
車両搬送装置
【課題】車両の左右両側に充分な空きスペースがなくても、簡単な構成で車両を確実に搬送し得る車両搬送装置を提供する。
【解決手段】走行駆動装置2により全方向に自走可能で且つ車両1下部に進入可能な台車本体3と、該台車本体3の台車フレーム3aに連結部材5を介して取り付けられるリフターフレーム4aに、前記台車フレーム3aの側面に沿う格納位置と前記車両1の各車輪1aを前後から挟み付けるように支持しつつリフトアップする展開位置との間で回動自在な一対のリフトバー4bを、前記車両1の車輪1aに対応させて枢着することによって形成したリフター4とを備える。
【解決手段】走行駆動装置2により全方向に自走可能で且つ車両1下部に進入可能な台車本体3と、該台車本体3の台車フレーム3aに連結部材5を介して取り付けられるリフターフレーム4aに、前記台車フレーム3aの側面に沿う格納位置と前記車両1の各車輪1aを前後から挟み付けるように支持しつつリフトアップする展開位置との間で回動自在な一対のリフトバー4bを、前記車両1の車輪1aに対応させて枢着することによって形成したリフター4とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両搬送装置に関するものである。
【背景技術】
【0002】
従来、任意の位置に停車した車両を駐車施設における所定位置に搬送できるようにした入出車装置の一般的技術水準を示すものとしては、例えば、特許文献1がある。
【0003】
特許文献1に示される装置は、それぞれ車両支持機構及び走行機構を備える左側搬送台車と右側搬送台車とからなり、該左側搬送台車と右側搬送台車とがそれぞれ独立して移動しつつ、協働して車両を支持し、搬送するようになっている。
【0004】
前記左側搬送台車と右側搬送台車は、無線通信によってリアルタイムに情報交換を行うことにより、協働している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−169451号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に示されるような搬送台車では、車両の左右両側に充分な空きスペースがない場合、該車両の左右両側に搬送台車が寄り付くことができず、車両を搬送することができなくなるという欠点を有していた。
【0007】
又、車両の試験設備等においては、作業員が数人で車両を押しながら移動させることもあり、このような場合、作業員の負担が大きく、手間と時間がかかってしまうため、簡単な構成で車両を確実に搬送できる装置の開発が望まれていた。
【0008】
本発明は、斯かる実情に鑑み、車両の左右両側に充分な空きスペースがなくても、簡単な構成で車両を確実に搬送し得る車両搬送装置を提供しようとするものである。
【課題を解決するための手段】
【0009】
本発明は、走行駆動装置により全方向に自走可能で且つ車両下部に進入可能な台車本体と、
該台車本体の台車フレームに連結部材を介して取り付けられるリフターフレームに、前記台車フレームの側面に沿う格納位置と前記車両の各車輪を前後から挟み付けるように支持しつつリフトアップする展開位置との間で回動自在な一対のリフトバーを、前記車両の車輪に対応させて枢着することによって形成したリフターと
を備えたことを特徴とする車両搬送装置にかかるものである。
【0010】
上記手段によれば、以下のような作用が得られる。
【0011】
車両を搬送する際には、台車本体を車両下部に進入させ、リフターのリフトバーを格納位置から回動させ、各車輪を前後から挟み付けるように支持しつつリフトアップする展開位置まで回動させると、車両がリフターによって支持され、この状態で、走行駆動装置により台車本体を自走させれば、車両を搬送することが可能となる。
【0012】
この結果、特許文献1に示されるような搬送台車とは異なり、車両の左右両側に充分な空きスペースがなくても、車両の前後の少なくとも一方には必ずスペースはあるため、台車本体を車両下部に進入させることさえできれば、車両を搬送することができなくなる心配はない。
【0013】
又、本発明の車両搬送装置を車両の試験設備等において利用すれば、作業員が数人で車両を押しながら移動させなくて済み、作業員の負担が大幅に軽減され、手間と時間がかからなくなり、作業効率を向上させることが可能となる。
【0014】
前記車両搬送装置においては、前記台車フレームに水平旋回自在に取り付けられた転向フレームの中心部に、走行車輪を回転駆動自在に配設した走行ユニットにより、前記走行駆動装置を構成することができる。
【0015】
この場合、前記走行ユニットを台車フレームの前後方向へ間隔をあけて配設し、各走行ユニットの転向フレームの外周に設けたリングギヤに、該リングギヤ間に配設される転向駆動ピニオンを噛合させ、該転向駆動ピニオンを回転駆動することにより、前記各走行ユニットの転向フレームを同期して旋回させるよう構成することができ、このようにすると、一つの駆動系によって走行ユニットの走行車輪の向きを同時に変更することが可能となり、装置全体の重量を軽減し且つコストを削減する上で有効となる。
【0016】
一方、前記車両搬送装置においては、前記台車フレーム及びリフターフレームのいずれか一方に設けられ且つ上下方向へ延びるピンと、前記台車フレーム及びリフターフレームのいずれか他方に設けられ且つ前記ピンに嵌装されるブラケットとから前記連結部材を構成し、前記リフターに加わる車両の荷重を前記台車本体の走行駆動装置に伝えないよう構成することができ、このようにすると、走行駆動装置の走行車輪の耐荷重を大きくしなくて済み、該走行車輪の外径が小さく抑えられ、車両下部に進入させる必要があることから高さが制限される台車本体に走行車輪を搭載する上で有効となる。
【発明の効果】
【0017】
本発明の車両搬送装置によれば、車両の左右両側に充分な空きスペースがなくても、簡単な構成で車両を確実に搬送し得るという優れた効果を奏し得る。
【図面の簡単な説明】
【0018】
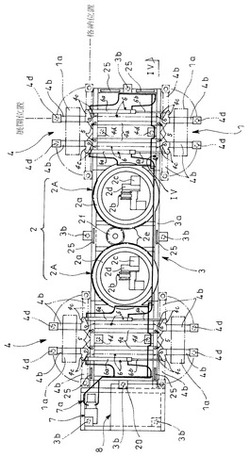
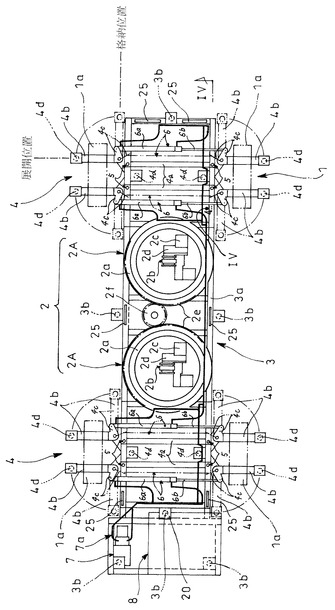
【図1】本発明の車両搬送装置の実施例を示す平面図である。
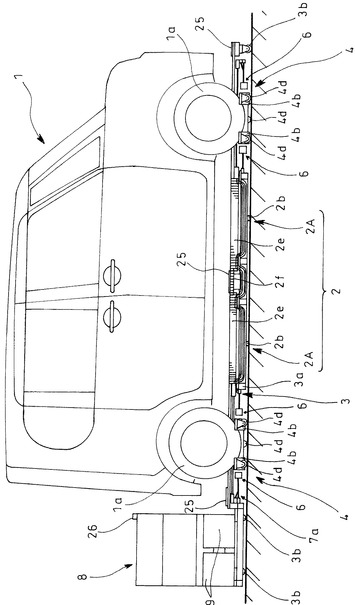
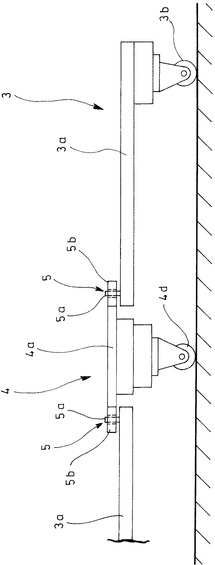
【図2】本発明の車両搬送装置の実施例を示す側面図である。
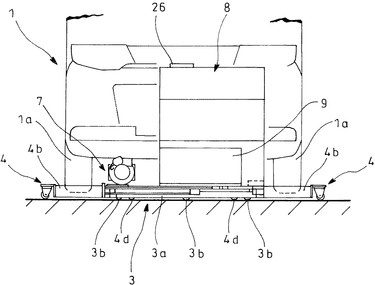
【図3】本発明の車両搬送装置の実施例を示す後面図である。
【図4】本発明の車両搬送装置の実施例における台車フレームとリフターフレームとをつなぐ連結部材を示す側面図であって、図1のIV−IV矢視相当図である。
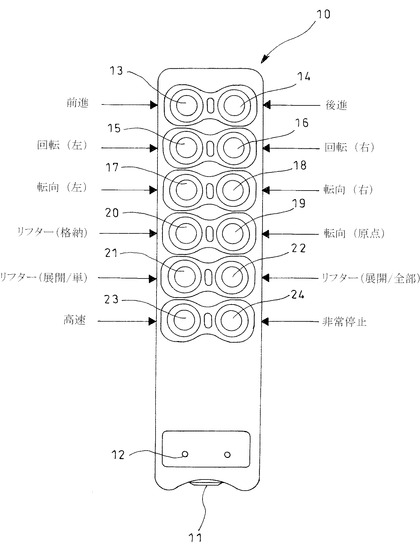
【図5】本発明の車両搬送装置の実施例における遠隔操作器を示す平面図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施の形態を添付図面を参照して説明する。
【0020】
図1〜図5は本発明の車両搬送装置の実施例であって、1は車両であり、走行駆動装置2により全方向に自走可能で且つ車両1下部に進入可能な台車本体3に、車両1をリフトアップするリフター4を設けたものである。
【0021】
前記台車本体3は、車両1の前後方向へ延びる台車フレーム3aの複数所要箇所にキャスタ3bを取り付けると共に、該台車フレーム3aの前後方向中間部に走行駆動装置2を設けてある。
【0022】
前記リフター4は、台車本体3の台車フレーム3aの前部と後部にそれぞれ連結部材5を介して取り付けられるリフターフレーム4aに、前記台車フレーム3aの側面に沿う格納位置と前記車両1の各車輪1aを前後から挟み付けるように支持しつつリフトアップする展開位置との間で回動自在な一対のリフトバー4bを、前記車両1の車輪1aに対応させて枢着することによって形成してある。
【0023】
本実施例の場合、前記車両1の車輪1aに対応させて一対のリフトバー4bを配設してあるが、その駆動に関しては、車輪1aの前側(図1の右側)に配設される左右二本のリフトバー4bを一組とし、且つ車輪1aの後側(図1の左側)に配設される左右二本のリフトバー4bを一組とし、該左右一組としたリフトバー4bの枢着点から張り出すリンク4cの先端部間に、車両1幅方向へ延びる油圧シリンダ6のシリンダ本体6a基端とロッド6b先端とを掛け渡すように連結し、該油圧シリンダ6を収縮させることにより、前記リフトバー4bを台車フレーム3aの側面に沿う格納位置に回動させる一方、前記油圧シリンダ6を伸長させることにより、前記リフトバー4bを車両1の各車輪1aを前後から挟み付けるように支持しつつリフトアップする展開位置に回動させるようにしてある。尚、前記リフターフレーム4aの複数所要箇所、並びにリフトバー4bの先端部にはそれぞれ、車両1の荷重を支持するキャスタ4dを取り付けてある。
【0024】
前記走行駆動装置2は、前記台車フレーム3aに水平旋回自在に取り付けられた円板状の転向フレーム2aの中心部に、走行車輪2bをモータ2cにより減速機2dを介して回転駆動自在に配設した走行ユニット2Aにより構成し、該走行ユニット2Aを台車フレーム3aの前後方向へ所要の間隔をあけて二基配設し、各走行ユニット2Aの転向フレーム2aの外周に設けたリングギヤ2eに、該リングギヤ2e間に配設される転向駆動ピニオン2fを噛合させ、該転向駆動ピニオン2fを図示していないモータにより減速機を介して回転駆動することにより、前記各走行ユニット2Aの転向フレーム2aを同期して旋回させるよう構成してある。
【0025】
前記連結部材5は、図4に示す如く、前記台車フレーム3aに設けられ且つ上下方向へ延びるピン5aと、前記リフターフレーム4aに設けられ且つ前記ピン5aに嵌装されるブラケット5bとから構成し、前記リフター4に加わる車両1の荷重を前記台車本体3の走行駆動装置2に伝えないよう構成してある。尚、前記上下方向へ延びるピン5aを台車フレーム3aの代わりにリフターフレーム4aに設け、前記ピン5aに嵌装されるブラケット5bをリフターフレーム4aの代わりに台車フレーム3aに設けて前記連結部材5を構成することも可能である。
【0026】
又、前記台車本体3の台車フレーム3a後部には、前記油圧シリンダ6への圧油の給排を油圧配管系統7aを介して行う油圧ユニット7と、前記台車本体3並びにリフター4の動作を制御する制御機器8と、該制御機器8やモータ2cに通電を行う鉛蓄電池等のバッテリー9とを搭載してある。
【0027】
一方、前記台車本体3並びにリフター4の動作は、遠隔操作器10によって作業員が遠隔操作できるようにしてあり、該遠隔操作器10は、図5に示す如く、メイン電源のオン・オフを行う電源スイッチ11と、該電源スイッチ11をオンにした際に点灯する電源表示灯12と、前記走行駆動装置2の二基の走行ユニット2Aの走行車輪2bを両輪とも同一の所定方向へ回転駆動することにより台車本体3を前進させる前進ボタン13と、前記走行駆動装置2の二基の走行ユニット2Aの走行車輪2bを両輪とも前進時とは反対方向へ回転駆動することにより台車本体3を後進させる後進ボタン14と、前記走行駆動装置2の二基の走行ユニット2Aの走行車輪2bを互いに相反する方向へ回転駆動することにより台車本体3を左回転(左旋回)させる左回転ボタン15と、前記走行駆動装置2の二基の走行ユニット2Aの走行車輪2bを左回転時とは反対となる互いに相反する方向へ回転駆動することにより台車本体3を右回転(右旋回)させる右回転ボタン16と、前記走行駆動装置2の二基の走行ユニット2Aの転向フレーム2aを左回転(左旋回)させる方向へ回転駆動することにより走行車輪2bの向きを左転向させる左転向ボタン17と、前記走行駆動装置2の二基の走行ユニット2Aの転向フレーム2aを右回転(右旋回)させる方向へ回転駆動することにより走行車輪2bの向きを右転向させる右転向ボタン18と、前記走行駆動装置2の二基の走行ユニット2Aの走行車輪2bの向きを予め設定した原点(例えば、図1に示す向き)に復帰させる原点復帰転向ボタン19と、前記リフター4のリフトバー4bを格納位置に回動させるリフター格納ボタン20と、前記リフター4のリフトバー4bのうち車両1の後側の車輪1aの後方に配置されるリフトバー4bのみを単独で展開位置に回動させるリフター単独展開ボタン21と、前記リフター4のリフトバー4b全部を展開位置に回動させるリフター全部展開ボタン22と、前記前進ボタン13或いは後進ボタン14が押されて台車本体3を前進或いは後進させている間に走行速度を増加させる高速ボタン23と、緊急時に台車本体3並びにリフター4の動作を停止させる非常停止ボタン24とを備えている。
【0028】
前記台車本体3の台車フレーム3aにおける上面の複数所要箇所には、車両1下面に接触した場合にオンとなって車両1に対し台車フレーム3aが干渉していることを知らせるテープ状スイッチ25を貼り付けてある。
【0029】
又、前記台車本体3の台車フレーム3a後部に搭載された制御機器8の車両1と対面する所要箇所には、該車両1との距離が設定値未満となった際に警報を発する超音波センサ26を取り付けてある。
【0030】
次に、上記実施例の作用を説明する。
【0031】
車両1を搬送する際には、先ず、遠隔操作器10の電源スイッチ11をオンにし、台車本体3を車両1の後方に位置させ、リフター4のリフトバー4bを全て格納位置に回動させた状態から、リフター単独展開ボタン21を押してリフター4のリフトバー4bのうち車両1の後側の車輪1aの後方に配置されるリフトバー4bのみを単独で展開位置に回動させておく。
【0032】
続いて、前記遠隔操作器10の原点復帰転向ボタン19を押して走行駆動装置2の二基の走行ユニット2Aの走行車輪2bの向きを予め設定した原点(例えば、図1に示す向き)に一旦復帰させた後、前記遠隔操作器10の右転向ボタン18を押して走行駆動装置2の二基の走行ユニット2Aの転向フレーム2aを右回転(右旋回)させる方向へ回転駆動することにより走行車輪2bの向きを右転向させ、図1に示す向きから90°位相を変える。
【0033】
この後、前記遠隔操作器10の前進ボタン13を押して台車本体3を前進させると、該台車本体3を車両1下部に進入させることが可能となる。
【0034】
ここで、前記リフター4のリフトバー4bのうち車両1の後側の車輪1aの後方に配置されるリフトバー4bのみを単独で展開位置に回動させてあるため、該リフトバー4bが車両1の後側の車輪1aに接触する位置まで前記台車本体3を前進させ停止させるようにすれば、特別なセンサ等を用いなくても、車両1に対する台車本体3の位置決めを簡単且つ自動的に行うことができる。
【0035】
この状態から、前記遠隔操作器10のリフター全部展開ボタン22を押すと、既に展開位置にあるリフター4のリフトバー4bを除く残りのリフトバー4b全部が格納位置から展開位置に回動するため、各車輪1aを前後から挟み付けるように支持しつつリフトアップすることが可能となる。
【0036】
次に、前記遠隔操作器10の前進ボタン13を押せば、車両1を前進させる方向へ搬送することが可能となり、前記遠隔操作器10の後進ボタン14を押せば、車両1を後進させる方向へ搬送することが可能となる。該台車本体3を前進或いは後進させている間に前記遠隔操作器10の高速ボタン23を押すと、走行速度を増加させることが可能となる。
【0037】
又、前記遠隔操作器10の左転向ボタン17を押して走行駆動装置2の二基の走行ユニット2Aの転向フレーム2aを左回転(左旋回)させる方向へ回転駆動することにより走行車輪2bの向きを左転向させ、例えば、左45°の向きで、前記遠隔操作器10の前進ボタン13を押せば、車両1を左斜め前方へ前進させる方向へ搬送することが可能となり、前記遠隔操作器10の後進ボタン14を押せば、車両1を右斜め後方へ後進させる方向へ搬送することが可能となる。
【0038】
更に又、前記遠隔操作器10の原点復帰転向ボタン19を押して走行駆動装置2の二基の走行ユニット2Aの走行車輪2bの向きを予め設定した原点(例えば、図1に示す向き)に一旦復帰させた後、前記遠隔操作器10の左回転ボタン15を押せば、前記走行駆動装置2の二基の走行ユニット2Aの走行車輪2bを互いに相反する方向へ回転駆動することにより前記車両1が搭載された台車本体3をその位置で左回転(左旋回)させ、車両1の向きを変更することが可能となり、前記遠隔操作器10の右回転ボタン16を押せば、前記走行駆動装置2の二基の走行ユニット2Aの走行車輪2bを左回転時とは反対となる互いに相反する方向へ回転駆動することにより前記車両1が搭載された台車本体3をその位置で右回転(右旋回)させ、車両1の向きを変更することが可能となる。
【0039】
前記車両1が搭載された台車本体3を所定の位置へ移動させ、必要に応じて車両1の向きを変更した後、前記遠隔操作器10のリフター格納ボタン20を押すと、前記リフター4のリフトバー4bが格納位置に回動し、前記車両1がリフトアップされていた状態から地上に降ろされ、走行車輪2bの向きを図1に示す向きから90°位相を変えた状態で、前記遠隔操作器10の後進ボタン14を押して台車本体3を後進させると、該台車本体3を車両1下部から引き出すことが可能となり、車両1の搬送が完了する。
【0040】
尚、上述の例では、前記台車本体3を車両1の後方から進入させる場合について説明したが、該台車本体3を車両1の前方から進入させても同様に車両1の搬送を行えることは言うまでもない。
【0041】
この結果、特許文献1に示されるような搬送台車とは異なり、車両1の左右両側に充分な空きスペースがなくても、車両1の前後の少なくとも一方には必ずスペースはあるため、台車本体3を車両1下部に進入させることさえできれば、車両1を搬送することができなくなる心配はない。
【0042】
又、本実施例の車両搬送装置を車両1の試験設備等において利用すれば、作業員が数人で車両1を押しながら移動させなくて済み、作業員の負担が大幅に軽減され、手間と時間がかからなくなり、作業効率を向上させることが可能となる。
【0043】
更に又、前記車両搬送装置においては、前記台車フレーム3aに水平旋回自在に取り付けられた転向フレーム2aの中心部に、走行車輪2bを回転駆動自在に配設した走行ユニット2Aにより、前記走行駆動装置2を構成し、前記走行ユニット2Aを台車フレーム3aの前後方向へ所要の間隔をあけて配設し、各走行ユニット2Aの転向フレーム2aの外周に設けたリングギヤ2eに、該リングギヤ2e間に配設される転向駆動ピニオン2fを噛合させ、該転向駆動ピニオン2fを回転駆動することにより、前記各走行ユニット2Aの転向フレーム2aを同期して旋回させるよう構成してあるため、一つの駆動系によって走行ユニット2Aの走行車輪2bの向きを同時に変更することが可能となり、装置全体の重量を軽減し且つコストを削減する上で有効となる。
【0044】
一方、前記車両搬送装置においては、前記台車フレーム3a及びリフターフレーム4aのいずれか一方に設けられ且つ上下方向へ延びるピン5aと、前記台車フレーム3a及びリフターフレーム4aのいずれか他方に設けられ且つ前記ピン5aに嵌装されるブラケット5bとから前記連結部材5を構成し、前記リフター4に加わる車両1の荷重を前記台車本体3の走行駆動装置2に伝えないよう構成してあるため、走行駆動装置2の走行車輪2bの耐荷重を大きくしなくて済み、該走行車輪2bの外径が小さく抑えられ、車両1下部に進入させる必要があることから高さが制限される台車本体3に走行車輪2bを搭載する上で有効となる。
【0045】
こうして、車両1の左右両側に充分な空きスペースがなくても、簡単な構成で車両1を確実に搬送し得る。
【0046】
尚、本発明の車両搬送装置は、上述の実施例にのみ限定されるものではなく、台車フレームに伸縮機構を設けるようにすれば、ホイールベースの異なる車両にも適用可能となること等、その他、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【符号の説明】
【0047】
1 車両
1a 車輪
2 走行駆動装置
2A 走行ユニット
2a 転向フレーム
2b 走行車輪
2e リングギヤ
2f 転向駆動ピニオン
3 台車本体
3a 台車フレーム
4 リフター
4a リフターフレーム
4b リフトバー
5 連結部材
5a ピン
5b ブラケット
6 油圧シリンダ
【技術分野】
【0001】
本発明は、車両搬送装置に関するものである。
【背景技術】
【0002】
従来、任意の位置に停車した車両を駐車施設における所定位置に搬送できるようにした入出車装置の一般的技術水準を示すものとしては、例えば、特許文献1がある。
【0003】
特許文献1に示される装置は、それぞれ車両支持機構及び走行機構を備える左側搬送台車と右側搬送台車とからなり、該左側搬送台車と右側搬送台車とがそれぞれ独立して移動しつつ、協働して車両を支持し、搬送するようになっている。
【0004】
前記左側搬送台車と右側搬送台車は、無線通信によってリアルタイムに情報交換を行うことにより、協働している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−169451号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に示されるような搬送台車では、車両の左右両側に充分な空きスペースがない場合、該車両の左右両側に搬送台車が寄り付くことができず、車両を搬送することができなくなるという欠点を有していた。
【0007】
又、車両の試験設備等においては、作業員が数人で車両を押しながら移動させることもあり、このような場合、作業員の負担が大きく、手間と時間がかかってしまうため、簡単な構成で車両を確実に搬送できる装置の開発が望まれていた。
【0008】
本発明は、斯かる実情に鑑み、車両の左右両側に充分な空きスペースがなくても、簡単な構成で車両を確実に搬送し得る車両搬送装置を提供しようとするものである。
【課題を解決するための手段】
【0009】
本発明は、走行駆動装置により全方向に自走可能で且つ車両下部に進入可能な台車本体と、
該台車本体の台車フレームに連結部材を介して取り付けられるリフターフレームに、前記台車フレームの側面に沿う格納位置と前記車両の各車輪を前後から挟み付けるように支持しつつリフトアップする展開位置との間で回動自在な一対のリフトバーを、前記車両の車輪に対応させて枢着することによって形成したリフターと
を備えたことを特徴とする車両搬送装置にかかるものである。
【0010】
上記手段によれば、以下のような作用が得られる。
【0011】
車両を搬送する際には、台車本体を車両下部に進入させ、リフターのリフトバーを格納位置から回動させ、各車輪を前後から挟み付けるように支持しつつリフトアップする展開位置まで回動させると、車両がリフターによって支持され、この状態で、走行駆動装置により台車本体を自走させれば、車両を搬送することが可能となる。
【0012】
この結果、特許文献1に示されるような搬送台車とは異なり、車両の左右両側に充分な空きスペースがなくても、車両の前後の少なくとも一方には必ずスペースはあるため、台車本体を車両下部に進入させることさえできれば、車両を搬送することができなくなる心配はない。
【0013】
又、本発明の車両搬送装置を車両の試験設備等において利用すれば、作業員が数人で車両を押しながら移動させなくて済み、作業員の負担が大幅に軽減され、手間と時間がかからなくなり、作業効率を向上させることが可能となる。
【0014】
前記車両搬送装置においては、前記台車フレームに水平旋回自在に取り付けられた転向フレームの中心部に、走行車輪を回転駆動自在に配設した走行ユニットにより、前記走行駆動装置を構成することができる。
【0015】
この場合、前記走行ユニットを台車フレームの前後方向へ間隔をあけて配設し、各走行ユニットの転向フレームの外周に設けたリングギヤに、該リングギヤ間に配設される転向駆動ピニオンを噛合させ、該転向駆動ピニオンを回転駆動することにより、前記各走行ユニットの転向フレームを同期して旋回させるよう構成することができ、このようにすると、一つの駆動系によって走行ユニットの走行車輪の向きを同時に変更することが可能となり、装置全体の重量を軽減し且つコストを削減する上で有効となる。
【0016】
一方、前記車両搬送装置においては、前記台車フレーム及びリフターフレームのいずれか一方に設けられ且つ上下方向へ延びるピンと、前記台車フレーム及びリフターフレームのいずれか他方に設けられ且つ前記ピンに嵌装されるブラケットとから前記連結部材を構成し、前記リフターに加わる車両の荷重を前記台車本体の走行駆動装置に伝えないよう構成することができ、このようにすると、走行駆動装置の走行車輪の耐荷重を大きくしなくて済み、該走行車輪の外径が小さく抑えられ、車両下部に進入させる必要があることから高さが制限される台車本体に走行車輪を搭載する上で有効となる。
【発明の効果】
【0017】
本発明の車両搬送装置によれば、車両の左右両側に充分な空きスペースがなくても、簡単な構成で車両を確実に搬送し得るという優れた効果を奏し得る。
【図面の簡単な説明】
【0018】
【図1】本発明の車両搬送装置の実施例を示す平面図である。
【図2】本発明の車両搬送装置の実施例を示す側面図である。
【図3】本発明の車両搬送装置の実施例を示す後面図である。
【図4】本発明の車両搬送装置の実施例における台車フレームとリフターフレームとをつなぐ連結部材を示す側面図であって、図1のIV−IV矢視相当図である。
【図5】本発明の車両搬送装置の実施例における遠隔操作器を示す平面図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施の形態を添付図面を参照して説明する。
【0020】
図1〜図5は本発明の車両搬送装置の実施例であって、1は車両であり、走行駆動装置2により全方向に自走可能で且つ車両1下部に進入可能な台車本体3に、車両1をリフトアップするリフター4を設けたものである。
【0021】
前記台車本体3は、車両1の前後方向へ延びる台車フレーム3aの複数所要箇所にキャスタ3bを取り付けると共に、該台車フレーム3aの前後方向中間部に走行駆動装置2を設けてある。
【0022】
前記リフター4は、台車本体3の台車フレーム3aの前部と後部にそれぞれ連結部材5を介して取り付けられるリフターフレーム4aに、前記台車フレーム3aの側面に沿う格納位置と前記車両1の各車輪1aを前後から挟み付けるように支持しつつリフトアップする展開位置との間で回動自在な一対のリフトバー4bを、前記車両1の車輪1aに対応させて枢着することによって形成してある。
【0023】
本実施例の場合、前記車両1の車輪1aに対応させて一対のリフトバー4bを配設してあるが、その駆動に関しては、車輪1aの前側(図1の右側)に配設される左右二本のリフトバー4bを一組とし、且つ車輪1aの後側(図1の左側)に配設される左右二本のリフトバー4bを一組とし、該左右一組としたリフトバー4bの枢着点から張り出すリンク4cの先端部間に、車両1幅方向へ延びる油圧シリンダ6のシリンダ本体6a基端とロッド6b先端とを掛け渡すように連結し、該油圧シリンダ6を収縮させることにより、前記リフトバー4bを台車フレーム3aの側面に沿う格納位置に回動させる一方、前記油圧シリンダ6を伸長させることにより、前記リフトバー4bを車両1の各車輪1aを前後から挟み付けるように支持しつつリフトアップする展開位置に回動させるようにしてある。尚、前記リフターフレーム4aの複数所要箇所、並びにリフトバー4bの先端部にはそれぞれ、車両1の荷重を支持するキャスタ4dを取り付けてある。
【0024】
前記走行駆動装置2は、前記台車フレーム3aに水平旋回自在に取り付けられた円板状の転向フレーム2aの中心部に、走行車輪2bをモータ2cにより減速機2dを介して回転駆動自在に配設した走行ユニット2Aにより構成し、該走行ユニット2Aを台車フレーム3aの前後方向へ所要の間隔をあけて二基配設し、各走行ユニット2Aの転向フレーム2aの外周に設けたリングギヤ2eに、該リングギヤ2e間に配設される転向駆動ピニオン2fを噛合させ、該転向駆動ピニオン2fを図示していないモータにより減速機を介して回転駆動することにより、前記各走行ユニット2Aの転向フレーム2aを同期して旋回させるよう構成してある。
【0025】
前記連結部材5は、図4に示す如く、前記台車フレーム3aに設けられ且つ上下方向へ延びるピン5aと、前記リフターフレーム4aに設けられ且つ前記ピン5aに嵌装されるブラケット5bとから構成し、前記リフター4に加わる車両1の荷重を前記台車本体3の走行駆動装置2に伝えないよう構成してある。尚、前記上下方向へ延びるピン5aを台車フレーム3aの代わりにリフターフレーム4aに設け、前記ピン5aに嵌装されるブラケット5bをリフターフレーム4aの代わりに台車フレーム3aに設けて前記連結部材5を構成することも可能である。
【0026】
又、前記台車本体3の台車フレーム3a後部には、前記油圧シリンダ6への圧油の給排を油圧配管系統7aを介して行う油圧ユニット7と、前記台車本体3並びにリフター4の動作を制御する制御機器8と、該制御機器8やモータ2cに通電を行う鉛蓄電池等のバッテリー9とを搭載してある。
【0027】
一方、前記台車本体3並びにリフター4の動作は、遠隔操作器10によって作業員が遠隔操作できるようにしてあり、該遠隔操作器10は、図5に示す如く、メイン電源のオン・オフを行う電源スイッチ11と、該電源スイッチ11をオンにした際に点灯する電源表示灯12と、前記走行駆動装置2の二基の走行ユニット2Aの走行車輪2bを両輪とも同一の所定方向へ回転駆動することにより台車本体3を前進させる前進ボタン13と、前記走行駆動装置2の二基の走行ユニット2Aの走行車輪2bを両輪とも前進時とは反対方向へ回転駆動することにより台車本体3を後進させる後進ボタン14と、前記走行駆動装置2の二基の走行ユニット2Aの走行車輪2bを互いに相反する方向へ回転駆動することにより台車本体3を左回転(左旋回)させる左回転ボタン15と、前記走行駆動装置2の二基の走行ユニット2Aの走行車輪2bを左回転時とは反対となる互いに相反する方向へ回転駆動することにより台車本体3を右回転(右旋回)させる右回転ボタン16と、前記走行駆動装置2の二基の走行ユニット2Aの転向フレーム2aを左回転(左旋回)させる方向へ回転駆動することにより走行車輪2bの向きを左転向させる左転向ボタン17と、前記走行駆動装置2の二基の走行ユニット2Aの転向フレーム2aを右回転(右旋回)させる方向へ回転駆動することにより走行車輪2bの向きを右転向させる右転向ボタン18と、前記走行駆動装置2の二基の走行ユニット2Aの走行車輪2bの向きを予め設定した原点(例えば、図1に示す向き)に復帰させる原点復帰転向ボタン19と、前記リフター4のリフトバー4bを格納位置に回動させるリフター格納ボタン20と、前記リフター4のリフトバー4bのうち車両1の後側の車輪1aの後方に配置されるリフトバー4bのみを単独で展開位置に回動させるリフター単独展開ボタン21と、前記リフター4のリフトバー4b全部を展開位置に回動させるリフター全部展開ボタン22と、前記前進ボタン13或いは後進ボタン14が押されて台車本体3を前進或いは後進させている間に走行速度を増加させる高速ボタン23と、緊急時に台車本体3並びにリフター4の動作を停止させる非常停止ボタン24とを備えている。
【0028】
前記台車本体3の台車フレーム3aにおける上面の複数所要箇所には、車両1下面に接触した場合にオンとなって車両1に対し台車フレーム3aが干渉していることを知らせるテープ状スイッチ25を貼り付けてある。
【0029】
又、前記台車本体3の台車フレーム3a後部に搭載された制御機器8の車両1と対面する所要箇所には、該車両1との距離が設定値未満となった際に警報を発する超音波センサ26を取り付けてある。
【0030】
次に、上記実施例の作用を説明する。
【0031】
車両1を搬送する際には、先ず、遠隔操作器10の電源スイッチ11をオンにし、台車本体3を車両1の後方に位置させ、リフター4のリフトバー4bを全て格納位置に回動させた状態から、リフター単独展開ボタン21を押してリフター4のリフトバー4bのうち車両1の後側の車輪1aの後方に配置されるリフトバー4bのみを単独で展開位置に回動させておく。
【0032】
続いて、前記遠隔操作器10の原点復帰転向ボタン19を押して走行駆動装置2の二基の走行ユニット2Aの走行車輪2bの向きを予め設定した原点(例えば、図1に示す向き)に一旦復帰させた後、前記遠隔操作器10の右転向ボタン18を押して走行駆動装置2の二基の走行ユニット2Aの転向フレーム2aを右回転(右旋回)させる方向へ回転駆動することにより走行車輪2bの向きを右転向させ、図1に示す向きから90°位相を変える。
【0033】
この後、前記遠隔操作器10の前進ボタン13を押して台車本体3を前進させると、該台車本体3を車両1下部に進入させることが可能となる。
【0034】
ここで、前記リフター4のリフトバー4bのうち車両1の後側の車輪1aの後方に配置されるリフトバー4bのみを単独で展開位置に回動させてあるため、該リフトバー4bが車両1の後側の車輪1aに接触する位置まで前記台車本体3を前進させ停止させるようにすれば、特別なセンサ等を用いなくても、車両1に対する台車本体3の位置決めを簡単且つ自動的に行うことができる。
【0035】
この状態から、前記遠隔操作器10のリフター全部展開ボタン22を押すと、既に展開位置にあるリフター4のリフトバー4bを除く残りのリフトバー4b全部が格納位置から展開位置に回動するため、各車輪1aを前後から挟み付けるように支持しつつリフトアップすることが可能となる。
【0036】
次に、前記遠隔操作器10の前進ボタン13を押せば、車両1を前進させる方向へ搬送することが可能となり、前記遠隔操作器10の後進ボタン14を押せば、車両1を後進させる方向へ搬送することが可能となる。該台車本体3を前進或いは後進させている間に前記遠隔操作器10の高速ボタン23を押すと、走行速度を増加させることが可能となる。
【0037】
又、前記遠隔操作器10の左転向ボタン17を押して走行駆動装置2の二基の走行ユニット2Aの転向フレーム2aを左回転(左旋回)させる方向へ回転駆動することにより走行車輪2bの向きを左転向させ、例えば、左45°の向きで、前記遠隔操作器10の前進ボタン13を押せば、車両1を左斜め前方へ前進させる方向へ搬送することが可能となり、前記遠隔操作器10の後進ボタン14を押せば、車両1を右斜め後方へ後進させる方向へ搬送することが可能となる。
【0038】
更に又、前記遠隔操作器10の原点復帰転向ボタン19を押して走行駆動装置2の二基の走行ユニット2Aの走行車輪2bの向きを予め設定した原点(例えば、図1に示す向き)に一旦復帰させた後、前記遠隔操作器10の左回転ボタン15を押せば、前記走行駆動装置2の二基の走行ユニット2Aの走行車輪2bを互いに相反する方向へ回転駆動することにより前記車両1が搭載された台車本体3をその位置で左回転(左旋回)させ、車両1の向きを変更することが可能となり、前記遠隔操作器10の右回転ボタン16を押せば、前記走行駆動装置2の二基の走行ユニット2Aの走行車輪2bを左回転時とは反対となる互いに相反する方向へ回転駆動することにより前記車両1が搭載された台車本体3をその位置で右回転(右旋回)させ、車両1の向きを変更することが可能となる。
【0039】
前記車両1が搭載された台車本体3を所定の位置へ移動させ、必要に応じて車両1の向きを変更した後、前記遠隔操作器10のリフター格納ボタン20を押すと、前記リフター4のリフトバー4bが格納位置に回動し、前記車両1がリフトアップされていた状態から地上に降ろされ、走行車輪2bの向きを図1に示す向きから90°位相を変えた状態で、前記遠隔操作器10の後進ボタン14を押して台車本体3を後進させると、該台車本体3を車両1下部から引き出すことが可能となり、車両1の搬送が完了する。
【0040】
尚、上述の例では、前記台車本体3を車両1の後方から進入させる場合について説明したが、該台車本体3を車両1の前方から進入させても同様に車両1の搬送を行えることは言うまでもない。
【0041】
この結果、特許文献1に示されるような搬送台車とは異なり、車両1の左右両側に充分な空きスペースがなくても、車両1の前後の少なくとも一方には必ずスペースはあるため、台車本体3を車両1下部に進入させることさえできれば、車両1を搬送することができなくなる心配はない。
【0042】
又、本実施例の車両搬送装置を車両1の試験設備等において利用すれば、作業員が数人で車両1を押しながら移動させなくて済み、作業員の負担が大幅に軽減され、手間と時間がかからなくなり、作業効率を向上させることが可能となる。
【0043】
更に又、前記車両搬送装置においては、前記台車フレーム3aに水平旋回自在に取り付けられた転向フレーム2aの中心部に、走行車輪2bを回転駆動自在に配設した走行ユニット2Aにより、前記走行駆動装置2を構成し、前記走行ユニット2Aを台車フレーム3aの前後方向へ所要の間隔をあけて配設し、各走行ユニット2Aの転向フレーム2aの外周に設けたリングギヤ2eに、該リングギヤ2e間に配設される転向駆動ピニオン2fを噛合させ、該転向駆動ピニオン2fを回転駆動することにより、前記各走行ユニット2Aの転向フレーム2aを同期して旋回させるよう構成してあるため、一つの駆動系によって走行ユニット2Aの走行車輪2bの向きを同時に変更することが可能となり、装置全体の重量を軽減し且つコストを削減する上で有効となる。
【0044】
一方、前記車両搬送装置においては、前記台車フレーム3a及びリフターフレーム4aのいずれか一方に設けられ且つ上下方向へ延びるピン5aと、前記台車フレーム3a及びリフターフレーム4aのいずれか他方に設けられ且つ前記ピン5aに嵌装されるブラケット5bとから前記連結部材5を構成し、前記リフター4に加わる車両1の荷重を前記台車本体3の走行駆動装置2に伝えないよう構成してあるため、走行駆動装置2の走行車輪2bの耐荷重を大きくしなくて済み、該走行車輪2bの外径が小さく抑えられ、車両1下部に進入させる必要があることから高さが制限される台車本体3に走行車輪2bを搭載する上で有効となる。
【0045】
こうして、車両1の左右両側に充分な空きスペースがなくても、簡単な構成で車両1を確実に搬送し得る。
【0046】
尚、本発明の車両搬送装置は、上述の実施例にのみ限定されるものではなく、台車フレームに伸縮機構を設けるようにすれば、ホイールベースの異なる車両にも適用可能となること等、その他、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【符号の説明】
【0047】
1 車両
1a 車輪
2 走行駆動装置
2A 走行ユニット
2a 転向フレーム
2b 走行車輪
2e リングギヤ
2f 転向駆動ピニオン
3 台車本体
3a 台車フレーム
4 リフター
4a リフターフレーム
4b リフトバー
5 連結部材
5a ピン
5b ブラケット
6 油圧シリンダ
【特許請求の範囲】
【請求項1】
走行駆動装置により全方向に自走可能で且つ車両下部に進入可能な台車本体と、
該台車本体の台車フレームに連結部材を介して取り付けられるリフターフレームに、前記台車フレームの側面に沿う格納位置と前記車両の各車輪を前後から挟み付けるように支持しつつリフトアップする展開位置との間で回動自在な一対のリフトバーを、前記車両の車輪に対応させて枢着することによって形成したリフターと
を備えたことを特徴とする車両搬送装置。
【請求項2】
前記台車フレームに水平旋回自在に取り付けられた転向フレームの中心部に、走行車輪を回転駆動自在に配設した走行ユニットにより、前記走行駆動装置を構成した請求項1記載の車両搬送装置。
【請求項3】
前記走行ユニットを台車フレームの前後方向へ間隔をあけて配設し、各走行ユニットの転向フレームの外周に設けたリングギヤに、該リングギヤ間に配設される転向駆動ピニオンを噛合させ、該転向駆動ピニオンを回転駆動することにより、前記各走行ユニットの転向フレームを同期して旋回させるよう構成した請求項2記載の車両搬送装置。
【請求項4】
前記台車フレーム及びリフターフレームのいずれか一方に設けられ且つ上下方向へ延びるピンと、前記台車フレーム及びリフターフレームのいずれか他方に設けられ且つ前記ピンに嵌装されるブラケットとから前記連結部材を構成し、前記リフターに加わる車両の荷重を前記台車本体の走行駆動装置に伝えないよう構成した請求項2又は3記載の車両搬送装置。
【請求項1】
走行駆動装置により全方向に自走可能で且つ車両下部に進入可能な台車本体と、
該台車本体の台車フレームに連結部材を介して取り付けられるリフターフレームに、前記台車フレームの側面に沿う格納位置と前記車両の各車輪を前後から挟み付けるように支持しつつリフトアップする展開位置との間で回動自在な一対のリフトバーを、前記車両の車輪に対応させて枢着することによって形成したリフターと
を備えたことを特徴とする車両搬送装置。
【請求項2】
前記台車フレームに水平旋回自在に取り付けられた転向フレームの中心部に、走行車輪を回転駆動自在に配設した走行ユニットにより、前記走行駆動装置を構成した請求項1記載の車両搬送装置。
【請求項3】
前記走行ユニットを台車フレームの前後方向へ間隔をあけて配設し、各走行ユニットの転向フレームの外周に設けたリングギヤに、該リングギヤ間に配設される転向駆動ピニオンを噛合させ、該転向駆動ピニオンを回転駆動することにより、前記各走行ユニットの転向フレームを同期して旋回させるよう構成した請求項2記載の車両搬送装置。
【請求項4】
前記台車フレーム及びリフターフレームのいずれか一方に設けられ且つ上下方向へ延びるピンと、前記台車フレーム及びリフターフレームのいずれか他方に設けられ且つ前記ピンに嵌装されるブラケットとから前記連結部材を構成し、前記リフターに加わる車両の荷重を前記台車本体の走行駆動装置に伝えないよう構成した請求項2又は3記載の車両搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−19210(P2013−19210A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2011−154800(P2011−154800)
【出願日】平成23年7月13日(2011.7.13)
【出願人】(000198363)IHI運搬機械株式会社 (292)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成23年7月13日(2011.7.13)
【出願人】(000198363)IHI運搬機械株式会社 (292)
[ Back to top ]