
車両姿勢角算出装置及びそれを用いた車線逸脱警報システム
【課題】車両ピッチ角が変化する状況下においても、道路消失点の情報を使わずに安定して車線に対する車両のヨー角を求めることのできる車両姿勢角算出装置を提供する。
【解決手段】車載用撮像装置から取り込んだ車外を撮像した画像情報から区画線を検出する区画線検出部と、区画線と車載用撮像装置の光軸間の距離を所定の処理周期毎に算出する距離算出部と、算出された区画線と車載用撮像装置の光軸間の距離と所定の処理周期の間に車両が進行した車両進行距離に基づいて区画線の角度を算出する車両角度算出部と、を有する車両姿勢角算出装置。
【解決手段】車載用撮像装置から取り込んだ車外を撮像した画像情報から区画線を検出する区画線検出部と、区画線と車載用撮像装置の光軸間の距離を所定の処理周期毎に算出する距離算出部と、算出された区画線と車載用撮像装置の光軸間の距離と所定の処理周期の間に車両が進行した車両進行距離に基づいて区画線の角度を算出する車両角度算出部と、を有する車両姿勢角算出装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載カメラを用いて車両が走行している車線に対する車両の姿勢角を算出する方法に関する。
【背景技術】
【0002】
車載カメラにより車両の周囲を撮像し、撮像した画像中の物体(車両,歩行者など)や道路標示・標識(区画線などの路面ペイント,止まれなどの標識など)を認識するための技術が種々提案されている。例えば、車載カメラで道路上にペイントが施されている区画線を認識し、車線内の車両位置を求めることができれば、車両が車線から逸脱するときに運転者に警報を発したり、ステアリングやブレーキを制御したりして逸脱を抑制することが可能となる。
【0003】
このように車両が車線を逸脱するときに警報を発するシステムとして、JIS(日本工業規格)のJIS D 0804で規格化されている車線逸脱警報システム(LDWS:Lane Departure Warning Systems)がある。この規格をとくに車両の後方を撮像し、撮像した画像中の区画線を認識する車載カメラを用いて実現する場合、車両後方で認識した区画線の情報を車両前輪位置に補正する必要があるため、この補正の際に利用する情報として車線に対する車両のヨー角を正確に求める必要がある。
【0004】
例えば、特許文献1には、車載カメラにて撮像される画面内において2本の道路平行線が交わって消失する点である道路消失点を求め、この2本の道路平行線と道路消失点に基づいて車載カメラの姿勢パラメータ(姿勢角(ヨー角))を算出する装置が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平7−147000号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1においては、走行中の道路が直線かつ平坦の場合でないと道路消失点を求めることは困難であり、また、道路消失点を求めても車両ピッチ角の変化(乗車人数の変化や燃料消費などによる)などにより道路消失点と道路平行線の関係が変わるため、車線に対する車両ヨー角に誤差が発生する問題がある。
【0007】
本発明の目的は、車両ピッチ角が変化する状況下においても、道路消失点の情報を使わずに安定して車線に対する車両のヨー角を求めることのできる車両姿勢角算出装置を提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明は、車載用撮像装置から取り込んだ車外を撮像した画像情報から区画線を検出する区画線検出部と、区画線と車載用撮像装置の光軸間の距離を所定の処理周期毎に算出する距離算出部と、算出された区画線と車載用撮像装置の光軸間の距離と所定の処理周期の間に車両が進行した車両進行距離に基づいて区画線の角度を算出する車両角度算出部と、を有する構成とする。
【発明の効果】
【0009】
本発明によれば、車両ピッチ角が変化する状況下においても、道路消失点の情報を使わずに安定して車線に対する車両のヨー角を求めることのできる車両姿勢角算出装置を提供できる。
【図面の簡単な説明】
【0010】
【図1】本発明に係る車両姿勢角算出装置の第1の実施形態の概略図である。
【図2】本発明に係る車両姿勢角算出装置の処理内容を示すフローチャートを示す図である。
【図3】本発明の区画線検出部の処理内容を示す概略図である。
【図4】本発明の区画線までの距離算出部の処理内容を示す概略図である。
【図5】本発明の区画線角度算出処理の処理内容を示すフローチャートを示す図である。
【図6】本発明の区画線の角度を算出する方法の一例を示す図である。
【図7】本発明に係る車両姿勢角算出装置を用いた車線逸脱警報システムの概略図である。
【図8】本発明の区画線までの距離補正部を説明する概略図である。
【図9】本発明に係る車線逸脱警報システムの処理内容の具体例を示す図である。
【発明を実施するための形態】
【0011】
以下、実施形態について図面を用いて詳細に説明する。
【0012】
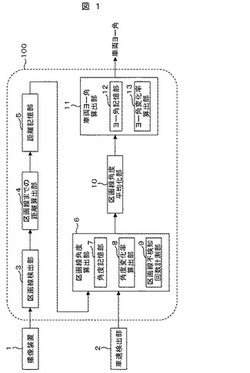
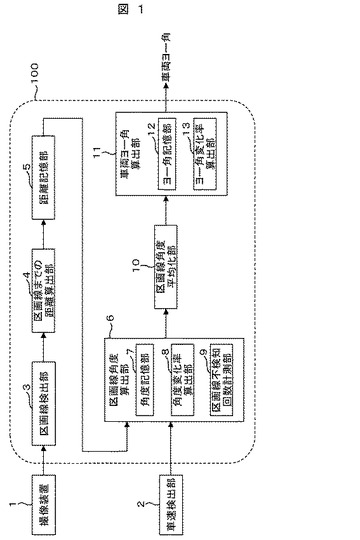
図1は、第1の実施形態に係る車両姿勢角算出装置100の概略図である。
【0013】
まず、車両姿勢角算出装置100の構成と処理内容について説明する。
【0014】
車両姿勢角算出装置100は、区画線検出部3,区画線までの距離算出部4,距離記憶部5,区画線角度算出部6,角度記憶部7,角度変化率算出部8,区画線不検知回数計測部9,区画線角度平均化部10,車両ヨー角算出部11,ヨー角記憶部12,ヨー角変化率算出部13によって構成され、車両姿勢角算出装置100の図示しないコンピュータにプログラミングされ、予め定められた周期で繰り返し実行される。
【0015】
また、車両姿勢角算出装置100は、撮像装置1により撮像された画像を入力し、さらに、車速検出部2により検出された車速を入力して、車線に対する車両のヨー角などを外部に出力する構成となっている。
【0016】
撮像装置1は、CCD(Charge Coupled Device)イメージセンサやCMOS(Complementary Metal Oxide Semiconductor)イメージセンサなどの撮像素子によって自車外を撮像し、得られた画像をデジタル処理してコンピュータで扱える画像データに変換する。
【0017】
車速検出部2は、車両が進行する速度を検出するものであり、車両の前後左右各輪に装着された車輪速センサにより得られる値を平均して車速を検出する方法や、自車に搭載する加速度センサにより得られる自車の加速度の値を積分して車速を算出する方法などがある。
【0018】
区画線検出部3は、車載用の撮像装置1により取得した車外を撮像した画像データ(画像情報)を用いて道路上にペイントされている区画線(自車の左右にある一対の左右線など),車道外側線など)を検出する。
【0019】
区画線までの距離算出部4は、区画線検出部3で検出された区画線と撮像装置1の光軸との距離(区画線までの距離)を算出する。この算出は、所定の処理周期で複数回算出する。
【0020】
距離記憶部5は、区画線までの距離算出部4で算出された区画線までの距離を過去複数個記憶する。なお、その記憶媒体としては、コンピュータ内部のRAM(Random Access Memory)が一般的である。
【0021】
区画線角度算出部6は、角度記憶部7,角度変化率算出部8,区画線不検知回数計測部9によって構成され、距離記憶部5に記憶されている過去複数個の区画線までの距離と、検出した車両速度(又は車両速度から求められた演算周期間に車両が進行した車両進行距離)と、を用いて区画線の角度を算出する。
【0022】
角度記憶部7は、区画線角度算出部6で算出された区画線の角度を過去複数個記憶する部分であり、その記憶媒体としては、距離記憶部5と同様にコンピュータ内部のRAMが一般的である。
【0023】
角度変化率算出部8は、角度記憶部7に記憶されている過去複数個の区画線の角度を用いて区画線の角度変化率を算出する。
【0024】
区画線不検知回数計測部9は、区画線までの距離算出部4において区画線までの距離が連続して算出できなかった回数(不検知カウンタ)を計測する。
【0025】
区画線角度平均化部10は、区画線までの距離算出部4において複数個の区画線までの距離を算出した場合、区画線角度算出部6で算出される区画線の角度も複数個となるため、この複数個の区画線の角度を平均する。なお、区画線までの距離算出部4において1本の区画線につき1個の区画線までの距離しか算出しない場合は、区画線角度平均化部10による平均する処理は行わずにそのままの値を出力する。
【0026】
車両ヨー角算出部11は、算出された区画線の角度に基づいて区画線に対する車両のヨー角を算出する。具体的には、区画線角度平均化部10により平均された区画線の角度を車線に対する車両のヨー角に変換する。また、車両のヨー角の変化率を用いて現在の車両のヨー角を予測する。
【0027】
ヨー角記憶部12は、車両ヨー角算出部11で算出された車両のヨー角を過去複数個記憶する部分であり、その記憶媒体としては、距離記憶部5および角度記憶部7と同様にコンピュータ内部のRAMが一般的である。
【0028】
ヨー角変化率算出部13は、ヨー角記憶部12に記憶されている過去複数個の車両のヨー角を用いて車両のヨー角の変化率を算出する。
【0029】
なお、区画線角度算出部6と、区画線角度平均化部10と、車両ヨー角算出部11と、を車両角度算出部とし、車両角度算出部の出力は、車両のヨー角となる。ただ条件によっては、区画線角度算出部6で算出される区画線の角度と、車両ヨー角算出部11で算出される車両のヨー角とが同じ場合もある。そのときは、区画線の角度がそのまま車両のヨー角として車両角度算出部から出力される。
【0030】
次に、車両姿勢角算出装置全体の処理内容について説明する。
【0031】
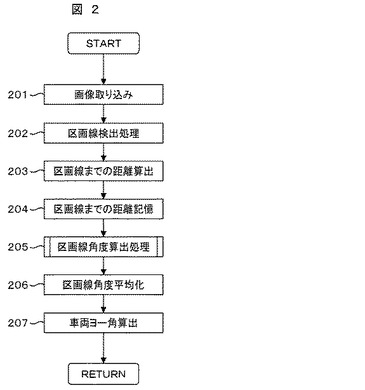
図2は、車両姿勢角算出装置100の処理内容を示すフローチャートである。
【0032】
まず、処理201において、撮像装置1により撮像した画像をデジタル処理して画像データとして取り込む。
【0033】
次に、処理202において、処理201で取り込んだ画像データから道路上にペイントされている区画線を区画線検出部3により検出する。この区画線を検出する処理について具体的な方法を図3を用いて説明する。図3(a)は、処理201で取り込んだ画像データであり、2本の区画線301および302が存在している。この区画線を検出するための一手法として、画像内のエッジ強度を計算して区画線を抽出する方法がある。ここで、エッジとは画像中で輝度値が急激に変わる点である。図3(b)は図3(a)のAからBに向かってエッジ強度を検出した結果であり、303および305のピークはそれぞれ道路から区画線に変わる点(輝度値が暗から明に急変する点)であり、304および305のピークはそれぞれ区画線から道路に変わる点(輝度値が明から暗に急変する点)である。このように、303と304の組み合わせ,305と306の組み合わせを見つけることで区画線の検出が可能である。
【0034】
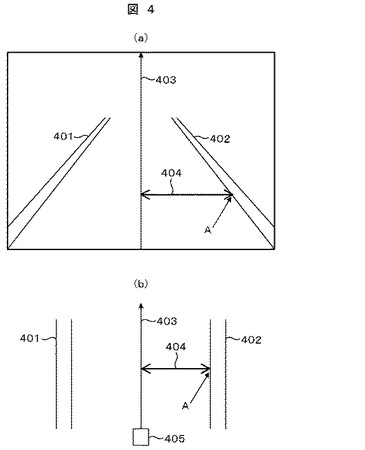
次に、処理203において、処理202で検出した区画線と撮像装置1の光軸との距離(区画線までの距離)を区画線までの距離算出部4により算出する。この区画線までの距離を算出する処理について具体的な方法を図4を用いて説明する。図4(a)は、図3(a)と同様に、処理201で取り込んだ画像データであり、図4(b)は、図4(a)と同じ状況時の上部から見た平面図である。ここでは、2本の区画線401および402が存在しており、矢印403は撮像装置1の光軸,405は撮像装置1である。例えば、区画線402までの距離は矢印404で示すように、光軸403から区画線402のA点までの距離であり、図4(a)上でのA点の座標をエッジ強度のピークから求めて図4(b)の実際の座標系に変換して距離を算出する。なお、区画線までの距離は区画線内側の座標を用いるのではなく、区画線外側もしくは区画線中心の座標を用いてもよく、一貫して同じ定義であれば良い。また、区画線までの距離は画像内の各区画線に対して1つずつではなく、各区画線に対して複数個(例えば、10個)算出する構成としても良い。
【0035】
次に、処理204において、処理203で算出した区画線までの距離や、検出した車両速度や、演算周期間に車両が進行した車両進行距離を距離記憶部5によりコンピュータ内部のRAMに記憶する。ここでは、過去複数回(例えば、過去10回分)の処理結果を記憶するものとする。なお、処理203において複数個の区画線までの距離を算出する構成の場合は、複数個それぞれを過去複数回分記憶するものとする。
【0036】
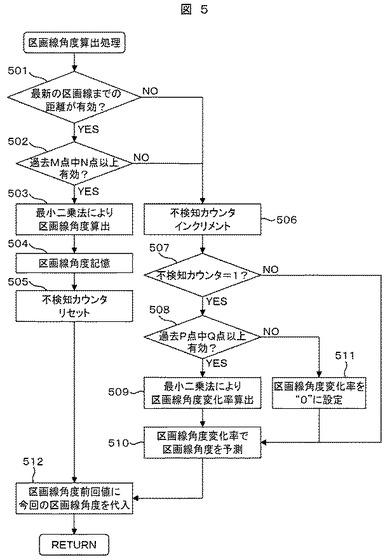
次に、処理205において、処理204で記憶してある過去複数個の区画線までの距離を用いて区画線の角度を区画線角度算出部6により算出する。具体的な処理内容を図5のフローチャートを用いて説明する。なお、処理203において複数個の区画線までの距離を算出する構成の場合は、複数個それぞれに対して区画線の角度を算出するものとする。
【0037】
まず、処理501において、処理204で記憶してある過去複数個の区画線までの距離のうち、最新の区画線までの距離が有効であるか否か、つまり最新の距離が算出できているか否かを判定し、最新の区画線までの距離が有効である場合は処理502に進み、最新の区画線までの距離が有効でない場合は処理506にすすむ。ここで、最新の区画線までの距離が有効とは、処理203において区画線までの距離が算出できている場合であり、区画線の種別が破線や点線などで途切れる場合には区画線までの距離が算出できないこともある。
【0038】
処理502において、処理204で記憶してある過去複数個の区画線までの距離のうち、最新値から数えてM点中N点以上(例えば、8点中4点以上)有効であるか否か、つまり、複数の距離が予め定めた第1の所定値以上、算出できているか否かを判定し、M点中N点以上有効である場合(予め定めた数以上、算出できていると判定された場合)は処理503に進み、M点中N点以上有効でない場合は処理506に進む。なお、MやNは、予め定めて記憶装置等に記憶しておく。
【0039】
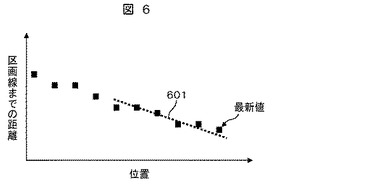
処理503において、処理502で判定した区画線までの距離の有効値を用いて区画線の角度を算出する。具体例としては、図6に示すように、区画線までの距離の最新値から数えて6点の過去の情報から最小二乗法により回帰直線601を求めて区画線の角度を算出する。なお、このグラフの横軸は位置(演算周期間に車両が進行した距離)となっており、車両速度と演算周期により求める。
【0040】
次に、処理504において、処理503で算出した区画線の角度を角度記憶部7によりコンピュータ内部のRAMに記憶する。
【0041】
次に、処理505において、処理203で区画線までの距離が算出できなかった場合にインクリメントする不検知カウンタをリセットし、処理512において、区画線の角度前回値φzに処理503で計算した区画線の角度φを代入し、一連の処理を終了する。
【0042】
処理506において、処理203で区画線までの距離が算出できなかった場合にインクリメントする不検知カウンタをインクリメントする。
【0043】
次に、処理507において、不検知カウンタが1であるか否かを判定し、不検知カウンタが1の場合は処理508に進み、不検知カウンタが1でない場合は処理510に進む。
【0044】
処理508において、処理504で記憶してある過去複数個の区画線の角度のうち、最新値から数えてP点中Q点以上(例えば、6点中3点以上)有効であるか否か、つまり過去に算出された複数の区画線の角度が予め定めた数以上、算出できているか否かを判定し、P点中Q点以上有効である場合(予め定めた第2の所定値以上、算出できていると判定された場合)は処理509に進み、P点中Q点以上有効でない場合は処理511に進む。なお、PやQは、予め定めて記憶装置等に記憶しておく。
【0045】
処理509において、処理508で判定した区画線の角度の有効値を用いて区画線の角度変化率(区画線の角度を演算周期間に車両が進行した距離で微分した値)を算出する。具体的な方法は図6で説明した方法と同様に、縦軸を区画線の角度に置き換えて最小二乗法等により回帰直線を求めて区画線の角度変化率を算出する。
【0046】
処理511において、区画線の角度変化率を0に設定する。
【0047】
なお、処理509と処理511の違いは、処理508で判定した区画線の角度の有効値の個数で決めており、区画線の角度変化率を算出するうえで所定の個数以上(例えば、3点以上)の区画線の角度がないと区画線の角度変化率の計算結果の信頼度が低くなるためである。
【0048】
次に、処理510において、処理509または処理511で算出した区画線の角度変化率を用いて区画線の角度を予測する。具体的には、区画線の角度φは、後述する区画線の角度前回値φz,区画線の角度変化率α,演算周期Δtを用いて(1)式で計算できる。
【0049】
(数1)
φ=φz+α×Δt (1)
最後に、処理512において、区画線の角度前回値φzに処理510で計算した区画線の角度φを代入し、一連の処理を終了する。
【0050】
続いて、処理206において、処理205で複数個の区画線の角度を算出する場合に、これら複数の区画線の角度を区画線角度平均化部10により平均する。この具体的な方法の例として、(イ)相加平均,(ロ)撮像装置の距離分解能に基づいた重み付け平均,(ハ)情報の鮮度に基づいた重み付け平均があり、それぞれの組み合わせとしても良い。以下、(イ)〜(ハ)に関して具体的に説明する。
(イ)相加平均
例えば、区画線の角度がφ1,φ2,φ3,φ4の4個算出された場合は、区画線角度の平均値φaveは(2)式で計算できる。
【0051】
(数2)
φave=(φ1+φ2+φ3+φ4)÷4 (2)
(ロ)撮像装置の距離分解能に基づいた重み付け平均
撮像装置の特性として、画像上で撮像装置から遠くなればなるほど距離分解能が低下する。例えば、区画線の角度がφ1,φ2,φ3,φ4の4個算出された場合、それぞれが算出された場所の水平方向の距離分解能が1cm,2cm,3cm,4cmであれば、その逆数(1,1/2,1/3,1/4)を重みとして区画線角度の平均値φaveを(3)式のように計算する。
【0052】
(数3)
φave=(1×φ1+1/2×φ2+1/3×φ3+1/4×φ4)÷(1+1
/2+1/3+1/4) (3)
(ハ)情報の鮮度に基づいた重み付け平均
処理501および処理502の判定結果がNOの場合は区画線角度の変化率を用いて現在の区画線の角度を予測するが、処理506によりインクリメントされる不検知カウンタが大きくなればなるほど予測による誤差が蓄積する。つまり、不検知カウンタが大きいほど情報の鮮度が落ちることになるため、不検知カウンタの値に基づいた重み付け平均が有効である。例えば、区画線の角度がφ1,φ2,φ3,φ4の4個算出された場合、それぞれの不検知カウンタが0,1,2,3であれば、所定の値(例えば20)から不検知カウンタの値を引いた数(20,19,18,17)を重みとして区画線角度の平均値φaveを(4)式のように計算する。ただし、重みが1以下になる場合は1に置き換える。
【0053】
(数4)
φave=(20×φ1+19×φ2+18×φ3+17×φ4)÷(20+19
+18+17) (4)
また、(ロ)と(ハ)を組み合わせる場合は、それぞれ求めた重みを掛け合わせて平均してもよいし、個別に求めた後に相加平均してもよい。
【0054】
最後に、処理207において、処理206で算出した区画線の角度を用いて車線に対する車両のヨー角を車両ヨー角算出部11により算出し、一連の処理を終了する。車両が道路の車線内を走行中には、処理202により2本の区画線が検出され、処理206により2本の区画線の角度が算出されるため、この2本の区画線の角度を用いて車線に対する車両のヨー角を算出する。基本的には、2本の区画線の角度を平均することで車両のヨー角を算出するが、2本の区画線の角度を重みを付けて平均してもよい。なお、1本の区画線のみの検出の場合にはその区画線の角度を車両のヨー角とする。また、処理205では過去の情報を利用して区画線の角度を算出するため、車両のヨー角に時間遅れが生じる可能性がある。そこで、ヨー角記憶部12で車両のヨー角を過去にさかのぼって記憶し、記憶した過去複数個の車両のヨー角を用いてヨー角変化率算出部13により車両のヨー角変化率を算出して、この車両のヨー角変化率を用いて遅れ時間分だけ未来の値を予測する方法もある。これにより、過去の情報を利用することによる遅れ時間を解消することが可能となる。
【0055】
なお、処理202において、所定の時間(例えば、5秒間)もしくは所定の距離(例えば、20m)を走行しても区画線が検出できない場合は、以後の処理203以降の演算を中止して、現在車両のヨー角が演算できないことを報知する構成としてもよい。
【0056】
以上説明したように、過去複数個の区画線までの距離を用いることで、相対的な距離変化から車線に対する車両のヨー角が算出できるため、車両ピッチ角が変化する状況下においても、安定して車線に対する車両のヨー角を求めることが可能となる。また、複数個の区画線までの距離を算出し、それぞれに対して区画線の角度を算出して平均することで、より安定して車線に対する車両のヨー角を求めることが可能となる。
【0057】
次に、本発明の車両姿勢角算出装置の出力を他のシステムに適用する場合の実施形態に関して説明する。
【0058】
図7は、第1の実施形態に係る車両姿勢角算出装置100の出力を車線逸脱警報装置700に適用する場合の車線逸脱警報システムの概略図である。なお、本実施形態における撮像装置1の撮像方向は車両の後方とする。
【0059】
まず、車線逸脱警報装置700の構成と処理内容について説明する。
【0060】
車線逸脱警報装置700は、区画線までの距離補正部701および車線逸脱警報発生部702よって構成され、車線逸脱警報装置700の図示しないコンピュータにプログラミングされ、予め定められた周期で繰り返し実行される。なお、ここでの車線逸脱警報は、JIS規格(JIS D 0804)に対応することを想定している。つまり、車線逸脱警報装置700は車両姿勢角算出装置100から入力された車両のヨー角と、区画線と車載用撮像装置の光軸間の距離と、に基づいて車線逸脱の警報の発生の要否を判断する。
【0061】
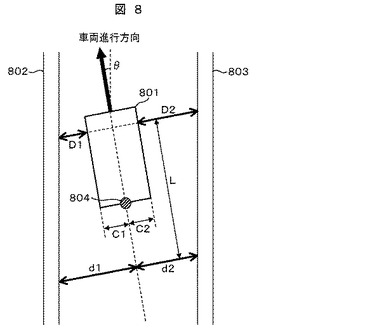
区画線までの距離補正部701は、車両姿勢角算出装置100が算出した車両ヨー角および区画線までの距離を入力し、区画線までの距離を補正する。ここで、JIS規格では、車両前輪の外側と区画線までの距離に基づいて警報を発生するか否かを判定するため、撮像装置1で撮像した車両後方の映像から検出した区画線までの距離を車両前輪の外側から区画線までの距離に補正する必要がある。具体的には、図8を用いて説明する。
【0062】
図8は、車両801が2本の区画線802および803の存在する道路を走行している場合を想定している。
【0063】
車両の後方に設置された撮像装置804で算出された左区画線までの距離d1を車両左前輪の外側から左区画線までの距離D1(補正後の区画線までの距離)に補正するためには、左区画線までの距離d1が算出された地点から車両前輪までの距離L,撮像装置804から車両左前輪の外側までの距離C1、および車両ヨー角θを用いると(5)式で計算できる。
【0064】
(数5)
D1=d1−L×tanθ−C1 (5)
同様に、車両の後方に設置された撮像装置804で算出された右区画線までの距離d2を車両右前輪の外側から右区画線までの距離D2(補正後の区画線までの距離)に補正するためには、右区画線までの距離d2が算出された地点から車両前輪までの距離L、撮像装置804から車両右前輪の外側までの距離C2、および車両ヨー角θを用いると(6)式で計算できる。
【0065】
(数6)
D2=d2+L×tanθ−C2 (6)
車線逸脱警報発生部702は、区画線までの距離補正部701で補正された左右の区画線までの距離D1,D2を用いて車両が車線を逸脱する(もしくは、逸脱しそうな)場合に乗員に対して警報を発生する。つまり、車両前輪の外側から左車線までの距離と、車両前輪の外側から右車線までの距離の、どちらか一方が予め定めた距離以下となった場合は、車線逸脱警報を発生するフラグを立てる。なお、警報の方法としては、スピーカーからの音声でもよいし、ディスプレイに表示する方式でもよい。具体的な一手法としては、補正後の区画線までの距離D1またはD2が所定の範囲内(例えば、5cm以内)になった場合に警報を発生する。なお、警報を解除するタイミングは警報を発生して所定時間経過後(例えば、2秒後)とする方法がある。
【0066】
次に、図9を用いて、車両姿勢角算出装置100および車線逸脱警報装置700の一連の処理内容を実際の道路状況に当てはめて説明する。
【0067】
図9は、片側2車線の道路において、車両900が左車線を走行中に点線901で示す軌跡で右車線に逸脱しそうになった後に再度左車線に復帰する場合を想定している。なお、道路境界の区画線は実線で、車線境界の区画線は破線でペイントされているものとし、車両の左側の区画線までの距離をd1,車両の右側の区画線までの距離をd2,補正後の車両左側の区画線までの距離をD1,補正後の車両右側の区画線までの距離をD2とする。また、車両に搭載する撮像装置は車両後方を撮像するものとする。
【0068】
まず、区画線までの距離d1およびd2は、それぞれ実線911および点線912のように算出される。ここで、地点A〜Bおよび地点D〜Eは車両右側の区画線が破線のために検出できない区間のため、点線912の区画線までの距離d2の値が不定となっている。
【0069】
次に、区画線の角度θ1(車両左側の区画線の角度)およびθ2(車両右側の区画線の角度)は、それぞれ区画線までの距離d1およびd2の時系列データを用いて実線913および点線914のように算出される。区画線の角度θ1に関しては、区画線までの距離d1が連続的に算出できているので、あらかじめ記憶してある過去複数点の区画線までの距離d1を用いて算出する。一方、区画線の角度θ2に関しては、区画線までの距離d2が不連続な値となるため、連続的に区画線までの距離が算出できている区間での区画線の角度変化率を算出して区画線までの距離が算出できない区間での区画線の角度を予測する。このため、区画線までの距離が算出できない区間での区画線の角度に誤差が蓄積して、915で囲んだ部分において値がジャンプする場合がある。
【0070】
次に、車両のヨー角は、区画線の角度θ1およびθ2を用いて実線916のように算出される。ここで、車両ヨー角の符号は左旋回をプラス方向と定義するため、区画線の角度θ1の符号を逆転したものと区画線の角度θ2を平均して車両ヨー角を算出する。なお、915で囲んだ部分と同様に、区画線までの距離が算出できない区間では区画線の角度に誤差が生じる場合があり、そのため917で囲んだ部分のように値がジャンプする場合がある。
【0071】
次に、補正後の区画線までの距離D1およびD2は、区画線までの距離d1およびd2と車両ヨー角を用いて(5)式および(6)式でそれぞれ実線918および点線919のように算出する。
【0072】
次に、車線逸脱警報フラグは、補正後の区画線までの距離D1もしくはD2が所定の値以下となった場合に1(ON)を設定する。ここでは、補正後の区画線までの距離D2が地点Cにおいて所定値を下回ったときに車線逸脱警報フラグをONして所定時間後にOFF(0に設定)している。これは、運転手が警報を認知する時間(例えば、2秒間)だけ車線逸脱警報フラグをONすればよく、OFFする際に補正後の区画線までの距離D2が所定値を下回っていてもそのままOFFする(警報し続けると運転手が煩わしさを感じるため)。車線逸脱警報フラグの一連の値の変化は実線920のようになる。
【0073】
以上説明したように、車両後方を撮像した画像から区画線を検出して車両ヨー角を算出し、算出した車両ヨー角を用いて区画線までの距離を補正して車線逸脱警報フラグを設定することが可能となる。
【0074】
なお、本実施例においては、車両後方を撮像する撮像装置を用いて説明したが、車両前方を撮像する撮像装置でもよく、また、撮像装置の取付角度や取付位置が本実施例と異なっていてもよい。
【0075】
また、本実施例においては、区画線の角度の算出方法に最小二乗法を用いたが、最小二乗法以外の方法を用いてもよい。
【0076】
さらに、本実施例においては、撮像装置で算出された区画線までの距離を車両前輪の外側から区画線までの距離に補正すると説明したが、車両前方の角から区画線までの距離に補正するなど、任意の場所における区画線までの距離に補正してもよい。
【0077】
以上のように、本発明の趣旨を逸脱しない範囲において、種々の様態で実施することができる。
【符号の説明】
【0078】
100 車両姿勢角算出装置
301,302,401,402,802,803 区画線
303〜306 エッジ強度のピーク
403 撮像装置の光軸
404 区画線までの距離
405,804 撮像装置
801,900 車両
901 走行軌跡
【技術分野】
【0001】
本発明は、車載カメラを用いて車両が走行している車線に対する車両の姿勢角を算出する方法に関する。
【背景技術】
【0002】
車載カメラにより車両の周囲を撮像し、撮像した画像中の物体(車両,歩行者など)や道路標示・標識(区画線などの路面ペイント,止まれなどの標識など)を認識するための技術が種々提案されている。例えば、車載カメラで道路上にペイントが施されている区画線を認識し、車線内の車両位置を求めることができれば、車両が車線から逸脱するときに運転者に警報を発したり、ステアリングやブレーキを制御したりして逸脱を抑制することが可能となる。
【0003】
このように車両が車線を逸脱するときに警報を発するシステムとして、JIS(日本工業規格)のJIS D 0804で規格化されている車線逸脱警報システム(LDWS:Lane Departure Warning Systems)がある。この規格をとくに車両の後方を撮像し、撮像した画像中の区画線を認識する車載カメラを用いて実現する場合、車両後方で認識した区画線の情報を車両前輪位置に補正する必要があるため、この補正の際に利用する情報として車線に対する車両のヨー角を正確に求める必要がある。
【0004】
例えば、特許文献1には、車載カメラにて撮像される画面内において2本の道路平行線が交わって消失する点である道路消失点を求め、この2本の道路平行線と道路消失点に基づいて車載カメラの姿勢パラメータ(姿勢角(ヨー角))を算出する装置が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平7−147000号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1においては、走行中の道路が直線かつ平坦の場合でないと道路消失点を求めることは困難であり、また、道路消失点を求めても車両ピッチ角の変化(乗車人数の変化や燃料消費などによる)などにより道路消失点と道路平行線の関係が変わるため、車線に対する車両ヨー角に誤差が発生する問題がある。
【0007】
本発明の目的は、車両ピッチ角が変化する状況下においても、道路消失点の情報を使わずに安定して車線に対する車両のヨー角を求めることのできる車両姿勢角算出装置を提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明は、車載用撮像装置から取り込んだ車外を撮像した画像情報から区画線を検出する区画線検出部と、区画線と車載用撮像装置の光軸間の距離を所定の処理周期毎に算出する距離算出部と、算出された区画線と車載用撮像装置の光軸間の距離と所定の処理周期の間に車両が進行した車両進行距離に基づいて区画線の角度を算出する車両角度算出部と、を有する構成とする。
【発明の効果】
【0009】
本発明によれば、車両ピッチ角が変化する状況下においても、道路消失点の情報を使わずに安定して車線に対する車両のヨー角を求めることのできる車両姿勢角算出装置を提供できる。
【図面の簡単な説明】
【0010】
【図1】本発明に係る車両姿勢角算出装置の第1の実施形態の概略図である。
【図2】本発明に係る車両姿勢角算出装置の処理内容を示すフローチャートを示す図である。
【図3】本発明の区画線検出部の処理内容を示す概略図である。
【図4】本発明の区画線までの距離算出部の処理内容を示す概略図である。
【図5】本発明の区画線角度算出処理の処理内容を示すフローチャートを示す図である。
【図6】本発明の区画線の角度を算出する方法の一例を示す図である。
【図7】本発明に係る車両姿勢角算出装置を用いた車線逸脱警報システムの概略図である。
【図8】本発明の区画線までの距離補正部を説明する概略図である。
【図9】本発明に係る車線逸脱警報システムの処理内容の具体例を示す図である。
【発明を実施するための形態】
【0011】
以下、実施形態について図面を用いて詳細に説明する。
【0012】
図1は、第1の実施形態に係る車両姿勢角算出装置100の概略図である。
【0013】
まず、車両姿勢角算出装置100の構成と処理内容について説明する。
【0014】
車両姿勢角算出装置100は、区画線検出部3,区画線までの距離算出部4,距離記憶部5,区画線角度算出部6,角度記憶部7,角度変化率算出部8,区画線不検知回数計測部9,区画線角度平均化部10,車両ヨー角算出部11,ヨー角記憶部12,ヨー角変化率算出部13によって構成され、車両姿勢角算出装置100の図示しないコンピュータにプログラミングされ、予め定められた周期で繰り返し実行される。
【0015】
また、車両姿勢角算出装置100は、撮像装置1により撮像された画像を入力し、さらに、車速検出部2により検出された車速を入力して、車線に対する車両のヨー角などを外部に出力する構成となっている。
【0016】
撮像装置1は、CCD(Charge Coupled Device)イメージセンサやCMOS(Complementary Metal Oxide Semiconductor)イメージセンサなどの撮像素子によって自車外を撮像し、得られた画像をデジタル処理してコンピュータで扱える画像データに変換する。
【0017】
車速検出部2は、車両が進行する速度を検出するものであり、車両の前後左右各輪に装着された車輪速センサにより得られる値を平均して車速を検出する方法や、自車に搭載する加速度センサにより得られる自車の加速度の値を積分して車速を算出する方法などがある。
【0018】
区画線検出部3は、車載用の撮像装置1により取得した車外を撮像した画像データ(画像情報)を用いて道路上にペイントされている区画線(自車の左右にある一対の左右線など),車道外側線など)を検出する。
【0019】
区画線までの距離算出部4は、区画線検出部3で検出された区画線と撮像装置1の光軸との距離(区画線までの距離)を算出する。この算出は、所定の処理周期で複数回算出する。
【0020】
距離記憶部5は、区画線までの距離算出部4で算出された区画線までの距離を過去複数個記憶する。なお、その記憶媒体としては、コンピュータ内部のRAM(Random Access Memory)が一般的である。
【0021】
区画線角度算出部6は、角度記憶部7,角度変化率算出部8,区画線不検知回数計測部9によって構成され、距離記憶部5に記憶されている過去複数個の区画線までの距離と、検出した車両速度(又は車両速度から求められた演算周期間に車両が進行した車両進行距離)と、を用いて区画線の角度を算出する。
【0022】
角度記憶部7は、区画線角度算出部6で算出された区画線の角度を過去複数個記憶する部分であり、その記憶媒体としては、距離記憶部5と同様にコンピュータ内部のRAMが一般的である。
【0023】
角度変化率算出部8は、角度記憶部7に記憶されている過去複数個の区画線の角度を用いて区画線の角度変化率を算出する。
【0024】
区画線不検知回数計測部9は、区画線までの距離算出部4において区画線までの距離が連続して算出できなかった回数(不検知カウンタ)を計測する。
【0025】
区画線角度平均化部10は、区画線までの距離算出部4において複数個の区画線までの距離を算出した場合、区画線角度算出部6で算出される区画線の角度も複数個となるため、この複数個の区画線の角度を平均する。なお、区画線までの距離算出部4において1本の区画線につき1個の区画線までの距離しか算出しない場合は、区画線角度平均化部10による平均する処理は行わずにそのままの値を出力する。
【0026】
車両ヨー角算出部11は、算出された区画線の角度に基づいて区画線に対する車両のヨー角を算出する。具体的には、区画線角度平均化部10により平均された区画線の角度を車線に対する車両のヨー角に変換する。また、車両のヨー角の変化率を用いて現在の車両のヨー角を予測する。
【0027】
ヨー角記憶部12は、車両ヨー角算出部11で算出された車両のヨー角を過去複数個記憶する部分であり、その記憶媒体としては、距離記憶部5および角度記憶部7と同様にコンピュータ内部のRAMが一般的である。
【0028】
ヨー角変化率算出部13は、ヨー角記憶部12に記憶されている過去複数個の車両のヨー角を用いて車両のヨー角の変化率を算出する。
【0029】
なお、区画線角度算出部6と、区画線角度平均化部10と、車両ヨー角算出部11と、を車両角度算出部とし、車両角度算出部の出力は、車両のヨー角となる。ただ条件によっては、区画線角度算出部6で算出される区画線の角度と、車両ヨー角算出部11で算出される車両のヨー角とが同じ場合もある。そのときは、区画線の角度がそのまま車両のヨー角として車両角度算出部から出力される。
【0030】
次に、車両姿勢角算出装置全体の処理内容について説明する。
【0031】
図2は、車両姿勢角算出装置100の処理内容を示すフローチャートである。
【0032】
まず、処理201において、撮像装置1により撮像した画像をデジタル処理して画像データとして取り込む。
【0033】
次に、処理202において、処理201で取り込んだ画像データから道路上にペイントされている区画線を区画線検出部3により検出する。この区画線を検出する処理について具体的な方法を図3を用いて説明する。図3(a)は、処理201で取り込んだ画像データであり、2本の区画線301および302が存在している。この区画線を検出するための一手法として、画像内のエッジ強度を計算して区画線を抽出する方法がある。ここで、エッジとは画像中で輝度値が急激に変わる点である。図3(b)は図3(a)のAからBに向かってエッジ強度を検出した結果であり、303および305のピークはそれぞれ道路から区画線に変わる点(輝度値が暗から明に急変する点)であり、304および305のピークはそれぞれ区画線から道路に変わる点(輝度値が明から暗に急変する点)である。このように、303と304の組み合わせ,305と306の組み合わせを見つけることで区画線の検出が可能である。
【0034】
次に、処理203において、処理202で検出した区画線と撮像装置1の光軸との距離(区画線までの距離)を区画線までの距離算出部4により算出する。この区画線までの距離を算出する処理について具体的な方法を図4を用いて説明する。図4(a)は、図3(a)と同様に、処理201で取り込んだ画像データであり、図4(b)は、図4(a)と同じ状況時の上部から見た平面図である。ここでは、2本の区画線401および402が存在しており、矢印403は撮像装置1の光軸,405は撮像装置1である。例えば、区画線402までの距離は矢印404で示すように、光軸403から区画線402のA点までの距離であり、図4(a)上でのA点の座標をエッジ強度のピークから求めて図4(b)の実際の座標系に変換して距離を算出する。なお、区画線までの距離は区画線内側の座標を用いるのではなく、区画線外側もしくは区画線中心の座標を用いてもよく、一貫して同じ定義であれば良い。また、区画線までの距離は画像内の各区画線に対して1つずつではなく、各区画線に対して複数個(例えば、10個)算出する構成としても良い。
【0035】
次に、処理204において、処理203で算出した区画線までの距離や、検出した車両速度や、演算周期間に車両が進行した車両進行距離を距離記憶部5によりコンピュータ内部のRAMに記憶する。ここでは、過去複数回(例えば、過去10回分)の処理結果を記憶するものとする。なお、処理203において複数個の区画線までの距離を算出する構成の場合は、複数個それぞれを過去複数回分記憶するものとする。
【0036】
次に、処理205において、処理204で記憶してある過去複数個の区画線までの距離を用いて区画線の角度を区画線角度算出部6により算出する。具体的な処理内容を図5のフローチャートを用いて説明する。なお、処理203において複数個の区画線までの距離を算出する構成の場合は、複数個それぞれに対して区画線の角度を算出するものとする。
【0037】
まず、処理501において、処理204で記憶してある過去複数個の区画線までの距離のうち、最新の区画線までの距離が有効であるか否か、つまり最新の距離が算出できているか否かを判定し、最新の区画線までの距離が有効である場合は処理502に進み、最新の区画線までの距離が有効でない場合は処理506にすすむ。ここで、最新の区画線までの距離が有効とは、処理203において区画線までの距離が算出できている場合であり、区画線の種別が破線や点線などで途切れる場合には区画線までの距離が算出できないこともある。
【0038】
処理502において、処理204で記憶してある過去複数個の区画線までの距離のうち、最新値から数えてM点中N点以上(例えば、8点中4点以上)有効であるか否か、つまり、複数の距離が予め定めた第1の所定値以上、算出できているか否かを判定し、M点中N点以上有効である場合(予め定めた数以上、算出できていると判定された場合)は処理503に進み、M点中N点以上有効でない場合は処理506に進む。なお、MやNは、予め定めて記憶装置等に記憶しておく。
【0039】
処理503において、処理502で判定した区画線までの距離の有効値を用いて区画線の角度を算出する。具体例としては、図6に示すように、区画線までの距離の最新値から数えて6点の過去の情報から最小二乗法により回帰直線601を求めて区画線の角度を算出する。なお、このグラフの横軸は位置(演算周期間に車両が進行した距離)となっており、車両速度と演算周期により求める。
【0040】
次に、処理504において、処理503で算出した区画線の角度を角度記憶部7によりコンピュータ内部のRAMに記憶する。
【0041】
次に、処理505において、処理203で区画線までの距離が算出できなかった場合にインクリメントする不検知カウンタをリセットし、処理512において、区画線の角度前回値φzに処理503で計算した区画線の角度φを代入し、一連の処理を終了する。
【0042】
処理506において、処理203で区画線までの距離が算出できなかった場合にインクリメントする不検知カウンタをインクリメントする。
【0043】
次に、処理507において、不検知カウンタが1であるか否かを判定し、不検知カウンタが1の場合は処理508に進み、不検知カウンタが1でない場合は処理510に進む。
【0044】
処理508において、処理504で記憶してある過去複数個の区画線の角度のうち、最新値から数えてP点中Q点以上(例えば、6点中3点以上)有効であるか否か、つまり過去に算出された複数の区画線の角度が予め定めた数以上、算出できているか否かを判定し、P点中Q点以上有効である場合(予め定めた第2の所定値以上、算出できていると判定された場合)は処理509に進み、P点中Q点以上有効でない場合は処理511に進む。なお、PやQは、予め定めて記憶装置等に記憶しておく。
【0045】
処理509において、処理508で判定した区画線の角度の有効値を用いて区画線の角度変化率(区画線の角度を演算周期間に車両が進行した距離で微分した値)を算出する。具体的な方法は図6で説明した方法と同様に、縦軸を区画線の角度に置き換えて最小二乗法等により回帰直線を求めて区画線の角度変化率を算出する。
【0046】
処理511において、区画線の角度変化率を0に設定する。
【0047】
なお、処理509と処理511の違いは、処理508で判定した区画線の角度の有効値の個数で決めており、区画線の角度変化率を算出するうえで所定の個数以上(例えば、3点以上)の区画線の角度がないと区画線の角度変化率の計算結果の信頼度が低くなるためである。
【0048】
次に、処理510において、処理509または処理511で算出した区画線の角度変化率を用いて区画線の角度を予測する。具体的には、区画線の角度φは、後述する区画線の角度前回値φz,区画線の角度変化率α,演算周期Δtを用いて(1)式で計算できる。
【0049】
(数1)
φ=φz+α×Δt (1)
最後に、処理512において、区画線の角度前回値φzに処理510で計算した区画線の角度φを代入し、一連の処理を終了する。
【0050】
続いて、処理206において、処理205で複数個の区画線の角度を算出する場合に、これら複数の区画線の角度を区画線角度平均化部10により平均する。この具体的な方法の例として、(イ)相加平均,(ロ)撮像装置の距離分解能に基づいた重み付け平均,(ハ)情報の鮮度に基づいた重み付け平均があり、それぞれの組み合わせとしても良い。以下、(イ)〜(ハ)に関して具体的に説明する。
(イ)相加平均
例えば、区画線の角度がφ1,φ2,φ3,φ4の4個算出された場合は、区画線角度の平均値φaveは(2)式で計算できる。
【0051】
(数2)
φave=(φ1+φ2+φ3+φ4)÷4 (2)
(ロ)撮像装置の距離分解能に基づいた重み付け平均
撮像装置の特性として、画像上で撮像装置から遠くなればなるほど距離分解能が低下する。例えば、区画線の角度がφ1,φ2,φ3,φ4の4個算出された場合、それぞれが算出された場所の水平方向の距離分解能が1cm,2cm,3cm,4cmであれば、その逆数(1,1/2,1/3,1/4)を重みとして区画線角度の平均値φaveを(3)式のように計算する。
【0052】
(数3)
φave=(1×φ1+1/2×φ2+1/3×φ3+1/4×φ4)÷(1+1
/2+1/3+1/4) (3)
(ハ)情報の鮮度に基づいた重み付け平均
処理501および処理502の判定結果がNOの場合は区画線角度の変化率を用いて現在の区画線の角度を予測するが、処理506によりインクリメントされる不検知カウンタが大きくなればなるほど予測による誤差が蓄積する。つまり、不検知カウンタが大きいほど情報の鮮度が落ちることになるため、不検知カウンタの値に基づいた重み付け平均が有効である。例えば、区画線の角度がφ1,φ2,φ3,φ4の4個算出された場合、それぞれの不検知カウンタが0,1,2,3であれば、所定の値(例えば20)から不検知カウンタの値を引いた数(20,19,18,17)を重みとして区画線角度の平均値φaveを(4)式のように計算する。ただし、重みが1以下になる場合は1に置き換える。
【0053】
(数4)
φave=(20×φ1+19×φ2+18×φ3+17×φ4)÷(20+19
+18+17) (4)
また、(ロ)と(ハ)を組み合わせる場合は、それぞれ求めた重みを掛け合わせて平均してもよいし、個別に求めた後に相加平均してもよい。
【0054】
最後に、処理207において、処理206で算出した区画線の角度を用いて車線に対する車両のヨー角を車両ヨー角算出部11により算出し、一連の処理を終了する。車両が道路の車線内を走行中には、処理202により2本の区画線が検出され、処理206により2本の区画線の角度が算出されるため、この2本の区画線の角度を用いて車線に対する車両のヨー角を算出する。基本的には、2本の区画線の角度を平均することで車両のヨー角を算出するが、2本の区画線の角度を重みを付けて平均してもよい。なお、1本の区画線のみの検出の場合にはその区画線の角度を車両のヨー角とする。また、処理205では過去の情報を利用して区画線の角度を算出するため、車両のヨー角に時間遅れが生じる可能性がある。そこで、ヨー角記憶部12で車両のヨー角を過去にさかのぼって記憶し、記憶した過去複数個の車両のヨー角を用いてヨー角変化率算出部13により車両のヨー角変化率を算出して、この車両のヨー角変化率を用いて遅れ時間分だけ未来の値を予測する方法もある。これにより、過去の情報を利用することによる遅れ時間を解消することが可能となる。
【0055】
なお、処理202において、所定の時間(例えば、5秒間)もしくは所定の距離(例えば、20m)を走行しても区画線が検出できない場合は、以後の処理203以降の演算を中止して、現在車両のヨー角が演算できないことを報知する構成としてもよい。
【0056】
以上説明したように、過去複数個の区画線までの距離を用いることで、相対的な距離変化から車線に対する車両のヨー角が算出できるため、車両ピッチ角が変化する状況下においても、安定して車線に対する車両のヨー角を求めることが可能となる。また、複数個の区画線までの距離を算出し、それぞれに対して区画線の角度を算出して平均することで、より安定して車線に対する車両のヨー角を求めることが可能となる。
【0057】
次に、本発明の車両姿勢角算出装置の出力を他のシステムに適用する場合の実施形態に関して説明する。
【0058】
図7は、第1の実施形態に係る車両姿勢角算出装置100の出力を車線逸脱警報装置700に適用する場合の車線逸脱警報システムの概略図である。なお、本実施形態における撮像装置1の撮像方向は車両の後方とする。
【0059】
まず、車線逸脱警報装置700の構成と処理内容について説明する。
【0060】
車線逸脱警報装置700は、区画線までの距離補正部701および車線逸脱警報発生部702よって構成され、車線逸脱警報装置700の図示しないコンピュータにプログラミングされ、予め定められた周期で繰り返し実行される。なお、ここでの車線逸脱警報は、JIS規格(JIS D 0804)に対応することを想定している。つまり、車線逸脱警報装置700は車両姿勢角算出装置100から入力された車両のヨー角と、区画線と車載用撮像装置の光軸間の距離と、に基づいて車線逸脱の警報の発生の要否を判断する。
【0061】
区画線までの距離補正部701は、車両姿勢角算出装置100が算出した車両ヨー角および区画線までの距離を入力し、区画線までの距離を補正する。ここで、JIS規格では、車両前輪の外側と区画線までの距離に基づいて警報を発生するか否かを判定するため、撮像装置1で撮像した車両後方の映像から検出した区画線までの距離を車両前輪の外側から区画線までの距離に補正する必要がある。具体的には、図8を用いて説明する。
【0062】
図8は、車両801が2本の区画線802および803の存在する道路を走行している場合を想定している。
【0063】
車両の後方に設置された撮像装置804で算出された左区画線までの距離d1を車両左前輪の外側から左区画線までの距離D1(補正後の区画線までの距離)に補正するためには、左区画線までの距離d1が算出された地点から車両前輪までの距離L,撮像装置804から車両左前輪の外側までの距離C1、および車両ヨー角θを用いると(5)式で計算できる。
【0064】
(数5)
D1=d1−L×tanθ−C1 (5)
同様に、車両の後方に設置された撮像装置804で算出された右区画線までの距離d2を車両右前輪の外側から右区画線までの距離D2(補正後の区画線までの距離)に補正するためには、右区画線までの距離d2が算出された地点から車両前輪までの距離L、撮像装置804から車両右前輪の外側までの距離C2、および車両ヨー角θを用いると(6)式で計算できる。
【0065】
(数6)
D2=d2+L×tanθ−C2 (6)
車線逸脱警報発生部702は、区画線までの距離補正部701で補正された左右の区画線までの距離D1,D2を用いて車両が車線を逸脱する(もしくは、逸脱しそうな)場合に乗員に対して警報を発生する。つまり、車両前輪の外側から左車線までの距離と、車両前輪の外側から右車線までの距離の、どちらか一方が予め定めた距離以下となった場合は、車線逸脱警報を発生するフラグを立てる。なお、警報の方法としては、スピーカーからの音声でもよいし、ディスプレイに表示する方式でもよい。具体的な一手法としては、補正後の区画線までの距離D1またはD2が所定の範囲内(例えば、5cm以内)になった場合に警報を発生する。なお、警報を解除するタイミングは警報を発生して所定時間経過後(例えば、2秒後)とする方法がある。
【0066】
次に、図9を用いて、車両姿勢角算出装置100および車線逸脱警報装置700の一連の処理内容を実際の道路状況に当てはめて説明する。
【0067】
図9は、片側2車線の道路において、車両900が左車線を走行中に点線901で示す軌跡で右車線に逸脱しそうになった後に再度左車線に復帰する場合を想定している。なお、道路境界の区画線は実線で、車線境界の区画線は破線でペイントされているものとし、車両の左側の区画線までの距離をd1,車両の右側の区画線までの距離をd2,補正後の車両左側の区画線までの距離をD1,補正後の車両右側の区画線までの距離をD2とする。また、車両に搭載する撮像装置は車両後方を撮像するものとする。
【0068】
まず、区画線までの距離d1およびd2は、それぞれ実線911および点線912のように算出される。ここで、地点A〜Bおよび地点D〜Eは車両右側の区画線が破線のために検出できない区間のため、点線912の区画線までの距離d2の値が不定となっている。
【0069】
次に、区画線の角度θ1(車両左側の区画線の角度)およびθ2(車両右側の区画線の角度)は、それぞれ区画線までの距離d1およびd2の時系列データを用いて実線913および点線914のように算出される。区画線の角度θ1に関しては、区画線までの距離d1が連続的に算出できているので、あらかじめ記憶してある過去複数点の区画線までの距離d1を用いて算出する。一方、区画線の角度θ2に関しては、区画線までの距離d2が不連続な値となるため、連続的に区画線までの距離が算出できている区間での区画線の角度変化率を算出して区画線までの距離が算出できない区間での区画線の角度を予測する。このため、区画線までの距離が算出できない区間での区画線の角度に誤差が蓄積して、915で囲んだ部分において値がジャンプする場合がある。
【0070】
次に、車両のヨー角は、区画線の角度θ1およびθ2を用いて実線916のように算出される。ここで、車両ヨー角の符号は左旋回をプラス方向と定義するため、区画線の角度θ1の符号を逆転したものと区画線の角度θ2を平均して車両ヨー角を算出する。なお、915で囲んだ部分と同様に、区画線までの距離が算出できない区間では区画線の角度に誤差が生じる場合があり、そのため917で囲んだ部分のように値がジャンプする場合がある。
【0071】
次に、補正後の区画線までの距離D1およびD2は、区画線までの距離d1およびd2と車両ヨー角を用いて(5)式および(6)式でそれぞれ実線918および点線919のように算出する。
【0072】
次に、車線逸脱警報フラグは、補正後の区画線までの距離D1もしくはD2が所定の値以下となった場合に1(ON)を設定する。ここでは、補正後の区画線までの距離D2が地点Cにおいて所定値を下回ったときに車線逸脱警報フラグをONして所定時間後にOFF(0に設定)している。これは、運転手が警報を認知する時間(例えば、2秒間)だけ車線逸脱警報フラグをONすればよく、OFFする際に補正後の区画線までの距離D2が所定値を下回っていてもそのままOFFする(警報し続けると運転手が煩わしさを感じるため)。車線逸脱警報フラグの一連の値の変化は実線920のようになる。
【0073】
以上説明したように、車両後方を撮像した画像から区画線を検出して車両ヨー角を算出し、算出した車両ヨー角を用いて区画線までの距離を補正して車線逸脱警報フラグを設定することが可能となる。
【0074】
なお、本実施例においては、車両後方を撮像する撮像装置を用いて説明したが、車両前方を撮像する撮像装置でもよく、また、撮像装置の取付角度や取付位置が本実施例と異なっていてもよい。
【0075】
また、本実施例においては、区画線の角度の算出方法に最小二乗法を用いたが、最小二乗法以外の方法を用いてもよい。
【0076】
さらに、本実施例においては、撮像装置で算出された区画線までの距離を車両前輪の外側から区画線までの距離に補正すると説明したが、車両前方の角から区画線までの距離に補正するなど、任意の場所における区画線までの距離に補正してもよい。
【0077】
以上のように、本発明の趣旨を逸脱しない範囲において、種々の様態で実施することができる。
【符号の説明】
【0078】
100 車両姿勢角算出装置
301,302,401,402,802,803 区画線
303〜306 エッジ強度のピーク
403 撮像装置の光軸
404 区画線までの距離
405,804 撮像装置
801,900 車両
901 走行軌跡
【特許請求の範囲】
【請求項1】
車載用撮像装置から取り込んだ車外を撮像した画像情報から区画線を検出する区画線検出部と、
前記区画線と前記車載用撮像装置の光軸間の距離を所定の処理周期毎に算出する距離算出部と、
算出された前記区画線と前記車載用撮像装置の光軸間の距離と所定の処理周期の間に車両が進行した車両進行距離に基づいて区画線の角度を算出する車両角度算出部と、を有する車両姿勢角算出装置。
【請求項2】
請求項1記載の車両姿勢角算出装置において、
前記車両角度算出部は、算出された前記区画線と前記車載用撮像装置の光軸間の距離と所定の処理周期の間に車両が進行した車両進行距離に基づいて区画線の角度を算出する区画線角度算出部と、算出された区画線の角度に基づいて区画線に対する車両のヨー角を算出する車両ヨー角算出部と、を有する車両姿勢角算出装置。
【請求項3】
請求項1記載の車両姿勢角算出装置において、
前記距離算出部で算出された距離を記憶する距離記憶部を有し、
前記車両角度算出部は、前記距離記憶部から複数の距離を取り込み、前記複数の距離と前記車両進行距離に基づいて区画線の角度を算出する車両姿勢角算出装置。
【請求項4】
請求項2記載の車両姿勢角算出装置において、
前記区画線角度算出部は、
前記区画線角度算出部で算出された過去の区画線の角度が記憶された角度記憶部と、
前記角度記憶部に記憶された複数の区画線の角度に基づいて区画線の角度変化率を算出する角度変化率算出部と、を有する車両姿勢角算出装置。
【請求項5】
請求項1記載の車両姿勢角算出装置において、
前記車両角度算出部は、前記距離算出部で前記区画線と前記車載用撮像装置の光軸間の距離が連続して算出できなかった回数を計測する区画線不検知回数計測部を有する車両姿勢角算出装置。
【請求項6】
請求項1記載の車両姿勢角算出装置において、
前記車両角度算出部で算出された複数の区画線の角度を平均する区画線角度平均化部を有する車両姿勢角算出装置。
【請求項7】
請求項2記載の車両姿勢角算出装置において、
前記車両ヨー角算出部は、
車両ヨー角算出部で算出された過去の複数のヨー角を記憶するヨー角記憶部と、
前記ヨー角記憶部で記憶された複数のヨー角から車両のヨー角の変化率を算出するヨー角変化率算出部と、を有する車両姿勢角算出装置。
【請求項8】
請求項2記載の車両姿勢角算出装置において、
前記区画線角度算出部は、
前記距離算出部にて算出された前記区画線と前記車載用撮像装置の光軸間の最新の距離が算出できているか否かを判定し、
最新の距離が算出できていると判定された場合、前記距離算出部にて算出された前記区画線と前記車載用撮像装置の光軸間の複数の距離が予め定めた第1の所定値以上、算出できているか否かを判定し、
前記第1の所定値以上、算出できていると判定された場合、算出できている複数の距離から区画線の角度を算出する、車両姿勢角算出装置。
【請求項9】
請求項8記載の車両姿勢角算出装置において、
前記区画線角度算出部は、
前記距離算出部にて算出された前記区画線と前記車載用撮像装置の光軸間の最新の距離が算出できていないと判定された場合、又は、前記距離算出部にて算出された前記区画線と前記車載用撮像装置の光軸間の複数の距離が前記第1の所定値以上、算出できていないと判定された場合、過去に算出された複数の区画線の角度が予め定めた第2の所定値以上、算出できているか否かを判定し、
過去に算出された複数の区画線の角度が前記第2の所定値以上、算出できていると判定された場合、算出できている複数の区画線の角度から区画線の角度変化率を算出し、
算出された区画線の角度変化率から区画線の角度を予測する、車両姿勢角算出装置。
【請求項10】
請求項1記載の車両姿勢角算出装置において、
前記区画線は、自車の左右にある一対の左右線であり、
前記区画線と前記車載用撮像装置の光軸間の距離は、前記左線と前記車載用撮像装置の光軸間の距離と、前記右線と前記車載用撮像装置の光軸間の距離を含む車両姿勢角算出装置。
【請求項11】
車載用撮像装置から取り込んだ車外を撮像した画像情報から区画線を検出する区画線検出部と、前記区画線と前記車載用撮像装置の光軸間の距離を所定の処理周期毎に算出する距離算出部と、算出された前記区画線と前記車載用撮像装置の光軸間の距離と所定の処理周期の間に車両が進行した車両進行距離に基づいて区画線の角度を算出する車両角度算出部と、を有する車両姿勢角算出装置と、
前記車両姿勢角算出装置から入力された前記区画線の角度と、前記区画線と前記車載用撮像装置の光軸間の前記距離と、に基づいて車線逸脱の警報の発生の要否を判断する車線逸脱警報装置と、を有する車線逸脱警報システム。
【請求項12】
請求項11記載の車線逸脱警報システムにおいて、
前記車両姿勢角算出装置の前記車両角度算出部は、算出された前記区画線と前記車載用撮像装置の光軸間の距離と所定の処理周期の間に車両が進行した車両進行距離に基づいて区画線の角度を算出する区画線角度算出部と、算出された区画線の角度に基づいて区画線に対する車両のヨー角を算出する車両ヨー角算出部と、を有し、
前記車線逸脱警報装置は、前記車両姿勢角算出装置から入力された前記車両のヨー角と、前記区画線と前記車載用撮像装置の光軸間の前記距離と、に基づいて車線逸脱の警報の発生の要否を判断する車両姿勢角算出装置。
【請求項13】
請求項12記載の車線逸脱警報システムにおいて、
前記車線逸脱警報装置は、
前記区画線と前記車載用撮像装置の光軸間の前記距離を前記車両のヨー角に基づいて、車両前輪の外側から区画線までの距離に補正する区画線までの距離補正部と、
補正された前記区画線までの距離に基づいて車線逸脱の警報の発生の要否を判断する車線逸脱警報発生部と、を有する車線逸脱警報システム。
【請求項14】
請求項13記載の車線逸脱警報システムにおいて、
前記区画線までの距離補正部で補正する前記車両前輪の外側から区画線までの距離は、前記区画線と前記車載用撮像装置の光軸間の前記距離と、前記車両のヨー角と、前記区画線と前記車載用撮像装置の光軸間の前記距離が算出された地点から車両前輪までの距離と、前記車載用撮像装置から車両前輪の外側までの距離と、から算出される車線逸脱警報システム。
【請求項15】
請求項11記載の車線逸脱警報システムにおいて、
前記区画線は、自車の左右にある一対の左右線であり、
前記車両前輪の外側から区画線までの距離は、左の前記車両前輪の外側から前記左線までの距離と、右の前記車両前輪の外側から前記右線までの距離を含む車両姿勢角算出装置。
【請求項16】
請求項15記載の車線逸脱警報システムにおいて、
前記車線逸脱警報発生部は、前記車両前輪の外側から前記左車線までの距離と、前記車両前輪の外側から前記右車線までの距離の、どちらか一方が予め定めた距離以下となった場合は、車線逸脱警報を発生する車線逸脱警報システム。
【請求項17】
請求項11記載の車線逸脱警報システムにおいて、
前記車載用撮像装置から取り込んだ前記画像情報は、車両後方の画像情報である車線逸脱警報システム。
【請求項1】
車載用撮像装置から取り込んだ車外を撮像した画像情報から区画線を検出する区画線検出部と、
前記区画線と前記車載用撮像装置の光軸間の距離を所定の処理周期毎に算出する距離算出部と、
算出された前記区画線と前記車載用撮像装置の光軸間の距離と所定の処理周期の間に車両が進行した車両進行距離に基づいて区画線の角度を算出する車両角度算出部と、を有する車両姿勢角算出装置。
【請求項2】
請求項1記載の車両姿勢角算出装置において、
前記車両角度算出部は、算出された前記区画線と前記車載用撮像装置の光軸間の距離と所定の処理周期の間に車両が進行した車両進行距離に基づいて区画線の角度を算出する区画線角度算出部と、算出された区画線の角度に基づいて区画線に対する車両のヨー角を算出する車両ヨー角算出部と、を有する車両姿勢角算出装置。
【請求項3】
請求項1記載の車両姿勢角算出装置において、
前記距離算出部で算出された距離を記憶する距離記憶部を有し、
前記車両角度算出部は、前記距離記憶部から複数の距離を取り込み、前記複数の距離と前記車両進行距離に基づいて区画線の角度を算出する車両姿勢角算出装置。
【請求項4】
請求項2記載の車両姿勢角算出装置において、
前記区画線角度算出部は、
前記区画線角度算出部で算出された過去の区画線の角度が記憶された角度記憶部と、
前記角度記憶部に記憶された複数の区画線の角度に基づいて区画線の角度変化率を算出する角度変化率算出部と、を有する車両姿勢角算出装置。
【請求項5】
請求項1記載の車両姿勢角算出装置において、
前記車両角度算出部は、前記距離算出部で前記区画線と前記車載用撮像装置の光軸間の距離が連続して算出できなかった回数を計測する区画線不検知回数計測部を有する車両姿勢角算出装置。
【請求項6】
請求項1記載の車両姿勢角算出装置において、
前記車両角度算出部で算出された複数の区画線の角度を平均する区画線角度平均化部を有する車両姿勢角算出装置。
【請求項7】
請求項2記載の車両姿勢角算出装置において、
前記車両ヨー角算出部は、
車両ヨー角算出部で算出された過去の複数のヨー角を記憶するヨー角記憶部と、
前記ヨー角記憶部で記憶された複数のヨー角から車両のヨー角の変化率を算出するヨー角変化率算出部と、を有する車両姿勢角算出装置。
【請求項8】
請求項2記載の車両姿勢角算出装置において、
前記区画線角度算出部は、
前記距離算出部にて算出された前記区画線と前記車載用撮像装置の光軸間の最新の距離が算出できているか否かを判定し、
最新の距離が算出できていると判定された場合、前記距離算出部にて算出された前記区画線と前記車載用撮像装置の光軸間の複数の距離が予め定めた第1の所定値以上、算出できているか否かを判定し、
前記第1の所定値以上、算出できていると判定された場合、算出できている複数の距離から区画線の角度を算出する、車両姿勢角算出装置。
【請求項9】
請求項8記載の車両姿勢角算出装置において、
前記区画線角度算出部は、
前記距離算出部にて算出された前記区画線と前記車載用撮像装置の光軸間の最新の距離が算出できていないと判定された場合、又は、前記距離算出部にて算出された前記区画線と前記車載用撮像装置の光軸間の複数の距離が前記第1の所定値以上、算出できていないと判定された場合、過去に算出された複数の区画線の角度が予め定めた第2の所定値以上、算出できているか否かを判定し、
過去に算出された複数の区画線の角度が前記第2の所定値以上、算出できていると判定された場合、算出できている複数の区画線の角度から区画線の角度変化率を算出し、
算出された区画線の角度変化率から区画線の角度を予測する、車両姿勢角算出装置。
【請求項10】
請求項1記載の車両姿勢角算出装置において、
前記区画線は、自車の左右にある一対の左右線であり、
前記区画線と前記車載用撮像装置の光軸間の距離は、前記左線と前記車載用撮像装置の光軸間の距離と、前記右線と前記車載用撮像装置の光軸間の距離を含む車両姿勢角算出装置。
【請求項11】
車載用撮像装置から取り込んだ車外を撮像した画像情報から区画線を検出する区画線検出部と、前記区画線と前記車載用撮像装置の光軸間の距離を所定の処理周期毎に算出する距離算出部と、算出された前記区画線と前記車載用撮像装置の光軸間の距離と所定の処理周期の間に車両が進行した車両進行距離に基づいて区画線の角度を算出する車両角度算出部と、を有する車両姿勢角算出装置と、
前記車両姿勢角算出装置から入力された前記区画線の角度と、前記区画線と前記車載用撮像装置の光軸間の前記距離と、に基づいて車線逸脱の警報の発生の要否を判断する車線逸脱警報装置と、を有する車線逸脱警報システム。
【請求項12】
請求項11記載の車線逸脱警報システムにおいて、
前記車両姿勢角算出装置の前記車両角度算出部は、算出された前記区画線と前記車載用撮像装置の光軸間の距離と所定の処理周期の間に車両が進行した車両進行距離に基づいて区画線の角度を算出する区画線角度算出部と、算出された区画線の角度に基づいて区画線に対する車両のヨー角を算出する車両ヨー角算出部と、を有し、
前記車線逸脱警報装置は、前記車両姿勢角算出装置から入力された前記車両のヨー角と、前記区画線と前記車載用撮像装置の光軸間の前記距離と、に基づいて車線逸脱の警報の発生の要否を判断する車両姿勢角算出装置。
【請求項13】
請求項12記載の車線逸脱警報システムにおいて、
前記車線逸脱警報装置は、
前記区画線と前記車載用撮像装置の光軸間の前記距離を前記車両のヨー角に基づいて、車両前輪の外側から区画線までの距離に補正する区画線までの距離補正部と、
補正された前記区画線までの距離に基づいて車線逸脱の警報の発生の要否を判断する車線逸脱警報発生部と、を有する車線逸脱警報システム。
【請求項14】
請求項13記載の車線逸脱警報システムにおいて、
前記区画線までの距離補正部で補正する前記車両前輪の外側から区画線までの距離は、前記区画線と前記車載用撮像装置の光軸間の前記距離と、前記車両のヨー角と、前記区画線と前記車載用撮像装置の光軸間の前記距離が算出された地点から車両前輪までの距離と、前記車載用撮像装置から車両前輪の外側までの距離と、から算出される車線逸脱警報システム。
【請求項15】
請求項11記載の車線逸脱警報システムにおいて、
前記区画線は、自車の左右にある一対の左右線であり、
前記車両前輪の外側から区画線までの距離は、左の前記車両前輪の外側から前記左線までの距離と、右の前記車両前輪の外側から前記右線までの距離を含む車両姿勢角算出装置。
【請求項16】
請求項15記載の車線逸脱警報システムにおいて、
前記車線逸脱警報発生部は、前記車両前輪の外側から前記左車線までの距離と、前記車両前輪の外側から前記右車線までの距離の、どちらか一方が予め定めた距離以下となった場合は、車線逸脱警報を発生する車線逸脱警報システム。
【請求項17】
請求項11記載の車線逸脱警報システムにおいて、
前記車載用撮像装置から取り込んだ前記画像情報は、車両後方の画像情報である車線逸脱警報システム。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】

【図8】
【図9】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−192227(P2011−192227A)
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願番号】特願2010−60106(P2010−60106)
【出願日】平成22年3月17日(2010.3.17)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願日】平成22年3月17日(2010.3.17)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]