
車両方位補正システム
【課題】方位を適切に補正することが可能な「車両方位補正システム」を提供する。
【解決手段】車両方位補正システム100−1は、車両の近傍範囲と、該近傍範囲よりも遠方の遠方範囲とを周期的に撮影するカメラ102と、車度を検出する車速センサ108と、車両の角度変化を検出するジャイロセンサ110と、撮影タイミングの異なる2つの近傍範囲の画像の相関、及び、撮影タイミングの異なる2つの遠方範囲の画像の相関と、車速とに基づいて、車両が停止、回転及び走行のいずれかの状態であるかを判定し、回転及び走行のいずれかの状態である場合に、車両の角度変化に基づいて、車両の方位を補正する仮判定部104及び判定・補正部112とを有する。
【解決手段】車両方位補正システム100−1は、車両の近傍範囲と、該近傍範囲よりも遠方の遠方範囲とを周期的に撮影するカメラ102と、車度を検出する車速センサ108と、車両の角度変化を検出するジャイロセンサ110と、撮影タイミングの異なる2つの近傍範囲の画像の相関、及び、撮影タイミングの異なる2つの遠方範囲の画像の相関と、車速とに基づいて、車両が停止、回転及び走行のいずれかの状態であるかを判定し、回転及び走行のいずれかの状態である場合に、車両の角度変化に基づいて、車両の方位を補正する仮判定部104及び判定・補正部112とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の方位を補正する車両方位補正システムに関する。
【背景技術】
【0002】
従来のカーナビゲーションシステムは、車速センサによって検出される車速が0であり、且つ、エンジンが作動して電源が供給されている場合には、車両が停止していると判定し、その間のジャイロセンサからの出力を誤差とみなして、当該ジャイロセンサからの出力に基づく車両方位の補正を行わないという、いわゆるゼロ点補正が採用されている。
【0003】
しかしながら、駐車場に設置されたターンテーブルに車両が配置された場合等、エンジンが作動し、カーナビゲーションシステムに電源が供給されている状態で、車両が停止しつつ回転するような場合、回転により車両の方位が変化しているにも関わらず、カーナビゲーションシステムは、その間のジャイロセンサからの出力を全て誤差とみなして、ゼロ点補正を行ってしまうため、車両の方位に誤差が生じることになる。
【0004】
このような問題に対して、特許文献1に記載された技術は、車両に設置したカメラによって周期的に撮影された画像の一致の度合いにより、車両の回転を認識し、回転している場合には補正を行う。
【特許文献1】特開2002−188931号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載された技術は、カーナビゲーションシステム等への電源が断たれてから再度電源が投入されるまでの間に車両が180°回転する場合にのみ、適切な方位に補正することができるものであり、昨今増加している、駐車場形状に合わせて任意角度に回転するターンテーブルに車両が配置された場合には、適切な方位補正ができない。
【0006】
本発明の目的は、上述した課題を解決するものであり、方位を適切に補正することが可能な車両方位補正システムを提供するものである。
【課題を解決するための手段】
【0007】
本発明は、車両の方位を補正する車両方位補正システムであって、前記車両の近傍の第1の範囲と、該第1の範囲よりも遠方の第2の範囲とを周期的に撮影する撮影手段と、前記車両の速度を検出する車速検出手段と、前記撮影手段の撮影により得られた撮影タイミングの異なる2つの第1の範囲の画像の相関、及び、撮影タイミングの異なる2つの第2の範囲の画像の相関と、前記車速検出手段により検出された車両の速度とに基づいて、前記車両が停止、回転及び走行のいずれかの状態であるかを判定する車両状態判定手段と、前記車両の角度変化を検出する角度変化検出手段と、前記車両状態判定手段により前記車両が回転及び走行のいずれかの状態であると判定された場合に、前記角度変化検出手段により検出された車両の角度変化に基づいて、前記車両の方位を補正する方位補正手段とを有することを特徴とする。
【0008】
この構成によれば、周期的な撮影によって得られた車両の近傍及び遠方の画像のそれぞれの相関と、車速との双方を考慮することによって、車両の状態、具体的には、停止、回転、走行のいずれかの状態であるかを適切に判定することができ、車両が回転及び走行のいずれかの状態であれば、ゼロ点補正を行うことなく、ジャイロセンサ等の角度変化検出手段によって検出された車両の角度変化に基づいて、方位が適切に補正される。
【0009】
同様の観点から、本発明の車両方位補正システムは、前記車両状態判定手段が、前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値以上であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値以上であって、且つ、前記車両の速度が0である場合に、前記車両が停止の状態であると判定し、前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値以上であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値未満であって、且つ、前記車両の速度が0である場合に、前記車両が回転の状態であると判定し、前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値未満であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値未満であって、且つ、前記車両の速度が0でない場合に、前記車両が走行の状態であると判定するようにしてもよい。
【0010】
また、本発明の車両方位補正システムは、前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値未満であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値未満であって、且つ、前記車両の速度が0である場合と、前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値以上であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値以上であって、且つ、前記車両の速度が0でない場合とにおいて、所定の警告を提示する警告提示手段を有するようにしてもよい。
【0011】
この構成によれば、画像の相関と車両の速度との間に矛盾が生じる場合、具体的には、画像の相関のみによれば車両が走行していると判断されるが、車両の速度が0である場合、あるいは、画像の相関のみによれば車両が停止していると判断されるが、車両の速度が0でない場合には、撮影手段又は車速検出手段に異常が生じたものとみなして、ユーザに対してその旨の警告を行うことができる。
【0012】
また、本発明の車両方位補正システムは、前記車両状態判定手段が、前記撮影手段が複数の撮影ユニットにより構成される場合に、前記撮影ユニット毎に、該撮影ユニットの撮影により得られた撮影タイミングの異なる2つの第1の範囲の画像の相関、及び、撮影タイミングの異なる2つの第2の範囲の画像の相関と、前記車速検出手段により検出された車両の速度とに基づいて、前記車両の状態を判定し、前記方位補正手段が、前記車両状態判定手段により前記撮影ユニット毎に判定された車両の状態が回転及び走行のいずれかで一致する場合にのみ、前記角度変化検出手段により検出された車両の角度変化に基づいて、前記車両の方位を補正するようにしてもよい。
【0013】
この構成によれば、複数の撮影ユニットによって撮影された画像を車両状態の判定に用いることで、より適切な車両状態の判定が可能となる。
【0014】
また、本発明の車両方位補正システムは、前記撮影手段の撮影により得られた撮影タイミングの異なる2つの第2の範囲の画像のうち、一方の第2の範囲の画像内の第1の領域を選択し、他方の第2の範囲の画像内において前記一方の第2の範囲の画像内の第1の領域に含まれる画像との相関が第3の閾値以上である画像を含む第2の領域を検出し、前記一方の第2の範囲の画像内における第1の領域の位置と、前記他方の第2の範囲の画像内における第2の領域の位置との差に基づいて、前記車両の角度変化を算出する角度変化算出手段を有し、前記方位補正手段が、前記車両状態判定手段により前記車両が回転の状態であると判定された場合に、前記角度変化算出手段により算出された車両の角度変化に基づいて、前記車両の方位を補正するようにしてもよい。
【0015】
この構成によれば、車両が回転する場合には、撮影タイミングの異なる2つの画像のそれぞれにおいて、同一の撮影対象物の領域の位置、換言すれば、相関の高い領域の位置が変化することに鑑みて、撮影タイミングの異なる2つの画像のそれぞれにおいて、相関の高い領域を探し出し、その領域の位置の差を車両の角度変化に換算して、方位の補正を行うことで、適切な補正が可能となる。
【0016】
また、本発明の車両方位補正システムは、前記角度変化算出手段は、前記撮影手段が複数の撮影ユニットにより構成される場合に、前記撮影ユニット毎に、該撮影ユニットの撮影により得られた撮影タイミングの異なる2つの第2の範囲の画像のうち、一方の第2の範囲の画像内の第1の領域を選択し、他方の第2の範囲の画像内において前記一方の第2の範囲の画像内の第1の領域に含まれる画像との相関が第3の閾値以上である画像を含む第2の領域を検出し、前記一方の第2の範囲の画像内における第1の領域の位置と、前記他方の第2の範囲の画像内における第2の領域の位置との差に基づいて、前記車両の角度変化を算出し、前記撮影ユニット毎に検出された車両の角度変化の平均値を最終的な前記車両の角度変化として算出するようにしてもよい。
【0017】
この構成によれば、複数の撮影ユニットによって撮影された画像を車両の角度変化の算出に用いることで、より適切な角度変化の導出が可能となる。
【0018】
また、本発明の車両方位補正システムは、前記角度変化検出手段により検出された車両の角度変化と、前記角度変化算出手段により算出された車両の角度変化とに応じて定められる補正値を用いて、前記角度変化検出手段により検出された車両の角度変化を補正する角度変化補正手段を有し、前記方位補正手段が、前記車両状態判定手段により前記車両が回転及び走行のいずれかの状態であると判定された場合に、前記角度変化補正手段による補正後の前記車両の角度変化に基づいて、前記車両の方位を補正するようにしてもよい。
【0019】
角度変化検出手段が、例えばカーナビゲーションシステム内のジャイロセンサである場合には、カーナビゲーションシステムが車両に搭載されてからの期間が短い場合、学習機能による誤差の解消が不十分なため、検出される車両の角度変化に誤差が生じることがあるが、この構成によれば、その誤差を適切に解消することができる。
【0020】
また、本発明の車両方位補正システムは、前記車両の加速度を検出する加速度検出手段と、前記角度変化検出手段により検出された車両の角度変化と、前記角度変化算出手段により算出された車両の角度変化とに応じて定められる補正値を用いて、前記加速度検出手段により検出された車両の加速度を補正するようにしてもよい。
【0021】
加速度検出手段が、例えばカーナビゲーションシステム内の加速度センサである場合には、カーナビゲーションシステムが車両に搭載されてからの期間が短い場合、学習機能による誤差の解消が不十分なため、検出される加速度に誤差が生じることがあるが、この構成によれば、その誤差を適切に解消することができる。
【発明の効果】
【0022】
本発明によれば、周期的な撮影によって得られた車両の近傍及び遠方の画像のそれぞれの相関と、車速との双方を考慮することによって、車両の状態を適切に判定することができ、更にその車両の状態に応じて、車両の角度変化に基づく方位の補正を適切に行うことができる。
【発明を実施するための最良の形態】
【0023】
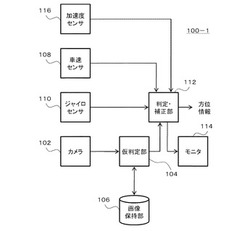
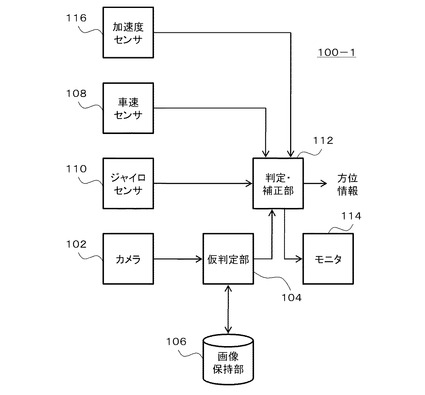
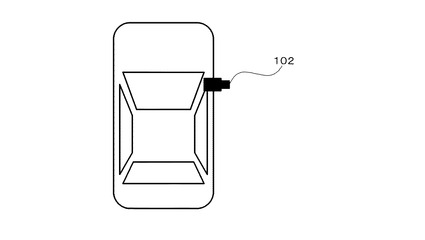
以下、本発明の実施の形態について、図面を参照して具体的に説明する。図1は、本発明が適用された車両方位補正システムの第1の構成を示す図である。図1に示す車両方位補正システム100−1は、車両に搭載されたカーナビゲーションシステムの内部に構成されるものであり、撮影手段に対応するカメラ102と、車両状態判定手段及び角度変化算出手段に対応する仮判定部104と、画像保持部106と、車速検出手段に対応する車速センサ108と、角度変化検出手段に対応するジャイロセンサ110と、車両状態判定手段、方位補正手段、警告提示手段、角度変化補正手段及び加速度補正手段に対応する判定・補正部112と、モニタ114と、加速度検出手段に対応する加速度センサ116とにより構成される。これらのうち、カメラ102は、例えば、図2に示すように、車両の側面部(例えば、ドアミラーの取り付け部分)に搭載されている。
【0024】
車両方位補正システム100−1は、カメラ102によって異なる撮影タイミングで撮影された画像の相関と、車速センサ108によって検出された車両の速度とに基づいて、車両の状態を判定し、その判定結果に応じ、ジャイロセンサ110によって検出された車両の角度変化に基づいて、車両の方位を補正する。以下、フローチャートを参照しつつ、車両方位補正システム100−1による方位補正動作について説明する。
【0025】
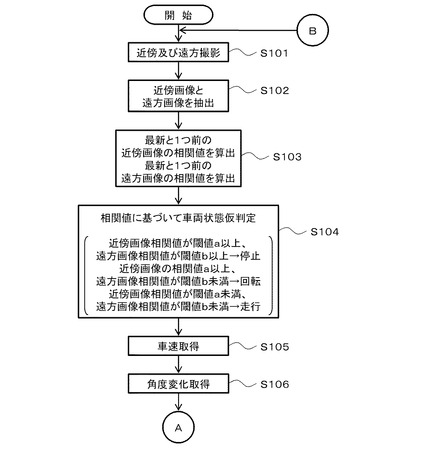
図3及び図4は、車両方位補正システム100−1による方位補正動作を示すフローチャートである。車両のエンジンが作動して車両方位補正システム100−1を含むカーナビゲーションシステムに電源が供給されている状態において、カメラ102は、第1の範囲である車両の近傍の範囲(例えば、車両から10cm以内の範囲)と、当該第1の範囲よりも遠方である第2の範囲である遠方の範囲(たとえば、車両から1.5m以上離れた範囲)との双方を同時に撮影する(S101)。なお、カメラ102は、方位補正のために専用に設けられたものでなくてもよく、車両周辺を撮影して運転者に障害物を認識させるためのカメラと共用でもよい。撮影によって得られた画像データは、所定の時間周期でサンプリングされ、撮影日時が付加された上で仮判定部104へ送られる。
【0026】
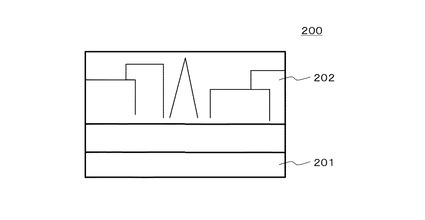
仮判定部104は、カメラ102からの画像を取得すると、当該画像のうち、近傍範囲に対応する画像(近傍画像)と遠方範囲に対応する画像(遠方画像)とを抽出する(S102)。具体的には、仮判定部104は、画像における近傍範囲の領域の情報と遠方範囲の領域の情報とを保持しており、これら領域の情報に基づいて、カメラ102からの画像における、近傍範囲と遠方範囲とを特定する。図5は、カメラ102による撮影画像の一例である。図5に示す画像200においては、下部の所定範囲の領域が近傍範囲の領域201であり、上部の所定範囲の領域が遠方範囲の領域202である。そして、仮判定部104は、カメラ102からの画像のうち、これら近傍範囲と遠方範囲のそれぞれに対応する画像を抽出する。
【0027】
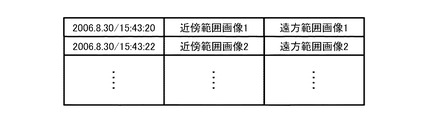
次に、仮判定部104は、S102にて抽出した最新の近傍画像と、1つ前の近傍画像との相関値(近傍画像相関値)を算出するとともに、S102にて抽出した最新の遠方画像と、1つ前の遠方画像との相関値(遠方画像相関値)を算出する(S103)。過去の近傍画像及び遠方画像は、画像保持部106に保持されている。図6は、画像保持部106に保持されている画像データの一例を示す図である。図6に示すように、画像データは、撮影日時、近傍範囲画像及び遠方範囲画像の各情報を対応付けて構成される。なお、画像保持部106は、必ずしも過去の全ての近傍画像及び遠方画像に対応する画像データを保持する必要はなく、少なくとも1つ前の近傍画像及び遠方画像に対応する画像データを保持していればよい。
【0028】
相関値の算出は、例えば、以下のようにして行われる。すなわち、仮判定部104は、最新の近傍画像と、1つ前の近傍画像のそれぞれにおける同一の位置の画素を選択し、その同一位置の画素値の差を算出する。そして、仮判定部104は、画像の全ての位置の画素について算出した画素値の差を集計し、その逆数を近傍画像相関値とする。同様に、仮判定部104は、最新の遠方画像と、1つ前の遠方画像のそれぞれにおける同一の位置の画素を選択し、その同一位置の画素値の差を算出する。そして、仮判定部104は、画像の全ての位置の画素について算出した画素値の差を集計し、その逆数を遠方画像相関値とする。なお、相関値は、周知の様々な手法によって算出可能である。
【0029】
次に、仮判定部104は、算出した近傍画像相関値及び遠方画像相関値に基づいて、車両の状態の仮判定を行う(S104)。具体的には、仮判定部104は、近傍画像相関値と予め定められた閾値aとを比較するとともに、遠方画像相関値と予め定められた閾値bとを比較する。
【0030】
そして、仮判定部104は、近傍画像相関値が閾値a以上であり、且つ、遠方画像相関値が閾値b以上である場合、換言すれば、近傍画像と遠方画像の双方の時間的変化が小さい場合には、車両が停止している状態であるとの仮判定を行う。また、仮判定部104は、近傍画像相関値が閾値a以上であり、且つ、遠方画像相関値が閾値b未満である場合、換言すれば、近傍画像の時間的変化は小さいが、遠方画像の時間的変化が大きい場合には、車両が駐車場のターンテーブル等に配置されて回転している状態(方位のみ変化している状態)であるとの仮判定を行う。この仮判定は、車両がターンテーブル等に配置されて回転している状態では、ターンテーブルを撮影対象物とした近傍画像は変化せず、遠方画像のみが変化することに基づく。また、仮判定部104は、近傍画像相関値が閾値a未満であり、且つ、遠方画像相関値が閾値b未満である場合、換言すれば、近傍画像と遠方画像の双方の時間的変化が大きい場合には、車両が走行している状態であるとの仮判定を行う。
【0031】
仮判定部104は、このようにして求めた仮判定の結果を、判定・補正部112へ送る。また、仮判定部104は、S102において抽出した近傍画像及び遠方画像と撮影日時とを対応付けた画像データを画像保持部106に保持させる。ここで保持された画像データ内の近傍画像及び遠方画像は、次の方位補正動作において、1つ前の近傍画像及び遠方画像として用いられる。
【0032】
判定・補正部112は、仮判定結果を取得すると、車速センサ108によって検出される最新の車両の速度(車速)を取得する。(S105)。ジャイロセンサ110は、上述したカメラ102による画像出力と同一の時間周期で車両の角度を検出し、その都度、検出した最新の車両の角度と1つ前に検出した車両の角度との差を角度変化として判定・補正部112へ出力する。判定・補正部112は、このジャイロセンサ110から送られる最新の車両の角度変化を取得する(S106)。
【0033】
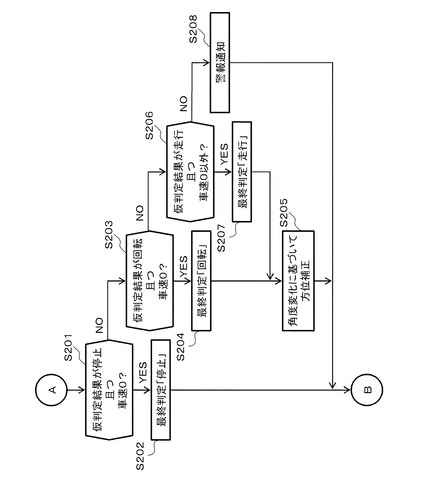
その後、図4に示す動作に移行し、判定・補正部112は、仮判定結果が停止であり、且つ、車速が0であるか否かを判定する(S201)。仮判定結果が停止、且つ、車速が0を満たす場合には、判定・補正部112は、最終的な車両状態の判定結果を停止であるとする(S202)。この場合には、ジャイロセンサ110によって検出される最新の車両の角度変化に基づく車両の方位補正は行われずに(ゼロ点補正)、次の方位補正動作に移行し、再び、図3のS101におけるカメラ102による撮影以降の動作が繰り返される。
【0034】
一方、仮判定結果が停止、且つ、車速が0を満たさない場合には、次に、判定・補正部112は、仮判定結果が回転であり、且つ、車速が0であるか否かを判定する(S203)。仮判定結果が回転、且つ、車速が0を満たす場合には、判定・補正部112は、最終的な車両状態の判定結果を回転であるとする(S204)。この場合には、判定・補正部112は、S106において取得した車両の角度変化に基づいて、車両の方位を補正する(S205)。
【0035】
具体的には、判定・補正部112は、その時点で設定されている車両の方位から角度変化分だけ変化した方位を補正後の車両の方位とする。補正により得られた新たな方位の情報は、例えば、ナビゲーションシステム内で車両位置を検出する車両位置検出部(図示せず)へ出力される。その後は、次の方位補正動作に移行し、再び、図3のS101におけるカメラ102による撮影以降の動作が繰り返される。
【0036】
一方、仮判定結果が回転、且つ、車速が0を満たさない場合には、次に、判定・補正部112は、仮判定結果が走行であり、且つ、車速が0以外であるか否かを判定する(S206)。仮判定結果が走行、且つ、車速が0以外を満たす場合には、判定・補正部112は、最終的な車両状態の判定結果を走行であるとする(S207)。この場合には、判定・補正部112は、S106において取得した角度変化に基づいて、車両の方位を補正し、その方位情報を出力する(S205)。その後は、次の方位補正動作に移行し、再び、図3のS101におけるカメラ102の撮影以降の動作が繰り返される。
【0037】
一方、仮判定結果が走行、且つ、車速が0以外を満たさない場合には、仮判定結果が停止であるにもかかわらず、車速が0以外である場合、仮判定結果が回転であるにもかかわらず、車速が0以外である場合、及び、仮判定結果が走行であるにもかかわらず、車速が0である場合のいずれかであり、仮判定結果と車速との間に矛盾が生じているということである。この場合、判定・補正部112は、カメラ102又は車速センサ108に異常が生じたとみなして、モニタ114にその旨を表示させる等、警報通知を行う(S208)。なお、仮判定結果が回転、車速が0以外である場合には、警報通知は行われなくてもよい。その後は、次の方位補正動作に移行し、再び、図3のS101におけるカメラ102による撮影以降の動作が繰り返される。
【0038】
このように、車両方位補正システム100−1は、カメラ102による周期的な撮影によって得られた車両の近傍及び遠方の画像のそれぞれの相関と、車速センサ108によって検出された車速との双方を考慮することによって、車両が停止、回転、走行のいずれかの状態であるかを適切に判定することができる。更には、車両方位補正システム100−1は、その車両の状態が停止であれば、車両の方位を補正せず、回転及び走行のいずれかの状態であれば、ジャイロセンサ110によって検出された車両の角度変化に基づいて、車両の方位を補正することにより、方位が適切を補正することができる。
【0039】
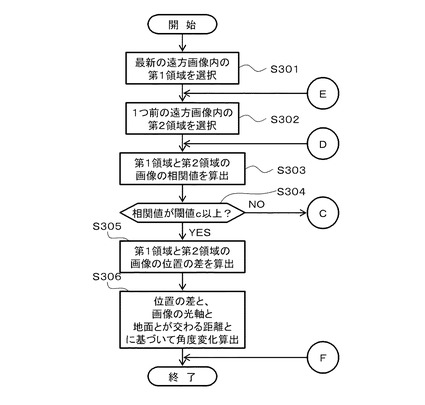
なお、車両の角度変化は、カメラ102によって撮影された画像に基づいて算出することもできる。図7及び図8は、車両方位補正システム100−1による角度変化算出動作を示すフローチャートである。仮判定部104は、図3のS102において、カメラ102からの画像から抽出した最新の遠方画像における所定の領域(第1領域)を選択するとともに(S301)、画像保持部106に保持されている1つ前の遠方画像における所定の領域(第2領域)を選択する(S302)。ここで、第1領域と第2領域は、同一の形状及び同一の面積である。
【0040】
次に、仮判定部104は、S301にて選択した第1領域に含まれる画像と、S302にて選択した第2領域に含まれる画像との相関値を算出する(S303)。ここで、相関値は、周知の様々な手法によって算出可能である。更に、仮判定部104は、算出した相関値が予め定められた閾値c以上であるか否かを判定する(S304)。そして、相関値が閾値c以上である場合、換言すれば、第1領域に含まれる画像と、第2領域に含まれる画像とが近似している場合には、最新の遠方画像における第1領域の位置と1つ前の遠方画像における第2領域の位置との差を算出する(S305)。
【0041】
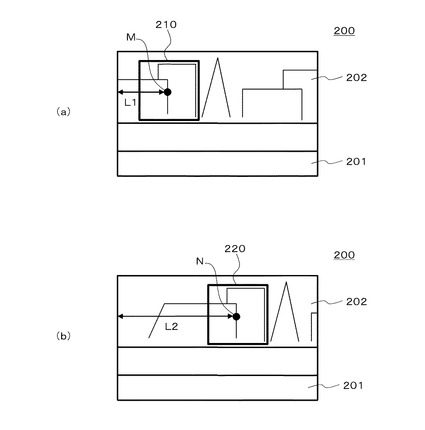
図9は、領域の位置の差の算出の一例を示す図である。図9(a)は、最新の画像200であり、遠方画像202において第1領域210が選択されている。一方、図9(b)は、1つ前の画像200であり、遠方画像202において第2領域220が選択されている。これら、第1領域210に含まれる画像と第2領域に含まれる画像とは、近似しており、相関値は閾値c以上である。
【0042】
このような場合、仮判定部104は、図9(a)の最新の画像200における、第1領域210の中心Mの座標(画像200の左端からの距離がL1)と、図9(b)の1つ前の画像200における、第2領域220の中心Nの座標(画像200の左端からの距離がL2)との差(L2−L1)を、最新の遠方画像200における第1領域210の位置と1つ前の遠方画像200における第2領域220の位置との差として算出する。
【0043】
次に、仮判定部104は、算出した最新の遠方画像における第1領域の位置と1つ前の遠方画像における第2領域の位置との差と、画像の光軸と地面が交わる距離とに基づいて、車両の角度変化を算出する(S306)。画像の光軸と地面が交わる距離は、カメラ102の設置位置及び撮影方向により一意に決定されるものであり、この画像の光軸と地面が交わる距離によって、第1領域と第2領域との位置の差を車両の角度変化に換算する際の係数が決定される。このようにして算出された車両の角度変化は、判定・補正部112へ送られる。この場合、判定・補正部112は、図3のS106におけるジャイロセンサ110からの車両の角度変化を取得しなくても、仮判定部104によって算出された車両の角度変化を取得することにより、図4のS205における、車両の角度変化に基づく方位補正を行うことができる。
【0044】
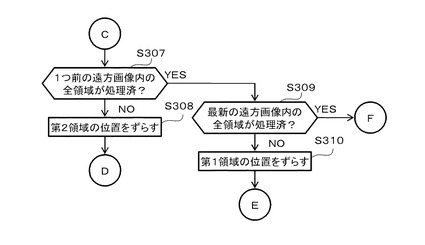
一方、S304において、相関値が閾値c未満である場合、換言すれば、第1領域に含まれる画像と、第2領域に含まれる画像とが近似していない場合には、図8に示す動作に移行し、仮判定部104は、S301にて一度、第1領域を選択した後において、1つ前の遠方画像の全領域についてS303及びS304の処理がなされたか否かを判定する(S307)。そして、1つ前の遠方画像において未処理の領域が存在する場合には、仮判定部104は、その時点で選択されている第2領域の位置を所定量ずらした新たな第2領域を選択し(S308)、S303における第1領域と第2領域の画像の相関値の算出以降の動作を繰り返す。
【0045】
一方、1つ前の遠方画像において未処理の領域が存在しない場合には、仮判定部104は、最新の遠方画像の全領域についてS302以降の処理がなされたか否かを判定する(S309)。そして、最新の遠方画像において未処理の領域が存在する場合には、仮判定部104は、その時点で選択されている第1領域の位置を所定量ずらした新たな第1領域を選択し(S310)、S302における第2領域の選択以降の動作を繰り返す。また、最新の遠方画像において未処理の領域が存在しない場合には、一連の動作を終了する。この場合には、車両の角度変化は算出されないことになる。
【0046】
また、上述した図7及び図8に示す手順によって、仮判定部104により車両の角度変化が算出される場合には、その車両の角度変化に基づいて、ジャイロセンサ110によって検出される車両の角度変化を補正するようにしてもよい。
【0047】
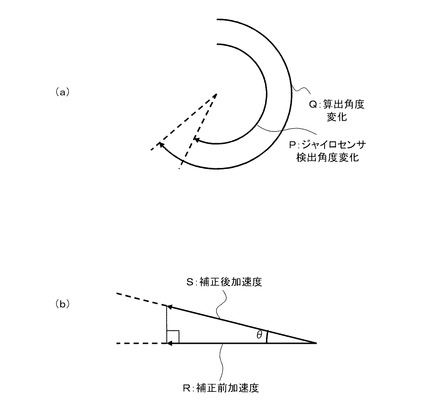
図10(a)に示すように、ジャイロセンサ110によって検出される車両の角度変化がPであり、仮判定部104により算出された角度変化がQである場合、判定・補正部112は、補正係数TをT=Q/Pにより算出する。その後、判定・補正部112は、ジャイロセンサ110によって検出される車両の角度変化を取得すると、その取得した角度変化に補正係数Tを乗じた値を車両の角度変化として算出し、図4のS205における方位補正に用いる。
【0048】
更に、この補正係数Tを用いて、判定・補正部112は、加速度116によって検出される加速度を補正するようにしてもよい。具体的には、判定・補正部112は、加速度センサ116によって検出される加速度(補正前加速度)Rを取得すると、補正後の加速度SをS=R×Tにより算出する。この算出式は、以下のようにして得られる。すなわち、図10(b)に示すように、補正前加速度Rと補正後加速度Sとのなす角をθとすると、S=R/cosθであり、近似式T≒1/cosθを用いることにより、S=R×Tとなる。
【0049】
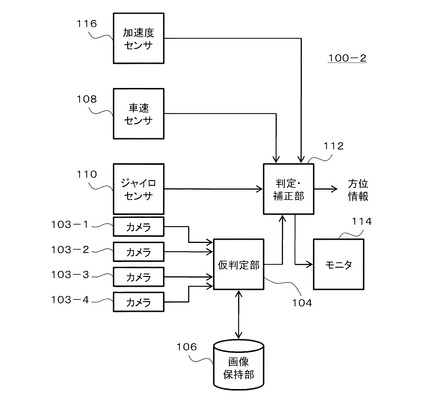
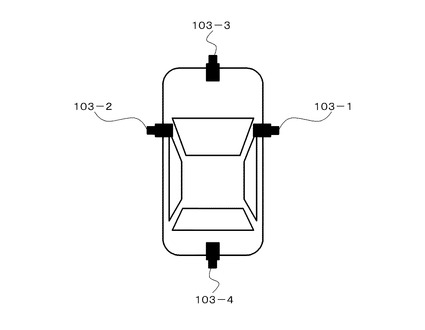
また、複数のカメラを用いて撮影が行われるようにしてもよい。図11は、本発明が適用された車両方位補正システムの第2の構成を示す図である。図11に示す車両方位補正システム100−2は、図1に示す車両方位補正システム100−1と比較すると、カメラ102に代えて、それぞれが撮影ユニットに対応する4台のカメラ103−1乃至103−4を有する。これらカメラ103−1乃至103−4(以下、これらをまとめて適宜「カメラ103」と称する)は、例えば、図12に示すように、車両の両側面部と、前部及び後部に搭載されている。
【0050】
車両方位補正システム100−2において、各カメラ103は、近傍範囲及び遠方範囲の双方を同時に撮影しており、この撮影によって得られた画像データは、所定の時間周期でサンプリングされ、撮影日時とカメラ103の識別情報が付加された上で仮判定部104へ送られる。
【0051】
仮判定部104は、各カメラ103からの画像を取得すると、これらカメラ103毎に、当該カメラ103からの画像について、近傍画像と遠方画像とを抽出する。更に、仮判定部104は、抽出した最新の近傍画像と同一の識別情報が付加された1つ前の近傍画像を画像保持部106から取得し、これら近傍画像の相関値を算出する。同様に、仮判定部104は、抽出した最新の遠方画像と同一の識別情報が付加された1つ前の遠方画像を画像保持部106から取得し、これら遠方画像の相関値を算出する。
【0052】
このようにして、カメラ103毎に近傍画像相関値及び遠方画像相関値が算出されると、仮判定部104は、カメラ103毎に、当該カメラ103に対応する近傍画像相関値及び遠方画像相関値に基づいて、車両状態の仮判定を行う。具体的な手順は、図3のS104と同様であり、仮判定の結果は、判定・補正部112へ送られる。
【0053】
判定・補正部112は、カメラ103毎の仮判定結果が全て回転で一致し、且つ、車速センサ108から取得した車速が0である場合にのみ、最終的な車両状態の判定結果を回転であるとし、ジャイロセンサ110から取得した角度変化に基づいて、車両の方位補正を行う。また、判定・補正部112は、カメラ103毎の仮判定結果が全て走行で一致し、且つ、車速センサ108から取得した車速が0以外である場合にのみ、最終的な車両状態の判定結果を走行であるとし、ジャイロセンサ110から取得した角度変化に基づいて、車両の方位補正を行う。
【0054】
また、車両方位補正システム100−2において、各カメラ103によって撮影された画像に基づいて車両の角度変化が算出されるようにしてもよい。この場合、仮判定部104は、各カメラ103からの画像毎に、図7におけるS301乃至S306の動作を行い、角度変化を算出する。このようにしてカメラ103毎に角度変化を算出すると、次に、仮判定部104は、そのカメラ103毎の角度変化の平均値を算出し、判定・補正部112へ出力する。判定・補正部112は、この角度変化の平均値を、仮判定部104によって算出された角度変化として用いることにより、上述したような車両の方位補正や、ジャイロセンサ110によって検出される車両の角度変化の補正、加速度センサ116によって検出される車両の加速度の補正を行う。
【0055】
また、近傍範囲を撮影するカメラと遠方範囲を撮影するカメラとを別々に設けてもよい。この場合には、仮判定部104は、図3のS102に示す近傍画像及び遠方画像の抽出を行わず、近傍範囲を撮影するカメラの撮影によって得られた近傍画像と、遠方範囲を撮影するカメラの撮影によって得られた遠方画像とを、そのまま相関値の算出(図3のS103)に用いる。なお、本発明は、上述した実施の形態に限定されるものではなく、必要に応じて種々の変更が可能である。
【産業上の利用可能性】
【0056】
以上、説明したように、本発明に係る車両方位補正システムは、方位を適切に補正することができ、車両方位補正システムとして有用である。
【図面の簡単な説明】
【0057】
【図1】車両方位補正システムの第1の構成を示す図である。
【図2】カメラの配置の第1の例を示す図である。
【図3】方位補正動作を示す第1のフローチャートである。
【図4】方位補正動作を示す第2のフローチャートである。
【図5】撮影画像の一例を示す図である。
【図6】画像データの一例を示す図である。
【図7】角度変化算出動作を示す第1のフローチャートである。
【図8】角度変化算出動作を示す第2のフローチャートである。
【図9】領域の位置の差の算出の一例を示す図である。
【図10】角度変化及び加速度の補正を説明する図である。
【図11】車両方位補正システムの第1の構成を示す図である。
【図12】カメラの配置の第2の例を示す図である。
【符号の説明】
【0058】
100−1、100−2 車両方位補正システム
102、103−1、103−2、103−3、103−4 カメラ
104 仮判定部
106 画像保持部
108 車速センサ
110 ジャイロセンサ
112 判定・補正部
114 モニタ
116 加速度センサ
【技術分野】
【0001】
本発明は、車両の方位を補正する車両方位補正システムに関する。
【背景技術】
【0002】
従来のカーナビゲーションシステムは、車速センサによって検出される車速が0であり、且つ、エンジンが作動して電源が供給されている場合には、車両が停止していると判定し、その間のジャイロセンサからの出力を誤差とみなして、当該ジャイロセンサからの出力に基づく車両方位の補正を行わないという、いわゆるゼロ点補正が採用されている。
【0003】
しかしながら、駐車場に設置されたターンテーブルに車両が配置された場合等、エンジンが作動し、カーナビゲーションシステムに電源が供給されている状態で、車両が停止しつつ回転するような場合、回転により車両の方位が変化しているにも関わらず、カーナビゲーションシステムは、その間のジャイロセンサからの出力を全て誤差とみなして、ゼロ点補正を行ってしまうため、車両の方位に誤差が生じることになる。
【0004】
このような問題に対して、特許文献1に記載された技術は、車両に設置したカメラによって周期的に撮影された画像の一致の度合いにより、車両の回転を認識し、回転している場合には補正を行う。
【特許文献1】特開2002−188931号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載された技術は、カーナビゲーションシステム等への電源が断たれてから再度電源が投入されるまでの間に車両が180°回転する場合にのみ、適切な方位に補正することができるものであり、昨今増加している、駐車場形状に合わせて任意角度に回転するターンテーブルに車両が配置された場合には、適切な方位補正ができない。
【0006】
本発明の目的は、上述した課題を解決するものであり、方位を適切に補正することが可能な車両方位補正システムを提供するものである。
【課題を解決するための手段】
【0007】
本発明は、車両の方位を補正する車両方位補正システムであって、前記車両の近傍の第1の範囲と、該第1の範囲よりも遠方の第2の範囲とを周期的に撮影する撮影手段と、前記車両の速度を検出する車速検出手段と、前記撮影手段の撮影により得られた撮影タイミングの異なる2つの第1の範囲の画像の相関、及び、撮影タイミングの異なる2つの第2の範囲の画像の相関と、前記車速検出手段により検出された車両の速度とに基づいて、前記車両が停止、回転及び走行のいずれかの状態であるかを判定する車両状態判定手段と、前記車両の角度変化を検出する角度変化検出手段と、前記車両状態判定手段により前記車両が回転及び走行のいずれかの状態であると判定された場合に、前記角度変化検出手段により検出された車両の角度変化に基づいて、前記車両の方位を補正する方位補正手段とを有することを特徴とする。
【0008】
この構成によれば、周期的な撮影によって得られた車両の近傍及び遠方の画像のそれぞれの相関と、車速との双方を考慮することによって、車両の状態、具体的には、停止、回転、走行のいずれかの状態であるかを適切に判定することができ、車両が回転及び走行のいずれかの状態であれば、ゼロ点補正を行うことなく、ジャイロセンサ等の角度変化検出手段によって検出された車両の角度変化に基づいて、方位が適切に補正される。
【0009】
同様の観点から、本発明の車両方位補正システムは、前記車両状態判定手段が、前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値以上であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値以上であって、且つ、前記車両の速度が0である場合に、前記車両が停止の状態であると判定し、前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値以上であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値未満であって、且つ、前記車両の速度が0である場合に、前記車両が回転の状態であると判定し、前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値未満であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値未満であって、且つ、前記車両の速度が0でない場合に、前記車両が走行の状態であると判定するようにしてもよい。
【0010】
また、本発明の車両方位補正システムは、前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値未満であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値未満であって、且つ、前記車両の速度が0である場合と、前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値以上であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値以上であって、且つ、前記車両の速度が0でない場合とにおいて、所定の警告を提示する警告提示手段を有するようにしてもよい。
【0011】
この構成によれば、画像の相関と車両の速度との間に矛盾が生じる場合、具体的には、画像の相関のみによれば車両が走行していると判断されるが、車両の速度が0である場合、あるいは、画像の相関のみによれば車両が停止していると判断されるが、車両の速度が0でない場合には、撮影手段又は車速検出手段に異常が生じたものとみなして、ユーザに対してその旨の警告を行うことができる。
【0012】
また、本発明の車両方位補正システムは、前記車両状態判定手段が、前記撮影手段が複数の撮影ユニットにより構成される場合に、前記撮影ユニット毎に、該撮影ユニットの撮影により得られた撮影タイミングの異なる2つの第1の範囲の画像の相関、及び、撮影タイミングの異なる2つの第2の範囲の画像の相関と、前記車速検出手段により検出された車両の速度とに基づいて、前記車両の状態を判定し、前記方位補正手段が、前記車両状態判定手段により前記撮影ユニット毎に判定された車両の状態が回転及び走行のいずれかで一致する場合にのみ、前記角度変化検出手段により検出された車両の角度変化に基づいて、前記車両の方位を補正するようにしてもよい。
【0013】
この構成によれば、複数の撮影ユニットによって撮影された画像を車両状態の判定に用いることで、より適切な車両状態の判定が可能となる。
【0014】
また、本発明の車両方位補正システムは、前記撮影手段の撮影により得られた撮影タイミングの異なる2つの第2の範囲の画像のうち、一方の第2の範囲の画像内の第1の領域を選択し、他方の第2の範囲の画像内において前記一方の第2の範囲の画像内の第1の領域に含まれる画像との相関が第3の閾値以上である画像を含む第2の領域を検出し、前記一方の第2の範囲の画像内における第1の領域の位置と、前記他方の第2の範囲の画像内における第2の領域の位置との差に基づいて、前記車両の角度変化を算出する角度変化算出手段を有し、前記方位補正手段が、前記車両状態判定手段により前記車両が回転の状態であると判定された場合に、前記角度変化算出手段により算出された車両の角度変化に基づいて、前記車両の方位を補正するようにしてもよい。
【0015】
この構成によれば、車両が回転する場合には、撮影タイミングの異なる2つの画像のそれぞれにおいて、同一の撮影対象物の領域の位置、換言すれば、相関の高い領域の位置が変化することに鑑みて、撮影タイミングの異なる2つの画像のそれぞれにおいて、相関の高い領域を探し出し、その領域の位置の差を車両の角度変化に換算して、方位の補正を行うことで、適切な補正が可能となる。
【0016】
また、本発明の車両方位補正システムは、前記角度変化算出手段は、前記撮影手段が複数の撮影ユニットにより構成される場合に、前記撮影ユニット毎に、該撮影ユニットの撮影により得られた撮影タイミングの異なる2つの第2の範囲の画像のうち、一方の第2の範囲の画像内の第1の領域を選択し、他方の第2の範囲の画像内において前記一方の第2の範囲の画像内の第1の領域に含まれる画像との相関が第3の閾値以上である画像を含む第2の領域を検出し、前記一方の第2の範囲の画像内における第1の領域の位置と、前記他方の第2の範囲の画像内における第2の領域の位置との差に基づいて、前記車両の角度変化を算出し、前記撮影ユニット毎に検出された車両の角度変化の平均値を最終的な前記車両の角度変化として算出するようにしてもよい。
【0017】
この構成によれば、複数の撮影ユニットによって撮影された画像を車両の角度変化の算出に用いることで、より適切な角度変化の導出が可能となる。
【0018】
また、本発明の車両方位補正システムは、前記角度変化検出手段により検出された車両の角度変化と、前記角度変化算出手段により算出された車両の角度変化とに応じて定められる補正値を用いて、前記角度変化検出手段により検出された車両の角度変化を補正する角度変化補正手段を有し、前記方位補正手段が、前記車両状態判定手段により前記車両が回転及び走行のいずれかの状態であると判定された場合に、前記角度変化補正手段による補正後の前記車両の角度変化に基づいて、前記車両の方位を補正するようにしてもよい。
【0019】
角度変化検出手段が、例えばカーナビゲーションシステム内のジャイロセンサである場合には、カーナビゲーションシステムが車両に搭載されてからの期間が短い場合、学習機能による誤差の解消が不十分なため、検出される車両の角度変化に誤差が生じることがあるが、この構成によれば、その誤差を適切に解消することができる。
【0020】
また、本発明の車両方位補正システムは、前記車両の加速度を検出する加速度検出手段と、前記角度変化検出手段により検出された車両の角度変化と、前記角度変化算出手段により算出された車両の角度変化とに応じて定められる補正値を用いて、前記加速度検出手段により検出された車両の加速度を補正するようにしてもよい。
【0021】
加速度検出手段が、例えばカーナビゲーションシステム内の加速度センサである場合には、カーナビゲーションシステムが車両に搭載されてからの期間が短い場合、学習機能による誤差の解消が不十分なため、検出される加速度に誤差が生じることがあるが、この構成によれば、その誤差を適切に解消することができる。
【発明の効果】
【0022】
本発明によれば、周期的な撮影によって得られた車両の近傍及び遠方の画像のそれぞれの相関と、車速との双方を考慮することによって、車両の状態を適切に判定することができ、更にその車両の状態に応じて、車両の角度変化に基づく方位の補正を適切に行うことができる。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施の形態について、図面を参照して具体的に説明する。図1は、本発明が適用された車両方位補正システムの第1の構成を示す図である。図1に示す車両方位補正システム100−1は、車両に搭載されたカーナビゲーションシステムの内部に構成されるものであり、撮影手段に対応するカメラ102と、車両状態判定手段及び角度変化算出手段に対応する仮判定部104と、画像保持部106と、車速検出手段に対応する車速センサ108と、角度変化検出手段に対応するジャイロセンサ110と、車両状態判定手段、方位補正手段、警告提示手段、角度変化補正手段及び加速度補正手段に対応する判定・補正部112と、モニタ114と、加速度検出手段に対応する加速度センサ116とにより構成される。これらのうち、カメラ102は、例えば、図2に示すように、車両の側面部(例えば、ドアミラーの取り付け部分)に搭載されている。
【0024】
車両方位補正システム100−1は、カメラ102によって異なる撮影タイミングで撮影された画像の相関と、車速センサ108によって検出された車両の速度とに基づいて、車両の状態を判定し、その判定結果に応じ、ジャイロセンサ110によって検出された車両の角度変化に基づいて、車両の方位を補正する。以下、フローチャートを参照しつつ、車両方位補正システム100−1による方位補正動作について説明する。
【0025】
図3及び図4は、車両方位補正システム100−1による方位補正動作を示すフローチャートである。車両のエンジンが作動して車両方位補正システム100−1を含むカーナビゲーションシステムに電源が供給されている状態において、カメラ102は、第1の範囲である車両の近傍の範囲(例えば、車両から10cm以内の範囲)と、当該第1の範囲よりも遠方である第2の範囲である遠方の範囲(たとえば、車両から1.5m以上離れた範囲)との双方を同時に撮影する(S101)。なお、カメラ102は、方位補正のために専用に設けられたものでなくてもよく、車両周辺を撮影して運転者に障害物を認識させるためのカメラと共用でもよい。撮影によって得られた画像データは、所定の時間周期でサンプリングされ、撮影日時が付加された上で仮判定部104へ送られる。
【0026】
仮判定部104は、カメラ102からの画像を取得すると、当該画像のうち、近傍範囲に対応する画像(近傍画像)と遠方範囲に対応する画像(遠方画像)とを抽出する(S102)。具体的には、仮判定部104は、画像における近傍範囲の領域の情報と遠方範囲の領域の情報とを保持しており、これら領域の情報に基づいて、カメラ102からの画像における、近傍範囲と遠方範囲とを特定する。図5は、カメラ102による撮影画像の一例である。図5に示す画像200においては、下部の所定範囲の領域が近傍範囲の領域201であり、上部の所定範囲の領域が遠方範囲の領域202である。そして、仮判定部104は、カメラ102からの画像のうち、これら近傍範囲と遠方範囲のそれぞれに対応する画像を抽出する。
【0027】
次に、仮判定部104は、S102にて抽出した最新の近傍画像と、1つ前の近傍画像との相関値(近傍画像相関値)を算出するとともに、S102にて抽出した最新の遠方画像と、1つ前の遠方画像との相関値(遠方画像相関値)を算出する(S103)。過去の近傍画像及び遠方画像は、画像保持部106に保持されている。図6は、画像保持部106に保持されている画像データの一例を示す図である。図6に示すように、画像データは、撮影日時、近傍範囲画像及び遠方範囲画像の各情報を対応付けて構成される。なお、画像保持部106は、必ずしも過去の全ての近傍画像及び遠方画像に対応する画像データを保持する必要はなく、少なくとも1つ前の近傍画像及び遠方画像に対応する画像データを保持していればよい。
【0028】
相関値の算出は、例えば、以下のようにして行われる。すなわち、仮判定部104は、最新の近傍画像と、1つ前の近傍画像のそれぞれにおける同一の位置の画素を選択し、その同一位置の画素値の差を算出する。そして、仮判定部104は、画像の全ての位置の画素について算出した画素値の差を集計し、その逆数を近傍画像相関値とする。同様に、仮判定部104は、最新の遠方画像と、1つ前の遠方画像のそれぞれにおける同一の位置の画素を選択し、その同一位置の画素値の差を算出する。そして、仮判定部104は、画像の全ての位置の画素について算出した画素値の差を集計し、その逆数を遠方画像相関値とする。なお、相関値は、周知の様々な手法によって算出可能である。
【0029】
次に、仮判定部104は、算出した近傍画像相関値及び遠方画像相関値に基づいて、車両の状態の仮判定を行う(S104)。具体的には、仮判定部104は、近傍画像相関値と予め定められた閾値aとを比較するとともに、遠方画像相関値と予め定められた閾値bとを比較する。
【0030】
そして、仮判定部104は、近傍画像相関値が閾値a以上であり、且つ、遠方画像相関値が閾値b以上である場合、換言すれば、近傍画像と遠方画像の双方の時間的変化が小さい場合には、車両が停止している状態であるとの仮判定を行う。また、仮判定部104は、近傍画像相関値が閾値a以上であり、且つ、遠方画像相関値が閾値b未満である場合、換言すれば、近傍画像の時間的変化は小さいが、遠方画像の時間的変化が大きい場合には、車両が駐車場のターンテーブル等に配置されて回転している状態(方位のみ変化している状態)であるとの仮判定を行う。この仮判定は、車両がターンテーブル等に配置されて回転している状態では、ターンテーブルを撮影対象物とした近傍画像は変化せず、遠方画像のみが変化することに基づく。また、仮判定部104は、近傍画像相関値が閾値a未満であり、且つ、遠方画像相関値が閾値b未満である場合、換言すれば、近傍画像と遠方画像の双方の時間的変化が大きい場合には、車両が走行している状態であるとの仮判定を行う。
【0031】
仮判定部104は、このようにして求めた仮判定の結果を、判定・補正部112へ送る。また、仮判定部104は、S102において抽出した近傍画像及び遠方画像と撮影日時とを対応付けた画像データを画像保持部106に保持させる。ここで保持された画像データ内の近傍画像及び遠方画像は、次の方位補正動作において、1つ前の近傍画像及び遠方画像として用いられる。
【0032】
判定・補正部112は、仮判定結果を取得すると、車速センサ108によって検出される最新の車両の速度(車速)を取得する。(S105)。ジャイロセンサ110は、上述したカメラ102による画像出力と同一の時間周期で車両の角度を検出し、その都度、検出した最新の車両の角度と1つ前に検出した車両の角度との差を角度変化として判定・補正部112へ出力する。判定・補正部112は、このジャイロセンサ110から送られる最新の車両の角度変化を取得する(S106)。
【0033】
その後、図4に示す動作に移行し、判定・補正部112は、仮判定結果が停止であり、且つ、車速が0であるか否かを判定する(S201)。仮判定結果が停止、且つ、車速が0を満たす場合には、判定・補正部112は、最終的な車両状態の判定結果を停止であるとする(S202)。この場合には、ジャイロセンサ110によって検出される最新の車両の角度変化に基づく車両の方位補正は行われずに(ゼロ点補正)、次の方位補正動作に移行し、再び、図3のS101におけるカメラ102による撮影以降の動作が繰り返される。
【0034】
一方、仮判定結果が停止、且つ、車速が0を満たさない場合には、次に、判定・補正部112は、仮判定結果が回転であり、且つ、車速が0であるか否かを判定する(S203)。仮判定結果が回転、且つ、車速が0を満たす場合には、判定・補正部112は、最終的な車両状態の判定結果を回転であるとする(S204)。この場合には、判定・補正部112は、S106において取得した車両の角度変化に基づいて、車両の方位を補正する(S205)。
【0035】
具体的には、判定・補正部112は、その時点で設定されている車両の方位から角度変化分だけ変化した方位を補正後の車両の方位とする。補正により得られた新たな方位の情報は、例えば、ナビゲーションシステム内で車両位置を検出する車両位置検出部(図示せず)へ出力される。その後は、次の方位補正動作に移行し、再び、図3のS101におけるカメラ102による撮影以降の動作が繰り返される。
【0036】
一方、仮判定結果が回転、且つ、車速が0を満たさない場合には、次に、判定・補正部112は、仮判定結果が走行であり、且つ、車速が0以外であるか否かを判定する(S206)。仮判定結果が走行、且つ、車速が0以外を満たす場合には、判定・補正部112は、最終的な車両状態の判定結果を走行であるとする(S207)。この場合には、判定・補正部112は、S106において取得した角度変化に基づいて、車両の方位を補正し、その方位情報を出力する(S205)。その後は、次の方位補正動作に移行し、再び、図3のS101におけるカメラ102の撮影以降の動作が繰り返される。
【0037】
一方、仮判定結果が走行、且つ、車速が0以外を満たさない場合には、仮判定結果が停止であるにもかかわらず、車速が0以外である場合、仮判定結果が回転であるにもかかわらず、車速が0以外である場合、及び、仮判定結果が走行であるにもかかわらず、車速が0である場合のいずれかであり、仮判定結果と車速との間に矛盾が生じているということである。この場合、判定・補正部112は、カメラ102又は車速センサ108に異常が生じたとみなして、モニタ114にその旨を表示させる等、警報通知を行う(S208)。なお、仮判定結果が回転、車速が0以外である場合には、警報通知は行われなくてもよい。その後は、次の方位補正動作に移行し、再び、図3のS101におけるカメラ102による撮影以降の動作が繰り返される。
【0038】
このように、車両方位補正システム100−1は、カメラ102による周期的な撮影によって得られた車両の近傍及び遠方の画像のそれぞれの相関と、車速センサ108によって検出された車速との双方を考慮することによって、車両が停止、回転、走行のいずれかの状態であるかを適切に判定することができる。更には、車両方位補正システム100−1は、その車両の状態が停止であれば、車両の方位を補正せず、回転及び走行のいずれかの状態であれば、ジャイロセンサ110によって検出された車両の角度変化に基づいて、車両の方位を補正することにより、方位が適切を補正することができる。
【0039】
なお、車両の角度変化は、カメラ102によって撮影された画像に基づいて算出することもできる。図7及び図8は、車両方位補正システム100−1による角度変化算出動作を示すフローチャートである。仮判定部104は、図3のS102において、カメラ102からの画像から抽出した最新の遠方画像における所定の領域(第1領域)を選択するとともに(S301)、画像保持部106に保持されている1つ前の遠方画像における所定の領域(第2領域)を選択する(S302)。ここで、第1領域と第2領域は、同一の形状及び同一の面積である。
【0040】
次に、仮判定部104は、S301にて選択した第1領域に含まれる画像と、S302にて選択した第2領域に含まれる画像との相関値を算出する(S303)。ここで、相関値は、周知の様々な手法によって算出可能である。更に、仮判定部104は、算出した相関値が予め定められた閾値c以上であるか否かを判定する(S304)。そして、相関値が閾値c以上である場合、換言すれば、第1領域に含まれる画像と、第2領域に含まれる画像とが近似している場合には、最新の遠方画像における第1領域の位置と1つ前の遠方画像における第2領域の位置との差を算出する(S305)。
【0041】
図9は、領域の位置の差の算出の一例を示す図である。図9(a)は、最新の画像200であり、遠方画像202において第1領域210が選択されている。一方、図9(b)は、1つ前の画像200であり、遠方画像202において第2領域220が選択されている。これら、第1領域210に含まれる画像と第2領域に含まれる画像とは、近似しており、相関値は閾値c以上である。
【0042】
このような場合、仮判定部104は、図9(a)の最新の画像200における、第1領域210の中心Mの座標(画像200の左端からの距離がL1)と、図9(b)の1つ前の画像200における、第2領域220の中心Nの座標(画像200の左端からの距離がL2)との差(L2−L1)を、最新の遠方画像200における第1領域210の位置と1つ前の遠方画像200における第2領域220の位置との差として算出する。
【0043】
次に、仮判定部104は、算出した最新の遠方画像における第1領域の位置と1つ前の遠方画像における第2領域の位置との差と、画像の光軸と地面が交わる距離とに基づいて、車両の角度変化を算出する(S306)。画像の光軸と地面が交わる距離は、カメラ102の設置位置及び撮影方向により一意に決定されるものであり、この画像の光軸と地面が交わる距離によって、第1領域と第2領域との位置の差を車両の角度変化に換算する際の係数が決定される。このようにして算出された車両の角度変化は、判定・補正部112へ送られる。この場合、判定・補正部112は、図3のS106におけるジャイロセンサ110からの車両の角度変化を取得しなくても、仮判定部104によって算出された車両の角度変化を取得することにより、図4のS205における、車両の角度変化に基づく方位補正を行うことができる。
【0044】
一方、S304において、相関値が閾値c未満である場合、換言すれば、第1領域に含まれる画像と、第2領域に含まれる画像とが近似していない場合には、図8に示す動作に移行し、仮判定部104は、S301にて一度、第1領域を選択した後において、1つ前の遠方画像の全領域についてS303及びS304の処理がなされたか否かを判定する(S307)。そして、1つ前の遠方画像において未処理の領域が存在する場合には、仮判定部104は、その時点で選択されている第2領域の位置を所定量ずらした新たな第2領域を選択し(S308)、S303における第1領域と第2領域の画像の相関値の算出以降の動作を繰り返す。
【0045】
一方、1つ前の遠方画像において未処理の領域が存在しない場合には、仮判定部104は、最新の遠方画像の全領域についてS302以降の処理がなされたか否かを判定する(S309)。そして、最新の遠方画像において未処理の領域が存在する場合には、仮判定部104は、その時点で選択されている第1領域の位置を所定量ずらした新たな第1領域を選択し(S310)、S302における第2領域の選択以降の動作を繰り返す。また、最新の遠方画像において未処理の領域が存在しない場合には、一連の動作を終了する。この場合には、車両の角度変化は算出されないことになる。
【0046】
また、上述した図7及び図8に示す手順によって、仮判定部104により車両の角度変化が算出される場合には、その車両の角度変化に基づいて、ジャイロセンサ110によって検出される車両の角度変化を補正するようにしてもよい。
【0047】
図10(a)に示すように、ジャイロセンサ110によって検出される車両の角度変化がPであり、仮判定部104により算出された角度変化がQである場合、判定・補正部112は、補正係数TをT=Q/Pにより算出する。その後、判定・補正部112は、ジャイロセンサ110によって検出される車両の角度変化を取得すると、その取得した角度変化に補正係数Tを乗じた値を車両の角度変化として算出し、図4のS205における方位補正に用いる。
【0048】
更に、この補正係数Tを用いて、判定・補正部112は、加速度116によって検出される加速度を補正するようにしてもよい。具体的には、判定・補正部112は、加速度センサ116によって検出される加速度(補正前加速度)Rを取得すると、補正後の加速度SをS=R×Tにより算出する。この算出式は、以下のようにして得られる。すなわち、図10(b)に示すように、補正前加速度Rと補正後加速度Sとのなす角をθとすると、S=R/cosθであり、近似式T≒1/cosθを用いることにより、S=R×Tとなる。
【0049】
また、複数のカメラを用いて撮影が行われるようにしてもよい。図11は、本発明が適用された車両方位補正システムの第2の構成を示す図である。図11に示す車両方位補正システム100−2は、図1に示す車両方位補正システム100−1と比較すると、カメラ102に代えて、それぞれが撮影ユニットに対応する4台のカメラ103−1乃至103−4を有する。これらカメラ103−1乃至103−4(以下、これらをまとめて適宜「カメラ103」と称する)は、例えば、図12に示すように、車両の両側面部と、前部及び後部に搭載されている。
【0050】
車両方位補正システム100−2において、各カメラ103は、近傍範囲及び遠方範囲の双方を同時に撮影しており、この撮影によって得られた画像データは、所定の時間周期でサンプリングされ、撮影日時とカメラ103の識別情報が付加された上で仮判定部104へ送られる。
【0051】
仮判定部104は、各カメラ103からの画像を取得すると、これらカメラ103毎に、当該カメラ103からの画像について、近傍画像と遠方画像とを抽出する。更に、仮判定部104は、抽出した最新の近傍画像と同一の識別情報が付加された1つ前の近傍画像を画像保持部106から取得し、これら近傍画像の相関値を算出する。同様に、仮判定部104は、抽出した最新の遠方画像と同一の識別情報が付加された1つ前の遠方画像を画像保持部106から取得し、これら遠方画像の相関値を算出する。
【0052】
このようにして、カメラ103毎に近傍画像相関値及び遠方画像相関値が算出されると、仮判定部104は、カメラ103毎に、当該カメラ103に対応する近傍画像相関値及び遠方画像相関値に基づいて、車両状態の仮判定を行う。具体的な手順は、図3のS104と同様であり、仮判定の結果は、判定・補正部112へ送られる。
【0053】
判定・補正部112は、カメラ103毎の仮判定結果が全て回転で一致し、且つ、車速センサ108から取得した車速が0である場合にのみ、最終的な車両状態の判定結果を回転であるとし、ジャイロセンサ110から取得した角度変化に基づいて、車両の方位補正を行う。また、判定・補正部112は、カメラ103毎の仮判定結果が全て走行で一致し、且つ、車速センサ108から取得した車速が0以外である場合にのみ、最終的な車両状態の判定結果を走行であるとし、ジャイロセンサ110から取得した角度変化に基づいて、車両の方位補正を行う。
【0054】
また、車両方位補正システム100−2において、各カメラ103によって撮影された画像に基づいて車両の角度変化が算出されるようにしてもよい。この場合、仮判定部104は、各カメラ103からの画像毎に、図7におけるS301乃至S306の動作を行い、角度変化を算出する。このようにしてカメラ103毎に角度変化を算出すると、次に、仮判定部104は、そのカメラ103毎の角度変化の平均値を算出し、判定・補正部112へ出力する。判定・補正部112は、この角度変化の平均値を、仮判定部104によって算出された角度変化として用いることにより、上述したような車両の方位補正や、ジャイロセンサ110によって検出される車両の角度変化の補正、加速度センサ116によって検出される車両の加速度の補正を行う。
【0055】
また、近傍範囲を撮影するカメラと遠方範囲を撮影するカメラとを別々に設けてもよい。この場合には、仮判定部104は、図3のS102に示す近傍画像及び遠方画像の抽出を行わず、近傍範囲を撮影するカメラの撮影によって得られた近傍画像と、遠方範囲を撮影するカメラの撮影によって得られた遠方画像とを、そのまま相関値の算出(図3のS103)に用いる。なお、本発明は、上述した実施の形態に限定されるものではなく、必要に応じて種々の変更が可能である。
【産業上の利用可能性】
【0056】
以上、説明したように、本発明に係る車両方位補正システムは、方位を適切に補正することができ、車両方位補正システムとして有用である。
【図面の簡単な説明】
【0057】
【図1】車両方位補正システムの第1の構成を示す図である。
【図2】カメラの配置の第1の例を示す図である。
【図3】方位補正動作を示す第1のフローチャートである。
【図4】方位補正動作を示す第2のフローチャートである。
【図5】撮影画像の一例を示す図である。
【図6】画像データの一例を示す図である。
【図7】角度変化算出動作を示す第1のフローチャートである。
【図8】角度変化算出動作を示す第2のフローチャートである。
【図9】領域の位置の差の算出の一例を示す図である。
【図10】角度変化及び加速度の補正を説明する図である。
【図11】車両方位補正システムの第1の構成を示す図である。
【図12】カメラの配置の第2の例を示す図である。
【符号の説明】
【0058】
100−1、100−2 車両方位補正システム
102、103−1、103−2、103−3、103−4 カメラ
104 仮判定部
106 画像保持部
108 車速センサ
110 ジャイロセンサ
112 判定・補正部
114 モニタ
116 加速度センサ
【特許請求の範囲】
【請求項1】
車両の方位を補正する車両方位補正システムであって、
前記車両の近傍の第1の範囲と、該第1の範囲よりも遠方の第2の範囲とを周期的に撮影する撮影手段と、
前記車両の速度を検出する車速検出手段と、
前記撮影手段の撮影により得られた撮影タイミングの異なる2つの第1の範囲の画像の相関、及び、撮影タイミングの異なる2つの第2の範囲の画像の相関と、前記車速検出手段により検出された車両の速度とに基づいて、前記車両が停止、回転及び走行のいずれかの状態であるかを判定する車両状態判定手段と、
前記車両の角度変化を検出する角度変化検出手段と、
前記車両状態判定手段により前記車両が回転及び走行のいずれかの状態であると判定された場合に、前記角度変化検出手段により検出された車両の角度変化に基づいて、前記車両の方位を補正する方位補正手段とを有することを特徴とする車両方位補正システム。
【請求項2】
前記車両状態判定手段は、
前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値以上であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値以上であって、且つ、前記車両の速度が0である場合に、前記車両が停止の状態であると判定し、
前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値以上であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値未満であって、且つ、前記車両の速度が0である場合に、前記車両が回転の状態であると判定し、
前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値未満であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値未満であって、且つ、前記車両の速度が0でない場合に、前記車両が走行の状態であると判定することを特徴とする請求項1に記載の車両方位補正システム。
【請求項3】
前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値未満であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値未満であって、且つ、前記車両の速度が0である場合と、前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値以上であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値以上であって、且つ、前記車両の速度が0でない場合とにおいて、所定の警告を提示する警告提示手段を有することを特徴とする請求項2に記載の車両方位補正システム。
【請求項4】
前記車両状態判定手段は、前記撮影手段が複数の撮影ユニットにより構成される場合に、前記撮影ユニット毎に、該撮影ユニットの撮影により得られた撮影タイミングの異なる2つの第1の範囲の画像の相関、及び、撮影タイミングの異なる2つの第2の範囲の画像の相関と、前記車速検出手段により検出された車両の速度とに基づいて、前記車両の状態を判定し、
前記方位補正手段は、前記車両状態判定手段により前記撮影ユニット毎に判定された車両の状態が回転及び走行のいずれかで一致する場合にのみ、前記角度変化検出手段により検出された車両の角度変化に基づいて、前記車両の方位を補正することを特徴とする請求項1乃至3のいずれかに記載の車両方位補正システム。
【請求項5】
前記撮影手段の撮影により得られた撮影タイミングの異なる2つの第2の範囲の画像のうち、一方の第2の範囲の画像内の第1の領域を選択し、他方の第2の範囲の画像内において前記一方の第2の範囲の画像内の第1の領域に含まれる画像との相関が第3の閾値以上である画像を含む第2の領域を検出し、前記一方の第2の範囲の画像内における第1の領域の位置と、前記他方の第2の範囲の画像内における第2の領域の位置との差に基づいて、前記車両の角度変化を算出する角度変化算出手段を有し、
前記方位補正手段は、前記車両状態判定手段により前記車両が回転の状態であると判定された場合に、前記角度変化算出手段により算出された車両の角度変化に基づいて、前記車両の方位を補正することを特徴とする請求項1乃至4のいずれかに記載の車両方位補正システム。
【請求項6】
前記角度変化算出手段は、前記撮影手段が複数の撮影ユニットにより構成される場合に、前記撮影ユニット毎に、該撮影ユニットの撮影により得られた撮影タイミングの異なる2つの第2の範囲の画像のうち、一方の第2の範囲の画像内の第1の領域を選択し、他方の第2の範囲の画像内において前記一方の第2の範囲の画像内の第1の領域に含まれる画像との相関が第3の閾値以上である画像を含む第2の領域を検出し、前記一方の第2の範囲の画像内における第1の領域の位置と、前記他方の第2の範囲の画像内における第2の領域の位置との差に基づいて、前記車両の角度変化を算出し、前記撮影ユニット毎に算出された車両の角度変化の平均値を最終的な前記車両の角度変化として算出することを特徴とする請求項5に記載の車両方位補正システム。
【請求項7】
前記角度変化検出手段により検出された車両の角度変化と、前記角度変化算出手段により算出された車両の角度変化とに応じて定められる補正値を用いて、前記角度変化検出手段により検出された車両の角度変化を補正する角度変化補正手段を有し、
前記方位補正手段は、前記車両状態判定手段により前記車両が回転及び走行のいずれかの状態であると判定された場合に、前記角度変化補正手段による補正後の前記車両の角度変化に基づいて、前記車両の方位を補正することを特徴とする請求項5又は6に記載の車両方位補正システム。
【請求項8】
前記車両の加速度を検出する加速度検出手段と、
前記角度変化検出手段により検出された車両の角度変化と、前記角度変化算出手段により算出された車両の角度変化とに応じて定められる補正値を用いて、前記加速度検出手段により検出された車両の加速度を補正する加速度補正手段とを有することを特徴とする請求項5乃至7のいずれかに記載の車両方位補正システム。
【請求項1】
車両の方位を補正する車両方位補正システムであって、
前記車両の近傍の第1の範囲と、該第1の範囲よりも遠方の第2の範囲とを周期的に撮影する撮影手段と、
前記車両の速度を検出する車速検出手段と、
前記撮影手段の撮影により得られた撮影タイミングの異なる2つの第1の範囲の画像の相関、及び、撮影タイミングの異なる2つの第2の範囲の画像の相関と、前記車速検出手段により検出された車両の速度とに基づいて、前記車両が停止、回転及び走行のいずれかの状態であるかを判定する車両状態判定手段と、
前記車両の角度変化を検出する角度変化検出手段と、
前記車両状態判定手段により前記車両が回転及び走行のいずれかの状態であると判定された場合に、前記角度変化検出手段により検出された車両の角度変化に基づいて、前記車両の方位を補正する方位補正手段とを有することを特徴とする車両方位補正システム。
【請求項2】
前記車両状態判定手段は、
前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値以上であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値以上であって、且つ、前記車両の速度が0である場合に、前記車両が停止の状態であると判定し、
前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値以上であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値未満であって、且つ、前記車両の速度が0である場合に、前記車両が回転の状態であると判定し、
前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値未満であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値未満であって、且つ、前記車両の速度が0でない場合に、前記車両が走行の状態であると判定することを特徴とする請求項1に記載の車両方位補正システム。
【請求項3】
前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値未満であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値未満であって、且つ、前記車両の速度が0である場合と、前記撮影タイミングの異なる2つの第1の範囲の画像の相関が第1の閾値以上であり、前記撮影タイミングの異なる2つの第2の範囲の画像の相関が第2の閾値以上であって、且つ、前記車両の速度が0でない場合とにおいて、所定の警告を提示する警告提示手段を有することを特徴とする請求項2に記載の車両方位補正システム。
【請求項4】
前記車両状態判定手段は、前記撮影手段が複数の撮影ユニットにより構成される場合に、前記撮影ユニット毎に、該撮影ユニットの撮影により得られた撮影タイミングの異なる2つの第1の範囲の画像の相関、及び、撮影タイミングの異なる2つの第2の範囲の画像の相関と、前記車速検出手段により検出された車両の速度とに基づいて、前記車両の状態を判定し、
前記方位補正手段は、前記車両状態判定手段により前記撮影ユニット毎に判定された車両の状態が回転及び走行のいずれかで一致する場合にのみ、前記角度変化検出手段により検出された車両の角度変化に基づいて、前記車両の方位を補正することを特徴とする請求項1乃至3のいずれかに記載の車両方位補正システム。
【請求項5】
前記撮影手段の撮影により得られた撮影タイミングの異なる2つの第2の範囲の画像のうち、一方の第2の範囲の画像内の第1の領域を選択し、他方の第2の範囲の画像内において前記一方の第2の範囲の画像内の第1の領域に含まれる画像との相関が第3の閾値以上である画像を含む第2の領域を検出し、前記一方の第2の範囲の画像内における第1の領域の位置と、前記他方の第2の範囲の画像内における第2の領域の位置との差に基づいて、前記車両の角度変化を算出する角度変化算出手段を有し、
前記方位補正手段は、前記車両状態判定手段により前記車両が回転の状態であると判定された場合に、前記角度変化算出手段により算出された車両の角度変化に基づいて、前記車両の方位を補正することを特徴とする請求項1乃至4のいずれかに記載の車両方位補正システム。
【請求項6】
前記角度変化算出手段は、前記撮影手段が複数の撮影ユニットにより構成される場合に、前記撮影ユニット毎に、該撮影ユニットの撮影により得られた撮影タイミングの異なる2つの第2の範囲の画像のうち、一方の第2の範囲の画像内の第1の領域を選択し、他方の第2の範囲の画像内において前記一方の第2の範囲の画像内の第1の領域に含まれる画像との相関が第3の閾値以上である画像を含む第2の領域を検出し、前記一方の第2の範囲の画像内における第1の領域の位置と、前記他方の第2の範囲の画像内における第2の領域の位置との差に基づいて、前記車両の角度変化を算出し、前記撮影ユニット毎に算出された車両の角度変化の平均値を最終的な前記車両の角度変化として算出することを特徴とする請求項5に記載の車両方位補正システム。
【請求項7】
前記角度変化検出手段により検出された車両の角度変化と、前記角度変化算出手段により算出された車両の角度変化とに応じて定められる補正値を用いて、前記角度変化検出手段により検出された車両の角度変化を補正する角度変化補正手段を有し、
前記方位補正手段は、前記車両状態判定手段により前記車両が回転及び走行のいずれかの状態であると判定された場合に、前記角度変化補正手段による補正後の前記車両の角度変化に基づいて、前記車両の方位を補正することを特徴とする請求項5又は6に記載の車両方位補正システム。
【請求項8】
前記車両の加速度を検出する加速度検出手段と、
前記角度変化検出手段により検出された車両の角度変化と、前記角度変化算出手段により算出された車両の角度変化とに応じて定められる補正値を用いて、前記加速度検出手段により検出された車両の加速度を補正する加速度補正手段とを有することを特徴とする請求項5乃至7のいずれかに記載の車両方位補正システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2008−64716(P2008−64716A)
【公開日】平成20年3月21日(2008.3.21)
【国際特許分類】
【出願番号】特願2006−245704(P2006−245704)
【出願日】平成18年9月11日(2006.9.11)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成20年3月21日(2008.3.21)
【国際特許分類】
【出願日】平成18年9月11日(2006.9.11)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]