
車両状態情報表示制御装置および車両状態情報表示制御用のプログラム
【課題】今までにない新規な手法で過去または未来の情報を表示する技術を提供する。
【解決手段】車両用ナビゲーション装置1が、物の回転運動の量を検出し、検出した回転量に基づいて、当該回転量が大きいほど現在時刻より遠い過去または遠い未来の時刻の指定を検出する。そしてこの車両用ナビゲーション装置1は、検出した指定に係る指定時刻と車両の状態との関連を示す時間関連情報を当該車両内の表示装置に表示させる。
【解決手段】車両用ナビゲーション装置1が、物の回転運動の量を検出し、検出した回転量に基づいて、当該回転量が大きいほど現在時刻より遠い過去または遠い未来の時刻の指定を検出する。そしてこの車両用ナビゲーション装置1は、検出した指定に係る指定時刻と車両の状態との関連を示す時間関連情報を当該車両内の表示装置に表示させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両状態情報表示制御装置および車両状態情報表示制御用のプログラムに関する。
【背景技術】
【0002】
従来、車両の未来の予定走行経路、過去の走行経路等、車両の状態に関する過去または未来の情報の表示を行う装置が種々提案されている。例えば、特許文献1および2には、所定時間後の車両の予想走行経路を地図に重畳して表示する技術が開示されている。また、特許文献3には、車両の過去の走行経路および予想経路を地図上に表示すると共に、ボタンの押下に基づいて車両を当該経路に沿って過去または未来に移動させる技術が開示されている。また、特許文献4には、入力された希望到着時刻に合わせて目的地に到着できるように経由地を選択して、当該経由地を経由する目的地への経路を表示する技術が開示されている。また、特許文献5には、所定時間後の予測交通状況を地図に重畳して表示する技術が開示されている。
【特許文献1】特開平7−296148号公報
【特許文献2】特開平11−16094号公報
【特許文献3】特開平11−202759号公報
【特許文献4】特開2000−346667号公報
【特許文献5】特開2005−134429号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
本発明は、今までにない新規な手法で過去または未来の情報を表示する技術を提供することを目的とする。
【課題を解決するための手段】
【0004】
上記目的を達成するための本発明の特徴は、人が移動するとき最も重要視する傾向がある時間に関連させて車両の情報表示を行うことである。
【0005】
請求項1に記載の発明においては、車両状態情報表示制御装置が、物の回転運動の量を検出し、検出した回転量に基づいて、当該回転量が大きいほど現在時刻より遠い過去または遠い未来の時刻の指定を検出する。そしてこの車両状態情報表示制御装置は、検出した指定に係る指定時刻と車両の状態との関連を示す時間関連情報を当該車両内の表示装置に表示させる。
【0006】
このように、車両状態情報表示制御装置が表示させる時間関連情報は、検出した回転運動の量の増大に応じて現在時刻より遠ざかる時刻に関するものとなる。このようにすることで、ユーザは、時計の針を動かすような感覚で、表示のための指定時刻を操作することができる。なお、物は、人の指であってもよいし、回転量検出手段の一部品であってもよい。また、指定時刻と車両状態との関連を示す時間関連情報としては、例えば、現在時刻から指定時刻までの車両の経路中の曲折予定、および、指定時刻における車両の予想到達位置等がある。
【0007】
また、車両状態情報表示制御装置は、請求項2に記載のように、車両の現在または未来の走行経路上の複数の曲折点における曲折方向およびこれら複数の曲折点間の走行時間のデータを取得するようになっていてもよい。この場合、車両状態情報表示装置は、取得した複数の曲折点における曲折方向をそれぞれ表す複数の曲折情報のうち、指定時刻を含む基準時間範囲内に車両が通過する曲折点の曲折情報を、当該曲折点の通過時刻順に並べて画像表示装置の表示画面に表示させ、かつ、表示画面において、隣り合う曲折情報間の距離を、それら曲折点間の走行時間が長いほど長くなるようにしてもよい。このとき、基準時間範囲は、指定時刻と現在時刻との時間差が大きくなるほど、より長くなっていてもよい。
【0008】
このように、曲折するタイミングの間隔を表示画面上の距離によって表すことで、ユーザは、どのぐらいの時間走行すれば曲折することになるのかを、あるいは、どのぐらいの時間間隔で曲折を経たのかを、容易に視覚的に把握することができる。
【0009】
また、請求項3に記載のように、車両状態情報表示制御装置は、現在位置から指定時刻までに到達可能な複数の可能到達点を、表示画面の地図上に複数表示させるようになっていてもよい。このようになっていることで、ユーザは、指定した時刻までに現在位置からどこまで走行できるか、あるいは現在位置に指定時刻以内に到達できる範囲がどのようになっているかを、視覚的に把握することができるようになる。
【0010】
また、請求項4に記載の発明においては、車両状態情報表示制御装置が、過去または未来の時刻の指定を検出し、検出した指定に係る指定時刻と車両の第1種の状態との関連を示す第1の時間関連情報を車両内の第1の表示装置に表示させると共に、当該指定時刻と車両の第2種の状態との関連を示す第2の時間関連情報を車両内の第2の表示装置に表示させる。この第1の表示装置と第2の表示装置とは分離している。
【0011】
このようになっていることで、車両状態情報表示制御装置は、2つの表示装置に同じ指定時刻についての異なる種類の時間関連情報を表示させるので、ユーザに対して過去または未来に関する複数の情報提供を、同時性をもって行うことができる。
【0012】
また、請求項5に記載の発明においては、経路上の複数の曲折点における曲折方向および複数の曲折点間の走行時間のデータを取得し、取得した複数の曲折点における曲折方向をそれぞれ表す複数の曲折情報を、曲折点の通過時刻順に並べて画像表示装置の表示画面に表示させる。さらに車両状態情報表示制御装置は、当該表示画面において、隣り合う曲折情報間の距離を、それら曲折点間の走行時間が長いほど長くなるようにする。
【0013】
このように、曲折するタイミングの間隔を表示画面上の距離によって表すことで、ユーザは、どのぐらいの時間走行すれば曲折することになるのかを、あるいは、どのぐらいの時間間隔で曲折を経たのかを、容易に視覚的に把握することができる。
【0014】
また、請求項6に記載のように、車両状態情報表示制御装置は、曲折情報を、曲折点の通過時刻順に一直線に並べて表示させてもよい。そしてこのとき、曲折情報は、当該曲折点における進入前後の曲折方向の相対変化(例えば右折、左折)を視覚的に表示する絵柄であってもよい。このようになっていることで、ユーザは、その曲折点においてどちらに曲がることになっているのかを、あるいはどちらに曲がったのかを、さらに容易に把握することができる。
【0015】
また、請求項7に記載のように、車両状態情報表示制御装置は、当該経路上の複数の分岐点のそれぞれまでの走行時間(以下、それぞれ第1種走行時間という)およびこれら複数の分岐点のそれぞれから、当該分岐点に対応する当該経路外の地点までの走行時間(以下、それぞれ第2種走行時間という)を特定するようになっていてもよい。このとき、車両状態情報表示制御装置は、同じ分岐点に対応する第1種走行時間と第2種走行時間を2つの成分とする複数の位置を、表示画面における2次元座標面上のマークとして表示させるようになっていてもよい。
【0016】
このようになっていることで、ユーザは、自車両がいつ分岐するか(またはいつ分岐したか)についての情報と、分岐してから当該地点までどれくらい走行するか(またはどれくらい走行したか)についての情報を、2次元的に把握することができる。
【0017】
また、請求項8に記載の発明においては、車両状態情報表示制御装置が、分岐点までの第1の経路上の第1の走行時間および当該分岐点から第2の地点までの第2の経路上の第2の走行時間を特定し、当該第1の走行時間および第2の走行時間の2つの成分から成る位置を、画像表示装置の表示画面における2次元座標面上のマークとして表示させる。
【0018】
このようになっていることで、ユーザは、自車両がいつ分岐するか(またはいつ分岐したか)についての情報と、分岐してから当該地点までどれくらい走行するか(またはどれくらい走行したか)についての情報を、2次元的に把握することができる。
【0019】
また、請求項9に記載の発明においては、車両状態情報表示制御装置が、過去または未来の時刻の指定を検出し、画像表示装置の表示画面内において、現在位置から到達可能な道路上に複数のマークを表示させると共に、繰り返し時刻を増加させ、その繰り返しの各回において、複数のマークのそれぞれを、当該時刻の増加に応じた走行距離だけ道路上を進行させる。このようになっていることで、車両状態情報表示制御装置は、車両の走行可能な経路を時系列順に段階的に複数表示させることができる。
【0020】
また、請求項10に記載のように、車両状態情報表示制御装置は、当該複数のマークの1つを進行させた結果、当該1つのマークが交差点を通過したことに基づいて、当該交差点から分岐する道路で、かつ当該マークが通っていない道路に、当該複数のマークに新たに属するマークとして、新たなマークを生成するようになっていてもよい。このようになっていることで、車両状態情報表示制御装置は、道路が分岐しても、分岐によって生じた道路毎に、その道路において時系列順かつ段階的に進行するマークを表示させることができる。
【0021】
さらに、請求項11に記載のように、車両状態情報表示制御装置は、当該複数のマークのうち2つのマークが衝突することに基づいて、当該2つのマークのうち1つ以上を表示画面から消去させるようになっていてもよい。2つのマークが衝突するということは、その衝突地点から見てどちらの方向にもマークが通ったことを意味している。したがって、これらのマークを消去することで、既に他のマークが通った経路を他のマークが再度通る可能性を低減することができる。なお、2つのマークが衝突するとは、現に衝突したこと、同じ道路をすれ違ったこと、不可避的に衝突またはすれ違う運命にあること、のいずれをも含む概念である。
【0022】
また、請求項12に記載のように、車両状態情報表示制御装置は、これら複数のマークの1つを進行させた結果、当該1つのマークが現在地点に近づいたことに基づいて、当該マークを表示画面から消去させるようになっていてもよい。このようになっていることで、車両状態情報表示制御装置は、現在地点から遠ざかる方向への経路を通って到達できる地点を表示させることができる。
【0023】
また、請求項13に記載の発明においては、車両状態情報表示制御装置は、過去または未来の時刻の指定を検出し、現在位置から検出した指定に係る時刻までに走行可能な複数の可能経路を複数算出する。さらに車両状態情報表示制御装置は、画像表示装置の表示画面内において、当該複数の可能経路の端部に相当する複数の位置に複数のマークを表示させると共に、当該複数のマークのそれぞれの表示態様を、当該マークに対応する可能経路に基づいて制御する。
【0024】
このようになっていることで、ユーザは、指定した時刻までに現在位置からどこまで走行できるか、あるいは現在位置に指定時刻以内に到達できる範囲がどのようになっているかを、容易に視覚的に把握することができるようになる。さらに、各マークが走行した経路がどのようなものであるかについても、視覚的に把握できるようになる。
【0025】
また、請求項14の発明においては、過去または未来の時刻の指定を検出し、現在位置から検出した指定に係る時刻までに走行可能な複数の可能経路を複数算出するようになっている。さらに、車両状態情報表示制御装置は、画像表示装置の表示画面内において、当該複数の可能経路の端部に相当する複数の位置に複数のマークを表示させると共に、当該複数のマークのうち1つを指定するユーザの操作があったことに基づいて、当該複数の経路のうち、現在位置から当該1つのマークまでの経路を表示させる。
【0026】
このようになっていることで、ユーザは、指定した時刻までに現在位置からどこまで走行できるか、あるいは現在位置に指定時刻以内に到達できる範囲がどのようになっているかを、容易に視覚的に把握することができるようになる。さらに、指定したマークが走行した経路がどのようなものであるかについて、視覚的に把握できるようになる。
【0027】
また、請求項15に記載の発明においては、車両状態情報表示制御装置が、過去または未来の時刻の第1の指定を検出し、第1の指定に係る時刻までに現在位置から走行可能な複数の経路(以下、それぞれ第1種可能経路という)を複数算出する。さらに、車両状態情報表示制御装置は、画像表示装置の表示画面内において、当該複数の第1種可能経路の端部に相当する複数の位置に複数のマークを表示させる。またさらに、車両状態情報表示制御装置は、過去または未来の時刻の第2の指定を検出し、さらに、当該複数のマークのうちいずれか1つのマークの位置から、検出した前記第2の指定に係る時刻までに走行可能な複数の経路(以下、それぞれ第2種可能経路という)を複数算出する。そして、車両状態情報表示制御装置は、画像表示装置の表示画面内において、当該複数の第2種可能経路の端部に相当する複数の位置に複数のマークを表示させる。
【0028】
このようになっていることで、ユーザは、指定した時刻までに現在位置からどこまで走行できるか、あるいは現在位置に指定時刻以内に到達できる範囲がどのようになっているかを、容易に視覚的に把握することができるようになる。さらに、ユーザは、第1の指定にかかる時間経過後の地点からさらに第2の指定に係る時間だけ移動することによって到達できる範囲を容易に視覚的に把握することができる。
【0029】
また、請求項16に記載の発明において、車両状態情報表示制御装置は、ユーザ操作に基づいて設定された目的地への経路の走行案内を行うと共に、目的地と走行案内を行った時間帯とを関連付けて記録する。そして、車両状態情報表示制御装置は、物の回転運動の量を検出し、検出した回転量に基づいて、回転量が大きいほど現在時刻より遠い過去の時点の指定を検出する。さらに車両状態情報表示制御装置は、記録した上記情報に基づいて、検出した指定に係る時点において走行案内が行われている対象の目的地および当該走行案内を行った時間帯を、画像表示装置に表示させる。このようにすることで、ユーザは、時計の針を動かすような感覚で、表示のための指定時点を操作することで、過去の走行スケジュールを視覚的に把握することができる。
【0030】
また、請求項17に記載のように、車両状態情報表示制御装置は、時間帯の表示を、円内の、当該時間帯における、時計の短針移動範囲に対応する領域の強調表示により行うようになっていてもよい。このようになっていることで、ユーザは、時計の表示に対する時間感覚を使って、当該時間帯の表示を認識することができる。
【0031】
また、請求項18に記載のように、請求項1に記載の発明を、プログラムとして捉えることもできる。このようなプログラムを実行することで、請求項1と同様の効果を得ることができる。また、請求項19に記載のように、請求項4に記載の発明を、プログラムとして捉えることもできる。このようなプログラムを実行することで、請求項4と同様の効果を得ることができる。また、請求項20に記載のように、請求項5に記載の発明を、プログラムとして捉えることもできる。このようなプログラムを実行することで、請求項5と同様の効果を得ることができる。また、請求項21に記載のように、請求項8に記載の発明を、プログラムとして捉えることもできる。このようなプログラムを実行することで、請求項8と同様の効果を得ることができる。また、請求項22に記載のように、請求項9に記載の発明を、プログラムとして捉えることもできる。このようなプログラムを実行することで、請求項9と同様の効果を得ることができる。また、請求項23に記載のように、請求項13に記載の発明を、プログラムとして捉えることもできる。このようなプログラムを実行することで、請求項13と同様の効果を得ることができる。また、請求項24に記載のように、請求項14に記載の発明を、プログラムとして捉えることもできる。このようなプログラムを実行することで、請求項14と同様の効果を得ることができる。また、請求項25に記載のように、請求項15に記載の発明を、プログラムとして捉えることもできる。このようなプログラムを実行することで、請求項15と同様の効果を得ることができる。また、請求項26に記載のように、請求項16に記載の発明を、プログラムとして捉えることもできる。このようなプログラムを実行することで、請求項16と同様の効果を得ることができる。
【発明を実施するための最良の形態】
【0032】
(第1実施形態)
以下、本発明の第1実施形態について説明する。図1に、本実施形態に係る車両用ナビゲーション装置1のハードウェア構成を示す。この車両用ナビゲーション装置1は、位置検出器11、音声出力装置12、操作部13、画像表示装置14、VICS受信機15、RAM16、ROM17、データ記憶部18、および制御回路19を有している。
【0033】
位置検出器11は、いずれも周知の図示しない地磁気センサ、ジャイロスコープ、車速センサ、およびGPS受信機等のセンサを有しており、これらセンサの各々の性質に基づいた、車両の現在位置や向きを特定するための情報を制御回路19に出力する。音声出力装置12は、音声回路およびスピーカを有する。音声回路は、制御回路19から受けた音声データに基づく音声信号をスピーカに出力する。
【0034】
操作部13は、車両用ナビゲーション装置1に設けられた複数のメカニカルスイッチ、画像表示装置14の表示面に重ねて設けられたタッチパネル等の入力装置から成り、ユーザによるメカニカルスイッチの操作およびタッチパネルのタッチに基づいた信号を制御回路19に出力する。操作部13は、物の回転運動の量(例えば回転角、回転角速度)を検出する回転量検出装置を有している。
【0035】
回転量検出装置としては、例えば、図2に示す指回転検出装置13a、図3に示すダイヤル回転検出装置13b、図4および図5に示すリューズ回転検出装置13cのいずれかを採用してもよい。
【0036】
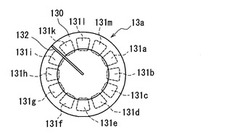
指回転検出装置13aは、例えば車両のドライバー席の脇に設置され、図2の上面図に示すように、可視光線を遮蔽して赤外線を透過する樹脂からなる円形の上部カバー130と、その上部カバー130の直下にある12個の指検出部131a〜m、および図示しない検出回路等を有している。
【0037】
操作部13の上部には、操作部13の中央から外縁まで真っ直ぐ伸びる一本の稜部132が固定されている。そして操作部13は、図示しないモータ等の回転機構によって、当該中央を軸として、12時間に一周のスピードで等速回転する。これにより、稜部132は、時計盤上の短針のように、現在時刻を示す。
【0038】
指検出部131a〜mは、車体に対して動かないように、上部カバー130の中央部を取り囲むように、円環状に配置されている。これら指検出部131a〜mのぞれぞれは、赤外線を上部カバー130の方向に投射する装置、および、上部カバー130の方向から入射する赤外線量を検出するフォトダイオード等のセンサを有している。人の指が上部カバー130の外周部の一部に近づくと、その一部の直下にある指検出部131から投射された赤外線が指で反射される。その反射光は、当該指検出部131のセンサによって検出される。このように、指検出部131a〜mのそれぞれは、指によって反射された赤外線を検出することで、それぞれの上方に指があることを検出する。
【0039】
このような指回転検出装置13aの上部カバー130を、その外周に沿って指でなぞると、指回転検出装置13aの検出回路は、指検出部131a〜mによる指の検出の時間変化に基づいて、その指の移動量および移動方向、すなわち、上部カバー130の中央の周りの指の回転角および回転方向を検出し、その検出結果を制御回路19に出力する。
【0040】
ダイヤル回転検出装置13bは、例えば車両のドライバー席の脇に設置され、図3の上面図に示すように、中央部135、中央部135をとり囲む回転部136、回転部の直下にある底部(図示せず)、検出回路(図示せず)等を有している。
【0041】
回転部136は、可視光線を透過しない樹脂から成る円弧状の非透過部136aと、可視光線を透過する樹脂から成る円弧状の透過部136bとを、各円弧の端部において互いに繋ぎ合わせることで生成される。この回転部136は、中央部135の周りの一部角度範囲(あるいは全角度範囲)で回転可能となっている。ダイヤル回転検出装置13bの底部の外周付近には、中央部135を中心として円環上に等間隔に配置された複数個の目盛り(例えば目盛り134)が設けられている。
【0042】
回転部136をユーザが指で回転させると、検出回路がその回転角度および回転方向を検出し、検出した回転角度および回転方向を示す信号を制御回路19に出力する。回転部136が回転すると、底部の目盛りのうち、透過部136bに隠される部分が変化する。この変化により、ユーザは、回転部136の回転角を視覚的に把握することが容易になる。また、目盛りが時計盤の目盛りと同じ様式の配置となっているので、ユーザが容易に回転角を時間に見立てることができる。
【0043】
リューズ回転検出装置13cは、例えば車両のドライバー席の脇に設置され、図4および図5に示す通り、車体に固定される軸受部137、ユーザの操作を受けて回転するつまみ部138、つまみ部138に固定される軸部139、検出回路等を有している。軸部139はつまみ部138の回転軸に沿って設けられている。また、軸受部137の中心には、軸部139をちょうど挿入できる大きさの穴が設けられている。検出回路は、図4に示すようにつまみ部138が軸受部137の方向に押し込まれている状態においては、つまみ部138の矢印方向への回転角を検出し、その回転角が大きくなるほど大きい分刻みの時間変化を示す信号を、回転方向の信号と共に制御回路19に出力する。また検出回路は、図5に示すようにつまみ部138が軸受部137から所定量だけ引き出されている状態においては、つまみ部138の矢印方向への回転角を検出し、その回転角が大きくなるほど大きい、分刻みよりも細かい秒刻みの時間変化を示す信号を、回転方向の信号と共に制御回路19に出力する。
【0044】
画像表示装置14は、制御回路19から出力された信号に基づいた映像をユーザに表示する。具体的には、画像表示装置14は、互いに離れた位置に設けられたメインディスプレイ14a、ヘッドアップディスプレイ14b、およびメータディスプレイ14cを有している。
【0045】
メインディスプレイ14aは、車両のダッシュボード内またはダッシュボード上等の位置に配置される画像表示装置である。ヘッドアップディスプレイ14bは、車両のフロントガラスに映像を投影することで、ユーザがフロントガラス越しの前方の風景と共に当該映像を見ることができるようにする装置である。メータディスプレイ14cは、速度メータ等のメータ類が配置される位置に配置される画像表示装置である。本実施形態においては、このメータディスプレイ14cの表示画面は円形となっている。
【0046】
VICS受信機15は、道路沿いに設置された路上機から無線送信された道路の渋滞情報、交通規制情報等を受信して制御回路19に出力する無線受信機である。
【0047】
データ記憶部18は、DVD、CD、HDD等の不揮発性の記憶媒体およびそれら記憶媒体に対してデータの読み出し(および可能ならば書き込み)を行う装置から成り、制御回路19が実行するプログラム、経路案内用の地図データ等を記憶している。
【0048】
地図データは、リンクおよびノードの位置、属性(車幅、制限速度、高速道路か一般道路か等)、ノードとリンクとの接続関係情報等を含む道路データ、および施設データを有している。施設データは、施設毎のエントリを複数有しており、各エントリは、対象とする施設の名称情報、所在位置情報、施設種類情報等を示すデータを有している。
【0049】
制御回路(コンピュータに相当する)19は、ROM17およびデータ記憶部18から読み出した車両用ナビゲーション装置1の動作のためのプログラムを実行し、その実行の際にはRAM16、ROM17、およびデータ記憶部18から情報を読み出し、RAM16およびデータ記憶部18に対して情報の書き込みを行い、位置検出器11、音声出力装置12、操作部13、および画像表示装置14と信号の授受を行う。
【0050】
図6に、この制御回路19がプログラムを実行することによって行う具体的な処理の一部を示す。この図に示す通り、制御回路19が実行する処理としては、現在位置特定処理19a、誘導経路算出処理19b、経路案内処理19c、走行経路記録処理19d、マルチ表示制御処理19e等がある。
【0051】
現在位置特定処理19aは、位置検出器11からの信号に基づいて、周知のマップマッチング等の技術を用いて車両の現在位置や向きを特定する処理である。
【0052】
誘導経路算出処理19bは、操作部13からユーザによる目的地の入力を受け付け、現在位置から当該目的地までの最適な誘導経路を算出する処理である。また、誘導経路算出処理19bにおいて、制御回路19は、誘導経路上の各リンクを走行する時間帯を算出する。なお、この時間帯の算出においては、車両は所定の一定速度(例えば時速20キロメートル)で走行するものとして算出するようになっていてもよい。また、制御回路19は、誘導経路上のリンク毎に、そのリンクの属性(車幅、制限速度、高速道路か一般道路か等)を地図データまたはVICS受信機15からの信号に基づいて特定し、その特定した結果に基づいて各リンクの走行速度を推定し、その推定結果を当該時間帯の算出に用いるようになっていてもよい。
【0053】
また、誘導経路算出処理19bにおいて制御回路19は、ユーザが目的地の入力と共に出発地点および予定出発時刻(すなわち現在時刻より未来の時刻)の入力を行った場合、目的地までの誘導経路および誘導経路上の各リンクの走行時間帯を、当該予定出発時刻に車両が出発地点から走行を開始するものとして、算出する。そして、算出した誘導経路および走行時間帯を、走行予定スケジュールとしてデータ記憶部18に記録する。
【0054】
また、誘導経路算出処理19bにおいて制御回路19は、誘導経路上から外れて周辺施設へ向かうための離脱経路およびその離脱経路を周辺施設まで走行するまでにかかる走行時間を算出する。ここで、周辺施設とは、誘導経路周辺の特定の属性(例えばコンビニエンスストア、ガソリンスタンド、レストラン)を有する複数の施設をいう。
【0055】
経路案内処理19cは、データ記憶部18から地図データを読み出し、算出された誘導経路、目的地、経由地および現在位置等をこの地図データの示す地図上に重ねた画像を、メインディスプレイ14aに表示させ、案内交差点の手前に自車両が到達したとき等の必要時に、右折、左折等を指示する案内音声を音声出力装置12に出力させる処理である。また、経路案内処理19cにおいて、制御回路19は、目的地と、その目的地への誘導経路上の走行案内を行った時間帯とを関連付けて、データ記憶部18に記録する。
【0056】
走行経路記録処理19dは、現在位置特定処理19aによって特定した現在位置と現在日時とを関連付けた軌跡データを、データ記憶部18に繰り返し(例えば10秒周期で定期的に)記録する処理である。
【0057】
マルチ表示制御処理19eは、メインディスプレイ14a、ヘッドアップディスプレイ14b、メータディスプレイ14cのそれぞれに、同じ指定時刻についての異なる種類の時間関連情報を同時に表示させるための処理である。制御回路19は、このマルチ表示制御処理19eを実行するために、図7に示すプログラム100を繰り返し読み出して実行する。
【0058】
制御回路19は、プログラム100の1回分の実行において、まずステップ110では、ユーザによる指定時刻を特定する。具体的には、回転量検出装置からの信号に基づいて、回転量検出装置が検出した物の回転量に対して正の相関関係を有する未来時間差または過去時間差を特定し、その時間差を現在時刻に適用した結果の時刻を、指定時刻として特定する。
【0059】
例えば、ユーザが指回転検出装置13a、ダイヤル回転検出装置13b、リューズ回転検出装置13c等の回転量検出装置に対してある角度の回転操作(すなわち、指や部材等の物を回転させる操作)を行い、その角度を保持し続けると、制御回路19はその間、ステップ110の実行の度に、指定時刻をその角度に応じた量だけ増加または減少させる。指回転検出装置13aにおいては、ユーザが指で上部カバー130を円弧を描くように時計回りになぞってそのまま指を止めると、その指が上部カバー130から離れるまで、その円弧が中心に対して張る角度が大きいほど大きい量だけ、ステップ110の実行の度に増加させる。また、ユーザが指で上部カバー130を円弧を描くように反時計回りになぞってそのまま指を止めると、その指が上部カバー130から離れるまで、その円弧が中心に対して張る角度に応じた量だけ、ステップ110の実行の度に減少させる。
【0060】
回転角度と指定時刻の増加量の関係は、正の相関関係である、例えば、上述の円弧の角度が指検出部131の1個分に相当する場合増加量を1分とし、角度が指検出部131の3個分に相当する場合増加量を3分とし、角度が指検出部131の5個分に相当する場合増加量を30分とし、角度が指検出部131の9個分に相当する場合増加量を1時間とし、角度が指検出部131の11個分に相当する場合増加量を12時間とする。
【0061】
また、ユーザが回転量検出装置の状態を元に戻した状態が所定時間(例えば30秒)続くと、その後制御回路19はステップ110で指定時刻と現在時刻と同一時刻にする。回転量検出装置の状態を元に戻した状態とは、指回転検出装置13aから指を離した状態、ダイヤル回転検出装置13b、リューズ回転検出装置13cの回転を初期位置に戻した場合等がある。
【0062】
続いてステップ120では、メータディスプレイ14cに、当該指定時刻に関連する表示を行わせ、さらにステップ130では、ヘッドアップディスプレイ14bに、当該指定時刻に関連する表示を行わせ、さらにステップ140では、メインディスプレイ14aに、当該指定時刻に関連する表示を行わせる。なお、各ステップ120、130、140が終了しても、各画像表示装置14c、14b、14aは、新たな制御を制御回路19から受けない限り、直前に受けた制御による表示を継続する。そして、ステップ110〜140の1回分の処理は短時間で終了する。したがって、ユーザにとっては、各画像表示装置14a、14b、14cの表示は、同じ時刻についての表示を同時に行っているように見える。
【0063】
このような制御回路19の処理により、車両用ナビゲーション装置1は、これら3つの表示装置に、同じ指定時刻に関連する異なる種類の時間関連情報を表示させるので、ユーザに対して、複数の独立した画像表示装置14a〜cによる、過去または未来に関する情報提供を、同時性をもって行うことができる。
【0064】
以下、この制御回路19のマルチ表示制御処理19eによって具体的に画像表示装置14が行う表示の内容について説明する。
【0065】
(i)メータディスプレイ14cによる未来時刻表示:
制御回路19は、ステップ110で特定した指定時刻が未来の時刻である場合、ステップ120において、メータディスプレイ14cに、図8、図9に示すようなスケジューラを表示させる。このスケジューラは、自車両の未来のスケジュール、指定時刻、および現在時刻の間の時間関係を、時計盤を模した形式で表す。具体的には、スケジューラは、時刻ゲージ21、現在時刻表示線22、現在時刻を表示する文字23、スケジュール表示24、25、スケジュール期間表示線26、27、および指定時刻表示線28等の画像を構成要素として有する。
【0066】
時刻ゲージ21は、メータディスプレイ14cの円形の表示画面の外縁と同心かつやや小さい円と、その円上に等間隔に刻まれた12個の目盛り線とを有する。現在時刻表示線22は、メータディスプレイ14cの表示画面の中心20から時刻ゲージ21上の一点まで伸びる線分であり、その線分の方向により現在時刻を表す。例えば、図8、図9においては、現在時刻表示線22は5時の方向に伸びている。
【0067】
スケジュール表示24、25のぞれぞれは、自車両の未来のスケジュールにおける目的地および目的地への到着予想時刻を示す。自車両の未来のスケジュールは、誘導経路算出処理19bによって記録された走行スケジュール、または誘導経路算出処理19bによって特定された現在位置から目的地までの走行スケジュールである。この目的地は文字によって表示され、この到着予想時刻は、画面中心20から見た当該文字の方向によって表示される。
【0068】
スケジュール期間表示線26、27のそれぞれは、時刻ゲージ21よりやや小さい半径の円弧であり、その始点の画面中心20から見た方向が、走行スケジュールにおける出発予定時刻を示し、その終点の画面中心20から見た方向が、当該スケジュールにおける到着予想時刻を示している。すなわち、円弧の長さが、走行スケジュールにおける予想走行期間を示している。
【0069】
指定時刻表示線28は、メータディスプレイ14cの表示画面の中心20から時刻ゲージ21上の一点まで伸びる線分であり、その線分の方向により直前のステップ110で特定した指定時刻を表す。このような表示により、ユーザは、現在時刻、指定時刻、および予定走行スケジュールの時間的関係を、時計盤を見る感覚で把握することができる。なお、図9は、ユーザがメータディスプレイ14cに指を触れた直後のメータディスプレイ14cの表示である。この場合、指定時刻と現在時刻とが一致し、時刻ゲージ21と指定時刻表示線28とは重なるか、あるいは、指定時刻表示線28は表示されない。また、予定スケジュールが記録されていない場合は、制御回路19は、図8および図9の場合に比べてスケジュール表示もスケジュール期間表示線もメータディスプレイ14cに表示させない。
【0070】
(ii)ヘッドアップディスプレイ14bによる未来時刻表示:
制御回路19は、ステップ110で特定した指定時刻が未来の時刻である場合、ステップ130において、ヘッドアップディスプレイ14bに、図10、図11に示すような1次元タイムマップを表示させる。この1次元タイムマップは、現在時刻から指定時刻までの、自車両の未来のスケジュールにおける曲折(右折、左折等)タイミングを、直線(以下、縦軸という)上の1次元配置によって表す。
【0071】
例えば、指定時刻が10分後以下である場合、制御回路19は、図10に示すように、現在時刻から10分後までの時間を1分間隔で表示画面の縦方向に表す目盛りと、その目盛りに合わせて車両の曲折タイミングの1つを表す矢印31と、当該曲折タイミングにおける曲折点(例えば交差点)の名称(具体的にはTakanodai 4.)を、ヘッドアップディスプレイ14bに表示させる。矢印31は、先端付近がほぼ直角に折れ曲がった形状を有しており、その折れ曲がり部分に相当する位置の表示画面中の高さが曲折タイミングを表し、その折れ曲がった部分の後ろに続く直線部分の長さが、曲折タイミングまでの連続直進時間を表している。また、折れ曲がりの方向が、その曲折点における自車両の相対的な折れ曲がり方向(右、左等)を表している。
【0072】
また例えば、指定時刻が10分後を越え1時間後以内である場合、制御回路19は、図11に示すように、図10に比べて表示時間範囲を拡大して、現在時刻から1時間後までの時間を10分間隔で表示画面の縦方向に表す目盛りと、その目盛りに合わせて車両の曲折タイミングをそれぞれ表す矢印31〜35と、当該曲折タイミングにおける曲折点(例えば交差点)の名称を、ヘッドアップディスプレイ14bに表示させる。各矢印31〜35の折れ曲がり部分の後ろに続く直線部分は、縦軸上に一直線に縦に並べられている。そして、その矢印31〜35の直線部分の長さは、当該矢印31〜35が示す曲折タイミングの直前までの連続直進時間に比例する。
【0073】
このように、曲折するタイミングの間隔を表示画面上の距離によって表すことで、ユーザは、どのぐらいの時間走行すれば曲折することになるのかを容易に視覚的に把握することができる。このように、矢印31〜35が縦に積み重なるように表示されるので、ユーザが総走行時間を把握し易くなる。
【0074】
また、制御回路19は、ステップ110で特定した指定時刻が未来の時刻であり、かつ、周辺施設表示制御を行う場合、ステップ130において、ヘッドアップディスプレイ14bに、図12に示すような2次元タイムマップを表示させる。ここで、周辺施設表示制御とは、出発地(例えば現在地)から目的地までの誘導経路の周辺施設の情報をヘッドアップディスプレイ14bに表示させることをいう。周辺施設表示制御を行うか否かは、ユーザによる操作部13を用いた設定操作に基づいてあらかじめ決定していてもよい。
【0075】
この2次元タイムマップは、上述の1次元タイムマップに、自車両の予定走行経路から外れて周辺施設に到達するために誘導経路を外れるべき離脱時刻、当該誘導経路を外れるべき離脱方向、当該誘導経路を外れてから当該周辺施設に到達するまでにかかる離脱後走行時間等の情報を付加したものである。具体的には、2次元タイムマップにおいては、制御回路19は、複数の周辺施設のそれぞれを表す周辺施設マーク37、39を、当該周辺施設の離脱時刻を縦軸の成分とし、当該周辺施設の離脱後走行時間を横軸の成分とした位置にプロットする。ここで、縦軸から右方向の時間は、右折後の時間を表し、縦軸から左方向の時間は、左折後の時間を表す。また、制御回路19は、縦軸上から左または右に直角に折れて当該周辺施設マーク37、39にそれぞれ到達する折れ線36、38をこの2次元タイムマップに追加する。
【0076】
このようになっていることで、ユーザは、自車両が周辺施設にたどり着くにはいつ誘導経路から分岐するかについての情報と、分岐してから当該周辺施設までどれくらい走行するかについての情報を、2次元的に把握することができる。
【0077】
なお、既述の通り、周辺施設への離脱方向、離脱後走行時間は、上述の誘導経路算出処理19bによって算出する。また、離脱時刻は、誘導経路算出処理19bによって算出された離脱経路の始点および当該始点に到達するまでにかかる誘導経路上の走行時間に基づいて特定することができる。
【0078】
また、ユーザが回転量検出装置の回転を初期位置に戻して上述の所定時間が経過し、それによってステップ110で指定時刻が現在時刻に戻った場合でも、制御回路19は、ステップ130においては、その表示内容を保持し続ける。
【0079】
(iii)メインディスプレイ14aによる時刻表示:
制御回路19は、ステップ140において、メインディスプレイ14aに地図表示を行わせるために、図13に示すような処理を実行する。制御回路19は、この処理において、まずステップ142で、仮想時刻tの初期値として、初期時刻T0にステップ時間ΔTを加算した値を設定する。ここで、初期時刻T0は現在時刻でもよいし、前回のプログラム100の実行においてステップ110で検出された指定時刻(すなわち前回の指定時刻)でもよい。ここで、ステップ時間ΔTは、自車両の未来の位置の予測に要求される精度が高いほど小さくする。例えば、ステップ時間ΔTの絶対値は、指定時刻T1と初期時刻T0との時間間隔の1/10またはそれ以下の値に設定する。そしてステップ時間ΔTは、指定時刻が未来の時刻である場合には正の値であり、指定時刻が過去の時刻である場合には負の値となる。
【0080】
続いてステップ144で、現時点の仮想時刻tが指定時刻T1を過ぎたか否かを判定し、過ぎていなければ続いてステップ146を実行し、過ぎていれば続いてステップ149を実行する。仮想時刻tが指定時刻T1を過ぎるとは、指定時刻T1が未来の時刻の場合、仮想時刻tが指定時刻T1よりも未来の時刻となることをいい、また指定時刻T1が過去の時刻の場合、仮想時刻tが指定時刻T1よりも過去の時刻となることをいう、
ステップ146では、設定された仮想時刻tにおける自車両の仮想位置の特定を行う。この特定処理の詳細については後述する。続いてステップ148では、仮想時刻tの値をステップ時間ΔTだけ進ませる。ステップ148の後、再度ステップ144を実行する。ステップ149では、メインディスプレイ14aに、地図を表示させる。この地図は、直前に実行されたステップ146において特定された仮想位置を含む地図である。そしてこの地図上の、当該仮想位置に、仮想車両マークを表示させる。ステップ149の後、ステップ140の実行が終了する。
【0081】
以上のようなステップ140の処理を実行することで、制御回路19は、初期時刻T0
から指定時刻T1までステップ時刻ΔT刻みで、仮想時刻tを時間経過順に進め(ステップ142、144、148参照)、それぞれの仮想時刻において、その仮想時刻における仮想位置を特定する(ステップ146参照)。そして、指定時刻T1を越える直前の仮想時刻における仮想位置を含む地図を、その地図上の仮想位置に仮想車両マークを重ねて、メインディスプレイ14aに表示させる。
【0082】
したがって、メインディスプレイ14aは、制御回路19がプログラム100を実行する度に、自車両を回転量検出装置が検出した角度が大きくなるほど大きい時間刻みで、仮想車両マークを未来に進め、あるいは過去に戻す。なお、ステップ146で行う自車両の仮想位置特定の方法は、ステップ149で行う画像表示の形態によって異なる。画像表示の形態としては、具体的には(A)ルートスクロール、(B)到達地点群表示がある。以下、これらの地図表示制御について詳述する。
【0083】
(A)ルートスクロール:
制御回路19は、指定時刻が未来の時刻であり、かつ、現在位置から目的地までの誘導経路が設定されている場合、ステップ149では、ルートスクロールによる地図表示を行う。ルートスクロールにおいて、制御回路19は、図14に示すように、誘導経路42に従えば指定時刻T1において自車両が存在するであろう予想位置の周辺の地図と、その地図上の予想位置上の仮想車両マーク43と、その地図上の誘導経路42と、を重畳させた画像を、メインディスプレイ14aに表示させる。
【0084】
このために、制御回路19は、ステップ146において、誘導経路算出処理19bの処理によって特定された誘導経路に沿って、仮想時刻tにおける自車両の位置を算出する。なお、この算出に用いる自車両の移動速度(すなわち、仮想時間の単位変化量当たりの自車両の移動量)は、誘導経路算出処理19bにおいて推定した誘導経路上の各リンクの走行速度と同じとしてもよい。
【0085】
この場合、制御回路19によるプログラム100の繰り返し実行によって、メインディスプレイ14aは、地図上の誘導経路に沿って、仮想車両マークを未来に進め、仮想車両マークの移動とともに、その仮想車両マークが表示画面内に入るよう、地図をスクロールする。
【0086】
また、制御回路19は、指定時刻が過去の時刻である場合、ステップ149では、ルートスクロールによる地図表示を行う。ルートスクロールにおいて、制御回路19は、過去の時刻を示す指定時刻T1において自車両が存在していた位置の周辺の地図と、その地図上の予想位置上の仮想車両マークと、指定時刻T1を含む期間意おける自車両の走行経路を重畳させた画像を、メインディスプレイ14aに表示させる。
【0087】
このために、制御回路19は、ステップ146において、走行経路記録処理19dによってデータ記憶部18に記録された自車両の過去の軌跡データに基づいて、過去の仮想時刻tにおいて自車両が存在していた位置を特定する。なお、過去についてのルートスクロールを行う場合は、ステップ144〜148の処理は省略し、ステップ149において指定時刻T1における自車両の位置を過去の軌跡データに基づいて算出するようになっていてもよい。
【0088】
この場合、制御回路19によるプログラム100の繰り返し実行によって、メインディスプレイ14aは、地図上の誘導経路に沿って、仮想車両マークを過去に進め、仮想車両マークの移動とともに、その仮想車両マークが表示画面内に入るよう、地図をスクロールする。
【0089】
(B)到達地点群表示(イケラブル):
制御回路19は、指定時刻が未来の時刻であり、かつ、現在位置から目的地までの誘導経路が設定されていない場合、ステップ149では、到達地点群表示による地図表示を行う。到達地点表示において、制御回路19は、図15に示すように、現在時刻に現在地51から走行を開始して指定時刻に到達できる仮想位置における複数の仮想車両マーク52a〜mを、現在地51周辺の地図画像に重畳する。
【0090】
このために、制御回路19は、ステップ146において、図16のフローチャートに示すような処理を、仮想位置毎に実行する。仮想位置は、以下説明する通り、その数が増減する場合がある。そして、仮想位置の情報は、ユーザが回転量検出装置の状態を元に戻した状態が所定時間続くまでは、RAM16中に保持され続ける。この到達地点群表示のための仮想位置の情報は、仮想位置の現在の所在位置、仮想位置の進行方向(道路をどちら方向に進むか)、および仮想位置の移動経路履歴を含んでいる。また、ユーザが回転量検出装置の状態を元に戻した状態が所定時間続いた後、制御回路19は、仮想位置が自車両の現在位置に2つあるようにRAM16の情報を書き換え、その後、新たに回転量検出装置を操作するまでの状態(すなわち初期状態)においては、その情報を保持する。この2つの仮想位置のうち、1つは自車両と同じ進行方向の仮想位置であり、もう1つは自車両と反対の進行方向の仮想位置である。
【0091】
制御回路19は、複数の仮想位置のそれぞれについて、ステップ210〜270を実行し、それぞれの実行において、まずステップ210で、当該仮想位置を、当該仮想位置が現在いる道路に沿って、当該仮想位置の進行方向に、時刻ΔT分だけ進める。なお、図13のステップ144、146、148の繰り返しにおいて、仮想位置の情報はRAM16内で破棄されないので、ステップ210で当該仮想位置を時刻ΔT分だけ進めることは、仮想時刻tにおける仮想位置を算出することに相当する。この処理に用いる仮想位置の移動速度(すなわち、仮想時間の単位変化量当たりの自車両の移動量)は、地図データの当該リンクの属性情報に基づいて特定した当該リンクの走行速度を用いてもよい。
【0092】
続いてステップ220では、当該仮想位置が、ΔT分だけ進行することで、いずれかの交差点を通過したか否かを判定する。通過したと判定すると続いてステップ230を実行し、通過しないと判定すると続いてステップ240を実行する。
【0093】
ステップ230では、通過した交差点から分岐する道路のうち、現在当該仮想位置が存在する道路でも、当該仮想位置が過去に走行した道路でもない道路上に、その交差点から遠ざかる方向を進行方向とする仮想位置を新たに生成する。なお、このように生成される仮想位置についての移動経路履歴は、生成の原因となった当該仮想位置の移動経路履歴を引き継ぐものとする。このようにすることで、1つの仮想位置が、交差点において、新たな道路の数だけ複数に分裂することになる。なお、制御回路19は、VICS受信機15から取得した、一方通行道路、通行止め道路等の道路規制情報または道路障害情報に基づいて、車両が走行不能な経路に対しては、新たな仮想位置を生成しないようにしてもよい。ステップ230に続いては、ステップ240を実行する。
【0094】
ステップ240では、当該仮想位置が時刻ΔT分だけ進んだことで現在位置に近づいたか否かを判定し、近づいていれば続いてステップ280で当該仮想位置の情報をRAM16から消去する。近づいていなければ続いてステップ250を実行する。
【0095】
ステップ250では、当該仮想位置が走行している道路を先行する他の仮想位置があるか否かを判定し、あれば続いてステップ280で当該仮想位置の情報をRAM16から消去し、なければ続いてステップ260を実行する。先行する他の仮想位置とは、当該道路を過去に同じ方向に通ったことのある仮想位置をいう。
【0096】
ステップ260では、当該仮想位置が他の仮想位置と衝突するか否かを判定し、衝突するなら続いてステップ280で当該仮想位置の情報をRAM16から消去する。衝突すると判定しないなら続いてステップ270を実行する。他の仮想位置と衝突するか否かは、時刻ΔT分だけ進行して、当該他の仮想位置のある道路を、当該仮想位置と反対方向に進行した結果、当該他の仮想位置の所在位置を通過するか否かによって判定してもよい。または、他の仮想位置と衝突するか否かは、まだ現に衝突していないものの、このまま道路を進行すれば不可避的に当該他の仮想位置と現に衝突する運命にあるか否かによって判定してもよい。なお、このステップ260では、初期状態のように仮想位置が全部で2つしかない場合は、それらについてはどのような場合でも衝突すると判定しないようになっていてもよい。
【0097】
ステップ270では、当該仮想位置に対応する仮想車両マークの色彩を、当該仮想位置の移動経路履歴に記載の道路種別に基づいて決定する。具体的には、図17に示すように、その仮想位置が一般道のみを進行してきた場合は、マーク53のように第1種の色彩(例えば透明色、白色、黒色)を仮想車両マークの色彩として設定し、その仮想位置が高速道路を進行中である場合は、マーク54のように第2種の色彩(例えば赤色、青色、黄色等の第1種の色彩より目立つ色彩)を仮想車両マークの色彩として設定する。また、その仮想位置が一般道路を進行中であり、かつ、その仮想位置が過去に高速道路を進行したことがある場合は、マーク55のように第1の色彩と第2種の色彩を組み合わせた色彩として設定する。ステップ270、280の後、ステップ146の実行は終了する。
【0098】
なお、制御回路19は、ステップ149においては、RAM16中に記録されていない仮想位置に対応する仮想車両マークを、ステップ140で特定した位置に、ステップ270で設定した色彩で、メインディスプレイ14aに表示させる。また、制御回路19は、ステップ149においては、現在位置およびすべての仮想車両マークが表示画面内に入るように、表示する地図の縮尺を変更する。
【0099】
以上のように、到達地点群表示においては、制御回路19によるプログラム100の繰り返し実行によって、初期状態では2つだった仮想車両マークを、指定時刻の経過に応じた量だけ、進行可能な道路上を進行させる(ステップ142〜149参照)。また、それら仮想車両マークは、その進行において、交差点を通過した分だけ分裂して(ステップ220、230参照)増殖する。その結果、メインディスプレイ14aは、ステップ140の制御により、図15に示したような地図を表示し、さらに指定時刻が未来に進んだ場合、図18に示すように、仮想車両マーク52の数がさらに増えて現在地マーク51からより遠ざかった状態の地図を表示する。
【0100】
このようになっていることで、メインディスプレイ14aは、車両の到達可能な領域を時系列順に段階的に複数表示することができる。また、メインディスプレイ14aは、道路が分岐しても、分岐によって生じた道路毎に、その道路において時系列順かつ段階的に進行する仮想車両マークを表示することができる。
【0101】
さらに、メインディスプレイ14aは、当該複数の仮想車両マークのうち2つのマークが衝突することに基づいて、当該2つの仮想車両マークのうち1つを表示画面から消去させる(ステップ260、280参照)。2つの仮想車両マークが衝突するということは、その衝突地点から見てどちらの方向にも仮想車両マークが通ったことを意味している。したがって、これらの仮想車両マークのいずれかを消去することで、既に他のマークが通った経路を他のマークが再度通る可能性を低減することができる。
【0102】
また、制御回路19は、これら複数の仮想車両マークの1つを進行させた結果、当該1つの仮想車両マークが現在地点に近づいたことに基づいて、当該マークを表示画面から消去させる(ステップ240、280参照)。このようになっていることで、メインディスプレイ14aは、現在地点から遠ざかる方向への経路を通って到達できる地点を主に示すことができる。
【0103】
また、メインディスプレイ14aは、各仮想車両マークの色彩を、そのマークの進行経路履歴に基づいて変化させる。このようになっていることで、各仮想車両マークが走行した経路がどのようなものであるかについても、視覚的に把握できるようになる。
【0104】
また、メインディスプレイ14aが到達地点群表示のための処理を行っているときに、ユーザが操作部13のタッチパネルまたはメカニカルスイッチを用いて、メインディスプレイ14aが表示している仮想車両マークの1つを選択する第1種の操作を行ったとき、制御回路19は、その操作に基づいて、選択された仮想車両マークに対応する仮想位置の情報をRAM16から読み出し、その読み出した情報に基づいて、当該仮想車両マークの進行経路を、地図上に重畳表示させる。このようになっていることで、ユーザは、指定したマークが走行した経路がどのようなものであるかについて、視覚的に把握できるようになる。
【0105】
また、メインディスプレイ14aが到達地点群表示のための処理を行っているときに、ユーザが操作部13のタッチパネルまたはメカニカルスイッチを用いて、メインディスプレイ14aが表示している仮想車両マークの1つを指定するための第2種の操作を行うと共に回転量検出装置13を用いて新たな指定時刻を入力したとき、制御回路19は、その操作に基づいて、元の指定時刻に当該仮想車両マークの位置から出発して新たな指定時刻までに到達可能は範囲を表示するための処理を行う。具体的には、元の指定時刻および当該仮想車両マークの位置それぞれ現在時刻および現在位置とみなし、新たな指定時刻について、図13および図16の処理を実行する。これによって、制御回路19は、新たな指定時刻までに走行可能な複数の経路(第2種可能経路の一例に相当する)を複数算出すると共に、制御回路19は、メインディスプレイ14aの表示画面内において、当該複数の第2種可能経路の端部に相当する複数の位置に複数の仮想車両マークを表示させる。このようになっていることで、ユーザは、当該仮想車両マークの位置からからさらに新たな指定に係る時刻まで移動することによって到達できる範囲を、容易に視覚的に把握することができる。
【0106】
また、ルートスクロールや到達地点群表示と共に、制御回路19は、ステップ149において、表示されている地図画像に、さらに、指定時刻における交通状況、天候、外界の環境等の情報等を示す画像を重畳してもよい。例えば、未来の指定時刻における渋滞予想情報をVICSで取得し、取得した結果に基づき、図19の地図画像中の渋滞表示61、62のように、指定時刻に渋滞すると予想される道路を強調表示するようになっていてもよい。また例えば、未来の天候情報をVICSまたは他の無線通信手段(図示せず)を用いて取得し、取得した天候の情報に基づいて、図19の雨雲マーク63のように、指定時刻に降雨があると予想される領域を強調表示するようになっていてもよい。また例えば、指定時刻が夜間の場合、図20の地図のように、地図全体を暗く表示させるようになっていてもよい。
【0107】
なお、メインディスプレイ14aが表示している地図画像が現在地を含まないときは、指定時刻における交通状況、天候、外界の環境等の情報等を示す画像を、現在表示している地図画像に重畳し、指定時刻が変化しても、表示される地図の範囲を固定するようにしてもよい。
【0108】
(第2実施形態)
以下、本発明の第2実施形態について説明する。本実施形態が第1実施形態と異なるのは、本実施形態の制御回路19が、マルチ表示制御処理19eの実現のために、プログラム100に変えてプログラム300を、回転量検出装置に対して操作がある度に読み出して実行することである。そして制御回路19は、このプログラム300の実行において、まずステップ310で、ユーザによる指定時点を特定する。具体的には、回転量検出装置からの信号に基づいて、回転量検出装置が検出した物の回転量に比例する回数(以下、指定回数)を特定する。
【0109】
続いてステップ320で、当該指定回数に関連する目的地設定履歴を読み出す。ここで、目的地設定履歴とは、誘導経路算出処理19bによって走行スケジュールとしてデータ記憶部18に記録されたデータのうち、すでに過去の走行スケジュールとなっているデータをいう。また、指定回数に関連する目的地設定履歴とは、当該目的地設定履歴を走行時間帯の新しい順に数えたときの、当該指定回数番目に相当する目的地設定履歴である。
【0110】
続いてステップ330では、メータディスプレイ14cに、読み出した目的地設定履歴に関連する表示を行わせ、さらにステップ340では、メインディスプレイ14aに、読み出した目的地設定履歴に関連する表示を行わせる。なお、各ステップ330、340が終了しても、各画像表示装置14a、14cは、新たな制御を制御回路19から受けない限り、直前に受けた制御による表示を継続する。そして、ステップ330〜340の処理は短時間で終了する。したがって、ユーザにとっては、各画像表示装置14a、14cの表示は、同じ時間帯についての表示を同時に行っているように見える。
【0111】
このような制御回路19の処理により、車両用ナビゲーション装置1は、これら2つの表示装置に、同じ時間帯に関連する異なる種類の時間関連情報を表示させるので、ユーザに対して、複数の独立した画像表示装置14a〜cによる、過去に関する情報提供を、同時性をもって行うことができる。
【0112】
以下、この制御回路19のマルチ表示制御処理19eによって具体的にメータディスプレイ14cおよびメインディスプレイ14aが行う表示の内容について説明する。
【0113】
制御回路19は、回転検出装置に操作があったものの、まだ回転角度がゼロである場合、ステップ330で、メータディスプレイ14cに、図22に示すような現在時刻表示を行わせる。回転検出装置に操作があったもののまだ回転角度がゼロである場合としては、指が指回転検出装置13aに接触のみした場合がある。この現在時刻表示においては、メータディスプレイ14cは、現在時刻を示す文字および絵柄を表示する。具体的には、メータディスプレイ14cは、第1実施形態の時刻ゲージ21と同形状の時刻ゲージ80、現在時刻表示線81、現在時刻(図22の例では10時32分)を表示する文字を構成要素として有する。またこのとき、制御回路19は、ステップ340で、自車両の現在位置を含む地図をメインディスプレイ14aに表示させる。
【0114】
また、制御回路19は、ステップ110で指定回数を1回と特定した場合、ステップ330で、図23に示すように、時刻ゲージ80および現在時刻表示81に加え、その指定回数に応じた目的地設定履歴(すなわち最新の目的地設定履歴)についての、走行時間帯を示す扇形表示82、目的地を示す文字列(図23の例では小沢CC)および到着日時を示す文字(図23の例では5月27日16時15分)を含む表示を、メータディスプレイ14cに行わせる。この場合、ステップ340では、メインディスプレイ14aに、目的地周辺の地図、または、出発地から目的地までの全経路が重畳された地図を表示させる。
【0115】
ここで扇形表示82は、目的地設定履歴の走行時間帯を、当該時間帯に時計盤の短針が移動する範囲と同じ大きさの扇形で示す。そしてこの際、その扇形の外周部を黒く縁取りすることで、扇形表示82を強調する。
【0116】
また、制御回路19は、続いてステップ110で指定回数を2回と特定した場合、ステップ330で、図24に示すように、時刻ゲージ80および現在時刻表示81に加え、その指定回数に応じた目的地設定履歴についての、走行時間帯を示す扇形表示83、目的地を示す文字列(図24の例では白山公園)および到着日時を示す文字(図24の例では5月20日7時30分)を含む表示を、メータディスプレイ14cに行わせる。この場合、ステップ340では、メインディスプレイ14aに、目的地周辺の地図、または、出発地から目的地までの全経路が重畳された地図を表示させる。
【0117】
ここで扇形表示83は、目的地設定履歴の走行時間帯を、当該時間帯に時計盤の短針が移動する範囲と同じ大きさの扇形で示す。そしてこの際、その扇形の外周部を黒く縁取りすることで、扇形表示83を強調する。またこのとき、制御回路19は、図23でメータディスプレイ14cに表示させた最新の目的地設定履歴に係る扇形表示82を、その扇形表示82より小さくかつ背景等の他の表示要素を透過する画像に変化させた透過型扇形表示84に変化させる。これにより、表示画面中の、扇形表示83と透過型扇形表示84とが重なる部分においては、扇形表示83が前面に現れ、透過型扇形表示84が下に隠れる。
【0118】
以上のような制御回路19の作動により、車両用ナビゲーション装置1は、回転量検出装置が検出した回転量に基づいて、回転量が大きいほど現在時刻より遠い過去の時点(上記例では1回前、2回前とうの段階的時点)の指定を検出する。さらに車両用ナビゲーション装置1は、目的地設定履歴に基づいて、検出した指定に係る時点において走行案内が行われている対象の目的地および当該走行案内を行った時間帯を、メータディスプレイ14cに表示させる。このようにすることで、ユーザは、時計の針を動かすような感覚で、表示のための指定時点を操作することで、過去の走行スケジュールを視覚的に把握することができる。
【0119】
また、車両用ナビゲーション装置1は、時間帯の表示を、メータディスプレイ14cの円内の、当該時間帯における、時計の短針移動範囲に対応する領域の強調表示により行うようになっている。このようになっていることで、ユーザは、時計の表示に対する時間感覚を使って、当該時間帯の表示を認識することができる。
【0120】
なお、上記各実施形態において、車両用ナビゲーション装置1が、車両状態情報表示制御装置の一例に相当する。また画像表示装置14が、表示装置の一例に相当する。また、指回転検出装置13a、ダイヤル回転検出装置13b、および操作部13cのそれぞれが、回転量検出手段の一例に相当する。また、制御回路19が、プログラム100のステップ110を実行することで、時刻指定検出手段の一例として機能する。また、制御回路19が、プログラム100のステップ110またはプログラム300のステップ310を実行することで、時点指定検出手段の一例として機能する。また、制御回路19が、プログラム100のステップ120、130、140、または、プログラム300のステップ330、340を実行することで、表示制御手段の一例として機能する。また、制御回路19が、誘導経路算出処理19bまたは走行経路記録処理19dを実行することで、曲折データ取得手段の一例として機能する。また、制御回路19が、誘導経路算出処理19bを実行することで、走行時間特定手段の一例として機能する。また、制御回路19が、ステップ210を実行することで、可能経路算出手段の一例として機能する。また、制御回路19が、ステップ190を実行することで、マーク表示制御手段の一例として機能する。また、制御回路19が、経路案内処理19cを実行することで、経路案内手段として機能する。
【0121】
(他の実施形態)
以上、本発明の実施形態について説明したが、本発明の範囲は、上記実施形態のみに限定されるものではなく、本発明の各発明特定事項の機能を実現し得る種々の形態を包含するものである。
【0122】
例えば、制御回路19は、メインディスプレイ14aに、段階的に変化する指定時刻に合わせて、段階的に移動する仮想車両マークを表示させていたが、段階的に変化する指定時刻の間の時間を補完するように、指定時刻の変化よりも細かいステップで、仮想車両マークを段階的に移動させてもよい。このような作動は、例えば、ステップ146で算出したすべての仮想時間tにおける仮想位置に基づいてメインディスプレイ14aに仮想車両マークを表示させることで実現する。
【0123】
また、第1実施形態においては、制御回路19は、図16のステップ260、280で、衝突する2つの仮想位置のうち一方を消去しているが、両方を消去するようになっていてもよい。また、制御回路19は、図16のステップ260において他の仮想位置と衝突すると判定された仮想位置を、その後進行させずその判定があった時点の位置に固定するようになっていてもよい。
【0124】
また、制御回路19は、指定時刻が過去である場合、メインディスプレイ14aに、その指定時刻からスタートすれば現在時刻に現在位置にたどり着ける範囲を示すために、図16のステップ210では、道路にそって時間ΔTだけ仮想位置を後退させるようにしてもよい。このようにすることで、メインディスプレイ14aは、仮想車両マークを、指定時刻の遡り量に応じた量だけ、後退可能な道路上を後退させる(ステップ142〜149参照)。また、それら仮想車両マークは、その進行において、交差点を通過した分だけ分裂して(ステップ220、230参照)増殖する。
【0125】
また、制御回路19は、指定時刻が過去である場合、ヘッドアップディスプレイ14bに、過去の走行スケジュールに関する1次元タイムマップまたは2次元タイムマップを表示させるようになっていてもよい。この際、タイムマップは、過去の指定時刻から現在時刻までの自車両の走行履歴曲折(右折、左折等)タイミングを、直線(以下、縦軸という)上の1次元配置によって表すようになっていればよい。このとき、制御回路19は、このような過去の走行履歴に関する1次元タイムマップに、自車両の走行履歴経路から外れて周辺施設に到達するために誘導経路を外れるべきだった離脱時刻、当該誘導経路を外れるべきだった離脱方向、当該誘導経路を外れてから当該周辺施設に到達するまでにかかる離脱後走行時間等の情報を付加した2次元タイムマップを表示するようになっていてもよい。このように、曲折するタイミングの間隔を表示画面上の距離によって表すことで、ユーザは、どのぐらいの時間間隔で曲折を経たのかを、容易に視覚的に把握することができる。
【0126】
また、ヘッドアップディスプレイ14bに表示させる1次元マップおよび2次元マップにおいて、曲折方向を示す情報は、必ずしも矢印である必要はなく、例えば右、左等の文字であってもよい。
【0127】
また、制御回路19は、図7のステップ110において、回転量検出装置からの信号に基づいて、回転量検出装置が検出した物の回転量に比例する未来時間差または過去時間差を特定するようになっていてもよい。例えば90度時計回りに回転したら3時間後を、120度時計回りに回転したら4時間後を、360度反時計回りに回転したら24時間前を、それぞれ指定時刻として特定するようになっていてもよい。また、特定する検出量は、回転量検出装置の検出する回転量に比例する必要はなく、例えば、回転量のn乗(nは1より大きい値、例えば2)に比例していてもよい。すなわち、回転量が大きいほど特定する時間差が大きくなっていればよい。
【0128】
また、画像表示装置は、メインディスプレイ14a、ヘッドアップディスプレイ14b、メータディスプレイ14cに限らず、どのようなものでもよい。
【0129】
また、上記の実施形態において、メインディスプレイ14a、ヘッドアップディスプレイ14b、メータディスプレイ14cに表示させる時間関連情報の種類は、必ずしも上記の実施形態のようになっておらずともよい。
【0130】
例えば、図7のステップ120においては、制御回路19は、ヘッドアップディスプレイ14bに、指定時刻における、車両の燃料消費に関する量を表示させるようになっていてもよい。例えば、指定時刻が過去である場合、その過去の時刻または過去の時刻近傍に行われた経路案内の期間の平均燃費を、ヘッドアップディスプレイ14bに表示させる。そして、指定時刻が現在時刻である場合、現在の瞬間燃費を、ヘッドアップディスプレイ14bに表示させる。そして、指定時刻が未来である場合、その指定時刻における予想走行可能距離をヘッドアップディスプレイ14bに表示させる。なお、指定時刻における予想走行可能距離は、現在時刻における残り燃料量、現在までの平均燃費、および所定の車速(例えば時速30キロメートル)に基づいて算出してもよい。そして、このような燃料消費量に関する量をヘッドアップディスプレイ14bに表示させると同時に、メインディスプレイ14aには、指定時刻における自車両の位置(当該経路案内の経路、または経路に沿った未来の予想自車位置等)を含む地図を表示させるようになっていてもよい。
【0131】
また例えば、図7のステップ120においては、制御回路19は、ヘッドアップディスプレイ14bに、指定時刻における、車両の故障および障害に関する量を表示させるようになっていてもよい。例えば、指定時刻が過去である場合、その過去の時刻または過去の時刻近傍に行われた修理の内容をヘッドアップディスプレイ14bに表示させる。なお、この修理の内容および時刻は、修理時にデータ記憶部18または他の記憶媒体に修理作業者が記録する。そして、指定時刻が現在時刻である場合、現在のシステムチェックを行い、その結果をヘッドアップディスプレイ14bに表示させる。そして、指定時刻が未来である場合、その指定時刻における車両の誘導経路に沿った予想位置における渋滞、工事、車両規制等の障害情報をヘッドアップディスプレイ14bに表示させる。そして、このような故障および障害に関する量をヘッドアップディスプレイ14bに表示させると同時に、メインディスプレイ14aには、指定時刻における自車両の位置(当該経路案内の経路、または経路に沿った未来の予想自車位置等)を含む地図を表示させるようになっていてもよい。
【0132】
また、制御回路19がプログラム100、300を実行する代わりに、プログラム100または300の機能を実現する専用のハードウェアを車両用ナビゲーション装置1が備えるようになっていてもよい。
【図面の簡単な説明】
【0133】
【図1】本発明の第1実施形態に係る車両用ナビゲーション装置1のハードウェア構成図である。
【図2】車両用ナビゲーション装置1が有する指回転検出装置13aの構成を示す図である。
【図3】車両用ナビゲーション装置1が有するダイヤル回転検出装置13bの構成を示す図である。
【図4】車両用ナビゲーション装置1が有するリューズ回転検出装置13cの構成を示す図である。
【図5】車両用ナビゲーション装置1が有するリューズ回転検出装置13cの構成を示す図である。
【図6】制御回路19の制御回路19が実行する処理を示す図である。
【図7】制御回路19が実行するプログラム100のフローチャートである。
【図8】予定スケジュールがある場合のメータディスプレイ14cの表示例である。
【図9】予定スケジュールがない場合のメータディスプレイ14cの表示例である。
【図10】ヘッドアップディスプレイ14bに表示させる1次元タイムマップの表示例である。
【図11】ヘッドアップディスプレイ14bに表示させる1次元タイムマップの表示例である。
【図12】ヘッドアップディスプレイ14bに表示させる2次元タイムマップの表示例である。
【図13】プログラム100のステップ140の詳細なフローチャートである。
【図14】ルートスクロールにおいてメインディスプレイ14aに表示させる地図画像である。
【図15】到達地点郡表示においてメインディスプレイ14aに表示させる地図画像である。
【図16】到達地点群表示のためにステップ146で制御回路19が実行する処理のフローチャートである。
【図17】仮想車両マーク53、54、55のバリエーションを示す図である。
【図18】到達地点郡表示においてメインディスプレイ14aに表示させる地図画像である。
【図19】メインディスプレイ14aが表示する、未来の交通状況を地図に重畳させた画像である。
【図20】メインディスプレイ14aが表示する、未来の交通状況および車両の外界の状況を地図に重畳させた画像である。
【図21】第2実施形態において、制御回路19がマルチ表示制御処理19eのために実行するプログラム300のフローチャートである。
【図22】第2実施形態においてメータディスプレイ14cに表示させる画像を示す図である。
【図23】第2実施形態においてメータディスプレイ14cに表示させる画像を示す図である。
【図24】第2実施形態においてメータディスプレイ14cに表示させる画像を示す図である。
【符号の説明】
【0134】
1…車両用ナビゲーション装置、11…位置検出器、12…音声出力装置、
13…操作部、13a…指回転検出装置、13b…ダイヤル回転検出装置、
13c…リューズ回転検出装置、14…画像表示装置、14a…メインディスプレイ、
14b…ヘッドアップディスプレイ、14c…メータディスプレイ、
15…VICS受信機、16…RAM、17…ROM、18…データ記憶部、
19…制御回路、19a…現在位置特定処理、19b…誘導経路算出処理、
19c…経路案内処理、19d…走行経路記録処理、19e…マルチ表示制御処理、
20…画面中心、21…時刻ゲージ、22…現在時刻表示線、
23…現在時刻表示文字、24、25…スケジュール表示、
26、27…スケジュール期間表示線、28…指定時刻表示線、
37…周辺施設マーク、41、51…現在地マーク、42…誘導経路、
43、52、53、55…仮想車両マーク、61、62…渋滞表示、
63…雨雲マーク、80…時刻ゲージ、81…現在時刻表示線、
82、83…扇形表示、84…透過型扇形表示、100、300…プログラム、
130…上部カバー、131…指検出部、132…稜部、134…目盛り、
135…中央部、136…回転部、136a…非透過部、136b…透過部、
137…軸受部、138…つまみ部、139…軸部。
【技術分野】
【0001】
本発明は、車両状態情報表示制御装置および車両状態情報表示制御用のプログラムに関する。
【背景技術】
【0002】
従来、車両の未来の予定走行経路、過去の走行経路等、車両の状態に関する過去または未来の情報の表示を行う装置が種々提案されている。例えば、特許文献1および2には、所定時間後の車両の予想走行経路を地図に重畳して表示する技術が開示されている。また、特許文献3には、車両の過去の走行経路および予想経路を地図上に表示すると共に、ボタンの押下に基づいて車両を当該経路に沿って過去または未来に移動させる技術が開示されている。また、特許文献4には、入力された希望到着時刻に合わせて目的地に到着できるように経由地を選択して、当該経由地を経由する目的地への経路を表示する技術が開示されている。また、特許文献5には、所定時間後の予測交通状況を地図に重畳して表示する技術が開示されている。
【特許文献1】特開平7−296148号公報
【特許文献2】特開平11−16094号公報
【特許文献3】特開平11−202759号公報
【特許文献4】特開2000−346667号公報
【特許文献5】特開2005−134429号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
本発明は、今までにない新規な手法で過去または未来の情報を表示する技術を提供することを目的とする。
【課題を解決するための手段】
【0004】
上記目的を達成するための本発明の特徴は、人が移動するとき最も重要視する傾向がある時間に関連させて車両の情報表示を行うことである。
【0005】
請求項1に記載の発明においては、車両状態情報表示制御装置が、物の回転運動の量を検出し、検出した回転量に基づいて、当該回転量が大きいほど現在時刻より遠い過去または遠い未来の時刻の指定を検出する。そしてこの車両状態情報表示制御装置は、検出した指定に係る指定時刻と車両の状態との関連を示す時間関連情報を当該車両内の表示装置に表示させる。
【0006】
このように、車両状態情報表示制御装置が表示させる時間関連情報は、検出した回転運動の量の増大に応じて現在時刻より遠ざかる時刻に関するものとなる。このようにすることで、ユーザは、時計の針を動かすような感覚で、表示のための指定時刻を操作することができる。なお、物は、人の指であってもよいし、回転量検出手段の一部品であってもよい。また、指定時刻と車両状態との関連を示す時間関連情報としては、例えば、現在時刻から指定時刻までの車両の経路中の曲折予定、および、指定時刻における車両の予想到達位置等がある。
【0007】
また、車両状態情報表示制御装置は、請求項2に記載のように、車両の現在または未来の走行経路上の複数の曲折点における曲折方向およびこれら複数の曲折点間の走行時間のデータを取得するようになっていてもよい。この場合、車両状態情報表示装置は、取得した複数の曲折点における曲折方向をそれぞれ表す複数の曲折情報のうち、指定時刻を含む基準時間範囲内に車両が通過する曲折点の曲折情報を、当該曲折点の通過時刻順に並べて画像表示装置の表示画面に表示させ、かつ、表示画面において、隣り合う曲折情報間の距離を、それら曲折点間の走行時間が長いほど長くなるようにしてもよい。このとき、基準時間範囲は、指定時刻と現在時刻との時間差が大きくなるほど、より長くなっていてもよい。
【0008】
このように、曲折するタイミングの間隔を表示画面上の距離によって表すことで、ユーザは、どのぐらいの時間走行すれば曲折することになるのかを、あるいは、どのぐらいの時間間隔で曲折を経たのかを、容易に視覚的に把握することができる。
【0009】
また、請求項3に記載のように、車両状態情報表示制御装置は、現在位置から指定時刻までに到達可能な複数の可能到達点を、表示画面の地図上に複数表示させるようになっていてもよい。このようになっていることで、ユーザは、指定した時刻までに現在位置からどこまで走行できるか、あるいは現在位置に指定時刻以内に到達できる範囲がどのようになっているかを、視覚的に把握することができるようになる。
【0010】
また、請求項4に記載の発明においては、車両状態情報表示制御装置が、過去または未来の時刻の指定を検出し、検出した指定に係る指定時刻と車両の第1種の状態との関連を示す第1の時間関連情報を車両内の第1の表示装置に表示させると共に、当該指定時刻と車両の第2種の状態との関連を示す第2の時間関連情報を車両内の第2の表示装置に表示させる。この第1の表示装置と第2の表示装置とは分離している。
【0011】
このようになっていることで、車両状態情報表示制御装置は、2つの表示装置に同じ指定時刻についての異なる種類の時間関連情報を表示させるので、ユーザに対して過去または未来に関する複数の情報提供を、同時性をもって行うことができる。
【0012】
また、請求項5に記載の発明においては、経路上の複数の曲折点における曲折方向および複数の曲折点間の走行時間のデータを取得し、取得した複数の曲折点における曲折方向をそれぞれ表す複数の曲折情報を、曲折点の通過時刻順に並べて画像表示装置の表示画面に表示させる。さらに車両状態情報表示制御装置は、当該表示画面において、隣り合う曲折情報間の距離を、それら曲折点間の走行時間が長いほど長くなるようにする。
【0013】
このように、曲折するタイミングの間隔を表示画面上の距離によって表すことで、ユーザは、どのぐらいの時間走行すれば曲折することになるのかを、あるいは、どのぐらいの時間間隔で曲折を経たのかを、容易に視覚的に把握することができる。
【0014】
また、請求項6に記載のように、車両状態情報表示制御装置は、曲折情報を、曲折点の通過時刻順に一直線に並べて表示させてもよい。そしてこのとき、曲折情報は、当該曲折点における進入前後の曲折方向の相対変化(例えば右折、左折)を視覚的に表示する絵柄であってもよい。このようになっていることで、ユーザは、その曲折点においてどちらに曲がることになっているのかを、あるいはどちらに曲がったのかを、さらに容易に把握することができる。
【0015】
また、請求項7に記載のように、車両状態情報表示制御装置は、当該経路上の複数の分岐点のそれぞれまでの走行時間(以下、それぞれ第1種走行時間という)およびこれら複数の分岐点のそれぞれから、当該分岐点に対応する当該経路外の地点までの走行時間(以下、それぞれ第2種走行時間という)を特定するようになっていてもよい。このとき、車両状態情報表示制御装置は、同じ分岐点に対応する第1種走行時間と第2種走行時間を2つの成分とする複数の位置を、表示画面における2次元座標面上のマークとして表示させるようになっていてもよい。
【0016】
このようになっていることで、ユーザは、自車両がいつ分岐するか(またはいつ分岐したか)についての情報と、分岐してから当該地点までどれくらい走行するか(またはどれくらい走行したか)についての情報を、2次元的に把握することができる。
【0017】
また、請求項8に記載の発明においては、車両状態情報表示制御装置が、分岐点までの第1の経路上の第1の走行時間および当該分岐点から第2の地点までの第2の経路上の第2の走行時間を特定し、当該第1の走行時間および第2の走行時間の2つの成分から成る位置を、画像表示装置の表示画面における2次元座標面上のマークとして表示させる。
【0018】
このようになっていることで、ユーザは、自車両がいつ分岐するか(またはいつ分岐したか)についての情報と、分岐してから当該地点までどれくらい走行するか(またはどれくらい走行したか)についての情報を、2次元的に把握することができる。
【0019】
また、請求項9に記載の発明においては、車両状態情報表示制御装置が、過去または未来の時刻の指定を検出し、画像表示装置の表示画面内において、現在位置から到達可能な道路上に複数のマークを表示させると共に、繰り返し時刻を増加させ、その繰り返しの各回において、複数のマークのそれぞれを、当該時刻の増加に応じた走行距離だけ道路上を進行させる。このようになっていることで、車両状態情報表示制御装置は、車両の走行可能な経路を時系列順に段階的に複数表示させることができる。
【0020】
また、請求項10に記載のように、車両状態情報表示制御装置は、当該複数のマークの1つを進行させた結果、当該1つのマークが交差点を通過したことに基づいて、当該交差点から分岐する道路で、かつ当該マークが通っていない道路に、当該複数のマークに新たに属するマークとして、新たなマークを生成するようになっていてもよい。このようになっていることで、車両状態情報表示制御装置は、道路が分岐しても、分岐によって生じた道路毎に、その道路において時系列順かつ段階的に進行するマークを表示させることができる。
【0021】
さらに、請求項11に記載のように、車両状態情報表示制御装置は、当該複数のマークのうち2つのマークが衝突することに基づいて、当該2つのマークのうち1つ以上を表示画面から消去させるようになっていてもよい。2つのマークが衝突するということは、その衝突地点から見てどちらの方向にもマークが通ったことを意味している。したがって、これらのマークを消去することで、既に他のマークが通った経路を他のマークが再度通る可能性を低減することができる。なお、2つのマークが衝突するとは、現に衝突したこと、同じ道路をすれ違ったこと、不可避的に衝突またはすれ違う運命にあること、のいずれをも含む概念である。
【0022】
また、請求項12に記載のように、車両状態情報表示制御装置は、これら複数のマークの1つを進行させた結果、当該1つのマークが現在地点に近づいたことに基づいて、当該マークを表示画面から消去させるようになっていてもよい。このようになっていることで、車両状態情報表示制御装置は、現在地点から遠ざかる方向への経路を通って到達できる地点を表示させることができる。
【0023】
また、請求項13に記載の発明においては、車両状態情報表示制御装置は、過去または未来の時刻の指定を検出し、現在位置から検出した指定に係る時刻までに走行可能な複数の可能経路を複数算出する。さらに車両状態情報表示制御装置は、画像表示装置の表示画面内において、当該複数の可能経路の端部に相当する複数の位置に複数のマークを表示させると共に、当該複数のマークのそれぞれの表示態様を、当該マークに対応する可能経路に基づいて制御する。
【0024】
このようになっていることで、ユーザは、指定した時刻までに現在位置からどこまで走行できるか、あるいは現在位置に指定時刻以内に到達できる範囲がどのようになっているかを、容易に視覚的に把握することができるようになる。さらに、各マークが走行した経路がどのようなものであるかについても、視覚的に把握できるようになる。
【0025】
また、請求項14の発明においては、過去または未来の時刻の指定を検出し、現在位置から検出した指定に係る時刻までに走行可能な複数の可能経路を複数算出するようになっている。さらに、車両状態情報表示制御装置は、画像表示装置の表示画面内において、当該複数の可能経路の端部に相当する複数の位置に複数のマークを表示させると共に、当該複数のマークのうち1つを指定するユーザの操作があったことに基づいて、当該複数の経路のうち、現在位置から当該1つのマークまでの経路を表示させる。
【0026】
このようになっていることで、ユーザは、指定した時刻までに現在位置からどこまで走行できるか、あるいは現在位置に指定時刻以内に到達できる範囲がどのようになっているかを、容易に視覚的に把握することができるようになる。さらに、指定したマークが走行した経路がどのようなものであるかについて、視覚的に把握できるようになる。
【0027】
また、請求項15に記載の発明においては、車両状態情報表示制御装置が、過去または未来の時刻の第1の指定を検出し、第1の指定に係る時刻までに現在位置から走行可能な複数の経路(以下、それぞれ第1種可能経路という)を複数算出する。さらに、車両状態情報表示制御装置は、画像表示装置の表示画面内において、当該複数の第1種可能経路の端部に相当する複数の位置に複数のマークを表示させる。またさらに、車両状態情報表示制御装置は、過去または未来の時刻の第2の指定を検出し、さらに、当該複数のマークのうちいずれか1つのマークの位置から、検出した前記第2の指定に係る時刻までに走行可能な複数の経路(以下、それぞれ第2種可能経路という)を複数算出する。そして、車両状態情報表示制御装置は、画像表示装置の表示画面内において、当該複数の第2種可能経路の端部に相当する複数の位置に複数のマークを表示させる。
【0028】
このようになっていることで、ユーザは、指定した時刻までに現在位置からどこまで走行できるか、あるいは現在位置に指定時刻以内に到達できる範囲がどのようになっているかを、容易に視覚的に把握することができるようになる。さらに、ユーザは、第1の指定にかかる時間経過後の地点からさらに第2の指定に係る時間だけ移動することによって到達できる範囲を容易に視覚的に把握することができる。
【0029】
また、請求項16に記載の発明において、車両状態情報表示制御装置は、ユーザ操作に基づいて設定された目的地への経路の走行案内を行うと共に、目的地と走行案内を行った時間帯とを関連付けて記録する。そして、車両状態情報表示制御装置は、物の回転運動の量を検出し、検出した回転量に基づいて、回転量が大きいほど現在時刻より遠い過去の時点の指定を検出する。さらに車両状態情報表示制御装置は、記録した上記情報に基づいて、検出した指定に係る時点において走行案内が行われている対象の目的地および当該走行案内を行った時間帯を、画像表示装置に表示させる。このようにすることで、ユーザは、時計の針を動かすような感覚で、表示のための指定時点を操作することで、過去の走行スケジュールを視覚的に把握することができる。
【0030】
また、請求項17に記載のように、車両状態情報表示制御装置は、時間帯の表示を、円内の、当該時間帯における、時計の短針移動範囲に対応する領域の強調表示により行うようになっていてもよい。このようになっていることで、ユーザは、時計の表示に対する時間感覚を使って、当該時間帯の表示を認識することができる。
【0031】
また、請求項18に記載のように、請求項1に記載の発明を、プログラムとして捉えることもできる。このようなプログラムを実行することで、請求項1と同様の効果を得ることができる。また、請求項19に記載のように、請求項4に記載の発明を、プログラムとして捉えることもできる。このようなプログラムを実行することで、請求項4と同様の効果を得ることができる。また、請求項20に記載のように、請求項5に記載の発明を、プログラムとして捉えることもできる。このようなプログラムを実行することで、請求項5と同様の効果を得ることができる。また、請求項21に記載のように、請求項8に記載の発明を、プログラムとして捉えることもできる。このようなプログラムを実行することで、請求項8と同様の効果を得ることができる。また、請求項22に記載のように、請求項9に記載の発明を、プログラムとして捉えることもできる。このようなプログラムを実行することで、請求項9と同様の効果を得ることができる。また、請求項23に記載のように、請求項13に記載の発明を、プログラムとして捉えることもできる。このようなプログラムを実行することで、請求項13と同様の効果を得ることができる。また、請求項24に記載のように、請求項14に記載の発明を、プログラムとして捉えることもできる。このようなプログラムを実行することで、請求項14と同様の効果を得ることができる。また、請求項25に記載のように、請求項15に記載の発明を、プログラムとして捉えることもできる。このようなプログラムを実行することで、請求項15と同様の効果を得ることができる。また、請求項26に記載のように、請求項16に記載の発明を、プログラムとして捉えることもできる。このようなプログラムを実行することで、請求項16と同様の効果を得ることができる。
【発明を実施するための最良の形態】
【0032】
(第1実施形態)
以下、本発明の第1実施形態について説明する。図1に、本実施形態に係る車両用ナビゲーション装置1のハードウェア構成を示す。この車両用ナビゲーション装置1は、位置検出器11、音声出力装置12、操作部13、画像表示装置14、VICS受信機15、RAM16、ROM17、データ記憶部18、および制御回路19を有している。
【0033】
位置検出器11は、いずれも周知の図示しない地磁気センサ、ジャイロスコープ、車速センサ、およびGPS受信機等のセンサを有しており、これらセンサの各々の性質に基づいた、車両の現在位置や向きを特定するための情報を制御回路19に出力する。音声出力装置12は、音声回路およびスピーカを有する。音声回路は、制御回路19から受けた音声データに基づく音声信号をスピーカに出力する。
【0034】
操作部13は、車両用ナビゲーション装置1に設けられた複数のメカニカルスイッチ、画像表示装置14の表示面に重ねて設けられたタッチパネル等の入力装置から成り、ユーザによるメカニカルスイッチの操作およびタッチパネルのタッチに基づいた信号を制御回路19に出力する。操作部13は、物の回転運動の量(例えば回転角、回転角速度)を検出する回転量検出装置を有している。
【0035】
回転量検出装置としては、例えば、図2に示す指回転検出装置13a、図3に示すダイヤル回転検出装置13b、図4および図5に示すリューズ回転検出装置13cのいずれかを採用してもよい。
【0036】
指回転検出装置13aは、例えば車両のドライバー席の脇に設置され、図2の上面図に示すように、可視光線を遮蔽して赤外線を透過する樹脂からなる円形の上部カバー130と、その上部カバー130の直下にある12個の指検出部131a〜m、および図示しない検出回路等を有している。
【0037】
操作部13の上部には、操作部13の中央から外縁まで真っ直ぐ伸びる一本の稜部132が固定されている。そして操作部13は、図示しないモータ等の回転機構によって、当該中央を軸として、12時間に一周のスピードで等速回転する。これにより、稜部132は、時計盤上の短針のように、現在時刻を示す。
【0038】
指検出部131a〜mは、車体に対して動かないように、上部カバー130の中央部を取り囲むように、円環状に配置されている。これら指検出部131a〜mのぞれぞれは、赤外線を上部カバー130の方向に投射する装置、および、上部カバー130の方向から入射する赤外線量を検出するフォトダイオード等のセンサを有している。人の指が上部カバー130の外周部の一部に近づくと、その一部の直下にある指検出部131から投射された赤外線が指で反射される。その反射光は、当該指検出部131のセンサによって検出される。このように、指検出部131a〜mのそれぞれは、指によって反射された赤外線を検出することで、それぞれの上方に指があることを検出する。
【0039】
このような指回転検出装置13aの上部カバー130を、その外周に沿って指でなぞると、指回転検出装置13aの検出回路は、指検出部131a〜mによる指の検出の時間変化に基づいて、その指の移動量および移動方向、すなわち、上部カバー130の中央の周りの指の回転角および回転方向を検出し、その検出結果を制御回路19に出力する。
【0040】
ダイヤル回転検出装置13bは、例えば車両のドライバー席の脇に設置され、図3の上面図に示すように、中央部135、中央部135をとり囲む回転部136、回転部の直下にある底部(図示せず)、検出回路(図示せず)等を有している。
【0041】
回転部136は、可視光線を透過しない樹脂から成る円弧状の非透過部136aと、可視光線を透過する樹脂から成る円弧状の透過部136bとを、各円弧の端部において互いに繋ぎ合わせることで生成される。この回転部136は、中央部135の周りの一部角度範囲(あるいは全角度範囲)で回転可能となっている。ダイヤル回転検出装置13bの底部の外周付近には、中央部135を中心として円環上に等間隔に配置された複数個の目盛り(例えば目盛り134)が設けられている。
【0042】
回転部136をユーザが指で回転させると、検出回路がその回転角度および回転方向を検出し、検出した回転角度および回転方向を示す信号を制御回路19に出力する。回転部136が回転すると、底部の目盛りのうち、透過部136bに隠される部分が変化する。この変化により、ユーザは、回転部136の回転角を視覚的に把握することが容易になる。また、目盛りが時計盤の目盛りと同じ様式の配置となっているので、ユーザが容易に回転角を時間に見立てることができる。
【0043】
リューズ回転検出装置13cは、例えば車両のドライバー席の脇に設置され、図4および図5に示す通り、車体に固定される軸受部137、ユーザの操作を受けて回転するつまみ部138、つまみ部138に固定される軸部139、検出回路等を有している。軸部139はつまみ部138の回転軸に沿って設けられている。また、軸受部137の中心には、軸部139をちょうど挿入できる大きさの穴が設けられている。検出回路は、図4に示すようにつまみ部138が軸受部137の方向に押し込まれている状態においては、つまみ部138の矢印方向への回転角を検出し、その回転角が大きくなるほど大きい分刻みの時間変化を示す信号を、回転方向の信号と共に制御回路19に出力する。また検出回路は、図5に示すようにつまみ部138が軸受部137から所定量だけ引き出されている状態においては、つまみ部138の矢印方向への回転角を検出し、その回転角が大きくなるほど大きい、分刻みよりも細かい秒刻みの時間変化を示す信号を、回転方向の信号と共に制御回路19に出力する。
【0044】
画像表示装置14は、制御回路19から出力された信号に基づいた映像をユーザに表示する。具体的には、画像表示装置14は、互いに離れた位置に設けられたメインディスプレイ14a、ヘッドアップディスプレイ14b、およびメータディスプレイ14cを有している。
【0045】
メインディスプレイ14aは、車両のダッシュボード内またはダッシュボード上等の位置に配置される画像表示装置である。ヘッドアップディスプレイ14bは、車両のフロントガラスに映像を投影することで、ユーザがフロントガラス越しの前方の風景と共に当該映像を見ることができるようにする装置である。メータディスプレイ14cは、速度メータ等のメータ類が配置される位置に配置される画像表示装置である。本実施形態においては、このメータディスプレイ14cの表示画面は円形となっている。
【0046】
VICS受信機15は、道路沿いに設置された路上機から無線送信された道路の渋滞情報、交通規制情報等を受信して制御回路19に出力する無線受信機である。
【0047】
データ記憶部18は、DVD、CD、HDD等の不揮発性の記憶媒体およびそれら記憶媒体に対してデータの読み出し(および可能ならば書き込み)を行う装置から成り、制御回路19が実行するプログラム、経路案内用の地図データ等を記憶している。
【0048】
地図データは、リンクおよびノードの位置、属性(車幅、制限速度、高速道路か一般道路か等)、ノードとリンクとの接続関係情報等を含む道路データ、および施設データを有している。施設データは、施設毎のエントリを複数有しており、各エントリは、対象とする施設の名称情報、所在位置情報、施設種類情報等を示すデータを有している。
【0049】
制御回路(コンピュータに相当する)19は、ROM17およびデータ記憶部18から読み出した車両用ナビゲーション装置1の動作のためのプログラムを実行し、その実行の際にはRAM16、ROM17、およびデータ記憶部18から情報を読み出し、RAM16およびデータ記憶部18に対して情報の書き込みを行い、位置検出器11、音声出力装置12、操作部13、および画像表示装置14と信号の授受を行う。
【0050】
図6に、この制御回路19がプログラムを実行することによって行う具体的な処理の一部を示す。この図に示す通り、制御回路19が実行する処理としては、現在位置特定処理19a、誘導経路算出処理19b、経路案内処理19c、走行経路記録処理19d、マルチ表示制御処理19e等がある。
【0051】
現在位置特定処理19aは、位置検出器11からの信号に基づいて、周知のマップマッチング等の技術を用いて車両の現在位置や向きを特定する処理である。
【0052】
誘導経路算出処理19bは、操作部13からユーザによる目的地の入力を受け付け、現在位置から当該目的地までの最適な誘導経路を算出する処理である。また、誘導経路算出処理19bにおいて、制御回路19は、誘導経路上の各リンクを走行する時間帯を算出する。なお、この時間帯の算出においては、車両は所定の一定速度(例えば時速20キロメートル)で走行するものとして算出するようになっていてもよい。また、制御回路19は、誘導経路上のリンク毎に、そのリンクの属性(車幅、制限速度、高速道路か一般道路か等)を地図データまたはVICS受信機15からの信号に基づいて特定し、その特定した結果に基づいて各リンクの走行速度を推定し、その推定結果を当該時間帯の算出に用いるようになっていてもよい。
【0053】
また、誘導経路算出処理19bにおいて制御回路19は、ユーザが目的地の入力と共に出発地点および予定出発時刻(すなわち現在時刻より未来の時刻)の入力を行った場合、目的地までの誘導経路および誘導経路上の各リンクの走行時間帯を、当該予定出発時刻に車両が出発地点から走行を開始するものとして、算出する。そして、算出した誘導経路および走行時間帯を、走行予定スケジュールとしてデータ記憶部18に記録する。
【0054】
また、誘導経路算出処理19bにおいて制御回路19は、誘導経路上から外れて周辺施設へ向かうための離脱経路およびその離脱経路を周辺施設まで走行するまでにかかる走行時間を算出する。ここで、周辺施設とは、誘導経路周辺の特定の属性(例えばコンビニエンスストア、ガソリンスタンド、レストラン)を有する複数の施設をいう。
【0055】
経路案内処理19cは、データ記憶部18から地図データを読み出し、算出された誘導経路、目的地、経由地および現在位置等をこの地図データの示す地図上に重ねた画像を、メインディスプレイ14aに表示させ、案内交差点の手前に自車両が到達したとき等の必要時に、右折、左折等を指示する案内音声を音声出力装置12に出力させる処理である。また、経路案内処理19cにおいて、制御回路19は、目的地と、その目的地への誘導経路上の走行案内を行った時間帯とを関連付けて、データ記憶部18に記録する。
【0056】
走行経路記録処理19dは、現在位置特定処理19aによって特定した現在位置と現在日時とを関連付けた軌跡データを、データ記憶部18に繰り返し(例えば10秒周期で定期的に)記録する処理である。
【0057】
マルチ表示制御処理19eは、メインディスプレイ14a、ヘッドアップディスプレイ14b、メータディスプレイ14cのそれぞれに、同じ指定時刻についての異なる種類の時間関連情報を同時に表示させるための処理である。制御回路19は、このマルチ表示制御処理19eを実行するために、図7に示すプログラム100を繰り返し読み出して実行する。
【0058】
制御回路19は、プログラム100の1回分の実行において、まずステップ110では、ユーザによる指定時刻を特定する。具体的には、回転量検出装置からの信号に基づいて、回転量検出装置が検出した物の回転量に対して正の相関関係を有する未来時間差または過去時間差を特定し、その時間差を現在時刻に適用した結果の時刻を、指定時刻として特定する。
【0059】
例えば、ユーザが指回転検出装置13a、ダイヤル回転検出装置13b、リューズ回転検出装置13c等の回転量検出装置に対してある角度の回転操作(すなわち、指や部材等の物を回転させる操作)を行い、その角度を保持し続けると、制御回路19はその間、ステップ110の実行の度に、指定時刻をその角度に応じた量だけ増加または減少させる。指回転検出装置13aにおいては、ユーザが指で上部カバー130を円弧を描くように時計回りになぞってそのまま指を止めると、その指が上部カバー130から離れるまで、その円弧が中心に対して張る角度が大きいほど大きい量だけ、ステップ110の実行の度に増加させる。また、ユーザが指で上部カバー130を円弧を描くように反時計回りになぞってそのまま指を止めると、その指が上部カバー130から離れるまで、その円弧が中心に対して張る角度に応じた量だけ、ステップ110の実行の度に減少させる。
【0060】
回転角度と指定時刻の増加量の関係は、正の相関関係である、例えば、上述の円弧の角度が指検出部131の1個分に相当する場合増加量を1分とし、角度が指検出部131の3個分に相当する場合増加量を3分とし、角度が指検出部131の5個分に相当する場合増加量を30分とし、角度が指検出部131の9個分に相当する場合増加量を1時間とし、角度が指検出部131の11個分に相当する場合増加量を12時間とする。
【0061】
また、ユーザが回転量検出装置の状態を元に戻した状態が所定時間(例えば30秒)続くと、その後制御回路19はステップ110で指定時刻と現在時刻と同一時刻にする。回転量検出装置の状態を元に戻した状態とは、指回転検出装置13aから指を離した状態、ダイヤル回転検出装置13b、リューズ回転検出装置13cの回転を初期位置に戻した場合等がある。
【0062】
続いてステップ120では、メータディスプレイ14cに、当該指定時刻に関連する表示を行わせ、さらにステップ130では、ヘッドアップディスプレイ14bに、当該指定時刻に関連する表示を行わせ、さらにステップ140では、メインディスプレイ14aに、当該指定時刻に関連する表示を行わせる。なお、各ステップ120、130、140が終了しても、各画像表示装置14c、14b、14aは、新たな制御を制御回路19から受けない限り、直前に受けた制御による表示を継続する。そして、ステップ110〜140の1回分の処理は短時間で終了する。したがって、ユーザにとっては、各画像表示装置14a、14b、14cの表示は、同じ時刻についての表示を同時に行っているように見える。
【0063】
このような制御回路19の処理により、車両用ナビゲーション装置1は、これら3つの表示装置に、同じ指定時刻に関連する異なる種類の時間関連情報を表示させるので、ユーザに対して、複数の独立した画像表示装置14a〜cによる、過去または未来に関する情報提供を、同時性をもって行うことができる。
【0064】
以下、この制御回路19のマルチ表示制御処理19eによって具体的に画像表示装置14が行う表示の内容について説明する。
【0065】
(i)メータディスプレイ14cによる未来時刻表示:
制御回路19は、ステップ110で特定した指定時刻が未来の時刻である場合、ステップ120において、メータディスプレイ14cに、図8、図9に示すようなスケジューラを表示させる。このスケジューラは、自車両の未来のスケジュール、指定時刻、および現在時刻の間の時間関係を、時計盤を模した形式で表す。具体的には、スケジューラは、時刻ゲージ21、現在時刻表示線22、現在時刻を表示する文字23、スケジュール表示24、25、スケジュール期間表示線26、27、および指定時刻表示線28等の画像を構成要素として有する。
【0066】
時刻ゲージ21は、メータディスプレイ14cの円形の表示画面の外縁と同心かつやや小さい円と、その円上に等間隔に刻まれた12個の目盛り線とを有する。現在時刻表示線22は、メータディスプレイ14cの表示画面の中心20から時刻ゲージ21上の一点まで伸びる線分であり、その線分の方向により現在時刻を表す。例えば、図8、図9においては、現在時刻表示線22は5時の方向に伸びている。
【0067】
スケジュール表示24、25のぞれぞれは、自車両の未来のスケジュールにおける目的地および目的地への到着予想時刻を示す。自車両の未来のスケジュールは、誘導経路算出処理19bによって記録された走行スケジュール、または誘導経路算出処理19bによって特定された現在位置から目的地までの走行スケジュールである。この目的地は文字によって表示され、この到着予想時刻は、画面中心20から見た当該文字の方向によって表示される。
【0068】
スケジュール期間表示線26、27のそれぞれは、時刻ゲージ21よりやや小さい半径の円弧であり、その始点の画面中心20から見た方向が、走行スケジュールにおける出発予定時刻を示し、その終点の画面中心20から見た方向が、当該スケジュールにおける到着予想時刻を示している。すなわち、円弧の長さが、走行スケジュールにおける予想走行期間を示している。
【0069】
指定時刻表示線28は、メータディスプレイ14cの表示画面の中心20から時刻ゲージ21上の一点まで伸びる線分であり、その線分の方向により直前のステップ110で特定した指定時刻を表す。このような表示により、ユーザは、現在時刻、指定時刻、および予定走行スケジュールの時間的関係を、時計盤を見る感覚で把握することができる。なお、図9は、ユーザがメータディスプレイ14cに指を触れた直後のメータディスプレイ14cの表示である。この場合、指定時刻と現在時刻とが一致し、時刻ゲージ21と指定時刻表示線28とは重なるか、あるいは、指定時刻表示線28は表示されない。また、予定スケジュールが記録されていない場合は、制御回路19は、図8および図9の場合に比べてスケジュール表示もスケジュール期間表示線もメータディスプレイ14cに表示させない。
【0070】
(ii)ヘッドアップディスプレイ14bによる未来時刻表示:
制御回路19は、ステップ110で特定した指定時刻が未来の時刻である場合、ステップ130において、ヘッドアップディスプレイ14bに、図10、図11に示すような1次元タイムマップを表示させる。この1次元タイムマップは、現在時刻から指定時刻までの、自車両の未来のスケジュールにおける曲折(右折、左折等)タイミングを、直線(以下、縦軸という)上の1次元配置によって表す。
【0071】
例えば、指定時刻が10分後以下である場合、制御回路19は、図10に示すように、現在時刻から10分後までの時間を1分間隔で表示画面の縦方向に表す目盛りと、その目盛りに合わせて車両の曲折タイミングの1つを表す矢印31と、当該曲折タイミングにおける曲折点(例えば交差点)の名称(具体的にはTakanodai 4.)を、ヘッドアップディスプレイ14bに表示させる。矢印31は、先端付近がほぼ直角に折れ曲がった形状を有しており、その折れ曲がり部分に相当する位置の表示画面中の高さが曲折タイミングを表し、その折れ曲がった部分の後ろに続く直線部分の長さが、曲折タイミングまでの連続直進時間を表している。また、折れ曲がりの方向が、その曲折点における自車両の相対的な折れ曲がり方向(右、左等)を表している。
【0072】
また例えば、指定時刻が10分後を越え1時間後以内である場合、制御回路19は、図11に示すように、図10に比べて表示時間範囲を拡大して、現在時刻から1時間後までの時間を10分間隔で表示画面の縦方向に表す目盛りと、その目盛りに合わせて車両の曲折タイミングをそれぞれ表す矢印31〜35と、当該曲折タイミングにおける曲折点(例えば交差点)の名称を、ヘッドアップディスプレイ14bに表示させる。各矢印31〜35の折れ曲がり部分の後ろに続く直線部分は、縦軸上に一直線に縦に並べられている。そして、その矢印31〜35の直線部分の長さは、当該矢印31〜35が示す曲折タイミングの直前までの連続直進時間に比例する。
【0073】
このように、曲折するタイミングの間隔を表示画面上の距離によって表すことで、ユーザは、どのぐらいの時間走行すれば曲折することになるのかを容易に視覚的に把握することができる。このように、矢印31〜35が縦に積み重なるように表示されるので、ユーザが総走行時間を把握し易くなる。
【0074】
また、制御回路19は、ステップ110で特定した指定時刻が未来の時刻であり、かつ、周辺施設表示制御を行う場合、ステップ130において、ヘッドアップディスプレイ14bに、図12に示すような2次元タイムマップを表示させる。ここで、周辺施設表示制御とは、出発地(例えば現在地)から目的地までの誘導経路の周辺施設の情報をヘッドアップディスプレイ14bに表示させることをいう。周辺施設表示制御を行うか否かは、ユーザによる操作部13を用いた設定操作に基づいてあらかじめ決定していてもよい。
【0075】
この2次元タイムマップは、上述の1次元タイムマップに、自車両の予定走行経路から外れて周辺施設に到達するために誘導経路を外れるべき離脱時刻、当該誘導経路を外れるべき離脱方向、当該誘導経路を外れてから当該周辺施設に到達するまでにかかる離脱後走行時間等の情報を付加したものである。具体的には、2次元タイムマップにおいては、制御回路19は、複数の周辺施設のそれぞれを表す周辺施設マーク37、39を、当該周辺施設の離脱時刻を縦軸の成分とし、当該周辺施設の離脱後走行時間を横軸の成分とした位置にプロットする。ここで、縦軸から右方向の時間は、右折後の時間を表し、縦軸から左方向の時間は、左折後の時間を表す。また、制御回路19は、縦軸上から左または右に直角に折れて当該周辺施設マーク37、39にそれぞれ到達する折れ線36、38をこの2次元タイムマップに追加する。
【0076】
このようになっていることで、ユーザは、自車両が周辺施設にたどり着くにはいつ誘導経路から分岐するかについての情報と、分岐してから当該周辺施設までどれくらい走行するかについての情報を、2次元的に把握することができる。
【0077】
なお、既述の通り、周辺施設への離脱方向、離脱後走行時間は、上述の誘導経路算出処理19bによって算出する。また、離脱時刻は、誘導経路算出処理19bによって算出された離脱経路の始点および当該始点に到達するまでにかかる誘導経路上の走行時間に基づいて特定することができる。
【0078】
また、ユーザが回転量検出装置の回転を初期位置に戻して上述の所定時間が経過し、それによってステップ110で指定時刻が現在時刻に戻った場合でも、制御回路19は、ステップ130においては、その表示内容を保持し続ける。
【0079】
(iii)メインディスプレイ14aによる時刻表示:
制御回路19は、ステップ140において、メインディスプレイ14aに地図表示を行わせるために、図13に示すような処理を実行する。制御回路19は、この処理において、まずステップ142で、仮想時刻tの初期値として、初期時刻T0にステップ時間ΔTを加算した値を設定する。ここで、初期時刻T0は現在時刻でもよいし、前回のプログラム100の実行においてステップ110で検出された指定時刻(すなわち前回の指定時刻)でもよい。ここで、ステップ時間ΔTは、自車両の未来の位置の予測に要求される精度が高いほど小さくする。例えば、ステップ時間ΔTの絶対値は、指定時刻T1と初期時刻T0との時間間隔の1/10またはそれ以下の値に設定する。そしてステップ時間ΔTは、指定時刻が未来の時刻である場合には正の値であり、指定時刻が過去の時刻である場合には負の値となる。
【0080】
続いてステップ144で、現時点の仮想時刻tが指定時刻T1を過ぎたか否かを判定し、過ぎていなければ続いてステップ146を実行し、過ぎていれば続いてステップ149を実行する。仮想時刻tが指定時刻T1を過ぎるとは、指定時刻T1が未来の時刻の場合、仮想時刻tが指定時刻T1よりも未来の時刻となることをいい、また指定時刻T1が過去の時刻の場合、仮想時刻tが指定時刻T1よりも過去の時刻となることをいう、
ステップ146では、設定された仮想時刻tにおける自車両の仮想位置の特定を行う。この特定処理の詳細については後述する。続いてステップ148では、仮想時刻tの値をステップ時間ΔTだけ進ませる。ステップ148の後、再度ステップ144を実行する。ステップ149では、メインディスプレイ14aに、地図を表示させる。この地図は、直前に実行されたステップ146において特定された仮想位置を含む地図である。そしてこの地図上の、当該仮想位置に、仮想車両マークを表示させる。ステップ149の後、ステップ140の実行が終了する。
【0081】
以上のようなステップ140の処理を実行することで、制御回路19は、初期時刻T0
から指定時刻T1までステップ時刻ΔT刻みで、仮想時刻tを時間経過順に進め(ステップ142、144、148参照)、それぞれの仮想時刻において、その仮想時刻における仮想位置を特定する(ステップ146参照)。そして、指定時刻T1を越える直前の仮想時刻における仮想位置を含む地図を、その地図上の仮想位置に仮想車両マークを重ねて、メインディスプレイ14aに表示させる。
【0082】
したがって、メインディスプレイ14aは、制御回路19がプログラム100を実行する度に、自車両を回転量検出装置が検出した角度が大きくなるほど大きい時間刻みで、仮想車両マークを未来に進め、あるいは過去に戻す。なお、ステップ146で行う自車両の仮想位置特定の方法は、ステップ149で行う画像表示の形態によって異なる。画像表示の形態としては、具体的には(A)ルートスクロール、(B)到達地点群表示がある。以下、これらの地図表示制御について詳述する。
【0083】
(A)ルートスクロール:
制御回路19は、指定時刻が未来の時刻であり、かつ、現在位置から目的地までの誘導経路が設定されている場合、ステップ149では、ルートスクロールによる地図表示を行う。ルートスクロールにおいて、制御回路19は、図14に示すように、誘導経路42に従えば指定時刻T1において自車両が存在するであろう予想位置の周辺の地図と、その地図上の予想位置上の仮想車両マーク43と、その地図上の誘導経路42と、を重畳させた画像を、メインディスプレイ14aに表示させる。
【0084】
このために、制御回路19は、ステップ146において、誘導経路算出処理19bの処理によって特定された誘導経路に沿って、仮想時刻tにおける自車両の位置を算出する。なお、この算出に用いる自車両の移動速度(すなわち、仮想時間の単位変化量当たりの自車両の移動量)は、誘導経路算出処理19bにおいて推定した誘導経路上の各リンクの走行速度と同じとしてもよい。
【0085】
この場合、制御回路19によるプログラム100の繰り返し実行によって、メインディスプレイ14aは、地図上の誘導経路に沿って、仮想車両マークを未来に進め、仮想車両マークの移動とともに、その仮想車両マークが表示画面内に入るよう、地図をスクロールする。
【0086】
また、制御回路19は、指定時刻が過去の時刻である場合、ステップ149では、ルートスクロールによる地図表示を行う。ルートスクロールにおいて、制御回路19は、過去の時刻を示す指定時刻T1において自車両が存在していた位置の周辺の地図と、その地図上の予想位置上の仮想車両マークと、指定時刻T1を含む期間意おける自車両の走行経路を重畳させた画像を、メインディスプレイ14aに表示させる。
【0087】
このために、制御回路19は、ステップ146において、走行経路記録処理19dによってデータ記憶部18に記録された自車両の過去の軌跡データに基づいて、過去の仮想時刻tにおいて自車両が存在していた位置を特定する。なお、過去についてのルートスクロールを行う場合は、ステップ144〜148の処理は省略し、ステップ149において指定時刻T1における自車両の位置を過去の軌跡データに基づいて算出するようになっていてもよい。
【0088】
この場合、制御回路19によるプログラム100の繰り返し実行によって、メインディスプレイ14aは、地図上の誘導経路に沿って、仮想車両マークを過去に進め、仮想車両マークの移動とともに、その仮想車両マークが表示画面内に入るよう、地図をスクロールする。
【0089】
(B)到達地点群表示(イケラブル):
制御回路19は、指定時刻が未来の時刻であり、かつ、現在位置から目的地までの誘導経路が設定されていない場合、ステップ149では、到達地点群表示による地図表示を行う。到達地点表示において、制御回路19は、図15に示すように、現在時刻に現在地51から走行を開始して指定時刻に到達できる仮想位置における複数の仮想車両マーク52a〜mを、現在地51周辺の地図画像に重畳する。
【0090】
このために、制御回路19は、ステップ146において、図16のフローチャートに示すような処理を、仮想位置毎に実行する。仮想位置は、以下説明する通り、その数が増減する場合がある。そして、仮想位置の情報は、ユーザが回転量検出装置の状態を元に戻した状態が所定時間続くまでは、RAM16中に保持され続ける。この到達地点群表示のための仮想位置の情報は、仮想位置の現在の所在位置、仮想位置の進行方向(道路をどちら方向に進むか)、および仮想位置の移動経路履歴を含んでいる。また、ユーザが回転量検出装置の状態を元に戻した状態が所定時間続いた後、制御回路19は、仮想位置が自車両の現在位置に2つあるようにRAM16の情報を書き換え、その後、新たに回転量検出装置を操作するまでの状態(すなわち初期状態)においては、その情報を保持する。この2つの仮想位置のうち、1つは自車両と同じ進行方向の仮想位置であり、もう1つは自車両と反対の進行方向の仮想位置である。
【0091】
制御回路19は、複数の仮想位置のそれぞれについて、ステップ210〜270を実行し、それぞれの実行において、まずステップ210で、当該仮想位置を、当該仮想位置が現在いる道路に沿って、当該仮想位置の進行方向に、時刻ΔT分だけ進める。なお、図13のステップ144、146、148の繰り返しにおいて、仮想位置の情報はRAM16内で破棄されないので、ステップ210で当該仮想位置を時刻ΔT分だけ進めることは、仮想時刻tにおける仮想位置を算出することに相当する。この処理に用いる仮想位置の移動速度(すなわち、仮想時間の単位変化量当たりの自車両の移動量)は、地図データの当該リンクの属性情報に基づいて特定した当該リンクの走行速度を用いてもよい。
【0092】
続いてステップ220では、当該仮想位置が、ΔT分だけ進行することで、いずれかの交差点を通過したか否かを判定する。通過したと判定すると続いてステップ230を実行し、通過しないと判定すると続いてステップ240を実行する。
【0093】
ステップ230では、通過した交差点から分岐する道路のうち、現在当該仮想位置が存在する道路でも、当該仮想位置が過去に走行した道路でもない道路上に、その交差点から遠ざかる方向を進行方向とする仮想位置を新たに生成する。なお、このように生成される仮想位置についての移動経路履歴は、生成の原因となった当該仮想位置の移動経路履歴を引き継ぐものとする。このようにすることで、1つの仮想位置が、交差点において、新たな道路の数だけ複数に分裂することになる。なお、制御回路19は、VICS受信機15から取得した、一方通行道路、通行止め道路等の道路規制情報または道路障害情報に基づいて、車両が走行不能な経路に対しては、新たな仮想位置を生成しないようにしてもよい。ステップ230に続いては、ステップ240を実行する。
【0094】
ステップ240では、当該仮想位置が時刻ΔT分だけ進んだことで現在位置に近づいたか否かを判定し、近づいていれば続いてステップ280で当該仮想位置の情報をRAM16から消去する。近づいていなければ続いてステップ250を実行する。
【0095】
ステップ250では、当該仮想位置が走行している道路を先行する他の仮想位置があるか否かを判定し、あれば続いてステップ280で当該仮想位置の情報をRAM16から消去し、なければ続いてステップ260を実行する。先行する他の仮想位置とは、当該道路を過去に同じ方向に通ったことのある仮想位置をいう。
【0096】
ステップ260では、当該仮想位置が他の仮想位置と衝突するか否かを判定し、衝突するなら続いてステップ280で当該仮想位置の情報をRAM16から消去する。衝突すると判定しないなら続いてステップ270を実行する。他の仮想位置と衝突するか否かは、時刻ΔT分だけ進行して、当該他の仮想位置のある道路を、当該仮想位置と反対方向に進行した結果、当該他の仮想位置の所在位置を通過するか否かによって判定してもよい。または、他の仮想位置と衝突するか否かは、まだ現に衝突していないものの、このまま道路を進行すれば不可避的に当該他の仮想位置と現に衝突する運命にあるか否かによって判定してもよい。なお、このステップ260では、初期状態のように仮想位置が全部で2つしかない場合は、それらについてはどのような場合でも衝突すると判定しないようになっていてもよい。
【0097】
ステップ270では、当該仮想位置に対応する仮想車両マークの色彩を、当該仮想位置の移動経路履歴に記載の道路種別に基づいて決定する。具体的には、図17に示すように、その仮想位置が一般道のみを進行してきた場合は、マーク53のように第1種の色彩(例えば透明色、白色、黒色)を仮想車両マークの色彩として設定し、その仮想位置が高速道路を進行中である場合は、マーク54のように第2種の色彩(例えば赤色、青色、黄色等の第1種の色彩より目立つ色彩)を仮想車両マークの色彩として設定する。また、その仮想位置が一般道路を進行中であり、かつ、その仮想位置が過去に高速道路を進行したことがある場合は、マーク55のように第1の色彩と第2種の色彩を組み合わせた色彩として設定する。ステップ270、280の後、ステップ146の実行は終了する。
【0098】
なお、制御回路19は、ステップ149においては、RAM16中に記録されていない仮想位置に対応する仮想車両マークを、ステップ140で特定した位置に、ステップ270で設定した色彩で、メインディスプレイ14aに表示させる。また、制御回路19は、ステップ149においては、現在位置およびすべての仮想車両マークが表示画面内に入るように、表示する地図の縮尺を変更する。
【0099】
以上のように、到達地点群表示においては、制御回路19によるプログラム100の繰り返し実行によって、初期状態では2つだった仮想車両マークを、指定時刻の経過に応じた量だけ、進行可能な道路上を進行させる(ステップ142〜149参照)。また、それら仮想車両マークは、その進行において、交差点を通過した分だけ分裂して(ステップ220、230参照)増殖する。その結果、メインディスプレイ14aは、ステップ140の制御により、図15に示したような地図を表示し、さらに指定時刻が未来に進んだ場合、図18に示すように、仮想車両マーク52の数がさらに増えて現在地マーク51からより遠ざかった状態の地図を表示する。
【0100】
このようになっていることで、メインディスプレイ14aは、車両の到達可能な領域を時系列順に段階的に複数表示することができる。また、メインディスプレイ14aは、道路が分岐しても、分岐によって生じた道路毎に、その道路において時系列順かつ段階的に進行する仮想車両マークを表示することができる。
【0101】
さらに、メインディスプレイ14aは、当該複数の仮想車両マークのうち2つのマークが衝突することに基づいて、当該2つの仮想車両マークのうち1つを表示画面から消去させる(ステップ260、280参照)。2つの仮想車両マークが衝突するということは、その衝突地点から見てどちらの方向にも仮想車両マークが通ったことを意味している。したがって、これらの仮想車両マークのいずれかを消去することで、既に他のマークが通った経路を他のマークが再度通る可能性を低減することができる。
【0102】
また、制御回路19は、これら複数の仮想車両マークの1つを進行させた結果、当該1つの仮想車両マークが現在地点に近づいたことに基づいて、当該マークを表示画面から消去させる(ステップ240、280参照)。このようになっていることで、メインディスプレイ14aは、現在地点から遠ざかる方向への経路を通って到達できる地点を主に示すことができる。
【0103】
また、メインディスプレイ14aは、各仮想車両マークの色彩を、そのマークの進行経路履歴に基づいて変化させる。このようになっていることで、各仮想車両マークが走行した経路がどのようなものであるかについても、視覚的に把握できるようになる。
【0104】
また、メインディスプレイ14aが到達地点群表示のための処理を行っているときに、ユーザが操作部13のタッチパネルまたはメカニカルスイッチを用いて、メインディスプレイ14aが表示している仮想車両マークの1つを選択する第1種の操作を行ったとき、制御回路19は、その操作に基づいて、選択された仮想車両マークに対応する仮想位置の情報をRAM16から読み出し、その読み出した情報に基づいて、当該仮想車両マークの進行経路を、地図上に重畳表示させる。このようになっていることで、ユーザは、指定したマークが走行した経路がどのようなものであるかについて、視覚的に把握できるようになる。
【0105】
また、メインディスプレイ14aが到達地点群表示のための処理を行っているときに、ユーザが操作部13のタッチパネルまたはメカニカルスイッチを用いて、メインディスプレイ14aが表示している仮想車両マークの1つを指定するための第2種の操作を行うと共に回転量検出装置13を用いて新たな指定時刻を入力したとき、制御回路19は、その操作に基づいて、元の指定時刻に当該仮想車両マークの位置から出発して新たな指定時刻までに到達可能は範囲を表示するための処理を行う。具体的には、元の指定時刻および当該仮想車両マークの位置それぞれ現在時刻および現在位置とみなし、新たな指定時刻について、図13および図16の処理を実行する。これによって、制御回路19は、新たな指定時刻までに走行可能な複数の経路(第2種可能経路の一例に相当する)を複数算出すると共に、制御回路19は、メインディスプレイ14aの表示画面内において、当該複数の第2種可能経路の端部に相当する複数の位置に複数の仮想車両マークを表示させる。このようになっていることで、ユーザは、当該仮想車両マークの位置からからさらに新たな指定に係る時刻まで移動することによって到達できる範囲を、容易に視覚的に把握することができる。
【0106】
また、ルートスクロールや到達地点群表示と共に、制御回路19は、ステップ149において、表示されている地図画像に、さらに、指定時刻における交通状況、天候、外界の環境等の情報等を示す画像を重畳してもよい。例えば、未来の指定時刻における渋滞予想情報をVICSで取得し、取得した結果に基づき、図19の地図画像中の渋滞表示61、62のように、指定時刻に渋滞すると予想される道路を強調表示するようになっていてもよい。また例えば、未来の天候情報をVICSまたは他の無線通信手段(図示せず)を用いて取得し、取得した天候の情報に基づいて、図19の雨雲マーク63のように、指定時刻に降雨があると予想される領域を強調表示するようになっていてもよい。また例えば、指定時刻が夜間の場合、図20の地図のように、地図全体を暗く表示させるようになっていてもよい。
【0107】
なお、メインディスプレイ14aが表示している地図画像が現在地を含まないときは、指定時刻における交通状況、天候、外界の環境等の情報等を示す画像を、現在表示している地図画像に重畳し、指定時刻が変化しても、表示される地図の範囲を固定するようにしてもよい。
【0108】
(第2実施形態)
以下、本発明の第2実施形態について説明する。本実施形態が第1実施形態と異なるのは、本実施形態の制御回路19が、マルチ表示制御処理19eの実現のために、プログラム100に変えてプログラム300を、回転量検出装置に対して操作がある度に読み出して実行することである。そして制御回路19は、このプログラム300の実行において、まずステップ310で、ユーザによる指定時点を特定する。具体的には、回転量検出装置からの信号に基づいて、回転量検出装置が検出した物の回転量に比例する回数(以下、指定回数)を特定する。
【0109】
続いてステップ320で、当該指定回数に関連する目的地設定履歴を読み出す。ここで、目的地設定履歴とは、誘導経路算出処理19bによって走行スケジュールとしてデータ記憶部18に記録されたデータのうち、すでに過去の走行スケジュールとなっているデータをいう。また、指定回数に関連する目的地設定履歴とは、当該目的地設定履歴を走行時間帯の新しい順に数えたときの、当該指定回数番目に相当する目的地設定履歴である。
【0110】
続いてステップ330では、メータディスプレイ14cに、読み出した目的地設定履歴に関連する表示を行わせ、さらにステップ340では、メインディスプレイ14aに、読み出した目的地設定履歴に関連する表示を行わせる。なお、各ステップ330、340が終了しても、各画像表示装置14a、14cは、新たな制御を制御回路19から受けない限り、直前に受けた制御による表示を継続する。そして、ステップ330〜340の処理は短時間で終了する。したがって、ユーザにとっては、各画像表示装置14a、14cの表示は、同じ時間帯についての表示を同時に行っているように見える。
【0111】
このような制御回路19の処理により、車両用ナビゲーション装置1は、これら2つの表示装置に、同じ時間帯に関連する異なる種類の時間関連情報を表示させるので、ユーザに対して、複数の独立した画像表示装置14a〜cによる、過去に関する情報提供を、同時性をもって行うことができる。
【0112】
以下、この制御回路19のマルチ表示制御処理19eによって具体的にメータディスプレイ14cおよびメインディスプレイ14aが行う表示の内容について説明する。
【0113】
制御回路19は、回転検出装置に操作があったものの、まだ回転角度がゼロである場合、ステップ330で、メータディスプレイ14cに、図22に示すような現在時刻表示を行わせる。回転検出装置に操作があったもののまだ回転角度がゼロである場合としては、指が指回転検出装置13aに接触のみした場合がある。この現在時刻表示においては、メータディスプレイ14cは、現在時刻を示す文字および絵柄を表示する。具体的には、メータディスプレイ14cは、第1実施形態の時刻ゲージ21と同形状の時刻ゲージ80、現在時刻表示線81、現在時刻(図22の例では10時32分)を表示する文字を構成要素として有する。またこのとき、制御回路19は、ステップ340で、自車両の現在位置を含む地図をメインディスプレイ14aに表示させる。
【0114】
また、制御回路19は、ステップ110で指定回数を1回と特定した場合、ステップ330で、図23に示すように、時刻ゲージ80および現在時刻表示81に加え、その指定回数に応じた目的地設定履歴(すなわち最新の目的地設定履歴)についての、走行時間帯を示す扇形表示82、目的地を示す文字列(図23の例では小沢CC)および到着日時を示す文字(図23の例では5月27日16時15分)を含む表示を、メータディスプレイ14cに行わせる。この場合、ステップ340では、メインディスプレイ14aに、目的地周辺の地図、または、出発地から目的地までの全経路が重畳された地図を表示させる。
【0115】
ここで扇形表示82は、目的地設定履歴の走行時間帯を、当該時間帯に時計盤の短針が移動する範囲と同じ大きさの扇形で示す。そしてこの際、その扇形の外周部を黒く縁取りすることで、扇形表示82を強調する。
【0116】
また、制御回路19は、続いてステップ110で指定回数を2回と特定した場合、ステップ330で、図24に示すように、時刻ゲージ80および現在時刻表示81に加え、その指定回数に応じた目的地設定履歴についての、走行時間帯を示す扇形表示83、目的地を示す文字列(図24の例では白山公園)および到着日時を示す文字(図24の例では5月20日7時30分)を含む表示を、メータディスプレイ14cに行わせる。この場合、ステップ340では、メインディスプレイ14aに、目的地周辺の地図、または、出発地から目的地までの全経路が重畳された地図を表示させる。
【0117】
ここで扇形表示83は、目的地設定履歴の走行時間帯を、当該時間帯に時計盤の短針が移動する範囲と同じ大きさの扇形で示す。そしてこの際、その扇形の外周部を黒く縁取りすることで、扇形表示83を強調する。またこのとき、制御回路19は、図23でメータディスプレイ14cに表示させた最新の目的地設定履歴に係る扇形表示82を、その扇形表示82より小さくかつ背景等の他の表示要素を透過する画像に変化させた透過型扇形表示84に変化させる。これにより、表示画面中の、扇形表示83と透過型扇形表示84とが重なる部分においては、扇形表示83が前面に現れ、透過型扇形表示84が下に隠れる。
【0118】
以上のような制御回路19の作動により、車両用ナビゲーション装置1は、回転量検出装置が検出した回転量に基づいて、回転量が大きいほど現在時刻より遠い過去の時点(上記例では1回前、2回前とうの段階的時点)の指定を検出する。さらに車両用ナビゲーション装置1は、目的地設定履歴に基づいて、検出した指定に係る時点において走行案内が行われている対象の目的地および当該走行案内を行った時間帯を、メータディスプレイ14cに表示させる。このようにすることで、ユーザは、時計の針を動かすような感覚で、表示のための指定時点を操作することで、過去の走行スケジュールを視覚的に把握することができる。
【0119】
また、車両用ナビゲーション装置1は、時間帯の表示を、メータディスプレイ14cの円内の、当該時間帯における、時計の短針移動範囲に対応する領域の強調表示により行うようになっている。このようになっていることで、ユーザは、時計の表示に対する時間感覚を使って、当該時間帯の表示を認識することができる。
【0120】
なお、上記各実施形態において、車両用ナビゲーション装置1が、車両状態情報表示制御装置の一例に相当する。また画像表示装置14が、表示装置の一例に相当する。また、指回転検出装置13a、ダイヤル回転検出装置13b、および操作部13cのそれぞれが、回転量検出手段の一例に相当する。また、制御回路19が、プログラム100のステップ110を実行することで、時刻指定検出手段の一例として機能する。また、制御回路19が、プログラム100のステップ110またはプログラム300のステップ310を実行することで、時点指定検出手段の一例として機能する。また、制御回路19が、プログラム100のステップ120、130、140、または、プログラム300のステップ330、340を実行することで、表示制御手段の一例として機能する。また、制御回路19が、誘導経路算出処理19bまたは走行経路記録処理19dを実行することで、曲折データ取得手段の一例として機能する。また、制御回路19が、誘導経路算出処理19bを実行することで、走行時間特定手段の一例として機能する。また、制御回路19が、ステップ210を実行することで、可能経路算出手段の一例として機能する。また、制御回路19が、ステップ190を実行することで、マーク表示制御手段の一例として機能する。また、制御回路19が、経路案内処理19cを実行することで、経路案内手段として機能する。
【0121】
(他の実施形態)
以上、本発明の実施形態について説明したが、本発明の範囲は、上記実施形態のみに限定されるものではなく、本発明の各発明特定事項の機能を実現し得る種々の形態を包含するものである。
【0122】
例えば、制御回路19は、メインディスプレイ14aに、段階的に変化する指定時刻に合わせて、段階的に移動する仮想車両マークを表示させていたが、段階的に変化する指定時刻の間の時間を補完するように、指定時刻の変化よりも細かいステップで、仮想車両マークを段階的に移動させてもよい。このような作動は、例えば、ステップ146で算出したすべての仮想時間tにおける仮想位置に基づいてメインディスプレイ14aに仮想車両マークを表示させることで実現する。
【0123】
また、第1実施形態においては、制御回路19は、図16のステップ260、280で、衝突する2つの仮想位置のうち一方を消去しているが、両方を消去するようになっていてもよい。また、制御回路19は、図16のステップ260において他の仮想位置と衝突すると判定された仮想位置を、その後進行させずその判定があった時点の位置に固定するようになっていてもよい。
【0124】
また、制御回路19は、指定時刻が過去である場合、メインディスプレイ14aに、その指定時刻からスタートすれば現在時刻に現在位置にたどり着ける範囲を示すために、図16のステップ210では、道路にそって時間ΔTだけ仮想位置を後退させるようにしてもよい。このようにすることで、メインディスプレイ14aは、仮想車両マークを、指定時刻の遡り量に応じた量だけ、後退可能な道路上を後退させる(ステップ142〜149参照)。また、それら仮想車両マークは、その進行において、交差点を通過した分だけ分裂して(ステップ220、230参照)増殖する。
【0125】
また、制御回路19は、指定時刻が過去である場合、ヘッドアップディスプレイ14bに、過去の走行スケジュールに関する1次元タイムマップまたは2次元タイムマップを表示させるようになっていてもよい。この際、タイムマップは、過去の指定時刻から現在時刻までの自車両の走行履歴曲折(右折、左折等)タイミングを、直線(以下、縦軸という)上の1次元配置によって表すようになっていればよい。このとき、制御回路19は、このような過去の走行履歴に関する1次元タイムマップに、自車両の走行履歴経路から外れて周辺施設に到達するために誘導経路を外れるべきだった離脱時刻、当該誘導経路を外れるべきだった離脱方向、当該誘導経路を外れてから当該周辺施設に到達するまでにかかる離脱後走行時間等の情報を付加した2次元タイムマップを表示するようになっていてもよい。このように、曲折するタイミングの間隔を表示画面上の距離によって表すことで、ユーザは、どのぐらいの時間間隔で曲折を経たのかを、容易に視覚的に把握することができる。
【0126】
また、ヘッドアップディスプレイ14bに表示させる1次元マップおよび2次元マップにおいて、曲折方向を示す情報は、必ずしも矢印である必要はなく、例えば右、左等の文字であってもよい。
【0127】
また、制御回路19は、図7のステップ110において、回転量検出装置からの信号に基づいて、回転量検出装置が検出した物の回転量に比例する未来時間差または過去時間差を特定するようになっていてもよい。例えば90度時計回りに回転したら3時間後を、120度時計回りに回転したら4時間後を、360度反時計回りに回転したら24時間前を、それぞれ指定時刻として特定するようになっていてもよい。また、特定する検出量は、回転量検出装置の検出する回転量に比例する必要はなく、例えば、回転量のn乗(nは1より大きい値、例えば2)に比例していてもよい。すなわち、回転量が大きいほど特定する時間差が大きくなっていればよい。
【0128】
また、画像表示装置は、メインディスプレイ14a、ヘッドアップディスプレイ14b、メータディスプレイ14cに限らず、どのようなものでもよい。
【0129】
また、上記の実施形態において、メインディスプレイ14a、ヘッドアップディスプレイ14b、メータディスプレイ14cに表示させる時間関連情報の種類は、必ずしも上記の実施形態のようになっておらずともよい。
【0130】
例えば、図7のステップ120においては、制御回路19は、ヘッドアップディスプレイ14bに、指定時刻における、車両の燃料消費に関する量を表示させるようになっていてもよい。例えば、指定時刻が過去である場合、その過去の時刻または過去の時刻近傍に行われた経路案内の期間の平均燃費を、ヘッドアップディスプレイ14bに表示させる。そして、指定時刻が現在時刻である場合、現在の瞬間燃費を、ヘッドアップディスプレイ14bに表示させる。そして、指定時刻が未来である場合、その指定時刻における予想走行可能距離をヘッドアップディスプレイ14bに表示させる。なお、指定時刻における予想走行可能距離は、現在時刻における残り燃料量、現在までの平均燃費、および所定の車速(例えば時速30キロメートル)に基づいて算出してもよい。そして、このような燃料消費量に関する量をヘッドアップディスプレイ14bに表示させると同時に、メインディスプレイ14aには、指定時刻における自車両の位置(当該経路案内の経路、または経路に沿った未来の予想自車位置等)を含む地図を表示させるようになっていてもよい。
【0131】
また例えば、図7のステップ120においては、制御回路19は、ヘッドアップディスプレイ14bに、指定時刻における、車両の故障および障害に関する量を表示させるようになっていてもよい。例えば、指定時刻が過去である場合、その過去の時刻または過去の時刻近傍に行われた修理の内容をヘッドアップディスプレイ14bに表示させる。なお、この修理の内容および時刻は、修理時にデータ記憶部18または他の記憶媒体に修理作業者が記録する。そして、指定時刻が現在時刻である場合、現在のシステムチェックを行い、その結果をヘッドアップディスプレイ14bに表示させる。そして、指定時刻が未来である場合、その指定時刻における車両の誘導経路に沿った予想位置における渋滞、工事、車両規制等の障害情報をヘッドアップディスプレイ14bに表示させる。そして、このような故障および障害に関する量をヘッドアップディスプレイ14bに表示させると同時に、メインディスプレイ14aには、指定時刻における自車両の位置(当該経路案内の経路、または経路に沿った未来の予想自車位置等)を含む地図を表示させるようになっていてもよい。
【0132】
また、制御回路19がプログラム100、300を実行する代わりに、プログラム100または300の機能を実現する専用のハードウェアを車両用ナビゲーション装置1が備えるようになっていてもよい。
【図面の簡単な説明】
【0133】
【図1】本発明の第1実施形態に係る車両用ナビゲーション装置1のハードウェア構成図である。
【図2】車両用ナビゲーション装置1が有する指回転検出装置13aの構成を示す図である。
【図3】車両用ナビゲーション装置1が有するダイヤル回転検出装置13bの構成を示す図である。
【図4】車両用ナビゲーション装置1が有するリューズ回転検出装置13cの構成を示す図である。
【図5】車両用ナビゲーション装置1が有するリューズ回転検出装置13cの構成を示す図である。
【図6】制御回路19の制御回路19が実行する処理を示す図である。
【図7】制御回路19が実行するプログラム100のフローチャートである。
【図8】予定スケジュールがある場合のメータディスプレイ14cの表示例である。
【図9】予定スケジュールがない場合のメータディスプレイ14cの表示例である。
【図10】ヘッドアップディスプレイ14bに表示させる1次元タイムマップの表示例である。
【図11】ヘッドアップディスプレイ14bに表示させる1次元タイムマップの表示例である。
【図12】ヘッドアップディスプレイ14bに表示させる2次元タイムマップの表示例である。
【図13】プログラム100のステップ140の詳細なフローチャートである。
【図14】ルートスクロールにおいてメインディスプレイ14aに表示させる地図画像である。
【図15】到達地点郡表示においてメインディスプレイ14aに表示させる地図画像である。
【図16】到達地点群表示のためにステップ146で制御回路19が実行する処理のフローチャートである。
【図17】仮想車両マーク53、54、55のバリエーションを示す図である。
【図18】到達地点郡表示においてメインディスプレイ14aに表示させる地図画像である。
【図19】メインディスプレイ14aが表示する、未来の交通状況を地図に重畳させた画像である。
【図20】メインディスプレイ14aが表示する、未来の交通状況および車両の外界の状況を地図に重畳させた画像である。
【図21】第2実施形態において、制御回路19がマルチ表示制御処理19eのために実行するプログラム300のフローチャートである。
【図22】第2実施形態においてメータディスプレイ14cに表示させる画像を示す図である。
【図23】第2実施形態においてメータディスプレイ14cに表示させる画像を示す図である。
【図24】第2実施形態においてメータディスプレイ14cに表示させる画像を示す図である。
【符号の説明】
【0134】
1…車両用ナビゲーション装置、11…位置検出器、12…音声出力装置、
13…操作部、13a…指回転検出装置、13b…ダイヤル回転検出装置、
13c…リューズ回転検出装置、14…画像表示装置、14a…メインディスプレイ、
14b…ヘッドアップディスプレイ、14c…メータディスプレイ、
15…VICS受信機、16…RAM、17…ROM、18…データ記憶部、
19…制御回路、19a…現在位置特定処理、19b…誘導経路算出処理、
19c…経路案内処理、19d…走行経路記録処理、19e…マルチ表示制御処理、
20…画面中心、21…時刻ゲージ、22…現在時刻表示線、
23…現在時刻表示文字、24、25…スケジュール表示、
26、27…スケジュール期間表示線、28…指定時刻表示線、
37…周辺施設マーク、41、51…現在地マーク、42…誘導経路、
43、52、53、55…仮想車両マーク、61、62…渋滞表示、
63…雨雲マーク、80…時刻ゲージ、81…現在時刻表示線、
82、83…扇形表示、84…透過型扇形表示、100、300…プログラム、
130…上部カバー、131…指検出部、132…稜部、134…目盛り、
135…中央部、136…回転部、136a…非透過部、136b…透過部、
137…軸受部、138…つまみ部、139…軸部。
【特許請求の範囲】
【請求項1】
物の回転運動の量を検出する回転量検出手段と、
前記回転量検出手段が検出した前記回転量に基づいて、前記回転量が大きいほど現在時刻より遠い過去または遠い未来の時刻の指定を検出する時刻指定検出手段と、
前記時刻指定検出手段が検出した指定に係る時刻(以下、指定時刻という)と車両の状態との関連を示す時間関連情報を前記車両内の表示装置に表示させる表示制御手段と、を備えた車両状態情報表示制御装置。
【請求項2】
前記車両の現在または未来の走行経路上の複数の曲折点における曲折方向および前記複数の曲折点間の走行時間のデータを取得する曲折データ取得手段を備え、
前記表示制御手段は、前記曲折データ取得手段が取得した前記複数の曲折点における曲折方向をそれぞれ表す複数の情報(以下、それぞれ曲折情報という)のうち、前記指定時刻を含む基準時間範囲内に前記車両が通過する曲折点の曲折情報を、当該曲折点の通過時刻順に並べて画像表示装置の表示画面に表示させ、かつ、前記表示画面において、隣り合う曲折情報間の距離を、それら曲折点間の走行時間が長いほど長くなるようにし、
前記基準時間範囲は、前記指定時刻と前記現在時刻との時間差が大きくなるほど、より長くなることを特徴とする請求項1に記載の車両状態情報表示制御装置。
【請求項3】
前記表示制御手段は、現在位置から前記指定時刻までに到達可能な複数の位置(以下、それぞれ可能到達点という)を、前記表示画面の地図上に複数表示させることを特徴とする請求項1または2に記載の車両状態情報表示制御装置。
【請求項4】
(複数表示デバイスに同時タイムスライス)
過去または未来の時刻の指定を検出する時刻指定検出手段と、
前記時刻指定検出手段が検出した指定に係る時刻(以下、指定時刻という)と車両の第1種の状態との関連を示す第1の時間関連情報を前記車両内の第1の表示装置(14a)に表示させると共に、前記指定時刻と前記車両の第2種の状態との関連を示す第2の時間関連情報を、前記第1の表示装置と分離している前記車両内の第2の表示装置(14b)に表示させる表示制御手段と、を備えた車両状態情報表示制御装置。
【請求項5】
経路上の複数の曲折点における曲折方向および前記複数の曲折点間の走行時間のデータを取得する曲折データ取得手段と、
前記曲折データ取得手段が取得した前記複数の曲折点における曲折方向をそれぞれ表す複数の情報(以下、それぞれ曲折情報という)を、前記曲折点の通過時刻順に並べて画像表示装置の表示画面に表示させ、かつ、前記表示画面において、隣り合う曲折情報間の距離を、それら曲折点間の走行時間が長いほど長くなるようにする表示制御手段と、を備えた車両状態情報表示制御装置。
【請求項6】
前記表示制御手段は、前記曲折情報を、前記曲折点の通過時刻順に一直線に並べて表示させ、かつ、前記曲折情報は、当該曲折点における進入前後の曲折方向の相対変化を視覚的に表示する絵柄であることを特徴とする請求項5に記載の車両状態情報表示制御装置。
【請求項7】
前記曲折データ取得手段は、前記経路上の複数の分岐点のそれぞれまでの走行時間(以下、それぞれ第1種走行時間という)および前記複数の分岐点のそれぞれから、当該分岐点に対応する前記経路外の地点までの走行時間(以下、それぞれ第2種走行時間という)を特定し、
前記表示制御手段は、同じ分岐点に対応する第1種走行時間と第2種走行時間を2つの成分とする複数の位置を、前記表示画面における2次元座標面上のマークとして表示させることを特徴とする請求項5または6に記載の車両状態情報表示制御装置。
【請求項8】
分岐点までの第1の経路上の第1の走行時間および前記分岐点から第2の地点までの第2の経路上の第2の走行時間を特定する走行時間特定手段と、
前記第1の走行時間および前記第2の走行時間の2つの成分から成る位置を、画像表示装置の表示画面における2次元座標面上のマークとして表示させる表示制御手段と、を備えた車両状態情報表示制御装置。
【請求項9】
過去または未来の時刻の指定を検出する時刻指定検出手段と、
画像表示装置の表示画面内において、現在位置から到達可能な道路上に複数のマークを表示させると共に、繰り返し時刻を増加させ、その繰り返しの各回において、前記複数のマークのそれぞれを、前記時刻の増加に応じた走行距離だけ道路上を進行させる表示制御手段と、を備えた車両状態情報表示制御装置。
【請求項10】
前記表示制御手段は、前記複数のマークの1つを進行させた結果、当該マークが交差点を通過したことに基づいて、当該交差点から分岐する道路で、かつ当該1つのマークが通っていない道路に、前記複数のマークに属するマークとして、新たなマークを生成することを特徴とする請求項9に記載の車両状態情報表示制御装置。
【請求項11】
前記表示制御手段は、前記複数のマークのうち2つのマークが衝突することに基づいて、当該2つのマークのうち1つ以上を前記表示画面から消去させることを特徴とする請求項10に記載の車両状態情報表示制御装置。
【請求項12】
前記表示制御手段は、前記複数のマークの1つを進行させた結果、当該1つのマークが前記現在地点に近づいたことに基づいて、当該マークを前記表示画面から消去させることを特徴とする請求項9または11に記載の車両状態情報表示制御装置。
【請求項13】
過去または未来の時刻の指定を検出する時刻指定検出手段と、
現在位置から前記時刻指定検出手段が検出した指定に係る時刻までに走行可能な複数の経路(以下、それぞれ可能経路という)を複数算出する可能経路算出手段と、
画像表示装置の表示画面内において、前記複数の可能経路の端部に相当する複数の位置に複数のマークを表示させると共に、前記複数のマークのそれぞれの表示態様を、当該マークに対応する可能経路に基づいて制御するマーク表示制御手段と、を備えた車両状態情報表示制御装置。
【請求項14】
過去または未来の時刻の指定を検出する時刻指定検出手段と、
現在位置から前記時刻指定検出手段が検出した指定に係る時刻までに走行可能な複数の経路(以下、それぞれ可能経路という)を複数算出する可能経路算出手段と、
画像表示装置の表示画面内において、前記複数の可能経路の端部に相当する複数の位置に複数のマークを表示させると共に、前記複数のマークのうち1つを指定するユーザの操作があったことに基づいて、前記複数の経路のうち、現在位置から当該1つのマークまでの経路を表示させるマーク表示制御手段と、を備えた車両状態情報表示制御装置。
【請求項15】
過去または未来の時刻の第1の指定を検出する時刻指定検出手段と、
現在位置から前記時刻指定検出手段が検出した前記第1の指定に係る時刻までに走行可能な複数の経路(以下、それぞれ第1種可能経路という)を複数算出する可能経路算出手段と、
画像表示装置の表示画面内において、前記複数の第1種可能経路の端部に相当する複数の位置に複数のマークを表示させるマーク表示制御手段と、を備え、
前記時刻指定検出手段は、過去または未来の時刻の第2の指定を検出し、
前記可能経路算出手段は、前記複数のマークのうちいずれか1つのマークの位置から前記時刻指定検出手段が検出した前記第2の指定に係る時刻までに走行可能な複数の経路(以下、それぞれ第2種可能経路という)を複数算出し、
前記マーク表示制御手段は、画像表示装置の表示画面内において、前記複数の第2種可能経路の端部に相当する複数の位置に複数のマークを表示させることを特徴とする車両状態情報表示制御装置。
【請求項16】
ユーザ操作に基づいて設定された目的地への経路の走行案内を行うと共に、前記目的地と前記走行案内を行った時間帯とを関連付けて記録する経路案内手段と、
物の回転運動の量を検出する回転量検出手段と、
前記回転量検出手段が検出した前記回転量に基づいて、前記回転量が大きいほど現在時刻より遠い過去の時点の指定を検出する時点指定検出手段と、
前記経路案内手段の記録した情報に基づいて、前記時点指定検出手段が検出した指定に係る時点において走行案内が行われている対象の目的地および当該走行案内を行った時間帯を、画像表示装置に表示させる表示制御手段と、を備えた車両状態情報表示制御装置。
【請求項17】
前記表示制御手段は、前記時間帯の表示を、円内の、前記時間帯の時計の短針移動範囲に対応する領域の強調表示により行うことを特徴とする請求項16に記載の車両状態情報表示制御装置。
【請求項18】
検出された回転量に基づいて、前記回転量が大きいほど現在時刻より遠い過去または遠い未来の時刻の指定を検出する時刻指定検出手段、および
前記時刻指定検出手段が検出した指定に係る時刻(以下、指定時刻という)と車両の状態との関連を示す時間関連情報を前記車両内の表示装置に表示させる表示制御手段、として、コンピュータを機能させるプログラム。
【請求項19】
過去または未来の時刻の指定を検出する時刻指定検出手段、および
前記時刻指定検出手段が検出した指定に係る時刻(以下、指定時刻という)と車両の第1種の状態との関連を示す第1の時間関連情報を前記車両内の第1の表示装置に表示させると共に、前記指定時刻と前記車両の第2種の状態との関連を示す第2の時間関連情報を、前記第1の表示装置と分離している前記車両内の第2の表示装置に表示させる表示制御手段として、コンピュータを機能させるプログラム。
【請求項20】
経路上の複数の曲折点における曲折方向および前記複数の曲折点間の走行時間のデータを取得する曲折データ取得手段、および
前記曲折データ取得手段が取得した前記複数の曲折点における曲折方向をそれぞれ表す複数の情報(以下、それぞれ曲折情報という)を、前記曲折点の通過時刻順に並べて画像表示装置の表示画面に表示させ、かつ、前記表示画面において、隣り合う曲折情報間の距離を、それら曲折点間の走行時間が長いほど長くなるようにする表示制御手段として、コンピュータを機能させるプログラム。
【請求項21】
分岐点までの第1の経路上の第1の走行時間および前記分岐点から第2の地点までの第2の経路上の第2の走行時間を特定する走行時間特定手段、および
前記第1の走行時間および前記第2の走行時間の2つの成分から成る位置を、画像表示装置の表示画面における2次元座標面上のマークとして表示させる表示制御手段として、コンピュータを機能させるプログラム。
【請求項22】
過去または未来の時刻の指定を検出する時刻指定検出手段、および
画像表示装置の表示画面内において、現在位置から到達可能な道路上に複数のマークを表示させると共に、繰り返し時刻を増加させ、その繰り返しの各回において、前記複数のマークのそれぞれを、前記仮想時刻の増加に応じた走行距離だけ道路上を進行させる表示制御手段として、コンピュータを機能させるプログラム。
【請求項23】
過去または未来の時刻の指定を検出する時刻指定検出手段、
現在位置から前記時刻指定検出手段が検出した指定に係る時刻までに走行可能な複数の経路(以下、それぞれ可能経路という)を複数算出する可能経路算出手段、および
画像表示装置の表示画面内において、前記複数の可能経路の端部に相当する複数の位置に複数のマークを表示させると共に、前記複数のマークのそれぞれの表示態様を、当該マークに対応する可能経路に基づいて制御するマーク表示制御手段として、コンピュータを機能させるプログラム。
【請求項24】
過去または未来の時刻の指定を検出する時刻指定検出手段、
現在位置から前記時刻指定検出手段が検出した指定に係る時刻までに走行可能な複数の経路(以下、それぞれ可能経路という)を複数算出する可能経路算出手段、および、
画像表示装置の表示画面内において、前記複数の可能経路の端部に相当する複数の位置に複数のマークを表示させると共に、前記複数のマークのうち1つを指定するユーザの操作があったことに基づいて、前記複数の経路のうち、現在位置から当該1つのマークまでの経路を表示させるマーク表示制御手段として、コンピュータを機能させるプログラム。
【請求項25】
過去または未来の時刻の第1の指定を検出する時刻指定検出手段、
現在位置から前記時刻指定検出手段が検出した前記第1の指定に係る時刻までに走行可能な複数の経路(以下、それぞれ第1種可能経路という)を複数算出する可能経路算出手段、および、
画像表示装置の表示画面内において、前記複数の第1種可能経路の端部に相当する複数の位置に複数のマークを表示させるマーク表示制御手段として、コンピュータを機能させるプログラムであって、
前記時刻指定検出手段は、過去または未来の時刻の第2の指定を検出し、
前記可能経路算出手段は、前記複数のマークのうちいずれか1つのマークの位置から前記時刻指定検出手段が検出した前記第2の指定に係る時刻までに走行可能な複数の経路(以下、それぞれ第2種可能経路という)を複数算出し、
前記マーク表示制御手段は、画像表示装置の表示画面内において、前記複数の第2種可能経路の端部に相当する複数の位置に複数のマークを表示させることを特徴とするプログラム。
【請求項26】
ユーザ操作に基づいて設定された目的地への経路の走行案内を行うと共に、前記目的地と前記走行案内を行った時間帯とを関連付けて記録する経路案内手段、
検出された前記回転量に基づいて、前記回転量が大きいほど現在時刻より遠い過去の時点の指定を検出する時点指定検出手段、および
前記経路案内手段の記録した情報に基づいて、前記時点指定検出手段が検出した指定に係る時点において走行案内が行われている対象の目的地および当該走行案内を行った時間帯を、画像表示装置に表示させる表示制御手段として、コンピュータを機能させるプログラム。
【請求項1】
物の回転運動の量を検出する回転量検出手段と、
前記回転量検出手段が検出した前記回転量に基づいて、前記回転量が大きいほど現在時刻より遠い過去または遠い未来の時刻の指定を検出する時刻指定検出手段と、
前記時刻指定検出手段が検出した指定に係る時刻(以下、指定時刻という)と車両の状態との関連を示す時間関連情報を前記車両内の表示装置に表示させる表示制御手段と、を備えた車両状態情報表示制御装置。
【請求項2】
前記車両の現在または未来の走行経路上の複数の曲折点における曲折方向および前記複数の曲折点間の走行時間のデータを取得する曲折データ取得手段を備え、
前記表示制御手段は、前記曲折データ取得手段が取得した前記複数の曲折点における曲折方向をそれぞれ表す複数の情報(以下、それぞれ曲折情報という)のうち、前記指定時刻を含む基準時間範囲内に前記車両が通過する曲折点の曲折情報を、当該曲折点の通過時刻順に並べて画像表示装置の表示画面に表示させ、かつ、前記表示画面において、隣り合う曲折情報間の距離を、それら曲折点間の走行時間が長いほど長くなるようにし、
前記基準時間範囲は、前記指定時刻と前記現在時刻との時間差が大きくなるほど、より長くなることを特徴とする請求項1に記載の車両状態情報表示制御装置。
【請求項3】
前記表示制御手段は、現在位置から前記指定時刻までに到達可能な複数の位置(以下、それぞれ可能到達点という)を、前記表示画面の地図上に複数表示させることを特徴とする請求項1または2に記載の車両状態情報表示制御装置。
【請求項4】
(複数表示デバイスに同時タイムスライス)
過去または未来の時刻の指定を検出する時刻指定検出手段と、
前記時刻指定検出手段が検出した指定に係る時刻(以下、指定時刻という)と車両の第1種の状態との関連を示す第1の時間関連情報を前記車両内の第1の表示装置(14a)に表示させると共に、前記指定時刻と前記車両の第2種の状態との関連を示す第2の時間関連情報を、前記第1の表示装置と分離している前記車両内の第2の表示装置(14b)に表示させる表示制御手段と、を備えた車両状態情報表示制御装置。
【請求項5】
経路上の複数の曲折点における曲折方向および前記複数の曲折点間の走行時間のデータを取得する曲折データ取得手段と、
前記曲折データ取得手段が取得した前記複数の曲折点における曲折方向をそれぞれ表す複数の情報(以下、それぞれ曲折情報という)を、前記曲折点の通過時刻順に並べて画像表示装置の表示画面に表示させ、かつ、前記表示画面において、隣り合う曲折情報間の距離を、それら曲折点間の走行時間が長いほど長くなるようにする表示制御手段と、を備えた車両状態情報表示制御装置。
【請求項6】
前記表示制御手段は、前記曲折情報を、前記曲折点の通過時刻順に一直線に並べて表示させ、かつ、前記曲折情報は、当該曲折点における進入前後の曲折方向の相対変化を視覚的に表示する絵柄であることを特徴とする請求項5に記載の車両状態情報表示制御装置。
【請求項7】
前記曲折データ取得手段は、前記経路上の複数の分岐点のそれぞれまでの走行時間(以下、それぞれ第1種走行時間という)および前記複数の分岐点のそれぞれから、当該分岐点に対応する前記経路外の地点までの走行時間(以下、それぞれ第2種走行時間という)を特定し、
前記表示制御手段は、同じ分岐点に対応する第1種走行時間と第2種走行時間を2つの成分とする複数の位置を、前記表示画面における2次元座標面上のマークとして表示させることを特徴とする請求項5または6に記載の車両状態情報表示制御装置。
【請求項8】
分岐点までの第1の経路上の第1の走行時間および前記分岐点から第2の地点までの第2の経路上の第2の走行時間を特定する走行時間特定手段と、
前記第1の走行時間および前記第2の走行時間の2つの成分から成る位置を、画像表示装置の表示画面における2次元座標面上のマークとして表示させる表示制御手段と、を備えた車両状態情報表示制御装置。
【請求項9】
過去または未来の時刻の指定を検出する時刻指定検出手段と、
画像表示装置の表示画面内において、現在位置から到達可能な道路上に複数のマークを表示させると共に、繰り返し時刻を増加させ、その繰り返しの各回において、前記複数のマークのそれぞれを、前記時刻の増加に応じた走行距離だけ道路上を進行させる表示制御手段と、を備えた車両状態情報表示制御装置。
【請求項10】
前記表示制御手段は、前記複数のマークの1つを進行させた結果、当該マークが交差点を通過したことに基づいて、当該交差点から分岐する道路で、かつ当該1つのマークが通っていない道路に、前記複数のマークに属するマークとして、新たなマークを生成することを特徴とする請求項9に記載の車両状態情報表示制御装置。
【請求項11】
前記表示制御手段は、前記複数のマークのうち2つのマークが衝突することに基づいて、当該2つのマークのうち1つ以上を前記表示画面から消去させることを特徴とする請求項10に記載の車両状態情報表示制御装置。
【請求項12】
前記表示制御手段は、前記複数のマークの1つを進行させた結果、当該1つのマークが前記現在地点に近づいたことに基づいて、当該マークを前記表示画面から消去させることを特徴とする請求項9または11に記載の車両状態情報表示制御装置。
【請求項13】
過去または未来の時刻の指定を検出する時刻指定検出手段と、
現在位置から前記時刻指定検出手段が検出した指定に係る時刻までに走行可能な複数の経路(以下、それぞれ可能経路という)を複数算出する可能経路算出手段と、
画像表示装置の表示画面内において、前記複数の可能経路の端部に相当する複数の位置に複数のマークを表示させると共に、前記複数のマークのそれぞれの表示態様を、当該マークに対応する可能経路に基づいて制御するマーク表示制御手段と、を備えた車両状態情報表示制御装置。
【請求項14】
過去または未来の時刻の指定を検出する時刻指定検出手段と、
現在位置から前記時刻指定検出手段が検出した指定に係る時刻までに走行可能な複数の経路(以下、それぞれ可能経路という)を複数算出する可能経路算出手段と、
画像表示装置の表示画面内において、前記複数の可能経路の端部に相当する複数の位置に複数のマークを表示させると共に、前記複数のマークのうち1つを指定するユーザの操作があったことに基づいて、前記複数の経路のうち、現在位置から当該1つのマークまでの経路を表示させるマーク表示制御手段と、を備えた車両状態情報表示制御装置。
【請求項15】
過去または未来の時刻の第1の指定を検出する時刻指定検出手段と、
現在位置から前記時刻指定検出手段が検出した前記第1の指定に係る時刻までに走行可能な複数の経路(以下、それぞれ第1種可能経路という)を複数算出する可能経路算出手段と、
画像表示装置の表示画面内において、前記複数の第1種可能経路の端部に相当する複数の位置に複数のマークを表示させるマーク表示制御手段と、を備え、
前記時刻指定検出手段は、過去または未来の時刻の第2の指定を検出し、
前記可能経路算出手段は、前記複数のマークのうちいずれか1つのマークの位置から前記時刻指定検出手段が検出した前記第2の指定に係る時刻までに走行可能な複数の経路(以下、それぞれ第2種可能経路という)を複数算出し、
前記マーク表示制御手段は、画像表示装置の表示画面内において、前記複数の第2種可能経路の端部に相当する複数の位置に複数のマークを表示させることを特徴とする車両状態情報表示制御装置。
【請求項16】
ユーザ操作に基づいて設定された目的地への経路の走行案内を行うと共に、前記目的地と前記走行案内を行った時間帯とを関連付けて記録する経路案内手段と、
物の回転運動の量を検出する回転量検出手段と、
前記回転量検出手段が検出した前記回転量に基づいて、前記回転量が大きいほど現在時刻より遠い過去の時点の指定を検出する時点指定検出手段と、
前記経路案内手段の記録した情報に基づいて、前記時点指定検出手段が検出した指定に係る時点において走行案内が行われている対象の目的地および当該走行案内を行った時間帯を、画像表示装置に表示させる表示制御手段と、を備えた車両状態情報表示制御装置。
【請求項17】
前記表示制御手段は、前記時間帯の表示を、円内の、前記時間帯の時計の短針移動範囲に対応する領域の強調表示により行うことを特徴とする請求項16に記載の車両状態情報表示制御装置。
【請求項18】
検出された回転量に基づいて、前記回転量が大きいほど現在時刻より遠い過去または遠い未来の時刻の指定を検出する時刻指定検出手段、および
前記時刻指定検出手段が検出した指定に係る時刻(以下、指定時刻という)と車両の状態との関連を示す時間関連情報を前記車両内の表示装置に表示させる表示制御手段、として、コンピュータを機能させるプログラム。
【請求項19】
過去または未来の時刻の指定を検出する時刻指定検出手段、および
前記時刻指定検出手段が検出した指定に係る時刻(以下、指定時刻という)と車両の第1種の状態との関連を示す第1の時間関連情報を前記車両内の第1の表示装置に表示させると共に、前記指定時刻と前記車両の第2種の状態との関連を示す第2の時間関連情報を、前記第1の表示装置と分離している前記車両内の第2の表示装置に表示させる表示制御手段として、コンピュータを機能させるプログラム。
【請求項20】
経路上の複数の曲折点における曲折方向および前記複数の曲折点間の走行時間のデータを取得する曲折データ取得手段、および
前記曲折データ取得手段が取得した前記複数の曲折点における曲折方向をそれぞれ表す複数の情報(以下、それぞれ曲折情報という)を、前記曲折点の通過時刻順に並べて画像表示装置の表示画面に表示させ、かつ、前記表示画面において、隣り合う曲折情報間の距離を、それら曲折点間の走行時間が長いほど長くなるようにする表示制御手段として、コンピュータを機能させるプログラム。
【請求項21】
分岐点までの第1の経路上の第1の走行時間および前記分岐点から第2の地点までの第2の経路上の第2の走行時間を特定する走行時間特定手段、および
前記第1の走行時間および前記第2の走行時間の2つの成分から成る位置を、画像表示装置の表示画面における2次元座標面上のマークとして表示させる表示制御手段として、コンピュータを機能させるプログラム。
【請求項22】
過去または未来の時刻の指定を検出する時刻指定検出手段、および
画像表示装置の表示画面内において、現在位置から到達可能な道路上に複数のマークを表示させると共に、繰り返し時刻を増加させ、その繰り返しの各回において、前記複数のマークのそれぞれを、前記仮想時刻の増加に応じた走行距離だけ道路上を進行させる表示制御手段として、コンピュータを機能させるプログラム。
【請求項23】
過去または未来の時刻の指定を検出する時刻指定検出手段、
現在位置から前記時刻指定検出手段が検出した指定に係る時刻までに走行可能な複数の経路(以下、それぞれ可能経路という)を複数算出する可能経路算出手段、および
画像表示装置の表示画面内において、前記複数の可能経路の端部に相当する複数の位置に複数のマークを表示させると共に、前記複数のマークのそれぞれの表示態様を、当該マークに対応する可能経路に基づいて制御するマーク表示制御手段として、コンピュータを機能させるプログラム。
【請求項24】
過去または未来の時刻の指定を検出する時刻指定検出手段、
現在位置から前記時刻指定検出手段が検出した指定に係る時刻までに走行可能な複数の経路(以下、それぞれ可能経路という)を複数算出する可能経路算出手段、および、
画像表示装置の表示画面内において、前記複数の可能経路の端部に相当する複数の位置に複数のマークを表示させると共に、前記複数のマークのうち1つを指定するユーザの操作があったことに基づいて、前記複数の経路のうち、現在位置から当該1つのマークまでの経路を表示させるマーク表示制御手段として、コンピュータを機能させるプログラム。
【請求項25】
過去または未来の時刻の第1の指定を検出する時刻指定検出手段、
現在位置から前記時刻指定検出手段が検出した前記第1の指定に係る時刻までに走行可能な複数の経路(以下、それぞれ第1種可能経路という)を複数算出する可能経路算出手段、および、
画像表示装置の表示画面内において、前記複数の第1種可能経路の端部に相当する複数の位置に複数のマークを表示させるマーク表示制御手段として、コンピュータを機能させるプログラムであって、
前記時刻指定検出手段は、過去または未来の時刻の第2の指定を検出し、
前記可能経路算出手段は、前記複数のマークのうちいずれか1つのマークの位置から前記時刻指定検出手段が検出した前記第2の指定に係る時刻までに走行可能な複数の経路(以下、それぞれ第2種可能経路という)を複数算出し、
前記マーク表示制御手段は、画像表示装置の表示画面内において、前記複数の第2種可能経路の端部に相当する複数の位置に複数のマークを表示させることを特徴とするプログラム。
【請求項26】
ユーザ操作に基づいて設定された目的地への経路の走行案内を行うと共に、前記目的地と前記走行案内を行った時間帯とを関連付けて記録する経路案内手段、
検出された前記回転量に基づいて、前記回転量が大きいほど現在時刻より遠い過去の時点の指定を検出する時点指定検出手段、および
前記経路案内手段の記録した情報に基づいて、前記時点指定検出手段が検出した指定に係る時点において走行案内が行われている対象の目的地および当該走行案内を行った時間帯を、画像表示装置に表示させる表示制御手段として、コンピュータを機能させるプログラム。
【図1】


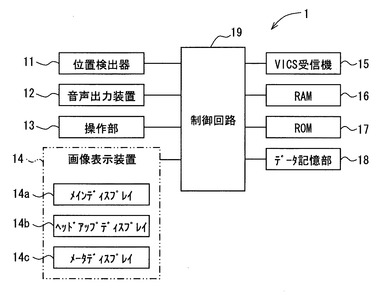
【図2】
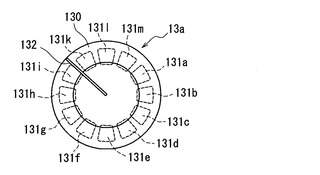
【図3】
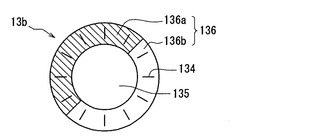
【図4】
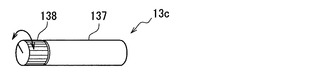
【図5】
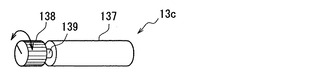
【図6】
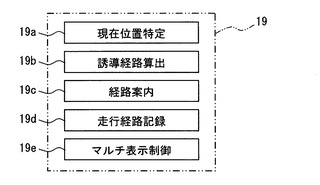
【図7】
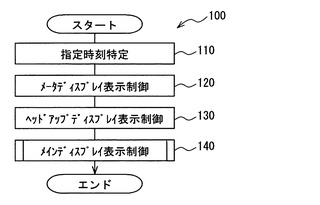
【図8】
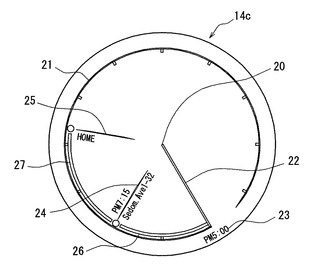
【図9】
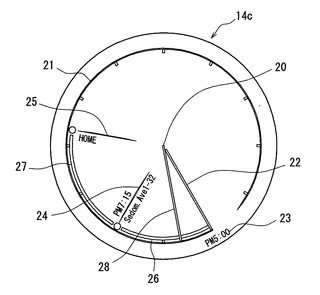
【図10】
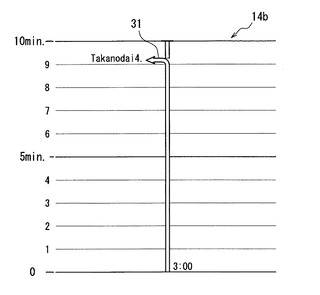
【図11】
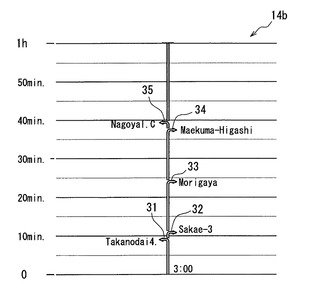
【図12】
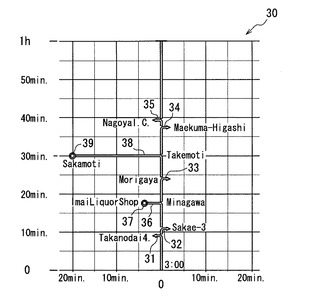
【図13】
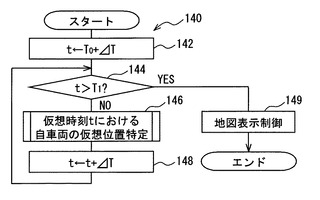
【図14】
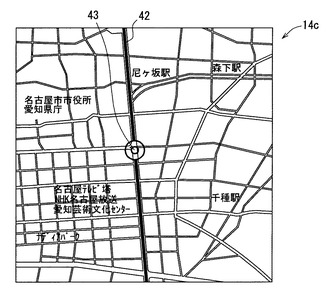
【図15】
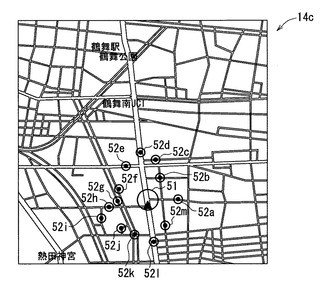
【図16】
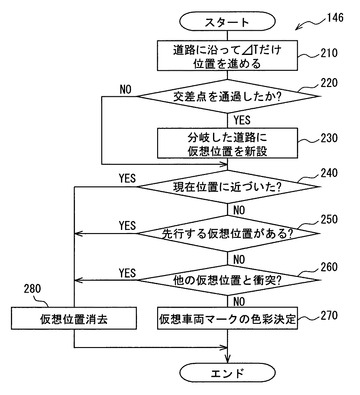
【図17】
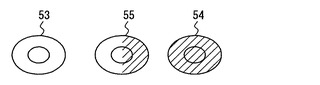
【図18】
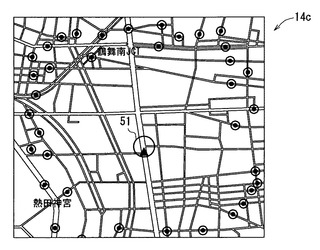
【図19】
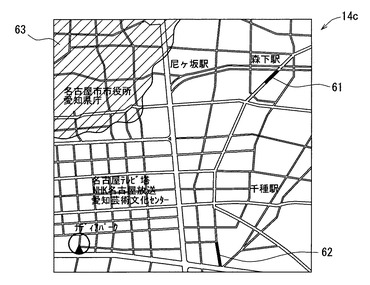
【図20】
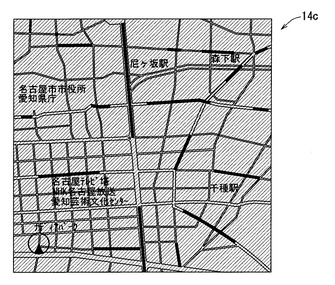
【図21】
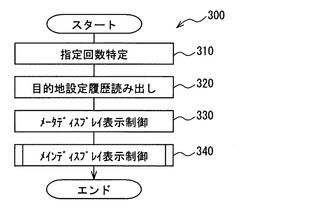
【図22】
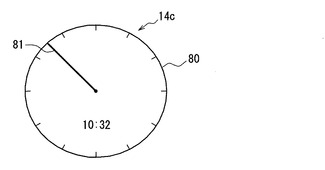
【図23】
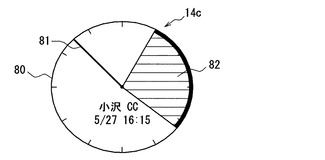
【図24】
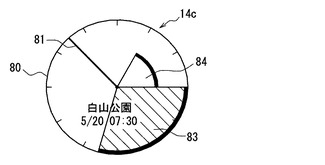
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2007−263890(P2007−263890A)
【公開日】平成19年10月11日(2007.10.11)
【国際特許分類】
【出願番号】特願2006−92367(P2006−92367)
【出願日】平成18年3月29日(2006.3.29)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【出願人】(502324066)株式会社デンソーアイティーラボラトリ (332)
【Fターム(参考)】
【公開日】平成19年10月11日(2007.10.11)
【国際特許分類】
【出願日】平成18年3月29日(2006.3.29)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【出願人】(502324066)株式会社デンソーアイティーラボラトリ (332)
【Fターム(参考)】
[ Back to top ]