
車両支援方法及び車両支援装置
【課題】 勾配変化地点の先にコーナ開始点が存在し、そのコーナ開始点が視認できないとき、その旨を報知して運転者に的確な道路情報を伝達して走行中の違和感を解消する車両支援方法及び車両支援装置を提供する。
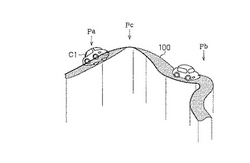
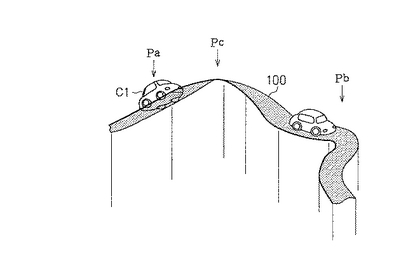
【解決手段】 車両C1の自車位置Paから予め定めた所定距離にコーナ開始点Pbと勾配変化点Pcがあって、その勾配変化点Pcが自車位置Paとコーナ開始点Pbの間にある時、自車位置Paからコーナ開始点Pbが視認できるかどうか判定する。そして、自車位置Paからコーナ開始点Pbが視認できないと判定したとき、その旨を運転者に報知する。
【解決手段】 車両C1の自車位置Paから予め定めた所定距離にコーナ開始点Pbと勾配変化点Pcがあって、その勾配変化点Pcが自車位置Paとコーナ開始点Pbの間にある時、自車位置Paからコーナ開始点Pbが視認できるかどうか判定する。そして、自車位置Paからコーナ開始点Pbが視認できないと判定したとき、その旨を運転者に報知する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両支援方法及び車両支援装置に関する。
【背景技術】
【0002】
従来、自車両の現在地が急カーブなどの減速地点に接近すると、そのカーブへの接近を音声で警告するナビゲーション装置が提案されている(例えば、特許文献1)。
【特許文献1】特開平9−35186号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところが、上記したようナビゲーション装置では、自車両の現在地がカーブから所定距離以内に接近すると常にカーブへの接近を警告するため、運転者が前方のカーブの存在を十分に視認して走行している場合でも警告が行われてしまう。そのため、不要な警告が行われ、運転者にとって煩わしくなる。
【0004】
本発明は、上記問題点に鑑みてなされたものであり、その目的は、視認できないコーナが存在する場合のみ、コーナがある旨を報知して、運転者に的確な道路状況を伝達する車両支援方法及び車両支援装置を提供することにある。
【課題を解決するための手段】
【0005】
請求項1の発明は、車両走行時の車両支援方法において、自車位置から前方へ予め定めた所定距離内にあるコーナ開始点を求めるステップと、前記自車位置から予め定めた前記所定距離内にある勾配変化点を求めるステップと、前記勾配変化点が前記自車位置と前記コーナ開始点の間にある時、前記自車位置から前記コーナ開始点が視認できるかどうか判定するステップと、前記自車位置から前記コーナ開始点が視認できないと判定したとき、運転者に視認できないコーナがある旨を報知するステップとからなる。
【0006】
請求項2の発明は、自車位置を検出する自車位置検出手段と、道路情報を記憶した道路情報記憶手段と、前記道路情報記憶手段に記憶された道路情報中の道路勾配情報から勾配変化点を求める勾配変化点演算手段と、前記道路情報記憶手段に記憶された道路情報からコーナ開始点を求めるコーナ開始点演算手段と、前記自車位置と前記コーナ開始点との間に勾配変化点があるかどうか判断する位置判断手段と、前記自車位置と前記コーナ開始点との間に勾配変化点があるとき、前記自車位置から前記コーナ開始点が視認できないかどうか判定する視認判定手段と、前記自車位置から前記コーナ開始点が視認できないとき、運転者に視認できないコーナがある旨の報知を行う報知手段とを備えた車両支援装置。
【0007】
請求項3の発明は、請求項2に記載の車両支援装置において、前記勾配変化点演算手段は、自車位置から前方へ予め定めた所定距離内にあるコーナ開始点を演算ものであり、前記コーナ開始点演算手段は、同じく自車位置から前方へ予め定めた前記所定距離内にあるコーナ開始点を演算するものである。
【0008】
請求項4の発明は、請求項2又は3に記載の車両支援装置において、前記コーナ開始点は、道路がクロソイド曲線であらわされるときのクロソイド曲線の開始点である。
請求項5の発明は、請求項2又は3に記載の車両支援装置において、前記コーナ開始点は、交差点である。
【0009】
請求項6の発明は、請求項2に記載の車両支援装置において、前記視認判定手段は、自
車位置、運転者の視線高さ、運転者視角、及び、道路情報に基づいて判定する。
【発明の効果】
【0010】
請求項1の発明によれば、勾配変化点の先であって視認できないコーナがあるとき、事前にその旨は報知される。その結果、運転者にとって、必要な場合にのみ、報知されるので、煩わせられることなく運転することができる。
【0011】
請求項2の発明によれば、勾配変化点の先であって視認できないコーナがあるとき、事前にその旨が報知される。その結果、運転者にとって、必要な場合にのみ報知されるので、煩わせられることなく運転することができる。
【0012】
請求項3の発明によれば、車両が予め定めた距離にある勾配変化点の先であって視認できないコーナ開始点があるとき、事前にコーナがある旨が報知されるので、運転者は、勾配変化点の先の視認できないコーナの存在を知ることができ、次の運転操作に対処することができる。
【0013】
請求項4の発明によれば、車両が予め定めた距離内にある勾配変化点の先であって視認できない道路のコーナ開始点があるとき、事前にその旨が報知されるので、運転者は、勾配変化点の先の視認できないコーナの存在を知ることができ、次の運転操作に対処することができる。
【0014】
請求項5の発明によれば、車両が予め定めた距離内にある勾配変化点の先であって視認できない交差点があるとき、事前にその旨が報知されるので、運転者は、勾配変化点の先の視認できない交差点の存在を知ることができ、次の運転操作に対処することができる。
【0015】
請求項6の発明によれば、自車位置、運転者の視線高さ、運転者視角、及び、道路情報に基づいて、自車位置から前記コーナ開始点が視認できないかどうか判定することができる。
【発明を実施するための最良の形態】
【0016】
以下、本発明の車両支援装置を、自動車(車両C1)に搭載され、経路案内を行うナビゲーション装置に具体化した実施形態を図1〜図10に従って説明する。
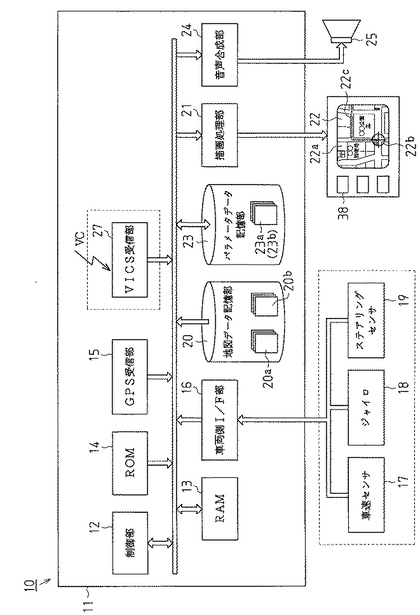
図1に示すように、ナビゲーション装置10は、制御装置11を備えている。この制御装置11は、主制御を行う制御部12、RAM13、ROM14を備えている。制御部12は、ROM14に格納された経路案内プログラム、ブラインドコーナ判定処理プログラム等、各種プログラムに従って、各種処理を行う。尚、制御部12は、特許請求の範囲に記載の自車位置検出手段、位置判断手段、勾配変化点演算手段、コーナ開始点演算手段、視認判定手段及び報知手段を構成する。
【0017】
また、制御装置11は、自車位置検出手段を構成するGPS受信部15を備えている。GPS受信部15は、GPS衛星からの電波を受信する。制御部12は、GPS受信部15から受信した検出データに基づいて、自車位置の絶対位置を示す緯度・経度・高度等の測位データを定期的に算出する。
【0018】
さらに、制御装置11は、車両側インターフェース部(車両側I/F部16)を備えている。制御部12は、この車両側I/F部16を介して、車両C1に配設された自車位置検出手段を構成する車速センサ17、ジャイロ18及びステアリングセンサ19から車両C1の車速、相対方位、及び舵角検出信号を取得する。制御部12は、車速センサ17及びジャイロ18から、車速及び相対方位を取得して、GPS受信部15による測位データにより算出した基準自車位置をもとに、車速及び相対方位に基づき、自律航法による自車
位置データを生成する。そして、GPS受信部15から測位データを逐次取得しながら、自律航法による自車位置を補正し、自車位置Paを決定する。
【0019】
また、制御装置11は、道路情報記憶手段としての地図データ記憶部20及び描画処理部21を備えている。地図データ記憶部20には、道路情報としての経路データ20a及び地図描画データ20bが格納されている。経路データ20aは、各道路の交差点や曲点を示すノードを示すノードデータや、各ノードを接続するリンクを示すリンクデータ等を格納しており、制御部12は、目的地までの経路案内処理を行う際に、この経路データ20a及びROM14に格納された経路案内プログラムに従って経路を探索する。また、制御部12は、上記したように算出した自車位置データと、走行軌跡、経路データ20aを照合して、自車位置座標を適切な道路上に位置決めし、自車位置データをさらに補正する。
【0020】
また、経路データ20aは、各ノード毎のそのノードにおける勾配(絶対勾配)の勾配情報が付加データとして記憶されている。さらに、経路データ20aは、各ノード毎のそのノードにおける曲率半径を示す曲率情報が付加データとして記憶されている。さらにまた、経路データ20aは、各ノード中にコーナの開始点Pb(クロソイド曲線の開始点)となるノードについて、コーナ開始点情報が付加データとして記憶されている。そして、制御部12は、各ノードの勾配情報に基づいて、走行中の道路において勾配変化点Pcを求めることができるようになっている。また、制御部12は、コーナ開始点情報に基づいて、走行中の道路において道路前方にあるコーナ開始点Pbを求めることができるようになっている。
【0021】
一方、地図描画データ20bは、広範囲から狭範囲の地図を表示するためのデータであって、位置座標、経路データ20aと関連付けられている。
描画処理部21は、制御部12から出力信号や自車位置Paを取得して、自車位置周辺の地図描画データ20bを抽出し、マップマッチングしながらナビゲーション装置10が具備する出力手段及びディスプレイ装置としてのディスプレイ22に出力する。これにより、ディスプレイ22には、地図画面22aと、自車位置マーク22bと、経路指標22cとが表示される。そして、描画処理部21は、車両C1の移動量に従って、地図画面22aを逐次更新する。
【0022】
さらに、制御装置11は、パラメータデータ記憶部23及び音声合成部24を備えている。パラメータデータ記憶部23には、メッセージをスピーカ25から出力するための音声ファイル23aが格納されている。音声合成部24は、制御部12から音声を指定する出力信号を受信すると、指定された音声ファイル23aを抽出、合成及びデジタル/アナログ変換して、スピーカ25から音声を出力する。
【0023】
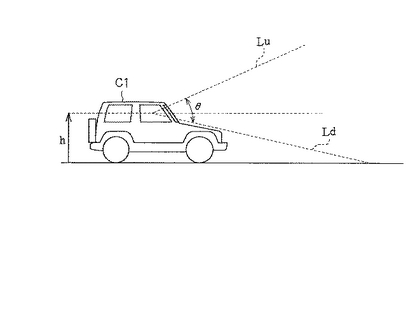
また、パラメータデータ記憶部23には、運転者パラメータファイル23bが格納されていて、運転者パラメータファイル23bには、ブラインドコーナ判定処理のための視線高さh、運転者視角θ、所定距離L、基準角度θk等のデータが記憶されている。視線高さhは、図2に示すように、運転者が運転座席に座ったときの、路面から運転者の目の位置までの高さである。また、運転者視角θは、図2に示すように、運転者が運転座席に座ったときに、運転者が、上下方向の視認できる角度をいい、本実施形態では最下側を視界最下線Ld、最上側を視界最上線Luと説明の便宜上いう。
【0024】
さらに、制御装置11は、VICS(Vehicle Information and Communication System)受信部27を備えている。VICS受信部27は、ビーコン(光ビーコン、電波ビーコン、FM多重ビーコン等)から道路交通情報VCを受信する。VICS受信部27がビーコンから受信する道路交通情報VC内には、そのビーコンが設置されている位置情報、道
路名等の道路情報、渋滞情報等の交通案内、主要地点までの推定所要時間等が格納されている。
【0025】
また、ナビゲーション装置10のディスプレイ22は、タッチパネルであって、描画処理部21から送信された地図描画データ20bを出力する。さらに、ディスプレイ22は、タッチパネル操作によって入力された入力信号、ナビゲーション装置10に配設された操作ボタン38を押釦することによって入力された入力信号を取得して、制御部12に送信する。
【0026】
次に、上記のように構成したナビゲーション装置10の作用を、制御装置11がブラインドコーナ判定処理プログラムに従った処理動作を示す図9及び図10のフローチャートに従って説明する。
【0027】
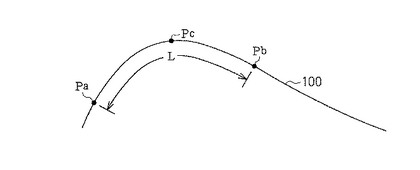
説明の便宜上、図3に示す模式図のように、車両C1が、登坂路→降坂路→コーナ路からなる道路100を走行する場合を例にして説明する。また、目的地が設定されその目的地までの経路が探索されその探索された経路(案内経路)に従って車両C1は走行するものとする。
【0028】
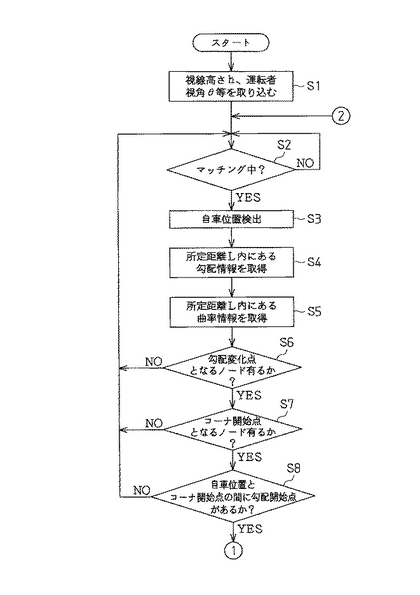
まず、制御部12は、パラメータデータ記憶部23の運転者パラメータファイル23bから視線高さh、運転者視角θ、所定距離L、基準角度θk等のデータを取り込み、RAM13に一時記憶する(ステップS1)。続いて、制御部12は、GPS受信部15から受信した検出データに基づく自車位置Paと、地図データ記憶部20に記憶された経路データ20a及び地図描画データ20bとに基づいて、車両C1が案内経路上に位置(マップマッチング)しているかどうか判断する(ステップS2)。即ち、制御部12は、経路案内プログラムに基づいて、自車位置と経路データ20aに基づいてディスプレイ22に現在地周辺の地図画面22aを表示しその地図画面22a上の道路(案内経路)に自車位置マーク22bを表示されるように、マップマッチングされているかどうか判断する。そして、例えば、経路データ20aに無い道路または場所にある場合には(ステップS2でNO)、制御部12は車両C1が経路データ20aにある道路に位置するまで待つ。車両C1が案内経路上を走行していると判断すると(ステップS2でYES)、制御部12は、GPS受信部15から受信した検出データに基づいて自車位置Paを検出する(ステップS3)。
【0029】
続いて、制御部12は、自車位置Paから前方へ予め定めた所定距離L(例えば200m)内にある勾配情報を取得する(ステップS4)。つまり、制御部12は、所定距離L(例えば200m)内に含まれる複数のノードを経路データ20aから特定し、その特定したノードに対する勾配(絶対勾配)の勾配情報を読出してRAM13に一時記憶する。
【0030】
次に、制御部12は、同じく自車位置Paから前記所定距離L内にある各ノードの曲率情報を取得する(ステップS5)。つまり、制御部12は、ステップS4で特定したノードに対する曲率情報を読出してRAM13に一時記憶する。このとき、制御部12は、コーナ開始点Pbを含むノードがある場合に、曲率情報とともに合わせてコーナ開始点Pbのコーナ開始点情報をRAM13に記憶するようになっている。
【0031】
所定距離Lにある各ノードの各々について、勾配情報、曲率情報、コーナ開始点情報を取得すると、制御部12は、所定距離L内にある各ノードに中に、勾配変化点Pcとなるノードがあるかどうか判断する(ステップS6)。制御部12は、各ノードの各々についての勾配(絶対勾配)の勾配情報に基づいて、上り(登坂路)から下り(降坂路)になる地点、又は、下り(降坂路)から上り(登坂路)になる地点(勾配変化点Pc)となるノードがあるかどうか判断する。そして、所定距離L内において勾配変化点Pcとなるノー
ドがある場合(ステップS6でYES)は、制御部12は、ステップS7に移る。尚、所定距離Lにおいて勾配変化点Pcとなるノードがない場合(ステップS6でNO)は、制御部12は、ステップS2に戻り、勾配変化点Pcとなるノードが現れるまで前記と同様な処理を繰り返す。
【0032】
ステップS7において、制御部12は、所定距離L内にある各ノードの中に、コーナ開始点情報を持ったノードがあるかどうか判断する。そして、コーナ開始点Pbを持ったノードがある場合(ステップS7でYES)、制御部12は、勾配変化点Pcが自車位置Paとコーナ開始点Pbとの間にあるかどうか判断する(ステップS8)。
【0033】
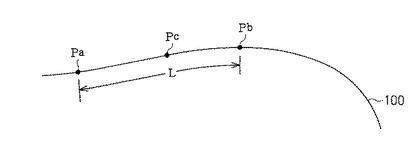
このとき、図3の模式図に示すように、車両C1が、登坂路を走行し、やがて降坂路となって、所定距離L内にコーナ開始点Pbがある地点(自車位置Pa)に到達したとする。尚、図4は、図3の示す道路100に対する勾配情報に基づく高さ方向の道路形状における自車位置Pa、コーナ開始点Pb、勾配変化点Pcを示す。尚、図4は、自車位置Paと勾配変化点Pcとを結ぶ線を垂直に通る面に対して道路100が投影されて現れる道路形状とする。また、図5は、図3の示す道路100に対する曲率情報に基づく水平方向の道路形状における自車位置Pa、コーナ開始点Pb、勾配変化点Pcを示す。
【0034】
従って、この場合、制御部12は、勾配変化点Pcが自車位置Paとコーナ開始点Pbとの間にあると判断して(ステップS8でYES)、ステップS9に移る。尚、勾配変化点Pcが自車位置Paとコーナ開始点Pbとの間にないと判断すると(ステップS8でNO)、制御部12は、ステップS2に戻る。
【0035】
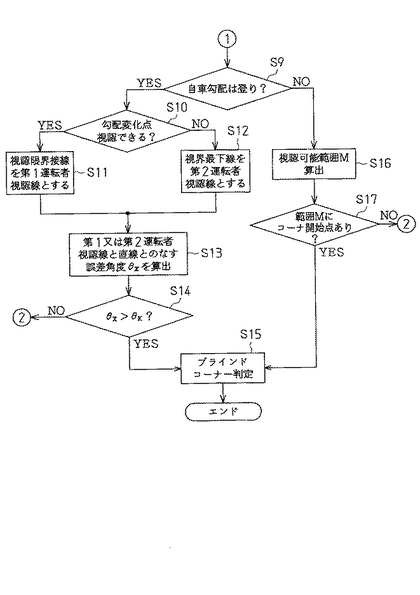
ステップS9において、制御部12は車両C1が登坂路を走行しているかどうか判断する。このとき、制御部12は、ステップS4で取得したノードの勾配情報に基づいて車両C1が登坂路を走行しているかどうか判断する。そして、この場合、図3で示したように、登坂路を走行しているので(ステップS9でYES)、制御部12はステップS10に移る。
【0036】
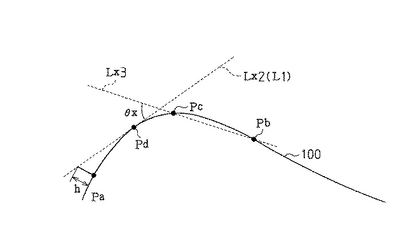
ステップS10において、制御部12は、自車位置Pa、勾配変化点Pc、及び、ステップS1で取り込んだ視線高さhと運転者視角θとで、運転席から運転者視角θで勾配変化点Pcを運転者が視認できるかどうか判断する。つまり、図6に示す座標系(図4と同じ座標系)において、自車位置Paにおいて視線高さhから道路100に接する視認限界接線L1を引き、視認限界接線L1と道路100が接する地点Pdを求める。次に、制御部12は、その求めた地点Pdが勾配変化点Pcより手前にあるかどうかを判断することによって、勾配変化点Pcを運転者が視認できるかどうか判断する。
【0037】
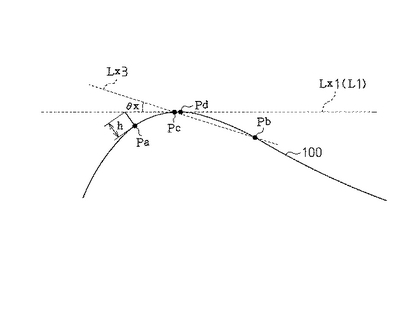
そして、制御部12は、例えば図7に示すように、地点Pdが勾配変化点Pcより後方にある場合には、勾配変化点Pcが視認できると判断する(ステップS10でYES)。反対に、制御部12は、図6に示すように、地点Pdが勾配変化点Pcより手前にある場合には、勾配変化点Pcが視認できないと判断する(ステップS10でNO)。
【0038】
そして、勾配変化点Pcが視認できると判断すると(ステップS10でYES)、制御部12は、図7に示すように、ステップS10で求めた視認限界接線L1を第1運転者視認線Lx1とする(ステップS11)。また、勾配変化点Pcが視認できないと判断すると(ステップS10でNO)、制御部12は、図6に示す座標系において、自車位置Paにおいて視線高さhから運転者視角θを設定したときの視界最下線Ldを、第2運転者視認線Lx2とする(ステップS12)。
【0039】
ステップS11又はステップS12において、第1運転者視認線Lx1又は第2運転者
視認線Lx2が求まると、制御部12は誤差角度θxの算出を行う。誤差角度θxは、第2運転者視認線Lx2にあっては、図6に示すように、同第2運転者視認線Lx2と、コーナ開始点Pbと勾配変化点Pcを結ぶ直線Lx3とのなす角度をいう。また、誤差角度θxは、第1運転者視認線Lx1にあっては、同様に、同第1運転者視認線Lx1対する、コーナ開始点Pbと勾配変化点Pcを結ぶ直線Lx3とのなす角度をいう。尚、制御部12は、まず、図6に示す座標系におけるコーナ開始点Pbと勾配変化点Pcを結ぶ直線Lx3を、コーナ開始点Pbと勾配変化点Pcの経路データ20aに基づいて演算することができる。そして、制御部12は、求めた直線Lx3と第1運転者視認線Lx1又は第2運転者視認線Lx2とのなす誤差角度θxを算出する。
【0040】
誤差角度θxを算出すると、制御部12は、誤差角度θxが予め定めた基準角度θkを超えた値かどうか判断する(ステップS14)。基準角度θkは、コーナ開始点Pbが勾配変化点Pcの近くにあったとき、登坂路の勾配が緩やかなとき、数m進むとそのコーナ開始点Pbが視認できるような場合があり、これを排除するための角度である。従って、誤差角度θxが基準角度θk以下の場合には、制御部12はコーナ開始点Pbが勾配変化点Pcの近くにあったり、登坂路の勾配が緩やかであったりして数m進むとそのコーナ開始点Pbが視認できるものと判定し(ステップS14でNO)、ステップS2に戻る。
【0041】
一方、誤差角度θxが基準角度θkを超えていると(ステップS14でYES)、制御部12は、勾配変化点Pcの先の降坂路に見えないコーナ開始点Pbがある、即ちブラインドコーナがあると判定し、その旨をスピーカ25を介して音声で報知して終了する。
【0042】
従って、運転者は、登坂中に、勾配変化点Pcの先であって比較的近い(200m先の)降坂路の位置に視認できないコーナ(コーナ開始点Pb)があることを事前に知ることができる。しかも、コーナ開始点Pbが近づくたびにスピーカ25を介して音声で報知されるのではなく、コーナ開始点Pbの手前に勾配変化点Pcが存在する場合に限ってスピーカ25を介して音声で報知するようにしたので、運転者は無用な音声報知に煩わされることはない。
【0043】
また、車両C1が定速走行制御装置で、運転者が設定した走行速度で走行制御されているとき、登坂中に、見えないコーナ開始点Pb(ブラインドコーナ)が近づくことによって、車速が落されるとき、コーナ開始点Pbが近づいたことを報知させることができる。そのため、運転者は、定速走行モードで走行しているにもかかわらず、登坂中に、速度変化が生じても理由が認識できるため違和感なく対応することができる。
【0044】
一方、ステップS9において、降坂路を走行していると判断すると(ステップS9でNO)、制御部12はステップS17に移る。ステップS17において、制御部12は、視認可能
範囲Mを算出する。
【0045】
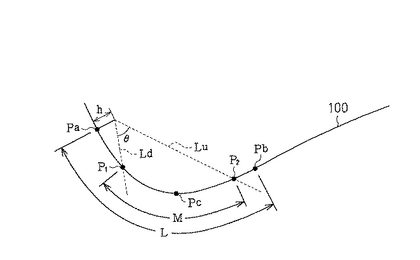
制御部12による視認可能範囲Mの算出は、以下のように行う。図8は、図4及び図6と同様に、走行中の道路100に対する勾配情報に基づく高さ方向の道路形状を示す。図8に示すように、自車位置Pa、視線高さhと運転者視角θとで、自車位置Paにおいて、運転席から運転者視角θで運転者が視認できる範囲を、視界最下線Ldと視界最上線Luを使って求める。詳述すると、制御に12は、視界最下線Ldと道路100が交差する地点P1、視界最上線Luと道路100が交差する地点P2をそれぞれ求める。この場合、降坂路なので、地点P1からの地点P2の道路区間が、運転者が視認できる範囲(視認可能範囲M)となる。
【0046】
視認可能範囲Mを算出すると、制御部12は、視認可能範囲M内にコーナ開始点Pbが
含まれてないかどうか判断する(ステップS17)。そして、視認可能範囲M内にコーナ開始点Pbが含まれていると(ステップS17でNO)、制御部12はコーナ開始点Pbが視認できるとして、ステップS2に戻る。
【0047】
反対に視認可能範囲M内にコーナ開始点Pbが含まれてないと(ステップS17でYES)、制御部12は、ステップS15に移り、勾配変化点Pcの先の登坂路に見えないコーナ開始点Pbがある、即ちブラインドコーナがあると判定し、その旨をスピーカ25を介して音声で報知して終了する。
【0048】
従って、降坂中においても、勾配変化点Pcの先であって比較的近い(200m先の)降坂路の位置に視認できないコーナ(コーナ開始点Pb)があることを事前に知ることができる。しかも、コーナ開始点Pbが近づくたびにスピーカ25を介して音声で報知されるのではなく、コーナ開始点Pbの手前に勾配変化点Pcが存在する場合に限ってスピーカ25を介して音声で報知するようにしたので、運転者は無用な音声報知に煩わされることはない。
【0049】
また、車両C1が定速走行制御装置で、運転者が設定した走行速度で走行制御されているとき、降坂中に、見えないコーナ開始点Pb(ブラインドコーナ)が近づくことによって、車速が落されるとき、コーナ開始点Pbが近づいたことを報知させることができる。そのため、運転者は、定速走行モードで走行しているにもかかわらず、降坂中に、速度変化が生じても理由が認識できるため違和感なく対応することができる。
【0050】
上記実施形態によれば、以下のような効果を得ることができる。
(1)上記実施形態では、走行中において勾配変化点Pcの先であって比較的近い位置(所定距離L)に視認できないコーナ開始点Pbがあると、事前に音声でその旨は報知されるので、運転者は、勾配変化点Pcの前で勾配変化点Pcの先の視認できないコーナ開始点Pbの存在を知ることができ、次の運転操作に対処することができる。しかも、定速走行制御装置で、定速走行モードで走行しているとき、視認できないコーナ開始点Pbによる速度変化が生じても理由が認識できるため違和感なく対応することができる。
【0051】
(2)上記実施形態では、コーナ開始点Pbが近づくたびにスピーカ25を介して音声で報知されるのではなく、コーナ開始点Pbの手前に勾配変化点Pcが存在する場合に限ってスピーカ25を介して音声で報知するようにしたので、運転者は無用な音声報知に煩わされることはない。
【0052】
(3)上記実施形態では、地図データ記憶部20に記憶した経路データ20aの各ノードに絶対勾配の勾配情報を付加したので、制御部12は、各ノードに付加した勾配情報を見るだけで簡単かつ短時間に勾配変化点Pcを求めることができる。
【0053】
尚、上記各実施形態は以下のように変更してもよい。
・上記実施形態では、コーナ開始点Pbを、道路100の形状(クロソイド曲線)のカーブの開始点とした。これを、探索して設定した目的地までの案内経路に従って走行している場合に、勾配変化点Pcの先に交差点がありその交差点を右折又は左折する案内経路の場合には、その交差点(右折地点又は左折地点)をコーナ開始点Pbとしてコーナ開始情報としてノードに付加して、勾配変化点Pcの先の視認できないコーナ(右折地点又は左折地点)がある旨の報知をするようにしてもよい。
【0054】
・さらに、右折又は左折する交差点に関係なく、勾配変化点Pcの先に交差点がある場合に、その交差点をコーナ開始点Pbとしてコーナ開始情報としてノードに付加して、勾配変化点Pcの先の視認できないコーナ(交差点)がある旨の報知をするようにしてもよ
い。
【0055】
・さらにまた、勾配変化点Pcの先に信号機がある場合に、その信号機をコーナ開始点Pbとしてコーナ開始情報としてノードに付加して、勾配変化点Pcの先の視認できないコーナ(信号機)がある旨の報知をするようにしてもよい。
【0056】
つまり、特許請求の請求範囲で記載された運転者が視認できないコーナは、道路形状のカーブに限定されず、運転者が視認できなくて報知する必要がある地点であればよく、上記した設定された目的地までの案内経路における右折地点又は左折地点、交差点、信号機も含むものである。
【0057】
・上記実施形態では、探索して設定した目的地までの案内経路に従って走行している場合について説明した。目的地までの案内経路を設定しないで、ディスプレイ22に、地図画面22aと、自車位置マーク22bが表示されている状態で走行している場合でも、勾配変化点Pcの先の視認できないコーナ開始点Pbを判定するようにして実施してもよい。
【0058】
・上記実施形態では、パラメータデータ記憶部23の運転者パラメータファイル23bに記憶した視線高さh、運転者視角θのデータを特に限定しなかったが、例えば、複数に運転者に対する視線高さh、運転者視角θが予め記憶されていて、それを、運転者が選択できるようにしてもよい。
【0059】
・上記実施形態では、パラメータデータ記憶部23の運転者パラメータファイル23bに記憶した所定距離L、基準角度θk等のデータを特に限定しなかったが、これを、例えば、所定距離Lを100m又は150mと、基準角度θkを例えば0度といったように適宜変更したり又は選択したりできるように実施してもよい。
【0060】
・上記実施形態では、地図データ記憶部20に経路データ20a及び地図描画データ20bが予め格納されたナビゲーション装置10に具体化した。これを、例えば、携帯電話網等のネットワークを介して管理センタからその時々に必要な経路データ20a及び地図描画データ20bを取得するナビゲーション装置(車両支援装置)に応用してもよい。
【0061】
・上記実施形態では、経路案内を行うナビゲーション装置10に具体化したが、経路案内を省略した装置(車両支援装置)としてもよい。この場合、地図データ記憶部20の地図描画データ20bが省略される。
【0062】
・上記実施形態では、ブラインドコーナの判定結果を音声で報知したが、ディスプレイ22にその旨を単独または音声とともに表示するようにして実施してもよい。
・上記実施形態では、各ノードに付加した絶対勾配の勾配情報に基づいて勾配変化点Pcを求めたが、各ノードの高さ(標高)データに基づいて勾配を計算して勾配変化点Pcを求めるようにしてもよい。
【0063】
・上記実施形態では、各ノードに付加したコーナ開始点情報に基づいてコーナ開始点Pbを求めたが、各ノードの座標データに基づいて曲率情報を求め、その曲率情報に基づいてコーナ開始点Pbを求めるようにしてもよい。
【0064】
・上記実施形態において、ステップS6の勾配変化点Pcの存在の判定と、ステップS7のコーナ開始点Pbの存在の判定との処理順番を、逆に行ってもよい。
・上記実施形態において、登坂路におけるコーナ開始点Pbの視認の有無判定を、ステップS10からステップS15に示す処理で行ったが、これに限定されるものではなく、
要は勾配変化点Pcの先にあるコーナ開始点Pbが視認できるがどうかが判定できればよくその他の算出方法で実施してもよい。
【図面の簡単な説明】
【0065】
【図1】本実施形態のナビゲーション装置の構成を説明する電気ブロック図。
【図2】視線高さ及び運転者視角を説明するための図。
【図3】ブラインドコーナの判定を説明するための車両の走行する道路の模式図。
【図4】走行する道路に対する勾配情報に基づく高さ方向の道路形状を示す図。
【図5】走行する道路に対する曲率情報に基づく水平方向の道路形状を示す図。
【図6】登坂中の自車位置、コーナ開始点、勾配変化点の関係を示す図。
【図7】同じく、登坂中の自車位置、コーナ開始点、勾配変化点の関係を示す図。
【図8】降坂中の自車位置、コーナ開始点、勾配変化点の関係を示す図。
【図9】ブラインドコーナ判定処理を説明するためのフローチャート。
【図10】ブラインドコーナ判定処理を説明するためのフローチャート。
【符号の説明】
【0066】
10…車両支援装置としてのナビゲーション装置、12…自車位置検出手段、判断手段、勾配変化点演算手段、コーナ開始点演算手段、位置判断手段、視認判定及び報知手段としての制御部、20…道路情報記憶手段としての地図データ記憶部、20a…道路情報としての経路データ、22…ディスプレイ、23b…運転者パラメータファイル、25…報知手段を構成するスピーカ、27…自車位置検出手段を構成するVICS受信部、C1…車両、Pa…自車位置、Pb…コーナ開始点、Pc…勾配変化点、h…視線高さ、θ…運転者視角。
【技術分野】
【0001】
本発明は、車両支援方法及び車両支援装置に関する。
【背景技術】
【0002】
従来、自車両の現在地が急カーブなどの減速地点に接近すると、そのカーブへの接近を音声で警告するナビゲーション装置が提案されている(例えば、特許文献1)。
【特許文献1】特開平9−35186号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところが、上記したようナビゲーション装置では、自車両の現在地がカーブから所定距離以内に接近すると常にカーブへの接近を警告するため、運転者が前方のカーブの存在を十分に視認して走行している場合でも警告が行われてしまう。そのため、不要な警告が行われ、運転者にとって煩わしくなる。
【0004】
本発明は、上記問題点に鑑みてなされたものであり、その目的は、視認できないコーナが存在する場合のみ、コーナがある旨を報知して、運転者に的確な道路状況を伝達する車両支援方法及び車両支援装置を提供することにある。
【課題を解決するための手段】
【0005】
請求項1の発明は、車両走行時の車両支援方法において、自車位置から前方へ予め定めた所定距離内にあるコーナ開始点を求めるステップと、前記自車位置から予め定めた前記所定距離内にある勾配変化点を求めるステップと、前記勾配変化点が前記自車位置と前記コーナ開始点の間にある時、前記自車位置から前記コーナ開始点が視認できるかどうか判定するステップと、前記自車位置から前記コーナ開始点が視認できないと判定したとき、運転者に視認できないコーナがある旨を報知するステップとからなる。
【0006】
請求項2の発明は、自車位置を検出する自車位置検出手段と、道路情報を記憶した道路情報記憶手段と、前記道路情報記憶手段に記憶された道路情報中の道路勾配情報から勾配変化点を求める勾配変化点演算手段と、前記道路情報記憶手段に記憶された道路情報からコーナ開始点を求めるコーナ開始点演算手段と、前記自車位置と前記コーナ開始点との間に勾配変化点があるかどうか判断する位置判断手段と、前記自車位置と前記コーナ開始点との間に勾配変化点があるとき、前記自車位置から前記コーナ開始点が視認できないかどうか判定する視認判定手段と、前記自車位置から前記コーナ開始点が視認できないとき、運転者に視認できないコーナがある旨の報知を行う報知手段とを備えた車両支援装置。
【0007】
請求項3の発明は、請求項2に記載の車両支援装置において、前記勾配変化点演算手段は、自車位置から前方へ予め定めた所定距離内にあるコーナ開始点を演算ものであり、前記コーナ開始点演算手段は、同じく自車位置から前方へ予め定めた前記所定距離内にあるコーナ開始点を演算するものである。
【0008】
請求項4の発明は、請求項2又は3に記載の車両支援装置において、前記コーナ開始点は、道路がクロソイド曲線であらわされるときのクロソイド曲線の開始点である。
請求項5の発明は、請求項2又は3に記載の車両支援装置において、前記コーナ開始点は、交差点である。
【0009】
請求項6の発明は、請求項2に記載の車両支援装置において、前記視認判定手段は、自
車位置、運転者の視線高さ、運転者視角、及び、道路情報に基づいて判定する。
【発明の効果】
【0010】
請求項1の発明によれば、勾配変化点の先であって視認できないコーナがあるとき、事前にその旨は報知される。その結果、運転者にとって、必要な場合にのみ、報知されるので、煩わせられることなく運転することができる。
【0011】
請求項2の発明によれば、勾配変化点の先であって視認できないコーナがあるとき、事前にその旨が報知される。その結果、運転者にとって、必要な場合にのみ報知されるので、煩わせられることなく運転することができる。
【0012】
請求項3の発明によれば、車両が予め定めた距離にある勾配変化点の先であって視認できないコーナ開始点があるとき、事前にコーナがある旨が報知されるので、運転者は、勾配変化点の先の視認できないコーナの存在を知ることができ、次の運転操作に対処することができる。
【0013】
請求項4の発明によれば、車両が予め定めた距離内にある勾配変化点の先であって視認できない道路のコーナ開始点があるとき、事前にその旨が報知されるので、運転者は、勾配変化点の先の視認できないコーナの存在を知ることができ、次の運転操作に対処することができる。
【0014】
請求項5の発明によれば、車両が予め定めた距離内にある勾配変化点の先であって視認できない交差点があるとき、事前にその旨が報知されるので、運転者は、勾配変化点の先の視認できない交差点の存在を知ることができ、次の運転操作に対処することができる。
【0015】
請求項6の発明によれば、自車位置、運転者の視線高さ、運転者視角、及び、道路情報に基づいて、自車位置から前記コーナ開始点が視認できないかどうか判定することができる。
【発明を実施するための最良の形態】
【0016】
以下、本発明の車両支援装置を、自動車(車両C1)に搭載され、経路案内を行うナビゲーション装置に具体化した実施形態を図1〜図10に従って説明する。
図1に示すように、ナビゲーション装置10は、制御装置11を備えている。この制御装置11は、主制御を行う制御部12、RAM13、ROM14を備えている。制御部12は、ROM14に格納された経路案内プログラム、ブラインドコーナ判定処理プログラム等、各種プログラムに従って、各種処理を行う。尚、制御部12は、特許請求の範囲に記載の自車位置検出手段、位置判断手段、勾配変化点演算手段、コーナ開始点演算手段、視認判定手段及び報知手段を構成する。
【0017】
また、制御装置11は、自車位置検出手段を構成するGPS受信部15を備えている。GPS受信部15は、GPS衛星からの電波を受信する。制御部12は、GPS受信部15から受信した検出データに基づいて、自車位置の絶対位置を示す緯度・経度・高度等の測位データを定期的に算出する。
【0018】
さらに、制御装置11は、車両側インターフェース部(車両側I/F部16)を備えている。制御部12は、この車両側I/F部16を介して、車両C1に配設された自車位置検出手段を構成する車速センサ17、ジャイロ18及びステアリングセンサ19から車両C1の車速、相対方位、及び舵角検出信号を取得する。制御部12は、車速センサ17及びジャイロ18から、車速及び相対方位を取得して、GPS受信部15による測位データにより算出した基準自車位置をもとに、車速及び相対方位に基づき、自律航法による自車
位置データを生成する。そして、GPS受信部15から測位データを逐次取得しながら、自律航法による自車位置を補正し、自車位置Paを決定する。
【0019】
また、制御装置11は、道路情報記憶手段としての地図データ記憶部20及び描画処理部21を備えている。地図データ記憶部20には、道路情報としての経路データ20a及び地図描画データ20bが格納されている。経路データ20aは、各道路の交差点や曲点を示すノードを示すノードデータや、各ノードを接続するリンクを示すリンクデータ等を格納しており、制御部12は、目的地までの経路案内処理を行う際に、この経路データ20a及びROM14に格納された経路案内プログラムに従って経路を探索する。また、制御部12は、上記したように算出した自車位置データと、走行軌跡、経路データ20aを照合して、自車位置座標を適切な道路上に位置決めし、自車位置データをさらに補正する。
【0020】
また、経路データ20aは、各ノード毎のそのノードにおける勾配(絶対勾配)の勾配情報が付加データとして記憶されている。さらに、経路データ20aは、各ノード毎のそのノードにおける曲率半径を示す曲率情報が付加データとして記憶されている。さらにまた、経路データ20aは、各ノード中にコーナの開始点Pb(クロソイド曲線の開始点)となるノードについて、コーナ開始点情報が付加データとして記憶されている。そして、制御部12は、各ノードの勾配情報に基づいて、走行中の道路において勾配変化点Pcを求めることができるようになっている。また、制御部12は、コーナ開始点情報に基づいて、走行中の道路において道路前方にあるコーナ開始点Pbを求めることができるようになっている。
【0021】
一方、地図描画データ20bは、広範囲から狭範囲の地図を表示するためのデータであって、位置座標、経路データ20aと関連付けられている。
描画処理部21は、制御部12から出力信号や自車位置Paを取得して、自車位置周辺の地図描画データ20bを抽出し、マップマッチングしながらナビゲーション装置10が具備する出力手段及びディスプレイ装置としてのディスプレイ22に出力する。これにより、ディスプレイ22には、地図画面22aと、自車位置マーク22bと、経路指標22cとが表示される。そして、描画処理部21は、車両C1の移動量に従って、地図画面22aを逐次更新する。
【0022】
さらに、制御装置11は、パラメータデータ記憶部23及び音声合成部24を備えている。パラメータデータ記憶部23には、メッセージをスピーカ25から出力するための音声ファイル23aが格納されている。音声合成部24は、制御部12から音声を指定する出力信号を受信すると、指定された音声ファイル23aを抽出、合成及びデジタル/アナログ変換して、スピーカ25から音声を出力する。
【0023】
また、パラメータデータ記憶部23には、運転者パラメータファイル23bが格納されていて、運転者パラメータファイル23bには、ブラインドコーナ判定処理のための視線高さh、運転者視角θ、所定距離L、基準角度θk等のデータが記憶されている。視線高さhは、図2に示すように、運転者が運転座席に座ったときの、路面から運転者の目の位置までの高さである。また、運転者視角θは、図2に示すように、運転者が運転座席に座ったときに、運転者が、上下方向の視認できる角度をいい、本実施形態では最下側を視界最下線Ld、最上側を視界最上線Luと説明の便宜上いう。
【0024】
さらに、制御装置11は、VICS(Vehicle Information and Communication System)受信部27を備えている。VICS受信部27は、ビーコン(光ビーコン、電波ビーコン、FM多重ビーコン等)から道路交通情報VCを受信する。VICS受信部27がビーコンから受信する道路交通情報VC内には、そのビーコンが設置されている位置情報、道
路名等の道路情報、渋滞情報等の交通案内、主要地点までの推定所要時間等が格納されている。
【0025】
また、ナビゲーション装置10のディスプレイ22は、タッチパネルであって、描画処理部21から送信された地図描画データ20bを出力する。さらに、ディスプレイ22は、タッチパネル操作によって入力された入力信号、ナビゲーション装置10に配設された操作ボタン38を押釦することによって入力された入力信号を取得して、制御部12に送信する。
【0026】
次に、上記のように構成したナビゲーション装置10の作用を、制御装置11がブラインドコーナ判定処理プログラムに従った処理動作を示す図9及び図10のフローチャートに従って説明する。
【0027】
説明の便宜上、図3に示す模式図のように、車両C1が、登坂路→降坂路→コーナ路からなる道路100を走行する場合を例にして説明する。また、目的地が設定されその目的地までの経路が探索されその探索された経路(案内経路)に従って車両C1は走行するものとする。
【0028】
まず、制御部12は、パラメータデータ記憶部23の運転者パラメータファイル23bから視線高さh、運転者視角θ、所定距離L、基準角度θk等のデータを取り込み、RAM13に一時記憶する(ステップS1)。続いて、制御部12は、GPS受信部15から受信した検出データに基づく自車位置Paと、地図データ記憶部20に記憶された経路データ20a及び地図描画データ20bとに基づいて、車両C1が案内経路上に位置(マップマッチング)しているかどうか判断する(ステップS2)。即ち、制御部12は、経路案内プログラムに基づいて、自車位置と経路データ20aに基づいてディスプレイ22に現在地周辺の地図画面22aを表示しその地図画面22a上の道路(案内経路)に自車位置マーク22bを表示されるように、マップマッチングされているかどうか判断する。そして、例えば、経路データ20aに無い道路または場所にある場合には(ステップS2でNO)、制御部12は車両C1が経路データ20aにある道路に位置するまで待つ。車両C1が案内経路上を走行していると判断すると(ステップS2でYES)、制御部12は、GPS受信部15から受信した検出データに基づいて自車位置Paを検出する(ステップS3)。
【0029】
続いて、制御部12は、自車位置Paから前方へ予め定めた所定距離L(例えば200m)内にある勾配情報を取得する(ステップS4)。つまり、制御部12は、所定距離L(例えば200m)内に含まれる複数のノードを経路データ20aから特定し、その特定したノードに対する勾配(絶対勾配)の勾配情報を読出してRAM13に一時記憶する。
【0030】
次に、制御部12は、同じく自車位置Paから前記所定距離L内にある各ノードの曲率情報を取得する(ステップS5)。つまり、制御部12は、ステップS4で特定したノードに対する曲率情報を読出してRAM13に一時記憶する。このとき、制御部12は、コーナ開始点Pbを含むノードがある場合に、曲率情報とともに合わせてコーナ開始点Pbのコーナ開始点情報をRAM13に記憶するようになっている。
【0031】
所定距離Lにある各ノードの各々について、勾配情報、曲率情報、コーナ開始点情報を取得すると、制御部12は、所定距離L内にある各ノードに中に、勾配変化点Pcとなるノードがあるかどうか判断する(ステップS6)。制御部12は、各ノードの各々についての勾配(絶対勾配)の勾配情報に基づいて、上り(登坂路)から下り(降坂路)になる地点、又は、下り(降坂路)から上り(登坂路)になる地点(勾配変化点Pc)となるノードがあるかどうか判断する。そして、所定距離L内において勾配変化点Pcとなるノー
ドがある場合(ステップS6でYES)は、制御部12は、ステップS7に移る。尚、所定距離Lにおいて勾配変化点Pcとなるノードがない場合(ステップS6でNO)は、制御部12は、ステップS2に戻り、勾配変化点Pcとなるノードが現れるまで前記と同様な処理を繰り返す。
【0032】
ステップS7において、制御部12は、所定距離L内にある各ノードの中に、コーナ開始点情報を持ったノードがあるかどうか判断する。そして、コーナ開始点Pbを持ったノードがある場合(ステップS7でYES)、制御部12は、勾配変化点Pcが自車位置Paとコーナ開始点Pbとの間にあるかどうか判断する(ステップS8)。
【0033】
このとき、図3の模式図に示すように、車両C1が、登坂路を走行し、やがて降坂路となって、所定距離L内にコーナ開始点Pbがある地点(自車位置Pa)に到達したとする。尚、図4は、図3の示す道路100に対する勾配情報に基づく高さ方向の道路形状における自車位置Pa、コーナ開始点Pb、勾配変化点Pcを示す。尚、図4は、自車位置Paと勾配変化点Pcとを結ぶ線を垂直に通る面に対して道路100が投影されて現れる道路形状とする。また、図5は、図3の示す道路100に対する曲率情報に基づく水平方向の道路形状における自車位置Pa、コーナ開始点Pb、勾配変化点Pcを示す。
【0034】
従って、この場合、制御部12は、勾配変化点Pcが自車位置Paとコーナ開始点Pbとの間にあると判断して(ステップS8でYES)、ステップS9に移る。尚、勾配変化点Pcが自車位置Paとコーナ開始点Pbとの間にないと判断すると(ステップS8でNO)、制御部12は、ステップS2に戻る。
【0035】
ステップS9において、制御部12は車両C1が登坂路を走行しているかどうか判断する。このとき、制御部12は、ステップS4で取得したノードの勾配情報に基づいて車両C1が登坂路を走行しているかどうか判断する。そして、この場合、図3で示したように、登坂路を走行しているので(ステップS9でYES)、制御部12はステップS10に移る。
【0036】
ステップS10において、制御部12は、自車位置Pa、勾配変化点Pc、及び、ステップS1で取り込んだ視線高さhと運転者視角θとで、運転席から運転者視角θで勾配変化点Pcを運転者が視認できるかどうか判断する。つまり、図6に示す座標系(図4と同じ座標系)において、自車位置Paにおいて視線高さhから道路100に接する視認限界接線L1を引き、視認限界接線L1と道路100が接する地点Pdを求める。次に、制御部12は、その求めた地点Pdが勾配変化点Pcより手前にあるかどうかを判断することによって、勾配変化点Pcを運転者が視認できるかどうか判断する。
【0037】
そして、制御部12は、例えば図7に示すように、地点Pdが勾配変化点Pcより後方にある場合には、勾配変化点Pcが視認できると判断する(ステップS10でYES)。反対に、制御部12は、図6に示すように、地点Pdが勾配変化点Pcより手前にある場合には、勾配変化点Pcが視認できないと判断する(ステップS10でNO)。
【0038】
そして、勾配変化点Pcが視認できると判断すると(ステップS10でYES)、制御部12は、図7に示すように、ステップS10で求めた視認限界接線L1を第1運転者視認線Lx1とする(ステップS11)。また、勾配変化点Pcが視認できないと判断すると(ステップS10でNO)、制御部12は、図6に示す座標系において、自車位置Paにおいて視線高さhから運転者視角θを設定したときの視界最下線Ldを、第2運転者視認線Lx2とする(ステップS12)。
【0039】
ステップS11又はステップS12において、第1運転者視認線Lx1又は第2運転者
視認線Lx2が求まると、制御部12は誤差角度θxの算出を行う。誤差角度θxは、第2運転者視認線Lx2にあっては、図6に示すように、同第2運転者視認線Lx2と、コーナ開始点Pbと勾配変化点Pcを結ぶ直線Lx3とのなす角度をいう。また、誤差角度θxは、第1運転者視認線Lx1にあっては、同様に、同第1運転者視認線Lx1対する、コーナ開始点Pbと勾配変化点Pcを結ぶ直線Lx3とのなす角度をいう。尚、制御部12は、まず、図6に示す座標系におけるコーナ開始点Pbと勾配変化点Pcを結ぶ直線Lx3を、コーナ開始点Pbと勾配変化点Pcの経路データ20aに基づいて演算することができる。そして、制御部12は、求めた直線Lx3と第1運転者視認線Lx1又は第2運転者視認線Lx2とのなす誤差角度θxを算出する。
【0040】
誤差角度θxを算出すると、制御部12は、誤差角度θxが予め定めた基準角度θkを超えた値かどうか判断する(ステップS14)。基準角度θkは、コーナ開始点Pbが勾配変化点Pcの近くにあったとき、登坂路の勾配が緩やかなとき、数m進むとそのコーナ開始点Pbが視認できるような場合があり、これを排除するための角度である。従って、誤差角度θxが基準角度θk以下の場合には、制御部12はコーナ開始点Pbが勾配変化点Pcの近くにあったり、登坂路の勾配が緩やかであったりして数m進むとそのコーナ開始点Pbが視認できるものと判定し(ステップS14でNO)、ステップS2に戻る。
【0041】
一方、誤差角度θxが基準角度θkを超えていると(ステップS14でYES)、制御部12は、勾配変化点Pcの先の降坂路に見えないコーナ開始点Pbがある、即ちブラインドコーナがあると判定し、その旨をスピーカ25を介して音声で報知して終了する。
【0042】
従って、運転者は、登坂中に、勾配変化点Pcの先であって比較的近い(200m先の)降坂路の位置に視認できないコーナ(コーナ開始点Pb)があることを事前に知ることができる。しかも、コーナ開始点Pbが近づくたびにスピーカ25を介して音声で報知されるのではなく、コーナ開始点Pbの手前に勾配変化点Pcが存在する場合に限ってスピーカ25を介して音声で報知するようにしたので、運転者は無用な音声報知に煩わされることはない。
【0043】
また、車両C1が定速走行制御装置で、運転者が設定した走行速度で走行制御されているとき、登坂中に、見えないコーナ開始点Pb(ブラインドコーナ)が近づくことによって、車速が落されるとき、コーナ開始点Pbが近づいたことを報知させることができる。そのため、運転者は、定速走行モードで走行しているにもかかわらず、登坂中に、速度変化が生じても理由が認識できるため違和感なく対応することができる。
【0044】
一方、ステップS9において、降坂路を走行していると判断すると(ステップS9でNO)、制御部12はステップS17に移る。ステップS17において、制御部12は、視認可能
範囲Mを算出する。
【0045】
制御部12による視認可能範囲Mの算出は、以下のように行う。図8は、図4及び図6と同様に、走行中の道路100に対する勾配情報に基づく高さ方向の道路形状を示す。図8に示すように、自車位置Pa、視線高さhと運転者視角θとで、自車位置Paにおいて、運転席から運転者視角θで運転者が視認できる範囲を、視界最下線Ldと視界最上線Luを使って求める。詳述すると、制御に12は、視界最下線Ldと道路100が交差する地点P1、視界最上線Luと道路100が交差する地点P2をそれぞれ求める。この場合、降坂路なので、地点P1からの地点P2の道路区間が、運転者が視認できる範囲(視認可能範囲M)となる。
【0046】
視認可能範囲Mを算出すると、制御部12は、視認可能範囲M内にコーナ開始点Pbが
含まれてないかどうか判断する(ステップS17)。そして、視認可能範囲M内にコーナ開始点Pbが含まれていると(ステップS17でNO)、制御部12はコーナ開始点Pbが視認できるとして、ステップS2に戻る。
【0047】
反対に視認可能範囲M内にコーナ開始点Pbが含まれてないと(ステップS17でYES)、制御部12は、ステップS15に移り、勾配変化点Pcの先の登坂路に見えないコーナ開始点Pbがある、即ちブラインドコーナがあると判定し、その旨をスピーカ25を介して音声で報知して終了する。
【0048】
従って、降坂中においても、勾配変化点Pcの先であって比較的近い(200m先の)降坂路の位置に視認できないコーナ(コーナ開始点Pb)があることを事前に知ることができる。しかも、コーナ開始点Pbが近づくたびにスピーカ25を介して音声で報知されるのではなく、コーナ開始点Pbの手前に勾配変化点Pcが存在する場合に限ってスピーカ25を介して音声で報知するようにしたので、運転者は無用な音声報知に煩わされることはない。
【0049】
また、車両C1が定速走行制御装置で、運転者が設定した走行速度で走行制御されているとき、降坂中に、見えないコーナ開始点Pb(ブラインドコーナ)が近づくことによって、車速が落されるとき、コーナ開始点Pbが近づいたことを報知させることができる。そのため、運転者は、定速走行モードで走行しているにもかかわらず、降坂中に、速度変化が生じても理由が認識できるため違和感なく対応することができる。
【0050】
上記実施形態によれば、以下のような効果を得ることができる。
(1)上記実施形態では、走行中において勾配変化点Pcの先であって比較的近い位置(所定距離L)に視認できないコーナ開始点Pbがあると、事前に音声でその旨は報知されるので、運転者は、勾配変化点Pcの前で勾配変化点Pcの先の視認できないコーナ開始点Pbの存在を知ることができ、次の運転操作に対処することができる。しかも、定速走行制御装置で、定速走行モードで走行しているとき、視認できないコーナ開始点Pbによる速度変化が生じても理由が認識できるため違和感なく対応することができる。
【0051】
(2)上記実施形態では、コーナ開始点Pbが近づくたびにスピーカ25を介して音声で報知されるのではなく、コーナ開始点Pbの手前に勾配変化点Pcが存在する場合に限ってスピーカ25を介して音声で報知するようにしたので、運転者は無用な音声報知に煩わされることはない。
【0052】
(3)上記実施形態では、地図データ記憶部20に記憶した経路データ20aの各ノードに絶対勾配の勾配情報を付加したので、制御部12は、各ノードに付加した勾配情報を見るだけで簡単かつ短時間に勾配変化点Pcを求めることができる。
【0053】
尚、上記各実施形態は以下のように変更してもよい。
・上記実施形態では、コーナ開始点Pbを、道路100の形状(クロソイド曲線)のカーブの開始点とした。これを、探索して設定した目的地までの案内経路に従って走行している場合に、勾配変化点Pcの先に交差点がありその交差点を右折又は左折する案内経路の場合には、その交差点(右折地点又は左折地点)をコーナ開始点Pbとしてコーナ開始情報としてノードに付加して、勾配変化点Pcの先の視認できないコーナ(右折地点又は左折地点)がある旨の報知をするようにしてもよい。
【0054】
・さらに、右折又は左折する交差点に関係なく、勾配変化点Pcの先に交差点がある場合に、その交差点をコーナ開始点Pbとしてコーナ開始情報としてノードに付加して、勾配変化点Pcの先の視認できないコーナ(交差点)がある旨の報知をするようにしてもよ
い。
【0055】
・さらにまた、勾配変化点Pcの先に信号機がある場合に、その信号機をコーナ開始点Pbとしてコーナ開始情報としてノードに付加して、勾配変化点Pcの先の視認できないコーナ(信号機)がある旨の報知をするようにしてもよい。
【0056】
つまり、特許請求の請求範囲で記載された運転者が視認できないコーナは、道路形状のカーブに限定されず、運転者が視認できなくて報知する必要がある地点であればよく、上記した設定された目的地までの案内経路における右折地点又は左折地点、交差点、信号機も含むものである。
【0057】
・上記実施形態では、探索して設定した目的地までの案内経路に従って走行している場合について説明した。目的地までの案内経路を設定しないで、ディスプレイ22に、地図画面22aと、自車位置マーク22bが表示されている状態で走行している場合でも、勾配変化点Pcの先の視認できないコーナ開始点Pbを判定するようにして実施してもよい。
【0058】
・上記実施形態では、パラメータデータ記憶部23の運転者パラメータファイル23bに記憶した視線高さh、運転者視角θのデータを特に限定しなかったが、例えば、複数に運転者に対する視線高さh、運転者視角θが予め記憶されていて、それを、運転者が選択できるようにしてもよい。
【0059】
・上記実施形態では、パラメータデータ記憶部23の運転者パラメータファイル23bに記憶した所定距離L、基準角度θk等のデータを特に限定しなかったが、これを、例えば、所定距離Lを100m又は150mと、基準角度θkを例えば0度といったように適宜変更したり又は選択したりできるように実施してもよい。
【0060】
・上記実施形態では、地図データ記憶部20に経路データ20a及び地図描画データ20bが予め格納されたナビゲーション装置10に具体化した。これを、例えば、携帯電話網等のネットワークを介して管理センタからその時々に必要な経路データ20a及び地図描画データ20bを取得するナビゲーション装置(車両支援装置)に応用してもよい。
【0061】
・上記実施形態では、経路案内を行うナビゲーション装置10に具体化したが、経路案内を省略した装置(車両支援装置)としてもよい。この場合、地図データ記憶部20の地図描画データ20bが省略される。
【0062】
・上記実施形態では、ブラインドコーナの判定結果を音声で報知したが、ディスプレイ22にその旨を単独または音声とともに表示するようにして実施してもよい。
・上記実施形態では、各ノードに付加した絶対勾配の勾配情報に基づいて勾配変化点Pcを求めたが、各ノードの高さ(標高)データに基づいて勾配を計算して勾配変化点Pcを求めるようにしてもよい。
【0063】
・上記実施形態では、各ノードに付加したコーナ開始点情報に基づいてコーナ開始点Pbを求めたが、各ノードの座標データに基づいて曲率情報を求め、その曲率情報に基づいてコーナ開始点Pbを求めるようにしてもよい。
【0064】
・上記実施形態において、ステップS6の勾配変化点Pcの存在の判定と、ステップS7のコーナ開始点Pbの存在の判定との処理順番を、逆に行ってもよい。
・上記実施形態において、登坂路におけるコーナ開始点Pbの視認の有無判定を、ステップS10からステップS15に示す処理で行ったが、これに限定されるものではなく、
要は勾配変化点Pcの先にあるコーナ開始点Pbが視認できるがどうかが判定できればよくその他の算出方法で実施してもよい。
【図面の簡単な説明】
【0065】
【図1】本実施形態のナビゲーション装置の構成を説明する電気ブロック図。
【図2】視線高さ及び運転者視角を説明するための図。
【図3】ブラインドコーナの判定を説明するための車両の走行する道路の模式図。
【図4】走行する道路に対する勾配情報に基づく高さ方向の道路形状を示す図。
【図5】走行する道路に対する曲率情報に基づく水平方向の道路形状を示す図。
【図6】登坂中の自車位置、コーナ開始点、勾配変化点の関係を示す図。
【図7】同じく、登坂中の自車位置、コーナ開始点、勾配変化点の関係を示す図。
【図8】降坂中の自車位置、コーナ開始点、勾配変化点の関係を示す図。
【図9】ブラインドコーナ判定処理を説明するためのフローチャート。
【図10】ブラインドコーナ判定処理を説明するためのフローチャート。
【符号の説明】
【0066】
10…車両支援装置としてのナビゲーション装置、12…自車位置検出手段、判断手段、勾配変化点演算手段、コーナ開始点演算手段、位置判断手段、視認判定及び報知手段としての制御部、20…道路情報記憶手段としての地図データ記憶部、20a…道路情報としての経路データ、22…ディスプレイ、23b…運転者パラメータファイル、25…報知手段を構成するスピーカ、27…自車位置検出手段を構成するVICS受信部、C1…車両、Pa…自車位置、Pb…コーナ開始点、Pc…勾配変化点、h…視線高さ、θ…運転者視角。
【特許請求の範囲】
【請求項1】
車両走行時の車両支援方法において、
自車位置から前方へ予め定めた所定距離内にあるコーナ開始点を求めるステップと、
前記自車位置から予め定めた前記所定距離内にある勾配変化点を求めるステップと、
前記勾配変化点が前記自車位置と前記コーナ開始点の間にある時、前記自車位置から前記コーナ開始点が視認できるかどうか判定するステップと、
前記自車位置から前記コーナ開始点が視認できないと判定したとき、運転者に視認できないコーナがある旨を報知するステップと
からなる車両支援方法。
【請求項2】
自車位置を検出する自車位置検出手段と、
道路情報を記憶した道路情報記憶手段と、
前記道路情報記憶手段に記憶された道路情報中の道路勾配情報から勾配変化点を求める勾配変化点演算手段と、
前記道路情報記憶手段に記憶された道路情報からコーナ開始点を求めるコーナ開始点演算手段と、
前記自車位置と前記コーナ開始点との間に勾配変化点があるかどうか判断する位置判断手段と、
前記自車位置と前記コーナ開始点との間に勾配変化点があるとき、前記自車位置から前記コーナ開始点が視認できないかどうか判定する視認判定手段と、
前記自車位置から前記コーナ開始点が視認できないとき、運転者に視認できないコーナがある旨の報知を行う報知手段と
を備えることを特徴とする車両支援装置。
【請求項3】
請求項2に記載の車両支援装置において、
前記勾配変化点演算手段は、自車位置から前方へ予め定めた所定距離内にあるコーナ開始点を演算ものであり、
前記コーナ開始点演算手段は、同じく自車位置から前方へ予め定めた前記所定距離内にあるコーナ開始点を演算するものであることを特徴とする車両支援装置。
【請求項4】
請求項2又は3に記載の車両支援装置において、
前記コーナ開始点は、道路がクロソイド曲線であらわされるときのクロソイド曲線の開始点であることを特徴とする車両支援装置。
【請求項5】
請求項2又は3に記載の車両支援装置において、
前記コーナ開始点は、交差点であることを特徴とする車両支援装置。
【請求項6】
請求項2に記載の車両支援装置において、
前記視認判定手段は、自車位置、運転者の視線高さ、運転者視角、及び、道路情報に基づいて判定することを特徴とする車両支援装置。
【請求項1】
車両走行時の車両支援方法において、
自車位置から前方へ予め定めた所定距離内にあるコーナ開始点を求めるステップと、
前記自車位置から予め定めた前記所定距離内にある勾配変化点を求めるステップと、
前記勾配変化点が前記自車位置と前記コーナ開始点の間にある時、前記自車位置から前記コーナ開始点が視認できるかどうか判定するステップと、
前記自車位置から前記コーナ開始点が視認できないと判定したとき、運転者に視認できないコーナがある旨を報知するステップと
からなる車両支援方法。
【請求項2】
自車位置を検出する自車位置検出手段と、
道路情報を記憶した道路情報記憶手段と、
前記道路情報記憶手段に記憶された道路情報中の道路勾配情報から勾配変化点を求める勾配変化点演算手段と、
前記道路情報記憶手段に記憶された道路情報からコーナ開始点を求めるコーナ開始点演算手段と、
前記自車位置と前記コーナ開始点との間に勾配変化点があるかどうか判断する位置判断手段と、
前記自車位置と前記コーナ開始点との間に勾配変化点があるとき、前記自車位置から前記コーナ開始点が視認できないかどうか判定する視認判定手段と、
前記自車位置から前記コーナ開始点が視認できないとき、運転者に視認できないコーナがある旨の報知を行う報知手段と
を備えることを特徴とする車両支援装置。
【請求項3】
請求項2に記載の車両支援装置において、
前記勾配変化点演算手段は、自車位置から前方へ予め定めた所定距離内にあるコーナ開始点を演算ものであり、
前記コーナ開始点演算手段は、同じく自車位置から前方へ予め定めた前記所定距離内にあるコーナ開始点を演算するものであることを特徴とする車両支援装置。
【請求項4】
請求項2又は3に記載の車両支援装置において、
前記コーナ開始点は、道路がクロソイド曲線であらわされるときのクロソイド曲線の開始点であることを特徴とする車両支援装置。
【請求項5】
請求項2又は3に記載の車両支援装置において、
前記コーナ開始点は、交差点であることを特徴とする車両支援装置。
【請求項6】
請求項2に記載の車両支援装置において、
前記視認判定手段は、自車位置、運転者の視線高さ、運転者視角、及び、道路情報に基づいて判定することを特徴とする車両支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2006−308331(P2006−308331A)
【公開日】平成18年11月9日(2006.11.9)
【国際特許分類】
【出願番号】特願2005−128540(P2005−128540)
【出願日】平成17年4月26日(2005.4.26)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成18年11月9日(2006.11.9)
【国際特許分類】
【出願日】平成17年4月26日(2005.4.26)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]