
車両搭載用発電装置
【課題】エンジンによってジェネレータを駆動して発電を行う車両搭載用発電装置におけるエネルギー損失を抑制することを目的とする。
【解決手段】シリーズハイブリッド車両駆動システムは、発電の際のエネルギー損失を抑制するという観点から求められた第1電圧目標値、およびユーザの運転操作に応じた走行制御を確保するという観点から求められた第2電圧目標値のうち、値が大きい方に昇圧電圧Vhを一致させる制御を実行する。昇圧電圧Vhを第2電圧目標値とする制御を実行した場合には、発電の際のエネルギー損失が増大することがある。そこで、シリーズハイブリッド車両駆動システムにおいては間欠発電制御が行われる。間欠発電制御は、エンジン12の始動および停止の繰り返しにより、間欠的にモータジェネレータMG1を駆動する制御である。
【解決手段】シリーズハイブリッド車両駆動システムは、発電の際のエネルギー損失を抑制するという観点から求められた第1電圧目標値、およびユーザの運転操作に応じた走行制御を確保するという観点から求められた第2電圧目標値のうち、値が大きい方に昇圧電圧Vhを一致させる制御を実行する。昇圧電圧Vhを第2電圧目標値とする制御を実行した場合には、発電の際のエネルギー損失が増大することがある。そこで、シリーズハイブリッド車両駆動システムにおいては間欠発電制御が行われる。間欠発電制御は、エンジン12の始動および停止の繰り返しにより、間欠的にモータジェネレータMG1を駆動する制御である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両搭載用発電装置に関し、特に、エンジンによってジェネレータを駆動して発電を行う装置の改良に関する。
【背景技術】
【0002】
シリーズハイブリッド自動車につき広く研究開発が行われている。シリーズハイブリッド自動車は、エンジンによってジェネレータを駆動して発電を行い、発電電力によって走行用モータを駆動して車両を走行させる。ジェネレータによる発電電力のうち車両の走行に用いられない電力、および走行用モータによる回生電力は、繰り返して充放電が可能な二次電池に供給される。二次電池に充電された電力は、走行制御に応じて走行用モータに供給され、走行電力として用いられる。シリーズハイブリッド自動車によれば、エンジンによる発電電力および回生電力を走行電力として用いることができる。
【0003】
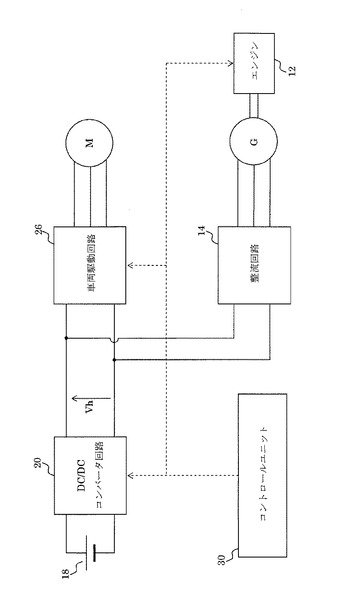
図9には、シリーズハイブリッド自動車に搭載される車両駆動システムが示されている。このシリーズハイブリッド車両駆動システムは、二次電池18、DC/DCコンバータ回路20、車両駆動回路26、走行用モータM、エンジン12、ジェネレータG、整流回路14およびコントロールユニット30を備える。
【0004】
エンジン12は、ジェネレータGにトルクを与え、ジェネレータGはそのトルクによって発電を行う。整流回路14は、ジェネレータGの交流発電電力を直流電力に変換し、車両駆動回路26に至る電力経路にその直流電力を出力する。DC/DCコンバータ回路20は、二次電池18の出力電圧を昇圧し、整流回路14と車両駆動回路26との間の電力経路に昇圧後の電圧Vhを出力する。コントロールユニット30は、エンジン12、車両駆動回路26およびDC/DCコンバータ回路20を制御する。
【0005】
特許文献1には、シリーズハイブリッド自動車について記載されている。このシリーズハイブリッド自動車においては、ジェネレータが出力する交流発電電圧を整流する整流器が設けられている。整流器が出力する直流電圧は、昇圧チョッパ回路によって電圧値が調整された後、二次電池(バッテリ)に印加される。特許文献1には、さらに、昇圧チョッパ回路の制御によりバッテリの電圧制御を行う旨が記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平6−245322号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
図9に示されるシリーズハイブリッド車両駆動システムには、コントロールユニット30が、次のような制御を実行するものがある。すなわち、コントロールユニット30は、ジェネレータGに対する発電電力要求値に基づいて、DC/DCコンバータ回路20から出力される昇圧電圧Vhに対する仮の目標値として第1電圧目標値を求める。さらに、走行用モータMの制御に応じて、DC/DCコンバータ回路20から出力される昇圧電圧に対する仮の目標値として第2電圧目標値を求める。そして、第2電圧目標値が第1電圧目標値より大きいときは、ユーザの運転操作に応じた走行制御を確保するため、コントロールユニット30は、昇圧電圧Vhが第2電圧目標値となるようDC/DCコンバータ回路20を制御する。他方、第2電圧目標値が第1電圧目標値以下であるときは、整流回路14に流れる電流を抑制するため、コントロールユニット30は、昇圧電圧Vhが第1電圧目標値となるようDC/DCコンバータ回路20を制御する。
【0008】
しかし、DC/DCコンバータ回路20の昇圧電圧Vhを、ただ単に第1電圧目標値または第2電圧目標値のいずれか一方に設定したのでは、シリーズハイブリッド車両駆動システムにおけるエネルギー損失を抑制することが困難となる場合があった。
【0009】
本発明は、エンジンによってジェネレータを駆動して発電を行う車両搭載用発電装置におけるエネルギー損失を抑制することを目的とする。
【課題を解決するための手段】
【0010】
本発明は、エンジンと、前記エンジンを制御するエンジン制御部と、前記エンジンとの間でトルクを作用し合うジェネレータと、前記ジェネレータの交流発電電力を直流電力に変換し、車両を電力駆動する車両駆動部に至る電力経路にその直流電力を出力する整流回路と、前記整流回路と前記車両駆動部との間の電力経路に、二次電池の出力電圧を調整した電力経路電圧を出力すると共に、前記電力経路と前記二次電池との間で電力を伝達するコンバータ回路と、前記コンバータ回路を制御し、前記電力経路電圧を調整する電圧制御部と、前記二次電池の充電状態に基づいて前記ジェネレータに対する発電電力要求値を決定する発電電力要求値決定部と、を備え、前記電圧制御部は、前記車両駆動部の動作に応じて前記電力経路電圧の目標値を決定し、前記電力経路電圧を前記目標値に調整し、前記エンジン制御部は、前記発電電力要求値に基づいて前記エンジンを制御する、ことを特徴とする。
【0011】
また、本発明に係る車両搭載用発電装置においては、望ましくは、前記エンジン制御部は、前記発電電力要求値の変化に基づいて前記エンジンの始動制御または停止制御を行う。
【0012】
また、本発明に係る車両搭載用発電装置においては、望ましくは、前記エンジン制御部は、前記発電電力要求値が第1閾値から増加して第2閾値に達したときに前記エンジンの始動制御を行い、その後、前記発電電力要求値が前記第2閾値から減少し前記第1閾値に達したときに前記エンジンの停止制御を行う。
【0013】
また、本発明に係る車両搭載用発電装置においては、望ましくは、前記電圧制御部は、前記二次電池の充電状態に応じて前記電力経路の第1目標値を決定し、前記車両駆動部の動作に応じて前記電力経路電圧の第2目標値を決定する電圧目標値決定手段を備え、前記第2目標値が前記第1目標値を超えるときに、前記電力経路電圧を前記第2目標値に調整する。
【0014】
また、本発明は、エンジンと、前記エンジンを制御するエンジン制御部と、前記エンジンとの間でトルクを作用し合うジェネレータと、前記ジェネレータの交流発電電力を直流電力に変換し、車両を電力駆動する車両駆動部に至る電力経路にその直流電力を出力する整流回路と、前記整流回路と前記車両駆動部との間の電力経路に、二次電池の出力電圧を調整した電力経路電圧を出力すると共に、前記電力経路と前記二次電池との間で電力を伝達するコンバータ回路と、前記二次電池の充電状態に基づいて前記ジェネレータに対する発電電力要求値を決定する発電電力要求値決定部と、前記二次電池の充電状態に応じて前記電力経路電圧の第1目標値を決定し、前記車両駆動部の動作に応じて前記電力経路電圧の第2目標値を決定する電圧目標値決定部と、備え、前記エンジン制御部は、前記電力経路電圧を前記第1目標値に一致させ、さらに、前記ジェネレータの発電電力を前記発電電力要求値に一致させた場合の前記エンジンおよび前記ジェネレータにおける第1発電効率と、前記電力経路電圧を前記第2目標値に一致させ、さらに、前記ジェネレータの発電電力を前記発電電力要求値に一致させた場合の前記エンジンおよび前記ジェネレータにおける第2発電効率と、の差異に応じて前記エンジンを制御する、ことを特徴とする。
【0015】
また、本発明に係る車両搭載用発電装置においては、望ましくは、前記エンジン制御部は、前記第1発電効率から前記第2発電効率を減じた減算値が所定の閾値を超えるときに、前記エンジンを停止させ、前記減算値が前記所定の閾値以下であるときに、前記エンジンを駆動させる。
【0016】
また、本発明に係る車両搭載用発電装置においては、望ましくは、前記コンバータ回路を制御し、前記第2目標値が前記第1目標値を超えるときに、前記電力経路電圧を前記第2目標値に調整する電圧制御部、を備える。
【発明の効果】
【0017】
本発明によれば、エンジンによってジェネレータを駆動して発電を行う車両搭載用発電装置におけるエネルギー損失を抑制することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態に係るシリーズハイブリッド車両駆動システムの構成を示す図である。
【図2】シリーズハイブリッド車両駆動システムの回路構成例を示す図である。
【図3】発電制御のフローチャートである。
【図4】モータジェネレータMG1の回転数対トルク特性を示す図である。
【図5】要求電力依存・間欠制御のフローチャートである。
【図6】駆動電力Pv、二次電池18のSOC、充電要求電力Pbおよび発電電力要求値Pの時間変化を示す図である。
【図7】発電効率依存・間欠制御のフローチャートである。
【図8】モータジェネレータMG1の回転数対トルク特性を示す図である。
【図9】シリーズハイブリッド車両駆動システムの構成を示す図である。
【発明を実施するための形態】
【0019】
1.シリーズハイブリッド車両駆動システムについての概要
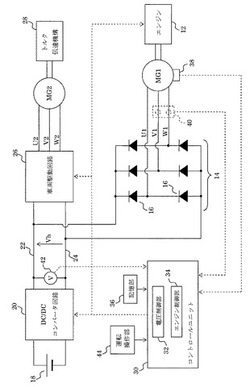
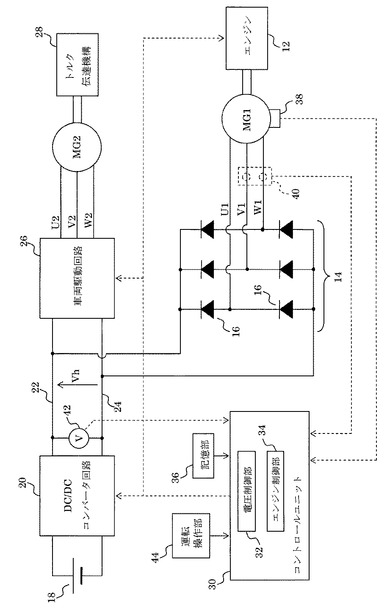
図1には本発明の実施形態に係るシリーズハイブリッド車両駆動システムの構成が示されている。このシステムは、モータジェネレータMG2を走行用のモータジェネレータとし、モータジェネレータMG1を発電用のモータジェネレータとするものである。シリーズハイブリッド車両駆動システムが備える構成要素のうち、エンジン12、モータジェネレータMG1、整流回路14、DC/DCコンバータ回路20およびコントロールユニット30は、車両搭載用の発電装置としての機能を有する。
【0020】
モータジェネレータMG1による発電電力は、二次電池18またはモータジェネレータMG2に供給される。モータジェネレータMG2は、二次電池18に充電された電力またはモータジェネレータMG1の発電電力によって車両を駆動する。
【0021】
エンジン12は、モータジェネレータMG1にトルクを与える。モータジェネレータMG1は、エンジン12からトルクを与えられることで発電を行う。整流回路14は、モータジェネレータMG1が発電した交流電力を直流電力に変換し、その直流電力をDC/DCコンバータ回路20または車両駆動回路26に出力する。
【0022】
DC/DCコンバータ回路20は、二次電池18の出力電圧を昇圧し、昇圧して得られた昇圧電圧Vhを整流回路14および車両駆動回路26に出力する。DC/DCコンバータ回路20が昇圧電圧Vhを変化させることで、整流回路14から二次電池18に供給される電力、整流回路14から車両駆動回路26に供給される電力、および二次電池18と車両駆動回路26との間で授受される電力が調整され得る。すなわち、昇圧電圧Vhは、これらの電力を調整するための制御用電圧となり得る。
【0023】
車両駆動回路26は、車両を加速するときは、整流回路14から出力される直流電力、またはDC/DCコンバータ回路20から出力される直流電力を交流電力に変換し、その交流電力をモータジェネレータMG2に供給する。そして、車両を回生制動するときは、モータジェネレータMG2の交流発電電力を直流電力に変換し、その直流電力をDC/DCコンバータ回路20に出力する。DC/DCコンバータ回路20は、車両駆動回路26から出力された電力によって二次電池18を充電する。
【0024】
コントロールユニット30は、アクセルペダル、ブレーキペダル、運転席の操作パネル等を含む運転操作部44における操作に基づいて、エンジン12、DC/DCコンバータ回路20、および車両駆動回路26を制御する。
【0025】
2.シリーズハイブリッド車両駆動システムの構成および動作
シリーズハイブリッド車両駆動システムの具体的な構成および動作について説明する。コントロールユニット30は、エンジン制御部34を備え、エンジン12のスロットルを制御することで、エンジン12のトルクおよび回転数を制御する。スロットルの開度が大きい程、エンジン12の出力パワー(トルクと回転数との積に比例する量)は増加し、スロットルの開度が小さい程、エンジン12の出力パワーは減少する。また、エンジン制御部34は、エンジン12に取り付けられたセルモータの制御、およびエンジンプラグの制御を行い、エンジン12の始動制御および停止制御を行う。
【0026】
モータジェネレータMG1のシャフトは、エンジン12のシャフトに取り付けられている。エンジン12およびモータジェネレータMG1は互いにトルクを作用し合う。すなわち、エンジン12は出力パワーに応じた駆動トルクをモータジェネレータMG1に与え、モータジェネレータMG1は、発電電力に応じたトルクをエンジン12に与える。
【0027】
モータジェネレータMG1の電力伝送線U1、V1およびW1は、整流回路14に接続されている。整流回路14は、整流素子として6個のダイオード16を備える。整流回路14には、上下のダイオード16の組が、電力伝送線U1,V1およびW1に対応して設けられている。上下のダイオード16の組においては、上側のダイオード16のアノード端子が下側のダイオード16のカソード端子に接続されている。また、各組の上側のダイオード16のカソード端子は、DC/DCコンバータ回路20と車両駆動回路26とを接続する正極伝送線22に接続され、各組の下側のダイオード16のアノード端子はDC/DCコンバータ回路20と車両駆動回路26とを接続する負極伝送線24に接続されている。
【0028】
各ダイオード16は、アノード端子の電位がカソード端子の電位よりも高いときに導通する。これによって、整流回路14は、3相交流電力を直流電力に変換する。すなわち、整流回路14は、各ダイオード16の整流作用により、電力伝送線U1、V1およびW1の相互間の交流電圧を直流電圧に変換し、正極伝送線22および負極伝送線24に出力する。
【0029】
DC/DCコンバータ回路20には二次電池18の正極および負極が接続されている。DC/DCコンバータ回路20は、二次電池18の出力電圧を昇圧し、昇圧電圧Vhを正極伝送線22および負極伝送線24との間に出力する。コントロールユニット30は、DC/DCコンバータ回路20を制御して昇圧電圧Vhを変化させる電圧制御部32を備え、DC/DCコンバータ回路20を制御する。
【0030】
正極伝送線22および負極伝送線24には車両駆動回路26が接続されている。また、車両駆動回路26には、モータジェネレータMG2の電力伝送線U2、V2およびW2が接続されている。車両駆動回路26は、正極伝送線22および負極伝送線24から与えられる直流電力を3相交流電力に変換し、その3相交流電力をモータジェネレータMG2に出力する。また、車両駆動回路26は、モータジェネレータMG2から与えられる3相交流電力を直流電力に変換し、その直流電力を正極伝送線22および負極伝送線24に出力する。車両駆動回路26が正極伝送線22および負極伝送線24側からモータジェネレータMG2に電力を供給するか、モータジェネレータMG2から正極伝送線22および負極伝送線24側に電力を供給するかは、正極伝送線22および負極伝送線24の線間電圧、モータジェネレータMG2の回転状態、DC/DCコンバータ回路20の動作状態、車両駆動回路26の動作状態等によって決定される。
【0031】
モータジェネレータMG2のシャフトには、車輪にトルクを伝達するトルク伝達機構28が取り付けられている。車両を加速するときは、車両駆動回路26からモータジェネレータMG2に電力が供給される。これによって、モータジェネレータMG2は加速トルクを発生し、車両を加速する。また、車両を回生制動するときは、モータジェネレータMG2から車両駆動回路26に発電電力が供給される。これによって、モータジェネレータMG2は制動トルクを発生し、車両を制動する。
【0032】
コントロールユニット30は、モータジェネレータMG1に設けられたレゾルバ38から、モータジェネレータMG1の回転数の検出値を読み込む。また、コントロールユニット30は、モータジェネレータMG1の電力伝送線V1およびW1の各電流を検出する電流センサ40から、電力伝送線V1およびW1の各電流検出値を読み込み、さらに、昇圧電圧Vhを検出する電圧計42から検出値を読み込む。そして、回転数の検出値、電力伝送線V1およびW1の電流検出値、ならびに昇圧電圧Vhの検出値に基づいてモータジェネレータMG1のトルクを求める。また、コントロールユニット30は、電力伝送線V1およびW1の電流検出値と、昇圧電圧Vhの検出値とに基づいてモータジェネレータMG1の発電電力を求める。コントロールユニット30は、回転数の検出値、求められたモータジェネレータMG1のトルクおよび発電電力を、モータジェネレータMG1の発電制御に用いる。
【0033】
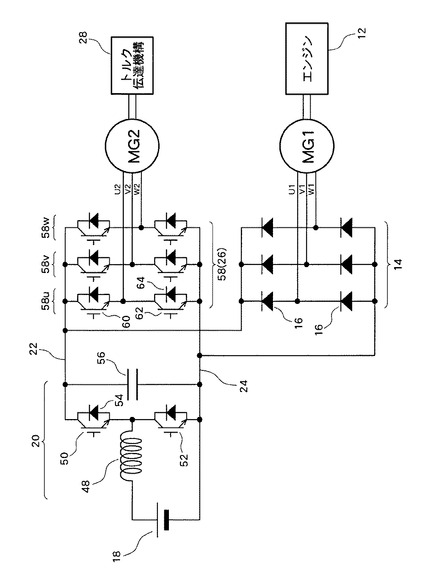
図2には、シリーズハイブリッド車両駆動システムの回路構成例が示されている。図1に示される構成要素と同一の構成要素については同一の符号を付してその説明を省略する。DC/DCコンバータ回路20は、インダクタ48、第1IGBT(Insulated Gate Bipolar Transistor)50、第2IGBT52、ダイオード54、および出力コンデンサ56を備える。ここで、IGBTの代わりに、サイリスタ、トライアック、バイポーラトランジスタ、電界効果トランジスタ等のその他の半導体素子を用いてもよい。
【0034】
インダクタ48の一端は二次電池18の正極に接続されている。インダクタ48の他端は、第1IGBT50のエミッタ端子、および第2IGBT52のコレクタ端子に接続されている。第1IGBT50のコレクタ端子は正極伝送線22に接続され、第2IGBT52のエミッタ端子は負極伝送線24に接続されている。第1IGBT50および第2IGBT52のそれぞれのコレクタ端子とエミッタ端子との間には、エミッタ端子側がアノード端子となるようダイオード54が接続されている。正極伝送線22と負極伝送線24との間には出力コンデンサ56が接続されている。
【0035】
第1IGBT50および第2IGBT52に対しては、コントロールユニット30によって、電圧目標値に応じたデューティ比を以て交互にスイッチングが行われる。これによって、インダクタ48にはデューティ比に応じた誘導起電力が発生する。そして、二次電池18の出力電圧に誘導起電力を加えた電圧が昇圧電圧Vhとして出力コンデンサ56に充電され、正極伝送線22および負極伝送線24に昇圧電圧Vhが出力される。
【0036】
車両駆動回路26は、インバータ回路58によって構成されている。インバータ回路58は、それぞれが上側IGBT60および下側IGBT62を含む3組のIGBT組58u、58vおよび58wを備える。各IGBT組における上側IGBT60のエミッタ端子は同じ組の下側IGBT62のコレクタ端子に接続されている。また、各IGBTのコレクタ端子とエミッタ端子との間には、エミッタ端子側がアノード端子となるようダイオード64が接続されている。
【0037】
各IGBT組の上側IGBT60のコレクタ端子は共通に接続され正極伝送線22に接続されている。また、各IGBT組の下側IGBT62のエミッタ端子は共通に接続され負極伝送線24に接続されている。
【0038】
IGBT組58uの上側IGBT60と下側IGBT62の接続節点には、モータジェネレータMG2の電力伝送線U2が接続されている。また、IGBT組58vの上側IGBT60と下側IGBT62の接続節点には、モータジェネレータMG2の電力伝送線V2が接続され、IGBT組58wの上側IGBT60と下側IGBT62の接続節点には、MG2の電力伝送線W2が接続されている。
【0039】
ここでは、インバータ回路58のスイッチング素子としてIGBTを用いた例を示しているが、スイッチング素子としては、サイリスタ、トライアック、バイポーラトランジスタ、電界効果トランジスタ等のその他の半導体素子を用いてもよい。
【0040】
コントロールユニット30は、各IGBT組が備える上側IGBT60および下側IGBT62に対しスイッチング制御を行う。インバータ回路58は、このスイッチング制御によって、DC/DCコンバータ回路20および整流回路14と、モータジェネレータMG2との間で直流交流変換を行うと共に、モータジェネレータMG2との間で授受される電力を調整する。
【0041】
3.シリーズハイブリッド車両駆動システムにおける発電制御
(1)制御の概要
シリーズハイブリッド車両駆動システムは、発電の際のエネルギー損失を抑制するという観点から求められた第1電圧目標値、およびユーザの運転操作に応じた走行制御を実行するという観点から求められた第2電圧目標値のうち、値が大きい方に昇圧電圧Vhを一致させる制御を実行する。
【0042】
すなわち、コントロールユニット30は、エネルギー損失を抑制するという条件(エンジン12について最適燃費条件が満たされるという条件)の下、モータジェネレータMG1に対する発電電力要求値に基づいて、昇圧電圧Vhに対する仮の目標値として第1電圧目標値を求める。さらに、モータジェネレータMG2の駆動制御に応じて、昇圧電圧Vhに対する仮の目標値として第2電圧目標値を求める。そして、第2電圧目標値が第1電圧目標値より大きいときは、コントロールユニット30は、昇圧電圧Vhが第2電圧目標値となるようDC/DCコンバータ回路20を制御する。他方、第2電圧目標値が第1電圧目標値以下であるときは、コントロールユニット30は、昇圧電圧Vhが第1電圧目標値となるようDC/DCコンバータ回路20を制御する。これによって、モータジェネレータMG1による発電電力を低エネルギー損失の条件下で確保すると共に、ユーザの運転操作に応じた走行制御を実行することができる。
【0043】
ここで、昇圧電圧Vhが第2電圧目標値となるようDC/DCコンバータ回路20を制御した場合には、発電の際のエネルギー損失が増大することがある。そこで、本実施形態に係るシリーズハイブリッド車両駆動システムにおいては間欠発電制御が行われる。間欠発電制御は、エンジン12の始動および停止の繰り返しにより、間欠的にモータジェネレータMG1を駆動する制御である。
【0044】
間欠発電制御には、要求電力依存・間欠制御および発電効率依存・間欠制御がある。要求電力依存・間欠制御は、モータジェネレータMG1に対する発電電力要求値の変化に基づいて、エンジン12の始動および停止を行う制御である。発電効率依存・間欠制御は、モータジェネレータMG2の駆動制御に伴って予測される発電効率に基づいて、エンジン12の始動および停止を行う制御である。
【0045】
(2)発電制御の具体例
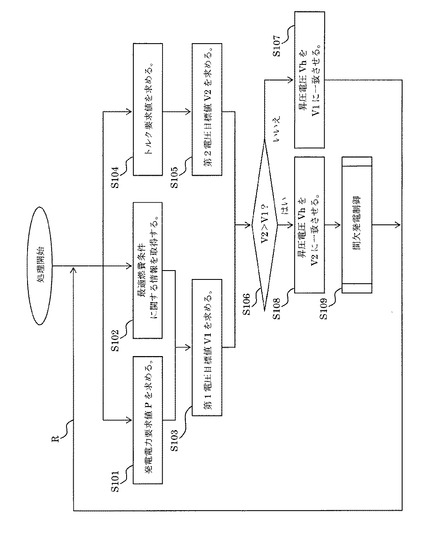
図3には、発電制御のフローチャートが示されている。コントロールユニット30は、運転操作部44における操作、走行状態、二次電池18の充電状態等に関する車両動作情報に基づいて二次電池18の充電要求電力Pbを求める。そして、充電要求電力Pbに基づいてモータジェネレータMG1の発電電力要求値Pを求める(S101)。コントロールユニット30は、記憶部36に予め記憶されているエンジン12の最適燃費条件に関する情報を取得し(S102)、エンジン12について最適燃費条件が満たされるという条件の下、発電電力要求値Pに基づいて第1電圧目標値V1を求める(S103)。具体的には、コントロールユニット30は、モータジェネレータMG1の回転数対トルク特性に基づいて、次のように第1電圧目標値V1を決定する。
【0046】
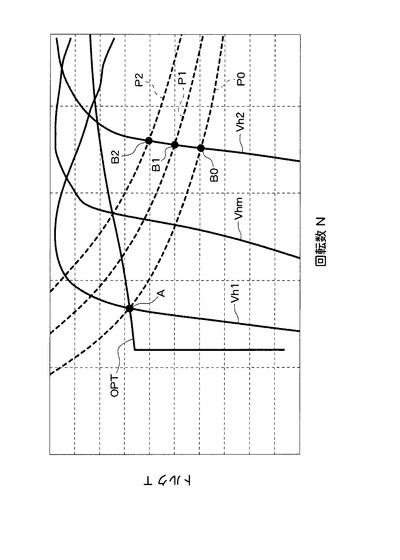
図4には、モータジェネレータMG1の回転数対トルク特性が示されている。この回転数対トルク特性は、予め記憶部36に記憶され、モータジェネレータMG1の制御においてコントロールユニット30によって参照される。横軸は回転数Nを示し、縦軸はモータジェネレータMG1からエンジン12に与えられるトルクTを示す。図4には、昇圧電圧をVh1、Vhm、およびVh2で一定にした場合のそれぞれにつき、回転数NとトルクTとの関係がNT特性曲線Vh1、Vhm、およびVh2として示されている。ここで、昇圧電圧Vh1、Vhm、およびVh2には、Vh1<Vhm<Vh2の関係がある。また、図4には、エンジン12の最適燃費条件が成立するトルクTおよび回転数Nを示す曲線が、最適燃費線OPTとして示されている。さらに、図4には、発電電力がP0、P1およびP2であることを示す等電力線P0、P1およびP2がそれぞれ示されている。発電電力要求値PをP0とした場合、最適燃費線OPTと等電力線P0との交点Aを通るNT特性曲線Vh1に対応する昇圧電圧Vh1が、第1電圧目標値V1として求められる。
【0047】
次に、コントロールユニット30は、運転操作部44における操作、走行状態等に基づいてモータジェネレータMG2のトルク要求値を求める(S104)。そして、トルク要求値に基づいて、昇圧電圧Vhに対する仮の目標値として、第2電圧目標値V2を求める(S105)。
【0048】
コントロールユニット30は、第2電圧目標値V2が第1電圧目標値V1より大きいか否かを判定する(S106)。そして、第2電圧目標値V2が第1電圧目標値V1以下であるときは、昇圧電圧Vhを第1電圧目標値V1に一致させる(S107)。ここで、本願明細書における「一致」とは、2つの値の差異が所定の誤差範囲内であることをいうものとする。これによって、図4におけるNT平面上の動作点は点Aとなる。エンジン12は、最適燃費条件が成立する状態でモータジェネレータMG1にトルクを与え、モータジェネレータMG1は発電電力要求値P0の電力を発電する。
【0049】
コントロールユニット30は、第2電圧目標値V2が第1電圧目標値V1より大きいときは、昇圧電圧Vhを第2電圧目標値V2に一致させる(S108)。ここで、Vh2=V2であるものとすると、図4におけるNT平面上の動作点は点Aから、第2電圧目標値V2に対応するNT特性曲線Vh2と等電力線P0との交点B0に至る。その後、コントロールユニット30は、昇圧電圧Vhを第2電圧目標値V2に一致させた状態で、エンジン12およびモータジェネレータMG1に対し、間欠発電制御(S109)として、要求電力依存・間欠制御を実行する。
【0050】
(3)要求電力依存・間欠制御
要求電力依存・間欠制御は、モータジェネレータMG2の制御を優先させて昇圧電圧Vhが調整されるという条件の下、モータジェネレータMG1に対する発電電力要求値の変化に基づいて、エンジン12の始動および停止を行う制御である。
【0051】
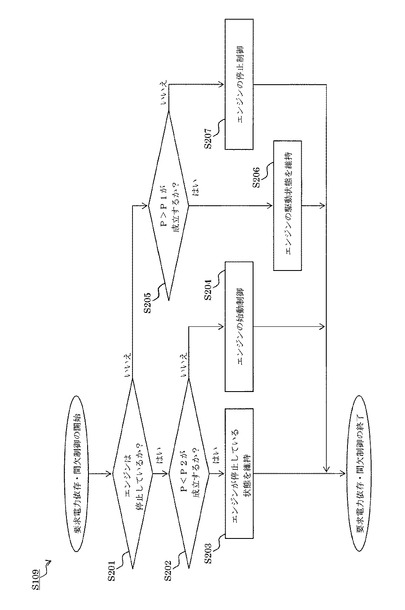
図5には、ステップS109で実行される間欠発電制御として要求電力依存・間欠制御のフローチャートが示されている。この制御においては、発電電力要求値Pに対する閾値として、P0より大きい第1閾値P1、および、第1閾値P1より大きい第2閾値P2が予め定められる。
【0052】
コントロールユニット30は、現時点においてエンジン12が停止しているか否かを認識する(S201)。そして、エンジン12が停止していると認識したときは、発電電力要求値Pが第2閾値P2未満であるか否かを判定する(S202)。コントロールユニット30は、発電電力要求値Pが第2閾値P2未満であるときは、エンジン12が停止している状態を維持する(S203)。一方、発電電力要求値Pが第2閾値P2以上であるときは、エンジン12の始動制御を実行する(S204)。
【0053】
コントロールユニット30は、エンジン12が駆動状態にあると認識したときは、発電電力要求値Pが第1閾値P1を超えるか否かを判定する(S205)。そして、発電電力要求値Pが第1閾値P1を超えるときは、エンジン12の駆動状態を維持する(S206)。一方、発電電力要求値Pが第1閾値P1以下であるときは、コントロールユニット30は、エンジン12の停止制御を実行する(S207)。コントロールユニット30は、このような要求電力依存・間欠制御を実行した後、図3のステップS101、ステップS102、およびステップS104に戻る(R)。
【0054】
このような処理によれば、第2電圧目標値V2が第1電圧目標値V1よりも大きい場合には、ステップS106の判定に基づき、ステップS108およびS109が繰り返し実行される(R)。これによって、コントロールユニット30は次のような処理を実行する。すなわち、コントロールユニット30は、発電電力要求値Pが、第1閾値P1から増加して第2閾値P2に達したときにエンジン12の始動制御を実行し、その後、発電電力要求値Pが第2閾値P2から減少し第1閾値P1に達したときにエンジン12の停止制御を実行する。
【0055】
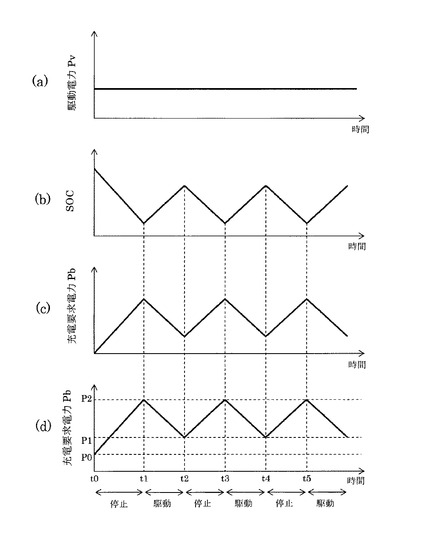
図6(a)〜(d)には、それぞれ、(a)車両駆動回路26からモータジェネレータMG2に供給される駆動電力Pv、(b)二次電池18のSOC(State Of Charge)、(c)充電要求電力Pb、および(d)発電電力要求値Pの時間変化が示されている。ここでは、モータジェネレータMG2に対するトルク要求値が一定であり、図6(a)に示されるように駆動電力Pvもまた一定であるものとする。また、第1電圧目標値V1<第2電圧目標値V2の関係が成立しているものとする。
【0056】
図6(d)に示されるように、図3のステップS108から間欠発電制御(S109)に移行した初期時刻t0において、発電電力要求値PはP0である。発電電力要求値P0は、第1閾値P1より小さいため、コントロールユニット30はエンジン12を停止した状態を維持する。
【0057】
図6に示される動作例では駆動電力Pvが一定であるため、二次電池18に充電された電力は、車両の走行によって消費される。時刻t0においてエンジン12は停止しており、モータジェネレータMG1による発電が行われないため、SOCは時間の経過と共に減少する。これによって、初期時刻t0以降、充電要求電力Pbおよび発電電力要求値Pは増加する。
【0058】
発電電力要求値Pが、時刻t1において第2閾値P2に達すると、コントロールユニット30は、エンジン12の始動制御を行う。これによって、モータジェネレータMG1による発電が行われ、SOCは時間の経過と共に増加し、充電要求電力Pbおよび発電電力要求値Pは時間の経過と共に減少する。
【0059】
発電電力要求値Pが、時刻t2において第1閾値P1に達すると、コントロールユニット30は、エンジン12の停止制御を行う。これによって、モータジェネレータMG1による発電が停止し、SOCは時間の経過と共に減少し、充電要求電力Pbおよび発電電力要求値Pは時間の経過と共に増加する。
【0060】
発電電力要求値Pが、時刻t3において第2閾値P2に達すると、コントロールユニット30は、エンジン12の始動制御を行う。これによって、モータジェネレータMG1による発電が行われ、SOCは時間の経過と共に増加し、充電要求電力Pbおよび発電電力要求値Pは時間の経過と共に減少する。このように、時刻t0〜t1の時間、時刻t1〜t2の時間、時刻t2〜t3の時間、・・・・・で、エンジン12は、停止状態および駆動状態を繰り返す。発電電力要求値Pが第1閾値P1に達したときは、動作点は図4の点B1となり、発電電力要求値Pが第2閾値P2に達したときは、動作点は図4の点B2となる。ここで、点B1は、等電力線P1とNT特性曲線Vh2との交点であり、点B2は、等電力線P2とNT特性曲線Vh2との交点である。
【0061】
このような制御によれば、第2電圧目標値V2が第1電圧目標値V1以下であるときは、昇圧電圧Vhを第1電圧目標値V1と一致させる制御が実行され、第2電圧目標値V2が第1電圧目標値V1よりも大きいときは、昇圧電圧Vhを第2電圧目標値V2と一致させる制御が実行される。これによって、モータジェネレータMG1による発電電力を低エネルギー損失の条件下で確保すると共に、ユーザの運転操作に応じた走行制御を実行することができる。
【0062】
さらに、昇圧電圧Vhを第2電圧目標値V2と一致させる制御が実行された場合には、要求電力依存・間欠発電制御が実行される。一般に、エンジン12およびモータジェネレータMG1におけるエネルギー損失は、動作点を最適燃費線OPT上に設定することで小さくなる。しかし、昇圧電圧Vhを第2電圧目標値V2と一致させる制御が実行された場合には、最適燃費線OPT上に動作点を設定することが困難となり、エネルギー損失を抑制することが困難となる。そこで、本実施形態に係る要求電力依存・間欠制御においては、エンジン12およびモータジェネレータMG1を間欠的に停止し、エネルギー損失を抑制する。
【0063】
(4)発電効率依存・間欠制御
発電効率依存・間欠制御は、モータジェネレータMG2の制御を優先させて昇圧電圧Vhが調整されるという条件の下、モータジェネレータMG2の駆動制御に伴って予測される発電効率に基づいて、エンジン12の始動および停止を行う制御である。具体的には、昇圧電圧Vhを第1電圧目標値V1に一致させ、さらに、発電電力を発電電力要求値Pに一致させた場合の第1発電効率を求め、昇圧電圧Vhを第2電圧目標値V2に一致させ、さらに発電電力を発電電力要求値Pに一致させた場合の第2発電効率を求める。そして、第1発電効率と第2発電効率との差異に応じて間欠発電制御を行う。発電効率は、例えば、エンジン12に供給された燃料を仕事率(単位はJ/s)に換算した値に対する、発電電力(単位はJ/s)の比率として定義される。
【0064】
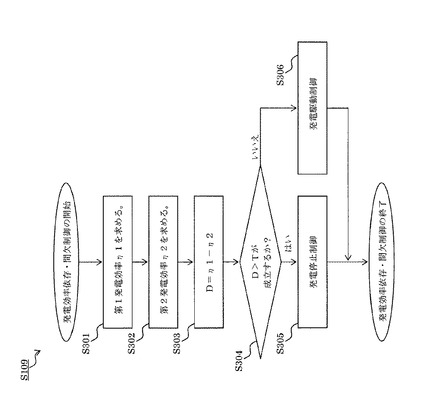
図7には、ステップS109で実行される間欠発電制御として発電効率依存・間欠制御のフローチャートが示されている。コントロールユニット30は、昇圧電圧Vhを第1電圧目標値V1に一致させ、さらに、発電電力を発電電力要求値Pに一致させた場合の第1発電効率η1を求める(S301)。また、コントロールユニット30は、昇圧電圧Vhを第2電圧目標値V2に一致させ、さらに、発電電力を発電電力要求値Pに一致させた場合の第2発電効率η2を求める(S302)。これらの処理は、記憶部36に記憶されている発電効率マップを参照することで行われる。発電効率マップは、昇圧電圧Vhと、モータジェネレータMG1による発電電力と、エンジン12およびモータジェネレータMG1における発電効率とを対応付けたものである。発電効率マップは、シミュレーション、実験等によって作成され記憶部36に記憶されている。
【0065】
コントロールユニット30は、第1発電効率η1から第2発電効率η2を減算した判定値Dを求める(S303)。そして、判定値Dが判定閾値Tよりも大きいか否かを判定する(S304)。コントロールユニット30は、判定値Dが判定閾値Tよりも大きい場合には、発電停止制御を実行する(S305)。ここで発電停止制御は、エンジン12が駆動状態にあるときはエンジン12を停止させ、エンジン12が停止した状態にあるときはその状態を維持する制御である。一方、判定値Dが判定閾値T以下であるときは、コントロールユニット30は、発電駆動制御を実行する(S306)。ここで発電駆動制御は、エンジン12が停止した状態にあるときはエンジン12を始動し、エンジン12が駆動状態にあるときはその状態を維持する制御である。コントロールユニット30は、このような発電効率依存・間欠制御を実行した後、図3のステップS101、ステップS102、およびステップS104に戻る(R)。
【0066】
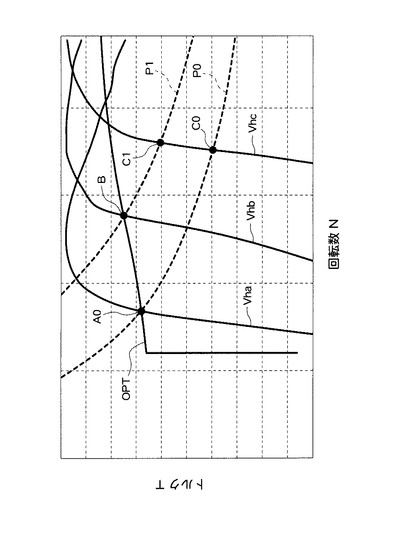
発電効率依存・間欠制御によれば、昇圧電圧Vhを第2電圧目標値V2と一致させる制御が実行された場合において、次のような原理に基づいてエネルギー損失を抑制することができる。図8には、モータジェネレータMG1の回転数対トルク特性が示されている。図4に示されている事項と同一の事項については同一の符号を付する。図8には、昇圧電圧をVha、Vhb、およびVhcで一定にした場合のそれぞれにつき、回転数NとトルクTとの関係がNT特性曲線Vha、Vhb、およびVhcとして示されている。昇圧電圧Vha、Vhb、およびVhcには、Vha<Vhb<Vhcの関係がある。
【0067】
ここで、図3のフローチャートにおける最初の間欠発電制御(S109)において、発電電力要求値PがP0、第1電圧目標値V1がVha、第2電圧目標値V2がVhcであったものとする。このとき、第1発電効率η1は動作点A0に対して求められ、第2発電効率η2は動作点C0に対して求められる。ここで、動作点A0は、等電力線P0と最適燃費線OPTとの交点であり、動作点C0は、等電力線P0とNT特性曲線Vhcとの交点である。
【0068】
動作点A0および動作点C0における発電効率を、それぞれη1(A0)およびη2(C0)とすると、判定値Dは、D=η1(A0)−η2(C0)である。この判定値Dが判定閾値Tよりも大きい場合には、コントロールユニット30は、発電停止制御を実行し、判定値Dが判定閾値T以下である場合には、コントロールユニット30は、発電駆動制御を実行する。
【0069】
次に、繰り返し経路Rを経た第2回目の間欠発電制御(S109)において、発電電力要求値PがP1、第1電圧目標値V1がVhb、第2電圧目標値V2がVhcであったものとする。このとき、第1発電効率η1は、動作点Bに対して求められ、第2発電効率η2は、動作点C1に対して求められる。ここで、動作点Bは、等電力線P1と最適燃費線OPTとの交点であり、動作点C1は、等電力線P1とNT特性曲線Vhcとの交点である。動作点Bおよび動作点C1における発電効率を、それぞれη1(B)およびη2(C1)とすると、判定値Dは、D=η1(B)−η2(C1)である。この判定値Dが判定閾値Tよりも大きい場合には、コントロールユニット30は、発電停止制御を実行し、判定値Dが判定閾値T以下である場合には、コントロールユニット30は、発電駆動制御を実行する。
【0070】
判定値Dは、最適燃費線OPTから離れてエンジン12およびモータジェネレータMG1を動作させた場合における、発電効率の低下の度合いを示す値である。判定値Dが大きい程、エンジン12およびモータジェネレータMG1におけるエネルギー損失は大きくなる。
【0071】
図8に示される例では、最初の判定値D=η1(A1)−η2(C0)は、第2回目の判定値D=η1(B)−η2(C1)よりも大きい。ここで、判定閾値Tが、第2回目の判定値D=η1(B)−η2(C1)以上の値、かつ、最初の判定値D=η1(A1)−η2(C0)よりも小さい値として設定されている場合には、最初の間欠発電制御では発電停止制御が実行され、第2回目の間欠発電制御では、発電駆動制御が実行されることとなる。これによって、最適燃費線OPTから大きく離れることが予測される最初の間欠発電制御においては、発電停止制御を実行し、エネルギー損失を抑制することができる。
【0072】
判定閾値Tは、最適燃費線OPTから離れてエンジン12およびモータジェネレータMG1を動作させる場合において、発電効率に対して許容され得る最大の低下を鑑みて、実験、シミュレーション等に基づいて決定すればよい。
【符号の説明】
【0073】
12 エンジン、14 整流回路、16,54,64 ダイオード、18 二次電池、20 DC/DCコンバータ回路、22 正極伝送線、24 負極伝送線、26 車両駆動回路、28 トルク伝達機構、30 コントロールユニット、32 電圧制御部、34 エンジン制御部、36 記憶部、38 レゾルバ、40 電流センサ、42 電圧計、44 運転操作部、48 インダクタ、50 第1IGBT、52 第2IGBT、56 出力コンデンサ、58 インバータ回路、58u,58v,58w IGBT組、60 上側IGBT、62 下側IGBT、G ジェネレータ、M 走行用モータ。
【技術分野】
【0001】
本発明は、車両搭載用発電装置に関し、特に、エンジンによってジェネレータを駆動して発電を行う装置の改良に関する。
【背景技術】
【0002】
シリーズハイブリッド自動車につき広く研究開発が行われている。シリーズハイブリッド自動車は、エンジンによってジェネレータを駆動して発電を行い、発電電力によって走行用モータを駆動して車両を走行させる。ジェネレータによる発電電力のうち車両の走行に用いられない電力、および走行用モータによる回生電力は、繰り返して充放電が可能な二次電池に供給される。二次電池に充電された電力は、走行制御に応じて走行用モータに供給され、走行電力として用いられる。シリーズハイブリッド自動車によれば、エンジンによる発電電力および回生電力を走行電力として用いることができる。
【0003】
図9には、シリーズハイブリッド自動車に搭載される車両駆動システムが示されている。このシリーズハイブリッド車両駆動システムは、二次電池18、DC/DCコンバータ回路20、車両駆動回路26、走行用モータM、エンジン12、ジェネレータG、整流回路14およびコントロールユニット30を備える。
【0004】
エンジン12は、ジェネレータGにトルクを与え、ジェネレータGはそのトルクによって発電を行う。整流回路14は、ジェネレータGの交流発電電力を直流電力に変換し、車両駆動回路26に至る電力経路にその直流電力を出力する。DC/DCコンバータ回路20は、二次電池18の出力電圧を昇圧し、整流回路14と車両駆動回路26との間の電力経路に昇圧後の電圧Vhを出力する。コントロールユニット30は、エンジン12、車両駆動回路26およびDC/DCコンバータ回路20を制御する。
【0005】
特許文献1には、シリーズハイブリッド自動車について記載されている。このシリーズハイブリッド自動車においては、ジェネレータが出力する交流発電電圧を整流する整流器が設けられている。整流器が出力する直流電圧は、昇圧チョッパ回路によって電圧値が調整された後、二次電池(バッテリ)に印加される。特許文献1には、さらに、昇圧チョッパ回路の制御によりバッテリの電圧制御を行う旨が記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平6−245322号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
図9に示されるシリーズハイブリッド車両駆動システムには、コントロールユニット30が、次のような制御を実行するものがある。すなわち、コントロールユニット30は、ジェネレータGに対する発電電力要求値に基づいて、DC/DCコンバータ回路20から出力される昇圧電圧Vhに対する仮の目標値として第1電圧目標値を求める。さらに、走行用モータMの制御に応じて、DC/DCコンバータ回路20から出力される昇圧電圧に対する仮の目標値として第2電圧目標値を求める。そして、第2電圧目標値が第1電圧目標値より大きいときは、ユーザの運転操作に応じた走行制御を確保するため、コントロールユニット30は、昇圧電圧Vhが第2電圧目標値となるようDC/DCコンバータ回路20を制御する。他方、第2電圧目標値が第1電圧目標値以下であるときは、整流回路14に流れる電流を抑制するため、コントロールユニット30は、昇圧電圧Vhが第1電圧目標値となるようDC/DCコンバータ回路20を制御する。
【0008】
しかし、DC/DCコンバータ回路20の昇圧電圧Vhを、ただ単に第1電圧目標値または第2電圧目標値のいずれか一方に設定したのでは、シリーズハイブリッド車両駆動システムにおけるエネルギー損失を抑制することが困難となる場合があった。
【0009】
本発明は、エンジンによってジェネレータを駆動して発電を行う車両搭載用発電装置におけるエネルギー損失を抑制することを目的とする。
【課題を解決するための手段】
【0010】
本発明は、エンジンと、前記エンジンを制御するエンジン制御部と、前記エンジンとの間でトルクを作用し合うジェネレータと、前記ジェネレータの交流発電電力を直流電力に変換し、車両を電力駆動する車両駆動部に至る電力経路にその直流電力を出力する整流回路と、前記整流回路と前記車両駆動部との間の電力経路に、二次電池の出力電圧を調整した電力経路電圧を出力すると共に、前記電力経路と前記二次電池との間で電力を伝達するコンバータ回路と、前記コンバータ回路を制御し、前記電力経路電圧を調整する電圧制御部と、前記二次電池の充電状態に基づいて前記ジェネレータに対する発電電力要求値を決定する発電電力要求値決定部と、を備え、前記電圧制御部は、前記車両駆動部の動作に応じて前記電力経路電圧の目標値を決定し、前記電力経路電圧を前記目標値に調整し、前記エンジン制御部は、前記発電電力要求値に基づいて前記エンジンを制御する、ことを特徴とする。
【0011】
また、本発明に係る車両搭載用発電装置においては、望ましくは、前記エンジン制御部は、前記発電電力要求値の変化に基づいて前記エンジンの始動制御または停止制御を行う。
【0012】
また、本発明に係る車両搭載用発電装置においては、望ましくは、前記エンジン制御部は、前記発電電力要求値が第1閾値から増加して第2閾値に達したときに前記エンジンの始動制御を行い、その後、前記発電電力要求値が前記第2閾値から減少し前記第1閾値に達したときに前記エンジンの停止制御を行う。
【0013】
また、本発明に係る車両搭載用発電装置においては、望ましくは、前記電圧制御部は、前記二次電池の充電状態に応じて前記電力経路の第1目標値を決定し、前記車両駆動部の動作に応じて前記電力経路電圧の第2目標値を決定する電圧目標値決定手段を備え、前記第2目標値が前記第1目標値を超えるときに、前記電力経路電圧を前記第2目標値に調整する。
【0014】
また、本発明は、エンジンと、前記エンジンを制御するエンジン制御部と、前記エンジンとの間でトルクを作用し合うジェネレータと、前記ジェネレータの交流発電電力を直流電力に変換し、車両を電力駆動する車両駆動部に至る電力経路にその直流電力を出力する整流回路と、前記整流回路と前記車両駆動部との間の電力経路に、二次電池の出力電圧を調整した電力経路電圧を出力すると共に、前記電力経路と前記二次電池との間で電力を伝達するコンバータ回路と、前記二次電池の充電状態に基づいて前記ジェネレータに対する発電電力要求値を決定する発電電力要求値決定部と、前記二次電池の充電状態に応じて前記電力経路電圧の第1目標値を決定し、前記車両駆動部の動作に応じて前記電力経路電圧の第2目標値を決定する電圧目標値決定部と、備え、前記エンジン制御部は、前記電力経路電圧を前記第1目標値に一致させ、さらに、前記ジェネレータの発電電力を前記発電電力要求値に一致させた場合の前記エンジンおよび前記ジェネレータにおける第1発電効率と、前記電力経路電圧を前記第2目標値に一致させ、さらに、前記ジェネレータの発電電力を前記発電電力要求値に一致させた場合の前記エンジンおよび前記ジェネレータにおける第2発電効率と、の差異に応じて前記エンジンを制御する、ことを特徴とする。
【0015】
また、本発明に係る車両搭載用発電装置においては、望ましくは、前記エンジン制御部は、前記第1発電効率から前記第2発電効率を減じた減算値が所定の閾値を超えるときに、前記エンジンを停止させ、前記減算値が前記所定の閾値以下であるときに、前記エンジンを駆動させる。
【0016】
また、本発明に係る車両搭載用発電装置においては、望ましくは、前記コンバータ回路を制御し、前記第2目標値が前記第1目標値を超えるときに、前記電力経路電圧を前記第2目標値に調整する電圧制御部、を備える。
【発明の効果】
【0017】
本発明によれば、エンジンによってジェネレータを駆動して発電を行う車両搭載用発電装置におけるエネルギー損失を抑制することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態に係るシリーズハイブリッド車両駆動システムの構成を示す図である。
【図2】シリーズハイブリッド車両駆動システムの回路構成例を示す図である。
【図3】発電制御のフローチャートである。
【図4】モータジェネレータMG1の回転数対トルク特性を示す図である。
【図5】要求電力依存・間欠制御のフローチャートである。
【図6】駆動電力Pv、二次電池18のSOC、充電要求電力Pbおよび発電電力要求値Pの時間変化を示す図である。
【図7】発電効率依存・間欠制御のフローチャートである。
【図8】モータジェネレータMG1の回転数対トルク特性を示す図である。
【図9】シリーズハイブリッド車両駆動システムの構成を示す図である。
【発明を実施するための形態】
【0019】
1.シリーズハイブリッド車両駆動システムについての概要
図1には本発明の実施形態に係るシリーズハイブリッド車両駆動システムの構成が示されている。このシステムは、モータジェネレータMG2を走行用のモータジェネレータとし、モータジェネレータMG1を発電用のモータジェネレータとするものである。シリーズハイブリッド車両駆動システムが備える構成要素のうち、エンジン12、モータジェネレータMG1、整流回路14、DC/DCコンバータ回路20およびコントロールユニット30は、車両搭載用の発電装置としての機能を有する。
【0020】
モータジェネレータMG1による発電電力は、二次電池18またはモータジェネレータMG2に供給される。モータジェネレータMG2は、二次電池18に充電された電力またはモータジェネレータMG1の発電電力によって車両を駆動する。
【0021】
エンジン12は、モータジェネレータMG1にトルクを与える。モータジェネレータMG1は、エンジン12からトルクを与えられることで発電を行う。整流回路14は、モータジェネレータMG1が発電した交流電力を直流電力に変換し、その直流電力をDC/DCコンバータ回路20または車両駆動回路26に出力する。
【0022】
DC/DCコンバータ回路20は、二次電池18の出力電圧を昇圧し、昇圧して得られた昇圧電圧Vhを整流回路14および車両駆動回路26に出力する。DC/DCコンバータ回路20が昇圧電圧Vhを変化させることで、整流回路14から二次電池18に供給される電力、整流回路14から車両駆動回路26に供給される電力、および二次電池18と車両駆動回路26との間で授受される電力が調整され得る。すなわち、昇圧電圧Vhは、これらの電力を調整するための制御用電圧となり得る。
【0023】
車両駆動回路26は、車両を加速するときは、整流回路14から出力される直流電力、またはDC/DCコンバータ回路20から出力される直流電力を交流電力に変換し、その交流電力をモータジェネレータMG2に供給する。そして、車両を回生制動するときは、モータジェネレータMG2の交流発電電力を直流電力に変換し、その直流電力をDC/DCコンバータ回路20に出力する。DC/DCコンバータ回路20は、車両駆動回路26から出力された電力によって二次電池18を充電する。
【0024】
コントロールユニット30は、アクセルペダル、ブレーキペダル、運転席の操作パネル等を含む運転操作部44における操作に基づいて、エンジン12、DC/DCコンバータ回路20、および車両駆動回路26を制御する。
【0025】
2.シリーズハイブリッド車両駆動システムの構成および動作
シリーズハイブリッド車両駆動システムの具体的な構成および動作について説明する。コントロールユニット30は、エンジン制御部34を備え、エンジン12のスロットルを制御することで、エンジン12のトルクおよび回転数を制御する。スロットルの開度が大きい程、エンジン12の出力パワー(トルクと回転数との積に比例する量)は増加し、スロットルの開度が小さい程、エンジン12の出力パワーは減少する。また、エンジン制御部34は、エンジン12に取り付けられたセルモータの制御、およびエンジンプラグの制御を行い、エンジン12の始動制御および停止制御を行う。
【0026】
モータジェネレータMG1のシャフトは、エンジン12のシャフトに取り付けられている。エンジン12およびモータジェネレータMG1は互いにトルクを作用し合う。すなわち、エンジン12は出力パワーに応じた駆動トルクをモータジェネレータMG1に与え、モータジェネレータMG1は、発電電力に応じたトルクをエンジン12に与える。
【0027】
モータジェネレータMG1の電力伝送線U1、V1およびW1は、整流回路14に接続されている。整流回路14は、整流素子として6個のダイオード16を備える。整流回路14には、上下のダイオード16の組が、電力伝送線U1,V1およびW1に対応して設けられている。上下のダイオード16の組においては、上側のダイオード16のアノード端子が下側のダイオード16のカソード端子に接続されている。また、各組の上側のダイオード16のカソード端子は、DC/DCコンバータ回路20と車両駆動回路26とを接続する正極伝送線22に接続され、各組の下側のダイオード16のアノード端子はDC/DCコンバータ回路20と車両駆動回路26とを接続する負極伝送線24に接続されている。
【0028】
各ダイオード16は、アノード端子の電位がカソード端子の電位よりも高いときに導通する。これによって、整流回路14は、3相交流電力を直流電力に変換する。すなわち、整流回路14は、各ダイオード16の整流作用により、電力伝送線U1、V1およびW1の相互間の交流電圧を直流電圧に変換し、正極伝送線22および負極伝送線24に出力する。
【0029】
DC/DCコンバータ回路20には二次電池18の正極および負極が接続されている。DC/DCコンバータ回路20は、二次電池18の出力電圧を昇圧し、昇圧電圧Vhを正極伝送線22および負極伝送線24との間に出力する。コントロールユニット30は、DC/DCコンバータ回路20を制御して昇圧電圧Vhを変化させる電圧制御部32を備え、DC/DCコンバータ回路20を制御する。
【0030】
正極伝送線22および負極伝送線24には車両駆動回路26が接続されている。また、車両駆動回路26には、モータジェネレータMG2の電力伝送線U2、V2およびW2が接続されている。車両駆動回路26は、正極伝送線22および負極伝送線24から与えられる直流電力を3相交流電力に変換し、その3相交流電力をモータジェネレータMG2に出力する。また、車両駆動回路26は、モータジェネレータMG2から与えられる3相交流電力を直流電力に変換し、その直流電力を正極伝送線22および負極伝送線24に出力する。車両駆動回路26が正極伝送線22および負極伝送線24側からモータジェネレータMG2に電力を供給するか、モータジェネレータMG2から正極伝送線22および負極伝送線24側に電力を供給するかは、正極伝送線22および負極伝送線24の線間電圧、モータジェネレータMG2の回転状態、DC/DCコンバータ回路20の動作状態、車両駆動回路26の動作状態等によって決定される。
【0031】
モータジェネレータMG2のシャフトには、車輪にトルクを伝達するトルク伝達機構28が取り付けられている。車両を加速するときは、車両駆動回路26からモータジェネレータMG2に電力が供給される。これによって、モータジェネレータMG2は加速トルクを発生し、車両を加速する。また、車両を回生制動するときは、モータジェネレータMG2から車両駆動回路26に発電電力が供給される。これによって、モータジェネレータMG2は制動トルクを発生し、車両を制動する。
【0032】
コントロールユニット30は、モータジェネレータMG1に設けられたレゾルバ38から、モータジェネレータMG1の回転数の検出値を読み込む。また、コントロールユニット30は、モータジェネレータMG1の電力伝送線V1およびW1の各電流を検出する電流センサ40から、電力伝送線V1およびW1の各電流検出値を読み込み、さらに、昇圧電圧Vhを検出する電圧計42から検出値を読み込む。そして、回転数の検出値、電力伝送線V1およびW1の電流検出値、ならびに昇圧電圧Vhの検出値に基づいてモータジェネレータMG1のトルクを求める。また、コントロールユニット30は、電力伝送線V1およびW1の電流検出値と、昇圧電圧Vhの検出値とに基づいてモータジェネレータMG1の発電電力を求める。コントロールユニット30は、回転数の検出値、求められたモータジェネレータMG1のトルクおよび発電電力を、モータジェネレータMG1の発電制御に用いる。
【0033】
図2には、シリーズハイブリッド車両駆動システムの回路構成例が示されている。図1に示される構成要素と同一の構成要素については同一の符号を付してその説明を省略する。DC/DCコンバータ回路20は、インダクタ48、第1IGBT(Insulated Gate Bipolar Transistor)50、第2IGBT52、ダイオード54、および出力コンデンサ56を備える。ここで、IGBTの代わりに、サイリスタ、トライアック、バイポーラトランジスタ、電界効果トランジスタ等のその他の半導体素子を用いてもよい。
【0034】
インダクタ48の一端は二次電池18の正極に接続されている。インダクタ48の他端は、第1IGBT50のエミッタ端子、および第2IGBT52のコレクタ端子に接続されている。第1IGBT50のコレクタ端子は正極伝送線22に接続され、第2IGBT52のエミッタ端子は負極伝送線24に接続されている。第1IGBT50および第2IGBT52のそれぞれのコレクタ端子とエミッタ端子との間には、エミッタ端子側がアノード端子となるようダイオード54が接続されている。正極伝送線22と負極伝送線24との間には出力コンデンサ56が接続されている。
【0035】
第1IGBT50および第2IGBT52に対しては、コントロールユニット30によって、電圧目標値に応じたデューティ比を以て交互にスイッチングが行われる。これによって、インダクタ48にはデューティ比に応じた誘導起電力が発生する。そして、二次電池18の出力電圧に誘導起電力を加えた電圧が昇圧電圧Vhとして出力コンデンサ56に充電され、正極伝送線22および負極伝送線24に昇圧電圧Vhが出力される。
【0036】
車両駆動回路26は、インバータ回路58によって構成されている。インバータ回路58は、それぞれが上側IGBT60および下側IGBT62を含む3組のIGBT組58u、58vおよび58wを備える。各IGBT組における上側IGBT60のエミッタ端子は同じ組の下側IGBT62のコレクタ端子に接続されている。また、各IGBTのコレクタ端子とエミッタ端子との間には、エミッタ端子側がアノード端子となるようダイオード64が接続されている。
【0037】
各IGBT組の上側IGBT60のコレクタ端子は共通に接続され正極伝送線22に接続されている。また、各IGBT組の下側IGBT62のエミッタ端子は共通に接続され負極伝送線24に接続されている。
【0038】
IGBT組58uの上側IGBT60と下側IGBT62の接続節点には、モータジェネレータMG2の電力伝送線U2が接続されている。また、IGBT組58vの上側IGBT60と下側IGBT62の接続節点には、モータジェネレータMG2の電力伝送線V2が接続され、IGBT組58wの上側IGBT60と下側IGBT62の接続節点には、MG2の電力伝送線W2が接続されている。
【0039】
ここでは、インバータ回路58のスイッチング素子としてIGBTを用いた例を示しているが、スイッチング素子としては、サイリスタ、トライアック、バイポーラトランジスタ、電界効果トランジスタ等のその他の半導体素子を用いてもよい。
【0040】
コントロールユニット30は、各IGBT組が備える上側IGBT60および下側IGBT62に対しスイッチング制御を行う。インバータ回路58は、このスイッチング制御によって、DC/DCコンバータ回路20および整流回路14と、モータジェネレータMG2との間で直流交流変換を行うと共に、モータジェネレータMG2との間で授受される電力を調整する。
【0041】
3.シリーズハイブリッド車両駆動システムにおける発電制御
(1)制御の概要
シリーズハイブリッド車両駆動システムは、発電の際のエネルギー損失を抑制するという観点から求められた第1電圧目標値、およびユーザの運転操作に応じた走行制御を実行するという観点から求められた第2電圧目標値のうち、値が大きい方に昇圧電圧Vhを一致させる制御を実行する。
【0042】
すなわち、コントロールユニット30は、エネルギー損失を抑制するという条件(エンジン12について最適燃費条件が満たされるという条件)の下、モータジェネレータMG1に対する発電電力要求値に基づいて、昇圧電圧Vhに対する仮の目標値として第1電圧目標値を求める。さらに、モータジェネレータMG2の駆動制御に応じて、昇圧電圧Vhに対する仮の目標値として第2電圧目標値を求める。そして、第2電圧目標値が第1電圧目標値より大きいときは、コントロールユニット30は、昇圧電圧Vhが第2電圧目標値となるようDC/DCコンバータ回路20を制御する。他方、第2電圧目標値が第1電圧目標値以下であるときは、コントロールユニット30は、昇圧電圧Vhが第1電圧目標値となるようDC/DCコンバータ回路20を制御する。これによって、モータジェネレータMG1による発電電力を低エネルギー損失の条件下で確保すると共に、ユーザの運転操作に応じた走行制御を実行することができる。
【0043】
ここで、昇圧電圧Vhが第2電圧目標値となるようDC/DCコンバータ回路20を制御した場合には、発電の際のエネルギー損失が増大することがある。そこで、本実施形態に係るシリーズハイブリッド車両駆動システムにおいては間欠発電制御が行われる。間欠発電制御は、エンジン12の始動および停止の繰り返しにより、間欠的にモータジェネレータMG1を駆動する制御である。
【0044】
間欠発電制御には、要求電力依存・間欠制御および発電効率依存・間欠制御がある。要求電力依存・間欠制御は、モータジェネレータMG1に対する発電電力要求値の変化に基づいて、エンジン12の始動および停止を行う制御である。発電効率依存・間欠制御は、モータジェネレータMG2の駆動制御に伴って予測される発電効率に基づいて、エンジン12の始動および停止を行う制御である。
【0045】
(2)発電制御の具体例
図3には、発電制御のフローチャートが示されている。コントロールユニット30は、運転操作部44における操作、走行状態、二次電池18の充電状態等に関する車両動作情報に基づいて二次電池18の充電要求電力Pbを求める。そして、充電要求電力Pbに基づいてモータジェネレータMG1の発電電力要求値Pを求める(S101)。コントロールユニット30は、記憶部36に予め記憶されているエンジン12の最適燃費条件に関する情報を取得し(S102)、エンジン12について最適燃費条件が満たされるという条件の下、発電電力要求値Pに基づいて第1電圧目標値V1を求める(S103)。具体的には、コントロールユニット30は、モータジェネレータMG1の回転数対トルク特性に基づいて、次のように第1電圧目標値V1を決定する。
【0046】
図4には、モータジェネレータMG1の回転数対トルク特性が示されている。この回転数対トルク特性は、予め記憶部36に記憶され、モータジェネレータMG1の制御においてコントロールユニット30によって参照される。横軸は回転数Nを示し、縦軸はモータジェネレータMG1からエンジン12に与えられるトルクTを示す。図4には、昇圧電圧をVh1、Vhm、およびVh2で一定にした場合のそれぞれにつき、回転数NとトルクTとの関係がNT特性曲線Vh1、Vhm、およびVh2として示されている。ここで、昇圧電圧Vh1、Vhm、およびVh2には、Vh1<Vhm<Vh2の関係がある。また、図4には、エンジン12の最適燃費条件が成立するトルクTおよび回転数Nを示す曲線が、最適燃費線OPTとして示されている。さらに、図4には、発電電力がP0、P1およびP2であることを示す等電力線P0、P1およびP2がそれぞれ示されている。発電電力要求値PをP0とした場合、最適燃費線OPTと等電力線P0との交点Aを通るNT特性曲線Vh1に対応する昇圧電圧Vh1が、第1電圧目標値V1として求められる。
【0047】
次に、コントロールユニット30は、運転操作部44における操作、走行状態等に基づいてモータジェネレータMG2のトルク要求値を求める(S104)。そして、トルク要求値に基づいて、昇圧電圧Vhに対する仮の目標値として、第2電圧目標値V2を求める(S105)。
【0048】
コントロールユニット30は、第2電圧目標値V2が第1電圧目標値V1より大きいか否かを判定する(S106)。そして、第2電圧目標値V2が第1電圧目標値V1以下であるときは、昇圧電圧Vhを第1電圧目標値V1に一致させる(S107)。ここで、本願明細書における「一致」とは、2つの値の差異が所定の誤差範囲内であることをいうものとする。これによって、図4におけるNT平面上の動作点は点Aとなる。エンジン12は、最適燃費条件が成立する状態でモータジェネレータMG1にトルクを与え、モータジェネレータMG1は発電電力要求値P0の電力を発電する。
【0049】
コントロールユニット30は、第2電圧目標値V2が第1電圧目標値V1より大きいときは、昇圧電圧Vhを第2電圧目標値V2に一致させる(S108)。ここで、Vh2=V2であるものとすると、図4におけるNT平面上の動作点は点Aから、第2電圧目標値V2に対応するNT特性曲線Vh2と等電力線P0との交点B0に至る。その後、コントロールユニット30は、昇圧電圧Vhを第2電圧目標値V2に一致させた状態で、エンジン12およびモータジェネレータMG1に対し、間欠発電制御(S109)として、要求電力依存・間欠制御を実行する。
【0050】
(3)要求電力依存・間欠制御
要求電力依存・間欠制御は、モータジェネレータMG2の制御を優先させて昇圧電圧Vhが調整されるという条件の下、モータジェネレータMG1に対する発電電力要求値の変化に基づいて、エンジン12の始動および停止を行う制御である。
【0051】
図5には、ステップS109で実行される間欠発電制御として要求電力依存・間欠制御のフローチャートが示されている。この制御においては、発電電力要求値Pに対する閾値として、P0より大きい第1閾値P1、および、第1閾値P1より大きい第2閾値P2が予め定められる。
【0052】
コントロールユニット30は、現時点においてエンジン12が停止しているか否かを認識する(S201)。そして、エンジン12が停止していると認識したときは、発電電力要求値Pが第2閾値P2未満であるか否かを判定する(S202)。コントロールユニット30は、発電電力要求値Pが第2閾値P2未満であるときは、エンジン12が停止している状態を維持する(S203)。一方、発電電力要求値Pが第2閾値P2以上であるときは、エンジン12の始動制御を実行する(S204)。
【0053】
コントロールユニット30は、エンジン12が駆動状態にあると認識したときは、発電電力要求値Pが第1閾値P1を超えるか否かを判定する(S205)。そして、発電電力要求値Pが第1閾値P1を超えるときは、エンジン12の駆動状態を維持する(S206)。一方、発電電力要求値Pが第1閾値P1以下であるときは、コントロールユニット30は、エンジン12の停止制御を実行する(S207)。コントロールユニット30は、このような要求電力依存・間欠制御を実行した後、図3のステップS101、ステップS102、およびステップS104に戻る(R)。
【0054】
このような処理によれば、第2電圧目標値V2が第1電圧目標値V1よりも大きい場合には、ステップS106の判定に基づき、ステップS108およびS109が繰り返し実行される(R)。これによって、コントロールユニット30は次のような処理を実行する。すなわち、コントロールユニット30は、発電電力要求値Pが、第1閾値P1から増加して第2閾値P2に達したときにエンジン12の始動制御を実行し、その後、発電電力要求値Pが第2閾値P2から減少し第1閾値P1に達したときにエンジン12の停止制御を実行する。
【0055】
図6(a)〜(d)には、それぞれ、(a)車両駆動回路26からモータジェネレータMG2に供給される駆動電力Pv、(b)二次電池18のSOC(State Of Charge)、(c)充電要求電力Pb、および(d)発電電力要求値Pの時間変化が示されている。ここでは、モータジェネレータMG2に対するトルク要求値が一定であり、図6(a)に示されるように駆動電力Pvもまた一定であるものとする。また、第1電圧目標値V1<第2電圧目標値V2の関係が成立しているものとする。
【0056】
図6(d)に示されるように、図3のステップS108から間欠発電制御(S109)に移行した初期時刻t0において、発電電力要求値PはP0である。発電電力要求値P0は、第1閾値P1より小さいため、コントロールユニット30はエンジン12を停止した状態を維持する。
【0057】
図6に示される動作例では駆動電力Pvが一定であるため、二次電池18に充電された電力は、車両の走行によって消費される。時刻t0においてエンジン12は停止しており、モータジェネレータMG1による発電が行われないため、SOCは時間の経過と共に減少する。これによって、初期時刻t0以降、充電要求電力Pbおよび発電電力要求値Pは増加する。
【0058】
発電電力要求値Pが、時刻t1において第2閾値P2に達すると、コントロールユニット30は、エンジン12の始動制御を行う。これによって、モータジェネレータMG1による発電が行われ、SOCは時間の経過と共に増加し、充電要求電力Pbおよび発電電力要求値Pは時間の経過と共に減少する。
【0059】
発電電力要求値Pが、時刻t2において第1閾値P1に達すると、コントロールユニット30は、エンジン12の停止制御を行う。これによって、モータジェネレータMG1による発電が停止し、SOCは時間の経過と共に減少し、充電要求電力Pbおよび発電電力要求値Pは時間の経過と共に増加する。
【0060】
発電電力要求値Pが、時刻t3において第2閾値P2に達すると、コントロールユニット30は、エンジン12の始動制御を行う。これによって、モータジェネレータMG1による発電が行われ、SOCは時間の経過と共に増加し、充電要求電力Pbおよび発電電力要求値Pは時間の経過と共に減少する。このように、時刻t0〜t1の時間、時刻t1〜t2の時間、時刻t2〜t3の時間、・・・・・で、エンジン12は、停止状態および駆動状態を繰り返す。発電電力要求値Pが第1閾値P1に達したときは、動作点は図4の点B1となり、発電電力要求値Pが第2閾値P2に達したときは、動作点は図4の点B2となる。ここで、点B1は、等電力線P1とNT特性曲線Vh2との交点であり、点B2は、等電力線P2とNT特性曲線Vh2との交点である。
【0061】
このような制御によれば、第2電圧目標値V2が第1電圧目標値V1以下であるときは、昇圧電圧Vhを第1電圧目標値V1と一致させる制御が実行され、第2電圧目標値V2が第1電圧目標値V1よりも大きいときは、昇圧電圧Vhを第2電圧目標値V2と一致させる制御が実行される。これによって、モータジェネレータMG1による発電電力を低エネルギー損失の条件下で確保すると共に、ユーザの運転操作に応じた走行制御を実行することができる。
【0062】
さらに、昇圧電圧Vhを第2電圧目標値V2と一致させる制御が実行された場合には、要求電力依存・間欠発電制御が実行される。一般に、エンジン12およびモータジェネレータMG1におけるエネルギー損失は、動作点を最適燃費線OPT上に設定することで小さくなる。しかし、昇圧電圧Vhを第2電圧目標値V2と一致させる制御が実行された場合には、最適燃費線OPT上に動作点を設定することが困難となり、エネルギー損失を抑制することが困難となる。そこで、本実施形態に係る要求電力依存・間欠制御においては、エンジン12およびモータジェネレータMG1を間欠的に停止し、エネルギー損失を抑制する。
【0063】
(4)発電効率依存・間欠制御
発電効率依存・間欠制御は、モータジェネレータMG2の制御を優先させて昇圧電圧Vhが調整されるという条件の下、モータジェネレータMG2の駆動制御に伴って予測される発電効率に基づいて、エンジン12の始動および停止を行う制御である。具体的には、昇圧電圧Vhを第1電圧目標値V1に一致させ、さらに、発電電力を発電電力要求値Pに一致させた場合の第1発電効率を求め、昇圧電圧Vhを第2電圧目標値V2に一致させ、さらに発電電力を発電電力要求値Pに一致させた場合の第2発電効率を求める。そして、第1発電効率と第2発電効率との差異に応じて間欠発電制御を行う。発電効率は、例えば、エンジン12に供給された燃料を仕事率(単位はJ/s)に換算した値に対する、発電電力(単位はJ/s)の比率として定義される。
【0064】
図7には、ステップS109で実行される間欠発電制御として発電効率依存・間欠制御のフローチャートが示されている。コントロールユニット30は、昇圧電圧Vhを第1電圧目標値V1に一致させ、さらに、発電電力を発電電力要求値Pに一致させた場合の第1発電効率η1を求める(S301)。また、コントロールユニット30は、昇圧電圧Vhを第2電圧目標値V2に一致させ、さらに、発電電力を発電電力要求値Pに一致させた場合の第2発電効率η2を求める(S302)。これらの処理は、記憶部36に記憶されている発電効率マップを参照することで行われる。発電効率マップは、昇圧電圧Vhと、モータジェネレータMG1による発電電力と、エンジン12およびモータジェネレータMG1における発電効率とを対応付けたものである。発電効率マップは、シミュレーション、実験等によって作成され記憶部36に記憶されている。
【0065】
コントロールユニット30は、第1発電効率η1から第2発電効率η2を減算した判定値Dを求める(S303)。そして、判定値Dが判定閾値Tよりも大きいか否かを判定する(S304)。コントロールユニット30は、判定値Dが判定閾値Tよりも大きい場合には、発電停止制御を実行する(S305)。ここで発電停止制御は、エンジン12が駆動状態にあるときはエンジン12を停止させ、エンジン12が停止した状態にあるときはその状態を維持する制御である。一方、判定値Dが判定閾値T以下であるときは、コントロールユニット30は、発電駆動制御を実行する(S306)。ここで発電駆動制御は、エンジン12が停止した状態にあるときはエンジン12を始動し、エンジン12が駆動状態にあるときはその状態を維持する制御である。コントロールユニット30は、このような発電効率依存・間欠制御を実行した後、図3のステップS101、ステップS102、およびステップS104に戻る(R)。
【0066】
発電効率依存・間欠制御によれば、昇圧電圧Vhを第2電圧目標値V2と一致させる制御が実行された場合において、次のような原理に基づいてエネルギー損失を抑制することができる。図8には、モータジェネレータMG1の回転数対トルク特性が示されている。図4に示されている事項と同一の事項については同一の符号を付する。図8には、昇圧電圧をVha、Vhb、およびVhcで一定にした場合のそれぞれにつき、回転数NとトルクTとの関係がNT特性曲線Vha、Vhb、およびVhcとして示されている。昇圧電圧Vha、Vhb、およびVhcには、Vha<Vhb<Vhcの関係がある。
【0067】
ここで、図3のフローチャートにおける最初の間欠発電制御(S109)において、発電電力要求値PがP0、第1電圧目標値V1がVha、第2電圧目標値V2がVhcであったものとする。このとき、第1発電効率η1は動作点A0に対して求められ、第2発電効率η2は動作点C0に対して求められる。ここで、動作点A0は、等電力線P0と最適燃費線OPTとの交点であり、動作点C0は、等電力線P0とNT特性曲線Vhcとの交点である。
【0068】
動作点A0および動作点C0における発電効率を、それぞれη1(A0)およびη2(C0)とすると、判定値Dは、D=η1(A0)−η2(C0)である。この判定値Dが判定閾値Tよりも大きい場合には、コントロールユニット30は、発電停止制御を実行し、判定値Dが判定閾値T以下である場合には、コントロールユニット30は、発電駆動制御を実行する。
【0069】
次に、繰り返し経路Rを経た第2回目の間欠発電制御(S109)において、発電電力要求値PがP1、第1電圧目標値V1がVhb、第2電圧目標値V2がVhcであったものとする。このとき、第1発電効率η1は、動作点Bに対して求められ、第2発電効率η2は、動作点C1に対して求められる。ここで、動作点Bは、等電力線P1と最適燃費線OPTとの交点であり、動作点C1は、等電力線P1とNT特性曲線Vhcとの交点である。動作点Bおよび動作点C1における発電効率を、それぞれη1(B)およびη2(C1)とすると、判定値Dは、D=η1(B)−η2(C1)である。この判定値Dが判定閾値Tよりも大きい場合には、コントロールユニット30は、発電停止制御を実行し、判定値Dが判定閾値T以下である場合には、コントロールユニット30は、発電駆動制御を実行する。
【0070】
判定値Dは、最適燃費線OPTから離れてエンジン12およびモータジェネレータMG1を動作させた場合における、発電効率の低下の度合いを示す値である。判定値Dが大きい程、エンジン12およびモータジェネレータMG1におけるエネルギー損失は大きくなる。
【0071】
図8に示される例では、最初の判定値D=η1(A1)−η2(C0)は、第2回目の判定値D=η1(B)−η2(C1)よりも大きい。ここで、判定閾値Tが、第2回目の判定値D=η1(B)−η2(C1)以上の値、かつ、最初の判定値D=η1(A1)−η2(C0)よりも小さい値として設定されている場合には、最初の間欠発電制御では発電停止制御が実行され、第2回目の間欠発電制御では、発電駆動制御が実行されることとなる。これによって、最適燃費線OPTから大きく離れることが予測される最初の間欠発電制御においては、発電停止制御を実行し、エネルギー損失を抑制することができる。
【0072】
判定閾値Tは、最適燃費線OPTから離れてエンジン12およびモータジェネレータMG1を動作させる場合において、発電効率に対して許容され得る最大の低下を鑑みて、実験、シミュレーション等に基づいて決定すればよい。
【符号の説明】
【0073】
12 エンジン、14 整流回路、16,54,64 ダイオード、18 二次電池、20 DC/DCコンバータ回路、22 正極伝送線、24 負極伝送線、26 車両駆動回路、28 トルク伝達機構、30 コントロールユニット、32 電圧制御部、34 エンジン制御部、36 記憶部、38 レゾルバ、40 電流センサ、42 電圧計、44 運転操作部、48 インダクタ、50 第1IGBT、52 第2IGBT、56 出力コンデンサ、58 インバータ回路、58u,58v,58w IGBT組、60 上側IGBT、62 下側IGBT、G ジェネレータ、M 走行用モータ。
【特許請求の範囲】
【請求項1】
エンジンと、
前記エンジンを制御するエンジン制御部と、
前記エンジンとの間でトルクを作用し合うジェネレータと、
前記ジェネレータの交流発電電力を直流電力に変換し、車両を電力駆動する車両駆動部に至る電力経路にその直流電力を出力する整流回路と、
前記整流回路と前記車両駆動部との間の電力経路に、二次電池の出力電圧を調整した電力経路電圧を出力すると共に、前記電力経路と前記二次電池との間で電力を伝達するコンバータ回路と、
前記コンバータ回路を制御し、前記電力経路電圧を調整する電圧制御部と、
前記二次電池の充電状態に基づいて前記ジェネレータに対する発電電力要求値を決定する発電電力要求値決定部と、を備え、
前記電圧制御部は、前記車両駆動部の動作に応じて前記電力経路電圧の目標値を決定し、前記電力経路電圧を前記目標値に調整し、
前記エンジン制御部は、前記発電電力要求値に基づいて前記エンジンを制御する、
ことを特徴とする車両搭載用発電装置。
【請求項2】
請求項1に記載の車両搭載用発電装置において、
前記エンジン制御部は、前記発電電力要求値の変化に基づいて前記エンジンの始動制御または停止制御を行う、
ことを特徴とする車両搭載用発電装置。
【請求項3】
請求項2に記載の車両搭載用発電装置において、
前記エンジン制御部は、
前記発電電力要求値が第1閾値から増加して第2閾値に達したときに前記エンジンの始動制御を行い、その後、前記発電電力要求値が前記第2閾値から減少し前記第1閾値に達したときに前記エンジンの停止制御を行う、
ことを特徴とする車両搭載用発電装置。
【請求項4】
請求項1から請求項3のいずれか1項に記載の車両搭載用発電装置において、
前記電圧制御部は、
前記二次電池の充電状態に応じて前記電力経路の第1目標値を決定し、前記車両駆動部の動作に応じて前記電力経路電圧の第2目標値を決定する電圧目標値決定手段を備え、
前記第2目標値が前記第1目標値を超えるときに、前記電力経路電圧を前記第2目標値に調整する、
ことを特徴とする車両搭載用発電装置。
【請求項5】
エンジンと、
前記エンジンを制御するエンジン制御部と、
前記エンジンとの間でトルクを作用し合うジェネレータと、
前記ジェネレータの交流発電電力を直流電力に変換し、車両を電力駆動する車両駆動部に至る電力経路にその直流電力を出力する整流回路と、
前記整流回路と前記車両駆動部との間の電力経路に、二次電池の出力電圧を調整した電力経路電圧を出力すると共に、前記電力経路と前記二次電池との間で電力を伝達するコンバータ回路と、
前記二次電池の充電状態に基づいて前記ジェネレータに対する発電電力要求値を決定する発電電力要求値決定部と、
前記二次電池の充電状態に応じて前記電力経路電圧の第1目標値を決定し、前記車両駆動部の動作に応じて前記電力経路電圧の第2目標値を決定する電圧目標値決定部と、備え、
前記エンジン制御部は、
前記電力経路電圧を前記第1目標値に一致させ、さらに、前記ジェネレータの発電電力を前記発電電力要求値に一致させた場合の前記エンジンおよび前記ジェネレータにおける第1発電効率と、
前記電力経路電圧を前記第2目標値に一致させ、さらに、前記ジェネレータの発電電力を前記発電電力要求値に一致させた場合の前記エンジンおよび前記ジェネレータにおける第2発電効率と、の差異に応じて前記エンジンを制御する、
ことを特徴とする車両搭載用発電装置。
【請求項6】
請求項5に記載の車両搭載用発電装置において、
前記エンジン制御部は、
前記第1発電効率から前記第2発電効率を減じた減算値が所定の閾値を超えるときに、前記エンジンを停止させ、前記減算値が前記所定の閾値以下であるときに、前記エンジンを駆動させること、
を特徴とする、車両搭載用発電装置。
【請求項7】
請求項5または請求項6に記載の車両搭載用発電装置において、
前記コンバータ回路を制御し、前記第2目標値が前記第1目標値を超えるときに、前記電力経路電圧を前記第2目標値に調整する電圧制御部、
を備えることを特徴とする車両搭載用発電装置。
【請求項1】
エンジンと、
前記エンジンを制御するエンジン制御部と、
前記エンジンとの間でトルクを作用し合うジェネレータと、
前記ジェネレータの交流発電電力を直流電力に変換し、車両を電力駆動する車両駆動部に至る電力経路にその直流電力を出力する整流回路と、
前記整流回路と前記車両駆動部との間の電力経路に、二次電池の出力電圧を調整した電力経路電圧を出力すると共に、前記電力経路と前記二次電池との間で電力を伝達するコンバータ回路と、
前記コンバータ回路を制御し、前記電力経路電圧を調整する電圧制御部と、
前記二次電池の充電状態に基づいて前記ジェネレータに対する発電電力要求値を決定する発電電力要求値決定部と、を備え、
前記電圧制御部は、前記車両駆動部の動作に応じて前記電力経路電圧の目標値を決定し、前記電力経路電圧を前記目標値に調整し、
前記エンジン制御部は、前記発電電力要求値に基づいて前記エンジンを制御する、
ことを特徴とする車両搭載用発電装置。
【請求項2】
請求項1に記載の車両搭載用発電装置において、
前記エンジン制御部は、前記発電電力要求値の変化に基づいて前記エンジンの始動制御または停止制御を行う、
ことを特徴とする車両搭載用発電装置。
【請求項3】
請求項2に記載の車両搭載用発電装置において、
前記エンジン制御部は、
前記発電電力要求値が第1閾値から増加して第2閾値に達したときに前記エンジンの始動制御を行い、その後、前記発電電力要求値が前記第2閾値から減少し前記第1閾値に達したときに前記エンジンの停止制御を行う、
ことを特徴とする車両搭載用発電装置。
【請求項4】
請求項1から請求項3のいずれか1項に記載の車両搭載用発電装置において、
前記電圧制御部は、
前記二次電池の充電状態に応じて前記電力経路の第1目標値を決定し、前記車両駆動部の動作に応じて前記電力経路電圧の第2目標値を決定する電圧目標値決定手段を備え、
前記第2目標値が前記第1目標値を超えるときに、前記電力経路電圧を前記第2目標値に調整する、
ことを特徴とする車両搭載用発電装置。
【請求項5】
エンジンと、
前記エンジンを制御するエンジン制御部と、
前記エンジンとの間でトルクを作用し合うジェネレータと、
前記ジェネレータの交流発電電力を直流電力に変換し、車両を電力駆動する車両駆動部に至る電力経路にその直流電力を出力する整流回路と、
前記整流回路と前記車両駆動部との間の電力経路に、二次電池の出力電圧を調整した電力経路電圧を出力すると共に、前記電力経路と前記二次電池との間で電力を伝達するコンバータ回路と、
前記二次電池の充電状態に基づいて前記ジェネレータに対する発電電力要求値を決定する発電電力要求値決定部と、
前記二次電池の充電状態に応じて前記電力経路電圧の第1目標値を決定し、前記車両駆動部の動作に応じて前記電力経路電圧の第2目標値を決定する電圧目標値決定部と、備え、
前記エンジン制御部は、
前記電力経路電圧を前記第1目標値に一致させ、さらに、前記ジェネレータの発電電力を前記発電電力要求値に一致させた場合の前記エンジンおよび前記ジェネレータにおける第1発電効率と、
前記電力経路電圧を前記第2目標値に一致させ、さらに、前記ジェネレータの発電電力を前記発電電力要求値に一致させた場合の前記エンジンおよび前記ジェネレータにおける第2発電効率と、の差異に応じて前記エンジンを制御する、
ことを特徴とする車両搭載用発電装置。
【請求項6】
請求項5に記載の車両搭載用発電装置において、
前記エンジン制御部は、
前記第1発電効率から前記第2発電効率を減じた減算値が所定の閾値を超えるときに、前記エンジンを停止させ、前記減算値が前記所定の閾値以下であるときに、前記エンジンを駆動させること、
を特徴とする、車両搭載用発電装置。
【請求項7】
請求項5または請求項6に記載の車両搭載用発電装置において、
前記コンバータ回路を制御し、前記第2目標値が前記第1目標値を超えるときに、前記電力経路電圧を前記第2目標値に調整する電圧制御部、
を備えることを特徴とする車両搭載用発電装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−103563(P2013−103563A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−247708(P2011−247708)
【出願日】平成23年11月11日(2011.11.11)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月11日(2011.11.11)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]