
車両用の加速度センサの出力補正装置
【課題】経時変化による長時間の緩やかな0点の変化と、温度変化や車両への積載等の比較的短時間の0点の変化の双方に対応した0点補正を行う。
【解決手段】ロングターム補正量とショートターム補正量とを合せて調停後補正量ΔGxを演算し、Gセンサ2の出力値が示す補正前の加速度Gx0から調停後補正量ΔGxを差し引くことで0点補正後のGセンサ値Gxを演算する。ロングターム補正量については、ショートターム補正処理により、Gセンサ2の出力値に対してローパスフィルタを掛けることで長時間の0点の変化を抽出することで求める。また、ショートターム補正量については、ロングターム補正処理よりも短周期のフィルタを掛けるショートターム補正処理により求める。また、ショートターム補正量に不感帯を設け、その不感帯の範囲を超える部分を抽出し、それを最終的なショートターム補正量として、Gセンサ2の出力値の短時間の0点の変化を補正する。
【解決手段】ロングターム補正量とショートターム補正量とを合せて調停後補正量ΔGxを演算し、Gセンサ2の出力値が示す補正前の加速度Gx0から調停後補正量ΔGxを差し引くことで0点補正後のGセンサ値Gxを演算する。ロングターム補正量については、ショートターム補正処理により、Gセンサ2の出力値に対してローパスフィルタを掛けることで長時間の0点の変化を抽出することで求める。また、ショートターム補正量については、ロングターム補正処理よりも短周期のフィルタを掛けるショートターム補正処理により求める。また、ショートターム補正量に不感帯を設け、その不感帯の範囲を超える部分を抽出し、それを最終的なショートターム補正量として、Gセンサ2の出力値の短時間の0点の変化を補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の前後方向の加速度に応じた出力を発生させる加速度センサ(以下、Gセンサという)の出力を補正する出力補正装置に関するものである。
【背景技術】
【0002】
従来、特許文献1において、Gセンサの0点補正を行う技術が開示されている。具体的には、特許文献1では、路面勾配により推定された車両の前後方向の路面勾配に基づいてGセンサの0点補正を行っている。そして、路面勾配から想定されるGセンサの出力値と実際のGセンサの出力値とから0点からの変化量(オフセット量)を演算し、演算した変化量に対して、単一のフィルタ定数を持ったローパスフィルタを用いて高周波成分(ノイズ)を取り除くようにしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−250948号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、Gセンサの0点は、経時変化(経年変化)による長時間の緩やかな変化と、温度変化や車両への積載等による比較的短時間の変化の2つが合わさって変化するため、上記特許文献1に示されるような単一のフィルタ定数のローパスフィルタを用いて抽出した変化量に対して補正したのでは、双方の変化を精度良く補正することができない。
【0005】
本発明は上記点に鑑みて、経時変化による長時間の緩やかな0点の変化と、温度変化や車両への積載等の比較的短時間の0点の変化の双方に対応した0点補正を行うことができるGセンサの出力補正装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、請求項1に記載の発明は、Gセンサ(2)の0点が長時間経て変化する長時間の0点の変化に対する補正量となるロングターム補正量を設定する0点長期変化補正量設定手段(120、125)と、Gセンサ(2)の0点が比較的短時間で変化する比較的短時間の0点の変化に対する補正量となるショートターム補正量を設定する0点短期変化補正量設定手段(130、135)と、0点長期変化補正量設定手段(120、125)および0点短期変化補正量設定手段(130、135)で設定されたロングターム補正量およびショートターム補正量に基づいて、Gセンサ(2)の出力値を補正することで0点補正を行う補正手段(155〜165)と、を有した構成とされている。そして、0点長期変化補正手段(120、125)は、Gセンサ(2)の出力値に対応する値に対して長周期フィルタ手段によるフィルタを掛けることで長時間の0点の変化に対するロングターム補正量を設定し、0点短期変化補正手段(130、135)は、Gセンサ(2)の出力値に対応する値に対して短周期フィルタ手段によるフィルタを掛けることで短時間の0点の変化量に対する仮ショートターム補正量を設定すると共に、該仮ショートターム補正量が所定の不感帯の範囲を超えている部分を最終的なショートターム補正量として設定し、補正手段(155〜165)は、Gセンサ(2)の出力値からロングターム補正量およびショートターム補正量を差し引くことで、Gセンサ(2)の出力値の0点補正を行うことを特徴としている。
【0007】
このように、Gセンサ(2)の出力値からロングターム補正量およびショートターム補正量を差し引くことで0点補正を行うようにしている。これにより、長時間の0点の変化をロングターム補正量によって確実に補正し、さらに比較的短時間の0点の変化をショートターム補正量によって確実に補正できる。そして、ショートターム補正量については、不感帯を設けているため、ノイズ除去が行なえ、より適切に短時間の0点の変化を補正できる。したがって、経時変化による長時間の緩やかな0点の変化と、温度変化や車両への積載等の比較的短時間の0点の変化の双方に対応した0点補正を行うことができるGセンサ(2)の出力補正装置とすることが可能となる。
【0008】
請求項2に記載の発明では、さらに、車両に備えられた各車輪の車輪速度を演算すると共に、車両の車速を演算する速度演算手段(11a)と、車両を走行させる駆動力を発生する原動機の駆動力に関する情報を入力すると共に、速度演算手段(11a)で演算される車速を取得し、原動機の駆動力と車速とに基づいて、車両が平坦路を走行しているかを判定する平坦路走行判定手段(11c)と、速度演算手段(11a)で演算される各車輪の車輪速度に基づいて車両が直進走行しているか否かを判定する直進走行判定手段(11b)とを備え、平坦路走行判定手段にて車両が平坦路を走行していると判定され、かつ、直進走行判定手段(11b)にて車両が直進走行していると判定されると、0点長期変化補正手段(120、125)および0点短期変化補正手段(130、135)によるロングターム補正値およびショートターム補正値の設定を行うと共に、補正手段(155〜165)によるGセンサ(2)の出力値の0点補正を行うことを特徴としている。
【0009】
平坦路では理想的にはGセンサ(2)の出力値に重力加速度成分が含まれていないし、直進走行をしている状態では、車両旋回に起因するノイズなどが含まれない。このため、Gセンサ(2)の出力値が0でなければ、それが0点からの変化量(オフセット)となる。したがって、平坦路、かつ、車両が直進走行しているときであれば、最適に0点からの変化量を抽出することが可能となり、正確にGセンサ(2)の0点補正を行うことが可能となる。
【0010】
請求項3に記載の発明では、0点長期変化補正手段(120、125)は、ロングターム補正量の変化量の絶対値がその上限値を超えているときには当該上限値をロングターム補正量の変化量として、もしくは、ロングターム補正量の変化量の絶対値がその下限値を下回っているときには当該下限値をロングターム補正量の変化量として用いる上下限ガードを行ってロングターム補正量を設定することを特徴としている。
【0011】
このように、ロングターム補正量に上下限ガードを掛けることができる。これにより、ロングターム補正量の変化量が想定される値から離れた値に設定されることを防止することができる。
【0012】
請求項4に記載の発明では、0点短期変化補正手段(130、135)は、ショートターム補正量の変化量の絶対値がその上限値を超えているときには当該上限値をショートターム補正量の変化量として、もしくは、ショートターム補正量の変化量の絶対値がその下限値を下回っているときには当該下限値をショートターム補正量の変化量として用いる上下限ガードを行ってショートターム補正量を設定することを特徴としている。
【0013】
このように、ショートターム補正量についても上下限ガードを掛けることができる。これにより、ショートターム補正量の変化量が想定される値から離れた値に設定されることを防止することができる。
【0014】
なお、0点短期変化補正手段(130、135)で用いられる不感帯の範囲については、例えば請求項5に記載したように、想定されるノイズの値とGセンサ(2)の出力値を用いて実行する制御に影響を与えるGセンサ(2)の出力値の0点の変化量に基づいて設定することができる。
【0015】
上記請求項1ないし5では、本発明を車両用のGセンサの出力補正装置として把握したものであるが、請求項6に記載したように、本発明を車両用のGセンサの出力補正方法として把握することもできる。これにより、請求項1に記載の発明と同様の効果を得ることができる。
【0016】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【図面の簡単な説明】
【0017】
【図1】本発明の第1実施形態にかかるGセンサの出力補正装置が適用された車両制御システムのブロック構成を示した図である。
【図2】Gセンサ0点補正処理の詳細を示したフローチャートである。
【図3】Gセンサ0点補正処理が行われる場合のタイミングチャートであり、(a)は、ロングターム補正処理による加速度Gx0の0点補正を行った場合の様子を示すタイミングチャート、(b)は、ロングターム補正処理後にショートターム補正処理による加速度Gx0の0点補正を行った場合の様子を示すタイミングチャートである。
【発明を実施するための形態】
【0018】
以下、本発明の実施形態について図に基づいて説明する。
【0019】
(第1実施形態)
本発明の第1実施形態について説明する。ここでは、図を参照して本実施形態にかかるGセンサの0点補正を行う出力補正装置について説明する。
【0020】
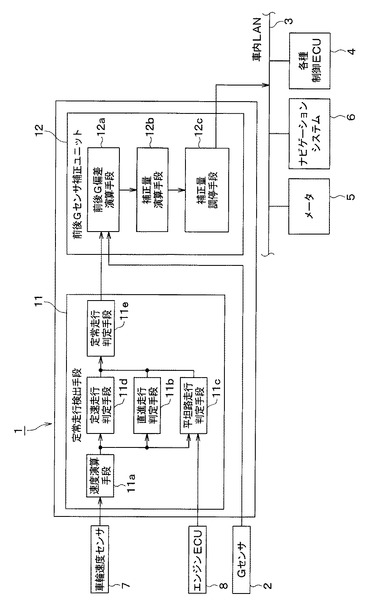
図1は、本実施形態にかかるGセンサの出力補正装置が適用された車両制御システムのブロック構成を示した図である。この図を参照して車両制御システムの構成について説明する。
【0021】
図1に示すように、車両制御システムは、出力補正装置1によってGセンサ2の0点補正を行い、このGセンサ2の0点補正を行った後のGセンサ値Gxを車内LAN3を通じて各種制御ECU4、メータ5、ナビゲーションシステム6などに出力している。そして、例えば各種制御ECU4等で、0点補正後のGセンサ値Gxを用いて車両制御等を実行する。なお、出力補正装置1は、ECU等によって構成されるが、0点補正を行うために設けられた独立のECUである必要はなく、例えばブレーキECUなどにおいてGセンサ2の0点補正を行う機能として組み込まれていても良い。
【0022】
出力補正装置1には、Gセンサ2や車輪速度センサ7の出力値が入力されると共にエンジンECU8からの情報が入力され、これらの入力に基づいてGセンサ2の0点補正を行っている。
【0023】
具体的には、出力補正装置1は、定常走行検出手段11や補正ユニット12を有した構成とされ、補正ユニット12が定常走行検出手段11から得た情報に基づいてGセンサ2の0点補正を実行する。
【0024】
定常走行検出手段11は、車両が定常走行中であることを検出する。定常走行とは、平坦路(水平路)において、直進走行している状態を想定しており、定常走行検出手段11は、車輪速度センサ7の出力値およびエンジンECU8からエンジントルクに関する情報を入力し、これらに基づいて車両が定常走行中であることを検出している。具体的には、定常走行検出手段11は、速度演算手段11a、直進走行判定手段11b、平坦路走行判定手段11c、定速走行判定手段11dおよび定常走行判定手段11eを有した構成とされている。
【0025】
速度演算手段11aは、車輪速度センサ7の出力値に基づいて各車輪の車輪速度を演算すると共に、演算した車輪速度に基づいて周知の手法によって車速(推定車体速度)を演算する。
【0026】
直進走行判定手段11bは、速度演算手段11aで演算された各車輪の車輪速度に基づいて、車両が直進走行中であることを検出する。例えば、直進走行判定手段11bは、各車輪速度の差、例えば左車輪と右車輪の車輪速度が所定範囲以内であれば、直進走行中であると判定している。
【0027】
平坦路走行判定手段11cは、車両が平坦路を走行中であるか否かを判定する。例えば、平坦路走行判定手段11cは、エンジンECU8からエンジントルクに関する情報を取得すると、取得したエンジントルクに対応して想定される車速が速度演算手段11aで演算された車速と一致しているか否か(例えばこれらの車速の差が所定範囲内であるか否か)を判定し、一致していれば(車速の差が所定範囲内であれば)、平坦路であると判定している。
【0028】
定速走行判定手段11dは、車両が定速走行中であるか否かを判定している。例えば、定速走行であることは、速度演算手段11aが演算した車速が一定値であることなどに基づいて判定することができる。なお、定常走行の必須条件には、車両が定速走行中であることは含まれないが、定速走行中には加速度成分の影響が含まれず、より正確なGセンサ2の変化量(オフセット量)を演算できることから、本実施形態では、定速走行中であることも定常走行中であると判定される条件の1つに含めている。ただし、前述したように、定速走行中であることは定常走行の必須条件ではないため、定速走行中の条件を外して定常走行を判定しても良い。
【0029】
定常走行判定手段11eは、直進走行判定手段11b、平坦路走行判定手段11cおよび定速走行判定手段11dでの判定結果に基づいて、車両が定常走行中か否かの判定を行う。すなわち、定常走行判定手段11eは、直進走行判定手段11bで直進走行中であると判定され、平坦路走行判定手段11cにて平坦路走行中と判定され、定速走行判定手段11dで定速走行中と判定されると、車両が定常走行中と判定する。そして、定常走行判定手段11eにて定常走行中と判定されると、定常走行検出手段11の検出結果として定常走行中であること、つまりGセンサ2の0点補正の補正許可を示す出力をGセンサ補正ユニット12に出力する。
【0030】
Gセンサ補正ユニットは、前後G偏差演算手段12aと補正量演算手段12bおよび補正量調停手段12cを有した構成とされている。
【0031】
前後G偏差演算手段12aは、Gセンサ2の出力値に基づいて、定常走行中の加速度Gx0を求めると共に、Gセンサ偏差Diff#Gxを演算する。Gセンサ偏差Diff#Gxは、Gセンサ2の出力値が示す加速度Gx0の本来の加速度からの変化量(オフセット量)であり、Gセンサ2の出力値から求めた加速度Gx0から速度演算手段11aで演算された車速を微分して演算される演算加速度DVT0、つまり本来取り出したい加速度を差し引いた値との差として演算される。このGセンサ偏差Diff#Gxには、経時変化(経年変化)による長時間の緩やかな0点の変化(オフセット)と、温度変化や車両への積載等による比較的短時間の0点の変化(オフセット)の2つが含まれている。
【0032】
補正量演算手段12bは、前後G偏差演算手段12aにて演算されたGセンサ偏差Diff#Gxに基づいて、2つのオフセットに応じた補正量を演算する。例えば、補正量演算手段12bでは、Gセンサ偏差Diff#Gxに基づいて、移動平均の演算などに基づいて長時間の緩やかな0点の変化に起因するオフセットに対応した補正量(以下、ロングターム補正量という)や比較的短時間の0点の変化に起因するオフセットに対応した補正量(以下、ショートターム補正量という)を演算する。また、補正量演算手段12bでは、各補正量の変化量に上下限ガードを掛けたり、ショートターム補正量に基づく補正を行う際に不感帯を設けたりして、最終的なロングターム補正量やショートターム補正量を演算している。不感帯の幅は、想定されるノイズの値と、各種制御に影響を与えるGセンサ2の0点の変化量の両方を考慮して設定している。
【0033】
補正量調停手段12cは、補正量演算手段12bで演算したロングターム補正量やショートターム補正量に基づいて、Gセンサ2の0点補正を行う。この補正量調停手段12cにより、0点補正後のGセンサ値Gxが演算され、このGセンサ値Gxが車内LAN3を通じて、各種制御ECU4、メータ5、ナビゲーションシステム6などに出力される。
【0034】
以上のようにして、本実施形態にかかるGセンサ2の出力補正装置1が構成されている。続いて、このように構成された出力補正装置1が実行するGセンサ0点補正処理について説明する。
【0035】
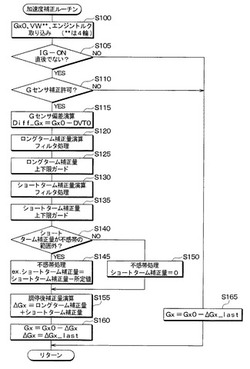
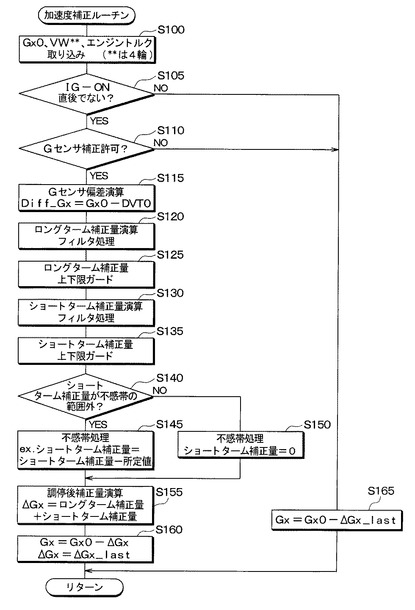
図2は、Gセンサ0点補正処理の詳細を示したフローチャートである。この図に示すGセンサ0点補正処理は、イグニッションスイッチがオンされている際に所定の制御周期(例えば5秒)毎に実行される。
【0036】
まず、ステップ100では、Gセンサ2の出力値や車輪速度センサ7の出力値の取り込み、および、エンジンECU8からの情報取得に基づいて、加速度Gx0や各車輪の車輪速度VW**(なお、**は、各車輪を示す添え字であり、左前輪FL、右前輪FR、左後輪RL、右後輪RRの4輪を意味している)およびエンジントルクの取り込みを行う。続いて、ステップ105では、イグニッションスイッチがオンされた直後ではないか否かを判定する。すなわち、イグニッションスイッチがオンされた直後には、アイドリングが安定しておらず、エンジントルクと車速との関係が理想的な関係になっていない。このため、イグニッションスイッチがオンされた直後にはGセンサ2の0点補正に用いる補正量を更新するのには相応しくないとして、本ステップ105で肯定判定された場合にのみ、0点補正に用いる補正量の更新および0点補正を行うための処理に進むようにしている。例えば、各種制御ECU4やエンジンECU8などで起動されてからの経過時間をカウンタでカウントしていることから、そのカウント値を車内LAN3などを通じて取得し、カウント値が所定値未満であればイグニッションスイッチがオンされた直後であると判定している。
【0037】
更に、ステップ110では、Gセンサ補正許可条件を満たしているか否かを判定している。Gセンサ補正許可条件とは、Gセンサ2の0点補正に用いる補正量の更新を行って良いことを示す条件であり、ここでは、車両が定常走行中であること、つまり平坦路において直進走行中であることをGセンサ補正許可条件としている。平坦路では理想的にはGセンサ2の出力値に重力加速度成分が含まれていないし、直進走行をしている状態では、車両旋回に起因するノイズなどが含まれないことから、Gセンサ2の出力値が0でなければ、それが0点からの変化量(オフセット)となり、最適に0点からの変化量を抽出することが可能となる。
【0038】
このため、定常走行検出手段11で車両が定常走行中であることが検出されてその旨を示す出力が出されていると、Gセンサ補正許可条件を満たしていると判定している。ここで肯定判定されると、次のステップ115〜160において、0点補正に用いる補正量の更新および0点補正を行うための処理に進むようにしている。これらの処理は、上記したGセンサ補正ユニット12に含まれる前後G偏差演算手段12aや補正量演算手段12bもしくは補正量調停手段12cにて実行される。
【0039】
ステップ115では、Gセンサ偏差演算を行う。この処理は、前後G偏差演算手段12aにて実行され、Gセンサ2の出力値が示す加速度Gx0から速度演算手段11aで演算された車速を微分して演算される演算加速度DVT0、つまり本来取り出したい加速度を差し引いた値であるGセンサ偏差Diff#Gxが演算される。
【0040】
次に、ステップ120およびステップ125ではロングターム補正処理を実行する。まず、ステップ120では、ロングターム補正量演算およびフィルタ処理を行う。ロングターム補正量演算では、ステップ115で演算したGセンサ偏差Diff#Gxに基づいてロングターム補正量を演算する。ロングターム補正量は、Gセンサ2の搭載状態等に応じて正負いずれの値にも取り得る。ここでは、所定の制御周期毎に演算されたGセンサ偏差Diff#Gxを蓄積していき、蓄積したGセンサ偏差Diff#Gxの移動平均を演算することによってロングターム補正量を演算している。例えば、制御周期が第1所定回数に達する毎(例えば制御周期の60周期毎)にGセンサ偏差Diff#Gxを記憶し、その総和を第1所定回数にて割ることでGセンサ偏差Diff#Gxの平均値を求めるということを繰り返し、Gセンサ偏差Diff#Gxの移動平均を演算する。そして、フィルタ処理として、ノイズ除去のために、求めたGセンサ偏差Diff#Gxの移動平均をローパスフィルタに掛ける。ローパスフィルタについては、ロングターム補正量の演算が長時間に行われることから、その長時間に合せて設定している。これにより、Gセンサ偏差Diff#Gxの移動平均から高周波成分を取り除いたものがロングターム補正量として設定される。
【0041】
また、ステップ125では、ステップ120で設定されたロングターム補正量の変化量に上下限ガードを掛ける。上下限ガードとは、ステップ120で設定されたロングターム補正量の変化量の絶対値が想定される上限値(最大補正量)を超えていたり、下限値(最小補正量)を下回っていた場合に、ロングターム補正量の変化量の絶対値をその上限値もしくは下限値に設定することで、ロングターム補正量の変化量にガードを掛けるものである。そして、上下限ガードが掛けられる場合には、前回の制御周期の際に設定されたロングターム補正量に対して、上限値もしくは下限値に設定された変化量の絶対値分を加味した値を今回の制御周期でのロングターム補正量に設定する。具体的には、ロングターム補正量の変化量が正の値であった場合には上限値もしくは下限値分を加算した値、負の値であった場合には上限値もしくは下限値分を減算した値を今回の制御周期でのロングターム補正量に設定する。このようにして、ロングターム補正量に上下限ガードが掛けられ、ロングターム補正量の変化量が想定される値から離れた値に設定されることを防止することができる。
【0042】
なお、これらステップ120およびステップ125の処理は、補正量演算手段12bによって実行されるが、補正量演算手段12bのうちこれらの処理を行う部分が0点長期変化補正量設定手段に相当し、長時間での0点の変化量を抽出するためのフィルタが長周期フィルタ手段に相当する。
【0043】
続いて、ステップ130〜ステップ150ではショートターム補正処理を実行する。まず、ステップ130では、ショートターム補正量演算およびフィルタ処理を行う。ショートターム補正量演算でも、ステップ115で演算したGセンサ偏差Diff#Gxに基づいてショートターム補正量(仮ショートターム補正量)を演算する。ここでも、所定の制御周期毎に演算されたGセンサ偏差Diff#Gxを蓄積していき、蓄積したGセンサ偏差Diff#Gxの移動平均を演算することによってショートターム補正量を演算している。例えば、制御周期が第2所定回数に達する毎(例えば制御周期の2周期毎)にGセンサ偏差Diff#Gxを記憶し、その総和を第2所定回数にて割ることでGセンサ偏差Diff#Gxの平均値を求めるということを繰り返し、Gセンサ偏差Diff#Gxの移動平均を演算する。そして、フィルタ処理として、ノイズ除去のために、求めたGセンサ偏差Diff#Gxの移動平均をローパスフィルタに掛ける。ローパスフィルタについては、ショートターム補正量の演算が短時間に行われることから、その短時間に合せて設定している。これにより、Gセンサ偏差Diff#Gxの移動平均から高周波成分を取り除いたものがショートターム補正量として設定される。
【0044】
また、ステップ135では、ステップ130で設定されたショートターム補正量の変化量に上下限ガードを掛ける。上下限ガードとは、ステップ130で設定された仮のショートターム補正量の変化量の絶対値が想定される上限値(最大補正量)を超えていたり、下限値(最小補正量)を下回っていた場合に、ショートターム補正量の変化量の絶対値をその上限値もしくは下限値に設定することで、ショートターム補正量の変化量にガードを掛けるものである。そして、上下限ガードが掛けられる場合には、前回の制御周期の際に設定されたショートターム補正量に対して、上限値もしくは下限値に設定された変化量の絶対値分を加味した値を今回の制御周期でのショートターム補正量に設定する。具体的には、ショートターム補正量の変化量が正の値であった場合には上限値もしくは下限値分を加算した値、負の値であった場合には上限値もしくは下限値分を減算した値を今回の制御周期でのショートターム補正量に設定する。このようにして、ショートターム補正量に上下限ガードが掛けられ、ショートターム補正量の変化量が想定される値から離れた値に設定されることを防止することができる。
【0045】
なお、これらステップ130およびステップ135の処理も、補正量演算手段12bによって実行されるが、補正量演算手段12bのうちこれらの処理を行う部分が0点短期変化補正量設定手段に相当し、短時間での0点の変化量を抽出するためのフィルタが短周期フィルタ手段に相当する。
【0046】
ここで、上記ステップ120のロングターム補正量の演算の際とステップ130のショートターム補正量の演算の際の両方でGセンサ偏差Diff#Gxを用いているが、移動平均を求める際のGセンサ偏差Diff#Gxの数を異ならせており、ロングターム補正量の演算の際の第1所定回数の方がショートターム演算の際の第2所定回数よりも回数を多くしている。
【0047】
ロングターム補正量の演算では、長時間にサンプリングされたGセンサ偏差Diff#Gxを利用し、長時間のGセンサ偏差Diff#Gxの分布の中央値を演算することを想定している。つまり、経時変化による長時間の緩やかな0点の変化の影響が含まれ、かつ、比較的短時間の0点の変化の影響が少なくなるように、移動平均の演算に用いているGセンサ偏差Diff#Gxの数を多くしている。一方、ショートターム補正量の演算では、比較的短時間にサンプリングされたGセンサ偏差Diff#Gxを利用し、比較的短時間のGセンサ偏差Diff#Gxの変化が含まれるようにしている。つまり、温度変化や車両への積載等による比較的短時間の変化の影響が含まれ、かつ、その変化の影響が大きく現れるように、移動平均の演算に用いているGセンサ偏差Diff#Gxの数を少なくしている。このため、上記のように、ロングターム補正量の演算の際の第1所定回数の方がショートターム演算の際の第2所定回数よりも回数を多くしている。
【0048】
この後、ステップ140に進み、ショートターム補正量が不感帯の範囲外であるか否かを判定する。ここで、不感帯とは、ショートターム補正量の絶対値が所定値以下の場合を示しており、Gセンサ2の出力値にノイズが乗った場合などに発生する微小な補正量を除去するために、ショートターム補正量が不感帯の範囲内に含まれる場合にはショートターム補正が行われないようにする。
【0049】
このため、ステップ140で肯定判定されるとステップ145に進み、不感帯処理として、ステップ130で演算されたショートターム補正量もしくはステップ135で設定された上下限ガードが掛けられたショートターム補正量から不感帯として設定されている所定値分を減らした値を新たなショートターム補正量に設定する。具体的には、ショートターム補正量がプラスマイナスいずれの値にもなり得るため、ショートターム補正量の絶対値が減るように、ショートターム補正量が正の値であればショートターム補正量から所定値分を減算した値、ショートターム補正量が負の値であればショートターム補正量から所定値分を加算した値を新たなショートターム補正量に設定する。
【0050】
また、ステップ140で否定判定されるとステップ150に進み、不感帯処理として、ステップ130で演算されたショートターム補正量もしくはステップ135で設定された上下限ガードが掛けられたショートターム補正量を0に設定する。
【0051】
そして、ステップ155に進み、ロングターム補正量とショートターム補正量を加味した調停後補正量ΔGxを演算する。具体的には、ステップ120で設定されたロングターム補正量もしくはステップ125で上下限ガードが掛けられたショートターム補正量に対してステップ145もしくはステップ150で設定されたショートターム補正量を加算することで、調停後補正量ΔGxを演算する。この後、ステップ160に進み、今回の制御周期の際にGセンサ2の出力値が示す加速度Gx0からステップ155で演算された調停後補正量ΔGxを減算することにより、0点補正後のGセンサ値Gxが演算される。また、同時に調停後補正量ΔGxを前回の加速度補正量ΔGx#lastとして記憶して、処理を終了する。
【0052】
一方、上記したステップ105やステップ110で否定判定された場合には、ステップ165に進む。この場合には、0点補正の補正量(つまり加速度補正量ΔGx#last)を更新することは相応しくないことから、既に記憶されている前回の加速度補正量ΔGx#lastを用いて、今回の制御周期の際にGセンサ2の出力値が示す加速度Gx0から前回の加速度補正量ΔGx#lastを差し引くことにより、0点補正後のGセンサ値Gxを演算する。このようにして、Gセンサ0点補正処理が完了する。
【0053】
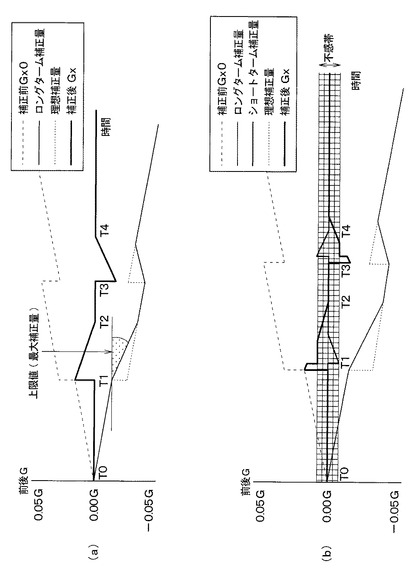
図3は、上記のようなGセンサ0点補正処理が行われる場合のタイミングチャートを示してある。図3(a)は、ロングターム補正処理による加速度Gx0の0点補正を行った場合の様子を示しており、図3(b)は、ロングターム補正処理後にショートターム補正処理による加速度Gx0の0点補正を行った場合の様子を示している。
【0054】
なお、上記図2に示したフローチャートでは、ロングターム補正量とショートターム補正量を求めて、それらを足した値を調停後補正量ΔGxとしてGセンサ2の出力値が示す補正前の加速度Gx0から差し引いているため、図3(a)のようなロングターム補正処理のみを差し引くような処理を行ってはいない。ここでは、ロングターム補正処理の理解の容易化のために、図3(a)に示すタイミングチャートを示してある。また、ロングターム補正処理が補正対象とする経時変化などによる長時間での緩やかな0点の変化が起こり得る時間は、例えば何年という長いスパンであるため、実際にはショートターム補正処理の対象となる比較的短時間での0点の変化が起こり得る時間と比較して、図3に示した以上に大きな差があるが、ここでは簡略化のため、ロングターム補正の補正対象となる長時間の緩やかな0点の変化が実際よりも短い期間で発生した形で記載してある。
【0055】
まず、図3(a)の時点T0から経時変化に伴って徐々にGセンサ2の出力値が示す加速度Gx0の0点がずれていったとする。その場合、上記したロングターム補正処理においてロングターム補正量が演算され、これが含まれる調停後補正量ΔGxが加速度Gx0から除かれる。これにより、Gセンサ2の出力値が示す補正前の加速度Gx0がロングターム補正量分差し引かれ、0点補正後のGセンサ値Gxは0.00Gとなり、0点のオフセットが取り除かれる。
【0056】
次に、時点T1において車両への積載に伴って0点がずれたとすると、その瞬間に急にステップ120で演算されるロングターム補正量が大きくなる。このため、理想的には図中破線で示したようにロングターム補正量が変化することになるが、ロングターム補正量の変化量が大きすぎて、ステップ125で説明した上下限ガードが掛けられることになる。したがって、ロングターム補正量の変化量の絶対値が上下限ガードで設定される上限値(最大補正量)で制限され、徐々に理想的なロングターム補正量に近づき、時点T2で理想的なロングターム補正量と一致する。
【0057】
そして、時点T3において車両への積載が無くなると、再びその瞬間に急にステップ120で演算されるロングターム補正量が小さくなる。このため、理想的には図中破線で示したようにロングターム補正量が変化することになるが、ロングターム補正量の変化量が大きすぎて、再び上下限ガードが掛けられることになる。したがって、ロングターム補正量の変化量の絶対値が上下限ガードで設定される上限値(最大補正量)で制限され、徐々に理想的なロングターム補正量に近づき、時点T4で理想的なロングターム補正量と一致する。
【0058】
続いて、図3(b)に示すように時点T0〜時点T1の期間中はショートターム補正処理での補正対象となる比較的短時間での0点の変化が生じていないため、ショートターム補正量は0となる。そして、時点T1において車両への積載があると、これに伴ってショートターム補正量が発生する。このショートターム補正量が不感帯の範囲外となる値になると、そのショートターム補正量から不感帯に相当する所定値が差し引かれた値が最終的なショートターム補正量に設定される。このショートターム補正量がロングターム補正量に加算されることで、調停後補正量ΔGxが演算され、Gセンサ2の出力値が示す補正前の加速度Gx0から差し引かれることで、0点補正後のGセンサ値Gxとされる。
【0059】
同様に、時点T3において車両への積載がなくなると、再びショートターム補正量が発生する。そして、時点T1の時と同様にしてショートターム補正量が設定され、このショートターム補正量がロングターム補正量に加算されることで、調停後補正量ΔGxが演算される。そして、Gセンサ2の出力値が示す補正前の加速度Gx0から調停後補正量ΔGxが差し引かれることで、0点補正後のGセンサ値Gxとされる。
【0060】
以上説明したように、ロングターム補正量とショートターム補正量とを合せて調停後補正量ΔGxを演算し、Gセンサ2の出力値が示す補正前の加速度Gx0から調停後補正量ΔGxを差し引くことで0点補正後のGセンサ値Gxを演算している。ロングターム補正量については、長周期のフィルタを掛けるロングターム補正処理によって求めている。Gセンサ2の出力値に対してローパスフィルタを掛けることで長時間の0点の変化を抽出したものをロングターム補正量として、Gセンサ2の出力値の長時間の0点の変化を補正するようにしている。また、ショートターム補正量については、ロングターム補正処理よりも短周期のフィルタを掛けるショートターム補正処理によって求めている。Gセンサ2の出力値に対応する比較的短時間に起こる0点の変化量に対応するショートターム補正量を求めると共に、ショートターム補正量に不感帯を設け、その不感帯の範囲を超える部分を抽出し、それを最終的なショートターム補正量として、Gセンサ2の出力値の短時間の0点の変化を補正するようにしている。
【0061】
これにより、長時間の0点の変化をロングターム補正量によって確実に補正し、さらに比較的短時間の0点の変化をショートターム補正量によって確実に補正できる。そして、ショートターム補正量については、不感帯を設けているため、ノイズ除去が行なえ、より適切に短時間の0点の変化を補正できる。したがって、経時変化による長時間の緩やかな0点の変化と、温度変化や車両への積載等の比較的短時間の0点の変化の双方に対応した0点補正を行うことができるGセンサ2の出力補正装置1とすることが可能となる。
【0062】
(他の実施形態)
上記実施形態では、蓄積したGセンサ偏差Diff#Gxに基づいてロングターム補正量やショートターム補正量を演算してからフィルタ処理を行うことにより、長時間の0点の変化量や比較的短時間の0点の変化量を抽出するようにしている。しかしながら、これの長時間の0点の変化量や比較的短時間の0点の変化量の抽出方法の一例を示したに過ぎず、Gセンサ2の出力値に対応する値(例えば、出力値そのものやGセンサ偏差Diff#Gx)に対して長周期フィルタ手段によってフィルタを掛けて長期間の0点の変化量を抽出したり、短周期フィルタ手段によってフィルタを掛けて比較的短期間の0点の変化量を抽出すれば良い。
【0063】
また、上記実施形態では、ロングターム補正量とショートターム補正量を求めて、それらを同時にGセンサ2の出力値が示す補正前の加速度Gx0から差し引いている。これに対して、補正前の加速度Gx0からロングターム補正量を差し引いた後の値に基づいてショートターム補正量を求めておき、その後、補正前の加速度Gx0からロングターム補正量を差し引いた後の値から更にショートターム補正量を差し引くことで、0点補正後のGセンサ値Gxを取得するようにしても良い。この場合、補正前の加速度Gx0からロングターム補正量を差し引いた後の値に基づいてショートターム補正量を求めることになるが、その場合も基本的にはGセンサ2の出力値が示す補正前の加速度Gx0に対応した値に基づいてショートターム補正量を求めていることになる。
【0064】
また、上記実施形態では、理想的にはGセンサ2の出力値に重力加速度成分が含まれていないであろう平坦路においてGセンサ2の0点補正を行うようにしており、エンジントルクを用いて平坦路であることを判定している。これは、上記実施形態では、エンジンが搭載された車両を前提として説明したためであり、エンジントルクを用いて平坦路の判定を行うようにしているが、勿論、車両を走行させるための駆動力を発生させる原動機であれば、エンジン以外のものの駆動力と車速との関係から平坦路の判定を行っても良い。
【符号の説明】
【0065】
1…出力補正装置、2…Gセンサ、3…車内LAN、4…各種制御ECU、5…メータ、6…ナビゲーションシステム、7…車輪速度センサ、8…エンジンECU、11…定常走行検出手段、11a…速度演算手段、11b…直進走行判定手段、11c…平坦路走行判定手段、11d…定速走行判定手段、11e…定常走行判定手段、12…Gセンサ補正ユニット、12a…前後G偏差演算手段、12b…補正量演算手段、12c…補正量調停手段
【技術分野】
【0001】
本発明は、車両の前後方向の加速度に応じた出力を発生させる加速度センサ(以下、Gセンサという)の出力を補正する出力補正装置に関するものである。
【背景技術】
【0002】
従来、特許文献1において、Gセンサの0点補正を行う技術が開示されている。具体的には、特許文献1では、路面勾配により推定された車両の前後方向の路面勾配に基づいてGセンサの0点補正を行っている。そして、路面勾配から想定されるGセンサの出力値と実際のGセンサの出力値とから0点からの変化量(オフセット量)を演算し、演算した変化量に対して、単一のフィルタ定数を持ったローパスフィルタを用いて高周波成分(ノイズ)を取り除くようにしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−250948号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、Gセンサの0点は、経時変化(経年変化)による長時間の緩やかな変化と、温度変化や車両への積載等による比較的短時間の変化の2つが合わさって変化するため、上記特許文献1に示されるような単一のフィルタ定数のローパスフィルタを用いて抽出した変化量に対して補正したのでは、双方の変化を精度良く補正することができない。
【0005】
本発明は上記点に鑑みて、経時変化による長時間の緩やかな0点の変化と、温度変化や車両への積載等の比較的短時間の0点の変化の双方に対応した0点補正を行うことができるGセンサの出力補正装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、請求項1に記載の発明は、Gセンサ(2)の0点が長時間経て変化する長時間の0点の変化に対する補正量となるロングターム補正量を設定する0点長期変化補正量設定手段(120、125)と、Gセンサ(2)の0点が比較的短時間で変化する比較的短時間の0点の変化に対する補正量となるショートターム補正量を設定する0点短期変化補正量設定手段(130、135)と、0点長期変化補正量設定手段(120、125)および0点短期変化補正量設定手段(130、135)で設定されたロングターム補正量およびショートターム補正量に基づいて、Gセンサ(2)の出力値を補正することで0点補正を行う補正手段(155〜165)と、を有した構成とされている。そして、0点長期変化補正手段(120、125)は、Gセンサ(2)の出力値に対応する値に対して長周期フィルタ手段によるフィルタを掛けることで長時間の0点の変化に対するロングターム補正量を設定し、0点短期変化補正手段(130、135)は、Gセンサ(2)の出力値に対応する値に対して短周期フィルタ手段によるフィルタを掛けることで短時間の0点の変化量に対する仮ショートターム補正量を設定すると共に、該仮ショートターム補正量が所定の不感帯の範囲を超えている部分を最終的なショートターム補正量として設定し、補正手段(155〜165)は、Gセンサ(2)の出力値からロングターム補正量およびショートターム補正量を差し引くことで、Gセンサ(2)の出力値の0点補正を行うことを特徴としている。
【0007】
このように、Gセンサ(2)の出力値からロングターム補正量およびショートターム補正量を差し引くことで0点補正を行うようにしている。これにより、長時間の0点の変化をロングターム補正量によって確実に補正し、さらに比較的短時間の0点の変化をショートターム補正量によって確実に補正できる。そして、ショートターム補正量については、不感帯を設けているため、ノイズ除去が行なえ、より適切に短時間の0点の変化を補正できる。したがって、経時変化による長時間の緩やかな0点の変化と、温度変化や車両への積載等の比較的短時間の0点の変化の双方に対応した0点補正を行うことができるGセンサ(2)の出力補正装置とすることが可能となる。
【0008】
請求項2に記載の発明では、さらに、車両に備えられた各車輪の車輪速度を演算すると共に、車両の車速を演算する速度演算手段(11a)と、車両を走行させる駆動力を発生する原動機の駆動力に関する情報を入力すると共に、速度演算手段(11a)で演算される車速を取得し、原動機の駆動力と車速とに基づいて、車両が平坦路を走行しているかを判定する平坦路走行判定手段(11c)と、速度演算手段(11a)で演算される各車輪の車輪速度に基づいて車両が直進走行しているか否かを判定する直進走行判定手段(11b)とを備え、平坦路走行判定手段にて車両が平坦路を走行していると判定され、かつ、直進走行判定手段(11b)にて車両が直進走行していると判定されると、0点長期変化補正手段(120、125)および0点短期変化補正手段(130、135)によるロングターム補正値およびショートターム補正値の設定を行うと共に、補正手段(155〜165)によるGセンサ(2)の出力値の0点補正を行うことを特徴としている。
【0009】
平坦路では理想的にはGセンサ(2)の出力値に重力加速度成分が含まれていないし、直進走行をしている状態では、車両旋回に起因するノイズなどが含まれない。このため、Gセンサ(2)の出力値が0でなければ、それが0点からの変化量(オフセット)となる。したがって、平坦路、かつ、車両が直進走行しているときであれば、最適に0点からの変化量を抽出することが可能となり、正確にGセンサ(2)の0点補正を行うことが可能となる。
【0010】
請求項3に記載の発明では、0点長期変化補正手段(120、125)は、ロングターム補正量の変化量の絶対値がその上限値を超えているときには当該上限値をロングターム補正量の変化量として、もしくは、ロングターム補正量の変化量の絶対値がその下限値を下回っているときには当該下限値をロングターム補正量の変化量として用いる上下限ガードを行ってロングターム補正量を設定することを特徴としている。
【0011】
このように、ロングターム補正量に上下限ガードを掛けることができる。これにより、ロングターム補正量の変化量が想定される値から離れた値に設定されることを防止することができる。
【0012】
請求項4に記載の発明では、0点短期変化補正手段(130、135)は、ショートターム補正量の変化量の絶対値がその上限値を超えているときには当該上限値をショートターム補正量の変化量として、もしくは、ショートターム補正量の変化量の絶対値がその下限値を下回っているときには当該下限値をショートターム補正量の変化量として用いる上下限ガードを行ってショートターム補正量を設定することを特徴としている。
【0013】
このように、ショートターム補正量についても上下限ガードを掛けることができる。これにより、ショートターム補正量の変化量が想定される値から離れた値に設定されることを防止することができる。
【0014】
なお、0点短期変化補正手段(130、135)で用いられる不感帯の範囲については、例えば請求項5に記載したように、想定されるノイズの値とGセンサ(2)の出力値を用いて実行する制御に影響を与えるGセンサ(2)の出力値の0点の変化量に基づいて設定することができる。
【0015】
上記請求項1ないし5では、本発明を車両用のGセンサの出力補正装置として把握したものであるが、請求項6に記載したように、本発明を車両用のGセンサの出力補正方法として把握することもできる。これにより、請求項1に記載の発明と同様の効果を得ることができる。
【0016】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【図面の簡単な説明】
【0017】
【図1】本発明の第1実施形態にかかるGセンサの出力補正装置が適用された車両制御システムのブロック構成を示した図である。
【図2】Gセンサ0点補正処理の詳細を示したフローチャートである。
【図3】Gセンサ0点補正処理が行われる場合のタイミングチャートであり、(a)は、ロングターム補正処理による加速度Gx0の0点補正を行った場合の様子を示すタイミングチャート、(b)は、ロングターム補正処理後にショートターム補正処理による加速度Gx0の0点補正を行った場合の様子を示すタイミングチャートである。
【発明を実施するための形態】
【0018】
以下、本発明の実施形態について図に基づいて説明する。
【0019】
(第1実施形態)
本発明の第1実施形態について説明する。ここでは、図を参照して本実施形態にかかるGセンサの0点補正を行う出力補正装置について説明する。
【0020】
図1は、本実施形態にかかるGセンサの出力補正装置が適用された車両制御システムのブロック構成を示した図である。この図を参照して車両制御システムの構成について説明する。
【0021】
図1に示すように、車両制御システムは、出力補正装置1によってGセンサ2の0点補正を行い、このGセンサ2の0点補正を行った後のGセンサ値Gxを車内LAN3を通じて各種制御ECU4、メータ5、ナビゲーションシステム6などに出力している。そして、例えば各種制御ECU4等で、0点補正後のGセンサ値Gxを用いて車両制御等を実行する。なお、出力補正装置1は、ECU等によって構成されるが、0点補正を行うために設けられた独立のECUである必要はなく、例えばブレーキECUなどにおいてGセンサ2の0点補正を行う機能として組み込まれていても良い。
【0022】
出力補正装置1には、Gセンサ2や車輪速度センサ7の出力値が入力されると共にエンジンECU8からの情報が入力され、これらの入力に基づいてGセンサ2の0点補正を行っている。
【0023】
具体的には、出力補正装置1は、定常走行検出手段11や補正ユニット12を有した構成とされ、補正ユニット12が定常走行検出手段11から得た情報に基づいてGセンサ2の0点補正を実行する。
【0024】
定常走行検出手段11は、車両が定常走行中であることを検出する。定常走行とは、平坦路(水平路)において、直進走行している状態を想定しており、定常走行検出手段11は、車輪速度センサ7の出力値およびエンジンECU8からエンジントルクに関する情報を入力し、これらに基づいて車両が定常走行中であることを検出している。具体的には、定常走行検出手段11は、速度演算手段11a、直進走行判定手段11b、平坦路走行判定手段11c、定速走行判定手段11dおよび定常走行判定手段11eを有した構成とされている。
【0025】
速度演算手段11aは、車輪速度センサ7の出力値に基づいて各車輪の車輪速度を演算すると共に、演算した車輪速度に基づいて周知の手法によって車速(推定車体速度)を演算する。
【0026】
直進走行判定手段11bは、速度演算手段11aで演算された各車輪の車輪速度に基づいて、車両が直進走行中であることを検出する。例えば、直進走行判定手段11bは、各車輪速度の差、例えば左車輪と右車輪の車輪速度が所定範囲以内であれば、直進走行中であると判定している。
【0027】
平坦路走行判定手段11cは、車両が平坦路を走行中であるか否かを判定する。例えば、平坦路走行判定手段11cは、エンジンECU8からエンジントルクに関する情報を取得すると、取得したエンジントルクに対応して想定される車速が速度演算手段11aで演算された車速と一致しているか否か(例えばこれらの車速の差が所定範囲内であるか否か)を判定し、一致していれば(車速の差が所定範囲内であれば)、平坦路であると判定している。
【0028】
定速走行判定手段11dは、車両が定速走行中であるか否かを判定している。例えば、定速走行であることは、速度演算手段11aが演算した車速が一定値であることなどに基づいて判定することができる。なお、定常走行の必須条件には、車両が定速走行中であることは含まれないが、定速走行中には加速度成分の影響が含まれず、より正確なGセンサ2の変化量(オフセット量)を演算できることから、本実施形態では、定速走行中であることも定常走行中であると判定される条件の1つに含めている。ただし、前述したように、定速走行中であることは定常走行の必須条件ではないため、定速走行中の条件を外して定常走行を判定しても良い。
【0029】
定常走行判定手段11eは、直進走行判定手段11b、平坦路走行判定手段11cおよび定速走行判定手段11dでの判定結果に基づいて、車両が定常走行中か否かの判定を行う。すなわち、定常走行判定手段11eは、直進走行判定手段11bで直進走行中であると判定され、平坦路走行判定手段11cにて平坦路走行中と判定され、定速走行判定手段11dで定速走行中と判定されると、車両が定常走行中と判定する。そして、定常走行判定手段11eにて定常走行中と判定されると、定常走行検出手段11の検出結果として定常走行中であること、つまりGセンサ2の0点補正の補正許可を示す出力をGセンサ補正ユニット12に出力する。
【0030】
Gセンサ補正ユニットは、前後G偏差演算手段12aと補正量演算手段12bおよび補正量調停手段12cを有した構成とされている。
【0031】
前後G偏差演算手段12aは、Gセンサ2の出力値に基づいて、定常走行中の加速度Gx0を求めると共に、Gセンサ偏差Diff#Gxを演算する。Gセンサ偏差Diff#Gxは、Gセンサ2の出力値が示す加速度Gx0の本来の加速度からの変化量(オフセット量)であり、Gセンサ2の出力値から求めた加速度Gx0から速度演算手段11aで演算された車速を微分して演算される演算加速度DVT0、つまり本来取り出したい加速度を差し引いた値との差として演算される。このGセンサ偏差Diff#Gxには、経時変化(経年変化)による長時間の緩やかな0点の変化(オフセット)と、温度変化や車両への積載等による比較的短時間の0点の変化(オフセット)の2つが含まれている。
【0032】
補正量演算手段12bは、前後G偏差演算手段12aにて演算されたGセンサ偏差Diff#Gxに基づいて、2つのオフセットに応じた補正量を演算する。例えば、補正量演算手段12bでは、Gセンサ偏差Diff#Gxに基づいて、移動平均の演算などに基づいて長時間の緩やかな0点の変化に起因するオフセットに対応した補正量(以下、ロングターム補正量という)や比較的短時間の0点の変化に起因するオフセットに対応した補正量(以下、ショートターム補正量という)を演算する。また、補正量演算手段12bでは、各補正量の変化量に上下限ガードを掛けたり、ショートターム補正量に基づく補正を行う際に不感帯を設けたりして、最終的なロングターム補正量やショートターム補正量を演算している。不感帯の幅は、想定されるノイズの値と、各種制御に影響を与えるGセンサ2の0点の変化量の両方を考慮して設定している。
【0033】
補正量調停手段12cは、補正量演算手段12bで演算したロングターム補正量やショートターム補正量に基づいて、Gセンサ2の0点補正を行う。この補正量調停手段12cにより、0点補正後のGセンサ値Gxが演算され、このGセンサ値Gxが車内LAN3を通じて、各種制御ECU4、メータ5、ナビゲーションシステム6などに出力される。
【0034】
以上のようにして、本実施形態にかかるGセンサ2の出力補正装置1が構成されている。続いて、このように構成された出力補正装置1が実行するGセンサ0点補正処理について説明する。
【0035】
図2は、Gセンサ0点補正処理の詳細を示したフローチャートである。この図に示すGセンサ0点補正処理は、イグニッションスイッチがオンされている際に所定の制御周期(例えば5秒)毎に実行される。
【0036】
まず、ステップ100では、Gセンサ2の出力値や車輪速度センサ7の出力値の取り込み、および、エンジンECU8からの情報取得に基づいて、加速度Gx0や各車輪の車輪速度VW**(なお、**は、各車輪を示す添え字であり、左前輪FL、右前輪FR、左後輪RL、右後輪RRの4輪を意味している)およびエンジントルクの取り込みを行う。続いて、ステップ105では、イグニッションスイッチがオンされた直後ではないか否かを判定する。すなわち、イグニッションスイッチがオンされた直後には、アイドリングが安定しておらず、エンジントルクと車速との関係が理想的な関係になっていない。このため、イグニッションスイッチがオンされた直後にはGセンサ2の0点補正に用いる補正量を更新するのには相応しくないとして、本ステップ105で肯定判定された場合にのみ、0点補正に用いる補正量の更新および0点補正を行うための処理に進むようにしている。例えば、各種制御ECU4やエンジンECU8などで起動されてからの経過時間をカウンタでカウントしていることから、そのカウント値を車内LAN3などを通じて取得し、カウント値が所定値未満であればイグニッションスイッチがオンされた直後であると判定している。
【0037】
更に、ステップ110では、Gセンサ補正許可条件を満たしているか否かを判定している。Gセンサ補正許可条件とは、Gセンサ2の0点補正に用いる補正量の更新を行って良いことを示す条件であり、ここでは、車両が定常走行中であること、つまり平坦路において直進走行中であることをGセンサ補正許可条件としている。平坦路では理想的にはGセンサ2の出力値に重力加速度成分が含まれていないし、直進走行をしている状態では、車両旋回に起因するノイズなどが含まれないことから、Gセンサ2の出力値が0でなければ、それが0点からの変化量(オフセット)となり、最適に0点からの変化量を抽出することが可能となる。
【0038】
このため、定常走行検出手段11で車両が定常走行中であることが検出されてその旨を示す出力が出されていると、Gセンサ補正許可条件を満たしていると判定している。ここで肯定判定されると、次のステップ115〜160において、0点補正に用いる補正量の更新および0点補正を行うための処理に進むようにしている。これらの処理は、上記したGセンサ補正ユニット12に含まれる前後G偏差演算手段12aや補正量演算手段12bもしくは補正量調停手段12cにて実行される。
【0039】
ステップ115では、Gセンサ偏差演算を行う。この処理は、前後G偏差演算手段12aにて実行され、Gセンサ2の出力値が示す加速度Gx0から速度演算手段11aで演算された車速を微分して演算される演算加速度DVT0、つまり本来取り出したい加速度を差し引いた値であるGセンサ偏差Diff#Gxが演算される。
【0040】
次に、ステップ120およびステップ125ではロングターム補正処理を実行する。まず、ステップ120では、ロングターム補正量演算およびフィルタ処理を行う。ロングターム補正量演算では、ステップ115で演算したGセンサ偏差Diff#Gxに基づいてロングターム補正量を演算する。ロングターム補正量は、Gセンサ2の搭載状態等に応じて正負いずれの値にも取り得る。ここでは、所定の制御周期毎に演算されたGセンサ偏差Diff#Gxを蓄積していき、蓄積したGセンサ偏差Diff#Gxの移動平均を演算することによってロングターム補正量を演算している。例えば、制御周期が第1所定回数に達する毎(例えば制御周期の60周期毎)にGセンサ偏差Diff#Gxを記憶し、その総和を第1所定回数にて割ることでGセンサ偏差Diff#Gxの平均値を求めるということを繰り返し、Gセンサ偏差Diff#Gxの移動平均を演算する。そして、フィルタ処理として、ノイズ除去のために、求めたGセンサ偏差Diff#Gxの移動平均をローパスフィルタに掛ける。ローパスフィルタについては、ロングターム補正量の演算が長時間に行われることから、その長時間に合せて設定している。これにより、Gセンサ偏差Diff#Gxの移動平均から高周波成分を取り除いたものがロングターム補正量として設定される。
【0041】
また、ステップ125では、ステップ120で設定されたロングターム補正量の変化量に上下限ガードを掛ける。上下限ガードとは、ステップ120で設定されたロングターム補正量の変化量の絶対値が想定される上限値(最大補正量)を超えていたり、下限値(最小補正量)を下回っていた場合に、ロングターム補正量の変化量の絶対値をその上限値もしくは下限値に設定することで、ロングターム補正量の変化量にガードを掛けるものである。そして、上下限ガードが掛けられる場合には、前回の制御周期の際に設定されたロングターム補正量に対して、上限値もしくは下限値に設定された変化量の絶対値分を加味した値を今回の制御周期でのロングターム補正量に設定する。具体的には、ロングターム補正量の変化量が正の値であった場合には上限値もしくは下限値分を加算した値、負の値であった場合には上限値もしくは下限値分を減算した値を今回の制御周期でのロングターム補正量に設定する。このようにして、ロングターム補正量に上下限ガードが掛けられ、ロングターム補正量の変化量が想定される値から離れた値に設定されることを防止することができる。
【0042】
なお、これらステップ120およびステップ125の処理は、補正量演算手段12bによって実行されるが、補正量演算手段12bのうちこれらの処理を行う部分が0点長期変化補正量設定手段に相当し、長時間での0点の変化量を抽出するためのフィルタが長周期フィルタ手段に相当する。
【0043】
続いて、ステップ130〜ステップ150ではショートターム補正処理を実行する。まず、ステップ130では、ショートターム補正量演算およびフィルタ処理を行う。ショートターム補正量演算でも、ステップ115で演算したGセンサ偏差Diff#Gxに基づいてショートターム補正量(仮ショートターム補正量)を演算する。ここでも、所定の制御周期毎に演算されたGセンサ偏差Diff#Gxを蓄積していき、蓄積したGセンサ偏差Diff#Gxの移動平均を演算することによってショートターム補正量を演算している。例えば、制御周期が第2所定回数に達する毎(例えば制御周期の2周期毎)にGセンサ偏差Diff#Gxを記憶し、その総和を第2所定回数にて割ることでGセンサ偏差Diff#Gxの平均値を求めるということを繰り返し、Gセンサ偏差Diff#Gxの移動平均を演算する。そして、フィルタ処理として、ノイズ除去のために、求めたGセンサ偏差Diff#Gxの移動平均をローパスフィルタに掛ける。ローパスフィルタについては、ショートターム補正量の演算が短時間に行われることから、その短時間に合せて設定している。これにより、Gセンサ偏差Diff#Gxの移動平均から高周波成分を取り除いたものがショートターム補正量として設定される。
【0044】
また、ステップ135では、ステップ130で設定されたショートターム補正量の変化量に上下限ガードを掛ける。上下限ガードとは、ステップ130で設定された仮のショートターム補正量の変化量の絶対値が想定される上限値(最大補正量)を超えていたり、下限値(最小補正量)を下回っていた場合に、ショートターム補正量の変化量の絶対値をその上限値もしくは下限値に設定することで、ショートターム補正量の変化量にガードを掛けるものである。そして、上下限ガードが掛けられる場合には、前回の制御周期の際に設定されたショートターム補正量に対して、上限値もしくは下限値に設定された変化量の絶対値分を加味した値を今回の制御周期でのショートターム補正量に設定する。具体的には、ショートターム補正量の変化量が正の値であった場合には上限値もしくは下限値分を加算した値、負の値であった場合には上限値もしくは下限値分を減算した値を今回の制御周期でのショートターム補正量に設定する。このようにして、ショートターム補正量に上下限ガードが掛けられ、ショートターム補正量の変化量が想定される値から離れた値に設定されることを防止することができる。
【0045】
なお、これらステップ130およびステップ135の処理も、補正量演算手段12bによって実行されるが、補正量演算手段12bのうちこれらの処理を行う部分が0点短期変化補正量設定手段に相当し、短時間での0点の変化量を抽出するためのフィルタが短周期フィルタ手段に相当する。
【0046】
ここで、上記ステップ120のロングターム補正量の演算の際とステップ130のショートターム補正量の演算の際の両方でGセンサ偏差Diff#Gxを用いているが、移動平均を求める際のGセンサ偏差Diff#Gxの数を異ならせており、ロングターム補正量の演算の際の第1所定回数の方がショートターム演算の際の第2所定回数よりも回数を多くしている。
【0047】
ロングターム補正量の演算では、長時間にサンプリングされたGセンサ偏差Diff#Gxを利用し、長時間のGセンサ偏差Diff#Gxの分布の中央値を演算することを想定している。つまり、経時変化による長時間の緩やかな0点の変化の影響が含まれ、かつ、比較的短時間の0点の変化の影響が少なくなるように、移動平均の演算に用いているGセンサ偏差Diff#Gxの数を多くしている。一方、ショートターム補正量の演算では、比較的短時間にサンプリングされたGセンサ偏差Diff#Gxを利用し、比較的短時間のGセンサ偏差Diff#Gxの変化が含まれるようにしている。つまり、温度変化や車両への積載等による比較的短時間の変化の影響が含まれ、かつ、その変化の影響が大きく現れるように、移動平均の演算に用いているGセンサ偏差Diff#Gxの数を少なくしている。このため、上記のように、ロングターム補正量の演算の際の第1所定回数の方がショートターム演算の際の第2所定回数よりも回数を多くしている。
【0048】
この後、ステップ140に進み、ショートターム補正量が不感帯の範囲外であるか否かを判定する。ここで、不感帯とは、ショートターム補正量の絶対値が所定値以下の場合を示しており、Gセンサ2の出力値にノイズが乗った場合などに発生する微小な補正量を除去するために、ショートターム補正量が不感帯の範囲内に含まれる場合にはショートターム補正が行われないようにする。
【0049】
このため、ステップ140で肯定判定されるとステップ145に進み、不感帯処理として、ステップ130で演算されたショートターム補正量もしくはステップ135で設定された上下限ガードが掛けられたショートターム補正量から不感帯として設定されている所定値分を減らした値を新たなショートターム補正量に設定する。具体的には、ショートターム補正量がプラスマイナスいずれの値にもなり得るため、ショートターム補正量の絶対値が減るように、ショートターム補正量が正の値であればショートターム補正量から所定値分を減算した値、ショートターム補正量が負の値であればショートターム補正量から所定値分を加算した値を新たなショートターム補正量に設定する。
【0050】
また、ステップ140で否定判定されるとステップ150に進み、不感帯処理として、ステップ130で演算されたショートターム補正量もしくはステップ135で設定された上下限ガードが掛けられたショートターム補正量を0に設定する。
【0051】
そして、ステップ155に進み、ロングターム補正量とショートターム補正量を加味した調停後補正量ΔGxを演算する。具体的には、ステップ120で設定されたロングターム補正量もしくはステップ125で上下限ガードが掛けられたショートターム補正量に対してステップ145もしくはステップ150で設定されたショートターム補正量を加算することで、調停後補正量ΔGxを演算する。この後、ステップ160に進み、今回の制御周期の際にGセンサ2の出力値が示す加速度Gx0からステップ155で演算された調停後補正量ΔGxを減算することにより、0点補正後のGセンサ値Gxが演算される。また、同時に調停後補正量ΔGxを前回の加速度補正量ΔGx#lastとして記憶して、処理を終了する。
【0052】
一方、上記したステップ105やステップ110で否定判定された場合には、ステップ165に進む。この場合には、0点補正の補正量(つまり加速度補正量ΔGx#last)を更新することは相応しくないことから、既に記憶されている前回の加速度補正量ΔGx#lastを用いて、今回の制御周期の際にGセンサ2の出力値が示す加速度Gx0から前回の加速度補正量ΔGx#lastを差し引くことにより、0点補正後のGセンサ値Gxを演算する。このようにして、Gセンサ0点補正処理が完了する。
【0053】
図3は、上記のようなGセンサ0点補正処理が行われる場合のタイミングチャートを示してある。図3(a)は、ロングターム補正処理による加速度Gx0の0点補正を行った場合の様子を示しており、図3(b)は、ロングターム補正処理後にショートターム補正処理による加速度Gx0の0点補正を行った場合の様子を示している。
【0054】
なお、上記図2に示したフローチャートでは、ロングターム補正量とショートターム補正量を求めて、それらを足した値を調停後補正量ΔGxとしてGセンサ2の出力値が示す補正前の加速度Gx0から差し引いているため、図3(a)のようなロングターム補正処理のみを差し引くような処理を行ってはいない。ここでは、ロングターム補正処理の理解の容易化のために、図3(a)に示すタイミングチャートを示してある。また、ロングターム補正処理が補正対象とする経時変化などによる長時間での緩やかな0点の変化が起こり得る時間は、例えば何年という長いスパンであるため、実際にはショートターム補正処理の対象となる比較的短時間での0点の変化が起こり得る時間と比較して、図3に示した以上に大きな差があるが、ここでは簡略化のため、ロングターム補正の補正対象となる長時間の緩やかな0点の変化が実際よりも短い期間で発生した形で記載してある。
【0055】
まず、図3(a)の時点T0から経時変化に伴って徐々にGセンサ2の出力値が示す加速度Gx0の0点がずれていったとする。その場合、上記したロングターム補正処理においてロングターム補正量が演算され、これが含まれる調停後補正量ΔGxが加速度Gx0から除かれる。これにより、Gセンサ2の出力値が示す補正前の加速度Gx0がロングターム補正量分差し引かれ、0点補正後のGセンサ値Gxは0.00Gとなり、0点のオフセットが取り除かれる。
【0056】
次に、時点T1において車両への積載に伴って0点がずれたとすると、その瞬間に急にステップ120で演算されるロングターム補正量が大きくなる。このため、理想的には図中破線で示したようにロングターム補正量が変化することになるが、ロングターム補正量の変化量が大きすぎて、ステップ125で説明した上下限ガードが掛けられることになる。したがって、ロングターム補正量の変化量の絶対値が上下限ガードで設定される上限値(最大補正量)で制限され、徐々に理想的なロングターム補正量に近づき、時点T2で理想的なロングターム補正量と一致する。
【0057】
そして、時点T3において車両への積載が無くなると、再びその瞬間に急にステップ120で演算されるロングターム補正量が小さくなる。このため、理想的には図中破線で示したようにロングターム補正量が変化することになるが、ロングターム補正量の変化量が大きすぎて、再び上下限ガードが掛けられることになる。したがって、ロングターム補正量の変化量の絶対値が上下限ガードで設定される上限値(最大補正量)で制限され、徐々に理想的なロングターム補正量に近づき、時点T4で理想的なロングターム補正量と一致する。
【0058】
続いて、図3(b)に示すように時点T0〜時点T1の期間中はショートターム補正処理での補正対象となる比較的短時間での0点の変化が生じていないため、ショートターム補正量は0となる。そして、時点T1において車両への積載があると、これに伴ってショートターム補正量が発生する。このショートターム補正量が不感帯の範囲外となる値になると、そのショートターム補正量から不感帯に相当する所定値が差し引かれた値が最終的なショートターム補正量に設定される。このショートターム補正量がロングターム補正量に加算されることで、調停後補正量ΔGxが演算され、Gセンサ2の出力値が示す補正前の加速度Gx0から差し引かれることで、0点補正後のGセンサ値Gxとされる。
【0059】
同様に、時点T3において車両への積載がなくなると、再びショートターム補正量が発生する。そして、時点T1の時と同様にしてショートターム補正量が設定され、このショートターム補正量がロングターム補正量に加算されることで、調停後補正量ΔGxが演算される。そして、Gセンサ2の出力値が示す補正前の加速度Gx0から調停後補正量ΔGxが差し引かれることで、0点補正後のGセンサ値Gxとされる。
【0060】
以上説明したように、ロングターム補正量とショートターム補正量とを合せて調停後補正量ΔGxを演算し、Gセンサ2の出力値が示す補正前の加速度Gx0から調停後補正量ΔGxを差し引くことで0点補正後のGセンサ値Gxを演算している。ロングターム補正量については、長周期のフィルタを掛けるロングターム補正処理によって求めている。Gセンサ2の出力値に対してローパスフィルタを掛けることで長時間の0点の変化を抽出したものをロングターム補正量として、Gセンサ2の出力値の長時間の0点の変化を補正するようにしている。また、ショートターム補正量については、ロングターム補正処理よりも短周期のフィルタを掛けるショートターム補正処理によって求めている。Gセンサ2の出力値に対応する比較的短時間に起こる0点の変化量に対応するショートターム補正量を求めると共に、ショートターム補正量に不感帯を設け、その不感帯の範囲を超える部分を抽出し、それを最終的なショートターム補正量として、Gセンサ2の出力値の短時間の0点の変化を補正するようにしている。
【0061】
これにより、長時間の0点の変化をロングターム補正量によって確実に補正し、さらに比較的短時間の0点の変化をショートターム補正量によって確実に補正できる。そして、ショートターム補正量については、不感帯を設けているため、ノイズ除去が行なえ、より適切に短時間の0点の変化を補正できる。したがって、経時変化による長時間の緩やかな0点の変化と、温度変化や車両への積載等の比較的短時間の0点の変化の双方に対応した0点補正を行うことができるGセンサ2の出力補正装置1とすることが可能となる。
【0062】
(他の実施形態)
上記実施形態では、蓄積したGセンサ偏差Diff#Gxに基づいてロングターム補正量やショートターム補正量を演算してからフィルタ処理を行うことにより、長時間の0点の変化量や比較的短時間の0点の変化量を抽出するようにしている。しかしながら、これの長時間の0点の変化量や比較的短時間の0点の変化量の抽出方法の一例を示したに過ぎず、Gセンサ2の出力値に対応する値(例えば、出力値そのものやGセンサ偏差Diff#Gx)に対して長周期フィルタ手段によってフィルタを掛けて長期間の0点の変化量を抽出したり、短周期フィルタ手段によってフィルタを掛けて比較的短期間の0点の変化量を抽出すれば良い。
【0063】
また、上記実施形態では、ロングターム補正量とショートターム補正量を求めて、それらを同時にGセンサ2の出力値が示す補正前の加速度Gx0から差し引いている。これに対して、補正前の加速度Gx0からロングターム補正量を差し引いた後の値に基づいてショートターム補正量を求めておき、その後、補正前の加速度Gx0からロングターム補正量を差し引いた後の値から更にショートターム補正量を差し引くことで、0点補正後のGセンサ値Gxを取得するようにしても良い。この場合、補正前の加速度Gx0からロングターム補正量を差し引いた後の値に基づいてショートターム補正量を求めることになるが、その場合も基本的にはGセンサ2の出力値が示す補正前の加速度Gx0に対応した値に基づいてショートターム補正量を求めていることになる。
【0064】
また、上記実施形態では、理想的にはGセンサ2の出力値に重力加速度成分が含まれていないであろう平坦路においてGセンサ2の0点補正を行うようにしており、エンジントルクを用いて平坦路であることを判定している。これは、上記実施形態では、エンジンが搭載された車両を前提として説明したためであり、エンジントルクを用いて平坦路の判定を行うようにしているが、勿論、車両を走行させるための駆動力を発生させる原動機であれば、エンジン以外のものの駆動力と車速との関係から平坦路の判定を行っても良い。
【符号の説明】
【0065】
1…出力補正装置、2…Gセンサ、3…車内LAN、4…各種制御ECU、5…メータ、6…ナビゲーションシステム、7…車輪速度センサ、8…エンジンECU、11…定常走行検出手段、11a…速度演算手段、11b…直進走行判定手段、11c…平坦路走行判定手段、11d…定速走行判定手段、11e…定常走行判定手段、12…Gセンサ補正ユニット、12a…前後G偏差演算手段、12b…補正量演算手段、12c…補正量調停手段
【特許請求の範囲】
【請求項1】
車両の前後方向の加速度を検出する加速度センサ(2)の出力値が加速度の発生していないときに想定される0点からずれていることを補正する車両用の加速度センサの出力補正装置であって、
前記加速度センサ(2)の0点が長時間経て変化する長時間の0点の変化に対する補正量となるロングターム補正量を設定する0点長期変化補正量設定手段(120、125)と、
前記加速度センサ(2)の0点が前記長時間よりも比較的短時間で変化する比較的短時間の0点の変化に対する補正量となるショートターム補正量を設定する0点短期変化補正量設定手段(130、135)と、
前記0点長期変化補正量設定手段(120、125)および前記0点短期変化補正量設定手段(130、135)で設定された前記ロングターム補正量および前記ショートターム補正量に基づいて、前記加速度センサ(2)の出力値を補正することで0点補正を行う補正手段(155〜165)と、を有し、
前記0点長期変化補正手段(120、125)は、前記加速度センサ(2)の出力値に対応する値に対して長周期フィルタ手段によるフィルタを掛けることで前記長時間の0点の変化に対する前記ロングターム補正量を設定し、
前記0点短期変化補正手段(130、135)は、前記加速度センサ(2)の出力値に対応する値に対して短周期フィルタ手段によるフィルタを掛けることで前記短時間の0点の変化量に対する仮ショートターム補正量を設定すると共に、該仮ショートターム補正量が所定の不感帯の範囲を超えている部分を最終的な前記ショートターム補正量として設定し、
前記補正手段(155〜165)は、前記加速度センサ(2)の出力値から前記ロングターム補正量および前記ショートターム補正量を差し引くことで、前記加速度センサ(2)の出力値の0点補正を行うことを特徴とする車両用の加速度センサの出力補正装置。
【請求項2】
前記車両に備えられた各車輪の車輪速度を演算すると共に、前記車両の車速を演算する速度演算手段(11a)と、
前記車両を走行させる駆動力を発生する原動機の駆動力に関する情報を入力すると共に、前記速度演算手段(11a)で演算される前記車速を取得し、前記原動機の駆動力と前記車速とに基づいて、前記車両が平坦路を走行しているかを判定する平坦路走行判定手段(11c)と、
前記速度演算手段(11a)で演算される前記各車輪の車輪速度に基づいて前記車両が直進走行しているか否かを判定する直進走行判定手段(11b)と、を更に有し、
前記平坦路走行判定手段にて前記車両が平坦路を走行していると判定され、かつ、前記直進走行判定手段(11b)にて前記車両が直進走行していると判定されると、前記0点長期変化補正手段(120、125)および前記0点短期変化補正手段(130、135)による前記ロングターム補正値および前記ショートターム補正値の設定を行うと共に、前記補正手段(155〜165)による前記加速度センサ(2)の出力値の0点補正を行うことを特徴とする請求項1に記載の車両用の加速度センサの出力補正装置。
【請求項3】
前記0点長期変化補正手段(120、125)は、前記ロングターム補正量の変化量の絶対値がその上限値を超えているときには当該上限値を前記ロングターム補正量の変化量として、もしくは、前記絶対値がその下限値を下回っているときには当該下限値を前記ロングターム補正量の変化量として用いる上下限ガードを行って前記ロングターム補正量を設定することを特徴とする請求項1または2に記載の車両用の加速度センサの出力補正装置。
【請求項4】
前記0点短期変化補正手段(130、135)は、前記ショートターム補正量の変化量の絶対値がその上限値を超えているときには当該上限値を前記ショートターム補正量の変化量として、もしくは、前記絶対値がその下限値を下回っているときには当該下限値を前記ショートターム補正量の変化量として用いる上下限ガードを行って前記ショートターム補正量を設定することを特徴とする請求項1ないし3のいずれか1つに記載の車両用の加速度センサの出力補正装置。
【請求項5】
前記0点短期変化補正手段(130、135)は、前記不感帯の範囲を想定されるノイズの値と前記加速度センサ(2)の出力値を用いて実行する制御に影響を与える前記加速度センサ(2)の出力値の0点の変化量に基づいて設定していることを特徴とする請求項1ないし4のいずれか1つに記載の車両用の加速度センサの出力補正装置。
【請求項6】
車両の前後方向の加速度を検出する加速度センサ(2)の出力値が加速度の発生していないときに想定される0点からずれていることを補正する車両用の加速度センサの出力補正方法であって、
前記加速度センサ(2)の0点が長時間経て変化する長時間の0点の変化に対する補正量となるロングターム補正量を設定するステップと、
前記加速度センサ(2)の0点が前記長時間よりも比較的短時間で変化する比較的短時間の0点の変化に対する補正量となるショートターム補正量を設定するステップと、
前記ロングターム補正量および前記ショートターム補正量に基づいて、前記加速度センサ(2)の出力値を補正することで0点補正を行うステップとを含み、
前記ロングターム補正量を設定するステップでは、前記加速度センサ(2)の出力値に対応する値に対して長周期フィルタ手段によるフィルタを掛けることで前記長時間の0点の変化に対する前記ロングターム補正量を設定し、
前記ショートターム補正量を設定するステップでは、前記加速度センサ(2)の出力値に対応する値に対して短周期フィルタ手段によるフィルタを掛けることで前記短時間の0点の変化量に対する仮ショートターム補正量を設定すると共に、該仮ショートターム補正量が所定の不感帯の範囲を超えている部分を最終的な前記ショートターム補正量として設定し、
前記0点補正を行うステップでは、前記加速度センサ(2)の出力値から前記ロングターム補正量および前記ショートターム補正量を差し引くことで、前記加速度センサ(2)の出力値の0点補正を行うことを特徴とする車両用の加速度センサの出力補正方法。
【請求項1】
車両の前後方向の加速度を検出する加速度センサ(2)の出力値が加速度の発生していないときに想定される0点からずれていることを補正する車両用の加速度センサの出力補正装置であって、
前記加速度センサ(2)の0点が長時間経て変化する長時間の0点の変化に対する補正量となるロングターム補正量を設定する0点長期変化補正量設定手段(120、125)と、
前記加速度センサ(2)の0点が前記長時間よりも比較的短時間で変化する比較的短時間の0点の変化に対する補正量となるショートターム補正量を設定する0点短期変化補正量設定手段(130、135)と、
前記0点長期変化補正量設定手段(120、125)および前記0点短期変化補正量設定手段(130、135)で設定された前記ロングターム補正量および前記ショートターム補正量に基づいて、前記加速度センサ(2)の出力値を補正することで0点補正を行う補正手段(155〜165)と、を有し、
前記0点長期変化補正手段(120、125)は、前記加速度センサ(2)の出力値に対応する値に対して長周期フィルタ手段によるフィルタを掛けることで前記長時間の0点の変化に対する前記ロングターム補正量を設定し、
前記0点短期変化補正手段(130、135)は、前記加速度センサ(2)の出力値に対応する値に対して短周期フィルタ手段によるフィルタを掛けることで前記短時間の0点の変化量に対する仮ショートターム補正量を設定すると共に、該仮ショートターム補正量が所定の不感帯の範囲を超えている部分を最終的な前記ショートターム補正量として設定し、
前記補正手段(155〜165)は、前記加速度センサ(2)の出力値から前記ロングターム補正量および前記ショートターム補正量を差し引くことで、前記加速度センサ(2)の出力値の0点補正を行うことを特徴とする車両用の加速度センサの出力補正装置。
【請求項2】
前記車両に備えられた各車輪の車輪速度を演算すると共に、前記車両の車速を演算する速度演算手段(11a)と、
前記車両を走行させる駆動力を発生する原動機の駆動力に関する情報を入力すると共に、前記速度演算手段(11a)で演算される前記車速を取得し、前記原動機の駆動力と前記車速とに基づいて、前記車両が平坦路を走行しているかを判定する平坦路走行判定手段(11c)と、
前記速度演算手段(11a)で演算される前記各車輪の車輪速度に基づいて前記車両が直進走行しているか否かを判定する直進走行判定手段(11b)と、を更に有し、
前記平坦路走行判定手段にて前記車両が平坦路を走行していると判定され、かつ、前記直進走行判定手段(11b)にて前記車両が直進走行していると判定されると、前記0点長期変化補正手段(120、125)および前記0点短期変化補正手段(130、135)による前記ロングターム補正値および前記ショートターム補正値の設定を行うと共に、前記補正手段(155〜165)による前記加速度センサ(2)の出力値の0点補正を行うことを特徴とする請求項1に記載の車両用の加速度センサの出力補正装置。
【請求項3】
前記0点長期変化補正手段(120、125)は、前記ロングターム補正量の変化量の絶対値がその上限値を超えているときには当該上限値を前記ロングターム補正量の変化量として、もしくは、前記絶対値がその下限値を下回っているときには当該下限値を前記ロングターム補正量の変化量として用いる上下限ガードを行って前記ロングターム補正量を設定することを特徴とする請求項1または2に記載の車両用の加速度センサの出力補正装置。
【請求項4】
前記0点短期変化補正手段(130、135)は、前記ショートターム補正量の変化量の絶対値がその上限値を超えているときには当該上限値を前記ショートターム補正量の変化量として、もしくは、前記絶対値がその下限値を下回っているときには当該下限値を前記ショートターム補正量の変化量として用いる上下限ガードを行って前記ショートターム補正量を設定することを特徴とする請求項1ないし3のいずれか1つに記載の車両用の加速度センサの出力補正装置。
【請求項5】
前記0点短期変化補正手段(130、135)は、前記不感帯の範囲を想定されるノイズの値と前記加速度センサ(2)の出力値を用いて実行する制御に影響を与える前記加速度センサ(2)の出力値の0点の変化量に基づいて設定していることを特徴とする請求項1ないし4のいずれか1つに記載の車両用の加速度センサの出力補正装置。
【請求項6】
車両の前後方向の加速度を検出する加速度センサ(2)の出力値が加速度の発生していないときに想定される0点からずれていることを補正する車両用の加速度センサの出力補正方法であって、
前記加速度センサ(2)の0点が長時間経て変化する長時間の0点の変化に対する補正量となるロングターム補正量を設定するステップと、
前記加速度センサ(2)の0点が前記長時間よりも比較的短時間で変化する比較的短時間の0点の変化に対する補正量となるショートターム補正量を設定するステップと、
前記ロングターム補正量および前記ショートターム補正量に基づいて、前記加速度センサ(2)の出力値を補正することで0点補正を行うステップとを含み、
前記ロングターム補正量を設定するステップでは、前記加速度センサ(2)の出力値に対応する値に対して長周期フィルタ手段によるフィルタを掛けることで前記長時間の0点の変化に対する前記ロングターム補正量を設定し、
前記ショートターム補正量を設定するステップでは、前記加速度センサ(2)の出力値に対応する値に対して短周期フィルタ手段によるフィルタを掛けることで前記短時間の0点の変化量に対する仮ショートターム補正量を設定すると共に、該仮ショートターム補正量が所定の不感帯の範囲を超えている部分を最終的な前記ショートターム補正量として設定し、
前記0点補正を行うステップでは、前記加速度センサ(2)の出力値から前記ロングターム補正量および前記ショートターム補正量を差し引くことで、前記加速度センサ(2)の出力値の0点補正を行うことを特徴とする車両用の加速度センサの出力補正方法。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−19837(P2013−19837A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2011−154814(P2011−154814)
【出願日】平成23年7月13日(2011.7.13)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成23年7月13日(2011.7.13)
【出願人】(301065892)株式会社アドヴィックス (1,291)
[ Back to top ]