
車両測位システムおよびナビゲーション装置
【課題】より高い利便性、且つ、より高い汎用性を有しながら、初期測位時間を短縮することが可能な車両測位システムおよびナビゲーション装置を提供する。
【解決手段】車両3を輸送する輸送機器2に搭載され、輸送機器2の現在位置を検出する輸送機器位置検出装置10と、輸送機器2に搭載され、輸送機器位置検出装置10によって検出された輸送機器位置の情報を送信する近距離無線通信装置20と、を含むとともに、ナビゲーション装置30は、輸送機器2に搭載されている近距離無線通信装置20からの輸送機器位置の情報を受信する送受信機42と、送受信機42によって輸送機器位置の情報が受信されたことに基づいて、現在位置を輸送機器位置の情報が示す位置に補正する制御装置38と、を含む。
【解決手段】車両3を輸送する輸送機器2に搭載され、輸送機器2の現在位置を検出する輸送機器位置検出装置10と、輸送機器2に搭載され、輸送機器位置検出装置10によって検出された輸送機器位置の情報を送信する近距離無線通信装置20と、を含むとともに、ナビゲーション装置30は、輸送機器2に搭載されている近距離無線通信装置20からの輸送機器位置の情報を受信する送受信機42と、送受信機42によって輸送機器位置の情報が受信されたことに基づいて、現在位置を輸送機器位置の情報が示す位置に補正する制御装置38と、を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、初期測位に要する時間を短縮する車両測位システムおよびナビゲーション装置に関するものである。
【背景技術】
【0002】
従来から、GPS(Global Positioning System)衛星からの信号電波を受信することによって車両などの現在位置を検出し、得られた現在位置の情報を操縦者に提示するナビゲーション装置が知られている。
【0003】
また、このようなナビゲーション装置を搭載した車両を、ナビゲーション装置の電源をOFFにして他の車両・船舶等によって輸送した後に、ナビゲーション装置の電源をONにして初期測位を開始しようとした場合、初期測位に要する時間(初期測位時間)が、かなりかかることが知られている。特に、日本から米国・欧州等へ輸送を行う場合のように、長距離、長時間の輸送の場合には、初期測位時間が数十分かかる問題があることが知られている。なお、電源の遮断前と遮断後の再起動時とで測位位置が大きく異なる場合では、GPS衛星の探索を効率化させるのに必要な現在位置近辺の位置情報が上述の再起動時のナビゲーション装置には記憶されていないため、GPS衛星の捕捉に時間がかかり、この問題が生じる。
【0004】
そこで、この問題を解決する手段として、例えば、特許文献1には、GPS受信機を備えた携帯端末から位置情報を受信し、その位置情報に基づいて、探索可能なGPS衛星の選択を行うことによって、ナビゲーション装置での初期測位時間を短縮する測位システムが開示されている。
【0005】
他にも、初期測位時間を短縮する技術として、例えば特許文献2には、準天頂衛星を利用した測位システムにおいて、複数の準天頂衛星のうちの一部をサーチした後にGPS衛星などの非準天頂衛星のサーチを行うことによって準天頂衛星サーチの時間を短縮し、ナビゲーション装置での初期測位時間を短縮する衛星電波受信機が開示されている。
【特許文献1】特開2005−214757号公報
【特許文献2】特開2006−317225号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示の測位システムでは、ナビゲーション装置での初期測位時間を短縮するためには携帯端末が必須となるため、携帯端末の使用できないエリアでは使用できず不便であるという問題点を有している。
【0007】
また、特許文献2に開示の衛星電波受信機では、GPS衛星と準天頂衛星とを利用する測位システムに用いられるナビゲーション装置での初期測位時間を短縮することしかできない。すなわち、準天頂衛星を利用しない測位システムに用いられるナビゲーション装置での初期測位時間は短縮することができず、汎用性が低いという問題点を有している。
【0008】
本発明は、上記従来の問題点に鑑みなされたものであって、その目的は、より高い利便性、且つ、より高い汎用性を有しながら、初期測位時間を短縮することが可能な車両測位システムおよびナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0009】
請求項1の車両測位システムは、上記課題を解決するために、車両に搭載されて、測位用の人工衛星からの測位信号に基づいて現在位置を検出するナビゲーション装置を備えた車両測位システムであって、前記車両を輸送する輸送機器に搭載され、その輸送機器の現在位置を検出する現在位置検出装置と、前記輸送機器に搭載され、前記現在位置検出装置によって検出された現在位置の情報である現在位置情報を送信する近距離無線送信装置と、を含むとともに、前記ナビゲーション装置は、前記輸送機器に搭載されている近距離無線送信装置からの前記現在位置情報を受信する無線受信機と、その無線受信機によって前記現在位置情報が受信されたことに基づいて、現在位置をその現在位置情報が示す位置に補正する現在位置補正手段と、を含むことを特徴としている。
【0010】
これによれば、車両側のナビゲーション装置が、輸送機器側の現在位置検出装置から、輸送機器の現在位置の情報である現在位置情報を得て、現在位置をその現在位置情報が示す位置に補正することができる。よって、ナビゲーション装置の電源を遮断して長距離輸送が行われた車両について、輸送先で現在位置情報を輸送機器に搭載された現在位置検出装置から得れば、輸送先の位置情報を得ることができる。ナビゲーション装置では、現在位置近辺の位置情報を有している場合にはGPS衛星の探索を効率化できるので、請求項1によれば、ナビゲーション装置での初期測位時間を短縮することが可能になる。
【0011】
また、請求項1によれば、ナビゲーション装置が、近距離無線送信装置から送信される現在位置情報を、無線受信機によって受信することができるので、GPS受信機を備えた携帯端末から現在位置情報を得る場合のように、携帯端末の使用できないエリアでは位置情報が得られなくなるという不便利が生じない。
【0012】
さらに、請求項1によれば、輸送機器側の現在位置検出装置で既に得られている現在位置情報をナビゲーション装置が得て、現在位置をその現在位置情報が示す位置に補正することができるので、測位用の人工衛星の種類によらずに、ナビゲーション装置での初期測位時間を短縮することができる。
【0013】
また、請求項2の車両測位システムでは、前記現在位置補正手段は、前記ナビゲーション装置が再起動されたときに前記無線受信機によって受信された現在位置情報を用いて現在位置を補正することを特徴としている。
【0014】
これによれば、再起動時に現在位置情報を得ることができるようになるので、ユーザにとって使い勝手が向上する。
【0015】
また、請求項3の車両測位システムでは、前記現在位置補正手段は、ユーザの操作によって前記ナビゲーション装置の電源が遮断されている期間に、定期的に前記無線受信機を起動させ、無線受信機によって前記現在位置情報が受信されたことに基づいて、現在位置をその現在位置情報が示す位置に補正することを特徴としている。
【0016】
これによれば、再起動させられる前に現在位置情報を得ることができるようになるので、ユーザにとって使い勝手が向上する。
【0017】
また、請求項4のナビゲーション装置は、上記課題を解決するために、車両に搭載されて、測位用の人工衛星からの測位信号に基づいて現在位置を検出するナビゲーション装置であって、車両を輸送する輸送機器に搭載された近距離無線送信装置から、その輸送機器の現在位置を示す現在位置情報を受信する無線受信機と、その無線受信機によって前記現在位置情報が受信されたことに基づいて、現在位置をその現在位置情報が示す位置に補正する現在位置補正手段と、を備えることを特徴としている。
【発明を実施するための最良の形態】
【0018】
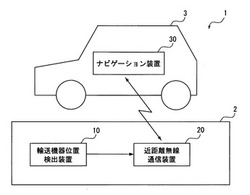
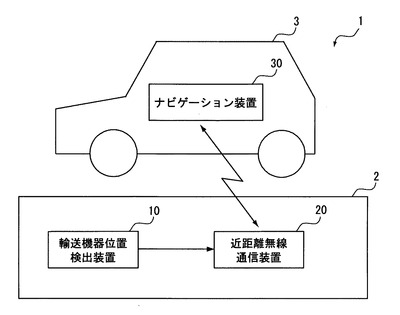
以下、本発明の実施形態について図面を用いて説明する。図1は、車両測位システム1の概略的な構成を示すブロック図である。図1に示す車両測位システム1は、輸送機器位置検出装置10、近距離無線通信装置20、およびナビゲーション装置30を含んでいる。
【0019】
まず、輸送機器位置検出装置10は、輸送機器2に搭載され、GPS衛星からの測位信号に基づいて輸送機器2の現在位置(以降では、輸送機器位置と呼ぶ)を検出するものである。よって、輸送機器位置検出装置10は、請求項の現在位置検出装置として機能する。なお、輸送機器位置検出装置10では、起動中は定期的に現在位置の検出を行う。ここで言うところの定期的とは、例えば数秒〜数分ごとである。
【0020】
近距離無線通信装置20は、輸送機器2に搭載され、輸送機器位置検出装置10で検出された輸送機器位置の情報(請求項の現在位置情報に対応)をDSRC(Dedicated Short RangeCommunication)によって送信するものである。よって、近距離無線通信装置20は、請求項の近距離無線送信装置として機能する。なお、近距離無線通信装置20の送信範囲は数メートル〜数百メートルである。
【0021】
ナビゲーション装置30は、車両3の走行時には一般的なナビゲーション装置と同様に、測位用の人工衛星からの測位信号に基づいて自車の位置を検出してディスプレイ画面のデジタル地図上に表示し、目的地までの道案内を行うものである。また、ナビゲーション装置30は、車両3に搭載され、近距離無線通信装置20から送信される輸送機器位置の情報を受信し、車両3の現在位置をその輸送機器位置の情報が示す位置に補正するものである。
【0022】
なお、輸送機器2は、車両3を輸送するものである。輸送機器としては、例えばレッカー車、搬送車、および列車などの車両、フェリーなどの船舶、ならびに輸送機などの航空機がある。
【0023】
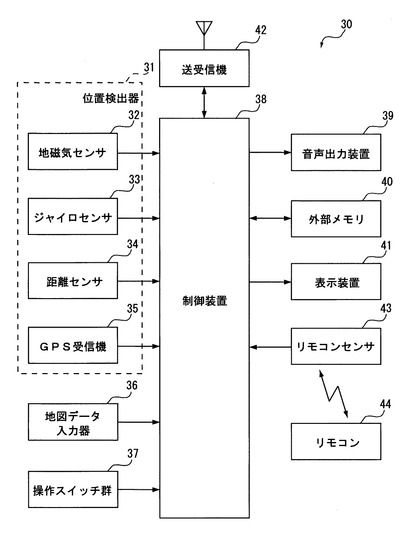
次に、図2を用いて、ナビゲーション装置30の概略的な構成について説明を行う。図2は、ナビゲーション装置30の全体構成を示すブロック図である。図2に示すようにナビゲーション装置30は、位置検出器31、地図データ入力器36、操作スイッチ群37、音声出力装置39、外部メモリ40、表示装置41、送受信機42、リモコンセンサ43、リモートコントロール端末(以下リモコンと称する)44、およびこれらと接続された制御装置38を備えている。
【0024】
位置検出器31は、地磁気を検出する地磁気センサ32、自車両の鉛直方向周りの角速度を検出するジャイロセンサ33、自車両の移動距離を検出する距離センサ34、および衛星からの電波に基づいて車両の現在位置を検出するGPSのためのGPS受信機35を有している。これらのセンサ等32〜35は、各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。なお、各センサの精度によっては位置検出器31を上述した内の一部で構成してもよく、さらに、図示しないステアリングの回転センサ、各転動輪の回転速度から速度を検出する車速センサ等を用いてもよい。
【0025】
地図データ入力器36は、記憶媒体(図示せず)が装着され、その記憶媒体に格納されている位置検出の精度向上のためのいわゆるマップマッチング用データ、地図データ、および目印データを含む各種データを入力するための装置である。地図データには、道路を示すリンクデータとノードデータとが含まれる。なお、リンクとは、地図上の各道路を交差・分岐・合流する点等の複数のノードにて分割したときのノード間を結ぶものであり、各リンクを接続することにより道路が構成される。リンクデータは、リンクを特定する固有番号(リンクID)、リンクの長さを示すリンク長、リンクの始端及び終端ノード座標(緯度・経度)、道路名称、道路種別、道路幅員、車線数、右折・左折専用車線の有無とその専用車線の数、および制限速度等の各データから構成される。
【0026】
一方、ノードデータは、地図上の各道路が交差、合流、分岐するノード毎に固有の番号を付したノードID、ノード座標、ノード名称、ノードに接続するリンクのリンクIDが記述される接続リンクID、および交差点種類等の各データから構成される。
【0027】
また、上記記憶媒体には、各種施設の種類、名称、住所のデータなども記憶されており、それらのデータは経路探索の際の目的地設定などに用いられる。なお、上記記憶媒体としては、CD−ROMまたはDVD−ROM、メモリカード、HDD等が用いられる。
【0028】
操作スイッチ群37は、例えば表示装置41と一体になったタッチスイッチもしくはメカニカルなスイッチ等が用いられ、スイッチ操作により制御装置38へ各種機能(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等)の操作指示を行う。また、操作スイッチ群37は、出発地および目的地を設定するためのスイッチを含んでいる。そのスイッチを操作することによって、ユーザは、予め登録しておいた地点、施設名、電話番号、住所などから、出発地および目的地を設定することができる。
【0029】
リモコン44には複数の操作スイッチ(図示せず)が設けられ、スイッチ操作によりリモコンセンサ43を介して各種指令信号を制御装置38に入力することにより、操作スイッチ群37と同じ機能を制御装置38に対して実行させることが可能である。
【0030】
音声出力装置39は、スピーカ等から構成され、制御装置38の指示に基づいて、経路案内時の案内音声などを出力する。
【0031】
外部メモリ40は、書き込み可能なHDD等の大容量記憶装置である。外部メモリ40には大量のデータや電源をOFFしても消去してはいけないデータを記憶したり、頻繁に使用するデータを地図データ入力器36からコピーして利用したりする等の用途がある。また、外部メモリ40は、位置検出器31で検出された車両3の現在位置の情報のうち、最新の検出結果を記憶している。さらに、外部メモリ40は、位置検出器31で検出された車両3の向いている方角の情報のうち、最新の検出結果を記憶している。なお、外部メモリ40は、比較的記憶容量の小さいリムーバブルなメモリであってもよい。
【0032】
表示装置41は、車両の走行を案内するための地図および目的地選択画面等を表示するものであって、フルカラー表示が可能なものであり、液晶ディスプレイ、有機ELディスプレイ、プラズマディスプレイ等を用いて構成することができる。
【0033】
送受信機42は、DSRC方式の送受信機である。従って、輸送機器2に備えられているDSRC方式の近距離無線通信装置20から送信される輸送機器位置の情報を受信することができるので、請求項の無線受信機として機能する。
【0034】
制御装置38は通常のコンピュータとして構成されており、内部には周知のCPU、ROM、RAM、I/O及びこれらの構成を接続するバスライン(いずれも図示せず)が備えられている。制御装置38は、位置検出器31、地図データ入力器36、操作スイッチ群37、外部メモリ40、リモコンセンサ43から入力された各種情報に基づき、ナビゲーション機能としての処理(例えば、地図縮尺変更処理、メニュー表示選択処理、目的地設定処理、経路探索実行処理、経路案内開始処理、現在位置修正処理、表示画面変更処理、音量調整処理等)を実行する。
【0035】
また、制御装置38は、ナビゲーション装置30が再起動されたことを検知した場合、送受信機42から前述の確認信号を送信させる。そして、その確認信号に応答して確認応答が返信された場合に、輸送機器位置の情報の受信を送受信機42で行わせる。また、制御装置38は、送受信機42で受信した輸送機器位置の情報を用いて、車両3の現在位置をその輸送機器位置の情報が示す位置に補正する。つまり、外部メモリ40に記憶されている車両3の現在位置の情報を、その輸送機器位置の情報に置き換えて記憶する。よって、制御装置38は、請求項の現在位置補正手段として機能する。
【0036】
次に、図3を用いて車両測位システム1での動作フローについて説明を行う。図3は、車両測位システム1での動作フローを示すフローチャートである。本フローは、ナビゲーション装置30の再起動時に開始される。
【0037】
まず、ステップS1では、確認信号を送受信機42から送信して、近距離無線通信装置20から確認応答を受信したか否かを判定する。つまり、輸送機器2の近距離無線通信装置20から輸送機器位置の情報を入手可能な状態であるか否かの判定を行う。そして、近距離無線通信装置20から輸送機器位置の情報を入手可能であると判定された場合(ステップS1でYes)には、ステップS2に移る。また、近距離無線通信装置20から輸送機器位置の情報を入手可能でないと判定された場合(ステップS1でNo)には、ステップS3に移る。
【0038】
ステップS2では、近距離無線通信装置20から送信される輸送機器位置の情報を送受信機42で受信して制御装置38に送り、ステップS6に移る。
【0039】
また、ステップS3では、車両3のGPS受信機35が、GPS衛星からの測位信号を受信可能な状態であった場合(ステップS3でYes)には、ステップS4に移る。また、車両3のGPS受信機35が、GPS衛星からの測位信号を受信可能な状態でなかった場合(ステップS3でNo)には、ステップS5に移る。
【0040】
ステップS4では、GPS衛星からの測位信号に基づいてGPS受信機35で車両3の現在位置を検出し、その検出した車両3の現在位置の情報(以降では、更新用現在位置情報と呼ぶ)を制御装置38に送り、ステップS6に移る。また、ステップS5では、一定時間をおいて(ウェイトして)ステップS1に戻り、フローを繰り返す。なお、ここで言うところの一定時間とは任意に設定可能なものであり、例えば数秒程度でもよい。
【0041】
ステップS6では、送受信機42で受信した輸送機器位置の情報が制御装置38に送られた場合には、外部メモリ40に記憶されている車両3の現在位置の情報を、その輸送機器位置の情報に置き換えて記憶することによって、車両3の現在位置をその輸送機器位置の情報が示す位置に補正する。
【0042】
また、ステップS6では、GPS受信機35で検出した更新用現在位置情報が制御装置38に送られた場合には、外部メモリ40に記憶されている車両3の現在位置の情報を、その更新用現在位置情報に置き換えて記憶することによって、車両3の現在位置をその更新用現在位置情報が示す位置に補正する。
【0043】
以上の構成によれば、ナビゲーション装置30の再起動が行われたことを検知したときに、ナビゲーション装置30が輸送機器位置検出装置10から輸送機器位置の情報を得ることができる。GPS衛星からの測位信号を利用して現在位置の検出を行う装置では、近辺の位置情報を有している場合にはGPS衛星の探索を効率化できるため、GPS衛星からの測位信号に基づいて定期的に現在位置の検出を行っている輸送機器位置検出装置10では、輸送先の位置情報を輸送機器位置の情報としてすぐに得ることができる。よって、ナビゲーション装置30の電源を遮断して輸送機器2によって長距離輸送が行われた車両3について、輸送先でナビゲーション装置30が再起動されたときに、輸送機器位置検出装置10から輸送先の位置情報をすぐに得ることができる。GPS衛星からの測位信号を利用して現在位置の検出を行う装置では、前述したように近辺の位置情報を有している場合にはGPS衛星の探索を効率化できるので、以上の構成によれば、ナビゲーション装置での初期測位時間を短縮することができる。
【0044】
なお、本実施形態では、輸送機器2から車両3へ輸送先の位置情報を送る構成(つまり、近距離無線通信装置20から送受信機42へ輸送先の位置情報を送信する構成)を示したが、必ずしもこれに限らない。例えば、輸送機器2から車両3へ輸送先の位置情報を送るのに加えて、輸送機器2から車両3へ輸送先での車両3の方角の情報を送る構成であってもよい。
【0045】
この場合、輸送先での車両3の方角の情報を送受信機42へ送信する輸送方角情報送信機を、輸送機器2が輸送機器位置検出装置10に加えて備える構成となる。輸送先での車両3の向きは、輸送機器2に設けられている出入り口を通過するときは常に定まった向きとなるので、輸送先での輸送機器2の向く方角が予め定まっている場合は、輸送先で輸送機器2に設けられている出入り口を通過するときの車両3の方角が予め定まる。よって、その予め定まっている車両3の方角の情報を前述の輸送方角情報送信機に記憶させておいて、車両3の通過を検知したら輸送方角情報送信機から車両3の方角の情報を近距離無線通信装置20から送受信機42に送信させるようにすればよい。
【0046】
また、輸送先での輸送機器2の向く方角が予め定まっていない場合には、輸送機器2に備えられている地磁気センサから得られる情報によって輸送機器2の向いている方角を検出し、その検出した方角と前述の定まった向きの情報とに基づいて輸送先での車両3の方角を求めて、車両3の通過を検知したら輸送方角情報送信機から車両3の方角の情報を近距離無線通信装置20から送受信機42に送信させるようにすればよい。
【0047】
以上の構成によれば、車両3が実際に向いている正確な方角の情報を車両3に送ることができるので、車両3の向いている方角をナビゲーション装置30で新たに算出し直す手間を省くことができる。
【0048】
また、近距離無線通信装置20からの輸送機器位置の情報および車両方角情報の送信は、定期的に行われるものであってもよい。
【0049】
なお、本実施形態では、車両3のナビゲーション装置30が電源の遮断後に再起動されたことを制御装置38で検知したときに、送受信機42によって受信された輸送機器位置の情報を用いて制御装置38が現在位置を補正する構成を示したが、必ずしもこれに限らない。例えば、ユーザの操作によってナビゲーション装置30の電源が遮断されている期間に、定期的に送受信機42を起動させ、送受信機42によって輸送機器位置の情報が受信されたことに基づいて、制御装置38が現在位置をその輸送機器位置の情報が示す位置に補正する構成であってもよい。なお、ユーザの操作によるナビゲーション装置30の電源の遮断は、ユーザによって車両3のイグニッションがオフされることに連動して生じるものであってもよいし、操作スイッチ群37またはリモコン44を介してナビゲーション装置30の電源がオフされることによって生じるものであってもよい。
【0050】
これによれば、ナビゲーション装置30が、輸送機器位置の情報を、輸送機器位置検出装置10から定期的に得ることができる。よって、輸送機器位置の情報や車両3の現在位置の情報を輸送中に得られない場合に比べ、輸送先に到着したときに、輸送先により近い場所の位置情報をナビゲーション装置30がすぐに得ることが可能になる。従って、ナビゲーション装置30での初期測位時間を短縮することができる。
【0051】
また、本実施形態では、輸送機器位置検出装置10がGPS衛星からの測位信号に基づいて輸送機器位置を検出する構成を示したが、必ずしもこれに限らない。例えば、準天頂衛星等の他の測位用の人工衛星からの測位信号に基づいて輸送機器位置を検出する構成であってもよい。また、推測航法による現在位置の検出、および路上ビーコンやサインポスト等からの現在位置の情報の取得など、測位用の人工衛星からの測位信号に基づかない方法によって輸送機器位置を検出する構成であってもよい。
【0052】
さらに、本実施形態では、輸送機器位置検出装置10で検出された輸送機器位置の情報を、輸送先でナビゲーション装置30が受け取り、その輸送機器位置の情報を用いて現在位置を補正する構成を示したが、輸送先に現在位置の情報を提供する装置を設置しておいて、その装置から現在位置の情報をナビゲーション装置30が受け取り、その現在位置の情報を用いて現在位置を補正する構成であってもよい。なお、輸送先に設置された装置から現在位置の情報をナビゲーション装置30が受け取る場合には、DSRCの代わりに、例えばVICS(登録商標)(Vehicle Information andCommunication System)を利用する構成であってもよい。
【0053】
なお、本実施形態では、近距離無線通信装置20が輸送機器位置の情報をDSRCによって送信する構成を示したが、必ずしもこれに限らず、近距離無線通信装置20が輸送機器位置の情報を他の無線通信の方式によって送信する構成であってもよい。例えば、近距離無線通信装置20が輸送機器位置の情報をIEEE802.11pなどの無線LANによって送信する構成であってもよい。
【0054】
また、本実施形態では、位置検出器31で検出された車両3の現在位置の情報を外部メモリ40に記憶しておく構成を示したが、必ずしもこれに限らず、位置検出器31で検出された車両3の現在位置の情報を外部メモリ40以外の書き込み可能なメモリに記憶しておく構成であってもよい。
【0055】
なお、本発明は、上述した各実施形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能であり、異なる実施形態にそれぞれ開示された技術的手段を適宜組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
【図面の簡単な説明】
【0056】
【図1】車両測位システム1の概略的な構成を示すブロック図である。
【図2】ナビゲーション装置30の全体構成を示すブロック図である。
【図3】車両測位システム1での動作フローを示すフローチャートである。
【符号の説明】
【0057】
1 車両測位システム、2 輸送機器、3 車両、10 輸送機器位置検出装置(現在位置検出装置)、20 近距離無線通信装置(近距離無線送信装置)、30 ナビゲーション装置、38 制御装置(検知手段、現在位置補正手段)、42 送受信機(無線受信機)
【技術分野】
【0001】
本発明は、初期測位に要する時間を短縮する車両測位システムおよびナビゲーション装置に関するものである。
【背景技術】
【0002】
従来から、GPS(Global Positioning System)衛星からの信号電波を受信することによって車両などの現在位置を検出し、得られた現在位置の情報を操縦者に提示するナビゲーション装置が知られている。
【0003】
また、このようなナビゲーション装置を搭載した車両を、ナビゲーション装置の電源をOFFにして他の車両・船舶等によって輸送した後に、ナビゲーション装置の電源をONにして初期測位を開始しようとした場合、初期測位に要する時間(初期測位時間)が、かなりかかることが知られている。特に、日本から米国・欧州等へ輸送を行う場合のように、長距離、長時間の輸送の場合には、初期測位時間が数十分かかる問題があることが知られている。なお、電源の遮断前と遮断後の再起動時とで測位位置が大きく異なる場合では、GPS衛星の探索を効率化させるのに必要な現在位置近辺の位置情報が上述の再起動時のナビゲーション装置には記憶されていないため、GPS衛星の捕捉に時間がかかり、この問題が生じる。
【0004】
そこで、この問題を解決する手段として、例えば、特許文献1には、GPS受信機を備えた携帯端末から位置情報を受信し、その位置情報に基づいて、探索可能なGPS衛星の選択を行うことによって、ナビゲーション装置での初期測位時間を短縮する測位システムが開示されている。
【0005】
他にも、初期測位時間を短縮する技術として、例えば特許文献2には、準天頂衛星を利用した測位システムにおいて、複数の準天頂衛星のうちの一部をサーチした後にGPS衛星などの非準天頂衛星のサーチを行うことによって準天頂衛星サーチの時間を短縮し、ナビゲーション装置での初期測位時間を短縮する衛星電波受信機が開示されている。
【特許文献1】特開2005−214757号公報
【特許文献2】特開2006−317225号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示の測位システムでは、ナビゲーション装置での初期測位時間を短縮するためには携帯端末が必須となるため、携帯端末の使用できないエリアでは使用できず不便であるという問題点を有している。
【0007】
また、特許文献2に開示の衛星電波受信機では、GPS衛星と準天頂衛星とを利用する測位システムに用いられるナビゲーション装置での初期測位時間を短縮することしかできない。すなわち、準天頂衛星を利用しない測位システムに用いられるナビゲーション装置での初期測位時間は短縮することができず、汎用性が低いという問題点を有している。
【0008】
本発明は、上記従来の問題点に鑑みなされたものであって、その目的は、より高い利便性、且つ、より高い汎用性を有しながら、初期測位時間を短縮することが可能な車両測位システムおよびナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0009】
請求項1の車両測位システムは、上記課題を解決するために、車両に搭載されて、測位用の人工衛星からの測位信号に基づいて現在位置を検出するナビゲーション装置を備えた車両測位システムであって、前記車両を輸送する輸送機器に搭載され、その輸送機器の現在位置を検出する現在位置検出装置と、前記輸送機器に搭載され、前記現在位置検出装置によって検出された現在位置の情報である現在位置情報を送信する近距離無線送信装置と、を含むとともに、前記ナビゲーション装置は、前記輸送機器に搭載されている近距離無線送信装置からの前記現在位置情報を受信する無線受信機と、その無線受信機によって前記現在位置情報が受信されたことに基づいて、現在位置をその現在位置情報が示す位置に補正する現在位置補正手段と、を含むことを特徴としている。
【0010】
これによれば、車両側のナビゲーション装置が、輸送機器側の現在位置検出装置から、輸送機器の現在位置の情報である現在位置情報を得て、現在位置をその現在位置情報が示す位置に補正することができる。よって、ナビゲーション装置の電源を遮断して長距離輸送が行われた車両について、輸送先で現在位置情報を輸送機器に搭載された現在位置検出装置から得れば、輸送先の位置情報を得ることができる。ナビゲーション装置では、現在位置近辺の位置情報を有している場合にはGPS衛星の探索を効率化できるので、請求項1によれば、ナビゲーション装置での初期測位時間を短縮することが可能になる。
【0011】
また、請求項1によれば、ナビゲーション装置が、近距離無線送信装置から送信される現在位置情報を、無線受信機によって受信することができるので、GPS受信機を備えた携帯端末から現在位置情報を得る場合のように、携帯端末の使用できないエリアでは位置情報が得られなくなるという不便利が生じない。
【0012】
さらに、請求項1によれば、輸送機器側の現在位置検出装置で既に得られている現在位置情報をナビゲーション装置が得て、現在位置をその現在位置情報が示す位置に補正することができるので、測位用の人工衛星の種類によらずに、ナビゲーション装置での初期測位時間を短縮することができる。
【0013】
また、請求項2の車両測位システムでは、前記現在位置補正手段は、前記ナビゲーション装置が再起動されたときに前記無線受信機によって受信された現在位置情報を用いて現在位置を補正することを特徴としている。
【0014】
これによれば、再起動時に現在位置情報を得ることができるようになるので、ユーザにとって使い勝手が向上する。
【0015】
また、請求項3の車両測位システムでは、前記現在位置補正手段は、ユーザの操作によって前記ナビゲーション装置の電源が遮断されている期間に、定期的に前記無線受信機を起動させ、無線受信機によって前記現在位置情報が受信されたことに基づいて、現在位置をその現在位置情報が示す位置に補正することを特徴としている。
【0016】
これによれば、再起動させられる前に現在位置情報を得ることができるようになるので、ユーザにとって使い勝手が向上する。
【0017】
また、請求項4のナビゲーション装置は、上記課題を解決するために、車両に搭載されて、測位用の人工衛星からの測位信号に基づいて現在位置を検出するナビゲーション装置であって、車両を輸送する輸送機器に搭載された近距離無線送信装置から、その輸送機器の現在位置を示す現在位置情報を受信する無線受信機と、その無線受信機によって前記現在位置情報が受信されたことに基づいて、現在位置をその現在位置情報が示す位置に補正する現在位置補正手段と、を備えることを特徴としている。
【発明を実施するための最良の形態】
【0018】
以下、本発明の実施形態について図面を用いて説明する。図1は、車両測位システム1の概略的な構成を示すブロック図である。図1に示す車両測位システム1は、輸送機器位置検出装置10、近距離無線通信装置20、およびナビゲーション装置30を含んでいる。
【0019】
まず、輸送機器位置検出装置10は、輸送機器2に搭載され、GPS衛星からの測位信号に基づいて輸送機器2の現在位置(以降では、輸送機器位置と呼ぶ)を検出するものである。よって、輸送機器位置検出装置10は、請求項の現在位置検出装置として機能する。なお、輸送機器位置検出装置10では、起動中は定期的に現在位置の検出を行う。ここで言うところの定期的とは、例えば数秒〜数分ごとである。
【0020】
近距離無線通信装置20は、輸送機器2に搭載され、輸送機器位置検出装置10で検出された輸送機器位置の情報(請求項の現在位置情報に対応)をDSRC(Dedicated Short RangeCommunication)によって送信するものである。よって、近距離無線通信装置20は、請求項の近距離無線送信装置として機能する。なお、近距離無線通信装置20の送信範囲は数メートル〜数百メートルである。
【0021】
ナビゲーション装置30は、車両3の走行時には一般的なナビゲーション装置と同様に、測位用の人工衛星からの測位信号に基づいて自車の位置を検出してディスプレイ画面のデジタル地図上に表示し、目的地までの道案内を行うものである。また、ナビゲーション装置30は、車両3に搭載され、近距離無線通信装置20から送信される輸送機器位置の情報を受信し、車両3の現在位置をその輸送機器位置の情報が示す位置に補正するものである。
【0022】
なお、輸送機器2は、車両3を輸送するものである。輸送機器としては、例えばレッカー車、搬送車、および列車などの車両、フェリーなどの船舶、ならびに輸送機などの航空機がある。
【0023】
次に、図2を用いて、ナビゲーション装置30の概略的な構成について説明を行う。図2は、ナビゲーション装置30の全体構成を示すブロック図である。図2に示すようにナビゲーション装置30は、位置検出器31、地図データ入力器36、操作スイッチ群37、音声出力装置39、外部メモリ40、表示装置41、送受信機42、リモコンセンサ43、リモートコントロール端末(以下リモコンと称する)44、およびこれらと接続された制御装置38を備えている。
【0024】
位置検出器31は、地磁気を検出する地磁気センサ32、自車両の鉛直方向周りの角速度を検出するジャイロセンサ33、自車両の移動距離を検出する距離センサ34、および衛星からの電波に基づいて車両の現在位置を検出するGPSのためのGPS受信機35を有している。これらのセンサ等32〜35は、各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。なお、各センサの精度によっては位置検出器31を上述した内の一部で構成してもよく、さらに、図示しないステアリングの回転センサ、各転動輪の回転速度から速度を検出する車速センサ等を用いてもよい。
【0025】
地図データ入力器36は、記憶媒体(図示せず)が装着され、その記憶媒体に格納されている位置検出の精度向上のためのいわゆるマップマッチング用データ、地図データ、および目印データを含む各種データを入力するための装置である。地図データには、道路を示すリンクデータとノードデータとが含まれる。なお、リンクとは、地図上の各道路を交差・分岐・合流する点等の複数のノードにて分割したときのノード間を結ぶものであり、各リンクを接続することにより道路が構成される。リンクデータは、リンクを特定する固有番号(リンクID)、リンクの長さを示すリンク長、リンクの始端及び終端ノード座標(緯度・経度)、道路名称、道路種別、道路幅員、車線数、右折・左折専用車線の有無とその専用車線の数、および制限速度等の各データから構成される。
【0026】
一方、ノードデータは、地図上の各道路が交差、合流、分岐するノード毎に固有の番号を付したノードID、ノード座標、ノード名称、ノードに接続するリンクのリンクIDが記述される接続リンクID、および交差点種類等の各データから構成される。
【0027】
また、上記記憶媒体には、各種施設の種類、名称、住所のデータなども記憶されており、それらのデータは経路探索の際の目的地設定などに用いられる。なお、上記記憶媒体としては、CD−ROMまたはDVD−ROM、メモリカード、HDD等が用いられる。
【0028】
操作スイッチ群37は、例えば表示装置41と一体になったタッチスイッチもしくはメカニカルなスイッチ等が用いられ、スイッチ操作により制御装置38へ各種機能(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等)の操作指示を行う。また、操作スイッチ群37は、出発地および目的地を設定するためのスイッチを含んでいる。そのスイッチを操作することによって、ユーザは、予め登録しておいた地点、施設名、電話番号、住所などから、出発地および目的地を設定することができる。
【0029】
リモコン44には複数の操作スイッチ(図示せず)が設けられ、スイッチ操作によりリモコンセンサ43を介して各種指令信号を制御装置38に入力することにより、操作スイッチ群37と同じ機能を制御装置38に対して実行させることが可能である。
【0030】
音声出力装置39は、スピーカ等から構成され、制御装置38の指示に基づいて、経路案内時の案内音声などを出力する。
【0031】
外部メモリ40は、書き込み可能なHDD等の大容量記憶装置である。外部メモリ40には大量のデータや電源をOFFしても消去してはいけないデータを記憶したり、頻繁に使用するデータを地図データ入力器36からコピーして利用したりする等の用途がある。また、外部メモリ40は、位置検出器31で検出された車両3の現在位置の情報のうち、最新の検出結果を記憶している。さらに、外部メモリ40は、位置検出器31で検出された車両3の向いている方角の情報のうち、最新の検出結果を記憶している。なお、外部メモリ40は、比較的記憶容量の小さいリムーバブルなメモリであってもよい。
【0032】
表示装置41は、車両の走行を案内するための地図および目的地選択画面等を表示するものであって、フルカラー表示が可能なものであり、液晶ディスプレイ、有機ELディスプレイ、プラズマディスプレイ等を用いて構成することができる。
【0033】
送受信機42は、DSRC方式の送受信機である。従って、輸送機器2に備えられているDSRC方式の近距離無線通信装置20から送信される輸送機器位置の情報を受信することができるので、請求項の無線受信機として機能する。
【0034】
制御装置38は通常のコンピュータとして構成されており、内部には周知のCPU、ROM、RAM、I/O及びこれらの構成を接続するバスライン(いずれも図示せず)が備えられている。制御装置38は、位置検出器31、地図データ入力器36、操作スイッチ群37、外部メモリ40、リモコンセンサ43から入力された各種情報に基づき、ナビゲーション機能としての処理(例えば、地図縮尺変更処理、メニュー表示選択処理、目的地設定処理、経路探索実行処理、経路案内開始処理、現在位置修正処理、表示画面変更処理、音量調整処理等)を実行する。
【0035】
また、制御装置38は、ナビゲーション装置30が再起動されたことを検知した場合、送受信機42から前述の確認信号を送信させる。そして、その確認信号に応答して確認応答が返信された場合に、輸送機器位置の情報の受信を送受信機42で行わせる。また、制御装置38は、送受信機42で受信した輸送機器位置の情報を用いて、車両3の現在位置をその輸送機器位置の情報が示す位置に補正する。つまり、外部メモリ40に記憶されている車両3の現在位置の情報を、その輸送機器位置の情報に置き換えて記憶する。よって、制御装置38は、請求項の現在位置補正手段として機能する。
【0036】
次に、図3を用いて車両測位システム1での動作フローについて説明を行う。図3は、車両測位システム1での動作フローを示すフローチャートである。本フローは、ナビゲーション装置30の再起動時に開始される。
【0037】
まず、ステップS1では、確認信号を送受信機42から送信して、近距離無線通信装置20から確認応答を受信したか否かを判定する。つまり、輸送機器2の近距離無線通信装置20から輸送機器位置の情報を入手可能な状態であるか否かの判定を行う。そして、近距離無線通信装置20から輸送機器位置の情報を入手可能であると判定された場合(ステップS1でYes)には、ステップS2に移る。また、近距離無線通信装置20から輸送機器位置の情報を入手可能でないと判定された場合(ステップS1でNo)には、ステップS3に移る。
【0038】
ステップS2では、近距離無線通信装置20から送信される輸送機器位置の情報を送受信機42で受信して制御装置38に送り、ステップS6に移る。
【0039】
また、ステップS3では、車両3のGPS受信機35が、GPS衛星からの測位信号を受信可能な状態であった場合(ステップS3でYes)には、ステップS4に移る。また、車両3のGPS受信機35が、GPS衛星からの測位信号を受信可能な状態でなかった場合(ステップS3でNo)には、ステップS5に移る。
【0040】
ステップS4では、GPS衛星からの測位信号に基づいてGPS受信機35で車両3の現在位置を検出し、その検出した車両3の現在位置の情報(以降では、更新用現在位置情報と呼ぶ)を制御装置38に送り、ステップS6に移る。また、ステップS5では、一定時間をおいて(ウェイトして)ステップS1に戻り、フローを繰り返す。なお、ここで言うところの一定時間とは任意に設定可能なものであり、例えば数秒程度でもよい。
【0041】
ステップS6では、送受信機42で受信した輸送機器位置の情報が制御装置38に送られた場合には、外部メモリ40に記憶されている車両3の現在位置の情報を、その輸送機器位置の情報に置き換えて記憶することによって、車両3の現在位置をその輸送機器位置の情報が示す位置に補正する。
【0042】
また、ステップS6では、GPS受信機35で検出した更新用現在位置情報が制御装置38に送られた場合には、外部メモリ40に記憶されている車両3の現在位置の情報を、その更新用現在位置情報に置き換えて記憶することによって、車両3の現在位置をその更新用現在位置情報が示す位置に補正する。
【0043】
以上の構成によれば、ナビゲーション装置30の再起動が行われたことを検知したときに、ナビゲーション装置30が輸送機器位置検出装置10から輸送機器位置の情報を得ることができる。GPS衛星からの測位信号を利用して現在位置の検出を行う装置では、近辺の位置情報を有している場合にはGPS衛星の探索を効率化できるため、GPS衛星からの測位信号に基づいて定期的に現在位置の検出を行っている輸送機器位置検出装置10では、輸送先の位置情報を輸送機器位置の情報としてすぐに得ることができる。よって、ナビゲーション装置30の電源を遮断して輸送機器2によって長距離輸送が行われた車両3について、輸送先でナビゲーション装置30が再起動されたときに、輸送機器位置検出装置10から輸送先の位置情報をすぐに得ることができる。GPS衛星からの測位信号を利用して現在位置の検出を行う装置では、前述したように近辺の位置情報を有している場合にはGPS衛星の探索を効率化できるので、以上の構成によれば、ナビゲーション装置での初期測位時間を短縮することができる。
【0044】
なお、本実施形態では、輸送機器2から車両3へ輸送先の位置情報を送る構成(つまり、近距離無線通信装置20から送受信機42へ輸送先の位置情報を送信する構成)を示したが、必ずしもこれに限らない。例えば、輸送機器2から車両3へ輸送先の位置情報を送るのに加えて、輸送機器2から車両3へ輸送先での車両3の方角の情報を送る構成であってもよい。
【0045】
この場合、輸送先での車両3の方角の情報を送受信機42へ送信する輸送方角情報送信機を、輸送機器2が輸送機器位置検出装置10に加えて備える構成となる。輸送先での車両3の向きは、輸送機器2に設けられている出入り口を通過するときは常に定まった向きとなるので、輸送先での輸送機器2の向く方角が予め定まっている場合は、輸送先で輸送機器2に設けられている出入り口を通過するときの車両3の方角が予め定まる。よって、その予め定まっている車両3の方角の情報を前述の輸送方角情報送信機に記憶させておいて、車両3の通過を検知したら輸送方角情報送信機から車両3の方角の情報を近距離無線通信装置20から送受信機42に送信させるようにすればよい。
【0046】
また、輸送先での輸送機器2の向く方角が予め定まっていない場合には、輸送機器2に備えられている地磁気センサから得られる情報によって輸送機器2の向いている方角を検出し、その検出した方角と前述の定まった向きの情報とに基づいて輸送先での車両3の方角を求めて、車両3の通過を検知したら輸送方角情報送信機から車両3の方角の情報を近距離無線通信装置20から送受信機42に送信させるようにすればよい。
【0047】
以上の構成によれば、車両3が実際に向いている正確な方角の情報を車両3に送ることができるので、車両3の向いている方角をナビゲーション装置30で新たに算出し直す手間を省くことができる。
【0048】
また、近距離無線通信装置20からの輸送機器位置の情報および車両方角情報の送信は、定期的に行われるものであってもよい。
【0049】
なお、本実施形態では、車両3のナビゲーション装置30が電源の遮断後に再起動されたことを制御装置38で検知したときに、送受信機42によって受信された輸送機器位置の情報を用いて制御装置38が現在位置を補正する構成を示したが、必ずしもこれに限らない。例えば、ユーザの操作によってナビゲーション装置30の電源が遮断されている期間に、定期的に送受信機42を起動させ、送受信機42によって輸送機器位置の情報が受信されたことに基づいて、制御装置38が現在位置をその輸送機器位置の情報が示す位置に補正する構成であってもよい。なお、ユーザの操作によるナビゲーション装置30の電源の遮断は、ユーザによって車両3のイグニッションがオフされることに連動して生じるものであってもよいし、操作スイッチ群37またはリモコン44を介してナビゲーション装置30の電源がオフされることによって生じるものであってもよい。
【0050】
これによれば、ナビゲーション装置30が、輸送機器位置の情報を、輸送機器位置検出装置10から定期的に得ることができる。よって、輸送機器位置の情報や車両3の現在位置の情報を輸送中に得られない場合に比べ、輸送先に到着したときに、輸送先により近い場所の位置情報をナビゲーション装置30がすぐに得ることが可能になる。従って、ナビゲーション装置30での初期測位時間を短縮することができる。
【0051】
また、本実施形態では、輸送機器位置検出装置10がGPS衛星からの測位信号に基づいて輸送機器位置を検出する構成を示したが、必ずしもこれに限らない。例えば、準天頂衛星等の他の測位用の人工衛星からの測位信号に基づいて輸送機器位置を検出する構成であってもよい。また、推測航法による現在位置の検出、および路上ビーコンやサインポスト等からの現在位置の情報の取得など、測位用の人工衛星からの測位信号に基づかない方法によって輸送機器位置を検出する構成であってもよい。
【0052】
さらに、本実施形態では、輸送機器位置検出装置10で検出された輸送機器位置の情報を、輸送先でナビゲーション装置30が受け取り、その輸送機器位置の情報を用いて現在位置を補正する構成を示したが、輸送先に現在位置の情報を提供する装置を設置しておいて、その装置から現在位置の情報をナビゲーション装置30が受け取り、その現在位置の情報を用いて現在位置を補正する構成であってもよい。なお、輸送先に設置された装置から現在位置の情報をナビゲーション装置30が受け取る場合には、DSRCの代わりに、例えばVICS(登録商標)(Vehicle Information andCommunication System)を利用する構成であってもよい。
【0053】
なお、本実施形態では、近距離無線通信装置20が輸送機器位置の情報をDSRCによって送信する構成を示したが、必ずしもこれに限らず、近距離無線通信装置20が輸送機器位置の情報を他の無線通信の方式によって送信する構成であってもよい。例えば、近距離無線通信装置20が輸送機器位置の情報をIEEE802.11pなどの無線LANによって送信する構成であってもよい。
【0054】
また、本実施形態では、位置検出器31で検出された車両3の現在位置の情報を外部メモリ40に記憶しておく構成を示したが、必ずしもこれに限らず、位置検出器31で検出された車両3の現在位置の情報を外部メモリ40以外の書き込み可能なメモリに記憶しておく構成であってもよい。
【0055】
なお、本発明は、上述した各実施形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能であり、異なる実施形態にそれぞれ開示された技術的手段を適宜組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
【図面の簡単な説明】
【0056】
【図1】車両測位システム1の概略的な構成を示すブロック図である。
【図2】ナビゲーション装置30の全体構成を示すブロック図である。
【図3】車両測位システム1での動作フローを示すフローチャートである。
【符号の説明】
【0057】
1 車両測位システム、2 輸送機器、3 車両、10 輸送機器位置検出装置(現在位置検出装置)、20 近距離無線通信装置(近距離無線送信装置)、30 ナビゲーション装置、38 制御装置(検知手段、現在位置補正手段)、42 送受信機(無線受信機)
【特許請求の範囲】
【請求項1】
車両に搭載されて、測位用の人工衛星からの測位信号に基づいて現在位置を検出するナビゲーション装置を備えた車両測位システムであって、
前記車両を輸送する輸送機器に搭載され、その輸送機器の現在位置を検出する現在位置検出装置と、
前記輸送機器に搭載され、前記現在位置検出装置によって検出された現在位置の情報である現在位置情報を送信する近距離無線送信装置と、を含むとともに、
前記ナビゲーション装置は、
前記輸送機器に搭載されている近距離無線送信装置からの前記現在位置情報を受信する無線受信機と、
その無線受信機によって前記現在位置情報が受信されたことに基づいて、現在位置をその現在位置情報が示す位置に補正する現在位置補正手段と、を含むことを特徴とする車両測位システム。
【請求項2】
前記現在位置補正手段は、前記ナビゲーション装置が再起動されたときに前記無線受信機によって受信された現在位置情報を用いて現在位置を補正することを特徴とする請求項1に記載の車両測位システム。
【請求項3】
前記現在位置補正手段は、ユーザの操作によって前記ナビゲーション装置の電源が遮断されている期間に、定期的に前記無線受信機を起動させ、無線受信機によって前記現在位置情報が受信されたことに基づいて、現在位置をその現在位置情報が示す位置に補正することを特徴とする請求項1に記載の車両測位システム。
【請求項4】
車両に搭載されて、測位用の人工衛星からの測位信号に基づいて現在位置を検出するナビゲーション装置であって、
車両を輸送する輸送機器に搭載された近距離無線送信装置から、その輸送機器の現在位置を示す現在位置情報を受信する無線受信機と、
その無線受信機によって前記現在位置情報が受信されたことに基づいて、現在位置をその現在位置情報が示す位置に補正する現在位置補正手段と、を備えることを特徴とするナビゲーション装置。
【請求項1】
車両に搭載されて、測位用の人工衛星からの測位信号に基づいて現在位置を検出するナビゲーション装置を備えた車両測位システムであって、
前記車両を輸送する輸送機器に搭載され、その輸送機器の現在位置を検出する現在位置検出装置と、
前記輸送機器に搭載され、前記現在位置検出装置によって検出された現在位置の情報である現在位置情報を送信する近距離無線送信装置と、を含むとともに、
前記ナビゲーション装置は、
前記輸送機器に搭載されている近距離無線送信装置からの前記現在位置情報を受信する無線受信機と、
その無線受信機によって前記現在位置情報が受信されたことに基づいて、現在位置をその現在位置情報が示す位置に補正する現在位置補正手段と、を含むことを特徴とする車両測位システム。
【請求項2】
前記現在位置補正手段は、前記ナビゲーション装置が再起動されたときに前記無線受信機によって受信された現在位置情報を用いて現在位置を補正することを特徴とする請求項1に記載の車両測位システム。
【請求項3】
前記現在位置補正手段は、ユーザの操作によって前記ナビゲーション装置の電源が遮断されている期間に、定期的に前記無線受信機を起動させ、無線受信機によって前記現在位置情報が受信されたことに基づいて、現在位置をその現在位置情報が示す位置に補正することを特徴とする請求項1に記載の車両測位システム。
【請求項4】
車両に搭載されて、測位用の人工衛星からの測位信号に基づいて現在位置を検出するナビゲーション装置であって、
車両を輸送する輸送機器に搭載された近距離無線送信装置から、その輸送機器の現在位置を示す現在位置情報を受信する無線受信機と、
その無線受信機によって前記現在位置情報が受信されたことに基づいて、現在位置をその現在位置情報が示す位置に補正する現在位置補正手段と、を備えることを特徴とするナビゲーション装置。
【図1】


【図2】
【図3】

【図2】
【図3】
【公開番号】特開2009−115712(P2009−115712A)
【公開日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願番号】特願2007−291142(P2007−291142)
【出願日】平成19年11月8日(2007.11.8)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願日】平成19年11月8日(2007.11.8)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]