
車両挙動制御装置
【課題】旋回方向が切り替わった際のブレーキ液圧の制御応答性を向上させること。
【解決手段】実際の旋回状態と目標旋回状態との偏差に応じた制動力を所定の制御対象輪WFRに発生させることで車両挙動の安定化制御を行う際、2つのブレーキ液圧の液圧系統の中で制御対象輪WFRの属するものを液圧制御対象に設定して当該液圧系統のマスタカット弁41を閉弁させると共に、他方の液圧系統を非液圧制御対象に設定して当該液圧系統のマスタカット弁42を開弁させ、制御対象輪WFRに前記制動力を発生させる車両挙動制御装置であって、旋回方向の切り替わりが予測された場合、切り替わり後の旋回方向における偏差に応じた制動力を次の制御対象輪WFLに対して発生させる前に、次の制御対象輪WFLの属する今現在は非液圧制御対象の液圧系統のマスタカット弁42を閉弁させると共に、次の制御対象輪WFRに対してブレーキ液圧の予圧を付与すること。
【解決手段】実際の旋回状態と目標旋回状態との偏差に応じた制動力を所定の制御対象輪WFRに発生させることで車両挙動の安定化制御を行う際、2つのブレーキ液圧の液圧系統の中で制御対象輪WFRの属するものを液圧制御対象に設定して当該液圧系統のマスタカット弁41を閉弁させると共に、他方の液圧系統を非液圧制御対象に設定して当該液圧系統のマスタカット弁42を開弁させ、制御対象輪WFRに前記制動力を発生させる車両挙動制御装置であって、旋回方向の切り替わりが予測された場合、切り替わり後の旋回方向における偏差に応じた制動力を次の制御対象輪WFLに対して発生させる前に、次の制御対象輪WFLの属する今現在は非液圧制御対象の液圧系統のマスタカット弁42を閉弁させると共に、次の制御対象輪WFRに対してブレーキ液圧の予圧を付与すること。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、操舵操作時の車両の挙動を制御して走行安定性を高める車両挙動制御装置に関する。
【背景技術】
【0002】
車体には、操舵操作に伴い旋回方向に向けたヨーモーメントが発生する。従来、そのヨーモーメントが過大であると判断された場合に、そのヨーモーメントを軽減させるべく逆方向のヨーモーメントを車体に作用させて走行安定性を高める車両挙動制御装置が知られている。この車両挙動制御装置は、その逆方向のヨーモーメントを前側の旋回外輪に加えた制動力によって発生させる。
【0003】
この種の車両挙動制御装置については、下記の特許文献1−4に開示されている。これら各特許文献1−4の車両挙動制御装置は、右前輪及び左後輪の液圧系統と左前輪及び右後輪の液圧系統からなる制動システムのアクチュエータを備えた車両の挙動を制御するものである。特許文献1の車両挙動制御装置は、一方の液圧系統を制御対象とすると共に、他方の液圧系統を非制御対象とし、その制御対象となる液圧系統のブレーキ液圧を車両状態に基づき制御することによって、マスタシリンダ圧センサを用いずとも車両挙動の安定化制御を実現させる。また、特許文献2の車両挙動制御装置は、一方の液圧系統における一方のホイールシリンダのブレーキ液圧制御中にブレーキペダルが操作された場合、その一方の液圧系統における他方のホイールシリンダの保持弁を前記一方のホイールシリンダの制御状態に応じてデューティ制御することによって、マスタシリンダ圧センサを用いずとも車両挙動の安定化制御中のブレーキペダルの操作時に適切な制動力を発生させる。また、特許文献3の車両挙動制御装置は、各液圧系統の内の一方のホイールシリンダのブレーキ液圧を車両状態と当該車両状態に基づき設定した当該ホイールシリンダの制御目標との比較結果に応じて調整すると共に、ブレーキペダルが操作された場合、車両状態と前記制御目標をブレーキペダルの操作状態に応じて補正して設定した他方のホイールシリンダの制御基準との比較結果に応じて他方のホイールシリンダのブレーキ液圧を調整することによって、マスタシリンダ圧センサを用いずとも車両挙動の安定化制御中のブレーキペダルの操作時に適切な制動力を発生させる。また、特許文献4の車両挙動制御装置は、一方の液圧系統の内の一方のホイールシリンダのブレーキ液圧を車両状態に基づき制御し、ブレーキペダルが操作された場合、その一方のホイールシリンダの制御状態に応じて他方のホイールシリンダのブレーキ液圧を制御することによって、マスタシリンダ圧センサを用いずとも車両挙動の安定化制御中のブレーキペダルの操作時に適切な制動力を発生させる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−035441号公報
【特許文献2】特開2005−035442号公報
【特許文献3】特開2005−035443号公報
【特許文献4】特開2005−035444号公報
【特許文献5】特開2010−064721号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、車両挙動の安定化制御中に逆向きの操舵操作が行われることもあり、そのときには、旋回方向が切り替わることで、これまでとは逆向きのヨーモーメントが車体に発生する。これが為、車両挙動制御装置は、旋回方向切り替わり後のヨーモーメントが過大であれば、これを軽減させるべく、ここでも逆方向のヨーモーメントを前側の旋回外輪の制動力で車体に作用させ、走行安定性を高める。従来の車両挙動制御装置は、その旋回方向が切り替わった際のブレーキ液圧の制御応答性を改善する余地がある。尚、特許文献5には旋回方向切り替わり後の安定化制御と当該安定化制御開始前の新たな前側の旋回外輪に対する予圧制御について開示されているが、その予圧制御は、マスタカット弁を開弁させた状態で実行されている。
【0006】
そこで、本発明は、かかる従来例の有する不都合を改善し、旋回方向が切り替わった際のブレーキ液圧の制御応答性を向上させることが可能な車両挙動制御装置を提供することを、その目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成する為、本発明は、車両の実際の旋回状態と目標旋回状態との偏差に応じた制動力を所定の制御対象輪に発生させることで車両挙動の安定化制御を行う際、2つのブレーキ液圧の液圧系統の中で前記制御対象輪の属するものを液圧制御対象に設定して当該液圧系統のマスタカット弁を閉弁させると共に、他方の液圧系統を非液圧制御対象に設定して当該液圧系統のマスタカット弁を開弁させ、前記液圧制御対象の液圧系統のブレーキ液圧を調圧することで前記制御対象輪に前記制動力を発生させる車両挙動制御装置であって、車両の旋回方向の切り替わりが予測された場合、切り替わり後の旋回方向における実際の旋回状態と目標旋回状態との偏差に応じた制動力を次の制御対象輪に対して発生させる前に、該次の制御対象輪の属する今現在は非液圧制御対象の液圧系統のマスタカット弁を閉弁させると共に、該次の制御対象輪に対してブレーキ液圧の予圧を付与することを特徴としている。
【0008】
ここで、前記車両の旋回方向の切り替わりの予測後、前記予圧の付与の前に運転者によるブレーキ踏み増し操作があった場合、前記非液圧制御対象の液圧系統のマスタカット弁の閉弁開始時間を遅らせてから前記予圧の付与を行うことが望ましい。
【0009】
また、前記車両の旋回方向の切り替わりの予測後、前記予圧の付与の前に運転者によるブレーキ踏み増し操作があった場合、前記予圧を付与する際に、前記非液圧制御対象の液圧系統のマスタカット弁を徐々に閉弁させることが望ましい。
【0010】
また、上記目的を達成する為、本発明は、2つのブレーキ液圧の液圧系統の内の何れか一方に属する所定の制御対象輪に対して制動力を発生させることで車両挙動の安定化制御を行う際、前記制御対象輪の属する液圧系統を液圧制御対象に設定して当該液圧系統のマスタカット弁を閉弁させると共に、他方の液圧系統を非液圧制御対象に設定して当該液圧系統のマスタカット弁を開弁させ、前記液圧制御対象の液圧系統のブレーキ液圧を調圧することで前記制御対象輪に前記制動力を発生させる車両挙動制御装置であって、制御対象輪を前記非液圧制御対象の液圧系統に属している車輪に切り替えるべく、該非液圧制御対象の液圧系統を液圧制御対象に切り替え、且つ、前記液圧制御対象の液圧系統を非液圧制御対象に切り替える際に、該今現在非液圧制御対象に設定されている液圧系統のマスタカット弁を閉弁させると共に、前記次の制御対象輪に対してブレーキ液圧の予圧を付与することを特徴としている。
【0011】
ここで、前記各液圧系統の内、一方は左前輪及び右後輪のブレーキ液圧の調圧が可能であり、他方は右前輪及び左後輪のブレーキ液圧の調圧が可能であることが望ましい。
【発明の効果】
【0012】
本発明に係る車両挙動制御装置は、旋回方向の切り替わりが検知されたときに、新たに制御対象輪となる車輪の属する液圧系統のマスタカット弁を開弁状態から閉弁状態へと制御し、その制御対象輪に対してブレーキ液圧の予圧を付与する。従って、この車両挙動制御装置は、車両挙動の安定化制御の開始と共に、その制御対象輪に対して安定化制御の為の制動力を発生させることができる。つまり、この車両挙動制御装置は、旋回方向の切り替わりに伴い車両挙動の安定化制御が必要となったときに、その安定化制御に要する制動力付与の為のブレーキ液圧の制御応答性を向上させることができる。従って、この車両挙動制御装置は、運転者が切り返し操舵を行ったときにも、応答性の良い車両挙動の安定化制御を実行することができる。
【図面の簡単な説明】
【0013】
【図1】図1は、本発明に係る車両挙動制御装置が適用される車両の一例を示す図である。
【図2】図2は、本発明に係る車両挙動制御装置が車両挙動の安定化制御の際に利用する制動システムの構成を示す図である。
【図3】図3は、切り返し操舵前後の車両の挙動と制御対象輪について説明する図である。
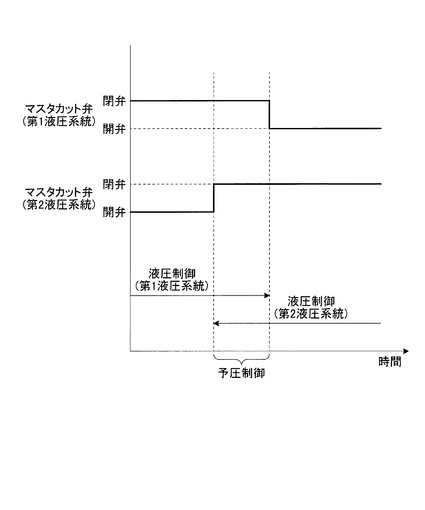
【図4】図4は、通常の予圧制御について説明するタイムチャートである。
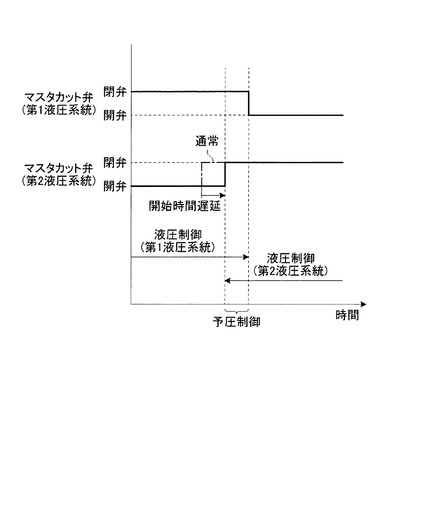
【図5】図5は、開始時間を遅らせた予圧制御について説明するタイムチャートである。
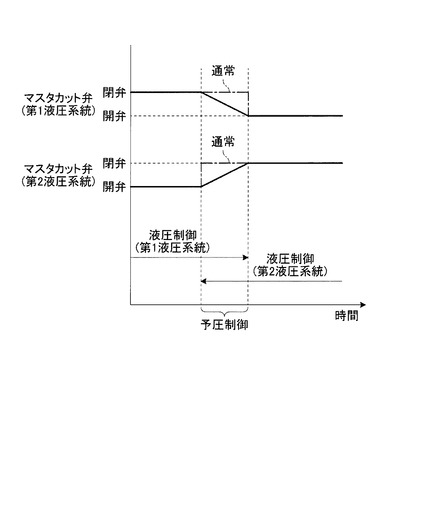
【図6】図6は、マスタカット弁を緩やかに閉弁させる予圧制御について説明するタイムチャートである。
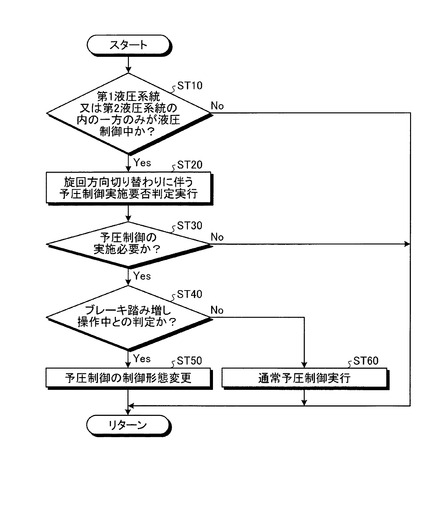
【図7】図7は、本発明に係る車両挙動制御装置の予圧制御の制御動作について説明するフローチャートである。
【図8】図8は、本発明に係る車両挙動制御装置のブレーキ踏み増し操作の判定動作について説明するフローチャートである。
【図9】図9は、ブレーキ踏み増し操作と減速スリップ率との関係について説明する図である。
【発明を実施するための形態】
【0014】
以下に、本発明に係る車両挙動制御装置の実施例を図面に基づいて詳細に説明する。尚、この実施例によりこの発明が限定されるものではない。
【0015】
[実施例]
本発明に係る車両挙動制御装置の実施例を図1から図9に基づいて説明する。
【0016】
本実施例の車両挙動制御装置は、図1に示す電子制御装置(ECU)1の一機能として用意されたものとする。
【0017】
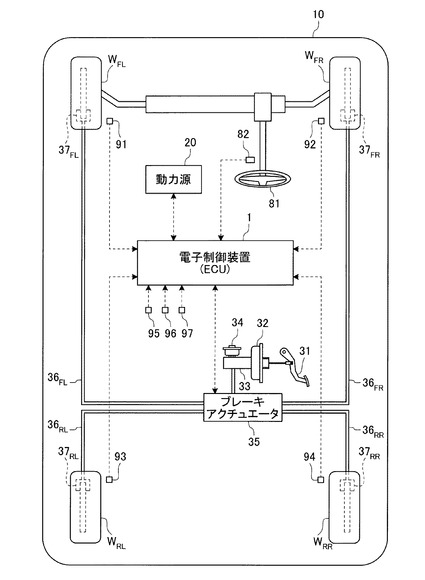
最初に、この車両挙動制御装置が適用される車両10の一例を図1に示す。
【0018】
この車両10には、エンジンやモータ等の動力源20が設けられている。この車両10は、その動力源20の動力を駆動輪に駆動力として伝達して走行する。そして、この車両10には、その走行中の車両10を停止又は減速させる制動システムが用意されている。その制動システムは、夫々の車輪WFL,WFR,WRL,WRRに対して個別の大きさで目標車輪制動トルク(目標車輪制動力)を発生させることができるよう構成されている。ここでは、ブレーキ液圧の力を利用して係合要素間に摩擦力を発生させ、これにより車輪WFL,WFR,WRL,WRRに目標車輪制動トルク(目標車輪制動力)を働かせるものについて例示する。
【0019】
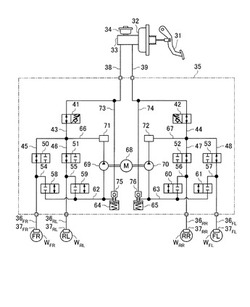
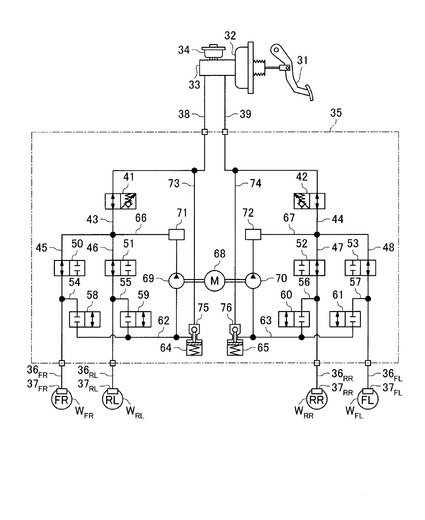
先ず、この制動システムは、図1及び図2に示す如く、運転者が操作するブレーキペダル31と、このブレーキペダル31に入力されたブレーキ操作に伴う操作圧力(ペダル踏力)を所定の倍力比で倍化させる制動倍力装置(ブレーキブースタ)32と、この制動倍力装置32により倍化されたペダル踏力をブレーキペダル31の操作量に応じたブレーキ液圧(以下、「マスタシリンダ圧」という。)へと変換するマスタシリンダ33と、ブレーキ液を貯留するリザーバタンク34と、を備えている。これらブレーキペダル31や制動倍力装置32等は、運転者によるブレーキペダル31の操作量に応じたブレーキ液圧を発生させる液圧発生装置として機能する。
【0020】
また、この制動システムには、マスタシリンダ圧を各車輪WFL,WFR,WRL,WRR毎に調節可能な液圧調節装置(以下、「ブレーキアクチュエータ」という。)35と、このブレーキアクチュエータ35を経たブレーキ液圧(マスタシリンダ圧又はマスタシリンダ圧を調圧したブレーキ液圧)が伝えられる各車輪WFL,WFR,WRL,WRRの液圧配管36FL,36FR,36RL,36RRと、これら各液圧配管36FL,36FR,36RL,36RRのブレーキ液圧が各々供給されて夫々の車輪WFL,WFR,WRL,WRRに車輪制動トルク(車輪制動力)を発生させる制動装置(ディスクロータやキャリパ等で構成されたものやドラムやホイールシリンダ等で構成されたもの)37FL,37FR,37RL,37RRと、が設けられている。
【0021】
本実施例のブレーキアクチュエータ35は、右前輪WFR及び左後輪WRLに対してブレーキ液圧を伝える第1液圧系統と、左前輪WFL及び右後輪WRRに対してブレーキ液圧を伝える第2液圧系統と、を備えたものとして例示する。つまり、このブレーキアクチュエータ35は、所謂X配管のブレーキ液圧回路を有する構造になっている。その第1液圧系統には、マスタシリンダ33の内部の一方の油圧室から第1液圧配管38を介してブレーキ液圧が供給される。一方、第2液圧系統には、マスタシリンダ33の内部の他方の油圧室から第2液圧配管39を介してブレーキ液圧が供給される。
【0022】
このブレーキアクチュエータ35には、第1及び第2の液圧系統における夫々のブレーキ液の流量調節装置としてのマスタカット弁41,42を備えている。マスタカット弁41には第1液圧配管38が接続され、マスタカット弁42には第2液圧配管39が接続される。これら各マスタカット弁41,42は、通常は開弁状態にある所謂常開式の流量調整用電磁弁であって、電子制御装置1の指令による通電に伴って弁開度の制御を実行する。従って、夫々のマスタカット弁41,42は、通電量に応じて弁開度を制御することで、後述する加圧ポンプ69,70から吐出されたブレーキ液の圧力を調節してマスタシリンダ33側へ開放することができる。
【0023】
このブレーキアクチュエータ35においては、第1液圧配管38がマスタカット弁41を介して連結通路43に接続されると共に、第2液圧配管39がマスタカット弁42を介して連結通路44に接続される。そして、第1液圧系統の連結通路43には、そこから分岐させるが如く2本の分岐通路45,46を接続し、第2液圧系統の連結通路44には、そこから分岐させるが如く2本の分岐通路47,48を接続する。第1液圧系統においては、その各々の分岐通路45,46を夫々に右前輪WFRの液圧配管36FRと左後輪WRLの液圧配管36RLに接続する。一方、第2液圧系統においては、その各々の分岐通路47,48を夫々に右後輪WRRの液圧配管36RRと左前輪WFLの液圧配管36FLに接続する。
【0024】
また、その各分岐通路45,46,47,48上には、夫々の制動装置37FL,37FR,37RL,37RR毎のブレーキ液圧を調整可能な液圧調圧部が車輪WFL,WFR,WRL,WRR毎に配設されている。その夫々の液圧調圧部は、車輪WFL,WFR,WRL,WRR毎に用意された保持弁50,51,52,53と液圧排出通路54,55,56,57と減圧弁58,59,60,61とで構成される。ここでは、各分岐通路45,46,47,48上に保持弁50,51,52,53が各々配備されており、更に、これら各保持弁50,51,52,53よりも下流側に液圧排出通路54,55,56,57が夫々に分岐通路45,46,47,48から分岐させるが如く接続されている。そして、その各液圧排出通路54,55,56,57上には、夫々に減圧弁58,59,60,61が配備されている。尚、ここで云う下流とは、ブレーキペダル操作時のブレーキ液の流動方向(つまり、制動装置37FL,37FR,37RL,37RRへと向かう方向)における下流側のことを表す。
【0025】
保持弁50,51,52,53は、所謂常開式の電磁弁であって、非励磁状態の通常時には開弁状態にあり、電子制御装置1の指令による通電に伴って励磁状態となり閉弁させられるものである。一方、減圧弁58,59,60,61は、所謂常閉式の電磁弁であって、非励磁状態の通常時には閉弁状態にあり、電子制御装置1の指令による通電に伴って励磁状態となり開弁させられるものである。
【0026】
また、このブレーキアクチュエータ35には、第1液圧系統の夫々の液圧排出通路54,55を一纏めにする液圧排出集合通路62と、第2液圧系統の夫々の液圧排出通路56,57を一纏めにする液圧排出集合通路63と、が用意されており、その夫々の液圧排出集合通路62,63が各々補助リザーバ64,65に接続されている。
【0027】
更に、第1液圧系統においては、連結通路43と各分岐通路45,46との分岐点から分岐して液圧排出集合通路62に接続されるポンプ通路66を配設する。これと同様に、第2液圧系統には、連結通路44と各分岐通路47,48との分岐点から分岐して液圧排出集合通路63に接続されるポンプ通路67を配設する。
【0028】
その夫々のポンプ通路66,67には、電動機(ここでは1つの電動機68)によって駆動される加圧ポンプ(加圧部)69,70を各々配備している。これら各加圧ポンプ69,70は、夫々にマスタカット弁41,42側の各分岐点に向けてブレーキ液を吐出させるものであり、夫々に分岐通路45,46と分岐通路47,48に対して加圧されたブレーキ液圧を供給する。つまり、第1液圧系統の加圧ポンプ69は、右前輪WFRと左後輪WRLに発生させる制動力を増大させるべく、夫々の制動装置37FR,37RLに供給するブレーキ液圧の増圧を行う。一方、第2液圧系統の加圧ポンプ70は、左前輪WFLと右後輪WRRに発生させる制動力を増大させるべく、夫々の制動装置37FL,37RRに供給するブレーキ液圧の増圧を行う。尚、電動機68は、図示しないバッテリからの電力供給により駆動する。また、その各ポンプ通路66,67には、加圧ポンプ69,70から吐出された夫々のブレーキ液の脈動を回避するダンパ室71,72が配設されている。
【0029】
また、このブレーキアクチュエータ35には、第1及び第2の液圧配管38,39から各々分岐して補助リザーバ64,65に夫々接続される吸入通路73,74が配設されており、更に、その夫々の吸入通路73,74の補助リザーバ64,65側にリザーバカット逆止弁75,76が配設されている。
【0030】
この制動システムには、制御対象輪の制動力を増加させる増圧モード、制御対象輪の制動力をそのときの大きさのまま保持する保持モード、制御対象輪の制動力を減少させる減圧モードがある。制御対象輪を増圧モード、保持モード又は減圧モードに制御する際、電子制御装置1は、その制御対象輪を含む液圧系統のマスタカット弁41,42を閉弁させる。
【0031】
制御対象輪が第1液圧系統に含まれているときには、マスタカット弁41を閉弁して、第1液圧配管38と保持弁50,51の上流の連結通路43とを遮断する。そして、例えば右前輪WFRが制御対象輪の場合、電子制御装置1は、増圧モードへと制御する際に、保持弁50が開弁状態で且つ減圧弁58が閉弁状態となるよう制御することで、右前輪WFRの制動装置37FRへのブレーキ液圧を増加させる。また、電子制御装置1は、保持モードへと制御する際に、保持弁50と減圧弁58が閉弁状態となるよう制御することで、右前輪WFRの制動装置37FRへのブレーキ液圧をそのときの大きさのまま保持させる。また、電子制御装置1は、減圧モードへと制御する際に、保持弁50が閉弁状態で且つ減圧弁58が開弁状態となるよう制御することで、右前輪WFRの制動装置37FRへのブレーキ液圧を減少させる。
【0032】
これと同様に、制御対象輪が第2液圧系統に含まれているときには、マスタカット弁42を閉弁して、第2液圧配管39と保持弁52,53の上流の連結通路44とを遮断する。そして、例えば左前輪WFLが制御対象輪の場合、電子制御装置1は、増圧モードへと制御する際に、保持弁53が開弁状態で且つ減圧弁61が閉弁状態となるよう制御することで、左前輪WFLの制動装置37FLへのブレーキ液圧を増加させる。また、電子制御装置1は、保持モードへと制御する際に、保持弁53と減圧弁61が閉弁状態となるよう制御することで、左前輪WFLの制動装置37FLへのブレーキ液圧をそのときの大きさのまま保持させる。また、電子制御装置1は、減圧モードへと制御する際に、保持弁53が閉弁状態で且つ減圧弁61が開弁状態となるよう制御することで、左前輪WFLの制動装置37FLへのブレーキ液圧を減少させる。
【0033】
車両挙動制御装置は、旋回中の車両挙動の安定化制御を行う。その安定化制御とは、所謂ビークルスタビリティ制御のことである。車両10は、運転者のステアリングホイール81の操舵操作に伴う旋回動作の最中に、その挙動がニュートラルステア傾向を示すこともあれば、オーバーステア傾向やアンダーステア傾向を示すことがある。電子制御装置1は、車速、車両前後加速度や車両横加速度、ヨーレート等の車両走行情報に基づいて、車両10の挙動を判断する。尚、車速は、例えば車輪WFL,WFR,WRL,WRRの車輪速度(車輪速度センサ91,92,93,94で検出)や図示しない変速機の出力軸の回転速度等から推定すればよい。また、車両前後加速度は、車両前後加速度センサ95に検出させ、車両横加速度は車両横加速度センサ96に検出させればよい。また、ヨーレートは、ヨーレートセンサ97に検出させればよい。
【0034】
電子制御装置1は、車体の実際の旋回状態が過大なオーバーステア傾向を示すときに、前側の旋回外輪が増圧モードとなるようにブレーキアクチュエータ35を制御し、その旋回外輪に対して目標旋回状態(例えばニュートラルステア傾向又は弱アンダーステア傾向)に近づける為の所定の大きさの制動力を発生させる。その制動力は、実際の旋回状態と目標旋回状態との偏差に応じて決まる。これにより、オーバーステア傾向を示すヨーモーメントとは逆向きのヨーモーメントが働くので、車体は、目標旋回状態を保ったまま旋回動作を行うことができる。また、この電子制御装置1は、車体の実際の旋回状態が過大なアンダーステア傾向(弱アンダーステアよりも強いアンダーステア)を示すときに、動力源20の出力を減少させると共に、後ろ側の旋回内輪が増圧モードとなるようにブレーキアクチュエータ35を制御し、その旋回内輪に対して目標旋回状態に近づける為の所定の大きさの制動力を発生させる。その制動力についても、実際の旋回状態と目標旋回状態との偏差に応じて決まる。これにより、アンダーステア傾向を示すヨーモーメントとは逆向きのヨーモーメントが働くので、車体は、目標旋回状態を保ったまま旋回動作を行うことができる。
【0035】
この車両挙動の安定化制御の実行中には、一輪だけがブレーキ液圧の増圧制御の対象になるので、この制御対象輪を含む液圧系統のみを液圧制御すればよい。従って、電子制御装置1は、車両挙動の安定化制御を行う際に、第1液圧系統又は第2液圧系統の内で制御対象輪を含むもののみを液圧制御対象とし、他の液圧系統を液圧制御が行われないように非液圧制御対象とする。この電子制御装置1は、車両挙動の安定化制御を行う際に、液圧制御対象となる液圧系統のマスタカット弁41(42)を閉弁させると共に、非液圧制御対象となる液圧系統のマスタカット弁42(41)を開弁させたままにする。
【0036】
ところで、運転者は、この車両挙動の安定化制御の実行中に、ステアリングホイール81を今とは逆向きに操舵操作する(所謂切り返し操舵を行う)ことがある。例えば、運転者は、車体のオーバーステア傾向を感じ取ったときに、ステアリングホイール81を今とは逆向きに操舵操作して、所謂カウンターステアをあてることがある。また、運転者は、今とは逆の旋回方向のコーナへと進入するときに、ステアリングホイール81を今とは逆向きに操舵操作する。電子制御装置1は、その切り返し操舵によって車両10の旋回方向が切り替わり、車体の実際の旋回状態が過大なオーバーステア傾向又は過大なアンダーステア傾向を示すときに、これまでとは逆の液圧系統に含まれる車輪を制御対象輪とする。従って、この電子制御装置1は、これまで非液圧制御対象であった新たに液圧制御対象となる液圧系統のマスタカット弁42(41)を閉弁させると共に、これまで液圧制御対象であった新たに非液圧制御対象となる液圧系統のマスタカット弁41(42)を開弁させる。
【0037】
その際、車体の実際の旋回状態が過大なオーバーステア傾向を示すまで待ってから(つまり新たな旋回方向における車両挙動の安定化制御の開始時になってから)夫々のマスタカット弁41,42の開閉状態の切り替えを行い、新たな制御対象輪を増圧モードに切り替えると、車両10においては、新たな制御対象輪への制動力の付与が遅れ、安定化制御にも遅れが生じてしまう可能性がある。これが為、電子制御装置1には、車両10の旋回方向が逆向きに切り替わるのか否か予測判定させ、旋回方向の切り替わりが起こることを推定できた場合、新たな旋回方向での車両挙動の安定化制御が実際に開始される前に、新たな制御対象輪に対してブレーキ液圧の予圧を付与しておく。
【0038】
その予測判定は、例えばステアリングホイール81の操舵操作方向の切り替わりを観て行えばよい。その操舵操作方向の切り替わりは、操舵角度センサ82から検出したステアリングホイール81の操舵角度の情報から把握できる。操舵角度センサ82は、例えば、ステアリングホイール81が中立位置(ステアリングセンタ)から反時計回り(左旋回方向)に操舵操作されたときに正の値の操舵角度を検出し、ステアリングセンタから時計回りに操舵操作されたときに負の値の操舵角度を検出する。従って、電子制御装置1は、その操舵角度(検出信号)の正又は負の情報を観ることで運転者による切り返し操舵を把握できるので、正から負に又は負から正に変わったときに、車両10の旋回方向が逆向きに切り替わるとの推定を行うことができる。
【0039】
予圧制御は、新たな制御対象輪が含まれる液圧系統、つまり非液圧制御対象から新たに液圧制御対象となる液圧系統のマスタカット弁42(41)を閉弁させ、その新たな制御対象輪を増圧モードへと制御することで行う。その際、新たな制御対象輪に付与する予圧は、この技術分野にて従来から周知の大きさに設定すればよく、例えば新たな制御対象輪に実際に制動力が作用する手前のブレーキ液圧等が考えられる。この予圧制御は、例えば車両10の旋回方向が逆向きに切り替わると予測判定されたときを開始時間に設定すればよい。これにより、新たな旋回方向での車両挙動の安定化制御を実際に開始する際に、新たな制御対象輪に対して応答良く制動力が加わることになるので、その安定化制御の応答遅れを軽減させることができる。
【0040】
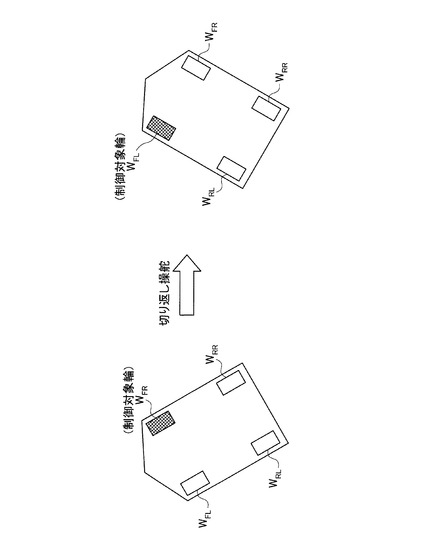
例えば、図3の左図に示すように、左旋回時に車体の実際の旋回状態が過大なオーバーステア傾向を示すときには、右前輪WFRが増圧モードへの制御対象輪になる。これが為、このときの電子制御装置1は、その右前輪WFRが含まれる第1液圧系統のマスタカット弁41を閉弁させると共に、非液圧制御対象となる第2液圧系統のマスタカット弁42を開弁させる(図4)。そして、この電子制御装置1は、その右前輪WFRを増圧モードに制御して、所定の大きさの制動力を付与し、過大なオーバーステア傾向が抑えられるようにする。また、この車両挙動の安定化制御中に今とは逆向きの操舵操作が行われた場合、電子制御装置1は、車両10が右旋回方向に切り替わると推定し、次に液圧制御対象となる第2液圧系統のマスタカット弁42を開弁状態から閉弁状態に切り替え(図4)、新たな制御対象輪である左前輪WFLを増圧モードにして予圧を付与しておく。そして、この電子制御装置1は、図3の右図に示すように右旋回となり車体の実際の旋回状態が過大なオーバーステア傾向を示したときに、これまで液圧制御対象であった第1液圧系統のマスタカット弁41を開弁させると共に、新たな制御対象輪である左前輪WFLへのブレーキ液圧を増圧させる。その予圧制御により、左前輪WFLには、安定化制御の為のブレーキ液圧の増圧と共に制動力が発生する。これにより、車両10においては、その左前輪WFLに対して応答良く所定の大きさの制動力が付与されるので、右旋回時の過大なオーバーステア傾向を応答良く抑えることができる。従って、この車両挙動制御装置は、旋回方向が切り替わった際の車両挙動の安定化制御におけるブレーキ液圧の制御応答性を向上させることができる。
【0041】
ここで、運転者によるブレーキペダル31の操作が行われている状態で予圧制御が開始され、その予圧制御中に運転者が操作中のブレーキペダル31を踏み増し操作した場合、その運転者は、実際の踏み込み操作量が意図しているよりも少なく、そのペダル操作に固さや重さ、つまり所謂板ブレーキ感を覚えることがある。何故ならば、予圧制御中には、マスタカット弁41,42が双方とも閉弁されており、マスタシリンダ33側の第1液圧配管38と保持弁50,51の上流の連結通路43との間、マスタシリンダ33側の第2液圧配管39と保持弁52,53の上流の連結通路44との間のブレーキ液の流動が遮断されているからである。
【0042】
そこで、この車両挙動制御装置には、運転者によるブレーキ操作(ブレーキ踏み増し操作又はブレーキ解除側への操作)の最中に第1及び第2の液圧系統のマスタカット弁41,42が両方とも閉弁されると把握した場合、そのマスタカット弁41,42を両方とも閉弁させる前までに運転者によるブレーキ踏み増し操作が検知されたならば、運転者に板ブレーキ感を覚えさせない又は運転者の感じる板ブレーキ感を緩和させるように、両方のマスタカット弁41,42の閉弁制御の制御形態を通常時に対して変更させる。尚、その通常時とは、板ブレーキ感を抑制する必要が無いときの両方のマスタカット弁41,42の閉弁制御時のことである。
【0043】
そのマスタカット弁41,42が両方とも閉弁される可能性のある状況とは、車両挙動の安定化制御における予圧制御の開始条件が成立したときである。但し、その安定化制御での液圧制御だけに限らず、これ以外の制御において両方のマスタカット弁41,42が閉弁される可能性のあるときについても該当する。従って、開弁状態の両方のマスタカット弁41,42をブレーキ操作の最中に双方とも閉弁させるときについても、マスタカット弁41,42が両方とも閉弁される可能性のある状況に該当する。
【0044】
また、ここで例示している制動システムにおいては、マスタシリンダ圧の検出を行うマスタシリンダ圧センサが用意されていない。これが為、車両挙動制御装置は、マスタシリンダ圧の変化から運転者によるブレーキ操作を把握することができない。ここで、両方のマスタカット弁41,42が閉弁されるまでは、その内の少なくとも一方が開弁状態になっている。このことから、運転者がブレーキ踏み増し操作を行ったときは、その開弁状態のマスタカット弁41,42の属する液圧系統の車輪に対してのブレーキ液圧が増加し、その車輪のスリップ率が減速側に変化する。従って、ここでは、その車輪のスリップ率に基づいて、運転者によるブレーキ踏み増し操作が行われたのか否かを把握させる。
【0045】
板ブレーキ感を抑制し、その板ブレーキ感を覚えさせない又は緩和させる為には、運転者によるブレーキ踏み増し操作の最中に両方のマスタカット弁41,42を閉弁させないことである。これが為、この車両挙動制御装置には、両方のマスタカット弁41,42が閉弁状態となる閉弁制御の開始時間を通常時よりも遅らせればよい。また、この車両挙動制御装置には、その通常時と同じ開始時間で又はその開始時間を通常時よりも遅らせた上で、開弁状態のマスタカット弁41,42を通常時よりも緩やかに閉弁させていってもよい。
【0046】
ここでは、車両挙動の安定化制御中の動作を例に挙げて説明する。従って、車両挙動制御装置には、運転者によるブレーキ操作の最中に予圧制御が実行されると把握した場合、その予圧制御が開始される前までに運転者によるブレーキ踏み増し操作が検知されたならば、運転者に板ブレーキ感を覚えさせない又は運転者の感じる板ブレーキ感を緩和させるように、予圧制御の制御形態を通常の予圧制御に対して変更させる。通常の予圧制御とは、その板ブレーキ感を抑制する為に行われる予圧制御以外の制御形態で実行されるもののことを云う。
【0047】
この例示では、ステアリングホイール81の操舵操作方向が逆向きに切り替わったときに、旋回方向の切り替わり後に予圧制御が実行されると予測判定させる。また、この例示では、非液圧制御対象の液圧系統に属する車輪のスリップ率に基づいて、運転者によるブレーキ踏み増し操作が行われたのか否かを把握させる。
【0048】
また、この例示では、両方のマスタカット弁41,42を閉弁状態にする為の閉弁制御の開始時間を遅らせて、これにより板ブレーキ感を抑制するのであれば、予圧制御の開始時間そのものを遅らせる(図5)。例えば、その開始時間は、運転者によるブレーキ踏み増し操作が終わってからに設定してもよい。これにより、運転者は、その後で予圧制御が実行されたときに板ブレーキ感を覚えずともすむ。しかしながら、運転者は、必ずしも旋回方向切り替わり後の車両挙動の安定化制御(予圧制御終了後のブレーキ液圧の増圧制御)が開始されるまでにブレーキ踏み増し操作を終えているとは限らない。また、ブレーキ踏み増し操作の終了の検知時からその安定化制御の開始時までの時間が短すぎた場合、次の制御対象輪に対して所望の予圧を付与できない可能性がある。そこで、遅らせる開始時間は、次の制御対象輪に対して所望の予圧が付与できる範囲内で設定してもよい。
【0049】
これらを勘案して、車両挙動制御装置には、そのような所望の予圧の付与が可能な開始時間(以下、「最遅延開始時間」という。)までにブレーキ踏み増し操作の終了を検知すれば、その検知後、その最遅延開始時間までの間に予圧制御の開始時間を設定させればよい。これにより、運転者が板ブレーキ感を覚えずにブレーキ踏み増し操作でき、且つ、次の制御対象輪に対する所望の予圧制御も実行することができる。一方、この車両挙動制御装置には、最遅延開始時間までにブレーキ踏み増し操作の終了が検知されなければ、その最遅延開始時間を予圧制御の開始時間として設定させればよい。これにより、少なくとも予圧制御が開始されるまで運転者に板ブレーキ感を覚えさせず、その開始後には次の制御対象輪に対する所望の予圧制御を行うことができる。
【0050】
ここで、前述したように、開弁状態のマスタカット弁41,42を通常時よりも緩やかに閉弁させていくことも可能である。この例示に当て嵌める場合には、予圧制御において閉弁制御の対象となる一方のマスタカット弁41(42)を通常の予圧制御時よりも緩やかに閉弁させていく(図6)。この緩勾配による閉弁制御の開始時間は、上記に例示した予圧制御の開始時間の内の何れかに設定すればよい。また、この緩勾配による閉弁制御を行う際には、遅くとも車両挙動の安定化制御の開始時(予圧制御終了時)までに、そのマスタカット弁41(42)の閉弁動作を終わらせることが好ましい。更に、この予圧制御においては、マスタカット弁41(42)の閉弁動作と共に、次の制御対象輪の保持弁50(53)及び減圧弁58(61)を制御して徐々に増圧モードに切り替えていってもよい。このときには、現在の制御対象輪の属する液圧系統のマスタカット弁42(41)を徐々に開弁させていくと共に(図6)、その制御対象輪の保持弁53(50)及び減圧弁61(58)を制御して徐々に減圧モードに切り替えてもよい。
【0051】
この緩勾配によるマスタカット弁41(42)の閉弁制御は、上述した最遅延開始時間までにブレーキ踏み増し操作の終了が検知されなかったときに実行することが好ましい。何故ならば、これにより、板ブレーキ感が徐々に増していくことになるので、そのマスタカット弁41(42)を一気に閉弁させるよりも予圧制御が開始されてからの板ブレーキ感を緩和させることができるからである。また、これにより、運転者が板ブレーキ感を感じ取る時間を短縮できるからである。
【0052】
以下、この車両挙動制御装置の演算処理動作の一例について図7のフローチャートに基づき説明する。
【0053】
前述したように、車両挙動の安定化制御中には、第1液圧系統又は第2液圧系統の内の何れか一方のみが液圧制御中になっており、車体がオーバーステア傾向を示していれば前側の旋回外輪に、アンダーステア傾向を示していれば後ろ側の旋回内輪に所定の制動力を発生させる。従って、電子制御装置1は、先ず第1液圧系統又は第2液圧系統の内の何れか一方のみが液圧制御中になっているのか否かの判定を行う(ステップST10)。尚、このステップST10においては、その安定化制御以外の制御であっても、一方の液圧系統だけでの液圧制御を実行している場合があれば、肯定判定が行われる。
【0054】
電子制御装置1は、第1液圧系統と第2液圧系統の双方で液圧制御を行っている又は液圧制御自体が行われていないと判定すると、この演算処理動作を一旦終了させる。
【0055】
一方、この電子制御装置1は、第1液圧系統又は第2液圧系統の内の何れか一方のみが液圧制御中であるとの判定を行った場合、旋回方向の切り替わりに伴う予圧制御の実施要否判定を実行する(ステップST20)。このステップST20においては、運転者によるステアリングホイール81の操舵操作方向が逆向きになったことを検知して、旋回方向の切り替わりが起こると予測判定されたときに、予圧制御の実施が必要であるとの判定を行う。また、このステップST20においては、そのような予測判定が為されなかったときに、予圧制御の実施が不要であるとの判定を行う。
【0056】
電子制御装置1は、このステップST20の判定結果について、予圧制御の実施が必要とされているのか否かを観る(ステップST30)。この電子制御装置1は、予圧制御の実施が不要であれば、この演算処理動作を一旦終わらせる。これに対して、電子制御装置1は、予圧制御の実施が必要であれば、運転者によるブレーキ踏み増し操作中との判定が為されているのか否かを観る(ステップST40)。
【0057】
運転者によるブレーキ踏み増し操作中であるのか否かの判定については、これまでの図7の演算処理動作の流れの中の何れかの工程で実行してもよく、この演算処理動作と平行に実行してもよい。ここでは、後者の場合を例に挙げて、下記に図8のフローチャートを用いて説明する。
【0058】
車輪のスリップ率Sは、車速Vと車輪速度Vwとから演算される。このスリップ率Sの演算式を下記の式1の如く設定すると、正の値を示すときには、減速側のスリップ率(以下、「減速スリップ率」という。)になり、負の値を示すときには、加速側のスリップ率(以下、「加速スリップ率」という。)になる。
【0059】
S={(V−Vw)/V}*100 … (1)
【0060】
車両挙動の安定化制御中には、車両10が減速することになり、車輪のスリップ率S(n)が減速側になる。その際、ブレーキ操作が行われていないときには、安定化制御の制御対象輪の減速スリップ率Sが他の車輪の減速スリップ率Sよりも減速側に大きくなっている。そして、この状態でブレーキ操作が行われると、制御対象輪の減速スリップ率Sにブレーキ操作に伴う影響は現れないが、今時点で非液圧制御対象の液圧系統に属する車輪(以下、「非制御対象輪」という。)については、減速スリップ率Sが減速側に大きくなっていく(図9)。電子制御装置1は、この非制御対象輪の減速スリップ率Sの変化を監視して、運転者によるブレーキ踏み増し操作が行われているのか否かを判定する。
【0061】
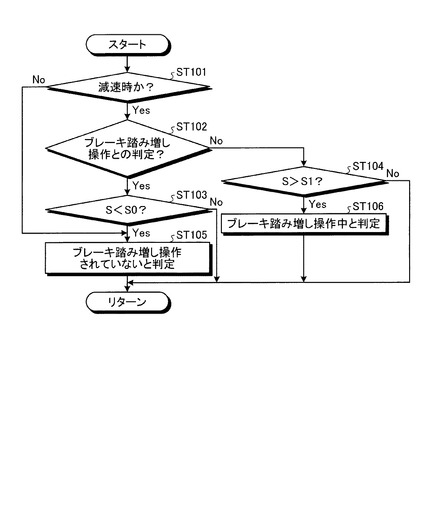
先ず、電子制御装置1は、車両10が減速しているのか否かを判定する(ステップST101)。この判定は、例えば、車速や車両前後加速度等の車両走行情報に基づいて行う。減速時でなければ、ブレーキ踏み増し操作が行われていないと判断できるので、電子制御装置1は、後述するステップST105に進んでブレーキ踏み増し操作されていないと判定する。
【0062】
一方、電子制御装置1は、減速時であれば、現時点で運転者によるブレーキ踏み増し操作が行われているとの判定が為されているのか否かを観る(ステップST102)。
【0063】
ブレーキ踏み増し操作が行われていると判定されていれば、この電子制御装置1は、非制御対象輪の減速スリップ率Sが所定の判定解除閾値S0よりも小さくなっているのか否かを判定する(ステップST103)。一方、ブレーキ踏み増し操作が行われていないと判定されていれば、この電子制御装置1は、非制御対象輪の減速スリップ率Sが所定の判定閾値S1よりも大きくなっているのか否かを判定する(ステップST104)。
【0064】
ここで、車両挙動の安定化制御中には、ブレーキ操作が行われていなくても、非制御対象輪のスリップ率Sが減速側になっている。これが為、この安定化制御中の車両10においては、非制御対象輪において減速スリップ率Sが演算されたからといって、必ずしも運転者がブレーキ操作を行っているとは限らない。
【0065】
そこで、例えば、非制御対象輪の減速スリップ率Sについて、ブレーキ操作未実施の安定化制御中の値を実験やシミュレーションで求めると共に、ブレーキ操作されているときの安定化制御中の値を実験やシミュレーションで求め、これらの境界に相当する値を予め把握する。ここでは、例えば、その境界に相当する減速スリップ率S又はこの減速スリップ率Sについてスリップ率演算誤差等を鑑みて補正した値を判定解除閾値S0に設定する。また、この判定解除閾値S0をそのまま判定閾値S1に設定してもよいが、ここでは、この判定解除閾値S0よりも大きい値を判定閾値S1に設定する。これは、判定閾値S1を判定解除閾値S0と同じ値に設定すると、例えば、ブレーキ操作していないにも拘わらず、路面摩擦係数の変化や悪路走行等で減速スリップ率Sが判定解除閾値S0を超えてしまい、その誤判定によっても予圧制御の制御形態を変更してしまう可能性があるからである。故に、判定解除閾値S0に対する増加代は、そのような変則的な事態を推察し、その推察結果に基づいて決めればよい。尚、全ての変則的な事態に対応することは難しく、その増加代を大きくし過ぎると、板ブレーキ感の抑制という効果が薄れてしまうこともある。これが為、判定閾値S1は、例えば変則的な事態の起こる頻度を鑑みて、その頻度が多いものにのみ対応させるべく増加代を決めることが好ましい。
【0066】
電子制御装置1は、ステップST103で減速スリップ率Sが判定解除閾値S0よりも小さくないと判定した場合、未だ運転者によるブレーキ踏み増し操作が行われていると判断してステップST101に戻る。一方、そのステップST103で減速スリップ率Sが判定解除閾値S0よりも小さくなったと判定した場合、この電子制御装置1は、運転者によるブレーキ踏み増し操作が行われていないと判定する(ステップST105)。電子制御装置1は、ステップST101に戻り、同様の演算処理を繰り返す。
【0067】
また、電子制御装置1は、ステップST104で減速スリップ率Sが判定閾値S1よりも大きくなっていないと判定した場合、運転者によるブレーキ踏み増し操作が行われていないと判断してステップST101に戻る。一方、そのステップST104で減速スリップ率Sが判定閾値S1よりも大きくなったと判定した場合、この電子制御装置1は、運転者によるブレーキ踏み増し操作が行われたと判定する(ステップST106)。電子制御装置1は、ステップST101に戻り、同様の演算処理を繰り返す。
【0068】
電子制御装置1は、ステップST40において、この図8による判定結果を利用する。その図8の演算処理動作は繰り返されているので、ステップST40においては、最新の判定結果を用いて判断させる。
【0069】
電子制御装置1は、運転者によるブレーキ踏み増し操作中との判定が為されていれば、予圧制御の制御形態を通常の予圧制御に対して変更する(ステップST50)。一方、この電子制御装置1は、運転者によるブレーキ踏み増し操作中との判定が為されていなければ、通常の予圧制御を実行する(ステップST60)。
【0070】
このように、この車両挙動制御装置は、旋回方向の切り替わりが検知されたときに、新たに制御対象輪となる車輪の属する液圧系統のマスタカット弁41(42)を開弁状態から閉弁状態へと制御し、その制御対象輪に対してブレーキ液圧の予圧を付与する。従って、この車両挙動制御装置は、車両挙動の安定化制御の開始と共に、その制御対象輪に対して安定化制御の為の制動力を発生させることができる。つまり、この車両挙動制御装置は、旋回方向の切り替わりに伴い車両挙動の安定化制御が必要となったときに、その安定化制御に要する制動力付与の為のブレーキ液圧の制御応答性を向上させることができる。従って、この車両挙動制御装置は、運転者が切り返し操舵を行ったときにも、応答性の良い車両挙動の安定化制御を実行することができる。
【0071】
また、この車両挙動制御装置は、その非液圧制御対象の液圧系統における予圧制御の開始前までに運転者によるブレーキ踏み増し操作が行われたときに、予圧制御の制御形態を通常の予圧制御に対して変更する。その変更の際には、その非液圧制御対象の液圧系統におけるマスタカット弁41(42)の閉弁制御の開始時間を通常よりも遅らせることにより、予圧制御が開始されるまではマスタカット弁41(42)の上下流間のブレーキ液の流動が可能になる。従って、この車両挙動制御装置は、予圧制御が実行されても運転者に板ブレーキ感を覚えさせない。また、その変更の際には、その液圧系統におけるマスタカット弁41(42)を通常よりもゆっくりと閉弁させることで、予圧制御が開始されたとしても、マスタカット弁41(42)の上下流間のブレーキ液の流動量が徐々に制限されていく、従って、この車両挙動制御装置は、予圧制御が実行されても運転者の感じ取る板ブレーキ感を緩和させることができる。
【0072】
ここで、この実施例においては、運転者のブレーキ踏み増し操作の判定について、非液圧制御対象の液圧系統に属する車輪の減速スリップ率Sの変化を監視することで行っている。しかしながら、例えば、走行中の路面摩擦係数が低くなったとき、悪路を走行しているとき等の路面変化によって、誤判定となる可能性がある。この為、前述したように、判定解除閾値S0に対する判定閾値S1の増加代の設定することで、誤った判定が為される可能性を低減すればよい。但し、これを以てしても、誤判定となる可能性が必ずしも無くなるとは云い難い。従って、運転者のブレーキ踏み増し操作の判定については、その減速スリップ率Sの変化の監視と共に、車両前後加速度の変化や車速の変化を観てから結論を出すことが望ましい。例えば、下記のように判定を行う。尚、ここでは、便宜上、前述した減速スリップ率Sの変化に基づき行われたブレーキ踏み増し操作されているとの判定を仮判定とする。
【0073】
[減速スリップ率Sの変化と車両前後加速度の変化の監視]
車両前後加速度が減速方向へと変化したときには、運転者によるブレーキ踏み増し操作が行われているとの仮判定が可能である。従って、電子制御装置1には、減速スリップ率Sの変化と車両前後加速度の変化の双方においてブレーキ踏み増し操作中との仮判定が為されている場合、運転者によるブレーキ踏み増し操作が行われているとの最終的な判定を実行させる。一方、この電子制御装置1には、減速スリップ率Sの変化と車両前後加速度の変化の内の何れかにおいてブレーキ踏み増し操作中ではないとの仮判定が為されている場合、運転者によるブレーキ踏み増し操作が行われていないとの最終的な判定を実行させる。
【0074】
[減速スリップ率Sの変化と車速の変化の監視]
車速が減速方向へと変化したときには、運転者によるブレーキ踏み増し操作が行われているとの仮判定が可能である。従って、電子制御装置1には、減速スリップ率Sの変化と車速の変化の双方においてブレーキ踏み増し操作中との仮判定が為されている場合、運転者によるブレーキ踏み増し操作が行われているとの最終的な判定を実行させる。一方、この電子制御装置1には、減速スリップ率Sの変化と車速の変化の内の何れかにおいてブレーキ踏み増し操作中ではないとの仮判定が為されている場合、運転者によるブレーキ踏み増し操作が行われていないとの最終的な判定を実行させる。
【0075】
[減速スリップ率Sの変化と車両前後加速度の変化と車速の変化の監視]
この場合、電子制御装置1には、減速スリップ率Sの変化と車両前後加速度の変化と車速の変化の全てにおいてブレーキ踏み増し操作中との仮判定が為されている場合、運転者によるブレーキ踏み増し操作が行われているとの最終的な判定を実行させる。一方、この電子制御装置1には、減速スリップ率Sの変化と車両前後加速度の変化と車速の変化の内の何れかにおいてブレーキ踏み増し操作中ではないとの仮判定が為されている場合、運転者によるブレーキ踏み増し操作が行われていないとの最終的な判定を実行させる。
【0076】
また、この実施例においては、マスタシリンダ圧センサが設けられていない制動システムを例に挙げた。しかしながら、この車両挙動制御装置は、第1又は第2の液圧配管38,39の内の何れか一方にマスタシリンダ圧センサが配設された車両10についても上記の如き制御の対象にしてもよい。これにより、例えば、経年変化等によりマスタシリンダ圧センサの検出精度が落ちた場合でも、この車両挙動制御装置は、その検出結果に拘わらず上述したものと同様の効果を得ることができる。
【産業上の利用可能性】
【0077】
以上のように、本発明に係る車両挙動制御装置は、旋回方向が切り替わった際のブレーキ液圧の制御応答性を向上させる技術に有用である。
【符号の説明】
【0078】
1 電子制御装置
10 車両
31 ブレーキペダル
33 マスタシリンダ
35 ブレーキアクチュエータ
37FL,37FR,37RL,37RR 制動装置
41,42 マスタカット弁
50,51,52,53 保持弁
58,59,60,61 減圧弁
81 ステアリングホイール
82 操舵角度センサ
91,92,93,94 車輪速度センサ
95 車両前後加速度センサ
96 車両横加速度センサ
97 ヨーレートセンサ
WFL,WFR,WRL,WRR 車輪
【技術分野】
【0001】
本発明は、操舵操作時の車両の挙動を制御して走行安定性を高める車両挙動制御装置に関する。
【背景技術】
【0002】
車体には、操舵操作に伴い旋回方向に向けたヨーモーメントが発生する。従来、そのヨーモーメントが過大であると判断された場合に、そのヨーモーメントを軽減させるべく逆方向のヨーモーメントを車体に作用させて走行安定性を高める車両挙動制御装置が知られている。この車両挙動制御装置は、その逆方向のヨーモーメントを前側の旋回外輪に加えた制動力によって発生させる。
【0003】
この種の車両挙動制御装置については、下記の特許文献1−4に開示されている。これら各特許文献1−4の車両挙動制御装置は、右前輪及び左後輪の液圧系統と左前輪及び右後輪の液圧系統からなる制動システムのアクチュエータを備えた車両の挙動を制御するものである。特許文献1の車両挙動制御装置は、一方の液圧系統を制御対象とすると共に、他方の液圧系統を非制御対象とし、その制御対象となる液圧系統のブレーキ液圧を車両状態に基づき制御することによって、マスタシリンダ圧センサを用いずとも車両挙動の安定化制御を実現させる。また、特許文献2の車両挙動制御装置は、一方の液圧系統における一方のホイールシリンダのブレーキ液圧制御中にブレーキペダルが操作された場合、その一方の液圧系統における他方のホイールシリンダの保持弁を前記一方のホイールシリンダの制御状態に応じてデューティ制御することによって、マスタシリンダ圧センサを用いずとも車両挙動の安定化制御中のブレーキペダルの操作時に適切な制動力を発生させる。また、特許文献3の車両挙動制御装置は、各液圧系統の内の一方のホイールシリンダのブレーキ液圧を車両状態と当該車両状態に基づき設定した当該ホイールシリンダの制御目標との比較結果に応じて調整すると共に、ブレーキペダルが操作された場合、車両状態と前記制御目標をブレーキペダルの操作状態に応じて補正して設定した他方のホイールシリンダの制御基準との比較結果に応じて他方のホイールシリンダのブレーキ液圧を調整することによって、マスタシリンダ圧センサを用いずとも車両挙動の安定化制御中のブレーキペダルの操作時に適切な制動力を発生させる。また、特許文献4の車両挙動制御装置は、一方の液圧系統の内の一方のホイールシリンダのブレーキ液圧を車両状態に基づき制御し、ブレーキペダルが操作された場合、その一方のホイールシリンダの制御状態に応じて他方のホイールシリンダのブレーキ液圧を制御することによって、マスタシリンダ圧センサを用いずとも車両挙動の安定化制御中のブレーキペダルの操作時に適切な制動力を発生させる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−035441号公報
【特許文献2】特開2005−035442号公報
【特許文献3】特開2005−035443号公報
【特許文献4】特開2005−035444号公報
【特許文献5】特開2010−064721号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、車両挙動の安定化制御中に逆向きの操舵操作が行われることもあり、そのときには、旋回方向が切り替わることで、これまでとは逆向きのヨーモーメントが車体に発生する。これが為、車両挙動制御装置は、旋回方向切り替わり後のヨーモーメントが過大であれば、これを軽減させるべく、ここでも逆方向のヨーモーメントを前側の旋回外輪の制動力で車体に作用させ、走行安定性を高める。従来の車両挙動制御装置は、その旋回方向が切り替わった際のブレーキ液圧の制御応答性を改善する余地がある。尚、特許文献5には旋回方向切り替わり後の安定化制御と当該安定化制御開始前の新たな前側の旋回外輪に対する予圧制御について開示されているが、その予圧制御は、マスタカット弁を開弁させた状態で実行されている。
【0006】
そこで、本発明は、かかる従来例の有する不都合を改善し、旋回方向が切り替わった際のブレーキ液圧の制御応答性を向上させることが可能な車両挙動制御装置を提供することを、その目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成する為、本発明は、車両の実際の旋回状態と目標旋回状態との偏差に応じた制動力を所定の制御対象輪に発生させることで車両挙動の安定化制御を行う際、2つのブレーキ液圧の液圧系統の中で前記制御対象輪の属するものを液圧制御対象に設定して当該液圧系統のマスタカット弁を閉弁させると共に、他方の液圧系統を非液圧制御対象に設定して当該液圧系統のマスタカット弁を開弁させ、前記液圧制御対象の液圧系統のブレーキ液圧を調圧することで前記制御対象輪に前記制動力を発生させる車両挙動制御装置であって、車両の旋回方向の切り替わりが予測された場合、切り替わり後の旋回方向における実際の旋回状態と目標旋回状態との偏差に応じた制動力を次の制御対象輪に対して発生させる前に、該次の制御対象輪の属する今現在は非液圧制御対象の液圧系統のマスタカット弁を閉弁させると共に、該次の制御対象輪に対してブレーキ液圧の予圧を付与することを特徴としている。
【0008】
ここで、前記車両の旋回方向の切り替わりの予測後、前記予圧の付与の前に運転者によるブレーキ踏み増し操作があった場合、前記非液圧制御対象の液圧系統のマスタカット弁の閉弁開始時間を遅らせてから前記予圧の付与を行うことが望ましい。
【0009】
また、前記車両の旋回方向の切り替わりの予測後、前記予圧の付与の前に運転者によるブレーキ踏み増し操作があった場合、前記予圧を付与する際に、前記非液圧制御対象の液圧系統のマスタカット弁を徐々に閉弁させることが望ましい。
【0010】
また、上記目的を達成する為、本発明は、2つのブレーキ液圧の液圧系統の内の何れか一方に属する所定の制御対象輪に対して制動力を発生させることで車両挙動の安定化制御を行う際、前記制御対象輪の属する液圧系統を液圧制御対象に設定して当該液圧系統のマスタカット弁を閉弁させると共に、他方の液圧系統を非液圧制御対象に設定して当該液圧系統のマスタカット弁を開弁させ、前記液圧制御対象の液圧系統のブレーキ液圧を調圧することで前記制御対象輪に前記制動力を発生させる車両挙動制御装置であって、制御対象輪を前記非液圧制御対象の液圧系統に属している車輪に切り替えるべく、該非液圧制御対象の液圧系統を液圧制御対象に切り替え、且つ、前記液圧制御対象の液圧系統を非液圧制御対象に切り替える際に、該今現在非液圧制御対象に設定されている液圧系統のマスタカット弁を閉弁させると共に、前記次の制御対象輪に対してブレーキ液圧の予圧を付与することを特徴としている。
【0011】
ここで、前記各液圧系統の内、一方は左前輪及び右後輪のブレーキ液圧の調圧が可能であり、他方は右前輪及び左後輪のブレーキ液圧の調圧が可能であることが望ましい。
【発明の効果】
【0012】
本発明に係る車両挙動制御装置は、旋回方向の切り替わりが検知されたときに、新たに制御対象輪となる車輪の属する液圧系統のマスタカット弁を開弁状態から閉弁状態へと制御し、その制御対象輪に対してブレーキ液圧の予圧を付与する。従って、この車両挙動制御装置は、車両挙動の安定化制御の開始と共に、その制御対象輪に対して安定化制御の為の制動力を発生させることができる。つまり、この車両挙動制御装置は、旋回方向の切り替わりに伴い車両挙動の安定化制御が必要となったときに、その安定化制御に要する制動力付与の為のブレーキ液圧の制御応答性を向上させることができる。従って、この車両挙動制御装置は、運転者が切り返し操舵を行ったときにも、応答性の良い車両挙動の安定化制御を実行することができる。
【図面の簡単な説明】
【0013】
【図1】図1は、本発明に係る車両挙動制御装置が適用される車両の一例を示す図である。
【図2】図2は、本発明に係る車両挙動制御装置が車両挙動の安定化制御の際に利用する制動システムの構成を示す図である。
【図3】図3は、切り返し操舵前後の車両の挙動と制御対象輪について説明する図である。
【図4】図4は、通常の予圧制御について説明するタイムチャートである。
【図5】図5は、開始時間を遅らせた予圧制御について説明するタイムチャートである。
【図6】図6は、マスタカット弁を緩やかに閉弁させる予圧制御について説明するタイムチャートである。
【図7】図7は、本発明に係る車両挙動制御装置の予圧制御の制御動作について説明するフローチャートである。
【図8】図8は、本発明に係る車両挙動制御装置のブレーキ踏み増し操作の判定動作について説明するフローチャートである。
【図9】図9は、ブレーキ踏み増し操作と減速スリップ率との関係について説明する図である。
【発明を実施するための形態】
【0014】
以下に、本発明に係る車両挙動制御装置の実施例を図面に基づいて詳細に説明する。尚、この実施例によりこの発明が限定されるものではない。
【0015】
[実施例]
本発明に係る車両挙動制御装置の実施例を図1から図9に基づいて説明する。
【0016】
本実施例の車両挙動制御装置は、図1に示す電子制御装置(ECU)1の一機能として用意されたものとする。
【0017】
最初に、この車両挙動制御装置が適用される車両10の一例を図1に示す。
【0018】
この車両10には、エンジンやモータ等の動力源20が設けられている。この車両10は、その動力源20の動力を駆動輪に駆動力として伝達して走行する。そして、この車両10には、その走行中の車両10を停止又は減速させる制動システムが用意されている。その制動システムは、夫々の車輪WFL,WFR,WRL,WRRに対して個別の大きさで目標車輪制動トルク(目標車輪制動力)を発生させることができるよう構成されている。ここでは、ブレーキ液圧の力を利用して係合要素間に摩擦力を発生させ、これにより車輪WFL,WFR,WRL,WRRに目標車輪制動トルク(目標車輪制動力)を働かせるものについて例示する。
【0019】
先ず、この制動システムは、図1及び図2に示す如く、運転者が操作するブレーキペダル31と、このブレーキペダル31に入力されたブレーキ操作に伴う操作圧力(ペダル踏力)を所定の倍力比で倍化させる制動倍力装置(ブレーキブースタ)32と、この制動倍力装置32により倍化されたペダル踏力をブレーキペダル31の操作量に応じたブレーキ液圧(以下、「マスタシリンダ圧」という。)へと変換するマスタシリンダ33と、ブレーキ液を貯留するリザーバタンク34と、を備えている。これらブレーキペダル31や制動倍力装置32等は、運転者によるブレーキペダル31の操作量に応じたブレーキ液圧を発生させる液圧発生装置として機能する。
【0020】
また、この制動システムには、マスタシリンダ圧を各車輪WFL,WFR,WRL,WRR毎に調節可能な液圧調節装置(以下、「ブレーキアクチュエータ」という。)35と、このブレーキアクチュエータ35を経たブレーキ液圧(マスタシリンダ圧又はマスタシリンダ圧を調圧したブレーキ液圧)が伝えられる各車輪WFL,WFR,WRL,WRRの液圧配管36FL,36FR,36RL,36RRと、これら各液圧配管36FL,36FR,36RL,36RRのブレーキ液圧が各々供給されて夫々の車輪WFL,WFR,WRL,WRRに車輪制動トルク(車輪制動力)を発生させる制動装置(ディスクロータやキャリパ等で構成されたものやドラムやホイールシリンダ等で構成されたもの)37FL,37FR,37RL,37RRと、が設けられている。
【0021】
本実施例のブレーキアクチュエータ35は、右前輪WFR及び左後輪WRLに対してブレーキ液圧を伝える第1液圧系統と、左前輪WFL及び右後輪WRRに対してブレーキ液圧を伝える第2液圧系統と、を備えたものとして例示する。つまり、このブレーキアクチュエータ35は、所謂X配管のブレーキ液圧回路を有する構造になっている。その第1液圧系統には、マスタシリンダ33の内部の一方の油圧室から第1液圧配管38を介してブレーキ液圧が供給される。一方、第2液圧系統には、マスタシリンダ33の内部の他方の油圧室から第2液圧配管39を介してブレーキ液圧が供給される。
【0022】
このブレーキアクチュエータ35には、第1及び第2の液圧系統における夫々のブレーキ液の流量調節装置としてのマスタカット弁41,42を備えている。マスタカット弁41には第1液圧配管38が接続され、マスタカット弁42には第2液圧配管39が接続される。これら各マスタカット弁41,42は、通常は開弁状態にある所謂常開式の流量調整用電磁弁であって、電子制御装置1の指令による通電に伴って弁開度の制御を実行する。従って、夫々のマスタカット弁41,42は、通電量に応じて弁開度を制御することで、後述する加圧ポンプ69,70から吐出されたブレーキ液の圧力を調節してマスタシリンダ33側へ開放することができる。
【0023】
このブレーキアクチュエータ35においては、第1液圧配管38がマスタカット弁41を介して連結通路43に接続されると共に、第2液圧配管39がマスタカット弁42を介して連結通路44に接続される。そして、第1液圧系統の連結通路43には、そこから分岐させるが如く2本の分岐通路45,46を接続し、第2液圧系統の連結通路44には、そこから分岐させるが如く2本の分岐通路47,48を接続する。第1液圧系統においては、その各々の分岐通路45,46を夫々に右前輪WFRの液圧配管36FRと左後輪WRLの液圧配管36RLに接続する。一方、第2液圧系統においては、その各々の分岐通路47,48を夫々に右後輪WRRの液圧配管36RRと左前輪WFLの液圧配管36FLに接続する。
【0024】
また、その各分岐通路45,46,47,48上には、夫々の制動装置37FL,37FR,37RL,37RR毎のブレーキ液圧を調整可能な液圧調圧部が車輪WFL,WFR,WRL,WRR毎に配設されている。その夫々の液圧調圧部は、車輪WFL,WFR,WRL,WRR毎に用意された保持弁50,51,52,53と液圧排出通路54,55,56,57と減圧弁58,59,60,61とで構成される。ここでは、各分岐通路45,46,47,48上に保持弁50,51,52,53が各々配備されており、更に、これら各保持弁50,51,52,53よりも下流側に液圧排出通路54,55,56,57が夫々に分岐通路45,46,47,48から分岐させるが如く接続されている。そして、その各液圧排出通路54,55,56,57上には、夫々に減圧弁58,59,60,61が配備されている。尚、ここで云う下流とは、ブレーキペダル操作時のブレーキ液の流動方向(つまり、制動装置37FL,37FR,37RL,37RRへと向かう方向)における下流側のことを表す。
【0025】
保持弁50,51,52,53は、所謂常開式の電磁弁であって、非励磁状態の通常時には開弁状態にあり、電子制御装置1の指令による通電に伴って励磁状態となり閉弁させられるものである。一方、減圧弁58,59,60,61は、所謂常閉式の電磁弁であって、非励磁状態の通常時には閉弁状態にあり、電子制御装置1の指令による通電に伴って励磁状態となり開弁させられるものである。
【0026】
また、このブレーキアクチュエータ35には、第1液圧系統の夫々の液圧排出通路54,55を一纏めにする液圧排出集合通路62と、第2液圧系統の夫々の液圧排出通路56,57を一纏めにする液圧排出集合通路63と、が用意されており、その夫々の液圧排出集合通路62,63が各々補助リザーバ64,65に接続されている。
【0027】
更に、第1液圧系統においては、連結通路43と各分岐通路45,46との分岐点から分岐して液圧排出集合通路62に接続されるポンプ通路66を配設する。これと同様に、第2液圧系統には、連結通路44と各分岐通路47,48との分岐点から分岐して液圧排出集合通路63に接続されるポンプ通路67を配設する。
【0028】
その夫々のポンプ通路66,67には、電動機(ここでは1つの電動機68)によって駆動される加圧ポンプ(加圧部)69,70を各々配備している。これら各加圧ポンプ69,70は、夫々にマスタカット弁41,42側の各分岐点に向けてブレーキ液を吐出させるものであり、夫々に分岐通路45,46と分岐通路47,48に対して加圧されたブレーキ液圧を供給する。つまり、第1液圧系統の加圧ポンプ69は、右前輪WFRと左後輪WRLに発生させる制動力を増大させるべく、夫々の制動装置37FR,37RLに供給するブレーキ液圧の増圧を行う。一方、第2液圧系統の加圧ポンプ70は、左前輪WFLと右後輪WRRに発生させる制動力を増大させるべく、夫々の制動装置37FL,37RRに供給するブレーキ液圧の増圧を行う。尚、電動機68は、図示しないバッテリからの電力供給により駆動する。また、その各ポンプ通路66,67には、加圧ポンプ69,70から吐出された夫々のブレーキ液の脈動を回避するダンパ室71,72が配設されている。
【0029】
また、このブレーキアクチュエータ35には、第1及び第2の液圧配管38,39から各々分岐して補助リザーバ64,65に夫々接続される吸入通路73,74が配設されており、更に、その夫々の吸入通路73,74の補助リザーバ64,65側にリザーバカット逆止弁75,76が配設されている。
【0030】
この制動システムには、制御対象輪の制動力を増加させる増圧モード、制御対象輪の制動力をそのときの大きさのまま保持する保持モード、制御対象輪の制動力を減少させる減圧モードがある。制御対象輪を増圧モード、保持モード又は減圧モードに制御する際、電子制御装置1は、その制御対象輪を含む液圧系統のマスタカット弁41,42を閉弁させる。
【0031】
制御対象輪が第1液圧系統に含まれているときには、マスタカット弁41を閉弁して、第1液圧配管38と保持弁50,51の上流の連結通路43とを遮断する。そして、例えば右前輪WFRが制御対象輪の場合、電子制御装置1は、増圧モードへと制御する際に、保持弁50が開弁状態で且つ減圧弁58が閉弁状態となるよう制御することで、右前輪WFRの制動装置37FRへのブレーキ液圧を増加させる。また、電子制御装置1は、保持モードへと制御する際に、保持弁50と減圧弁58が閉弁状態となるよう制御することで、右前輪WFRの制動装置37FRへのブレーキ液圧をそのときの大きさのまま保持させる。また、電子制御装置1は、減圧モードへと制御する際に、保持弁50が閉弁状態で且つ減圧弁58が開弁状態となるよう制御することで、右前輪WFRの制動装置37FRへのブレーキ液圧を減少させる。
【0032】
これと同様に、制御対象輪が第2液圧系統に含まれているときには、マスタカット弁42を閉弁して、第2液圧配管39と保持弁52,53の上流の連結通路44とを遮断する。そして、例えば左前輪WFLが制御対象輪の場合、電子制御装置1は、増圧モードへと制御する際に、保持弁53が開弁状態で且つ減圧弁61が閉弁状態となるよう制御することで、左前輪WFLの制動装置37FLへのブレーキ液圧を増加させる。また、電子制御装置1は、保持モードへと制御する際に、保持弁53と減圧弁61が閉弁状態となるよう制御することで、左前輪WFLの制動装置37FLへのブレーキ液圧をそのときの大きさのまま保持させる。また、電子制御装置1は、減圧モードへと制御する際に、保持弁53が閉弁状態で且つ減圧弁61が開弁状態となるよう制御することで、左前輪WFLの制動装置37FLへのブレーキ液圧を減少させる。
【0033】
車両挙動制御装置は、旋回中の車両挙動の安定化制御を行う。その安定化制御とは、所謂ビークルスタビリティ制御のことである。車両10は、運転者のステアリングホイール81の操舵操作に伴う旋回動作の最中に、その挙動がニュートラルステア傾向を示すこともあれば、オーバーステア傾向やアンダーステア傾向を示すことがある。電子制御装置1は、車速、車両前後加速度や車両横加速度、ヨーレート等の車両走行情報に基づいて、車両10の挙動を判断する。尚、車速は、例えば車輪WFL,WFR,WRL,WRRの車輪速度(車輪速度センサ91,92,93,94で検出)や図示しない変速機の出力軸の回転速度等から推定すればよい。また、車両前後加速度は、車両前後加速度センサ95に検出させ、車両横加速度は車両横加速度センサ96に検出させればよい。また、ヨーレートは、ヨーレートセンサ97に検出させればよい。
【0034】
電子制御装置1は、車体の実際の旋回状態が過大なオーバーステア傾向を示すときに、前側の旋回外輪が増圧モードとなるようにブレーキアクチュエータ35を制御し、その旋回外輪に対して目標旋回状態(例えばニュートラルステア傾向又は弱アンダーステア傾向)に近づける為の所定の大きさの制動力を発生させる。その制動力は、実際の旋回状態と目標旋回状態との偏差に応じて決まる。これにより、オーバーステア傾向を示すヨーモーメントとは逆向きのヨーモーメントが働くので、車体は、目標旋回状態を保ったまま旋回動作を行うことができる。また、この電子制御装置1は、車体の実際の旋回状態が過大なアンダーステア傾向(弱アンダーステアよりも強いアンダーステア)を示すときに、動力源20の出力を減少させると共に、後ろ側の旋回内輪が増圧モードとなるようにブレーキアクチュエータ35を制御し、その旋回内輪に対して目標旋回状態に近づける為の所定の大きさの制動力を発生させる。その制動力についても、実際の旋回状態と目標旋回状態との偏差に応じて決まる。これにより、アンダーステア傾向を示すヨーモーメントとは逆向きのヨーモーメントが働くので、車体は、目標旋回状態を保ったまま旋回動作を行うことができる。
【0035】
この車両挙動の安定化制御の実行中には、一輪だけがブレーキ液圧の増圧制御の対象になるので、この制御対象輪を含む液圧系統のみを液圧制御すればよい。従って、電子制御装置1は、車両挙動の安定化制御を行う際に、第1液圧系統又は第2液圧系統の内で制御対象輪を含むもののみを液圧制御対象とし、他の液圧系統を液圧制御が行われないように非液圧制御対象とする。この電子制御装置1は、車両挙動の安定化制御を行う際に、液圧制御対象となる液圧系統のマスタカット弁41(42)を閉弁させると共に、非液圧制御対象となる液圧系統のマスタカット弁42(41)を開弁させたままにする。
【0036】
ところで、運転者は、この車両挙動の安定化制御の実行中に、ステアリングホイール81を今とは逆向きに操舵操作する(所謂切り返し操舵を行う)ことがある。例えば、運転者は、車体のオーバーステア傾向を感じ取ったときに、ステアリングホイール81を今とは逆向きに操舵操作して、所謂カウンターステアをあてることがある。また、運転者は、今とは逆の旋回方向のコーナへと進入するときに、ステアリングホイール81を今とは逆向きに操舵操作する。電子制御装置1は、その切り返し操舵によって車両10の旋回方向が切り替わり、車体の実際の旋回状態が過大なオーバーステア傾向又は過大なアンダーステア傾向を示すときに、これまでとは逆の液圧系統に含まれる車輪を制御対象輪とする。従って、この電子制御装置1は、これまで非液圧制御対象であった新たに液圧制御対象となる液圧系統のマスタカット弁42(41)を閉弁させると共に、これまで液圧制御対象であった新たに非液圧制御対象となる液圧系統のマスタカット弁41(42)を開弁させる。
【0037】
その際、車体の実際の旋回状態が過大なオーバーステア傾向を示すまで待ってから(つまり新たな旋回方向における車両挙動の安定化制御の開始時になってから)夫々のマスタカット弁41,42の開閉状態の切り替えを行い、新たな制御対象輪を増圧モードに切り替えると、車両10においては、新たな制御対象輪への制動力の付与が遅れ、安定化制御にも遅れが生じてしまう可能性がある。これが為、電子制御装置1には、車両10の旋回方向が逆向きに切り替わるのか否か予測判定させ、旋回方向の切り替わりが起こることを推定できた場合、新たな旋回方向での車両挙動の安定化制御が実際に開始される前に、新たな制御対象輪に対してブレーキ液圧の予圧を付与しておく。
【0038】
その予測判定は、例えばステアリングホイール81の操舵操作方向の切り替わりを観て行えばよい。その操舵操作方向の切り替わりは、操舵角度センサ82から検出したステアリングホイール81の操舵角度の情報から把握できる。操舵角度センサ82は、例えば、ステアリングホイール81が中立位置(ステアリングセンタ)から反時計回り(左旋回方向)に操舵操作されたときに正の値の操舵角度を検出し、ステアリングセンタから時計回りに操舵操作されたときに負の値の操舵角度を検出する。従って、電子制御装置1は、その操舵角度(検出信号)の正又は負の情報を観ることで運転者による切り返し操舵を把握できるので、正から負に又は負から正に変わったときに、車両10の旋回方向が逆向きに切り替わるとの推定を行うことができる。
【0039】
予圧制御は、新たな制御対象輪が含まれる液圧系統、つまり非液圧制御対象から新たに液圧制御対象となる液圧系統のマスタカット弁42(41)を閉弁させ、その新たな制御対象輪を増圧モードへと制御することで行う。その際、新たな制御対象輪に付与する予圧は、この技術分野にて従来から周知の大きさに設定すればよく、例えば新たな制御対象輪に実際に制動力が作用する手前のブレーキ液圧等が考えられる。この予圧制御は、例えば車両10の旋回方向が逆向きに切り替わると予測判定されたときを開始時間に設定すればよい。これにより、新たな旋回方向での車両挙動の安定化制御を実際に開始する際に、新たな制御対象輪に対して応答良く制動力が加わることになるので、その安定化制御の応答遅れを軽減させることができる。
【0040】
例えば、図3の左図に示すように、左旋回時に車体の実際の旋回状態が過大なオーバーステア傾向を示すときには、右前輪WFRが増圧モードへの制御対象輪になる。これが為、このときの電子制御装置1は、その右前輪WFRが含まれる第1液圧系統のマスタカット弁41を閉弁させると共に、非液圧制御対象となる第2液圧系統のマスタカット弁42を開弁させる(図4)。そして、この電子制御装置1は、その右前輪WFRを増圧モードに制御して、所定の大きさの制動力を付与し、過大なオーバーステア傾向が抑えられるようにする。また、この車両挙動の安定化制御中に今とは逆向きの操舵操作が行われた場合、電子制御装置1は、車両10が右旋回方向に切り替わると推定し、次に液圧制御対象となる第2液圧系統のマスタカット弁42を開弁状態から閉弁状態に切り替え(図4)、新たな制御対象輪である左前輪WFLを増圧モードにして予圧を付与しておく。そして、この電子制御装置1は、図3の右図に示すように右旋回となり車体の実際の旋回状態が過大なオーバーステア傾向を示したときに、これまで液圧制御対象であった第1液圧系統のマスタカット弁41を開弁させると共に、新たな制御対象輪である左前輪WFLへのブレーキ液圧を増圧させる。その予圧制御により、左前輪WFLには、安定化制御の為のブレーキ液圧の増圧と共に制動力が発生する。これにより、車両10においては、その左前輪WFLに対して応答良く所定の大きさの制動力が付与されるので、右旋回時の過大なオーバーステア傾向を応答良く抑えることができる。従って、この車両挙動制御装置は、旋回方向が切り替わった際の車両挙動の安定化制御におけるブレーキ液圧の制御応答性を向上させることができる。
【0041】
ここで、運転者によるブレーキペダル31の操作が行われている状態で予圧制御が開始され、その予圧制御中に運転者が操作中のブレーキペダル31を踏み増し操作した場合、その運転者は、実際の踏み込み操作量が意図しているよりも少なく、そのペダル操作に固さや重さ、つまり所謂板ブレーキ感を覚えることがある。何故ならば、予圧制御中には、マスタカット弁41,42が双方とも閉弁されており、マスタシリンダ33側の第1液圧配管38と保持弁50,51の上流の連結通路43との間、マスタシリンダ33側の第2液圧配管39と保持弁52,53の上流の連結通路44との間のブレーキ液の流動が遮断されているからである。
【0042】
そこで、この車両挙動制御装置には、運転者によるブレーキ操作(ブレーキ踏み増し操作又はブレーキ解除側への操作)の最中に第1及び第2の液圧系統のマスタカット弁41,42が両方とも閉弁されると把握した場合、そのマスタカット弁41,42を両方とも閉弁させる前までに運転者によるブレーキ踏み増し操作が検知されたならば、運転者に板ブレーキ感を覚えさせない又は運転者の感じる板ブレーキ感を緩和させるように、両方のマスタカット弁41,42の閉弁制御の制御形態を通常時に対して変更させる。尚、その通常時とは、板ブレーキ感を抑制する必要が無いときの両方のマスタカット弁41,42の閉弁制御時のことである。
【0043】
そのマスタカット弁41,42が両方とも閉弁される可能性のある状況とは、車両挙動の安定化制御における予圧制御の開始条件が成立したときである。但し、その安定化制御での液圧制御だけに限らず、これ以外の制御において両方のマスタカット弁41,42が閉弁される可能性のあるときについても該当する。従って、開弁状態の両方のマスタカット弁41,42をブレーキ操作の最中に双方とも閉弁させるときについても、マスタカット弁41,42が両方とも閉弁される可能性のある状況に該当する。
【0044】
また、ここで例示している制動システムにおいては、マスタシリンダ圧の検出を行うマスタシリンダ圧センサが用意されていない。これが為、車両挙動制御装置は、マスタシリンダ圧の変化から運転者によるブレーキ操作を把握することができない。ここで、両方のマスタカット弁41,42が閉弁されるまでは、その内の少なくとも一方が開弁状態になっている。このことから、運転者がブレーキ踏み増し操作を行ったときは、その開弁状態のマスタカット弁41,42の属する液圧系統の車輪に対してのブレーキ液圧が増加し、その車輪のスリップ率が減速側に変化する。従って、ここでは、その車輪のスリップ率に基づいて、運転者によるブレーキ踏み増し操作が行われたのか否かを把握させる。
【0045】
板ブレーキ感を抑制し、その板ブレーキ感を覚えさせない又は緩和させる為には、運転者によるブレーキ踏み増し操作の最中に両方のマスタカット弁41,42を閉弁させないことである。これが為、この車両挙動制御装置には、両方のマスタカット弁41,42が閉弁状態となる閉弁制御の開始時間を通常時よりも遅らせればよい。また、この車両挙動制御装置には、その通常時と同じ開始時間で又はその開始時間を通常時よりも遅らせた上で、開弁状態のマスタカット弁41,42を通常時よりも緩やかに閉弁させていってもよい。
【0046】
ここでは、車両挙動の安定化制御中の動作を例に挙げて説明する。従って、車両挙動制御装置には、運転者によるブレーキ操作の最中に予圧制御が実行されると把握した場合、その予圧制御が開始される前までに運転者によるブレーキ踏み増し操作が検知されたならば、運転者に板ブレーキ感を覚えさせない又は運転者の感じる板ブレーキ感を緩和させるように、予圧制御の制御形態を通常の予圧制御に対して変更させる。通常の予圧制御とは、その板ブレーキ感を抑制する為に行われる予圧制御以外の制御形態で実行されるもののことを云う。
【0047】
この例示では、ステアリングホイール81の操舵操作方向が逆向きに切り替わったときに、旋回方向の切り替わり後に予圧制御が実行されると予測判定させる。また、この例示では、非液圧制御対象の液圧系統に属する車輪のスリップ率に基づいて、運転者によるブレーキ踏み増し操作が行われたのか否かを把握させる。
【0048】
また、この例示では、両方のマスタカット弁41,42を閉弁状態にする為の閉弁制御の開始時間を遅らせて、これにより板ブレーキ感を抑制するのであれば、予圧制御の開始時間そのものを遅らせる(図5)。例えば、その開始時間は、運転者によるブレーキ踏み増し操作が終わってからに設定してもよい。これにより、運転者は、その後で予圧制御が実行されたときに板ブレーキ感を覚えずともすむ。しかしながら、運転者は、必ずしも旋回方向切り替わり後の車両挙動の安定化制御(予圧制御終了後のブレーキ液圧の増圧制御)が開始されるまでにブレーキ踏み増し操作を終えているとは限らない。また、ブレーキ踏み増し操作の終了の検知時からその安定化制御の開始時までの時間が短すぎた場合、次の制御対象輪に対して所望の予圧を付与できない可能性がある。そこで、遅らせる開始時間は、次の制御対象輪に対して所望の予圧が付与できる範囲内で設定してもよい。
【0049】
これらを勘案して、車両挙動制御装置には、そのような所望の予圧の付与が可能な開始時間(以下、「最遅延開始時間」という。)までにブレーキ踏み増し操作の終了を検知すれば、その検知後、その最遅延開始時間までの間に予圧制御の開始時間を設定させればよい。これにより、運転者が板ブレーキ感を覚えずにブレーキ踏み増し操作でき、且つ、次の制御対象輪に対する所望の予圧制御も実行することができる。一方、この車両挙動制御装置には、最遅延開始時間までにブレーキ踏み増し操作の終了が検知されなければ、その最遅延開始時間を予圧制御の開始時間として設定させればよい。これにより、少なくとも予圧制御が開始されるまで運転者に板ブレーキ感を覚えさせず、その開始後には次の制御対象輪に対する所望の予圧制御を行うことができる。
【0050】
ここで、前述したように、開弁状態のマスタカット弁41,42を通常時よりも緩やかに閉弁させていくことも可能である。この例示に当て嵌める場合には、予圧制御において閉弁制御の対象となる一方のマスタカット弁41(42)を通常の予圧制御時よりも緩やかに閉弁させていく(図6)。この緩勾配による閉弁制御の開始時間は、上記に例示した予圧制御の開始時間の内の何れかに設定すればよい。また、この緩勾配による閉弁制御を行う際には、遅くとも車両挙動の安定化制御の開始時(予圧制御終了時)までに、そのマスタカット弁41(42)の閉弁動作を終わらせることが好ましい。更に、この予圧制御においては、マスタカット弁41(42)の閉弁動作と共に、次の制御対象輪の保持弁50(53)及び減圧弁58(61)を制御して徐々に増圧モードに切り替えていってもよい。このときには、現在の制御対象輪の属する液圧系統のマスタカット弁42(41)を徐々に開弁させていくと共に(図6)、その制御対象輪の保持弁53(50)及び減圧弁61(58)を制御して徐々に減圧モードに切り替えてもよい。
【0051】
この緩勾配によるマスタカット弁41(42)の閉弁制御は、上述した最遅延開始時間までにブレーキ踏み増し操作の終了が検知されなかったときに実行することが好ましい。何故ならば、これにより、板ブレーキ感が徐々に増していくことになるので、そのマスタカット弁41(42)を一気に閉弁させるよりも予圧制御が開始されてからの板ブレーキ感を緩和させることができるからである。また、これにより、運転者が板ブレーキ感を感じ取る時間を短縮できるからである。
【0052】
以下、この車両挙動制御装置の演算処理動作の一例について図7のフローチャートに基づき説明する。
【0053】
前述したように、車両挙動の安定化制御中には、第1液圧系統又は第2液圧系統の内の何れか一方のみが液圧制御中になっており、車体がオーバーステア傾向を示していれば前側の旋回外輪に、アンダーステア傾向を示していれば後ろ側の旋回内輪に所定の制動力を発生させる。従って、電子制御装置1は、先ず第1液圧系統又は第2液圧系統の内の何れか一方のみが液圧制御中になっているのか否かの判定を行う(ステップST10)。尚、このステップST10においては、その安定化制御以外の制御であっても、一方の液圧系統だけでの液圧制御を実行している場合があれば、肯定判定が行われる。
【0054】
電子制御装置1は、第1液圧系統と第2液圧系統の双方で液圧制御を行っている又は液圧制御自体が行われていないと判定すると、この演算処理動作を一旦終了させる。
【0055】
一方、この電子制御装置1は、第1液圧系統又は第2液圧系統の内の何れか一方のみが液圧制御中であるとの判定を行った場合、旋回方向の切り替わりに伴う予圧制御の実施要否判定を実行する(ステップST20)。このステップST20においては、運転者によるステアリングホイール81の操舵操作方向が逆向きになったことを検知して、旋回方向の切り替わりが起こると予測判定されたときに、予圧制御の実施が必要であるとの判定を行う。また、このステップST20においては、そのような予測判定が為されなかったときに、予圧制御の実施が不要であるとの判定を行う。
【0056】
電子制御装置1は、このステップST20の判定結果について、予圧制御の実施が必要とされているのか否かを観る(ステップST30)。この電子制御装置1は、予圧制御の実施が不要であれば、この演算処理動作を一旦終わらせる。これに対して、電子制御装置1は、予圧制御の実施が必要であれば、運転者によるブレーキ踏み増し操作中との判定が為されているのか否かを観る(ステップST40)。
【0057】
運転者によるブレーキ踏み増し操作中であるのか否かの判定については、これまでの図7の演算処理動作の流れの中の何れかの工程で実行してもよく、この演算処理動作と平行に実行してもよい。ここでは、後者の場合を例に挙げて、下記に図8のフローチャートを用いて説明する。
【0058】
車輪のスリップ率Sは、車速Vと車輪速度Vwとから演算される。このスリップ率Sの演算式を下記の式1の如く設定すると、正の値を示すときには、減速側のスリップ率(以下、「減速スリップ率」という。)になり、負の値を示すときには、加速側のスリップ率(以下、「加速スリップ率」という。)になる。
【0059】
S={(V−Vw)/V}*100 … (1)
【0060】
車両挙動の安定化制御中には、車両10が減速することになり、車輪のスリップ率S(n)が減速側になる。その際、ブレーキ操作が行われていないときには、安定化制御の制御対象輪の減速スリップ率Sが他の車輪の減速スリップ率Sよりも減速側に大きくなっている。そして、この状態でブレーキ操作が行われると、制御対象輪の減速スリップ率Sにブレーキ操作に伴う影響は現れないが、今時点で非液圧制御対象の液圧系統に属する車輪(以下、「非制御対象輪」という。)については、減速スリップ率Sが減速側に大きくなっていく(図9)。電子制御装置1は、この非制御対象輪の減速スリップ率Sの変化を監視して、運転者によるブレーキ踏み増し操作が行われているのか否かを判定する。
【0061】
先ず、電子制御装置1は、車両10が減速しているのか否かを判定する(ステップST101)。この判定は、例えば、車速や車両前後加速度等の車両走行情報に基づいて行う。減速時でなければ、ブレーキ踏み増し操作が行われていないと判断できるので、電子制御装置1は、後述するステップST105に進んでブレーキ踏み増し操作されていないと判定する。
【0062】
一方、電子制御装置1は、減速時であれば、現時点で運転者によるブレーキ踏み増し操作が行われているとの判定が為されているのか否かを観る(ステップST102)。
【0063】
ブレーキ踏み増し操作が行われていると判定されていれば、この電子制御装置1は、非制御対象輪の減速スリップ率Sが所定の判定解除閾値S0よりも小さくなっているのか否かを判定する(ステップST103)。一方、ブレーキ踏み増し操作が行われていないと判定されていれば、この電子制御装置1は、非制御対象輪の減速スリップ率Sが所定の判定閾値S1よりも大きくなっているのか否かを判定する(ステップST104)。
【0064】
ここで、車両挙動の安定化制御中には、ブレーキ操作が行われていなくても、非制御対象輪のスリップ率Sが減速側になっている。これが為、この安定化制御中の車両10においては、非制御対象輪において減速スリップ率Sが演算されたからといって、必ずしも運転者がブレーキ操作を行っているとは限らない。
【0065】
そこで、例えば、非制御対象輪の減速スリップ率Sについて、ブレーキ操作未実施の安定化制御中の値を実験やシミュレーションで求めると共に、ブレーキ操作されているときの安定化制御中の値を実験やシミュレーションで求め、これらの境界に相当する値を予め把握する。ここでは、例えば、その境界に相当する減速スリップ率S又はこの減速スリップ率Sについてスリップ率演算誤差等を鑑みて補正した値を判定解除閾値S0に設定する。また、この判定解除閾値S0をそのまま判定閾値S1に設定してもよいが、ここでは、この判定解除閾値S0よりも大きい値を判定閾値S1に設定する。これは、判定閾値S1を判定解除閾値S0と同じ値に設定すると、例えば、ブレーキ操作していないにも拘わらず、路面摩擦係数の変化や悪路走行等で減速スリップ率Sが判定解除閾値S0を超えてしまい、その誤判定によっても予圧制御の制御形態を変更してしまう可能性があるからである。故に、判定解除閾値S0に対する増加代は、そのような変則的な事態を推察し、その推察結果に基づいて決めればよい。尚、全ての変則的な事態に対応することは難しく、その増加代を大きくし過ぎると、板ブレーキ感の抑制という効果が薄れてしまうこともある。これが為、判定閾値S1は、例えば変則的な事態の起こる頻度を鑑みて、その頻度が多いものにのみ対応させるべく増加代を決めることが好ましい。
【0066】
電子制御装置1は、ステップST103で減速スリップ率Sが判定解除閾値S0よりも小さくないと判定した場合、未だ運転者によるブレーキ踏み増し操作が行われていると判断してステップST101に戻る。一方、そのステップST103で減速スリップ率Sが判定解除閾値S0よりも小さくなったと判定した場合、この電子制御装置1は、運転者によるブレーキ踏み増し操作が行われていないと判定する(ステップST105)。電子制御装置1は、ステップST101に戻り、同様の演算処理を繰り返す。
【0067】
また、電子制御装置1は、ステップST104で減速スリップ率Sが判定閾値S1よりも大きくなっていないと判定した場合、運転者によるブレーキ踏み増し操作が行われていないと判断してステップST101に戻る。一方、そのステップST104で減速スリップ率Sが判定閾値S1よりも大きくなったと判定した場合、この電子制御装置1は、運転者によるブレーキ踏み増し操作が行われたと判定する(ステップST106)。電子制御装置1は、ステップST101に戻り、同様の演算処理を繰り返す。
【0068】
電子制御装置1は、ステップST40において、この図8による判定結果を利用する。その図8の演算処理動作は繰り返されているので、ステップST40においては、最新の判定結果を用いて判断させる。
【0069】
電子制御装置1は、運転者によるブレーキ踏み増し操作中との判定が為されていれば、予圧制御の制御形態を通常の予圧制御に対して変更する(ステップST50)。一方、この電子制御装置1は、運転者によるブレーキ踏み増し操作中との判定が為されていなければ、通常の予圧制御を実行する(ステップST60)。
【0070】
このように、この車両挙動制御装置は、旋回方向の切り替わりが検知されたときに、新たに制御対象輪となる車輪の属する液圧系統のマスタカット弁41(42)を開弁状態から閉弁状態へと制御し、その制御対象輪に対してブレーキ液圧の予圧を付与する。従って、この車両挙動制御装置は、車両挙動の安定化制御の開始と共に、その制御対象輪に対して安定化制御の為の制動力を発生させることができる。つまり、この車両挙動制御装置は、旋回方向の切り替わりに伴い車両挙動の安定化制御が必要となったときに、その安定化制御に要する制動力付与の為のブレーキ液圧の制御応答性を向上させることができる。従って、この車両挙動制御装置は、運転者が切り返し操舵を行ったときにも、応答性の良い車両挙動の安定化制御を実行することができる。
【0071】
また、この車両挙動制御装置は、その非液圧制御対象の液圧系統における予圧制御の開始前までに運転者によるブレーキ踏み増し操作が行われたときに、予圧制御の制御形態を通常の予圧制御に対して変更する。その変更の際には、その非液圧制御対象の液圧系統におけるマスタカット弁41(42)の閉弁制御の開始時間を通常よりも遅らせることにより、予圧制御が開始されるまではマスタカット弁41(42)の上下流間のブレーキ液の流動が可能になる。従って、この車両挙動制御装置は、予圧制御が実行されても運転者に板ブレーキ感を覚えさせない。また、その変更の際には、その液圧系統におけるマスタカット弁41(42)を通常よりもゆっくりと閉弁させることで、予圧制御が開始されたとしても、マスタカット弁41(42)の上下流間のブレーキ液の流動量が徐々に制限されていく、従って、この車両挙動制御装置は、予圧制御が実行されても運転者の感じ取る板ブレーキ感を緩和させることができる。
【0072】
ここで、この実施例においては、運転者のブレーキ踏み増し操作の判定について、非液圧制御対象の液圧系統に属する車輪の減速スリップ率Sの変化を監視することで行っている。しかしながら、例えば、走行中の路面摩擦係数が低くなったとき、悪路を走行しているとき等の路面変化によって、誤判定となる可能性がある。この為、前述したように、判定解除閾値S0に対する判定閾値S1の増加代の設定することで、誤った判定が為される可能性を低減すればよい。但し、これを以てしても、誤判定となる可能性が必ずしも無くなるとは云い難い。従って、運転者のブレーキ踏み増し操作の判定については、その減速スリップ率Sの変化の監視と共に、車両前後加速度の変化や車速の変化を観てから結論を出すことが望ましい。例えば、下記のように判定を行う。尚、ここでは、便宜上、前述した減速スリップ率Sの変化に基づき行われたブレーキ踏み増し操作されているとの判定を仮判定とする。
【0073】
[減速スリップ率Sの変化と車両前後加速度の変化の監視]
車両前後加速度が減速方向へと変化したときには、運転者によるブレーキ踏み増し操作が行われているとの仮判定が可能である。従って、電子制御装置1には、減速スリップ率Sの変化と車両前後加速度の変化の双方においてブレーキ踏み増し操作中との仮判定が為されている場合、運転者によるブレーキ踏み増し操作が行われているとの最終的な判定を実行させる。一方、この電子制御装置1には、減速スリップ率Sの変化と車両前後加速度の変化の内の何れかにおいてブレーキ踏み増し操作中ではないとの仮判定が為されている場合、運転者によるブレーキ踏み増し操作が行われていないとの最終的な判定を実行させる。
【0074】
[減速スリップ率Sの変化と車速の変化の監視]
車速が減速方向へと変化したときには、運転者によるブレーキ踏み増し操作が行われているとの仮判定が可能である。従って、電子制御装置1には、減速スリップ率Sの変化と車速の変化の双方においてブレーキ踏み増し操作中との仮判定が為されている場合、運転者によるブレーキ踏み増し操作が行われているとの最終的な判定を実行させる。一方、この電子制御装置1には、減速スリップ率Sの変化と車速の変化の内の何れかにおいてブレーキ踏み増し操作中ではないとの仮判定が為されている場合、運転者によるブレーキ踏み増し操作が行われていないとの最終的な判定を実行させる。
【0075】
[減速スリップ率Sの変化と車両前後加速度の変化と車速の変化の監視]
この場合、電子制御装置1には、減速スリップ率Sの変化と車両前後加速度の変化と車速の変化の全てにおいてブレーキ踏み増し操作中との仮判定が為されている場合、運転者によるブレーキ踏み増し操作が行われているとの最終的な判定を実行させる。一方、この電子制御装置1には、減速スリップ率Sの変化と車両前後加速度の変化と車速の変化の内の何れかにおいてブレーキ踏み増し操作中ではないとの仮判定が為されている場合、運転者によるブレーキ踏み増し操作が行われていないとの最終的な判定を実行させる。
【0076】
また、この実施例においては、マスタシリンダ圧センサが設けられていない制動システムを例に挙げた。しかしながら、この車両挙動制御装置は、第1又は第2の液圧配管38,39の内の何れか一方にマスタシリンダ圧センサが配設された車両10についても上記の如き制御の対象にしてもよい。これにより、例えば、経年変化等によりマスタシリンダ圧センサの検出精度が落ちた場合でも、この車両挙動制御装置は、その検出結果に拘わらず上述したものと同様の効果を得ることができる。
【産業上の利用可能性】
【0077】
以上のように、本発明に係る車両挙動制御装置は、旋回方向が切り替わった際のブレーキ液圧の制御応答性を向上させる技術に有用である。
【符号の説明】
【0078】
1 電子制御装置
10 車両
31 ブレーキペダル
33 マスタシリンダ
35 ブレーキアクチュエータ
37FL,37FR,37RL,37RR 制動装置
41,42 マスタカット弁
50,51,52,53 保持弁
58,59,60,61 減圧弁
81 ステアリングホイール
82 操舵角度センサ
91,92,93,94 車輪速度センサ
95 車両前後加速度センサ
96 車両横加速度センサ
97 ヨーレートセンサ
WFL,WFR,WRL,WRR 車輪
【特許請求の範囲】
【請求項1】
車両の実際の旋回状態と目標旋回状態との偏差に応じた制動力を所定の制御対象輪に発生させることで車両挙動の安定化制御を行う際、2つのブレーキ液圧の液圧系統の中で前記制御対象輪の属するものを液圧制御対象に設定して当該液圧系統のマスタカット弁を閉弁させると共に、他方の液圧系統を非液圧制御対象に設定して当該液圧系統のマスタカット弁を開弁させ、前記液圧制御対象の液圧系統のブレーキ液圧を調圧することで前記制御対象輪に前記制動力を発生させる車両挙動制御装置であって、
車両の旋回方向の切り替わりが予測された場合、切り替わり後の旋回方向における実際の旋回状態と目標旋回状態との偏差に応じた制動力を次の制御対象輪に対して発生させる前に、該次の制御対象輪の属する今現在は非液圧制御対象の液圧系統のマスタカット弁を閉弁させると共に、該次の制御対象輪に対してブレーキ液圧の予圧を付与することを特徴とした車両挙動制御装置。
【請求項2】
前記車両の旋回方向の切り替わりの予測後、前記予圧の付与の前に運転者によるブレーキ踏み増し操作があった場合、前記非液圧制御対象の液圧系統のマスタカット弁の閉弁開始時間を遅らせてから前記予圧の付与を行うことを特徴とした請求項1記載の車両挙動制御装置。
【請求項3】
前記車両の旋回方向の切り替わりの予測後、前記予圧の付与の前に運転者によるブレーキ踏み増し操作があった場合、前記予圧を付与する際に、前記非液圧制御対象の液圧系統のマスタカット弁を徐々に閉弁させることを特徴とした請求項1記載の車両挙動制御装置。
【請求項4】
2つのブレーキ液圧の液圧系統の内の何れか一方に属する所定の制御対象輪に対して制動力を発生させることで車両挙動の安定化制御を行う際、前記制御対象輪の属する液圧系統を液圧制御対象に設定して当該液圧系統のマスタカット弁を閉弁させると共に、他方の液圧系統を非液圧制御対象に設定して当該液圧系統のマスタカット弁を開弁させ、前記液圧制御対象の液圧系統のブレーキ液圧を調圧することで前記制御対象輪に前記制動力を発生させる車両挙動制御装置であって、
制御対象輪を前記非液圧制御対象の液圧系統に属している車輪に切り替えるべく、該非液圧制御対象の液圧系統を液圧制御対象に切り替え、且つ、前記液圧制御対象の液圧系統を非液圧制御対象に切り替える際に、該今現在非液圧制御対象に設定されている液圧系統のマスタカット弁を閉弁させると共に、前記次の制御対象輪に対してブレーキ液圧の予圧を付与することを特徴とした車両挙動制御装置。
【請求項5】
前記各液圧系統の内、一方は左前輪及び右後輪のブレーキ液圧の調圧が可能であり、他方は右前輪及び左後輪のブレーキ液圧の調圧が可能であることを特徴とした請求項1,2,3又は4に記載の車両挙動制御装置。
【請求項1】
車両の実際の旋回状態と目標旋回状態との偏差に応じた制動力を所定の制御対象輪に発生させることで車両挙動の安定化制御を行う際、2つのブレーキ液圧の液圧系統の中で前記制御対象輪の属するものを液圧制御対象に設定して当該液圧系統のマスタカット弁を閉弁させると共に、他方の液圧系統を非液圧制御対象に設定して当該液圧系統のマスタカット弁を開弁させ、前記液圧制御対象の液圧系統のブレーキ液圧を調圧することで前記制御対象輪に前記制動力を発生させる車両挙動制御装置であって、
車両の旋回方向の切り替わりが予測された場合、切り替わり後の旋回方向における実際の旋回状態と目標旋回状態との偏差に応じた制動力を次の制御対象輪に対して発生させる前に、該次の制御対象輪の属する今現在は非液圧制御対象の液圧系統のマスタカット弁を閉弁させると共に、該次の制御対象輪に対してブレーキ液圧の予圧を付与することを特徴とした車両挙動制御装置。
【請求項2】
前記車両の旋回方向の切り替わりの予測後、前記予圧の付与の前に運転者によるブレーキ踏み増し操作があった場合、前記非液圧制御対象の液圧系統のマスタカット弁の閉弁開始時間を遅らせてから前記予圧の付与を行うことを特徴とした請求項1記載の車両挙動制御装置。
【請求項3】
前記車両の旋回方向の切り替わりの予測後、前記予圧の付与の前に運転者によるブレーキ踏み増し操作があった場合、前記予圧を付与する際に、前記非液圧制御対象の液圧系統のマスタカット弁を徐々に閉弁させることを特徴とした請求項1記載の車両挙動制御装置。
【請求項4】
2つのブレーキ液圧の液圧系統の内の何れか一方に属する所定の制御対象輪に対して制動力を発生させることで車両挙動の安定化制御を行う際、前記制御対象輪の属する液圧系統を液圧制御対象に設定して当該液圧系統のマスタカット弁を閉弁させると共に、他方の液圧系統を非液圧制御対象に設定して当該液圧系統のマスタカット弁を開弁させ、前記液圧制御対象の液圧系統のブレーキ液圧を調圧することで前記制御対象輪に前記制動力を発生させる車両挙動制御装置であって、
制御対象輪を前記非液圧制御対象の液圧系統に属している車輪に切り替えるべく、該非液圧制御対象の液圧系統を液圧制御対象に切り替え、且つ、前記液圧制御対象の液圧系統を非液圧制御対象に切り替える際に、該今現在非液圧制御対象に設定されている液圧系統のマスタカット弁を閉弁させると共に、前記次の制御対象輪に対してブレーキ液圧の予圧を付与することを特徴とした車両挙動制御装置。
【請求項5】
前記各液圧系統の内、一方は左前輪及び右後輪のブレーキ液圧の調圧が可能であり、他方は右前輪及び左後輪のブレーキ液圧の調圧が可能であることを特徴とした請求項1,2,3又は4に記載の車両挙動制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−111383(P2012−111383A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−262787(P2010−262787)
【出願日】平成22年11月25日(2010.11.25)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月25日(2010.11.25)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]