
車両接近報知システム
【課題】車両の接近をより適切に報知することのできる車両接近報知システムを提供する。
【解決手段】制御装置20は、撮像装置10から入力された画像情報に基づいて歩行者の有無及び顔の向きを検出し、歩行者を検出できたが歩行者の顔を検出できなかったことに基づいて車両の接近を報知する必要があると判断する。また、制御装置20は、当該制御装置20に接続された接近音出力装置30に対し、車両の接近を報知する必要の有無についての判断結果を出力し、接近音出力装置30は、車両の接近を報知する必要があるとの判断結果が入力された場合には車両接近音を出力する一方、車両の接近を報知する必要がないとの判断結果が入力された場合には車両接近音を出力しない。
【解決手段】制御装置20は、撮像装置10から入力された画像情報に基づいて歩行者の有無及び顔の向きを検出し、歩行者を検出できたが歩行者の顔を検出できなかったことに基づいて車両の接近を報知する必要があると判断する。また、制御装置20は、当該制御装置20に接続された接近音出力装置30に対し、車両の接近を報知する必要の有無についての判断結果を出力し、接近音出力装置30は、車両の接近を報知する必要があるとの判断結果が入力された場合には車両接近音を出力する一方、車両の接近を報知する必要がないとの判断結果が入力された場合には車両接近音を出力しない。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の接近を報知する車両接近報知システムに関する。
【背景技術】
【0002】
モータ及びエンジンを動力源とするハイブリッド自動車、モータを動力源とする電気自動車、エンジン室を防音構造としてエンジン音の車両外への漏洩を低減した自動車等、走行時の騒音が低い低騒音車両が知られている。この低騒音車両の特徴である低騒音に起因して、歩行者との接触事故の増加が懸念されている。
【0003】
その対策として、車両の接近を音により報知することが提案されている。ただし、音により報知し続けると騒音になってしまうことから、車両の速度、歩行者の有無、車両が交差点付近に位置する等により、音の大きさを変更したり、音による報知を停止したりすることが提案されている。
【0004】
しかしながら、車両の接近に気付いている歩行者に対して報知することはその歩行者に不快であり、不要である。
【0005】
そこで、従来、特許文献1には、物標を検知するレーダと、物標の画像を取得する赤外線カメラとを備え、これらレーダ及び赤外線カメラによって取得されるデータに基づき歩行者を認識し、その認識された歩行者の移動方向に自車両の進行方向に対して直角な成分が含まれる場合に限定して接近音を出力する技術が記載されている。これにより、歩行者が車両の接近に気付いている場合には接近音を出力せず、接触の可能性があり危険と判断される場合に限定して接近音を出力することができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−197720号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記従来の技術では、自車両の進行方向に対して直角な成分が歩行者の移動方向に含まれている場合を、歩行者が車両の接近に気付いていない場合とみなしている。
【0008】
しかしながら、自車両が走行する車線脇に立って横断しようとしている歩行者が、自車両が走行する車線(走行道路)と反対の車線に顔を向け(したがって自車両に顔を向けていない)その車線を通行する車両に気を取られ、自車両の接近に気付いていない場合のように、歩行者が移動していなくても車両の接近に気付いていない場合がある。歩行者が移動していなくても車両の接近に気付いていない場合、自車両が走行する車線に歩行者が飛び出してくることが考えられるため、車両の接近を報知すべきであるものの、上記従来の技術では、歩行者が移動していないことから、歩行者に車両の接近を報知することができない。このように、上記従来の技術には、依然として改善の余地が残されている。
【0009】
本発明は、上記実情に鑑みてなされたものであって、車両の接近をより適切に報知することのできる車両接近報知システムを提供することにある。
【課題を解決するための手段】
【0010】
こうした目的を達成するため、請求項1に記載の発明では、車両の周辺に位置する歩行者の有無及びその状態を検出する歩行者状態検出部と、歩行者状態検出部によって検出された歩行者の有無及びその状態に基づいて、車両の接近を報知する必要の有無を判断する報知要否判断部と、報知要否判断部によって車両の接近を報知する必要があると判断された場合には車両の接近を報知する接近報知部とを備える車両接近報知システムにおいて、歩行者状態検出部は、歩行者の顔を検出できるか否かにより、歩行者の状態として顔の向きを検出し、報知要否判断部は、歩行者状態検出部によって歩行者を検出できたがその歩行者の顔を検出できなかったことに基づいて、車両の接近を報知する必要があると判断することとした。
【0011】
車両接近報知システムとしての上記構成では、報知要否判断部は、歩行者状態検出部によって歩行者の顔を検出できなかったことに基づいて車両の接近を報知する必要があると判断する。ここで、歩行者の顔を検出できなかった場合とは、歩行者が車両を見ていないことから、その歩行者は車両の接近に気付いていない可能性が高いため、報知要否判断部は、このような場合に車両の接近を報知する必要があると判断する。そして、接近報知部は、報知要否判断部によって車両の接近を報知する必要があると判断された場合に車両の接近を報知する。したがって、歩行者が移動していなければ車両の接近を報知することのできない上記従来技術と比較して、車両の接近をより適切に報知することができるようになる。
【0012】
歩行者状態検出部によって所定範囲内に所定人数以上の歩行者が検出された場合、その全員の顔を検出することは難しく、その全員の顔を検出できたとしても、歩行者間の会話等に夢中で車両の接近に気付いていない歩行者が含まれている可能性もある。
【0013】
そこで、請求項2に記載の発明のように、歩行者状態検出部は、歩行者の有無及びその顔に加え、歩行者の数を検出し、報知要否判断部は、歩行者状態検出部によって所定範囲内に所定人数以上の歩行者が検出された場合には、歩行者の顔を検出できたか否かに関わらず、車両の接近を報知する必要があると判断するとよい。これにより、歩行者状態検出部によって所定範囲内に所定人数以上の歩行者が検出された場合には、歩行者の顔を検出できたか否かに関わらず、接近報知部によって車両の接近を報知することができるようになる。
【0014】
なお、上記所定人数として、「2人」を採用してもよい。あるいは、上記所定人数として、車両が当該車両と歩行者との離間距離を走行する時間内に、歩行者の数を検出することのできる最大の人数(例えば「7人」等)を採用してもよい。またあるいは、歩行者の顔を検出するのに必要な演算量は、歩行者の数を検出するのに必要な演算量よりも多いことから、上記所定人数として、車両が当該車両と歩行者との離間距離を走行する時間内に、歩行者の数を検出することはできるものの、その検出した歩行者全員の顔を検出することまではできない人数(例えば「3人」や「5人」等)を採用してもよい。要は、上記所定人数は任意である。また、上記所定範囲内としては、歩行者間で会話ができる範囲(例えば「数[m]」)を採用するとよい。
【0015】
歩行者状態検出部によって検出された歩行者が盲人である場合、その盲人の顔を検出できたとしても、その盲人が車両の接近に気付いていない可能性もある。また、盲人は、杖を用いて歩行したり、盲導犬と一緒に歩行したりする。
【0016】
そこで、請求項3に記載の発明のように、歩行者状態検出部は、歩行者の有無及びその顔に加え、杖を検出し、報知要否判断部は、歩行者状態検出部によって杖を所持する歩行者が検出された場合には、歩行者の顔を検出できたか否かに関わらず、車両の接近を報知する必要があると判断するとよい。あるいは、請求項4に記載の発明のように、歩行者状態検出部は、歩行者の有無及びその顔に加え、犬を検出し、報知要否判断部は、歩行者状態検出部によって犬を連れた歩行者が検出された場合には、歩行者の顔を検出できたか否かに関わらず、車両の接近を報知する必要があると判断するとよい。
【0017】
上記請求項3に記載の構成によれば、歩行者状態検出部によって杖を所持する歩行者が検出された場合には接近報知部によって車両の接近が報知されるため、検出された歩行者が盲人であっても、車両の接近を確実に報知することができるようになる。また、上記請求項4に記載の構成によれば、歩行者状態検出部によって犬を連れた歩行者が検出された場合には接近報知部によって車両の接近が報知されるため、検出された歩行者が盲人であっても、その盲人に車両の接近を報知することができるようになる。
【0018】
上記請求項1〜4のいずれか一項に記載の構成において、請求項5に記載の発明では、歩行者状態検出部は、歩行者と車両の走行道路との離間距離を逐次検出し、報知要否判断部は、歩行者状態検出部によって離間距離が大きくなる場合には、歩行者の顔を検出できたか否かに関わらず、車両の接近を報知する必要がないと判断することとした。
【0019】
上記離間距離が大きくなる場合とは、歩行者が走行道路から遠ざかることを意味することから、歩行者が車両の接近に気付いているか気付いていないかに関わらず、車両と接触する可能性は低くなる。したがって、上記請求項5に記載の発明によれば、車両の接近の不要な報知を低減することができるようになる。
【0020】
上記請求項1〜5のいずれか一項に記載の構成において、請求項6に記載の発明では、歩行者状態検出部は、車両の周辺を撮像する撮像装置と、撮像装置によって撮像された画像を解析する画像解析部とを含むこととした。画像解析部は、撮像装置によって撮像された画像を、例えばパターンマッチング等の公知の技術にて解析することにより、歩行者の検出、歩行者の顔の検出、歩行者数の検出、杖の検出、犬の検出等々を行なうことができ、例えば歩行者と車両の走行道路との間の画素数を解析する等により、歩行者と車両の走行道路との離間距離が大きくなるか否かを判断することができる。
【0021】
また、上記請求項1〜6のいずれか一項に記載の構成において、請求項7に記載の発明では、歩行者状態検出部は、車両の周辺に位置する物標との距離を超音波を用いて検出する超音波センサと、超音波センサによって得られる物標の形状を解析する形状解析部とを含むこととした。形状解析部は、物標の形状を解析することにより、歩行者の検出、歩行者の顔の検出、歩行者数の検出、杖の検出、犬の検出、歩行者と車両の走行道路との離間距離等々を行なうことができる。
【0022】
報知態様は任意であり、請求項8に記載の発明のように、接近報知部は音により報知する接近音報知部を含んでいてもよい。具体的には、接近音報知部は、例えば、擬似的な車両の走行音である擬似走行音、警報、楽曲等の音により報知する。なお、この請求項8に記載の発明は、上記請求項4に記載の構成との併用が可能であり、この場合、例えば「20〜22[kHz]」の音を発生する犬笛等を用いて、犬に対し車両の接近を報知するとよい。
【0023】
あるいは、請求項9に記載の発明のように、接近報知部は、車両の接近を光により接近光報知部を含んでいてもよい。具体的には、接近光報知部は、専用のライトの光軸を変化させる、あるいは、車両の前照灯の光軸を変化させる等して、光により車両の接近を報知してもよい。
【0024】
またあるいは、請求項10に記載の発明のように、接近報知部は、車両の接近を風により報知する接近風報知部を含んでいてもよい。具体的には、接近風報知部は、専用の送風機や空気砲等による風により車両の接近を報知してもよい。さらに、接近風報知部は、においを付加した風により車両の接近を報知してもよい。
【図面の簡単な説明】
【0025】
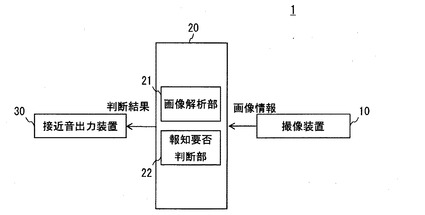
【図1】本発明に係る車両接近報知システムの一実施の形態について、その全体構成を示すブロック図である。
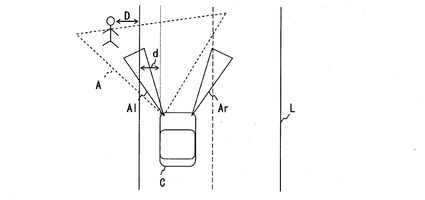
【図2】本実施の形態を構成する撮像装置の検知エリアを示す模式図である。
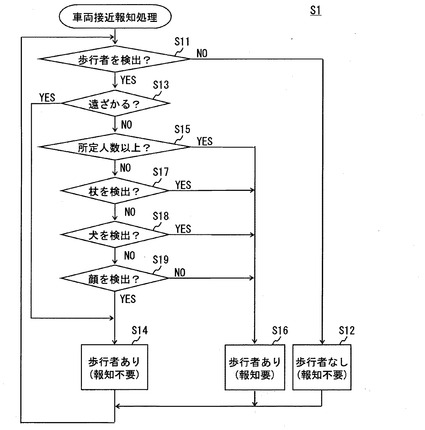
【図3】本実施の形態によって実行される車両接近報知処理について、その処理手順を示すフローチャートである。
【図4】本発明に係る車両接近報知システムの他の実施の形態について、その全体構成を示すブロック図である。
【発明を実施するための形態】
【0026】
以下、本発明に係る車両接近報知システムの一実施の形態について、図1〜図3を参照して説明する。なお、この車両接近報知システム1は、図1には図示しない車両Cに搭載されており、この車両Cには、図2に示すように、当該車両Cが走行する走行道路Lの白線から当該車両Cの車体側面までの離間距離が一定距離となるように走行する機能(いわゆるレーンキープアシスト)が搭載されている。
【0027】
図1に示されるように、車両接近報知システム1は、撮像装置10と、制御装置20と、接近音出力装置30とを備えて構成されている。制御装置20は、公知のCPU及び内蔵メモリを有して構成されるコンピュータであり、そのCPUが内蔵メモリに記憶されているプログラムを実行することによって各種機能を実現している。以下の説明では、便宜上、制御装置20は画像解析部21と報知要否判断部22とを有するものとして説明する。なお、制御装置20の内蔵メモリには、プログラムの他に、歩行者の形状パターン、歩行者の顔の形状パターン、犬の形状パターン、杖の形状パターン等、物標の形状パターンが記憶されている。撮像装置10及び画像解析部21が特許請求の範囲に記載の歩行者状態検出部に相当し、接近音出力装置30が特許請求の範囲に記載の接近音報知部に相当する。
【0028】
撮像装置10は、公知の撮像装置であり、車両Cの前進方向側に左右に1つずつ配置され、制御装置20に接続されている。詳しくは、撮像装置10は、車両の周辺の歩行者検出用エリアを撮像し、その撮像した画像の情報である画像情報を制御装置20に出力する。図2には、車両Cの前進方向側左方に配置された撮像装置10の歩行者検出用エリアAが破線にて示されている。この歩行者検出用エリアAは、車両Cの左右方向に対しては、走行道路Lに隣接する歩道を含む範囲(例えば車両Cから「10[m]」等)に予め設定されており、車両Cの前進方向に対しては、歩行者が走行道路Lに飛び出したことに気付いた運転者が車両Cにブレーキをかけてその歩行者と車両Cとが接触しない距離を含む範囲(例えば車両Cから「50[m]等)に予め設定されている。また、車両Cの前進方向側左方に配置された撮像装置10の白線検出用エリアAl及び車両Cの前進方向側右方に配置された撮像装置10の白線検出用エリアArが図示されている。この図2に示されるように、歩行者検出用エリアAは白線検出用エリアAlを含むように設定されている。なお、本実施の形態では、撮像装置10がレーンキープアシスト用の撮像装置を兼ねていることから、白線検出用エリアAlが歩行者検出用エリアAに含まれていたが、これに限らず、レーンキープアシスト用の撮像装置とは別に、歩行者検出用の撮像装置を車両に搭載してもよい。
【0029】
画像解析部21は、撮像装置10から入力された画像情報に基づいて、車両の周辺に位置する歩行者、歩行者の顔、杖、犬、歩行者と走行道路Lの白線との離間距離D、走行道路の白線から車両Cの側面までの離間距離d等々を検出する。
【0030】
詳しくは、画像解析部21は、撮像装置10から入力された画像情報のうち特に白線検出用エリアAl及びArの画像情報を解析して走行道路の白線を検出し、その検出した白線から車両Cの側面までの離間距離dを検出する。白線の検出方法や離間距離dの検出方法については公知であるため、ここでの詳しい説明を省略する。
【0031】
また、画像解析部21は、撮像装置10から入力された画像情報を解析して得られた物標の形状と上記内蔵メモリ等に記憶されている物標の形状パターンとを比較し、物標が歩行者であるか否か、歩行者である場合には所定人数以上の歩行者であるか否か、歩行者である場合には杖を所持する歩行者であるか否か、歩行者である場合には犬を連れた歩行者であるか否か、歩行者である場合には顔を検出できなかったか否か等々を公知のパターンマッチングにより検出する。また、画像解析部21は、歩行者と判断された物標から走行道路の白線までの離間距離Dを逐次検出する。
【0032】
報知要否判断部22は、画像解析部21によって検出された歩行者及びその状態に基づいて、車両の接近を報知する必要の有無を判断する。
【0033】
具体的には、報知要否判断部22は、画像解析部21によって検出された物標が歩行者であり、画像解析部21によってその歩行者の顔を検出できた場合には、車両の接近を報知する必要はないと判断する。歩行者の顔を検出できた場合とは、歩行者が車両を見ていることから、その歩行者は車両の接近に気付いている可能性が高いため、そのような歩行者に車両の接近を報知することは不快となるためである。なお、ここでの顔とは、両目を検出する等、顔の全部が好ましいが、片目を検出する等、顔の一部(すなわち横顔)でもよい。一方、報知要否判断部22は、画像解析部21によって検出された物標が歩行者であり、画像解析部21によってその歩行者の顔を検出できなかった場合には、車両の接近を報知する必要があると判断する。歩行者の顔を検出できなかった場合とは、歩行者が車両を見ていないことから、その歩行者は車両の接近に気付いていない可能性が高いためである。
【0034】
ただし、報知要否判断部22は、画像解析部21によって検出された物標が歩行者であるが、所定範囲(例えば「数[m]」)内に所定人数(例えば「7人」)以上の歩行者である場合には、歩行者の顔を検出できなかったか否かに関わらず、車両の接近を報知する必要があると判断する。画像解析部21によって所定範囲内に所定人数以上の歩行者が検出された場合、その全員の顔を検出することは難しく、その全員の顔を検出できたとしても、歩行者間の会話等に夢中で車両の接近に気付いていない歩行者が含まれている可能性もあるためである。なお、本実施の形態では、所定人数として例えば「7人」を採用したが「7人」に限らず「2人」以上であればよい。
【0035】
さらに、報知要否判断部22は、画像解析部21によって検出された物標が歩行者であるが、杖を所持する歩行者が検出された場合や犬を連れた歩行者が検出された場合には、歩行者の顔を検出できなかったか否かに関わらず、車両の接近を報知する必要があると判断する。杖を所持する歩行者が検出された場合や犬を連れた歩行者が検出された場合とは、歩行者が盲人である可能性があり、歩行者が盲人である場合、その盲人の顔を検出できたとしても、その盲人が車両の接近に気付いていない可能性もあるためである。
【0036】
また、報知要否判断部22は、画像解析部21によって検出された物標が歩行者であるが、その歩行者と判断された物標から走行道路の白線までの離間距離Dが大きくなる場合には、歩行者の顔を検出できなかったか否かに関わらず、車両の接近を報知する必要がないと判断する。上記離間距離Dが大きくなる場合とは、歩行者が走行道路Lから遠ざかることを意味することから、歩行者が車両の接近に気付いているか気付いていないかに関わらず、車両と接触する可能性は低くなるためである。なお、報知要否判断部22は、「離間距離Dが大きくなる場合」だけでなく「小さくなっていた離間距離Dが変わらなくなった場合」にも、車両の接近を報知する必要がないと判断してもよい。
【0037】
そして、報知要否判断部22は、制御装置20に接続された接近音出力装置30に対し、車両の接近を報知する必要の有無についての判断結果を出力する。
【0038】
接近音出力装置30は、車両の接近を示す接近音を出力するスピーカを含んで構成され、制御装置20(詳しくは報知要否判断部22)に接続されており、車両の接近を報知する必要の有無についての報知要否判断部22による判断結果が入力される。
【0039】
接近音出力装置30は、車両の接近を報知する必要があるとの判断結果が入力された場合には車両接近音を出力する一方、車両の接近を報知する必要がないとの判断結果が入力された場合には車両接近音を出力しない。
【0040】
以上のように構成された車両接近報知システム1は、図3に示す車両接近報知処理S1を実行する。
【0041】
車両接近報知処理S1が実行開始されると、制御装置20(詳しくは画像解析部21)は、撮像装置10から画像情報を取得しその解析を行ない、画像情報の解析を終えると、ステップS11の判断処理として、歩行者を検出したか否かを判断する。
【0042】
ステップS11の判断処理において歩行者を検出したと判断しなかった場合(ステップS11の判断処理で「No」)、車両の接近を報知する必要はない。そのため、制御装置20は、続くステップS12の処理として、「歩行者なし(報知不要)」との判断結果を接近音出力装置30に出力する。「歩行者なし(報知不要)」との判断結果が入力されると、接近音出力装置30は接近音を出力しない。
【0043】
上記ステップS11の判断処理において歩行者を検出したと判断した場合(ステップS11の判断処理で「No」)、制御装置20は、続くステップS13の判断処理として、歩行者が遠ざかるか否かを判断する。ここで、歩行者が遠ざかったと判断した場合(ステップS13の判断処理で「Yes」)、制御装置20は、続くステップS14の処理として、「歩行者あり(報知不要)」との判断結果を接近音出力装置30に出力する。「歩行者あり(報知不要)」との判断結果が入力されると、接近音出力装置30は接近音を出力しない。
【0044】
上記ステップS13の判断処理において歩行者が遠ざかったと判断しなかった場合(ステップS13の判断処理で「No」)、歩行者が走行道路Lに近づくか停止していることを意味する。この場合、制御装置20は、続くステップS15の判断処理として、所定人数以上の歩行者であるか否かを判断する。ここで、所定人数以上の歩行者であると判断した場合(ステップS15の判断処理で「Yes」)、制御装置20は、続くステップS16の処理として、「歩行者あり(報知要)」との判断結果を接近音出力装置30に出力する。「歩行者あり(報知要)」との判断結果が入力されると、接近音出力装置30は接近音を出力する。
【0045】
上記ステップS15の判断処理において所定人数以上の歩行者であると判断しなかった場合(ステップS15の判断処理で「No」)、制御装置20は、続くステップS17の判断処理として、杖を所持する歩行者であるか否かを判断する。ここで、杖を所持する歩行者であると判断した場合(ステップS17の判断処理で「Yes」)、制御装置20は、先のステップS16の処理として、「歩行者あり(報知要)」との判断結果を接近音出力装置30に出力する。「歩行者あり(報知要)」との判断結果が入力されると、接近音出力装置30は接近音を出力する。
【0046】
上記ステップS17の判断処理において杖を所持する歩行者であると判断しなかった場合(ステップS17の判断処理で「No」)、制御装置20は、続くステップS18の判断処理として、犬を連れた歩行者であるか否かを判断する。ここで、犬を連れた歩行者であると判断した場合(ステップS18の判断処理で「Yes」)、制御装置20は、先のステップS16の処理として、「歩行者あり(報知要)」との判断結果を接近音出力装置30に出力する。「歩行者あり(報知要)」との判断結果が入力されると、接近音出力装置30は接近音を出力する。
【0047】
上記ステップS18の判断処理において犬を連れた歩行者であると判断しなかった場合(ステップS18の判断処理で「No」)、制御装置20は、続くステップS19の判断処理として、顔を検出できたか否かを判断する。ここで、顔を検出できたと判断した場合(ステップS19の判断処理で「Yes」)、制御装置20は、先のステップS14の処理として、「歩行者あり(報知不要)」との判断結果を接近音出力装置30に出力する。「歩行者あり(報知不要)」との判断結果が入力されると、接近音出力装置30は接近音を出力しない。
【0048】
上記ステップS19の判断処理において顔を検出できなかったと判断した場合(ステップS19の判断処理で「No」)、制御装置20は、先のステップS16の処理として、「歩行者あり(報知要)」との判断結果を接近音出力装置30に出力する。「歩行者あり(報知要)」との判断結果が入力されると、接近音出力装置30は接近音を出力する。
【0049】
以上説明した本実施の形態では、制御装置20は、撮像装置10から入力された画像情報に基づいて歩行者の顔を検出し、歩行者の顔を検出できなかったことに基づいて車両の接近を報知する必要があると判断する。また、制御装置20は、当該制御装置20に接続された接近音出力装置30に対して車両の接近を報知する必要の有無についての判断結果を出力し、接近音出力装置30は車両の接近を報知する必要があるとの判断結果が入力された場合には車両接近音を出力することとした。
【0050】
歩行者の顔を検出できなかった場合とは、歩行者が車両を見ていないこと、ひいては車両の接近に気付いていないことを意味し、制御装置20は、このような場合に車両の接近を報知する必要があると判断する。そして、接近音出力装置30は、車両の接近音を出力する。したがって、歩行者が移動していなければ車両の接近を報知することのできない従来技術と比較して、車両の接近をより適切に報知することができるようになる。
【0051】
なお、本発明に係る車両接近報知システム1は、上記実施の形態にて例示した構成に限定されるものではなく、本発明の趣旨を逸脱しない範囲において、種々に変形して実施することが可能である。すなわち、上記実施の形態を適宜変更した例えば次の形態として実施することもできる。
【0052】
上記実施の形態では、車両の接近を報知する接近報知部としてスピーカを含む接近音出力装置30を採用しており、車両の接近を音により報知していたが、車両の接近を光により報知する接近光報知部を採用してもよい。具体的には、車両の接近を光により報知する接近光報知部として、車両Cに搭載された専用のライトや車両Cの前照灯を採用するとよい。車両の接近を報知する必要があるとの判断結果が制御装置20から入力されると、専用のライトの光軸を歩行者に向けて光を照射させたり、前照灯の光軸を歩行者に向けて光を照射させたりして、車両の接近を報知するとよい。
【0053】
また、車両の接近を光により報知することにも限らない。車両の接近を風により報知したり、においを付加した風により報知したりしてもよい。具体的には、車両の接近を風により報知する接近風報知部として、車両Cに搭載された専用の送風機や空気砲等を採用するとよい。車両の接近を報知する必要があるとの判断結果が制御装置20から入力されると、送風機の送風方向を歩行者に向けて送風させたり、空気砲の送風方向を歩行者に向けて送風させたりして、車両の接近を報知するとよい。
【0054】
なお、空気砲とは、内部の空気を外部へ放出するための放出孔を一面に有する筐体と、放出孔を有する面の方向を制御する制御機構と、放出孔を有する面以外の面を加圧する加圧機構とを備えており、制御機構によって放出孔を有する面の方向を制御し、加圧機構によって放出孔を有する面以外の面を一瞬加圧することで筐体内部の圧力を一瞬高め、筐体内部の空気を放出孔から放出させるものである。筐体の放出光から放出された空気(風)により車両の接近を報知する。また、車両Cには専用の送風機とともに芳香剤を搭載したり、空気砲の筐体内に芳香剤を載置したりすることで、においが付加された風により車両の接近を報知してもよい。
【0055】
上記実施の形態では、歩行者状態検出部として、車両Cの前進方向側に左右に1つずつ配置された計2台の撮像装置10と画像解析部21とを採用したが、これに限らない。車両Cの前進方向側左右に2つずつ配置された計4台の撮像装置10と画像解析部21とを採用してもよい。車両Cの前進方向左右に2つずつ配置された撮像装置10によって撮像された画像情報に基づいて、公知のステレオ法により、歩行者と走行道路Lの白線との離間距離D、走行道路の白線から車両Cの側面までの離間距離d等々を検出してもよい。
【0056】
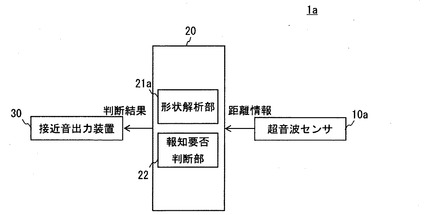
上記実施の形態では、歩行者状態検出部として撮像装置10及び画像解析部21を採用していたが、これら撮像装置10及び画像解析部21に限らない。図1に対応する図として図4に示すように、車両接近報知システム1aは、歩行者状態検出部として超音波センサ10a及び形状解析部21aを備えることとしてもよい。以下、詳しく説明する。
【0057】
超音波センサ10aは、公知の超音波センサであり、例えば車両Cの前進方向側に左右に1つずつ配置され、制御装置20に接続されている。超音波センサ10aは、車両Cが走行する道路である走行道路Lの路面に平行及び垂直に走査可能であり、超音波を出力してからその出力した超音波の物標による反射波が入力されるまでの経過時間に基づいて走査位置における物標までの距離を算出する。なお、物標とは、車両Cの周辺の当該超音波センサ10aの検出エリア内に位置する歩行者、犬、及び障害物等であり、検出エリアとは、当該超音波センサ10aから出力した超音波が物標に反射されてその反射波を超音波センサ10aが受信可能な範囲を意味する。超音波センサ10aは、物標までの距離を算出すると、走査部位及びこの走査部位に対応する距離情報を制御装置20に出力する。
【0058】
形状解析部21aは、超音波センサ10aから入力された走査部位及びこの走査部位に対応する距離情報に基づいて、物標の外形や凹凸等の物標の形状を解析する。そして、形状解析部21aは、この解析された物標の形状と、上記内蔵メモリ等に記憶されている物標の形状パターンとを比較し、物標が歩行者であるか否か、歩行者である場合には所定人数以上の歩行者であるか否か、歩行者である場合には杖を所持する歩行者であるか否か、歩行者である場合には犬を連れた歩行者であるか否か、歩行者である場合には顔を検出できなかったか否か等々をパターンマッチングにより検出する。
【0059】
上記実施の形態では、報知要否判断部22は、画像解析部21によって検出された物標が歩行者である(ステップS11の判断処理)が、その歩行者と判断された物標から走行道路の白線までの離間距離Dが大きくなる場合には、歩行者の顔を検出できなかったか否かに関わらず、車両の接近を報知する必要がないと判断していた(ステップS13の判断処理)。このステップS13の判断処理については省略してもよい。
【0060】
上記実施の形態では、報知要否判断部22は、画像解析部21によって検出された物標が歩行者である(ステップS11の判断処理)が、杖を所持する歩行者が検出された場合場合には、歩行者の顔を検出できなかったか否かに関わらず、車両の接近を報知する必要があると判断していた(ステップS18の判断処理)。このステップS18の判断処理を省略してもよい。
【0061】
上記実施の形態では、報知要否判断部22は、画像解析部21によって検出された物標が歩行者である(ステップS11の判断処理)が、犬を連れた歩行者が検出された場合には、歩行者の顔を検出できなかったか否かに関わらず、車両の接近を報知する必要があると判断していた(ステップS17の判断処理)。このステップS17の判断処理を省略してもよい。
【0062】
上記実施の形態では、報知要否判断部22は、画像解析部21によって検出された物標が歩行者である(ステップS11の判断処理)が、所定人数(例えば「7人」)以上の歩行者である場合には、歩行者の顔を検出できなかったか否かに関わらず、車両の接近を報知する必要があると判断した(ステップS11の判断処理)。このステップS11の判断処理を省略してもよい。
【0063】
上記実施の形態では、接近音出力装置30は、車両の接近を報知する必要があるとの判断結果が入力された場合には車両接近音を出力する一方、車両の接近を報知する必要がないとの判断結果が入力された場合には車両接近音を出力しないが、これに限らない。接近音出力装置30は、車両の接近を報知する必要があるとの判断結果が入力された場合には予め定められた所定の音量よりも大きい音量にて車両接近音を出力する一方、車両の接近を報知する必要がないとの判断結果が入力された場合には予め定められた所定の音量よりも小さい音量にて車両接近音を出力してもよい。
【0064】
接近音出力装置30は、車両の接近を報知する必要があるとの判断結果が入力された場合でも、特に「離間距離Dが変わらない」、「離間距離Dが小さくなる」、あるいは「離間距離Dが零である」ことから、車両の接近を報知する必要があるとの判断結果が入力された場合、予め定められた所定の音量よりも大きい音量にて車両接近音を出力するとよい。これに加え、車両Cは車速を減速してもよい。
【0065】
接近音出力装置30は、車両の接近を報知する必要があるとの判断結果が入力された場合でも、特に「所定人数以上の歩行者であると判断した」ことから、車両の接近を報知する必要があるとの判断結果が入力された場合、車両接近音を鳴らし続けてもよい。
【符号の説明】
【0066】
1、1a…車両接近報知システム、10…撮像装置(歩行者状態検出部)、10a…超音波センサ(歩行者状態検出部)、20…制御装置、21…画像解析部(歩行者状態検出部)、21a…形状解析部(歩行者状態検出部)、22…報知要否判断部、30…接近音出力装置(接近報知部、接近音報知部)
【技術分野】
【0001】
本発明は、車両の接近を報知する車両接近報知システムに関する。
【背景技術】
【0002】
モータ及びエンジンを動力源とするハイブリッド自動車、モータを動力源とする電気自動車、エンジン室を防音構造としてエンジン音の車両外への漏洩を低減した自動車等、走行時の騒音が低い低騒音車両が知られている。この低騒音車両の特徴である低騒音に起因して、歩行者との接触事故の増加が懸念されている。
【0003】
その対策として、車両の接近を音により報知することが提案されている。ただし、音により報知し続けると騒音になってしまうことから、車両の速度、歩行者の有無、車両が交差点付近に位置する等により、音の大きさを変更したり、音による報知を停止したりすることが提案されている。
【0004】
しかしながら、車両の接近に気付いている歩行者に対して報知することはその歩行者に不快であり、不要である。
【0005】
そこで、従来、特許文献1には、物標を検知するレーダと、物標の画像を取得する赤外線カメラとを備え、これらレーダ及び赤外線カメラによって取得されるデータに基づき歩行者を認識し、その認識された歩行者の移動方向に自車両の進行方向に対して直角な成分が含まれる場合に限定して接近音を出力する技術が記載されている。これにより、歩行者が車両の接近に気付いている場合には接近音を出力せず、接触の可能性があり危険と判断される場合に限定して接近音を出力することができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−197720号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記従来の技術では、自車両の進行方向に対して直角な成分が歩行者の移動方向に含まれている場合を、歩行者が車両の接近に気付いていない場合とみなしている。
【0008】
しかしながら、自車両が走行する車線脇に立って横断しようとしている歩行者が、自車両が走行する車線(走行道路)と反対の車線に顔を向け(したがって自車両に顔を向けていない)その車線を通行する車両に気を取られ、自車両の接近に気付いていない場合のように、歩行者が移動していなくても車両の接近に気付いていない場合がある。歩行者が移動していなくても車両の接近に気付いていない場合、自車両が走行する車線に歩行者が飛び出してくることが考えられるため、車両の接近を報知すべきであるものの、上記従来の技術では、歩行者が移動していないことから、歩行者に車両の接近を報知することができない。このように、上記従来の技術には、依然として改善の余地が残されている。
【0009】
本発明は、上記実情に鑑みてなされたものであって、車両の接近をより適切に報知することのできる車両接近報知システムを提供することにある。
【課題を解決するための手段】
【0010】
こうした目的を達成するため、請求項1に記載の発明では、車両の周辺に位置する歩行者の有無及びその状態を検出する歩行者状態検出部と、歩行者状態検出部によって検出された歩行者の有無及びその状態に基づいて、車両の接近を報知する必要の有無を判断する報知要否判断部と、報知要否判断部によって車両の接近を報知する必要があると判断された場合には車両の接近を報知する接近報知部とを備える車両接近報知システムにおいて、歩行者状態検出部は、歩行者の顔を検出できるか否かにより、歩行者の状態として顔の向きを検出し、報知要否判断部は、歩行者状態検出部によって歩行者を検出できたがその歩行者の顔を検出できなかったことに基づいて、車両の接近を報知する必要があると判断することとした。
【0011】
車両接近報知システムとしての上記構成では、報知要否判断部は、歩行者状態検出部によって歩行者の顔を検出できなかったことに基づいて車両の接近を報知する必要があると判断する。ここで、歩行者の顔を検出できなかった場合とは、歩行者が車両を見ていないことから、その歩行者は車両の接近に気付いていない可能性が高いため、報知要否判断部は、このような場合に車両の接近を報知する必要があると判断する。そして、接近報知部は、報知要否判断部によって車両の接近を報知する必要があると判断された場合に車両の接近を報知する。したがって、歩行者が移動していなければ車両の接近を報知することのできない上記従来技術と比較して、車両の接近をより適切に報知することができるようになる。
【0012】
歩行者状態検出部によって所定範囲内に所定人数以上の歩行者が検出された場合、その全員の顔を検出することは難しく、その全員の顔を検出できたとしても、歩行者間の会話等に夢中で車両の接近に気付いていない歩行者が含まれている可能性もある。
【0013】
そこで、請求項2に記載の発明のように、歩行者状態検出部は、歩行者の有無及びその顔に加え、歩行者の数を検出し、報知要否判断部は、歩行者状態検出部によって所定範囲内に所定人数以上の歩行者が検出された場合には、歩行者の顔を検出できたか否かに関わらず、車両の接近を報知する必要があると判断するとよい。これにより、歩行者状態検出部によって所定範囲内に所定人数以上の歩行者が検出された場合には、歩行者の顔を検出できたか否かに関わらず、接近報知部によって車両の接近を報知することができるようになる。
【0014】
なお、上記所定人数として、「2人」を採用してもよい。あるいは、上記所定人数として、車両が当該車両と歩行者との離間距離を走行する時間内に、歩行者の数を検出することのできる最大の人数(例えば「7人」等)を採用してもよい。またあるいは、歩行者の顔を検出するのに必要な演算量は、歩行者の数を検出するのに必要な演算量よりも多いことから、上記所定人数として、車両が当該車両と歩行者との離間距離を走行する時間内に、歩行者の数を検出することはできるものの、その検出した歩行者全員の顔を検出することまではできない人数(例えば「3人」や「5人」等)を採用してもよい。要は、上記所定人数は任意である。また、上記所定範囲内としては、歩行者間で会話ができる範囲(例えば「数[m]」)を採用するとよい。
【0015】
歩行者状態検出部によって検出された歩行者が盲人である場合、その盲人の顔を検出できたとしても、その盲人が車両の接近に気付いていない可能性もある。また、盲人は、杖を用いて歩行したり、盲導犬と一緒に歩行したりする。
【0016】
そこで、請求項3に記載の発明のように、歩行者状態検出部は、歩行者の有無及びその顔に加え、杖を検出し、報知要否判断部は、歩行者状態検出部によって杖を所持する歩行者が検出された場合には、歩行者の顔を検出できたか否かに関わらず、車両の接近を報知する必要があると判断するとよい。あるいは、請求項4に記載の発明のように、歩行者状態検出部は、歩行者の有無及びその顔に加え、犬を検出し、報知要否判断部は、歩行者状態検出部によって犬を連れた歩行者が検出された場合には、歩行者の顔を検出できたか否かに関わらず、車両の接近を報知する必要があると判断するとよい。
【0017】
上記請求項3に記載の構成によれば、歩行者状態検出部によって杖を所持する歩行者が検出された場合には接近報知部によって車両の接近が報知されるため、検出された歩行者が盲人であっても、車両の接近を確実に報知することができるようになる。また、上記請求項4に記載の構成によれば、歩行者状態検出部によって犬を連れた歩行者が検出された場合には接近報知部によって車両の接近が報知されるため、検出された歩行者が盲人であっても、その盲人に車両の接近を報知することができるようになる。
【0018】
上記請求項1〜4のいずれか一項に記載の構成において、請求項5に記載の発明では、歩行者状態検出部は、歩行者と車両の走行道路との離間距離を逐次検出し、報知要否判断部は、歩行者状態検出部によって離間距離が大きくなる場合には、歩行者の顔を検出できたか否かに関わらず、車両の接近を報知する必要がないと判断することとした。
【0019】
上記離間距離が大きくなる場合とは、歩行者が走行道路から遠ざかることを意味することから、歩行者が車両の接近に気付いているか気付いていないかに関わらず、車両と接触する可能性は低くなる。したがって、上記請求項5に記載の発明によれば、車両の接近の不要な報知を低減することができるようになる。
【0020】
上記請求項1〜5のいずれか一項に記載の構成において、請求項6に記載の発明では、歩行者状態検出部は、車両の周辺を撮像する撮像装置と、撮像装置によって撮像された画像を解析する画像解析部とを含むこととした。画像解析部は、撮像装置によって撮像された画像を、例えばパターンマッチング等の公知の技術にて解析することにより、歩行者の検出、歩行者の顔の検出、歩行者数の検出、杖の検出、犬の検出等々を行なうことができ、例えば歩行者と車両の走行道路との間の画素数を解析する等により、歩行者と車両の走行道路との離間距離が大きくなるか否かを判断することができる。
【0021】
また、上記請求項1〜6のいずれか一項に記載の構成において、請求項7に記載の発明では、歩行者状態検出部は、車両の周辺に位置する物標との距離を超音波を用いて検出する超音波センサと、超音波センサによって得られる物標の形状を解析する形状解析部とを含むこととした。形状解析部は、物標の形状を解析することにより、歩行者の検出、歩行者の顔の検出、歩行者数の検出、杖の検出、犬の検出、歩行者と車両の走行道路との離間距離等々を行なうことができる。
【0022】
報知態様は任意であり、請求項8に記載の発明のように、接近報知部は音により報知する接近音報知部を含んでいてもよい。具体的には、接近音報知部は、例えば、擬似的な車両の走行音である擬似走行音、警報、楽曲等の音により報知する。なお、この請求項8に記載の発明は、上記請求項4に記載の構成との併用が可能であり、この場合、例えば「20〜22[kHz]」の音を発生する犬笛等を用いて、犬に対し車両の接近を報知するとよい。
【0023】
あるいは、請求項9に記載の発明のように、接近報知部は、車両の接近を光により接近光報知部を含んでいてもよい。具体的には、接近光報知部は、専用のライトの光軸を変化させる、あるいは、車両の前照灯の光軸を変化させる等して、光により車両の接近を報知してもよい。
【0024】
またあるいは、請求項10に記載の発明のように、接近報知部は、車両の接近を風により報知する接近風報知部を含んでいてもよい。具体的には、接近風報知部は、専用の送風機や空気砲等による風により車両の接近を報知してもよい。さらに、接近風報知部は、においを付加した風により車両の接近を報知してもよい。
【図面の簡単な説明】
【0025】
【図1】本発明に係る車両接近報知システムの一実施の形態について、その全体構成を示すブロック図である。
【図2】本実施の形態を構成する撮像装置の検知エリアを示す模式図である。
【図3】本実施の形態によって実行される車両接近報知処理について、その処理手順を示すフローチャートである。
【図4】本発明に係る車両接近報知システムの他の実施の形態について、その全体構成を示すブロック図である。
【発明を実施するための形態】
【0026】
以下、本発明に係る車両接近報知システムの一実施の形態について、図1〜図3を参照して説明する。なお、この車両接近報知システム1は、図1には図示しない車両Cに搭載されており、この車両Cには、図2に示すように、当該車両Cが走行する走行道路Lの白線から当該車両Cの車体側面までの離間距離が一定距離となるように走行する機能(いわゆるレーンキープアシスト)が搭載されている。
【0027】
図1に示されるように、車両接近報知システム1は、撮像装置10と、制御装置20と、接近音出力装置30とを備えて構成されている。制御装置20は、公知のCPU及び内蔵メモリを有して構成されるコンピュータであり、そのCPUが内蔵メモリに記憶されているプログラムを実行することによって各種機能を実現している。以下の説明では、便宜上、制御装置20は画像解析部21と報知要否判断部22とを有するものとして説明する。なお、制御装置20の内蔵メモリには、プログラムの他に、歩行者の形状パターン、歩行者の顔の形状パターン、犬の形状パターン、杖の形状パターン等、物標の形状パターンが記憶されている。撮像装置10及び画像解析部21が特許請求の範囲に記載の歩行者状態検出部に相当し、接近音出力装置30が特許請求の範囲に記載の接近音報知部に相当する。
【0028】
撮像装置10は、公知の撮像装置であり、車両Cの前進方向側に左右に1つずつ配置され、制御装置20に接続されている。詳しくは、撮像装置10は、車両の周辺の歩行者検出用エリアを撮像し、その撮像した画像の情報である画像情報を制御装置20に出力する。図2には、車両Cの前進方向側左方に配置された撮像装置10の歩行者検出用エリアAが破線にて示されている。この歩行者検出用エリアAは、車両Cの左右方向に対しては、走行道路Lに隣接する歩道を含む範囲(例えば車両Cから「10[m]」等)に予め設定されており、車両Cの前進方向に対しては、歩行者が走行道路Lに飛び出したことに気付いた運転者が車両Cにブレーキをかけてその歩行者と車両Cとが接触しない距離を含む範囲(例えば車両Cから「50[m]等)に予め設定されている。また、車両Cの前進方向側左方に配置された撮像装置10の白線検出用エリアAl及び車両Cの前進方向側右方に配置された撮像装置10の白線検出用エリアArが図示されている。この図2に示されるように、歩行者検出用エリアAは白線検出用エリアAlを含むように設定されている。なお、本実施の形態では、撮像装置10がレーンキープアシスト用の撮像装置を兼ねていることから、白線検出用エリアAlが歩行者検出用エリアAに含まれていたが、これに限らず、レーンキープアシスト用の撮像装置とは別に、歩行者検出用の撮像装置を車両に搭載してもよい。
【0029】
画像解析部21は、撮像装置10から入力された画像情報に基づいて、車両の周辺に位置する歩行者、歩行者の顔、杖、犬、歩行者と走行道路Lの白線との離間距離D、走行道路の白線から車両Cの側面までの離間距離d等々を検出する。
【0030】
詳しくは、画像解析部21は、撮像装置10から入力された画像情報のうち特に白線検出用エリアAl及びArの画像情報を解析して走行道路の白線を検出し、その検出した白線から車両Cの側面までの離間距離dを検出する。白線の検出方法や離間距離dの検出方法については公知であるため、ここでの詳しい説明を省略する。
【0031】
また、画像解析部21は、撮像装置10から入力された画像情報を解析して得られた物標の形状と上記内蔵メモリ等に記憶されている物標の形状パターンとを比較し、物標が歩行者であるか否か、歩行者である場合には所定人数以上の歩行者であるか否か、歩行者である場合には杖を所持する歩行者であるか否か、歩行者である場合には犬を連れた歩行者であるか否か、歩行者である場合には顔を検出できなかったか否か等々を公知のパターンマッチングにより検出する。また、画像解析部21は、歩行者と判断された物標から走行道路の白線までの離間距離Dを逐次検出する。
【0032】
報知要否判断部22は、画像解析部21によって検出された歩行者及びその状態に基づいて、車両の接近を報知する必要の有無を判断する。
【0033】
具体的には、報知要否判断部22は、画像解析部21によって検出された物標が歩行者であり、画像解析部21によってその歩行者の顔を検出できた場合には、車両の接近を報知する必要はないと判断する。歩行者の顔を検出できた場合とは、歩行者が車両を見ていることから、その歩行者は車両の接近に気付いている可能性が高いため、そのような歩行者に車両の接近を報知することは不快となるためである。なお、ここでの顔とは、両目を検出する等、顔の全部が好ましいが、片目を検出する等、顔の一部(すなわち横顔)でもよい。一方、報知要否判断部22は、画像解析部21によって検出された物標が歩行者であり、画像解析部21によってその歩行者の顔を検出できなかった場合には、車両の接近を報知する必要があると判断する。歩行者の顔を検出できなかった場合とは、歩行者が車両を見ていないことから、その歩行者は車両の接近に気付いていない可能性が高いためである。
【0034】
ただし、報知要否判断部22は、画像解析部21によって検出された物標が歩行者であるが、所定範囲(例えば「数[m]」)内に所定人数(例えば「7人」)以上の歩行者である場合には、歩行者の顔を検出できなかったか否かに関わらず、車両の接近を報知する必要があると判断する。画像解析部21によって所定範囲内に所定人数以上の歩行者が検出された場合、その全員の顔を検出することは難しく、その全員の顔を検出できたとしても、歩行者間の会話等に夢中で車両の接近に気付いていない歩行者が含まれている可能性もあるためである。なお、本実施の形態では、所定人数として例えば「7人」を採用したが「7人」に限らず「2人」以上であればよい。
【0035】
さらに、報知要否判断部22は、画像解析部21によって検出された物標が歩行者であるが、杖を所持する歩行者が検出された場合や犬を連れた歩行者が検出された場合には、歩行者の顔を検出できなかったか否かに関わらず、車両の接近を報知する必要があると判断する。杖を所持する歩行者が検出された場合や犬を連れた歩行者が検出された場合とは、歩行者が盲人である可能性があり、歩行者が盲人である場合、その盲人の顔を検出できたとしても、その盲人が車両の接近に気付いていない可能性もあるためである。
【0036】
また、報知要否判断部22は、画像解析部21によって検出された物標が歩行者であるが、その歩行者と判断された物標から走行道路の白線までの離間距離Dが大きくなる場合には、歩行者の顔を検出できなかったか否かに関わらず、車両の接近を報知する必要がないと判断する。上記離間距離Dが大きくなる場合とは、歩行者が走行道路Lから遠ざかることを意味することから、歩行者が車両の接近に気付いているか気付いていないかに関わらず、車両と接触する可能性は低くなるためである。なお、報知要否判断部22は、「離間距離Dが大きくなる場合」だけでなく「小さくなっていた離間距離Dが変わらなくなった場合」にも、車両の接近を報知する必要がないと判断してもよい。
【0037】
そして、報知要否判断部22は、制御装置20に接続された接近音出力装置30に対し、車両の接近を報知する必要の有無についての判断結果を出力する。
【0038】
接近音出力装置30は、車両の接近を示す接近音を出力するスピーカを含んで構成され、制御装置20(詳しくは報知要否判断部22)に接続されており、車両の接近を報知する必要の有無についての報知要否判断部22による判断結果が入力される。
【0039】
接近音出力装置30は、車両の接近を報知する必要があるとの判断結果が入力された場合には車両接近音を出力する一方、車両の接近を報知する必要がないとの判断結果が入力された場合には車両接近音を出力しない。
【0040】
以上のように構成された車両接近報知システム1は、図3に示す車両接近報知処理S1を実行する。
【0041】
車両接近報知処理S1が実行開始されると、制御装置20(詳しくは画像解析部21)は、撮像装置10から画像情報を取得しその解析を行ない、画像情報の解析を終えると、ステップS11の判断処理として、歩行者を検出したか否かを判断する。
【0042】
ステップS11の判断処理において歩行者を検出したと判断しなかった場合(ステップS11の判断処理で「No」)、車両の接近を報知する必要はない。そのため、制御装置20は、続くステップS12の処理として、「歩行者なし(報知不要)」との判断結果を接近音出力装置30に出力する。「歩行者なし(報知不要)」との判断結果が入力されると、接近音出力装置30は接近音を出力しない。
【0043】
上記ステップS11の判断処理において歩行者を検出したと判断した場合(ステップS11の判断処理で「No」)、制御装置20は、続くステップS13の判断処理として、歩行者が遠ざかるか否かを判断する。ここで、歩行者が遠ざかったと判断した場合(ステップS13の判断処理で「Yes」)、制御装置20は、続くステップS14の処理として、「歩行者あり(報知不要)」との判断結果を接近音出力装置30に出力する。「歩行者あり(報知不要)」との判断結果が入力されると、接近音出力装置30は接近音を出力しない。
【0044】
上記ステップS13の判断処理において歩行者が遠ざかったと判断しなかった場合(ステップS13の判断処理で「No」)、歩行者が走行道路Lに近づくか停止していることを意味する。この場合、制御装置20は、続くステップS15の判断処理として、所定人数以上の歩行者であるか否かを判断する。ここで、所定人数以上の歩行者であると判断した場合(ステップS15の判断処理で「Yes」)、制御装置20は、続くステップS16の処理として、「歩行者あり(報知要)」との判断結果を接近音出力装置30に出力する。「歩行者あり(報知要)」との判断結果が入力されると、接近音出力装置30は接近音を出力する。
【0045】
上記ステップS15の判断処理において所定人数以上の歩行者であると判断しなかった場合(ステップS15の判断処理で「No」)、制御装置20は、続くステップS17の判断処理として、杖を所持する歩行者であるか否かを判断する。ここで、杖を所持する歩行者であると判断した場合(ステップS17の判断処理で「Yes」)、制御装置20は、先のステップS16の処理として、「歩行者あり(報知要)」との判断結果を接近音出力装置30に出力する。「歩行者あり(報知要)」との判断結果が入力されると、接近音出力装置30は接近音を出力する。
【0046】
上記ステップS17の判断処理において杖を所持する歩行者であると判断しなかった場合(ステップS17の判断処理で「No」)、制御装置20は、続くステップS18の判断処理として、犬を連れた歩行者であるか否かを判断する。ここで、犬を連れた歩行者であると判断した場合(ステップS18の判断処理で「Yes」)、制御装置20は、先のステップS16の処理として、「歩行者あり(報知要)」との判断結果を接近音出力装置30に出力する。「歩行者あり(報知要)」との判断結果が入力されると、接近音出力装置30は接近音を出力する。
【0047】
上記ステップS18の判断処理において犬を連れた歩行者であると判断しなかった場合(ステップS18の判断処理で「No」)、制御装置20は、続くステップS19の判断処理として、顔を検出できたか否かを判断する。ここで、顔を検出できたと判断した場合(ステップS19の判断処理で「Yes」)、制御装置20は、先のステップS14の処理として、「歩行者あり(報知不要)」との判断結果を接近音出力装置30に出力する。「歩行者あり(報知不要)」との判断結果が入力されると、接近音出力装置30は接近音を出力しない。
【0048】
上記ステップS19の判断処理において顔を検出できなかったと判断した場合(ステップS19の判断処理で「No」)、制御装置20は、先のステップS16の処理として、「歩行者あり(報知要)」との判断結果を接近音出力装置30に出力する。「歩行者あり(報知要)」との判断結果が入力されると、接近音出力装置30は接近音を出力する。
【0049】
以上説明した本実施の形態では、制御装置20は、撮像装置10から入力された画像情報に基づいて歩行者の顔を検出し、歩行者の顔を検出できなかったことに基づいて車両の接近を報知する必要があると判断する。また、制御装置20は、当該制御装置20に接続された接近音出力装置30に対して車両の接近を報知する必要の有無についての判断結果を出力し、接近音出力装置30は車両の接近を報知する必要があるとの判断結果が入力された場合には車両接近音を出力することとした。
【0050】
歩行者の顔を検出できなかった場合とは、歩行者が車両を見ていないこと、ひいては車両の接近に気付いていないことを意味し、制御装置20は、このような場合に車両の接近を報知する必要があると判断する。そして、接近音出力装置30は、車両の接近音を出力する。したがって、歩行者が移動していなければ車両の接近を報知することのできない従来技術と比較して、車両の接近をより適切に報知することができるようになる。
【0051】
なお、本発明に係る車両接近報知システム1は、上記実施の形態にて例示した構成に限定されるものではなく、本発明の趣旨を逸脱しない範囲において、種々に変形して実施することが可能である。すなわち、上記実施の形態を適宜変更した例えば次の形態として実施することもできる。
【0052】
上記実施の形態では、車両の接近を報知する接近報知部としてスピーカを含む接近音出力装置30を採用しており、車両の接近を音により報知していたが、車両の接近を光により報知する接近光報知部を採用してもよい。具体的には、車両の接近を光により報知する接近光報知部として、車両Cに搭載された専用のライトや車両Cの前照灯を採用するとよい。車両の接近を報知する必要があるとの判断結果が制御装置20から入力されると、専用のライトの光軸を歩行者に向けて光を照射させたり、前照灯の光軸を歩行者に向けて光を照射させたりして、車両の接近を報知するとよい。
【0053】
また、車両の接近を光により報知することにも限らない。車両の接近を風により報知したり、においを付加した風により報知したりしてもよい。具体的には、車両の接近を風により報知する接近風報知部として、車両Cに搭載された専用の送風機や空気砲等を採用するとよい。車両の接近を報知する必要があるとの判断結果が制御装置20から入力されると、送風機の送風方向を歩行者に向けて送風させたり、空気砲の送風方向を歩行者に向けて送風させたりして、車両の接近を報知するとよい。
【0054】
なお、空気砲とは、内部の空気を外部へ放出するための放出孔を一面に有する筐体と、放出孔を有する面の方向を制御する制御機構と、放出孔を有する面以外の面を加圧する加圧機構とを備えており、制御機構によって放出孔を有する面の方向を制御し、加圧機構によって放出孔を有する面以外の面を一瞬加圧することで筐体内部の圧力を一瞬高め、筐体内部の空気を放出孔から放出させるものである。筐体の放出光から放出された空気(風)により車両の接近を報知する。また、車両Cには専用の送風機とともに芳香剤を搭載したり、空気砲の筐体内に芳香剤を載置したりすることで、においが付加された風により車両の接近を報知してもよい。
【0055】
上記実施の形態では、歩行者状態検出部として、車両Cの前進方向側に左右に1つずつ配置された計2台の撮像装置10と画像解析部21とを採用したが、これに限らない。車両Cの前進方向側左右に2つずつ配置された計4台の撮像装置10と画像解析部21とを採用してもよい。車両Cの前進方向左右に2つずつ配置された撮像装置10によって撮像された画像情報に基づいて、公知のステレオ法により、歩行者と走行道路Lの白線との離間距離D、走行道路の白線から車両Cの側面までの離間距離d等々を検出してもよい。
【0056】
上記実施の形態では、歩行者状態検出部として撮像装置10及び画像解析部21を採用していたが、これら撮像装置10及び画像解析部21に限らない。図1に対応する図として図4に示すように、車両接近報知システム1aは、歩行者状態検出部として超音波センサ10a及び形状解析部21aを備えることとしてもよい。以下、詳しく説明する。
【0057】
超音波センサ10aは、公知の超音波センサであり、例えば車両Cの前進方向側に左右に1つずつ配置され、制御装置20に接続されている。超音波センサ10aは、車両Cが走行する道路である走行道路Lの路面に平行及び垂直に走査可能であり、超音波を出力してからその出力した超音波の物標による反射波が入力されるまでの経過時間に基づいて走査位置における物標までの距離を算出する。なお、物標とは、車両Cの周辺の当該超音波センサ10aの検出エリア内に位置する歩行者、犬、及び障害物等であり、検出エリアとは、当該超音波センサ10aから出力した超音波が物標に反射されてその反射波を超音波センサ10aが受信可能な範囲を意味する。超音波センサ10aは、物標までの距離を算出すると、走査部位及びこの走査部位に対応する距離情報を制御装置20に出力する。
【0058】
形状解析部21aは、超音波センサ10aから入力された走査部位及びこの走査部位に対応する距離情報に基づいて、物標の外形や凹凸等の物標の形状を解析する。そして、形状解析部21aは、この解析された物標の形状と、上記内蔵メモリ等に記憶されている物標の形状パターンとを比較し、物標が歩行者であるか否か、歩行者である場合には所定人数以上の歩行者であるか否か、歩行者である場合には杖を所持する歩行者であるか否か、歩行者である場合には犬を連れた歩行者であるか否か、歩行者である場合には顔を検出できなかったか否か等々をパターンマッチングにより検出する。
【0059】
上記実施の形態では、報知要否判断部22は、画像解析部21によって検出された物標が歩行者である(ステップS11の判断処理)が、その歩行者と判断された物標から走行道路の白線までの離間距離Dが大きくなる場合には、歩行者の顔を検出できなかったか否かに関わらず、車両の接近を報知する必要がないと判断していた(ステップS13の判断処理)。このステップS13の判断処理については省略してもよい。
【0060】
上記実施の形態では、報知要否判断部22は、画像解析部21によって検出された物標が歩行者である(ステップS11の判断処理)が、杖を所持する歩行者が検出された場合場合には、歩行者の顔を検出できなかったか否かに関わらず、車両の接近を報知する必要があると判断していた(ステップS18の判断処理)。このステップS18の判断処理を省略してもよい。
【0061】
上記実施の形態では、報知要否判断部22は、画像解析部21によって検出された物標が歩行者である(ステップS11の判断処理)が、犬を連れた歩行者が検出された場合には、歩行者の顔を検出できなかったか否かに関わらず、車両の接近を報知する必要があると判断していた(ステップS17の判断処理)。このステップS17の判断処理を省略してもよい。
【0062】
上記実施の形態では、報知要否判断部22は、画像解析部21によって検出された物標が歩行者である(ステップS11の判断処理)が、所定人数(例えば「7人」)以上の歩行者である場合には、歩行者の顔を検出できなかったか否かに関わらず、車両の接近を報知する必要があると判断した(ステップS11の判断処理)。このステップS11の判断処理を省略してもよい。
【0063】
上記実施の形態では、接近音出力装置30は、車両の接近を報知する必要があるとの判断結果が入力された場合には車両接近音を出力する一方、車両の接近を報知する必要がないとの判断結果が入力された場合には車両接近音を出力しないが、これに限らない。接近音出力装置30は、車両の接近を報知する必要があるとの判断結果が入力された場合には予め定められた所定の音量よりも大きい音量にて車両接近音を出力する一方、車両の接近を報知する必要がないとの判断結果が入力された場合には予め定められた所定の音量よりも小さい音量にて車両接近音を出力してもよい。
【0064】
接近音出力装置30は、車両の接近を報知する必要があるとの判断結果が入力された場合でも、特に「離間距離Dが変わらない」、「離間距離Dが小さくなる」、あるいは「離間距離Dが零である」ことから、車両の接近を報知する必要があるとの判断結果が入力された場合、予め定められた所定の音量よりも大きい音量にて車両接近音を出力するとよい。これに加え、車両Cは車速を減速してもよい。
【0065】
接近音出力装置30は、車両の接近を報知する必要があるとの判断結果が入力された場合でも、特に「所定人数以上の歩行者であると判断した」ことから、車両の接近を報知する必要があるとの判断結果が入力された場合、車両接近音を鳴らし続けてもよい。
【符号の説明】
【0066】
1、1a…車両接近報知システム、10…撮像装置(歩行者状態検出部)、10a…超音波センサ(歩行者状態検出部)、20…制御装置、21…画像解析部(歩行者状態検出部)、21a…形状解析部(歩行者状態検出部)、22…報知要否判断部、30…接近音出力装置(接近報知部、接近音報知部)
【特許請求の範囲】
【請求項1】
車両の周辺に位置する歩行者の有無及びその状態を検出する歩行者状態検出部と、
前記歩行者状態検出部によって検出された歩行者の有無及びその状態に基づいて、車両の接近を報知する必要の有無を判断する報知要否判断部と、
前記報知要否判断部によって車両の接近を報知する必要があると判断された場合には車両の接近を報知する接近報知部とを備える車両接近報知システムにおいて、
前記歩行者状態検出部は、歩行者の顔を検出できるか否かにより、歩行者の状態として顔の向きを検出し、
前記報知要否判断部は、前記歩行者状態検出部によって歩行者を検出できたがその歩行者の顔を検出できなかったことに基づいて、車両の接近を報知する必要があると判断することを特徴とする車両接近報知システム。
【請求項2】
請求項1に記載の車両接近報知システムにおいて、
前記歩行者状態検出部は、歩行者の有無及びその顔に加え、歩行者の数を検出し、
前記報知要否判断部は、前記歩行者状態検出部によって所定範囲内に所定人数以上の歩行者が検出された場合には、歩行者の顔を検出できたか否かに関わらず、車両の接近を報知する必要があると判断することを特徴とする車両接近報知システム。
【請求項3】
請求項1または2に記載の車両接近報知システムにおいて、
前記歩行者状態検出部は、歩行者の有無及びその顔に加え、杖を検出し、
前記報知要否判断部は、前記歩行者状態検出部によって杖を所持する歩行者が検出された場合には、歩行者の顔を検出できたか否かに関わらず、車両の接近を報知する必要があると判断することを特徴とする車両接近報知システム。
【請求項4】
請求項1〜3のいずれか一項に記載の車両接近報知システムにおいて、
前記歩行者状態検出部は、歩行者の有無及びその顔に加え、犬を検出し、
前記報知要否判断部は、前記歩行者状態検出部によって犬を連れた歩行者が検出された場合には、歩行者の顔を検出できたか否かに関わらず、車両の接近を報知する必要があると判断することを特徴とする車両接近報知システム。
【請求項5】
請求項1〜4のいずれか一項に記載の車両接近報知システムにおいて、
前記歩行者状態検出部は、歩行者と車両の走行道路との離間距離を逐次検出し、
前記報知要否判断部は、前記歩行者状態検出部によって前記離間距離が大きくなる場合には、歩行者の顔を検出できたか否かに関わらず、車両の接近を報知する必要がないと判断することを特徴とする車両接近報知システム。
【請求項6】
請求項1〜5のいずれか一項に記載の車両接近報知システムにおいて、
前記歩行者状態検出部は、
車両の周辺を撮像する撮像装置と、
前記撮像装置によって撮像された画像を解析する画像解析部とを含むことを特徴とする車両接近報知システム。
【請求項7】
請求項1〜6のいずれか一項に記載の車両接近報知システムにおいて、
前記歩行者状態検出部は、
車両の周辺に位置する物標との距離を超音波を用いて検出する超音波センサと、
前記超音波センサによって得られる物標の形状を解析する形状解析部とを含むことを特徴とする車両接近報知システム。
【請求項8】
請求項1〜7のいずれか一項に記載の車両接近報知システムにおいて、
前記接近報知部は、車両の接近を音により報知する接近音報知部を含むことを特徴とする車両接近報知システム。
【請求項9】
請求項1〜8のいずれか一項に記載の車両接近報知システムにおいて、
前記接近報知部は、車両の接近を光により報知する接近光報知部を含むことを特徴とする車両接近報知システム。
【請求項10】
請求項1〜9のいずれか一項に記載の車両接近報知システムにおいて、
前記接近報知部は、車両の接近を風により報知する接近風報知部を含むことを特徴とする車両接近報知システム。
【請求項1】
車両の周辺に位置する歩行者の有無及びその状態を検出する歩行者状態検出部と、
前記歩行者状態検出部によって検出された歩行者の有無及びその状態に基づいて、車両の接近を報知する必要の有無を判断する報知要否判断部と、
前記報知要否判断部によって車両の接近を報知する必要があると判断された場合には車両の接近を報知する接近報知部とを備える車両接近報知システムにおいて、
前記歩行者状態検出部は、歩行者の顔を検出できるか否かにより、歩行者の状態として顔の向きを検出し、
前記報知要否判断部は、前記歩行者状態検出部によって歩行者を検出できたがその歩行者の顔を検出できなかったことに基づいて、車両の接近を報知する必要があると判断することを特徴とする車両接近報知システム。
【請求項2】
請求項1に記載の車両接近報知システムにおいて、
前記歩行者状態検出部は、歩行者の有無及びその顔に加え、歩行者の数を検出し、
前記報知要否判断部は、前記歩行者状態検出部によって所定範囲内に所定人数以上の歩行者が検出された場合には、歩行者の顔を検出できたか否かに関わらず、車両の接近を報知する必要があると判断することを特徴とする車両接近報知システム。
【請求項3】
請求項1または2に記載の車両接近報知システムにおいて、
前記歩行者状態検出部は、歩行者の有無及びその顔に加え、杖を検出し、
前記報知要否判断部は、前記歩行者状態検出部によって杖を所持する歩行者が検出された場合には、歩行者の顔を検出できたか否かに関わらず、車両の接近を報知する必要があると判断することを特徴とする車両接近報知システム。
【請求項4】
請求項1〜3のいずれか一項に記載の車両接近報知システムにおいて、
前記歩行者状態検出部は、歩行者の有無及びその顔に加え、犬を検出し、
前記報知要否判断部は、前記歩行者状態検出部によって犬を連れた歩行者が検出された場合には、歩行者の顔を検出できたか否かに関わらず、車両の接近を報知する必要があると判断することを特徴とする車両接近報知システム。
【請求項5】
請求項1〜4のいずれか一項に記載の車両接近報知システムにおいて、
前記歩行者状態検出部は、歩行者と車両の走行道路との離間距離を逐次検出し、
前記報知要否判断部は、前記歩行者状態検出部によって前記離間距離が大きくなる場合には、歩行者の顔を検出できたか否かに関わらず、車両の接近を報知する必要がないと判断することを特徴とする車両接近報知システム。
【請求項6】
請求項1〜5のいずれか一項に記載の車両接近報知システムにおいて、
前記歩行者状態検出部は、
車両の周辺を撮像する撮像装置と、
前記撮像装置によって撮像された画像を解析する画像解析部とを含むことを特徴とする車両接近報知システム。
【請求項7】
請求項1〜6のいずれか一項に記載の車両接近報知システムにおいて、
前記歩行者状態検出部は、
車両の周辺に位置する物標との距離を超音波を用いて検出する超音波センサと、
前記超音波センサによって得られる物標の形状を解析する形状解析部とを含むことを特徴とする車両接近報知システム。
【請求項8】
請求項1〜7のいずれか一項に記載の車両接近報知システムにおいて、
前記接近報知部は、車両の接近を音により報知する接近音報知部を含むことを特徴とする車両接近報知システム。
【請求項9】
請求項1〜8のいずれか一項に記載の車両接近報知システムにおいて、
前記接近報知部は、車両の接近を光により報知する接近光報知部を含むことを特徴とする車両接近報知システム。
【請求項10】
請求項1〜9のいずれか一項に記載の車両接近報知システムにおいて、
前記接近報知部は、車両の接近を風により報知する接近風報知部を含むことを特徴とする車両接近報知システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−198295(P2011−198295A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−66899(P2010−66899)
【出願日】平成22年3月23日(2010.3.23)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月23日(2010.3.23)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]