
車両減速度制御装置
【課題】フェード現象やヴェイパーロック現象を抑制しつつ、ドライバに対して減速すべき状況であることを知らせることができる車両減速度制御装置を提供すること。
【解決手段】ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度と、エンジンブレーキを用いた減速度とを発生させることができる車両に搭載される車両減速度制御装置100であって、ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度を発生させて減速を開始するタイミングであるか否かを判定し(S10,S11)、減速を開始するタイミングであると判定された場合に、エンジンブレーキによって減速度を発生させることで減速を開始するタイミングであることを示す警報を行う(S13)。
【解決手段】ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度と、エンジンブレーキを用いた減速度とを発生させることができる車両に搭載される車両減速度制御装置100であって、ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度を発生させて減速を開始するタイミングであるか否かを判定し(S10,S11)、減速を開始するタイミングであると判定された場合に、エンジンブレーキによって減速度を発生させることで減速を開始するタイミングであることを示す警報を行う(S13)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の減速度を制御する車両減速度制御装置に関するものである。
【背景技術】
【0002】
従来、車両の減速度を制御する車両減速度制御装置の一例として、特許文献1に記載された車両走行制御装置がある。
【0003】
この車両走行制御装置は、衝突の可能性があると判定された場合に警報を発生させる。さらに、警報を発生させた後、自動ブレーキを作動させるか否かの判定処理を行い、自動ブレーキを作動させると判定された場合は自動ブレーキを作動させるものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3319229号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、警報を行なう際には、油圧や空気圧で動作するディスクブレーキやドラムブレーキを用いて車両に対して減速力を印加することで「減速すべき状況である」ことを示す警報を行うことが考えられる。しかしながら、ディスクブレーキやドラムブレーキは、使いすぎるとブレーキが利かなくなる現象(フェード現象やヴェイパーロック現象)が発生するという問題がある。
【0006】
本発明は、上記問題点に鑑みなされたものであり、フェード現象やヴェイパーロック現象を抑制しつつ、ドライバに対して減速すべき状況であることを知らせることができる車両減速度制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために請求項1に記載の車両減速度制御装置は、ディスクブレーキ及びドラムブレーキの少なくとも一方(以下、主ブレーキとも称する)を用いた減速度と、主ブレーキ以外の補助ブレーキを用いた減速度とを発生させることができる車両に搭載されるものである。この車両減速度制御装置は、主ブレーキを用いた減速度を発生させて減速を開始するタイミングであるか否かを判定する(減速開始タイミング判定手段)。そして、車両減速度制御装置は、主ブレーキを用いた減速度を発生させて減速を開始するタイミングであることを示す警報(すなわち、「減速開始タイミングを知らせる警報」、「減速開始すべき状況であることを知らせる警報」)を行うものである。
【0008】
さらに、車両減速度制御装置は、減速を開始するタイミングであると判定された場合に、補助ブレーキによって減速度を発生させることで、減速開始タイミングを知らせる警報を行う(警報手段)ことを特徴とするものである。つまり、補助ブレーキによって減速度を発生させて、車両のドライバに対して減速度を感じさせることによって警告を行うものである。
【0009】
このように、補助ブレーキを用いて警報を行うことによって、ディスクブレーキやドラムブレーキの使用頻度を減らすことができる。従って、ディスクブレーキやドラムブレーキにおけるフェード現象やヴェイパーロック現象を抑制しつつ、減速すべき状況であることを知らせることができる。
【0010】
また、補助ブレーキを用いて警報を行う際には、請求項2に示すように、補助ブレーキによる減速度を複数回発生させるようにしてもよい。つまり、車両のドライバに対して、減速度を複数回与えることによって、減速開始タイミングを知らせる警報を行う。
【0011】
例えば、補助ブレーキが発生可能な減速度(換言すると、減速度を発生させるための制動力)が比較的小さい場合もありうる。しかしながら、請求項2に示すようにすることによって、ドライバに対して減速度を感じさせやすくすることができる。従って、補助ブレーキが発生可能な減速度が比較的小さい場合であっても、減速すべき状況であることを知らせることができる。
【0012】
また、補助ブレーキによる減速度を複数回発生させる際には、請求項3に示すように、減速度の大きさ(換言すると、減速度を発生させるための制動力の大きさ)を段階的に大きくするようにしてもよい。
【0013】
このようにすることによって、同じ大きさの減速度を複数回発生させる場合よりも、ドライバに対して減速度を感じさせやすくすることができる。従って、減速すべき状況であることを知らせやすくすることができる。
【0014】
また、補助ブレーキによる減速度を複数回発生させる際には、請求項4に示すように、補助ブレーキによる減速度を不連続なタイミングで発生させるようにしてもよい。
【0015】
このようにすることによって、等間隔(時間的に等間隔)で補助ブレーキによる減速度を発生させる場合よりも、ドライバに対して減速度を感じさせやすくすることができる。従って、減速すべき状況であることを知らせやすくすることができる。
【0016】
なお、請求項5に示すように、補助ブレーキによる減速度を一回発生させることで、減速を開始するタイミングであることを示す警報を行うようにしてもよい。
【0017】
また、原動機としてガソリンエンジンを用いる車両は、ディスクブレーキ及びドラムブレーキの他に、エンジンブレーキによって減速度を発生させることができる。そこで、請求項6に示すように、原動機としてガソリンエンジンを用いる車両に車両減速度制御装置が搭載される場合、補助ブレーキとしては、エンジンブレーキを採用するようにしてもよい。
【0018】
また、原動機として電動モータを用いる車両は、ディスクブレーキ及びドラムブレーキの他に、回生ブレーキによって減速度を発生させることができる。そこで、請求項7に示すように、原動機として電動モータを用いる車両に車両減速度制御装置が搭載される場合、補助ブレーキとしては、回生ブレーキを採用するようにしてもよい。
【0019】
また、原動機として電動モータを用いる車両は、ディスクブレーキ及びドラムブレーキの他に、発電ブレーキによって減速度を発生させることができる。そこで、請求項8に示すように、原動機として電動モータを用いる車両に車両減速度制御装置が搭載される場合、補助ブレーキとしては、発電ブレーキを採用するようにしてもよい。
【0020】
また、原動機としてディーゼルエンジンを用いる車両は、ディスクブレーキ及びドラムブレーキの他に、排気ブレーキによって減速度を発生させることができる。そこで、請求項9に示すように、原動機としてディーゼルエンジンを用いる車両に車両減速度制御装置が搭載される場合、補助ブレーキとしては、排気ブレーキを採用するようにしてもよい。
【0021】
請求項6乃至9に示すように、ディスクブレーキやドラムブレーキとともに車両に設けられた、ディスクブレーキやドラムブレーキとは異なる減速度を発生させる手段(機能)を補助ブレーキとして用いることによって、特別に補助ブレーキを設ける必要がないので好ましい。
【図面の簡単な説明】
【0022】
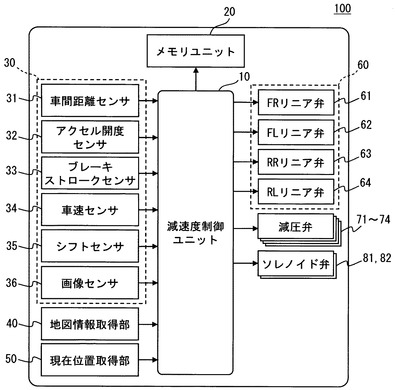
【図1】本発明の実施の形態における車両減速度制御装置の概略構成を示すブロック図である。
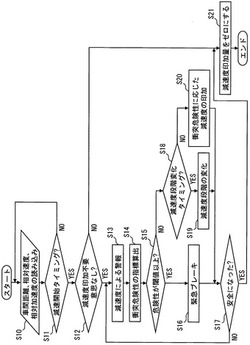
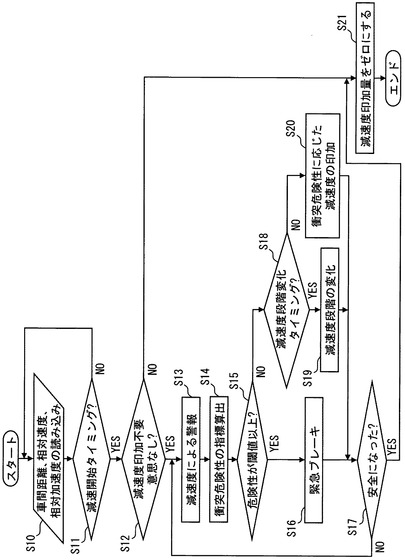
【図2】本発明の実施の形態における車両減速度制御装置の処理動作を示すフローチャートである。
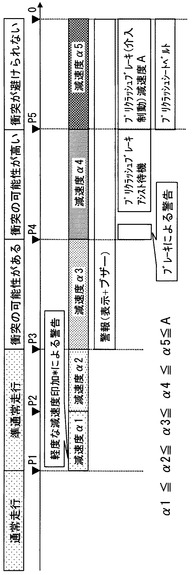
【図3】本発明の実施の形態における車両減速度制御装置における車両の状況と減速度との関係を示す説明図である。
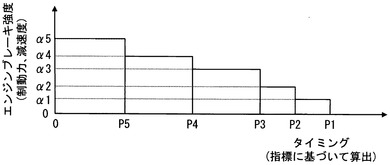
【図4】本発明の実施の形態における車両減速度制御装置における各減速度と各タイミングの関係を示すグラフである。
【発明を実施するための形態】
【0023】
以下、本発明の実施の形態を図に基づいて説明する。なお、本実施形態においては、本発明の車両減速度制御装置100(以下、減速度制御装置100とも称する)を原動機としてガソリンエンジンを用いる車両に搭載した例を採用する。詳細には、減速度制御装置100は、主ブレーキ(ここではドラムブレーキ)を用いた減速度(制動力、制動効果)と、主ブレーキ以外の補助ブレーキ(ここではエンジンブレーキ)を用いた減速度(制動力、制動効果)とを発生させることができる車両に搭載されるものである。換言すると、減速度制御装置100は、主ブレーキ(ここではドラムブレーキ)を用いた減速度を自車両に対して印加可能であるとともに、主ブレーキ以外の補助ブレーキ(ここではエンジンブレーキ)を用いた減速度を自車両に対して印加可能である車両に搭載されるものである。
【0024】
なお、主ブレーキとしては、ドラムブレーキの他にディスクブレーキを採用することもできる。つまり、減速度制御装置100は、ディスクブレーキを用いた減速度と、主ブレーキ以外の補助ブレーキを用いた減速度とを発生させることができる車両に搭載されるものであってもよい。
【0025】
また、主ブレーキとして、ドラムブレーキとディスクブレーキの両方を採用することもできる。つまり、減速度制御装置100は、例えば前輪に設けられたディスクブレーキ及び後輪に設けられたドラムブレーキを用いた減速度と、主ブレーキ以外の補助ブレーキを用いた減速度とを発生させることができる車両に搭載されるものであってもよい。
【0026】
また、減速度制御装置100は、ドラムブレーキを用いた減速度を発生させて減速を開始するタイミングP1であるか否かを判定する(減速開始タイミング判定手段)とともに、ドラムブレーキを用いた減速度を発生させて減速を開始するタイミングP1であることを示す警報(すなわち、「減速開始タイミングを知らせる警報」、「減速すべき状況であることを知らせる警報」)を行うものである。
【0027】
さらに、減速度制御装置100は、減速を開始するタイミングP1であると判定された場合に、エンジンブレーキによって減速度α1を発生させることで、減速開始タイミングを知らせる警報を行う(警報手段)。つまり、エンジンブレーキによって減速度α1を発生させて、車両のドライバに対して減速度α1を感じさせることによって警告を行うものである。
【0028】
なお、本実施形態における減速度制御装置100は、後ほど詳しく説明するが、自車両と先行車との状況(すなわち、先行車との衝突の可能性、数式1乃至数式6による指標)に応じて減速度(α1、α2、α3、α4、α5、A)を車両に印加する(図3,4参照)。減速度の大きさは、α1≦α2≦α3≦α4≦α5≦Aを満たすものである。また、減速度Aは、ドライバのブレーキ操作に応じて減速度制御装置100が発生させた減速度に、ドライバのブレーキ操作に関係なく減速度制御装置100が発生させる減速度α5を加えた値であり、本減速度制御装置が搭載された車両が自動で発生できる最大減速度である。
【0029】
本発明に係る減速度制御装置100は、図1に示すように、制御部をなす減速度制御ユニット10、及び減速度制御ユニット10に接続されたメモリユニット20、センサ部30、地図情報取得部40、現在位置取得部50、リニア弁部60、減圧弁71〜74、ソレノイド弁81,82などを備えて構成されている。
【0030】
減速度制御ユニット10は、周知のコンピュータとして構成されており、内部にはCPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、I/O(Input/Output)及びこれらの構成を接続するバスラインなどが備えられている。
【0031】
メモリユニット20には、減速度制御(制動制御)の際に用いる数式(後ほど説明する数式1〜数式6)などが格納されている。なお、減速度制御ユニット10は、この数式などに基づいて、各車輪に設けられた各ホイルシリンダ(ドラムブレーキ内)に接続された各リニア弁61〜64と各減圧弁71〜74、並びにソレノイド弁81,82をそれぞれ制御することで、ドラムブレーキによる制動制御を行う。さらに、減速度制御ユニット10は、この数式などに基づいて、エンジンブレーキによる制動制御を行う。
【0032】
なお、減速度制御装置100が搭載されている車両は、右側前輪、左側前輪、右側後輪、左側後輪の夫々に、ドラムブレーキ(主ブレーキであり、ホイルシリンダ、ブレーキシューなどを含む)が設けられており、これによって車両の制動を行う構成となっている。なお、ドラムブレーキ、各リニア弁61〜64、各減圧弁71〜74、ソレノイド弁81,82などを含む主ブレーキの構成及び動作は、周知技術であるため詳しい説明は省略する。
【0033】
センサ部30は、車間距離センサ31、アクセル開度センサ32、ブレーキストロークセンサ33、車速センサ34、シフトセンサ35、画像センサ36が含まれる。そして、減速度制御ユニット10には、これらの各センサ31〜36の各出力信号が供給される。
【0034】
車間距離センサ31は、先行車との距離(車間距離、相対距離xr)を検出し、この検出結果を示す出力信号を減速度制御ユニット10に出力する。車間距離センサ31は、例えばレーザーレーダ、ミリ波センサや画像センサなどを採用することができる。換言すると、減速度制御ユニット10は、先行車との車間距離を示す信号を取得する(車間距離取得手段)。つまり、減速度制御ユニット10は、車間距離センサ31からの出力信号に基づいて、先行車との車間距離を監視している。
【0035】
アクセル開度センサ32は、アクセル開度(アクセル操作量)を検出し、この検出結果を示す出力信号を減速度制御ユニット10に出力する。換言すると、減速度制御ユニット10は、アクセル開度を示す信号を取得する(アクセル開度取得手段)。つまり、減速度制御ユニット10は、アクセル開度センサ32からの出力信号に基づいて、アクセルペダルの操作状態を監視している。
【0036】
なお、減速度制御ユニット10は、アクセル開度センサ32の出力信号に基づいて、踏み込まれていたアクセルペダルが戻されたことを認識すると、アクセルペダルが戻されことを示す信号を図示していないエンジン制御ユニットに出力する。エンジン制御ユニットは、この信号に応じて、燃料、空気の供給を削減して、エンジン回転数を減少せしめ、この抵抗により制動力が生ずるエンジンブレーキ効果を発生させる。つまり、エンジンブレーキは、加速時とは逆に車輪でエンジンを回し、エンジンの回転抵抗を利用して減速することである。
【0037】
なお、上述のように、本実施形態における減速度制御装置100は、減速を開始するタイミングP1であると判定された場合に、エンジンブレーキによって減速度を発生させることで、減速開始タイミングP1を知らせる警報を行うものである。よって、減速度制御装置100は、減速を開始するタイミングP1であると判定した場合、エンジン制御ユニットに対して、エンジンブレーキによって減速度を発生させることを指示する。換言すると、減速度制御装置100は、エンジン制御ユニットに対して、エンジンブレーキ指示信号を出力する。エンジン制御ユニットは、エンジンブレーキ指示信号を取得すると、燃料、空気の供給を削減して、エンジン回転数を減少せしめ、この抵抗により制動力が生ずるエンジンブレーキ効果を発生させる。
【0038】
また、減速度制御装置100は、減速を開始するタイミングP1であると判定された場合、トランスミッションのギア位置を低速ギアにセット(シフトダウン)することで、エンジンブレーキによる減速度を発生させてもよい。
【0039】
ブレーキストロークセンサ33は、ブレーキペダルの踏み込み量(ブレーキ操作量)を検出し、この検出結果を示す出力信号を減速度制御ユニット10に出力する。換言すると、減速度制御ユニット10は、ブレーキペダルの踏み込み量を示す信号を取得する(ブレーキペダル踏み込み量取得手段)。つまり、減速度制御ユニット10は、ブレーキストロークセンサ33からの出力信号に基づいて、ブレーキペダルの踏み込み量(ブレーキペダルの操作状態)を監視している。
【0040】
車速センサ34は、自車両の速度(自車速度vs)を検出し、この検出結果を示す出力信号を減速度制御ユニット10に出力する。換言すると、減速度制御ユニット10は、自車両の速度を示す信号を取得する(自車速度取得手段)。つまり、減速度制御ユニット10は、アクセル開度センサ32からの出力信号に基づいて、アクセルペダルの操作状態を監視している。
【0041】
なお、減速度制御ユニット10は、相対距離xrの時間変化から先行車と自車両との相対速度vr、及び相対速度vrの時間変化から先行車と自車両との相対加速度arを求める(算出する)。換言すると、減速度制御ユニット10は、先行車と自車両との相対速度vrを取得する(相対速度取得手段)とともに、先行車と自車両との相対加速度arを取得する(相対課速度取得手段)。
【0042】
シフトセンサ35は、車両のシフト位置を検出し、この検出結果を示す出力信号を減速度制御ユニット10に出力する。換言すると、減速度制御ユニット10は、シフト位置を示す信号を取得する(シフト位置取得手段)。つまり、減速度制御ユニット10は、シフトセンサ35からの出力信号に基づいて、シフト位置を監視している。
【0043】
画像センサ36は、自車両の前方を撮像し、この撮像結果を示す出力信号を減速度制御ユニット10に出力する。換言すると、減速度制御ユニット10は、車両の前方の画像を示す信号を取得する(前方画像取得手段)。つまり、減速度制御ユニット10は、画像センサ36からの出力信号に基づいて、自車両の前方にある障害物、信号機、停止線、徐行交差点、踏切などを監視している。ただし、本実施形態における減速度制御装置100においては、この画像センサ36が設けられていなくても成り立つものである。
【0044】
地図情報取得部40は、例えば日本全土の道路地図データや、それに付随する、各種施設や店舗等の施設POI(Points Of Interest)データなど各種データを取得して、取得した各種データを減速度制御ユニット10に出力する。
【0045】
道路地図データは、地図上の交差点などをノードとして、道路が複数の部分に分割されており、このノードに関するノードデータ、各ノード間の部位分をリンクとして規定したリンクデータなどを含む。ノードデータは、地図上の各道路が交差、合流、分岐するノード毎に固有の番号を付したノードID、ノード座標、ノード名称等のデータを含んで構成される。また、リンクデータは、リンクID、リンク長、リンクの始点、終点の位置データ、角度(方向)データ、道路幅、道路種別等のデータを含んで構成される。ただし、本実施形態における減速度制御装置100においては、この地図情報取得部40が設けられていなくても成り立つものである。
【0046】
現在位置取得部50は、例えばGPS受信機、ジャイロセンサなどを備えて構成されるものであり、自車両の現在位置を取得して、この現在位置を示す出力信号を減速度制御ユニット10に出力する。ただし、本実施形態における減速度制御装置100においては、この現在位置取得部50が設けられていなくても成り立つものである。
【0047】
ここで、図2〜図4に基づいて、減速度制御装置100の処理動作に関して説明する。図2に示すフローチャートは、イグニッションスイッチがオンになるとスタートするとともに、イグニッションスイッチがオン時に所定時間毎にスタートする。つまり、減速度制御装置100は、イグニッションスイッチがオンになると図2のフローチャートに示す処理を実行するとともに、イグニッションスイッチがオン時に所定時間毎に図2のフローチャートに示す処理を実行する。
【0048】
ステップS10では、減速度制御ユニット10は、車間距離、相対速度、相対加速度を読み込む。つまり、減速度制御ユニット10は、相対距離xr、相対速度vr、相対加速度arを取得(算出)する。
【0049】
ステップS11では、減速度制御ユニット10は、減速開始タイミングP1であるか否かを判定する。そして、減速開始タイミングであると判定した場合はステップS12へ進み、減速開始タイミングでないと判定した場合はステップS10へ戻る。
【0050】
つまり、図3における減速開始タイミングP1であるか否かを判定する。すなわち、警報が必要であるか否かを判定する。この減速開始タイミングP1は、通常走行時と衝突の可能性があるときの間のタイミング(準通常走行時)である。一般的には、衝突の可能性があるときに(タイミングP2で)、警報(例えば、音や表示)を行う。しかしながら、本実施形態においては、衝突の可能性があるとまではいかないが、普段の運転よりは危険な状態(例:通常の車間距離よりも短くなっている状態、又は普段のブレーキ開始タイミングを過ぎてもブレーキを開始していない状態)で、予備的に警報を行うものである。換言すると、急ブレーキすることなく先行車と安全な車間距離を保つ、あるいは先行車や障害物などに対して安全に停止する、あるいは一時停止交差点やカーブ前など安全に走行するために、ある時点までに所定の速度まで減速する必要があるような場合に減速開始タイミングP1と判定する。ただし、本発明はこれに限定されるものではない。タイミングP2で初めて警報(エンジンブレーキによる減速度を用いた警報)を行うようにしてもよい。
【0051】
なお、この減速開始タイミングP1であるか否かを判定する際には、相対距離xr、相対速度vrなどから算出された指標が閾値に達したか否かによって行う。そして、指標が閾値に達していた場合は減速開始タイミングP1であると判定し、指標が閾値に達していた場合は減速開始タイミングP1でないと判定する。この閾値は、ドライバ毎に異なる値を設定することもできる。なお、後ほど説明するタイミングP2〜P5であるか否かを判定する際にも、指標が閾値に達したか否かによって行う。
【0052】
この指標としては、THW(Time Head Way)、TTC(Time To Collision)、TTC2ndなどを採用することができる。ここでは、一例としてTTC2ndを採用する。
【0053】
TTC2ndは、後ほど説明するTTCに対して、相対速度vrに加え相対加速度arも一定であると仮定した指標であり数式1で表される。
【数1】

【0054】
つまり、減速度制御装置100は、自車両と先行車との相対速度vrを検出する相対速度検出手段と、自車両と先行車との相対加速度arを検出する相対加速度検出手段と、自車両と先行車との相対距離xrを検出する相対距離検出手段とを備える。換言すると、減速度制御装置100は、自車両と先行車との相対速度vrを取得(算出)する相対速度取得(算出)手段と、自車両と先行車との相対加速度arを取得(算出)する相対加速度取得(算出)手段と、自車両と先行車との相対距離xrを取得(算出)する相対距離取得(算出)手段とを備える。そして、減速度制御装置100は、数式1で算出した値(指標)が所定値(閾値)に達しているか否かによって減速を開始するタイミングであるか否かを判定する(減速開始タイミング判定手段)。
【0055】
なお、この数式1は、メモリユニット20などの記憶装置に記憶されている。そして、減速度制御ユニット10は、相対距離xr、相対速度vr、相対加速度arを算出(取得)するとともに、メモリユニット20から数式1を読み出して指標を算出する。
【0056】
なお、THWは対象を静止物体と仮定し数式2で表される。
【数2】
【0057】
つまり、減速度制御ユニット10は、自車両の自車速度Vsを検出する自車速度検出手段と、自車両と先行車との相対距離xrを検出する相対距離検出手段とを備える。換言すると、減速度制御装置100は、自車両の速度を取得(算出)する自車速度取得(算出)手段と、自車両と先行車との相対距離xrを取得(算出)する相対距離取得(算出)手段とを備える。そして、減速度制御装置100は、数式2で算出した値(指標)が所定値(閾値)に達しているか否かによって減速を開始するタイミングであるか否かを判定する(減速開始タイミング判定手段)。
【0058】
なお、この数式2は、メモリユニット20などの記憶装置に記憶されている。そして、減速度制御ユニット10は、自車速度Vs、相対距離xrを取得(算出、検出)するとともに、メモリユニット20から数式2を読み出して指標を算出する。
【0059】
この場合、減速度制御装置100としては、自車速度vsと相対距離xrとを取得(算出、検出)できるものであれば採用することができる。つまり、減速度制御ユニット10は、相対速度vrや相対加速度arを取得(算出)できなくてもよい。
【0060】
また、TTCは現在の相対速度で等速直線運動を行った場合の衝突までの時間であり、数式3で表される。
【数3】
【0061】
つまり、減速度制御ユニット10は、自車両と先行車との相対速度vrを検出する相対速度検出手段と、自車両と先行車との相対距離xrを検出する相対距離検出手段とを備える。換言すると、減速度制御ユニット10は、自車両と先行車との相対速度vrを取得(算出)する相対速度取得(算出)手段と、自車両と先行車との相対距離xrを取得(算出)する相対距離取得(算出)手段とを備える。そして、減速度制御装置100は、数式3で算出した値(指標)が所定値(閾値)に達しているか否かによって減速を開始するタイミングであるか否かを判定する(減速開始タイミング判定手段)。
【0062】
なお、この数式3は、メモリユニット20などの記憶装置に記憶されている。そして、減速度制御ユニット10は、相対速度vr、相対距離xrを取得(算出、検出)するとともに、メモリユニット20から数式3を読み出して指標を算出する。
【0063】
この場合、減速度制御装置100としては、相対速度vrと相対距離xrとを取得(算出)できるものであれば採用することができる。つまり、減速度制御ユニット10は、自車速度vsや相対加速度arを取得(算出)できなくてもよい。
【0064】
また、減速度を一定と仮定した場合の算出式(数式4、数式5)、減速時間を一定と仮定した場合の算出式(数式6)を採用することもできる。つまり、相対距離xrが数式4、数式5、数式6で算出されるドライバが減速操作を開始する車間距離HBに達したか否かによって、減速開始タイミングであるか否かを判定するようにしてもよい。
【0065】
なお、以下に示す数式4、数式5、数式6における限界車間時間Hlim及び減速度Gfは、個人パラメータ(個人によってその値が異なる)である。よって、ドライバの運転特性の統計をとり、統計的に決定した限界車間時間Hlim及び減速度Gfを用いることにより、個人適応が可能となる。つまり、ドライバの運転特性に応じて、減速開始タイミングであるか否かを適切に判定することができる。換言すると、ドライバ毎に減速開始タイミングであるか否かを適切に判定することができる。
【数4】
【0066】
この場合、減速度制御装置100としては、自車速度vsと相対速度vrとを取得(算出、検出)できるものであり、個人パラメータ(個人によってその値が異なる)である限界車間時間Hlim及び減速度Gfを設定可能なものであれば採用することができる。
【数5】
【0067】
この場合、減速度制御装置100としては、相対距離xrと自車速度vsと相対速度vrとを取得(算出、検出)できるものであり、個人パラメータ(個人によってその値が異なる)である限界車間時間Hlim及び減速度Gfを設定可能なものであれば採用することができる。
【数6】
【0068】
この場合、減速度制御ユニット10としては、相対距離xrと自車速度vsと相対速度vrと相対加速度arを取得(算出、検出)できるものであり、現在からの予想時間τ、及び個人パラメータ(個人によってその値が異なる)である限界車間時間Hlim及び減速度Gfを設定可能なものであれば採用することができる。
【0069】
なお、これらの数式4乃至6は、メモリユニット20などの記憶装置に記憶されている。そして、減速度制御ユニット10は、相対距離xrや自車速度vsなどを取得(算出、検出)するとともに、メモリユニット20から数式4乃至6のいずれかを読み出して指標を算出する。
【0070】
また、減速開始タイミングであるか否かを判定する際には、これらの数式1乃至数式6を用いなくてもよい。例えば、ドライバの運転特性の統計を取ることで(学習することで)、統計的に「通常の車間距離」や「通常の減速タイミング」のデータを収集する。この統計的データに基づいて、減速開始タイミングであるか否かを判定するようにしてもよい。
【0071】
なお、これらを適宜組み合わせて、減速開始タイミングであるか否かを判定するようにしてもよい。
【0072】
また、本実施形態における減速度制御装置100は、図3,図4に示すように、自車両と先行車との状況(すなわち、先行車との衝突の可能性、数式1などによる指標)に応じた減速度(α1、α2、α3、α4、α5、A)を車両に印加するものである。つまり、減速度制御装置100は、算出された指標に基づいて、各減速度(α1、α2、α3、α4、α5、A)を印加するタイミング(P1〜P5)を判定している。よって、各タイミングに対応して閾値(例えば、タイミングP1に対する閾値1、タイミングP2に対する閾値2、タイミングP3に対する閾値3、タイミングP4に対する閾値4、タイミングP5に対する閾値5)が設定されている。
【0073】
次に、ステップS12では、減速度制御ユニット10は、ドライバに減速度印加(自車両に対する減速度の印加)不要の意思があるか否かを判定する。そして、不要意思があると判定した場合はステップS21へ進み、不要意思がないと判定した場合はステップS13へ進む。
【0074】
このとき、減速度制御ユニット10は、例えばドライバによって操作されると不要意思を示す信号を出力するスイッチ等から、この不要意思を示す信号を取得したか否かによって判断する。
【0075】
又は、減速度制御ユニット10は、アクセル開度センサ32から取得したアクセル開度(アクセル操作量)が所定値に達しているか否か、あるいはアクセル操作量の単位時間当たりの変化量(時間微分値)が所定値に達しているか否か、あるいはそれら両方によって判断してもよい。つまり、減速度制御ユニット10は、アクセル開度センサ32から取得したアクセル開度(アクセル操作量)に基づいて、不要意思の有無を判断することができる。よって、減速度制御ユニット10は、アクセル開度、あるいはアクセル操作量の単位時間当たりの変化量(時間微分値)、あるいはそれら両方が所定値に達していた場合は不要意思があると判定し、達していない場合は不要意思がないと判定する。
【0076】
又は、減速度制御ユニット10は、ブレーキストロークセンサ33から取得したブレーキペダルの踏み込み量(ブレーキ操作量)が所定値に達しているか否か、あるいはブレーキ操作量の単位時間当たりの変化量(時間微分値)が所定値に達しているか否か、あるいはそれら両方によって判断してもよい。つまり、減速度制御ユニット10は、ブレーキストロークセンサ33から取得したブレーキペダルの踏み込み量(ブレーキ操作量)に基づいて、不要意思の有無を判断することができる。よって、減速度制御ユニット10は、ブレーキ操作量、あるいはブレーキ操作量の単位時間当たりの変化量(時間微分値)が所定値に達しているか否か、あるいはそれら両方が所定値に達していた場合は不要意思があると判定し、達していない場合は不要意思がないと判定する。
【0077】
又は、減速度制御ユニット10は、車速センサ34から取得した自車速度vsが所定値に達しているか否かによって判断してもよい。例えば、減速度制御ユニット10は、自車速度vsおよび自車速度vsの時間変化量(自車加速度as)、あるいはそれら両方が所定値に達していた場合は不要意思があると判定し、自車速度vsが所定値に達していない場合は不要意思がないと判定する。
【0078】
さらに、これらを適宜組み合わせて判断してもよい。
【0079】
ステップS13では、減速度制御ユニット10は、減速度による警報を行う。つまり、ドラムブレーキ(主ブレーキ)を用いた減速度を発生させて減速を開始するタイミングP1であることを示す警報(すなわち、「減速開始タイミングを知らせる警報」、「減速すべき状況であることを知らせる警報」)を行う。このとき、減速度制御ユニット10は、図3のタイミングP1において、エンジンブレーキ(補助ブレーキ)によって減速度α1(ドライバが感じることができる程度の減速度)を発生させることで、減速開始タイミングを知らせる警報を行う(警報手段)。すなわち、エンジンブレーキによって減速度を発生させて、車両のドライバに対して減速度を感じさせることによって警報を行うものである。また、ここでは、エンジンブレーキ(補助ブレーキ)による減速度α1で警報を行うとともに、音(ブザーや音声など)や表示(インジケータや文字表示)で警報を行うようにしてもよい。
【0080】
なお、このエンジンブレーキによって減速度α1を発生させるのは、あくまでも減速開始タイミングを知らせる警告のためである。よって、減速度α1は、車両のドライバに対して減速度を感じさせることができる程度の大きさである。
【0081】
ステップS14では、減速度制御ユニット10は、衝突危険性の指標を算出する。この衝突危険性の指標は、上述の数式1を用いて算出する。
【0082】
ステップS15では、減速度制御ユニット10は、ステップS14で算出した指標が閾値(閾値5)以上であるか否かを判定する。つまり、図3におけるタイミングP5であるか否かを判定する。すなわち、プリクラッシュブレーキ(介入制動、減速度A)が必要であるか否かを判定する。そして、指標が閾値5以上であった場合はステップS16へ進み、指標が閾値5以上でなかった場合はステップS18へ進む。また、図3におけるタイミングP5においては、プリクラッシュブレーキの他に、プリクラッシュシートベルト(急制動時に乗員の姿勢を抑えるために、シートベルトを巻き上げること)を行うようにしてもよい。
【0083】
ステップS16では、減速度制御ユニット10は、緊急ブレーキをかける。このとき、減速度制御ユニット10は、ドラムブレーキによる制動制御を行い、車両に対して減速度Aを印加する。つまり、プリクラッシュブレーキ(介入制動、減速度A)を行う。つまり、このような場合は、衝突被害最小化するために、短時間(急速)に強い制動力を印加する。
【0084】
ステップS17では、減速度制御ユニット10は、安全になったか否かを判定する。このとき、減速度制御ユニット10は、数式1で算出して指標が閾値1に達しているか否かを判定する。そして、指標が閾値1に達していない場合は安全になったとみなしてステップS21へ進み、指標が閾値1に達していた場合は安全になったとみなすことなくステップS13へ戻る。
【0085】
ステップS18では、減速度制御ユニット10は、減速度段階変化タイミングであるか否かを判定する。このとき、減速度制御ユニット10は、ステップS14で算出した指標が前回の値から変化しているか否かによって、減速度段階変化タイミングであるか否かを判定する。そして、ステップS14で算出した指標が前回の値から変化している場合は減速度段階変化タイミングであるとみなしてステップS19へ進み、変化していない場合は減速度段階変化タイミングでないとみなしてステップS20へ進む。
【0086】
ステップS19では、減速度制御ユニット10は、減速度段階を変化させる。例えば、前回の減速度がα1であり、今回の指標が閾値2に達していた(閾値3未満)場合、減速度制御ユニット10は、減速度をα1からα2に大きくする。同様に、前回の減速度がα2であり、今回の指標が閾値3に達していた(閾値4未満)場合、減速度制御ユニット10は、減速度をα2からα3に大きくする。また、前回の減速度がα2であり、今回の指標が閾値1に達していた(閾値2未満)場合、減速度制御ユニット10は、減速度をα2からα1に小さくする。
【0087】
ステップS20では、減速度制御ユニット10は、衝突危険性(指標)に応じた減速度を車両に対して印加する。つまり、前回と同じ減速度を発生させる。
【0088】
なお、図3,4に示すように、減速度制御ユニット10は、指標が閾値2に達しており、閾値3に達していなかった場合(つまり、タイミングP2で)は、減速度α2を車両に対して印加する。このとき、減速度制御ユニット10は、エンジンブレーキ(補助ブレーキ)によって減速度α2を発生させることで、減速開始タイミングを知らせる警報を再度行う(警報手段)。
【0089】
また、図3,4に示すように、減速度制御ユニット10は、指標が閾値3に達しており、閾値4に達していなかった場合(つまり、タイミングP3で)は、衝突の可能性があるとみなして、減速度α3を車両に対して印加する。このとき、減速度制御ユニット10は、エンジンブレーキ(補助ブレーキ)によって減速度α3を発生させることで、減速開始タイミングを知らせる警報を再度行う(警報手段)。なお、ここで初めて、エンジンブレーキ(補助ブレーキ)による警報を行うとともに、音(ブザーや音声など)や表示(インジケータや文字表示)で警報を行うようにしてもよい。
【0090】
このように、エンジンブレーキによる減速度を複数回発生させて警報を行うようにしてもよい。つまり、車両のドライバに対して、減速度を複数回与えることによって、減速開始タイミングを知らせる警報を行うようにしてもよい。つまり、一回目の警報(減速度α1)を行ったにもかかわらずドライバがブレーキを踏まない、又は加速度をつけるなど減速する意思が見られなく、指標が次段の閾値(例えば閾値2)に達した場合などは、エンジンブレーキによる減速度を複数回発生させて警報を行い、ドライバに減速するべき状況であることを示唆してもよい。
【0091】
例えば、エンジンブレーキが発生可能な減速度(換言すると、減速度を発生させるための制動力)が比較的小さい場合もありうる。しかしながら、このようにすることによって、ドライバに対して減速度を感じさせやすくすることができる。従って、エンジンブレーキが発生可能な減速度が比較的小さい場合であっても、減速すべき状況であることを知らせることができる。
【0092】
また、このように、エンジンブレーキによる減速度を複数回発生させる際には、減速度の大きさ(換言すると、減速度を発生させるための制動力の大きさ)を段階的に大きくするようにしてもよい。つまり、衝突の可能性が高まるに連れて、減速度の大きさを段階的に大きくするようにしてもよい。ここでは、減速度α1、α2、α3の順に段階的に大きくする。
【0093】
このようにすることによって、同じ大きさの減速度を複数回発生させる場合よりも、ドライバに対して減速度を感じさせやすくすることができる。従って、減速すべき状況であることを確実に知らせることができる。ただし、本発明はこれに限定されるものではない。例えば、衝突の可能性が高まっても、同じ減速度(例えばα1)を複数回発生させて警報を行うようにしてもよい。
【0094】
また、ここでは、指標が変化することで、エンジンブレーキによる減速度を複数回発生させて警報を行う例を採用したが、本発明はこれに限定されるものではない。指標が閾値1に達しており、閾値2に達していなかった場合に(つまり、タイミングP1からP2の間で)、エンジンブレーキによる減速度を複数回発生させて警報を行うようにしてもよい。このようにしても、同様の効果を奏することができる。なお、タイミングP2からP3の間でも同様に減速度を複数回発生させて警報を行うようにしてもよい。
【0095】
また、このように、タイミングP1からP2の間でエンジンブレーキによる減速度を複数回発生させる際には、エンジンブレーキによる減速度を不連続なタイミングで発生させるようにしてもよい。このようにすることによって、等間隔(時間的に等間隔)でエンジンブレーキによる減速度を発生させる場合よりも、ドライバに対して減速度を感じさせやすくすることができる。従って、減速すべき状況であることを確実に知らせることができる。なお、タイミングP2からP3の間でも同様に減速度を複数回発生させて警報を行うようにしてもよい。
【0096】
なお、タイミングP1からP2の間でエンジンブレーキによる減速度を複数回発生させる場合であっても、減速度を徐々に大きくしていってもよい。このようにすることによって、同じ大きさの減速度を複数回発生させる場合よりも、ドライバに対して減速度を感じさせやすくすることができる。従って、減速すべき状況であることを確実に知らせることができる。なお、タイミングP2からP3の間でも同様に減速度を複数回発生させて警報を行うようにしてもよい。
【0097】
また、タイミングP1からP2の間でエンジンブレーキによる減速度を大きくしていって複数回減速度を発生させる場合、各減速度の増加率を変化させてもよい(例えば危険度に応じて各減速度の増加率を変化させてもよい)。このようにすることによって、より一層、ドライバに対して減速度を感じさせやすくすることができる。従って、減速すべき状況であることを確実に知らせることができる。なお、タイミングP2からP3の間でも同様に減速度を複数回発生させて警報を行うようにしてもよい。
【0098】
ただし、本発明はこれに限定されるものではない。例えば、タイミングP1からP2の間やタイミングP2からP3の間で、同じ減速度(例えばα1)を複数回発生させて警報を行うようにしてもよい。
【0099】
なお、本発明は、このようにエンジンブレーキによる減速度を複数回発生させて警報を行うものに限定されるものではない。エンジンブレーキによる減速度を一回発生させることで、減速を開始するタイミングP1であることを示す警報を行うようにしてもよい。この場合、短時間(急速)にエンジンブレーキによる減速度(ドライバが感じることができる程度の減速度)を発生させるようにすると好ましい。
【0100】
また、図3,4に示すように、減速度制御ユニット10は、指標が閾値4に達しており、閾値5に達していなかった場合(つまり、タイミングP4で)は、ドライバがブレーキペダルを踏むと、減速度α4(補助制動力)を車両に対して印加する。このとき、減速度制御ユニット10は、ドラムブレーキ(主ブレーキ)によって減速度α4を発生させることで、ドライバのブレーキ操作による制動力よりも制動力を高める。つまり、ドライバの操作による減速を補助する。なお、タイミングP4では、ドラムブレーキで減速度を発生させることで警報を行った後に、減速度α4(補助制動力)を車両に対して印加するようにしてもよい。
【0101】
ステップS21では、減速度の印加量をゼロにする。減速度制御ユニット10は、まだ減速度を印加していない場合は減速度の印加を行わないようにする。つまり、減速度制御ユニット10は、自動制動(ドライバのブレーキペダル操作に基づかない制動)を行わないようにする。例えば、ステップS12の判定においてNO判定がなされた場合(ドライバに減速度印加不要の意思がある場合)には、減速度の印加を取りやめても良い。又は、既に減速度を印加している場合はその減速度をゼロにする。つまり、減速度制御ユニット10は、自動制動(ドライバのブレーキペダル操作に基づかない制動)を中止する。例えば、ステップS13,S16,S19,S120において既に減速度を印加している場合は、その減速度をゼロにする。
【0102】
このように、エンジンブレーキを用いて警報を行うことによって、ドラムブレーキ(又はディスクブレーキ)の使用頻度を減らすことができる。従って、ドラムブレーキ(又はディスクブレーキ)におけるフェード現象やヴェイパーロック現象を抑制しつつ、減速すべき状況であることを知らせることができる。
【0103】
なお、ドライバに対する警報としては、一般的にアラーム音やインジケータを採用することも考えられる。しかしながら、車室内で発生されるアラーム音やインジケータによる警報は、減速に関するものだけではない。よって、アラーム音やインジケータによって減速開始タイミングを知らせる警報を行った場合、ドライバが他のコンテンツ(システム)のアラーム音やインジケータと混同してしまうことがありうる。つまり、ドライバに対して「減速を開始するタイミングである(減速すべき状況である)」という警報内容を直観的に理解させることができない可能性がある。
【0104】
また、音声や文字表示を用いて減速開始タイミングを知らせる警報を行うことも考えられる。しかしながら、このように音声や文字表示を用いた警報の場合、ドライバは、内容を聞き取り理解する時間や文字を読み理解する時間が必要となる。例えば、音声や文字表示で「減速を開始するタイミングです!」などの警報を行うと、この長さから内容を聞き取り理解する時間や文字を読み理解する時間が必要となる。よって、ドライバの運転に対する注意力が散漫したり、警報に対する即応性が失われたりする可能性がある。
【0105】
これに対して、減速度を利用して減速開始タイミングを知らせる警報を行った場合、主ブレーキを用いて減速度を発生させた場合と同様に、ドライバに対して減速度を感じさせることになる。従って、アラーム音やインジケータ、又は音声や文字表示を採用する場合よりも、「減速を開始するタイミングである」という警報内容を、ドライバに対して直観的に理解させやすくすることができる。よって、「減速を開始するタイミングである」という警報内容に対する即応性が失われことを抑制できる。これによって、イージードライブを実現することができる。
【0106】
また、ドライバが減速すべき状況であることを知覚している場合、或いは誤作動で警報が発生する場合もある。このような場合、音や表示によって警報を行うと、ドライバは煩わしく感じることがある。これに対して、本実施形態においては、エンジンブレーキによる減速度で警報を行うので、つまり、比較的自然な減速度(制動力)の印加であるため、このような場合であっても、音や表示によって警報を行うよりも、ドライバが煩わしく感じることを抑制できる。
【0107】
さらに、エンジンブレーキによる減速度で警報を行うので、アクセルを踏み込むことですぐに速度回復ができる。よって、ドラムブレーキによって警報を行う場合よりも、再加速による燃料の無駄が発生することを抑制できる。
【0108】
以上、本発明の好ましい実施形態について説明したが、本発明は上述した実施形態に何ら制限されることはなく、本発明の趣旨を逸脱しない範囲において、種々の変形が可能である。つまり、本発明における車両減速度制御装置は、ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度と、このブレーキ以外の補助ブレーキを用いた減速度とを発生させることができる車両に搭載されるものであって、ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度を発生させて減速を開始するタイミングであるか否かを判定する減速開始タイミング判定手段と、減速開始タイミング判定手段によって減速を開始するタイミングであると判定された場合に、補助ブレーキによって減速度を発生させることで減速を開始するタイミングであることを示す警報を行う警報手段と、を備えるものであれば、本発明の目的は達成できる。
【0109】
なお、本実施形態においては、補助ブレーキとしてエンジンブレーキを採用した。しかしながら、本発明はこれに限定されるものではない。
【0110】
例えば、原動機として電動モータを用いる車両は、ディスクブレーキやドラムブレーキの他に、回生ブレーキによって減速度を発生させることができる。そこで、原動機として電動モータを用いる車両に減速度制御装置100が搭載される場合、補助ブレーキとしては、回生ブレーキを採用するようにしてもよい。この回生ブレーキは、回転力を発電機を回すことに利用することで減速力を発生するものである。つまり、通常は駆動力として用いている電動機(電動モータ)を発電機として作動させ、運動エネルギーを電気エネルギーに変換して回収することで減速力を発生するものである。なお回生ブレーキは、周知技術であるため詳しい説明は省略する。
【0111】
また、原動機として電動モータを用いる車両は、ディスクブレーキやドラムブレーキの他に、発電ブレーキによって減速度を発生させることができる。そこで、原動機として電動モータを用いる車両に車両減速度制御装置100が搭載される場合、補助ブレーキとしては、発電ブレーキを採用するようにしてもよい。この発電ブレーキは、抵抗器に電気を通し、熱エネルギーとして捨てたり、発電機を逆回転に回転させる方向の回転抵抗を生じさせることで減速力を発生させるものである。つまり、電動機(電動モータ)内で通常駆動とは逆の回転抵抗を生じさせることで減速力を発生させるものである。なお発電ブレーキは、周知技術であるため詳しい説明は省略する。
【0112】
また、原動機としてディーゼルエンジンを用いる車両は、ディスクブレーキやドラムブレーキの他に、排気ブレーキによって減速度を発生させることができる。そこで、原動機としてディーゼルエンジンを用いる車両に車両減速度制御装置100が搭載される場合、補助ブレーキとしては、排気ブレーキを採用するようにしてもよい。この排気ブレーキは、排気管の途中に設けられたバルブを閉じることで、排気圧力を高め減速度を発生させるものである。なお排気ブレーキは、周知技術であるため詳しい説明は省略する。
【0113】
このように、補助ブレーキとして、回生ブレーキ、発電ブレーキ、排気ブレーキなどを用いた場合であっても、本発明の目的は達成できる。また、ディスクブレーキやドラムブレーキとともに車両に設けられた、ディスクブレーキやドラムブレーキとは異なる減速度を発生させる手段(機能)を補助ブレーキとして用いることによって、特別に補助ブレーキを設ける必要がないので好ましい。
【0114】
また、本実施形態においては、指標を算出する際の相対距離xrなどの対象として、先行車を採用したが本発明はこれに限定されるものではない。車両減速度制御装置100が搭載された車両が減速すべき状況であれば同様に実施することができる。
【0115】
例えば、自車両の前方にある障害物(歩行者、落下物、壁面、立体物)、法規で減速あるいは停止が定められている地点(信号機、停止線、徐行交差点、踏切)、カーブへの進入地点などを対象として採用することもできる。このような対象を採用する場合、上述の画像センサ36、地図情報取得部40、現在位置取得部50を用いることによって、指標を算出することができる。つまり、減速度制御ユニット10は、画像センサ36、地図情報取得部40、現在位置取得部50からの出力された出力信号や各種データに基づいて、対象を決定することができるとともに、指標を算出する際の各種情報(相対距離xrなど)を算出することができる。
【0116】
例えば、自車両の前方の信号機が、停止位置を越えて進んではいけないことを示す状態(赤信号)であった場合を一例として説明する。この場合、減速度制御ユニット10は、画像センサ36からの出力信号に基づいて、自車両の前方の信号機が赤信号であることを認識する。換言すると、減速度制御ユニット10は、自車両の前方の信号機が赤信号であること示す信号を取得(検出、算出)する。さらに、減速度制御ユニット10は、自車両から信号機(又は、信号機に対応して設けられた停止線)までの距離(自車両と信号機との相対距離xr)を取得(検出、算出)する。また、減速度制御ユニット10は、自車両の自車速度Vsを取得(検出、算出)する。そして、減速度制御ユニット10は、この相対距離xrと自車速度Vsと、上述の数式2を用いて、指標を算出する。
【0117】
このように、障害物(歩行者、落下物、壁面、立体物)、法規で減速あるいは停止が定められている地点(信号機、停止線、徐行交差点、踏切)、カーブへの進入地点などを対象として採用した場合であっても、本発明の目的は達成できる。
【0118】
つまり、減速度制御装置100(減速開始タイミング判定手段)は、ある地点で停止又は所定の速度になっているために、主ブレーキを用いた減速度を発生させて減速を開始するタイミングを判定するものである。よって、ある地点(言い換えると、減速対象地点)は、先行車の位置、自車両の前方にある障害物(歩行者、落下物、壁面、立体物)の位置、法規で減速あるいは停止が定められている地点(信号機、停止線、徐行交差点、踏切)、カーブへの進入地点を採用することができる。
【符号の説明】
【0119】
10 減速度制御ユニット、20 メモリユニット、30 センサ部、31 車間距離センサ、32 アクセル開度センサ、33 ブレーキストロークセンサ、34 車速センサ、35 シフトセンサ、36 画像センサ、40 地図情報取得部、50 現在位置取得部、60 リニア弁、61 FRリニア弁、62 FLリニア弁、63 RRリニア弁、64 RLリニア弁、71〜74 減圧弁、81,82 ソレノイド弁、100 車両減速度制御装置
【技術分野】
【0001】
本発明は、車両の減速度を制御する車両減速度制御装置に関するものである。
【背景技術】
【0002】
従来、車両の減速度を制御する車両減速度制御装置の一例として、特許文献1に記載された車両走行制御装置がある。
【0003】
この車両走行制御装置は、衝突の可能性があると判定された場合に警報を発生させる。さらに、警報を発生させた後、自動ブレーキを作動させるか否かの判定処理を行い、自動ブレーキを作動させると判定された場合は自動ブレーキを作動させるものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3319229号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、警報を行なう際には、油圧や空気圧で動作するディスクブレーキやドラムブレーキを用いて車両に対して減速力を印加することで「減速すべき状況である」ことを示す警報を行うことが考えられる。しかしながら、ディスクブレーキやドラムブレーキは、使いすぎるとブレーキが利かなくなる現象(フェード現象やヴェイパーロック現象)が発生するという問題がある。
【0006】
本発明は、上記問題点に鑑みなされたものであり、フェード現象やヴェイパーロック現象を抑制しつつ、ドライバに対して減速すべき状況であることを知らせることができる車両減速度制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために請求項1に記載の車両減速度制御装置は、ディスクブレーキ及びドラムブレーキの少なくとも一方(以下、主ブレーキとも称する)を用いた減速度と、主ブレーキ以外の補助ブレーキを用いた減速度とを発生させることができる車両に搭載されるものである。この車両減速度制御装置は、主ブレーキを用いた減速度を発生させて減速を開始するタイミングであるか否かを判定する(減速開始タイミング判定手段)。そして、車両減速度制御装置は、主ブレーキを用いた減速度を発生させて減速を開始するタイミングであることを示す警報(すなわち、「減速開始タイミングを知らせる警報」、「減速開始すべき状況であることを知らせる警報」)を行うものである。
【0008】
さらに、車両減速度制御装置は、減速を開始するタイミングであると判定された場合に、補助ブレーキによって減速度を発生させることで、減速開始タイミングを知らせる警報を行う(警報手段)ことを特徴とするものである。つまり、補助ブレーキによって減速度を発生させて、車両のドライバに対して減速度を感じさせることによって警告を行うものである。
【0009】
このように、補助ブレーキを用いて警報を行うことによって、ディスクブレーキやドラムブレーキの使用頻度を減らすことができる。従って、ディスクブレーキやドラムブレーキにおけるフェード現象やヴェイパーロック現象を抑制しつつ、減速すべき状況であることを知らせることができる。
【0010】
また、補助ブレーキを用いて警報を行う際には、請求項2に示すように、補助ブレーキによる減速度を複数回発生させるようにしてもよい。つまり、車両のドライバに対して、減速度を複数回与えることによって、減速開始タイミングを知らせる警報を行う。
【0011】
例えば、補助ブレーキが発生可能な減速度(換言すると、減速度を発生させるための制動力)が比較的小さい場合もありうる。しかしながら、請求項2に示すようにすることによって、ドライバに対して減速度を感じさせやすくすることができる。従って、補助ブレーキが発生可能な減速度が比較的小さい場合であっても、減速すべき状況であることを知らせることができる。
【0012】
また、補助ブレーキによる減速度を複数回発生させる際には、請求項3に示すように、減速度の大きさ(換言すると、減速度を発生させるための制動力の大きさ)を段階的に大きくするようにしてもよい。
【0013】
このようにすることによって、同じ大きさの減速度を複数回発生させる場合よりも、ドライバに対して減速度を感じさせやすくすることができる。従って、減速すべき状況であることを知らせやすくすることができる。
【0014】
また、補助ブレーキによる減速度を複数回発生させる際には、請求項4に示すように、補助ブレーキによる減速度を不連続なタイミングで発生させるようにしてもよい。
【0015】
このようにすることによって、等間隔(時間的に等間隔)で補助ブレーキによる減速度を発生させる場合よりも、ドライバに対して減速度を感じさせやすくすることができる。従って、減速すべき状況であることを知らせやすくすることができる。
【0016】
なお、請求項5に示すように、補助ブレーキによる減速度を一回発生させることで、減速を開始するタイミングであることを示す警報を行うようにしてもよい。
【0017】
また、原動機としてガソリンエンジンを用いる車両は、ディスクブレーキ及びドラムブレーキの他に、エンジンブレーキによって減速度を発生させることができる。そこで、請求項6に示すように、原動機としてガソリンエンジンを用いる車両に車両減速度制御装置が搭載される場合、補助ブレーキとしては、エンジンブレーキを採用するようにしてもよい。
【0018】
また、原動機として電動モータを用いる車両は、ディスクブレーキ及びドラムブレーキの他に、回生ブレーキによって減速度を発生させることができる。そこで、請求項7に示すように、原動機として電動モータを用いる車両に車両減速度制御装置が搭載される場合、補助ブレーキとしては、回生ブレーキを採用するようにしてもよい。
【0019】
また、原動機として電動モータを用いる車両は、ディスクブレーキ及びドラムブレーキの他に、発電ブレーキによって減速度を発生させることができる。そこで、請求項8に示すように、原動機として電動モータを用いる車両に車両減速度制御装置が搭載される場合、補助ブレーキとしては、発電ブレーキを採用するようにしてもよい。
【0020】
また、原動機としてディーゼルエンジンを用いる車両は、ディスクブレーキ及びドラムブレーキの他に、排気ブレーキによって減速度を発生させることができる。そこで、請求項9に示すように、原動機としてディーゼルエンジンを用いる車両に車両減速度制御装置が搭載される場合、補助ブレーキとしては、排気ブレーキを採用するようにしてもよい。
【0021】
請求項6乃至9に示すように、ディスクブレーキやドラムブレーキとともに車両に設けられた、ディスクブレーキやドラムブレーキとは異なる減速度を発生させる手段(機能)を補助ブレーキとして用いることによって、特別に補助ブレーキを設ける必要がないので好ましい。
【図面の簡単な説明】
【0022】
【図1】本発明の実施の形態における車両減速度制御装置の概略構成を示すブロック図である。
【図2】本発明の実施の形態における車両減速度制御装置の処理動作を示すフローチャートである。
【図3】本発明の実施の形態における車両減速度制御装置における車両の状況と減速度との関係を示す説明図である。
【図4】本発明の実施の形態における車両減速度制御装置における各減速度と各タイミングの関係を示すグラフである。
【発明を実施するための形態】
【0023】
以下、本発明の実施の形態を図に基づいて説明する。なお、本実施形態においては、本発明の車両減速度制御装置100(以下、減速度制御装置100とも称する)を原動機としてガソリンエンジンを用いる車両に搭載した例を採用する。詳細には、減速度制御装置100は、主ブレーキ(ここではドラムブレーキ)を用いた減速度(制動力、制動効果)と、主ブレーキ以外の補助ブレーキ(ここではエンジンブレーキ)を用いた減速度(制動力、制動効果)とを発生させることができる車両に搭載されるものである。換言すると、減速度制御装置100は、主ブレーキ(ここではドラムブレーキ)を用いた減速度を自車両に対して印加可能であるとともに、主ブレーキ以外の補助ブレーキ(ここではエンジンブレーキ)を用いた減速度を自車両に対して印加可能である車両に搭載されるものである。
【0024】
なお、主ブレーキとしては、ドラムブレーキの他にディスクブレーキを採用することもできる。つまり、減速度制御装置100は、ディスクブレーキを用いた減速度と、主ブレーキ以外の補助ブレーキを用いた減速度とを発生させることができる車両に搭載されるものであってもよい。
【0025】
また、主ブレーキとして、ドラムブレーキとディスクブレーキの両方を採用することもできる。つまり、減速度制御装置100は、例えば前輪に設けられたディスクブレーキ及び後輪に設けられたドラムブレーキを用いた減速度と、主ブレーキ以外の補助ブレーキを用いた減速度とを発生させることができる車両に搭載されるものであってもよい。
【0026】
また、減速度制御装置100は、ドラムブレーキを用いた減速度を発生させて減速を開始するタイミングP1であるか否かを判定する(減速開始タイミング判定手段)とともに、ドラムブレーキを用いた減速度を発生させて減速を開始するタイミングP1であることを示す警報(すなわち、「減速開始タイミングを知らせる警報」、「減速すべき状況であることを知らせる警報」)を行うものである。
【0027】
さらに、減速度制御装置100は、減速を開始するタイミングP1であると判定された場合に、エンジンブレーキによって減速度α1を発生させることで、減速開始タイミングを知らせる警報を行う(警報手段)。つまり、エンジンブレーキによって減速度α1を発生させて、車両のドライバに対して減速度α1を感じさせることによって警告を行うものである。
【0028】
なお、本実施形態における減速度制御装置100は、後ほど詳しく説明するが、自車両と先行車との状況(すなわち、先行車との衝突の可能性、数式1乃至数式6による指標)に応じて減速度(α1、α2、α3、α4、α5、A)を車両に印加する(図3,4参照)。減速度の大きさは、α1≦α2≦α3≦α4≦α5≦Aを満たすものである。また、減速度Aは、ドライバのブレーキ操作に応じて減速度制御装置100が発生させた減速度に、ドライバのブレーキ操作に関係なく減速度制御装置100が発生させる減速度α5を加えた値であり、本減速度制御装置が搭載された車両が自動で発生できる最大減速度である。
【0029】
本発明に係る減速度制御装置100は、図1に示すように、制御部をなす減速度制御ユニット10、及び減速度制御ユニット10に接続されたメモリユニット20、センサ部30、地図情報取得部40、現在位置取得部50、リニア弁部60、減圧弁71〜74、ソレノイド弁81,82などを備えて構成されている。
【0030】
減速度制御ユニット10は、周知のコンピュータとして構成されており、内部にはCPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、I/O(Input/Output)及びこれらの構成を接続するバスラインなどが備えられている。
【0031】
メモリユニット20には、減速度制御(制動制御)の際に用いる数式(後ほど説明する数式1〜数式6)などが格納されている。なお、減速度制御ユニット10は、この数式などに基づいて、各車輪に設けられた各ホイルシリンダ(ドラムブレーキ内)に接続された各リニア弁61〜64と各減圧弁71〜74、並びにソレノイド弁81,82をそれぞれ制御することで、ドラムブレーキによる制動制御を行う。さらに、減速度制御ユニット10は、この数式などに基づいて、エンジンブレーキによる制動制御を行う。
【0032】
なお、減速度制御装置100が搭載されている車両は、右側前輪、左側前輪、右側後輪、左側後輪の夫々に、ドラムブレーキ(主ブレーキであり、ホイルシリンダ、ブレーキシューなどを含む)が設けられており、これによって車両の制動を行う構成となっている。なお、ドラムブレーキ、各リニア弁61〜64、各減圧弁71〜74、ソレノイド弁81,82などを含む主ブレーキの構成及び動作は、周知技術であるため詳しい説明は省略する。
【0033】
センサ部30は、車間距離センサ31、アクセル開度センサ32、ブレーキストロークセンサ33、車速センサ34、シフトセンサ35、画像センサ36が含まれる。そして、減速度制御ユニット10には、これらの各センサ31〜36の各出力信号が供給される。
【0034】
車間距離センサ31は、先行車との距離(車間距離、相対距離xr)を検出し、この検出結果を示す出力信号を減速度制御ユニット10に出力する。車間距離センサ31は、例えばレーザーレーダ、ミリ波センサや画像センサなどを採用することができる。換言すると、減速度制御ユニット10は、先行車との車間距離を示す信号を取得する(車間距離取得手段)。つまり、減速度制御ユニット10は、車間距離センサ31からの出力信号に基づいて、先行車との車間距離を監視している。
【0035】
アクセル開度センサ32は、アクセル開度(アクセル操作量)を検出し、この検出結果を示す出力信号を減速度制御ユニット10に出力する。換言すると、減速度制御ユニット10は、アクセル開度を示す信号を取得する(アクセル開度取得手段)。つまり、減速度制御ユニット10は、アクセル開度センサ32からの出力信号に基づいて、アクセルペダルの操作状態を監視している。
【0036】
なお、減速度制御ユニット10は、アクセル開度センサ32の出力信号に基づいて、踏み込まれていたアクセルペダルが戻されたことを認識すると、アクセルペダルが戻されことを示す信号を図示していないエンジン制御ユニットに出力する。エンジン制御ユニットは、この信号に応じて、燃料、空気の供給を削減して、エンジン回転数を減少せしめ、この抵抗により制動力が生ずるエンジンブレーキ効果を発生させる。つまり、エンジンブレーキは、加速時とは逆に車輪でエンジンを回し、エンジンの回転抵抗を利用して減速することである。
【0037】
なお、上述のように、本実施形態における減速度制御装置100は、減速を開始するタイミングP1であると判定された場合に、エンジンブレーキによって減速度を発生させることで、減速開始タイミングP1を知らせる警報を行うものである。よって、減速度制御装置100は、減速を開始するタイミングP1であると判定した場合、エンジン制御ユニットに対して、エンジンブレーキによって減速度を発生させることを指示する。換言すると、減速度制御装置100は、エンジン制御ユニットに対して、エンジンブレーキ指示信号を出力する。エンジン制御ユニットは、エンジンブレーキ指示信号を取得すると、燃料、空気の供給を削減して、エンジン回転数を減少せしめ、この抵抗により制動力が生ずるエンジンブレーキ効果を発生させる。
【0038】
また、減速度制御装置100は、減速を開始するタイミングP1であると判定された場合、トランスミッションのギア位置を低速ギアにセット(シフトダウン)することで、エンジンブレーキによる減速度を発生させてもよい。
【0039】
ブレーキストロークセンサ33は、ブレーキペダルの踏み込み量(ブレーキ操作量)を検出し、この検出結果を示す出力信号を減速度制御ユニット10に出力する。換言すると、減速度制御ユニット10は、ブレーキペダルの踏み込み量を示す信号を取得する(ブレーキペダル踏み込み量取得手段)。つまり、減速度制御ユニット10は、ブレーキストロークセンサ33からの出力信号に基づいて、ブレーキペダルの踏み込み量(ブレーキペダルの操作状態)を監視している。
【0040】
車速センサ34は、自車両の速度(自車速度vs)を検出し、この検出結果を示す出力信号を減速度制御ユニット10に出力する。換言すると、減速度制御ユニット10は、自車両の速度を示す信号を取得する(自車速度取得手段)。つまり、減速度制御ユニット10は、アクセル開度センサ32からの出力信号に基づいて、アクセルペダルの操作状態を監視している。
【0041】
なお、減速度制御ユニット10は、相対距離xrの時間変化から先行車と自車両との相対速度vr、及び相対速度vrの時間変化から先行車と自車両との相対加速度arを求める(算出する)。換言すると、減速度制御ユニット10は、先行車と自車両との相対速度vrを取得する(相対速度取得手段)とともに、先行車と自車両との相対加速度arを取得する(相対課速度取得手段)。
【0042】
シフトセンサ35は、車両のシフト位置を検出し、この検出結果を示す出力信号を減速度制御ユニット10に出力する。換言すると、減速度制御ユニット10は、シフト位置を示す信号を取得する(シフト位置取得手段)。つまり、減速度制御ユニット10は、シフトセンサ35からの出力信号に基づいて、シフト位置を監視している。
【0043】
画像センサ36は、自車両の前方を撮像し、この撮像結果を示す出力信号を減速度制御ユニット10に出力する。換言すると、減速度制御ユニット10は、車両の前方の画像を示す信号を取得する(前方画像取得手段)。つまり、減速度制御ユニット10は、画像センサ36からの出力信号に基づいて、自車両の前方にある障害物、信号機、停止線、徐行交差点、踏切などを監視している。ただし、本実施形態における減速度制御装置100においては、この画像センサ36が設けられていなくても成り立つものである。
【0044】
地図情報取得部40は、例えば日本全土の道路地図データや、それに付随する、各種施設や店舗等の施設POI(Points Of Interest)データなど各種データを取得して、取得した各種データを減速度制御ユニット10に出力する。
【0045】
道路地図データは、地図上の交差点などをノードとして、道路が複数の部分に分割されており、このノードに関するノードデータ、各ノード間の部位分をリンクとして規定したリンクデータなどを含む。ノードデータは、地図上の各道路が交差、合流、分岐するノード毎に固有の番号を付したノードID、ノード座標、ノード名称等のデータを含んで構成される。また、リンクデータは、リンクID、リンク長、リンクの始点、終点の位置データ、角度(方向)データ、道路幅、道路種別等のデータを含んで構成される。ただし、本実施形態における減速度制御装置100においては、この地図情報取得部40が設けられていなくても成り立つものである。
【0046】
現在位置取得部50は、例えばGPS受信機、ジャイロセンサなどを備えて構成されるものであり、自車両の現在位置を取得して、この現在位置を示す出力信号を減速度制御ユニット10に出力する。ただし、本実施形態における減速度制御装置100においては、この現在位置取得部50が設けられていなくても成り立つものである。
【0047】
ここで、図2〜図4に基づいて、減速度制御装置100の処理動作に関して説明する。図2に示すフローチャートは、イグニッションスイッチがオンになるとスタートするとともに、イグニッションスイッチがオン時に所定時間毎にスタートする。つまり、減速度制御装置100は、イグニッションスイッチがオンになると図2のフローチャートに示す処理を実行するとともに、イグニッションスイッチがオン時に所定時間毎に図2のフローチャートに示す処理を実行する。
【0048】
ステップS10では、減速度制御ユニット10は、車間距離、相対速度、相対加速度を読み込む。つまり、減速度制御ユニット10は、相対距離xr、相対速度vr、相対加速度arを取得(算出)する。
【0049】
ステップS11では、減速度制御ユニット10は、減速開始タイミングP1であるか否かを判定する。そして、減速開始タイミングであると判定した場合はステップS12へ進み、減速開始タイミングでないと判定した場合はステップS10へ戻る。
【0050】
つまり、図3における減速開始タイミングP1であるか否かを判定する。すなわち、警報が必要であるか否かを判定する。この減速開始タイミングP1は、通常走行時と衝突の可能性があるときの間のタイミング(準通常走行時)である。一般的には、衝突の可能性があるときに(タイミングP2で)、警報(例えば、音や表示)を行う。しかしながら、本実施形態においては、衝突の可能性があるとまではいかないが、普段の運転よりは危険な状態(例:通常の車間距離よりも短くなっている状態、又は普段のブレーキ開始タイミングを過ぎてもブレーキを開始していない状態)で、予備的に警報を行うものである。換言すると、急ブレーキすることなく先行車と安全な車間距離を保つ、あるいは先行車や障害物などに対して安全に停止する、あるいは一時停止交差点やカーブ前など安全に走行するために、ある時点までに所定の速度まで減速する必要があるような場合に減速開始タイミングP1と判定する。ただし、本発明はこれに限定されるものではない。タイミングP2で初めて警報(エンジンブレーキによる減速度を用いた警報)を行うようにしてもよい。
【0051】
なお、この減速開始タイミングP1であるか否かを判定する際には、相対距離xr、相対速度vrなどから算出された指標が閾値に達したか否かによって行う。そして、指標が閾値に達していた場合は減速開始タイミングP1であると判定し、指標が閾値に達していた場合は減速開始タイミングP1でないと判定する。この閾値は、ドライバ毎に異なる値を設定することもできる。なお、後ほど説明するタイミングP2〜P5であるか否かを判定する際にも、指標が閾値に達したか否かによって行う。
【0052】
この指標としては、THW(Time Head Way)、TTC(Time To Collision)、TTC2ndなどを採用することができる。ここでは、一例としてTTC2ndを採用する。
【0053】
TTC2ndは、後ほど説明するTTCに対して、相対速度vrに加え相対加速度arも一定であると仮定した指標であり数式1で表される。
【数1】
【0054】
つまり、減速度制御装置100は、自車両と先行車との相対速度vrを検出する相対速度検出手段と、自車両と先行車との相対加速度arを検出する相対加速度検出手段と、自車両と先行車との相対距離xrを検出する相対距離検出手段とを備える。換言すると、減速度制御装置100は、自車両と先行車との相対速度vrを取得(算出)する相対速度取得(算出)手段と、自車両と先行車との相対加速度arを取得(算出)する相対加速度取得(算出)手段と、自車両と先行車との相対距離xrを取得(算出)する相対距離取得(算出)手段とを備える。そして、減速度制御装置100は、数式1で算出した値(指標)が所定値(閾値)に達しているか否かによって減速を開始するタイミングであるか否かを判定する(減速開始タイミング判定手段)。
【0055】
なお、この数式1は、メモリユニット20などの記憶装置に記憶されている。そして、減速度制御ユニット10は、相対距離xr、相対速度vr、相対加速度arを算出(取得)するとともに、メモリユニット20から数式1を読み出して指標を算出する。
【0056】
なお、THWは対象を静止物体と仮定し数式2で表される。
【数2】
【0057】
つまり、減速度制御ユニット10は、自車両の自車速度Vsを検出する自車速度検出手段と、自車両と先行車との相対距離xrを検出する相対距離検出手段とを備える。換言すると、減速度制御装置100は、自車両の速度を取得(算出)する自車速度取得(算出)手段と、自車両と先行車との相対距離xrを取得(算出)する相対距離取得(算出)手段とを備える。そして、減速度制御装置100は、数式2で算出した値(指標)が所定値(閾値)に達しているか否かによって減速を開始するタイミングであるか否かを判定する(減速開始タイミング判定手段)。
【0058】
なお、この数式2は、メモリユニット20などの記憶装置に記憶されている。そして、減速度制御ユニット10は、自車速度Vs、相対距離xrを取得(算出、検出)するとともに、メモリユニット20から数式2を読み出して指標を算出する。
【0059】
この場合、減速度制御装置100としては、自車速度vsと相対距離xrとを取得(算出、検出)できるものであれば採用することができる。つまり、減速度制御ユニット10は、相対速度vrや相対加速度arを取得(算出)できなくてもよい。
【0060】
また、TTCは現在の相対速度で等速直線運動を行った場合の衝突までの時間であり、数式3で表される。
【数3】
【0061】
つまり、減速度制御ユニット10は、自車両と先行車との相対速度vrを検出する相対速度検出手段と、自車両と先行車との相対距離xrを検出する相対距離検出手段とを備える。換言すると、減速度制御ユニット10は、自車両と先行車との相対速度vrを取得(算出)する相対速度取得(算出)手段と、自車両と先行車との相対距離xrを取得(算出)する相対距離取得(算出)手段とを備える。そして、減速度制御装置100は、数式3で算出した値(指標)が所定値(閾値)に達しているか否かによって減速を開始するタイミングであるか否かを判定する(減速開始タイミング判定手段)。
【0062】
なお、この数式3は、メモリユニット20などの記憶装置に記憶されている。そして、減速度制御ユニット10は、相対速度vr、相対距離xrを取得(算出、検出)するとともに、メモリユニット20から数式3を読み出して指標を算出する。
【0063】
この場合、減速度制御装置100としては、相対速度vrと相対距離xrとを取得(算出)できるものであれば採用することができる。つまり、減速度制御ユニット10は、自車速度vsや相対加速度arを取得(算出)できなくてもよい。
【0064】
また、減速度を一定と仮定した場合の算出式(数式4、数式5)、減速時間を一定と仮定した場合の算出式(数式6)を採用することもできる。つまり、相対距離xrが数式4、数式5、数式6で算出されるドライバが減速操作を開始する車間距離HBに達したか否かによって、減速開始タイミングであるか否かを判定するようにしてもよい。
【0065】
なお、以下に示す数式4、数式5、数式6における限界車間時間Hlim及び減速度Gfは、個人パラメータ(個人によってその値が異なる)である。よって、ドライバの運転特性の統計をとり、統計的に決定した限界車間時間Hlim及び減速度Gfを用いることにより、個人適応が可能となる。つまり、ドライバの運転特性に応じて、減速開始タイミングであるか否かを適切に判定することができる。換言すると、ドライバ毎に減速開始タイミングであるか否かを適切に判定することができる。
【数4】
【0066】
この場合、減速度制御装置100としては、自車速度vsと相対速度vrとを取得(算出、検出)できるものであり、個人パラメータ(個人によってその値が異なる)である限界車間時間Hlim及び減速度Gfを設定可能なものであれば採用することができる。
【数5】
【0067】
この場合、減速度制御装置100としては、相対距離xrと自車速度vsと相対速度vrとを取得(算出、検出)できるものであり、個人パラメータ(個人によってその値が異なる)である限界車間時間Hlim及び減速度Gfを設定可能なものであれば採用することができる。
【数6】
【0068】
この場合、減速度制御ユニット10としては、相対距離xrと自車速度vsと相対速度vrと相対加速度arを取得(算出、検出)できるものであり、現在からの予想時間τ、及び個人パラメータ(個人によってその値が異なる)である限界車間時間Hlim及び減速度Gfを設定可能なものであれば採用することができる。
【0069】
なお、これらの数式4乃至6は、メモリユニット20などの記憶装置に記憶されている。そして、減速度制御ユニット10は、相対距離xrや自車速度vsなどを取得(算出、検出)するとともに、メモリユニット20から数式4乃至6のいずれかを読み出して指標を算出する。
【0070】
また、減速開始タイミングであるか否かを判定する際には、これらの数式1乃至数式6を用いなくてもよい。例えば、ドライバの運転特性の統計を取ることで(学習することで)、統計的に「通常の車間距離」や「通常の減速タイミング」のデータを収集する。この統計的データに基づいて、減速開始タイミングであるか否かを判定するようにしてもよい。
【0071】
なお、これらを適宜組み合わせて、減速開始タイミングであるか否かを判定するようにしてもよい。
【0072】
また、本実施形態における減速度制御装置100は、図3,図4に示すように、自車両と先行車との状況(すなわち、先行車との衝突の可能性、数式1などによる指標)に応じた減速度(α1、α2、α3、α4、α5、A)を車両に印加するものである。つまり、減速度制御装置100は、算出された指標に基づいて、各減速度(α1、α2、α3、α4、α5、A)を印加するタイミング(P1〜P5)を判定している。よって、各タイミングに対応して閾値(例えば、タイミングP1に対する閾値1、タイミングP2に対する閾値2、タイミングP3に対する閾値3、タイミングP4に対する閾値4、タイミングP5に対する閾値5)が設定されている。
【0073】
次に、ステップS12では、減速度制御ユニット10は、ドライバに減速度印加(自車両に対する減速度の印加)不要の意思があるか否かを判定する。そして、不要意思があると判定した場合はステップS21へ進み、不要意思がないと判定した場合はステップS13へ進む。
【0074】
このとき、減速度制御ユニット10は、例えばドライバによって操作されると不要意思を示す信号を出力するスイッチ等から、この不要意思を示す信号を取得したか否かによって判断する。
【0075】
又は、減速度制御ユニット10は、アクセル開度センサ32から取得したアクセル開度(アクセル操作量)が所定値に達しているか否か、あるいはアクセル操作量の単位時間当たりの変化量(時間微分値)が所定値に達しているか否か、あるいはそれら両方によって判断してもよい。つまり、減速度制御ユニット10は、アクセル開度センサ32から取得したアクセル開度(アクセル操作量)に基づいて、不要意思の有無を判断することができる。よって、減速度制御ユニット10は、アクセル開度、あるいはアクセル操作量の単位時間当たりの変化量(時間微分値)、あるいはそれら両方が所定値に達していた場合は不要意思があると判定し、達していない場合は不要意思がないと判定する。
【0076】
又は、減速度制御ユニット10は、ブレーキストロークセンサ33から取得したブレーキペダルの踏み込み量(ブレーキ操作量)が所定値に達しているか否か、あるいはブレーキ操作量の単位時間当たりの変化量(時間微分値)が所定値に達しているか否か、あるいはそれら両方によって判断してもよい。つまり、減速度制御ユニット10は、ブレーキストロークセンサ33から取得したブレーキペダルの踏み込み量(ブレーキ操作量)に基づいて、不要意思の有無を判断することができる。よって、減速度制御ユニット10は、ブレーキ操作量、あるいはブレーキ操作量の単位時間当たりの変化量(時間微分値)が所定値に達しているか否か、あるいはそれら両方が所定値に達していた場合は不要意思があると判定し、達していない場合は不要意思がないと判定する。
【0077】
又は、減速度制御ユニット10は、車速センサ34から取得した自車速度vsが所定値に達しているか否かによって判断してもよい。例えば、減速度制御ユニット10は、自車速度vsおよび自車速度vsの時間変化量(自車加速度as)、あるいはそれら両方が所定値に達していた場合は不要意思があると判定し、自車速度vsが所定値に達していない場合は不要意思がないと判定する。
【0078】
さらに、これらを適宜組み合わせて判断してもよい。
【0079】
ステップS13では、減速度制御ユニット10は、減速度による警報を行う。つまり、ドラムブレーキ(主ブレーキ)を用いた減速度を発生させて減速を開始するタイミングP1であることを示す警報(すなわち、「減速開始タイミングを知らせる警報」、「減速すべき状況であることを知らせる警報」)を行う。このとき、減速度制御ユニット10は、図3のタイミングP1において、エンジンブレーキ(補助ブレーキ)によって減速度α1(ドライバが感じることができる程度の減速度)を発生させることで、減速開始タイミングを知らせる警報を行う(警報手段)。すなわち、エンジンブレーキによって減速度を発生させて、車両のドライバに対して減速度を感じさせることによって警報を行うものである。また、ここでは、エンジンブレーキ(補助ブレーキ)による減速度α1で警報を行うとともに、音(ブザーや音声など)や表示(インジケータや文字表示)で警報を行うようにしてもよい。
【0080】
なお、このエンジンブレーキによって減速度α1を発生させるのは、あくまでも減速開始タイミングを知らせる警告のためである。よって、減速度α1は、車両のドライバに対して減速度を感じさせることができる程度の大きさである。
【0081】
ステップS14では、減速度制御ユニット10は、衝突危険性の指標を算出する。この衝突危険性の指標は、上述の数式1を用いて算出する。
【0082】
ステップS15では、減速度制御ユニット10は、ステップS14で算出した指標が閾値(閾値5)以上であるか否かを判定する。つまり、図3におけるタイミングP5であるか否かを判定する。すなわち、プリクラッシュブレーキ(介入制動、減速度A)が必要であるか否かを判定する。そして、指標が閾値5以上であった場合はステップS16へ進み、指標が閾値5以上でなかった場合はステップS18へ進む。また、図3におけるタイミングP5においては、プリクラッシュブレーキの他に、プリクラッシュシートベルト(急制動時に乗員の姿勢を抑えるために、シートベルトを巻き上げること)を行うようにしてもよい。
【0083】
ステップS16では、減速度制御ユニット10は、緊急ブレーキをかける。このとき、減速度制御ユニット10は、ドラムブレーキによる制動制御を行い、車両に対して減速度Aを印加する。つまり、プリクラッシュブレーキ(介入制動、減速度A)を行う。つまり、このような場合は、衝突被害最小化するために、短時間(急速)に強い制動力を印加する。
【0084】
ステップS17では、減速度制御ユニット10は、安全になったか否かを判定する。このとき、減速度制御ユニット10は、数式1で算出して指標が閾値1に達しているか否かを判定する。そして、指標が閾値1に達していない場合は安全になったとみなしてステップS21へ進み、指標が閾値1に達していた場合は安全になったとみなすことなくステップS13へ戻る。
【0085】
ステップS18では、減速度制御ユニット10は、減速度段階変化タイミングであるか否かを判定する。このとき、減速度制御ユニット10は、ステップS14で算出した指標が前回の値から変化しているか否かによって、減速度段階変化タイミングであるか否かを判定する。そして、ステップS14で算出した指標が前回の値から変化している場合は減速度段階変化タイミングであるとみなしてステップS19へ進み、変化していない場合は減速度段階変化タイミングでないとみなしてステップS20へ進む。
【0086】
ステップS19では、減速度制御ユニット10は、減速度段階を変化させる。例えば、前回の減速度がα1であり、今回の指標が閾値2に達していた(閾値3未満)場合、減速度制御ユニット10は、減速度をα1からα2に大きくする。同様に、前回の減速度がα2であり、今回の指標が閾値3に達していた(閾値4未満)場合、減速度制御ユニット10は、減速度をα2からα3に大きくする。また、前回の減速度がα2であり、今回の指標が閾値1に達していた(閾値2未満)場合、減速度制御ユニット10は、減速度をα2からα1に小さくする。
【0087】
ステップS20では、減速度制御ユニット10は、衝突危険性(指標)に応じた減速度を車両に対して印加する。つまり、前回と同じ減速度を発生させる。
【0088】
なお、図3,4に示すように、減速度制御ユニット10は、指標が閾値2に達しており、閾値3に達していなかった場合(つまり、タイミングP2で)は、減速度α2を車両に対して印加する。このとき、減速度制御ユニット10は、エンジンブレーキ(補助ブレーキ)によって減速度α2を発生させることで、減速開始タイミングを知らせる警報を再度行う(警報手段)。
【0089】
また、図3,4に示すように、減速度制御ユニット10は、指標が閾値3に達しており、閾値4に達していなかった場合(つまり、タイミングP3で)は、衝突の可能性があるとみなして、減速度α3を車両に対して印加する。このとき、減速度制御ユニット10は、エンジンブレーキ(補助ブレーキ)によって減速度α3を発生させることで、減速開始タイミングを知らせる警報を再度行う(警報手段)。なお、ここで初めて、エンジンブレーキ(補助ブレーキ)による警報を行うとともに、音(ブザーや音声など)や表示(インジケータや文字表示)で警報を行うようにしてもよい。
【0090】
このように、エンジンブレーキによる減速度を複数回発生させて警報を行うようにしてもよい。つまり、車両のドライバに対して、減速度を複数回与えることによって、減速開始タイミングを知らせる警報を行うようにしてもよい。つまり、一回目の警報(減速度α1)を行ったにもかかわらずドライバがブレーキを踏まない、又は加速度をつけるなど減速する意思が見られなく、指標が次段の閾値(例えば閾値2)に達した場合などは、エンジンブレーキによる減速度を複数回発生させて警報を行い、ドライバに減速するべき状況であることを示唆してもよい。
【0091】
例えば、エンジンブレーキが発生可能な減速度(換言すると、減速度を発生させるための制動力)が比較的小さい場合もありうる。しかしながら、このようにすることによって、ドライバに対して減速度を感じさせやすくすることができる。従って、エンジンブレーキが発生可能な減速度が比較的小さい場合であっても、減速すべき状況であることを知らせることができる。
【0092】
また、このように、エンジンブレーキによる減速度を複数回発生させる際には、減速度の大きさ(換言すると、減速度を発生させるための制動力の大きさ)を段階的に大きくするようにしてもよい。つまり、衝突の可能性が高まるに連れて、減速度の大きさを段階的に大きくするようにしてもよい。ここでは、減速度α1、α2、α3の順に段階的に大きくする。
【0093】
このようにすることによって、同じ大きさの減速度を複数回発生させる場合よりも、ドライバに対して減速度を感じさせやすくすることができる。従って、減速すべき状況であることを確実に知らせることができる。ただし、本発明はこれに限定されるものではない。例えば、衝突の可能性が高まっても、同じ減速度(例えばα1)を複数回発生させて警報を行うようにしてもよい。
【0094】
また、ここでは、指標が変化することで、エンジンブレーキによる減速度を複数回発生させて警報を行う例を採用したが、本発明はこれに限定されるものではない。指標が閾値1に達しており、閾値2に達していなかった場合に(つまり、タイミングP1からP2の間で)、エンジンブレーキによる減速度を複数回発生させて警報を行うようにしてもよい。このようにしても、同様の効果を奏することができる。なお、タイミングP2からP3の間でも同様に減速度を複数回発生させて警報を行うようにしてもよい。
【0095】
また、このように、タイミングP1からP2の間でエンジンブレーキによる減速度を複数回発生させる際には、エンジンブレーキによる減速度を不連続なタイミングで発生させるようにしてもよい。このようにすることによって、等間隔(時間的に等間隔)でエンジンブレーキによる減速度を発生させる場合よりも、ドライバに対して減速度を感じさせやすくすることができる。従って、減速すべき状況であることを確実に知らせることができる。なお、タイミングP2からP3の間でも同様に減速度を複数回発生させて警報を行うようにしてもよい。
【0096】
なお、タイミングP1からP2の間でエンジンブレーキによる減速度を複数回発生させる場合であっても、減速度を徐々に大きくしていってもよい。このようにすることによって、同じ大きさの減速度を複数回発生させる場合よりも、ドライバに対して減速度を感じさせやすくすることができる。従って、減速すべき状況であることを確実に知らせることができる。なお、タイミングP2からP3の間でも同様に減速度を複数回発生させて警報を行うようにしてもよい。
【0097】
また、タイミングP1からP2の間でエンジンブレーキによる減速度を大きくしていって複数回減速度を発生させる場合、各減速度の増加率を変化させてもよい(例えば危険度に応じて各減速度の増加率を変化させてもよい)。このようにすることによって、より一層、ドライバに対して減速度を感じさせやすくすることができる。従って、減速すべき状況であることを確実に知らせることができる。なお、タイミングP2からP3の間でも同様に減速度を複数回発生させて警報を行うようにしてもよい。
【0098】
ただし、本発明はこれに限定されるものではない。例えば、タイミングP1からP2の間やタイミングP2からP3の間で、同じ減速度(例えばα1)を複数回発生させて警報を行うようにしてもよい。
【0099】
なお、本発明は、このようにエンジンブレーキによる減速度を複数回発生させて警報を行うものに限定されるものではない。エンジンブレーキによる減速度を一回発生させることで、減速を開始するタイミングP1であることを示す警報を行うようにしてもよい。この場合、短時間(急速)にエンジンブレーキによる減速度(ドライバが感じることができる程度の減速度)を発生させるようにすると好ましい。
【0100】
また、図3,4に示すように、減速度制御ユニット10は、指標が閾値4に達しており、閾値5に達していなかった場合(つまり、タイミングP4で)は、ドライバがブレーキペダルを踏むと、減速度α4(補助制動力)を車両に対して印加する。このとき、減速度制御ユニット10は、ドラムブレーキ(主ブレーキ)によって減速度α4を発生させることで、ドライバのブレーキ操作による制動力よりも制動力を高める。つまり、ドライバの操作による減速を補助する。なお、タイミングP4では、ドラムブレーキで減速度を発生させることで警報を行った後に、減速度α4(補助制動力)を車両に対して印加するようにしてもよい。
【0101】
ステップS21では、減速度の印加量をゼロにする。減速度制御ユニット10は、まだ減速度を印加していない場合は減速度の印加を行わないようにする。つまり、減速度制御ユニット10は、自動制動(ドライバのブレーキペダル操作に基づかない制動)を行わないようにする。例えば、ステップS12の判定においてNO判定がなされた場合(ドライバに減速度印加不要の意思がある場合)には、減速度の印加を取りやめても良い。又は、既に減速度を印加している場合はその減速度をゼロにする。つまり、減速度制御ユニット10は、自動制動(ドライバのブレーキペダル操作に基づかない制動)を中止する。例えば、ステップS13,S16,S19,S120において既に減速度を印加している場合は、その減速度をゼロにする。
【0102】
このように、エンジンブレーキを用いて警報を行うことによって、ドラムブレーキ(又はディスクブレーキ)の使用頻度を減らすことができる。従って、ドラムブレーキ(又はディスクブレーキ)におけるフェード現象やヴェイパーロック現象を抑制しつつ、減速すべき状況であることを知らせることができる。
【0103】
なお、ドライバに対する警報としては、一般的にアラーム音やインジケータを採用することも考えられる。しかしながら、車室内で発生されるアラーム音やインジケータによる警報は、減速に関するものだけではない。よって、アラーム音やインジケータによって減速開始タイミングを知らせる警報を行った場合、ドライバが他のコンテンツ(システム)のアラーム音やインジケータと混同してしまうことがありうる。つまり、ドライバに対して「減速を開始するタイミングである(減速すべき状況である)」という警報内容を直観的に理解させることができない可能性がある。
【0104】
また、音声や文字表示を用いて減速開始タイミングを知らせる警報を行うことも考えられる。しかしながら、このように音声や文字表示を用いた警報の場合、ドライバは、内容を聞き取り理解する時間や文字を読み理解する時間が必要となる。例えば、音声や文字表示で「減速を開始するタイミングです!」などの警報を行うと、この長さから内容を聞き取り理解する時間や文字を読み理解する時間が必要となる。よって、ドライバの運転に対する注意力が散漫したり、警報に対する即応性が失われたりする可能性がある。
【0105】
これに対して、減速度を利用して減速開始タイミングを知らせる警報を行った場合、主ブレーキを用いて減速度を発生させた場合と同様に、ドライバに対して減速度を感じさせることになる。従って、アラーム音やインジケータ、又は音声や文字表示を採用する場合よりも、「減速を開始するタイミングである」という警報内容を、ドライバに対して直観的に理解させやすくすることができる。よって、「減速を開始するタイミングである」という警報内容に対する即応性が失われことを抑制できる。これによって、イージードライブを実現することができる。
【0106】
また、ドライバが減速すべき状況であることを知覚している場合、或いは誤作動で警報が発生する場合もある。このような場合、音や表示によって警報を行うと、ドライバは煩わしく感じることがある。これに対して、本実施形態においては、エンジンブレーキによる減速度で警報を行うので、つまり、比較的自然な減速度(制動力)の印加であるため、このような場合であっても、音や表示によって警報を行うよりも、ドライバが煩わしく感じることを抑制できる。
【0107】
さらに、エンジンブレーキによる減速度で警報を行うので、アクセルを踏み込むことですぐに速度回復ができる。よって、ドラムブレーキによって警報を行う場合よりも、再加速による燃料の無駄が発生することを抑制できる。
【0108】
以上、本発明の好ましい実施形態について説明したが、本発明は上述した実施形態に何ら制限されることはなく、本発明の趣旨を逸脱しない範囲において、種々の変形が可能である。つまり、本発明における車両減速度制御装置は、ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度と、このブレーキ以外の補助ブレーキを用いた減速度とを発生させることができる車両に搭載されるものであって、ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度を発生させて減速を開始するタイミングであるか否かを判定する減速開始タイミング判定手段と、減速開始タイミング判定手段によって減速を開始するタイミングであると判定された場合に、補助ブレーキによって減速度を発生させることで減速を開始するタイミングであることを示す警報を行う警報手段と、を備えるものであれば、本発明の目的は達成できる。
【0109】
なお、本実施形態においては、補助ブレーキとしてエンジンブレーキを採用した。しかしながら、本発明はこれに限定されるものではない。
【0110】
例えば、原動機として電動モータを用いる車両は、ディスクブレーキやドラムブレーキの他に、回生ブレーキによって減速度を発生させることができる。そこで、原動機として電動モータを用いる車両に減速度制御装置100が搭載される場合、補助ブレーキとしては、回生ブレーキを採用するようにしてもよい。この回生ブレーキは、回転力を発電機を回すことに利用することで減速力を発生するものである。つまり、通常は駆動力として用いている電動機(電動モータ)を発電機として作動させ、運動エネルギーを電気エネルギーに変換して回収することで減速力を発生するものである。なお回生ブレーキは、周知技術であるため詳しい説明は省略する。
【0111】
また、原動機として電動モータを用いる車両は、ディスクブレーキやドラムブレーキの他に、発電ブレーキによって減速度を発生させることができる。そこで、原動機として電動モータを用いる車両に車両減速度制御装置100が搭載される場合、補助ブレーキとしては、発電ブレーキを採用するようにしてもよい。この発電ブレーキは、抵抗器に電気を通し、熱エネルギーとして捨てたり、発電機を逆回転に回転させる方向の回転抵抗を生じさせることで減速力を発生させるものである。つまり、電動機(電動モータ)内で通常駆動とは逆の回転抵抗を生じさせることで減速力を発生させるものである。なお発電ブレーキは、周知技術であるため詳しい説明は省略する。
【0112】
また、原動機としてディーゼルエンジンを用いる車両は、ディスクブレーキやドラムブレーキの他に、排気ブレーキによって減速度を発生させることができる。そこで、原動機としてディーゼルエンジンを用いる車両に車両減速度制御装置100が搭載される場合、補助ブレーキとしては、排気ブレーキを採用するようにしてもよい。この排気ブレーキは、排気管の途中に設けられたバルブを閉じることで、排気圧力を高め減速度を発生させるものである。なお排気ブレーキは、周知技術であるため詳しい説明は省略する。
【0113】
このように、補助ブレーキとして、回生ブレーキ、発電ブレーキ、排気ブレーキなどを用いた場合であっても、本発明の目的は達成できる。また、ディスクブレーキやドラムブレーキとともに車両に設けられた、ディスクブレーキやドラムブレーキとは異なる減速度を発生させる手段(機能)を補助ブレーキとして用いることによって、特別に補助ブレーキを設ける必要がないので好ましい。
【0114】
また、本実施形態においては、指標を算出する際の相対距離xrなどの対象として、先行車を採用したが本発明はこれに限定されるものではない。車両減速度制御装置100が搭載された車両が減速すべき状況であれば同様に実施することができる。
【0115】
例えば、自車両の前方にある障害物(歩行者、落下物、壁面、立体物)、法規で減速あるいは停止が定められている地点(信号機、停止線、徐行交差点、踏切)、カーブへの進入地点などを対象として採用することもできる。このような対象を採用する場合、上述の画像センサ36、地図情報取得部40、現在位置取得部50を用いることによって、指標を算出することができる。つまり、減速度制御ユニット10は、画像センサ36、地図情報取得部40、現在位置取得部50からの出力された出力信号や各種データに基づいて、対象を決定することができるとともに、指標を算出する際の各種情報(相対距離xrなど)を算出することができる。
【0116】
例えば、自車両の前方の信号機が、停止位置を越えて進んではいけないことを示す状態(赤信号)であった場合を一例として説明する。この場合、減速度制御ユニット10は、画像センサ36からの出力信号に基づいて、自車両の前方の信号機が赤信号であることを認識する。換言すると、減速度制御ユニット10は、自車両の前方の信号機が赤信号であること示す信号を取得(検出、算出)する。さらに、減速度制御ユニット10は、自車両から信号機(又は、信号機に対応して設けられた停止線)までの距離(自車両と信号機との相対距離xr)を取得(検出、算出)する。また、減速度制御ユニット10は、自車両の自車速度Vsを取得(検出、算出)する。そして、減速度制御ユニット10は、この相対距離xrと自車速度Vsと、上述の数式2を用いて、指標を算出する。
【0117】
このように、障害物(歩行者、落下物、壁面、立体物)、法規で減速あるいは停止が定められている地点(信号機、停止線、徐行交差点、踏切)、カーブへの進入地点などを対象として採用した場合であっても、本発明の目的は達成できる。
【0118】
つまり、減速度制御装置100(減速開始タイミング判定手段)は、ある地点で停止又は所定の速度になっているために、主ブレーキを用いた減速度を発生させて減速を開始するタイミングを判定するものである。よって、ある地点(言い換えると、減速対象地点)は、先行車の位置、自車両の前方にある障害物(歩行者、落下物、壁面、立体物)の位置、法規で減速あるいは停止が定められている地点(信号機、停止線、徐行交差点、踏切)、カーブへの進入地点を採用することができる。
【符号の説明】
【0119】
10 減速度制御ユニット、20 メモリユニット、30 センサ部、31 車間距離センサ、32 アクセル開度センサ、33 ブレーキストロークセンサ、34 車速センサ、35 シフトセンサ、36 画像センサ、40 地図情報取得部、50 現在位置取得部、60 リニア弁、61 FRリニア弁、62 FLリニア弁、63 RRリニア弁、64 RLリニア弁、71〜74 減圧弁、81,82 ソレノイド弁、100 車両減速度制御装置
【特許請求の範囲】
【請求項1】
ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度と、当該ブレーキ以外の補助ブレーキを用いた減速度とを発生させることができる車両に搭載される車両減速度制御装置であって、
前記ディスクブレーキ及び前記ドラムブレーキの少なくとも一方を用いた減速度を発生させて減速を開始するタイミングであるか否かを判定する減速開始タイミング判定手段と、
前記減速開始タイミング判定手段によって減速を開始するタイミングであると判定された場合に、前記補助ブレーキによって減速度を発生させることで減速を開始するタイミングであることを示す警報を行う警報手段と、
を備えることを特徴とする車両減速度制御装置。
【請求項2】
前記警報手段は、前記補助ブレーキによる減速度を複数回発生させることで減速を開始するタイミングであることを示す警報を行うことを特徴とする請求項1に記載の車両減速度制御装置。
【請求項3】
前記警報手段は、前記補助ブレーキによる減速度を複数回発生させる際には、減速度の大きさを段階的に大きくすることを特徴とする請求項2に記載の車両減速度制御装置。
【請求項4】
前記警報手段は、前記補助ブレーキによる減速度を複数回発生させる際には、前記補助ブレーキによる減速度を不連続なタイミングで発生させることを特徴とする請求項2又は3に記載の車両減速度制御装置。
【請求項5】
前記警報手段は、前記補助ブレーキによる減速度を一回発生させることで、減速を開始するタイミングであることを示す警報を行うことを特徴とする請求項1に記載の車両減速度制御装置。
【請求項6】
原動機としてガソリンエンジンを用いる車両に搭載されるものであり、
前記補助ブレーキは、エンジンブレーキであることを特徴とする請求項1乃至5のいずれか一項に記載の車両減速度制御装置。
【請求項7】
原動機として電動モータを用いる車両に搭載されるものであり、
前記補助ブレーキは、回生ブレーキであることを特徴とする請求項1乃至5のいずれか一項に記載の車両減速度制御装置。
【請求項8】
原動機として電動モータを用いる車両に搭載されるものであり、
前記補助ブレーキは、発電ブレーキであることを特徴とする請求項1乃至5のいずれか一項に記載の車両減速度制御装置。
【請求項9】
原動機としてディーゼルエンジンを用いる車両に搭載されるものであり、
前記補助ブレーキは、排気ブレーキであることを特徴とする請求項1乃至5のいずれか一項に記載の車両減速度制御装置。
【請求項1】
ディスクブレーキ及びドラムブレーキの少なくとも一方を用いた減速度と、当該ブレーキ以外の補助ブレーキを用いた減速度とを発生させることができる車両に搭載される車両減速度制御装置であって、
前記ディスクブレーキ及び前記ドラムブレーキの少なくとも一方を用いた減速度を発生させて減速を開始するタイミングであるか否かを判定する減速開始タイミング判定手段と、
前記減速開始タイミング判定手段によって減速を開始するタイミングであると判定された場合に、前記補助ブレーキによって減速度を発生させることで減速を開始するタイミングであることを示す警報を行う警報手段と、
を備えることを特徴とする車両減速度制御装置。
【請求項2】
前記警報手段は、前記補助ブレーキによる減速度を複数回発生させることで減速を開始するタイミングであることを示す警報を行うことを特徴とする請求項1に記載の車両減速度制御装置。
【請求項3】
前記警報手段は、前記補助ブレーキによる減速度を複数回発生させる際には、減速度の大きさを段階的に大きくすることを特徴とする請求項2に記載の車両減速度制御装置。
【請求項4】
前記警報手段は、前記補助ブレーキによる減速度を複数回発生させる際には、前記補助ブレーキによる減速度を不連続なタイミングで発生させることを特徴とする請求項2又は3に記載の車両減速度制御装置。
【請求項5】
前記警報手段は、前記補助ブレーキによる減速度を一回発生させることで、減速を開始するタイミングであることを示す警報を行うことを特徴とする請求項1に記載の車両減速度制御装置。
【請求項6】
原動機としてガソリンエンジンを用いる車両に搭載されるものであり、
前記補助ブレーキは、エンジンブレーキであることを特徴とする請求項1乃至5のいずれか一項に記載の車両減速度制御装置。
【請求項7】
原動機として電動モータを用いる車両に搭載されるものであり、
前記補助ブレーキは、回生ブレーキであることを特徴とする請求項1乃至5のいずれか一項に記載の車両減速度制御装置。
【請求項8】
原動機として電動モータを用いる車両に搭載されるものであり、
前記補助ブレーキは、発電ブレーキであることを特徴とする請求項1乃至5のいずれか一項に記載の車両減速度制御装置。
【請求項9】
原動機としてディーゼルエンジンを用いる車両に搭載されるものであり、
前記補助ブレーキは、排気ブレーキであることを特徴とする請求項1乃至5のいずれか一項に記載の車両減速度制御装置。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−99978(P2013−99978A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−243635(P2011−243635)
【出願日】平成23年11月7日(2011.11.7)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月7日(2011.11.7)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]