
車両寸法検出システム

【課題】車両通過帯を通過する車両の寸法を検出すること。
【解決手段】車両通過帯170の側方に設けられて、当該車両通過帯170を通過する車両190を映す鏡130と、車両通過帯170の上方に設けられて、当該車両通過帯170を通過する車両190と、鏡130に映った当該車両190の鏡像とを撮像する撮像装置150と、撮像装置150と電気的に接続されて、撮像装置150が撮像した画像における、車両190の実像の輪郭線上の特徴的な複数の実像点と、鏡130に映った当該車両190の鏡像の輪郭線上の特徴的な複数の鏡像点とに基づいて、当該車両190の寸法を演算により求める演算装置110とを備える。
【解決手段】車両通過帯170の側方に設けられて、当該車両通過帯170を通過する車両190を映す鏡130と、車両通過帯170の上方に設けられて、当該車両通過帯170を通過する車両190と、鏡130に映った当該車両190の鏡像とを撮像する撮像装置150と、撮像装置150と電気的に接続されて、撮像装置150が撮像した画像における、車両190の実像の輪郭線上の特徴的な複数の実像点と、鏡130に映った当該車両190の鏡像の輪郭線上の特徴的な複数の鏡像点とに基づいて、当該車両190の寸法を演算により求める演算装置110とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両寸法検出システムに関する。特に本発明は、車両通過帯を通過する車両の寸法を検出する車両寸法検出システムに関する。
【背景技術】
【0002】
有料道路の料金所では、車両の大きさに応じた通行料金を徴収している。そのために、料金所には、通行車両の寸法を検出するための車両寸法検出システムが設けられている。既知の車両寸法検出システムでは、複数のセンサを用いて、通行車両の車高、車幅、及び車長を、それぞれ検出している。
【0003】
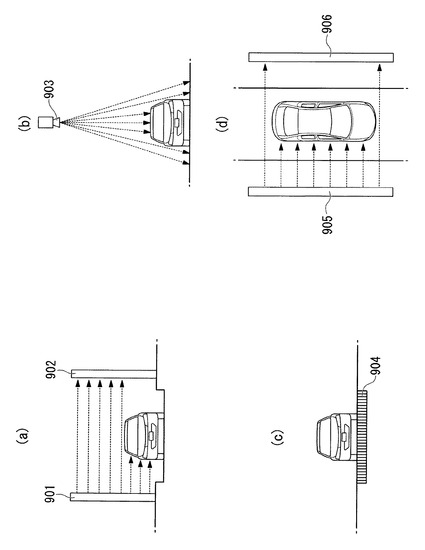
図16は、既知の車両寸法検出システムの構造を模式的に示す。既知の車両寸法検出システムでは、図16(a)に示すように、道路の側方に立設された光センサ装置901、902を用いて車両の車高を検出している。具体的には、光センサ装置901は、道路の一方の側方に立設されている。そして、光センサ装置901には、複数の光送信機が高さ方向に並べて取り付けられている。これに対して、光センサ装置902は、光センサ装置901と向き合うようにして、道路の他方の側方に立設されている。そして、光センサ装置902には、複数の光受信機が高さ方向に並べて取り付けられている。そして、光センサ装置901に取り付けられている各光送信機から送信された光は、光センサ装置902に取り付けられている各光受信機で受信されるようになっている。このような既知の車両寸法検出システムでは、光センサ装置901と光センサ装置902とが設けられている間の道路を車両が通過すると、光センサ装置901に取り付けられた光送信機から送信された光が車両によって遮られて、光センサ装置902に取り付けられた光受信機で受信されないことになる。そこで、この既知の車両寸法検出システムでは、車両に遮られて光を受信することができなかった光受信機の数に基づいて、その車両の車高を検出している。
【0004】
また、既知の車両寸法検出システムでは、図16(b)に示すように、道路の上方に設けられたレーザセンサ装置903を用いて車両の車幅を検出している。具体的には、レーザセンサ装置903は、道路の幅方向に広がるようなレーザ光を、道路の上方から放射している。このような既知の車両寸法検出システムでは、レーザセンサ装置903の下方の道路を車両が通過すると、レーザセンサ装置903から放射されたレーザ光が車両によって遮られることになる。そこで、この既知の車両寸法検出システムでは、車両に遮られたレーザ光の量に基づいて、その車両の車幅を検出している。
【0005】
また、既知の車両寸法検出システムでは、図16(c)に示すように、道路に敷設された荷重センサ装置904を用いて車両の車幅を検出している。この既知の車両検出システムでは、荷重センサ904の上を車両が通過すると、車両のタイヤの位置が検出されることになる。そこで、この既知の車両寸法検出システムでは、検出された車両のタイヤの位置に基づいて、その車両の車幅を検出している。
【0006】
また、既知の車両寸法検出システムでは、図16(d)に示すように、道路の側方に配設された光センサ装置905、906を用いて車両の車長を検出している。具体的には、光センサ装置905は、道路の一方の側方に、道路と平行に配設されている。そして、光センサ905には、複数の光送信機が長さ方向に並べて取り付けられている。これに対して、光センサ装置906は、光センサ装置905と向き合うようにして、道路の他方の側方に配設されている。そして、光センサ装置906には、複数の光受信機が長さ方向に並べて取り付けられている。そして、光センサ装置905に取り付けられている各光送信機から送信された光は、光センサ装置906に取り付けられている各光受信機で受信されるようになっている。このような既知の車両寸法検出システムでは、光センサ装置905と光センサ装置906との間の道路を車両が通過すると、光センサ装置905に取り付けられた光送信機から送信された光が車両によって遮られて、光センサ装置906に取り付けられた光受信機で受信されないことになる。そこで、この既知の車両寸法検出システムでは、車両に遮られた光を受信することができなかった光受信機の数に基づいて、その車両の車長を検出している。
【0007】
また、車両の寸法を検出する別の技術としては、走行レーンの上方から走行する車両の前後方向及び幅方向に距離測定用のレーザ光をそれぞれ走査すると共に、これらレーザ光の反射レーザ光を受光しその走査角度と反射レーザ光の到達時間から距離を計測して車長、車高及び車幅を求める技術が知られている(例えば、特許文献1参照。)。この技術においては、予め入力された車種区分データから車両区分を判断して、車両区分や車両区分から得られる車両情報を出力する。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許第3363763号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
上記の既知の車両寸法検出システムや、特許文献1に記載の技術では、道路を走行している車両の車高、車幅、及び車長を検出することができる。しかしながら、これらのシステムや技術では、車両の車高、車幅、及び車長を検出するのに、大掛かりなセンサ装置やレーザ測距装置等が必要となり、高コストとなってしまう。
【課題を解決するための手段】
【0010】
上記課題を解決するために、本発明の第1の形態によると、車両通過帯を通過する車両の寸法を検出する車両寸法検出システムであって、車両通過帯の側方に設けられて、当該車両通過帯を通過する車両を映す鏡と、車両通過帯の上方に設けられて、当該車両通過帯を通過する車両と、鏡に映った当該車両の鏡像とを撮像する撮像装置と、撮像装置と電気的に接続されて、撮像装置が撮像した画像における、車両の実像の輪郭線上の特徴的な複数の実像点と、鏡に映った当該車両の鏡像の輪郭線上の特徴的な複数の鏡像点とに基づいて、当該車両の寸法を演算により求める演算装置とを備える。
【0011】
鏡は、車両通過帯の延在方向と平行に配置された第1の鏡面と、第1の鏡面よりも車両の進入方向側に第1の鏡面と並べて配置された第2の鏡面と、第1の鏡面よりも車両の進出方向側に第1の鏡面と並べて配置された第3の鏡面とのうち、いずれか一方又は両方の鏡面とを有し、第1の鏡面、第2の鏡面、及び第3の鏡面は、それぞれ、鉛直方向において、車両通過帯の反対側に倒れるような角度を有して配置されており、第2の鏡面、及び第3の鏡面は、それぞれ、水平方向において、第1の鏡面の端部から離れるほど、車両通過帯から離れるような角度を更に有して配置されていてよい。
【0012】
第1の鏡面は、鉛直方向において並んで配列される複数の鏡面に分割され、当該分割された各鏡面は、水平方向から入射した光が撮像装置に向かって反射するように、水平面に対して、それぞれ異なる角度を有していてよい。
【0013】
演算装置は、少なくとも、撮像装置が撮像した画像における、第1の鏡面に映った車両の鏡像の輪郭線上の、少なくとも、車両の上端部に対応する第1の鏡像点を特定する鏡像点特定部と、鏡像点特定部が特定した第1の鏡像点に対応する第1の鏡面上の位置と撮像装置の位置との相対的な位置関係に基づいて、少なくとも、車両の車高を算出する車両寸法算出部とを有してよい。
【0014】
演算装置は、撮像装置が撮像した画像における、車両の実像の輪郭線上の、少なくとも、車両の一方の側端部に対応する第1の実像点と、車両の他方の側端部に対応する第2の実像点とを特定する実像点特定部を更に有し、車両寸法算出部は、実像点特定部が特定した第1の実像点及び第2の実像点にそれぞれに対応する車両上の各位置と撮像装置の位置との相対的な位置関係に更に基づいて、車両の車幅を更に算出してよい。
【0015】
鏡が第1の鏡面及び第2の鏡面だけを有している場合、鏡像点特定部は、撮像装置が撮像した画像における、第1の鏡面に映った車両の鏡像の輪郭線上の、車両の前端部の上端部に対応する第2の鏡像点と、第2の鏡面に映った車両の鏡像の輪郭線上の、車両の後端部に対応する第3の鏡像点とを更に特定し、実像点特定部は、撮像装置が撮像した画像における、車両の実像の輪郭線上の、車両の前端部に対応する第3の実像点を特定し、車両寸法算出部は、鏡像点特定部が特定した第2の鏡像点に対応する第1の鏡面上の位置と撮像装置の位置との相対的な位置関係と、鏡像点特定部が特定した第3の鏡像点に対応する第2の鏡面上の位置と撮像装置の位置との相対的な位置関係と、実像点特定部が特定した第3の実像点に対応する車両上の位置と撮像装置の位置との相対的な位置関係とに更に基づいて、車両の車長を更に算出してよい。
【0016】
鏡が第1の鏡面及び第3の鏡面だけを有している場合、鏡像点特定部は、撮像装置が撮像した画像における、第1の鏡面に映った車両の鏡像の輪郭線上の、車両の後端部の上端部に対応する第4の鏡像点と、第3の鏡面に映った車両の鏡像の輪郭線上の、車両の前端部に対応する第5の鏡像点とを更に特定し、実像点特定部は、撮像装置が撮像した画像における、車両の実像の輪郭線上の、車両の後端部に対応する第4の実像点を特定し、車両寸法算出部は、鏡像点特定部が特定した第4の鏡像点に対応する第1の鏡面上の位置と撮像装置の位置との相対的な位置関係と、鏡像点特定部が特定した第5の鏡像点に対応する第3の鏡面上の位置と撮像装置の位置との相対的な位置関係と、実像点特定部が特定した第4の実像点に対応する車両上の位置と撮像装置の位置との相対的な位置関係とに更に基づいて、車両の車長を更に算出してよい。
【0017】
鏡が第1の鏡面と第2の鏡面と第3の鏡面とを有している場合、鏡像点特定部は、撮像装置が撮像した画像における、第2の鏡面に映った車両の鏡像の輪郭線上の、車両の後端部に対応する第3の鏡像点と、第3の鏡面に映った車両の鏡像の輪郭線上の、車両の前端部に対応する第5の鏡像点とを更に特定し、車両寸法算出部は、鏡像点特定部が特定した第3の鏡像点に対応する第2の鏡面上の位置と撮像装置の位置との相対的な位置関係と、鏡像点特定部が特定した第5の鏡像点に対応する第3の鏡面上の位置と撮像装置の位置との相対的な位置関係とに更に基づいて、車両の車長を更に算出してよい。
【0018】
撮像装置の撮像範囲に赤外線を照射する赤外線照明を更に備え、撮像装置は、車両通過帯を通過する車両と、鏡に映った当該車両の鏡像とを、赤外線だけを透過させるフィルターを通して撮像してよい。
【0019】
車両通過帯と鏡との間に設けられて、赤外線だけを透過させる壁体を更に備えてよい。
【0020】
なおまた、上記のように発明の概要は、本発明の必要な特徴の全てを列挙したものではなく、これらの特徴群のサブコンビネーションもまた、発明となり得る。
【発明の効果】
【0021】
以上の説明から明らかなように、この発明においては、鏡と撮像装置と、車両の寸法を演算するための演算装置だけのハードウェアで、車両通過帯を通過している車両の寸法を検出することができるので、低コストにてシステムを実現することができる。
【図面の簡単な説明】
【0022】
【図1】一実施形態に係る車両寸法検出システム100の利用環境の一例を示す図である。
【図2】一実施形態に係る車両寸法検出システム100の利用環境の一例を示す図である。
【図3】図1のデジタルカメラ150が撮像した画像の一例を示す図である。
【図4】演算装置110のブロック構成の一例を示す図である。
【図5】鏡130、自動車190、及びデジタルカメラ150の相対的な位置関係を示す図である。
【図6】鏡130、自動車190、及びデジタルカメラ150の相対的な位置関係を示す図である。
【図7】自動車190及びデジタルカメラ150の相対的な位置関係を示す図である。
【図8】演算装置110の動作フローの一例を示す図である。
【図9】別の実施形態に係る車両寸法検出システム200の利用環境の一例を示す図である。
【図10】別の実施形態に係る車両寸法検出システム200の利用環境の一例を示す図である。
【図11】デジタルカメラ250が撮像した画像I2の一例を示す図である。
【図12】更に別の実施形態に係る車両寸法検出システム200の利用環境の一例を示す図である。
【図13】更に別の実施形態に係る車両寸法検出システム200の利用環境の一例を示す図である。
【図14】デジタルカメラ350が撮像した画像I3の一例を示す図である。
【図15】演算装置110のハードウェア構成の一例を示す図である。
【図16】既知の車両寸法検出システムの構造を模式的に示す図である。
【発明を実施するための形態】
【0023】
以下、発明の実施の形態を通じて本発明を説明するが、以下の実施形態は、特許請求の範囲にかかる発明を限定するものではなく、また、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
【0024】
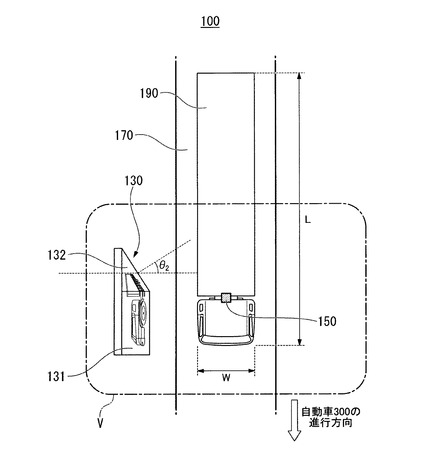
図1及び図2は、一実施形態に係る車両寸法検出システム100の利用環境の一例を示す。具体的には、図1は、高速道路170を、自動車190の進行方向側から見た状態を示す。また、図2は、高速道路170を、上方から見た状態を示す。車両寸法検出システム100は、高速道路170を走行する自動車190の車高H、車幅W、及び車長Lを検出するシステムである。具体的には、車両寸法検出システム100は、高速道路170の料金所の手前の位置において、高速道路170を走行する自動車190の車高H、車幅W、及び車長Lを検出する。そして、車両寸法検出システム100によって検出された自動車190の車高H、車幅W、及び車長Lは、自動車190の種別を特定するために利用される。そして、特定された自動車190の種別の情報は、高速道路300の料金所において、自動車190の種別毎に異なる料金を適用して収受するために利用される。なお、高速道路170は、この発明における「車両通過帯」の一例であってよい。また、自動車190は、この発明における「車両」の一例であってよい。また、車高H、車幅W、及び車長Lは、この発明における「寸法」の一例であってよい。
【0025】
車両寸法検出システム100は、演算装置110、鏡130、及びデジタルカメラ150を備える。演算装置110は、デジタルカメラ150と電気的に接続されている。また、演算装置110は、図示しない料金所の各種機器と電気的に接続されている。なお、デジタルカメラ150は、この発明における「撮像装置」の一例であってよい。
【0026】
鏡130は、光の反射を利用して形や姿を映して見る道具である。鏡130は、高速道路170の側方に設けられている。鏡130は、2つの鏡面131、132を有している。各鏡面131、132は、鉛直方向において、高速道路170の反対側に倒れるような角度θ1を有して配置されている。また、各鏡面131、132は、水平方向において、それぞれ異なる方向を向くように配置されている。具体的には、鏡面131は、高速道路170の延在方向と平行に配置されている。鏡面132は、鏡面131よりも自動車190の進入方向側に、鏡面131と並べて配置されている。そして、鏡面132は、水平方向において、鏡面131から離れるほど、高速道路170から離れるような角度θ2を有して配置されている。ここで、θ2は、高速道路170の延在方向と直行する鉛直線と、鏡面132の法線方向の鉛直線とが成す角度である。なお、鏡面131は、この発明における「第1の鏡面」の一例であってよい。また、鏡面132は、この発明における「第2の鏡面」の一例であってよい。
【0027】
また、鏡面131は、鉛直方向において並んで配列される複数の鏡面131a、b、c、・・・に分割されている。そして、各鏡面131a、b、c、・・・は、水平方向から入射した光がデジタルカメラ150のレンズに向かって反射するように、それぞれ異なる角度を有している。
【0028】
デジタルカメラ150は、CCD(Charge Coupled Devices)やCMOS(Complementary Metal Oxide Semiconductor)等の光に反応する半導体素子を使って映像を電気信号に変換し、デジタルデータとしてフラッシュメモリ等の記憶媒体に記憶する装置である。デジタルカメラ150は、鏡130の全体と、高速道路170の幅方向の全体とが撮像範囲Vに入るようにして設けられる。また、デジタルカメラ150は、演算装置110と電気的に接続されている。そして、デジタルカメラ150は、微小時間置きに撮像処理を行い、撮像した画像のデジタルデータを、演算装置110へ順次出力する。
【0029】
演算装置110は、デジタルカメラ150から順次出力される画像のデジタルデータの入力を受け付けると、その画像において、鏡130の鏡面131に、自動車190の前端部が映っているか否かを判定する。そして、演算装置110は、自動車190の前端部が映っていると判定すると、その画像を用いて、自動車190の車高H、車幅W、及び車長Lを演算により求める。具体的には、演算装置110は、その画像における、自動車190の実像の輪郭線において特徴的な複数の点と、鏡130に映った自動車190の鏡像の輪郭線において特徴的な複数の点とに基づいて、自動車190の車高H、車幅W、及び車長Lを演算により求める。
【0030】
このように、車両寸法検出システム100においては、鏡130と、デジタルカメラ150と、演算装置110だけのハードウェアで、道路170を走行している自動車190の車高H、車幅W、車長Lを検出することができるので、低コストにてシステムを実現することができる。
【0031】
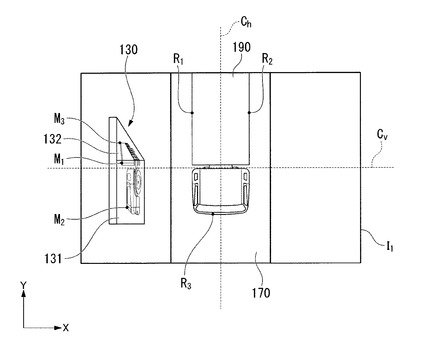
図3は、デジタルカメラ150が撮像した画像I1の一例を示す。演算装置110は、画像I1における、鏡面131に映った自動車190の鏡像の輪郭線上の、自動車190の上端部に対応する点M1を特定する。そして、演算装置110は、点M1に対応する鏡面131上の位置と、デジタルカメラ150の位置との相対的な関係に基づいて、自動車190の車高Hを算出する。なお、点M1は、この発明における「第1の鏡像点」の一例であってよい。
【0032】
また、演算装置110は、画像I1における、自動車190の実像の輪郭線上の、自動車190の一方の側端部に対応する点R1と、自動車190の他方の側端部に対応する点R2とを特定する。そして、演算装置110は、点R1及び点R2にそれぞれ対応する自動車190上の各位置とデジタルカメラ150の位置との相対的な位置関係とに更に基づいて、自動車190の車幅Wを算出する。なお、点R1は、この発明における「第1の実像点」の一例であってよい。また、点R2は、この発明における「第2の実像点」の一例であってよい。
【0033】
また、演算装置110は、画像I1における鏡面131に映った自動車190の鏡像の輪郭線上の、自動車190の前端部の上端部に対応する点M2と、鏡面132に映った自動車190の鏡像の輪郭線上の、自動車190の後端部(図示せず)に対応する点M3とを更に特定する。また、演算装置110は、画像I1における、自動車190の実像の輪郭線上の、自動車190の前端部に対応する点R3を更に特定する。そして、演算装置110は、点M2に対対応する鏡面131上の位置とデジタルカメラ150の位置との相対的な位置関係と、点M3に対応する鏡面132上の位置とデジタルカメラ150の位置との相対的な位置関係と、点R3に対応する自動車190上の位置とデジタルカメラ150の位置との相対的な位置関係とに更に基づいて、自動車190の車長Lを更に算出する。なお、点M2は、この発明における「第2の鏡像点」の一例であってよい。また、点M3は、この発明における「第3の鏡像点」の一例であってよい。また、点R3は、この発明における「第3の実像点」の一例であってよい。
【0034】
このように、車両寸法検出システム100においては、デジタルカメラ150が撮像した画像に自動車190の後端部が写っていなくても、その自動車190の車高H、車幅W、車長Lを検出することができる。
【0035】
なお、本実施形態においては、説明が煩雑になることを防ぐことを目的として、車両寸法検出システム100が一の演算装置110を備える構成について説明したが、車両寸法検出システム100は、複数の演算装置110を備えてよい。
【0036】
図4は、演算装置110のブロック構成の一例を示す。演算装置110は、画像データ入力受付部111、画像判定部112、鏡像点特定部113、実像点特定部114、車両寸法算出部115、及び車両寸法データ送信部116を有する。以下、各構成要素の機能及び動作を説明する。
【0037】
画像データ入力受付部111は、デジタルカメラ150から順次出力された画像データの入力を順次受け付ける。具体的には、画像データ入力受付部111は、デジタルカメラ150から順次出力された画像データの入力を順次受け付けると、その画像データを、画像判定部112へ順次送る。
【0038】
画像判定部112は、デジタルカメラ150が撮像した画像において、鏡130の鏡面131に、自動車190の前端部が映っているか否かを判定する。具体的には、画像判定部112は、画像データを、画像データ入力受付部111から受け取る度に、その画像において、鏡130の鏡面131に、自動車190の前端部が映っているか否かを、画像処理によって判定する。そして、画像判定部112は、画像データ入力受付部111から受け取った画像において、鏡130の鏡面131に、自動車190の前端部が映っていると判定すると、その画像データを、鏡像点特定部113、実像点特定部114、及び車両寸法算出部115へ送る。そして、画像判定部112は、一の画像データを、鏡像点特定部113、実像点特定部114、及び車両寸法算出部115へ送ると、画像データ入力受付部111から受け取った画像において、鏡130の鏡面131に、自動車190の前端部が映っていないと判定されるまで、その画像データを破棄する。また、画像判定部112は、画像データ入力受付部111から受け取った画像において、鏡130の鏡面131に、自動車190の前端部が映っていないと判定すると、その画像データを破棄する。
【0039】
鏡像点特定部113は、デジタルカメラ150が撮像した画像における、鏡130に映った自動車190の鏡像の輪郭線上の特徴的な複数の点を特定する。具体的には、鏡像点特定部113は、画像データを、画像判定部112から受け取ると、その画像I1における、鏡面131に映った自動車190の鏡像の輪郭線上の、自動車190の上端部に対応する点M1を、画像処理によって特定する。また、鏡像点特定部113は、画像I1における、鏡面131に映った自動車190の鏡像の輪郭線上の、自動車190の前端部の上端部に対応する点M2を、画像処理によって特定する。また、鏡像点特定部113は、画像I1における、鏡面132に映った自動車190の鏡像の輪郭線上の、自動車190の後端部に対応する点M3を、画像処理によって特定する。そして、鏡像点特定部113は、特定した各点M1、M2、M3の画像上の座標を示すデータを、車両寸法算出部115へ送る。
【0040】
実像点特定部114は、デジタルカメラ150が撮像した画像における、自動車190の実像の輪郭線上の特徴的な複数の点を特定する。具体的には、実像点特定部114は、画像データを、画像判定部112から受け取ると、その画像I1における、自動車190の実像の輪郭線上の、自動車190の一方の側端部に対応する点R1と、自動車190の他方の側端部に対応する点R2とを特定する。また、実像点特定部114は、画像I1における、自動車190の実像の輪郭線上の、自動車190の前端部に対応する点R3を特定する。そして、実像点特定部114は、特定した各点R1、R2、R3の画像上の座標を示すデータを、車両寸法算出部115へ送る。
【0041】
車両寸法算出部115は、自動車190の車高H、車幅W、及び車長Lを演算により求める。具体的には、車両寸法算出部115は、画像データを、画像判定部112から受け取る。また、車両寸法算出部115は、画像I1における、自動車190の鏡像の輪郭線上の各点M1、M2、M3の画像上の座標を示すデータを、鏡像点特定部113から受け取る。また、車両寸法算出部115は、画像I1における、自動車190の実像の輪郭線上の各点R1、R2、R3の画像上の座標を示すデータを、実像点特定部114から受け取る。そして、車両寸法算出部115は、画像データと、点M1の画像上の座標を示すデータとを用いて、点M1に対応する鏡面131上の位置とデジタルカメラ150の位置との相対的な位置関係に基づいて、自動車190の車高Hを算出する。また、車両寸法算出部115は、画像データと、各点R1、R2の画像上の座標を示すデータとを更に用いて、各点R1、R2にそれぞれ対応する自動車190上の位置とデジタルカメラ150の位置との相対的な位置関係に更に基づいて、自動車190の車幅Wを算出する。また、車両寸法算出部115は、画像データと、各点M2、M3、R3の画像上の座標を示すデータとを更に用いて、点M2に対応する鏡面131上の位置とデジタルカメラ150の位置との相対的な位置関係と、点M3に対応する鏡面132上の位置とデジタルカメラ150の位置との相対的な位置関係と、点R3に対応する自動車190上の位置とデジタルカメラ150の位置との相対的な位置関係とに更に基づいて、自動車190の車長Lを算出する。そして、車両寸法算出部115は、算出した自動車190の車高H、車幅W、及び車長Lを示すデータを、車両寸法データ送信部116へ送る。
【0042】
車両寸法データ送信部116は、自動車190の車高H、車幅W、及び車長Lを示すデータを、料金所の各種機器へ送信する。具体的には、車両寸法データ送信部116は、自動車190の車高H、車幅W、及び車長Lを示すデータを、車両寸法算出部115から受け取ると、そのデータを、料金所の各種機器へ送信する。
【0043】
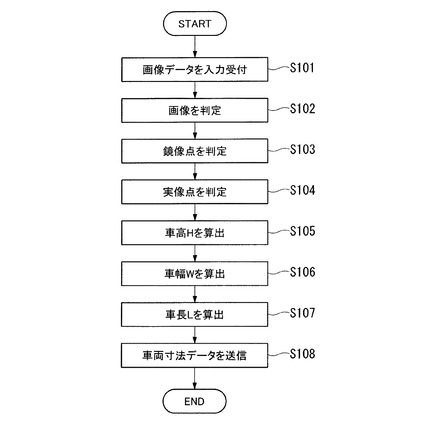
図8は、演算装置110の動作フローの一例を示す。この動作フローの説明においては、図1から図7を共に参照する。なお、図5から図7は、鏡130、自動車190、及びデジタルカメラ150の相対的な位置関係を示す。具体的には、図5は、高速道路170を、自動車190の進行方向側から見た状態を示す。また、図6は、高速道路170を、上方から見た状態を示す。また、図7は、高速道路170を、鏡130が設けられていない側方から見た状態を示す。
【0044】
車両寸法検出システム100においては、デジタルカメラ150は、微小時間毎に撮像を繰り返し、撮像した画像のデジタルデータを、演算装置110へ順次出力する。演算装置110の画像データ入力受付部111は、デジタルカメラ150から順次出力された画像データの入力を順次受け付けると(S101)、その画像データを、画像判定部112へ順次送る。
【0045】
そして、演算装置110の画像判定部112は、画像データを、画像データ入力受付部111から受け取る度に、その画像において、鏡130の鏡面131に、自動車190の前端部が映っているか否かを、画像処理によって判定する(S102)。そして、画像判定部112は、画像データ入力受付部111から受け取った画像において、鏡130の鏡面131に、自動車190の前端部が映っていると判定すると、その画像データを、鏡像点特定部113、実像点特定部114、及び車両寸法算出部115へ送る。そして、画像判定部112は、一の画像データを、鏡像点特定部113、実像点特定部114、及び車両寸法算出部115へ送ると、画像データ入力受付部111から受け取った画像において、鏡130の鏡面131に、自動車190の前端部が映っていないと判定されるまで、その画像データを破棄する。また、画像判定部112は、画像データ入力受付部111から受け取った画像において、鏡130の鏡面131に、自動車190の前端部が映っていないと判定すると、その画像データを破棄する。画像判定部112のこのような処理によって、車両寸法検出システム100においては、鏡130の鏡面131に、自動車190の前端部が映っている画像を用いて、自動車190の車高H、車幅W、及び車長Lが算出される。また、画像判定部112のこのような処理によって、車両寸法検出システム100においては、自動車190の車高H、車幅W、及び車長Lの算出のために画像が用いられると、その後に撮像された画像に同じ自動車190が映っていても、その画像データは破棄される。そして、画像判定部112のこのような処理によって、車両寸法検出システム100においては、鏡130の鏡面131に、その後に通過する自動車190の前端部が映っている画像があると、その画像を用いて、自動車190の車高H、車幅W、及び車長Lが算出されることになる。この動作フローにおいては、画像判定部112が、図3に示すような画像データを、画像データ入力受付部111から受け取り、鏡130の鏡面131に、自動車190の前端部が映っていると判定したと仮定する。
【0046】
そして、演算装置110の鏡像点特定部113は、画像データを、画像判定部112から受け取ると、その画像I1における、鏡130に映った自動車190の鏡像の輪郭線上の特徴的な複数の点を特定する(S103)。
【0047】
具体的には、鏡像点特定部113は、画像I1における、鏡面131に映った自動車190の鏡像の輪郭線上の、自動車190の上端部に対応する点M1を、画像処理によって特定する。例えば、鏡像点特定部113は、鏡面131の位置とデジタルカメラ150の位置との相対的な位置関係が変わらないことから、画像I1における所定の領域を、鏡面131が写っている領域として認識する。そして、鏡像点特定部113は、その鏡面131が写っている領域内において、鏡面131に何ら映っていない場合と比較して、変化のあった領域を、自動車190の鏡像が写っている領域として認識する。そして、鏡像点特定部113は、鏡面131が写っている領域内において、自動車190の鏡像が写っている領域の輪郭線上の、画像I1をX方向に二分する中心線Chからの最短距離が最も遠い点を、自動車190の上端部に対応する点M1として特定する。
【0048】
また、鏡像点特定部113は、画像I1における、鏡面131に映った自動車190の鏡像の輪郭線上の、自動車190の前端部の上端部に対応する点M2を、画像処理によって特定する。例えば、鏡像点特定部113は、上記の鏡面131が写っている領域内において、上記の自動車190の鏡像が写っている領域の輪郭線上の、画像I1をY方向に二分する中心線Cvからの最短距離が最も遠い点を、自動車190の前端部に対応する点M2として特定する。
【0049】
また、鏡像点特定部113は、画像I1における、鏡面132に映った自動車190の鏡像の輪郭線上の、自動車190の後端部に対応する点M3を、画像処理によって特定する。例えば、鏡像点特定部113は、鏡面132の位置とデジタルカメラ150の位置との相対的な位置関係が変わらないことから、画像I1における所定の領域を、鏡面132が写っている領域として認識する。そして、鏡像点特定部113は、その鏡面132が写っている領域内において、鏡面132に何ら映っていない場合と比較して、変化のあった領域を、自動車190の鏡像が写っている領域として認識する。そして、鏡像点特定部113は、鏡面132が写っている領域内において、自動車190の鏡像が写っている領域の輪郭線上の、中心線Chからの最短距離が最も遠い点を、自動車190の後端部に対応する点M3として特定する。
【0050】
そして、鏡像点特定部113は、特定した各点M1、M2、M3の画像I1上の座標を示すデータを、車両寸法算出部115へ送る。
【0051】
一方、実像点特定部114は、画像データを、画像判定部112から受け取ると、その画像I1における、自動車190の実像の輪郭線上の特徴的な複数の点を特定する(S104)。
【0052】
具体的には、実像点特定部114は、画像データを、画像判定部112から受け取ると、その画像I1における、自動車190の実像の輪郭線上の、自動車190の一方の側端部に対応する点R1と、自動車190の他方の側端部に対応する点R2とを特定する。例えば、実像点特定部114は、高速道路170の位置とデジタルカメラ150の位置との相対的な関係が変わらないことから、画像I1における所定の領域を、高速道路170が写っている領域として認識する。そして、実像点特定部114は、その高速道路170が写っている領域内において、自動車190が走行していない場合と比較して、変化のあった領域を、自動車190が写っている領域として認識する。そして、実像点特定部114は、高速道路170が写っている領域内において、自動車190が写っている領域の輪郭線上の、中心線Chからの最短距離が最も遠い左右の点を、自動車190の2つの側端部に対応する点R1、R2として特定する。
【0053】
また、実像点特定部114は、画像I1における、自動車190の実像の輪郭線上の、自動車190の前端部に対応する点R3を特定する。例えば、実像点特定部114は、上記の高速道路170が写っている領域内において、上記の自動車190が写っている領域の輪郭線上の、中心線Cvからの最短距離が最も遠い下側の点を、自動車190の前端部に対応する点R3として特定する。
【0054】
そして、実像点特定部114は、特定した各点R1、R2、R3の画像I1上の座標を示すデータを、車両寸法算出部115へ送る。
【0055】
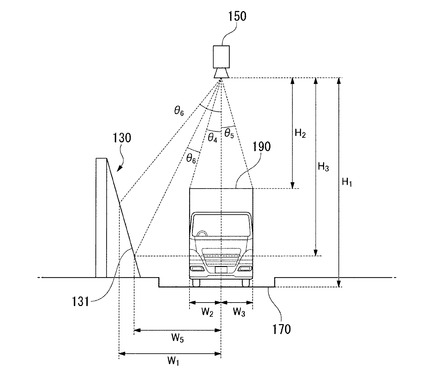
そして、車両寸法算出部115は、画像データと、点M1の画像上の座標を示すデータとを用いて、点M1に対応する鏡面131上の位置とデジタルカメラ150の位置との相対的な位置関係に基づいて、自動車190の車高Hを算出する(S105)。例えば、車両寸法検出システム100を運用するにあたっては、高速道路170の地表からデジタルカメラ150までの高さH1を計測してデータ化しておく。また、車両寸法検出システム100を運用するにあたっては、画像上の2点間の長さと、その2点に対応する空間上の各位置とデジタルカメラ150の位置とをそれぞれ結ぶ各線によって形成される角度との関係を関数化しておく。また、車両寸法検出システム100を運用するにあたっては、鏡面131の位置とデジタルカメラ150の位置との相対的な位置関係が変わらないことから、画像上の鏡面131が写っている領域内の一の点から中心線Chまでの最短の長さと、高速道路170を自動車190の進行方向側から見たときの、その一の点に対応する鏡面131上の位置からデジタルカメラ150の光軸の線までの最短の長さW1との関係を関数化しておく。まず、車両寸法算出部115は、鏡像点特定部113から受け取ったデータによって示される点M1の画像I1上の座標を用いて、画像I1上の点M1から中心線Chまでの最短の長さを算出する。そして、車両寸法算出部115は、算出した点M1から中心線Chまでの最短の長さと、上記の角度の関係を示す関数とを用いて、高速道路170を自動車190の進行方向側から見たときの、点M1に対応する鏡面131上の位置とデジタルカメラ150とを結ぶ線と、デジタルカメラ150の光軸の線とによって形成される角度θ3を算出する。また、車両寸法算出部115は、算出した点M1から中心線Chまでの最短の長さと、上記の長さの関係を示す関数とを用いて、高速道路170を自動車190の進行方向側から見たときの、点M1に対応する鏡面131上の位置からデジタルカメラ150の光軸の線までの最短の長さW1を算出する。そして、車両寸法算出部115は、算出した角度θ3と長さW1とを用いて、自動車190の上端部からデジタルカメラ150までの高さH2を、H2=W1/tanθ3として算出する。そして、車両寸法算出部115は、算出した高さH2と、上記の高速道路170の地表からデジタルカメラ150までの高さH1とを用いて、自動車190の車高Hを、H=H1−H2として算出する。
【0056】
そして、車両寸法算出部115は、画像データと、各点R1、R2の画像上の座標を示すデータとを更に用いて、各点R1、R2にそれぞれ対応する自動車190上の位置とデジタルカメラ150の位置との相対的な位置関係に更に基づいて、自動車190の車幅Wを算出する(S106)。まず、車両寸法算出部115は、実像点特定部から受け取ったデータによって示される点R1、R2の画像I1上の座標を用いて、画像I1上の点R1から中心線Chまでの最短の長さと、画像I1上の点R2から中心線Chまでの最短の長さとを算出する。そして、車両寸法算出部115は、算出した点R1から中心線Chまでの最短の長さと、上記の角度の関係を示す関数とを用いて、高速道路170を自動車190の進行方向側から見たときの、点R1に対応する自動車190上の位置とデジタルカメラ150とを結ぶ線と、デジタルカメラ150の光軸の線とによって形成される角度θ4を算出する。また、車両寸法算出部115は、算出した点R2から中心線Chまでの最短の長さと、上記の角度の関係を示す関数とを用いて、高速道路170を自動車190の進行方向側から見たときの、点R2に対応する自動車190上の位置とデジタルカメラ150とを結ぶ線と、デジタルカメラ150の光軸の線とによって形成される角度θ5を算出する。そして、車両寸法算出部115は、算出した角度θ4と上記の高さH1とを用いて、高速道路170を自動車190の進行方向側から見たときの、点R1に対応する自動車190上の位置から、デジタルカメラ150の光軸の線までの最短の長さW2を、W2=H2×tanθ4として算出する。また、車両寸法算出部115は、算出した角度θ5と上記の高さH1とを用いて、高速道路170を自動車190の進行方向側から見たときの、点R2に対応する自動車190上の位置から、デジタルカメラ150の光軸の線までの最短の長さW3を、W3=H2×tanθ5として算出する。そして、車両寸法算出部115は、算出した長さW2、W3上を用いて、自動車190の車幅Wを、W=W2+W3として算出する。
【0057】
そして、車両寸法算出部115は、画像データと、各点M2、M3、R3の画像上の座標を示すデータとを更に用いて、点M2に対応する鏡面131上の位置とデジタルカメラ150の位置との相対的な位置関係と、点M3に対応する鏡面132上の位置とデジタルカメラ150の位置との相対的な位置関係と、点R3に対応する自動車190上の位置とデジタルカメラ150の位置との相対的な位置関係とに更に基づいて、自動車190の車長Lを算出する(S107)。例えば、車両寸法検出システム100を運用するにあたっては、鏡面132の位置とデジタルカメラ150の位置との相対的な位置関係とが変わらないことから、画像上の鏡面132が写っている領域内の一の点から中心線Cvまでの最短の長さと、高速道路170を側方から見たときの、その一の点に対応する鏡面132上の位置からデジタルカメラ150の光軸の線までの最短の長さとの関係を関数化しておく。また、車両寸法検出システム100を運用するにあたっては、鏡面132の位置とデジタルカメラ150の位置との相対的な位置関係とが変わらないことから、画像上の鏡面132が写っている領域内の一の点から中心線Chまでの最短の長さと、高速道路170を自動車190の進行方向側から見たときの、その一の点に対応する鏡面132上の位置からデジタルカメラ150の光軸の線までの最短の長さとの関係を関数化しておく。まず、車両寸法算出部115は、鏡像点特定部113から受け取ったデータによって示される点M3の画像I1上の座標を用いて、画像I1上の点M3から中心線Cvまでの最短の長さを算出する。そして、車両寸法算出部115は、算出した画像I1上の点M3から中心線Cvまでの最短の長さと、上記の長さの関係を示す関数とを用いて、高速道路170を側方から見たときの、点M3に対応する鏡面132上の位置からデジタルカメラ150の光軸の線までの最短の長さL1を算出する。次に、車両寸法算出部115は、鏡像点特定部113から受け取ったデータによって示される点M2の画像I1上の座標を用いて、点M2から中心線Chまでの画像I1上の長さを算出する。そして、車両寸法算出部115は、算出した点M2から中心線Chまでの画像I1上の長さと、上記の角度の関係を示す関数とを用いて、高速道路170を自動車190の進行方向側から見たときの、点M2に対応する鏡面131上の位置とデジタルカメラ150とを結ぶ線と、デジタルカメラ150の光軸の線とによって形成される角度θ6を算出する。また、車両寸法算出部115は、算出した点M2から中心線Chまでの画像I1上の長さと、上記の長さの関係を示す関数とを用いて、高速道路170を自動車190の進行方向側から見たときの、点M2に対応する鏡面131上の位置からデジタルカメラ150の光軸の線までの最短の長さW5を算出する。そして、車両寸法算出部115は、算出した角度θ6と長さW5とを用いて、自動車190の前端部の上端部からデジタルカメラ150までの高さH3を、H3=W5/tanθ6として算出する。一方、車両寸法算出部115は、実像点特定部114から受け取ったデータによって示される点R3の画像I1上の座標を用いて、点R3から中心線Cvまでの画像I1上の長さを算出する。そして、車両寸法算出部115は、算出した点R3から中心線Cvまでの画像I1上の長さと、上記の角度の関係を示す関数とを用いて、高速道路170を側方から見たときの、点R3に対応する自動車190上の位置とデジタルカメラ150とを結ぶ線と、デジタルカメラ150の光軸の線とによって形成される角度θ7を算出する。そして、車両寸法算出部115は、算出した角度θ7と上記の高さH3とを用いて、高速道路170を側方から見たときの、点R3に対応する自動車190上の位置から、デジタルカメラ150の光軸の線までの最短の長さL2を、L2=H3×tanθ7として算出する。次に、車両寸法算出部115は、鏡像点特定部113から受け取ったデータによって示される点M3の画像I1上の座標を用いて、点M3から中心線Chまでの画像I1上の長さを算出する。そして、車両寸法算出部115は、算出した点M3から中心線Chまでの画像I1上の長さと、上記の長さの関係を示す関数とを用いて、高速道路170を自動車190の進行方向側から見たときの、点M3に対応する鏡面132上の位置からデジタルカメラ150の光軸の線までの最短の長さW6を算出する。そして、車両寸法算出部115は、算出した長さW6と上記の長さL1とを用いて、高速道路170を上方から見たときの、点M3に対応する鏡面132上の位置とデジタルカメラ150とを結ぶ線と、鏡面131と直交する線とによって形成される角度θ8を、θ8=tan(L1/W6)として算出する。そして、車両寸法算出部115は、算出した角度θ8と上記の角度θ2とを用いて、高速道路170を上方から見たときの、点M3に対応する鏡面132上の位置とデジタルカメラ150とを結ぶ線と、鏡面132と直交する線とによって形成される角度θ9を、θ9=θ2+θ8として算出する。一方、車両寸法算出部115は、算出した長さW6と上記の長さW2上を用いて、点M3に対応する鏡面132上の位置から自動車190の一方の側端部までの最短の長さW4を、W4=W6−W2として算出する。そして、車両寸法算出部115は、算出した長さW4と角度θ9とを用いて、高速道路170を上方から見たときの、点M3に対応する鏡面132上の位置から自動車190の後端部までの、高速道路190の延在方向成分の長さL3を、L3=W4×tanθ9として算出する。そして、車両寸法算出部115は、算出した長さL1、L2、L3を用いて、車両190の車長Lを、L=L1+L2+L3として算出する。
【0058】
そして、車両寸法算出部115は、算出した自動車190の車高H、車幅W、及び車長Lを示すデータを、車両寸法データ送信部116へ送る。
【0059】
そして、車両寸法データ送信部116は、自動車190の車高H、車幅W、及び車長Lを示すデータを、車両寸法算出部115から受け取ると、そのデータを、料金所の各種機器へ送信する(S108)。
【0060】
このようにして、料金所の各種機器は、料金所に入ってくる自動車190の車高H、車幅W、及び車長Lを示すデータを取得することができる。そして、料金所の各種機器は、このデータを利用して、自動車190への通行料金を算出することになる。
【0061】
以上説明したように、車両寸法算出システム100においては、鏡130と、デジタルカメラ150と、演算装置110だけのハードウェアで、道路170を走行している自動車190の車高H、車幅W、車長Lを検出することができるので、低コストにてシステムを実現することができる。
【0062】
具体的には、車両寸法検出システム100においては、デジタルカメラ150が撮像した画像に自動車190の後端部が写っていなくても、その自動車190の車高H、車幅W、車長Lを検出することができる。
【0063】
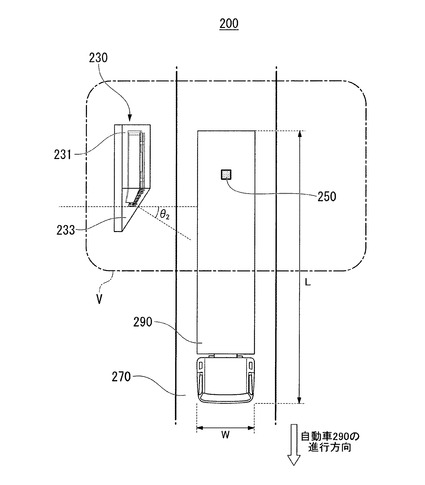
図9及び図10は、別の実施形態に係る車両寸法検出システム200の利用環境の一例を示す。具体的には、図9は、高速道路270を、自動車290の進行方向側から見た状態を示す。また、図10は、高速道路270を、上方から見た状態を示す。車両寸法検出システム200が上記の車両寸法検出システム100と異なる点は、鏡230の鏡面である。車両寸法検出システム200において、上記の車両寸法検出システム100と同じ構成、機能、及び動作については、その詳細な説明を省略する。
【0064】
鏡230は、2つの鏡面231、233を有している。各鏡面231、233は、鉛直方向において、高速道路270の反対側に倒れるような角度θ1を有して配置されている。また、各鏡面231、233は、水平方向において、それぞれ異なる方向を向くように配置されている。具体的には、鏡面231は、高速道路270の延在方向と平行に配置されている。鏡面233は、鏡面231よりも自動車290の進出方向側に、鏡面231と並べて配置されている。そして、鏡面233は、水平方向において、鏡面231から離れるほど、高速道路270から離れるような角度θ2を有して配置されている。なお、鏡面233は、この発明における「第3の鏡面」の一例であってよい。
【0065】
演算装置210は、デジタルカメラ250から順次出力される画像のデジタルデータの入力を受け付けると、その画像において、鏡230の鏡面231に、自動車290の後端部が映っているか否かを判定する。そして、演算装置210は、自動車290の後端部が映っていると判定すると、その画像を用いて、自動車290の車高H、車幅W、及び車長Lを演算により求める。
【0066】
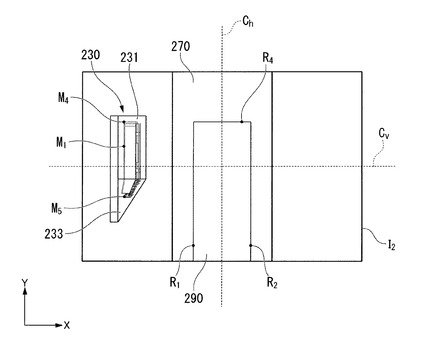
図11は、デジタルカメラ250が撮像した画像I2の一例を示す。演算装置210の処理が上記の演算装置110と異なる点は、自動車290の車長Lを算出する処理である。
【0067】
具体的には、演算装置210は、上記の演算装置110が点M2を特定したのと同じようにして、画像I2における鏡面231に映った自動車290の鏡像の輪郭線上の、自動車190の後端部の上端部に対応する点M4を特定する。また、演算装置210は、上記の演算装置110が点M3を特定したのと同じようにして、鏡面232に映った自動車290の鏡像の輪郭線上の、自動車290の前端部(図示せず)に対応する点M5を特定する。また、演算装置210は、上記の演算装置110が点R3を特定したのと同じようにして、画像I2における、自動車290の実像の輪郭線上の、自動車290の後端部に対応する点R4を更に特定する。そして、演算装置210は、上記の演算装置110が車長Lを特定したのと同じようにして、点M4に対対応する鏡面231上の位置とデジタルカメラ250の位置との相対的な位置関係と、点M5に対応する鏡面233上の位置とデジタルカメラ250の位置との相対的な位置関係と、点R4に対応する自動車290上の位置とデジタルカメラ250の位置との相対的な位置関係とに更に基づいて、自動車290の車長Lを算出する。なお、点M4は、この発明における「第4の鏡像点」の一例であってよい。また、点M5は、この発明における「第5の鏡像点」の一例であってよい。また、点R4は、この発明における「第4の実像点」の一例であってよい。
【0068】
このように、車両寸法検出システム200においては、デジタルカメラ250が撮像した画像に自動車290の前端部が写っていなくても、その自動車290の車高H、車幅W、車長Lを検出することができる。
【0069】
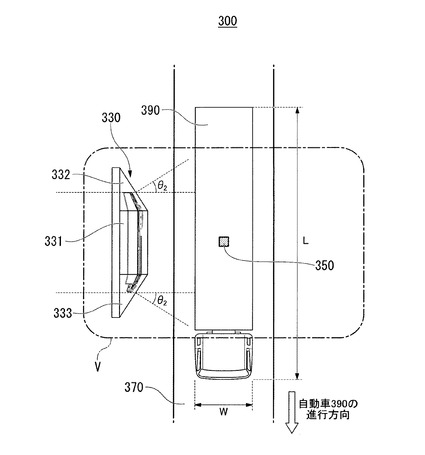
図12及び図13は、更に別の実施形態に係る車両寸法検出システム300の利用環境の一例を示す。具体的には、図12は、高速道路370を、自動車390の進行方向側から見た状態を示す。また、図13は、高速道路370を、上方から見た状態を示す。車両寸法検出システム300が上記の車両寸法検出システム100、200と異なる点は、鏡330の鏡面である。車両寸法検出システム300において、上記の車両寸法検出システム100、200と同じ構成、機能、及び動作については、その詳細な説明を省略する。
【0070】
鏡330は、3つの鏡面331、332、333を有している。各鏡面231、332、233は、鉛直方向において、高速道路370の反対側に倒れるような角度θ1を有して配置されている。また、各鏡面331、332、333は、水平方向において、それぞれ異なる方向を向くように配置されている。具体的には、鏡面331は、高速道路370の延在方向と平行に配置されている。鏡面332は、鏡面331よりも自動車390の進入方向側に、鏡面331と並べて配置されている。鏡面333は、鏡面331よりも自動車390の進出方向側に、鏡面331と並べて配置されている。そして、鏡面332、333は、水平方向において、鏡面331から離れるほど、高速道路370から離れるような角度θ2を有して配置されている。
【0071】
演算装置310は、デジタルカメラ350から順次出力される画像のデジタルデータの入力を受け付けると、その画像において、鏡330の鏡面331に、自動車390が映っている状態で、その自動車390の前端部と後端部が映っているか否かを判定する。そして、演算装置310は、自動車390が映っている状態で、自動車390の前端部と後端部が映っていないと判定すると、その画像を用いて、自動車390の車高H、車幅W、及び車長Lを演算により求める。
【0072】
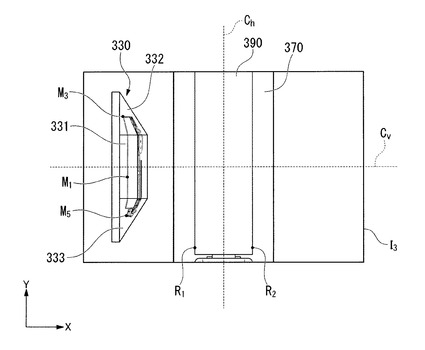
図14は、デジタルカメラ350が撮像した画像I3の一例を示す。演算装置310の処理が上記の演算装置110、210と異なる点は、自動車390の車長Lを算出する処理である。
【0073】
具体的には、演算装置310は、上記の演算装置110、210が車長Lを特定したのと同じようにして、点M3に対対応する鏡面332上の位置とデジタルカメラ350の位置との相対的な位置関係と、点M5に対応する鏡面333上の位置とデジタルカメラ250の位置との相対的な位置関係とに更に基づいて、自動車290の車長Lを算出する。
【0074】
このように、車両寸法検出システム200においては、デジタルカメラ250が撮像した画像に自動車390の前端部と後端部が写っていなくても、その自動車390の車高H、車幅W、車長Lを検出することができる。
【0075】
また、車両寸法検出システムにおいては、デジタルカメラの撮像範囲に赤外線を照射する赤外線照明を更に設けてよい。その場合、デジタルカメラは、高速道路を走行する自動車と、鏡に映った自動車の鏡像とを、赤外線だけを透過させるフィルターを通して撮像する赤外線カメラとする。このような構成とする場合、車両寸法検出システムにおいては、高速道路と鏡との間に、赤外線だけを透過させる壁体を設けてよい。
【0076】
このような構成とすることで、車両寸法検出システムにおいては、夜間や暗い場所においても、演算装置が車両の車高、車幅、及び車長を算出するために用いられる画像を得ることができる。更に、車両寸法検出システムにおいては、高速道路と鏡との間に、赤外線だけを透過させる壁体を設けることによって、陽射しが強い日中においても、鏡の前を通過する自動車のドライバーが、鏡によって反射する光の影響を受ける虞がない。
【0077】
なお、上記の例においては、平面の鏡面を用いた場合について説明したが、これに限るものではない。本発明に係る車両寸法検出システムにおける鏡は、車両の計測に必要な情報が得られるものであればよい。例えば、鏡面は、曲面であってもよい。曲面の鏡面としては、ある曲率を持った円曲面や楕円曲面等が考えられる。その場合、本発明に係る演算装置は、鏡面が持つ曲面の曲率に応じて適宜演算を行い、車両の各情報を取得する。
【0078】
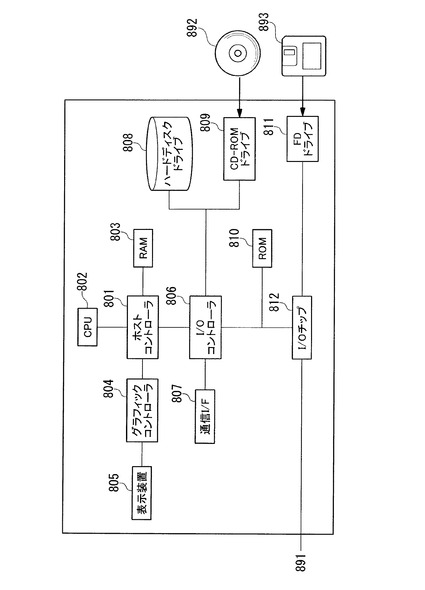
図15は、演算装置110をコンピュータ等の電子情報処理装置でそれぞれ構成した場合のハードウェア構成の一例を示す。演算装置110は、CPU(Central Processing Unit)周辺部と、入出力部と、レガシー入出力部とを備える。CPU周辺部は、ホスト・コントローラ801により相互に接続されるCPU802、RAM(Random Access Memory)803、グラフィック・コントローラ804、及び表示装置805を有する。入出力部は、入出力コントローラ806によりホスト・コントローラ801に接続される通信インターフェイス807、ハードディスクドライブ808、及びCD−ROM(Compact Disk Read Only Memory)ドライブ809を有する。レガシー入出力部は、入出力コントローラ806に接続されるROM(Read Only Memory)810、フレキシブルディスク・ドライブ811、及び入出力チップ812を有する。
【0079】
ホスト・コントローラ801は、RAM803と、高い転送レートでRAM803をアクセスするCPU802、及びグラフィック・コントローラ804とを接続する。CPU802は、ROM810、及びRAM803に格納されたプログラムに基づいて動作して、各部の制御をする。グラフィック・コントローラ804は、CPU802等がRAM803内に設けたフレーム・バッファ上に生成する画像データを取得して、表示装置805上に表示させる。これに代えて、グラフィック・コントローラ804は、CPU802等が生成する画像データを格納するフレーム・バッファを、内部に含んでもよい。
【0080】
入出力コントローラ806は、ホスト・コントローラ801と、比較的高速な入出力装置であるハードディスクドライブ808、通信インターフェイス807、CD−ROMドライブ809を接続する。ハードディスクドライブ808は、CPU802が使用するプログラム、及びデータを格納する。通信インターフェイス807は、ネットワーク通信装置891に接続してプログラム又はデータを送受信する。CD−ROMドライブ809は、CD−ROM892からプログラム又はデータを読み取り、RAM803を介してハードディスクドライブ808、及び通信インターフェイス807に提供する。
【0081】
入出力コントローラ806には、ROM810と、フレキシブルディスク・ドライブ811、及び入出力チップ812の比較的低速な入出力装置とが接続される。ROM810は、演算装置110が起動時に実行するブート・プログラム、あるいは演算装置110のハードウェアに依存するプログラム等を格納する。フレキシブルディスク・ドライブ811は、フレキシブルディスク893からプログラム又はデータを読み取り、RAM803を介してハードディスクドライブ808、及び通信インターフェイス807に提供する。入出力チップ812は、フレキシブルディスク・ドライブ811、あるいはパラレル・ポート、シリアル・ポート、キーボード・ポート、マウス・ポート等を介して各種の入出力装置を接続する。
【0082】
CPU802が実行するプログラムは、フレキシブルディスク893、CD−ROM892、又はIC(Integrated Circuit)カード等の記録媒体に格納されて利用者によって提供される。記録媒体に格納されたプログラムは圧縮されていても非圧縮であってもよい。プログラムは、記録媒体からハードディスクドライブ808にインストールされ、RAM803に読み出されてCPU802により実行される。CPU802により実行されるプログラムは、演算装置110を、図1から図8に関連して説明した画像データ入力受付部111、画像判定部112、鏡像点特定部113、実像点特定部114、車両寸法算出部115、及び車両寸法データ送信部116として機能させる。
【0083】
以上に示したプログラムは、外部の記憶媒体に格納されてもよい。記憶媒体としては、フレキシブルディスク893、CD−ROM892の他に、DVD(Digital Versatile Disk)又はPD(Phase Disk)等の光学記録媒体、MD(MiniDisk)等の光磁気記録媒体、テープ媒体、ICカード等の半導体メモリ等を用いることができる。また、専用通信ネットワークあるいはインターネットに接続されたサーバシステムに設けたハードディスク又はRAM等の記憶媒体を記録媒体として使用して、ネットワークを介したプログラムとして提供してもよい。
【0084】
以上、本発明を実施の形態を用いて説明したが、本発明の技術的範囲は、上記実施の形態に記載の範囲には限定されない。上記実施の形態に、多様な変更又は改良を加えることが可能であることが当業者に明らかである。そのような変更又は改良を加えた形態も本発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。
【符号の説明】
【0085】
100 車両寸法検出システム
110 演算装置
111 画像データ入力受付部
112 画像判定部
113 鏡像点特定部
114 実像点特定部
115 車両寸法算出部
116 車両寸法出力部
130 鏡
131 鏡面
132 鏡面
150 デジタルカメラ
170 高速道路
190 自動車
200 車両寸法検出システム
210 演算装置
230 鏡
231 鏡面
233 鏡面
250 デジタルカメラ
270 高速道路
290 自動車
300 車両寸法検出システム
310 演算装置
330 鏡
331 鏡面
332 鏡面
333 鏡面
350 デジタルカメラ
370 高速道路
390 自動車
801 ホスト・コントローラ
802 CPU
803 RAM
804 グラフィック・コントローラ
805 表示装置
806 入出力コントローラ
807 通信インターフェイス
808 ハードディスクドライブ
809 CD−ROMドライブ
810 ROM
811 フレキシブルディスク・ドライブ
812 入出力チップ
891 ネットワーク通信装置
892 CD−ROM
893 フレキシブルディスク
【技術分野】
【0001】
本発明は、車両寸法検出システムに関する。特に本発明は、車両通過帯を通過する車両の寸法を検出する車両寸法検出システムに関する。
【背景技術】
【0002】
有料道路の料金所では、車両の大きさに応じた通行料金を徴収している。そのために、料金所には、通行車両の寸法を検出するための車両寸法検出システムが設けられている。既知の車両寸法検出システムでは、複数のセンサを用いて、通行車両の車高、車幅、及び車長を、それぞれ検出している。
【0003】
図16は、既知の車両寸法検出システムの構造を模式的に示す。既知の車両寸法検出システムでは、図16(a)に示すように、道路の側方に立設された光センサ装置901、902を用いて車両の車高を検出している。具体的には、光センサ装置901は、道路の一方の側方に立設されている。そして、光センサ装置901には、複数の光送信機が高さ方向に並べて取り付けられている。これに対して、光センサ装置902は、光センサ装置901と向き合うようにして、道路の他方の側方に立設されている。そして、光センサ装置902には、複数の光受信機が高さ方向に並べて取り付けられている。そして、光センサ装置901に取り付けられている各光送信機から送信された光は、光センサ装置902に取り付けられている各光受信機で受信されるようになっている。このような既知の車両寸法検出システムでは、光センサ装置901と光センサ装置902とが設けられている間の道路を車両が通過すると、光センサ装置901に取り付けられた光送信機から送信された光が車両によって遮られて、光センサ装置902に取り付けられた光受信機で受信されないことになる。そこで、この既知の車両寸法検出システムでは、車両に遮られて光を受信することができなかった光受信機の数に基づいて、その車両の車高を検出している。
【0004】
また、既知の車両寸法検出システムでは、図16(b)に示すように、道路の上方に設けられたレーザセンサ装置903を用いて車両の車幅を検出している。具体的には、レーザセンサ装置903は、道路の幅方向に広がるようなレーザ光を、道路の上方から放射している。このような既知の車両寸法検出システムでは、レーザセンサ装置903の下方の道路を車両が通過すると、レーザセンサ装置903から放射されたレーザ光が車両によって遮られることになる。そこで、この既知の車両寸法検出システムでは、車両に遮られたレーザ光の量に基づいて、その車両の車幅を検出している。
【0005】
また、既知の車両寸法検出システムでは、図16(c)に示すように、道路に敷設された荷重センサ装置904を用いて車両の車幅を検出している。この既知の車両検出システムでは、荷重センサ904の上を車両が通過すると、車両のタイヤの位置が検出されることになる。そこで、この既知の車両寸法検出システムでは、検出された車両のタイヤの位置に基づいて、その車両の車幅を検出している。
【0006】
また、既知の車両寸法検出システムでは、図16(d)に示すように、道路の側方に配設された光センサ装置905、906を用いて車両の車長を検出している。具体的には、光センサ装置905は、道路の一方の側方に、道路と平行に配設されている。そして、光センサ905には、複数の光送信機が長さ方向に並べて取り付けられている。これに対して、光センサ装置906は、光センサ装置905と向き合うようにして、道路の他方の側方に配設されている。そして、光センサ装置906には、複数の光受信機が長さ方向に並べて取り付けられている。そして、光センサ装置905に取り付けられている各光送信機から送信された光は、光センサ装置906に取り付けられている各光受信機で受信されるようになっている。このような既知の車両寸法検出システムでは、光センサ装置905と光センサ装置906との間の道路を車両が通過すると、光センサ装置905に取り付けられた光送信機から送信された光が車両によって遮られて、光センサ装置906に取り付けられた光受信機で受信されないことになる。そこで、この既知の車両寸法検出システムでは、車両に遮られた光を受信することができなかった光受信機の数に基づいて、その車両の車長を検出している。
【0007】
また、車両の寸法を検出する別の技術としては、走行レーンの上方から走行する車両の前後方向及び幅方向に距離測定用のレーザ光をそれぞれ走査すると共に、これらレーザ光の反射レーザ光を受光しその走査角度と反射レーザ光の到達時間から距離を計測して車長、車高及び車幅を求める技術が知られている(例えば、特許文献1参照。)。この技術においては、予め入力された車種区分データから車両区分を判断して、車両区分や車両区分から得られる車両情報を出力する。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許第3363763号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
上記の既知の車両寸法検出システムや、特許文献1に記載の技術では、道路を走行している車両の車高、車幅、及び車長を検出することができる。しかしながら、これらのシステムや技術では、車両の車高、車幅、及び車長を検出するのに、大掛かりなセンサ装置やレーザ測距装置等が必要となり、高コストとなってしまう。
【課題を解決するための手段】
【0010】
上記課題を解決するために、本発明の第1の形態によると、車両通過帯を通過する車両の寸法を検出する車両寸法検出システムであって、車両通過帯の側方に設けられて、当該車両通過帯を通過する車両を映す鏡と、車両通過帯の上方に設けられて、当該車両通過帯を通過する車両と、鏡に映った当該車両の鏡像とを撮像する撮像装置と、撮像装置と電気的に接続されて、撮像装置が撮像した画像における、車両の実像の輪郭線上の特徴的な複数の実像点と、鏡に映った当該車両の鏡像の輪郭線上の特徴的な複数の鏡像点とに基づいて、当該車両の寸法を演算により求める演算装置とを備える。
【0011】
鏡は、車両通過帯の延在方向と平行に配置された第1の鏡面と、第1の鏡面よりも車両の進入方向側に第1の鏡面と並べて配置された第2の鏡面と、第1の鏡面よりも車両の進出方向側に第1の鏡面と並べて配置された第3の鏡面とのうち、いずれか一方又は両方の鏡面とを有し、第1の鏡面、第2の鏡面、及び第3の鏡面は、それぞれ、鉛直方向において、車両通過帯の反対側に倒れるような角度を有して配置されており、第2の鏡面、及び第3の鏡面は、それぞれ、水平方向において、第1の鏡面の端部から離れるほど、車両通過帯から離れるような角度を更に有して配置されていてよい。
【0012】
第1の鏡面は、鉛直方向において並んで配列される複数の鏡面に分割され、当該分割された各鏡面は、水平方向から入射した光が撮像装置に向かって反射するように、水平面に対して、それぞれ異なる角度を有していてよい。
【0013】
演算装置は、少なくとも、撮像装置が撮像した画像における、第1の鏡面に映った車両の鏡像の輪郭線上の、少なくとも、車両の上端部に対応する第1の鏡像点を特定する鏡像点特定部と、鏡像点特定部が特定した第1の鏡像点に対応する第1の鏡面上の位置と撮像装置の位置との相対的な位置関係に基づいて、少なくとも、車両の車高を算出する車両寸法算出部とを有してよい。
【0014】
演算装置は、撮像装置が撮像した画像における、車両の実像の輪郭線上の、少なくとも、車両の一方の側端部に対応する第1の実像点と、車両の他方の側端部に対応する第2の実像点とを特定する実像点特定部を更に有し、車両寸法算出部は、実像点特定部が特定した第1の実像点及び第2の実像点にそれぞれに対応する車両上の各位置と撮像装置の位置との相対的な位置関係に更に基づいて、車両の車幅を更に算出してよい。
【0015】
鏡が第1の鏡面及び第2の鏡面だけを有している場合、鏡像点特定部は、撮像装置が撮像した画像における、第1の鏡面に映った車両の鏡像の輪郭線上の、車両の前端部の上端部に対応する第2の鏡像点と、第2の鏡面に映った車両の鏡像の輪郭線上の、車両の後端部に対応する第3の鏡像点とを更に特定し、実像点特定部は、撮像装置が撮像した画像における、車両の実像の輪郭線上の、車両の前端部に対応する第3の実像点を特定し、車両寸法算出部は、鏡像点特定部が特定した第2の鏡像点に対応する第1の鏡面上の位置と撮像装置の位置との相対的な位置関係と、鏡像点特定部が特定した第3の鏡像点に対応する第2の鏡面上の位置と撮像装置の位置との相対的な位置関係と、実像点特定部が特定した第3の実像点に対応する車両上の位置と撮像装置の位置との相対的な位置関係とに更に基づいて、車両の車長を更に算出してよい。
【0016】
鏡が第1の鏡面及び第3の鏡面だけを有している場合、鏡像点特定部は、撮像装置が撮像した画像における、第1の鏡面に映った車両の鏡像の輪郭線上の、車両の後端部の上端部に対応する第4の鏡像点と、第3の鏡面に映った車両の鏡像の輪郭線上の、車両の前端部に対応する第5の鏡像点とを更に特定し、実像点特定部は、撮像装置が撮像した画像における、車両の実像の輪郭線上の、車両の後端部に対応する第4の実像点を特定し、車両寸法算出部は、鏡像点特定部が特定した第4の鏡像点に対応する第1の鏡面上の位置と撮像装置の位置との相対的な位置関係と、鏡像点特定部が特定した第5の鏡像点に対応する第3の鏡面上の位置と撮像装置の位置との相対的な位置関係と、実像点特定部が特定した第4の実像点に対応する車両上の位置と撮像装置の位置との相対的な位置関係とに更に基づいて、車両の車長を更に算出してよい。
【0017】
鏡が第1の鏡面と第2の鏡面と第3の鏡面とを有している場合、鏡像点特定部は、撮像装置が撮像した画像における、第2の鏡面に映った車両の鏡像の輪郭線上の、車両の後端部に対応する第3の鏡像点と、第3の鏡面に映った車両の鏡像の輪郭線上の、車両の前端部に対応する第5の鏡像点とを更に特定し、車両寸法算出部は、鏡像点特定部が特定した第3の鏡像点に対応する第2の鏡面上の位置と撮像装置の位置との相対的な位置関係と、鏡像点特定部が特定した第5の鏡像点に対応する第3の鏡面上の位置と撮像装置の位置との相対的な位置関係とに更に基づいて、車両の車長を更に算出してよい。
【0018】
撮像装置の撮像範囲に赤外線を照射する赤外線照明を更に備え、撮像装置は、車両通過帯を通過する車両と、鏡に映った当該車両の鏡像とを、赤外線だけを透過させるフィルターを通して撮像してよい。
【0019】
車両通過帯と鏡との間に設けられて、赤外線だけを透過させる壁体を更に備えてよい。
【0020】
なおまた、上記のように発明の概要は、本発明の必要な特徴の全てを列挙したものではなく、これらの特徴群のサブコンビネーションもまた、発明となり得る。
【発明の効果】
【0021】
以上の説明から明らかなように、この発明においては、鏡と撮像装置と、車両の寸法を演算するための演算装置だけのハードウェアで、車両通過帯を通過している車両の寸法を検出することができるので、低コストにてシステムを実現することができる。
【図面の簡単な説明】
【0022】
【図1】一実施形態に係る車両寸法検出システム100の利用環境の一例を示す図である。
【図2】一実施形態に係る車両寸法検出システム100の利用環境の一例を示す図である。
【図3】図1のデジタルカメラ150が撮像した画像の一例を示す図である。
【図4】演算装置110のブロック構成の一例を示す図である。
【図5】鏡130、自動車190、及びデジタルカメラ150の相対的な位置関係を示す図である。
【図6】鏡130、自動車190、及びデジタルカメラ150の相対的な位置関係を示す図である。
【図7】自動車190及びデジタルカメラ150の相対的な位置関係を示す図である。
【図8】演算装置110の動作フローの一例を示す図である。
【図9】別の実施形態に係る車両寸法検出システム200の利用環境の一例を示す図である。
【図10】別の実施形態に係る車両寸法検出システム200の利用環境の一例を示す図である。
【図11】デジタルカメラ250が撮像した画像I2の一例を示す図である。
【図12】更に別の実施形態に係る車両寸法検出システム200の利用環境の一例を示す図である。
【図13】更に別の実施形態に係る車両寸法検出システム200の利用環境の一例を示す図である。
【図14】デジタルカメラ350が撮像した画像I3の一例を示す図である。
【図15】演算装置110のハードウェア構成の一例を示す図である。
【図16】既知の車両寸法検出システムの構造を模式的に示す図である。
【発明を実施するための形態】
【0023】
以下、発明の実施の形態を通じて本発明を説明するが、以下の実施形態は、特許請求の範囲にかかる発明を限定するものではなく、また、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
【0024】
図1及び図2は、一実施形態に係る車両寸法検出システム100の利用環境の一例を示す。具体的には、図1は、高速道路170を、自動車190の進行方向側から見た状態を示す。また、図2は、高速道路170を、上方から見た状態を示す。車両寸法検出システム100は、高速道路170を走行する自動車190の車高H、車幅W、及び車長Lを検出するシステムである。具体的には、車両寸法検出システム100は、高速道路170の料金所の手前の位置において、高速道路170を走行する自動車190の車高H、車幅W、及び車長Lを検出する。そして、車両寸法検出システム100によって検出された自動車190の車高H、車幅W、及び車長Lは、自動車190の種別を特定するために利用される。そして、特定された自動車190の種別の情報は、高速道路300の料金所において、自動車190の種別毎に異なる料金を適用して収受するために利用される。なお、高速道路170は、この発明における「車両通過帯」の一例であってよい。また、自動車190は、この発明における「車両」の一例であってよい。また、車高H、車幅W、及び車長Lは、この発明における「寸法」の一例であってよい。
【0025】
車両寸法検出システム100は、演算装置110、鏡130、及びデジタルカメラ150を備える。演算装置110は、デジタルカメラ150と電気的に接続されている。また、演算装置110は、図示しない料金所の各種機器と電気的に接続されている。なお、デジタルカメラ150は、この発明における「撮像装置」の一例であってよい。
【0026】
鏡130は、光の反射を利用して形や姿を映して見る道具である。鏡130は、高速道路170の側方に設けられている。鏡130は、2つの鏡面131、132を有している。各鏡面131、132は、鉛直方向において、高速道路170の反対側に倒れるような角度θ1を有して配置されている。また、各鏡面131、132は、水平方向において、それぞれ異なる方向を向くように配置されている。具体的には、鏡面131は、高速道路170の延在方向と平行に配置されている。鏡面132は、鏡面131よりも自動車190の進入方向側に、鏡面131と並べて配置されている。そして、鏡面132は、水平方向において、鏡面131から離れるほど、高速道路170から離れるような角度θ2を有して配置されている。ここで、θ2は、高速道路170の延在方向と直行する鉛直線と、鏡面132の法線方向の鉛直線とが成す角度である。なお、鏡面131は、この発明における「第1の鏡面」の一例であってよい。また、鏡面132は、この発明における「第2の鏡面」の一例であってよい。
【0027】
また、鏡面131は、鉛直方向において並んで配列される複数の鏡面131a、b、c、・・・に分割されている。そして、各鏡面131a、b、c、・・・は、水平方向から入射した光がデジタルカメラ150のレンズに向かって反射するように、それぞれ異なる角度を有している。
【0028】
デジタルカメラ150は、CCD(Charge Coupled Devices)やCMOS(Complementary Metal Oxide Semiconductor)等の光に反応する半導体素子を使って映像を電気信号に変換し、デジタルデータとしてフラッシュメモリ等の記憶媒体に記憶する装置である。デジタルカメラ150は、鏡130の全体と、高速道路170の幅方向の全体とが撮像範囲Vに入るようにして設けられる。また、デジタルカメラ150は、演算装置110と電気的に接続されている。そして、デジタルカメラ150は、微小時間置きに撮像処理を行い、撮像した画像のデジタルデータを、演算装置110へ順次出力する。
【0029】
演算装置110は、デジタルカメラ150から順次出力される画像のデジタルデータの入力を受け付けると、その画像において、鏡130の鏡面131に、自動車190の前端部が映っているか否かを判定する。そして、演算装置110は、自動車190の前端部が映っていると判定すると、その画像を用いて、自動車190の車高H、車幅W、及び車長Lを演算により求める。具体的には、演算装置110は、その画像における、自動車190の実像の輪郭線において特徴的な複数の点と、鏡130に映った自動車190の鏡像の輪郭線において特徴的な複数の点とに基づいて、自動車190の車高H、車幅W、及び車長Lを演算により求める。
【0030】
このように、車両寸法検出システム100においては、鏡130と、デジタルカメラ150と、演算装置110だけのハードウェアで、道路170を走行している自動車190の車高H、車幅W、車長Lを検出することができるので、低コストにてシステムを実現することができる。
【0031】
図3は、デジタルカメラ150が撮像した画像I1の一例を示す。演算装置110は、画像I1における、鏡面131に映った自動車190の鏡像の輪郭線上の、自動車190の上端部に対応する点M1を特定する。そして、演算装置110は、点M1に対応する鏡面131上の位置と、デジタルカメラ150の位置との相対的な関係に基づいて、自動車190の車高Hを算出する。なお、点M1は、この発明における「第1の鏡像点」の一例であってよい。
【0032】
また、演算装置110は、画像I1における、自動車190の実像の輪郭線上の、自動車190の一方の側端部に対応する点R1と、自動車190の他方の側端部に対応する点R2とを特定する。そして、演算装置110は、点R1及び点R2にそれぞれ対応する自動車190上の各位置とデジタルカメラ150の位置との相対的な位置関係とに更に基づいて、自動車190の車幅Wを算出する。なお、点R1は、この発明における「第1の実像点」の一例であってよい。また、点R2は、この発明における「第2の実像点」の一例であってよい。
【0033】
また、演算装置110は、画像I1における鏡面131に映った自動車190の鏡像の輪郭線上の、自動車190の前端部の上端部に対応する点M2と、鏡面132に映った自動車190の鏡像の輪郭線上の、自動車190の後端部(図示せず)に対応する点M3とを更に特定する。また、演算装置110は、画像I1における、自動車190の実像の輪郭線上の、自動車190の前端部に対応する点R3を更に特定する。そして、演算装置110は、点M2に対対応する鏡面131上の位置とデジタルカメラ150の位置との相対的な位置関係と、点M3に対応する鏡面132上の位置とデジタルカメラ150の位置との相対的な位置関係と、点R3に対応する自動車190上の位置とデジタルカメラ150の位置との相対的な位置関係とに更に基づいて、自動車190の車長Lを更に算出する。なお、点M2は、この発明における「第2の鏡像点」の一例であってよい。また、点M3は、この発明における「第3の鏡像点」の一例であってよい。また、点R3は、この発明における「第3の実像点」の一例であってよい。
【0034】
このように、車両寸法検出システム100においては、デジタルカメラ150が撮像した画像に自動車190の後端部が写っていなくても、その自動車190の車高H、車幅W、車長Lを検出することができる。
【0035】
なお、本実施形態においては、説明が煩雑になることを防ぐことを目的として、車両寸法検出システム100が一の演算装置110を備える構成について説明したが、車両寸法検出システム100は、複数の演算装置110を備えてよい。
【0036】
図4は、演算装置110のブロック構成の一例を示す。演算装置110は、画像データ入力受付部111、画像判定部112、鏡像点特定部113、実像点特定部114、車両寸法算出部115、及び車両寸法データ送信部116を有する。以下、各構成要素の機能及び動作を説明する。
【0037】
画像データ入力受付部111は、デジタルカメラ150から順次出力された画像データの入力を順次受け付ける。具体的には、画像データ入力受付部111は、デジタルカメラ150から順次出力された画像データの入力を順次受け付けると、その画像データを、画像判定部112へ順次送る。
【0038】
画像判定部112は、デジタルカメラ150が撮像した画像において、鏡130の鏡面131に、自動車190の前端部が映っているか否かを判定する。具体的には、画像判定部112は、画像データを、画像データ入力受付部111から受け取る度に、その画像において、鏡130の鏡面131に、自動車190の前端部が映っているか否かを、画像処理によって判定する。そして、画像判定部112は、画像データ入力受付部111から受け取った画像において、鏡130の鏡面131に、自動車190の前端部が映っていると判定すると、その画像データを、鏡像点特定部113、実像点特定部114、及び車両寸法算出部115へ送る。そして、画像判定部112は、一の画像データを、鏡像点特定部113、実像点特定部114、及び車両寸法算出部115へ送ると、画像データ入力受付部111から受け取った画像において、鏡130の鏡面131に、自動車190の前端部が映っていないと判定されるまで、その画像データを破棄する。また、画像判定部112は、画像データ入力受付部111から受け取った画像において、鏡130の鏡面131に、自動車190の前端部が映っていないと判定すると、その画像データを破棄する。
【0039】
鏡像点特定部113は、デジタルカメラ150が撮像した画像における、鏡130に映った自動車190の鏡像の輪郭線上の特徴的な複数の点を特定する。具体的には、鏡像点特定部113は、画像データを、画像判定部112から受け取ると、その画像I1における、鏡面131に映った自動車190の鏡像の輪郭線上の、自動車190の上端部に対応する点M1を、画像処理によって特定する。また、鏡像点特定部113は、画像I1における、鏡面131に映った自動車190の鏡像の輪郭線上の、自動車190の前端部の上端部に対応する点M2を、画像処理によって特定する。また、鏡像点特定部113は、画像I1における、鏡面132に映った自動車190の鏡像の輪郭線上の、自動車190の後端部に対応する点M3を、画像処理によって特定する。そして、鏡像点特定部113は、特定した各点M1、M2、M3の画像上の座標を示すデータを、車両寸法算出部115へ送る。
【0040】
実像点特定部114は、デジタルカメラ150が撮像した画像における、自動車190の実像の輪郭線上の特徴的な複数の点を特定する。具体的には、実像点特定部114は、画像データを、画像判定部112から受け取ると、その画像I1における、自動車190の実像の輪郭線上の、自動車190の一方の側端部に対応する点R1と、自動車190の他方の側端部に対応する点R2とを特定する。また、実像点特定部114は、画像I1における、自動車190の実像の輪郭線上の、自動車190の前端部に対応する点R3を特定する。そして、実像点特定部114は、特定した各点R1、R2、R3の画像上の座標を示すデータを、車両寸法算出部115へ送る。
【0041】
車両寸法算出部115は、自動車190の車高H、車幅W、及び車長Lを演算により求める。具体的には、車両寸法算出部115は、画像データを、画像判定部112から受け取る。また、車両寸法算出部115は、画像I1における、自動車190の鏡像の輪郭線上の各点M1、M2、M3の画像上の座標を示すデータを、鏡像点特定部113から受け取る。また、車両寸法算出部115は、画像I1における、自動車190の実像の輪郭線上の各点R1、R2、R3の画像上の座標を示すデータを、実像点特定部114から受け取る。そして、車両寸法算出部115は、画像データと、点M1の画像上の座標を示すデータとを用いて、点M1に対応する鏡面131上の位置とデジタルカメラ150の位置との相対的な位置関係に基づいて、自動車190の車高Hを算出する。また、車両寸法算出部115は、画像データと、各点R1、R2の画像上の座標を示すデータとを更に用いて、各点R1、R2にそれぞれ対応する自動車190上の位置とデジタルカメラ150の位置との相対的な位置関係に更に基づいて、自動車190の車幅Wを算出する。また、車両寸法算出部115は、画像データと、各点M2、M3、R3の画像上の座標を示すデータとを更に用いて、点M2に対応する鏡面131上の位置とデジタルカメラ150の位置との相対的な位置関係と、点M3に対応する鏡面132上の位置とデジタルカメラ150の位置との相対的な位置関係と、点R3に対応する自動車190上の位置とデジタルカメラ150の位置との相対的な位置関係とに更に基づいて、自動車190の車長Lを算出する。そして、車両寸法算出部115は、算出した自動車190の車高H、車幅W、及び車長Lを示すデータを、車両寸法データ送信部116へ送る。
【0042】
車両寸法データ送信部116は、自動車190の車高H、車幅W、及び車長Lを示すデータを、料金所の各種機器へ送信する。具体的には、車両寸法データ送信部116は、自動車190の車高H、車幅W、及び車長Lを示すデータを、車両寸法算出部115から受け取ると、そのデータを、料金所の各種機器へ送信する。
【0043】
図8は、演算装置110の動作フローの一例を示す。この動作フローの説明においては、図1から図7を共に参照する。なお、図5から図7は、鏡130、自動車190、及びデジタルカメラ150の相対的な位置関係を示す。具体的には、図5は、高速道路170を、自動車190の進行方向側から見た状態を示す。また、図6は、高速道路170を、上方から見た状態を示す。また、図7は、高速道路170を、鏡130が設けられていない側方から見た状態を示す。
【0044】
車両寸法検出システム100においては、デジタルカメラ150は、微小時間毎に撮像を繰り返し、撮像した画像のデジタルデータを、演算装置110へ順次出力する。演算装置110の画像データ入力受付部111は、デジタルカメラ150から順次出力された画像データの入力を順次受け付けると(S101)、その画像データを、画像判定部112へ順次送る。
【0045】
そして、演算装置110の画像判定部112は、画像データを、画像データ入力受付部111から受け取る度に、その画像において、鏡130の鏡面131に、自動車190の前端部が映っているか否かを、画像処理によって判定する(S102)。そして、画像判定部112は、画像データ入力受付部111から受け取った画像において、鏡130の鏡面131に、自動車190の前端部が映っていると判定すると、その画像データを、鏡像点特定部113、実像点特定部114、及び車両寸法算出部115へ送る。そして、画像判定部112は、一の画像データを、鏡像点特定部113、実像点特定部114、及び車両寸法算出部115へ送ると、画像データ入力受付部111から受け取った画像において、鏡130の鏡面131に、自動車190の前端部が映っていないと判定されるまで、その画像データを破棄する。また、画像判定部112は、画像データ入力受付部111から受け取った画像において、鏡130の鏡面131に、自動車190の前端部が映っていないと判定すると、その画像データを破棄する。画像判定部112のこのような処理によって、車両寸法検出システム100においては、鏡130の鏡面131に、自動車190の前端部が映っている画像を用いて、自動車190の車高H、車幅W、及び車長Lが算出される。また、画像判定部112のこのような処理によって、車両寸法検出システム100においては、自動車190の車高H、車幅W、及び車長Lの算出のために画像が用いられると、その後に撮像された画像に同じ自動車190が映っていても、その画像データは破棄される。そして、画像判定部112のこのような処理によって、車両寸法検出システム100においては、鏡130の鏡面131に、その後に通過する自動車190の前端部が映っている画像があると、その画像を用いて、自動車190の車高H、車幅W、及び車長Lが算出されることになる。この動作フローにおいては、画像判定部112が、図3に示すような画像データを、画像データ入力受付部111から受け取り、鏡130の鏡面131に、自動車190の前端部が映っていると判定したと仮定する。
【0046】
そして、演算装置110の鏡像点特定部113は、画像データを、画像判定部112から受け取ると、その画像I1における、鏡130に映った自動車190の鏡像の輪郭線上の特徴的な複数の点を特定する(S103)。
【0047】
具体的には、鏡像点特定部113は、画像I1における、鏡面131に映った自動車190の鏡像の輪郭線上の、自動車190の上端部に対応する点M1を、画像処理によって特定する。例えば、鏡像点特定部113は、鏡面131の位置とデジタルカメラ150の位置との相対的な位置関係が変わらないことから、画像I1における所定の領域を、鏡面131が写っている領域として認識する。そして、鏡像点特定部113は、その鏡面131が写っている領域内において、鏡面131に何ら映っていない場合と比較して、変化のあった領域を、自動車190の鏡像が写っている領域として認識する。そして、鏡像点特定部113は、鏡面131が写っている領域内において、自動車190の鏡像が写っている領域の輪郭線上の、画像I1をX方向に二分する中心線Chからの最短距離が最も遠い点を、自動車190の上端部に対応する点M1として特定する。
【0048】
また、鏡像点特定部113は、画像I1における、鏡面131に映った自動車190の鏡像の輪郭線上の、自動車190の前端部の上端部に対応する点M2を、画像処理によって特定する。例えば、鏡像点特定部113は、上記の鏡面131が写っている領域内において、上記の自動車190の鏡像が写っている領域の輪郭線上の、画像I1をY方向に二分する中心線Cvからの最短距離が最も遠い点を、自動車190の前端部に対応する点M2として特定する。
【0049】
また、鏡像点特定部113は、画像I1における、鏡面132に映った自動車190の鏡像の輪郭線上の、自動車190の後端部に対応する点M3を、画像処理によって特定する。例えば、鏡像点特定部113は、鏡面132の位置とデジタルカメラ150の位置との相対的な位置関係が変わらないことから、画像I1における所定の領域を、鏡面132が写っている領域として認識する。そして、鏡像点特定部113は、その鏡面132が写っている領域内において、鏡面132に何ら映っていない場合と比較して、変化のあった領域を、自動車190の鏡像が写っている領域として認識する。そして、鏡像点特定部113は、鏡面132が写っている領域内において、自動車190の鏡像が写っている領域の輪郭線上の、中心線Chからの最短距離が最も遠い点を、自動車190の後端部に対応する点M3として特定する。
【0050】
そして、鏡像点特定部113は、特定した各点M1、M2、M3の画像I1上の座標を示すデータを、車両寸法算出部115へ送る。
【0051】
一方、実像点特定部114は、画像データを、画像判定部112から受け取ると、その画像I1における、自動車190の実像の輪郭線上の特徴的な複数の点を特定する(S104)。
【0052】
具体的には、実像点特定部114は、画像データを、画像判定部112から受け取ると、その画像I1における、自動車190の実像の輪郭線上の、自動車190の一方の側端部に対応する点R1と、自動車190の他方の側端部に対応する点R2とを特定する。例えば、実像点特定部114は、高速道路170の位置とデジタルカメラ150の位置との相対的な関係が変わらないことから、画像I1における所定の領域を、高速道路170が写っている領域として認識する。そして、実像点特定部114は、その高速道路170が写っている領域内において、自動車190が走行していない場合と比較して、変化のあった領域を、自動車190が写っている領域として認識する。そして、実像点特定部114は、高速道路170が写っている領域内において、自動車190が写っている領域の輪郭線上の、中心線Chからの最短距離が最も遠い左右の点を、自動車190の2つの側端部に対応する点R1、R2として特定する。
【0053】
また、実像点特定部114は、画像I1における、自動車190の実像の輪郭線上の、自動車190の前端部に対応する点R3を特定する。例えば、実像点特定部114は、上記の高速道路170が写っている領域内において、上記の自動車190が写っている領域の輪郭線上の、中心線Cvからの最短距離が最も遠い下側の点を、自動車190の前端部に対応する点R3として特定する。
【0054】
そして、実像点特定部114は、特定した各点R1、R2、R3の画像I1上の座標を示すデータを、車両寸法算出部115へ送る。
【0055】
そして、車両寸法算出部115は、画像データと、点M1の画像上の座標を示すデータとを用いて、点M1に対応する鏡面131上の位置とデジタルカメラ150の位置との相対的な位置関係に基づいて、自動車190の車高Hを算出する(S105)。例えば、車両寸法検出システム100を運用するにあたっては、高速道路170の地表からデジタルカメラ150までの高さH1を計測してデータ化しておく。また、車両寸法検出システム100を運用するにあたっては、画像上の2点間の長さと、その2点に対応する空間上の各位置とデジタルカメラ150の位置とをそれぞれ結ぶ各線によって形成される角度との関係を関数化しておく。また、車両寸法検出システム100を運用するにあたっては、鏡面131の位置とデジタルカメラ150の位置との相対的な位置関係が変わらないことから、画像上の鏡面131が写っている領域内の一の点から中心線Chまでの最短の長さと、高速道路170を自動車190の進行方向側から見たときの、その一の点に対応する鏡面131上の位置からデジタルカメラ150の光軸の線までの最短の長さW1との関係を関数化しておく。まず、車両寸法算出部115は、鏡像点特定部113から受け取ったデータによって示される点M1の画像I1上の座標を用いて、画像I1上の点M1から中心線Chまでの最短の長さを算出する。そして、車両寸法算出部115は、算出した点M1から中心線Chまでの最短の長さと、上記の角度の関係を示す関数とを用いて、高速道路170を自動車190の進行方向側から見たときの、点M1に対応する鏡面131上の位置とデジタルカメラ150とを結ぶ線と、デジタルカメラ150の光軸の線とによって形成される角度θ3を算出する。また、車両寸法算出部115は、算出した点M1から中心線Chまでの最短の長さと、上記の長さの関係を示す関数とを用いて、高速道路170を自動車190の進行方向側から見たときの、点M1に対応する鏡面131上の位置からデジタルカメラ150の光軸の線までの最短の長さW1を算出する。そして、車両寸法算出部115は、算出した角度θ3と長さW1とを用いて、自動車190の上端部からデジタルカメラ150までの高さH2を、H2=W1/tanθ3として算出する。そして、車両寸法算出部115は、算出した高さH2と、上記の高速道路170の地表からデジタルカメラ150までの高さH1とを用いて、自動車190の車高Hを、H=H1−H2として算出する。
【0056】
そして、車両寸法算出部115は、画像データと、各点R1、R2の画像上の座標を示すデータとを更に用いて、各点R1、R2にそれぞれ対応する自動車190上の位置とデジタルカメラ150の位置との相対的な位置関係に更に基づいて、自動車190の車幅Wを算出する(S106)。まず、車両寸法算出部115は、実像点特定部から受け取ったデータによって示される点R1、R2の画像I1上の座標を用いて、画像I1上の点R1から中心線Chまでの最短の長さと、画像I1上の点R2から中心線Chまでの最短の長さとを算出する。そして、車両寸法算出部115は、算出した点R1から中心線Chまでの最短の長さと、上記の角度の関係を示す関数とを用いて、高速道路170を自動車190の進行方向側から見たときの、点R1に対応する自動車190上の位置とデジタルカメラ150とを結ぶ線と、デジタルカメラ150の光軸の線とによって形成される角度θ4を算出する。また、車両寸法算出部115は、算出した点R2から中心線Chまでの最短の長さと、上記の角度の関係を示す関数とを用いて、高速道路170を自動車190の進行方向側から見たときの、点R2に対応する自動車190上の位置とデジタルカメラ150とを結ぶ線と、デジタルカメラ150の光軸の線とによって形成される角度θ5を算出する。そして、車両寸法算出部115は、算出した角度θ4と上記の高さH1とを用いて、高速道路170を自動車190の進行方向側から見たときの、点R1に対応する自動車190上の位置から、デジタルカメラ150の光軸の線までの最短の長さW2を、W2=H2×tanθ4として算出する。また、車両寸法算出部115は、算出した角度θ5と上記の高さH1とを用いて、高速道路170を自動車190の進行方向側から見たときの、点R2に対応する自動車190上の位置から、デジタルカメラ150の光軸の線までの最短の長さW3を、W3=H2×tanθ5として算出する。そして、車両寸法算出部115は、算出した長さW2、W3上を用いて、自動車190の車幅Wを、W=W2+W3として算出する。
【0057】
そして、車両寸法算出部115は、画像データと、各点M2、M3、R3の画像上の座標を示すデータとを更に用いて、点M2に対応する鏡面131上の位置とデジタルカメラ150の位置との相対的な位置関係と、点M3に対応する鏡面132上の位置とデジタルカメラ150の位置との相対的な位置関係と、点R3に対応する自動車190上の位置とデジタルカメラ150の位置との相対的な位置関係とに更に基づいて、自動車190の車長Lを算出する(S107)。例えば、車両寸法検出システム100を運用するにあたっては、鏡面132の位置とデジタルカメラ150の位置との相対的な位置関係とが変わらないことから、画像上の鏡面132が写っている領域内の一の点から中心線Cvまでの最短の長さと、高速道路170を側方から見たときの、その一の点に対応する鏡面132上の位置からデジタルカメラ150の光軸の線までの最短の長さとの関係を関数化しておく。また、車両寸法検出システム100を運用するにあたっては、鏡面132の位置とデジタルカメラ150の位置との相対的な位置関係とが変わらないことから、画像上の鏡面132が写っている領域内の一の点から中心線Chまでの最短の長さと、高速道路170を自動車190の進行方向側から見たときの、その一の点に対応する鏡面132上の位置からデジタルカメラ150の光軸の線までの最短の長さとの関係を関数化しておく。まず、車両寸法算出部115は、鏡像点特定部113から受け取ったデータによって示される点M3の画像I1上の座標を用いて、画像I1上の点M3から中心線Cvまでの最短の長さを算出する。そして、車両寸法算出部115は、算出した画像I1上の点M3から中心線Cvまでの最短の長さと、上記の長さの関係を示す関数とを用いて、高速道路170を側方から見たときの、点M3に対応する鏡面132上の位置からデジタルカメラ150の光軸の線までの最短の長さL1を算出する。次に、車両寸法算出部115は、鏡像点特定部113から受け取ったデータによって示される点M2の画像I1上の座標を用いて、点M2から中心線Chまでの画像I1上の長さを算出する。そして、車両寸法算出部115は、算出した点M2から中心線Chまでの画像I1上の長さと、上記の角度の関係を示す関数とを用いて、高速道路170を自動車190の進行方向側から見たときの、点M2に対応する鏡面131上の位置とデジタルカメラ150とを結ぶ線と、デジタルカメラ150の光軸の線とによって形成される角度θ6を算出する。また、車両寸法算出部115は、算出した点M2から中心線Chまでの画像I1上の長さと、上記の長さの関係を示す関数とを用いて、高速道路170を自動車190の進行方向側から見たときの、点M2に対応する鏡面131上の位置からデジタルカメラ150の光軸の線までの最短の長さW5を算出する。そして、車両寸法算出部115は、算出した角度θ6と長さW5とを用いて、自動車190の前端部の上端部からデジタルカメラ150までの高さH3を、H3=W5/tanθ6として算出する。一方、車両寸法算出部115は、実像点特定部114から受け取ったデータによって示される点R3の画像I1上の座標を用いて、点R3から中心線Cvまでの画像I1上の長さを算出する。そして、車両寸法算出部115は、算出した点R3から中心線Cvまでの画像I1上の長さと、上記の角度の関係を示す関数とを用いて、高速道路170を側方から見たときの、点R3に対応する自動車190上の位置とデジタルカメラ150とを結ぶ線と、デジタルカメラ150の光軸の線とによって形成される角度θ7を算出する。そして、車両寸法算出部115は、算出した角度θ7と上記の高さH3とを用いて、高速道路170を側方から見たときの、点R3に対応する自動車190上の位置から、デジタルカメラ150の光軸の線までの最短の長さL2を、L2=H3×tanθ7として算出する。次に、車両寸法算出部115は、鏡像点特定部113から受け取ったデータによって示される点M3の画像I1上の座標を用いて、点M3から中心線Chまでの画像I1上の長さを算出する。そして、車両寸法算出部115は、算出した点M3から中心線Chまでの画像I1上の長さと、上記の長さの関係を示す関数とを用いて、高速道路170を自動車190の進行方向側から見たときの、点M3に対応する鏡面132上の位置からデジタルカメラ150の光軸の線までの最短の長さW6を算出する。そして、車両寸法算出部115は、算出した長さW6と上記の長さL1とを用いて、高速道路170を上方から見たときの、点M3に対応する鏡面132上の位置とデジタルカメラ150とを結ぶ線と、鏡面131と直交する線とによって形成される角度θ8を、θ8=tan(L1/W6)として算出する。そして、車両寸法算出部115は、算出した角度θ8と上記の角度θ2とを用いて、高速道路170を上方から見たときの、点M3に対応する鏡面132上の位置とデジタルカメラ150とを結ぶ線と、鏡面132と直交する線とによって形成される角度θ9を、θ9=θ2+θ8として算出する。一方、車両寸法算出部115は、算出した長さW6と上記の長さW2上を用いて、点M3に対応する鏡面132上の位置から自動車190の一方の側端部までの最短の長さW4を、W4=W6−W2として算出する。そして、車両寸法算出部115は、算出した長さW4と角度θ9とを用いて、高速道路170を上方から見たときの、点M3に対応する鏡面132上の位置から自動車190の後端部までの、高速道路190の延在方向成分の長さL3を、L3=W4×tanθ9として算出する。そして、車両寸法算出部115は、算出した長さL1、L2、L3を用いて、車両190の車長Lを、L=L1+L2+L3として算出する。
【0058】
そして、車両寸法算出部115は、算出した自動車190の車高H、車幅W、及び車長Lを示すデータを、車両寸法データ送信部116へ送る。
【0059】
そして、車両寸法データ送信部116は、自動車190の車高H、車幅W、及び車長Lを示すデータを、車両寸法算出部115から受け取ると、そのデータを、料金所の各種機器へ送信する(S108)。
【0060】
このようにして、料金所の各種機器は、料金所に入ってくる自動車190の車高H、車幅W、及び車長Lを示すデータを取得することができる。そして、料金所の各種機器は、このデータを利用して、自動車190への通行料金を算出することになる。
【0061】
以上説明したように、車両寸法算出システム100においては、鏡130と、デジタルカメラ150と、演算装置110だけのハードウェアで、道路170を走行している自動車190の車高H、車幅W、車長Lを検出することができるので、低コストにてシステムを実現することができる。
【0062】
具体的には、車両寸法検出システム100においては、デジタルカメラ150が撮像した画像に自動車190の後端部が写っていなくても、その自動車190の車高H、車幅W、車長Lを検出することができる。
【0063】
図9及び図10は、別の実施形態に係る車両寸法検出システム200の利用環境の一例を示す。具体的には、図9は、高速道路270を、自動車290の進行方向側から見た状態を示す。また、図10は、高速道路270を、上方から見た状態を示す。車両寸法検出システム200が上記の車両寸法検出システム100と異なる点は、鏡230の鏡面である。車両寸法検出システム200において、上記の車両寸法検出システム100と同じ構成、機能、及び動作については、その詳細な説明を省略する。
【0064】
鏡230は、2つの鏡面231、233を有している。各鏡面231、233は、鉛直方向において、高速道路270の反対側に倒れるような角度θ1を有して配置されている。また、各鏡面231、233は、水平方向において、それぞれ異なる方向を向くように配置されている。具体的には、鏡面231は、高速道路270の延在方向と平行に配置されている。鏡面233は、鏡面231よりも自動車290の進出方向側に、鏡面231と並べて配置されている。そして、鏡面233は、水平方向において、鏡面231から離れるほど、高速道路270から離れるような角度θ2を有して配置されている。なお、鏡面233は、この発明における「第3の鏡面」の一例であってよい。
【0065】
演算装置210は、デジタルカメラ250から順次出力される画像のデジタルデータの入力を受け付けると、その画像において、鏡230の鏡面231に、自動車290の後端部が映っているか否かを判定する。そして、演算装置210は、自動車290の後端部が映っていると判定すると、その画像を用いて、自動車290の車高H、車幅W、及び車長Lを演算により求める。
【0066】
図11は、デジタルカメラ250が撮像した画像I2の一例を示す。演算装置210の処理が上記の演算装置110と異なる点は、自動車290の車長Lを算出する処理である。
【0067】
具体的には、演算装置210は、上記の演算装置110が点M2を特定したのと同じようにして、画像I2における鏡面231に映った自動車290の鏡像の輪郭線上の、自動車190の後端部の上端部に対応する点M4を特定する。また、演算装置210は、上記の演算装置110が点M3を特定したのと同じようにして、鏡面232に映った自動車290の鏡像の輪郭線上の、自動車290の前端部(図示せず)に対応する点M5を特定する。また、演算装置210は、上記の演算装置110が点R3を特定したのと同じようにして、画像I2における、自動車290の実像の輪郭線上の、自動車290の後端部に対応する点R4を更に特定する。そして、演算装置210は、上記の演算装置110が車長Lを特定したのと同じようにして、点M4に対対応する鏡面231上の位置とデジタルカメラ250の位置との相対的な位置関係と、点M5に対応する鏡面233上の位置とデジタルカメラ250の位置との相対的な位置関係と、点R4に対応する自動車290上の位置とデジタルカメラ250の位置との相対的な位置関係とに更に基づいて、自動車290の車長Lを算出する。なお、点M4は、この発明における「第4の鏡像点」の一例であってよい。また、点M5は、この発明における「第5の鏡像点」の一例であってよい。また、点R4は、この発明における「第4の実像点」の一例であってよい。
【0068】
このように、車両寸法検出システム200においては、デジタルカメラ250が撮像した画像に自動車290の前端部が写っていなくても、その自動車290の車高H、車幅W、車長Lを検出することができる。
【0069】
図12及び図13は、更に別の実施形態に係る車両寸法検出システム300の利用環境の一例を示す。具体的には、図12は、高速道路370を、自動車390の進行方向側から見た状態を示す。また、図13は、高速道路370を、上方から見た状態を示す。車両寸法検出システム300が上記の車両寸法検出システム100、200と異なる点は、鏡330の鏡面である。車両寸法検出システム300において、上記の車両寸法検出システム100、200と同じ構成、機能、及び動作については、その詳細な説明を省略する。
【0070】
鏡330は、3つの鏡面331、332、333を有している。各鏡面231、332、233は、鉛直方向において、高速道路370の反対側に倒れるような角度θ1を有して配置されている。また、各鏡面331、332、333は、水平方向において、それぞれ異なる方向を向くように配置されている。具体的には、鏡面331は、高速道路370の延在方向と平行に配置されている。鏡面332は、鏡面331よりも自動車390の進入方向側に、鏡面331と並べて配置されている。鏡面333は、鏡面331よりも自動車390の進出方向側に、鏡面331と並べて配置されている。そして、鏡面332、333は、水平方向において、鏡面331から離れるほど、高速道路370から離れるような角度θ2を有して配置されている。
【0071】
演算装置310は、デジタルカメラ350から順次出力される画像のデジタルデータの入力を受け付けると、その画像において、鏡330の鏡面331に、自動車390が映っている状態で、その自動車390の前端部と後端部が映っているか否かを判定する。そして、演算装置310は、自動車390が映っている状態で、自動車390の前端部と後端部が映っていないと判定すると、その画像を用いて、自動車390の車高H、車幅W、及び車長Lを演算により求める。
【0072】
図14は、デジタルカメラ350が撮像した画像I3の一例を示す。演算装置310の処理が上記の演算装置110、210と異なる点は、自動車390の車長Lを算出する処理である。
【0073】
具体的には、演算装置310は、上記の演算装置110、210が車長Lを特定したのと同じようにして、点M3に対対応する鏡面332上の位置とデジタルカメラ350の位置との相対的な位置関係と、点M5に対応する鏡面333上の位置とデジタルカメラ250の位置との相対的な位置関係とに更に基づいて、自動車290の車長Lを算出する。
【0074】
このように、車両寸法検出システム200においては、デジタルカメラ250が撮像した画像に自動車390の前端部と後端部が写っていなくても、その自動車390の車高H、車幅W、車長Lを検出することができる。
【0075】
また、車両寸法検出システムにおいては、デジタルカメラの撮像範囲に赤外線を照射する赤外線照明を更に設けてよい。その場合、デジタルカメラは、高速道路を走行する自動車と、鏡に映った自動車の鏡像とを、赤外線だけを透過させるフィルターを通して撮像する赤外線カメラとする。このような構成とする場合、車両寸法検出システムにおいては、高速道路と鏡との間に、赤外線だけを透過させる壁体を設けてよい。
【0076】
このような構成とすることで、車両寸法検出システムにおいては、夜間や暗い場所においても、演算装置が車両の車高、車幅、及び車長を算出するために用いられる画像を得ることができる。更に、車両寸法検出システムにおいては、高速道路と鏡との間に、赤外線だけを透過させる壁体を設けることによって、陽射しが強い日中においても、鏡の前を通過する自動車のドライバーが、鏡によって反射する光の影響を受ける虞がない。
【0077】
なお、上記の例においては、平面の鏡面を用いた場合について説明したが、これに限るものではない。本発明に係る車両寸法検出システムにおける鏡は、車両の計測に必要な情報が得られるものであればよい。例えば、鏡面は、曲面であってもよい。曲面の鏡面としては、ある曲率を持った円曲面や楕円曲面等が考えられる。その場合、本発明に係る演算装置は、鏡面が持つ曲面の曲率に応じて適宜演算を行い、車両の各情報を取得する。
【0078】
図15は、演算装置110をコンピュータ等の電子情報処理装置でそれぞれ構成した場合のハードウェア構成の一例を示す。演算装置110は、CPU(Central Processing Unit)周辺部と、入出力部と、レガシー入出力部とを備える。CPU周辺部は、ホスト・コントローラ801により相互に接続されるCPU802、RAM(Random Access Memory)803、グラフィック・コントローラ804、及び表示装置805を有する。入出力部は、入出力コントローラ806によりホスト・コントローラ801に接続される通信インターフェイス807、ハードディスクドライブ808、及びCD−ROM(Compact Disk Read Only Memory)ドライブ809を有する。レガシー入出力部は、入出力コントローラ806に接続されるROM(Read Only Memory)810、フレキシブルディスク・ドライブ811、及び入出力チップ812を有する。
【0079】
ホスト・コントローラ801は、RAM803と、高い転送レートでRAM803をアクセスするCPU802、及びグラフィック・コントローラ804とを接続する。CPU802は、ROM810、及びRAM803に格納されたプログラムに基づいて動作して、各部の制御をする。グラフィック・コントローラ804は、CPU802等がRAM803内に設けたフレーム・バッファ上に生成する画像データを取得して、表示装置805上に表示させる。これに代えて、グラフィック・コントローラ804は、CPU802等が生成する画像データを格納するフレーム・バッファを、内部に含んでもよい。
【0080】
入出力コントローラ806は、ホスト・コントローラ801と、比較的高速な入出力装置であるハードディスクドライブ808、通信インターフェイス807、CD−ROMドライブ809を接続する。ハードディスクドライブ808は、CPU802が使用するプログラム、及びデータを格納する。通信インターフェイス807は、ネットワーク通信装置891に接続してプログラム又はデータを送受信する。CD−ROMドライブ809は、CD−ROM892からプログラム又はデータを読み取り、RAM803を介してハードディスクドライブ808、及び通信インターフェイス807に提供する。
【0081】
入出力コントローラ806には、ROM810と、フレキシブルディスク・ドライブ811、及び入出力チップ812の比較的低速な入出力装置とが接続される。ROM810は、演算装置110が起動時に実行するブート・プログラム、あるいは演算装置110のハードウェアに依存するプログラム等を格納する。フレキシブルディスク・ドライブ811は、フレキシブルディスク893からプログラム又はデータを読み取り、RAM803を介してハードディスクドライブ808、及び通信インターフェイス807に提供する。入出力チップ812は、フレキシブルディスク・ドライブ811、あるいはパラレル・ポート、シリアル・ポート、キーボード・ポート、マウス・ポート等を介して各種の入出力装置を接続する。
【0082】
CPU802が実行するプログラムは、フレキシブルディスク893、CD−ROM892、又はIC(Integrated Circuit)カード等の記録媒体に格納されて利用者によって提供される。記録媒体に格納されたプログラムは圧縮されていても非圧縮であってもよい。プログラムは、記録媒体からハードディスクドライブ808にインストールされ、RAM803に読み出されてCPU802により実行される。CPU802により実行されるプログラムは、演算装置110を、図1から図8に関連して説明した画像データ入力受付部111、画像判定部112、鏡像点特定部113、実像点特定部114、車両寸法算出部115、及び車両寸法データ送信部116として機能させる。
【0083】
以上に示したプログラムは、外部の記憶媒体に格納されてもよい。記憶媒体としては、フレキシブルディスク893、CD−ROM892の他に、DVD(Digital Versatile Disk)又はPD(Phase Disk)等の光学記録媒体、MD(MiniDisk)等の光磁気記録媒体、テープ媒体、ICカード等の半導体メモリ等を用いることができる。また、専用通信ネットワークあるいはインターネットに接続されたサーバシステムに設けたハードディスク又はRAM等の記憶媒体を記録媒体として使用して、ネットワークを介したプログラムとして提供してもよい。
【0084】
以上、本発明を実施の形態を用いて説明したが、本発明の技術的範囲は、上記実施の形態に記載の範囲には限定されない。上記実施の形態に、多様な変更又は改良を加えることが可能であることが当業者に明らかである。そのような変更又は改良を加えた形態も本発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。
【符号の説明】
【0085】
100 車両寸法検出システム
110 演算装置
111 画像データ入力受付部
112 画像判定部
113 鏡像点特定部
114 実像点特定部
115 車両寸法算出部
116 車両寸法出力部
130 鏡
131 鏡面
132 鏡面
150 デジタルカメラ
170 高速道路
190 自動車
200 車両寸法検出システム
210 演算装置
230 鏡
231 鏡面
233 鏡面
250 デジタルカメラ
270 高速道路
290 自動車
300 車両寸法検出システム
310 演算装置
330 鏡
331 鏡面
332 鏡面
333 鏡面
350 デジタルカメラ
370 高速道路
390 自動車
801 ホスト・コントローラ
802 CPU
803 RAM
804 グラフィック・コントローラ
805 表示装置
806 入出力コントローラ
807 通信インターフェイス
808 ハードディスクドライブ
809 CD−ROMドライブ
810 ROM
811 フレキシブルディスク・ドライブ
812 入出力チップ
891 ネットワーク通信装置
892 CD−ROM
893 フレキシブルディスク
【特許請求の範囲】
【請求項1】
車両通過帯を通過する車両の寸法を検出する車両寸法検出システムであって、
前記車両通過帯の側方に設けられて、当該車両通過帯を通過する車両を映す鏡と、
前記車両通過帯の上方に設けられて、当該車両通過帯を通過する車両と、前記鏡に映った当該車両の鏡像とを撮像する撮像装置と、
前記撮像装置と電気的に接続されて、前記撮像装置が撮像した画像における、前記車両の実像の輪郭線上の特徴的な複数の実像点と、前記鏡に映った当該車両の鏡像の輪郭線上の特徴的な複数の鏡像点とに基づいて、当該車両の寸法を演算により求める演算装置と
を備える車両寸法検出システム。
【請求項2】
前記鏡は、
前記車両通過帯の延在方向と平行に配置された第1の鏡面と、
前記第1の鏡面よりも前記車両の進入方向側に前記第1の鏡面と並べて配置された第2の鏡面と、前記第1の鏡面よりも前記車両の進出方向側に前記第1の鏡面と並べて配置された第3の鏡面とのうち、いずれか一方又は両方の鏡面と
を有し、
前記第1の鏡面、前記第2の鏡面、及び前記第3の鏡面は、それぞれ、鉛直方向において、前記車両通過帯の反対側に倒れるような角度を有して配置されており、
前記第2の鏡面、及び前記第3の鏡面は、それぞれ、水平方向において、前記第1の鏡面の端部から離れるほど、前記車両通過帯から離れるような角度を更に有して配置されている
請求項1に記載の車両寸法検出システム。
【請求項3】
前記第1の鏡面は、鉛直方向において並んで配列される複数の鏡面に分割され、当該分割された各鏡面は、水平方向から入射した光が前記撮像装置に向かって反射するように、水平面に対して、それぞれ異なる角度を有している
請求項2に記載の車両寸法検出システム。
【請求項4】
前記演算装置は、
少なくとも、前記撮像装置が撮像した画像における、前記第1の鏡面に映った前記車両の鏡像の輪郭線上の、少なくとも、前記車両の上端部に対応する第1の鏡像点を特定する鏡像点特定部と、
前記鏡像点特定部が特定した第1の鏡像点に対応する前記第1の鏡面上の位置と前記撮像装置の位置との相対的な位置関係に基づいて、少なくとも、前記車両の車高を算出する車両寸法算出部と
を有する請求項3に記載の車両寸法検出システム。
【請求項5】
前記演算装置は、
前記撮像装置が撮像した画像における、前記車両の実像の輪郭線上の、少なくとも、前記車両の一方の側端部に対応する第1の実像点と、前記車両の他方の側端部に対応する第2の実像点とを特定する実像点特定部
を更に有し、
前記車両寸法算出部は、前記実像点特定部が特定した第1の実像点及び第2の実像点にそれぞれに対応する前記車両上の各位置と前記撮像装置の位置との相対的な位置関係に更に基づいて、前記車両の車幅を更に算出する
請求項4に記載の車両寸法検出システム。
【請求項6】
前記鏡が前記第1の鏡面及び前記第2の鏡面だけを有している場合、
前記鏡像点特定部は、前記撮像装置が撮像した画像における、前記第1の鏡面に映った前記車両の鏡像の輪郭線上の、前記車両の前端部の上端部に対応する第2の鏡像点と、前記第2の鏡面に映った前記車両の鏡像の輪郭線上の、前記車両の後端部に対応する第3の鏡像点とを更に特定し、
前記実像点特定部は、前記撮像装置が撮像した画像における、前記車両の実像の輪郭線上の、前記車両の前端部に対応する第3の実像点を特定し、
前記車両寸法算出部は、前記鏡像点特定部が特定した第2の鏡像点に対応する前記第1の鏡面上の位置と前記撮像装置の位置との相対的な位置関係と、前記鏡像点特定部が特定した第3の鏡像点に対応する前記第2の鏡面上の位置と前記撮像装置の位置との相対的な位置関係と、前記実像点特定部が特定した第3の実像点に対応する前記車両上の位置と前記撮像装置の位置との相対的な位置関係とに更に基づいて、前記車両の車長を更に算出する
請求項5に記載の車両寸法検出システム。
【請求項7】
前記鏡が前記第1の鏡面及び前記第3の鏡面だけを有している場合、
前記鏡像点特定部は、前記撮像装置が撮像した画像における、前記第1の鏡面に映った前記車両の鏡像の輪郭線上の、前記車両の後端部の上端部に対応する第4の鏡像点と、前記第3の鏡面に映った前記車両の鏡像の輪郭線上の、前記車両の前端部に対応する第5の鏡像点とを更に特定し、
前記実像点特定部は、前記撮像装置が撮像した画像における、前記車両の実像の輪郭線上の、前記車両の後端部に対応する第4の実像点を特定し、
前記車両寸法算出部は、前記鏡像点特定部が特定した第4の鏡像点に対応する前記第1の鏡面上の位置と前記撮像装置の位置との相対的な位置関係と、前記鏡像点特定部が特定した第5の鏡像点に対応する前記第3の鏡面上の位置と前記撮像装置の位置との相対的な位置関係と、前記実像点特定部が特定した第4の実像点に対応する前記車両上の位置と前記撮像装置の位置との相対的な位置関係とに更に基づいて、前記車両の車長を更に算出する
請求項5に記載の車両寸法検出システム。
【請求項8】
前記鏡が前記第1の鏡面と前記第2の鏡面と前記第3の鏡面とを有している場合、
前記鏡像点特定部は、前記撮像装置が撮像した画像における、前記第2の鏡面に映った前記車両の鏡像の輪郭線上の、前記車両の後端部に対応する第3の鏡像点と、前記第3の鏡面に映った前記車両の鏡像の輪郭線上の、前記車両の前端部に対応する第5の鏡像点とを更に特定し、
前記車両寸法算出部は、前記鏡像点特定部が特定した第3の鏡像点に対応する前記第2の鏡面上の位置と前記撮像装置の位置との相対的な位置関係と、前記鏡像点特定部が特定した第5の鏡像点に対応する前記第3の鏡面上の位置と前記撮像装置の位置との相対的な位置関係とに更に基づいて、前記車両の車長を更に算出する
請求項5に記載の車両寸法検出システム。
【請求項9】
前記撮像装置の撮像範囲に赤外線を照射する赤外線照明
を更に備え、
前記撮像装置は、前記車両通過帯を通過する車両と、前記鏡に映った当該車両の鏡像とを、赤外線だけを透過させるフィルターを通して撮像する
請求項1から8のいずれか一項に記載の車両寸法検出システム。
【請求項10】
前記車両通過帯と前記鏡との間に設けられて、赤外線だけを透過させる壁体
を更に備える
請求項9に記載の車両寸法検出システム。
【請求項1】
車両通過帯を通過する車両の寸法を検出する車両寸法検出システムであって、
前記車両通過帯の側方に設けられて、当該車両通過帯を通過する車両を映す鏡と、
前記車両通過帯の上方に設けられて、当該車両通過帯を通過する車両と、前記鏡に映った当該車両の鏡像とを撮像する撮像装置と、
前記撮像装置と電気的に接続されて、前記撮像装置が撮像した画像における、前記車両の実像の輪郭線上の特徴的な複数の実像点と、前記鏡に映った当該車両の鏡像の輪郭線上の特徴的な複数の鏡像点とに基づいて、当該車両の寸法を演算により求める演算装置と
を備える車両寸法検出システム。
【請求項2】
前記鏡は、
前記車両通過帯の延在方向と平行に配置された第1の鏡面と、
前記第1の鏡面よりも前記車両の進入方向側に前記第1の鏡面と並べて配置された第2の鏡面と、前記第1の鏡面よりも前記車両の進出方向側に前記第1の鏡面と並べて配置された第3の鏡面とのうち、いずれか一方又は両方の鏡面と
を有し、
前記第1の鏡面、前記第2の鏡面、及び前記第3の鏡面は、それぞれ、鉛直方向において、前記車両通過帯の反対側に倒れるような角度を有して配置されており、
前記第2の鏡面、及び前記第3の鏡面は、それぞれ、水平方向において、前記第1の鏡面の端部から離れるほど、前記車両通過帯から離れるような角度を更に有して配置されている
請求項1に記載の車両寸法検出システム。
【請求項3】
前記第1の鏡面は、鉛直方向において並んで配列される複数の鏡面に分割され、当該分割された各鏡面は、水平方向から入射した光が前記撮像装置に向かって反射するように、水平面に対して、それぞれ異なる角度を有している
請求項2に記載の車両寸法検出システム。
【請求項4】
前記演算装置は、
少なくとも、前記撮像装置が撮像した画像における、前記第1の鏡面に映った前記車両の鏡像の輪郭線上の、少なくとも、前記車両の上端部に対応する第1の鏡像点を特定する鏡像点特定部と、
前記鏡像点特定部が特定した第1の鏡像点に対応する前記第1の鏡面上の位置と前記撮像装置の位置との相対的な位置関係に基づいて、少なくとも、前記車両の車高を算出する車両寸法算出部と
を有する請求項3に記載の車両寸法検出システム。
【請求項5】
前記演算装置は、
前記撮像装置が撮像した画像における、前記車両の実像の輪郭線上の、少なくとも、前記車両の一方の側端部に対応する第1の実像点と、前記車両の他方の側端部に対応する第2の実像点とを特定する実像点特定部
を更に有し、
前記車両寸法算出部は、前記実像点特定部が特定した第1の実像点及び第2の実像点にそれぞれに対応する前記車両上の各位置と前記撮像装置の位置との相対的な位置関係に更に基づいて、前記車両の車幅を更に算出する
請求項4に記載の車両寸法検出システム。
【請求項6】
前記鏡が前記第1の鏡面及び前記第2の鏡面だけを有している場合、
前記鏡像点特定部は、前記撮像装置が撮像した画像における、前記第1の鏡面に映った前記車両の鏡像の輪郭線上の、前記車両の前端部の上端部に対応する第2の鏡像点と、前記第2の鏡面に映った前記車両の鏡像の輪郭線上の、前記車両の後端部に対応する第3の鏡像点とを更に特定し、
前記実像点特定部は、前記撮像装置が撮像した画像における、前記車両の実像の輪郭線上の、前記車両の前端部に対応する第3の実像点を特定し、
前記車両寸法算出部は、前記鏡像点特定部が特定した第2の鏡像点に対応する前記第1の鏡面上の位置と前記撮像装置の位置との相対的な位置関係と、前記鏡像点特定部が特定した第3の鏡像点に対応する前記第2の鏡面上の位置と前記撮像装置の位置との相対的な位置関係と、前記実像点特定部が特定した第3の実像点に対応する前記車両上の位置と前記撮像装置の位置との相対的な位置関係とに更に基づいて、前記車両の車長を更に算出する
請求項5に記載の車両寸法検出システム。
【請求項7】
前記鏡が前記第1の鏡面及び前記第3の鏡面だけを有している場合、
前記鏡像点特定部は、前記撮像装置が撮像した画像における、前記第1の鏡面に映った前記車両の鏡像の輪郭線上の、前記車両の後端部の上端部に対応する第4の鏡像点と、前記第3の鏡面に映った前記車両の鏡像の輪郭線上の、前記車両の前端部に対応する第5の鏡像点とを更に特定し、
前記実像点特定部は、前記撮像装置が撮像した画像における、前記車両の実像の輪郭線上の、前記車両の後端部に対応する第4の実像点を特定し、
前記車両寸法算出部は、前記鏡像点特定部が特定した第4の鏡像点に対応する前記第1の鏡面上の位置と前記撮像装置の位置との相対的な位置関係と、前記鏡像点特定部が特定した第5の鏡像点に対応する前記第3の鏡面上の位置と前記撮像装置の位置との相対的な位置関係と、前記実像点特定部が特定した第4の実像点に対応する前記車両上の位置と前記撮像装置の位置との相対的な位置関係とに更に基づいて、前記車両の車長を更に算出する
請求項5に記載の車両寸法検出システム。
【請求項8】
前記鏡が前記第1の鏡面と前記第2の鏡面と前記第3の鏡面とを有している場合、
前記鏡像点特定部は、前記撮像装置が撮像した画像における、前記第2の鏡面に映った前記車両の鏡像の輪郭線上の、前記車両の後端部に対応する第3の鏡像点と、前記第3の鏡面に映った前記車両の鏡像の輪郭線上の、前記車両の前端部に対応する第5の鏡像点とを更に特定し、
前記車両寸法算出部は、前記鏡像点特定部が特定した第3の鏡像点に対応する前記第2の鏡面上の位置と前記撮像装置の位置との相対的な位置関係と、前記鏡像点特定部が特定した第5の鏡像点に対応する前記第3の鏡面上の位置と前記撮像装置の位置との相対的な位置関係とに更に基づいて、前記車両の車長を更に算出する
請求項5に記載の車両寸法検出システム。
【請求項9】
前記撮像装置の撮像範囲に赤外線を照射する赤外線照明
を更に備え、
前記撮像装置は、前記車両通過帯を通過する車両と、前記鏡に映った当該車両の鏡像とを、赤外線だけを透過させるフィルターを通して撮像する
請求項1から8のいずれか一項に記載の車両寸法検出システム。
【請求項10】
前記車両通過帯と前記鏡との間に設けられて、赤外線だけを透過させる壁体
を更に備える
請求項9に記載の車両寸法検出システム。
【図1】



【図2】
【図3】
【図4】

【図5】
【図6】

【図7】

【図8】
【図9】

【図10】
【図11】
【図12】

【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−22501(P2012−22501A)
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願番号】特願2010−159609(P2010−159609)
【出願日】平成22年7月14日(2010.7.14)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願日】平成22年7月14日(2010.7.14)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]