
車両検索システム
【課題】車両の方向の情報と共に該情報の信頼性の情報が表示され、高い信頼性の下で車両の方向を検索できる車両検索システムを提供する。
【解決手段】車両検索システム1は、携帯機2から観た絶対方位を検出する電子コンパス22と、車両3から観た携帯機の相対方向を検出すると共に当該車両に到来する到来電波の電波強度を測定するアレーアンテナ33a,33dと、車両3から観た絶対方位を検出する電子コンパス32と、携帯機2の相対方向の情報と車両3から観た絶対方位の情報とに基づき、車両から観た携帯機の絶対方向を演算する車両側制御部31と、車両3から携帯機2に送信された同車両3から観た携帯機2の絶対方向の情報と、携帯機2から観た絶対方位の情報とに基づき、同携帯機2から観た車両3の相対方向を演算する携帯機側制御部21と、車両3の相対方向の情報を表示すると共に、電波強度の情報を所定の表現手段で表示する表示部25とを備える。
【解決手段】車両検索システム1は、携帯機2から観た絶対方位を検出する電子コンパス22と、車両3から観た携帯機の相対方向を検出すると共に当該車両に到来する到来電波の電波強度を測定するアレーアンテナ33a,33dと、車両3から観た絶対方位を検出する電子コンパス32と、携帯機2の相対方向の情報と車両3から観た絶対方位の情報とに基づき、車両から観た携帯機の絶対方向を演算する車両側制御部31と、車両3から携帯機2に送信された同車両3から観た携帯機2の絶対方向の情報と、携帯機2から観た絶対方位の情報とに基づき、同携帯機2から観た車両3の相対方向を演算する携帯機側制御部21と、車両3の相対方向の情報を表示すると共に、電波強度の情報を所定の表現手段で表示する表示部25とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車等の車両のユーザ(運転者等)に所持される携帯機と当該車両との間で無線通信を行い、該通信の結果に基づいて携帯機(ユーザ)から観た車両の方向を検索する車両検索システムに関する。
【背景技術】
【0002】
この種の車両検索システムには、所謂、移動体通信技術が利用されており、車両のユーザから観た車両の方向を安定に検索すべく、車両のユーザに所持される携帯機と車両に搭載された車載通信装置以外に、無線通信を中継する通信インフラ設備(案内端末、認識端末、管理コンピュータ等)を設けたものが知られている(例えば、特許文献1参照)。
【0003】
また、移動体通信技術において、そのような通信インフラ設備を使用しないものも知られている(例えば、特許文献2参照)。即ち、この技術では、車両が携帯機(始動キー)からの探索要求信号を受信すると、車両の地磁気センサ(方位検出手段)で検出した車両から観た絶対方位の情報(車両から観た、東西南北の4方位を基準とする方位の情報)を用い、東西南北の4方位を基準とする4種の方位識別信号(4種の方位識別コードで区別されている信号)を、それぞれ異なる方向に向くように車両の4箇所に設けた指向性アンテナから携帯機に送信する。
【0004】
そして、該携帯機においては、各方位識別信号の受信強度分布に基づいて当該携帯機から観た車両の相対方向や離間距離が検出(演算)されるとともに、携帯機の地磁気センサ(方位検出手段)で検出した携帯機から観た絶対方位の情報(携帯機から観た、東西南北の4方位を基準とする方位の情報)を用い、車両のユーザ(携帯機)から観た車両の方向の検索が行なわれるようになっている。
【0005】
ところが、前者の技術によれば、通信インフラ設備としての端末類を設置するためには、相当額の投資が必要となる。また、当然ながら、車両検索システムは、そのような通信インフラ設備が設置された限られた施設内でしか利用することができない。
【0006】
一方、後者の技術によれば、そのような通信インフラ設備が不要であることから、地下駐車場等の外来電波の遮断された空間を含む多様な場所で利用することができる。ところが、携帯機から観た車両の相対方向や離間距離の検出は、同携帯機における4種類の方位識別信号の受信強度に依存しているため、その受信強度が、車両の相対方向や離間距離以外の何らかの要因で変動するような場合、例えば、建造物等の障害物や地面での反射等の影響が無視できない場合には、車両の方向の検索が正確に行なわれないことが考えられる。
【0007】
さらに、この技術によれば、原理的に、車両側では当該車両から観た携帯機の方向に関する情報は持ち得ないことになる。
これに対し、本願出願人は、同種の移動体通信技術であって、先に車両の方向を多様な場所で正確に検索できる車両検索システムを開発している。
【0008】
当該技術では、車両側に携帯機の相対方向検出手段としてのアダプティブアレーアンテナと絶対方位検出手段としての電子コンパスを設けており、各手段によって検出された情報に基づいて車両側の携帯機絶対方向演算手段としての車両側制御部によって車両から観た携帯機の絶対方向を演算する。そして、携帯機側に設けた車両方向演算手段としての携帯機側制御部によって、車両から携帯機に送信された前記携帯機の絶対方向の情報と携帯機から観た絶対方位の情報とに基づいて携帯機から観た車両の相対方向を演算するようにしている。
【特許文献1】特開2005−350916号公報
【特許文献2】特開2006−125983号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
この技術によれば、通信インフラ設備が不要であり、さらに、携帯機から車両に送信する電波の受信強度が何らかの要因で変動するような場合、例えば、障害物や地面での反射等の影響が無視できない場合であっても、車両の方向の検索が正確に行えるという優れた効果が得られる。
【0010】
さらに、この技術の改良技術として、例えば、建造物等の障害物や地面での反射等の影響がある場合に、車両が携帯機から本来受信すべき直接波に加えて、それらの反射波等による影響を何らかの情報によって確認できれば、当該情報を携帯機の表示部に表示される車両の方向に対する信頼性の判断基準、即ち、車両の相対方向又は絶対方向の信頼性情報とすることができ、より高い信頼性の下で車両の方向を検索することができると考えられる。
【0011】
本発明は、上記問題点を解決するためになされたものであって、その目的は、車両の方向の情報と共に該情報の信頼性情報を用いることで、高い信頼性の下で車両の方向を検索できる車両検索システムを提供することにある。
【課題を解決するための手段】
【0012】
上記問題点を解決するために、請求項1に記載の発明は、車両のユーザに所持される携帯機と当該車両との間で無線通信を行い、該通信の結果に基づいて携帯機から観た車両の方向を検索する車両検索システムであって、前記携帯機に設けられ、同携帯機から観た絶対方位を検出する第1絶対方位検出手段と、前記車両にそれぞれ設けられ、前記携帯機から送信される電波に基づいて、当該車両から観た携帯機の相対方向を検出する携帯機相対方向検出手段と、当該車両から観た絶対方位を検出する第2絶対方位検出手段と、前記携帯機の相対方向の情報と前記車両から観た絶対方位の情報とに基づき、前記車両から観た携帯機の絶対方向を演算する携帯機絶対方向演算手段と、前記携帯機又は車両に設けられ、前記携帯機の絶対方向の情報と前記携帯機又は車両から観た絶対方位の情報とに基づき、前記携帯機から観た車両の相対方向又は絶対方向を演算する車両方向演算手段と、前記携帯機に設けられ、前記車両の相対方向又は絶対方向の情報を表示することに加えて、同各方向の信頼性情報を所定の表現手段によって表示する表示手段とを備えたこと、を要旨とする。
【0013】
同構成によれば、車両側に携帯機相対方向検出手段が設けられている場合において、携帯機から送信される電波に基づいて検出された、携帯機から観た車両の相対方向又は絶対方向が、同各方向の信頼性情報と共に携帯機の表示手段に表示される。このため、車両のユーザは、建造物等の障害物や地面によって反射される反射波等を含み、それぞれが車両の相対方向又は絶対方向として表示手段に表示される複数の到来電波の内のいずれか一の電波が正確な車両の相対方向又は絶対方向を示しているかの信頼性の判断基準として、同車両の相対方向又は絶対方向の信頼性情報を用いることができる。これにより、携帯機から到来する到来電波の方向に対応し、複数の車両の相対方向又は絶対方向が表示手段に表示されている場合に、当該信頼性情報を判断基準として、携帯機側において、車両の相対方向又は絶対方向を信頼性高く認識することができるようになる。
【0014】
請求項2に記載の発明は、請求項1に記載の車両検索システムにおいて、前記車両に設けられ、同車両に到来する到来電波の電波強度を測定する電波強度測定手段と、前記携帯機に設けられ、前記各方向の情報を表示することに加えて、前記各方向の信頼性情報として前記電波強度の情報を所定の表現手段によって表示する表示手段とを備えたこと、を要旨とする。
【0015】
同構成によれば、携帯機から到来する到来電波の方向に対応し、複数の車両の相対方向又は絶対方向が表示手段に表示されている場合に、信頼性情報としての各到来電波の電波強度の情報を判断基準として、携帯機側において、車両の相対方向又は絶対方向を信頼性高く認識することができるようになる。
【0016】
請求項3に記載の発明は、請求項2に記載の車両検索システムにおいて、前記表示手段は、前記車両の相対方向又は絶対方向を矢印として表示するとともに、前記信頼性情報としての電波強度を当該矢印の長さとして表示するようにしたこと、を要旨とする。
【0017】
同構成によれば、携帯機の表示手段が、到来電波の方向に対応する車両の相対方向又は絶対方向を矢印として表示するとともに、信頼性情報としての到来電波の電波強度を当該矢印の長さとして表示するようにしたので、携帯機側において、車両の相対方向又は絶対方向、及び、各相対方向又は絶対方向の情報に対する信頼性について、視覚を通して簡単且つ確実に把握できるようになる。
【0018】
請求項4に記載の発明は、請求項2又は請求項3に記載の車両検索システムにおいて、前記表示手段は、前記携帯機から車両に送信される複数の電波の内、前記電波強度が最大である電波によって取得される前記携帯機の相対方向又は絶対方向の情報に対応する車両の相対方向又は絶対方向を矢印として表示し、しかも、当該電波強度が最大である電波と、同電波強度が2番目に大きな電波との電波強度比を前記車両の相対方向又は絶対方向の信頼性情報とし、当該電波強度比が所定比率以上である場合には、同矢印を第1の色彩にて表示する一方、同電波強度比が当該所定比率未満である場合には、同矢印を第2の色彩にて表示するようにしたこと、を要旨とする。
【0019】
同構成によれば、携帯機の表示手段が、携帯機から車両に送信される複数の電波の内、電波強度が最大である電波によって取得される携帯機の相対方向の情報に対応する車両の相対方向を矢印として表示するようにした。しかも、当該電波強度が最大である電波と、同電波強度が2番目に大きな電波との電波強度比を前記車両の相対方向又は絶対方向の信頼性情報とし、当該電波強度比が所定比率以上である場合には、同矢印を第1の色彩にて表示する一方、同電波強度比が当該所定比率未満である場合には、同矢印を第2の色彩にて表示するようにした。これにより、携帯機から到来する到来電波の方向に対応し、車両の相対方向が表示部に第1の色彩の矢印として表示されている場合に、各電波強度の情報、即ち、各矢印の当該色彩を当該信頼性情報の表現手段として用いることができ、携帯機側において、車両の相対方向を信頼性高く認識することができるようになる。
【0020】
請求項5に記載の発明は、請求項4に記載の車両検索システムにおいて、前記表示手段は、前記電波強度が最大である電波の品質をさらに前記車両の相対方向又は絶対方向の信頼性情報とし、当該信頼性情報としての品質に応じて変更される画像をさらに表示するようにしたこと、を要旨とする。
【0021】
同構成によれば、携帯機の表示手段に、電波強度が最大である電波の品質をさらに前記車両の相対方向又は絶対方向の信頼性情報とし、当該信頼性情報としての品質に応じて変更される画像をさらに当該信頼性情報の表現手段として表示するようにした。これにより、矢印の色彩のみならず、当該画像によっても矢印に対応する電波への信頼性を認識することができるようになる。
【0022】
請求項6に記載の発明は、請求項1に記載の車両検索システムにおいて、前記携帯機又は車両に設けられ、前記携帯機の絶対方向と前記車両の絶対方向との合致性を判断する絶対方向合致性判断手段をさらに備え、前記携帯機の絶対方向と前記車両の絶対方向との合致性を前記信頼性情報とし、前記携帯機に設けられ、前記携帯機の絶対方向と前記車両の絶対方向とが合致したときに、前記車両の相対方向又は絶対方向の情報を表示する表示手段をさらに備えたこと、を要旨とする。
【0023】
同構成によれば、携帯機の絶対方向と車両の絶対方向との合致性を信頼性情報とし、車両から観た携帯機の絶対方向と、携帯機から観た車両の絶対方向とが合致したときに、車両の相対方向又は絶対方向の情報が携帯機の表示手段に表示される。このため、車両のユーザは、表示手段に表示される車両の相対方向又は絶対方向の信頼性の判断基準として、当該車両の相対方向又は絶対方向の情報自体を用いることができる。これにより、表示手段に表示される車両の相対方向又は絶対方向の情報自体が信頼性情報の表現手段となり、携帯機側において、車両の相対方向又は絶対方向を簡単且つ信頼性高く認識することができるようになる。
【0024】
請求項7に記載の発明は、請求項6に記載の車両検索システムにおいて、前記表示手段は、前記携帯機の絶対方向と前記車両の絶対方向とが合致したときには、前記携帯機の相対方向又は絶対方向を矢印として表示するとともに当該矢印の先端領域に前記車両の画像を表示する一方、前記携帯機の絶対方向と前記車両の絶対方向とが合致しないときには、前記車両の画像を表示することなく前記矢印のみを表示するようにしたこと、を要旨とする。
【0025】
同構成によれば、携帯機の表示手段が、携帯機の絶対方向と車両の絶対方向とが合致したときには、携帯機の相対方向又は絶対方向を矢印として表示するとともに当該矢印の先端領域に信頼性情報の表現手段として車両の画像を表示する一方、携帯機の相対方向と車両の相対方向とが合致しないときには、車両の画像を表示することなく矢印のみを表示するようにしたので、携帯機側において、正確な車両の相対方向を視覚を通して簡単且つ確実に把握できるようになる。
【0026】
請求項8に記載の発明は、請求項1〜請求項7のいずれか一項に記載の車両検索システムにおいて、前記車両及び携帯機相対方向検出手段が、アダプティブアレーアンテナであること、を要旨とする。
【0027】
同構成によれば、複数のアンテナ素子から入力される電波の振幅又は位相を調節することで指向性ビームを自在に制御し、多様な指向性を作成することで電波の到来方向が検出できるアダプティブアレーアンテナを車両に設けられた相対方向検出手段として用いる。このため、電波の到来方向、即ち、車両から観た携帯機の相対方向を容易且つ確実に検出することができる。しかも、アダプティブアレーアンテナは、車両の1箇所に集中して設けることで電波の到来方向が推定できるので、相対方向検出手段の構成が簡単化できる。
【発明の効果】
【0028】
本発明によれば、車両の方向の情報と共に該情報の信頼性情報を用いることで、高い信頼性の下で車両の方向を検索できる車両検索システムを提供することができる。
【発明を実施するための最良の形態】
【0029】
以下、本発明を具体化した実施形態について図面に従って説明する。
[第1実施形態]
<車両検索システム1の全体構成>
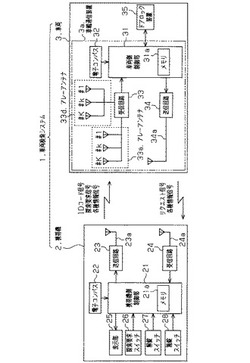
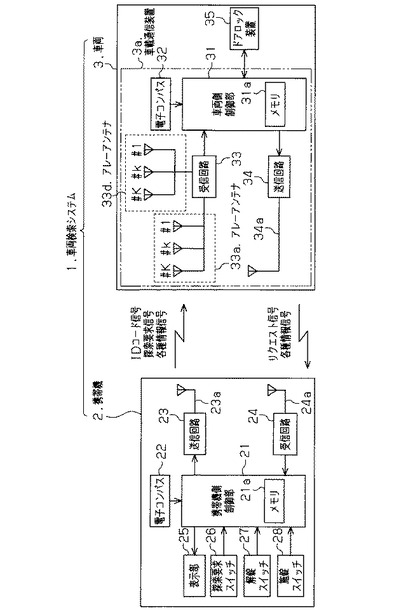
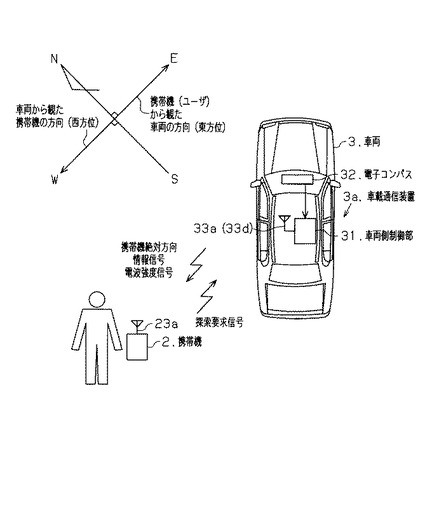
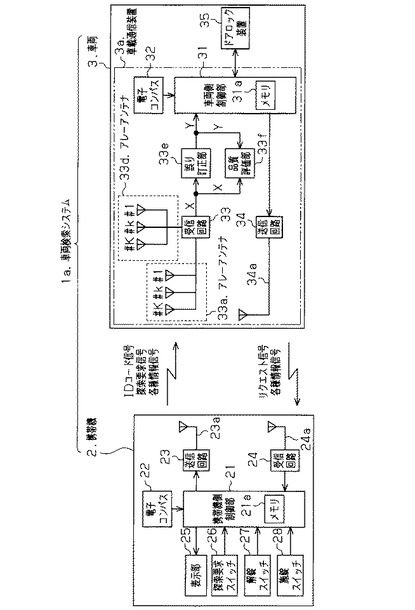
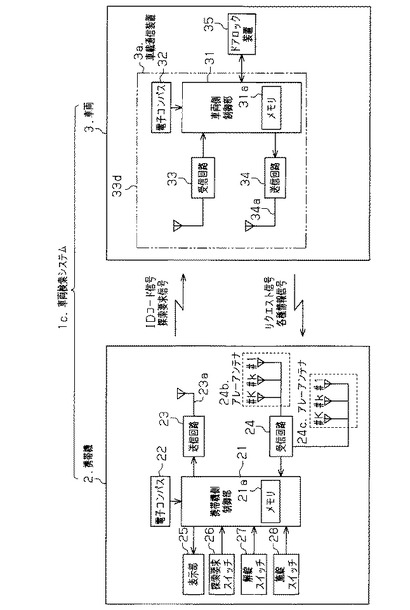
図1に示すように、本実施形態の車両検索システム1は、車両3のユーザにより所持される携帯機2と、車両3に搭載され、前記携帯機2との間で無線通信を行う車載通信装置3aとから構成されている。ここで携帯機2としては、例えば、専ら車両3の鍵として機能する電波キーや、車両3の鍵と携帯電話とが兼用化された携帯電話キーが挙げられるが、本実施形態では、後者の携帯電話キーを想定している(図7参照)。
【0030】
前記携帯機2は、車載通信装置3aに向けてアンテナ23aを介して電波(IDコード信号等)を送信する送信回路23と、車載通信装置3aから送信される電波(リクエスト信号等)をアンテナ24aを介して受信する受信回路24と、該送信回路23及び受信回路24に電気的に接続され、両回路23,24の送受信状態を制御する携帯機側制御部21とを備えている。尚、ここで、IDコード信号及びリクエスト信号は、携帯機2と車両3との間において、IDコード認証のために送受信されるものである。
【0031】
前記携帯機側制御部21には、携帯機2に設けられ、車両3のドアを遠隔で施解錠するために操作される解錠スイッチ27及び施錠スイッチ28が電気的に接続されている。該携帯機側制御部21には、さらに、携帯機2に設けられ、車載通信装置3aから後述する所定の情報を送信させるための探索要求スイッチ26が電気的に接続されている。該携帯機側制御部21には、さらに、携帯機2にそれぞれ設けられ、携帯機2から観た絶対方位を検出する第1絶対方位検出手段としての電子コンパス22と、後述する所定の情報を表示させる表示手段としての表示部25とが電気的に接続されている。ここで、表示部25は、小型の液晶パネル装置によって構成されている。
【0032】
そして、前記携帯機側制御部21は、前記各回路23,24、各スイッチ26〜28、表示部25、電子コンパス22の各動作を制御する制御プログラムを格納するとともに、必要なデータを記憶したメモリ21aを備えている。
【0033】
一方、前記車載通信装置3aは、携帯機2に向けてアンテナ34aを介して電波(リクエスト信号等)を送信する送信回路34と、携帯機2から送信される電波(IDコード信号等)を直接的に受信し、車両3から観た携帯機2の相対方向を検出する携帯機相対方向検出手段、及び、携帯機2から直接的に送信される電波を含んで車両3に到来する到来電波の電波強度を測定する電波強度測定手段としてのアダプティブアレーアンテナ(アレーアンテナ)33a(アンテナ素子♯1,…,アンテナ素子♯k,…,アンテナ素子♯K)及びアダプティブアレーアンテナ33d(アンテナ素子♯1,…,アンテナ素子♯k,…,アンテナ素子♯K)と、該アダプティブアレーアンテナ33a,33dを介して前記電波を受信する受信回路33と、該送信回路34及び受信回路33に電気的に接続され、両回路34,33の送受信状態を制御する車両側制御部31とを備えている。
【0034】
前記車両側制御部31には、さらに、車載通信装置3aに設けられ、車両3から観た絶対方位を検出する第2絶対方位検出手段としての電子コンパス32と、車両3に設けられ、同車両3のドアの施解錠装置(図示せず)の施解錠状態を制御するドアロック装置35とが電気的に接続されている。
【0035】
そして、前記車両側制御部31は、前記各回路33,34、ドアロック装置35、電子コンパス32の各動作を制御する制御プログラムを格納するとともに、必要なデータを記憶したメモリ31aを備えている。
【0036】
<アダプティブアレーアンテナ33a,33dの構成>
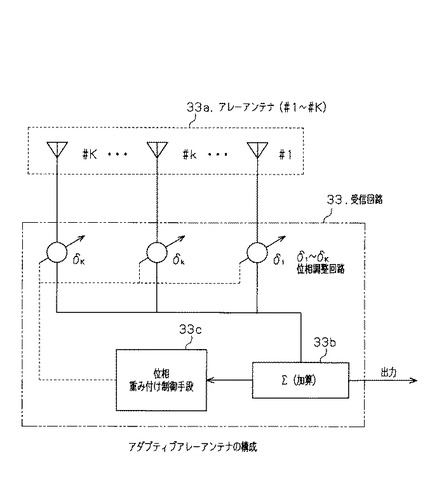
前記各アダプティブアレーアンテナ33a,33dは、図2を参照して、K個(複数)のアンテナ素子によって構成されている。具体的には、直線状(リニア)に等間隔に配列されたアンテナ素子♯1,…,アンテナ素子♯k,…,アンテナ素子♯K(K≧k≧2)から構成されている。該各アダプティブアレーアンテナ33a,33dは、それぞれ180°の角度範囲のみ走査され、両者で相補的に360°範囲の方向(全方向)が走査されるようになっている。尚、各アレーアンテナ33a,33dは、このように走査範囲が異なるのみで構造は同一であるので、対応する箇所についての説明は省略することとし、以下、アダプティブアレーアンテナ33aについてのみ説明する。
【0037】
前記各アンテナ素子♯1,…,♯k,…,♯Kは、それぞれ、位相調整回路δ1,…,δk,…δKを介して各アンテナ素子♯1〜♯Kからの出力を前記位相調整回路δ1〜δKによる所定の処理を経て加算する加算器33bに電気的に接続されている。そして、該加算器33bには、前記加算した出力と後述する重み付け係数w1〜wKとに基づき、前記位相調整回路δ1〜δKを制御して前記各アンテナ素子♯1〜♯Kの指向性ビームの位相を所定角度θ(−90°≦θ≦90°)に揃える位相重み付け制御手段33cが電気的に接続されている。尚、これらの位相調整回路δ1〜δK、加算器33b、位相重み付け制御手段33cは、各アレーアンテナ33a,33dについて一組ずつ存在し、それぞれ、前記した受信回路33の一部を構成しており、前記メモリ31aに格納された制御プログラムによりそれらの各動作が制御される。
【0038】
<電波の到来方向検出法>
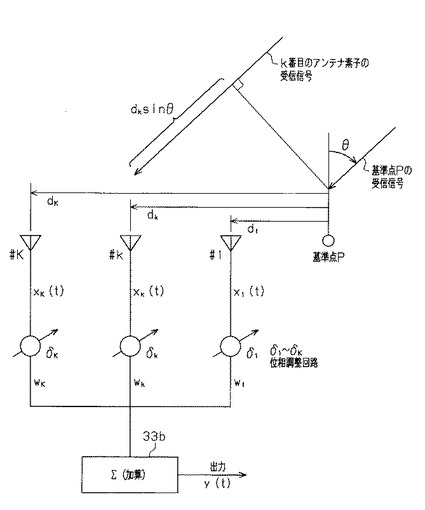
本実施形態の車両検索システム1は以上のように構成されており、以下、同車両検索システム1によって電波の到来方向を検出する方法について説明する。尚、ここでは、電波の到来方向検出法として、指向性ビームによる空間操作を行うビームフォーマ法を用いる。該ビームフォーマ法は、一様励振アレーアンテナであるアダプティブアレーアンテナ33a(33d)のメインビームを180°範囲の方向[(−90°≦θ≦90°)の方向]で走査し、その出力電力が大きくなる方向を探索する方法である。
【0039】
図3に示すように、今、電波(平面波)が角度θ(−90°≦θ≦90°)の方向から到来しているとする。同図において、xk(t)(k=1,2,…,K)は、携帯機相対方向検出手段及び電波強度測定手段であること以外に、さらに電波の到来方向推定手段でもあるアダプティブアレーアンテナ33aによる時刻tにおける受信信号、wk(k=1,2,…,K)は、各アンテナ素子♯k(k=1,2,…,K)における重み付け係数、dk(k=1,2,…,K)は、同図に示す基準点P(ベースライン上の基準点P)より測ったk(k=1,2,…,K)番目のアンテナ素子♯k(k=1,2,…,K)の位置(距離)をそれぞれ示す。
【0040】
この場合、アダプティブアレーアンテナ33a(各アンテナ素子♯1〜♯K)からの加算器33bを介した出力y(t)(t:時刻)は、下式(1)で表される。
[数1]
y(t)=WH・X(t) …式(1)
ここで、X(t)=[x1(t),x2(t),…,xK(t)]T、W(ウェイトベクトル)=[w1,w2,…,wK]Tであり、添え字のHは複素共役転置を示し、添え字のTは転置を示す。
【0041】
すると、アダプティブアレーアンテナ33aの出力電力Poutは、下式(2)で与えられる。
[数2]
Pout=0.5・E[|y(t)|2]=0.5・WH・Rxx・W …式(2)
ここで、Rxx(自己相関行列)=E[X(t)・XH(t)](E[]は時系列でサンプリングした値の平均をとることを意味する。)である。そして、アダプティブアレーアンテナ33a(各アンテナ素子♯1〜♯K)のメインビームを角度θに向けるべく、同相になるように位相を揃えるための共相条件より、前記各重み付け係数wk(k=1,2,…,K)を下式(3)のように設定する。
[数3]
wk=exp(-j・2π/λ・dk・sinθ)(k=1,2,…,K) …式(3)
次に、この角度θを−90°から90°まで変化させ、アダプティブアレーアンテナ33aの出力電力Pout(θ)のピークを探索する。
【0042】
上式(3)で示した重み付け係数wk(k=1,2,…,K)からなるウェイトベクトルWは、角度θを変数とするモードベクトルa(θ)と表記されるので、下式(4)が成立する。
[数4]
W=a(θ)=[exp(-j・2π/λ・d1・sinθ),…,exp(-j・2π/λ・dK・sinθ)] …式(4)
すると、アダプティブアレーアンテナ33aの出力電力Pout(θ)は、上式(2)より、下式(5)で示される。
[数5]
Pout(θ)=0.5・aH(θ)・Rxx・a(θ) …式(5)
したがって、本ビームフォーマ法による角度分布(角度スペクトラム)PBF(θ)は、この出力電力Pout(θ)を正規化することで、下式(6)として得られる。
[数6]
PBF(θ)=Pout/(aH(θ)・a(θ)/2)
=aH(θ)・Rxx・a(θ)/aH(θ)・a(θ) …式(6)
上式(6)において、角度θを−90°から90°まで変化させたときのPBF(θ)のピークの角度位置θp(−90°≦θp≦90°)から電波の到来方向が検出される。
【0043】
<車両3の相対方向検索法>
以下、本実施形態の車両検索システム1による、携帯機2から観た車両3の相対方向を検索する方法について説明する。
【0044】
ここでは、図4に示すように、車両3のユーザに所持された携帯機2と、当該車両3の位置関係について、車両3が携帯機2から観て東方位に位置している状態、即ち、携帯機2が車両3から観て西方位に位置している状態を設定する。ここで、携帯機2には前記アンテナ23aが備えられており、車両3には前記車両側制御部31及び該車両側制御部31に電気的に接続された前記電子コンパス32及びアダプティブアレーアンテナ33a(33d)が備えられている。
【0045】
図4を参照して、先ず、探索要求スイッチ26(図7参照)の操作により、前記携帯機2から車両3に向け、該車両3から観た当該携帯機2の相対方向を探索(検出)させるための探索要求信号を送信する。すると、同車両3において、前記アダプティブアレーアンテナ33aによって、上記した電波の到来方向検出法を用い、探索要求信号(電波)の到来方向、即ち、車両3から観た携帯機2の相対方向β1(図5参照)が検出されるとともに、車両側制御部31によって、上記した式2におけるPout=0.5・E[|y(t)|2]の演算式に基づいて、その演算結果である出力電力Poutから、電波強度Ea[dBm]はPoutに略比例関係にあることから、探索要求信号(電波)の当該電波強度Eaが推定される。そして、該アレーアンテナ33aに電気的に接続された車両側制御部31に携帯機2の相対方向β1や電波強度Eaの各種情報が伝送される。ここでは、本来の探索要求信号に加えて、さらに該探索要求信号が建造物等の障害物や地面によって反射された反射波(図7参照)も車両3のアダプティブアレーアンテナ33aによって受信され、前記探索要求信号及びその反射波の各電波ごとに、携帯機2の相対方向β1が検出され、電波強度Eaが推定される。そして、携帯機2の相対方向β1に基づいて後述する方法で演算される車両3の相対方向β2(図5参照)の情報を携帯機2の表示部25に表示することに加えて、該情報に前記電波強度Eaの情報が所定の表現手段によって同表示部25に表示される。
【0046】
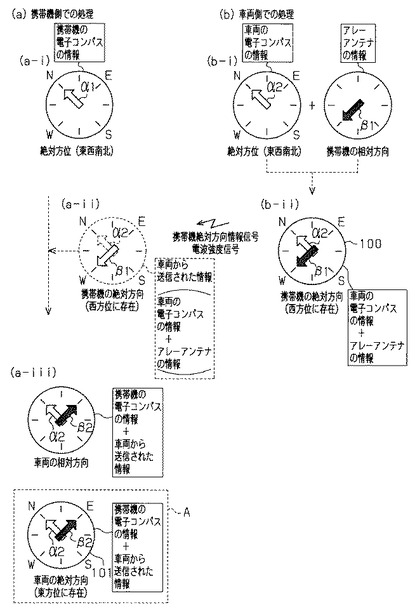
即ち、図5(a)及び図5(b)に示すように、同車両3において、前記携帯機2の相対方向β1の情報、及び、前記電子コンパス32によって検出された車両3から観た絶対方位(北方位)α2の情報(図5(b)の(b−i)参照)を用いることにより、当該電子コンパス32に電気的に接続された携帯機絶対方向演算手段としての車両側制御部31によって、車両3から観た携帯機2の絶対方向、即ち、東西南北の4方位を基準とする方位座標100上にマッピングされた、車両3から観た携帯機2の相対方向β1が演算されるとともに電波強度Eaが推定される(図5(b)の(b−ii)参照)。
【0047】
その後、該携帯機2の絶対方向の情報が、携帯機絶対方向情報信号及び電波強度信号として車両3から携帯機2に送信される(図4、図5(a)の(a−ii)参照)。
そして、同携帯機2において、車両3から送信された前記携帯機2の絶対方向の情報と、前記電子コンパス22によって検出された携帯機2から観た絶対方位(北方位)α1の情報(図5(a)の(a−i)参照)とを用いることにより、当該電子コンパス22に電気的に接続された車両方向演算手段としての携帯機側制御部21(図1参照)によって、携帯機2から観た車両3の相対方向β2(携帯機2の相対方向β1と180°逆方向になる。)及び電波強度Eaが演算される(図5(a)の(a−iii)参照)。
【0048】
これにより、同携帯機2において、当該携帯機2から観た車両3の相対方向β2が取得され、さらに携帯機側制御部21によって、図5(a)の(a−iii)に示すとおり、当該車両3の相対方向β2の情報がその電波方向を向く矢印(β2)の画像情報に変換されるとともに、同矢印(β2)の画像は、該制御部21に電気的に接続された表示部25(図1、図7参照)において、その電波強度Eaに比例した長さとなるように表示される。
【0049】
尚、図5(a)及び図5(b)においては、探索要求信号(電波)による車両3の相対方向β2の検出法及びその電波強度Eaの推定法についてのみ説明したが、前記した障害物による探索要求信号の反射波についても同様に、車両側制御部31において携帯機2の絶対方向の情報と看做される。そして、携帯機絶対方向情報信号及び電波強度信号として車両3から携帯機2に送信される。
【0050】
<車両検索システム1の動作フロー>
以下、図6のフローチャート及び図7を参照しながら、車両検索システム1の動作について説明する。
【0051】
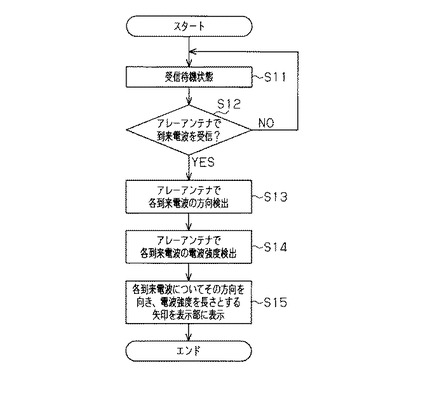
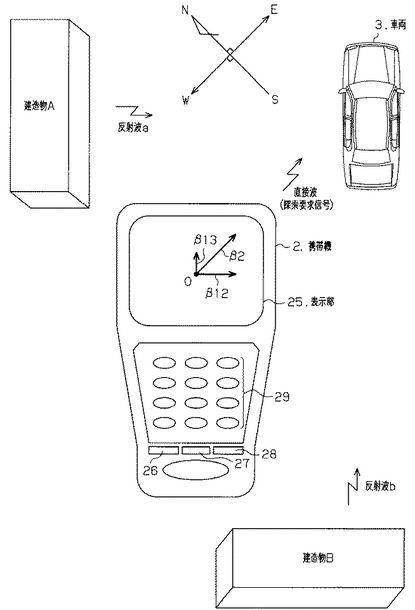
まず、ステップS11の受信待機状態において、図7に示すように、携帯機2の探索要求スイッチ26の操作により、携帯機2から車両3に向け、該車両3から観た当該携帯機2の相対方向を探索(検出)させるための探索要求信号を送信する(図4参照)。尚、図7に示す携帯機2は、携帯電話キーとされており、その操作面には探索要求スイッチ26、解錠スイッチ27、施錠スイッチ28、及び、複数の入力ボタン29,…が設けられている。
【0052】
すると、ステップS12において、車両3のアダプティブアレーアンテナ33a,33d(図1〜図3参照)によって、探索要求信号(電波)が受信されると(「Y」の場合)、ステップS13に進み、受信されないときは(「N」の場合)、ステップS11の受信待機状態が維持される。
【0053】
続くステップS13においては、上記した電波の到来方向検出法を用い、車両3において、直接波としての探索要求信号の到来方向、即ち、該探索要求信号に基づく車両3から観た携帯機2の相対方向β1、建造物A及び建造物Bによってそれぞれ反射された探索要求信号の反射波a及び反射波bの到来方向、即ち、該反射波a及び反射波bに基づく携帯機2の相対方向が検出される。
【0054】
さらにステップS14においては、車両3のアダプティブアレーアンテナ33a,33dの出力電力Poutに基づき、探索要求信号の電波強度Ea、及び、探索要求信号の反射波a及び反射波bの電波強度Eaが推定される。
【0055】
そして、ステップS15において、携帯機2にて、車両3の相対方向β2の情報が携帯機2の表示部25に表示されることに加えて、該情報に電波強度Eaの情報が所定の表現手段によって同表示部25に表示される。詳しくは、図7に示すように、車両3の相対方向β2がその方向を向く矢印(β2)の画像情報に変換されるとともに、同矢印(β2)の画像は、表示部25上の点Oを中心として、電波強度Eaに比例した長さとして同表示部25に表示される。またこのとき、探索要求信号の反射波a及び反射波bの到来方向に対応する携帯機2の相対方向β12及び携帯機2の相対方向β13も、電波強度Eaに比例した長さの矢印(β12,β13)として前記点Oを中心として表示される。この場合、携帯機2の相対方向β2、相対方向β12、及び相対方向β13に対応する各矢印(β2,β12,β13)は、各到来電波の電波強度Eaに応じた長さとなり、図7に示すように、矢印(β2)の長さ>矢印(β12)の長さ>矢印(β13)の長さとなる。
【0056】
尚、ここでは、携帯機側制御部21によって、車両3に到来する到来電波は、その電波強度Eaが所定閾値Ethを越えたか否かが判断され、越えた到来電波のみが、携帯機2の表示部25に矢印(β2,β12,β13)として表示されるように構成されている。
【0057】
このように、車両3の車載通信装置3aによって本来受信されるべき直接波としての探索要求信号に基づく携帯機2の相対方向β2が、最も長さの長い矢印(β2)として表示され、探索要求信号の反射波a及び反射波bによる、携帯機2の相対方向β12及び携帯機2の相対方向β13に対応する矢印(β12,β13)は、前記矢印(β2)よりも短い長さで表示される。これにより、複数の車両3の相対方向β2,β12,β13が表示部25に矢印(β2,β12,β13)として表示されている場合に、各到来電波の電波強度Eaの情報、即ち、各矢印(β2,β12,β13)の長さを表現手段として、携帯機2側において、正確な車両3の相対方向β2を信頼性高く認識することができるようになる。さらに、探索要求信号の反射波a及び反射波bによる車両3の相対方向検索への妨害効果は、携帯機2が車両3から離れる程大きくなるため、携帯機2と車両3との離間距離や相対位置を適宜変更しつつ、探索要求信号による検索回数を増やすことでさらに正確な車両3の相対方向β2への信頼性を高めることができる。
【0058】
本実施形態の車両検索システム1によれば、以下のような作用・効果を得ることができる。
(1)車両3にアダプティブアレーアンテナ33a,33dが設けられている場合において、携帯機2から送信される探索要求信号(電波)、反射波a、及び、反射波bに基づいて検出された、携帯機2から観た車両3の相対方向β2、相対方向β12、相対方向β13が、当該到来電波の各電波強度Eaの情報と共に、携帯機2の表示部25に矢印(β2,β12,β13)及び該各矢印(β2,β12,β13)の電波強度Eaに比例した長さとして表示される。このため、車両3のユーザは、それぞれが車両3の相対方向として表示部25に表示される複数の到来電波の内のいずれか一の電波が正確な車両3の相対方向β2を示しているかの信頼性の判断基準、即ち、同車両3の相対方向β2又は絶対方向の信頼性情報として、当該電波強度Eaの情報を用いることができる。これにより、携帯機2から到来する到来電波の方向に対応し、複数の車両3の相対方向β2,β12,β13が表示部25に矢印(β2,β12,β13)として表示されている場合に、当該信頼性情報としての各到来電波の電波強度Eaの情報、即ち、各矢印(β2,β12,β13)の長さを当該信頼性情報の表現手段として表示し、携帯機2側において、車両3の相対方向β2を信頼性高く認識することができるようになる。
【0059】
(2)携帯機2の表示部25が、到来電波の方向に対応する車両3の相対方向を矢印(β2,β12,β13)として表示するとともに、前記信頼性情報としての到来電波の電波強度Eaを当該矢印(β2,β12,β13)の長さを当該信頼性情報の表現手段として表示するようにしたので、携帯機2側において、車両3の相対方向、及び、当該車両3の相対方向の情報に対する信頼性について、視覚を通して簡単且つ確実に把握できるようになる。
【0060】
(3)複数のアンテナ素子♯1〜♯Kから入力される電波の位相を調節することで指向性ビームを自在に制御し、多様な指向性を作成することで電波の到来方向が検出できるアダプティブアレーアンテナ33a,33dを車両3に設けられた携帯機相対方向検出手段として用いる。このため、電波の到来方向、即ち、車両3から観た携帯機2の相対方向β1を容易且つ確実に検出することができる。しかも、アダプティブアレーアンテナ33a,33dは、車両3の1箇所に集中して設けることで、電波の到来方向が検出できるので、携帯機相対方向検出手段の構成が簡単化できる。
【0061】
[第2実施形態]
図8に示すように、本実施形態の車両検索システム1aは、車両3に設けられた車載通信装置3aにおいて、受信回路33と車両側制御部31との間に、誤り訂正部33eと品質評価部33fとが並列状態で接続されている以外は、第1実施形態の車両検索システム1と同様の構成であるので、対応する箇所には同一の符号を付することとし、以下、第1実施形態と異なる箇所について説明する。
【0062】
前記誤り訂正部33eは、携帯機2から車両3に向けて送信され、ハミング符号で符号化されている電波信号Xをアダプティブアレーアンテナ33a,33d及び受信回路33を介して受信し、該電波信号Xに対し、検査行列Hを乗算することによりビット・エラー(符合誤り)の判定を行い、判定結果に基づいて誤り訂正を行う誤り訂正処理を行って誤り訂正後の電波信号Yを車両側制御部31及び品質評価部33fに出力する。品質評価部33fでは、誤り訂正前の電波信号Xと誤り訂正後の電波信号Yとの差信号Z(Z=X−Y)を算出し、Zに含まれる情報量の基本単位であるビットが1である箇所の総数を、電波信号X,Yの総ビット数で除算することでエラーレイト(符号誤り率)を算出し、当該エラーレイトが所定閾値を超えている場合に受信電波の品質が悪いと判断し、それ以外の場合には受信電波の品質が良好であるとして当該電波の品質評価を行った結果としての品質評価結果信号を車両側制御部31に出力する。
【0063】
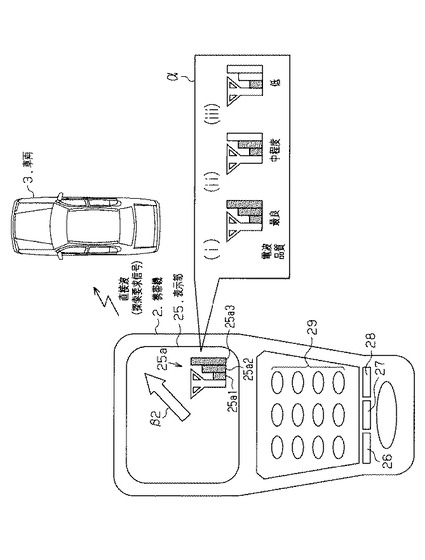
本実施形態において、携帯機2の表示部25は、携帯機側制御部21によって制御され、同携帯機2から車両3に送信される複数の電波の内、電波強度Eaが最大の電波(ここでは、探索要求信号とする。)に対応する携帯機2の相対方向β1の情報から得られる車両3の相対方向β2を矢印(β2)として表示するとともに、当該探索要求信号を搬送する電波の品質に応じて変更されるアンテナ画像25a(図10参照)を表示するように構成されている。
【0064】
しかも、前記表示部25は、携帯機側制御部21によって制御され、前記電波強度Eaが最大の電波である探索要求信号と、同電波強度Eaが2番目に大きな電波(ここでは、反射波aとする。)に基づく電波との電波強度比が所定比率(ここでは、1.2である。)以上である場合には、前記矢印(β2)を第1の色彩である赤にて表示する一方、同電波強度比が当該所定比率未満である場合には、同矢印(β2)を第2の色彩である青にて表示するように構成されている。
【0065】
尚、本実施形態では、携帯機側制御部21によって制御され、車両3に到来する到来電波は、その電波強度Eaが所定閾値Ethを越えたもののみが、携帯機2の表示部25に矢印(β2)として表示されるように構成されている。
【0066】
<車両検索システム1aの動作フロー>
以下、図9のフローチャート並びに図10を参照しながら、車両検索システム1aの動作について説明する。尚、ここは、携帯機2は、図7に示す状態と同じ状態にあることを想定している。
【0067】
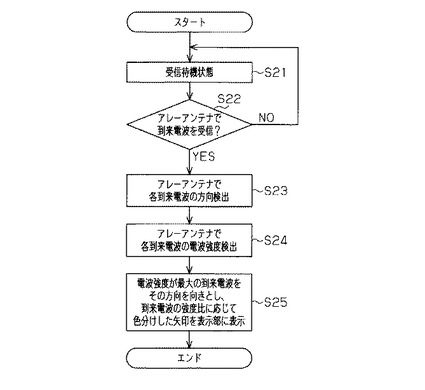
ここで、ステップS21〜ステップS24については、第1実施形態のステップS11〜ステップS14と同様であり、説明を省略する。
そして、ステップS25において、携帯機2にて、携帯機側制御部21によって制御され、車両3の相対方向の情報が携帯機2の表示部25に表示されることに加え、該情報に電波強度Eaの情報が所定の表現手段によって同表示部25に表示される。詳しくは、図10に示すように、車両3の相対方向β2がその方向を向く矢印(β2)の画像情報に変換されるとともに、当該矢印(β2)の画像が表示部25に表示される。ここでは、電波強度Eaが最大の電波は、車両3の相対方向β2に対応する探索要求信号であって、当該電波強度Eaが最大の電波である探索要求信号と、同電波強度Eaが2番目に大きな電波を反射波aとして、同反射波a(図7参照)との電波強度比が前記所定比率(ここでは、1.2である。)以上となっている状態を想定している。従って、前記矢印(β2)は第1の色彩である赤にて表示される。
【0068】
尚、このステップS25で、前記電波強度Eaが最大の電波である探索要求信号と、同電波強度Eaが2番目に大きな電波である反射波a(図7参照)との電波強度比が前記所定比率未満(具体的には、1.0を越え、1.2未満)となっている場合では、前記矢印(β2)は第2の色彩である青にて表示される。
【0069】
さらに、ステップS25では、携帯機2の表示部25に電波強度Eaが最大の電波である探索要求信号の品質に応じて変更されるアンテナ画像25aが表示される。具体的には、携帯機側制御部21が、車載通信装置3aから車両側制御部31に出力された品質評価結果信号に対応する情報信号を、車両3と携帯機2との無線通信を介して受信することで、該情報信号に基づいて、当該電波の品質が最良と評価される場合には、アンテナ画像25aの3つの表示バー25a1,25a2,25a3を全て点灯させ、以下、電波の品質の低下に伴って各表示バー25a1,25a2,25a3を順次消灯させる。詳しくは、品質が最良の場合:表示バー25a1,25a2,25a3の全てが点灯(図10のα内の(i)参照)し、品質が中程度の場合:表示バー25a1,25a2が点灯(図10のα内の(ii)参照)し、品質が低いとき:表示バー25a1が点灯(図10のα内の(iii)参照)する。
【0070】
本実施形態の車両検索システム1aによれば、以下のような作用・効果を得ることができる。
(4)携帯機2の表示部25が、携帯機2から車両3に送信される複数の電波の内、電波強度Eaが最大である電波によって取得される携帯機2の相対方向β1の情報に対応する車両3の相対方向β2を矢印(β2)として表示するようにした。しかも、当該電波強度Eaが最大の電波と、同電波強度Eaが2番目に大きな電波との電波強度比を前記車両3の相対方向β2又は絶対方向の信頼性情報とし、当該電波強度比が所定比率以上である場合には、同矢印(β2)を第1の色彩である赤にて表示する一方、同電波強度比が当該所定比率未満である場合には、同矢印(β2)を第2の色彩である青にて表示するようにした。これにより、携帯機2から到来する到来電波の方向に対応し、車両3の相対方向β2が表示部25に赤の矢印(β2)として表示されている場合に、各電波強度Eaの情報、即ち、各矢印(β2)の当該色彩を当該信頼性情報の表現手段とすることができ、携帯機2側において、車両3の相対方向β2を信頼性高く認識することができるようになる。
【0071】
(5)携帯機2の表示部25に、電波強度Eaが最大である電波の品質をさらに前記車両の相対方向β2又は絶対方向の信頼性情報とし、当該信頼性情報としての品質に応じて変更されるアンテナ画像25aを当該信頼性情報の表現手段として表示するようにした。これにより、矢印(β2)の色彩のみならず、当該アンテナ画像25aによっても矢印(β2)に対応する電波への信頼性を認識することができるようになる。
【0072】
[第3実施形態]
図11に示すように、本実施形態の車両検索システム1bは、第1実施形態の車両検索システム1における携帯機2の受信回路24のアンテナ24aが、車両3のアダプティブアレーアンテナ33a,33dと同様な構成であり、車両相対方向検出手段として機能するアダプティブアレーアンテナ24b,24cに置換されている以外は、第1実施形態の車両検索システム1と同様の構成であるので、対応する箇所には同一の符号を付することとし、以下、第1実施形態と異なる箇所について説明する。
【0073】
<車両検索システム1bの動作フロー>
以下、図12のフローチャート並びに図13(a)及び図13(b)を参照しながら、車両検索システム1bの動作について説明する。尚、ここは、携帯機2は、図7に示す状態と同じ状態にあることを想定している。
【0074】
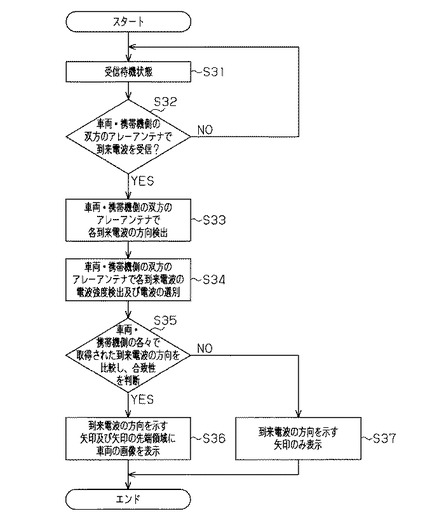
まず、ステップS31の受信待機状態において、図13(a)に示すように、携帯機2の探索要求スイッチ26の操作により、携帯機2から車両3に向け、該車両3から観た当該携帯機2の相対方向を探索(検出)させるための探索要求信号を送信する。このとき、車両3からは携帯機2に向けて同携帯機からIDコード信号を送信させるためのリクエスト信号が間欠的に送信されている。
【0075】
すると、ステップS32において、図13(a)に示すように、車両3のアダプティブアレーアンテナ33a,33dによって、到来電波としての探索要求信号が受信され、且つ、携帯機2のアダプティブアレーアンテナ24b,24cによって、到来電波としてのリクエスト信号が受信されると(「Y」の場合)、ステップS33に進み、受信されないときは(「N」の場合)、ステップS31の受信待機状態が維持される。
【0076】
続くステップS33においては、上記した電波の到来方向検出法を用い、車両3において、直接波としての探索要求信号の到来方向、即ち、該探索要求信号に基づく車両3から観た携帯機2の相対方向β1、建造物A及び建造物Bによってそれぞれ反射された探索要求信号の反射波a及び反射波b(図7参照)の到来方向、即ち、該反射波a及び反射波bに基づく携帯機2の相対方向が検出される。そして、これら各相対方向より、車両3側では、前記車両側制御部31によって携帯機2の絶対方向がそれぞれ演算され、取得される。一方、携帯機2側では、上記した電波の到来方向検出法を用い、アダプティブアレーアンテナ24b,24cによって、車両3から携帯機2に送信されたリクエスト信号の到来方向、即ち、該リクエスト信号に基づく車両3の相対方向、建造物等の障害物や地面によって反射されたリクエスト信号の反射波に基づく車両3の相対方向が検出される。
【0077】
さらにステップS34においては、車両3のアダプティブアレーアンテナ33a,33dの出力電力Pout、及び、携帯機2のアダプティブアレーアンテナ24b,24cの各出力電力Poutに基づき、探索要求信号及びリクエスト信号の電波強度Ea、及び、探索要求信号及びリクエスト信号の反射波の電波強度Eaが推定される。そして、車両3及び携帯機2において、前記車両側制御部31及び携帯機側制御部21によって、電波強度Eaが最大となる電波に対応する携帯機2の相対方向β1及び車両3の相対方向β23のみが選別される。そして、携帯機2側では、該車両3の相対方向β23に基づいて、前記携帯機側制御部21によって車両3の絶対方向が演算され、取得される。一方、車両3側では、前記携帯機2の相対方向β1に基づいて、前記車両側制御部31によって携帯機2の絶対方向が演算され、取得される。そして、携帯機絶対方向情報信号として車両3から携帯機2に送信される。
【0078】
続くステップS35においては、絶対方向合致性判断手段としての携帯機2の携帯機側制御部21において、車両3及び携帯機2で取得された車両3から観た携帯機2の絶対方向、及び、車両3の絶対方向が比較され、両絶対方向の合致性が判断される。具体的には、車両3のアダプティブアレーアンテナ33a,33d及び車両側制御部31の方が、携帯機2のアダプティブアレーアンテナ24b,24c及び携帯機側制御部21よりも大型で性能が良好である。このため、車両3のアダプティブアレーアンテナ33a,33dによって携帯機2の相対方向β1が検出され、該相対方向β1の情報に基づいて車両側制御部31によって演算された携帯機2の絶対方向の方が、携帯機2のアダプティブアレーアンテナ24b,24cによって車両3の相対方向β23が検出され、該相対方向β23の情報に基づいて携帯機側制御部21によって演算された車両3の絶対方向よりも精度が高いと考えられる。したがって、携帯機側制御部21においては、車両3において取得された携帯機2の絶対方向から携帯機側制御部21によって演算された車両3の絶対方向を基準方向とし、該基準方向からの携帯機2側で直接取得された車両3の絶対方向の角度θ(電波の到来角θ)のずれが所定角度範囲内(例えば、0[deg]≦θ≦3[deg])であるか否かが判断される。そして、両絶対方向の角度のずれが当該所定角度範囲内である場合には、合致していると判断され(「Y」の場合)、ステップS36に移行し、両絶対方向の角度のずれが当該所定角度範囲外である場合には、合致していないと判断され(「N」の場合)、ステップS37に移行する。
【0079】
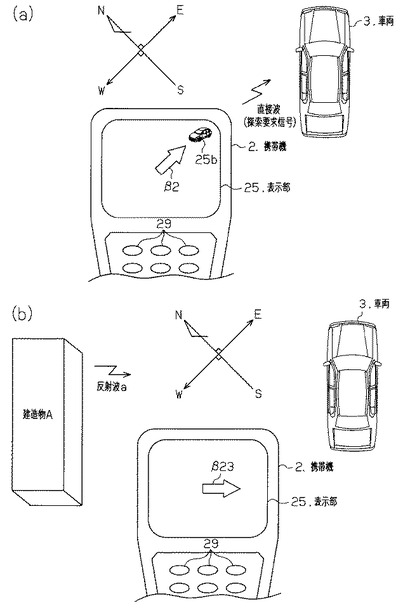
ステップS36では、図13(a)に示すように、携帯機2の表示部25は、携帯機2の相対方向β2を矢印(β2)として表示するとともに当該矢印(β2)の先端領域に車両3の画像25bを表示する。この場合は、車両3が、携帯機2から直接波としての探索要求信号を感度良好に受信している状態が想定される。
【0080】
一方、ステップS37では、図13(b)に示すように、表示部25は、車両3の画像25bを表示することなく、車両3の相対方向β23のみを矢印(β23)として表示する。この場合は、例えば、車両3が、携帯機2から建造物Aによる探索要求信号の反射波aを受信している状態が想定される。
【0081】
本実施形態の車両検索システム1cによれば、以下のような作用・効果を得ることができる。
(6)携帯機2の絶対方向と車両3の絶対方向との合致性を信頼性情報とし、車両3から観た携帯機2の絶対方向と、携帯機2から観た車両3の絶対方向とが合致したときに、車両3の相対方向の情報が携帯機2の表示部25に表示される。このため、車両3のユーザは、表示部25に表示される車両3の相対方向の信頼性の判断基準として、当該車両3の相対方向の情報自体を用いることができる。これにより、表示部25に表示される車両3の相対方向β2の情報自体(矢印(β2))が信頼性情報の表現手段となり、携帯機2側において、車両3の相対方向を簡単且つ信頼性高く認識することができるようになる。
【0082】
(7)携帯機2の表示部25が、携帯機2の絶対方向と車両3の絶対方向とが合致したときには、携帯機2の相対方向β2を矢印(β2)として表示するとともに当該矢印(β2)の先端領域に信頼性情報の表現手段である車両3の画像25bを表示する一方、携帯機2の絶対方向と車両3の絶対方向とが合致しないときには、車両3の画像25bを表示することなく矢印(β23)のみを表示するようにしたので、携帯機2側において、正確な車両3の相対方向β2を視覚を通して簡単且つ確実に把握できるようになる。
【0083】
尚、上記実施形態は以下のように変形してもよい。
・上記各実施形態では、2つのアダプティブアレーアンテナ33a,33dについて、直線状(リニア)に等間隔に配列したアンテナ素子♯1〜♯Kから構成したが、これに限られず、平面状に2次元配列した複数のアンテナ素子から構成することも可能である。これにより、単一のアダプティブアレーアンテナによって、360°範囲の方向(全方向)[(−180°≦θ≦180°)の方向]から到来する電波(平面波)を走査することが可能となる。
【0084】
・上記各実施形態では、車両3から携帯機2に送信された同車両3から観た携帯機2の絶対方向の情報と、携帯機2から観た絶対方位の情報とに基づき、当該携帯機2から観た車両3の相対方向β2を演算するように車両検索システム1,1a,1bを構成した。しかしこれに限られず、同情報に基づき、当該携帯機2から観た車両3の絶対方向、即ち、東西南北の4方位を基準とする方位座標101上にマッピングされた、携帯機2から観た車両3の相対方向β2(図5(a)の破線で囲んだ部分A参照)を携帯機側制御部21により演算するように前記制御プログラムを変更することも可能である。同構成によれば、車両3のユーザが、さらに東西南北の絶対方位の情報に基づき、携帯機2から観た車両3の方向をより的確に把握することができる。
【0085】
・上記各実施形態では、アダプティブアレーアンテナ33a,33dを使用した電波の到来方向検出法として、ビームフォーマ法を用いた。しかしこれに限られず、Capon法、より高角度分解能なMUSIC(Multiple Signal Classification:ミュージック)法、ESPRIT(Estimation of Signal Parameters via Rotational Invariance Techniques:エスプリ)法等の各種方法を用いることも可能である。
【0086】
・上記各実施形態では、第1絶対方位検出手段及び第2絶対方位検出手段として電子コンパスを用いたが、これに限られず、該第1絶対方位検出手段及び第2絶対方位検出手段としては、携帯機2又は車両3に既に設けられているGPS(Global Positioning System:全地球測位システム)装置を用いることもできる。
【0087】
・上記各実施形態では、車両3には、携帯機2の相対方向の情報と当該車両3から観た絶対方位の情報とに基づき、同車両3から観た携帯機2の絶対方向を演算する車両側制御部31(携帯機絶対方向演算手段)を設けた。そしてその一方で、携帯機2には、前記車両3から携帯機2に送信された当該携帯機2の絶対方向の情報と、電子コンパス22(第1絶対方位検出手段)により検出された当該携帯機2から観た絶対方位の情報とに基づき、同携帯機2から観た車両3の相対方向又は絶対方向を演算する携帯機側制御部21(車両方向演算手段)を設け、これにより携帯機2側で当該携帯機2から観た車両3の方向に関する情報を取得させるようにした。しかしこれに限られず、車両3の車両側制御部31を車両絶対方向演算手段とし、前記携帯機2の相対方向の情報と当該車両3から観た絶対方位の情報とに基づき、携帯機2から観た車両3の絶対方向を演算させるとともに、当該車両3の絶対方向の情報(この段階では、携帯機2においては、同携帯機2から観た車両3の方向は確定されていない。)を車両3から携帯機2に無線送信する。そして、当該情報と電子コンパス22(第1絶対方位検出手段)により検出された当該携帯機2から観た絶対方位の情報とに基づき、携帯機2側で当該携帯機2から観た車両3の方向に関する情報、即ち、車両3の相対方向又は絶対方向を携帯機側制御部21によって演算(この段階で、携帯機2において、同携帯機2から観た車両3の方向が確定される。)し、取得(表示)させることも可能である(このとき、車両3の絶対方向は、上記実施形態で演算された携帯機2の絶対方向とは180°逆方向になるように演算される)。この場合、上記実施形態と同様な効果が得られる。
【0088】
・上記各実施形態では、携帯機2による車両3の相対方向検索を妨害する電波として、探索要求信号の反射波a及び反射波bを想定したが、これに限られず、同種の携帯機2又は車両3から発信される同周波数帯の電波や、一般建造物から発信される同周波数帯の電波を想定することも勿論可能である。
【0089】
・上記第1及び第2実施形態では、車両3から観た携帯機2の相対方向を検出する相対方向検出手段としてのアダプティブアレーアンテナ33a,33dは、車両3にのみ設けるようにした。しかしこれに限られず、アダプティブアレーアンテナ24b,24cは、図14に示すように、携帯機2に設け、例えば、同携帯機2から観た車両3の相対方向の情報と、携帯機2から観た絶対方位の情報とに基づき、携帯機2の携帯機側制御部21において、同携帯機2から観た車両3の絶対方向を演算し、必要に応じて当該車両3の相対方向又は絶対方向を、例えば、矢印として表示部25に表示させるように構成することも可能である。
【0090】
・上記実施形態1では、車両の相対方向又は絶対方向の信頼性情報を、電波強度Eaの情報とするとともに、該信頼性情報の表現手段として、それぞれ、各矢印(β2,β12,β13)の長さを用いた。また、上記実施形態2では、車両の相対方向又は絶対方向の信頼性情報を、電波強度Eaが最大の電波と同電波強度Eaが2番目に大きな電波との電波強度比及び電波強度Eaが最大である電波の品質(エラーレイト)とするとともに、該信頼性情報の表現手段として、当各矢印(β2)の色彩及びアンテナ画像25aを用いた。さらに、上記実施形態3では、車両の相対方向又は絶対方向の信頼性情報を、携帯機2の絶対方向と車両3の絶対方向との合致性とするとともに、該信頼性情報の表現手段として、表示部25に表示される車両3の相対方向β2の情報自体(矢印(β2))及び車両3の画像25bを用いた。しかしこれに限られず、信頼性情報と該信頼性情報の表現手段とは自由に組み合わせることができる。即ち、例えば、前記信頼性情報として、電波強度Eaの情報とするとともに、該信頼性情報の表現手段として、各矢印の色彩を用いることもできる。さらには、前記信頼性情報として、携帯機2の絶対方向と車両3の絶対方向との合致性とするとともに、該信頼性情報の表現手段として、各矢印の長さを用いることもできる。
【0091】
さらに、前記した実施形態および変形例より把握できる技術的思想について以下に記載する。
○前記車両検索システムにおいて、前記第1絶対方位検出手段又は第2絶対方位検出手段がGPSである車両検索システム。同構成によれば、携帯機又は車両に方位を検知する電子コンパス等の手段を設けなくとも、携帯機又は車両に既に設けられているGPS装置を活用し、当該携帯機又は車両から観た絶対方位の情報を取得することが可能となる。
【0092】
○車両のユーザに所持される携帯機と当該車両との間で無線通信を行い、該通信の結果に基づいて携帯機から観た車両の方向を検索する車両検索システムであって、前記携帯機にそれぞれ設けられ、同携帯機から観た絶対方位を検出する第1絶対方位検出手段と、前記車両から送信される電波に基づいて、当該携帯機から観た車両の相対方向を検出する車両相対方向検出手段と、前記車両の相対方向の情報と前記携帯機から観た絶対方位の情報とに基づき、前記携帯機から観た車両の相対方向又は絶対方向を演算する車両絶対方向演算手段と、前記携帯機に到来する到来電波の電波強度を測定する電波強度測定手段と、前記車両の相対方向又は絶対方向の情報を表示することに加えて、前記各方向の情報に当該各方向の信頼性情報として前記電波強度の情報を所定の表現手段によって表示する表示手段とを備えたことを特徴とする車両検索システム。
【0093】
同構成によれば、携帯機側に車両相対方向検出手段が設けられている場合において、車両から送信される電波に基づいて検出された、携帯機から観た車両の相対方向又は絶対方向が、携帯機に到来する到来電波の電波強度の情報と共に携帯機の表示手段に表示される。このため、車両のユーザは、建造物等の障害物や地面によって反射される反射波を含み、それぞれが車両の相対方向又は絶対方向として表示手段に表示される複数の電波の内のいずれか一の電波が正確な車両の相対方向又は絶対方向を示しているかの信頼性の判断基準、即ち、同車両の相対方向又は絶対方向の信頼性情報として、当該電波強度の情報を用いることができる。これにより、車両から到来する到来電波の方向に対応し、複数の車両の相対方向又は絶対方向が表示手段に表示されている場合に、各到来電波の電波強度の情報を判断基準として、携帯機側において、車両の相対方向又は絶対方向を信頼性高く認識することができるようになる。
【図面の簡単な説明】
【0094】
【図1】本発明の第1実施形態に係る車両検索システムの電気的構成を示すブロック図。
【図2】本発明の第1実施形態に係るアダプティブアレーアンテナ(アレーアンテナ)の詳細構成図。
【図3】本発明の第1実施形態に係るアダプティブアレーアンテナによって、電波の到来方向が検出される状態を示す作用図。
【図4】車両と携帯機(車両のユーザ)との位置関係を示す模式図。
【図5】本発明の第1実施形態に係る車両検索システムにおいて、(a)は、携帯機側での処理を示す概念図、(b)は、車両側での処理を示す概念図。
【図6】本発明の第1実施形態に係る車両検索システムの動作を示すフローチャート図。
【図7】本発明の第1実施形態に係る車両検索システムの動作を説明する作用図。
【図8】本発明の第2実施形態に係る車両検索システムの電気的構成を示すブロック図。
【図9】本発明の第2実施形態に係る車両検索システムの動作を示すフローチャート図。
【図10】本発明の第2実施形態に係る車両検索システムの動作を説明する作用図(αはアンテナ画像の3つの表示状態を示す部分拡大図)。
【図11】本発明の第3実施形態に係る車両検索システムの電気的構成を示すブロック図。
【図12】本発明の第3実施形態に係る車両検索システムの動作を示すフローチャート図。
【図13】(a)は、本発明の第3実施形態に係る車両検索システムの動作を説明する作用図、(b)は、同車両検索システムの動作を説明する別の作用図。
【図14】本発明の変形例に係る車両検索システムの電気的構成を示すブロック図。
【符号の説明】
【0095】
1,1a,1b,1c…車両検索システム、2…携帯機、3…車両、21…携帯機側制御部、22…電子コンパス、25…表示部、31…車両側制御部、32…電子コンパス、24b,24c、33a,33d…アダプティブアレーアンテナ。
【技術分野】
【0001】
本発明は、自動車等の車両のユーザ(運転者等)に所持される携帯機と当該車両との間で無線通信を行い、該通信の結果に基づいて携帯機(ユーザ)から観た車両の方向を検索する車両検索システムに関する。
【背景技術】
【0002】
この種の車両検索システムには、所謂、移動体通信技術が利用されており、車両のユーザから観た車両の方向を安定に検索すべく、車両のユーザに所持される携帯機と車両に搭載された車載通信装置以外に、無線通信を中継する通信インフラ設備(案内端末、認識端末、管理コンピュータ等)を設けたものが知られている(例えば、特許文献1参照)。
【0003】
また、移動体通信技術において、そのような通信インフラ設備を使用しないものも知られている(例えば、特許文献2参照)。即ち、この技術では、車両が携帯機(始動キー)からの探索要求信号を受信すると、車両の地磁気センサ(方位検出手段)で検出した車両から観た絶対方位の情報(車両から観た、東西南北の4方位を基準とする方位の情報)を用い、東西南北の4方位を基準とする4種の方位識別信号(4種の方位識別コードで区別されている信号)を、それぞれ異なる方向に向くように車両の4箇所に設けた指向性アンテナから携帯機に送信する。
【0004】
そして、該携帯機においては、各方位識別信号の受信強度分布に基づいて当該携帯機から観た車両の相対方向や離間距離が検出(演算)されるとともに、携帯機の地磁気センサ(方位検出手段)で検出した携帯機から観た絶対方位の情報(携帯機から観た、東西南北の4方位を基準とする方位の情報)を用い、車両のユーザ(携帯機)から観た車両の方向の検索が行なわれるようになっている。
【0005】
ところが、前者の技術によれば、通信インフラ設備としての端末類を設置するためには、相当額の投資が必要となる。また、当然ながら、車両検索システムは、そのような通信インフラ設備が設置された限られた施設内でしか利用することができない。
【0006】
一方、後者の技術によれば、そのような通信インフラ設備が不要であることから、地下駐車場等の外来電波の遮断された空間を含む多様な場所で利用することができる。ところが、携帯機から観た車両の相対方向や離間距離の検出は、同携帯機における4種類の方位識別信号の受信強度に依存しているため、その受信強度が、車両の相対方向や離間距離以外の何らかの要因で変動するような場合、例えば、建造物等の障害物や地面での反射等の影響が無視できない場合には、車両の方向の検索が正確に行なわれないことが考えられる。
【0007】
さらに、この技術によれば、原理的に、車両側では当該車両から観た携帯機の方向に関する情報は持ち得ないことになる。
これに対し、本願出願人は、同種の移動体通信技術であって、先に車両の方向を多様な場所で正確に検索できる車両検索システムを開発している。
【0008】
当該技術では、車両側に携帯機の相対方向検出手段としてのアダプティブアレーアンテナと絶対方位検出手段としての電子コンパスを設けており、各手段によって検出された情報に基づいて車両側の携帯機絶対方向演算手段としての車両側制御部によって車両から観た携帯機の絶対方向を演算する。そして、携帯機側に設けた車両方向演算手段としての携帯機側制御部によって、車両から携帯機に送信された前記携帯機の絶対方向の情報と携帯機から観た絶対方位の情報とに基づいて携帯機から観た車両の相対方向を演算するようにしている。
【特許文献1】特開2005−350916号公報
【特許文献2】特開2006−125983号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
この技術によれば、通信インフラ設備が不要であり、さらに、携帯機から車両に送信する電波の受信強度が何らかの要因で変動するような場合、例えば、障害物や地面での反射等の影響が無視できない場合であっても、車両の方向の検索が正確に行えるという優れた効果が得られる。
【0010】
さらに、この技術の改良技術として、例えば、建造物等の障害物や地面での反射等の影響がある場合に、車両が携帯機から本来受信すべき直接波に加えて、それらの反射波等による影響を何らかの情報によって確認できれば、当該情報を携帯機の表示部に表示される車両の方向に対する信頼性の判断基準、即ち、車両の相対方向又は絶対方向の信頼性情報とすることができ、より高い信頼性の下で車両の方向を検索することができると考えられる。
【0011】
本発明は、上記問題点を解決するためになされたものであって、その目的は、車両の方向の情報と共に該情報の信頼性情報を用いることで、高い信頼性の下で車両の方向を検索できる車両検索システムを提供することにある。
【課題を解決するための手段】
【0012】
上記問題点を解決するために、請求項1に記載の発明は、車両のユーザに所持される携帯機と当該車両との間で無線通信を行い、該通信の結果に基づいて携帯機から観た車両の方向を検索する車両検索システムであって、前記携帯機に設けられ、同携帯機から観た絶対方位を検出する第1絶対方位検出手段と、前記車両にそれぞれ設けられ、前記携帯機から送信される電波に基づいて、当該車両から観た携帯機の相対方向を検出する携帯機相対方向検出手段と、当該車両から観た絶対方位を検出する第2絶対方位検出手段と、前記携帯機の相対方向の情報と前記車両から観た絶対方位の情報とに基づき、前記車両から観た携帯機の絶対方向を演算する携帯機絶対方向演算手段と、前記携帯機又は車両に設けられ、前記携帯機の絶対方向の情報と前記携帯機又は車両から観た絶対方位の情報とに基づき、前記携帯機から観た車両の相対方向又は絶対方向を演算する車両方向演算手段と、前記携帯機に設けられ、前記車両の相対方向又は絶対方向の情報を表示することに加えて、同各方向の信頼性情報を所定の表現手段によって表示する表示手段とを備えたこと、を要旨とする。
【0013】
同構成によれば、車両側に携帯機相対方向検出手段が設けられている場合において、携帯機から送信される電波に基づいて検出された、携帯機から観た車両の相対方向又は絶対方向が、同各方向の信頼性情報と共に携帯機の表示手段に表示される。このため、車両のユーザは、建造物等の障害物や地面によって反射される反射波等を含み、それぞれが車両の相対方向又は絶対方向として表示手段に表示される複数の到来電波の内のいずれか一の電波が正確な車両の相対方向又は絶対方向を示しているかの信頼性の判断基準として、同車両の相対方向又は絶対方向の信頼性情報を用いることができる。これにより、携帯機から到来する到来電波の方向に対応し、複数の車両の相対方向又は絶対方向が表示手段に表示されている場合に、当該信頼性情報を判断基準として、携帯機側において、車両の相対方向又は絶対方向を信頼性高く認識することができるようになる。
【0014】
請求項2に記載の発明は、請求項1に記載の車両検索システムにおいて、前記車両に設けられ、同車両に到来する到来電波の電波強度を測定する電波強度測定手段と、前記携帯機に設けられ、前記各方向の情報を表示することに加えて、前記各方向の信頼性情報として前記電波強度の情報を所定の表現手段によって表示する表示手段とを備えたこと、を要旨とする。
【0015】
同構成によれば、携帯機から到来する到来電波の方向に対応し、複数の車両の相対方向又は絶対方向が表示手段に表示されている場合に、信頼性情報としての各到来電波の電波強度の情報を判断基準として、携帯機側において、車両の相対方向又は絶対方向を信頼性高く認識することができるようになる。
【0016】
請求項3に記載の発明は、請求項2に記載の車両検索システムにおいて、前記表示手段は、前記車両の相対方向又は絶対方向を矢印として表示するとともに、前記信頼性情報としての電波強度を当該矢印の長さとして表示するようにしたこと、を要旨とする。
【0017】
同構成によれば、携帯機の表示手段が、到来電波の方向に対応する車両の相対方向又は絶対方向を矢印として表示するとともに、信頼性情報としての到来電波の電波強度を当該矢印の長さとして表示するようにしたので、携帯機側において、車両の相対方向又は絶対方向、及び、各相対方向又は絶対方向の情報に対する信頼性について、視覚を通して簡単且つ確実に把握できるようになる。
【0018】
請求項4に記載の発明は、請求項2又は請求項3に記載の車両検索システムにおいて、前記表示手段は、前記携帯機から車両に送信される複数の電波の内、前記電波強度が最大である電波によって取得される前記携帯機の相対方向又は絶対方向の情報に対応する車両の相対方向又は絶対方向を矢印として表示し、しかも、当該電波強度が最大である電波と、同電波強度が2番目に大きな電波との電波強度比を前記車両の相対方向又は絶対方向の信頼性情報とし、当該電波強度比が所定比率以上である場合には、同矢印を第1の色彩にて表示する一方、同電波強度比が当該所定比率未満である場合には、同矢印を第2の色彩にて表示するようにしたこと、を要旨とする。
【0019】
同構成によれば、携帯機の表示手段が、携帯機から車両に送信される複数の電波の内、電波強度が最大である電波によって取得される携帯機の相対方向の情報に対応する車両の相対方向を矢印として表示するようにした。しかも、当該電波強度が最大である電波と、同電波強度が2番目に大きな電波との電波強度比を前記車両の相対方向又は絶対方向の信頼性情報とし、当該電波強度比が所定比率以上である場合には、同矢印を第1の色彩にて表示する一方、同電波強度比が当該所定比率未満である場合には、同矢印を第2の色彩にて表示するようにした。これにより、携帯機から到来する到来電波の方向に対応し、車両の相対方向が表示部に第1の色彩の矢印として表示されている場合に、各電波強度の情報、即ち、各矢印の当該色彩を当該信頼性情報の表現手段として用いることができ、携帯機側において、車両の相対方向を信頼性高く認識することができるようになる。
【0020】
請求項5に記載の発明は、請求項4に記載の車両検索システムにおいて、前記表示手段は、前記電波強度が最大である電波の品質をさらに前記車両の相対方向又は絶対方向の信頼性情報とし、当該信頼性情報としての品質に応じて変更される画像をさらに表示するようにしたこと、を要旨とする。
【0021】
同構成によれば、携帯機の表示手段に、電波強度が最大である電波の品質をさらに前記車両の相対方向又は絶対方向の信頼性情報とし、当該信頼性情報としての品質に応じて変更される画像をさらに当該信頼性情報の表現手段として表示するようにした。これにより、矢印の色彩のみならず、当該画像によっても矢印に対応する電波への信頼性を認識することができるようになる。
【0022】
請求項6に記載の発明は、請求項1に記載の車両検索システムにおいて、前記携帯機又は車両に設けられ、前記携帯機の絶対方向と前記車両の絶対方向との合致性を判断する絶対方向合致性判断手段をさらに備え、前記携帯機の絶対方向と前記車両の絶対方向との合致性を前記信頼性情報とし、前記携帯機に設けられ、前記携帯機の絶対方向と前記車両の絶対方向とが合致したときに、前記車両の相対方向又は絶対方向の情報を表示する表示手段をさらに備えたこと、を要旨とする。
【0023】
同構成によれば、携帯機の絶対方向と車両の絶対方向との合致性を信頼性情報とし、車両から観た携帯機の絶対方向と、携帯機から観た車両の絶対方向とが合致したときに、車両の相対方向又は絶対方向の情報が携帯機の表示手段に表示される。このため、車両のユーザは、表示手段に表示される車両の相対方向又は絶対方向の信頼性の判断基準として、当該車両の相対方向又は絶対方向の情報自体を用いることができる。これにより、表示手段に表示される車両の相対方向又は絶対方向の情報自体が信頼性情報の表現手段となり、携帯機側において、車両の相対方向又は絶対方向を簡単且つ信頼性高く認識することができるようになる。
【0024】
請求項7に記載の発明は、請求項6に記載の車両検索システムにおいて、前記表示手段は、前記携帯機の絶対方向と前記車両の絶対方向とが合致したときには、前記携帯機の相対方向又は絶対方向を矢印として表示するとともに当該矢印の先端領域に前記車両の画像を表示する一方、前記携帯機の絶対方向と前記車両の絶対方向とが合致しないときには、前記車両の画像を表示することなく前記矢印のみを表示するようにしたこと、を要旨とする。
【0025】
同構成によれば、携帯機の表示手段が、携帯機の絶対方向と車両の絶対方向とが合致したときには、携帯機の相対方向又は絶対方向を矢印として表示するとともに当該矢印の先端領域に信頼性情報の表現手段として車両の画像を表示する一方、携帯機の相対方向と車両の相対方向とが合致しないときには、車両の画像を表示することなく矢印のみを表示するようにしたので、携帯機側において、正確な車両の相対方向を視覚を通して簡単且つ確実に把握できるようになる。
【0026】
請求項8に記載の発明は、請求項1〜請求項7のいずれか一項に記載の車両検索システムにおいて、前記車両及び携帯機相対方向検出手段が、アダプティブアレーアンテナであること、を要旨とする。
【0027】
同構成によれば、複数のアンテナ素子から入力される電波の振幅又は位相を調節することで指向性ビームを自在に制御し、多様な指向性を作成することで電波の到来方向が検出できるアダプティブアレーアンテナを車両に設けられた相対方向検出手段として用いる。このため、電波の到来方向、即ち、車両から観た携帯機の相対方向を容易且つ確実に検出することができる。しかも、アダプティブアレーアンテナは、車両の1箇所に集中して設けることで電波の到来方向が推定できるので、相対方向検出手段の構成が簡単化できる。
【発明の効果】
【0028】
本発明によれば、車両の方向の情報と共に該情報の信頼性情報を用いることで、高い信頼性の下で車両の方向を検索できる車両検索システムを提供することができる。
【発明を実施するための最良の形態】
【0029】
以下、本発明を具体化した実施形態について図面に従って説明する。
[第1実施形態]
<車両検索システム1の全体構成>
図1に示すように、本実施形態の車両検索システム1は、車両3のユーザにより所持される携帯機2と、車両3に搭載され、前記携帯機2との間で無線通信を行う車載通信装置3aとから構成されている。ここで携帯機2としては、例えば、専ら車両3の鍵として機能する電波キーや、車両3の鍵と携帯電話とが兼用化された携帯電話キーが挙げられるが、本実施形態では、後者の携帯電話キーを想定している(図7参照)。
【0030】
前記携帯機2は、車載通信装置3aに向けてアンテナ23aを介して電波(IDコード信号等)を送信する送信回路23と、車載通信装置3aから送信される電波(リクエスト信号等)をアンテナ24aを介して受信する受信回路24と、該送信回路23及び受信回路24に電気的に接続され、両回路23,24の送受信状態を制御する携帯機側制御部21とを備えている。尚、ここで、IDコード信号及びリクエスト信号は、携帯機2と車両3との間において、IDコード認証のために送受信されるものである。
【0031】
前記携帯機側制御部21には、携帯機2に設けられ、車両3のドアを遠隔で施解錠するために操作される解錠スイッチ27及び施錠スイッチ28が電気的に接続されている。該携帯機側制御部21には、さらに、携帯機2に設けられ、車載通信装置3aから後述する所定の情報を送信させるための探索要求スイッチ26が電気的に接続されている。該携帯機側制御部21には、さらに、携帯機2にそれぞれ設けられ、携帯機2から観た絶対方位を検出する第1絶対方位検出手段としての電子コンパス22と、後述する所定の情報を表示させる表示手段としての表示部25とが電気的に接続されている。ここで、表示部25は、小型の液晶パネル装置によって構成されている。
【0032】
そして、前記携帯機側制御部21は、前記各回路23,24、各スイッチ26〜28、表示部25、電子コンパス22の各動作を制御する制御プログラムを格納するとともに、必要なデータを記憶したメモリ21aを備えている。
【0033】
一方、前記車載通信装置3aは、携帯機2に向けてアンテナ34aを介して電波(リクエスト信号等)を送信する送信回路34と、携帯機2から送信される電波(IDコード信号等)を直接的に受信し、車両3から観た携帯機2の相対方向を検出する携帯機相対方向検出手段、及び、携帯機2から直接的に送信される電波を含んで車両3に到来する到来電波の電波強度を測定する電波強度測定手段としてのアダプティブアレーアンテナ(アレーアンテナ)33a(アンテナ素子♯1,…,アンテナ素子♯k,…,アンテナ素子♯K)及びアダプティブアレーアンテナ33d(アンテナ素子♯1,…,アンテナ素子♯k,…,アンテナ素子♯K)と、該アダプティブアレーアンテナ33a,33dを介して前記電波を受信する受信回路33と、該送信回路34及び受信回路33に電気的に接続され、両回路34,33の送受信状態を制御する車両側制御部31とを備えている。
【0034】
前記車両側制御部31には、さらに、車載通信装置3aに設けられ、車両3から観た絶対方位を検出する第2絶対方位検出手段としての電子コンパス32と、車両3に設けられ、同車両3のドアの施解錠装置(図示せず)の施解錠状態を制御するドアロック装置35とが電気的に接続されている。
【0035】
そして、前記車両側制御部31は、前記各回路33,34、ドアロック装置35、電子コンパス32の各動作を制御する制御プログラムを格納するとともに、必要なデータを記憶したメモリ31aを備えている。
【0036】
<アダプティブアレーアンテナ33a,33dの構成>
前記各アダプティブアレーアンテナ33a,33dは、図2を参照して、K個(複数)のアンテナ素子によって構成されている。具体的には、直線状(リニア)に等間隔に配列されたアンテナ素子♯1,…,アンテナ素子♯k,…,アンテナ素子♯K(K≧k≧2)から構成されている。該各アダプティブアレーアンテナ33a,33dは、それぞれ180°の角度範囲のみ走査され、両者で相補的に360°範囲の方向(全方向)が走査されるようになっている。尚、各アレーアンテナ33a,33dは、このように走査範囲が異なるのみで構造は同一であるので、対応する箇所についての説明は省略することとし、以下、アダプティブアレーアンテナ33aについてのみ説明する。
【0037】
前記各アンテナ素子♯1,…,♯k,…,♯Kは、それぞれ、位相調整回路δ1,…,δk,…δKを介して各アンテナ素子♯1〜♯Kからの出力を前記位相調整回路δ1〜δKによる所定の処理を経て加算する加算器33bに電気的に接続されている。そして、該加算器33bには、前記加算した出力と後述する重み付け係数w1〜wKとに基づき、前記位相調整回路δ1〜δKを制御して前記各アンテナ素子♯1〜♯Kの指向性ビームの位相を所定角度θ(−90°≦θ≦90°)に揃える位相重み付け制御手段33cが電気的に接続されている。尚、これらの位相調整回路δ1〜δK、加算器33b、位相重み付け制御手段33cは、各アレーアンテナ33a,33dについて一組ずつ存在し、それぞれ、前記した受信回路33の一部を構成しており、前記メモリ31aに格納された制御プログラムによりそれらの各動作が制御される。
【0038】
<電波の到来方向検出法>
本実施形態の車両検索システム1は以上のように構成されており、以下、同車両検索システム1によって電波の到来方向を検出する方法について説明する。尚、ここでは、電波の到来方向検出法として、指向性ビームによる空間操作を行うビームフォーマ法を用いる。該ビームフォーマ法は、一様励振アレーアンテナであるアダプティブアレーアンテナ33a(33d)のメインビームを180°範囲の方向[(−90°≦θ≦90°)の方向]で走査し、その出力電力が大きくなる方向を探索する方法である。
【0039】
図3に示すように、今、電波(平面波)が角度θ(−90°≦θ≦90°)の方向から到来しているとする。同図において、xk(t)(k=1,2,…,K)は、携帯機相対方向検出手段及び電波強度測定手段であること以外に、さらに電波の到来方向推定手段でもあるアダプティブアレーアンテナ33aによる時刻tにおける受信信号、wk(k=1,2,…,K)は、各アンテナ素子♯k(k=1,2,…,K)における重み付け係数、dk(k=1,2,…,K)は、同図に示す基準点P(ベースライン上の基準点P)より測ったk(k=1,2,…,K)番目のアンテナ素子♯k(k=1,2,…,K)の位置(距離)をそれぞれ示す。
【0040】
この場合、アダプティブアレーアンテナ33a(各アンテナ素子♯1〜♯K)からの加算器33bを介した出力y(t)(t:時刻)は、下式(1)で表される。
[数1]
y(t)=WH・X(t) …式(1)
ここで、X(t)=[x1(t),x2(t),…,xK(t)]T、W(ウェイトベクトル)=[w1,w2,…,wK]Tであり、添え字のHは複素共役転置を示し、添え字のTは転置を示す。
【0041】
すると、アダプティブアレーアンテナ33aの出力電力Poutは、下式(2)で与えられる。
[数2]
Pout=0.5・E[|y(t)|2]=0.5・WH・Rxx・W …式(2)
ここで、Rxx(自己相関行列)=E[X(t)・XH(t)](E[]は時系列でサンプリングした値の平均をとることを意味する。)である。そして、アダプティブアレーアンテナ33a(各アンテナ素子♯1〜♯K)のメインビームを角度θに向けるべく、同相になるように位相を揃えるための共相条件より、前記各重み付け係数wk(k=1,2,…,K)を下式(3)のように設定する。
[数3]
wk=exp(-j・2π/λ・dk・sinθ)(k=1,2,…,K) …式(3)
次に、この角度θを−90°から90°まで変化させ、アダプティブアレーアンテナ33aの出力電力Pout(θ)のピークを探索する。
【0042】
上式(3)で示した重み付け係数wk(k=1,2,…,K)からなるウェイトベクトルWは、角度θを変数とするモードベクトルa(θ)と表記されるので、下式(4)が成立する。
[数4]
W=a(θ)=[exp(-j・2π/λ・d1・sinθ),…,exp(-j・2π/λ・dK・sinθ)] …式(4)
すると、アダプティブアレーアンテナ33aの出力電力Pout(θ)は、上式(2)より、下式(5)で示される。
[数5]
Pout(θ)=0.5・aH(θ)・Rxx・a(θ) …式(5)
したがって、本ビームフォーマ法による角度分布(角度スペクトラム)PBF(θ)は、この出力電力Pout(θ)を正規化することで、下式(6)として得られる。
[数6]
PBF(θ)=Pout/(aH(θ)・a(θ)/2)
=aH(θ)・Rxx・a(θ)/aH(θ)・a(θ) …式(6)
上式(6)において、角度θを−90°から90°まで変化させたときのPBF(θ)のピークの角度位置θp(−90°≦θp≦90°)から電波の到来方向が検出される。
【0043】
<車両3の相対方向検索法>
以下、本実施形態の車両検索システム1による、携帯機2から観た車両3の相対方向を検索する方法について説明する。
【0044】
ここでは、図4に示すように、車両3のユーザに所持された携帯機2と、当該車両3の位置関係について、車両3が携帯機2から観て東方位に位置している状態、即ち、携帯機2が車両3から観て西方位に位置している状態を設定する。ここで、携帯機2には前記アンテナ23aが備えられており、車両3には前記車両側制御部31及び該車両側制御部31に電気的に接続された前記電子コンパス32及びアダプティブアレーアンテナ33a(33d)が備えられている。
【0045】
図4を参照して、先ず、探索要求スイッチ26(図7参照)の操作により、前記携帯機2から車両3に向け、該車両3から観た当該携帯機2の相対方向を探索(検出)させるための探索要求信号を送信する。すると、同車両3において、前記アダプティブアレーアンテナ33aによって、上記した電波の到来方向検出法を用い、探索要求信号(電波)の到来方向、即ち、車両3から観た携帯機2の相対方向β1(図5参照)が検出されるとともに、車両側制御部31によって、上記した式2におけるPout=0.5・E[|y(t)|2]の演算式に基づいて、その演算結果である出力電力Poutから、電波強度Ea[dBm]はPoutに略比例関係にあることから、探索要求信号(電波)の当該電波強度Eaが推定される。そして、該アレーアンテナ33aに電気的に接続された車両側制御部31に携帯機2の相対方向β1や電波強度Eaの各種情報が伝送される。ここでは、本来の探索要求信号に加えて、さらに該探索要求信号が建造物等の障害物や地面によって反射された反射波(図7参照)も車両3のアダプティブアレーアンテナ33aによって受信され、前記探索要求信号及びその反射波の各電波ごとに、携帯機2の相対方向β1が検出され、電波強度Eaが推定される。そして、携帯機2の相対方向β1に基づいて後述する方法で演算される車両3の相対方向β2(図5参照)の情報を携帯機2の表示部25に表示することに加えて、該情報に前記電波強度Eaの情報が所定の表現手段によって同表示部25に表示される。
【0046】
即ち、図5(a)及び図5(b)に示すように、同車両3において、前記携帯機2の相対方向β1の情報、及び、前記電子コンパス32によって検出された車両3から観た絶対方位(北方位)α2の情報(図5(b)の(b−i)参照)を用いることにより、当該電子コンパス32に電気的に接続された携帯機絶対方向演算手段としての車両側制御部31によって、車両3から観た携帯機2の絶対方向、即ち、東西南北の4方位を基準とする方位座標100上にマッピングされた、車両3から観た携帯機2の相対方向β1が演算されるとともに電波強度Eaが推定される(図5(b)の(b−ii)参照)。
【0047】
その後、該携帯機2の絶対方向の情報が、携帯機絶対方向情報信号及び電波強度信号として車両3から携帯機2に送信される(図4、図5(a)の(a−ii)参照)。
そして、同携帯機2において、車両3から送信された前記携帯機2の絶対方向の情報と、前記電子コンパス22によって検出された携帯機2から観た絶対方位(北方位)α1の情報(図5(a)の(a−i)参照)とを用いることにより、当該電子コンパス22に電気的に接続された車両方向演算手段としての携帯機側制御部21(図1参照)によって、携帯機2から観た車両3の相対方向β2(携帯機2の相対方向β1と180°逆方向になる。)及び電波強度Eaが演算される(図5(a)の(a−iii)参照)。
【0048】
これにより、同携帯機2において、当該携帯機2から観た車両3の相対方向β2が取得され、さらに携帯機側制御部21によって、図5(a)の(a−iii)に示すとおり、当該車両3の相対方向β2の情報がその電波方向を向く矢印(β2)の画像情報に変換されるとともに、同矢印(β2)の画像は、該制御部21に電気的に接続された表示部25(図1、図7参照)において、その電波強度Eaに比例した長さとなるように表示される。
【0049】
尚、図5(a)及び図5(b)においては、探索要求信号(電波)による車両3の相対方向β2の検出法及びその電波強度Eaの推定法についてのみ説明したが、前記した障害物による探索要求信号の反射波についても同様に、車両側制御部31において携帯機2の絶対方向の情報と看做される。そして、携帯機絶対方向情報信号及び電波強度信号として車両3から携帯機2に送信される。
【0050】
<車両検索システム1の動作フロー>
以下、図6のフローチャート及び図7を参照しながら、車両検索システム1の動作について説明する。
【0051】
まず、ステップS11の受信待機状態において、図7に示すように、携帯機2の探索要求スイッチ26の操作により、携帯機2から車両3に向け、該車両3から観た当該携帯機2の相対方向を探索(検出)させるための探索要求信号を送信する(図4参照)。尚、図7に示す携帯機2は、携帯電話キーとされており、その操作面には探索要求スイッチ26、解錠スイッチ27、施錠スイッチ28、及び、複数の入力ボタン29,…が設けられている。
【0052】
すると、ステップS12において、車両3のアダプティブアレーアンテナ33a,33d(図1〜図3参照)によって、探索要求信号(電波)が受信されると(「Y」の場合)、ステップS13に進み、受信されないときは(「N」の場合)、ステップS11の受信待機状態が維持される。
【0053】
続くステップS13においては、上記した電波の到来方向検出法を用い、車両3において、直接波としての探索要求信号の到来方向、即ち、該探索要求信号に基づく車両3から観た携帯機2の相対方向β1、建造物A及び建造物Bによってそれぞれ反射された探索要求信号の反射波a及び反射波bの到来方向、即ち、該反射波a及び反射波bに基づく携帯機2の相対方向が検出される。
【0054】
さらにステップS14においては、車両3のアダプティブアレーアンテナ33a,33dの出力電力Poutに基づき、探索要求信号の電波強度Ea、及び、探索要求信号の反射波a及び反射波bの電波強度Eaが推定される。
【0055】
そして、ステップS15において、携帯機2にて、車両3の相対方向β2の情報が携帯機2の表示部25に表示されることに加えて、該情報に電波強度Eaの情報が所定の表現手段によって同表示部25に表示される。詳しくは、図7に示すように、車両3の相対方向β2がその方向を向く矢印(β2)の画像情報に変換されるとともに、同矢印(β2)の画像は、表示部25上の点Oを中心として、電波強度Eaに比例した長さとして同表示部25に表示される。またこのとき、探索要求信号の反射波a及び反射波bの到来方向に対応する携帯機2の相対方向β12及び携帯機2の相対方向β13も、電波強度Eaに比例した長さの矢印(β12,β13)として前記点Oを中心として表示される。この場合、携帯機2の相対方向β2、相対方向β12、及び相対方向β13に対応する各矢印(β2,β12,β13)は、各到来電波の電波強度Eaに応じた長さとなり、図7に示すように、矢印(β2)の長さ>矢印(β12)の長さ>矢印(β13)の長さとなる。
【0056】
尚、ここでは、携帯機側制御部21によって、車両3に到来する到来電波は、その電波強度Eaが所定閾値Ethを越えたか否かが判断され、越えた到来電波のみが、携帯機2の表示部25に矢印(β2,β12,β13)として表示されるように構成されている。
【0057】
このように、車両3の車載通信装置3aによって本来受信されるべき直接波としての探索要求信号に基づく携帯機2の相対方向β2が、最も長さの長い矢印(β2)として表示され、探索要求信号の反射波a及び反射波bによる、携帯機2の相対方向β12及び携帯機2の相対方向β13に対応する矢印(β12,β13)は、前記矢印(β2)よりも短い長さで表示される。これにより、複数の車両3の相対方向β2,β12,β13が表示部25に矢印(β2,β12,β13)として表示されている場合に、各到来電波の電波強度Eaの情報、即ち、各矢印(β2,β12,β13)の長さを表現手段として、携帯機2側において、正確な車両3の相対方向β2を信頼性高く認識することができるようになる。さらに、探索要求信号の反射波a及び反射波bによる車両3の相対方向検索への妨害効果は、携帯機2が車両3から離れる程大きくなるため、携帯機2と車両3との離間距離や相対位置を適宜変更しつつ、探索要求信号による検索回数を増やすことでさらに正確な車両3の相対方向β2への信頼性を高めることができる。
【0058】
本実施形態の車両検索システム1によれば、以下のような作用・効果を得ることができる。
(1)車両3にアダプティブアレーアンテナ33a,33dが設けられている場合において、携帯機2から送信される探索要求信号(電波)、反射波a、及び、反射波bに基づいて検出された、携帯機2から観た車両3の相対方向β2、相対方向β12、相対方向β13が、当該到来電波の各電波強度Eaの情報と共に、携帯機2の表示部25に矢印(β2,β12,β13)及び該各矢印(β2,β12,β13)の電波強度Eaに比例した長さとして表示される。このため、車両3のユーザは、それぞれが車両3の相対方向として表示部25に表示される複数の到来電波の内のいずれか一の電波が正確な車両3の相対方向β2を示しているかの信頼性の判断基準、即ち、同車両3の相対方向β2又は絶対方向の信頼性情報として、当該電波強度Eaの情報を用いることができる。これにより、携帯機2から到来する到来電波の方向に対応し、複数の車両3の相対方向β2,β12,β13が表示部25に矢印(β2,β12,β13)として表示されている場合に、当該信頼性情報としての各到来電波の電波強度Eaの情報、即ち、各矢印(β2,β12,β13)の長さを当該信頼性情報の表現手段として表示し、携帯機2側において、車両3の相対方向β2を信頼性高く認識することができるようになる。
【0059】
(2)携帯機2の表示部25が、到来電波の方向に対応する車両3の相対方向を矢印(β2,β12,β13)として表示するとともに、前記信頼性情報としての到来電波の電波強度Eaを当該矢印(β2,β12,β13)の長さを当該信頼性情報の表現手段として表示するようにしたので、携帯機2側において、車両3の相対方向、及び、当該車両3の相対方向の情報に対する信頼性について、視覚を通して簡単且つ確実に把握できるようになる。
【0060】
(3)複数のアンテナ素子♯1〜♯Kから入力される電波の位相を調節することで指向性ビームを自在に制御し、多様な指向性を作成することで電波の到来方向が検出できるアダプティブアレーアンテナ33a,33dを車両3に設けられた携帯機相対方向検出手段として用いる。このため、電波の到来方向、即ち、車両3から観た携帯機2の相対方向β1を容易且つ確実に検出することができる。しかも、アダプティブアレーアンテナ33a,33dは、車両3の1箇所に集中して設けることで、電波の到来方向が検出できるので、携帯機相対方向検出手段の構成が簡単化できる。
【0061】
[第2実施形態]
図8に示すように、本実施形態の車両検索システム1aは、車両3に設けられた車載通信装置3aにおいて、受信回路33と車両側制御部31との間に、誤り訂正部33eと品質評価部33fとが並列状態で接続されている以外は、第1実施形態の車両検索システム1と同様の構成であるので、対応する箇所には同一の符号を付することとし、以下、第1実施形態と異なる箇所について説明する。
【0062】
前記誤り訂正部33eは、携帯機2から車両3に向けて送信され、ハミング符号で符号化されている電波信号Xをアダプティブアレーアンテナ33a,33d及び受信回路33を介して受信し、該電波信号Xに対し、検査行列Hを乗算することによりビット・エラー(符合誤り)の判定を行い、判定結果に基づいて誤り訂正を行う誤り訂正処理を行って誤り訂正後の電波信号Yを車両側制御部31及び品質評価部33fに出力する。品質評価部33fでは、誤り訂正前の電波信号Xと誤り訂正後の電波信号Yとの差信号Z(Z=X−Y)を算出し、Zに含まれる情報量の基本単位であるビットが1である箇所の総数を、電波信号X,Yの総ビット数で除算することでエラーレイト(符号誤り率)を算出し、当該エラーレイトが所定閾値を超えている場合に受信電波の品質が悪いと判断し、それ以外の場合には受信電波の品質が良好であるとして当該電波の品質評価を行った結果としての品質評価結果信号を車両側制御部31に出力する。
【0063】
本実施形態において、携帯機2の表示部25は、携帯機側制御部21によって制御され、同携帯機2から車両3に送信される複数の電波の内、電波強度Eaが最大の電波(ここでは、探索要求信号とする。)に対応する携帯機2の相対方向β1の情報から得られる車両3の相対方向β2を矢印(β2)として表示するとともに、当該探索要求信号を搬送する電波の品質に応じて変更されるアンテナ画像25a(図10参照)を表示するように構成されている。
【0064】
しかも、前記表示部25は、携帯機側制御部21によって制御され、前記電波強度Eaが最大の電波である探索要求信号と、同電波強度Eaが2番目に大きな電波(ここでは、反射波aとする。)に基づく電波との電波強度比が所定比率(ここでは、1.2である。)以上である場合には、前記矢印(β2)を第1の色彩である赤にて表示する一方、同電波強度比が当該所定比率未満である場合には、同矢印(β2)を第2の色彩である青にて表示するように構成されている。
【0065】
尚、本実施形態では、携帯機側制御部21によって制御され、車両3に到来する到来電波は、その電波強度Eaが所定閾値Ethを越えたもののみが、携帯機2の表示部25に矢印(β2)として表示されるように構成されている。
【0066】
<車両検索システム1aの動作フロー>
以下、図9のフローチャート並びに図10を参照しながら、車両検索システム1aの動作について説明する。尚、ここは、携帯機2は、図7に示す状態と同じ状態にあることを想定している。
【0067】
ここで、ステップS21〜ステップS24については、第1実施形態のステップS11〜ステップS14と同様であり、説明を省略する。
そして、ステップS25において、携帯機2にて、携帯機側制御部21によって制御され、車両3の相対方向の情報が携帯機2の表示部25に表示されることに加え、該情報に電波強度Eaの情報が所定の表現手段によって同表示部25に表示される。詳しくは、図10に示すように、車両3の相対方向β2がその方向を向く矢印(β2)の画像情報に変換されるとともに、当該矢印(β2)の画像が表示部25に表示される。ここでは、電波強度Eaが最大の電波は、車両3の相対方向β2に対応する探索要求信号であって、当該電波強度Eaが最大の電波である探索要求信号と、同電波強度Eaが2番目に大きな電波を反射波aとして、同反射波a(図7参照)との電波強度比が前記所定比率(ここでは、1.2である。)以上となっている状態を想定している。従って、前記矢印(β2)は第1の色彩である赤にて表示される。
【0068】
尚、このステップS25で、前記電波強度Eaが最大の電波である探索要求信号と、同電波強度Eaが2番目に大きな電波である反射波a(図7参照)との電波強度比が前記所定比率未満(具体的には、1.0を越え、1.2未満)となっている場合では、前記矢印(β2)は第2の色彩である青にて表示される。
【0069】
さらに、ステップS25では、携帯機2の表示部25に電波強度Eaが最大の電波である探索要求信号の品質に応じて変更されるアンテナ画像25aが表示される。具体的には、携帯機側制御部21が、車載通信装置3aから車両側制御部31に出力された品質評価結果信号に対応する情報信号を、車両3と携帯機2との無線通信を介して受信することで、該情報信号に基づいて、当該電波の品質が最良と評価される場合には、アンテナ画像25aの3つの表示バー25a1,25a2,25a3を全て点灯させ、以下、電波の品質の低下に伴って各表示バー25a1,25a2,25a3を順次消灯させる。詳しくは、品質が最良の場合:表示バー25a1,25a2,25a3の全てが点灯(図10のα内の(i)参照)し、品質が中程度の場合:表示バー25a1,25a2が点灯(図10のα内の(ii)参照)し、品質が低いとき:表示バー25a1が点灯(図10のα内の(iii)参照)する。
【0070】
本実施形態の車両検索システム1aによれば、以下のような作用・効果を得ることができる。
(4)携帯機2の表示部25が、携帯機2から車両3に送信される複数の電波の内、電波強度Eaが最大である電波によって取得される携帯機2の相対方向β1の情報に対応する車両3の相対方向β2を矢印(β2)として表示するようにした。しかも、当該電波強度Eaが最大の電波と、同電波強度Eaが2番目に大きな電波との電波強度比を前記車両3の相対方向β2又は絶対方向の信頼性情報とし、当該電波強度比が所定比率以上である場合には、同矢印(β2)を第1の色彩である赤にて表示する一方、同電波強度比が当該所定比率未満である場合には、同矢印(β2)を第2の色彩である青にて表示するようにした。これにより、携帯機2から到来する到来電波の方向に対応し、車両3の相対方向β2が表示部25に赤の矢印(β2)として表示されている場合に、各電波強度Eaの情報、即ち、各矢印(β2)の当該色彩を当該信頼性情報の表現手段とすることができ、携帯機2側において、車両3の相対方向β2を信頼性高く認識することができるようになる。
【0071】
(5)携帯機2の表示部25に、電波強度Eaが最大である電波の品質をさらに前記車両の相対方向β2又は絶対方向の信頼性情報とし、当該信頼性情報としての品質に応じて変更されるアンテナ画像25aを当該信頼性情報の表現手段として表示するようにした。これにより、矢印(β2)の色彩のみならず、当該アンテナ画像25aによっても矢印(β2)に対応する電波への信頼性を認識することができるようになる。
【0072】
[第3実施形態]
図11に示すように、本実施形態の車両検索システム1bは、第1実施形態の車両検索システム1における携帯機2の受信回路24のアンテナ24aが、車両3のアダプティブアレーアンテナ33a,33dと同様な構成であり、車両相対方向検出手段として機能するアダプティブアレーアンテナ24b,24cに置換されている以外は、第1実施形態の車両検索システム1と同様の構成であるので、対応する箇所には同一の符号を付することとし、以下、第1実施形態と異なる箇所について説明する。
【0073】
<車両検索システム1bの動作フロー>
以下、図12のフローチャート並びに図13(a)及び図13(b)を参照しながら、車両検索システム1bの動作について説明する。尚、ここは、携帯機2は、図7に示す状態と同じ状態にあることを想定している。
【0074】
まず、ステップS31の受信待機状態において、図13(a)に示すように、携帯機2の探索要求スイッチ26の操作により、携帯機2から車両3に向け、該車両3から観た当該携帯機2の相対方向を探索(検出)させるための探索要求信号を送信する。このとき、車両3からは携帯機2に向けて同携帯機からIDコード信号を送信させるためのリクエスト信号が間欠的に送信されている。
【0075】
すると、ステップS32において、図13(a)に示すように、車両3のアダプティブアレーアンテナ33a,33dによって、到来電波としての探索要求信号が受信され、且つ、携帯機2のアダプティブアレーアンテナ24b,24cによって、到来電波としてのリクエスト信号が受信されると(「Y」の場合)、ステップS33に進み、受信されないときは(「N」の場合)、ステップS31の受信待機状態が維持される。
【0076】
続くステップS33においては、上記した電波の到来方向検出法を用い、車両3において、直接波としての探索要求信号の到来方向、即ち、該探索要求信号に基づく車両3から観た携帯機2の相対方向β1、建造物A及び建造物Bによってそれぞれ反射された探索要求信号の反射波a及び反射波b(図7参照)の到来方向、即ち、該反射波a及び反射波bに基づく携帯機2の相対方向が検出される。そして、これら各相対方向より、車両3側では、前記車両側制御部31によって携帯機2の絶対方向がそれぞれ演算され、取得される。一方、携帯機2側では、上記した電波の到来方向検出法を用い、アダプティブアレーアンテナ24b,24cによって、車両3から携帯機2に送信されたリクエスト信号の到来方向、即ち、該リクエスト信号に基づく車両3の相対方向、建造物等の障害物や地面によって反射されたリクエスト信号の反射波に基づく車両3の相対方向が検出される。
【0077】
さらにステップS34においては、車両3のアダプティブアレーアンテナ33a,33dの出力電力Pout、及び、携帯機2のアダプティブアレーアンテナ24b,24cの各出力電力Poutに基づき、探索要求信号及びリクエスト信号の電波強度Ea、及び、探索要求信号及びリクエスト信号の反射波の電波強度Eaが推定される。そして、車両3及び携帯機2において、前記車両側制御部31及び携帯機側制御部21によって、電波強度Eaが最大となる電波に対応する携帯機2の相対方向β1及び車両3の相対方向β23のみが選別される。そして、携帯機2側では、該車両3の相対方向β23に基づいて、前記携帯機側制御部21によって車両3の絶対方向が演算され、取得される。一方、車両3側では、前記携帯機2の相対方向β1に基づいて、前記車両側制御部31によって携帯機2の絶対方向が演算され、取得される。そして、携帯機絶対方向情報信号として車両3から携帯機2に送信される。
【0078】
続くステップS35においては、絶対方向合致性判断手段としての携帯機2の携帯機側制御部21において、車両3及び携帯機2で取得された車両3から観た携帯機2の絶対方向、及び、車両3の絶対方向が比較され、両絶対方向の合致性が判断される。具体的には、車両3のアダプティブアレーアンテナ33a,33d及び車両側制御部31の方が、携帯機2のアダプティブアレーアンテナ24b,24c及び携帯機側制御部21よりも大型で性能が良好である。このため、車両3のアダプティブアレーアンテナ33a,33dによって携帯機2の相対方向β1が検出され、該相対方向β1の情報に基づいて車両側制御部31によって演算された携帯機2の絶対方向の方が、携帯機2のアダプティブアレーアンテナ24b,24cによって車両3の相対方向β23が検出され、該相対方向β23の情報に基づいて携帯機側制御部21によって演算された車両3の絶対方向よりも精度が高いと考えられる。したがって、携帯機側制御部21においては、車両3において取得された携帯機2の絶対方向から携帯機側制御部21によって演算された車両3の絶対方向を基準方向とし、該基準方向からの携帯機2側で直接取得された車両3の絶対方向の角度θ(電波の到来角θ)のずれが所定角度範囲内(例えば、0[deg]≦θ≦3[deg])であるか否かが判断される。そして、両絶対方向の角度のずれが当該所定角度範囲内である場合には、合致していると判断され(「Y」の場合)、ステップS36に移行し、両絶対方向の角度のずれが当該所定角度範囲外である場合には、合致していないと判断され(「N」の場合)、ステップS37に移行する。
【0079】
ステップS36では、図13(a)に示すように、携帯機2の表示部25は、携帯機2の相対方向β2を矢印(β2)として表示するとともに当該矢印(β2)の先端領域に車両3の画像25bを表示する。この場合は、車両3が、携帯機2から直接波としての探索要求信号を感度良好に受信している状態が想定される。
【0080】
一方、ステップS37では、図13(b)に示すように、表示部25は、車両3の画像25bを表示することなく、車両3の相対方向β23のみを矢印(β23)として表示する。この場合は、例えば、車両3が、携帯機2から建造物Aによる探索要求信号の反射波aを受信している状態が想定される。
【0081】
本実施形態の車両検索システム1cによれば、以下のような作用・効果を得ることができる。
(6)携帯機2の絶対方向と車両3の絶対方向との合致性を信頼性情報とし、車両3から観た携帯機2の絶対方向と、携帯機2から観た車両3の絶対方向とが合致したときに、車両3の相対方向の情報が携帯機2の表示部25に表示される。このため、車両3のユーザは、表示部25に表示される車両3の相対方向の信頼性の判断基準として、当該車両3の相対方向の情報自体を用いることができる。これにより、表示部25に表示される車両3の相対方向β2の情報自体(矢印(β2))が信頼性情報の表現手段となり、携帯機2側において、車両3の相対方向を簡単且つ信頼性高く認識することができるようになる。
【0082】
(7)携帯機2の表示部25が、携帯機2の絶対方向と車両3の絶対方向とが合致したときには、携帯機2の相対方向β2を矢印(β2)として表示するとともに当該矢印(β2)の先端領域に信頼性情報の表現手段である車両3の画像25bを表示する一方、携帯機2の絶対方向と車両3の絶対方向とが合致しないときには、車両3の画像25bを表示することなく矢印(β23)のみを表示するようにしたので、携帯機2側において、正確な車両3の相対方向β2を視覚を通して簡単且つ確実に把握できるようになる。
【0083】
尚、上記実施形態は以下のように変形してもよい。
・上記各実施形態では、2つのアダプティブアレーアンテナ33a,33dについて、直線状(リニア)に等間隔に配列したアンテナ素子♯1〜♯Kから構成したが、これに限られず、平面状に2次元配列した複数のアンテナ素子から構成することも可能である。これにより、単一のアダプティブアレーアンテナによって、360°範囲の方向(全方向)[(−180°≦θ≦180°)の方向]から到来する電波(平面波)を走査することが可能となる。
【0084】
・上記各実施形態では、車両3から携帯機2に送信された同車両3から観た携帯機2の絶対方向の情報と、携帯機2から観た絶対方位の情報とに基づき、当該携帯機2から観た車両3の相対方向β2を演算するように車両検索システム1,1a,1bを構成した。しかしこれに限られず、同情報に基づき、当該携帯機2から観た車両3の絶対方向、即ち、東西南北の4方位を基準とする方位座標101上にマッピングされた、携帯機2から観た車両3の相対方向β2(図5(a)の破線で囲んだ部分A参照)を携帯機側制御部21により演算するように前記制御プログラムを変更することも可能である。同構成によれば、車両3のユーザが、さらに東西南北の絶対方位の情報に基づき、携帯機2から観た車両3の方向をより的確に把握することができる。
【0085】
・上記各実施形態では、アダプティブアレーアンテナ33a,33dを使用した電波の到来方向検出法として、ビームフォーマ法を用いた。しかしこれに限られず、Capon法、より高角度分解能なMUSIC(Multiple Signal Classification:ミュージック)法、ESPRIT(Estimation of Signal Parameters via Rotational Invariance Techniques:エスプリ)法等の各種方法を用いることも可能である。
【0086】
・上記各実施形態では、第1絶対方位検出手段及び第2絶対方位検出手段として電子コンパスを用いたが、これに限られず、該第1絶対方位検出手段及び第2絶対方位検出手段としては、携帯機2又は車両3に既に設けられているGPS(Global Positioning System:全地球測位システム)装置を用いることもできる。
【0087】
・上記各実施形態では、車両3には、携帯機2の相対方向の情報と当該車両3から観た絶対方位の情報とに基づき、同車両3から観た携帯機2の絶対方向を演算する車両側制御部31(携帯機絶対方向演算手段)を設けた。そしてその一方で、携帯機2には、前記車両3から携帯機2に送信された当該携帯機2の絶対方向の情報と、電子コンパス22(第1絶対方位検出手段)により検出された当該携帯機2から観た絶対方位の情報とに基づき、同携帯機2から観た車両3の相対方向又は絶対方向を演算する携帯機側制御部21(車両方向演算手段)を設け、これにより携帯機2側で当該携帯機2から観た車両3の方向に関する情報を取得させるようにした。しかしこれに限られず、車両3の車両側制御部31を車両絶対方向演算手段とし、前記携帯機2の相対方向の情報と当該車両3から観た絶対方位の情報とに基づき、携帯機2から観た車両3の絶対方向を演算させるとともに、当該車両3の絶対方向の情報(この段階では、携帯機2においては、同携帯機2から観た車両3の方向は確定されていない。)を車両3から携帯機2に無線送信する。そして、当該情報と電子コンパス22(第1絶対方位検出手段)により検出された当該携帯機2から観た絶対方位の情報とに基づき、携帯機2側で当該携帯機2から観た車両3の方向に関する情報、即ち、車両3の相対方向又は絶対方向を携帯機側制御部21によって演算(この段階で、携帯機2において、同携帯機2から観た車両3の方向が確定される。)し、取得(表示)させることも可能である(このとき、車両3の絶対方向は、上記実施形態で演算された携帯機2の絶対方向とは180°逆方向になるように演算される)。この場合、上記実施形態と同様な効果が得られる。
【0088】
・上記各実施形態では、携帯機2による車両3の相対方向検索を妨害する電波として、探索要求信号の反射波a及び反射波bを想定したが、これに限られず、同種の携帯機2又は車両3から発信される同周波数帯の電波や、一般建造物から発信される同周波数帯の電波を想定することも勿論可能である。
【0089】
・上記第1及び第2実施形態では、車両3から観た携帯機2の相対方向を検出する相対方向検出手段としてのアダプティブアレーアンテナ33a,33dは、車両3にのみ設けるようにした。しかしこれに限られず、アダプティブアレーアンテナ24b,24cは、図14に示すように、携帯機2に設け、例えば、同携帯機2から観た車両3の相対方向の情報と、携帯機2から観た絶対方位の情報とに基づき、携帯機2の携帯機側制御部21において、同携帯機2から観た車両3の絶対方向を演算し、必要に応じて当該車両3の相対方向又は絶対方向を、例えば、矢印として表示部25に表示させるように構成することも可能である。
【0090】
・上記実施形態1では、車両の相対方向又は絶対方向の信頼性情報を、電波強度Eaの情報とするとともに、該信頼性情報の表現手段として、それぞれ、各矢印(β2,β12,β13)の長さを用いた。また、上記実施形態2では、車両の相対方向又は絶対方向の信頼性情報を、電波強度Eaが最大の電波と同電波強度Eaが2番目に大きな電波との電波強度比及び電波強度Eaが最大である電波の品質(エラーレイト)とするとともに、該信頼性情報の表現手段として、当各矢印(β2)の色彩及びアンテナ画像25aを用いた。さらに、上記実施形態3では、車両の相対方向又は絶対方向の信頼性情報を、携帯機2の絶対方向と車両3の絶対方向との合致性とするとともに、該信頼性情報の表現手段として、表示部25に表示される車両3の相対方向β2の情報自体(矢印(β2))及び車両3の画像25bを用いた。しかしこれに限られず、信頼性情報と該信頼性情報の表現手段とは自由に組み合わせることができる。即ち、例えば、前記信頼性情報として、電波強度Eaの情報とするとともに、該信頼性情報の表現手段として、各矢印の色彩を用いることもできる。さらには、前記信頼性情報として、携帯機2の絶対方向と車両3の絶対方向との合致性とするとともに、該信頼性情報の表現手段として、各矢印の長さを用いることもできる。
【0091】
さらに、前記した実施形態および変形例より把握できる技術的思想について以下に記載する。
○前記車両検索システムにおいて、前記第1絶対方位検出手段又は第2絶対方位検出手段がGPSである車両検索システム。同構成によれば、携帯機又は車両に方位を検知する電子コンパス等の手段を設けなくとも、携帯機又は車両に既に設けられているGPS装置を活用し、当該携帯機又は車両から観た絶対方位の情報を取得することが可能となる。
【0092】
○車両のユーザに所持される携帯機と当該車両との間で無線通信を行い、該通信の結果に基づいて携帯機から観た車両の方向を検索する車両検索システムであって、前記携帯機にそれぞれ設けられ、同携帯機から観た絶対方位を検出する第1絶対方位検出手段と、前記車両から送信される電波に基づいて、当該携帯機から観た車両の相対方向を検出する車両相対方向検出手段と、前記車両の相対方向の情報と前記携帯機から観た絶対方位の情報とに基づき、前記携帯機から観た車両の相対方向又は絶対方向を演算する車両絶対方向演算手段と、前記携帯機に到来する到来電波の電波強度を測定する電波強度測定手段と、前記車両の相対方向又は絶対方向の情報を表示することに加えて、前記各方向の情報に当該各方向の信頼性情報として前記電波強度の情報を所定の表現手段によって表示する表示手段とを備えたことを特徴とする車両検索システム。
【0093】
同構成によれば、携帯機側に車両相対方向検出手段が設けられている場合において、車両から送信される電波に基づいて検出された、携帯機から観た車両の相対方向又は絶対方向が、携帯機に到来する到来電波の電波強度の情報と共に携帯機の表示手段に表示される。このため、車両のユーザは、建造物等の障害物や地面によって反射される反射波を含み、それぞれが車両の相対方向又は絶対方向として表示手段に表示される複数の電波の内のいずれか一の電波が正確な車両の相対方向又は絶対方向を示しているかの信頼性の判断基準、即ち、同車両の相対方向又は絶対方向の信頼性情報として、当該電波強度の情報を用いることができる。これにより、車両から到来する到来電波の方向に対応し、複数の車両の相対方向又は絶対方向が表示手段に表示されている場合に、各到来電波の電波強度の情報を判断基準として、携帯機側において、車両の相対方向又は絶対方向を信頼性高く認識することができるようになる。
【図面の簡単な説明】
【0094】
【図1】本発明の第1実施形態に係る車両検索システムの電気的構成を示すブロック図。
【図2】本発明の第1実施形態に係るアダプティブアレーアンテナ(アレーアンテナ)の詳細構成図。
【図3】本発明の第1実施形態に係るアダプティブアレーアンテナによって、電波の到来方向が検出される状態を示す作用図。
【図4】車両と携帯機(車両のユーザ)との位置関係を示す模式図。
【図5】本発明の第1実施形態に係る車両検索システムにおいて、(a)は、携帯機側での処理を示す概念図、(b)は、車両側での処理を示す概念図。
【図6】本発明の第1実施形態に係る車両検索システムの動作を示すフローチャート図。
【図7】本発明の第1実施形態に係る車両検索システムの動作を説明する作用図。
【図8】本発明の第2実施形態に係る車両検索システムの電気的構成を示すブロック図。
【図9】本発明の第2実施形態に係る車両検索システムの動作を示すフローチャート図。
【図10】本発明の第2実施形態に係る車両検索システムの動作を説明する作用図(αはアンテナ画像の3つの表示状態を示す部分拡大図)。
【図11】本発明の第3実施形態に係る車両検索システムの電気的構成を示すブロック図。
【図12】本発明の第3実施形態に係る車両検索システムの動作を示すフローチャート図。
【図13】(a)は、本発明の第3実施形態に係る車両検索システムの動作を説明する作用図、(b)は、同車両検索システムの動作を説明する別の作用図。
【図14】本発明の変形例に係る車両検索システムの電気的構成を示すブロック図。
【符号の説明】
【0095】
1,1a,1b,1c…車両検索システム、2…携帯機、3…車両、21…携帯機側制御部、22…電子コンパス、25…表示部、31…車両側制御部、32…電子コンパス、24b,24c、33a,33d…アダプティブアレーアンテナ。
【特許請求の範囲】
【請求項1】
車両のユーザに所持される携帯機と当該車両との間で無線通信を行い、該通信の結果に基づいて携帯機から観た車両の方向を検索する車両検索システムであって、
前記携帯機に設けられ、同携帯機から観た絶対方位を検出する第1絶対方位検出手段と、
前記車両にそれぞれ設けられ、前記携帯機から送信される電波に基づいて、当該車両から観た携帯機の相対方向を検出する携帯機相対方向検出手段と、当該車両から観た絶対方位を検出する第2絶対方位検出手段と、前記携帯機の相対方向の情報と前記車両から観た絶対方位の情報とに基づき、前記車両から観た携帯機の絶対方向を演算する携帯機絶対方向演算手段と、
前記携帯機又は車両に設けられ、前記携帯機の絶対方向の情報と前記携帯機又は車両から観た絶対方位の情報とに基づき、前記携帯機から観た車両の相対方向又は絶対方向を演算する車両方向演算手段と、
前記携帯機に設けられ、前記車両の相対方向又は絶対方向の情報を表示することに加えて、同各方向の信頼性情報を所定の表現手段によって表示する表示手段とを備えたことを特徴とする車両検索システム。
【請求項2】
請求項1に記載の車両検索システムにおいて、
前記車両に設けられ、同車両に到来する到来電波の電波強度を測定する電波強度測定手段と、
前記携帯機に設けられ、前記各方向の情報を表示することに加えて、前記各方向の信頼性情報として前記電波強度の情報を所定の表現手段によって表示する表示手段とを備えたことを特徴とする車両検索システム。
【請求項3】
請求項2に記載の車両検索システムにおいて、
前記表示手段は、前記車両の相対方向又は絶対方向を矢印として表示するとともに、前記信頼性情報としての電波強度を当該矢印の長さとして表示するようにした車両検索システム。
【請求項4】
請求項2又は請求項3に記載の車両検索システムにおいて、
前記表示手段は、前記携帯機から車両に送信される複数の電波の内、前記電波強度が最大である電波によって取得される前記携帯機の相対方向又は絶対方向の情報に対応する車両の相対方向又は絶対方向を矢印として表示し、しかも、当該電波強度が最大である電波と、同電波強度が2番目に大きな電波との電波強度比を前記車両の相対方向又は絶対方向の信頼性情報とし、当該電波強度比が所定比率以上である場合には、同矢印を第1の色彩にて表示する一方、同電波強度比が当該所定比率未満である場合には、同矢印を第2の色彩にて表示するようにした車両検索システム。
【請求項5】
請求項4に記載の車両検索システムにおいて、
前記表示手段は、前記電波強度が最大である電波の品質をさらに前記車両の相対方向又は絶対方向の信頼性情報とし、当該信頼性情報としての品質に応じて変更される画像をさらに表示するようにした車両検索システム。
【請求項6】
請求項1に記載の車両検索システムにおいて、
前記携帯機又は車両に設けられ、前記携帯機の絶対方向と前記車両の絶対方向との合致性を判断する絶対方向合致性判断手段をさらに備え、
前記携帯機の絶対方向と前記車両の絶対方向との合致性を前記信頼性情報とし、前記携帯機に設けられ、前記携帯機の絶対方向と前記車両の絶対方向とが合致したときに、前記車両の相対方向又は絶対方向の情報を表示する表示手段をさらに備えたことを特徴とする車両検索システム。
【請求項7】
請求項6に記載の車両検索システムにおいて、
前記表示手段は、前記携帯機の絶対方向と前記車両の絶対方向とが合致したときには、前記携帯機の相対方向又は絶対方向を矢印として表示するとともに当該矢印の先端領域に前記車両の画像を表示する一方、前記携帯機の絶対方向と前記車両の絶対方向とが合致しないときには、前記車両の画像を表示することなく前記矢印のみを表示するようにした車両検索システム。
【請求項8】
請求項1〜請求項7のいずれか一項に記載の車両検索システムにおいて、
前記車両及び携帯機相対方向検出手段が、アダプティブアレーアンテナである車両検索システム。
【請求項1】
車両のユーザに所持される携帯機と当該車両との間で無線通信を行い、該通信の結果に基づいて携帯機から観た車両の方向を検索する車両検索システムであって、
前記携帯機に設けられ、同携帯機から観た絶対方位を検出する第1絶対方位検出手段と、
前記車両にそれぞれ設けられ、前記携帯機から送信される電波に基づいて、当該車両から観た携帯機の相対方向を検出する携帯機相対方向検出手段と、当該車両から観た絶対方位を検出する第2絶対方位検出手段と、前記携帯機の相対方向の情報と前記車両から観た絶対方位の情報とに基づき、前記車両から観た携帯機の絶対方向を演算する携帯機絶対方向演算手段と、
前記携帯機又は車両に設けられ、前記携帯機の絶対方向の情報と前記携帯機又は車両から観た絶対方位の情報とに基づき、前記携帯機から観た車両の相対方向又は絶対方向を演算する車両方向演算手段と、
前記携帯機に設けられ、前記車両の相対方向又は絶対方向の情報を表示することに加えて、同各方向の信頼性情報を所定の表現手段によって表示する表示手段とを備えたことを特徴とする車両検索システム。
【請求項2】
請求項1に記載の車両検索システムにおいて、
前記車両に設けられ、同車両に到来する到来電波の電波強度を測定する電波強度測定手段と、
前記携帯機に設けられ、前記各方向の情報を表示することに加えて、前記各方向の信頼性情報として前記電波強度の情報を所定の表現手段によって表示する表示手段とを備えたことを特徴とする車両検索システム。
【請求項3】
請求項2に記載の車両検索システムにおいて、
前記表示手段は、前記車両の相対方向又は絶対方向を矢印として表示するとともに、前記信頼性情報としての電波強度を当該矢印の長さとして表示するようにした車両検索システム。
【請求項4】
請求項2又は請求項3に記載の車両検索システムにおいて、
前記表示手段は、前記携帯機から車両に送信される複数の電波の内、前記電波強度が最大である電波によって取得される前記携帯機の相対方向又は絶対方向の情報に対応する車両の相対方向又は絶対方向を矢印として表示し、しかも、当該電波強度が最大である電波と、同電波強度が2番目に大きな電波との電波強度比を前記車両の相対方向又は絶対方向の信頼性情報とし、当該電波強度比が所定比率以上である場合には、同矢印を第1の色彩にて表示する一方、同電波強度比が当該所定比率未満である場合には、同矢印を第2の色彩にて表示するようにした車両検索システム。
【請求項5】
請求項4に記載の車両検索システムにおいて、
前記表示手段は、前記電波強度が最大である電波の品質をさらに前記車両の相対方向又は絶対方向の信頼性情報とし、当該信頼性情報としての品質に応じて変更される画像をさらに表示するようにした車両検索システム。
【請求項6】
請求項1に記載の車両検索システムにおいて、
前記携帯機又は車両に設けられ、前記携帯機の絶対方向と前記車両の絶対方向との合致性を判断する絶対方向合致性判断手段をさらに備え、
前記携帯機の絶対方向と前記車両の絶対方向との合致性を前記信頼性情報とし、前記携帯機に設けられ、前記携帯機の絶対方向と前記車両の絶対方向とが合致したときに、前記車両の相対方向又は絶対方向の情報を表示する表示手段をさらに備えたことを特徴とする車両検索システム。
【請求項7】
請求項6に記載の車両検索システムにおいて、
前記表示手段は、前記携帯機の絶対方向と前記車両の絶対方向とが合致したときには、前記携帯機の相対方向又は絶対方向を矢印として表示するとともに当該矢印の先端領域に前記車両の画像を表示する一方、前記携帯機の絶対方向と前記車両の絶対方向とが合致しないときには、前記車両の画像を表示することなく前記矢印のみを表示するようにした車両検索システム。
【請求項8】
請求項1〜請求項7のいずれか一項に記載の車両検索システムにおいて、
前記車両及び携帯機相対方向検出手段が、アダプティブアレーアンテナである車両検索システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】

【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2010−38684(P2010−38684A)
【公開日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願番号】特願2008−200812(P2008−200812)
【出願日】平成20年8月4日(2008.8.4)
【出願人】(000003551)株式会社東海理化電機製作所 (3,198)
【Fターム(参考)】
【公開日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願日】平成20年8月4日(2008.8.4)
【出願人】(000003551)株式会社東海理化電機製作所 (3,198)
【Fターム(参考)】
[ Back to top ]