
車両情報提示装置
【課題】交差点を右折する場合や通過する場合に、ドライバが自らの目で視認して交通環境を確認して運転することを妨げることなく、ドライバが必要とするときに適切に必要な情報を提示して安全性を向上する。
【解決手段】情報処理部1は、自車両が抽出した交差点から設定距離以内の範囲にいる場合で、且つ、自車両が停止しており、且つ、ブレーキスイッチがONで、且つ、ドライバの交差点における車両の交通状況の画像の表示要求が確認された場合に、表示部7の表示領域にポップアップウインドウWを表示する。そして、ポップアップウインドウWを表示した後、アクセル操作が所定に行われた場合に、ポップアップウインドウWの表示を終了する。
【解決手段】情報処理部1は、自車両が抽出した交差点から設定距離以内の範囲にいる場合で、且つ、自車両が停止しており、且つ、ブレーキスイッチがONで、且つ、ドライバの交差点における車両の交通状況の画像の表示要求が確認された場合に、表示部7の表示領域にポップアップウインドウWを表示する。そして、ポップアップウインドウWを表示した後、アクセル操作が所定に行われた場合に、ポップアップウインドウWの表示を終了する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、交差点における交通状況を適切なタイミングでドライバに提示する車両情報提示装置に関する。
【背景技術】
【0002】
近年、車両においては、ITS(Intelligent Transport Systems)、車車間通信システム、車載の画像処理システム、レーダ装置等から得られる情報を基に、前方環境を認識し、安全な走行ができるように運転を支援する様々な運転支援装置が提案され、実用化されている。
【0003】
こうした運転支援装置の車両情報提示装置として、例えば、特開2002−340583号公報(以下、特許文献1)では、車車間通信、或いは、路車間通信により得られた他車両の情報を、自車両の情報とともに地図上に表示する装置において、自車両と他車両との運行状態を比較して、自車両の走行に影響を与えることが予想される他車両を特定し、特定した他車両を地図上にキャラクタとして表示するとともに、通信により得られた他車両の情報に従って、キャラクタの表示方法を変更して表示する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−340583号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、車両が交差点を右折する場合や通過する場合は、本来、ドライバが自らの目で視認して交通環境を確認して運転することが好ましいが、右折対向車や建物等が存在して死角が存在することがあり、このような場合に、上述の特許文献1に開示されるような情報提示装置は、ドライバの情報を補完する上で、その能力を大いに発揮することとなる。しかしながら、情報提示装置による表示が必要以上に行われると、ドライバの注視方向(関心)が実際の交通環境の認識に向かわず、情報提示装置に分散されることとなり、安全性向上という運転支援の本来の目的から逸脱してしまう虞がある。
【0006】
本発明は上記事情に鑑みてなされたもので、交差点を右折する場合や通過する場合に、ドライバが自らの目で視認して交通環境を確認して運転することを妨げることなく、ドライバが必要とするときに適切に必要な情報を提示して、安全性を向上することができる車両情報提示装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明は、車両間で通信を行う情報送受信手段と、自車両の位置を検出する自車位置検出手段と、表示手段に表示自在な道路地図データを格納する地図データ格納手段と、少なくとも交差点における車両の交通状況を上記表示手段で表現する画像データを格納する交差点画像データ格納手段と、上記道路地図データから自車両が進入する交差点を抽出し、該交差点の位置と自車両の位置とに基づいて、少なくとも自車両が上記交差点の位置から予め設定した範囲以内に存在し、且つ、自車両が停止している場合に、上記情報送受信手段で取得した情報を基に上記交差点画像データ格納手段の画像データで上記交差点における車両の交通状況の画像を生成して上記表示手段に表示する処理手段とを備えたことを特徴としている。
【発明の効果】
【0008】
本発明による車両情報提示装置によれば、交差点を右折する場合や通過する場合に、ドライバが自らの目で視認して交通環境を確認して運転することを妨げることなく、ドライバが必要とするときに適切に必要な情報を提示して、安全性を向上することが可能となる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の一形態に係る車両情報提示装置の構成図である。
【図2】本発明の実施の一形態に係る交差点進入時表示プログラムのフローチャートである。
【図3】本発明の実施の一形態に係る交差点ポップアップ表示処理ルーチンのフローチャートである。
【図4】本発明の実施の一形態に係る走行レーン検出処理ルーチンのフローチャートである。
【図5】本発明の実施の一形態に係るポップアップ表示生成出力処理ルーチンのフローチャートである。
【図6】本発明の実施の一形態に係る走行車両表示処理ルーチンのフローチャートである。
【図7】本発明の実施の一形態に係る車両の走行状況の一例を示す説明図である。
【図8】本発明の実施の一形態に係る対向車線の第1レーンと第2レーンとの境界を算出する手順を示す説明図である。
【図9】本発明の実施の一形態に係る表示部に通常表示されている道路地図画像の一例を示す説明図である。
【図10】本発明の実施の一形態に係る交差点進入時に表示部にポップアップウインドウを表示した状態の説明図である。
【図11】本発明の実施の一形態に係るポップアップウインドウの表示態様を示す説明図である。
【図12】本発明の実施の一形態に係るポップアップウインドウの他の表示態様を示す説明図である。
【図13】本発明の実施の一形態に係るポップアップウインドウ以外の表示態様を示す説明図である。
【発明を実施するための形態】
【0010】
以下、図面に基づいて本発明の実施の形態を説明する。
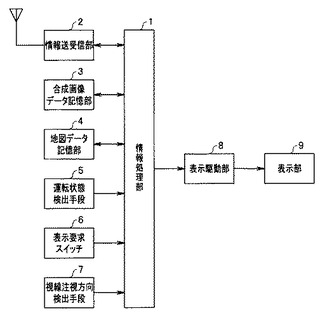
図1に示す車両情報提示装置はトラック、自動車、二輪車などの車両に搭載されており、マイクロコンピュータなどのコンピュータを主体に構成された情報処理部1を有している。この情報処理部1に情報送受信部2、合成画像データ記憶部3、地図データ記憶部4が双方向通信可能に接続されていると共に、入力側に運転状態検出手段5、表示要求スイッチ6、視線注視方向検出手段7が接続されている。また、この情報処理部1の出力側に表示駆動部8を介して液晶モニタなどの表示部9が接続されている。この表示部9はインストルメントパネル上の運転者の見やすい位置に配設されている。
【0011】
情報送受信部2は、無線LANなど100[m]程度の通信エリアを有する狭域無線通信を備えており、サーバなどを介さずに他の車両と直接通信を行い、情報の送受信を行う車車間通信機能と、複数のGPS衛星からの測位データを受信するGPS受信機能との双方を有している。
【0012】
車車間通信機能では、他の車両との相互通信により、車両情報、走行情報などを交換する。車両情報としては車種(本形態では、乗用車、トラック、二輪車の3車種)を示す固有情報があり、又、走行情報としては車速、位置情報、右左折時に発信されるウインカ情報などの状況によって変化する情報が含まれている。このように、情報送受信部2は、情報送受信手段、自車位置検出手段として設けられている。
【0013】
合成画像データ記憶部3には、交差点画像データ格納手段として設けられており、交差点における車両の交通状況を、後述するポップアップウインドウWに表示するアイコンデータなどが格納されている。
【0014】
地図データ記憶部4は、地図データ格納手段として設けられており、表示部9に道路地図画像として表示自在な地図データが格納されている。尚、合成画像データ記憶部3、及び地図データ記憶部4は、CD、DVD、ハードディスク(HDD)などの大容量記憶手段で構成されている。
【0015】
運転状態検出手段5は、自車両の運転状態を検出するセンサ・スイッチ類の総称であり、自車速V0を検出する車速センサ、アクセル開度θACCを検出するアクセル開度センサ、ブレーキの踏み込みを検出するブレーキスイッチ、右左折を事前に検知するターンシグナルスイッチなどがある。
【0016】
表示要求スイッチ6は、例えば、表示部9近傍等に設けられており、後述する如く、自車両が交差点で停止している等の条件が成立している際に、ドライバによりこの表示要求スイッチ6がONされた場合に、ポップアップウインドウによる交差点における車両情報の情報提示を行うようになっている。
【0017】
視線注視方向検出手段7は、例えば、所謂、瞳孔/角膜反射法により、ドライバの視線方向を検出するものであり、角膜上の赤外線ランプによる虚像が、角膜と眼球の回転中心の違いにより、眼球運動によって平行移動するのを視野カメラで瞳孔中心も同時に検出しながら瞳孔中心を基準として検出することで視線挙動の検出を行うようになっている。尚、視線方向の検出は、この検出法に限るものではなく、可能であれば、他の検出法(EOG(Electro-Oculography)法、強膜反射法、角膜反射法、サーチコイル法等)により検出するものであっても良い。
【0018】
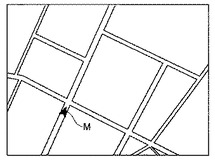
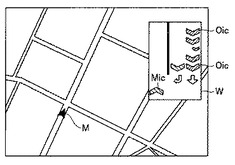
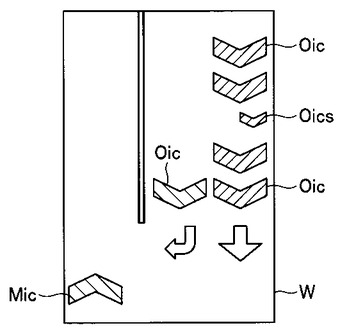
情報処理部1は、情報送受信部2で受信したGPS衛星からの測位情報に基づき地図データ記憶部4に格納されている地図データにマップマッチングさせて、表示部7に表示されている道路地図画像上にシンボル化された自車両Mを表示する(図9参照)。また、情報処理部1は、道路地図データから自車両が最初に進入する交差点を抽出すると共に、自車両が抽出した交差点から設定距離(例えば、交差点中心から30m)以内の範囲にいる場合で、且つ、自車両が停止しており、且つ、ブレーキスイッチがONで、且つ、ドライバの交差点における車両の交通状況の画像の表示要求が確認された場合(表示要求スイッチ6のON、或いは、ドライバのモニタ(表示部9)注視時間が2秒以上が確認された場合)に、表示部7の表示領域にポップアップウインドウWを表示する。このポップアップウインドウWには、車車間通信で得られた対向車両Oの情報に基づき、交差点に進入する車両のアイコンが表示される(図10参照)。特に、ポップアップウインドウWは、本実施の形態では、道路地図のナビゲーション表示に支障をきたさない一部の領域、例えば、右隅に表示する。そして、情報処理部1は、表示部7の表示領域にポップアップウインドウWを表示した後、アクセル操作が所定に行われた場合(例えば、アクセル開度θACCが10%以上となった時間が3秒以上継続された場合)に、ポップアップウインドウWの表示を終了する。このように、情報処理部1は、処理手段としての機能を有している。
【0019】
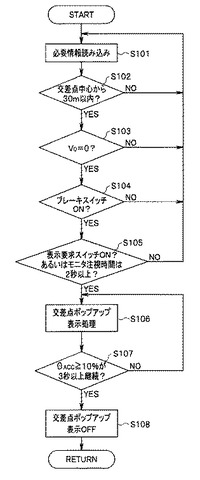
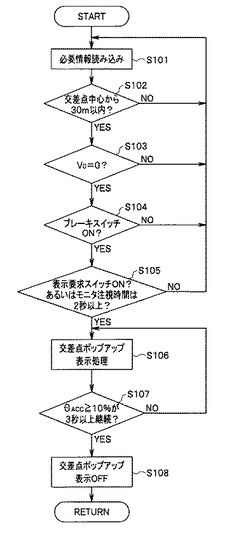
情報処理部1において実行される交差点進入時表示は、図2〜図6のフローチャートに従って処理される。図2に示す交差点進入時表示プログラムは、イグニッションスイッチをONした後、設定演算周期毎に起動され、先ず、ステップ(以下、「S」と略称)101で、必要情報を読み込む。
【0020】
そして、S102に進み、道路地図データから自車両が最初に進入する交差点を抽出すると共に、自車両が抽出した交差点から設定距離(例えば、交差点中心から30m)以内の範囲にいるか否かを判定する。このS102の判定の結果、自車両が抽出した交差点から設定距離(例えば、交差点中心から30m)以内の範囲にいる場合は、S103へ進み、設定距離(例えば、交差点中心から30m)以内の範囲に存在しない場合は、再び、S101からの処理を行う。
【0021】
S102の判定の結果、自車両が抽出した交差点から設定距離(例えば、交差点中心から30m)以内の範囲にいると判定されてS103に進むと、自車両が停止している(すなわち、V0=0)か否かの判定が行われる。そして、この判定の結果、自車両が停止している(V0=0)と判定された場合は、S104へ進み、自車両が停止していない(V0≠0)と判定された場合は、再び、S101からの処理を行う。
【0022】
S103の判定の結果、自車両が停止している(V0=0)と判定されて、S104に進むと、ブレーキスイッチがONされているか否か判定される。そして、この判定の結果、ブレーキスイッチがONされている場合は、S105へ進み、ブレーキスイッチがOFFの場合は、再び、S101からの処理を行う。
【0023】
S104の判定の結果、ブレーキスイッチがONされており、S105に進むと、ドライバの交差点における車両の交通状況の画像(ポップアップウインドウW)の表示要求が有るか否か確認される。この表示要求は、表示要求スイッチ6がON、或いは、ドライバのモニタ(表示部9)注視時間が2秒以上となっているか否かで確認される。そして、この判定の結果、ドライバの交差点における車両の交通状況の画像(ポップアップウインドウW)の表示要求が有る、すなわち、表示要求スイッチ6のON、或いは、ドライバのモニタ(表示部9)注視時間が2秒以上が確認された場合は、S106に進み、ドライバの交差点における車両の交通状況の画像(ポップアップウインドウW)の表示要求が確認されなかった場合は、再び、S101からの処理を行う。
【0024】
S105の判定の結果、ドライバの交差点における車両の交通状況の画像(ポップアップウインドウW)の表示要求が有ることが確認されて、S106に進むと、後述する交差点ポップアップ表示処理ルーチン(図3)に従って、表示部7の表示領域にポップアップウインドウWを表示する。
【0025】
その後、S107に進み、アクセル開度θACCが10%以上となった時間が3秒以上継続された否か判定され、アクセル開度θACCが10%以上となった時間が3秒以上継続された場合は、S108に進み、S106で表示したポップアップウインドウWをOFFしてプログラムを抜ける。また、アクセル開度θACCが10%以上となった時間が3秒以上継続されたことが検出されていない場合は、S106の処理に戻る。
【0026】
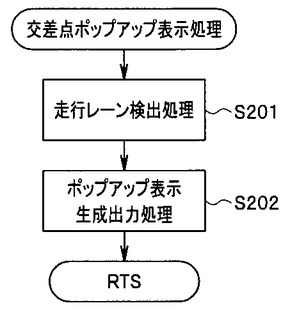
次に、上述のS106で実行される交差点ポップアップ表示処理ルーチンを、図3のフローチャートで説明する。
【0027】
まず、S201で、走行レーンの検出処理を実行する。すなわち、地図データ記憶部4に格納されている道路地図データにより表示部9に表示される道路は、交差点や属性が変化する点などに付されたノードと、各ノード間を接続するリンクとで表されており、このノードは道路中心線上に付されている。道路地図データでは、ノード間を接続するリンクで道路を表示しているに過ぎないため、例えば走行レーンが2レーンで構成されている場合であっても、そこを走行する対向車両Oは、路肩側の走行レーン(以下「第1レーン」と称する)を走行しているのか、センターライン側の走行レーン(以下「第2レーン」と称する)を走行しているのか判別することができない。
【0028】
従って、このS201では、自車両Mと対向車両Oとの相対位置から、前方対向車両Oが何れの走行レーンを走行しているかを判別する。この走行レーン検出処理は、図4に示す走行レーン検出処理のフローチャートに従って行われる。
【0029】
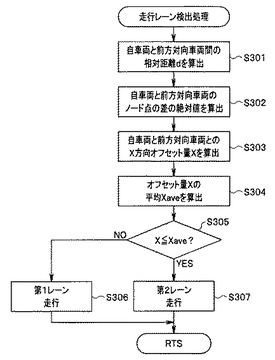
この走行レーン検出処理では、自車両Mを基準として前方対向車両Oとの道路幅方向の距離(オフセット量)Xを、複数台の前方対向車両Oについて算出し、オフセット量Xの平均値Xaveを算出し、この基準位置として平均値Xaveと、各前方対向車両Oのオフセット量Xとを比較して、前方対向車両Oの走行しているレーンを判定するようにしたものである。尚、本形態では前方対向車両Oの位置座標が不明な場合の態様であり、車車間通信により得られる走行情報に、前方対向車両Oの位置座標が含まれている場合は、この位置座標と自車両Mの位置座標との関係でオフセット量Xを求めることができる。
【0030】
先ず、S301で、自車両Mと前方対向車両Oとの車間相対距離dを算出する。自車両Mと対向車両Oとの車間相対距離dは、例えば車車間通信を用いて計測する。或いは自車両Mにミリ波レーダやステレオカメラが備えられている場合は、それらから得られる情報に基づいて車間相対距離dを計測することも可能である。
【0031】
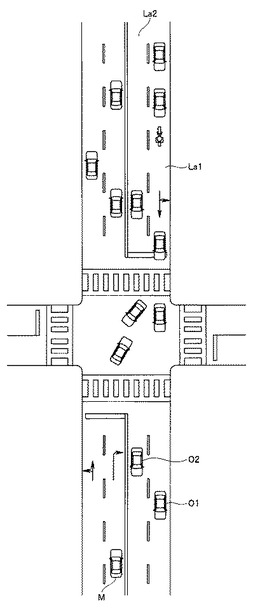
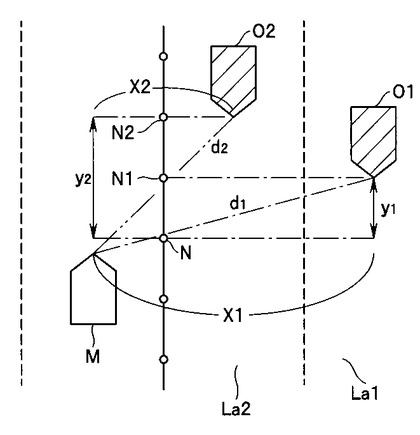
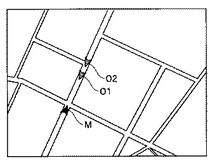
車車間通信を用いて車間相対距離dを計測する場合について簡単に説明する。まず、対向車線を走行している複数の前方対向車両Oを検出する。尚、図7、図8では2台の前方対向車両O1,O2が示されている。以下においては、2台の前方対向車両O1,O2を例示して説明する。そして、自車両Mと検出した各前方対向車両O1,O2との車車間通信における送受信時間(例えば、自車両Mが要求信号を送信した時刻から返信信号を受信した時刻までの時間)を各々計測し、この計測時間に基づいて、自車両Mと各前方対向車両O1,O2との車間相対距離d1,d2を算出する(図8参照)。
【0032】
次いで、S302へ進み、自車両Mと前方対向車両O1,O2とに対して最も近いノード番号N,N1,N2を検出し(図8参照)、自車両Mに近いノード番号Nと前方対向車両O1,O2に最も近いノード番号N1,N2との差の絶対値から前方相対距離y1,y2を各々算出する。
y1=|N−N1|
y2=|N−N2|
【0033】
図8に示すように、各ノード番号の付されている座標と、自車両M、及び前方対向車両O1,O2の位置座標とは必ずしも一致するものではないが、ノード番号は数メートル間隔で付されているため、ある程度の相対位置を割り出すことはできる。又、ノード間距離は常に一定はないが、ある程度距離に依存させることができる(ノード間距離≒k×ノード番号差 k:係数)。従って、ノード番号差から前方相対距離y1,y2を簡略して算出することができる。
【0034】
次いで、S303へ進み、車間相対距離d1,d2と前方相対距離y1,y2とに基づき、三平方の定理を用いて、自車両Mと前方対向車両O1,O2とのオフセット量X1,X2を算出する。
X1=(d12−y12)1/2
X2=(d22−y22)1/2
【0035】
次いで、S304へ進み、オフセット量X1,X2の平均値Xaveを算出する。尚、図8に示す例では、対向車線が二車線であり、各レーンを一台ずつの前方対向車両O1,O2が走行している場合について説明したが、3台以上の前方対向車両Oに基づいて平均値Xaveを算出するようにしても良い。
【0036】
その後、S305へ進み、各オフセット量Xと平均値Xaveとを比較し、X>Xaveのときは、S306へ進み、前方対向車両Oが第1レーンLa1を走行中と判定してルーチンを抜ける。また、X≦Xaveのときは、S307へ進み、前方対向車両Oが第2レーンLa2を走行中と判定してルーチンを抜ける。このように、本形態では、平均値Xaveを対向車線上の第1レーンLa1と第2レーンLa2との境界と見なしている。尚、図7、図8では、前方対向車両O1が第1レーンLa1を走行しており、前方対向車両O2が第2レーンLa2を走行している状態が示されている。
【0037】
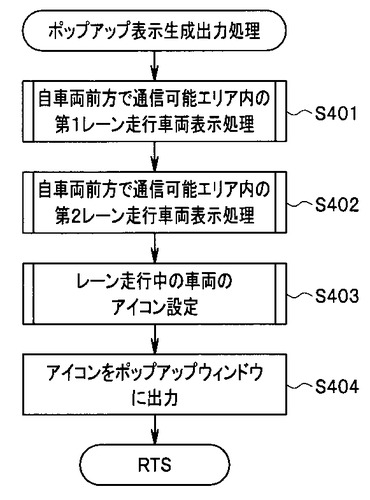
上述のS201の走行レーン検出処理を実行した後は、S202に進み、表示するポップアップウインドウWを生成して出力する処理を実行する。このポップアップ表示生成出力処理は、図5に示すポップアップ表示生成出力処理のフローチャートに従って行われる。
【0038】
このフローチャートでは、先ず、S401で、前述した図4に示す、S201の走行レーン検出処理で検出した、自車前方の車車間通信の可能エリア(例えば100[m])内における第1レーンLa1を走行中の全ての前方対向車両Oの車両情報、及び走行情報を読み込み、第1レーンLa1を走行している前方対向車両OのポップアップウインドウWに表示するアイコンの表示処理を実行する。また、S402では、同様に、図4に示す、S201の走行レーン検出処理で検出した、自車前方の車車間通信による通信可能エリア内における第2レーンLa2を走行中の全ての前方対向車両Oの車両情報、及び走行情報を読み込み、第2レーンLa2を走行している前方対向車両OのポップアップウインドウWに表示するアイコンの表示処理を実行する。
【0039】
このS401、S402で実行される表示処理は、図6に示す走行車両表示処理のフローチャートに従って、個別に行われる。S401、S402で実行される表示処理は共通しているため、まとめて説明する。
【0040】
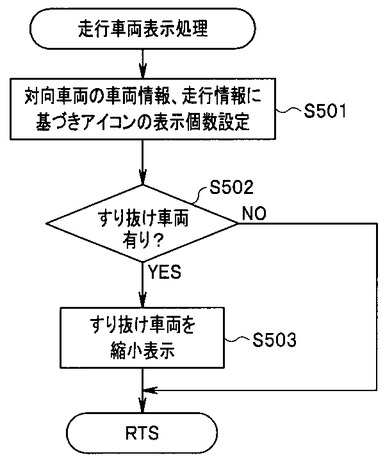
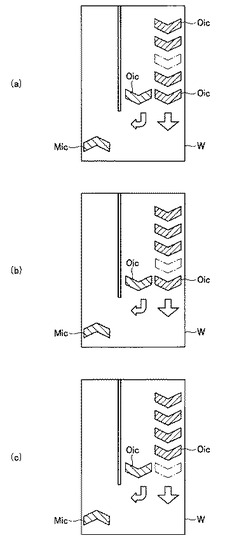
この走行車両表示処理では、先ず、S501で、車車間通信により得られた当該レーンLa1或いはLa2を走行中の前方対向車両Oの車両情報、走行情報に基づき、ポップアップウインドウWに表示するアイコンOicの表示個数を設定する。本形態では、図10に示すように、ポップアップウインドウWに表示するアイコンOicの最大個数は1列に5個であり、図11に一点鎖線で示すように、後続車の車間距離が予め設定される間隔(例えば10[m])以上離れている場合、その車間距離に応じてアイコンの表示を間隔を開けて(間引いて)表示するように設定されている。尚、図10、図11の符号Micは自車両Mのアイコンである。
【0041】
次いで、S502へ進み、すり抜け車両があるか否かを調べる。すり抜け車両とは、交差点で停止している対向車両をすり抜けて直進する対向車両で、主に対向二輪車である。当該ステップでは、各前方対向車両Oと後続の対向車両との車間距離、及び速度差からすり抜け車両の有無を調べて、すり抜け車両があるか否かを調べる。そして、すり抜け車両が無い場合は、ルーチンを抜ける。一方、すり抜け車両がある場合は、S503へ進み、当該車両に対応するアイコンOicsを縮小表示して(図12参照)、ルーチンを抜ける。
【0042】
そして、図5のS403へ進むと、S401、S402で設定した各走行レーンLa1,La2毎のアイコンOic表示個数に基づき、ポップアップウインドウWに表示するアイコンOicを設定し、S404へ進み、当該アイコンOicをポップアップウインドウWへ出力して、ルーチンを抜ける。
【0043】
このように、本発明の実施の形態によれば、自車両が抽出した交差点から設定距離以内の範囲にいる場合で、且つ、自車両が停止しており、且つ、ブレーキスイッチがONで、且つ、ドライバの交差点における車両の交通状況の画像の表示要求が確認された場合に、表示部7の表示領域にポップアップウインドウWを表示する。そして、ポップアップウインドウWを表示した後、アクセル操作が所定に行われた場合に、ポップアップウインドウWの表示を終了する。このため、交差点を右折する場合や通過する場合に、ドライバが自らの目で視認して交通環境を確認して運転することを妨げることなく、ドライバが必要とするときに適切に必要な情報を提示して、安全性を向上することが可能となる。
【0044】
尚、本実施の形態では、自車両が抽出した交差点から設定距離以内の範囲にいる場合で、且つ、自車両が停止しており、且つ、ブレーキスイッチがONで、且つ、ドライバの交差点における車両の交通状況の画像の表示要求が確認された場合に、ポップアップウインドウWを表示するようになっているが、ブレーキスイッチのON条件、及び、ドライバの交差点における車両の交通状況の画像の表示要求の確認の条件は、何れか一つの条件を、或いは、2つの条件を、仕様により省略しても良い。
【0045】
また、本実施の形態では、ポップアップウインドウWを表示部7の一部の表示領域に表示する例を説明したが、例えば、図13に示すように、ポップアップウインドウW以外にも、表示画面上に、他車両O1、O2のマークを表示するようにしても良い。この場合、自車両Mと、他車両O1、O2との判別が容易なように、例えば、自車両Mを赤(図中、黒塗りで示す)で示し、他車両O1、O2を青(図中、斜線で示す)等で区別する。
【符号の説明】
【0046】
1 情報処理部(処理手段)
2 情報送受信部(情報送受信手段、自車位置検出手段)
3 合成画像データ記憶部(交差点画像データ格納手段)
4 地図データ記憶部(地図データ格納手段)
5 運転状態検出手段
6 表示要求スイッチ
7 視線注視方向検出手段
8 表示駆動部
9 表示部(表示手段)
【技術分野】
【0001】
本発明は、交差点における交通状況を適切なタイミングでドライバに提示する車両情報提示装置に関する。
【背景技術】
【0002】
近年、車両においては、ITS(Intelligent Transport Systems)、車車間通信システム、車載の画像処理システム、レーダ装置等から得られる情報を基に、前方環境を認識し、安全な走行ができるように運転を支援する様々な運転支援装置が提案され、実用化されている。
【0003】
こうした運転支援装置の車両情報提示装置として、例えば、特開2002−340583号公報(以下、特許文献1)では、車車間通信、或いは、路車間通信により得られた他車両の情報を、自車両の情報とともに地図上に表示する装置において、自車両と他車両との運行状態を比較して、自車両の走行に影響を与えることが予想される他車両を特定し、特定した他車両を地図上にキャラクタとして表示するとともに、通信により得られた他車両の情報に従って、キャラクタの表示方法を変更して表示する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−340583号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、車両が交差点を右折する場合や通過する場合は、本来、ドライバが自らの目で視認して交通環境を確認して運転することが好ましいが、右折対向車や建物等が存在して死角が存在することがあり、このような場合に、上述の特許文献1に開示されるような情報提示装置は、ドライバの情報を補完する上で、その能力を大いに発揮することとなる。しかしながら、情報提示装置による表示が必要以上に行われると、ドライバの注視方向(関心)が実際の交通環境の認識に向かわず、情報提示装置に分散されることとなり、安全性向上という運転支援の本来の目的から逸脱してしまう虞がある。
【0006】
本発明は上記事情に鑑みてなされたもので、交差点を右折する場合や通過する場合に、ドライバが自らの目で視認して交通環境を確認して運転することを妨げることなく、ドライバが必要とするときに適切に必要な情報を提示して、安全性を向上することができる車両情報提示装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明は、車両間で通信を行う情報送受信手段と、自車両の位置を検出する自車位置検出手段と、表示手段に表示自在な道路地図データを格納する地図データ格納手段と、少なくとも交差点における車両の交通状況を上記表示手段で表現する画像データを格納する交差点画像データ格納手段と、上記道路地図データから自車両が進入する交差点を抽出し、該交差点の位置と自車両の位置とに基づいて、少なくとも自車両が上記交差点の位置から予め設定した範囲以内に存在し、且つ、自車両が停止している場合に、上記情報送受信手段で取得した情報を基に上記交差点画像データ格納手段の画像データで上記交差点における車両の交通状況の画像を生成して上記表示手段に表示する処理手段とを備えたことを特徴としている。
【発明の効果】
【0008】
本発明による車両情報提示装置によれば、交差点を右折する場合や通過する場合に、ドライバが自らの目で視認して交通環境を確認して運転することを妨げることなく、ドライバが必要とするときに適切に必要な情報を提示して、安全性を向上することが可能となる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の一形態に係る車両情報提示装置の構成図である。
【図2】本発明の実施の一形態に係る交差点進入時表示プログラムのフローチャートである。
【図3】本発明の実施の一形態に係る交差点ポップアップ表示処理ルーチンのフローチャートである。
【図4】本発明の実施の一形態に係る走行レーン検出処理ルーチンのフローチャートである。
【図5】本発明の実施の一形態に係るポップアップ表示生成出力処理ルーチンのフローチャートである。
【図6】本発明の実施の一形態に係る走行車両表示処理ルーチンのフローチャートである。
【図7】本発明の実施の一形態に係る車両の走行状況の一例を示す説明図である。
【図8】本発明の実施の一形態に係る対向車線の第1レーンと第2レーンとの境界を算出する手順を示す説明図である。
【図9】本発明の実施の一形態に係る表示部に通常表示されている道路地図画像の一例を示す説明図である。
【図10】本発明の実施の一形態に係る交差点進入時に表示部にポップアップウインドウを表示した状態の説明図である。
【図11】本発明の実施の一形態に係るポップアップウインドウの表示態様を示す説明図である。
【図12】本発明の実施の一形態に係るポップアップウインドウの他の表示態様を示す説明図である。
【図13】本発明の実施の一形態に係るポップアップウインドウ以外の表示態様を示す説明図である。
【発明を実施するための形態】
【0010】
以下、図面に基づいて本発明の実施の形態を説明する。
図1に示す車両情報提示装置はトラック、自動車、二輪車などの車両に搭載されており、マイクロコンピュータなどのコンピュータを主体に構成された情報処理部1を有している。この情報処理部1に情報送受信部2、合成画像データ記憶部3、地図データ記憶部4が双方向通信可能に接続されていると共に、入力側に運転状態検出手段5、表示要求スイッチ6、視線注視方向検出手段7が接続されている。また、この情報処理部1の出力側に表示駆動部8を介して液晶モニタなどの表示部9が接続されている。この表示部9はインストルメントパネル上の運転者の見やすい位置に配設されている。
【0011】
情報送受信部2は、無線LANなど100[m]程度の通信エリアを有する狭域無線通信を備えており、サーバなどを介さずに他の車両と直接通信を行い、情報の送受信を行う車車間通信機能と、複数のGPS衛星からの測位データを受信するGPS受信機能との双方を有している。
【0012】
車車間通信機能では、他の車両との相互通信により、車両情報、走行情報などを交換する。車両情報としては車種(本形態では、乗用車、トラック、二輪車の3車種)を示す固有情報があり、又、走行情報としては車速、位置情報、右左折時に発信されるウインカ情報などの状況によって変化する情報が含まれている。このように、情報送受信部2は、情報送受信手段、自車位置検出手段として設けられている。
【0013】
合成画像データ記憶部3には、交差点画像データ格納手段として設けられており、交差点における車両の交通状況を、後述するポップアップウインドウWに表示するアイコンデータなどが格納されている。
【0014】
地図データ記憶部4は、地図データ格納手段として設けられており、表示部9に道路地図画像として表示自在な地図データが格納されている。尚、合成画像データ記憶部3、及び地図データ記憶部4は、CD、DVD、ハードディスク(HDD)などの大容量記憶手段で構成されている。
【0015】
運転状態検出手段5は、自車両の運転状態を検出するセンサ・スイッチ類の総称であり、自車速V0を検出する車速センサ、アクセル開度θACCを検出するアクセル開度センサ、ブレーキの踏み込みを検出するブレーキスイッチ、右左折を事前に検知するターンシグナルスイッチなどがある。
【0016】
表示要求スイッチ6は、例えば、表示部9近傍等に設けられており、後述する如く、自車両が交差点で停止している等の条件が成立している際に、ドライバによりこの表示要求スイッチ6がONされた場合に、ポップアップウインドウによる交差点における車両情報の情報提示を行うようになっている。
【0017】
視線注視方向検出手段7は、例えば、所謂、瞳孔/角膜反射法により、ドライバの視線方向を検出するものであり、角膜上の赤外線ランプによる虚像が、角膜と眼球の回転中心の違いにより、眼球運動によって平行移動するのを視野カメラで瞳孔中心も同時に検出しながら瞳孔中心を基準として検出することで視線挙動の検出を行うようになっている。尚、視線方向の検出は、この検出法に限るものではなく、可能であれば、他の検出法(EOG(Electro-Oculography)法、強膜反射法、角膜反射法、サーチコイル法等)により検出するものであっても良い。
【0018】
情報処理部1は、情報送受信部2で受信したGPS衛星からの測位情報に基づき地図データ記憶部4に格納されている地図データにマップマッチングさせて、表示部7に表示されている道路地図画像上にシンボル化された自車両Mを表示する(図9参照)。また、情報処理部1は、道路地図データから自車両が最初に進入する交差点を抽出すると共に、自車両が抽出した交差点から設定距離(例えば、交差点中心から30m)以内の範囲にいる場合で、且つ、自車両が停止しており、且つ、ブレーキスイッチがONで、且つ、ドライバの交差点における車両の交通状況の画像の表示要求が確認された場合(表示要求スイッチ6のON、或いは、ドライバのモニタ(表示部9)注視時間が2秒以上が確認された場合)に、表示部7の表示領域にポップアップウインドウWを表示する。このポップアップウインドウWには、車車間通信で得られた対向車両Oの情報に基づき、交差点に進入する車両のアイコンが表示される(図10参照)。特に、ポップアップウインドウWは、本実施の形態では、道路地図のナビゲーション表示に支障をきたさない一部の領域、例えば、右隅に表示する。そして、情報処理部1は、表示部7の表示領域にポップアップウインドウWを表示した後、アクセル操作が所定に行われた場合(例えば、アクセル開度θACCが10%以上となった時間が3秒以上継続された場合)に、ポップアップウインドウWの表示を終了する。このように、情報処理部1は、処理手段としての機能を有している。
【0019】
情報処理部1において実行される交差点進入時表示は、図2〜図6のフローチャートに従って処理される。図2に示す交差点進入時表示プログラムは、イグニッションスイッチをONした後、設定演算周期毎に起動され、先ず、ステップ(以下、「S」と略称)101で、必要情報を読み込む。
【0020】
そして、S102に進み、道路地図データから自車両が最初に進入する交差点を抽出すると共に、自車両が抽出した交差点から設定距離(例えば、交差点中心から30m)以内の範囲にいるか否かを判定する。このS102の判定の結果、自車両が抽出した交差点から設定距離(例えば、交差点中心から30m)以内の範囲にいる場合は、S103へ進み、設定距離(例えば、交差点中心から30m)以内の範囲に存在しない場合は、再び、S101からの処理を行う。
【0021】
S102の判定の結果、自車両が抽出した交差点から設定距離(例えば、交差点中心から30m)以内の範囲にいると判定されてS103に進むと、自車両が停止している(すなわち、V0=0)か否かの判定が行われる。そして、この判定の結果、自車両が停止している(V0=0)と判定された場合は、S104へ進み、自車両が停止していない(V0≠0)と判定された場合は、再び、S101からの処理を行う。
【0022】
S103の判定の結果、自車両が停止している(V0=0)と判定されて、S104に進むと、ブレーキスイッチがONされているか否か判定される。そして、この判定の結果、ブレーキスイッチがONされている場合は、S105へ進み、ブレーキスイッチがOFFの場合は、再び、S101からの処理を行う。
【0023】
S104の判定の結果、ブレーキスイッチがONされており、S105に進むと、ドライバの交差点における車両の交通状況の画像(ポップアップウインドウW)の表示要求が有るか否か確認される。この表示要求は、表示要求スイッチ6がON、或いは、ドライバのモニタ(表示部9)注視時間が2秒以上となっているか否かで確認される。そして、この判定の結果、ドライバの交差点における車両の交通状況の画像(ポップアップウインドウW)の表示要求が有る、すなわち、表示要求スイッチ6のON、或いは、ドライバのモニタ(表示部9)注視時間が2秒以上が確認された場合は、S106に進み、ドライバの交差点における車両の交通状況の画像(ポップアップウインドウW)の表示要求が確認されなかった場合は、再び、S101からの処理を行う。
【0024】
S105の判定の結果、ドライバの交差点における車両の交通状況の画像(ポップアップウインドウW)の表示要求が有ることが確認されて、S106に進むと、後述する交差点ポップアップ表示処理ルーチン(図3)に従って、表示部7の表示領域にポップアップウインドウWを表示する。
【0025】
その後、S107に進み、アクセル開度θACCが10%以上となった時間が3秒以上継続された否か判定され、アクセル開度θACCが10%以上となった時間が3秒以上継続された場合は、S108に進み、S106で表示したポップアップウインドウWをOFFしてプログラムを抜ける。また、アクセル開度θACCが10%以上となった時間が3秒以上継続されたことが検出されていない場合は、S106の処理に戻る。
【0026】
次に、上述のS106で実行される交差点ポップアップ表示処理ルーチンを、図3のフローチャートで説明する。
【0027】
まず、S201で、走行レーンの検出処理を実行する。すなわち、地図データ記憶部4に格納されている道路地図データにより表示部9に表示される道路は、交差点や属性が変化する点などに付されたノードと、各ノード間を接続するリンクとで表されており、このノードは道路中心線上に付されている。道路地図データでは、ノード間を接続するリンクで道路を表示しているに過ぎないため、例えば走行レーンが2レーンで構成されている場合であっても、そこを走行する対向車両Oは、路肩側の走行レーン(以下「第1レーン」と称する)を走行しているのか、センターライン側の走行レーン(以下「第2レーン」と称する)を走行しているのか判別することができない。
【0028】
従って、このS201では、自車両Mと対向車両Oとの相対位置から、前方対向車両Oが何れの走行レーンを走行しているかを判別する。この走行レーン検出処理は、図4に示す走行レーン検出処理のフローチャートに従って行われる。
【0029】
この走行レーン検出処理では、自車両Mを基準として前方対向車両Oとの道路幅方向の距離(オフセット量)Xを、複数台の前方対向車両Oについて算出し、オフセット量Xの平均値Xaveを算出し、この基準位置として平均値Xaveと、各前方対向車両Oのオフセット量Xとを比較して、前方対向車両Oの走行しているレーンを判定するようにしたものである。尚、本形態では前方対向車両Oの位置座標が不明な場合の態様であり、車車間通信により得られる走行情報に、前方対向車両Oの位置座標が含まれている場合は、この位置座標と自車両Mの位置座標との関係でオフセット量Xを求めることができる。
【0030】
先ず、S301で、自車両Mと前方対向車両Oとの車間相対距離dを算出する。自車両Mと対向車両Oとの車間相対距離dは、例えば車車間通信を用いて計測する。或いは自車両Mにミリ波レーダやステレオカメラが備えられている場合は、それらから得られる情報に基づいて車間相対距離dを計測することも可能である。
【0031】
車車間通信を用いて車間相対距離dを計測する場合について簡単に説明する。まず、対向車線を走行している複数の前方対向車両Oを検出する。尚、図7、図8では2台の前方対向車両O1,O2が示されている。以下においては、2台の前方対向車両O1,O2を例示して説明する。そして、自車両Mと検出した各前方対向車両O1,O2との車車間通信における送受信時間(例えば、自車両Mが要求信号を送信した時刻から返信信号を受信した時刻までの時間)を各々計測し、この計測時間に基づいて、自車両Mと各前方対向車両O1,O2との車間相対距離d1,d2を算出する(図8参照)。
【0032】
次いで、S302へ進み、自車両Mと前方対向車両O1,O2とに対して最も近いノード番号N,N1,N2を検出し(図8参照)、自車両Mに近いノード番号Nと前方対向車両O1,O2に最も近いノード番号N1,N2との差の絶対値から前方相対距離y1,y2を各々算出する。
y1=|N−N1|
y2=|N−N2|
【0033】
図8に示すように、各ノード番号の付されている座標と、自車両M、及び前方対向車両O1,O2の位置座標とは必ずしも一致するものではないが、ノード番号は数メートル間隔で付されているため、ある程度の相対位置を割り出すことはできる。又、ノード間距離は常に一定はないが、ある程度距離に依存させることができる(ノード間距離≒k×ノード番号差 k:係数)。従って、ノード番号差から前方相対距離y1,y2を簡略して算出することができる。
【0034】
次いで、S303へ進み、車間相対距離d1,d2と前方相対距離y1,y2とに基づき、三平方の定理を用いて、自車両Mと前方対向車両O1,O2とのオフセット量X1,X2を算出する。
X1=(d12−y12)1/2
X2=(d22−y22)1/2
【0035】
次いで、S304へ進み、オフセット量X1,X2の平均値Xaveを算出する。尚、図8に示す例では、対向車線が二車線であり、各レーンを一台ずつの前方対向車両O1,O2が走行している場合について説明したが、3台以上の前方対向車両Oに基づいて平均値Xaveを算出するようにしても良い。
【0036】
その後、S305へ進み、各オフセット量Xと平均値Xaveとを比較し、X>Xaveのときは、S306へ進み、前方対向車両Oが第1レーンLa1を走行中と判定してルーチンを抜ける。また、X≦Xaveのときは、S307へ進み、前方対向車両Oが第2レーンLa2を走行中と判定してルーチンを抜ける。このように、本形態では、平均値Xaveを対向車線上の第1レーンLa1と第2レーンLa2との境界と見なしている。尚、図7、図8では、前方対向車両O1が第1レーンLa1を走行しており、前方対向車両O2が第2レーンLa2を走行している状態が示されている。
【0037】
上述のS201の走行レーン検出処理を実行した後は、S202に進み、表示するポップアップウインドウWを生成して出力する処理を実行する。このポップアップ表示生成出力処理は、図5に示すポップアップ表示生成出力処理のフローチャートに従って行われる。
【0038】
このフローチャートでは、先ず、S401で、前述した図4に示す、S201の走行レーン検出処理で検出した、自車前方の車車間通信の可能エリア(例えば100[m])内における第1レーンLa1を走行中の全ての前方対向車両Oの車両情報、及び走行情報を読み込み、第1レーンLa1を走行している前方対向車両OのポップアップウインドウWに表示するアイコンの表示処理を実行する。また、S402では、同様に、図4に示す、S201の走行レーン検出処理で検出した、自車前方の車車間通信による通信可能エリア内における第2レーンLa2を走行中の全ての前方対向車両Oの車両情報、及び走行情報を読み込み、第2レーンLa2を走行している前方対向車両OのポップアップウインドウWに表示するアイコンの表示処理を実行する。
【0039】
このS401、S402で実行される表示処理は、図6に示す走行車両表示処理のフローチャートに従って、個別に行われる。S401、S402で実行される表示処理は共通しているため、まとめて説明する。
【0040】
この走行車両表示処理では、先ず、S501で、車車間通信により得られた当該レーンLa1或いはLa2を走行中の前方対向車両Oの車両情報、走行情報に基づき、ポップアップウインドウWに表示するアイコンOicの表示個数を設定する。本形態では、図10に示すように、ポップアップウインドウWに表示するアイコンOicの最大個数は1列に5個であり、図11に一点鎖線で示すように、後続車の車間距離が予め設定される間隔(例えば10[m])以上離れている場合、その車間距離に応じてアイコンの表示を間隔を開けて(間引いて)表示するように設定されている。尚、図10、図11の符号Micは自車両Mのアイコンである。
【0041】
次いで、S502へ進み、すり抜け車両があるか否かを調べる。すり抜け車両とは、交差点で停止している対向車両をすり抜けて直進する対向車両で、主に対向二輪車である。当該ステップでは、各前方対向車両Oと後続の対向車両との車間距離、及び速度差からすり抜け車両の有無を調べて、すり抜け車両があるか否かを調べる。そして、すり抜け車両が無い場合は、ルーチンを抜ける。一方、すり抜け車両がある場合は、S503へ進み、当該車両に対応するアイコンOicsを縮小表示して(図12参照)、ルーチンを抜ける。
【0042】
そして、図5のS403へ進むと、S401、S402で設定した各走行レーンLa1,La2毎のアイコンOic表示個数に基づき、ポップアップウインドウWに表示するアイコンOicを設定し、S404へ進み、当該アイコンOicをポップアップウインドウWへ出力して、ルーチンを抜ける。
【0043】
このように、本発明の実施の形態によれば、自車両が抽出した交差点から設定距離以内の範囲にいる場合で、且つ、自車両が停止しており、且つ、ブレーキスイッチがONで、且つ、ドライバの交差点における車両の交通状況の画像の表示要求が確認された場合に、表示部7の表示領域にポップアップウインドウWを表示する。そして、ポップアップウインドウWを表示した後、アクセル操作が所定に行われた場合に、ポップアップウインドウWの表示を終了する。このため、交差点を右折する場合や通過する場合に、ドライバが自らの目で視認して交通環境を確認して運転することを妨げることなく、ドライバが必要とするときに適切に必要な情報を提示して、安全性を向上することが可能となる。
【0044】
尚、本実施の形態では、自車両が抽出した交差点から設定距離以内の範囲にいる場合で、且つ、自車両が停止しており、且つ、ブレーキスイッチがONで、且つ、ドライバの交差点における車両の交通状況の画像の表示要求が確認された場合に、ポップアップウインドウWを表示するようになっているが、ブレーキスイッチのON条件、及び、ドライバの交差点における車両の交通状況の画像の表示要求の確認の条件は、何れか一つの条件を、或いは、2つの条件を、仕様により省略しても良い。
【0045】
また、本実施の形態では、ポップアップウインドウWを表示部7の一部の表示領域に表示する例を説明したが、例えば、図13に示すように、ポップアップウインドウW以外にも、表示画面上に、他車両O1、O2のマークを表示するようにしても良い。この場合、自車両Mと、他車両O1、O2との判別が容易なように、例えば、自車両Mを赤(図中、黒塗りで示す)で示し、他車両O1、O2を青(図中、斜線で示す)等で区別する。
【符号の説明】
【0046】
1 情報処理部(処理手段)
2 情報送受信部(情報送受信手段、自車位置検出手段)
3 合成画像データ記憶部(交差点画像データ格納手段)
4 地図データ記憶部(地図データ格納手段)
5 運転状態検出手段
6 表示要求スイッチ
7 視線注視方向検出手段
8 表示駆動部
9 表示部(表示手段)
【特許請求の範囲】
【請求項1】
車両間で通信を行う情報送受信手段と、
自車両の位置を検出する自車位置検出手段と、
表示手段に表示自在な道路地図データを格納する地図データ格納手段と、
少なくとも交差点における車両の交通状況を上記表示手段で表現する画像データを格納する交差点画像データ格納手段と、
上記道路地図データから自車両が進入する交差点を抽出し、該交差点の位置と自車両の位置とに基づいて、少なくとも自車両が上記交差点の位置から予め設定した範囲以内に存在し、且つ、自車両が停止している場合に、上記情報送受信手段で取得した情報を基に上記交差点画像データ格納手段の画像データで上記交差点における車両の交通状況の画像を生成して上記表示手段に表示する処理手段と、
を備えたことを特徴とする車両情報提示装置。
【請求項2】
上記処理手段は、上記道路地図データから自車両が進入する交差点を抽出し、該交差点の位置と自車両の位置とに基づいて、少なくとも自車両が上記交差点の位置から予め設定した範囲以内に存在し、且つ、自車両が停止している場合で、且つ、ブレーキスイッチがONの場合に、上記情報送受信手段で取得した情報を基に上記交差点画像データ格納手段の画像データで上記交差点における車両の交通状況の画像を生成して上記表示手段に表示することを特徴とする請求項1記載の車両情報提示装置。
【請求項3】
上記処理手段は、上記道路地図データから自車両が進入する交差点を抽出し、該交差点の位置と自車両の位置とに基づいて、少なくとも自車両が上記交差点の位置から予め設定した範囲以内に存在し、且つ、自車両が停止している場合で、且つ、ブレーキスイッチがONで、且つ、ドライバの上記交差点における車両の交通状況の画像の表示要求が確認された場合に、上記情報送受信手段で取得した情報を基に上記交差点画像データ格納手段の画像データで上記交差点における車両の交通状況の画像を生成して上記表示手段に表示することを特徴とする請求項2記載の車両情報提示装置。
【請求項4】
上記ドライバの上記交差点における車両の交通状況の画像の表示要求は、予め配設したスイッチがON操作された場合と、車載したドライバの視線注視方向検出手段で検出したドライバが上記表示手段を注視する時間が設定時間以上となった場合の少なくともどちらかの場合に上記表示要求があると判断することを特徴とする請求項3記載の車両情報提示装置。
【請求項5】
上記処理手段は、上記表示手段に上記交差点における車両の交通状況の画像を表示した後、アクセル操作が所定に行われた場合は、上記交差点における車両の交通状況の画像の表示を終了することを特徴とする請求項1乃至請求項4の何れか一つに記載の車両情報提示装置。
【請求項6】
上記処理手段は、上記自車位置検出手段で検出した自車両の位置を上記地図データ格納手段に格納されている地図データにマップマッチングさせて上記表示手段に表示させ、上記交差点における車両の交通状況の画像を表示する際は、該交差点における車両の交通状況の画像は、上記表示している地図データの一部又は全部に換えて表示することを特徴とする請求項1乃至請求項5の何れか一つに記載の車両情報提示装置。
【請求項1】
車両間で通信を行う情報送受信手段と、
自車両の位置を検出する自車位置検出手段と、
表示手段に表示自在な道路地図データを格納する地図データ格納手段と、
少なくとも交差点における車両の交通状況を上記表示手段で表現する画像データを格納する交差点画像データ格納手段と、
上記道路地図データから自車両が進入する交差点を抽出し、該交差点の位置と自車両の位置とに基づいて、少なくとも自車両が上記交差点の位置から予め設定した範囲以内に存在し、且つ、自車両が停止している場合に、上記情報送受信手段で取得した情報を基に上記交差点画像データ格納手段の画像データで上記交差点における車両の交通状況の画像を生成して上記表示手段に表示する処理手段と、
を備えたことを特徴とする車両情報提示装置。
【請求項2】
上記処理手段は、上記道路地図データから自車両が進入する交差点を抽出し、該交差点の位置と自車両の位置とに基づいて、少なくとも自車両が上記交差点の位置から予め設定した範囲以内に存在し、且つ、自車両が停止している場合で、且つ、ブレーキスイッチがONの場合に、上記情報送受信手段で取得した情報を基に上記交差点画像データ格納手段の画像データで上記交差点における車両の交通状況の画像を生成して上記表示手段に表示することを特徴とする請求項1記載の車両情報提示装置。
【請求項3】
上記処理手段は、上記道路地図データから自車両が進入する交差点を抽出し、該交差点の位置と自車両の位置とに基づいて、少なくとも自車両が上記交差点の位置から予め設定した範囲以内に存在し、且つ、自車両が停止している場合で、且つ、ブレーキスイッチがONで、且つ、ドライバの上記交差点における車両の交通状況の画像の表示要求が確認された場合に、上記情報送受信手段で取得した情報を基に上記交差点画像データ格納手段の画像データで上記交差点における車両の交通状況の画像を生成して上記表示手段に表示することを特徴とする請求項2記載の車両情報提示装置。
【請求項4】
上記ドライバの上記交差点における車両の交通状況の画像の表示要求は、予め配設したスイッチがON操作された場合と、車載したドライバの視線注視方向検出手段で検出したドライバが上記表示手段を注視する時間が設定時間以上となった場合の少なくともどちらかの場合に上記表示要求があると判断することを特徴とする請求項3記載の車両情報提示装置。
【請求項5】
上記処理手段は、上記表示手段に上記交差点における車両の交通状況の画像を表示した後、アクセル操作が所定に行われた場合は、上記交差点における車両の交通状況の画像の表示を終了することを特徴とする請求項1乃至請求項4の何れか一つに記載の車両情報提示装置。
【請求項6】
上記処理手段は、上記自車位置検出手段で検出した自車両の位置を上記地図データ格納手段に格納されている地図データにマップマッチングさせて上記表示手段に表示させ、上記交差点における車両の交通状況の画像を表示する際は、該交差点における車両の交通状況の画像は、上記表示している地図データの一部又は全部に換えて表示することを特徴とする請求項1乃至請求項5の何れか一つに記載の車両情報提示装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−103080(P2011−103080A)
【公開日】平成23年5月26日(2011.5.26)
【国際特許分類】
【出願番号】特願2009−258138(P2009−258138)
【出願日】平成21年11月11日(2009.11.11)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
【公開日】平成23年5月26日(2011.5.26)
【国際特許分類】
【出願日】平成21年11月11日(2009.11.11)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
[ Back to top ]