
車両挙動制御装置
【課題】応答性良く予備ブレーキ圧を印加すること。
【解決手段】前後の旋回外輪WFL,WRL(WFR,WRR)の内の少なくとも一方に制動制御量を発生させることで車両10の挙動を安定させる車両挙動安定化制御を行う場合、その制動制御量を前後夫々の旋回外輪WFL,WRL(WFR,WRR)に発生させる条件が成立した場合に、前後の旋回内輪WFR,WRR(WFL,WRL)の内の少なくとも一方に対して予備ブレーキ圧を印加すること。その予備ブレーキ圧の印加は、車両挙動安定化制御の実行中に今の車両10の旋回動作とは逆向きの操舵操作が検知されたときに実行する。
【解決手段】前後の旋回外輪WFL,WRL(WFR,WRR)の内の少なくとも一方に制動制御量を発生させることで車両10の挙動を安定させる車両挙動安定化制御を行う場合、その制動制御量を前後夫々の旋回外輪WFL,WRL(WFR,WRR)に発生させる条件が成立した場合に、前後の旋回内輪WFR,WRR(WFL,WRL)の内の少なくとも一方に対して予備ブレーキ圧を印加すること。その予備ブレーキ圧の印加は、車両挙動安定化制御の実行中に今の車両10の旋回動作とは逆向きの操舵操作が検知されたときに実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ステアリングホイールがステアリングセンタに対して左右交互に連続して操舵操作(切り返し操舵)された際の車両の挙動を安定させる車両挙動制御装置に関する。
【背景技術】
【0002】
車体は、操舵操作が行われて旋回動作に移ると、旋回外輪側のサスペンションが沈み込んでロール運動を始める。一般に、切り返し操舵が行われた場合、ロール量は、ステアリングセンタからの1回目の操舵操作時と比べて、2回目以降の操舵操作時の方が大きくなる傾向にある。これは、例えば切り返し操舵で2回目の操舵操作が行われることによって、1回目の操舵操作で沈み込んでいるサスペンションに戻り方向(つまり伸び方向)の力が発生すると共に横加速度が素早く逆方向へと切り替わり、1回目の操舵操作によるロール運動が逆方向のロール運動へと一気に移り変わってロールモーメントを大きくするからである。その際には、ヨー運動についても2回目の操舵操作に呼応して逆方向へと一気に移り変わり、1回目の操舵操作が為されたときよりも大きなヨーモーメントが車体に作用する。
【0003】
従来、そのような2回目以降の操舵操作が行われたときに発生するヨーモーメントが過大である場合に、そのヨーモーメントを軽減させるべく逆方向のヨーモーメントを車体に作用させ、過大なロール量(ロールモーメント)を抑えつつ車両の挙動を安定した状態のままに保たせ続ける車両挙動制御装置が知られている。この車両挙動制御装置は、ブレーキアクチュエータを制御し、その逆方向のヨーモーメントを旋回外輪の内の少なくとも一方に加えた制動力によって発生させる。その際、この車両挙動制御装置は、次の逆向きの操舵操作によって新たに旋回外輪となる今現在旋回内輪になっている前後の車輪の内の少なくとも一方に予めブレーキ液圧(以下、「予備ブレーキ圧」という。)を印加しておき、その車輪が実際に旋回外輪となって制動力の発生を必要とするときに応答性良く制動力を加えることができるように制御する。その予備ブレーキ圧は、ブレーキアクチュエータを制御して発生させる。以下、その予備ブレーキ圧を加える制御のことを「予備ブレーキ圧制御」という。
【0004】
例えば、下記の特許文献1及び2には、この種の車両挙動制御装置について開示されている。この特許文献1の車両挙動制御装置は、旋回外輪の内の少なくとも一方に制動力を発生させることでオーバーステアの抑制制御を行うものであり、この抑制制御中に反旋回方向への操舵操作が検知された場合、その操舵操作に伴い次に旋回外輪となる今の旋回内輪の内の少なくとも一方に予備ブレーキ圧を加えている。また、特許文献2の車両挙動制御装置は、挙動制御輪の自動ブレーキにより車両水平面挙動制御を行うものであり、現在の挙動制御輪及びヨーレート偏差の変化傾向の組合せに応じて次の挙動制御輪を予測し、この車輪のみを予備ブレーキ圧を加える予圧制御対象輪とするものである。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−254724号公報
【特許文献2】特開平11−227586号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
予備ブレーキ圧制御は、実際の車両の挙動や運転者の切り返し操舵の検知を契機にして実施する方法でも一定の効果を得ることができる。しかしながら、急な切り返し操舵が行われる状況等においては、予備ブレーキ圧制御の出力が間に合わず又は出力不足となり、十分な効果を得られない可能性がある。
【0007】
また、そのような検知された実際の車両の挙動や運転者の切り返し操舵に基づく予備ブレーキ圧制御では、閾値の設定によって応答性を確保することも可能ではあるが、実際の車両の挙動等の誤判定による不要な作動を招く虞がある。
【0008】
そこで、本発明は、かかる従来例の有する不都合を改善し、急操舵等の素早い予備ブレーキ圧の出力が必要とされるときにも応答性良く予備ブレーキ圧を印加できる車両挙動制御装置を提供することを、その目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成する為、本発明は、前後の旋回外輪の内の少なくとも一方に制動制御量を発生させることで車両の挙動を安定させる車両挙動安定化制御を行う場合、該制動制御量を前後夫々の旋回外輪に発生させる条件が成立した場合に、前後の旋回内輪の内の少なくとも一方に対して予備ブレーキ圧を印加することを特徴としている。
【0010】
ここで、予備ブレーキ圧の印加は、前記車両挙動安定化制御の実行中に今の車両の旋回動作とは逆向きの操舵操作が検知されたときに実行することが望ましい。
【0011】
前記車両挙動安定化制御がオーバーステア抑制制御の場合、前側の旋回内輪に対して前記予備ブレーキ圧の印加を行うことが望ましい。
【発明の効果】
【0012】
本発明に係る車両挙動制御装置は、切り返し操舵に伴う車両の挙動を検知する前に予備ブレーキ圧制御を行うので、運転者の切り返し操舵によって車体の旋回方向が反転する前に予備ブレーキ圧を印加しておくことができる。従って、この車両挙動制御装置に依れば、車体の旋回方向が反転して車両挙動安定化制御を行う際に、予備ブレーキ圧の印加されている新たな旋回外輪に対して車両挙動安定化制御の為の制動制御量を応答性良く発生させることができる。特に、この車両挙動制御装置は、切り返し操舵が急操舵である等の素早い予備ブレーキ圧の出力が必要とされるときにも、その予備ブレーキ圧を素早く出力させ、旋回方向反転後に応答性良く車両挙動安定化制御の為の制動制御量を出力させることができる。故に、この車両挙動制御装置は、車両挙動安定化制御の制御性能を向上させることができる。
【図面の簡単な説明】
【0013】
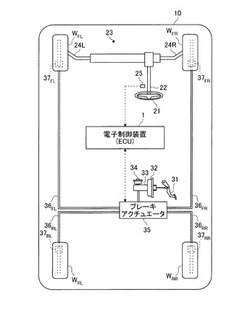
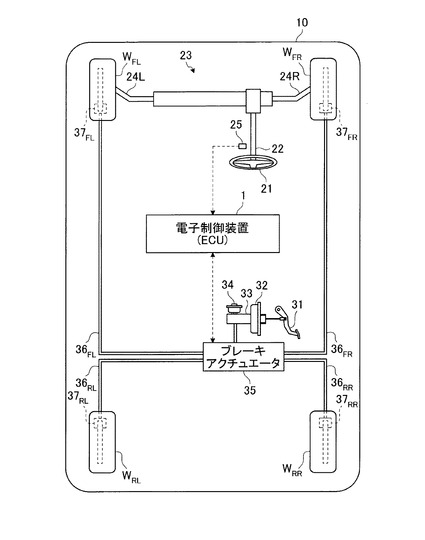
【図1】図1は、本発明に係る車両挙動制御装置の適用対象たる車両の一例を示す図である。
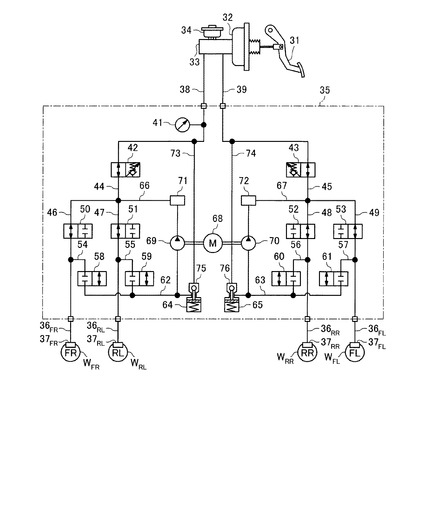
【図2】図2は、ブレーキアクチュエータの一例を示す図である。
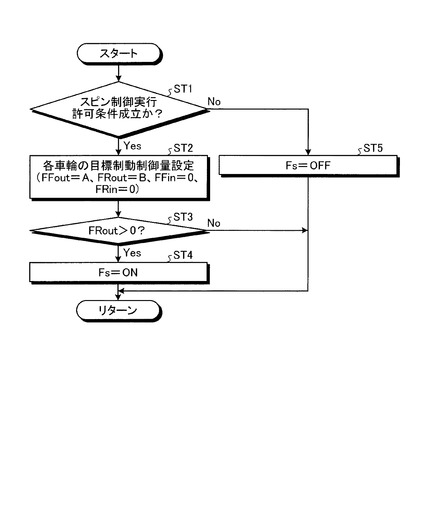
【図3】図3は、実施例の車両挙動制御装置による見込み予備ブレーキ圧制御の大まかな流れを説明するフローチャートである。
【図4】図4は、実施例の車両挙動制御装置による予備ブレーキ圧制御を説明するフローチャートである。
【図5】図5は、図4のフローチャートの続きを説明するフローチャートである。
【発明を実施するための形態】
【0014】
以下に、本発明に係る車両挙動制御装置の実施例を図面に基づいて詳細に説明する。尚、この実施例によりこの発明が限定されるものではない。
【0015】
[実施例]
本発明に係る車両挙動制御装置の実施例1を図1から図5に基づいて説明する。
【0016】
本実施例の車両挙動制御装置は、図1に示す電子制御装置(ECU)1の一機能として用意されたものとする。
【0017】
[車両]
最初に、この車両挙動制御装置が適用される車両10の一例を図1に示す。
【0018】
この車両10には、運転者の操舵操作によって操舵輪WFL,WFRを転舵させる操舵システムが用意されている。この操舵システムは、運転者が操作するステアリングホイール21と、このステアリングホイール21に連結されたステアリングシャフト22と、このステアリングシャフト22の操舵トルクを左右の操舵輪WFL,WFR側へと伝達する操舵トルク伝達装置23と、この操舵トルク伝達装置23と各操舵輪WFL,WFRとの間を連結するタイロッド24L,24Rと、運転者によるステアリングホイール21の操舵操作量を検出する操舵操作量検出装置25と、を備えている。その操舵トルク伝達装置23とは、所謂ラック&ピニオン機構のことである。
【0019】
操舵操作量とは、例えば操舵角度δのことである。操舵操作量検出装置25は、ステアリングシャフト22の回転角度から操舵角度δの検出を行い、その検出信号を電子制御装置1に送信する。操舵角度δは、ステアリングホイール21が中立位置(ステアリングセンタ)から反時計回り(左旋回方向)に操舵操作されたときに正の値として検出され、ステアリングセンタから時計回りに操舵操作されたときに負の値として検出されるものとする。その電子制御装置1においては、操舵角度δの時間経過による変化量に基づいて操舵角速度ωstrの演算を行う(ωstr=dδ/dt)。従って、その操舵角速度ωstrについては、ステアリングホイール21が反時計回りに操舵操作されたときに正の値となり、時計回りに操舵操作されたときに負の値となる。
【0020】
尚、ここではステアリングホイール21と操舵輪WFL,WFRとの間が機械的に接続されている操舵システムについて例示するが、操舵システムは、その間に機械的な接続が無い所謂ステアバイワイヤ方式のものであってもよい。
【0021】
また、この車両10には、図示しないエンジンやモータ等の動力源が設けられている。この車両10は、その動力源の動力を駆動輪に駆動力として伝達して走行する。そして、この車両10には、その走行中の車両10を停止又は減速させる制動システムが用意されている。その制動システムは、夫々の車輪WFL,WFR,WRL,WRRに対して個別の大きさで目標制動制御量(目標車輪制動トルク、目標車輪制動力)を発生させることができるよう構成されている。ここでは、ブレーキ液圧の力を利用して係合要素間に摩擦力を発生させ、これにより車輪WFL,WFR,WRL,WRRに目標制動制御量を働かせるものについて例示する。
【0022】
先ず、この制動システムは、図1及び図2に示す如く、運転者が操作するブレーキペダル31と、このブレーキペダル31に入力されたブレーキ操作に伴う操作圧力(ペダル踏力)を所定の倍力比で倍化させる制動倍力装置(ブレーキブースタ)32と、この制動倍力装置32により倍化されたペダル踏力をブレーキペダル31の操作量に応じたブレーキ液圧(以下、「マスタシリンダ圧」という。)へと変換するマスタシリンダ33と、ブレーキ液を貯留するリザーバタンク34と、を備えている。これらブレーキペダル31や制動倍力装置32等は、運転者によるブレーキペダル31の操作量に応じたブレーキ液圧を発生させる液圧発生装置として機能する。
【0023】
また、この制動システムには、図1及び図2に示す如く、マスタシリンダ圧を各車輪WFL,WFR,WRL,WRR毎に調節可能な液圧調節装置(以下、「ブレーキアクチュエータ」という。)35と、このブレーキアクチュエータ35を経たブレーキ液圧(マスタシリンダ圧又はマスタシリンダ圧を調圧したブレーキ液圧)が各々液圧配管36FL,36FR,36RL,36RRを介して供給され、夫々の車輪WFL,WFR,WRL,WRRに制動制御量(車輪制動トルク、車輪制動力)を発生させる制動装置37FL,37FR,37RL,37RRと、が設けられている。
【0024】
制動装置37FL,37FR,37RL,37RRは、車輪WFL,WFR,WRL,WRRと一体になって回転する部材に対して摩擦力を加え、これにより車輪WFL,WFR,WRL,WRRの回転を抑えて制動動作を行う摩擦ブレーキ装置であって、例えばディスクロータやキャリパ等からなる。この制動装置37FL,37FR,37RL,37RRは、ブレーキアクチュエータ35から送られてきたマスタシリンダ圧又は調圧後のブレーキ液圧に応じた大きさの制動制御量を発生させる。以下においては、そのマスタシリンダ圧によって発生する制動制御量のことを夫々「マスタ圧制動制御量」という。また、そのマスタシリンダ圧を加圧した調圧後のブレーキ液圧によって発生する制動制御量のことを夫々「加圧制動制御量」という。
【0025】
本実施例のブレーキアクチュエータ35は、右前輪WFR及び左後輪WRLに対してブレーキ液圧を伝える第1液圧系統と、左前輪WFL及び右後輪WRRに対してブレーキ液圧を伝える第2液圧系統と、を備えたものとして例示する。つまり、このブレーキアクチュエータ35は、X配管のブレーキ液圧回路を有する構造になっている。このブレーキアクチュエータ35は、電子制御装置1の制御指令に従って作動する。
【0026】
ここで、マスタシリンダ33の内部には図示しない2つの油圧室が設けられており、その夫々の油圧室に上記のマスタシリンダ圧が発生している。第1液圧系統においては、マスタシリンダ33の一方の油圧室のブレーキ液圧(マスタシリンダ圧)が第1液圧配管38を介してブレーキアクチュエータ35に供給され、このブレーキアクチュエータ35がブレーキ液圧をマスタシリンダ圧のまま又は調圧して右前輪WFR及び左後輪WRLの制動装置37FR,37RLに供給する。一方、第2液圧系統においては、他方の油圧室のブレーキ液圧(マスタシリンダ圧)が第2液圧配管39を介してブレーキアクチュエータ35に供給され、このブレーキアクチュエータ35がブレーキ液圧をマスタシリンダ圧のまま又は調圧して左前輪WFL及び右後輪WRRの制動装置37FL,37RRに供給する。
【0027】
このブレーキアクチュエータ35には、マスタシリンダ圧の検出を行うマスタシリンダ圧センサ41が設けられている。このマスタシリンダ圧センサ41は、第1又は第2の液圧配管38,39の内の何れか一方に配備され、その検出信号を電子制御装置1に送信する。ここでは、そのマスタシリンダ圧センサ41を第1液圧配管38に設けるものとして例示する。
【0028】
また、このブレーキアクチュエータ35は、第1及び第2の液圧系統に各々マスタカット弁42,43を備えている。ここでは、マスタシリンダ圧センサ41の下流にマスタカット弁42を配設する。これら各マスタカット弁42,43は、所謂常開式のブレーキ液の流量調整用電磁弁であって、非通電時に開弁状態にあり、電子制御装置1による通電に伴って弁開度の制御が実行されるものである。夫々のマスタカット弁42,43は、通電量に応じて弁開度を制御することで、後述する加圧ポンプ69,70から吐出されたブレーキ液の圧力を調節し、これをマスタシリンダ33側へ開放する。尚、この実施例にて示す下流とは、ペダル操作時のブレーキ液の流動方向(つまり、制動装置37FL,37FR,37RL,37RRへと向かう方向)における下流側のことを表すものとする。
【0029】
このブレーキアクチュエータ35においては、第1液圧配管38がマスタカット弁42を介して連結通路44に接続される一方、第2液圧配管39がマスタカット弁43を介して連結通路45に接続される。そして、第1液圧系統の連結通路44には、そこから分岐させるが如く2本の分岐通路46,47を接続し、第2液圧系統の連結通路45には、そこから分岐させるが如く2本の分岐通路48,49を接続する。第1液圧系統においては、その各々の分岐通路46,47を夫々に右前輪WFRの液圧配管36FRと左後輪WRLの液圧配管36RLに接続する。一方、第2液圧系統においては、その各々の分岐通路48,49を夫々に右後輪WRRの液圧配管36RRと左前輪WFLの液圧配管36FLに接続する。
【0030】
また、その各分岐通路46,47,48,49上には、夫々の制動装置37FL,37FR,37RL,37RR毎のブレーキ液圧を調整可能な液圧調圧装置が車輪WFL,WFR,WRL,WRR毎に配設されている。その夫々の液圧調圧装置は、車輪WFL,WFR,WRL,WRR毎に用意された保持弁50,51,52,53と液圧排出通路54,55,56,57と減圧弁58,59,60,61とで構成される。ここでは、各分岐通路46,47,48,49上に保持弁50,51,52,53が各々配備されており、更に、これら各保持弁50,51,52,53よりも下流側に液圧排出通路54,55,56,57が夫々に分岐通路46,47,48,49から分岐させるが如く接続されている。そして、その各液圧排出通路54,55,56,57上には、夫々に減圧弁58,59,60,61が配備されている。
【0031】
その夫々の保持弁50,51,52,53は、所謂常開式の電磁弁であって、非通電時に開弁状態にあり、電子制御装置1による通電に伴って閉弁させられるものである。一方、各減圧弁58,59,60,61は、所謂常閉式の電磁弁であって、非通電時に閉弁状態にあり、電子制御装置1による通電に伴って開弁させられるものである。
【0032】
また、ここでは、第1液圧系統の夫々の液圧排出通路54,55を一纏めにする液圧排出集合通路62と、第2液圧系統の夫々の液圧排出通路56,57を一纏めにする液圧排出集合通路63と、が用意されている。その夫々の液圧排出集合通路62,63は、各々補助リザーバ64,65に接続されている。
【0033】
更に、第1液圧系統においては、連結通路44と各分岐通路46,47との分岐点から分岐して液圧排出集合通路62に接続されるポンプ通路66を配設する。これと同様に、第2液圧系統においては、連結通路45と各分岐通路48,49との分岐点から分岐して液圧排出集合通路63に接続されるポンプ通路67を配設する。
【0034】
その夫々のポンプ通路66,67には、電動機68によって駆動される加圧ポンプ(加圧装置)69,70を各々配備している。これら各加圧ポンプ69,70は、夫々にマスタカット弁42,43側の各分岐点に向けてブレーキ液を吐出させるものであり、夫々に分岐通路46,47と分岐通路48,49に対して加圧されたブレーキ液圧を供給する。つまり、第1液圧系統の加圧ポンプ69は、右前輪WFRと左後輪WRLに発生させる制動力を増大させるべく、夫々の制動装置37FR,37RLに供給するブレーキ液圧の増圧を行う。一方、第2液圧系統の加圧ポンプ70は、左前輪WFLと右後輪WRRに発生させる制動力を増大させるべく、夫々の制動装置37FL,37RRに供給するブレーキ液圧の増圧を行う。尚、電動機68は、図示しないバッテリからの電力供給により駆動する。また、その各ポンプ通路66,67には、加圧ポンプ69,70から吐出された夫々のブレーキ液の脈動を回避するダンパ室71,72が配設されている。
【0035】
また、このブレーキアクチュエータ35には、第1及び第2の液圧配管38,39から各々分岐して補助リザーバ64,65に夫々接続される吸入通路73,74が配設されており、更に、その夫々の吸入通路73,74の補助リザーバ64,65側にリザーバカット逆止弁75,76が配設されている。
【0036】
このように構成した本実施例の制動システムは、その動作が上述したように電子制御装置1によって制御され、ABS(アンチロック・ブレーキ・システム)制御やVSC(ビークル・スタビリティ・コントロール)制御等を行うことができる。例えば、電子制御装置1は、運転者のブレーキペダル31の操作量や後述する車両挙動制御装置からの要求値に基づいて制御対象輪の目標制動制御量を設定する。この電子制御装置1は、マスタ圧制動制御量が目標制動制御量に対して不足していれば、その不足分を補うことが可能な制御対象輪の目標ブレーキ液圧を求める。そして、この電子制御装置1は、その目標ブレーキ液圧に基づきブレーキアクチュエータ35を制御し、マスタシリンダ圧の加圧を行って、その目標制動制御量を満足させる加圧制動制御量を制御対象輪の制動装置37FL(37FR,37RL,37RR)に発生させる。
【0037】
[車両挙動制御装置]
また、本実施例の電子制御装置1には、前述したように、その一機能として車両挙動制御装置が用意されている。この車両挙動制御装置は、旋回中の車両10の挙動を安定させる為の車両挙動安定化制御を行う。
【0038】
具体的に、この車両挙動制御装置は、旋回中にブレーキアクチュエータ35を制御し、前後の旋回外輪の内の少なくとも一方に制動制御量(車輪制動トルク、車輪制動力)を発生させることで、旋回中の車両10の挙動を安定させる。例えば、この車両挙動制御装置は、その旋回外輪に対する制動制御によって、旋回動作に伴い車体に作用しているヨーモーメントとは逆方向のヨーモーメントを車体に発生させ、旋回中の車両10に対してオーバーステアの抑制制御(所謂スピン制御)を行うことで、オーバーステア傾向を示す車体をニュートラルステアに近づける。そのスピン制御においては、前側の旋回外輪に目標制動制御量FFout0を発生させる。また、スピン制御においては、後側の旋回外輪にも目標制動制御量FRout0を発生させる場合がある。この場合には、前側の旋回外輪の目標制動制御量FFout0を後側の旋回外輪の目標制動制御量FRout0よりも大きくする。
【0039】
そのスピン制御における旋回外輪に対する制動制御は、運転者が操舵操作を行った際の車両10の旋回動作におけるロールモーメントやヨーモーメントの大きさに応じて実行される。ここで、運転者は、ステアリングセンタを起点にした1回目の操舵操作を行い、この操舵操作に続く1回目とは逆向きのステアリングセンタを超えた2回目の操舵操作を行う様に、ステアリングホイール21をステアリングセンタに対して左右交互に2回以上連続して操舵操作する切り返し操舵を行う場合がある。例えば、切り返し操舵を行う場面とは、旋回方向が左右交互に連続している旋回路を走行する場面やスラローム走行する場面等が該当する。そして、この切り返し操舵が行われると、車両10においては、切り返し操舵時の2回目以降の操舵操作が行われたときに、1回目の操舵操作時よりも車体に過大なロールモーメントとヨーモーメントが作用する可能性がある。これが為、スピン制御は、運転者がステアリングセンタを起点にした1回目の操舵操作を行ったときに実行されることもあるが、切り返し操舵時の2回目以降の操舵操作が行われたときに実行される可能性が高い。例えば、車両挙動制御装置は、その切り返し操舵によって今とは逆向きのステアリングセンタを超えた操舵操作が行われ、車体の旋回方向が逆向きになった際に、その車体に過大なロールモーメントとヨーモーメントが作用しないように制御を行う。その際には、新たな前後の旋回外輪の内の少なくとも一方に制動制御量を発生させ、そのヨーモーメントとは逆方向のヨーモーメントを車体に発生させることで、過大なロール量を抑えつつ車両10の挙動を安定させたまま旋回させることができる。
【0040】
ここで、例えば、切り返し操舵の1つ前の操舵操作におけるステアリングホイール21の操舵角度δが大きく、また、1つ前の操舵操作からの切り返し操舵の際の操舵角速度ωstrが速い場合、切り返し操舵による旋回方向の反転によって車体に作用するロールモーメントやヨーモーメントは、1つ前の操舵操作の操舵角度δが小さく、また、1つ前の操舵操作からの切り返し操舵の操舵角速度ωstrが遅い場合よりも大きくなる。そして、その操舵角度δが所定値以上で、且つ、操舵角速度ωstrが所定値以上のときには、旋回外輪の制動制御量FFoutで発生させるべきヨーモーメントが大きいので、旋回方向が反転した後の前後夫々の旋回外輪にスピン制御の為の制動制御量FFout,FRoutを発生させなければならない可能性がある。これに対して、その操舵角度δが所定値よりも小さく、且つ、操舵角速度ωstrが所定値よりも遅いときには、操舵角度δが所定値以上、且つ、操舵角速度ωstrが所定値以上のときと比べて、旋回外輪の制動制御量で発生させるべきヨーモーメントが小さいので、前側の旋回外輪だけにスピン制御の為の制動制御量FFoutを発生させればよい。尚、その夫々の所定値は、例えば車両重心位置等により変わる閾値であり、車種毎に異なる。
【0041】
このことから、この車両挙動制御装置は、旋回方向の反転と共に新たに旋回外輪となる制御対象輪が制動制御量を応答性良く発生させることができるように、旋回外輪となる以前の旋回内輪の状態で予備ブレーキ圧制御を行うことが好ましい。予備ブレーキ圧は、その制動制御量を前後夫々の旋回外輪に発生させる条件が成立した場合に、その旋回内輪の内の少なくとも前後何れか一方に印加する。
【0042】
具体的に、前後夫々の旋回外輪にスピン制御の為の制動制御量FFout,FRoutを発生させる必要がある場合には、急な切り返し操舵でも応答性良くスピン制御を行う為に、その前後夫々の旋回外輪が1つ前の操舵操作で未だ旋回内輪になっているうちに予備ブレーキ圧を加えておくことが望ましい。但し、予備ブレーキ圧制御を開始する時点では、その1つ前の操舵操作の後に行われた逆向きの操舵操作が、ステアリングセンタを超えた切り返し操舵であるのか、それとも、ステアリングセンタまでの戻し操作であるのかを正確に判別し難い。そして、スピン制御においては、概ね前側の旋回外輪にスピン制御の為の制動制御量FFoutを発生させるだけで十分車両挙動を安定させることができ、後側の旋回外輪にまでスピン制御の為の制動制御量FRoutを発生させるような過大なロールモーメントとヨーモーメントが作用する頻度は低い。これが為、制御対象輪となる頻度の低い後側の旋回外輪にまで予備ブレーキ圧を印加してしまうと、加圧ポンプ69(70)の駆動による燃費の悪化を招き好ましくない。
【0043】
そこで、本実施例においては、後側の旋回外輪にスピン制御の為の制動制御量FRoutを今現在発生させている場合、今のスピン制御と同様のスピン制御の実行が切り返し操舵に伴う旋回方向の反転時に求められる可能性があり、前後夫々の旋回外輪にスピン制御の為の制動制御量FFout,FRoutを発生させなければならない可能性もあるが、逆向きの操舵操作が切り返し操舵ではなく戻し操作であったときの燃費の悪化を鑑みて、旋回方向が反転したときに前側の旋回外輪となる今の前側の旋回内輪のみに予備ブレーキ圧を印加する。つまり、本実施例の車両挙動制御装置は、後側の旋回外輪にスピン制御の為の制動制御量FRoutを発生させたときに、この後車体の旋回方向が実際に反転するのか否か不明であるが、燃費の悪化を考慮しつつ切り返し操舵により旋回方向が反転すると見込んで、今の前側の旋回内輪に予備ブレーキ圧制御を開始する。その旋回方向が反転するとの見込みは、運転者の切り返し操舵、つまり逆向きの操舵操作を契機にして行う。
【0044】
その予備ブレーキ圧(以下、「見込み予備ブレーキ圧」ともいう。)とは、例えば制御対象輪の回転速度を明らかに低下させることのないブレーキ液圧、換言するならばそれ以上大きなブレーキ液圧を加えたときにそのブレーキ液圧に応じた制動制御量を応答性良く発生させることのできるブレーキ液圧のことである。この見込み予備ブレーキ圧は、ブレーキアクチュエータ35を制御することによって出力させる。
【0045】
例えば、車両挙動制御装置は、図3のフローチャートに示すように、先ず、スピン制御の実行許可条件が成立しているのか否かを判定する(ステップST1)。この判定は、オーバーステアを抑える制御の実行が必要なのか否かを決めるものであり、この制御における周知の実行許可条件に当て嵌めて行えばよい。例えば、車両挙動制御装置は、ヨーモーメントが所定の閾値よりも大きいときに、スピン制御の実行許可条件が成立していると判定する。
【0046】
車両挙動制御装置は、スピン制御の実行許可条件が成立していれば、スピン制御の為の各車輪WFL,WFR,WRL,WRRの目標制動制御量(目標車輪制動トルク、目標車輪制動力)を設定する(ステップST2)。スピン制御においては、前述したように、前後の旋回外輪の内の少なくとも一方に制動力を発生させるので、制動力を発生させる制御対象輪(前後の旋回外輪の内の少なくとも一方)の目標制動制御量を正の値に設定し、制動力を発生させない前後の旋回内輪の目標制動制御量を0に設定する。ここでは、前側の旋回外輪の目標制動制御量FFout0をA(>0)、後側の旋回外輪の目標制動制御量FRout0をB(>0)、前側の旋回内輪の目標制動制御量FFin0を0、後側の旋回内輪の目標制動制御量FRin0を0に設定している。
【0047】
車両挙動制御装置は、スピン制御の実行に伴い後側の旋回外輪にも制動制御量FRoutを発生させているのか否かを判定する(FRout>0?)(ステップST3)。ここでは後側の旋回外輪の目標制動制御量FRout0をB(>0)に設定しているので、車両挙動制御装置は、制動制御量FRoutの発生と共に、予備ブレーキ圧制御開始フラグFsを立てる(Fs=ON)(ステップST4)。これにより、車両挙動制御装置は、次に旋回外輪となる可能性のある前側の旋回内輪に見込み予備ブレーキ圧を加える。
【0048】
一方、この車両挙動制御装置は、後側の旋回外輪に制動制御量FRoutを発生させていなければ、予備ブレーキ圧制御開始フラグFsを降ろす(Fs=OFF)(ステップST5)。
【0049】
以下、この予備ブレーキ圧制御の具体例について説明する。
【0050】
車両挙動制御装置は、予備ブレーキ圧制御モードMを見込み予備ブレーキ圧制御モードM1又は通常予備ブレーキ圧制御モードM3に設定し、その何れかの制御モードでの予備ブレーキ圧制御を実行する。更に、この車両挙動制御装置は、見込み予備ブレーキ圧制御モードM1での見込み予備ブレーキ圧を印加させないときに、予備ブレーキ圧制御モードMを予備ブレーキ圧オフモードM1offに設定する。また、この車両挙動制御装置は、通常予備ブレーキ圧制御モードM3での予備ブレーキ圧(以下、「通常予備ブレーキ圧」ともいう。)を印加させないときに、予備ブレーキ圧制御モードMを予備ブレーキ圧オフモードM3offに設定する。
【0051】
その見込み予備ブレーキ圧制御モードM1とは、先に図3のフローチャートを用いて説明した見込み予備ブレーキ圧の制御モードのことであり、特に素早い切り返し操舵が行われた際の予備ブレーキ圧制御やスピン制御の制御応答性を高める為のものである。従って、この見込み予備ブレーキ圧制御モードM1においては、見込み予備ブレーキ圧の加わっている状態でブレーキ液圧を上昇させた際に、直ぐに制動制御量が発生するように、見込み予備ブレーキ圧の大きさが設定されている。この見込み予備ブレーキ圧制御モードM1では、後側の旋回外輪にスピン制御の為の制動制御量FRoutが発生しているときで、且つ、切り返し操舵が行われていると見込まれたときに、その制動制御量FRoutの出力と共に前側の旋回内輪に見込み予備ブレーキ圧を加える。但し、その見込みの切り返し操舵には、素早い切り返し操舵だけでなく、これよりもゆっくりと行われる切り返し操舵も含まれている。
【0052】
この見込み予備ブレーキ圧制御モードM1としては、右前輪WFRの制動装置37FRに見込み予備ブレーキ圧を印加する見込み右前輪制御モードM1FRと、左前輪WFLの制動装置37FLに見込み予備ブレーキ圧を印加する見込み左前輪制御モードM1FLと、が用意されている。
【0053】
この車両挙動制御装置は、見込み右前輪制御モードM1FRを設定した際に、ブレーキアクチュエータ35を制御して右前輪WFRに見込み予備ブレーキ圧を印加する。その際、車両挙動制御装置は、ブレーキアクチュエータ35において、右前輪WFRに係るマスタカット弁42と減圧弁58を閉弁させると共に保持弁50を開弁させ、且つ、見込み予備ブレーキ圧が右前輪WFRの制動装置37FRに加わるように電動機68と加圧ポンプ69を駆動させる。その際のブレーキアクチュエータ35は、他の車輪WFL,WRL,WRRに係るマスタカット弁43と保持弁51,52,53と減圧弁59,60,61が閉弁され、他の車輪WFL,WRL,WRRに制動制御量が働かない(つまり見込み予備ブレーキ圧が加わらない)ように制御されている。
【0054】
また、この車両挙動制御装置は、見込み左前輪制御モードM1FLを設定した際に、ブレーキアクチュエータ35を制御して左前輪WFLに見込み予備ブレーキ圧を印加する。その際、車両挙動制御装置は、ブレーキアクチュエータ35において、左前輪WFLに係るマスタカット弁43と減圧弁61を閉弁させると共に保持弁53を開弁させ、且つ、見込み予備ブレーキ圧が左前輪WFLの制動力発生手段37FLに加わるように電動機68と加圧ポンプ70を駆動させる。その際のブレーキアクチュエータ35は、他の車輪WFR,WRL,WRRに係るマスタカット弁42と保持弁50,51,52と減圧弁58,59,60が閉弁され、他の車輪WFR,WRL,WRRに制動力が働かない(見込み予備ブレーキ圧が加わらない)ように制御されている。
【0055】
一方、通常予備ブレーキ圧制御モードM3とは、従来の予備ブレーキ圧の制御モードに相当するものであり、例えば見込み予備ブレーキ圧制御モードM1で発生させる見込み予備ブレーキ圧よりも低い予備ブレーキ圧を印加することのできる制御モードである。この通常予備ブレーキ圧制御モードM3には、マスタ弁閉じモードM3aとモータ駆動モードM3bとが用意されている。
【0056】
マスタ弁閉じモードM3aは、通常予備ブレーキ圧を印加する制御対象輪のマスタカット弁42(43)と減圧弁58(59,60,61)を閉弁すると共に、その制御対象輪の保持弁50(51,52,53)を開弁し、且つ、電動機68と加圧ポンプ70を駆動させることで、その制御対象輪に通常予備ブレーキ圧を加えるモードのことである。
【0057】
モータ駆動モードM3bは、そのマスタ弁閉じモードM3aに対して制御対象輪のマスタカット弁42(43)を開弁させたものであり、マスタ弁閉じモードM3aよりも弱い通常予備ブレーキ圧を発生させる。
【0058】
また、この車両挙動制御装置は、予備ブレーキ圧オフモードM1off,M3offを設定した際に、ブレーキアクチュエータ35を制御して各車輪WFL,WFR,WRL,WRRに制動力が働かない(予備ブレーキ圧が加わらない)ようにする。その際、車両挙動制御装置は、ブレーキアクチュエータ35において、少なくとも電動機68と加圧ポンプ69,70を駆動させないように制御する。
【0059】
以下、本実施例の車両挙動制御装置の演算処理動作(予備ブレーキ圧制御)の具体例を図4及び図5のフローチャートに基づいて詳述する。
【0060】
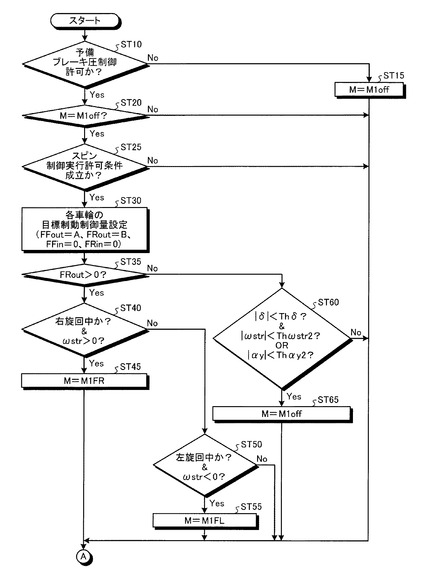
先ず、図4のフローチャートに示す如く、車両挙動制御装置は、予備ブレーキ圧制御の実行を許可して良いのか否かの判断を行う(ステップST10)。このステップST10の判断は、予備ブレーキ圧制御の実行に支障があるのか否かを観るものである。例えば、このステップST10においては、非制動中であり、且つ、ABS制御やVSC制御等に必要な制動システムやセンサが正常に機能しているときに「予備ブレーキ圧制御の実行を許可する」との判断を行う。
【0061】
車両挙動制御装置は、予備ブレーキ圧制御の実行が許可されていなければ、予備ブレーキ圧制御モードMを予備ブレーキ圧オフモードM1offに設定する(ステップST15)。一方、この車両挙動制御装置は、予備ブレーキ圧制御の実行が許可されていれば、予備ブレーキ圧制御モードMが予備ブレーキ圧オフモードM1offに設定されているのか否かを判定する(ステップST20)。尚、初期状態(イグニッションONの後で一度も予備ブレーキ圧制御が実行されていない状態)においては、予備ブレーキ圧制御モードMが予備ブレーキ圧オフモードM1offに設定されているものとする。
【0062】
車両挙動制御装置は、予備ブレーキ圧オフモードM1offに設定されていない場合、後述するステップST70に進む。これに対して、この車両挙動制御装置は、予備ブレーキ圧オフモードM1offが設定されている場合、前述したステップST1と同様に、スピン制御の実行許可条件が成立しているのか否かを判定する(ステップST25)。
【0063】
車両挙動制御装置は、スピン制御の実行許可条件が成立していなければ、後述するステップST70に進む。これに対して、この車両挙動制御装置は、スピン制御の実行許可条件が成立していれば、前述したステップST2と同様に、スピン制御の為の各車輪WFL,WFR,WRL,WRRの目標制動制御量を設定する(ステップST30)。そして、この車両挙動制御装置は、そのスピン制御の実行に伴って、後側の旋回外輪に制動制御量FRoutを発生させているのか否かを判定する(FRout>0?)(ステップST35)。
【0064】
車両挙動制御装置は、その制動制御量FRoutを発生させていれば、車両10が右旋回中で、且つ、その際の操舵角速度ωstrが正の値なのか否か、つまり右旋回中に逆方向(反時計回りの方向)にステアリングホイール21が操舵操作されたのか否かの判定を行う(ステップST40)。
【0065】
そして、右旋回中で且つ操舵角速度ωstrが正の値の場合、この車両挙動制御装置は、予備ブレーキ圧制御モードMを見込み右前輪制御モードM1FRに設定し、今の前側の旋回内輪である右前輪WFRに見込み予備ブレーキ圧を印加する(ステップST45)。即ち、車両挙動制御装置は、右旋回中に当該旋回方向とは逆向きの操舵操作が為された場合、その逆向きの操舵操作がステアリングセンタへの戻し操作であるのかステアリングセンタを超える切り返し操舵であるのか判別し難いが、切り返し操舵であると見込んで、その切り返し操舵による旋回方向の反転に伴い次の前側の旋回外輪になる右前輪WFRに見込み予備ブレーキ圧を加える。車両挙動制御装置は、この後、後述するステップST70に進む。
【0066】
これに対して、右旋回中で且つ操舵角速度ωstrが正の値でない場合、この車両挙動制御装置は、車両10が左旋回中で、且つ、その際の操舵角速度ωstrが負の値なのか否か、つまり左旋回中に逆方向(時計回りの方向)にステアリングホイール21が操舵操作されたのか否かを判定する(ステップST50)。
【0067】
この車両挙動制御装置は、左旋回中で且つ操舵角速度ωstrが負の値の場合、予備ブレーキ圧制御モードMを見込み左前輪制御モードM1FLに設定し、今の前側の旋回内輪である左前輪WFLに見込み予備ブレーキ圧を印加する(ステップST55)。即ち、車両挙動制御装置は、左旋回中に当該旋回方向とは逆向きの操舵操作が為された場合、ここでも、その逆向きの操舵操作がステアリングセンタへの戻し操作であるのかステアリングセンタを超える切り返し操舵であるのか判別し難いが、切り返し操舵であると見込んで、その切り返し操舵による旋回方向の反転に伴い次の前側の旋回外輪になる左前輪WFLに見込み予備ブレーキ圧を加える。車両挙動制御装置は、この後、後述するステップST70に進む。
【0068】
そのステップST50で否定判定された場合、運転者が切り返し操舵を行っていないことは明らかなので、車両挙動制御装置は、後述するステップST70に進む。
【0069】
一方、後側の旋回外輪にスピン制御の為の制動制御量FRoutが発生していない場合、車両挙動制御装置は、検出された操舵角度δの絶対値が所定の閾値Thδ(>0)よりも小さく、且つ算出された操舵角速度ωstrの絶対値が所定の閾値Thωstr2(>0)よりも小さいのか、それとも算出されたヨー角加速度αyの絶対値が所定の閾値Thαy2(>0)よりも小さいのかについて判定する(ステップST60)。このステップST60においては、操舵角度δの絶対値が所定の閾値Thδよりも小さく且つ操舵角速度ωstrの絶対値が所定の閾値Thωstr2よりも小さいとき、又は操舵角度δの絶対値が所定の閾値Thδよりも小さく且つヨー角加速度αyの絶対値が所定の閾値Thαy2よりも小さいときに肯定判定が為され、それ以外のときに否定判定が為される。
【0070】
このステップST60で肯定判定されたときには、ステアリングセンタへのステアリングホイール21の戻し操作であると判断させる。これが為、このときの車両挙動制御装置は、予備ブレーキ圧制御モードMを予備ブレーキ圧オフモードM1offに設定し(ステップST65)、後述するステップST70に進む。これに対して、ステップST60で否定判定されたときには、例えば操舵角速度ωstrが速く、切り返し操舵が行われる可能性もあるので、予備ブレーキ圧オフモードM1offを設定せずに、ステップST70に進む。
【0071】
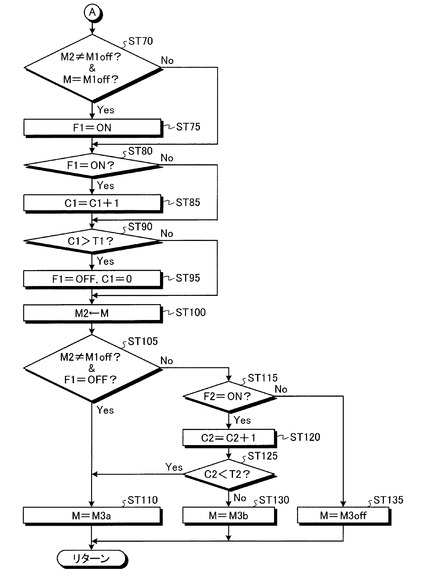
車両挙動制御装置は、図4のフローチャートにおける演算処理を終えた後、図5のフローチャートに示す如く、前回の予備ブレーキ圧制御モードM2が予備ブレーキ圧オフモードM1offではなく、且つ、今回の予備ブレーキ圧制御モードMが予備ブレーキ圧オフモードM1offであるのかの判定を行う(ステップST70)。このステップST70では、前回の予備ブレーキ圧制御モードM2が見込み右前輪制御モードM1FR又は見込み左前輪制御モードM1FLであり、且つ、今回の予備ブレーキ圧制御モードMが予備ブレーキ圧オフモードM1offであれば、肯定判定を行い、それ以外であれば、否定判定を行う。例えば、このステップST70においては、見込み予備ブレーキ圧制御モードM1の設定が1度目のとき(つまり前回の予備ブレーキ圧制御モードM2が決まっていないとき)や、見込み予備ブレーキ圧制御の継続中(前回の予備ブレーキ圧制御モードM2も今回の予備ブレーキ圧制御モードMも見込み予備ブレーキ圧制御モードM1であるとき)に否定判定が為される。
【0072】
このステップST70において肯定判定された場合とは、見込み予備ブレーキ圧制御が1回実行され、その次の操舵操作がステアリングセンタへのステアリングホイール21の戻し操作と判断可能な場合である。これが為、車両挙動制御装置は、前回の予備ブレーキ圧制御モードM2が予備ブレーキ圧オフモードM1offではなく、且つ、今回の予備ブレーキ圧制御モードMが予備ブレーキ圧オフモードM1offである場合、見込み予備ブレーキ圧制御1回作動フラグ(以下、「見込み作動フラグ」という。)F1を立てる(F1=ON)(ステップST75)。その見込み作動フラグF1とは、見込み予備ブレーキ圧制御の実行が1回終わったことを表すものである。
【0073】
続いて、この車両挙動制御装置は、上記ステップST70で否定判定した後又は上記ステップST75で見込み作動フラグF1を立てた後、見込み作動フラグF1が立っているのか否かの判定を行う(ステップST80)。このステップST80では、上記ステップST75を経ていれば肯定判定が為され、上記ステップST70で否定判定された場合、例えば見込み右前輪制御モードM1FR又は見込み左前輪制御モードM1FLが設定されているならば、否定判定が為される。
【0074】
車両挙動制御装置は、見込み作動フラグF1が立っている場合、その見込み作動フラグF1の立っている時間(以下、「見込み作動フラグ経過時間」という。)C1をカウントする(C1=C1+1)(ステップST85)。
【0075】
続いて、この車両挙動制御装置は、上記ステップST80で否定判定した後又は上記ステップST85で見込み作動フラグ経過時間C1をカウントした後、見込み作動フラグ経過時間C1が所定時間T1を超えたのか否かについての判定を行う(ステップST90)。その所定時間T1とは、見込み予備ブレーキ圧制御の実行を禁止する最大の時間である。つまり、このステップST90の判定は、見込み予備ブレーキ圧制御が1回実行され、その次にステアリングセンタへのステアリングホイール21の戻し操作が行われた場合に、見込み作動フラグ経過時間C1が所定時間T1を超えるまで見込み予備ブレーキ圧制御の実行を禁止させる為のものである。このステップST90では、上記ステップST85でカウントされた見込み作動フラグ経過時間C1が所定時間T1を超えていないときだけでなく、上記ステップST80で見込み作動フラグF1が立っていないと判定されたとき、例えば予備ブレーキ圧制御モードMが見込み右前輪制御モードM1FR又は見込み左前輪制御モードM1FLに設定されているときにも否定判定が為される。
【0076】
車両挙動制御装置は、見込み作動フラグ経過時間C1が所定時間T1を超えた場合、見込み作動フラグF1を下ろす(F1=OFF)と共に見込み作動フラグ経過時間C1をリセットする(C1=0)(ステップST95)。これにより、ステアリングセンタへのステアリングホイール21の戻し操作の後で切り返し操舵が再び行われたときに、一定時間(=所定時間T1)禁止させていた見込み予備ブレーキ圧制御を再度実行させることができる。
【0077】
続いて、車両挙動制御装置は、上記ステップST90で否定判定された後又は上記ステップST95を経た後、前回の予備ブレーキ圧制御モードM2として今回の予備ブレーキ圧制御モードMを当てはめる(M2←M)(ステップST100)。
【0078】
そして、この車両挙動制御装置は、その新たに設定した前回の予備ブレーキ圧制御モードM2が予備ブレーキ圧オフモードM1offではなく、且つ、見込み作動フラグF1が下ろされているのかの判定を行う(ステップST105)。
【0079】
車両挙動制御装置は、前回の予備ブレーキ圧制御モードM2が予備ブレーキ圧オフモードM1offで、且つ、見込み作動フラグF1が下ろされている場合、予備ブレーキ圧制御モードMをマスタ弁閉じモードM3aに設定し、今の前後の旋回内輪の内の少なくとも一方にマスタ弁閉じモードM3aによる通常予備ブレーキ圧を印加する(ステップST110)。
【0080】
これに対して、ステップST105で否定判定を行った場合、車両挙動制御装置は、通常予備ブレーキ圧制御1回作動フラグ(以下、「通常作動フラグ」という。)F2が立っているのか否かの判定を行う(ステップST115)。その通常作動フラグF2とは、通常予備ブレーキ圧制御の実行が1回終わったことを表すものであり、例えば通常予備ブレーキ圧制御を終えた時点で立てられる。
【0081】
車両挙動制御装置は、通常作動フラグF2が立っている場合、その通常作動フラグF2の立っている時間(以下、「通常作動フラグ経過時間」という。)C2をカウントする(C2=C2+1)(ステップST120)。そして、この車両挙動制御装置は、その通常作動フラグ経過時間C2が所定時間T2よりも短いのか否かについての判定を行う(ステップST125)。その所定時間T2とは、通常予備ブレーキ圧制御の実行を継続させる最大の時間である。
【0082】
車両挙動制御装置は、通常作動フラグ経過時間C2が所定時間T2よりも短い場合、ステップST110に進み、通常予備ブレーキ圧制御モードM3の中でも高い通常予備ブレーキ圧の印加が可能なマスタ弁閉じモードM3aに予備ブレーキ圧制御モードMを設定し、今の前後の旋回内輪の内の少なくとも一方にマスタ弁閉じモードM3aによる通常予備ブレーキ圧を印加する。
【0083】
これに対して、車両挙動制御装置は、通常作動フラグ経過時間C2が所定時間T2以上になった場合、マスタ弁閉じモードM3aよりも通常予備ブレーキ圧が低いモータ駆動モードM3bに予備ブレーキ圧制御モードMを設定し、今の前後の旋回内輪の内の少なくとも一方にモータ駆動モードM3bによる通常予備ブレーキ圧を印加する(ステップST130)。
【0084】
一方、車両挙動制御装置は、通常作動フラグF2が立っていない場合、予備ブレーキ圧制御モードMを予備ブレーキ圧オフモードM3offに設定する(ステップST135)。
【0085】
この車両挙動制御装置は、今とは逆向きのステアリングセンタを超えた操舵操作を運転者が行って、車体の旋回方向が反転した場合に、スピン制御が必要な車両の挙動であれば、予備ブレーキ圧の加わっている新たな旋回外輪にスピン制御の為の目標制動制御量を応答性良く発生させることができる。特に、この車両挙動制御装置においては、今の旋回動作におけるスピン制御の為の後側の旋回外輪の制動制御の開始と共に、旋回方向の反転によって次に旋回外輪となる可能性のある前側の旋回内輪に見込み予備ブレーキ圧を印加する。つまり、この車両挙動制御装置においては、車体の旋回方向が実際に反転する前に、その前側の旋回内輪に対して見込み予備ブレーキ圧を加えておくことができる。故に、この車両挙動制御装置に依れば、その今の旋回状態からの切り返し操舵が急操舵等の素早い予備ブレーキ圧の出力が必要とされるものであっても、車体が次の逆向きの旋回動作に移る前に素早く予備ブレーキ圧を印加できる。従って、この車両挙動制御装置に依れば、旋回方向反転後の新たな前側の旋回外輪に応答性良く目標制動制御量を発生させることができるので、スピン制御の制御性能を向上させることができる。
【0086】
更に、この車両挙動制御装置においては、運転者の逆方向の操舵操作に伴う車両の挙動を観ず、その逆方向の操舵操作がステアリングセンタを超える切り返し操舵であるのかステアリングセンタまでの戻し操作であるのかが明らかでない状態で、前側の旋回内輪に見込み予備ブレーキ圧制御を行うので、その見込み予備ブレーキ圧制御が不要な場合もある。しかしながら、スピン制御においては、例えば運転者の逆方向の操舵操作の操作量(操舵角速度等)が切り返し操舵に該当しないものであることが判った場合、スピン制御の為に後側の旋回外輪に発生させていた制動制御量FRoutを0にする。従って、この場合には、上記ステップST35で「NO」となり、また、上記ステップST60で「YES」となるので、予備ブレーキ圧制御モードMが予備ブレーキ圧オフモードM1offに設定され、前側の旋回内輪への見込み予備ブレーキ圧制御が中止される。故に、この車両挙動制御装置に依れば、見込み予備ブレーキ圧制御が不要な場合、見込み予備ブレーキ圧の印加後すぐに見込み予備ブレーキ圧制御が中止になり、不要な見込み予備ブレーキ圧制御を短時間で終わらせることができるので、見込み予備ブレーキ圧制御を要するときの上記の制御応答性を確保しつつ、不要なときの例えば燃費の悪化等を低く抑えることができる。
【0087】
また、この車両挙動制御装置においては、後側の旋回外輪にスピン制御の為の制動制御量を発生させる頻度が低いので、旋回方向反転前の後側の旋回内輪に見込み予備ブレーキ圧制御を行わず、前側の旋回内輪にのみ見込み予備ブレーキ圧制御を行う。従って、この車両挙動制御装置に依れば、不要な見込み予備ブレーキ圧制御の為のブレーキアクチュエータ35の作動頻度の増加を抑えることができる。尚、後側の旋回外輪に対してスピン制御の為の制動制御量を発生させる頻度が高い場合には、前後の旋回内輪に対して各々見込み予備ブレーキ圧制御を行ってもよい。
【符号の説明】
【0088】
1 電子制御装置(ECU)
10 車両
21 ステアリングホイール
25 操舵操作量検出装置
35 ブレーキアクチュエータ
37FL,37FR,37RL,37RR 制動装置
WFL,WFR,WRL,WRR 車輪
【技術分野】
【0001】
本発明は、ステアリングホイールがステアリングセンタに対して左右交互に連続して操舵操作(切り返し操舵)された際の車両の挙動を安定させる車両挙動制御装置に関する。
【背景技術】
【0002】
車体は、操舵操作が行われて旋回動作に移ると、旋回外輪側のサスペンションが沈み込んでロール運動を始める。一般に、切り返し操舵が行われた場合、ロール量は、ステアリングセンタからの1回目の操舵操作時と比べて、2回目以降の操舵操作時の方が大きくなる傾向にある。これは、例えば切り返し操舵で2回目の操舵操作が行われることによって、1回目の操舵操作で沈み込んでいるサスペンションに戻り方向(つまり伸び方向)の力が発生すると共に横加速度が素早く逆方向へと切り替わり、1回目の操舵操作によるロール運動が逆方向のロール運動へと一気に移り変わってロールモーメントを大きくするからである。その際には、ヨー運動についても2回目の操舵操作に呼応して逆方向へと一気に移り変わり、1回目の操舵操作が為されたときよりも大きなヨーモーメントが車体に作用する。
【0003】
従来、そのような2回目以降の操舵操作が行われたときに発生するヨーモーメントが過大である場合に、そのヨーモーメントを軽減させるべく逆方向のヨーモーメントを車体に作用させ、過大なロール量(ロールモーメント)を抑えつつ車両の挙動を安定した状態のままに保たせ続ける車両挙動制御装置が知られている。この車両挙動制御装置は、ブレーキアクチュエータを制御し、その逆方向のヨーモーメントを旋回外輪の内の少なくとも一方に加えた制動力によって発生させる。その際、この車両挙動制御装置は、次の逆向きの操舵操作によって新たに旋回外輪となる今現在旋回内輪になっている前後の車輪の内の少なくとも一方に予めブレーキ液圧(以下、「予備ブレーキ圧」という。)を印加しておき、その車輪が実際に旋回外輪となって制動力の発生を必要とするときに応答性良く制動力を加えることができるように制御する。その予備ブレーキ圧は、ブレーキアクチュエータを制御して発生させる。以下、その予備ブレーキ圧を加える制御のことを「予備ブレーキ圧制御」という。
【0004】
例えば、下記の特許文献1及び2には、この種の車両挙動制御装置について開示されている。この特許文献1の車両挙動制御装置は、旋回外輪の内の少なくとも一方に制動力を発生させることでオーバーステアの抑制制御を行うものであり、この抑制制御中に反旋回方向への操舵操作が検知された場合、その操舵操作に伴い次に旋回外輪となる今の旋回内輪の内の少なくとも一方に予備ブレーキ圧を加えている。また、特許文献2の車両挙動制御装置は、挙動制御輪の自動ブレーキにより車両水平面挙動制御を行うものであり、現在の挙動制御輪及びヨーレート偏差の変化傾向の組合せに応じて次の挙動制御輪を予測し、この車輪のみを予備ブレーキ圧を加える予圧制御対象輪とするものである。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−254724号公報
【特許文献2】特開平11−227586号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
予備ブレーキ圧制御は、実際の車両の挙動や運転者の切り返し操舵の検知を契機にして実施する方法でも一定の効果を得ることができる。しかしながら、急な切り返し操舵が行われる状況等においては、予備ブレーキ圧制御の出力が間に合わず又は出力不足となり、十分な効果を得られない可能性がある。
【0007】
また、そのような検知された実際の車両の挙動や運転者の切り返し操舵に基づく予備ブレーキ圧制御では、閾値の設定によって応答性を確保することも可能ではあるが、実際の車両の挙動等の誤判定による不要な作動を招く虞がある。
【0008】
そこで、本発明は、かかる従来例の有する不都合を改善し、急操舵等の素早い予備ブレーキ圧の出力が必要とされるときにも応答性良く予備ブレーキ圧を印加できる車両挙動制御装置を提供することを、その目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成する為、本発明は、前後の旋回外輪の内の少なくとも一方に制動制御量を発生させることで車両の挙動を安定させる車両挙動安定化制御を行う場合、該制動制御量を前後夫々の旋回外輪に発生させる条件が成立した場合に、前後の旋回内輪の内の少なくとも一方に対して予備ブレーキ圧を印加することを特徴としている。
【0010】
ここで、予備ブレーキ圧の印加は、前記車両挙動安定化制御の実行中に今の車両の旋回動作とは逆向きの操舵操作が検知されたときに実行することが望ましい。
【0011】
前記車両挙動安定化制御がオーバーステア抑制制御の場合、前側の旋回内輪に対して前記予備ブレーキ圧の印加を行うことが望ましい。
【発明の効果】
【0012】
本発明に係る車両挙動制御装置は、切り返し操舵に伴う車両の挙動を検知する前に予備ブレーキ圧制御を行うので、運転者の切り返し操舵によって車体の旋回方向が反転する前に予備ブレーキ圧を印加しておくことができる。従って、この車両挙動制御装置に依れば、車体の旋回方向が反転して車両挙動安定化制御を行う際に、予備ブレーキ圧の印加されている新たな旋回外輪に対して車両挙動安定化制御の為の制動制御量を応答性良く発生させることができる。特に、この車両挙動制御装置は、切り返し操舵が急操舵である等の素早い予備ブレーキ圧の出力が必要とされるときにも、その予備ブレーキ圧を素早く出力させ、旋回方向反転後に応答性良く車両挙動安定化制御の為の制動制御量を出力させることができる。故に、この車両挙動制御装置は、車両挙動安定化制御の制御性能を向上させることができる。
【図面の簡単な説明】
【0013】
【図1】図1は、本発明に係る車両挙動制御装置の適用対象たる車両の一例を示す図である。
【図2】図2は、ブレーキアクチュエータの一例を示す図である。
【図3】図3は、実施例の車両挙動制御装置による見込み予備ブレーキ圧制御の大まかな流れを説明するフローチャートである。
【図4】図4は、実施例の車両挙動制御装置による予備ブレーキ圧制御を説明するフローチャートである。
【図5】図5は、図4のフローチャートの続きを説明するフローチャートである。
【発明を実施するための形態】
【0014】
以下に、本発明に係る車両挙動制御装置の実施例を図面に基づいて詳細に説明する。尚、この実施例によりこの発明が限定されるものではない。
【0015】
[実施例]
本発明に係る車両挙動制御装置の実施例1を図1から図5に基づいて説明する。
【0016】
本実施例の車両挙動制御装置は、図1に示す電子制御装置(ECU)1の一機能として用意されたものとする。
【0017】
[車両]
最初に、この車両挙動制御装置が適用される車両10の一例を図1に示す。
【0018】
この車両10には、運転者の操舵操作によって操舵輪WFL,WFRを転舵させる操舵システムが用意されている。この操舵システムは、運転者が操作するステアリングホイール21と、このステアリングホイール21に連結されたステアリングシャフト22と、このステアリングシャフト22の操舵トルクを左右の操舵輪WFL,WFR側へと伝達する操舵トルク伝達装置23と、この操舵トルク伝達装置23と各操舵輪WFL,WFRとの間を連結するタイロッド24L,24Rと、運転者によるステアリングホイール21の操舵操作量を検出する操舵操作量検出装置25と、を備えている。その操舵トルク伝達装置23とは、所謂ラック&ピニオン機構のことである。
【0019】
操舵操作量とは、例えば操舵角度δのことである。操舵操作量検出装置25は、ステアリングシャフト22の回転角度から操舵角度δの検出を行い、その検出信号を電子制御装置1に送信する。操舵角度δは、ステアリングホイール21が中立位置(ステアリングセンタ)から反時計回り(左旋回方向)に操舵操作されたときに正の値として検出され、ステアリングセンタから時計回りに操舵操作されたときに負の値として検出されるものとする。その電子制御装置1においては、操舵角度δの時間経過による変化量に基づいて操舵角速度ωstrの演算を行う(ωstr=dδ/dt)。従って、その操舵角速度ωstrについては、ステアリングホイール21が反時計回りに操舵操作されたときに正の値となり、時計回りに操舵操作されたときに負の値となる。
【0020】
尚、ここではステアリングホイール21と操舵輪WFL,WFRとの間が機械的に接続されている操舵システムについて例示するが、操舵システムは、その間に機械的な接続が無い所謂ステアバイワイヤ方式のものであってもよい。
【0021】
また、この車両10には、図示しないエンジンやモータ等の動力源が設けられている。この車両10は、その動力源の動力を駆動輪に駆動力として伝達して走行する。そして、この車両10には、その走行中の車両10を停止又は減速させる制動システムが用意されている。その制動システムは、夫々の車輪WFL,WFR,WRL,WRRに対して個別の大きさで目標制動制御量(目標車輪制動トルク、目標車輪制動力)を発生させることができるよう構成されている。ここでは、ブレーキ液圧の力を利用して係合要素間に摩擦力を発生させ、これにより車輪WFL,WFR,WRL,WRRに目標制動制御量を働かせるものについて例示する。
【0022】
先ず、この制動システムは、図1及び図2に示す如く、運転者が操作するブレーキペダル31と、このブレーキペダル31に入力されたブレーキ操作に伴う操作圧力(ペダル踏力)を所定の倍力比で倍化させる制動倍力装置(ブレーキブースタ)32と、この制動倍力装置32により倍化されたペダル踏力をブレーキペダル31の操作量に応じたブレーキ液圧(以下、「マスタシリンダ圧」という。)へと変換するマスタシリンダ33と、ブレーキ液を貯留するリザーバタンク34と、を備えている。これらブレーキペダル31や制動倍力装置32等は、運転者によるブレーキペダル31の操作量に応じたブレーキ液圧を発生させる液圧発生装置として機能する。
【0023】
また、この制動システムには、図1及び図2に示す如く、マスタシリンダ圧を各車輪WFL,WFR,WRL,WRR毎に調節可能な液圧調節装置(以下、「ブレーキアクチュエータ」という。)35と、このブレーキアクチュエータ35を経たブレーキ液圧(マスタシリンダ圧又はマスタシリンダ圧を調圧したブレーキ液圧)が各々液圧配管36FL,36FR,36RL,36RRを介して供給され、夫々の車輪WFL,WFR,WRL,WRRに制動制御量(車輪制動トルク、車輪制動力)を発生させる制動装置37FL,37FR,37RL,37RRと、が設けられている。
【0024】
制動装置37FL,37FR,37RL,37RRは、車輪WFL,WFR,WRL,WRRと一体になって回転する部材に対して摩擦力を加え、これにより車輪WFL,WFR,WRL,WRRの回転を抑えて制動動作を行う摩擦ブレーキ装置であって、例えばディスクロータやキャリパ等からなる。この制動装置37FL,37FR,37RL,37RRは、ブレーキアクチュエータ35から送られてきたマスタシリンダ圧又は調圧後のブレーキ液圧に応じた大きさの制動制御量を発生させる。以下においては、そのマスタシリンダ圧によって発生する制動制御量のことを夫々「マスタ圧制動制御量」という。また、そのマスタシリンダ圧を加圧した調圧後のブレーキ液圧によって発生する制動制御量のことを夫々「加圧制動制御量」という。
【0025】
本実施例のブレーキアクチュエータ35は、右前輪WFR及び左後輪WRLに対してブレーキ液圧を伝える第1液圧系統と、左前輪WFL及び右後輪WRRに対してブレーキ液圧を伝える第2液圧系統と、を備えたものとして例示する。つまり、このブレーキアクチュエータ35は、X配管のブレーキ液圧回路を有する構造になっている。このブレーキアクチュエータ35は、電子制御装置1の制御指令に従って作動する。
【0026】
ここで、マスタシリンダ33の内部には図示しない2つの油圧室が設けられており、その夫々の油圧室に上記のマスタシリンダ圧が発生している。第1液圧系統においては、マスタシリンダ33の一方の油圧室のブレーキ液圧(マスタシリンダ圧)が第1液圧配管38を介してブレーキアクチュエータ35に供給され、このブレーキアクチュエータ35がブレーキ液圧をマスタシリンダ圧のまま又は調圧して右前輪WFR及び左後輪WRLの制動装置37FR,37RLに供給する。一方、第2液圧系統においては、他方の油圧室のブレーキ液圧(マスタシリンダ圧)が第2液圧配管39を介してブレーキアクチュエータ35に供給され、このブレーキアクチュエータ35がブレーキ液圧をマスタシリンダ圧のまま又は調圧して左前輪WFL及び右後輪WRRの制動装置37FL,37RRに供給する。
【0027】
このブレーキアクチュエータ35には、マスタシリンダ圧の検出を行うマスタシリンダ圧センサ41が設けられている。このマスタシリンダ圧センサ41は、第1又は第2の液圧配管38,39の内の何れか一方に配備され、その検出信号を電子制御装置1に送信する。ここでは、そのマスタシリンダ圧センサ41を第1液圧配管38に設けるものとして例示する。
【0028】
また、このブレーキアクチュエータ35は、第1及び第2の液圧系統に各々マスタカット弁42,43を備えている。ここでは、マスタシリンダ圧センサ41の下流にマスタカット弁42を配設する。これら各マスタカット弁42,43は、所謂常開式のブレーキ液の流量調整用電磁弁であって、非通電時に開弁状態にあり、電子制御装置1による通電に伴って弁開度の制御が実行されるものである。夫々のマスタカット弁42,43は、通電量に応じて弁開度を制御することで、後述する加圧ポンプ69,70から吐出されたブレーキ液の圧力を調節し、これをマスタシリンダ33側へ開放する。尚、この実施例にて示す下流とは、ペダル操作時のブレーキ液の流動方向(つまり、制動装置37FL,37FR,37RL,37RRへと向かう方向)における下流側のことを表すものとする。
【0029】
このブレーキアクチュエータ35においては、第1液圧配管38がマスタカット弁42を介して連結通路44に接続される一方、第2液圧配管39がマスタカット弁43を介して連結通路45に接続される。そして、第1液圧系統の連結通路44には、そこから分岐させるが如く2本の分岐通路46,47を接続し、第2液圧系統の連結通路45には、そこから分岐させるが如く2本の分岐通路48,49を接続する。第1液圧系統においては、その各々の分岐通路46,47を夫々に右前輪WFRの液圧配管36FRと左後輪WRLの液圧配管36RLに接続する。一方、第2液圧系統においては、その各々の分岐通路48,49を夫々に右後輪WRRの液圧配管36RRと左前輪WFLの液圧配管36FLに接続する。
【0030】
また、その各分岐通路46,47,48,49上には、夫々の制動装置37FL,37FR,37RL,37RR毎のブレーキ液圧を調整可能な液圧調圧装置が車輪WFL,WFR,WRL,WRR毎に配設されている。その夫々の液圧調圧装置は、車輪WFL,WFR,WRL,WRR毎に用意された保持弁50,51,52,53と液圧排出通路54,55,56,57と減圧弁58,59,60,61とで構成される。ここでは、各分岐通路46,47,48,49上に保持弁50,51,52,53が各々配備されており、更に、これら各保持弁50,51,52,53よりも下流側に液圧排出通路54,55,56,57が夫々に分岐通路46,47,48,49から分岐させるが如く接続されている。そして、その各液圧排出通路54,55,56,57上には、夫々に減圧弁58,59,60,61が配備されている。
【0031】
その夫々の保持弁50,51,52,53は、所謂常開式の電磁弁であって、非通電時に開弁状態にあり、電子制御装置1による通電に伴って閉弁させられるものである。一方、各減圧弁58,59,60,61は、所謂常閉式の電磁弁であって、非通電時に閉弁状態にあり、電子制御装置1による通電に伴って開弁させられるものである。
【0032】
また、ここでは、第1液圧系統の夫々の液圧排出通路54,55を一纏めにする液圧排出集合通路62と、第2液圧系統の夫々の液圧排出通路56,57を一纏めにする液圧排出集合通路63と、が用意されている。その夫々の液圧排出集合通路62,63は、各々補助リザーバ64,65に接続されている。
【0033】
更に、第1液圧系統においては、連結通路44と各分岐通路46,47との分岐点から分岐して液圧排出集合通路62に接続されるポンプ通路66を配設する。これと同様に、第2液圧系統においては、連結通路45と各分岐通路48,49との分岐点から分岐して液圧排出集合通路63に接続されるポンプ通路67を配設する。
【0034】
その夫々のポンプ通路66,67には、電動機68によって駆動される加圧ポンプ(加圧装置)69,70を各々配備している。これら各加圧ポンプ69,70は、夫々にマスタカット弁42,43側の各分岐点に向けてブレーキ液を吐出させるものであり、夫々に分岐通路46,47と分岐通路48,49に対して加圧されたブレーキ液圧を供給する。つまり、第1液圧系統の加圧ポンプ69は、右前輪WFRと左後輪WRLに発生させる制動力を増大させるべく、夫々の制動装置37FR,37RLに供給するブレーキ液圧の増圧を行う。一方、第2液圧系統の加圧ポンプ70は、左前輪WFLと右後輪WRRに発生させる制動力を増大させるべく、夫々の制動装置37FL,37RRに供給するブレーキ液圧の増圧を行う。尚、電動機68は、図示しないバッテリからの電力供給により駆動する。また、その各ポンプ通路66,67には、加圧ポンプ69,70から吐出された夫々のブレーキ液の脈動を回避するダンパ室71,72が配設されている。
【0035】
また、このブレーキアクチュエータ35には、第1及び第2の液圧配管38,39から各々分岐して補助リザーバ64,65に夫々接続される吸入通路73,74が配設されており、更に、その夫々の吸入通路73,74の補助リザーバ64,65側にリザーバカット逆止弁75,76が配設されている。
【0036】
このように構成した本実施例の制動システムは、その動作が上述したように電子制御装置1によって制御され、ABS(アンチロック・ブレーキ・システム)制御やVSC(ビークル・スタビリティ・コントロール)制御等を行うことができる。例えば、電子制御装置1は、運転者のブレーキペダル31の操作量や後述する車両挙動制御装置からの要求値に基づいて制御対象輪の目標制動制御量を設定する。この電子制御装置1は、マスタ圧制動制御量が目標制動制御量に対して不足していれば、その不足分を補うことが可能な制御対象輪の目標ブレーキ液圧を求める。そして、この電子制御装置1は、その目標ブレーキ液圧に基づきブレーキアクチュエータ35を制御し、マスタシリンダ圧の加圧を行って、その目標制動制御量を満足させる加圧制動制御量を制御対象輪の制動装置37FL(37FR,37RL,37RR)に発生させる。
【0037】
[車両挙動制御装置]
また、本実施例の電子制御装置1には、前述したように、その一機能として車両挙動制御装置が用意されている。この車両挙動制御装置は、旋回中の車両10の挙動を安定させる為の車両挙動安定化制御を行う。
【0038】
具体的に、この車両挙動制御装置は、旋回中にブレーキアクチュエータ35を制御し、前後の旋回外輪の内の少なくとも一方に制動制御量(車輪制動トルク、車輪制動力)を発生させることで、旋回中の車両10の挙動を安定させる。例えば、この車両挙動制御装置は、その旋回外輪に対する制動制御によって、旋回動作に伴い車体に作用しているヨーモーメントとは逆方向のヨーモーメントを車体に発生させ、旋回中の車両10に対してオーバーステアの抑制制御(所謂スピン制御)を行うことで、オーバーステア傾向を示す車体をニュートラルステアに近づける。そのスピン制御においては、前側の旋回外輪に目標制動制御量FFout0を発生させる。また、スピン制御においては、後側の旋回外輪にも目標制動制御量FRout0を発生させる場合がある。この場合には、前側の旋回外輪の目標制動制御量FFout0を後側の旋回外輪の目標制動制御量FRout0よりも大きくする。
【0039】
そのスピン制御における旋回外輪に対する制動制御は、運転者が操舵操作を行った際の車両10の旋回動作におけるロールモーメントやヨーモーメントの大きさに応じて実行される。ここで、運転者は、ステアリングセンタを起点にした1回目の操舵操作を行い、この操舵操作に続く1回目とは逆向きのステアリングセンタを超えた2回目の操舵操作を行う様に、ステアリングホイール21をステアリングセンタに対して左右交互に2回以上連続して操舵操作する切り返し操舵を行う場合がある。例えば、切り返し操舵を行う場面とは、旋回方向が左右交互に連続している旋回路を走行する場面やスラローム走行する場面等が該当する。そして、この切り返し操舵が行われると、車両10においては、切り返し操舵時の2回目以降の操舵操作が行われたときに、1回目の操舵操作時よりも車体に過大なロールモーメントとヨーモーメントが作用する可能性がある。これが為、スピン制御は、運転者がステアリングセンタを起点にした1回目の操舵操作を行ったときに実行されることもあるが、切り返し操舵時の2回目以降の操舵操作が行われたときに実行される可能性が高い。例えば、車両挙動制御装置は、その切り返し操舵によって今とは逆向きのステアリングセンタを超えた操舵操作が行われ、車体の旋回方向が逆向きになった際に、その車体に過大なロールモーメントとヨーモーメントが作用しないように制御を行う。その際には、新たな前後の旋回外輪の内の少なくとも一方に制動制御量を発生させ、そのヨーモーメントとは逆方向のヨーモーメントを車体に発生させることで、過大なロール量を抑えつつ車両10の挙動を安定させたまま旋回させることができる。
【0040】
ここで、例えば、切り返し操舵の1つ前の操舵操作におけるステアリングホイール21の操舵角度δが大きく、また、1つ前の操舵操作からの切り返し操舵の際の操舵角速度ωstrが速い場合、切り返し操舵による旋回方向の反転によって車体に作用するロールモーメントやヨーモーメントは、1つ前の操舵操作の操舵角度δが小さく、また、1つ前の操舵操作からの切り返し操舵の操舵角速度ωstrが遅い場合よりも大きくなる。そして、その操舵角度δが所定値以上で、且つ、操舵角速度ωstrが所定値以上のときには、旋回外輪の制動制御量FFoutで発生させるべきヨーモーメントが大きいので、旋回方向が反転した後の前後夫々の旋回外輪にスピン制御の為の制動制御量FFout,FRoutを発生させなければならない可能性がある。これに対して、その操舵角度δが所定値よりも小さく、且つ、操舵角速度ωstrが所定値よりも遅いときには、操舵角度δが所定値以上、且つ、操舵角速度ωstrが所定値以上のときと比べて、旋回外輪の制動制御量で発生させるべきヨーモーメントが小さいので、前側の旋回外輪だけにスピン制御の為の制動制御量FFoutを発生させればよい。尚、その夫々の所定値は、例えば車両重心位置等により変わる閾値であり、車種毎に異なる。
【0041】
このことから、この車両挙動制御装置は、旋回方向の反転と共に新たに旋回外輪となる制御対象輪が制動制御量を応答性良く発生させることができるように、旋回外輪となる以前の旋回内輪の状態で予備ブレーキ圧制御を行うことが好ましい。予備ブレーキ圧は、その制動制御量を前後夫々の旋回外輪に発生させる条件が成立した場合に、その旋回内輪の内の少なくとも前後何れか一方に印加する。
【0042】
具体的に、前後夫々の旋回外輪にスピン制御の為の制動制御量FFout,FRoutを発生させる必要がある場合には、急な切り返し操舵でも応答性良くスピン制御を行う為に、その前後夫々の旋回外輪が1つ前の操舵操作で未だ旋回内輪になっているうちに予備ブレーキ圧を加えておくことが望ましい。但し、予備ブレーキ圧制御を開始する時点では、その1つ前の操舵操作の後に行われた逆向きの操舵操作が、ステアリングセンタを超えた切り返し操舵であるのか、それとも、ステアリングセンタまでの戻し操作であるのかを正確に判別し難い。そして、スピン制御においては、概ね前側の旋回外輪にスピン制御の為の制動制御量FFoutを発生させるだけで十分車両挙動を安定させることができ、後側の旋回外輪にまでスピン制御の為の制動制御量FRoutを発生させるような過大なロールモーメントとヨーモーメントが作用する頻度は低い。これが為、制御対象輪となる頻度の低い後側の旋回外輪にまで予備ブレーキ圧を印加してしまうと、加圧ポンプ69(70)の駆動による燃費の悪化を招き好ましくない。
【0043】
そこで、本実施例においては、後側の旋回外輪にスピン制御の為の制動制御量FRoutを今現在発生させている場合、今のスピン制御と同様のスピン制御の実行が切り返し操舵に伴う旋回方向の反転時に求められる可能性があり、前後夫々の旋回外輪にスピン制御の為の制動制御量FFout,FRoutを発生させなければならない可能性もあるが、逆向きの操舵操作が切り返し操舵ではなく戻し操作であったときの燃費の悪化を鑑みて、旋回方向が反転したときに前側の旋回外輪となる今の前側の旋回内輪のみに予備ブレーキ圧を印加する。つまり、本実施例の車両挙動制御装置は、後側の旋回外輪にスピン制御の為の制動制御量FRoutを発生させたときに、この後車体の旋回方向が実際に反転するのか否か不明であるが、燃費の悪化を考慮しつつ切り返し操舵により旋回方向が反転すると見込んで、今の前側の旋回内輪に予備ブレーキ圧制御を開始する。その旋回方向が反転するとの見込みは、運転者の切り返し操舵、つまり逆向きの操舵操作を契機にして行う。
【0044】
その予備ブレーキ圧(以下、「見込み予備ブレーキ圧」ともいう。)とは、例えば制御対象輪の回転速度を明らかに低下させることのないブレーキ液圧、換言するならばそれ以上大きなブレーキ液圧を加えたときにそのブレーキ液圧に応じた制動制御量を応答性良く発生させることのできるブレーキ液圧のことである。この見込み予備ブレーキ圧は、ブレーキアクチュエータ35を制御することによって出力させる。
【0045】
例えば、車両挙動制御装置は、図3のフローチャートに示すように、先ず、スピン制御の実行許可条件が成立しているのか否かを判定する(ステップST1)。この判定は、オーバーステアを抑える制御の実行が必要なのか否かを決めるものであり、この制御における周知の実行許可条件に当て嵌めて行えばよい。例えば、車両挙動制御装置は、ヨーモーメントが所定の閾値よりも大きいときに、スピン制御の実行許可条件が成立していると判定する。
【0046】
車両挙動制御装置は、スピン制御の実行許可条件が成立していれば、スピン制御の為の各車輪WFL,WFR,WRL,WRRの目標制動制御量(目標車輪制動トルク、目標車輪制動力)を設定する(ステップST2)。スピン制御においては、前述したように、前後の旋回外輪の内の少なくとも一方に制動力を発生させるので、制動力を発生させる制御対象輪(前後の旋回外輪の内の少なくとも一方)の目標制動制御量を正の値に設定し、制動力を発生させない前後の旋回内輪の目標制動制御量を0に設定する。ここでは、前側の旋回外輪の目標制動制御量FFout0をA(>0)、後側の旋回外輪の目標制動制御量FRout0をB(>0)、前側の旋回内輪の目標制動制御量FFin0を0、後側の旋回内輪の目標制動制御量FRin0を0に設定している。
【0047】
車両挙動制御装置は、スピン制御の実行に伴い後側の旋回外輪にも制動制御量FRoutを発生させているのか否かを判定する(FRout>0?)(ステップST3)。ここでは後側の旋回外輪の目標制動制御量FRout0をB(>0)に設定しているので、車両挙動制御装置は、制動制御量FRoutの発生と共に、予備ブレーキ圧制御開始フラグFsを立てる(Fs=ON)(ステップST4)。これにより、車両挙動制御装置は、次に旋回外輪となる可能性のある前側の旋回内輪に見込み予備ブレーキ圧を加える。
【0048】
一方、この車両挙動制御装置は、後側の旋回外輪に制動制御量FRoutを発生させていなければ、予備ブレーキ圧制御開始フラグFsを降ろす(Fs=OFF)(ステップST5)。
【0049】
以下、この予備ブレーキ圧制御の具体例について説明する。
【0050】
車両挙動制御装置は、予備ブレーキ圧制御モードMを見込み予備ブレーキ圧制御モードM1又は通常予備ブレーキ圧制御モードM3に設定し、その何れかの制御モードでの予備ブレーキ圧制御を実行する。更に、この車両挙動制御装置は、見込み予備ブレーキ圧制御モードM1での見込み予備ブレーキ圧を印加させないときに、予備ブレーキ圧制御モードMを予備ブレーキ圧オフモードM1offに設定する。また、この車両挙動制御装置は、通常予備ブレーキ圧制御モードM3での予備ブレーキ圧(以下、「通常予備ブレーキ圧」ともいう。)を印加させないときに、予備ブレーキ圧制御モードMを予備ブレーキ圧オフモードM3offに設定する。
【0051】
その見込み予備ブレーキ圧制御モードM1とは、先に図3のフローチャートを用いて説明した見込み予備ブレーキ圧の制御モードのことであり、特に素早い切り返し操舵が行われた際の予備ブレーキ圧制御やスピン制御の制御応答性を高める為のものである。従って、この見込み予備ブレーキ圧制御モードM1においては、見込み予備ブレーキ圧の加わっている状態でブレーキ液圧を上昇させた際に、直ぐに制動制御量が発生するように、見込み予備ブレーキ圧の大きさが設定されている。この見込み予備ブレーキ圧制御モードM1では、後側の旋回外輪にスピン制御の為の制動制御量FRoutが発生しているときで、且つ、切り返し操舵が行われていると見込まれたときに、その制動制御量FRoutの出力と共に前側の旋回内輪に見込み予備ブレーキ圧を加える。但し、その見込みの切り返し操舵には、素早い切り返し操舵だけでなく、これよりもゆっくりと行われる切り返し操舵も含まれている。
【0052】
この見込み予備ブレーキ圧制御モードM1としては、右前輪WFRの制動装置37FRに見込み予備ブレーキ圧を印加する見込み右前輪制御モードM1FRと、左前輪WFLの制動装置37FLに見込み予備ブレーキ圧を印加する見込み左前輪制御モードM1FLと、が用意されている。
【0053】
この車両挙動制御装置は、見込み右前輪制御モードM1FRを設定した際に、ブレーキアクチュエータ35を制御して右前輪WFRに見込み予備ブレーキ圧を印加する。その際、車両挙動制御装置は、ブレーキアクチュエータ35において、右前輪WFRに係るマスタカット弁42と減圧弁58を閉弁させると共に保持弁50を開弁させ、且つ、見込み予備ブレーキ圧が右前輪WFRの制動装置37FRに加わるように電動機68と加圧ポンプ69を駆動させる。その際のブレーキアクチュエータ35は、他の車輪WFL,WRL,WRRに係るマスタカット弁43と保持弁51,52,53と減圧弁59,60,61が閉弁され、他の車輪WFL,WRL,WRRに制動制御量が働かない(つまり見込み予備ブレーキ圧が加わらない)ように制御されている。
【0054】
また、この車両挙動制御装置は、見込み左前輪制御モードM1FLを設定した際に、ブレーキアクチュエータ35を制御して左前輪WFLに見込み予備ブレーキ圧を印加する。その際、車両挙動制御装置は、ブレーキアクチュエータ35において、左前輪WFLに係るマスタカット弁43と減圧弁61を閉弁させると共に保持弁53を開弁させ、且つ、見込み予備ブレーキ圧が左前輪WFLの制動力発生手段37FLに加わるように電動機68と加圧ポンプ70を駆動させる。その際のブレーキアクチュエータ35は、他の車輪WFR,WRL,WRRに係るマスタカット弁42と保持弁50,51,52と減圧弁58,59,60が閉弁され、他の車輪WFR,WRL,WRRに制動力が働かない(見込み予備ブレーキ圧が加わらない)ように制御されている。
【0055】
一方、通常予備ブレーキ圧制御モードM3とは、従来の予備ブレーキ圧の制御モードに相当するものであり、例えば見込み予備ブレーキ圧制御モードM1で発生させる見込み予備ブレーキ圧よりも低い予備ブレーキ圧を印加することのできる制御モードである。この通常予備ブレーキ圧制御モードM3には、マスタ弁閉じモードM3aとモータ駆動モードM3bとが用意されている。
【0056】
マスタ弁閉じモードM3aは、通常予備ブレーキ圧を印加する制御対象輪のマスタカット弁42(43)と減圧弁58(59,60,61)を閉弁すると共に、その制御対象輪の保持弁50(51,52,53)を開弁し、且つ、電動機68と加圧ポンプ70を駆動させることで、その制御対象輪に通常予備ブレーキ圧を加えるモードのことである。
【0057】
モータ駆動モードM3bは、そのマスタ弁閉じモードM3aに対して制御対象輪のマスタカット弁42(43)を開弁させたものであり、マスタ弁閉じモードM3aよりも弱い通常予備ブレーキ圧を発生させる。
【0058】
また、この車両挙動制御装置は、予備ブレーキ圧オフモードM1off,M3offを設定した際に、ブレーキアクチュエータ35を制御して各車輪WFL,WFR,WRL,WRRに制動力が働かない(予備ブレーキ圧が加わらない)ようにする。その際、車両挙動制御装置は、ブレーキアクチュエータ35において、少なくとも電動機68と加圧ポンプ69,70を駆動させないように制御する。
【0059】
以下、本実施例の車両挙動制御装置の演算処理動作(予備ブレーキ圧制御)の具体例を図4及び図5のフローチャートに基づいて詳述する。
【0060】
先ず、図4のフローチャートに示す如く、車両挙動制御装置は、予備ブレーキ圧制御の実行を許可して良いのか否かの判断を行う(ステップST10)。このステップST10の判断は、予備ブレーキ圧制御の実行に支障があるのか否かを観るものである。例えば、このステップST10においては、非制動中であり、且つ、ABS制御やVSC制御等に必要な制動システムやセンサが正常に機能しているときに「予備ブレーキ圧制御の実行を許可する」との判断を行う。
【0061】
車両挙動制御装置は、予備ブレーキ圧制御の実行が許可されていなければ、予備ブレーキ圧制御モードMを予備ブレーキ圧オフモードM1offに設定する(ステップST15)。一方、この車両挙動制御装置は、予備ブレーキ圧制御の実行が許可されていれば、予備ブレーキ圧制御モードMが予備ブレーキ圧オフモードM1offに設定されているのか否かを判定する(ステップST20)。尚、初期状態(イグニッションONの後で一度も予備ブレーキ圧制御が実行されていない状態)においては、予備ブレーキ圧制御モードMが予備ブレーキ圧オフモードM1offに設定されているものとする。
【0062】
車両挙動制御装置は、予備ブレーキ圧オフモードM1offに設定されていない場合、後述するステップST70に進む。これに対して、この車両挙動制御装置は、予備ブレーキ圧オフモードM1offが設定されている場合、前述したステップST1と同様に、スピン制御の実行許可条件が成立しているのか否かを判定する(ステップST25)。
【0063】
車両挙動制御装置は、スピン制御の実行許可条件が成立していなければ、後述するステップST70に進む。これに対して、この車両挙動制御装置は、スピン制御の実行許可条件が成立していれば、前述したステップST2と同様に、スピン制御の為の各車輪WFL,WFR,WRL,WRRの目標制動制御量を設定する(ステップST30)。そして、この車両挙動制御装置は、そのスピン制御の実行に伴って、後側の旋回外輪に制動制御量FRoutを発生させているのか否かを判定する(FRout>0?)(ステップST35)。
【0064】
車両挙動制御装置は、その制動制御量FRoutを発生させていれば、車両10が右旋回中で、且つ、その際の操舵角速度ωstrが正の値なのか否か、つまり右旋回中に逆方向(反時計回りの方向)にステアリングホイール21が操舵操作されたのか否かの判定を行う(ステップST40)。
【0065】
そして、右旋回中で且つ操舵角速度ωstrが正の値の場合、この車両挙動制御装置は、予備ブレーキ圧制御モードMを見込み右前輪制御モードM1FRに設定し、今の前側の旋回内輪である右前輪WFRに見込み予備ブレーキ圧を印加する(ステップST45)。即ち、車両挙動制御装置は、右旋回中に当該旋回方向とは逆向きの操舵操作が為された場合、その逆向きの操舵操作がステアリングセンタへの戻し操作であるのかステアリングセンタを超える切り返し操舵であるのか判別し難いが、切り返し操舵であると見込んで、その切り返し操舵による旋回方向の反転に伴い次の前側の旋回外輪になる右前輪WFRに見込み予備ブレーキ圧を加える。車両挙動制御装置は、この後、後述するステップST70に進む。
【0066】
これに対して、右旋回中で且つ操舵角速度ωstrが正の値でない場合、この車両挙動制御装置は、車両10が左旋回中で、且つ、その際の操舵角速度ωstrが負の値なのか否か、つまり左旋回中に逆方向(時計回りの方向)にステアリングホイール21が操舵操作されたのか否かを判定する(ステップST50)。
【0067】
この車両挙動制御装置は、左旋回中で且つ操舵角速度ωstrが負の値の場合、予備ブレーキ圧制御モードMを見込み左前輪制御モードM1FLに設定し、今の前側の旋回内輪である左前輪WFLに見込み予備ブレーキ圧を印加する(ステップST55)。即ち、車両挙動制御装置は、左旋回中に当該旋回方向とは逆向きの操舵操作が為された場合、ここでも、その逆向きの操舵操作がステアリングセンタへの戻し操作であるのかステアリングセンタを超える切り返し操舵であるのか判別し難いが、切り返し操舵であると見込んで、その切り返し操舵による旋回方向の反転に伴い次の前側の旋回外輪になる左前輪WFLに見込み予備ブレーキ圧を加える。車両挙動制御装置は、この後、後述するステップST70に進む。
【0068】
そのステップST50で否定判定された場合、運転者が切り返し操舵を行っていないことは明らかなので、車両挙動制御装置は、後述するステップST70に進む。
【0069】
一方、後側の旋回外輪にスピン制御の為の制動制御量FRoutが発生していない場合、車両挙動制御装置は、検出された操舵角度δの絶対値が所定の閾値Thδ(>0)よりも小さく、且つ算出された操舵角速度ωstrの絶対値が所定の閾値Thωstr2(>0)よりも小さいのか、それとも算出されたヨー角加速度αyの絶対値が所定の閾値Thαy2(>0)よりも小さいのかについて判定する(ステップST60)。このステップST60においては、操舵角度δの絶対値が所定の閾値Thδよりも小さく且つ操舵角速度ωstrの絶対値が所定の閾値Thωstr2よりも小さいとき、又は操舵角度δの絶対値が所定の閾値Thδよりも小さく且つヨー角加速度αyの絶対値が所定の閾値Thαy2よりも小さいときに肯定判定が為され、それ以外のときに否定判定が為される。
【0070】
このステップST60で肯定判定されたときには、ステアリングセンタへのステアリングホイール21の戻し操作であると判断させる。これが為、このときの車両挙動制御装置は、予備ブレーキ圧制御モードMを予備ブレーキ圧オフモードM1offに設定し(ステップST65)、後述するステップST70に進む。これに対して、ステップST60で否定判定されたときには、例えば操舵角速度ωstrが速く、切り返し操舵が行われる可能性もあるので、予備ブレーキ圧オフモードM1offを設定せずに、ステップST70に進む。
【0071】
車両挙動制御装置は、図4のフローチャートにおける演算処理を終えた後、図5のフローチャートに示す如く、前回の予備ブレーキ圧制御モードM2が予備ブレーキ圧オフモードM1offではなく、且つ、今回の予備ブレーキ圧制御モードMが予備ブレーキ圧オフモードM1offであるのかの判定を行う(ステップST70)。このステップST70では、前回の予備ブレーキ圧制御モードM2が見込み右前輪制御モードM1FR又は見込み左前輪制御モードM1FLであり、且つ、今回の予備ブレーキ圧制御モードMが予備ブレーキ圧オフモードM1offであれば、肯定判定を行い、それ以外であれば、否定判定を行う。例えば、このステップST70においては、見込み予備ブレーキ圧制御モードM1の設定が1度目のとき(つまり前回の予備ブレーキ圧制御モードM2が決まっていないとき)や、見込み予備ブレーキ圧制御の継続中(前回の予備ブレーキ圧制御モードM2も今回の予備ブレーキ圧制御モードMも見込み予備ブレーキ圧制御モードM1であるとき)に否定判定が為される。
【0072】
このステップST70において肯定判定された場合とは、見込み予備ブレーキ圧制御が1回実行され、その次の操舵操作がステアリングセンタへのステアリングホイール21の戻し操作と判断可能な場合である。これが為、車両挙動制御装置は、前回の予備ブレーキ圧制御モードM2が予備ブレーキ圧オフモードM1offではなく、且つ、今回の予備ブレーキ圧制御モードMが予備ブレーキ圧オフモードM1offである場合、見込み予備ブレーキ圧制御1回作動フラグ(以下、「見込み作動フラグ」という。)F1を立てる(F1=ON)(ステップST75)。その見込み作動フラグF1とは、見込み予備ブレーキ圧制御の実行が1回終わったことを表すものである。
【0073】
続いて、この車両挙動制御装置は、上記ステップST70で否定判定した後又は上記ステップST75で見込み作動フラグF1を立てた後、見込み作動フラグF1が立っているのか否かの判定を行う(ステップST80)。このステップST80では、上記ステップST75を経ていれば肯定判定が為され、上記ステップST70で否定判定された場合、例えば見込み右前輪制御モードM1FR又は見込み左前輪制御モードM1FLが設定されているならば、否定判定が為される。
【0074】
車両挙動制御装置は、見込み作動フラグF1が立っている場合、その見込み作動フラグF1の立っている時間(以下、「見込み作動フラグ経過時間」という。)C1をカウントする(C1=C1+1)(ステップST85)。
【0075】
続いて、この車両挙動制御装置は、上記ステップST80で否定判定した後又は上記ステップST85で見込み作動フラグ経過時間C1をカウントした後、見込み作動フラグ経過時間C1が所定時間T1を超えたのか否かについての判定を行う(ステップST90)。その所定時間T1とは、見込み予備ブレーキ圧制御の実行を禁止する最大の時間である。つまり、このステップST90の判定は、見込み予備ブレーキ圧制御が1回実行され、その次にステアリングセンタへのステアリングホイール21の戻し操作が行われた場合に、見込み作動フラグ経過時間C1が所定時間T1を超えるまで見込み予備ブレーキ圧制御の実行を禁止させる為のものである。このステップST90では、上記ステップST85でカウントされた見込み作動フラグ経過時間C1が所定時間T1を超えていないときだけでなく、上記ステップST80で見込み作動フラグF1が立っていないと判定されたとき、例えば予備ブレーキ圧制御モードMが見込み右前輪制御モードM1FR又は見込み左前輪制御モードM1FLに設定されているときにも否定判定が為される。
【0076】
車両挙動制御装置は、見込み作動フラグ経過時間C1が所定時間T1を超えた場合、見込み作動フラグF1を下ろす(F1=OFF)と共に見込み作動フラグ経過時間C1をリセットする(C1=0)(ステップST95)。これにより、ステアリングセンタへのステアリングホイール21の戻し操作の後で切り返し操舵が再び行われたときに、一定時間(=所定時間T1)禁止させていた見込み予備ブレーキ圧制御を再度実行させることができる。
【0077】
続いて、車両挙動制御装置は、上記ステップST90で否定判定された後又は上記ステップST95を経た後、前回の予備ブレーキ圧制御モードM2として今回の予備ブレーキ圧制御モードMを当てはめる(M2←M)(ステップST100)。
【0078】
そして、この車両挙動制御装置は、その新たに設定した前回の予備ブレーキ圧制御モードM2が予備ブレーキ圧オフモードM1offではなく、且つ、見込み作動フラグF1が下ろされているのかの判定を行う(ステップST105)。
【0079】
車両挙動制御装置は、前回の予備ブレーキ圧制御モードM2が予備ブレーキ圧オフモードM1offで、且つ、見込み作動フラグF1が下ろされている場合、予備ブレーキ圧制御モードMをマスタ弁閉じモードM3aに設定し、今の前後の旋回内輪の内の少なくとも一方にマスタ弁閉じモードM3aによる通常予備ブレーキ圧を印加する(ステップST110)。
【0080】
これに対して、ステップST105で否定判定を行った場合、車両挙動制御装置は、通常予備ブレーキ圧制御1回作動フラグ(以下、「通常作動フラグ」という。)F2が立っているのか否かの判定を行う(ステップST115)。その通常作動フラグF2とは、通常予備ブレーキ圧制御の実行が1回終わったことを表すものであり、例えば通常予備ブレーキ圧制御を終えた時点で立てられる。
【0081】
車両挙動制御装置は、通常作動フラグF2が立っている場合、その通常作動フラグF2の立っている時間(以下、「通常作動フラグ経過時間」という。)C2をカウントする(C2=C2+1)(ステップST120)。そして、この車両挙動制御装置は、その通常作動フラグ経過時間C2が所定時間T2よりも短いのか否かについての判定を行う(ステップST125)。その所定時間T2とは、通常予備ブレーキ圧制御の実行を継続させる最大の時間である。
【0082】
車両挙動制御装置は、通常作動フラグ経過時間C2が所定時間T2よりも短い場合、ステップST110に進み、通常予備ブレーキ圧制御モードM3の中でも高い通常予備ブレーキ圧の印加が可能なマスタ弁閉じモードM3aに予備ブレーキ圧制御モードMを設定し、今の前後の旋回内輪の内の少なくとも一方にマスタ弁閉じモードM3aによる通常予備ブレーキ圧を印加する。
【0083】
これに対して、車両挙動制御装置は、通常作動フラグ経過時間C2が所定時間T2以上になった場合、マスタ弁閉じモードM3aよりも通常予備ブレーキ圧が低いモータ駆動モードM3bに予備ブレーキ圧制御モードMを設定し、今の前後の旋回内輪の内の少なくとも一方にモータ駆動モードM3bによる通常予備ブレーキ圧を印加する(ステップST130)。
【0084】
一方、車両挙動制御装置は、通常作動フラグF2が立っていない場合、予備ブレーキ圧制御モードMを予備ブレーキ圧オフモードM3offに設定する(ステップST135)。
【0085】
この車両挙動制御装置は、今とは逆向きのステアリングセンタを超えた操舵操作を運転者が行って、車体の旋回方向が反転した場合に、スピン制御が必要な車両の挙動であれば、予備ブレーキ圧の加わっている新たな旋回外輪にスピン制御の為の目標制動制御量を応答性良く発生させることができる。特に、この車両挙動制御装置においては、今の旋回動作におけるスピン制御の為の後側の旋回外輪の制動制御の開始と共に、旋回方向の反転によって次に旋回外輪となる可能性のある前側の旋回内輪に見込み予備ブレーキ圧を印加する。つまり、この車両挙動制御装置においては、車体の旋回方向が実際に反転する前に、その前側の旋回内輪に対して見込み予備ブレーキ圧を加えておくことができる。故に、この車両挙動制御装置に依れば、その今の旋回状態からの切り返し操舵が急操舵等の素早い予備ブレーキ圧の出力が必要とされるものであっても、車体が次の逆向きの旋回動作に移る前に素早く予備ブレーキ圧を印加できる。従って、この車両挙動制御装置に依れば、旋回方向反転後の新たな前側の旋回外輪に応答性良く目標制動制御量を発生させることができるので、スピン制御の制御性能を向上させることができる。
【0086】
更に、この車両挙動制御装置においては、運転者の逆方向の操舵操作に伴う車両の挙動を観ず、その逆方向の操舵操作がステアリングセンタを超える切り返し操舵であるのかステアリングセンタまでの戻し操作であるのかが明らかでない状態で、前側の旋回内輪に見込み予備ブレーキ圧制御を行うので、その見込み予備ブレーキ圧制御が不要な場合もある。しかしながら、スピン制御においては、例えば運転者の逆方向の操舵操作の操作量(操舵角速度等)が切り返し操舵に該当しないものであることが判った場合、スピン制御の為に後側の旋回外輪に発生させていた制動制御量FRoutを0にする。従って、この場合には、上記ステップST35で「NO」となり、また、上記ステップST60で「YES」となるので、予備ブレーキ圧制御モードMが予備ブレーキ圧オフモードM1offに設定され、前側の旋回内輪への見込み予備ブレーキ圧制御が中止される。故に、この車両挙動制御装置に依れば、見込み予備ブレーキ圧制御が不要な場合、見込み予備ブレーキ圧の印加後すぐに見込み予備ブレーキ圧制御が中止になり、不要な見込み予備ブレーキ圧制御を短時間で終わらせることができるので、見込み予備ブレーキ圧制御を要するときの上記の制御応答性を確保しつつ、不要なときの例えば燃費の悪化等を低く抑えることができる。
【0087】
また、この車両挙動制御装置においては、後側の旋回外輪にスピン制御の為の制動制御量を発生させる頻度が低いので、旋回方向反転前の後側の旋回内輪に見込み予備ブレーキ圧制御を行わず、前側の旋回内輪にのみ見込み予備ブレーキ圧制御を行う。従って、この車両挙動制御装置に依れば、不要な見込み予備ブレーキ圧制御の為のブレーキアクチュエータ35の作動頻度の増加を抑えることができる。尚、後側の旋回外輪に対してスピン制御の為の制動制御量を発生させる頻度が高い場合には、前後の旋回内輪に対して各々見込み予備ブレーキ圧制御を行ってもよい。
【符号の説明】
【0088】
1 電子制御装置(ECU)
10 車両
21 ステアリングホイール
25 操舵操作量検出装置
35 ブレーキアクチュエータ
37FL,37FR,37RL,37RR 制動装置
WFL,WFR,WRL,WRR 車輪
【特許請求の範囲】
【請求項1】
前後の旋回外輪の内の少なくとも一方に制動制御量を発生させることで車両の挙動を安定させる車両挙動安定化制御を行う場合、該制動制御量を前後夫々の旋回外輪に発生させる条件が成立した場合に、前後の旋回内輪の内の少なくとも一方に対して予備ブレーキ圧を印加することを特徴とした車両挙動制御装置。
【請求項2】
前記予備ブレーキ圧の印加は、前記車両挙動安定化制御の実行中に今の車両の旋回動作とは逆向きの操舵操作が検知されたときに実行する請求項1記載の車両挙動制御装置。
【請求項3】
前記車両挙動安定化制御がオーバーステア抑制制御の場合、前側の旋回内輪に対して前記予備ブレーキ圧の印加を行う請求項1又は2に記載の車両挙動制御装置。
【請求項1】
前後の旋回外輪の内の少なくとも一方に制動制御量を発生させることで車両の挙動を安定させる車両挙動安定化制御を行う場合、該制動制御量を前後夫々の旋回外輪に発生させる条件が成立した場合に、前後の旋回内輪の内の少なくとも一方に対して予備ブレーキ圧を印加することを特徴とした車両挙動制御装置。
【請求項2】
前記予備ブレーキ圧の印加は、前記車両挙動安定化制御の実行中に今の車両の旋回動作とは逆向きの操舵操作が検知されたときに実行する請求項1記載の車両挙動制御装置。
【請求項3】
前記車両挙動安定化制御がオーバーステア抑制制御の場合、前側の旋回内輪に対して前記予備ブレーキ圧の印加を行う請求項1又は2に記載の車両挙動制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−28201(P2013−28201A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2011−163633(P2011−163633)
【出願日】平成23年7月26日(2011.7.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成23年7月26日(2011.7.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]