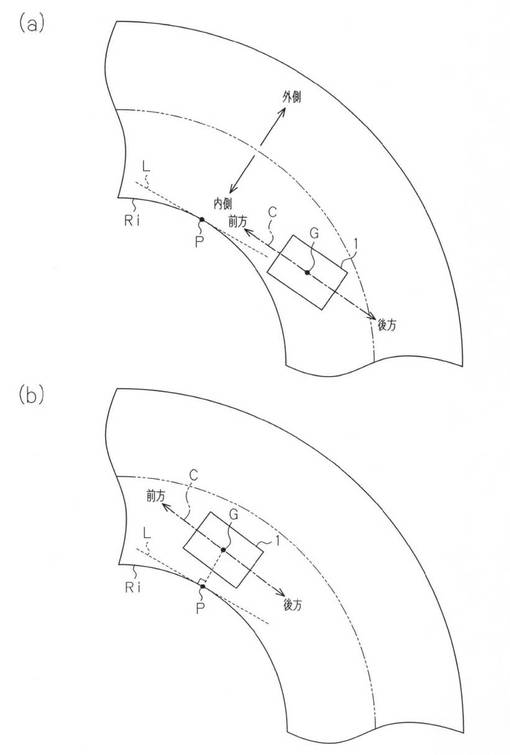
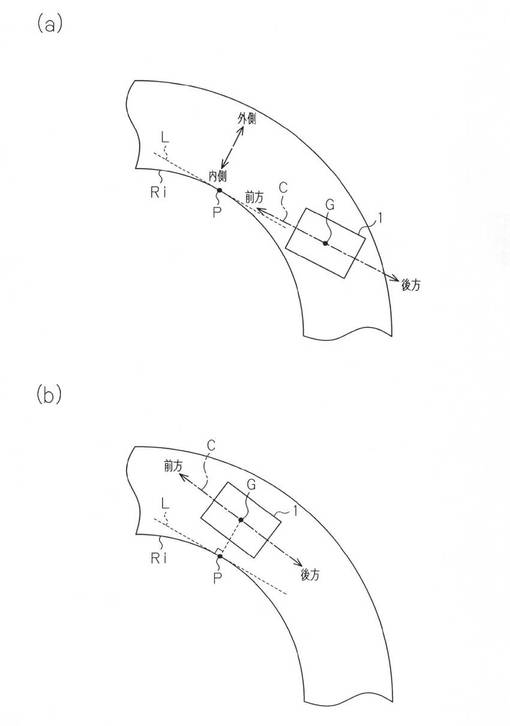
図7(a)は、基準曲率を有する道路を走行している車両1を示している。基準曲率を有する道路を走行している車両1の目標姿勢は、基準姿勢であるニュートラル姿勢に設定される。このため、図7(b)に示されるように、車両1の姿勢がニュートラル姿勢に近づくように制御されて、接線Lに対して車両1の前後方向に延びる左右中心軸が平行となる。
【0069】
図8(a)は、基準曲率よりも小さい曲率を有する道路を走行している車両1を示している。すなわち、湾曲した道路の内側の外形である曲線Riについて、図8の曲線Riの半径は図7の曲線Riに比べて大きい。基準曲率よりも小さい曲率を有する道路を走行している車両1の目標姿勢は内向き姿勢に設定される。このため、図8(b)に示されるように、車両1の姿勢が内向き姿勢に近づくように制御されて、車両1の前方が、接線Lの方向、すなわち湾曲した道路の内側を向く。
【0070】
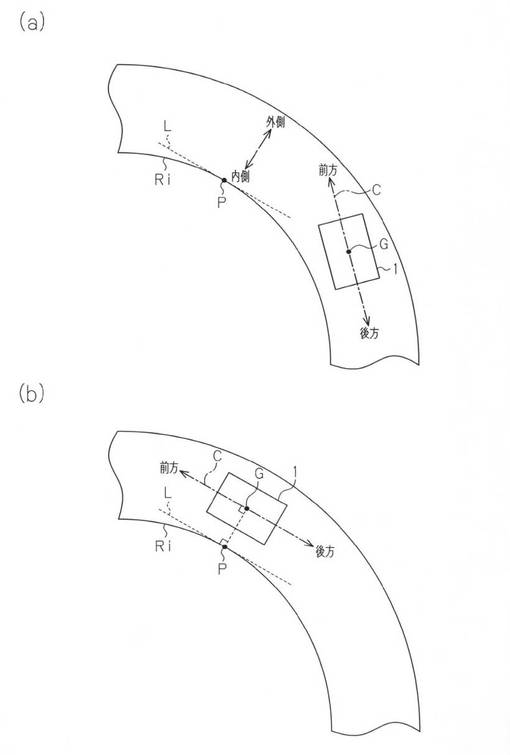
図9(a)は、基準曲率よりも大きい曲率を有する道路を走行している車両1を示している。すなわち、湾曲した道路の内側の外形である曲線Riについて、図9の曲線Riの半径は図7の曲線Riに比べて小さい。基準曲率よりも大きい曲率を有する道路を走行している車両1の目標姿勢は外向き姿勢に設定される。このため、図9(b)に示されるように、車両1の姿勢が外向き姿勢に近づくように制御されて、車両1の前方が、接線Lの反対側の方向、すなわち湾曲した道路の外側を向く。
【0071】
(実施形態の効果)
本実施形態の車両姿勢制御装置4は、上記(1)〜(4)に代え以下の効果を奏する。
(6)演算装置49が、車両1が走行している湾曲した道路の曲率に係る情報の情報に基づいて、道路の湾曲に沿って曲がる曲線Riの接線Lに対して車両1の前後方向に延びる左右中心軸のなす角度を決定する。このため、演算装置49は、道路の湾曲に沿って曲がる曲線Riの接線Lに対して車両1の前後方向に延びる左右中心軸のなす角度を決定して、車両1が実際に走行する道路の湾曲態様に応じた車両1の目標姿勢を決定することができる。そして、前輪制御装置6または後輪制御装置7が、車両1の姿勢を演算装置49が決定した目標姿勢に近づけるため、演算装置49が車両1の目標姿勢を動的に決定することにより、様々な道路の湾曲態様に応じて、道路の曲線Riの接線Lに対して車両1の前後方向に延びる左右中心軸のなす角度を制御することができる。よって、湾曲した道路を車両1が走行するときの車両1の操縦性を向上させることができる。
【0072】
(7)演算装置49は、道路の曲率が所定の基準曲率であるときに基準姿勢を目標姿勢とし、道路の曲率が所定の基準曲率よりも小さいときに内向き姿勢を目標姿勢とする。このため、道路の曲率が所定の基準曲率よりも小さいときには、道路の曲率が所定の基準曲率であるときに比べて、車両1の前方が、湾曲した道路の内側を向くように車両1の姿勢が制御される。このため、所定の基準曲率を有するカーブに比べて緩いカーブを走行する車両が、湾曲した道路の内側へ向けて走行することが容易となるように車両1の操縦性を向上させることができる。
【0073】
(8)演算装置49は、道路の曲率が所定の基準曲率よりも大きいときに外向き姿勢を目標姿勢とする。このため、道路の曲率が所定の基準曲率よりも大きいときには、道路の曲率が所定の基準曲率であるときに比べて、車両1の前方が、湾曲した道路の外側を向くように車両1の姿勢が制御される。このため、所定の基準曲率を有するカーブに比べて急なカーブを走行する車両1が、湾曲した道路の外側へ向けて走行することが容易となるように車両1の操縦性を向上させることができる。
【0074】
(その他の実施形態)
本発明は、第1および第2実施形態以外の実施形態を含む。以下、本発明のその他の実施形態としての上記実施形態の変形例を示す。なお、以下の各変形例は、互いに組み合わせることもできる。
【0075】
・第1および第2実施形態を組み合わせることもできる。すなわち、演算装置49が、車両1が走行している湾曲した道路の曲率に係る情報、および湾曲した道路の幅方向における車両1の位置に係る情報の双方の情報に基づいて、道路の湾曲に沿って曲がる曲線の接線に対して車両1の前後方向に延びる左右中心軸のなす角度を決定することもできる。
【0076】
・上記実施形態(図1)の前輪制御装置6は、アクティブステアリング装置である。一方、変形例において、前輪制御装置6は、独立駆動装置または左右駆動力配分装置である。すなわち、前輪制御装置6は、前輪31,32の舵角を制御する差動機構装置またはステアバイワイヤ装置等のアクティブステアリング装置に限定されない。
【0077】
・上記実施形態(図1)の後輪制御装置7は、左右駆動力配分装置である。一方、変形例において、後輪制御装置7は、独立駆動装置、または後輪33,34の舵角を制御することが可能な後輪ステアリング装置である。すなわち、後輪制御装置7は、後輪33,34の駆動力の比率を制御する駆動力配分装置に限定されない。
【符号の説明】
【0078】
1…車両、2…車体、3…車輪、4…車両姿勢制御装置、5…車体すべり角推定装置、6…前輪制御装置(姿勢制御部)、7…後輪制御装置(姿勢制御部)、11…操舵ハンドル、12…パワーステアリング装置、31…左前輪、32…右前輪、33…左後輪、34…右後輪、41〜44…車輪速センサ、45…加速度センサ、46…ヨーレートセンサ、47…道路情報取得部、48…メモリ、49…演算装置(姿勢決定部)、A…車軸、AF…前軸)、AR…後軸。
【技術分野】
【0001】
本発明は、車両の姿勢を制御する姿勢制御部と、車両の目標姿勢を決定する姿勢決定部とを備え、姿勢制御部が、車両の姿勢を、姿勢決定部により決定された目標姿勢に近づける車両姿勢制御装置に関する。
【背景技術】
【0002】
特許文献1の車両の姿勢制御装置は、車両の現在の走行位置を基点とした所定時間後の走行位置を演算する走行位置推定手段と、現在の走行位置から走行位置推定手段により推定された所定時間後の走行位置への方向に中心軸を設定し、この中心軸周りに車体を回転する姿勢最適化制御を実行する姿勢調節手段とを有する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−123610号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般的に、車両姿勢制御装置は、車両の操縦性が向上するために、車体すべり角を0に近づけることにより、車両の進行方向と車両の前方とが一致するように車両の姿勢を制御する。しかし、車両が走行する道路の湾曲は様々な態様であるため、車両の進行方向と車両の前方とを一致させることが必ずしも操縦性を向上させることにはならない。よって、特許文献1の姿勢制御装置は、湾曲した道路を車両が走行するときの車両の操縦性を向上させることができないおそれがある。
【0005】
本発明は、上記課題を解決するため、湾曲した道路を車両が走行するときの車両の操縦性の向上に貢献する車両姿勢制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)第1の手段は、請求項1に記載の発明すなわち、車両の姿勢を制御する姿勢制御部と、前記車両の目標姿勢を決定する姿勢決定部とを備え、前記姿勢制御部が、前記車両の姿勢を、前記姿勢決定部により決定された前記目標姿勢に近づける車両姿勢制御装置において、前記姿勢決定部が、前記車両が走行している湾曲した道路の曲率に係る情報、および湾曲した道路の幅方向における前記車両の位置に係る情報の少なくとも一方の情報に基づいて、道路の湾曲に沿って曲がる曲線の接線に対して前記車両の前後方向に延びる左右中心軸のなす角度を決定することを要旨とする。
【0007】
この発明によれば、姿勢決定部は、車両が走行している湾曲した道路の曲率に係る情報、および湾曲した道路の幅方向における車両の位置に係る情報の少なくとも一方の情報に基づいて、道路の湾曲に沿って曲がる曲線の接線に対して車両の前後方向に延びる左右中心軸のなす角度を決定する。このため、姿勢決定部は、道路の湾曲に沿って曲がる曲線の接線に対して車両の前後方向に延びる左右中心軸のなす角度を決定して、車両が実際に走行する道路の湾曲態様に応じた車両の目標姿勢を決定することができる。そして、姿勢制御部が、車両の姿勢を姿勢決定部が決定した目標姿勢に近づけるため、姿勢決定部が車両の目標姿勢を動的に決定することにより、様々な道路の湾曲態様に応じて、道路の曲線の接線に対して車両の前後方向に延びる左右中心軸のなす角度を制御することができる。よって、湾曲した道路を車両が走行するときの車両の操縦性を向上させることができる。
【0008】
(2)第2の手段は、請求項2に記載の発明すなわち、請求項1に記載の車両姿勢制御装置において、道路の湾曲に沿って曲がる曲線の接線に対して、前記車両の前後方向に延びる左右中心軸が平行となる状態を、「ニュートラル姿勢」とし、前記姿勢決定部は、前記車両の位置が道路の幅方向における所定の基準位置にあるとき、前記ニュートラル姿勢を前記目標姿勢とすることを要旨とする。
【0009】
この発明によれば、道路の幅方向における所定の基準位置に車両が位置するときには、車両の前後方向に延びる左右中心軸が、道路の曲線の接線に対して平行となるように車両の姿勢が制御される。このため、例えば、道路の幅方向における所定の基準位置が道路の中央であれば、道路の中央を走行し続けることが容易となるように車両の操縦性を向上させることができる。
【0010】
(3)第3の手段は、請求項3に記載の発明すなわち、請求項1または2に記載の車両姿勢制御装置において、道路の湾曲に沿って曲がる曲線の接線に対して、前記車両の前方が湾曲した道路の内側を向く状態を、「ヘッドイン姿勢」とし、前記制御部は、前記車両の位置が道路の幅方向において所定の基準位置よりも外側にあるとき、前記ヘッドイン姿勢を前記目標姿勢とすることを要旨とする。
【0011】
この発明によれば、道路の幅方向における所定の基準位置よりも外側に車両が位置するときには、車両の前後方向に延びる左右中心軸が、道路の曲線の接線に対して、湾曲した道路の内側を向くように車両の姿勢が制御される。このため、道路の幅方向において所定の基準位置より外側に位置する車両が、湾曲した道路の内側へ向けて走行することが容易となるように車両の操縦性を向上させることができる。
【0012】
(4)第4の手段は、請求項4に記載の発明すなわち、請求項1〜3のいずれか一項に記載の車両姿勢制御装置において、道路の湾曲に沿って曲がる曲線の接線に対して、前記車両の前方が湾曲した道路の外側を向く状態を、「ヘッドアウト姿勢」とし、前記制御部は、前記車両の位置が道路の幅方向において所定の基準位置よりも内側にあるとき、前記ヘッドアウト姿勢を前記目標姿勢とすることを要旨とする。
【0013】
この発明によれば、道路の幅方向における所定の基準位置よりも内側に車両が位置するときには、車両の前後方向に延びる左右中心軸が、道路の曲線の接線に対して、湾曲した道路の外側を向くように車両の姿勢が制御される。このため、道路の幅方向において所定の基準位置より内側に位置する車両が、湾曲した道路の外側へ向けて走行することが容易となるように車両の操縦性を向上させることができる。
【0014】
(5)第5の手段は、請求項5に記載の発明すなわち、請求項1〜4のいずれか一項に記載の車両姿勢制御装置において、前記車両の前方が、所定の基準方向を向く状態を、「基準姿勢」とし、前記車両の前方が、前記基準姿勢に比べて湾曲した道路の内側を向く状態を、「内向き姿勢」とし、前記姿勢決定部は、道路の曲率が所定の基準曲率であるときに前記基準姿勢を前記目標姿勢とし、道路の曲率が所定の基準曲率よりも小さいときに前記内向き姿勢を前記目標姿勢とすることを要旨とする。
【0015】
この発明によれば、道路の曲率が所定の基準曲率よりも小さいときには、道路の曲率が所定の基準曲率であるときに比べて、車両の前方が、湾曲した道路の内側を向くように車両の姿勢が制御される。このため、所定の基準曲率を有するカーブに比べて緩いカーブを走行する車両が、湾曲した道路の内側へ向けて走行することが容易となるように車両の操縦性を向上させることができる。
【0016】
(6)第6の手段は、請求項6に記載の発明すなわち、請求項5に記載の車両姿勢制御装置において、前記車両の前方が、前記基準姿勢に比べて湾曲した道路の外側を向く状態を、「外向き姿勢」とし、前記姿勢決定部は、道路の曲率が所定の基準曲率よりも大きいときに前記外向き姿勢を前記目標姿勢とすることを要旨とする。
【0017】
この発明によれば、道路の曲率が所定の基準曲率よりも大きいときには、道路の曲率が所定の基準曲率であるときに比べて、車両の前方が、湾曲した道路の外側を向くように車両の姿勢が制御される。このため、所定の基準曲率を有するカーブに比べて急なカーブを走行する車両が、湾曲した道路の外側へ向けて走行することが容易となるように車両の操縦性を向上させることができる。
【0018】
(7)第7の手段は、請求項7に記載の発明すなわち、請求項1〜6のいずれか一項に記載の車両姿勢制御装置において、前記姿勢決定部は、道路の湾曲に沿って曲がる曲線上に位置し、かつ前記車両の前方に位置し、かつ前記車両から所定距離だけ離れた基準点を決定して、前記車両の前後方向に延びる左右中心軸のなす角度を決定するための対象となる前記接線を、道路の湾曲に沿って曲がる曲線と前記基準点において接する線とし、前記姿勢決定部は、前記基準点を決定するための前記所定距離を車速に応じて変更することを要旨とする。
【0019】
この発明によれば、車速に応じて、車両の前後方向に延びる左右中心軸のなす角度を決定するための対象となる上記接線を変更することができる。このため、例えば、運転者が前方を注視する距離である前方注視距離に応じて、上記接線に対して車両の前後方向に延びる左右中心軸のなす角度を制御することができる。
【発明の効果】
【0020】
本発明は、湾曲した道路を車両が走行するときの車両の操縦性の向上に貢献する車両姿勢制御装置を提供する。
【図面の簡単な説明】
【0021】
【図1】本発明の第1実施形態の車両姿勢制御装置について、その全体構成を模式的に示す構成図。
【図2】同実施形態の車両姿勢制御装置により実行される車両姿勢制御処理について、その手順を示すフローチャート。
【図3】同実施形態の車両姿勢制御装置について、車両の位置が道路の幅方向において所定の基準位置にあるときの姿勢制御を示す模式図。
【図4】同実施形態の車両姿勢制御装置について、車両の位置が道路の幅方向において所定の基準位置よりも外側にあるときの姿勢制御を示す模式図。
【図5】同実施形態の車両姿勢制御装置について、車両の位置が道路の幅方向において所定の基準位置よりも内側にあるときの姿勢制御を示す模式図。
【図6】本発明の第2実施形態の車両姿勢制御装置により実行される車両姿勢制御処理について、その手順を示すフローチャート。
【図7】同実施形態の車両姿勢制御装置について、道路の曲率が所定の基準曲率であるときの姿勢制御を示す模式図。
【図8】同実施形態の車両姿勢制御装置について、道路の曲率が所定の基準曲率よりも小さいときの姿勢制御を示す模式図。
【図9】同実施形態の車両姿勢制御装置について、道路の曲率が所定の基準曲率よりも大きいときの姿勢制御を示す模式図。
【発明を実施するための形態】
【0022】
(第1実施形態)
図1〜図5を参照して、本発明の第1実施形態について説明する。なお、図中の矢印Xは、車両1の前方および後方を含む前後方向を示す。また、図中の矢印Yは、車両1の左方および右方を含む左右方向を示す。前後方向と左右方向は互いに直交する直線方向である。前後方向および左右方向に直交する直線方向を、上方および下方を含む上下方向とする。前後方向、左右方向、および上下方向は、車両1に固定された座標系の方向を示している。
【0023】
図1に、車体2と車輪3と車両姿勢制御装置4とを有する車両1の全体構成を示す。
前側の車輪3である前輪31,32は、前側の車軸Aである前軸AFを回転中心軸として回転する。左前輪31は、車体2の左前側部位に位置する。右前輪32は、車体2の右前側部位に位置する。
【0024】
後側の車輪3である後輪33,34は、後側の車軸Aである後軸ARを回転中心軸として回転する。左後輪33は、車体2の左後側部位に位置する。右後輪34は、車体2の右後側部位に位置する。
【0025】
ステアリング装置12は、前輪31,32と、前輪31,32の舵角を制御するための操舵ハンドル11とを接続する。前輪31,32の舵角は、操舵ハンドル11が操作されることによって変化する。
【0026】
車両姿勢制御装置4は、車体すべり角推定装置5と、車輪速センサ41〜44と、加速度センサ45と、ヨーレートセンサ46と、道路情報取得部47と、メモリ48と、演算装置49と、前輪制御装置6と、後輪制御装置7とを有する。なお、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7は「姿勢制御部」に相当する。また、演算装置49は「姿勢決定部」に相当する。
【0027】
車体すべり角推定装置5は、車体2の横すべり角を推定する。車体2の横すべり角は、例えば、車両1のヨーレートおよび加速度と、路面の摩擦係数とに基づいて算出される。なお、路面の摩擦係数はその推定精度が低ければ、横すべり角の推定精度が低くなるため、路面の摩擦係数に代えて車輪3に作用する横力に基づいて横すべり角が算出されることが好ましい。車輪3に作用する横力はタイヤ横力センサ(図示略)が検出する。
【0028】
車輪速センサ41は、左前輪31の車輪速を検出する。車輪速センサ42は、右前輪32の車輪速を検出する。車輪速センサ43は、左後輪33の車輪速を検出する。車輪速センサ44は、右後輪34の車輪速を検出する。
【0029】
加速度センサ45は、前後方向および左右方向および上下方向の加速度を検出する。
ヨーレートセンサ46は、上下方向を回転の中心とする車両1の回転の角速度であるヨーレートを検出する。
【0030】
道路情報取得部47は、道路の情報として、車両1が走行する道路の形状の情報であって、車両1の前方の道路の形状の情報を取得する。道路情報取得部47は、例えば、車載カメラ、GPS(Global Positioning System)を用いるGPS受信機、またはこれらの組合せ等により構成される。
【0031】
メモリ48は、演算装置49が実行するプログラムと、同プログラムに用いる情報を記憶する。メモリ48は、プログラムに用いる情報として、車両1の基礎目標姿勢に係る情報を記憶している。本実施形態においては、基礎目標姿勢は、道路の湾曲に沿って曲がる曲線の接線に対して、車両1の前後方向に延びる左右中心軸が平行となる状態である。以下、この状態を「ニュートラル姿勢」という。
【0032】
演算装置49は、ECU(Electronic Control Unit)により構成される集積回路である。演算装置49は、メモリ48に記憶されているプログラムに基づいて車両姿勢制御処理を実行する。
【0033】
車両姿勢制御処理において、演算装置49は、道路情報取得部47により取得した車両1の前方の道路の形状の情報に基づいて、湾曲した道路の幅方向における車両1の位置に係る情報、および車両1が走行している湾曲した道路の曲率に係る情報を取得する。すなわち、演算装置49は、例えば、車載カメラにより撮影された画像データや、車両1の位置情報を含む地図データに基づいて、道路の幅方向における車両1の位置、および道路の曲率を算出する。
【0034】
また、車両姿勢制御処理において、演算装置49は、道路の幅方向における車両1の位置に基づいて、車両1の姿勢を所定の目標姿勢に近づけるための制御量を算出する。演算装置49は算出した制御量を前輪制御装置6および後輪制御装置7の少なくとも一方に出力する。前輪制御装置6および後輪制御装置7は、演算装置49が算出した制御量に基づいて動作する。
【0035】
前輪制御装置6は、操舵ハンドル11の舵角と連動せずに前輪31,32の舵角を制御することが可能なアクティブステアリング装置である。前輪制御装置6は、前輪31,32を制御して車両1の姿勢を制御する。上下方向を回転の中心とする車両1について、その回転の中心の位置(以下、「ヨー回転中心位置」)が、後軸ARよりも前軸AFに近い位置にあるときは、前輪31,32の横すべり角は、後輪33,34の横すべり角よりも小さく、前輪31,32は後輪33,34に比べて路面をグリップしている。よって、このとき、前輪制御装置6は、前輪31,32を制御することによって、車両1の姿勢を効果的に制御する。
【0036】
後輪制御装置7は、駆動輪である後輪33,34について、左後輪33の駆動力と右後輪34の駆動力の配分比率を制御することが可能な左右駆動力配分装置である。後輪制御装置7は、後輪33,34を制御して車両1の姿勢を制御する。ヨー回転中心位置が、前軸AFよりも後軸ARに近い位置にあるときは、後輪33,34の横すべり角は、前輪31,32の横すべり角よりも小さく、後輪33,34は前輪31,32に比べて路面をグリップしている。よって、このとき、後輪制御装置7は、後輪33,34を制御することによって、車両1の姿勢を効果的に制御する。
【0037】
図2を参照して、車両姿勢制御処理について説明する。図2に示す一連の処理は、ステップS11およびS15を除いて、演算装置49が行う。
ステップS11では、車体すべり角推定装置5が車体2の横すべり角を推定する。横すべり角の推定結果は車体すべり角推定装置5から演算装置49に入力される。演算装置49は、横すべり角に基づいて走行中の車両1の姿勢を検出する。
【0038】
ステップS12では、検出された車両1の姿勢と、メモリ48に記憶されている基礎目標姿勢とに基づいて、車両1の姿勢を基礎目標姿勢に近づけるための制御量を算出する。制御量は、前輪制御装置6による前輪31,32の制御量、後輪制御装置7による後輪33,34の制御量に相当する。前輪31,32の制御量は、前輪31,32の舵角の変化量に相当する。また、後輪33,34の制御量は、左後輪33の駆動力と右後輪34の駆動力の差に相当する。
【0039】
ステップS12において、演算装置49は、制御量を算出するために、道路の湾曲に沿って曲がる曲線上に位置し、かつ車両1の前方に位置し、かつ車両1から所定距離だけ離れた基準点を決定する。そして、この基準点で道路の湾曲に沿って曲がる曲線と接する線を基準接線として、演算装置49は、基準接線に対して車両1の前後方向に延びる左右中心軸を平行とするための前輪31,32の制御量および後輪33,34の制御量を算出する。このようにして算出された前輪31,32の制御量および後輪33,34の制御量が、車両1の姿勢を基礎目標姿勢に近づけるための制御量に相当する。なお、演算装置49は、基準点を決定するときに、基準点が決定される上記所定距離を車速に応じて変更する。具体的には、演算装置49は、車速が大きいほど上記所定距離を長くして、基準点を車両1の遠くに位置する点とし、車速が小さいほど上記所定距離を短くして、基準点を車両1の近くに位置する点とする。車速は、車輪速センサ41〜44による車輪速の検出結果に基づいて算出する。
【0040】
ステップS13では、道路情報取得部47を用いて、道路の幅方向における車両1の位置を検出する。
ステップS14では、ステップS13で検出した道路の幅方向における車両1の位置が、所定の基準位置であるか否かを判定する。基準位置は、例えば、道路の幅方向における中央である。ステップS14において、車両1の位置が基準位置であると判定したとき、ステップS15の処理に進む。ステップS14において、車両1の位置が基準位置でないと判定したとき、ステップS16の処理に進む。
【0041】
ステップS15では、演算装置49が算出した制御量に基づいて、前輪制御装置6および後輪制御装置7の少なくとも一方が、車両1の姿勢を制御する。車両1の位置が基準位置であるとステップS14で判定したときは、前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1の姿勢を基礎目標姿勢であるニュートラル姿勢に近づけるように車両1の姿勢を制御する。
【0042】
ステップS16では、ステップS13で検出した道路の幅方向における車両1の位置が、所定の基準位置よりも外側であるか内側であるかを判定する。ステップS16において、車両1の位置が基準位置よりも外側であると判定したとき、ステップS17の処理に進む。ステップS16において、車両1の位置が内側であると判定したとき、ステップS18の処理に進む。
【0043】
ステップS17では、ニュートラル姿勢に比べて車両1が内側を向くように、ステップS12で算出した制御量を補正する。すなわち、車両1の目標姿勢を、道路の湾曲に沿って曲がる曲線の接線に対して、車両1の前方が湾曲した道路の内側を向く状態とする。以下、この状態を「ヘッドイン姿勢」という。制御量を補正するための補正量は、加速度センサ45を用いて検出した加速度、またはヨーレートセンサ46を用いて検出したヨーレート等に基づいて算出する。
【0044】
ステップS17において、車両1の目標姿勢を変更した後は、ステップS15の処理に進む。すなわち、ステップS17を経たステップS15では、ステップS17で補正された制御量に基づいて、前輪制御装置6および後輪制御装置7の少なくとも一方が、車両1の姿勢を制御する。車両1の位置が基準位置よりも外側であるとステップS16で判定したときは、前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1の姿勢を目標姿勢であるヘッドイン姿勢に近づけるように車両1の姿勢を制御する。
【0045】
ステップS18では、ニュートラル姿勢に比べて車両1が外側を向くように、ステップS12で算出した制御量を補正する。すなわち、車両1の目標姿勢を、道路の湾曲に沿って曲がる曲線の接線に対して、車両1の前方が湾曲した道路の外側を向く状態とする。以下、この状態を「ヘッドアウト姿勢」という。制御量を補正するための補正量は、加速度センサ45を用いて検出した加速度、またはヨーレートセンサ46を用いて検出したヨーレート等に基づいて算出する。
【0046】
ステップS18において、車両1の目標姿勢を変更した後は、ステップS15の処理に進む。すなわち、ステップS18を経たステップS15では、ステップS18で補正された制御量に基づいて、前輪制御装置6および後輪制御装置7の少なくとも一方が、車両1の姿勢を制御する。車両1の位置が基準位置よりも内側であるとステップS16で判定したときは、前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1の姿勢を目標姿勢であるヘッドアウト姿勢に近づけるように車両1の姿勢を制御する。
【0047】
図3〜5を参照して、車両姿勢制御装置4の作用について説明する。
図中の一点鎖線は、車両1の前後方向に延びる左右中心軸を示している。また、図中の二点鎖線は、道路の幅方向における所定の基準位置を示している。道路の幅方向は、車両1の進行方向に交差する方向である。
【0048】
また、図中の点Pは、道路の湾曲に沿って曲がる曲線Ri上に位置し、かつ車両1の前方に位置し、かつ車両1から所定距離だけ離れた基準点を示している。車両1の前後方向に延びる左右中心軸のなす角度を決定するための対象となる接線Lは、道路の湾曲に沿って曲がる曲線Riと基準点において接する線である。曲線Riは湾曲した道路の内側の外形である。
【0049】
図3(a)は、道路の幅方向における基準位置を走行している車両1を示している。道路の幅方向における基準位置を走行している車両1の目標姿勢はニュートラル姿勢に設定される。このため、図3(b)に示されるように、車両1の姿勢がニュートラル姿勢に近づくように制御されて、接線Lに対して車両1の前後方向に延びる左右中心軸が平行となる。
【0050】
図4(a)は、道路の幅方向における基準位置よりも外側を走行している車両1を示している。すなわち、車両1の位置は道路の幅方向における基準位置よりも外側にある。道路の幅方向における基準位置よりも外側を走行している車両1の目標姿勢はヘッドイン姿勢に設定される。このため、図4(b)に示されるように、車両1の姿勢がヘッドイン姿勢に近づくように制御されて、車両1の前方が、接線Lの方向、すなわち湾曲した道路の内側を向く。
【0051】
図5(a)は、道路の幅方向における基準位置よりも内側を走行している車両1を示している。すなわち、車両1の位置は道路の幅方向における基準位置よりも内側にある。道路の幅方向における基準位置よりも内側を走行している車両1の目標姿勢はヘッドアウト姿勢に設定される。このため、図5(b)に示されるように、車両1の姿勢がヘッドアウト姿勢に近づくように制御されて、車両1の前方が、接線Lの反対側の方向、すなわち湾曲した道路の外側を向く。
【0052】
(実施形態の効果)
本実施形態の車両姿勢制御装置4は、以下の効果を奏する。
(1)演算装置49が、車両1が走行している湾曲した道路の曲率に係る情報、および湾曲した道路の幅方向における車両1の位置に係る情報の少なくとも一方の情報に基づいて、道路の湾曲に沿って曲がる曲線Riの接線Lに対して車両1の前後方向に延びる左右中心軸のなす角度を決定する。このため、演算装置49は、道路の湾曲に沿って曲がる曲線Riの接線Lに対して車両1の前後方向に延びる左右中心軸のなす角度を決定して、車両1が実際に走行する道路の湾曲態様に応じた車両1の目標姿勢を決定することができる。そして、前輪制御装置6または後輪制御装置7が、車両1の姿勢を演算装置49が決定した目標姿勢に近づけるため、演算装置49が車両1の目標姿勢を動的に決定することにより、様々な道路の湾曲態様に応じて、道路の曲線Riの接線Lに対して車両1の前後方向に延びる左右中心軸のなす角度を制御することができる。よって、湾曲した道路を車両1が走行するときの車両1の操縦性を向上させることができる。
【0053】
(2)演算装置49は、車両1の位置が道路の幅方向における所定の基準位置にあるとき、ニュートラル姿勢を車両1の目標姿勢とする。このため、道路の幅方向における所定の基準位置に車両1が位置するときには、車両1の前後方向に延びる左右中心軸が、道路の曲線Riの接線Lに対して平行となるように車両1の姿勢が制御される。このため、道路の幅方向における所定の基準位置が道路の中央であれば、道路の中央を走行し続けることが容易となるように車両1の操縦性を向上させることができる。
【0054】
(3)演算装置49は、車両1の位置が道路の幅方向において所定の基準位置よりも外側にあるとき、ヘッドイン姿勢を車両1の目標姿勢とする。このため、道路の幅方向における所定の基準位置よりも外側に車両1が位置するときには、車両1の前後方向に延びる左右中心軸が、道路の曲線Riの接線Lに対して、湾曲した道路の内側を向くように車両1の姿勢が制御される。このため、道路の幅方向において所定の基準位置より外側に位置する車両1が、湾曲した道路の内側へ向けて走行することが容易となるように車両1の操縦性を向上させることができる。
【0055】
(4)演算装置49は、車両1の位置が道路の幅方向において所定の基準位置よりも内側にあるとき、ヘッドアウト姿勢を車両1の目標姿勢とする。このため、道路の幅方向における所定の基準位置よりも内側に車両1が位置するときには、車両1の前後方向に延びる左右中心軸が、道路の曲線Riの接線Lに対して、湾曲した道路の外側を向くように車両1の姿勢が制御される。このため、道路の幅方向において所定の基準位置より内側に位置する車両1が、湾曲した道路の外側へ向けて走行することが容易となるように車両1の操縦性を向上させることができる。
【0056】
(5)演算装置49は、道路の湾曲に沿って曲がる曲線Ri上に位置し、かつ車両1の前方に位置し、かつ車両1から所定距離だけ離れた基準点を決定して、車両1の前後方向に延びる左右中心軸のなす角度を決定するための対象となる接線Lを、道路の湾曲に沿って曲がる曲線Riと基準点において接する線とし、演算装置49は、基準点を決定するための上記所定距離を車速に応じて変更する。このため、車速に応じて、車両1の前後方向に延びる左右中心軸のなす角度を決定するための対象となる上記接線Lを変更することができる。このため、例えば、運転者が前方を注視する距離である前方注視距離に応じて、上記接線Lに対して車両1の前後方向に延びる左右中心軸のなす角度を制御することができる。
【0057】
(第2実施形態)
図6〜図9を参照して、本発明の第2実施形態について説明する。本実施形態では、第1実施形態の車両姿勢制御処理を変更したものである。以下では第1実施形態の車両姿勢制御装置4と異なる部分について詳細に説明するとともに、第1実施形態と共通する構成については同一の符号を付してその説明の一部または全部を省略する。
【0058】
本実施形態の車両姿勢制御処理において、演算装置49は、車両1が走行している湾曲した道路の曲率に基づいて、車両1の姿勢を所定の目標姿勢に近づけるための制御量を算出する。
【0059】
図6を参照して、車両姿勢制御処理について説明する。図6に示す一連の処理は、ステップS21およびS25を除いて、演算装置49が行う。
ステップS21では、車体すべり角推定装置5が車体2の横すべり角を推定する。横すべり角の推定結果は車体すべり角推定装置5から演算装置49に入力される。演算装置49は、横すべり角に基づいて走行中の車両1の姿勢を検出する。
【0060】
ステップS22では、第1実施形態のステップS12と同様にして、検出された車両1の姿勢と、メモリ48に記憶されている基礎目標姿勢とに基づいて、車両1の姿勢を基礎目標姿勢に近づけるための制御量を算出する。
【0061】
ステップS23では、道路情報取得部47を用いて、車両1が走行している湾曲した道路の曲率を算出する。
ステップS24では、ステップS23で算出した道路の曲率が、所定の基準曲率であるか否かを判定する。ステップS24において、道路の曲率が基準曲率であると判定したとき、ステップS25の処理に進む。ステップS24において、道路の曲率が基準曲率でないと判定したとき、ステップS26の処理に進む。
【0062】
ステップS25では、演算装置49が算出した制御量に基づいて、前輪制御装置6および後輪制御装置7の少なくとも一方が、車両1の姿勢を制御する。道路の曲率が基準曲率であるとステップS24で判定したときは、前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1の姿勢を基礎目標姿勢であるニュートラル姿勢に近づけるように車両1の姿勢を制御する。
【0063】
ステップS26では、ステップS23で算出した道路の曲率が、所定の基準曲率よりも大きいか小さいかを判定する。ステップS26において、道路の曲率が基準曲率よりも小さいと判定したとき、ステップS27の処理に進む。ステップS26において、道路の曲率が基準曲率よりも大きいと判定したとき、ステップS28の処理に進む。
【0064】
ステップS27では、ニュートラル姿勢に比べて車両1が内側を向くように、ステップS22で算出した制御量を補正する。すなわち、車両1の前方が所定の基準方向を向く状態であるニュートラル姿勢を「基準姿勢」として、車両1の目標姿勢を、車両1の前方が、基準姿勢に比べて湾曲した道路の内側を向く状態とする。以下、この状態を「内向き姿勢」という。制御量を補正するための補正量は、加速度センサ45を用いて検出した加速度、またはヨーレートセンサ46を用いて検出したヨーレート等に基づいて算出する。
【0065】
ステップS27において、車両1の目標姿勢を変更した後は、ステップS25の処理に進む。すなわち、ステップS27を経たステップS25では、ステップS27で補正された制御量に基づいて、前輪制御装置6および後輪制御装置7の少なくとも一方が、車両1の姿勢を制御する。道路の曲率が基準曲率よりも小さいとステップS26で判定したときは、前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1の姿勢を目標姿勢である内向き姿勢に近づけるように車両1の姿勢を制御する。
【0066】
ステップS28では、ニュートラル姿勢に比べて車両1が外側を向くように、ステップS22で算出した制御量を補正する。すなわち、車両1の前方が所定の基準方向を向く状態であるニュートラル姿勢を「基準姿勢」として、車両1の目標姿勢を、車両1の前方が、基準姿勢に比べて湾曲した道路の外側を向く状態とする。以下、この状態を「外向き姿勢」という。制御量を補正するための補正量は、加速度センサ45を用いて検出した加速度、またはヨーレートセンサ46を用いて検出したヨーレート等に基づいて算出する。
【0067】
ステップS28において、車両1の目標姿勢を変更した後は、ステップS25の処理に進む。すなわち、ステップS28を経たステップS25では、ステップS28で補正された制御量に基づいて、前輪制御装置6および後輪制御装置7の少なくとも一方が、車両1の姿勢を制御する。道路の曲率が基準曲率よりも大きいとステップS26で判定したときは、前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1の姿勢を目標姿勢である外向き姿勢に近づけるように車両1の姿勢を制御する。
【0068】
図7〜9を参照して、車両姿勢制御装置4の作用について説明する。
図7(a)は、基準曲率を有する道路を走行している車両1を示している。基準曲率を有する道路を走行している車両1の目標姿勢は、基準姿勢であるニュートラル姿勢に設定される。このため、図7(b)に示されるように、車両1の姿勢がニュートラル姿勢に近づくように制御されて、接線Lに対して車両1の前後方向に延びる左右中心軸が平行となる。
【0069】
図8(a)は、基準曲率よりも小さい曲率を有する道路を走行している車両1を示している。すなわち、湾曲した道路の内側の外形である曲線Riについて、図8の曲線Riの半径は図7の曲線Riに比べて大きい。基準曲率よりも小さい曲率を有する道路を走行している車両1の目標姿勢は内向き姿勢に設定される。このため、図8(b)に示されるように、車両1の姿勢が内向き姿勢に近づくように制御されて、車両1の前方が、接線Lの方向、すなわち湾曲した道路の内側を向く。
【0070】
図9(a)は、基準曲率よりも大きい曲率を有する道路を走行している車両1を示している。すなわち、湾曲した道路の内側の外形である曲線Riについて、図9の曲線Riの半径は図7の曲線Riに比べて小さい。基準曲率よりも大きい曲率を有する道路を走行している車両1の目標姿勢は外向き姿勢に設定される。このため、図9(b)に示されるように、車両1の姿勢が外向き姿勢に近づくように制御されて、車両1の前方が、接線Lの反対側の方向、すなわち湾曲した道路の外側を向く。
【0071】
(実施形態の効果)
本実施形態の車両姿勢制御装置4は、上記(1)〜(4)に代え以下の効果を奏する。
(6)演算装置49が、車両1が走行している湾曲した道路の曲率に係る情報の情報に基づいて、道路の湾曲に沿って曲がる曲線Riの接線Lに対して車両1の前後方向に延びる左右中心軸のなす角度を決定する。このため、演算装置49は、道路の湾曲に沿って曲がる曲線Riの接線Lに対して車両1の前後方向に延びる左右中心軸のなす角度を決定して、車両1が実際に走行する道路の湾曲態様に応じた車両1の目標姿勢を決定することができる。そして、前輪制御装置6または後輪制御装置7が、車両1の姿勢を演算装置49が決定した目標姿勢に近づけるため、演算装置49が車両1の目標姿勢を動的に決定することにより、様々な道路の湾曲態様に応じて、道路の曲線Riの接線Lに対して車両1の前後方向に延びる左右中心軸のなす角度を制御することができる。よって、湾曲した道路を車両1が走行するときの車両1の操縦性を向上させることができる。
【0072】
(7)演算装置49は、道路の曲率が所定の基準曲率であるときに基準姿勢を目標姿勢とし、道路の曲率が所定の基準曲率よりも小さいときに内向き姿勢を目標姿勢とする。このため、道路の曲率が所定の基準曲率よりも小さいときには、道路の曲率が所定の基準曲率であるときに比べて、車両1の前方が、湾曲した道路の内側を向くように車両1の姿勢が制御される。このため、所定の基準曲率を有するカーブに比べて緩いカーブを走行する車両が、湾曲した道路の内側へ向けて走行することが容易となるように車両1の操縦性を向上させることができる。
【0073】
(8)演算装置49は、道路の曲率が所定の基準曲率よりも大きいときに外向き姿勢を目標姿勢とする。このため、道路の曲率が所定の基準曲率よりも大きいときには、道路の曲率が所定の基準曲率であるときに比べて、車両1の前方が、湾曲した道路の外側を向くように車両1の姿勢が制御される。このため、所定の基準曲率を有するカーブに比べて急なカーブを走行する車両1が、湾曲した道路の外側へ向けて走行することが容易となるように車両1の操縦性を向上させることができる。
【0074】
(その他の実施形態)
本発明は、第1および第2実施形態以外の実施形態を含む。以下、本発明のその他の実施形態としての上記実施形態の変形例を示す。なお、以下の各変形例は、互いに組み合わせることもできる。
【0075】
・第1および第2実施形態を組み合わせることもできる。すなわち、演算装置49が、車両1が走行している湾曲した道路の曲率に係る情報、および湾曲した道路の幅方向における車両1の位置に係る情報の双方の情報に基づいて、道路の湾曲に沿って曲がる曲線の接線に対して車両1の前後方向に延びる左右中心軸のなす角度を決定することもできる。
【0076】
・上記実施形態(図1)の前輪制御装置6は、アクティブステアリング装置である。一方、変形例において、前輪制御装置6は、独立駆動装置または左右駆動力配分装置である。すなわち、前輪制御装置6は、前輪31,32の舵角を制御する差動機構装置またはステアバイワイヤ装置等のアクティブステアリング装置に限定されない。
【0077】
・上記実施形態(図1)の後輪制御装置7は、左右駆動力配分装置である。一方、変形例において、後輪制御装置7は、独立駆動装置、または後輪33,34の舵角を制御することが可能な後輪ステアリング装置である。すなわち、後輪制御装置7は、後輪33,34の駆動力の比率を制御する駆動力配分装置に限定されない。
【符号の説明】
【0078】
1…車両、2…車体、3…車輪、4…車両姿勢制御装置、5…車体すべり角推定装置、6…前輪制御装置(姿勢制御部)、7…後輪制御装置(姿勢制御部)、11…操舵ハンドル、12…パワーステアリング装置、31…左前輪、32…右前輪、33…左後輪、34…右後輪、41〜44…車輪速センサ、45…加速度センサ、46…ヨーレートセンサ、47…道路情報取得部、48…メモリ、49…演算装置(姿勢決定部)、A…車軸、AF…前軸)、AR…後軸。
【特許請求の範囲】
【請求項1】
車両の姿勢を制御する姿勢制御部と、前記車両の目標姿勢を決定する姿勢決定部とを備え、前記姿勢制御部が、前記車両の姿勢を、前記姿勢決定部により決定された前記目標姿勢に近づける車両姿勢制御装置において、
前記姿勢決定部が、前記車両が走行している湾曲した道路の曲率に係る情報、および湾曲した道路の幅方向における前記車両の位置に係る情報の少なくとも一方の情報に基づいて、道路の湾曲に沿って曲がる曲線の接線に対して前記車両の前後方向に延びる左右中心軸のなす角度を決定する
ことを特徴とする車両姿勢制御装置。
【請求項2】
請求項1に記載の車両姿勢制御装置において、
道路の湾曲に沿って曲がる曲線の接線に対して、前記車両の前後方向に延びる左右中心軸が平行となる状態を、「ニュートラル姿勢」とし、
前記姿勢決定部は、前記車両の位置が道路の幅方向における所定の基準位置にあるとき、前記ニュートラル姿勢を前記目標姿勢とする
ことを特徴とする車両姿勢制御装置。
【請求項3】
請求項1または2に記載の車両姿勢制御装置において、
道路の湾曲に沿って曲がる曲線の接線に対して、前記車両の前方が湾曲した道路の内側を向く状態を、「ヘッドイン姿勢」とし、
前記姿勢決定部は、前記車両の位置が道路の幅方向において所定の基準位置よりも外側にあるとき、前記ヘッドイン姿勢を前記目標姿勢とする
ことを特徴とする車両姿勢制御装置。
【請求項4】
請求項1〜3のいずれか一項に記載の車両姿勢制御装置において、
道路の湾曲に沿って曲がる曲線の接線に対して、前記車両の前方が湾曲した道路の外側を向く状態を、「ヘッドアウト姿勢」とし、
前記姿勢決定部は、前記車両の位置が道路の幅方向において所定の基準位置よりも内側にあるとき、前記ヘッドアウト姿勢を前記目標姿勢とする
ことを特徴とする車両姿勢制御装置。
【請求項5】
請求項1〜4のいずれか一項に記載の車両姿勢制御装置において、
前記車両の前方が、所定の基準方向を向く状態を、「基準姿勢」とし、
前記車両の前方が、前記基準姿勢に比べて湾曲した道路の内側を向く状態を、「内向き姿勢」とし、
前記姿勢決定部は、道路の曲率が所定の基準曲率であるときに前記基準姿勢を前記目標姿勢とし、道路の曲率が所定の基準曲率よりも小さいときに前記内向き姿勢を前記目標姿勢とする
ことを特徴とする車両姿勢制御装置。
【請求項6】
請求項5に記載の車両姿勢制御装置において、
前記車両の前方が、前記基準姿勢に比べて湾曲した道路の外側を向く状態を、「外向き姿勢」とし、
前記姿勢決定部は、道路の曲率が所定の基準曲率よりも大きいときに前記外向き姿勢を前記目標姿勢とする
ことを特徴とする車両姿勢制御装置。
【請求項7】
請求項1〜6のいずれか一項に記載の車両姿勢制御装置において、
前記姿勢決定部は、道路の湾曲に沿って曲がる曲線上に位置し、かつ前記車両の前方に位置し、かつ前記車両から所定距離だけ離れた基準点を決定して、
前記車両の前後方向に延びる左右中心軸のなす角度を決定するための対象となる前記接線を、道路の湾曲に沿って曲がる曲線と前記基準点において接する線とし、
前記姿勢決定部は、前記基準点を決定するための前記所定距離を車速に応じて変更する
ことを特徴とする車両姿勢制御装置。
【請求項1】
車両の姿勢を制御する姿勢制御部と、前記車両の目標姿勢を決定する姿勢決定部とを備え、前記姿勢制御部が、前記車両の姿勢を、前記姿勢決定部により決定された前記目標姿勢に近づける車両姿勢制御装置において、
前記姿勢決定部が、前記車両が走行している湾曲した道路の曲率に係る情報、および湾曲した道路の幅方向における前記車両の位置に係る情報の少なくとも一方の情報に基づいて、道路の湾曲に沿って曲がる曲線の接線に対して前記車両の前後方向に延びる左右中心軸のなす角度を決定する
ことを特徴とする車両姿勢制御装置。
【請求項2】
請求項1に記載の車両姿勢制御装置において、
道路の湾曲に沿って曲がる曲線の接線に対して、前記車両の前後方向に延びる左右中心軸が平行となる状態を、「ニュートラル姿勢」とし、
前記姿勢決定部は、前記車両の位置が道路の幅方向における所定の基準位置にあるとき、前記ニュートラル姿勢を前記目標姿勢とする
ことを特徴とする車両姿勢制御装置。
【請求項3】
請求項1または2に記載の車両姿勢制御装置において、
道路の湾曲に沿って曲がる曲線の接線に対して、前記車両の前方が湾曲した道路の内側を向く状態を、「ヘッドイン姿勢」とし、
前記姿勢決定部は、前記車両の位置が道路の幅方向において所定の基準位置よりも外側にあるとき、前記ヘッドイン姿勢を前記目標姿勢とする
ことを特徴とする車両姿勢制御装置。
【請求項4】
請求項1〜3のいずれか一項に記載の車両姿勢制御装置において、
道路の湾曲に沿って曲がる曲線の接線に対して、前記車両の前方が湾曲した道路の外側を向く状態を、「ヘッドアウト姿勢」とし、
前記姿勢決定部は、前記車両の位置が道路の幅方向において所定の基準位置よりも内側にあるとき、前記ヘッドアウト姿勢を前記目標姿勢とする
ことを特徴とする車両姿勢制御装置。
【請求項5】
請求項1〜4のいずれか一項に記載の車両姿勢制御装置において、
前記車両の前方が、所定の基準方向を向く状態を、「基準姿勢」とし、
前記車両の前方が、前記基準姿勢に比べて湾曲した道路の内側を向く状態を、「内向き姿勢」とし、
前記姿勢決定部は、道路の曲率が所定の基準曲率であるときに前記基準姿勢を前記目標姿勢とし、道路の曲率が所定の基準曲率よりも小さいときに前記内向き姿勢を前記目標姿勢とする
ことを特徴とする車両姿勢制御装置。
【請求項6】
請求項5に記載の車両姿勢制御装置において、
前記車両の前方が、前記基準姿勢に比べて湾曲した道路の外側を向く状態を、「外向き姿勢」とし、
前記姿勢決定部は、道路の曲率が所定の基準曲率よりも大きいときに前記外向き姿勢を前記目標姿勢とする
ことを特徴とする車両姿勢制御装置。
【請求項7】
請求項1〜6のいずれか一項に記載の車両姿勢制御装置において、
前記姿勢決定部は、道路の湾曲に沿って曲がる曲線上に位置し、かつ前記車両の前方に位置し、かつ前記車両から所定距離だけ離れた基準点を決定して、
前記車両の前後方向に延びる左右中心軸のなす角度を決定するための対象となる前記接線を、道路の湾曲に沿って曲がる曲線と前記基準点において接する線とし、
前記姿勢決定部は、前記基準点を決定するための前記所定距離を車速に応じて変更する
ことを特徴とする車両姿勢制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−111985(P2013−111985A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−256696(P2011−256696)
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000001247)株式会社ジェイテクト (7,053)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000001247)株式会社ジェイテクト (7,053)
【Fターム(参考)】
[ Back to top ]