
車両安定化制御装置
【課題】車両がカーブを安定して通過できないと予測される場合において車両を効果的に減速し得るアンダステア抑制制御を達成する車両安定化制御装置を提供すること。
【解決手段】ナビゲーション装置の地図情報に基づくカーブ形状と、現在の車速とに基づいて、カーブ進入前後において、車両がカーブを安定して通過できる可能性(Fg)が判定される。車両がカーブを適切に通過できると判定された場合(Fg=0)、アンダステア抑制制御の開始しきい値Kjが大きい値(デフォルト値K2)に設定され、且つ、車両のヨー特性が重視されるように各車輪の制動力が配分される第1特性(デフォルト特性Bm**)が選択される。一方、車両がカーブを適切に通過できないと判定された場合(Fg=1)、しきい値Kjが相対的に小さい値(K1)に調整され、且つ、車両の減速特性が重視されるように各車輪の制動力が配分される第2特性(Bg**)が選択される。
【解決手段】ナビゲーション装置の地図情報に基づくカーブ形状と、現在の車速とに基づいて、カーブ進入前後において、車両がカーブを安定して通過できる可能性(Fg)が判定される。車両がカーブを適切に通過できると判定された場合(Fg=0)、アンダステア抑制制御の開始しきい値Kjが大きい値(デフォルト値K2)に設定され、且つ、車両のヨー特性が重視されるように各車輪の制動力が配分される第1特性(デフォルト特性Bm**)が選択される。一方、車両がカーブを適切に通過できないと判定された場合(Fg=1)、しきい値Kjが相対的に小さい値(K1)に調整され、且つ、車両の減速特性が重視されるように各車輪の制動力が配分される第2特性(Bg**)が選択される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の安定化制御装置に関し、特に、車両のアンダステアを抑制するために各車輪の制動力を制御するものに係わる。
【背景技術】
【0002】
従来より、車両がカーブを走行中において、車両のアンダステアの程度がしきい値を超えた場合、車両が減速するように、及び/又は、アンダステアを抑制する方向のヨーモーメントが車両に発生するように各車輪の制動力を制御するアンダステア抑制制御を実行する車両安定化制御装置(アンダステア抑制制御装置)が広く知られている(例えば、特許文献1を参照)。
【特許文献1】特開2004−66940号公報
【発明の開示】
【0003】
アンダステア抑制制御において、「アンダステアの程度に対する各車輪の制動力の特性」(具体的には、上記しきい値そのもの、アンダステアの程度の増加に対する各車輪の制動力の増加態様、車両減速とヨーモーメント付与との優先度合等)は、種々の実験、シミュレーション等を通して、種々の状況を想定した上で決定される。一般には、「アンダステアの程度に対する各車輪の制動力の特性」は、一律の特性(通常特性)に決定される場合が多い。
【0004】
ところで、車両がカーブに進入する前後において、ナビゲーション装置の地図情報に基づくカーブ情報(カーブ形状)を利用すれば、このカーブ形状と現在の車速とに基づいて、車両がカーブを安定して通過できる可能性を判定することができる。
【0005】
この判定により、車両がカーブを安定して通過できない、或いは通過できる可能性が低いことが予め予測できる場合、車両を早期に減速しておくことが好ましい。この減速をアンダステア抑制制御で達成するためには、「アンダステアの程度に対する各車輪に付与される制動力の特性」を、通常特性に代えて、制御がより早期に開始される特性、及び/又は、ヨーモーメント付与に対する車両減速の優先度合がより高い特性に変更されることが好ましいと考えられる。
【0006】
本発明の目的は、車両がカーブを安定して通過できないと予測される場合において車両を効果的に減速し得るアンダステア抑制制御を達成する車両安定化制御装置を提供することにある。
【0007】
本発明に係る車両安定化制御装置は、車両の実際の旋回状態を表す実旋回状態量(Ta,Yr)を取得する実旋回状態量取得手段と、前記実旋回状態量(Ta,Yr)に基づいて前記車両のアンダステアが抑制されるように前記車両の各車輪(WH**)の制動力を制御するための前記各車輪の目標制御量(Bt**)を演算する制御量演算手段と、前記各車輪の目標制御量(Bt**)に基づいて前記各車輪の制動力を制御する制御手段とを備える。
【0008】
本発明に係る車両安定化制御装置は、更に、前記車両の進行方向前方にあるカーブの形状(Rc)を取得するカーブ情報取得手段と、前記車両の速度(Vx)を取得する車速取得手段と、前記カーブ形状(Rc)と前記車両の速度(Vx)とに基づいて、前記車両が前記カーブを安定して通過できる可能性(Fg)を判定するカーブ通過可否判定手段とを備える。この判定は、車両が直線路からカーブに進入する前後(車両がカーブ入口を通過する前後)において実行され得る。
【0009】
ここにおいて、前記カーブ通過可否判定手段は、前記カーブ形状(Rc)と前記車両の速度(Vx)とに基づいて、前記車両に作用する横加速度(Gye)を演算するとともに、前記演算された横加速度(Gye)に基づいて前記車両が前記カーブを安定して通過できる可能性(Fg)を判定するように構成され得る。ここで、横加速度の演算において、「車両の速度」としては、現在の速度が使用され得、「カーブ形状」としては、カーブ内の最小曲率半径が使用され得る。
【0010】
この場合、具体的には、前記カーブ通過可否判定手段は、前記演算された横加速度(Gye)が第1所定値(Gy1)以下の場合、前記車両が前記カーブを安定して通過できる(Fg=0)と判定し、前記演算された横加速度(Gye)が前記第1所定値(Gy1)よりも大きい場合、前記演算された横加速度(Gye)と前記第1所定値(Gy1)との差が大きいほど前記車両が前記カーブを安定して通過できる可能性が低くなるように前記可能性(0<Fg<1)を判定し、前記演算された横加速度(Gye)が前記第1所定値(Gy1)よりも大きい第2所定値(Gy2)以上の場合、前記車両が前記カーブを安定して通過できない(Fg=1)と判定するように構成されることが好適である。
【0011】
また、前記カーブ通過可否判定手段は、前記演算された横加速度(Gye)が第3所定値(Gy3)以下の場合、前記車両が前記カーブを安定して通過できる(Fg=0)と判定し、前記演算された横加速度(Gye)が前記第3所定値(Gy3)よりも大きい場合、前記車両が前記カーブを安定して通過できない(Fg=1)と判定するように構成され得る。
【0012】
また、前記カーブ情報取得手段が前記カーブ形状(Rc)に対応する前記カーブ内の位置(Pc)を取得するように構成される場合においては、車両安定化制御装置が、前記車両の位置(Pvh)を取得する車両位置取得手段と、前記カーブ形状(Rc)に対応する位置(Pc)、前記カーブ形状(Rc)、及び前記車両位置(Pvh)に基づいて、前記車両が前記カーブを安定して通過するための目標車速(Vt)を演算する目標車速演算手段とを備え、前記カーブ通過可否判定手段は、前記目標車速(Vt)と前記車両の速度(Vx)との比較結果に基づいて、前記車両が前記カーブを安定して通過できる可能性(Fg)を判定するように構成され得る。
【0013】
この場合、具体的には、前記カーブ通過可否判定手段は、前記車両の速度(Vx)から前記目標車速(Vt)を減じて得られる車速偏差(ΔV)が第4所定値(V1)以下の場合、前記車両が前記カーブを安定して通過できる(Fg=0)と判定し、前記車速偏差(ΔV)が前記第4所定値(V1)よりも大きい場合、前記車速偏差(ΔV)が大きいほど前記車両が前記カーブを安定して通過できる可能性が低くなるように前記可能性(0<Fg<1)を判定し、前記車速偏差(ΔV)が前記第4所定値(V1)よりも大きい第5所定値(V2)以上の場合、前記車両が前記カーブを安定して通過できない(Fg=1)と判定するように構成されることが好適である。
【0014】
また、前記カーブ通過可否判定手段は、前記車両の速度(Vx)から前記目標車速(Vt)を減じて得られる車速偏差(ΔV)が第6所定値(V3)以下の場合、前記車両が前記カーブを安定して通過できる(Fg=0)と判定し、前記車速偏差(ΔV)が前記第6所定値(V3)よりも大きい場合、前記車両が前記カーブを安定して通過できない(Fg=1)と判定するように構成され得る。
【0015】
本発明に係る車両安定化制御装置の特徴は、前記制御量演算手段が、前記車両が前記カーブを安定して通過できる可能性(Fg)に応じて前記各車輪の目標制御量(Bt**)を調整するように構成されたことにある。これによれば、車両がカーブを安定して通過できない、或いは、通過できる可能性が低いことが予め予測できる場合において、アンダステア抑制制御を利用して、車両を効果的に減速することができる。
【0016】
具体的には、例えば、車両安定化制御装置が、前記車両の操向車輪(WHf*)の舵角に相当する値(θsw,δf)を取得する舵角取得手段と、前記車両の速度(Vx)と前記舵角に相当する値(θsw,δf)とに基づいて前記実旋回状態量(Ta,Yr)に対応する目標旋回状態量(Td,Yrd)を演算する目標旋回状態量演算手段と、前記目標旋回状態量(Td,Yrd)と前記実旋回状態量(Ta,Yr)とを比較することで前記車両のステア特性を表すステア特性値(Sch,ΔYr)を演算するステア特性値演算手段とを備えていて、前記制御量演算手段が、前記ステア特性値(Sch,ΔYr)がしきい値(Kj)以下の場合に前記各車輪の目標制御量(Bt**)をゼロに演算し、前記ステア特性値(Sch,ΔYr)が前記しきい値(Kj)よりも大きい場合に前記各車輪の目標制御量(Bt**)をゼロより大きい値に演算するように構成されている場合において、前記制御量演算手段が、前記車両が前記カーブを安定して通過できる可能性(Fg)が低いほど、前記しきい値(Kj)をより小さい値に設定するように構成されることが好適である。
【0017】
これによれば、車両がカーブを安定して通過できる可能性が低いほど、アンダステア抑制制御が開始され易くなり、従って、アンダステア抑制制御がより早期に開始される。この結果、アンダステア抑制制御を利用して、車両を効果的に減速することができる。
【0018】
或いは、前記制御量演算手段は、前記各車輪の目標制御量(Bt**)の演算について、前記車両の減速よりも前記車両へのヨーモーメントの付与を優先する第1演算特性(Bm**演算特性)と、前記車両へのヨーモーメントの付与よりも前記車両の減速を優先する第2演算特性(Bg**演算特性)とを備えるとともに、前記車両が前記カーブを安定して通過できる可能性(Fg)が高い場合(或いは、安定して通過できると判定された場合)(Fg≦F0)には前記第1演算特性(Bm**演算特性)を使用して前記各車輪の目標制御量(Bt**)を演算し、前記車両が前記カーブを安定して通過できる可能性(Fg)が低い場合(或いは、安定して通過できないと判定された場合)(Fg>F0)には前記第2演算特性(Bg**演算特性)を使用して前記各車輪の目標制御量(Bt**)を演算するように構成されることが好適である。
【0019】
これによれば、車両がカーブを安定して通過できる可能性が低い場合(或いは、安定して通過できない)と判定された場合、ヨーモーメント付与よりも車両減速を優先する特性をもってアンダステア制御が実行される。この結果、アンダステア抑制制御を利用して、車両を効果的に減速することができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明による車両安定化制御装置の実施形態について図面を参照しつつ説明する。
【0021】
(構成)
図1は、本発明の実施形態に係る車両安定化制御装置(以下、「本装置」と称呼する。)を搭載した車両の概略構成を示している。本装置は、車両の動力源であるエンジンEGと、自動変速機TMと、ブレーキアクチュエータBRKと、電子制御ユニットECUと、ナビゲーション装置NAVとを備えている。
【0022】
エンジンEGは、例えば、内燃機関である。即ち、運転者によるアクセルペダル(加速操作部材)APの操作に応じてスロットルアクチュエータTHによりスロットル弁TVの開度が調整される。スロットル弁TVの開度に応じて調整される吸入空気量に応じた量の燃料が燃料噴射アクチュエータFI(インジェクタ)により噴射される。これにより、運転者によるアクセルペダルAPの操作に応じた出力トルクが得られるようになっている。
【0023】
自動変速機TMは、複数の変速段を有する多段自動変速機、或いは、変速段を有さない無段自動変速機である。自動変速機TMは、エンジンEGの運転状態、及びシフトレバー(変速操作部材)SFの位置に応じて、減速比(EG出力軸(=TM入力軸)の回転速度/TM出力軸の回転速度)を自動的に(運転者によるシフトレバーSFの操作によることなく)変更可能となっている。
【0024】
ブレーキアクチュエータBRKは、複数の電磁弁、液圧ポンプ、モータ等を備えた周知の構成を有している。ブレーキアクチュエータBRKは、非制御時では、運転者によるブレーキペダル(制動操作部材)BPの操作に応じた制動圧力(ブレーキ液圧)を車輪WH**のホイールシリンダWC**にそれぞれ供給し、制御時では、ブレーキペダルBPの操作(及びアクセルペダルAPの操作)とは独立してホイールシリンダWC**内の制動圧力を車輪毎に調整できるようになっている。
【0025】
なお、各種記号等の末尾に付された「**」は、各種記号等が何れの車輪に関するものであるかを示していて、「fl」は左前輪、「fr」は右前輪、「rl」は左後輪、「rr」は右後輪を示している。例えば、ホイールシリンダWC**は、左前輪ホイールシリンダWCfl, 右前輪ホイールシリンダWCfr, 左後輪ホイールシリンダWCrl, 右後輪ホイールシリンダWCrrを包括的に示している。
【0026】
本装置は、車輪WH**の車輪速度を検出する車輪速度センサWS**と、ホイールシリンダWC**内の制動圧力を検出する制動圧力センサPW**と、ステアリングホイールSWの(中立位置からの)角度を検出するステアリングホイール角度センサSAと、前輪(操向車輪)の舵角を検出する前輪舵角センサFSと、車体のヨーレイトを検出するヨーレイトセンサYRと、車体前後方向の加速度(減速度)を検出する前後加速度センサGXと、車体横方向の加速度を検出する横加速度センサGYと、エンジンEGの出力軸の回転速度を検出するエンジン回転速度センサNEと、アクセルペダル(加速操作部材)APの操作量を検出する加速操作量センサASと、ブレーキペダルBPの操作量を検出する制動操作量センサBSと、シフトレバーSFの位置を検出するシフト位置センサHSと、スロットル弁TVの開度を検出するスロットル弁開度センサTSと、操舵輪(前輪)のセルフアライニングトルクを検出するセルフアライニングトルクセンサATf*と、ステアリングホイールSWの操舵トルクを検出する操舵トルクセンサSTと、を備えている。
【0027】
セルフアライニングトルクセンサATf*は、例えば、操舵輪のホイールリムに固着されて、ホイールリムの歪を検出することで、この歪に関する情報と歪が検出されたホイールリムの位置とに基づいて、セルフアライニングトルクを検出する。
【0028】
電子制御ユニットECUは、パワートレイン系及びシャシー系を電子制御するマイクロコンピュータである。電子制御ユニットECUは、上述の各種アクチュエータ、上述の各種センサ、及び自動変速機TMと、電気的に接続され、又はネットワークで通信可能となっている。電子制御ユニットECUは、互いに通信バスCBで接続された複数の制御ユニット(ECU1〜ECU4)から構成される。
【0029】
電子制御ユニットECU内のECU1は、車輪ブレーキ制御ユニットであり、車輪速度センサWS**、前後加速度センサGX、横加速度センサGY、ヨーレイトセンサYR等からの信号に基づいてブレーキアクチュエータBRKを制御することで、周知の車両安定化制御(ESC制御)、アンチスキッド制御(ABS制御)、トラクション制御(TCS制御)等の制動圧力制御(車輪ブレーキ制御)を実行するようになっている。また、ECU1は、車輪速度センサWS**の検出結果(車輪速度Vw**)に基づいて車両速度(車速)Vxを演算するようになっている。
【0030】
電子制御ユニットECU内のECU2は、エンジン制御ユニットであり、加速操作量センサAS等からの信号に基づいてスロットルアクチュエータTH及び燃料噴射アクチュエータFIを制御することでエンジンEGの出力トルク制御(エンジン制御)を実行するようになっている。
【0031】
電子制御ユニットECU内のECU3は、自動変速機制御ユニットであり、シフト位置センサHS等からの信号に基づいて自動変速機TMを制御することで減速比制御(変速機制御)を実行するようになっている。
【0032】
電子制御ユニットECU内のECU4は、電動パワーステアリング制御ユニットであり、操舵トルクセンサST等からの信号に基づいて電動パワーステアリング装置EPSを制御することでパワーステアリング制御を実行するようになっている。
【0033】
ナビゲーション装置NAVは、ナビゲーション処理装置PRCを備えていて、ナビゲーション処理装置PRCは、車両位置検出手段(グローバル・ポジショニング・システム)GPS、ヨーレイトジャイロGYR、入力部INP、記憶部MAP、及び表示部(ディスプレー)MTRと電気的に接続されている。ナビゲーション装置NAVは、電子制御ユニットECUと、電気的に接続され、又は無線で通信可能となっている。
【0034】
車両位置検出手段GPSは、人工衛星からの測位信号を利用した周知の手法の一つにより車両の位置(緯度、経度等)を検出可能となっている。ヨーレイトジャイロGYRは、車体の角速度(ヨーレイト)を検出可能となっている。入力部INPは、運転者によるナビゲーション機能に係わる操作を入力するようになっている。記憶部MAPは、地図情報、道路情報等の各種情報を記憶している。
【0035】
ナビゲーション処理装置PRCは、車両位置検出手段GPS、ヨーレイトジャイロGYR、入力部INP、及び記憶部MAPからの信号を総合的に処理し、その処理結果(ナビゲーション機能に係わる情報)を表示部MTRに表示するようになっている。
【0036】
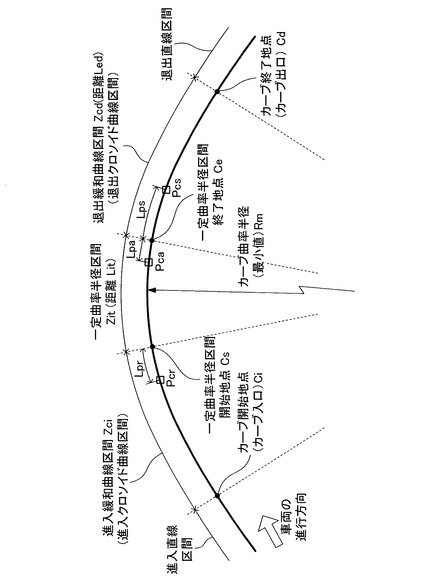
以下、図2に示す形状を有するカーブを想定しながら、上記のように構成された本装置の説明を続ける。図2に示す(1つの)カーブは、カーブ開始地点Ci(カーブ入口)からカーブ終了地点Cd(カーブ出口)に向けて順に、進入緩和曲線区間Zci(車両の進行に伴い曲率半径が徐々に小さくなる)、一定曲率半径区間Zit、及び退出緩和曲線区間Zcd(車両の進行に伴い曲率半径が徐々に大きくなる)から構成されている。緩和曲線は、例えば、クロソイド曲線で構成される。緩和曲線区間が設けられているのは、運転者に急激なステアリングホイール操作を要求することなく、運転者がステアリングホイールを徐々に切り込み、その後徐々に切り戻すことで車両がカーブを円滑に通過できるようにするためである。
【0037】
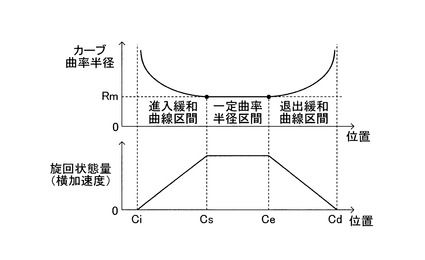
図3に示すように、このカーブでは、曲率半径は、カーブ開始地点Ci(即ち、直線路の終了地点)にて無限大であり、その後、徐々に小さくなり、一定曲率半径区間Zitの開始地点CsでRm(カーブ内の最小曲率半径)となる。その後、曲率半径は、一定曲率半径区間Zitの終了地点CeまでRmに維持された後、徐々に大きくなり、カーブ終了地点Cd(即ち、直線路の開始地点)にて無限大となる。このカーブを一定の車速で車両が走行すると、旋回状態量(例えば、横加速度)は、カーブ開始地点Ciにおいて「0(直線走行)」から増大を開始し、進入緩和曲線区間Zciでは概ね比例的に増加し、一定曲率半径区間Zitでは一定の値(最大値)となる。その後、旋回状態量は、退出緩和曲線区間Zcdにて概ね比例的に減少し、カーブ終了地点Cdにおいて「0(直線走行)」となる。
【0038】
車両が過剰な車速をもってカーブへ進入した場合を考える。運転者はカーブの進入緩和曲線に沿ってステアリングホイール角度を徐々に増大させていく。これにより、車両にアンダステアが発生するとともにアンダステアの程度が増大していく。この結果、車両が進入緩和曲線上をトレースできなくなると、運転者は更にステアリングホイールを切り増して行く。このような状況は、カーブ入口Ciではなく、カーブの一定曲率半径区間Zitの入口Cs付近で発生し易い。
【0039】
(車両安定化制御の概要)
以下、図4を参照しながら、本装置により実行される車両安定化制御の概要について説明する。
【0040】
先ず、実旋回状態量取得手段A1では、実際の車両のヨー運動状態量(実旋回状態量Ta)が取得される。実旋回状態量Taは、車両に対して実際に発生しているヨー運動状態量であり、例えば、実ヨーレイトYr、実横加速度Gy、実車体スリップ角βa、実車体スリップ角速度dβaである。また、実旋回状態量Taとして、これらのうちから2つ以上の状態量を組み合わせて得られる値が使用され得る。
【0041】
目標旋回状態量演算手段A2では、目標とする車両のヨー運動状態量(目標旋回状態量ともいう)Tdが取得される。目標旋回状態量Tdとしては、実旋回状態量Taに対応した同じ次元の値(目標ヨーレイトYrd、目標横加速度Gyd、目標スリップ角βd、目標スリップ角速度dβd)が演算される。目標旋回状態量Tdは、車速Vx及びステアリングホイール角度θsw(或いは、前輪舵角δf)に基づいて演算され得る。
【0042】
ステア特性演算手段A3では、実旋回状態量Taと目標旋回状態量Tdとに基づいて車両のステア特性(アンダステア、ニュートラルステア、オーバステア)が演算され、その演算結果(ステア特性値)Schが演算される。ステア特性値Schは、車両のステア特性の程度を表す値であり、目標旋回状態量Tdと実旋回状態量Taとを比較することで得演算され得る。ステア特性値Schとしては、TdとTaとの偏差(=Td−Ta)が使用され得る。ここで、目標旋回状態量Tdを使用することなくステア特性を演算することができる。例えば、実スリップ角速度dβa、実スリップ角βa等に基づいてステア特性を演算することができる。
【0043】
目標制御量演算手段A4では、ステア特性値Schに基づいて、車両のアンダステア、オーバステアを抑制するための、各車輪に付与される制動力の目標制御量Bt**、動力源(エンジン等)の目標出力Otが演算される。目標制御量演算手段A4では、後述する判定結果Fgに基づいて目標制御量Bt**が調整される。目標制御量演算手段A4には、車両のアンダステアを抑制するアンダステア抑制制御ブロックと、車両のオーバステアを抑制するオーバステア抑制制御ブロックとが含まれる。
【0044】
アンダステア抑制制御ブロックでは、ステア特性値Schに基づいてアンダステア抑制制御を開始する制御開始条件(制御開始しきい値Kj)が設定される。しきい値Kjは、後述するカーブ通過可否判定手段A8による判定結果Fgに基づいて調整される。判定結果Fgが「カーブ通過が可能(判定結果Fgが「0」、或いは、相対的に小さい値)」となった場合、しきい値Kjが大きい値に設定されて、アンダステア抑制制御が開始され難くなる。一方、判定結果Fgが「カーブ通過が不可(判定結果Fgが「1」、或いは、相対的に大きい値)」となった場合、しきい値Kjが小さい値に修正されて、アンダステア抑制制御が小さいステア特性値Schで開始されるように調整される。この結果、アンダステア抑制制御が開始され易くなる。
【0045】
また、目標制御量演算手段A4では、ステア特性値Schに基づいて、目標制御量Bt**の演算について、車両のヨー特性を重視する(減速よりもヨーモーメント付与を優先する)第1特性(目標制御量Bm**を演算する特性)と、車両の減速特性を重視する(ヨーモーメント付与よりも減速を優先する)第2特性(目標制御量Bg**を演算する特性)の2種類の特性が備えられている。
【0046】
第1特性では、旋回内向きに作用するヨーイングモーメントが増大して車両が進行する向きが変わり易くなるように各輪の制動力が配分される。一方、第2特性では、車両の旋回を維持するヨーイングモーメントが確保できる範囲内で各輪の制動力の総和が最大となって車両が十分に減速され得るように各輪の制動力が配分される。
【0047】
後述するカーブ通過可否判定手段A8による判定結果Fgが「カーブ通過可能」となったとき(判定結果Fgが「0」、或いは、相対的に小さい値のとき)、目標制御量Bt**の演算特性として第1特性が選択される。この結果、アンダステア抑制制御が開始された場合において車両のヨー運動特性が向上する。一方、判定結果Fgが「カーブ通過不可」となったとき(判定結果Fgが「1」、或いは、相対的に大きい値のとき)、目標制御量Bt**の演算特性として第2特性が選択される。この結果、アンダステア抑制制御が開始された場合において、車両の減速が優先されて、カーブの旋回半径を維持しつつ最大限の車両減速度が得られる。
【0048】
制御手段A5では、目標制御量演算手段A4により演算された目標制御量に基づいて、動力源の出力が低減され、各車輪の制動力が独立して制御される。具体的には、目標制御量Bt**に基づいて、各車輪の制動力を制御する車輪ブレーキ制御手段A51が制御される。また、目標制御量Otに基づいて、エンジン等の動力源の出力を制御する動力源出力制御手段A52が制御される。
【0049】
カーブ情報取得手段A6では、車両の前方にあるカーブの情報Rc(カーブ形状であり、例えば曲率半径)が取得される。このとき、カーブ曲率半径Rcに併せて、カーブ曲率半径Rcに対応する位置Pcを取得することができる。これらのカーブ情報Rc,Pcは、記憶部MAPの地図データベースに記憶されている。カーブ情報として、位置Pc(例えば、緯度・経度)と、その位置におけるカーブ曲率半径Rcとが直接的に記憶されていてもよいし、これらが演算できる書式が記憶されていてもよい。
【0050】
車速取得手段A7では、車両の速度Vxが取得される。
【0051】
カーブ通過可否判断手段A8では、車両の進行方向前方にあるカーブの形状Rc(特に、カーブの曲率半径)と、車両の速度Vxとに基づいて、車両がカーブを安定して通過できるか否かが判定される。具体的には、カーブの形状(曲率半径)から最小曲率半径Rmが決定され、この最小曲率半径Rmと現在の車速Vxとに基づいて、横加速度Gye(=Vx2/Rm)が演算される。この場合、横加速度Gyeは、車両が対象とされるカーブを車速Vx一定で通過した場合に生ずる横加速度の最大値(計算値)に相当する。
【0052】
横加速度Gyeが所定値(例えば、0.8G)未満の場合、車両はカーブを安定して通過できると判定され得る。一方、横加速度Gyeが前記所定値以上の場合、車両はカーブを安定して通過できないと判定され得る。この所定値として、予め設定された定数を使用することもできるが、路面摩擦係数μmaxに基づいて決定される値を使用することもできる。
【0053】
このカーブ通過可否判定手段A8により、カーブ通過可否の判定値Fgが演算され、この判定値Fgが目標制御量演算手段A4に出力される。判定値Fgは、Fg=0のとき「カーブ通過可能」を表し、Fg=1のときに「カーブ通過不能」を表す。また、判定値Fgは、「0」又は「1」のみではなく、それらの中間の値(0<Fg<1)に演算されることもできる。
【0054】
上述の説明では、カーブの最小曲率半径Rmと実際の車速Vxとから演算される、「カーブを通過できたならば車両に作用するであろう最大横加速度Gye」に基づいてカーブ通過可否判定が行われる。以下に述べるように、この方法とは異なる方法によってカーブ通過の可否を判定することができる。
【0055】
即ち、車両の位置Pvhを取得する車両位置取得手段A9が設けられる。これにより、車両位置Pvhが取得される。車両位置Pvhは、グローバル・ポジショニング・システムGPSを用いて検出される。
【0056】
この場合、カーブ情報取得手段A6では、カーブ形状Rcと、そのカーブ形状Rcに対応したカーブ内の位置Pcが取得される。カーブ形状Rc、カーブ位置Pc、及び、取得された車両位置Pvhに基づいて目標車速Vtが演算される。具体的には、カーブ情報Rc,Pcに基づいてカーブを安定して通過するための適正車速Vqが演算され、この適正車速Vqと車両位置Pvhとに基づいて、現在の車両位置Pvhにおける目標車速Vtが演算される。目標車速Vtと車速Vxとが比較され、この比較結果に基づいて、車両がカーブを安定して通過できるか否かが判定される。
【0057】
車両位置Pvhにおいて、車速Vxが目標車速Vt以下の場合、車両はカーブを安定して通過できると判定され得る。一方、車速Vxが目標車速Vtを超過している場合、車両はカーブを安定して通過できないと判定され得る。この場合も前述と同様、カーブ通過可否判定手段A8により、カーブ通過可否の判定値Fgが演算され、この判定値Fgが目標制御量演算手段A4に出力される。判定値Fgは、Fg=0のとき「カーブ通過可能」を表し、Fg=1のときに「カーブ通過不能」を表す。また、判定値Fgは、「0」又は「1」のみではなく、それらの中間の値(0<Fg<1)に演算されることもできる。
【0058】
(カーブ通過可否の判定値Fgの演算の一例)
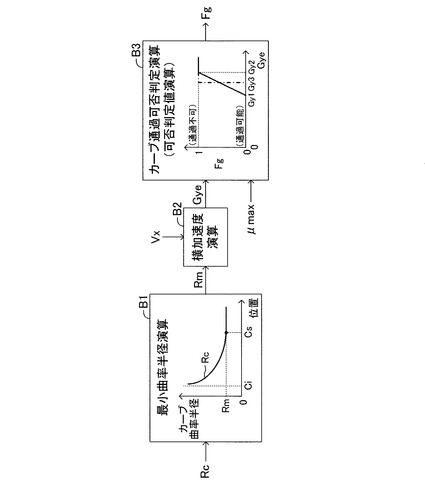
次に、図5を参照しながら、カーブ通過可否判定手段A8によるカーブ通過可否の判定値Fgの演算の一例について詳細に説明する。図5は、前述の横加速度Gyeを使用して判定値Fgが演算される場合の一例を示す。
【0059】
最小曲率半径演算ブロックB1では、車両の進行方向前方にあるカーブ形状(カーブ曲率半径)Rcに基づいて、カーブの最小曲率半径Rmが演算される。
【0060】
横加速度演算ブロックB2では、最小曲率半径(一定曲率半径一定区間Zitの曲率半径)Rm、及び、現在の車速Vxに基づいて、以下の式を用いて、横加速度Gyeが演算される。ここで、横加速度Gyeは、車両が現在の車速Vx一定でカーブを通過できたならば車両に作用するであろう横加速度の最大値である。
Gye=Vx2/Rm
【0061】
カーブ通過可否判定演算ブロックB3では、車両がカーブを安定して通過可能か否かを表す判定値Fgが、横加速度Gyeに基づいて演算される。具体的には、横加速度Gyeが所定値Gy1以下の場合、車両がカーブを安定して通過できることを表すFg=0が演算される。横加速度Gyeが所定値Gy1より大きく且つ所定値Gy2未満の場合、横加速度GyeのGy1からの増加に従って判定値Fgが「0」から増加するように判定値Fgが演算される。横加速度Gyeが所定値Gy2以上の場合、車両がカーブを安定して通過できないことを表すFg=1が演算される。判定値Fgが「0」より大きく「1」未満の場合、車両がカーブを安定して通過できる(通過できない)可能性の程度を表す。具体的には、判定値Fgが大きいほど(「1」に近いほど)カーブ通過の可能性が低く、判定値Fgが小さいほど(「0」に近いほど)カーブ通過の可能性が高いことを表す。
【0062】
また、図中の一転鎖線で示すように、判定値Fgは、横加速度Gyeが所定値Gy3以下の場合にFg=0(カーブ通過可能)に、横加速度Gyeが所定値Gy3より大きい場合にFg=1(カーブ通過不可)になるように演算され得る。
【0063】
車両がタイヤと路面との摩擦係数に基づいて決定される横加速度を超えた横加速度をもって旋回することは物理的に不可能である。このため、所定値Gy1、或いは、Gy3は、タイヤと路面との摩擦係数を考慮して、0.8G程度に設定され得る。また、路面摩擦係数μmaxを演算して、これに基づいて所定値Gy1、Gy2、Gy3を調整することができる。路面摩擦係数μmaxが小さい値に演算される場合、所定値Gy1、Gy2、Gy3が相対的に小さい値に調整され、路面摩擦係数μmaxが大きい値に演算される場合、所定値Gy1、Gy2、Gy3が相対的に大きい値に調整され得る。
【0064】
(カーブ通過可否の判定値Fgの演算の他の例)
次に、図6を参照しながら、カーブ通過可否判定手段A8によるカーブ通過可否の判定値Fgの演算の他の例について詳細に説明する。図6は、前述の目標車速Vtを使用して判定値Fgが演算される場合の一例を示す。
【0065】
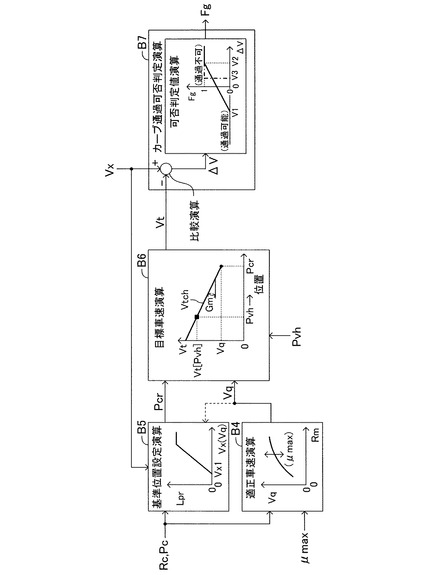
適正車速演算ブロックB4では、上述のカーブ情報Rc,Pc(カーブ形状(カーブの曲率半径)Rcと、これに対応するカーブの位置Pc)に基づいて、車両がカーブを安定して通過するための適正車速Vqが演算される。カーブ情報Rc,Pcに基づいて、カーブ内の曲率半径が一定となる区間(一定曲率半径区間Zit)の曲率半径Rmが決定される。この曲率半径Rmに基づいて適正車速Vqが演算される。曲率半径Rmとして、カーブ内の最小曲率半径が使用されてもよい。カーブ曲率半径Rmが大きいほど適正車速Vqがより大きい値に演算され、曲率半径Rmが小さいほど適正車速Vqがより小さい値に演算される。
【0066】
更に、適正車速Vqは登降坂勾配Kud、道幅(幅員)Wrd、前方の見通しMsk、及び、車速Vxのうちの少なくとも1つ以上に基づいて調整することができる。登降坂勾配Kudが、降り坂のときには平坦路の場合に比較して適正車速Vqが小さく調整され、登り坂のときは平坦路の場合に比較して適正車速Vqが大きく調整される。道幅Wrdが狭い場合には、広い場合に比較して適正車速Vqが小さく調整され、道幅Wrdが広い場合には、狭い場合に比較して適正車速Vqが大きく調整される。前方の見通しMskが悪い場合には、良い場合に比較して適正車速Vqが小さく調整され、前方の見通しMskが良い場合には、悪い場合に比較して適正車速Vqが大きく調整される。車速Vxが高い場合には、低い場合に比較して適正車速Vqが小さく調整され、車速Vxが低い場合には、高い場合に比較して適正車速Vqが大きく調整される。
【0067】
路面摩擦係数μmaxに基づいて、適正車速Vqを調整することもできる。路面摩擦係数μmaxが大きいときには適正車速Vqが大きい値に調整され、路面摩擦係数μmaxが小さいときには適正車速Vqが小さい値に調整される。
【0068】
基準位置設定演算ブロックB5では、基準地点Pcrが決定される。基準地点Pcrは、車両がカーブを適正に通過できるか否かの判定の基準となる地点であり、車速が適正車速Vqまで減少すべき目標となる地点である。基準地点Pcrは、カーブ内の曲率半径が一定となる入口地点Cs(一定曲率半径区間Zitにおける車両に最も近い地点)に設定することができる。また、カーブ内の曲率半径が最小となる地点Csを、基準地点Pcrとして設定することができる。地点Csは、カーブ形状Rc、及び、カーブ位置Pcに基づいて決定される。
【0069】
地点Pcrは、一定曲率半径区間の入口地点Cs、或いは、曲率半径最小地点よりも距離Lprだけ車両に近い地点(車両に近い側のカーブへの進入部に当たる緩和曲線の終了部付近)に設定することができる。距離Lprは一定値とすることができる。
【0070】
また、距離Lprは車速Vxに応じて演算することができる。具体的には、車速Vxが所定値Vx1以下では距離Lprが「0」とされ(即ち、地点PcrがCsと一致し)、Vx>Vx1(所定値)では、車速VxのVx1からの増加に従って距離Lprが「0」から増大するように距離Lprが決定され得る。ここで、車速Vxを適正車速Vqに置き換えて、適正車速Vqに基づいて距離Lprを決定することができる。
【0071】
この場合、地点Pcrは、地点Csから距離Lprだけカーブ開始地点Ciに近いカーブ上の地点に設定される。即ち、地点Pcrは、距離Lpr、カーブ形状Rc、及び、地点Cs(カーブ位置Pc)に基づいて設定される。
【0072】
上述のように、地点Pcrは車速が適正車速Vqまで減少すべき目標とされる地点である。ここで、地図情報等には誤差が含まれる場合がある。上記のように地点Pcrを地点Csよりもカーブ入口Ciに距離Lprだけ近い地点に設定することで、その誤差が吸収され得る。
【0073】
目標車速演算ブロックB6では、目標車速Vtが演算される。具体的には、先ず、基準地点Pcr、及び、適正車速Vqに基づいて、車両位置Pvhにおける目標車速Vt(Vt[Pvh])を演算するための目標車速演算特性Vtchが決定される。この目標車速演算特性Vtchとしては、カーブ入口側から基準地点Pcrまで車速が減速度Gm(例えば、予め設定された定数)をもって減少していき、基準地点Pcrで車速が適正車速Vqとなる特性が採用される。
【0074】
減速度Gmは、路面摩擦係数μmaxに基づいて調整することができる。具体的には、路面摩擦係数μmaxが大きいときには減速度Gmが大きい値に調整され、路面摩擦係数μmaxが小さいときには減速度Gmが小さい値に調整される。そして、基準地点Pcr、及び、適正車速Vqに基づいて決定された目標車速演算特性Vtchに、車両位置取得手段(グローバル・ポジショニング・システムGPS)によって取得された車両位置Pvhを入力することで、車両位置Pvhにおける目標車速Vtが演算される。
【0075】
カーブ通過可否判定演算ブロックB7では、車両が前方のカーブを安定して通過可能か否かを表す判定値Fgが演算する。具体的には、車速取得手段A7により取得された車速Vxと目標車速Vtとが比較され、この車速偏差ΔV(=Vx−Vt)に基づいて判定値Fgが演算される。
【0076】
車速偏差ΔVが所定値V1以下の場合、車両がカーブを安定して通過できることを表すFg=0が演算される。車速偏差ΔVが所定値V1より大きく且つ所定値V2未満の場合、ΔVのV1からの増加に従って判定値Fgが「0」から増加するように判定値Fgが演算される。車速偏差ΔVが所定値V2以上の場合、車両がカーブを安定して通過できないことを表すFg=1が演算される。判定値Fgが「0」より大きく、「1」未満の場合、車両がカーブを安定して通過できる(通過できない)可能性の程度を表す。具体的には、判定値Fgが大きいほど(「1」に近いほど)カーブ通過の可能性が低く、判定値Fgが小さいほど(「0」に近いほど)カーブ通過の可能性が高いことを表す。
【0077】
また、図中の一転鎖線で表すように、判定値Fgは、車速偏差ΔVが所定値V3以下の場合にFg=0(カーブ通過可能)に、ΔVが所定値V3より大きい場合にFg=1(カーブ通過不可)になるように演算され得る。
【0078】
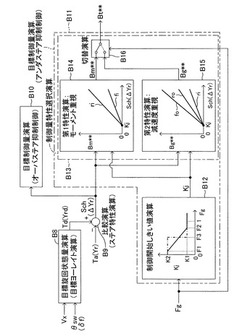
(目標制御量Bt**演算)
次に、図7を参照しながら、目標制御量演算手段A4による目標制御量Bt**の演算の一例について詳細に説明する。
【0079】
目標旋回状態量演算ブロック(目標ヨーレイト演算ブロック、目標旋回状態量演算手段A2に対応)B8では、上述の実旋回状態量Taに対応する同じ次元の目標旋回状態量Tdが演算される。例えば、実旋回状態量TaがヨーレイトセンサYRによって検出された実際のヨーレイトYrである場合、車速Vx、及び、ステアリングホイール角度θsw(或いは、操向車輪の舵角δf)に基づいて目標ヨーレイトYrdが演算される。
【0080】
比較演算ブロック(ステア特性演算ブロック、ステア特性演算手段A3に対応)B9では、目標旋回状態量Tdと実旋回状態量Taとが比較され、ステア特性値Sch(=Td−Ta)が演算される。ステア特性値Schは、車両のステア特性(アンダステア、オーバステア)の程度を表す値である。ステア特性値Schが概ね「0」の場合、車両はニュートラルステアである。Sch<0である場合、車両はオーバステアであり、ステア特性値Schの絶対値が大きいほどオーバステアの程度が大きい。一方、Sch>0である場合、車両はアンダステアであり、ステア特性値Schが大きいほどアンダステアの程度が大きい。
【0081】
例えば、ステア特性値Schがヨーレイトで表される場合、目標ヨーレイトYrdと実ヨーレイトYrとが比較され、車両のステア特性(アンダステア、オーバステア等)を表すヨーレイト偏差ΔYr(=Yrd−Yr)が出力される。ヨーレイト偏差ΔYrが概ね「0」である場合、車両はニュートラルステアである。ΔYr<0である場合、車両はオーバステアであり、ΔYrの絶対値が大きいほどオーバステアの程度が大きい。一方、ΔYr>0である場合、車両はアンダステアであり、ΔYrが大きいほどアンダステアの程度が大きい。
【0082】
車両がオーバステアの場合、ステア特性値Sch(例えば、ヨーレイト偏差ΔYr)は、公知のオーバステア抑制制御の目標制御量演算ブロックB10に入力される。一方、車両がアンダステアの場合、ステア特性値Sch(例えば、ヨーレイト偏差ΔYr)は、本発明に係るアンダステア抑制制御の目標制御量演算ブロックB11に入力される。この目標制御量演算ブロックB11が目標制御量演算手段A4の一部に対応する。
【0083】
アンダステア抑制制御の目標制御量演算ブロックB11内における制御開始しきい値演算ブロックB12では、上述の判定結果(判定値)Fgに基づいて、しきい値Kjが演算される。判定結果Fgが所定値F1(0<F1<1)以下の場合、しきい値Kjが所定値K2に設定される。所定値K2は、デフォルト値(初期値)として通常設定される値である。また、判定結果Fgが所定値F2(F1<F2<1)以上の場合、しきい値Kjが所定値K1(<K2)に演算される。判定結果Fgが所定値F1より大きく且つ所定値F2より小さい場合、判定結果Fgが増加するほどしきい値Kjがより小さい値に演算される。
【0084】
また、図中の一転鎖線で示すように、判定結果Fgが所定値F3以下の場合にKj=K2に、判定結果Fgが所定値F3よりも大きい場合にKj=K1(<K2)になるようにしきい値Kjが演算され得る。
【0085】
以上のように、車両がカーブを適切に通過できると判定された場合、しきい値Kjが大きい値(通常のデフォルト値K2)に設定される。一方、車両がカーブを適切に通過できないと判定された場合、しきい値Kjが相対的に小さい値に調整される。これにより、アンダステア抑制制御が開始され易くなる。
【0086】
このように判定結果Fgに基づいて演算されたしきい値Kjは、目標制御量演算ブロックB11内における制御量特性選択演算ブロックB13に対して出力される。制御量特性選択演算ブロックB13では、「旋回内向きに作用するヨーイングモーメントが増大して車両が進行する向きが変わり易くなるように各輪の制動力が配分される」第1特性(モーメント重視特性)演算ブロックB14と、「車両の旋回を維持するヨーイングモーメントが確保できる範囲内で各輪の制動力の総和が最大となって車両が十分に減速され得るように各輪の制動力が配分される」第2特性(減速度重視特性)演算ブロックB15と、の2つの演算ブロックが含まれている。しきい値Kjに基づいて、第1、第2特性の制御開始しきい値が設定される。本例では、第1、第2特性の制御開始しきい値が共に、しきい値Kjと等しい値に設定される。
【0087】
第1特性では、ステア特性値Sch(例えば、ヨーレイト偏差ΔYr)に基づいて、車両のヨー特性を重視する(減速よりもヨーモーメント付与を優先する)目標制御量Bm**が演算される。車両に旋回内向きのヨーイングモーメントを増大するため、旋回内側後輪(図中で「ri」で表す)について、ステア特性値Sch(例えば、ヨーレイト偏差ΔYr)の増加に応じて目標制御量Bm**が増加するように目標制御量Bm**が演算される。また、旋回内側前輪(図中で「fi」で表す)について、ステア特性値Sch(例えば、ヨーレイト偏差ΔYr)の増加に応じて目標制御量Bm**が増加するように目標制御量Bm**が演算される。この第1特性が、デフォルト特性(初期特性)として、通常設定されている。
【0088】
第2特性では、ステア特性値Sch(例えば、ヨーレイト偏差ΔYr)に基づいて、車両の減速特性を重視する(ヨーモーメント付与よりも減速を優先する)目標制御量Bg**が演算される。車両のヨーイングモーメントを確保しつつ、減速度を増大するため、旋回外側前輪(図中で「fo」で表す)、旋回外側後輪(図中で「fi」で表す)、及び、旋回内側後輪(図中で「ri」で表す)において、ヨーレイト偏差ΔYrの増加に応じて目標制御量Bg**が増加するように目標制御量Bg**が演算される。
【0089】
目標制御量演算ブロックB11内における切替演算ブロックB16では、判定結果Fgに基づいて目標制御量Bm**、及び目標制御量Bg**の何れか一方が、最終的な目標制御量Bt**として選択される。具体的には、判定結果Fgが「0」、或いは、所定値F0以下である場合、即ち、車両が安定して前方のカーブを通過できる(或いは、その可能性が高い)と判定された場合、目標制御量Bm**が、目標制御量Bt**として選択される。一方、判定結果Fgが「1」、或いは、所定値F0よりも大きい場合、即ち、車両が安定して前方のカーブを通過できない(或いは、できる可能性が低い)と判定された場合、目標制御量Bg**が、目標制御量Bt**として選択される。
【0090】
このように、車両がカーブを適切に通過できない(或いは、できる可能性が低い)と判定された場合、目標制御量を演算する特性が第1特性から第2特性に変更される。そのため、アンダステア抑制制御が開始され易くなり、更には、より大きい減速度が得られる特性に変更される。このため、車両がカーブを安定して通過することができる。
【0091】
(目標制御量Bt**に基づく車輪ブレーキの制御)
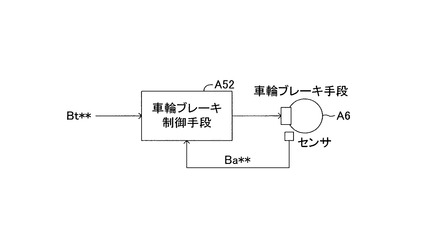
次に、図8を参照しながら、制御手段A5の車輪ブレーキ制御手段A52による車輪ブレーキ制御について詳細に説明する。
【0092】
車輪ブレーキ制御手段A52では、目標制御量Bt**に基づいて車輪ブレーキ手段A6が制御される。車輪ブレーキ制御手段A52として、例えば、制動圧力を制御する電気モータ、ポンプ、ソレノイドバルブ等で構成される公知の手段を用いることができる。車輪ブレーキ手段A6として、例えば、ブレーキキャリパ、ロータ、パッド等で構成される公知の手段を用いることができる。
【0093】
車輪ブレーキ手段A6、或いは、車輪ブレーキ制御手段A52には、目標制御量Bt**に対応した実際値を検出するセンサが備えられる。例えば、目標制御量Bt**が車輪スリップで与えられる場合には車輪速度センサ、制動圧力で与えられる場合には圧力センサ、制動トルクで与えられる場合にはトルクセンサが備えられる。車輪ブレーキ制御手段A52により、前記センサで検出された実際の制御量Ba**と目標制御量Bt**とに基づいて、各車輪の制動力(制動トルク)が制御される。
【0094】
以上、本発明の実施形態に係る車両安定化制御装置によれば、ナビゲーション装置NAVの地図情報MAPに基づくカーブ情報(カーブ形状)Rcと、現在の車速Vxとに基づいて、カーブ進入前後において、車両がカーブを安定して通過できる可能性(Fg)が判定される。車両がカーブを適切に通過できると判定された場合(Fg=0)、アンダステア抑制制御の開始しきい値Kjが大きい値(デフォルト値K2)に設定され、且つ、車両のヨー特性が重視される(減速よりもヨーモーメント付与が優先される)ように各車輪の制動力が配分される第1特性(デフォルト特性Bm**)が選択される。これにより、アンダステア抑制制御が開始され難くなり、アンダステア抑制制御が不必要に頻繁に開始されることが抑制される。また、アンダステア抑制制御開始後には、車両のヨー運動特性が向上し、アンダステアが効果的に抑制され得る。
【0095】
一方、車両がカーブを適切に通過できないと判定された場合(Fg=1)、しきい値Kjが相対的に小さい値(K1)に調整され、且つ、車両の減速特性が重視される(ヨーモーメント付与よりも減速が優先される)ように各車輪の制動力が配分される第2特性(Bg**)が選択される。これにより、車両がカーブを適切に通過できないと判定された場合、アンダステア抑制制御が開始され易くなり、更には、アンダステア抑制制御開始後には、より大きい減速度が得られる。このため、車両が効果的に減速され得、この結果、車両がカーブを安定して通過することができる。
【0096】
本発明は上記実施形態に限定されることはなく、本発明の範囲内において種々の変形例を採用することができる。例えば、上記実施形態では、カーブ情報が正確であることが前提とされてきた。しかしながら、カーブ情報が地図データベースに格納された後、道路の改修等により道路形状が変更されたにもかかわらず地図データベースが更新されない場合が発生し得る。そのため、カーブ通過可否判定の精度が低下する場合がある。
【0097】
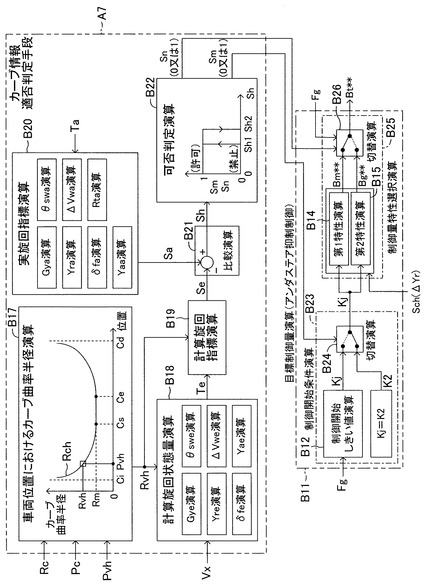
そこで、カーブ通過可否判定を精度良く行うため、車両の実旋回状態量Taに基づいてカーブ情報(カーブの曲率半径)を評価し、カーブ情報が適切である場合にのみ、しきい値Kjの調整、並びに、目標制御量Bt(添字「**」は記号が何れの車輪に関するものであるかを示し、「fl」は左前輪、「fr」は右前輪、「rl」は左後輪、「rr」は右後輪を示す)の演算特性(Bm**,Bg**)の切り替え(以下、「制御パラメータ調整」と称呼する。)を行うことが好ましい。以下、図9を参照しながら、この場合の処理について詳細に説明する。
【0098】
カーブ曲率半径演算ブロックB17では、車両位置Pvhにおけるカーブの曲率半径Rvhが演算される。具体的には、先ず、前述のカーブ情報Rc,Pcに基づいてカーブ内における位置Pcと曲率半径Rcとの関係(曲率半径演算特性)Rchが演算される。曲率半径演算特性Rchは、予め記憶された道路上の複数の点(ノード点)の位置を幾何学的に滑らかに繋いで得られる曲線に基づいて推定することができる(例えば、特許3378490号公報を参照)。或いは、曲率半径演算特性Rchは、緩和曲線(例えば、クロソイド曲線)を表す関数、及び、パラメータ等を用いて地図情報のデータベース内に記憶することができる。
【0099】
曲率半径演算特性Rchに基づいて、車両位置Pvhにおけるカーブ曲率半径Rvhが演算される。即ち、位置と曲率半径との関係で定義される曲率半径演算特性Rchに車両位置Pvhを入力することによって、車両位置Pvhにおけるカーブ曲率半径Rvhが演算される。
【0100】
計算旋回状態量演算ブロックB18では、演算された曲率半径Rvhに基づいて計算旋回状態量Teが演算される。計算旋回状態量Teとして、以下の状態量を演算することができる。
計算横加速度 Gye=Vx2/Rvh
計算ヨーレイト Yre=Vx/Rvh
計算操舵角度 δfe=〔L・(1+Kh・Vx2)〕/Rvh
計算ステアリングホイール角度 θswe=〔SG・L・(1+Kh・Vx2)〕/Rvh
計算車輪速度差 ΔVwe=(Tr・Vx)/Rvh
計算方位角Yae(カーブ入口手前の直線部の方向に対する車両位置Pvhにおけるカーブの接線方向)
ここで、Khはスタビリティファクタ、Lは車両のホイールベース、Trは車両のトレッド、SGは車両のステアリングギア比である。
【0101】
計算旋回指標演算ブロックB19では、計算旋回状態量Teに基づいて計算旋回指標Seが演算される。上述のように演算されたカーブ曲率半径Rvhそのものを計算旋回指標Seとすることができる。更には、上述のそれぞれの計算旋回指標Seのうちで、2つ以上を組み合わせて計算旋回指標Seを演算することができる。
【0102】
実旋回指標演算ブロックB20では、実旋回状態量Taに基づいて実旋回指標Saが演算される。実旋回指標Sa及び計算旋回指標Seとして、同じ(次元の)物理量(状態量)が演算される。例えば、計算旋回指標Seがカーブ曲率半径Rvhである場合、計算旋回指標Seに対応する実旋回指標Saとして、実旋回状態量Taに基づいてカーブ曲率半径Rtaが演算される。Rtaは、以下の何れかの演算により取得され得る。
Rta=Vx2/Gya
Rta=Vx/Yra
Rta=〔L・(1+Kh・Vx2)〕/δfa
Rta=〔SG・L・(1+Kh・Vx2)〕/θswa
ここで、Khはスタビリティファクタ、Lは車両のホイールベース、SGは車両のステアリングギア比である。
【0103】
比較演算ブロックB21では、計算旋回指標Seと実旋回指標Saとが比較される。比較結果Shとして、実旋回指標Saと計算旋回指標Seとの偏差の絶対値(旋回指標偏差)を使用することができる。
【0104】
可否判定演算ブロックB22では、旋回指標偏差Shに基づいて、上述の「制御パラメータ調整」を許可するか否かが判定される。
【0105】
具体的には、旋回指標偏差Shが所定値Sh1以下である場合、カーブ情報が適切であると判断され、制御フラグSm,Snに「1(実行許可)」が出力される。この結果、「制御パラメータ調整」の実行が許可される。一方、偏差Shが所定値Sh1より大きくなった場合、カーブ情報が不適切と判断され、制御フラグSm,Snに「0(実行禁止)」が出力される。この結果、「制御パラメータ調整」の実行が禁止される。ここで、Sm,Snは、「制御パラメータ調整」の実行の禁止・許可を表す制御フラグであり、「0」は調整の実行の禁止、「1」は調整の実行の許可を表す。
【0106】
「制御パラメータ調整」の実行が既に許可されている場合については、偏差Shが所定値Sh2以下である場合、カーブ情報が適切である判断され、制御フラグSm,Snに「1(実行許可)」が出力される。この結果、「制御パラメータ調整」の実行が継続して許可される。一方、偏差Shが所定値Sh2より大きくなった場合、カーブ情報が不適切と判断され、制御フラグSm,Snに「0(実行禁止)」が出力される。この結果、「制御パラメータ調整」の実行が禁止される。
【0107】
可否判定演算ブロックB22からは、制御フラグSmが、目標制御量演算ブロックB11内における制御開始条件演算ブロックB23内のしきい値Kjの切替演算ブロックB24に出力される。制御フラグSnは、目標制御量演算ブロックB11内における制御量特性選択演算ブロックB25内の目標制御量の切替演算ブロックB26に出力される。
【0108】
しきい値Kjの切替演算ブロックB24では、Sm=0(禁止)のときには、Kj=K2(デフォルト値)が選択され、Sm=1(許可)のときには、判定結果Fgに基づいてブロックB12(図7を参照)で演算されるしきい値Kjが選択され、選択されたしきい値Kjが制御量特性選択演算ブロックB25に出力される。
【0109】
目標制御量の切替演算ブロックB26では、Sn=0(禁止)のときには、第1特性(デフォルト特性、ヨーモーメント重視の特性)が選択され、Sn=1(許可)のときには、判定結果Fgに基づいて選択される特性が選択される。
【0110】
以上のように、実旋回状態量Taから得られる実旋回指標Saと、カーブ情報Rc,Pcに基づいて推定される計算旋回状態量Teから得られる計算旋回指標Seとを比較することで、地図情報等から得られるカーブ情報の適否が確認され得る。そして、カーブ情報が適切な場合(Sm,Sn=1の場合)にのみ、「制御パラメータ調整」(具体的には、しきい値Kjの調整、並びに、目標制御量Bt**の演算特性の切り替え)が許可される。従って、カーブ情報が不適切な場合において、「制御パラメータ調整」がなされて車両が不必要に減速される事態の発生が抑制され得る。
【0111】
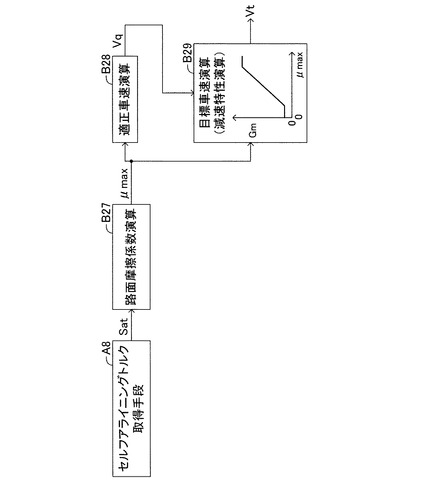
また、上記実施形態においては、図10に示すように、セルフアライニングトルク取得手段A8(セルフアライニングトルクセンサATf*)によって取得される車輪のセルフアライニングトルクSatに基づいて、路面摩擦係数演算ブロックB27にて、路面摩擦係数μmaxの演算を行うことができる。
【0112】
車輪の横力が増大していく過程において、セルフアライニングトルクSatも増大していく。この過程において、横力が飽和する状態(即ち、旋回限界状態)に達する前にセルフアライニングトルクSatが最大値となる。このため、車両の旋回が限界に達する前に路面摩擦係数μmaxを推定することができる。
【0113】
セルフアライニングトルクSatの検出については、例えば、特開2008−24073号公報、特開2007−245901号公報、特開2004−233331号公報等に記載された公知の手法の1つを用いることができる。また、セルフアライニングトルクに基づく路面摩擦係数μmaxの演算についても、例えば、特開2007−245901号公報等に記載された公知の手法の1つを利用することができる。
【0114】
路面摩擦係数演算ブロックB27にて、取得されたセルフアライニングトルクSatに基づいて路面摩擦係数μmaxが演算される。演算された路面摩擦係数μmaxは、適正車速演算ブロックB28での適正車速Vq(図6を参照)の演算や、目標車速演算ブロックB29での減速特性(減速度)Gm(図6を参照)の演算に利用され得る。
【図面の簡単な説明】
【0115】
【図1】本発明の実施形態に係る車両安定化制御装置を搭載した車両の概略構成図である。
【図2】カーブの形状の一例を示した図である。
【図3】図2に示したカーブについての曲率半径と旋回状態量の変化の一例を示した図である。
【図4】図1に示した安定化制御装置が実行する安定化制御の概要を説明するための機能ブロック図である。
【図5】図4に示したカーブ通過可否判定手段によるカーブ通過可否の判定値の演算の一例を説明するための機能ブロック図である。
【図6】図4に示したカーブ通過可否判定手段によるカーブ通過可否の判定値の演算の他の例を説明するための機能ブロック図である。
【図7】図4に示した目標制御量演算手段による目標制御量の演算の一例を説明するための機能ブロック図である。
【図8】図4に示した制御手段の車輪ブレーキ制御手段による車輪ブレーキ制御について説明するための機能ブロック図である。
【図9】本発明の実施形態の変形例に係る車両安定化制御装置による、カーブ情報の適否判定、しきい値の調整、並びに、目標制御量の演算特性の切り替えについての処理の一例を説明するための機能ブロック図である。
【図10】本発明の実施形態の変形例に係る車両安定化制御装置により、セルフアライニングトルクにより路面摩擦係数が演算される場合の処理の一例を説明するための機能ブロック図である。
【符号の説明】
【0116】
AP…アクセルペダル、BP…ブレーキペダル、WS**…車輪速度センサ、PW**…制動圧力センサ、SA…ステアリングホイール角度センサ、YR…ヨーレイトセンサ、GY…横加速度センサ、EG…エンジン、TM…変速機、BRK…ブレーキアクチュエータ、ECU…電子制御ユニット、NAV…ナビゲーション装置、GPS…グローバル・ポジショニング・システム、MAP…記憶部
【技術分野】
【0001】
本発明は、車両の安定化制御装置に関し、特に、車両のアンダステアを抑制するために各車輪の制動力を制御するものに係わる。
【背景技術】
【0002】
従来より、車両がカーブを走行中において、車両のアンダステアの程度がしきい値を超えた場合、車両が減速するように、及び/又は、アンダステアを抑制する方向のヨーモーメントが車両に発生するように各車輪の制動力を制御するアンダステア抑制制御を実行する車両安定化制御装置(アンダステア抑制制御装置)が広く知られている(例えば、特許文献1を参照)。
【特許文献1】特開2004−66940号公報
【発明の開示】
【0003】
アンダステア抑制制御において、「アンダステアの程度に対する各車輪の制動力の特性」(具体的には、上記しきい値そのもの、アンダステアの程度の増加に対する各車輪の制動力の増加態様、車両減速とヨーモーメント付与との優先度合等)は、種々の実験、シミュレーション等を通して、種々の状況を想定した上で決定される。一般には、「アンダステアの程度に対する各車輪の制動力の特性」は、一律の特性(通常特性)に決定される場合が多い。
【0004】
ところで、車両がカーブに進入する前後において、ナビゲーション装置の地図情報に基づくカーブ情報(カーブ形状)を利用すれば、このカーブ形状と現在の車速とに基づいて、車両がカーブを安定して通過できる可能性を判定することができる。
【0005】
この判定により、車両がカーブを安定して通過できない、或いは通過できる可能性が低いことが予め予測できる場合、車両を早期に減速しておくことが好ましい。この減速をアンダステア抑制制御で達成するためには、「アンダステアの程度に対する各車輪に付与される制動力の特性」を、通常特性に代えて、制御がより早期に開始される特性、及び/又は、ヨーモーメント付与に対する車両減速の優先度合がより高い特性に変更されることが好ましいと考えられる。
【0006】
本発明の目的は、車両がカーブを安定して通過できないと予測される場合において車両を効果的に減速し得るアンダステア抑制制御を達成する車両安定化制御装置を提供することにある。
【0007】
本発明に係る車両安定化制御装置は、車両の実際の旋回状態を表す実旋回状態量(Ta,Yr)を取得する実旋回状態量取得手段と、前記実旋回状態量(Ta,Yr)に基づいて前記車両のアンダステアが抑制されるように前記車両の各車輪(WH**)の制動力を制御するための前記各車輪の目標制御量(Bt**)を演算する制御量演算手段と、前記各車輪の目標制御量(Bt**)に基づいて前記各車輪の制動力を制御する制御手段とを備える。
【0008】
本発明に係る車両安定化制御装置は、更に、前記車両の進行方向前方にあるカーブの形状(Rc)を取得するカーブ情報取得手段と、前記車両の速度(Vx)を取得する車速取得手段と、前記カーブ形状(Rc)と前記車両の速度(Vx)とに基づいて、前記車両が前記カーブを安定して通過できる可能性(Fg)を判定するカーブ通過可否判定手段とを備える。この判定は、車両が直線路からカーブに進入する前後(車両がカーブ入口を通過する前後)において実行され得る。
【0009】
ここにおいて、前記カーブ通過可否判定手段は、前記カーブ形状(Rc)と前記車両の速度(Vx)とに基づいて、前記車両に作用する横加速度(Gye)を演算するとともに、前記演算された横加速度(Gye)に基づいて前記車両が前記カーブを安定して通過できる可能性(Fg)を判定するように構成され得る。ここで、横加速度の演算において、「車両の速度」としては、現在の速度が使用され得、「カーブ形状」としては、カーブ内の最小曲率半径が使用され得る。
【0010】
この場合、具体的には、前記カーブ通過可否判定手段は、前記演算された横加速度(Gye)が第1所定値(Gy1)以下の場合、前記車両が前記カーブを安定して通過できる(Fg=0)と判定し、前記演算された横加速度(Gye)が前記第1所定値(Gy1)よりも大きい場合、前記演算された横加速度(Gye)と前記第1所定値(Gy1)との差が大きいほど前記車両が前記カーブを安定して通過できる可能性が低くなるように前記可能性(0<Fg<1)を判定し、前記演算された横加速度(Gye)が前記第1所定値(Gy1)よりも大きい第2所定値(Gy2)以上の場合、前記車両が前記カーブを安定して通過できない(Fg=1)と判定するように構成されることが好適である。
【0011】
また、前記カーブ通過可否判定手段は、前記演算された横加速度(Gye)が第3所定値(Gy3)以下の場合、前記車両が前記カーブを安定して通過できる(Fg=0)と判定し、前記演算された横加速度(Gye)が前記第3所定値(Gy3)よりも大きい場合、前記車両が前記カーブを安定して通過できない(Fg=1)と判定するように構成され得る。
【0012】
また、前記カーブ情報取得手段が前記カーブ形状(Rc)に対応する前記カーブ内の位置(Pc)を取得するように構成される場合においては、車両安定化制御装置が、前記車両の位置(Pvh)を取得する車両位置取得手段と、前記カーブ形状(Rc)に対応する位置(Pc)、前記カーブ形状(Rc)、及び前記車両位置(Pvh)に基づいて、前記車両が前記カーブを安定して通過するための目標車速(Vt)を演算する目標車速演算手段とを備え、前記カーブ通過可否判定手段は、前記目標車速(Vt)と前記車両の速度(Vx)との比較結果に基づいて、前記車両が前記カーブを安定して通過できる可能性(Fg)を判定するように構成され得る。
【0013】
この場合、具体的には、前記カーブ通過可否判定手段は、前記車両の速度(Vx)から前記目標車速(Vt)を減じて得られる車速偏差(ΔV)が第4所定値(V1)以下の場合、前記車両が前記カーブを安定して通過できる(Fg=0)と判定し、前記車速偏差(ΔV)が前記第4所定値(V1)よりも大きい場合、前記車速偏差(ΔV)が大きいほど前記車両が前記カーブを安定して通過できる可能性が低くなるように前記可能性(0<Fg<1)を判定し、前記車速偏差(ΔV)が前記第4所定値(V1)よりも大きい第5所定値(V2)以上の場合、前記車両が前記カーブを安定して通過できない(Fg=1)と判定するように構成されることが好適である。
【0014】
また、前記カーブ通過可否判定手段は、前記車両の速度(Vx)から前記目標車速(Vt)を減じて得られる車速偏差(ΔV)が第6所定値(V3)以下の場合、前記車両が前記カーブを安定して通過できる(Fg=0)と判定し、前記車速偏差(ΔV)が前記第6所定値(V3)よりも大きい場合、前記車両が前記カーブを安定して通過できない(Fg=1)と判定するように構成され得る。
【0015】
本発明に係る車両安定化制御装置の特徴は、前記制御量演算手段が、前記車両が前記カーブを安定して通過できる可能性(Fg)に応じて前記各車輪の目標制御量(Bt**)を調整するように構成されたことにある。これによれば、車両がカーブを安定して通過できない、或いは、通過できる可能性が低いことが予め予測できる場合において、アンダステア抑制制御を利用して、車両を効果的に減速することができる。
【0016】
具体的には、例えば、車両安定化制御装置が、前記車両の操向車輪(WHf*)の舵角に相当する値(θsw,δf)を取得する舵角取得手段と、前記車両の速度(Vx)と前記舵角に相当する値(θsw,δf)とに基づいて前記実旋回状態量(Ta,Yr)に対応する目標旋回状態量(Td,Yrd)を演算する目標旋回状態量演算手段と、前記目標旋回状態量(Td,Yrd)と前記実旋回状態量(Ta,Yr)とを比較することで前記車両のステア特性を表すステア特性値(Sch,ΔYr)を演算するステア特性値演算手段とを備えていて、前記制御量演算手段が、前記ステア特性値(Sch,ΔYr)がしきい値(Kj)以下の場合に前記各車輪の目標制御量(Bt**)をゼロに演算し、前記ステア特性値(Sch,ΔYr)が前記しきい値(Kj)よりも大きい場合に前記各車輪の目標制御量(Bt**)をゼロより大きい値に演算するように構成されている場合において、前記制御量演算手段が、前記車両が前記カーブを安定して通過できる可能性(Fg)が低いほど、前記しきい値(Kj)をより小さい値に設定するように構成されることが好適である。
【0017】
これによれば、車両がカーブを安定して通過できる可能性が低いほど、アンダステア抑制制御が開始され易くなり、従って、アンダステア抑制制御がより早期に開始される。この結果、アンダステア抑制制御を利用して、車両を効果的に減速することができる。
【0018】
或いは、前記制御量演算手段は、前記各車輪の目標制御量(Bt**)の演算について、前記車両の減速よりも前記車両へのヨーモーメントの付与を優先する第1演算特性(Bm**演算特性)と、前記車両へのヨーモーメントの付与よりも前記車両の減速を優先する第2演算特性(Bg**演算特性)とを備えるとともに、前記車両が前記カーブを安定して通過できる可能性(Fg)が高い場合(或いは、安定して通過できると判定された場合)(Fg≦F0)には前記第1演算特性(Bm**演算特性)を使用して前記各車輪の目標制御量(Bt**)を演算し、前記車両が前記カーブを安定して通過できる可能性(Fg)が低い場合(或いは、安定して通過できないと判定された場合)(Fg>F0)には前記第2演算特性(Bg**演算特性)を使用して前記各車輪の目標制御量(Bt**)を演算するように構成されることが好適である。
【0019】
これによれば、車両がカーブを安定して通過できる可能性が低い場合(或いは、安定して通過できない)と判定された場合、ヨーモーメント付与よりも車両減速を優先する特性をもってアンダステア制御が実行される。この結果、アンダステア抑制制御を利用して、車両を効果的に減速することができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明による車両安定化制御装置の実施形態について図面を参照しつつ説明する。
【0021】
(構成)
図1は、本発明の実施形態に係る車両安定化制御装置(以下、「本装置」と称呼する。)を搭載した車両の概略構成を示している。本装置は、車両の動力源であるエンジンEGと、自動変速機TMと、ブレーキアクチュエータBRKと、電子制御ユニットECUと、ナビゲーション装置NAVとを備えている。
【0022】
エンジンEGは、例えば、内燃機関である。即ち、運転者によるアクセルペダル(加速操作部材)APの操作に応じてスロットルアクチュエータTHによりスロットル弁TVの開度が調整される。スロットル弁TVの開度に応じて調整される吸入空気量に応じた量の燃料が燃料噴射アクチュエータFI(インジェクタ)により噴射される。これにより、運転者によるアクセルペダルAPの操作に応じた出力トルクが得られるようになっている。
【0023】
自動変速機TMは、複数の変速段を有する多段自動変速機、或いは、変速段を有さない無段自動変速機である。自動変速機TMは、エンジンEGの運転状態、及びシフトレバー(変速操作部材)SFの位置に応じて、減速比(EG出力軸(=TM入力軸)の回転速度/TM出力軸の回転速度)を自動的に(運転者によるシフトレバーSFの操作によることなく)変更可能となっている。
【0024】
ブレーキアクチュエータBRKは、複数の電磁弁、液圧ポンプ、モータ等を備えた周知の構成を有している。ブレーキアクチュエータBRKは、非制御時では、運転者によるブレーキペダル(制動操作部材)BPの操作に応じた制動圧力(ブレーキ液圧)を車輪WH**のホイールシリンダWC**にそれぞれ供給し、制御時では、ブレーキペダルBPの操作(及びアクセルペダルAPの操作)とは独立してホイールシリンダWC**内の制動圧力を車輪毎に調整できるようになっている。
【0025】
なお、各種記号等の末尾に付された「**」は、各種記号等が何れの車輪に関するものであるかを示していて、「fl」は左前輪、「fr」は右前輪、「rl」は左後輪、「rr」は右後輪を示している。例えば、ホイールシリンダWC**は、左前輪ホイールシリンダWCfl, 右前輪ホイールシリンダWCfr, 左後輪ホイールシリンダWCrl, 右後輪ホイールシリンダWCrrを包括的に示している。
【0026】
本装置は、車輪WH**の車輪速度を検出する車輪速度センサWS**と、ホイールシリンダWC**内の制動圧力を検出する制動圧力センサPW**と、ステアリングホイールSWの(中立位置からの)角度を検出するステアリングホイール角度センサSAと、前輪(操向車輪)の舵角を検出する前輪舵角センサFSと、車体のヨーレイトを検出するヨーレイトセンサYRと、車体前後方向の加速度(減速度)を検出する前後加速度センサGXと、車体横方向の加速度を検出する横加速度センサGYと、エンジンEGの出力軸の回転速度を検出するエンジン回転速度センサNEと、アクセルペダル(加速操作部材)APの操作量を検出する加速操作量センサASと、ブレーキペダルBPの操作量を検出する制動操作量センサBSと、シフトレバーSFの位置を検出するシフト位置センサHSと、スロットル弁TVの開度を検出するスロットル弁開度センサTSと、操舵輪(前輪)のセルフアライニングトルクを検出するセルフアライニングトルクセンサATf*と、ステアリングホイールSWの操舵トルクを検出する操舵トルクセンサSTと、を備えている。
【0027】
セルフアライニングトルクセンサATf*は、例えば、操舵輪のホイールリムに固着されて、ホイールリムの歪を検出することで、この歪に関する情報と歪が検出されたホイールリムの位置とに基づいて、セルフアライニングトルクを検出する。
【0028】
電子制御ユニットECUは、パワートレイン系及びシャシー系を電子制御するマイクロコンピュータである。電子制御ユニットECUは、上述の各種アクチュエータ、上述の各種センサ、及び自動変速機TMと、電気的に接続され、又はネットワークで通信可能となっている。電子制御ユニットECUは、互いに通信バスCBで接続された複数の制御ユニット(ECU1〜ECU4)から構成される。
【0029】
電子制御ユニットECU内のECU1は、車輪ブレーキ制御ユニットであり、車輪速度センサWS**、前後加速度センサGX、横加速度センサGY、ヨーレイトセンサYR等からの信号に基づいてブレーキアクチュエータBRKを制御することで、周知の車両安定化制御(ESC制御)、アンチスキッド制御(ABS制御)、トラクション制御(TCS制御)等の制動圧力制御(車輪ブレーキ制御)を実行するようになっている。また、ECU1は、車輪速度センサWS**の検出結果(車輪速度Vw**)に基づいて車両速度(車速)Vxを演算するようになっている。
【0030】
電子制御ユニットECU内のECU2は、エンジン制御ユニットであり、加速操作量センサAS等からの信号に基づいてスロットルアクチュエータTH及び燃料噴射アクチュエータFIを制御することでエンジンEGの出力トルク制御(エンジン制御)を実行するようになっている。
【0031】
電子制御ユニットECU内のECU3は、自動変速機制御ユニットであり、シフト位置センサHS等からの信号に基づいて自動変速機TMを制御することで減速比制御(変速機制御)を実行するようになっている。
【0032】
電子制御ユニットECU内のECU4は、電動パワーステアリング制御ユニットであり、操舵トルクセンサST等からの信号に基づいて電動パワーステアリング装置EPSを制御することでパワーステアリング制御を実行するようになっている。
【0033】
ナビゲーション装置NAVは、ナビゲーション処理装置PRCを備えていて、ナビゲーション処理装置PRCは、車両位置検出手段(グローバル・ポジショニング・システム)GPS、ヨーレイトジャイロGYR、入力部INP、記憶部MAP、及び表示部(ディスプレー)MTRと電気的に接続されている。ナビゲーション装置NAVは、電子制御ユニットECUと、電気的に接続され、又は無線で通信可能となっている。
【0034】
車両位置検出手段GPSは、人工衛星からの測位信号を利用した周知の手法の一つにより車両の位置(緯度、経度等)を検出可能となっている。ヨーレイトジャイロGYRは、車体の角速度(ヨーレイト)を検出可能となっている。入力部INPは、運転者によるナビゲーション機能に係わる操作を入力するようになっている。記憶部MAPは、地図情報、道路情報等の各種情報を記憶している。
【0035】
ナビゲーション処理装置PRCは、車両位置検出手段GPS、ヨーレイトジャイロGYR、入力部INP、及び記憶部MAPからの信号を総合的に処理し、その処理結果(ナビゲーション機能に係わる情報)を表示部MTRに表示するようになっている。
【0036】
以下、図2に示す形状を有するカーブを想定しながら、上記のように構成された本装置の説明を続ける。図2に示す(1つの)カーブは、カーブ開始地点Ci(カーブ入口)からカーブ終了地点Cd(カーブ出口)に向けて順に、進入緩和曲線区間Zci(車両の進行に伴い曲率半径が徐々に小さくなる)、一定曲率半径区間Zit、及び退出緩和曲線区間Zcd(車両の進行に伴い曲率半径が徐々に大きくなる)から構成されている。緩和曲線は、例えば、クロソイド曲線で構成される。緩和曲線区間が設けられているのは、運転者に急激なステアリングホイール操作を要求することなく、運転者がステアリングホイールを徐々に切り込み、その後徐々に切り戻すことで車両がカーブを円滑に通過できるようにするためである。
【0037】
図3に示すように、このカーブでは、曲率半径は、カーブ開始地点Ci(即ち、直線路の終了地点)にて無限大であり、その後、徐々に小さくなり、一定曲率半径区間Zitの開始地点CsでRm(カーブ内の最小曲率半径)となる。その後、曲率半径は、一定曲率半径区間Zitの終了地点CeまでRmに維持された後、徐々に大きくなり、カーブ終了地点Cd(即ち、直線路の開始地点)にて無限大となる。このカーブを一定の車速で車両が走行すると、旋回状態量(例えば、横加速度)は、カーブ開始地点Ciにおいて「0(直線走行)」から増大を開始し、進入緩和曲線区間Zciでは概ね比例的に増加し、一定曲率半径区間Zitでは一定の値(最大値)となる。その後、旋回状態量は、退出緩和曲線区間Zcdにて概ね比例的に減少し、カーブ終了地点Cdにおいて「0(直線走行)」となる。
【0038】
車両が過剰な車速をもってカーブへ進入した場合を考える。運転者はカーブの進入緩和曲線に沿ってステアリングホイール角度を徐々に増大させていく。これにより、車両にアンダステアが発生するとともにアンダステアの程度が増大していく。この結果、車両が進入緩和曲線上をトレースできなくなると、運転者は更にステアリングホイールを切り増して行く。このような状況は、カーブ入口Ciではなく、カーブの一定曲率半径区間Zitの入口Cs付近で発生し易い。
【0039】
(車両安定化制御の概要)
以下、図4を参照しながら、本装置により実行される車両安定化制御の概要について説明する。
【0040】
先ず、実旋回状態量取得手段A1では、実際の車両のヨー運動状態量(実旋回状態量Ta)が取得される。実旋回状態量Taは、車両に対して実際に発生しているヨー運動状態量であり、例えば、実ヨーレイトYr、実横加速度Gy、実車体スリップ角βa、実車体スリップ角速度dβaである。また、実旋回状態量Taとして、これらのうちから2つ以上の状態量を組み合わせて得られる値が使用され得る。
【0041】
目標旋回状態量演算手段A2では、目標とする車両のヨー運動状態量(目標旋回状態量ともいう)Tdが取得される。目標旋回状態量Tdとしては、実旋回状態量Taに対応した同じ次元の値(目標ヨーレイトYrd、目標横加速度Gyd、目標スリップ角βd、目標スリップ角速度dβd)が演算される。目標旋回状態量Tdは、車速Vx及びステアリングホイール角度θsw(或いは、前輪舵角δf)に基づいて演算され得る。
【0042】
ステア特性演算手段A3では、実旋回状態量Taと目標旋回状態量Tdとに基づいて車両のステア特性(アンダステア、ニュートラルステア、オーバステア)が演算され、その演算結果(ステア特性値)Schが演算される。ステア特性値Schは、車両のステア特性の程度を表す値であり、目標旋回状態量Tdと実旋回状態量Taとを比較することで得演算され得る。ステア特性値Schとしては、TdとTaとの偏差(=Td−Ta)が使用され得る。ここで、目標旋回状態量Tdを使用することなくステア特性を演算することができる。例えば、実スリップ角速度dβa、実スリップ角βa等に基づいてステア特性を演算することができる。
【0043】
目標制御量演算手段A4では、ステア特性値Schに基づいて、車両のアンダステア、オーバステアを抑制するための、各車輪に付与される制動力の目標制御量Bt**、動力源(エンジン等)の目標出力Otが演算される。目標制御量演算手段A4では、後述する判定結果Fgに基づいて目標制御量Bt**が調整される。目標制御量演算手段A4には、車両のアンダステアを抑制するアンダステア抑制制御ブロックと、車両のオーバステアを抑制するオーバステア抑制制御ブロックとが含まれる。
【0044】
アンダステア抑制制御ブロックでは、ステア特性値Schに基づいてアンダステア抑制制御を開始する制御開始条件(制御開始しきい値Kj)が設定される。しきい値Kjは、後述するカーブ通過可否判定手段A8による判定結果Fgに基づいて調整される。判定結果Fgが「カーブ通過が可能(判定結果Fgが「0」、或いは、相対的に小さい値)」となった場合、しきい値Kjが大きい値に設定されて、アンダステア抑制制御が開始され難くなる。一方、判定結果Fgが「カーブ通過が不可(判定結果Fgが「1」、或いは、相対的に大きい値)」となった場合、しきい値Kjが小さい値に修正されて、アンダステア抑制制御が小さいステア特性値Schで開始されるように調整される。この結果、アンダステア抑制制御が開始され易くなる。
【0045】
また、目標制御量演算手段A4では、ステア特性値Schに基づいて、目標制御量Bt**の演算について、車両のヨー特性を重視する(減速よりもヨーモーメント付与を優先する)第1特性(目標制御量Bm**を演算する特性)と、車両の減速特性を重視する(ヨーモーメント付与よりも減速を優先する)第2特性(目標制御量Bg**を演算する特性)の2種類の特性が備えられている。
【0046】
第1特性では、旋回内向きに作用するヨーイングモーメントが増大して車両が進行する向きが変わり易くなるように各輪の制動力が配分される。一方、第2特性では、車両の旋回を維持するヨーイングモーメントが確保できる範囲内で各輪の制動力の総和が最大となって車両が十分に減速され得るように各輪の制動力が配分される。
【0047】
後述するカーブ通過可否判定手段A8による判定結果Fgが「カーブ通過可能」となったとき(判定結果Fgが「0」、或いは、相対的に小さい値のとき)、目標制御量Bt**の演算特性として第1特性が選択される。この結果、アンダステア抑制制御が開始された場合において車両のヨー運動特性が向上する。一方、判定結果Fgが「カーブ通過不可」となったとき(判定結果Fgが「1」、或いは、相対的に大きい値のとき)、目標制御量Bt**の演算特性として第2特性が選択される。この結果、アンダステア抑制制御が開始された場合において、車両の減速が優先されて、カーブの旋回半径を維持しつつ最大限の車両減速度が得られる。
【0048】
制御手段A5では、目標制御量演算手段A4により演算された目標制御量に基づいて、動力源の出力が低減され、各車輪の制動力が独立して制御される。具体的には、目標制御量Bt**に基づいて、各車輪の制動力を制御する車輪ブレーキ制御手段A51が制御される。また、目標制御量Otに基づいて、エンジン等の動力源の出力を制御する動力源出力制御手段A52が制御される。
【0049】
カーブ情報取得手段A6では、車両の前方にあるカーブの情報Rc(カーブ形状であり、例えば曲率半径)が取得される。このとき、カーブ曲率半径Rcに併せて、カーブ曲率半径Rcに対応する位置Pcを取得することができる。これらのカーブ情報Rc,Pcは、記憶部MAPの地図データベースに記憶されている。カーブ情報として、位置Pc(例えば、緯度・経度)と、その位置におけるカーブ曲率半径Rcとが直接的に記憶されていてもよいし、これらが演算できる書式が記憶されていてもよい。
【0050】
車速取得手段A7では、車両の速度Vxが取得される。
【0051】
カーブ通過可否判断手段A8では、車両の進行方向前方にあるカーブの形状Rc(特に、カーブの曲率半径)と、車両の速度Vxとに基づいて、車両がカーブを安定して通過できるか否かが判定される。具体的には、カーブの形状(曲率半径)から最小曲率半径Rmが決定され、この最小曲率半径Rmと現在の車速Vxとに基づいて、横加速度Gye(=Vx2/Rm)が演算される。この場合、横加速度Gyeは、車両が対象とされるカーブを車速Vx一定で通過した場合に生ずる横加速度の最大値(計算値)に相当する。
【0052】
横加速度Gyeが所定値(例えば、0.8G)未満の場合、車両はカーブを安定して通過できると判定され得る。一方、横加速度Gyeが前記所定値以上の場合、車両はカーブを安定して通過できないと判定され得る。この所定値として、予め設定された定数を使用することもできるが、路面摩擦係数μmaxに基づいて決定される値を使用することもできる。
【0053】
このカーブ通過可否判定手段A8により、カーブ通過可否の判定値Fgが演算され、この判定値Fgが目標制御量演算手段A4に出力される。判定値Fgは、Fg=0のとき「カーブ通過可能」を表し、Fg=1のときに「カーブ通過不能」を表す。また、判定値Fgは、「0」又は「1」のみではなく、それらの中間の値(0<Fg<1)に演算されることもできる。
【0054】
上述の説明では、カーブの最小曲率半径Rmと実際の車速Vxとから演算される、「カーブを通過できたならば車両に作用するであろう最大横加速度Gye」に基づいてカーブ通過可否判定が行われる。以下に述べるように、この方法とは異なる方法によってカーブ通過の可否を判定することができる。
【0055】
即ち、車両の位置Pvhを取得する車両位置取得手段A9が設けられる。これにより、車両位置Pvhが取得される。車両位置Pvhは、グローバル・ポジショニング・システムGPSを用いて検出される。
【0056】
この場合、カーブ情報取得手段A6では、カーブ形状Rcと、そのカーブ形状Rcに対応したカーブ内の位置Pcが取得される。カーブ形状Rc、カーブ位置Pc、及び、取得された車両位置Pvhに基づいて目標車速Vtが演算される。具体的には、カーブ情報Rc,Pcに基づいてカーブを安定して通過するための適正車速Vqが演算され、この適正車速Vqと車両位置Pvhとに基づいて、現在の車両位置Pvhにおける目標車速Vtが演算される。目標車速Vtと車速Vxとが比較され、この比較結果に基づいて、車両がカーブを安定して通過できるか否かが判定される。
【0057】
車両位置Pvhにおいて、車速Vxが目標車速Vt以下の場合、車両はカーブを安定して通過できると判定され得る。一方、車速Vxが目標車速Vtを超過している場合、車両はカーブを安定して通過できないと判定され得る。この場合も前述と同様、カーブ通過可否判定手段A8により、カーブ通過可否の判定値Fgが演算され、この判定値Fgが目標制御量演算手段A4に出力される。判定値Fgは、Fg=0のとき「カーブ通過可能」を表し、Fg=1のときに「カーブ通過不能」を表す。また、判定値Fgは、「0」又は「1」のみではなく、それらの中間の値(0<Fg<1)に演算されることもできる。
【0058】
(カーブ通過可否の判定値Fgの演算の一例)
次に、図5を参照しながら、カーブ通過可否判定手段A8によるカーブ通過可否の判定値Fgの演算の一例について詳細に説明する。図5は、前述の横加速度Gyeを使用して判定値Fgが演算される場合の一例を示す。
【0059】
最小曲率半径演算ブロックB1では、車両の進行方向前方にあるカーブ形状(カーブ曲率半径)Rcに基づいて、カーブの最小曲率半径Rmが演算される。
【0060】
横加速度演算ブロックB2では、最小曲率半径(一定曲率半径一定区間Zitの曲率半径)Rm、及び、現在の車速Vxに基づいて、以下の式を用いて、横加速度Gyeが演算される。ここで、横加速度Gyeは、車両が現在の車速Vx一定でカーブを通過できたならば車両に作用するであろう横加速度の最大値である。
Gye=Vx2/Rm
【0061】
カーブ通過可否判定演算ブロックB3では、車両がカーブを安定して通過可能か否かを表す判定値Fgが、横加速度Gyeに基づいて演算される。具体的には、横加速度Gyeが所定値Gy1以下の場合、車両がカーブを安定して通過できることを表すFg=0が演算される。横加速度Gyeが所定値Gy1より大きく且つ所定値Gy2未満の場合、横加速度GyeのGy1からの増加に従って判定値Fgが「0」から増加するように判定値Fgが演算される。横加速度Gyeが所定値Gy2以上の場合、車両がカーブを安定して通過できないことを表すFg=1が演算される。判定値Fgが「0」より大きく「1」未満の場合、車両がカーブを安定して通過できる(通過できない)可能性の程度を表す。具体的には、判定値Fgが大きいほど(「1」に近いほど)カーブ通過の可能性が低く、判定値Fgが小さいほど(「0」に近いほど)カーブ通過の可能性が高いことを表す。
【0062】
また、図中の一転鎖線で示すように、判定値Fgは、横加速度Gyeが所定値Gy3以下の場合にFg=0(カーブ通過可能)に、横加速度Gyeが所定値Gy3より大きい場合にFg=1(カーブ通過不可)になるように演算され得る。
【0063】
車両がタイヤと路面との摩擦係数に基づいて決定される横加速度を超えた横加速度をもって旋回することは物理的に不可能である。このため、所定値Gy1、或いは、Gy3は、タイヤと路面との摩擦係数を考慮して、0.8G程度に設定され得る。また、路面摩擦係数μmaxを演算して、これに基づいて所定値Gy1、Gy2、Gy3を調整することができる。路面摩擦係数μmaxが小さい値に演算される場合、所定値Gy1、Gy2、Gy3が相対的に小さい値に調整され、路面摩擦係数μmaxが大きい値に演算される場合、所定値Gy1、Gy2、Gy3が相対的に大きい値に調整され得る。
【0064】
(カーブ通過可否の判定値Fgの演算の他の例)
次に、図6を参照しながら、カーブ通過可否判定手段A8によるカーブ通過可否の判定値Fgの演算の他の例について詳細に説明する。図6は、前述の目標車速Vtを使用して判定値Fgが演算される場合の一例を示す。
【0065】
適正車速演算ブロックB4では、上述のカーブ情報Rc,Pc(カーブ形状(カーブの曲率半径)Rcと、これに対応するカーブの位置Pc)に基づいて、車両がカーブを安定して通過するための適正車速Vqが演算される。カーブ情報Rc,Pcに基づいて、カーブ内の曲率半径が一定となる区間(一定曲率半径区間Zit)の曲率半径Rmが決定される。この曲率半径Rmに基づいて適正車速Vqが演算される。曲率半径Rmとして、カーブ内の最小曲率半径が使用されてもよい。カーブ曲率半径Rmが大きいほど適正車速Vqがより大きい値に演算され、曲率半径Rmが小さいほど適正車速Vqがより小さい値に演算される。
【0066】
更に、適正車速Vqは登降坂勾配Kud、道幅(幅員)Wrd、前方の見通しMsk、及び、車速Vxのうちの少なくとも1つ以上に基づいて調整することができる。登降坂勾配Kudが、降り坂のときには平坦路の場合に比較して適正車速Vqが小さく調整され、登り坂のときは平坦路の場合に比較して適正車速Vqが大きく調整される。道幅Wrdが狭い場合には、広い場合に比較して適正車速Vqが小さく調整され、道幅Wrdが広い場合には、狭い場合に比較して適正車速Vqが大きく調整される。前方の見通しMskが悪い場合には、良い場合に比較して適正車速Vqが小さく調整され、前方の見通しMskが良い場合には、悪い場合に比較して適正車速Vqが大きく調整される。車速Vxが高い場合には、低い場合に比較して適正車速Vqが小さく調整され、車速Vxが低い場合には、高い場合に比較して適正車速Vqが大きく調整される。
【0067】
路面摩擦係数μmaxに基づいて、適正車速Vqを調整することもできる。路面摩擦係数μmaxが大きいときには適正車速Vqが大きい値に調整され、路面摩擦係数μmaxが小さいときには適正車速Vqが小さい値に調整される。
【0068】
基準位置設定演算ブロックB5では、基準地点Pcrが決定される。基準地点Pcrは、車両がカーブを適正に通過できるか否かの判定の基準となる地点であり、車速が適正車速Vqまで減少すべき目標となる地点である。基準地点Pcrは、カーブ内の曲率半径が一定となる入口地点Cs(一定曲率半径区間Zitにおける車両に最も近い地点)に設定することができる。また、カーブ内の曲率半径が最小となる地点Csを、基準地点Pcrとして設定することができる。地点Csは、カーブ形状Rc、及び、カーブ位置Pcに基づいて決定される。
【0069】
地点Pcrは、一定曲率半径区間の入口地点Cs、或いは、曲率半径最小地点よりも距離Lprだけ車両に近い地点(車両に近い側のカーブへの進入部に当たる緩和曲線の終了部付近)に設定することができる。距離Lprは一定値とすることができる。
【0070】
また、距離Lprは車速Vxに応じて演算することができる。具体的には、車速Vxが所定値Vx1以下では距離Lprが「0」とされ(即ち、地点PcrがCsと一致し)、Vx>Vx1(所定値)では、車速VxのVx1からの増加に従って距離Lprが「0」から増大するように距離Lprが決定され得る。ここで、車速Vxを適正車速Vqに置き換えて、適正車速Vqに基づいて距離Lprを決定することができる。
【0071】
この場合、地点Pcrは、地点Csから距離Lprだけカーブ開始地点Ciに近いカーブ上の地点に設定される。即ち、地点Pcrは、距離Lpr、カーブ形状Rc、及び、地点Cs(カーブ位置Pc)に基づいて設定される。
【0072】
上述のように、地点Pcrは車速が適正車速Vqまで減少すべき目標とされる地点である。ここで、地図情報等には誤差が含まれる場合がある。上記のように地点Pcrを地点Csよりもカーブ入口Ciに距離Lprだけ近い地点に設定することで、その誤差が吸収され得る。
【0073】
目標車速演算ブロックB6では、目標車速Vtが演算される。具体的には、先ず、基準地点Pcr、及び、適正車速Vqに基づいて、車両位置Pvhにおける目標車速Vt(Vt[Pvh])を演算するための目標車速演算特性Vtchが決定される。この目標車速演算特性Vtchとしては、カーブ入口側から基準地点Pcrまで車速が減速度Gm(例えば、予め設定された定数)をもって減少していき、基準地点Pcrで車速が適正車速Vqとなる特性が採用される。
【0074】
減速度Gmは、路面摩擦係数μmaxに基づいて調整することができる。具体的には、路面摩擦係数μmaxが大きいときには減速度Gmが大きい値に調整され、路面摩擦係数μmaxが小さいときには減速度Gmが小さい値に調整される。そして、基準地点Pcr、及び、適正車速Vqに基づいて決定された目標車速演算特性Vtchに、車両位置取得手段(グローバル・ポジショニング・システムGPS)によって取得された車両位置Pvhを入力することで、車両位置Pvhにおける目標車速Vtが演算される。
【0075】
カーブ通過可否判定演算ブロックB7では、車両が前方のカーブを安定して通過可能か否かを表す判定値Fgが演算する。具体的には、車速取得手段A7により取得された車速Vxと目標車速Vtとが比較され、この車速偏差ΔV(=Vx−Vt)に基づいて判定値Fgが演算される。
【0076】
車速偏差ΔVが所定値V1以下の場合、車両がカーブを安定して通過できることを表すFg=0が演算される。車速偏差ΔVが所定値V1より大きく且つ所定値V2未満の場合、ΔVのV1からの増加に従って判定値Fgが「0」から増加するように判定値Fgが演算される。車速偏差ΔVが所定値V2以上の場合、車両がカーブを安定して通過できないことを表すFg=1が演算される。判定値Fgが「0」より大きく、「1」未満の場合、車両がカーブを安定して通過できる(通過できない)可能性の程度を表す。具体的には、判定値Fgが大きいほど(「1」に近いほど)カーブ通過の可能性が低く、判定値Fgが小さいほど(「0」に近いほど)カーブ通過の可能性が高いことを表す。
【0077】
また、図中の一転鎖線で表すように、判定値Fgは、車速偏差ΔVが所定値V3以下の場合にFg=0(カーブ通過可能)に、ΔVが所定値V3より大きい場合にFg=1(カーブ通過不可)になるように演算され得る。
【0078】
(目標制御量Bt**演算)
次に、図7を参照しながら、目標制御量演算手段A4による目標制御量Bt**の演算の一例について詳細に説明する。
【0079】
目標旋回状態量演算ブロック(目標ヨーレイト演算ブロック、目標旋回状態量演算手段A2に対応)B8では、上述の実旋回状態量Taに対応する同じ次元の目標旋回状態量Tdが演算される。例えば、実旋回状態量TaがヨーレイトセンサYRによって検出された実際のヨーレイトYrである場合、車速Vx、及び、ステアリングホイール角度θsw(或いは、操向車輪の舵角δf)に基づいて目標ヨーレイトYrdが演算される。
【0080】
比較演算ブロック(ステア特性演算ブロック、ステア特性演算手段A3に対応)B9では、目標旋回状態量Tdと実旋回状態量Taとが比較され、ステア特性値Sch(=Td−Ta)が演算される。ステア特性値Schは、車両のステア特性(アンダステア、オーバステア)の程度を表す値である。ステア特性値Schが概ね「0」の場合、車両はニュートラルステアである。Sch<0である場合、車両はオーバステアであり、ステア特性値Schの絶対値が大きいほどオーバステアの程度が大きい。一方、Sch>0である場合、車両はアンダステアであり、ステア特性値Schが大きいほどアンダステアの程度が大きい。
【0081】
例えば、ステア特性値Schがヨーレイトで表される場合、目標ヨーレイトYrdと実ヨーレイトYrとが比較され、車両のステア特性(アンダステア、オーバステア等)を表すヨーレイト偏差ΔYr(=Yrd−Yr)が出力される。ヨーレイト偏差ΔYrが概ね「0」である場合、車両はニュートラルステアである。ΔYr<0である場合、車両はオーバステアであり、ΔYrの絶対値が大きいほどオーバステアの程度が大きい。一方、ΔYr>0である場合、車両はアンダステアであり、ΔYrが大きいほどアンダステアの程度が大きい。
【0082】
車両がオーバステアの場合、ステア特性値Sch(例えば、ヨーレイト偏差ΔYr)は、公知のオーバステア抑制制御の目標制御量演算ブロックB10に入力される。一方、車両がアンダステアの場合、ステア特性値Sch(例えば、ヨーレイト偏差ΔYr)は、本発明に係るアンダステア抑制制御の目標制御量演算ブロックB11に入力される。この目標制御量演算ブロックB11が目標制御量演算手段A4の一部に対応する。
【0083】
アンダステア抑制制御の目標制御量演算ブロックB11内における制御開始しきい値演算ブロックB12では、上述の判定結果(判定値)Fgに基づいて、しきい値Kjが演算される。判定結果Fgが所定値F1(0<F1<1)以下の場合、しきい値Kjが所定値K2に設定される。所定値K2は、デフォルト値(初期値)として通常設定される値である。また、判定結果Fgが所定値F2(F1<F2<1)以上の場合、しきい値Kjが所定値K1(<K2)に演算される。判定結果Fgが所定値F1より大きく且つ所定値F2より小さい場合、判定結果Fgが増加するほどしきい値Kjがより小さい値に演算される。
【0084】
また、図中の一転鎖線で示すように、判定結果Fgが所定値F3以下の場合にKj=K2に、判定結果Fgが所定値F3よりも大きい場合にKj=K1(<K2)になるようにしきい値Kjが演算され得る。
【0085】
以上のように、車両がカーブを適切に通過できると判定された場合、しきい値Kjが大きい値(通常のデフォルト値K2)に設定される。一方、車両がカーブを適切に通過できないと判定された場合、しきい値Kjが相対的に小さい値に調整される。これにより、アンダステア抑制制御が開始され易くなる。
【0086】
このように判定結果Fgに基づいて演算されたしきい値Kjは、目標制御量演算ブロックB11内における制御量特性選択演算ブロックB13に対して出力される。制御量特性選択演算ブロックB13では、「旋回内向きに作用するヨーイングモーメントが増大して車両が進行する向きが変わり易くなるように各輪の制動力が配分される」第1特性(モーメント重視特性)演算ブロックB14と、「車両の旋回を維持するヨーイングモーメントが確保できる範囲内で各輪の制動力の総和が最大となって車両が十分に減速され得るように各輪の制動力が配分される」第2特性(減速度重視特性)演算ブロックB15と、の2つの演算ブロックが含まれている。しきい値Kjに基づいて、第1、第2特性の制御開始しきい値が設定される。本例では、第1、第2特性の制御開始しきい値が共に、しきい値Kjと等しい値に設定される。
【0087】
第1特性では、ステア特性値Sch(例えば、ヨーレイト偏差ΔYr)に基づいて、車両のヨー特性を重視する(減速よりもヨーモーメント付与を優先する)目標制御量Bm**が演算される。車両に旋回内向きのヨーイングモーメントを増大するため、旋回内側後輪(図中で「ri」で表す)について、ステア特性値Sch(例えば、ヨーレイト偏差ΔYr)の増加に応じて目標制御量Bm**が増加するように目標制御量Bm**が演算される。また、旋回内側前輪(図中で「fi」で表す)について、ステア特性値Sch(例えば、ヨーレイト偏差ΔYr)の増加に応じて目標制御量Bm**が増加するように目標制御量Bm**が演算される。この第1特性が、デフォルト特性(初期特性)として、通常設定されている。
【0088】
第2特性では、ステア特性値Sch(例えば、ヨーレイト偏差ΔYr)に基づいて、車両の減速特性を重視する(ヨーモーメント付与よりも減速を優先する)目標制御量Bg**が演算される。車両のヨーイングモーメントを確保しつつ、減速度を増大するため、旋回外側前輪(図中で「fo」で表す)、旋回外側後輪(図中で「fi」で表す)、及び、旋回内側後輪(図中で「ri」で表す)において、ヨーレイト偏差ΔYrの増加に応じて目標制御量Bg**が増加するように目標制御量Bg**が演算される。
【0089】
目標制御量演算ブロックB11内における切替演算ブロックB16では、判定結果Fgに基づいて目標制御量Bm**、及び目標制御量Bg**の何れか一方が、最終的な目標制御量Bt**として選択される。具体的には、判定結果Fgが「0」、或いは、所定値F0以下である場合、即ち、車両が安定して前方のカーブを通過できる(或いは、その可能性が高い)と判定された場合、目標制御量Bm**が、目標制御量Bt**として選択される。一方、判定結果Fgが「1」、或いは、所定値F0よりも大きい場合、即ち、車両が安定して前方のカーブを通過できない(或いは、できる可能性が低い)と判定された場合、目標制御量Bg**が、目標制御量Bt**として選択される。
【0090】
このように、車両がカーブを適切に通過できない(或いは、できる可能性が低い)と判定された場合、目標制御量を演算する特性が第1特性から第2特性に変更される。そのため、アンダステア抑制制御が開始され易くなり、更には、より大きい減速度が得られる特性に変更される。このため、車両がカーブを安定して通過することができる。
【0091】
(目標制御量Bt**に基づく車輪ブレーキの制御)
次に、図8を参照しながら、制御手段A5の車輪ブレーキ制御手段A52による車輪ブレーキ制御について詳細に説明する。
【0092】
車輪ブレーキ制御手段A52では、目標制御量Bt**に基づいて車輪ブレーキ手段A6が制御される。車輪ブレーキ制御手段A52として、例えば、制動圧力を制御する電気モータ、ポンプ、ソレノイドバルブ等で構成される公知の手段を用いることができる。車輪ブレーキ手段A6として、例えば、ブレーキキャリパ、ロータ、パッド等で構成される公知の手段を用いることができる。
【0093】
車輪ブレーキ手段A6、或いは、車輪ブレーキ制御手段A52には、目標制御量Bt**に対応した実際値を検出するセンサが備えられる。例えば、目標制御量Bt**が車輪スリップで与えられる場合には車輪速度センサ、制動圧力で与えられる場合には圧力センサ、制動トルクで与えられる場合にはトルクセンサが備えられる。車輪ブレーキ制御手段A52により、前記センサで検出された実際の制御量Ba**と目標制御量Bt**とに基づいて、各車輪の制動力(制動トルク)が制御される。
【0094】
以上、本発明の実施形態に係る車両安定化制御装置によれば、ナビゲーション装置NAVの地図情報MAPに基づくカーブ情報(カーブ形状)Rcと、現在の車速Vxとに基づいて、カーブ進入前後において、車両がカーブを安定して通過できる可能性(Fg)が判定される。車両がカーブを適切に通過できると判定された場合(Fg=0)、アンダステア抑制制御の開始しきい値Kjが大きい値(デフォルト値K2)に設定され、且つ、車両のヨー特性が重視される(減速よりもヨーモーメント付与が優先される)ように各車輪の制動力が配分される第1特性(デフォルト特性Bm**)が選択される。これにより、アンダステア抑制制御が開始され難くなり、アンダステア抑制制御が不必要に頻繁に開始されることが抑制される。また、アンダステア抑制制御開始後には、車両のヨー運動特性が向上し、アンダステアが効果的に抑制され得る。
【0095】
一方、車両がカーブを適切に通過できないと判定された場合(Fg=1)、しきい値Kjが相対的に小さい値(K1)に調整され、且つ、車両の減速特性が重視される(ヨーモーメント付与よりも減速が優先される)ように各車輪の制動力が配分される第2特性(Bg**)が選択される。これにより、車両がカーブを適切に通過できないと判定された場合、アンダステア抑制制御が開始され易くなり、更には、アンダステア抑制制御開始後には、より大きい減速度が得られる。このため、車両が効果的に減速され得、この結果、車両がカーブを安定して通過することができる。
【0096】
本発明は上記実施形態に限定されることはなく、本発明の範囲内において種々の変形例を採用することができる。例えば、上記実施形態では、カーブ情報が正確であることが前提とされてきた。しかしながら、カーブ情報が地図データベースに格納された後、道路の改修等により道路形状が変更されたにもかかわらず地図データベースが更新されない場合が発生し得る。そのため、カーブ通過可否判定の精度が低下する場合がある。
【0097】
そこで、カーブ通過可否判定を精度良く行うため、車両の実旋回状態量Taに基づいてカーブ情報(カーブの曲率半径)を評価し、カーブ情報が適切である場合にのみ、しきい値Kjの調整、並びに、目標制御量Bt(添字「**」は記号が何れの車輪に関するものであるかを示し、「fl」は左前輪、「fr」は右前輪、「rl」は左後輪、「rr」は右後輪を示す)の演算特性(Bm**,Bg**)の切り替え(以下、「制御パラメータ調整」と称呼する。)を行うことが好ましい。以下、図9を参照しながら、この場合の処理について詳細に説明する。
【0098】
カーブ曲率半径演算ブロックB17では、車両位置Pvhにおけるカーブの曲率半径Rvhが演算される。具体的には、先ず、前述のカーブ情報Rc,Pcに基づいてカーブ内における位置Pcと曲率半径Rcとの関係(曲率半径演算特性)Rchが演算される。曲率半径演算特性Rchは、予め記憶された道路上の複数の点(ノード点)の位置を幾何学的に滑らかに繋いで得られる曲線に基づいて推定することができる(例えば、特許3378490号公報を参照)。或いは、曲率半径演算特性Rchは、緩和曲線(例えば、クロソイド曲線)を表す関数、及び、パラメータ等を用いて地図情報のデータベース内に記憶することができる。
【0099】
曲率半径演算特性Rchに基づいて、車両位置Pvhにおけるカーブ曲率半径Rvhが演算される。即ち、位置と曲率半径との関係で定義される曲率半径演算特性Rchに車両位置Pvhを入力することによって、車両位置Pvhにおけるカーブ曲率半径Rvhが演算される。
【0100】
計算旋回状態量演算ブロックB18では、演算された曲率半径Rvhに基づいて計算旋回状態量Teが演算される。計算旋回状態量Teとして、以下の状態量を演算することができる。
計算横加速度 Gye=Vx2/Rvh
計算ヨーレイト Yre=Vx/Rvh
計算操舵角度 δfe=〔L・(1+Kh・Vx2)〕/Rvh
計算ステアリングホイール角度 θswe=〔SG・L・(1+Kh・Vx2)〕/Rvh
計算車輪速度差 ΔVwe=(Tr・Vx)/Rvh
計算方位角Yae(カーブ入口手前の直線部の方向に対する車両位置Pvhにおけるカーブの接線方向)
ここで、Khはスタビリティファクタ、Lは車両のホイールベース、Trは車両のトレッド、SGは車両のステアリングギア比である。
【0101】
計算旋回指標演算ブロックB19では、計算旋回状態量Teに基づいて計算旋回指標Seが演算される。上述のように演算されたカーブ曲率半径Rvhそのものを計算旋回指標Seとすることができる。更には、上述のそれぞれの計算旋回指標Seのうちで、2つ以上を組み合わせて計算旋回指標Seを演算することができる。
【0102】
実旋回指標演算ブロックB20では、実旋回状態量Taに基づいて実旋回指標Saが演算される。実旋回指標Sa及び計算旋回指標Seとして、同じ(次元の)物理量(状態量)が演算される。例えば、計算旋回指標Seがカーブ曲率半径Rvhである場合、計算旋回指標Seに対応する実旋回指標Saとして、実旋回状態量Taに基づいてカーブ曲率半径Rtaが演算される。Rtaは、以下の何れかの演算により取得され得る。
Rta=Vx2/Gya
Rta=Vx/Yra
Rta=〔L・(1+Kh・Vx2)〕/δfa
Rta=〔SG・L・(1+Kh・Vx2)〕/θswa
ここで、Khはスタビリティファクタ、Lは車両のホイールベース、SGは車両のステアリングギア比である。
【0103】
比較演算ブロックB21では、計算旋回指標Seと実旋回指標Saとが比較される。比較結果Shとして、実旋回指標Saと計算旋回指標Seとの偏差の絶対値(旋回指標偏差)を使用することができる。
【0104】
可否判定演算ブロックB22では、旋回指標偏差Shに基づいて、上述の「制御パラメータ調整」を許可するか否かが判定される。
【0105】
具体的には、旋回指標偏差Shが所定値Sh1以下である場合、カーブ情報が適切であると判断され、制御フラグSm,Snに「1(実行許可)」が出力される。この結果、「制御パラメータ調整」の実行が許可される。一方、偏差Shが所定値Sh1より大きくなった場合、カーブ情報が不適切と判断され、制御フラグSm,Snに「0(実行禁止)」が出力される。この結果、「制御パラメータ調整」の実行が禁止される。ここで、Sm,Snは、「制御パラメータ調整」の実行の禁止・許可を表す制御フラグであり、「0」は調整の実行の禁止、「1」は調整の実行の許可を表す。
【0106】
「制御パラメータ調整」の実行が既に許可されている場合については、偏差Shが所定値Sh2以下である場合、カーブ情報が適切である判断され、制御フラグSm,Snに「1(実行許可)」が出力される。この結果、「制御パラメータ調整」の実行が継続して許可される。一方、偏差Shが所定値Sh2より大きくなった場合、カーブ情報が不適切と判断され、制御フラグSm,Snに「0(実行禁止)」が出力される。この結果、「制御パラメータ調整」の実行が禁止される。
【0107】
可否判定演算ブロックB22からは、制御フラグSmが、目標制御量演算ブロックB11内における制御開始条件演算ブロックB23内のしきい値Kjの切替演算ブロックB24に出力される。制御フラグSnは、目標制御量演算ブロックB11内における制御量特性選択演算ブロックB25内の目標制御量の切替演算ブロックB26に出力される。
【0108】
しきい値Kjの切替演算ブロックB24では、Sm=0(禁止)のときには、Kj=K2(デフォルト値)が選択され、Sm=1(許可)のときには、判定結果Fgに基づいてブロックB12(図7を参照)で演算されるしきい値Kjが選択され、選択されたしきい値Kjが制御量特性選択演算ブロックB25に出力される。
【0109】
目標制御量の切替演算ブロックB26では、Sn=0(禁止)のときには、第1特性(デフォルト特性、ヨーモーメント重視の特性)が選択され、Sn=1(許可)のときには、判定結果Fgに基づいて選択される特性が選択される。
【0110】
以上のように、実旋回状態量Taから得られる実旋回指標Saと、カーブ情報Rc,Pcに基づいて推定される計算旋回状態量Teから得られる計算旋回指標Seとを比較することで、地図情報等から得られるカーブ情報の適否が確認され得る。そして、カーブ情報が適切な場合(Sm,Sn=1の場合)にのみ、「制御パラメータ調整」(具体的には、しきい値Kjの調整、並びに、目標制御量Bt**の演算特性の切り替え)が許可される。従って、カーブ情報が不適切な場合において、「制御パラメータ調整」がなされて車両が不必要に減速される事態の発生が抑制され得る。
【0111】
また、上記実施形態においては、図10に示すように、セルフアライニングトルク取得手段A8(セルフアライニングトルクセンサATf*)によって取得される車輪のセルフアライニングトルクSatに基づいて、路面摩擦係数演算ブロックB27にて、路面摩擦係数μmaxの演算を行うことができる。
【0112】
車輪の横力が増大していく過程において、セルフアライニングトルクSatも増大していく。この過程において、横力が飽和する状態(即ち、旋回限界状態)に達する前にセルフアライニングトルクSatが最大値となる。このため、車両の旋回が限界に達する前に路面摩擦係数μmaxを推定することができる。
【0113】
セルフアライニングトルクSatの検出については、例えば、特開2008−24073号公報、特開2007−245901号公報、特開2004−233331号公報等に記載された公知の手法の1つを用いることができる。また、セルフアライニングトルクに基づく路面摩擦係数μmaxの演算についても、例えば、特開2007−245901号公報等に記載された公知の手法の1つを利用することができる。
【0114】
路面摩擦係数演算ブロックB27にて、取得されたセルフアライニングトルクSatに基づいて路面摩擦係数μmaxが演算される。演算された路面摩擦係数μmaxは、適正車速演算ブロックB28での適正車速Vq(図6を参照)の演算や、目標車速演算ブロックB29での減速特性(減速度)Gm(図6を参照)の演算に利用され得る。
【図面の簡単な説明】
【0115】
【図1】本発明の実施形態に係る車両安定化制御装置を搭載した車両の概略構成図である。
【図2】カーブの形状の一例を示した図である。
【図3】図2に示したカーブについての曲率半径と旋回状態量の変化の一例を示した図である。
【図4】図1に示した安定化制御装置が実行する安定化制御の概要を説明するための機能ブロック図である。
【図5】図4に示したカーブ通過可否判定手段によるカーブ通過可否の判定値の演算の一例を説明するための機能ブロック図である。
【図6】図4に示したカーブ通過可否判定手段によるカーブ通過可否の判定値の演算の他の例を説明するための機能ブロック図である。
【図7】図4に示した目標制御量演算手段による目標制御量の演算の一例を説明するための機能ブロック図である。
【図8】図4に示した制御手段の車輪ブレーキ制御手段による車輪ブレーキ制御について説明するための機能ブロック図である。
【図9】本発明の実施形態の変形例に係る車両安定化制御装置による、カーブ情報の適否判定、しきい値の調整、並びに、目標制御量の演算特性の切り替えについての処理の一例を説明するための機能ブロック図である。
【図10】本発明の実施形態の変形例に係る車両安定化制御装置により、セルフアライニングトルクにより路面摩擦係数が演算される場合の処理の一例を説明するための機能ブロック図である。
【符号の説明】
【0116】
AP…アクセルペダル、BP…ブレーキペダル、WS**…車輪速度センサ、PW**…制動圧力センサ、SA…ステアリングホイール角度センサ、YR…ヨーレイトセンサ、GY…横加速度センサ、EG…エンジン、TM…変速機、BRK…ブレーキアクチュエータ、ECU…電子制御ユニット、NAV…ナビゲーション装置、GPS…グローバル・ポジショニング・システム、MAP…記憶部
【特許請求の範囲】
【請求項1】
車両の実際の旋回状態を表す実旋回状態量を取得する実旋回状態量取得手段と、
前記実旋回状態量に基づいて、前記車両のアンダステアが抑制されるように前記車両の各車輪の制動力を制御するための前記各車輪の目標制御量を演算する制御量演算手段と、
前記各車輪の目標制御量に基づいて前記各車輪の制動力を制御する制御手段と、
を備えた車両安定化制御装置であって、
前記車両の進行方向前方にあるカーブの形状を取得するカーブ情報取得手段と、
前記車両の速度を取得する車速取得手段と、
前記カーブ形状と前記車両の速度とに基づいて、前記車両が前記カーブを安定して通過できる可能性を判定するカーブ通過可否判定手段と、
を備え、
前記制御量演算手段は、
前記車両が前記カーブを安定して通過できる可能性に応じて前記各車輪の目標制御量を調整するように構成された車両安定化制御装置。
【請求項2】
請求項1に記載の車両安定化制御装置において、
前記カーブ通過可否判定手段は、
前記カーブ形状と前記車両の速度とに基づいて、前記車両に作用する横加速度を演算するとともに、前記演算された横加速度に基づいて前記車両が前記カーブを安定して通過できる可能性を判定するように構成された車両安定化制御装置。
【請求項3】
請求項2に記載の車両安定化制御装置において、
前記カーブ通過可否判定手段は、
前記演算された横加速度が第1所定値以下の場合、前記車両が前記カーブを安定して通過できると判定し、
前記演算された横加速度が前記第1所定値よりも大きい場合、前記演算された横加速度と前記第1所定値との差が大きいほど前記車両が前記カーブを安定して通過できる可能性が低くなるように前記可能性を判定し、
前記演算された横加速度が前記第1所定値よりも大きい第2所定値以上の場合、前記車両が前記カーブを安定して通過できないと判定するように構成された車両安定化制御装置。
【請求項4】
請求項2に記載の車両安定化制御装置において、
前記カーブ通過可否判定手段は、
前記演算された横加速度が第3所定値以下の場合、前記車両が前記カーブを安定して通過できると判定し、
前記演算された横加速度が前記第3所定値よりも大きい場合、前記車両が前記カーブを安定して通過できないと判定するように構成された車両安定化制御装置。
【請求項5】
請求項1に記載の車両安定化制御装置であって、
前記カーブ情報取得手段は、前記カーブ形状に対応する前記カーブ内の位置を取得するように構成されていて、
前記車両の位置を取得する車両位置取得手段と、
前記カーブ形状に対応する位置、前記カーブ形状、及び前記車両位置に基づいて、前記車両が前記カーブを安定して通過するための目標車速を演算する目標車速演算手段と、
を備え、
前記カーブ通過可否判定手段は、
前記目標車速と前記車両の速度との比較結果に基づいて、前記車両が前記カーブを安定して通過できる可能性を判定するように構成された車両安定化制御装置。
【請求項6】
請求項5に記載の車両安定化制御装置において、
前記カーブ通過可否判定手段は、
前記車両の速度から前記目標車速を減じて得られる車速偏差が第4所定値以下の場合、前記車両が前記カーブを安定して通過できると判定し、
前記車速偏差が前記第4所定値よりも大きい場合、前記車速偏差が大きいほど前記車両が前記カーブを安定して通過できる可能性が低くなるように前記可能性を判定し、
前記車速偏差が前記第4所定値よりも大きい第5所定値以上の場合、前記車両が前記カーブを安定して通過できないと判定するように構成された車両安定化制御装置。
【請求項7】
請求項5に記載の車両安定化制御装置において、
前記カーブ通過可否判定手段は、
前記車両の速度から前記目標車速を減じて得られる車速偏差が第6所定値以下の場合、前記車両が前記カーブを安定して通過できると判定し、
前記車速偏差が前記第6所定値よりも大きい場合、前記車両が前記カーブを安定して通過できないと判定するように構成された車両安定化制御装置。
【請求項8】
請求項1乃至請求項7の何れか一項に記載の車両安定化制御装置であって、
前記車両の操向車輪の舵角に相当する値を取得する舵角取得手段と、
前記車両の速度と前記舵角に相当する値とに基づいて、前記実旋回状態量に対応する目標旋回状態量を演算する目標旋回状態量演算手段と、
前記目標旋回状態量と前記実旋回状態量とを比較することで前記車両のステア特性を表すステア特性値を演算するステア特性値演算手段と、
を備え、
前記制御量演算手段は、
前記ステア特性値がしきい値以下の場合に前記各車輪の目標制御量をゼロに演算し、前記ステア特性値が前記しきい値よりも大きい場合に前記各車輪の目標制御量をゼロより大きい値に演算するとともに、
前記車両が前記カーブを安定して通過できる可能性が低いほど、前記しきい値をより小さい値に設定するように構成された車両安定化制御装置。
【請求項9】
請求項1乃至請求項8の何れか一項に記載の車両安定化制御装置において、
前記制御量演算手段は、
前記各車輪の目標制御量の演算について、前記車両の減速よりも前記車両へのヨーモーメントの付与を優先する第1演算特性と、前記車両へのヨーモーメントの付与よりも前記車両の減速を優先する第2演算特性と、を備えるとともに、
前記車両が前記カーブを安定して通過できる可能性が高い場合には前記第1演算特性を使用して前記各車輪の目標制御量を演算し、前記車両が前記カーブを安定して通過できる可能性が低い場合には前記第2演算特性を使用して前記各車輪の目標制御量を演算するように構成された車両安定化制御装置。
【請求項1】
車両の実際の旋回状態を表す実旋回状態量を取得する実旋回状態量取得手段と、
前記実旋回状態量に基づいて、前記車両のアンダステアが抑制されるように前記車両の各車輪の制動力を制御するための前記各車輪の目標制御量を演算する制御量演算手段と、
前記各車輪の目標制御量に基づいて前記各車輪の制動力を制御する制御手段と、
を備えた車両安定化制御装置であって、
前記車両の進行方向前方にあるカーブの形状を取得するカーブ情報取得手段と、
前記車両の速度を取得する車速取得手段と、
前記カーブ形状と前記車両の速度とに基づいて、前記車両が前記カーブを安定して通過できる可能性を判定するカーブ通過可否判定手段と、
を備え、
前記制御量演算手段は、
前記車両が前記カーブを安定して通過できる可能性に応じて前記各車輪の目標制御量を調整するように構成された車両安定化制御装置。
【請求項2】
請求項1に記載の車両安定化制御装置において、
前記カーブ通過可否判定手段は、
前記カーブ形状と前記車両の速度とに基づいて、前記車両に作用する横加速度を演算するとともに、前記演算された横加速度に基づいて前記車両が前記カーブを安定して通過できる可能性を判定するように構成された車両安定化制御装置。
【請求項3】
請求項2に記載の車両安定化制御装置において、
前記カーブ通過可否判定手段は、
前記演算された横加速度が第1所定値以下の場合、前記車両が前記カーブを安定して通過できると判定し、
前記演算された横加速度が前記第1所定値よりも大きい場合、前記演算された横加速度と前記第1所定値との差が大きいほど前記車両が前記カーブを安定して通過できる可能性が低くなるように前記可能性を判定し、
前記演算された横加速度が前記第1所定値よりも大きい第2所定値以上の場合、前記車両が前記カーブを安定して通過できないと判定するように構成された車両安定化制御装置。
【請求項4】
請求項2に記載の車両安定化制御装置において、
前記カーブ通過可否判定手段は、
前記演算された横加速度が第3所定値以下の場合、前記車両が前記カーブを安定して通過できると判定し、
前記演算された横加速度が前記第3所定値よりも大きい場合、前記車両が前記カーブを安定して通過できないと判定するように構成された車両安定化制御装置。
【請求項5】
請求項1に記載の車両安定化制御装置であって、
前記カーブ情報取得手段は、前記カーブ形状に対応する前記カーブ内の位置を取得するように構成されていて、
前記車両の位置を取得する車両位置取得手段と、
前記カーブ形状に対応する位置、前記カーブ形状、及び前記車両位置に基づいて、前記車両が前記カーブを安定して通過するための目標車速を演算する目標車速演算手段と、
を備え、
前記カーブ通過可否判定手段は、
前記目標車速と前記車両の速度との比較結果に基づいて、前記車両が前記カーブを安定して通過できる可能性を判定するように構成された車両安定化制御装置。
【請求項6】
請求項5に記載の車両安定化制御装置において、
前記カーブ通過可否判定手段は、
前記車両の速度から前記目標車速を減じて得られる車速偏差が第4所定値以下の場合、前記車両が前記カーブを安定して通過できると判定し、
前記車速偏差が前記第4所定値よりも大きい場合、前記車速偏差が大きいほど前記車両が前記カーブを安定して通過できる可能性が低くなるように前記可能性を判定し、
前記車速偏差が前記第4所定値よりも大きい第5所定値以上の場合、前記車両が前記カーブを安定して通過できないと判定するように構成された車両安定化制御装置。
【請求項7】
請求項5に記載の車両安定化制御装置において、
前記カーブ通過可否判定手段は、
前記車両の速度から前記目標車速を減じて得られる車速偏差が第6所定値以下の場合、前記車両が前記カーブを安定して通過できると判定し、
前記車速偏差が前記第6所定値よりも大きい場合、前記車両が前記カーブを安定して通過できないと判定するように構成された車両安定化制御装置。
【請求項8】
請求項1乃至請求項7の何れか一項に記載の車両安定化制御装置であって、
前記車両の操向車輪の舵角に相当する値を取得する舵角取得手段と、
前記車両の速度と前記舵角に相当する値とに基づいて、前記実旋回状態量に対応する目標旋回状態量を演算する目標旋回状態量演算手段と、
前記目標旋回状態量と前記実旋回状態量とを比較することで前記車両のステア特性を表すステア特性値を演算するステア特性値演算手段と、
を備え、
前記制御量演算手段は、
前記ステア特性値がしきい値以下の場合に前記各車輪の目標制御量をゼロに演算し、前記ステア特性値が前記しきい値よりも大きい場合に前記各車輪の目標制御量をゼロより大きい値に演算するとともに、
前記車両が前記カーブを安定して通過できる可能性が低いほど、前記しきい値をより小さい値に設定するように構成された車両安定化制御装置。
【請求項9】
請求項1乃至請求項8の何れか一項に記載の車両安定化制御装置において、
前記制御量演算手段は、
前記各車輪の目標制御量の演算について、前記車両の減速よりも前記車両へのヨーモーメントの付与を優先する第1演算特性と、前記車両へのヨーモーメントの付与よりも前記車両の減速を優先する第2演算特性と、を備えるとともに、
前記車両が前記カーブを安定して通過できる可能性が高い場合には前記第1演算特性を使用して前記各車輪の目標制御量を演算し、前記車両が前記カーブを安定して通過できる可能性が低い場合には前記第2演算特性を使用して前記各車輪の目標制御量を演算するように構成された車両安定化制御装置。
【図1】



【図2】
【図3】
【図4】

【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−105453(P2010−105453A)
【公開日】平成22年5月13日(2010.5.13)
【国際特許分類】
【出願番号】特願2008−277467(P2008−277467)
【出願日】平成20年10月28日(2008.10.28)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成22年5月13日(2010.5.13)
【国際特許分類】
【出願日】平成20年10月28日(2008.10.28)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]