
車両探索システム
【課題】 車両位置検出を正確に、しかもGPS電波の届かないような状況でも行い得るようにする。
【解決手段】 車両探索システム4は、車両1側に、絶対方位を検出することが可能な地磁気センサ11と、設定された複数の方位方向にそれぞれ異なる方位識別信号を出力する送受信部9と、この送受信部9により検出された絶対方位に基づいて前記方位識別信号の出力方位方向を合わせるように制御する制御部6とを設け、始動キー3側に前記送受信部9から出力された方位識別信号を受信可能な送受信部20と、受信した方位識別信号に基づいて、該始動キー3に対する前記車両1の方位を検出する制御部17と、検出された車両1の方位を報知する表示部15及び音声出力部16とを設けた構成である。
【解決手段】 車両探索システム4は、車両1側に、絶対方位を検出することが可能な地磁気センサ11と、設定された複数の方位方向にそれぞれ異なる方位識別信号を出力する送受信部9と、この送受信部9により検出された絶対方位に基づいて前記方位識別信号の出力方位方向を合わせるように制御する制御部6とを設け、始動キー3側に前記送受信部9から出力された方位識別信号を受信可能な送受信部20と、受信した方位識別信号に基づいて、該始動キー3に対する前記車両1の方位を検出する制御部17と、検出された車両1の方位を報知する表示部15及び音声出力部16とを設けた構成である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駐車車両から離れたユーザーが該車両の位置方向を検知することが可能な車両探索システムに関する。
【背景技術】
【0002】
この種の車両探索システムとしては、無線通信機を利用して、ユーザー(ドライバ)が携帯した送信機から、車両の受信機に、自車位置を検知するための指令を送信し、車両側では、この指令を受け取ると車両のライトの点灯や、ホーンの鳴動により自車位置を報知するものがある(特許文献1)。
【0003】
また、車両の停車時に、車の位置情報を、GPS機能付きキーに組み込んだメモリに記憶させ、該キーのGPS機能により車両位置への案内機能により、車両の位置にまでユーザーを誘導する方式のものもある(特許文献2)。
【0004】
さらに、ユーザーが携帯する複数のアンテナ付き受信機により、車両側の発信機の電波を受信し、この電波の電界強度の差により車両の位置と方向とを検出する方式のものもある(特許文献3)。
【特許文献1】特開平5−328461号公報
【特許文献2】特開平6−84092号公報
【特許文献3】特開平10−232999号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、これら特許文献1〜3のものは、いずれも、屋外の駐車場での使用を対象としており、特に、特許文献1、3に記載のものでは、絶対方位を報知するものではないので、車両の方向精度が低く、またマルチパルスの影響を受け易く、また、特許文献2のものでは、室内の駐車場(特に広い立体駐車場など)では、GPS電波が届かずに使用が困難であった。
【0006】
本発明は上述の事情に鑑みてなされたものであり、その目的は、車両位置検出を、正確に、しかもGPS電波の届かないような状況でも行い得る車両探索システムを提供するにある。
【課題を解決するための手段】
【0007】
上述の目的を達成するために、請求項1の発明は、車両に搭載され、絶対方位を検出することが可能な方位検出手段と、前記車両に搭載され、設定された複数の方位方向にそれぞれ異なる方位識別信号を出力する車両側無線通信手段と、前記車両に搭載され、前記方位検出手段により検出された絶対方位に基づいて前記方位識別信号の出力方位方向を前記設定された方位方向に合わせる方位調整手段と、携帯可能な携帯器と、この携帯器に設けられ前記車両側無線送信部から出力された方位識別信号を受信可能な携帯器側無線通信手段と、前記携帯器に設けられ、受信した方位識別信号に基づいて、該携帯器に対する前記車両の方位を検出する車両検出手段と、前記携帯器に設けられ、前記車両検出手段により検出された車両の方位を報知する報知手段とを備えてなる。
【0008】
これによれば、車両側において、方位検出手段により絶対方位を検出し、方位調整手段により、車両側無線通信手段が出力する方位識別信号の方位方向(指向方向)を前記絶対方位に基づいて前記設定した方位方向に合わせる。この結果、携帯器に搭載された携帯器側無線通信手段が方位識別信号を受信すると、車両検出手段がその方位識別信号により、当該信号の出所の方位つまり車両の存在場所の方位を絶対方位で検出することができる。検出された車両の方位は報知により報知される。この結果、携帯器からみて車両の位置を絶対方位でユーザーに報知することが可能となり、ユーザーからみて車両位置検出を正確に行なうことができる。しかも車両と携帯器との間で直接送受信するから、GPS電波を使用する場合とは違って広い立体駐車場などのGPS電波の届かない状況でも車両位置検出を行なうことができる。
【0009】
この場合、前記車両検出手段は、方位識別信号の受信強度分布に基づいて携帯器に対する前記車両の方位を検出するものでも良い(請求項2の発明)。このようにすると、例えば、方位識別信号が東西南北の4方位を示す4種類の方位識別信号であった場合に、その4方位の間の方位なども検出可能となる。
【0010】
また、前記車両検出手段が、方位識別信号の受信強度に基づいて携帯器に対する前記車両の離間距離を検出し、前記報知手段が、車両の方位の他に、この検出された距離も報知するようにしても良い(請求項3の発明)。このようにすると、携帯器(ユーザー)から車両までの距離も報知できて、便利である。
【0011】
さらにまた、前記車両側無線通信手段が、異なる方向に向く複数の指向性アンテナを備え、方位調整手段が、これら指向性アンテナの向きを変更させる駆動手段を備え、前記指向性アンテナを、前記方位検出手段から得た絶対方位と合致させるように前記駆動手段により向き調整するようにしても良く(請求項4の発明)、このようにすると、車両の停車向きがどの方位を指向しても、複数のアンテナをから設定された方位方向に確実に合わせることができる。
【0012】
また、車両側無線送信部が、可変指向性アンテナを有してなり、前記方位検出手段から得た絶対方位に基づいて、この可変指向性アンテナから、設定された方位方向に当該方位に対応する方位識別信号を出力するようにしても良く(請求項5の発明)、このようにすると、車両の停車向きがどの方位を指向しても、アンテナを動かすことなく、設定された方位方向に確実に方位識別信号を出力できる。
【0013】
また、前記報知手段が、表示部又は音声出力部の少なくとも一方を備えているようにしても良い(請求項6の発明)。
【0014】
また、前記携帯器は、車両の始動キーであっても良く(請求項7の発明)、これによれば、車両の駐車時に必ず携帯するものであるから、持ち忘れることがない。
【0015】
さらにまた、携帯器には、絶対方位を検出する携帯器側方位検出手段を備え、報知手段が、車両の方位を矢印により表示する表示部から構成され、前記携帯器側方位検出手段により検出された絶対方位と、該携帯器の車両方位検出手段により検出された車両の方位とに基づいて、携帯器に対する前記矢印の相対的な向きを決定するようにしても良い(請求項8の発明)。このようにすると、携帯器の向きがどの方位を向いていても、車両が位置する方位を確実に矢印にて表示することができる。
【発明を実施するための最良の形態】
【0016】
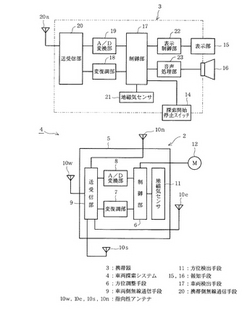
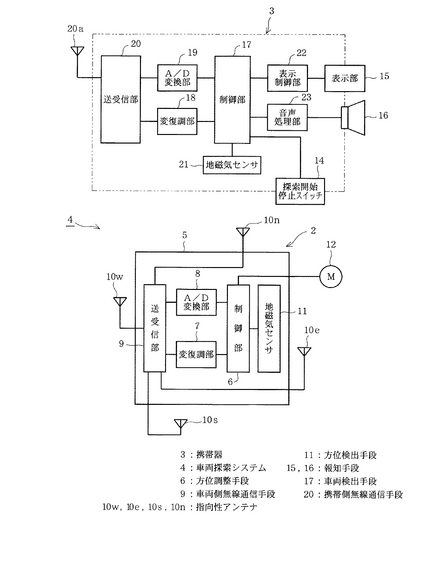
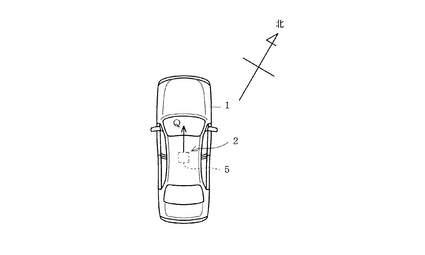
以下、本発明の第1の実施例につき図1ないし図8を参照して説明する。図1には、車両1(図2参照)に搭載された車載器2と、携帯器たる始動キー3とを示している。この車載器2と始動キー3とで、車両探索システム4を構成している。
【0017】
車載器2には、車載器本体5に、制御部6、変復調部7、A/D変換部8、車両側無線通信手段たる送受信部9、複数例えば4つのアンテナ10n、10e、10s、10w、地磁気センサ11が設けられており、これらは電気的に接続されている。また上記4つのアンテナ10n、10e、10s、10wは平面視にて90度の角度ピッチで設けられている。前記車載器本体5は車両1の適宜部位に中心部を回動中心として回動し得るように設けられており、駆動手段たる回動駆動用モータ12により回動される構成となっている。このモータ12は前記制御部6により制御されるようになっている。
【0018】
前記制御部6は、CPUや、ROM及びRAMなどのメモリなどを備えてなり、方位調整手段として機能する。この制御部6は、該車載器2及び始動キー3を相互に認識するための固有IDを記憶していると共に、方位識別のためのコードとして4つの方位識別コードCn、Ce、Cs、Cwを記憶しており、そのうち、コードCnは、この送受信部9から出力された信号が該車載器2から北方向へ指向することを識別するためであり、以下、コードCeは東方向へ、コードCsは南方向へ、コードCwは西方向へ指向することを識別するためのものである。
【0019】
前記変復調部7は、復調機能、及び変調機能を備えてなり、送受信部9において受信し増幅した受信信号を復調して、後述する探索指令を制御部6に供給する。また、変復調部7は、制御部6から固有IDや方位識別コードCn、Ce、Cs、Cwが与えられると、所定周波数の搬送波にこれら固有IDや方位識別コードCn、Ce、Cs、Cwを乗せるように変調して固有IDを含む方位識別信号Sn、Se、Ss、Swを出力する。この場合、方位識別信号Sn、Se、Ss、Swはそれぞれアンテナ10n、10e、10s、10wから出力されるようになっている。なお、無線通信形態はBluetoothでも無線LANでも良い。
【0020】
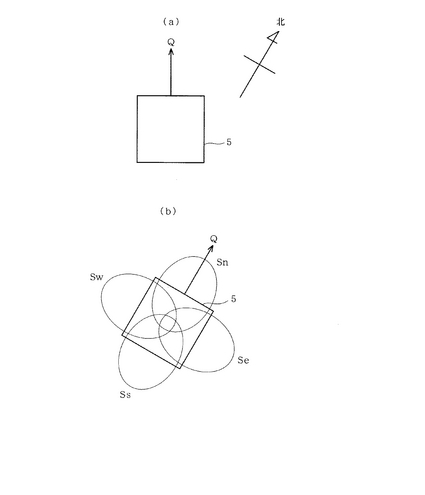
前記地磁気センサ11は方位検出手段たるものであり、東西南北の絶対方位を検出するものであり、車載器本体5の方位のずれ角度情報を制御部6に供給する。制御部6は、このずれ角度が無くなるように回動駆動用モータ12を駆動制御して車載器本体5の方位を設定方位(各アンテナ10n、10e、10s、10wが北、東、南、西の指向性電波を出力する方位)に調整する(方位調整手段)。
【0021】
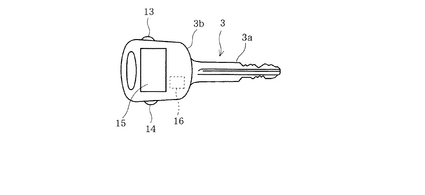
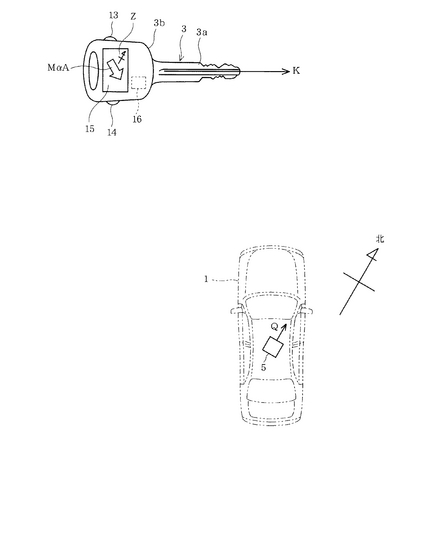
図3に示すように、始動キー3はキー部3a及び基部3bを備えており、この基部3bには、ドアロック、アンロックをするためのロック・アンロックスイッチ13を備えていると共に、ユーザーにより操作されると探索要求指令・停止指令を発生する探索開始・停止スイッチ14を備えている。さらに、この基部3bには、例えばLCDからなる表示部15が設けられていると共に音声出力部16が設けられている。これら表示部15及び音声出力部16は報知手段たるものである。
【0022】
さらに、上記基部3bには、図1に示す電子回路がモールドされている。この電子回路には、車両探索に関連する回路構成を示している。この電子回路には、車両検出手段たる制御部17、変復調部18、A/D変換部19、携帯器側無線通信手段たる送受信部20、地磁気センサ21、表示部15を駆動制御する表示制御部22、音声出力部16を駆動制御する音声処理部23、前述の表示部15、音声出力部16、探索開始・停止スイッチ14が含まれている。
【0023】
上記始動キー3の制御部17は、CPUや、ROM及びRAMなどのメモリなどを備えてなり、車両検出手段として機能する。この制御部17は、車載器2を認識するための固有IDを記憶していると共に、前述した方位識別のためのコードとして4つの方位識別コードCn、Ce、Cs、Cwを記憶している。
【0024】
前記変復調部18は、復調機能、及び変調機能を備えてなり、送受信部20において無指向性のアンテナ20aを介して受信し増幅した受信信号を復調して、後述する車載器2からの応答を制御部17に供給する。また、この変復調部18は、探索開始・停止スイッチ14から制御部17に探索要求指令が与えられると、この制御部17からこの探索要求指令を受けて、所定周波数の搬送波に固有IDや探索要求指令を含むコードを乗せるように変調して探索要求指令信号Saを出力し、また、探索停止指令が与えられると、探索停止指令信号Sbを同様に出力する。この場合、探索要求信号は無指向性のアンテナ20aから出力されるようになっている。
【0025】
前記地磁気センサ21は携帯器側方位検出手段たるものであり、東西南北の絶対方位を検出するものであり、始動キー3自身の基準方向(図7の矢印K方向)に対する方位のずれ角度情報を制御部17に供給する。制御部17は、このずれ角度と、後述する車両検出手段により検出された車両の方位とに応じて、表示部15に、車両の方位(始動キー3からみた方位)を示す矢印を表示させると共に、音声出力部16に車両の方位(始動キー3からみた方位)を音声により報知するものである。
【0026】
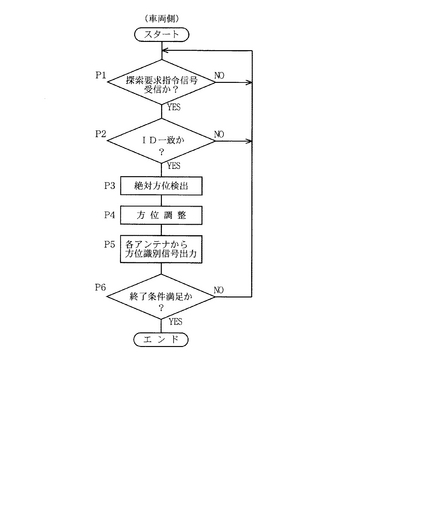
さて、前記車載器2の制御部6の制御内容と始動キー3の制御部17の制御内容について説明する。まず、車載器2の制御部6の制御内容について図4を参照して説明する。図4の制御は、始動キー3が抜かれたときに開始される。まず、ステップP1では、始動キー3からの探索要求指令信号Saの受信があるか否かを判断する。この場合、各アンテナ10n、10e、10s、10wを使用して受信する。受信があると、ステップP2で、固有IDが一致すれば、ステップP3で、地磁気センサ11により絶対方位を検出して、車載器本体5の向き(図6(a)のQ方向の向き)と絶対方位「北」との角度のずれを検出し、ステップP4で、回動駆動用モータ12を駆動制御して車載器本体5の向きQが北方向を向くように方位調整する。これにより、図2及び図6(a)において、車両1の向きとほぼ同じ向きにあった車載器本体5が図7及び図6(b)に示すように北向きに回動する。これにより各アンテナ10n、10e、10s、10wの電波出力方向が北、東、南、西方向に合致するようになる。
【0027】
そして、ステップP5で各アンテナ10n、10e、10s、10wから順次方位識別信号Sn、Se、Ss、Swを出力する。
【0028】
次のステップP6で、終了条件満足か否かを判断する。この終了条件は、例えば、前記始動キー3からの探索停止信号Sbを受信したこと、最初の受信(ステップP1の「YES」)から一定時間が経過したこと、車両のドアがアンロックされたことのいずれかである。
【0029】
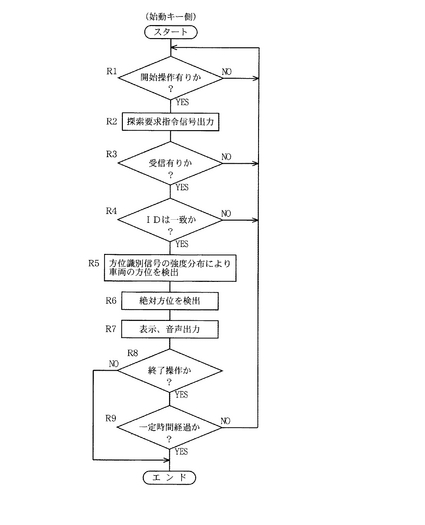
次に、図5において、始動キー3の制御部17の制御内容について説明する。図5に示した制御は始動キー3の抜き取りにより開始される。ステップR1では、探索開始・停止スイッチ14が開始操作(最初のオンで開始)されたか否かを判断し、操作されれば、ステップR2で探索要求指令信号Saを出力する。
【0030】
ステップR3で車載器2からの方位識別信号Sn、Se、Ss、Swのいずれかを受信すると、ステップR4で、固有IDが一致したか否かを判断し、一致すれば、ステップR5で受信した信号の強度分布及び強度に基づいて車載器2の方位(車両1の方位)及び離間距離を検出する。すなわち、方位識別信号Snを受信すると復調したときに方位識別コードCnを識別することから、方位「北」方向へ出力された信号であることを制御部17が認識する。以下、同様に、方位識別信号Seの場合は「東」方向へ出力されたことを示す方位識別コードCeを識別し、方位識別信号Ssの場合は「南」方向へ出力されたことを示す方位識別コードCsを識別し、方位識別信号Swの場合は「西」方向へ出力されたことを示す方位識別コードCwを識別することになる。
【0031】
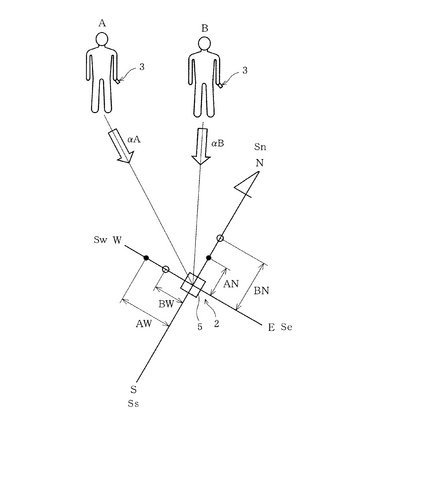
例えば、図8に示すように、始動キー3を携帯しているユーザーが位置Aにいた場合には、車両1からの方位識別信号Sn、Swが受信される。この場合、方位「北」を示す方位識別信号Snの受信強度がANで、方位「西」を示す方位識別信号Swの受信強度がAWとなり、この受信強度分布により車両1はユーザーAからみて方位αA方向(ほぼ東南東)であることが検出されることになる。その場合、受信強度により車両1までの距離も検出される。また、ユーザーが位置Bにいた場合には方位「北」を示す方位識別信号Snの受信強度がBNで、方位「西」を示す方位識別信号Swの受信強度がBWとなり、この受信強度分布により車両1はユーザーAからみて方位αB方向(ほぼ南南東)であることが検出されることになる。その場合、受信強度により車両1までの距離も検出される。
【0032】
そしてステップR6では、地磁気センサ21により絶対方位を検出して、絶対方位と始動キー3の向きK(図7)との角度のずれを検出する。
【0033】
ステップR6では、図7に示すよう、車両1の方位を示す矢印マークMαA(ユーザーが位置Aにいたとしたとき)を表示する。また、この場合、絶対方位も矢印マークZにより表示し、さらに、音声出力部16により車両の方位を音声により報知する。例えば「ほぼ東南東の方向です」などと報知する。
【0034】
この後、ステップR7にて探索開始・停止スイッチ14が終了操作(開始操作の次は終了操作とみなすものである)されるか、または、ステップR8にて一定時間が経過するかすれば、この制御を終了する。
【0035】
このように本実施例によれば、車両1側において、地磁気センサ11により絶対方位を検出し、制御部6により、送受信部9が出力する方位識別信号の指向方向を前記絶対方位に基づいて合わせるようにしている。この結果、始動キー3に搭載された送受信部20が方位識別信号を受信すると、制御部17は、この信号の出所の方位つまり車両1の存在場所の方位を絶対方位で検出することができる。そして、この検出された車両1の方位を表示部15及び音声出力部16により報知するから、この結果、始動キー3からみて車両1の位置を絶対方位でユーザーに報知することができ、ユーザーからみて車両位置検出を正確に行なうことができる。しかも車両1と始動キー3との間で直接送受信するから、GPS電波を使用する場合とは違って広い立体駐車場などのGPS電波の届かない状況でも車両位置検出を行なうことができる。
【0036】
また、本実施例によれば、方位識別信号Sn、Se、Ss、Swの受信強度分布に基づいて起動キー3に対する前記車両1の方位を検出するようにしたから、これら方位識別信号が東西南北の4方位を示す4種類の方位識別信号であっても、その4方位の間の方位なども検出できる。
【0037】
さらに、方位識別信号Sn、Se、Ss、Swの受信強度に基づいて始動キー3に対する車両1の離間距離を検出するようにし、報知するようにしたから、始動キー3(ユーザー)から車両1までの距離も報知できて、便利である。
【0038】
さらにまた、前記車両1側の送受信部9が、異なる方向に向く複数の指向性アンテナ10n、10e、10s、10wを備え、車両1の車載器2がこれら指向性アンテナ10n、10e、10s、10wの向きを変更させる回動駆動用モータ12を備え、前記指向性アンテナ10n、10e、10s、10wを、地磁気センサ11から得た絶対方位と合致させるように前記回動駆動用モータ12により向き調整するようにしたから、車両1の停車向きがどの方位を指向しても、これらアンテナ10n、10e、10s、10wを、設定された方位方向に確実に合わせることができる。
【0039】
また、前記携帯器を車両1の駐車時に必ず携帯する始動キー3としたから、持ち忘れることがない。
【0040】
さらにまた、始動キー3に、絶対方位を検出する地磁気センサ21を設け、報知手段を、車両1の方位を矢印(この実施例では矢印マークMαA)により表示する表示部15から構成し、前記地磁気センサ21により検出された絶対方位と、該始動キー3において検出された車両1の方位とに基づいて、始動キー3に対する前記矢印の相対的な向きを決定するようにしたから、始動キー3の向きがどの方位を向いていても、車両1が位置する方位を確実に矢印にて表示することができる。
【0041】
また、表示部15に絶対方位も表示するようにしたから、実用上便利である。
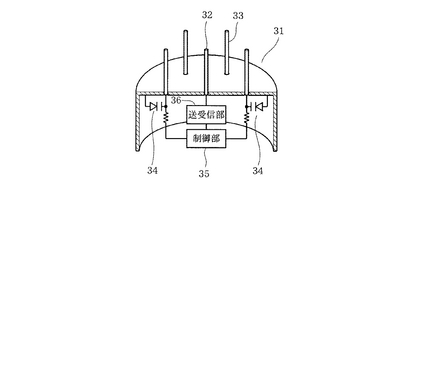
図9及び図10は本発明の第2の実施例を示し、この第2の実施例では、車両1側の送受信部9が、可変指向性アンテナたる可変指向性アンテナ31を有する点が第1の実施例と異なる。このマルチアレーアンテナ31は、無線信号が給電される主放射素子32と、その周りに配設された複数例えば6個のピン33(4個のみ図示)とから構成されており、このピン33はそれぞれ可変容量ダイオード(バリキャップ)34を介して制御部35に接続されている。主放射素子32は送受信部36に接続されている。
【0042】
制御部35はこれら6個の可変容量ダイオード34に印加する直流電圧の組み合わせにより様々な指向性を得ることができる。
【0043】
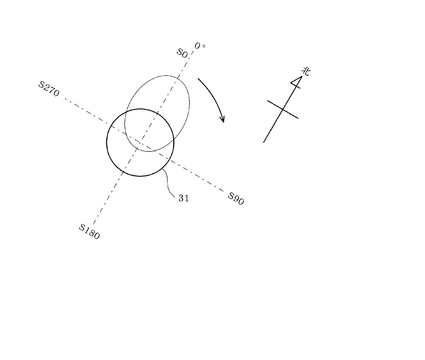
制御部35は、図10に示すように、絶対方位の「北」(方位0度)から例えば時計回りに方位を1度(deg)づつ指向性を変化させた360個の方位識別信号S0〜S359を順次出力させるようになっている。始動キー3側の送受信部20で最も強い受信強度の方位識別信号に基づいて、車両の方位を検出する。
【0044】
この実施例によると、車両1の停車向きがどの方位を指向しても、アンテナを動かすことなく、設定された方位方向に確実に方位識別信号を出力できる。
【0045】
なお、可変指向性アンテナとしてはフェーズドアレーアンテナでも良い。また、携帯器としては、始動キー以外のものでもよく、例えば電話やPDAなどの携帯端末でも良い。報知手段としては、表示部のみでも良い。
【図面の簡単な説明】
【0046】
【図1】本発明の第1の実施例を示す車両探索システムの電気的構成のブロック図
【図2】車載器を組み込んだ車両を示す平面図
【図3】始動キーの平面図
【図4】車両側の制御部の制御内容を示すフローチャート
【図5】始動キー側の制御部の制御内容を示すフローチャート
【図6】(a)は向き調整前の車載器本体の平面図、(b)は向き調整後の車載器本体の平面図
【図7】表示例を説明するための始動キー及び車両の平面図
【図8】車両検出方式を説明するための図
【図9】本発明の第2の実施例を示すアンテナの原理図
【図10】電波の指向方向の切替を説明するための図
【符号の説明】
【0047】
図面中、1は車両、2は車載器、3は始動キー(携帯器)、4は車両探索システム、5は車載器本体、6は制御部(方位調整手段)、9は送受信部(車両側無線通信手段)、10n、10e、10s、10wはアンテナ、11は地磁気センサ(方位検出手段)、12は回動駆動用モータ(駆動手段)、14は探索開始・停止スイッチ、15は表示部(報知手段)、16は音声出力部(報知手段)、17制御部(車両検出手段)、20は送受信部(携帯器側無線通信手段)、31はアンテナを示す。
【技術分野】
【0001】
本発明は、駐車車両から離れたユーザーが該車両の位置方向を検知することが可能な車両探索システムに関する。
【背景技術】
【0002】
この種の車両探索システムとしては、無線通信機を利用して、ユーザー(ドライバ)が携帯した送信機から、車両の受信機に、自車位置を検知するための指令を送信し、車両側では、この指令を受け取ると車両のライトの点灯や、ホーンの鳴動により自車位置を報知するものがある(特許文献1)。
【0003】
また、車両の停車時に、車の位置情報を、GPS機能付きキーに組み込んだメモリに記憶させ、該キーのGPS機能により車両位置への案内機能により、車両の位置にまでユーザーを誘導する方式のものもある(特許文献2)。
【0004】
さらに、ユーザーが携帯する複数のアンテナ付き受信機により、車両側の発信機の電波を受信し、この電波の電界強度の差により車両の位置と方向とを検出する方式のものもある(特許文献3)。
【特許文献1】特開平5−328461号公報
【特許文献2】特開平6−84092号公報
【特許文献3】特開平10−232999号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、これら特許文献1〜3のものは、いずれも、屋外の駐車場での使用を対象としており、特に、特許文献1、3に記載のものでは、絶対方位を報知するものではないので、車両の方向精度が低く、またマルチパルスの影響を受け易く、また、特許文献2のものでは、室内の駐車場(特に広い立体駐車場など)では、GPS電波が届かずに使用が困難であった。
【0006】
本発明は上述の事情に鑑みてなされたものであり、その目的は、車両位置検出を、正確に、しかもGPS電波の届かないような状況でも行い得る車両探索システムを提供するにある。
【課題を解決するための手段】
【0007】
上述の目的を達成するために、請求項1の発明は、車両に搭載され、絶対方位を検出することが可能な方位検出手段と、前記車両に搭載され、設定された複数の方位方向にそれぞれ異なる方位識別信号を出力する車両側無線通信手段と、前記車両に搭載され、前記方位検出手段により検出された絶対方位に基づいて前記方位識別信号の出力方位方向を前記設定された方位方向に合わせる方位調整手段と、携帯可能な携帯器と、この携帯器に設けられ前記車両側無線送信部から出力された方位識別信号を受信可能な携帯器側無線通信手段と、前記携帯器に設けられ、受信した方位識別信号に基づいて、該携帯器に対する前記車両の方位を検出する車両検出手段と、前記携帯器に設けられ、前記車両検出手段により検出された車両の方位を報知する報知手段とを備えてなる。
【0008】
これによれば、車両側において、方位検出手段により絶対方位を検出し、方位調整手段により、車両側無線通信手段が出力する方位識別信号の方位方向(指向方向)を前記絶対方位に基づいて前記設定した方位方向に合わせる。この結果、携帯器に搭載された携帯器側無線通信手段が方位識別信号を受信すると、車両検出手段がその方位識別信号により、当該信号の出所の方位つまり車両の存在場所の方位を絶対方位で検出することができる。検出された車両の方位は報知により報知される。この結果、携帯器からみて車両の位置を絶対方位でユーザーに報知することが可能となり、ユーザーからみて車両位置検出を正確に行なうことができる。しかも車両と携帯器との間で直接送受信するから、GPS電波を使用する場合とは違って広い立体駐車場などのGPS電波の届かない状況でも車両位置検出を行なうことができる。
【0009】
この場合、前記車両検出手段は、方位識別信号の受信強度分布に基づいて携帯器に対する前記車両の方位を検出するものでも良い(請求項2の発明)。このようにすると、例えば、方位識別信号が東西南北の4方位を示す4種類の方位識別信号であった場合に、その4方位の間の方位なども検出可能となる。
【0010】
また、前記車両検出手段が、方位識別信号の受信強度に基づいて携帯器に対する前記車両の離間距離を検出し、前記報知手段が、車両の方位の他に、この検出された距離も報知するようにしても良い(請求項3の発明)。このようにすると、携帯器(ユーザー)から車両までの距離も報知できて、便利である。
【0011】
さらにまた、前記車両側無線通信手段が、異なる方向に向く複数の指向性アンテナを備え、方位調整手段が、これら指向性アンテナの向きを変更させる駆動手段を備え、前記指向性アンテナを、前記方位検出手段から得た絶対方位と合致させるように前記駆動手段により向き調整するようにしても良く(請求項4の発明)、このようにすると、車両の停車向きがどの方位を指向しても、複数のアンテナをから設定された方位方向に確実に合わせることができる。
【0012】
また、車両側無線送信部が、可変指向性アンテナを有してなり、前記方位検出手段から得た絶対方位に基づいて、この可変指向性アンテナから、設定された方位方向に当該方位に対応する方位識別信号を出力するようにしても良く(請求項5の発明)、このようにすると、車両の停車向きがどの方位を指向しても、アンテナを動かすことなく、設定された方位方向に確実に方位識別信号を出力できる。
【0013】
また、前記報知手段が、表示部又は音声出力部の少なくとも一方を備えているようにしても良い(請求項6の発明)。
【0014】
また、前記携帯器は、車両の始動キーであっても良く(請求項7の発明)、これによれば、車両の駐車時に必ず携帯するものであるから、持ち忘れることがない。
【0015】
さらにまた、携帯器には、絶対方位を検出する携帯器側方位検出手段を備え、報知手段が、車両の方位を矢印により表示する表示部から構成され、前記携帯器側方位検出手段により検出された絶対方位と、該携帯器の車両方位検出手段により検出された車両の方位とに基づいて、携帯器に対する前記矢印の相対的な向きを決定するようにしても良い(請求項8の発明)。このようにすると、携帯器の向きがどの方位を向いていても、車両が位置する方位を確実に矢印にて表示することができる。
【発明を実施するための最良の形態】
【0016】
以下、本発明の第1の実施例につき図1ないし図8を参照して説明する。図1には、車両1(図2参照)に搭載された車載器2と、携帯器たる始動キー3とを示している。この車載器2と始動キー3とで、車両探索システム4を構成している。
【0017】
車載器2には、車載器本体5に、制御部6、変復調部7、A/D変換部8、車両側無線通信手段たる送受信部9、複数例えば4つのアンテナ10n、10e、10s、10w、地磁気センサ11が設けられており、これらは電気的に接続されている。また上記4つのアンテナ10n、10e、10s、10wは平面視にて90度の角度ピッチで設けられている。前記車載器本体5は車両1の適宜部位に中心部を回動中心として回動し得るように設けられており、駆動手段たる回動駆動用モータ12により回動される構成となっている。このモータ12は前記制御部6により制御されるようになっている。
【0018】
前記制御部6は、CPUや、ROM及びRAMなどのメモリなどを備えてなり、方位調整手段として機能する。この制御部6は、該車載器2及び始動キー3を相互に認識するための固有IDを記憶していると共に、方位識別のためのコードとして4つの方位識別コードCn、Ce、Cs、Cwを記憶しており、そのうち、コードCnは、この送受信部9から出力された信号が該車載器2から北方向へ指向することを識別するためであり、以下、コードCeは東方向へ、コードCsは南方向へ、コードCwは西方向へ指向することを識別するためのものである。
【0019】
前記変復調部7は、復調機能、及び変調機能を備えてなり、送受信部9において受信し増幅した受信信号を復調して、後述する探索指令を制御部6に供給する。また、変復調部7は、制御部6から固有IDや方位識別コードCn、Ce、Cs、Cwが与えられると、所定周波数の搬送波にこれら固有IDや方位識別コードCn、Ce、Cs、Cwを乗せるように変調して固有IDを含む方位識別信号Sn、Se、Ss、Swを出力する。この場合、方位識別信号Sn、Se、Ss、Swはそれぞれアンテナ10n、10e、10s、10wから出力されるようになっている。なお、無線通信形態はBluetoothでも無線LANでも良い。
【0020】
前記地磁気センサ11は方位検出手段たるものであり、東西南北の絶対方位を検出するものであり、車載器本体5の方位のずれ角度情報を制御部6に供給する。制御部6は、このずれ角度が無くなるように回動駆動用モータ12を駆動制御して車載器本体5の方位を設定方位(各アンテナ10n、10e、10s、10wが北、東、南、西の指向性電波を出力する方位)に調整する(方位調整手段)。
【0021】
図3に示すように、始動キー3はキー部3a及び基部3bを備えており、この基部3bには、ドアロック、アンロックをするためのロック・アンロックスイッチ13を備えていると共に、ユーザーにより操作されると探索要求指令・停止指令を発生する探索開始・停止スイッチ14を備えている。さらに、この基部3bには、例えばLCDからなる表示部15が設けられていると共に音声出力部16が設けられている。これら表示部15及び音声出力部16は報知手段たるものである。
【0022】
さらに、上記基部3bには、図1に示す電子回路がモールドされている。この電子回路には、車両探索に関連する回路構成を示している。この電子回路には、車両検出手段たる制御部17、変復調部18、A/D変換部19、携帯器側無線通信手段たる送受信部20、地磁気センサ21、表示部15を駆動制御する表示制御部22、音声出力部16を駆動制御する音声処理部23、前述の表示部15、音声出力部16、探索開始・停止スイッチ14が含まれている。
【0023】
上記始動キー3の制御部17は、CPUや、ROM及びRAMなどのメモリなどを備えてなり、車両検出手段として機能する。この制御部17は、車載器2を認識するための固有IDを記憶していると共に、前述した方位識別のためのコードとして4つの方位識別コードCn、Ce、Cs、Cwを記憶している。
【0024】
前記変復調部18は、復調機能、及び変調機能を備えてなり、送受信部20において無指向性のアンテナ20aを介して受信し増幅した受信信号を復調して、後述する車載器2からの応答を制御部17に供給する。また、この変復調部18は、探索開始・停止スイッチ14から制御部17に探索要求指令が与えられると、この制御部17からこの探索要求指令を受けて、所定周波数の搬送波に固有IDや探索要求指令を含むコードを乗せるように変調して探索要求指令信号Saを出力し、また、探索停止指令が与えられると、探索停止指令信号Sbを同様に出力する。この場合、探索要求信号は無指向性のアンテナ20aから出力されるようになっている。
【0025】
前記地磁気センサ21は携帯器側方位検出手段たるものであり、東西南北の絶対方位を検出するものであり、始動キー3自身の基準方向(図7の矢印K方向)に対する方位のずれ角度情報を制御部17に供給する。制御部17は、このずれ角度と、後述する車両検出手段により検出された車両の方位とに応じて、表示部15に、車両の方位(始動キー3からみた方位)を示す矢印を表示させると共に、音声出力部16に車両の方位(始動キー3からみた方位)を音声により報知するものである。
【0026】
さて、前記車載器2の制御部6の制御内容と始動キー3の制御部17の制御内容について説明する。まず、車載器2の制御部6の制御内容について図4を参照して説明する。図4の制御は、始動キー3が抜かれたときに開始される。まず、ステップP1では、始動キー3からの探索要求指令信号Saの受信があるか否かを判断する。この場合、各アンテナ10n、10e、10s、10wを使用して受信する。受信があると、ステップP2で、固有IDが一致すれば、ステップP3で、地磁気センサ11により絶対方位を検出して、車載器本体5の向き(図6(a)のQ方向の向き)と絶対方位「北」との角度のずれを検出し、ステップP4で、回動駆動用モータ12を駆動制御して車載器本体5の向きQが北方向を向くように方位調整する。これにより、図2及び図6(a)において、車両1の向きとほぼ同じ向きにあった車載器本体5が図7及び図6(b)に示すように北向きに回動する。これにより各アンテナ10n、10e、10s、10wの電波出力方向が北、東、南、西方向に合致するようになる。
【0027】
そして、ステップP5で各アンテナ10n、10e、10s、10wから順次方位識別信号Sn、Se、Ss、Swを出力する。
【0028】
次のステップP6で、終了条件満足か否かを判断する。この終了条件は、例えば、前記始動キー3からの探索停止信号Sbを受信したこと、最初の受信(ステップP1の「YES」)から一定時間が経過したこと、車両のドアがアンロックされたことのいずれかである。
【0029】
次に、図5において、始動キー3の制御部17の制御内容について説明する。図5に示した制御は始動キー3の抜き取りにより開始される。ステップR1では、探索開始・停止スイッチ14が開始操作(最初のオンで開始)されたか否かを判断し、操作されれば、ステップR2で探索要求指令信号Saを出力する。
【0030】
ステップR3で車載器2からの方位識別信号Sn、Se、Ss、Swのいずれかを受信すると、ステップR4で、固有IDが一致したか否かを判断し、一致すれば、ステップR5で受信した信号の強度分布及び強度に基づいて車載器2の方位(車両1の方位)及び離間距離を検出する。すなわち、方位識別信号Snを受信すると復調したときに方位識別コードCnを識別することから、方位「北」方向へ出力された信号であることを制御部17が認識する。以下、同様に、方位識別信号Seの場合は「東」方向へ出力されたことを示す方位識別コードCeを識別し、方位識別信号Ssの場合は「南」方向へ出力されたことを示す方位識別コードCsを識別し、方位識別信号Swの場合は「西」方向へ出力されたことを示す方位識別コードCwを識別することになる。
【0031】
例えば、図8に示すように、始動キー3を携帯しているユーザーが位置Aにいた場合には、車両1からの方位識別信号Sn、Swが受信される。この場合、方位「北」を示す方位識別信号Snの受信強度がANで、方位「西」を示す方位識別信号Swの受信強度がAWとなり、この受信強度分布により車両1はユーザーAからみて方位αA方向(ほぼ東南東)であることが検出されることになる。その場合、受信強度により車両1までの距離も検出される。また、ユーザーが位置Bにいた場合には方位「北」を示す方位識別信号Snの受信強度がBNで、方位「西」を示す方位識別信号Swの受信強度がBWとなり、この受信強度分布により車両1はユーザーAからみて方位αB方向(ほぼ南南東)であることが検出されることになる。その場合、受信強度により車両1までの距離も検出される。
【0032】
そしてステップR6では、地磁気センサ21により絶対方位を検出して、絶対方位と始動キー3の向きK(図7)との角度のずれを検出する。
【0033】
ステップR6では、図7に示すよう、車両1の方位を示す矢印マークMαA(ユーザーが位置Aにいたとしたとき)を表示する。また、この場合、絶対方位も矢印マークZにより表示し、さらに、音声出力部16により車両の方位を音声により報知する。例えば「ほぼ東南東の方向です」などと報知する。
【0034】
この後、ステップR7にて探索開始・停止スイッチ14が終了操作(開始操作の次は終了操作とみなすものである)されるか、または、ステップR8にて一定時間が経過するかすれば、この制御を終了する。
【0035】
このように本実施例によれば、車両1側において、地磁気センサ11により絶対方位を検出し、制御部6により、送受信部9が出力する方位識別信号の指向方向を前記絶対方位に基づいて合わせるようにしている。この結果、始動キー3に搭載された送受信部20が方位識別信号を受信すると、制御部17は、この信号の出所の方位つまり車両1の存在場所の方位を絶対方位で検出することができる。そして、この検出された車両1の方位を表示部15及び音声出力部16により報知するから、この結果、始動キー3からみて車両1の位置を絶対方位でユーザーに報知することができ、ユーザーからみて車両位置検出を正確に行なうことができる。しかも車両1と始動キー3との間で直接送受信するから、GPS電波を使用する場合とは違って広い立体駐車場などのGPS電波の届かない状況でも車両位置検出を行なうことができる。
【0036】
また、本実施例によれば、方位識別信号Sn、Se、Ss、Swの受信強度分布に基づいて起動キー3に対する前記車両1の方位を検出するようにしたから、これら方位識別信号が東西南北の4方位を示す4種類の方位識別信号であっても、その4方位の間の方位なども検出できる。
【0037】
さらに、方位識別信号Sn、Se、Ss、Swの受信強度に基づいて始動キー3に対する車両1の離間距離を検出するようにし、報知するようにしたから、始動キー3(ユーザー)から車両1までの距離も報知できて、便利である。
【0038】
さらにまた、前記車両1側の送受信部9が、異なる方向に向く複数の指向性アンテナ10n、10e、10s、10wを備え、車両1の車載器2がこれら指向性アンテナ10n、10e、10s、10wの向きを変更させる回動駆動用モータ12を備え、前記指向性アンテナ10n、10e、10s、10wを、地磁気センサ11から得た絶対方位と合致させるように前記回動駆動用モータ12により向き調整するようにしたから、車両1の停車向きがどの方位を指向しても、これらアンテナ10n、10e、10s、10wを、設定された方位方向に確実に合わせることができる。
【0039】
また、前記携帯器を車両1の駐車時に必ず携帯する始動キー3としたから、持ち忘れることがない。
【0040】
さらにまた、始動キー3に、絶対方位を検出する地磁気センサ21を設け、報知手段を、車両1の方位を矢印(この実施例では矢印マークMαA)により表示する表示部15から構成し、前記地磁気センサ21により検出された絶対方位と、該始動キー3において検出された車両1の方位とに基づいて、始動キー3に対する前記矢印の相対的な向きを決定するようにしたから、始動キー3の向きがどの方位を向いていても、車両1が位置する方位を確実に矢印にて表示することができる。
【0041】
また、表示部15に絶対方位も表示するようにしたから、実用上便利である。
図9及び図10は本発明の第2の実施例を示し、この第2の実施例では、車両1側の送受信部9が、可変指向性アンテナたる可変指向性アンテナ31を有する点が第1の実施例と異なる。このマルチアレーアンテナ31は、無線信号が給電される主放射素子32と、その周りに配設された複数例えば6個のピン33(4個のみ図示)とから構成されており、このピン33はそれぞれ可変容量ダイオード(バリキャップ)34を介して制御部35に接続されている。主放射素子32は送受信部36に接続されている。
【0042】
制御部35はこれら6個の可変容量ダイオード34に印加する直流電圧の組み合わせにより様々な指向性を得ることができる。
【0043】
制御部35は、図10に示すように、絶対方位の「北」(方位0度)から例えば時計回りに方位を1度(deg)づつ指向性を変化させた360個の方位識別信号S0〜S359を順次出力させるようになっている。始動キー3側の送受信部20で最も強い受信強度の方位識別信号に基づいて、車両の方位を検出する。
【0044】
この実施例によると、車両1の停車向きがどの方位を指向しても、アンテナを動かすことなく、設定された方位方向に確実に方位識別信号を出力できる。
【0045】
なお、可変指向性アンテナとしてはフェーズドアレーアンテナでも良い。また、携帯器としては、始動キー以外のものでもよく、例えば電話やPDAなどの携帯端末でも良い。報知手段としては、表示部のみでも良い。
【図面の簡単な説明】
【0046】
【図1】本発明の第1の実施例を示す車両探索システムの電気的構成のブロック図
【図2】車載器を組み込んだ車両を示す平面図
【図3】始動キーの平面図
【図4】車両側の制御部の制御内容を示すフローチャート
【図5】始動キー側の制御部の制御内容を示すフローチャート
【図6】(a)は向き調整前の車載器本体の平面図、(b)は向き調整後の車載器本体の平面図
【図7】表示例を説明するための始動キー及び車両の平面図
【図8】車両検出方式を説明するための図
【図9】本発明の第2の実施例を示すアンテナの原理図
【図10】電波の指向方向の切替を説明するための図
【符号の説明】
【0047】
図面中、1は車両、2は車載器、3は始動キー(携帯器)、4は車両探索システム、5は車載器本体、6は制御部(方位調整手段)、9は送受信部(車両側無線通信手段)、10n、10e、10s、10wはアンテナ、11は地磁気センサ(方位検出手段)、12は回動駆動用モータ(駆動手段)、14は探索開始・停止スイッチ、15は表示部(報知手段)、16は音声出力部(報知手段)、17制御部(車両検出手段)、20は送受信部(携帯器側無線通信手段)、31はアンテナを示す。
【特許請求の範囲】
【請求項1】
車両に搭載され、絶対方位を検出することが可能な方位検出手段と、
前記車両に搭載され、設定された複数の方位方向にそれぞれ異なる方位識別信号を出力する車両側無線通信手段と、
前記車両に搭載され、前記方位検出手段により検出された絶対方位に基づいて前記各方位識別信号の出力方位方向を前記設定された方位方向に合わせる方位調整手段と、
携帯可能な携帯器と、
この携帯器に設けられ前記車両側無線送信部から出力された方位識別信号を受信可能な携帯器側無線通信手段と、
前記携帯器に設けられ、受信した方位識別信号に基づいて、該携帯器に対する前記車両の方位を検出する車両検出手段と、
前記携帯器に設けられ、前記車両検出手段により検出された車両の方位を報知する報知手段とを備えたことを特徴とする車両探索システム。
【請求項2】
請求項1に記載の車両探索システムにおいて、
前記車両検出手段は、方位識別信号の受信強度分布に基づいて携帯器に対する前記車両の方位を検出することを特徴とする車両探索システム。
【請求項3】
請求項1又は2に記載の車両探索システムにおいて、
前記車両検出手段は、方位識別信号の受信強度に基づいて携帯器に対する前記車両の離間距離を検出し、
前記報知手段は、車両の方位の他に、この検出された距離も報知することを特徴とする車両探索システム
【請求項4】
請求項1ないし3のいずれかに記載の車両探索システムにおいて、
前記車両側無線通信手段は、異なる方向に向く複数の指向性アンテナを備え、
方位調整手段は、これら指向性アンテナの向きを変更させる駆動手段を備え、前記指向性アンテナを、前記方位検出手段から得た絶対方位と合致させるように前記駆動手段により向き調整することを特徴とする車両探索システム。
【請求項5】
請求項1ないし3のいずれかに記載の車両探索システムにおいて、
車両側無線送信部は、可変指向性アンテナを有してなり、前記方位検出手段から得た絶対方位に基づいて、この可変指向性アンテナから、設定された方位方向に当該方位に対応する方位識別信号を出力することを特徴とする車両探索システム。
【請求項6】
請求項1ないし5のいずれかに記載の車両探索システムにおいて、
前記報知手段は、表示部又は音声出力部の少なくとも一方を備えていることを特徴とする車両探索システム。
【請求項7】
請求項1ないし6のいずれかに記載の車両探索システムにおいて、
携帯器は、車両の始動キーであることを特徴とする車両探索システム。
【請求項8】
請求項1ないし7のいずれかに記載の車両探索システムにおいて、
携帯器には、絶対方位を検出する携帯器側方位検出手段を備え、
報知手段は、車両の方位を矢印により表示する表示部から構成され、
前記携帯器側方位検出手段により検出された絶対方位と、該携帯器の車両方位検出手段により検出された車両の方位とに基づいて、携帯器に対する前記矢印の相対的な向きを決定することを特徴とする車両探索システム。
【請求項1】
車両に搭載され、絶対方位を検出することが可能な方位検出手段と、
前記車両に搭載され、設定された複数の方位方向にそれぞれ異なる方位識別信号を出力する車両側無線通信手段と、
前記車両に搭載され、前記方位検出手段により検出された絶対方位に基づいて前記各方位識別信号の出力方位方向を前記設定された方位方向に合わせる方位調整手段と、
携帯可能な携帯器と、
この携帯器に設けられ前記車両側無線送信部から出力された方位識別信号を受信可能な携帯器側無線通信手段と、
前記携帯器に設けられ、受信した方位識別信号に基づいて、該携帯器に対する前記車両の方位を検出する車両検出手段と、
前記携帯器に設けられ、前記車両検出手段により検出された車両の方位を報知する報知手段とを備えたことを特徴とする車両探索システム。
【請求項2】
請求項1に記載の車両探索システムにおいて、
前記車両検出手段は、方位識別信号の受信強度分布に基づいて携帯器に対する前記車両の方位を検出することを特徴とする車両探索システム。
【請求項3】
請求項1又は2に記載の車両探索システムにおいて、
前記車両検出手段は、方位識別信号の受信強度に基づいて携帯器に対する前記車両の離間距離を検出し、
前記報知手段は、車両の方位の他に、この検出された距離も報知することを特徴とする車両探索システム
【請求項4】
請求項1ないし3のいずれかに記載の車両探索システムにおいて、
前記車両側無線通信手段は、異なる方向に向く複数の指向性アンテナを備え、
方位調整手段は、これら指向性アンテナの向きを変更させる駆動手段を備え、前記指向性アンテナを、前記方位検出手段から得た絶対方位と合致させるように前記駆動手段により向き調整することを特徴とする車両探索システム。
【請求項5】
請求項1ないし3のいずれかに記載の車両探索システムにおいて、
車両側無線送信部は、可変指向性アンテナを有してなり、前記方位検出手段から得た絶対方位に基づいて、この可変指向性アンテナから、設定された方位方向に当該方位に対応する方位識別信号を出力することを特徴とする車両探索システム。
【請求項6】
請求項1ないし5のいずれかに記載の車両探索システムにおいて、
前記報知手段は、表示部又は音声出力部の少なくとも一方を備えていることを特徴とする車両探索システム。
【請求項7】
請求項1ないし6のいずれかに記載の車両探索システムにおいて、
携帯器は、車両の始動キーであることを特徴とする車両探索システム。
【請求項8】
請求項1ないし7のいずれかに記載の車両探索システムにおいて、
携帯器には、絶対方位を検出する携帯器側方位検出手段を備え、
報知手段は、車両の方位を矢印により表示する表示部から構成され、
前記携帯器側方位検出手段により検出された絶対方位と、該携帯器の車両方位検出手段により検出された車両の方位とに基づいて、携帯器に対する前記矢印の相対的な向きを決定することを特徴とする車両探索システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2006−125983(P2006−125983A)
【公開日】平成18年5月18日(2006.5.18)
【国際特許分類】
【出願番号】特願2004−314005(P2004−314005)
【出願日】平成16年10月28日(2004.10.28)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年5月18日(2006.5.18)
【国際特許分類】
【出願日】平成16年10月28日(2004.10.28)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]