
車両用の車線変更運転認識方法及び装置
本発明は、車両用の車線変更運転検知方法及び装置に関する。別の観測対象車両(15)の車線変更挙動を記述する少なくとも1つの観測変数が決定される。対象車両(15)がその対象車両(15)に関わる車線から車線変更しようとする意図を特徴づける車線変更変数(CV)が、前記少なくとも1つの観測変数に従って決定される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は車両用の車線変更運転検知方法及び装置に関する。
【0002】
本発明による方法及び装置は、例えば、車両に配置されるアダプティブクルーズコントロール装置として知られる縦方向制御装置を改善するために用いることができる。
【背景技術】
【0003】
先行技術から知られるアダプティブクルーズコントロール装置は、主として2つのグループに分類することができる。第1グループは単なるクルーズコントロール装置を含むが、この装置は、道路の勾配、風の抵抗、その他同類の状況があっても、設定された車両の縦速度を維持するものである。第2グループはアクティブクルーズコントロール装置を含んでおり、この装置は、レーダセンサを使用して、当該車両と前方走行車両との間の距離及び相対速度を制御する。アクティブクルーズコントロール装置が、前方を走行する低速車両を検知すると、当該車両と前方走行車両との間の所定の時間間隔が維持されるまで、当該車両の縦速度が、適切な制動減速を発生させることによって減速される。このような距離及び相対速度の制御は、運転の快適さを著しく高め、特に高速道路における長距離走行の場合に運転者の早い疲労を確実に防ぐ。
【0004】
しかし、装置に関わるいくつかの限界のために、従来のアクティブクルーズコントロール装置の運転者に対する支援は限られている。装置に関わる限界は、特に、アクティブクルーズコントロール装置に設定することができる最高及び最低縦速度、あるいは、アクティブクルーズコントロール装置に関連して利用し得る車両の最大制動減速度によってもたらされる。装置に関わるこれらの限界を超えた場合は、運転者自身が、アダプティブクルーズコントロールの機能を完全に遂行しなければならない。これに該当するのは、特に、前方走行車両が非常に急速に接近してきた場合、前方走行車両が急に減速した場合、別の車両が突然車線変更運転して当該車両の車線に割り込んできた場合、あるいは、運転者が、アクティブクルーズコントロール装置に設定し得る当該車両の最高又は最低縦速度よりも高いか又は低い縦速度を欲した場合等である。
【0005】
この点については、別の車両が突然割り込んでくる結果をもたらす車線変更運転が特に危険であることが判明している。なぜなら、アクティブクルーズコントロール装置がこの車線変更運転を検知するのは、その別の車両が当該車両の車線に既に実質的に出現してからになるからである。
【発明の開示】
【発明が解決しようとする課題】
【0006】
従って本発明の目的は、冒頭に述べた種類の方法及び装置を、別の車両が実行する車線変更運転を早期に検知し得るような形で提供することにある。
【課題を解決するための手段】
【0007】
この目的は、本発明による車両用の車線変更運転検知方法及び装置によって達成されるが、この方法及び装置においては、観測対象車両の車線変更挙動を記述する少なくとも1つの観測変数が定められる。これはさらに、その少なくとも1つの観測変数に応じて、車線変更変数を定めることを含んでいる。この車線変更変数は、観測対象車両が、その対象車両が走行している車線から車線変更しようとする意図を特徴づけるものである。この結果、車線変更変数を評価することによって、その対象車両の差し迫った車線変更を、予測された車線変更意図に基づいて早期に検知することができる。
【0008】
本発明による方法の有利な実施形態が従属請求項に提示される。
【0009】
有利な点は、車線変更変数が、当該車両が走行している車線への観測対象車両の割り込みに関連している点である。従って、その対象車両の割り込み運転を早期に検知することができる。
【0010】
観測対象車両の車線変更意図を数学的に明確に確認し得るようにするため、車線変更変数は、特に、観測対象車両の差し迫った車線変更の確率を記述する。これはさらに、車線変更変数を評価することによってその確率がある特性しきい値よりも大きいことが判明したときに、その対象車両の車線変更が差し迫っていることを推定することを含んでいる。
【0011】
車線変更意図を検知するための最も重要な特性の1つは、車線の軌道に対する観測対象車両の横方向の動的挙動である。従って、もし、第1の観測変数が車線オフセット変数であれば、及び/又は、第2の観測変数が車線オフセットの変化変数であれば、及び/又は、第3の観測変数が横方向オフセットの加速度変数であれば好都合である。ここで、車線オフセット変数は、道路上の観測対象車両の車線の中心線に対するその対象車両の横方向の移動量を記述する変数であり、車線オフセットの変化変数は、対象車両の車線の軌道に対する接線に対して直角方向のその対象車両の横方向速度を記述する変数であり、横方向オフセットの加速度変数は、差し迫った車線変更に基づいて出現する対象車両の最大横方向加速度を記述する変数である。
【0012】
別の重要な特性は、一方では、観測対象車両が走行している車線の軌道の幾何学的特徴から生じ、他方では、観測対象車両と、道路表面に設けられかつその対象車両の車線の軌道を規定する道路標識との間に生じる特性的な時間間隔から結果的に生じる。従って、車線変更変数の正確な決定に関して、第4の観測変数を車線の曲率変数とし、及び/又は、第5の観測変数を車線横断時間変数とすることができる。この場合、車線の曲率変数は、対象車両の車線の軌道の曲率を記述する変数であり、車線横断時間変数は、対象車両の車線の境界を定める道路標識を横断するまでに経過することが予期される時間を記述する変数である。
【0013】
特に、当該車両と先行車両との間の間隙へ潜在的に危険な割り込みをすることになる観測対象車両の車線変更運転を可能な限り正確に記述し得るようにするために、車両間の間隙に対する観測対象車両の空間的及び時間的挙動を記述する観測変数を決定すれば有利である。これに関して、第6の観測変数を間隙距離変数とすることができ、及び/又は、第7の観測変数を間隙相対速度変数とすることができ、及び/又は、第8の観測変数を間隙相対加速度変数とすることができる。ここで、間隙距離変数は、車両間の間隙に対する対象車両の距離を記述する変数であり、間隙相対速度変数は、車両間の間隙に対する対象車両の速度を記述する変数であり、間隙相対加速度変数は、車両間の間隙に対する対象車両の加速度を記述する変数である。
【0014】
少なくとも1つの観測変数は、通常、対象車両を観測するために設けられる観測手段によって供給される観測データに基づいて決定される。この観測データは一般的に統計的変動を伴っているが、この変動は、例えば物理現象及び外乱影響によって惹起されるものであり、多少に拘わらず明白なノイズによって示される。このノイズは、最終的には供給される観測データの質の低下をもたらし、その結果、観測データに基づいて決定される少なくとも1つの観測変数の相応の分散を生じさせる。従って、観測対象車両の車線変更意図の予測の信頼性に関して言明をなし得るためには、車線変更変数の決定において、関連する分散を相応に考慮することによって、少なくとも1つの観測変数の品質評価又は品質の重み付けを行うと有利である。
【0015】
少なくとも1つの観測変数及び/又はその分散は、特にカルマンフィルタを用いることによって確実に決定することができる。カルマンフィルタは、このために、観測手段が供給する観測データを評価する。少なくとも1つの観測変数の分散は、その後、当該カルマンフィルタ操作が依拠している共分散行列から結果的に得られる。
【0016】
いくつかの観測変数及び/又はそれらの分散が決定されると、車線変更変数を確率ネットワークによって効率的に計算して定めるために、それらを相互に結合することができる。確率ネットワークの推定に基づいて、分散の大きい観測変数よりも低分散の観測変数が重視されるので、決定される観測変数の暗黙的な品質評価又は品質の重み付けが行われ、最終的には、観測変数に従って決定される車線変更変数の正確さが最適なものになる。
【0017】
車線変更変数の評価によって、観測対象車両がすぐにも車線変更する状況が推定されると、当該車両の縦及び/又は横方向の動的性能を変えるように設けられた車両設備において、運転者とは無関係な介入が実行される可能性が生じる。この介入は、対象車両の車線変更によってその車両へ近接し過ぎる危険な可能性を、当該車両の縦速度及び/又は走行方向を適切に適応させることによって回避するように行われる。
【0018】
車両設備における運転者とは無関係な介入の代わりとして、あるいはそれに追加するものとして、運転者の注意を、対象車両の車線変更が差し迫っていることに引き付ける運転者への注意指示、つまり光学的及び/又は音響的及び/又は触覚的指示を発することが考えられる。
【0019】
車線変更運転を検知する本発明による方法は、当該車両に配置されるアダプティブクルーズコントロール装置、及び/又は、当該車両に配置される横方向制御装置、例えば車線維持支援と関連させて有利に使用することができる。この場合、アダプティブクルーズコントロール装置は、特にアクティブクルーズコントロール装置であってもよい。
【0020】
次に、本発明による方法及び装置を添付の図面に基づいて詳解する。
【発明を実施するための最良の形態】
【0021】
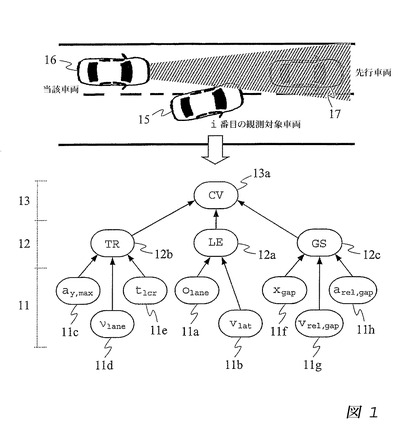
図1は、本発明による車両用の車線変更運転検知方法の概略表現を示す。この方法は、種々のレベルの確率ネットワークを含んでおり、観測対象車両15の車線変更挙動を記述するいくつかの観測変数が第1レベル11に記載されている。
【0022】
ここでは、各観測変数に、確率ネットワークの特定の初期ノードが割り当てられており、各初期ノードにおける観測変数の決定は、対象物追跡及び車線検知のためのカルマンフィルタを用いて行われる。このため、カルマンフィルタは、次の形、すなわち、
【数1】
の形の状態ベクトルを用いる。式中、olane,egoは、車線の中心に対する当該車両16の横方向の移動量を記述し、Ψは、車線の軌道の接線に対する当該車両16のヨー角度を記述し、c0は、車線の曲率を記述し、c1は、車線の曲率の時間的変化を記述し、wlaneは、車線の幅を記述し、xobj,iは、i番目(iは整数)の観測対象車両15からの縦方向の距離を記述し、vx,egoは、当該車両16の縦方向の速度を記述し、ax,egoは、当該車両16の縦方向の加速度を記述し、vx,obj,i及びax,obj,iは、それぞれ、i番目の観測対象車両15の縦方向の速度及び縦方向の加速度を記述し、yobj,iは、i番目の観測対象車両15の横方向の距離を記述し、vy,obj,i及びay,obj,iは、それぞれ、i番目の観測対象車両15の横方向の速度及び横方向の加速度を記述する。
【0023】
続いて、確率ネットワークの第1の初期ノード11aにおいて、車線オフセット変数olaneが定められる。この変数は、i番目の観測対象車両15の車線の中心に対するその対象車両の横方向の移動量を記述するもので、次式によって表される。
【数2】
但し、簡単化のために、変数wlaneによって記述される幅はすべての道路について同じであると仮定する。正負の符号は、i番目の観測対象車両15が走行方向に見て当該車両16の左側及び/又は右側のいずれにあるかによって区別する。
【0024】
ここで、式(1.4)に入っている関数ylane(xobj,i)は、距離変数xobj,iに応じて、i番目の観測対象車両15の車線の中心を定める軌道を記述するものであり、
【数3】
として定義される。
【0025】
当該車両16のヨー角度に基づいて、車線の軌道が、ヨー角度Ψの値に従って回転され、それは次式の近似項、すなわち、
【数4】
によって、式(1.5)において考慮されている。
【0026】
確率ネットワークの第2の初期ノード11bにおいては、又、車線オフセットの変化変数vlatが決定される。この変数は、i番目の観測対象車両15の車線の軌道の接線に直角な方向におけるその対象車両の横方向の速度を記述する。この場合、車線オフセットの変化変数vlatは、
【数5】
となる。式中、角度αの大きさは、x=0及びx=xobj,iの値によって与えられる当該車両16からの距離において、道路の軌道に対する接線の方向の違いから得られ、
【数6】
である。
【0027】
差し迫った車線変更を検知するモデルを、i番目の観測対象車両15が走行するコースの軌道から導き出し得るようにするため、かつ又、差し迫った車線変更に特徴的な観測変数を決定し得るようにするため、当該車両16に対して測定された距離変数(xobj,i、yobj,i)をこの目的に適した座標系に変換する必要がある。
【0028】
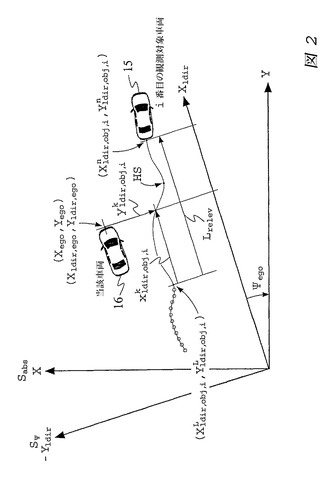
適切な座標変換については、図2を参照して以下にさらに詳しく説明することができる。この場合、当該車両16の走行中に、連続する測定時点において測定される距離変数(xobj,i、yobj,i)は個々の測定点○で表現されている。後者は、以下において、回帰多項式を計算するために用いることができるもので、引き続いて、この回帰多項式から、i番目の観測対象車両15が走行する可能性の高いコースの軌道を、差し迫った車線変更を検知するために導き出すことができる。
【0029】
距離変数(xobj,i、yobj,i)の測定は当該車両16に対して行われるので、当該車両16は、測定される距離変数(xobj,i、yobj,i)に関して相対的な座標系を形成する。しかし、当該車両16の移動によって、相対的座標系の位置と方向とは時間と共に変化し、これは、差し迫った車線変更を検知するための計算の複雑さを著しく増大させる。従って、測定された距離変数(xobj,i、yobj,i)を時間によって変化しない絶対座標系Sabsに変換する。その原点は、当該車両16の走行開始点によって定義される。
【0030】
測定された距離変数(xobj,i、yobj,i)の変換においては、各測定時点に適用し得る当該車両16の位置座標(Xego,Yego)と方向Ψegoとを考慮しなければならない。すなわち、
【数7】
を考慮しなければならない。
【0031】
次に、測定された距離変数(xobj,i、yobj,i)の相対座標系から絶対座標系Sabsへの変換は、各測定時点における(Xego、Yego)だけの移動量と、Ψegoだけの回転とから構成される。この変換の結果は、i番目の観測対象車両15が走行するコースの軌道であり、絶対座標系Sabsにおける次の軌跡によって与えられる。
【数8】
次に、軌跡、
【数9】
は、Ψegoによって与えられる方向における、つまり、Ψegoだけ回転した座標系SΨにおける、i番目の観測対象車両15が走行するコースの軌道を表現する。位置ベクトル
【数10】
及び
【数11】
は絶対位置ベクトル
【数12】
に基づいて決定されるが、この絶対位置ベクトルは、そのベクトル部分としては、i番目の観測対象車両15の絶対位置ベクトル(Xobj,i、Yobj,i)から−Ψegoだけの回転によって得られる。従って、
【数13】
は、i番目の観測対象車両15がΨegoの方向に走行した距離を表現する。同様に、
【数14】
は、i番目の観測対象車両15がΨegoに直角の方向に走行した距離を表現する。
【0032】
位置ベクトル
【数15】
は、差し迫った車線変更に関係する個々の距離変数Lrelevを決定するための基礎になる。この距離変数Lrelevは、図2に従って、
【数16】
及び
【数17】
から得られる。
【0033】
以下、計算の複雑さを最小限にするため、さらに別の軌跡、
【数18】
が定められる。これは、車線が直線軌道に従うという仮定に基づく軌跡T2を表す。ここで、距離変数
【数19】
は、i番目の観測対象車両15の車線の中心に対するその対象車両の横方向の移動量を記述し、
【数20】
で表される。
【0034】
次に、i番目の観測対象車両15の車線変更が生起しそうな起点Sを決定する。このために、軌跡T3に対して回帰多項式yT3を定めるが、これは最小二乗法を適用して行われる。続いて車線変更が生起しそうな起点Sが、回帰多項式yT3が極値を取る位置に得られる。
【0035】
車線の軌道の曲率は起点Sに続く道路部分における車線変更運転の検知に重要であるだけなので、軌跡T2に対する回帰多項式yT2はこの道路部分についてのみ決定すれば十分である。この結果、i番目の観測対象車両15の差し迫った車線変更の予測における計算量は大幅に低減される。
【0036】
次に、確率ネットワークの第3の初期ノード11cにおいては、横方向オフセットの加速度変数ay,maxが決定される。この変数は、差し迫った車線変更に基づいて最大値として出現するi番目の観測対象車両15の横方向加速度を記述するものである。この決定は、軌跡T3に可能な限りよく合致し、かつ横方向オフセットの加速度変数ay,maxをパラメータとして表現されるモデル軌跡Tmを定めることによって行われる。決定された軌跡T3に最もよく合致するこのモデル軌跡Tmが、続いて、第3の初期ノード11cにおいて考慮すべき横方向オフセットの加速度変数ay,maxの値を提供する。このモデル軌跡に対しては次式が適用される。すなわち、
【数21】
である。式中、ベクトルの距離変数
【数22】
は、
【数23】
の一部分であって、車線変更が生起しそうな起点Sと選択された予測区間との間にある部分を表現している。この場合、モデル軌跡Tmの適合において生じる分散は、
【数24】
として計算される。この場合、軌跡T3に最もよく合致するこのモデル軌跡Tmに対して二分探索が行われる。この二分探索においては、横方向オフセットの加速度変数ay,maxに対して規定された値の間隔を連続的に処理し、2つの連続する探索操作r−1及びrにおいて
【数25】
が所定のしきい値ε未満になると、すなわち、
【数26】
になると、その二分探索は直ちに完了する。
【0037】
第4の初期ノード11dにおいては、車線の曲率変数νlaneが決定される。この変数は、i番目の観測対象車両15の車線の軌道の曲率を記述するものであって、
【数27】
によって表される。但し、
【数28】
である。
【0038】
確率ネットワークの第5の初期ノード11eにおいては、車線横断時間変数tlcrが決定される。この変数は、i番目の観測対象車両15の車線の境界を定める道路標識を横断するまでに経過することが予期される時間を記述する(車線横断までの時間[time to line crossing]として知られる)。車線横断時間変数tlcrを計算するために、軌跡T2の回帰多項式yT2と、次式、
【数29】
によって与えられる道路標識の位置との間の交点が、次式、
【数30】
から定められる。
【0039】
次に、式(1.22)の解は、i番目の観測対象車両15が道路標識を横断することが予期されるまでの空間距離を提供する。車線横断時間変数tlcrを決定するために、簡単化して速度変数vx,obj,iは一定であると仮定すると、次式、
【数31】
が得られる。
【0040】
特に、当該車両16と先行車両17との間の間隙への潜在的な危険な割り込みを行うような、i番目の観測対象車両15の車線変更運転の検知を可能にするために、車両間の間隙に対するi番目の観測対象車両15の空間的及び時間的挙動を記述するさらに別の観測変数を決定する。
【0041】
このため、第6の初期ノード11fにおいては、間隙距離変数xgapが決定される。この変数は、車両間の間隙に対するi番目の観測対象車両15の距離を記述するものであり、
【数32】
で表される。
又、第7の初期ノード11gにおいては、間隙相対速度変数vgap,relが決定される。この変数は、車両間の間隙に対するi番目の観測対象車両15の速度を記述し、
【数33】
で表される。さらに、第8の初期ノード11hにおいては、間隙相対加速度変数agap,relが決定される。この変数は、車両間の間隙に対するi番目の観測対象車両15の加速度を記述し、
【数34】
である。
【0042】
この決定は、車両間の間隙と最もよく合致する理論的な車両間の間隙であって、間隙距離変数xgap、間隙相対速度変数vgap,relと、間隙相対加速度変数agap,relとをパラメータとして表現される理論的な車両間の間隙を定めることによって行われる。次に、実際の車両間の間隙と最もよく合致する理論的な車両間の間隙が、初期ノード11f〜11hにおいて考慮すべき間隙距離変数xgapと、間隙相対速度変数vgap,relと、間隙相対加速度変数agap,relとを提供する。
【0043】
もし先行車両17が存在しなければ、xgapは標準値に設定され、vgap,relはvegoに設定され、agap,relはaegoに設定される。
【0044】
さらに、初期ノード11a〜11hにおいて決定される観測変数に対する品質尺度として、関連する分散が考慮される。これは、カルマンフィルタ操作が依拠している共分散行列Pから導くことができる。
【0045】
対象物追跡及び状況検知のためのカルマンフィルタは状態ベクトル
【数35】
及び
【数36】
を提供する。さらに、関連する共分散行列Plane及びPobj,iを使用することができる。以下においては、異なるカルマンフィルタによって提供される変数はそれぞれ互いに独立であり、従って、
【数37】
であると仮定する。但し、
【数38】
である。
【0046】
確率ネットワークの初期ノードZl(l=a...h)の観測変数の(平均)値を計算するには、2つのカルマンフィルタの状態ベクトル
【数39】
及び
【数40】
を適切に結合する関数が必要である。すなわち、
【数41】
【0047】
確率ネットワークの構造から、初期ノードZlは相互に独立であることが暗黙裡に仮定されている。その結果、第1近似においては、初期ノードZlの観測変数の分散σZlは、次の特性、すなわち、
【数42】
を有することが仮定される。
【0048】
第l番目の初期ノードZlの観測変数の分散σZlは、テイラーの級数展開を用いて表現することができる。すなわち、
【数43】
である。但し、Cは、μZlの値が定められる変数xsの共分散行列を表す。
【0049】
行列Aは、点xs=μsにおける微分係数から構成され、
【数44】
である。
【0050】
初期ノードZlの観測変数の分散σZlの決定後、正規分布化された確率密度関数Nl(μZl,σZl)が個々の初期ノードZlの占有度に対して設定される。確率ネットワークは離散値の初期ノードZlを含むので、所定の間隔値[a、b]に対する確率は、
【数45】
によって定められる。この積分は、閉じた形で解くことができず、又、数値積分の実行は計算的に非効率となる可能性が高いので、式(2.7)は、
【数46】
の形の正規分布関数を用いて定められる。その結果、最終的に、
【数47】
が得られる。
【0051】
初期ノードZlの分散σZlを含めることによって、初期ノードZlにおいて決定される観測変数の暗黙裡の品質評価又は品質の重み付けを行うことが可能になる。それは、確率ネットワークの推定によって、大きい分散σZlの観測変数よりも小さい分散σZlの観測変数の方が重視されるからである。
【0052】
i番目の観測対象車両15が割り込むか否かを確定するため、確率ネットワークの第1レベル11で決定された観測変数を、第2レベル12でグループ化して中間変数を形成する。
【0053】
第1の中間ノード12aにおいては、第1の初期ノード11aにおいて決定された車線オフセット変数olaneと、第2の初期ノード11bにおいて決定された車線オフセットの変化変数vlatとをグループ化して、車線オフセット指示変数LEを形成する。
【0054】
さらに、第2の中間ノード12bにおいては、第3の初期ノード11cにおいて決定された横方向オフセットの加速度変数ay,maxと、第4の初期ノード11dにおいて決定された車線の曲率変数νlaneと、第5の初期ノード11eにおいて決定された車線横断時間変数tlcrとをグループ化して軌跡指示変数TRを形成し、最後に、第6の初期ノード11fにおいて決定された間隙距離変数xgapと、第7の初期ノード11gにおいて決定された間隙相対速度変数vgap,relと、第8の初期ノード11hにおいて決定された間隙相対加速度変数agap,relとを、第3の中間ノード12cにおいてグループ化して車両間間隙指示変数GSを形成する。このグループ化は、それぞれの場合に、車線オフセット指示変数LEと、軌跡指示変数TRと、車両間間隙指示変数GSとが、別の車両が割り込みそうな場合には“真”の状態となり、別の車両が割り込みそうでない場合には“真でない”状態となるように行われる。
【0055】
中間ノード12a〜12cにおいて決定される中間変数は、引き続いて、確率ネットワークの第3レベル13を形成する出力ノード13aにおいて結合され、車線変更変数CVの形の1つの共通出力変数を形成する。この車線変更変数CVは、i番目の観測対象車両15の差し迫った割り込み運転に対する割り込み確率を記述するように形成される。
【0056】
従って、確率ネットワークの個々のレベル11〜13は決定の階層構造を構成し、その階層構造においては、第1レベル11の初期ノード11a〜11hが、i番目の観測対象車両15の車線変更挙動又は割り込み挙動を記述し、第2レベル12の中間ノード12a〜12cは部分的な中間段階の決定を表現し、最後に、第3レベル13の出力ノード13aが、中間段階の決定を基礎にして最終決定を形成する。この最終決定は、i番目の観測対象車両15の車線変更意図又は割り込み意図を、車線変更変数CVによって特徴づけたものである。
【0057】
車線変更変数CVによって記述される割り込み確率がある特性しきい値よりも高い場合、すなわち、i番目の観測対象車両15の割り込みが差し迫っていることを高い確度をもって推定し得る場合には、当該車両16の縦方向の動的性能を変えるように設けられた車両設備において運転者とは無関係な介入が実行される。この介入は、当該車両16と割り込み車両15との間の所定の安全時間間隔が維持されるまで、車両16の縦速度を減速するように行われる。もし、必要であれば、i番目の観測対象車両15との衝突を避けるために、自動的な非常制動操作を発動することもできる。
【0058】
従って、本発明による方法は、従来型のアクティブクルーズコントロール装置の機能を、別の車両15の割り込みがある場合について拡張している。車両設備は、例えば、当該車両16の制動手段及び/又は走行手段である。この点に関して、回避操作を実行するために、当該車両16の横方向の動的性能を変えるように設けられる車両設備において運転者とは無関係な介入を遂行することも考えられる。この場合の車両設備は、例えば当該車両16のかじ取り手段である。
【0059】
車両設備への運転者とは無関係な介入に加えて、運転者に対する光学的及び/又は音響的及び/又は触覚的指示の出力が発せられて、運転者の注意が、i番目の観測対象車両15の割り込みが差し迫っていることに引き付けられる。
【0060】
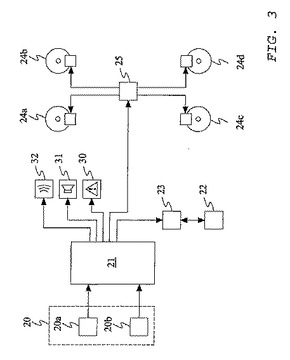
図3は、本発明による方法を実行するための装置の例示的な実施形態を示す。
【0061】
この装置は、別の車両を観測する観測手段20を含んでおり、この観測手段20は、対象物を追跡する第1センサ装置20aと、車線を追跡する第2センサ装置20bとを有している。第1センサ装置20aは、i番目の観測対象車両15の当該車両16に対する空間的及び時間的挙動を測定し、第2センサ装置20bは、当該車両16の車線の道路標識の軌道に対するi番目の観測対象車両15の空間的及び時間的挙動を測定する。
【0062】
対象物追跡用の第1センサ装置20aは、レーダセンサ及び/又は赤外線波長域で作動するレーザ走査装置である。レーザ走査装置の走査角度範囲は通常30°よりも大きくする。その結果、隣の車線を走行する別の車両を、当該車両16から15メートル以下の距離においても測定することができる。レーダセンサを使用する場合には、当該車両16の前方及び側方の近接範囲及び遠方範囲の両範囲を確実に追跡範囲に含め得るようにするため、異なるレーダ周波数が必要である。例えば、近接範囲の追跡には通常24GHzのレーダ周波数が使用され、遠方範囲の追跡には通常77GHzのレーダ周波数が使用される。
【0063】
車線追跡用の第2センサ装置20bも、CCDカメラ又は赤外線波長域で作動する画像レーザ走査装置である。代替方式又は追加として、車線の追跡を、当該車両16に装備される衛星支援のナビゲーションシステムによって利用し得るようになる電子マップデータに基づいて行うことができる。
【0064】
観測手段20が供給する観測データは、続いて評価ユニット21に送られ、その評価ユニット21が観測変数及びその分散を決定して、最終的に車線変更変数CVを定める。
【0065】
車両16の走行手段22において運転者とは無関係な介入を実行するために、走行手段制御器23が設けられ、それによって、車両駆動装置としてのエンジンの駆動トルクを変えることができる。さらに、車両16の制動手段24a〜24dにおいて運転者とは無関係な介入を実行するために、制動手段制御器25が設けられ、それによって、制動手段24a〜24dにおいて発生させる制動トルクを変えることができる。
【0066】
運転者への指示を出力するために、光学信号変換器30及び/又は音響信号変換器31及び/又は触覚信号変換器32が設けられる。この場合、触覚信号変換器32は、例えばハンドルのトルク変換器であり、これによって、ハンドルのトルクを、当該車両16に装着されるハンドルにおける振動の形で誘起することができる。又、代替方式として、触覚信号変換器32を、ランブルストリップのゴトゴト音発生用として設けられる構造伝達音響発生器とすることもできる。この場合は、当該車両16の両側にそれぞれ別個の構造伝達音響発生器を配備することができる。そうすれば、i番目の観測対象車両15の車線変更又は割り込み運転が差し迫っている車両の側にランブルストリップ音を発生させることができる。
【図面の簡単な説明】
【0067】
【図1】本発明による方法を確率ネットワークの形で表した例示的な実施形態を示す。
【図2】座標軸に基づいた車線変更運転の表現を平面図において示す。
【図3】本発明による装置の例示的な実施形態の概略的表現を示す。
【技術分野】
【0001】
本発明は車両用の車線変更運転検知方法及び装置に関する。
【0002】
本発明による方法及び装置は、例えば、車両に配置されるアダプティブクルーズコントロール装置として知られる縦方向制御装置を改善するために用いることができる。
【背景技術】
【0003】
先行技術から知られるアダプティブクルーズコントロール装置は、主として2つのグループに分類することができる。第1グループは単なるクルーズコントロール装置を含むが、この装置は、道路の勾配、風の抵抗、その他同類の状況があっても、設定された車両の縦速度を維持するものである。第2グループはアクティブクルーズコントロール装置を含んでおり、この装置は、レーダセンサを使用して、当該車両と前方走行車両との間の距離及び相対速度を制御する。アクティブクルーズコントロール装置が、前方を走行する低速車両を検知すると、当該車両と前方走行車両との間の所定の時間間隔が維持されるまで、当該車両の縦速度が、適切な制動減速を発生させることによって減速される。このような距離及び相対速度の制御は、運転の快適さを著しく高め、特に高速道路における長距離走行の場合に運転者の早い疲労を確実に防ぐ。
【0004】
しかし、装置に関わるいくつかの限界のために、従来のアクティブクルーズコントロール装置の運転者に対する支援は限られている。装置に関わる限界は、特に、アクティブクルーズコントロール装置に設定することができる最高及び最低縦速度、あるいは、アクティブクルーズコントロール装置に関連して利用し得る車両の最大制動減速度によってもたらされる。装置に関わるこれらの限界を超えた場合は、運転者自身が、アダプティブクルーズコントロールの機能を完全に遂行しなければならない。これに該当するのは、特に、前方走行車両が非常に急速に接近してきた場合、前方走行車両が急に減速した場合、別の車両が突然車線変更運転して当該車両の車線に割り込んできた場合、あるいは、運転者が、アクティブクルーズコントロール装置に設定し得る当該車両の最高又は最低縦速度よりも高いか又は低い縦速度を欲した場合等である。
【0005】
この点については、別の車両が突然割り込んでくる結果をもたらす車線変更運転が特に危険であることが判明している。なぜなら、アクティブクルーズコントロール装置がこの車線変更運転を検知するのは、その別の車両が当該車両の車線に既に実質的に出現してからになるからである。
【発明の開示】
【発明が解決しようとする課題】
【0006】
従って本発明の目的は、冒頭に述べた種類の方法及び装置を、別の車両が実行する車線変更運転を早期に検知し得るような形で提供することにある。
【課題を解決するための手段】
【0007】
この目的は、本発明による車両用の車線変更運転検知方法及び装置によって達成されるが、この方法及び装置においては、観測対象車両の車線変更挙動を記述する少なくとも1つの観測変数が定められる。これはさらに、その少なくとも1つの観測変数に応じて、車線変更変数を定めることを含んでいる。この車線変更変数は、観測対象車両が、その対象車両が走行している車線から車線変更しようとする意図を特徴づけるものである。この結果、車線変更変数を評価することによって、その対象車両の差し迫った車線変更を、予測された車線変更意図に基づいて早期に検知することができる。
【0008】
本発明による方法の有利な実施形態が従属請求項に提示される。
【0009】
有利な点は、車線変更変数が、当該車両が走行している車線への観測対象車両の割り込みに関連している点である。従って、その対象車両の割り込み運転を早期に検知することができる。
【0010】
観測対象車両の車線変更意図を数学的に明確に確認し得るようにするため、車線変更変数は、特に、観測対象車両の差し迫った車線変更の確率を記述する。これはさらに、車線変更変数を評価することによってその確率がある特性しきい値よりも大きいことが判明したときに、その対象車両の車線変更が差し迫っていることを推定することを含んでいる。
【0011】
車線変更意図を検知するための最も重要な特性の1つは、車線の軌道に対する観測対象車両の横方向の動的挙動である。従って、もし、第1の観測変数が車線オフセット変数であれば、及び/又は、第2の観測変数が車線オフセットの変化変数であれば、及び/又は、第3の観測変数が横方向オフセットの加速度変数であれば好都合である。ここで、車線オフセット変数は、道路上の観測対象車両の車線の中心線に対するその対象車両の横方向の移動量を記述する変数であり、車線オフセットの変化変数は、対象車両の車線の軌道に対する接線に対して直角方向のその対象車両の横方向速度を記述する変数であり、横方向オフセットの加速度変数は、差し迫った車線変更に基づいて出現する対象車両の最大横方向加速度を記述する変数である。
【0012】
別の重要な特性は、一方では、観測対象車両が走行している車線の軌道の幾何学的特徴から生じ、他方では、観測対象車両と、道路表面に設けられかつその対象車両の車線の軌道を規定する道路標識との間に生じる特性的な時間間隔から結果的に生じる。従って、車線変更変数の正確な決定に関して、第4の観測変数を車線の曲率変数とし、及び/又は、第5の観測変数を車線横断時間変数とすることができる。この場合、車線の曲率変数は、対象車両の車線の軌道の曲率を記述する変数であり、車線横断時間変数は、対象車両の車線の境界を定める道路標識を横断するまでに経過することが予期される時間を記述する変数である。
【0013】
特に、当該車両と先行車両との間の間隙へ潜在的に危険な割り込みをすることになる観測対象車両の車線変更運転を可能な限り正確に記述し得るようにするために、車両間の間隙に対する観測対象車両の空間的及び時間的挙動を記述する観測変数を決定すれば有利である。これに関して、第6の観測変数を間隙距離変数とすることができ、及び/又は、第7の観測変数を間隙相対速度変数とすることができ、及び/又は、第8の観測変数を間隙相対加速度変数とすることができる。ここで、間隙距離変数は、車両間の間隙に対する対象車両の距離を記述する変数であり、間隙相対速度変数は、車両間の間隙に対する対象車両の速度を記述する変数であり、間隙相対加速度変数は、車両間の間隙に対する対象車両の加速度を記述する変数である。
【0014】
少なくとも1つの観測変数は、通常、対象車両を観測するために設けられる観測手段によって供給される観測データに基づいて決定される。この観測データは一般的に統計的変動を伴っているが、この変動は、例えば物理現象及び外乱影響によって惹起されるものであり、多少に拘わらず明白なノイズによって示される。このノイズは、最終的には供給される観測データの質の低下をもたらし、その結果、観測データに基づいて決定される少なくとも1つの観測変数の相応の分散を生じさせる。従って、観測対象車両の車線変更意図の予測の信頼性に関して言明をなし得るためには、車線変更変数の決定において、関連する分散を相応に考慮することによって、少なくとも1つの観測変数の品質評価又は品質の重み付けを行うと有利である。
【0015】
少なくとも1つの観測変数及び/又はその分散は、特にカルマンフィルタを用いることによって確実に決定することができる。カルマンフィルタは、このために、観測手段が供給する観測データを評価する。少なくとも1つの観測変数の分散は、その後、当該カルマンフィルタ操作が依拠している共分散行列から結果的に得られる。
【0016】
いくつかの観測変数及び/又はそれらの分散が決定されると、車線変更変数を確率ネットワークによって効率的に計算して定めるために、それらを相互に結合することができる。確率ネットワークの推定に基づいて、分散の大きい観測変数よりも低分散の観測変数が重視されるので、決定される観測変数の暗黙的な品質評価又は品質の重み付けが行われ、最終的には、観測変数に従って決定される車線変更変数の正確さが最適なものになる。
【0017】
車線変更変数の評価によって、観測対象車両がすぐにも車線変更する状況が推定されると、当該車両の縦及び/又は横方向の動的性能を変えるように設けられた車両設備において、運転者とは無関係な介入が実行される可能性が生じる。この介入は、対象車両の車線変更によってその車両へ近接し過ぎる危険な可能性を、当該車両の縦速度及び/又は走行方向を適切に適応させることによって回避するように行われる。
【0018】
車両設備における運転者とは無関係な介入の代わりとして、あるいはそれに追加するものとして、運転者の注意を、対象車両の車線変更が差し迫っていることに引き付ける運転者への注意指示、つまり光学的及び/又は音響的及び/又は触覚的指示を発することが考えられる。
【0019】
車線変更運転を検知する本発明による方法は、当該車両に配置されるアダプティブクルーズコントロール装置、及び/又は、当該車両に配置される横方向制御装置、例えば車線維持支援と関連させて有利に使用することができる。この場合、アダプティブクルーズコントロール装置は、特にアクティブクルーズコントロール装置であってもよい。
【0020】
次に、本発明による方法及び装置を添付の図面に基づいて詳解する。
【発明を実施するための最良の形態】
【0021】
図1は、本発明による車両用の車線変更運転検知方法の概略表現を示す。この方法は、種々のレベルの確率ネットワークを含んでおり、観測対象車両15の車線変更挙動を記述するいくつかの観測変数が第1レベル11に記載されている。
【0022】
ここでは、各観測変数に、確率ネットワークの特定の初期ノードが割り当てられており、各初期ノードにおける観測変数の決定は、対象物追跡及び車線検知のためのカルマンフィルタを用いて行われる。このため、カルマンフィルタは、次の形、すなわち、
【数1】
の形の状態ベクトルを用いる。式中、olane,egoは、車線の中心に対する当該車両16の横方向の移動量を記述し、Ψは、車線の軌道の接線に対する当該車両16のヨー角度を記述し、c0は、車線の曲率を記述し、c1は、車線の曲率の時間的変化を記述し、wlaneは、車線の幅を記述し、xobj,iは、i番目(iは整数)の観測対象車両15からの縦方向の距離を記述し、vx,egoは、当該車両16の縦方向の速度を記述し、ax,egoは、当該車両16の縦方向の加速度を記述し、vx,obj,i及びax,obj,iは、それぞれ、i番目の観測対象車両15の縦方向の速度及び縦方向の加速度を記述し、yobj,iは、i番目の観測対象車両15の横方向の距離を記述し、vy,obj,i及びay,obj,iは、それぞれ、i番目の観測対象車両15の横方向の速度及び横方向の加速度を記述する。
【0023】
続いて、確率ネットワークの第1の初期ノード11aにおいて、車線オフセット変数olaneが定められる。この変数は、i番目の観測対象車両15の車線の中心に対するその対象車両の横方向の移動量を記述するもので、次式によって表される。
【数2】
但し、簡単化のために、変数wlaneによって記述される幅はすべての道路について同じであると仮定する。正負の符号は、i番目の観測対象車両15が走行方向に見て当該車両16の左側及び/又は右側のいずれにあるかによって区別する。
【0024】
ここで、式(1.4)に入っている関数ylane(xobj,i)は、距離変数xobj,iに応じて、i番目の観測対象車両15の車線の中心を定める軌道を記述するものであり、
【数3】
として定義される。
【0025】
当該車両16のヨー角度に基づいて、車線の軌道が、ヨー角度Ψの値に従って回転され、それは次式の近似項、すなわち、
【数4】
によって、式(1.5)において考慮されている。
【0026】
確率ネットワークの第2の初期ノード11bにおいては、又、車線オフセットの変化変数vlatが決定される。この変数は、i番目の観測対象車両15の車線の軌道の接線に直角な方向におけるその対象車両の横方向の速度を記述する。この場合、車線オフセットの変化変数vlatは、
【数5】
となる。式中、角度αの大きさは、x=0及びx=xobj,iの値によって与えられる当該車両16からの距離において、道路の軌道に対する接線の方向の違いから得られ、
【数6】
である。
【0027】
差し迫った車線変更を検知するモデルを、i番目の観測対象車両15が走行するコースの軌道から導き出し得るようにするため、かつ又、差し迫った車線変更に特徴的な観測変数を決定し得るようにするため、当該車両16に対して測定された距離変数(xobj,i、yobj,i)をこの目的に適した座標系に変換する必要がある。
【0028】
適切な座標変換については、図2を参照して以下にさらに詳しく説明することができる。この場合、当該車両16の走行中に、連続する測定時点において測定される距離変数(xobj,i、yobj,i)は個々の測定点○で表現されている。後者は、以下において、回帰多項式を計算するために用いることができるもので、引き続いて、この回帰多項式から、i番目の観測対象車両15が走行する可能性の高いコースの軌道を、差し迫った車線変更を検知するために導き出すことができる。
【0029】
距離変数(xobj,i、yobj,i)の測定は当該車両16に対して行われるので、当該車両16は、測定される距離変数(xobj,i、yobj,i)に関して相対的な座標系を形成する。しかし、当該車両16の移動によって、相対的座標系の位置と方向とは時間と共に変化し、これは、差し迫った車線変更を検知するための計算の複雑さを著しく増大させる。従って、測定された距離変数(xobj,i、yobj,i)を時間によって変化しない絶対座標系Sabsに変換する。その原点は、当該車両16の走行開始点によって定義される。
【0030】
測定された距離変数(xobj,i、yobj,i)の変換においては、各測定時点に適用し得る当該車両16の位置座標(Xego,Yego)と方向Ψegoとを考慮しなければならない。すなわち、
【数7】
を考慮しなければならない。
【0031】
次に、測定された距離変数(xobj,i、yobj,i)の相対座標系から絶対座標系Sabsへの変換は、各測定時点における(Xego、Yego)だけの移動量と、Ψegoだけの回転とから構成される。この変換の結果は、i番目の観測対象車両15が走行するコースの軌道であり、絶対座標系Sabsにおける次の軌跡によって与えられる。
【数8】
次に、軌跡、
【数9】
は、Ψegoによって与えられる方向における、つまり、Ψegoだけ回転した座標系SΨにおける、i番目の観測対象車両15が走行するコースの軌道を表現する。位置ベクトル
【数10】
及び
【数11】
は絶対位置ベクトル
【数12】
に基づいて決定されるが、この絶対位置ベクトルは、そのベクトル部分としては、i番目の観測対象車両15の絶対位置ベクトル(Xobj,i、Yobj,i)から−Ψegoだけの回転によって得られる。従って、
【数13】
は、i番目の観測対象車両15がΨegoの方向に走行した距離を表現する。同様に、
【数14】
は、i番目の観測対象車両15がΨegoに直角の方向に走行した距離を表現する。
【0032】
位置ベクトル
【数15】
は、差し迫った車線変更に関係する個々の距離変数Lrelevを決定するための基礎になる。この距離変数Lrelevは、図2に従って、
【数16】
及び
【数17】
から得られる。
【0033】
以下、計算の複雑さを最小限にするため、さらに別の軌跡、
【数18】
が定められる。これは、車線が直線軌道に従うという仮定に基づく軌跡T2を表す。ここで、距離変数
【数19】
は、i番目の観測対象車両15の車線の中心に対するその対象車両の横方向の移動量を記述し、
【数20】
で表される。
【0034】
次に、i番目の観測対象車両15の車線変更が生起しそうな起点Sを決定する。このために、軌跡T3に対して回帰多項式yT3を定めるが、これは最小二乗法を適用して行われる。続いて車線変更が生起しそうな起点Sが、回帰多項式yT3が極値を取る位置に得られる。
【0035】
車線の軌道の曲率は起点Sに続く道路部分における車線変更運転の検知に重要であるだけなので、軌跡T2に対する回帰多項式yT2はこの道路部分についてのみ決定すれば十分である。この結果、i番目の観測対象車両15の差し迫った車線変更の予測における計算量は大幅に低減される。
【0036】
次に、確率ネットワークの第3の初期ノード11cにおいては、横方向オフセットの加速度変数ay,maxが決定される。この変数は、差し迫った車線変更に基づいて最大値として出現するi番目の観測対象車両15の横方向加速度を記述するものである。この決定は、軌跡T3に可能な限りよく合致し、かつ横方向オフセットの加速度変数ay,maxをパラメータとして表現されるモデル軌跡Tmを定めることによって行われる。決定された軌跡T3に最もよく合致するこのモデル軌跡Tmが、続いて、第3の初期ノード11cにおいて考慮すべき横方向オフセットの加速度変数ay,maxの値を提供する。このモデル軌跡に対しては次式が適用される。すなわち、
【数21】
である。式中、ベクトルの距離変数
【数22】
は、
【数23】
の一部分であって、車線変更が生起しそうな起点Sと選択された予測区間との間にある部分を表現している。この場合、モデル軌跡Tmの適合において生じる分散は、
【数24】
として計算される。この場合、軌跡T3に最もよく合致するこのモデル軌跡Tmに対して二分探索が行われる。この二分探索においては、横方向オフセットの加速度変数ay,maxに対して規定された値の間隔を連続的に処理し、2つの連続する探索操作r−1及びrにおいて
【数25】
が所定のしきい値ε未満になると、すなわち、
【数26】
になると、その二分探索は直ちに完了する。
【0037】
第4の初期ノード11dにおいては、車線の曲率変数νlaneが決定される。この変数は、i番目の観測対象車両15の車線の軌道の曲率を記述するものであって、
【数27】
によって表される。但し、
【数28】
である。
【0038】
確率ネットワークの第5の初期ノード11eにおいては、車線横断時間変数tlcrが決定される。この変数は、i番目の観測対象車両15の車線の境界を定める道路標識を横断するまでに経過することが予期される時間を記述する(車線横断までの時間[time to line crossing]として知られる)。車線横断時間変数tlcrを計算するために、軌跡T2の回帰多項式yT2と、次式、
【数29】
によって与えられる道路標識の位置との間の交点が、次式、
【数30】
から定められる。
【0039】
次に、式(1.22)の解は、i番目の観測対象車両15が道路標識を横断することが予期されるまでの空間距離を提供する。車線横断時間変数tlcrを決定するために、簡単化して速度変数vx,obj,iは一定であると仮定すると、次式、
【数31】
が得られる。
【0040】
特に、当該車両16と先行車両17との間の間隙への潜在的な危険な割り込みを行うような、i番目の観測対象車両15の車線変更運転の検知を可能にするために、車両間の間隙に対するi番目の観測対象車両15の空間的及び時間的挙動を記述するさらに別の観測変数を決定する。
【0041】
このため、第6の初期ノード11fにおいては、間隙距離変数xgapが決定される。この変数は、車両間の間隙に対するi番目の観測対象車両15の距離を記述するものであり、
【数32】
で表される。
又、第7の初期ノード11gにおいては、間隙相対速度変数vgap,relが決定される。この変数は、車両間の間隙に対するi番目の観測対象車両15の速度を記述し、
【数33】
で表される。さらに、第8の初期ノード11hにおいては、間隙相対加速度変数agap,relが決定される。この変数は、車両間の間隙に対するi番目の観測対象車両15の加速度を記述し、
【数34】
である。
【0042】
この決定は、車両間の間隙と最もよく合致する理論的な車両間の間隙であって、間隙距離変数xgap、間隙相対速度変数vgap,relと、間隙相対加速度変数agap,relとをパラメータとして表現される理論的な車両間の間隙を定めることによって行われる。次に、実際の車両間の間隙と最もよく合致する理論的な車両間の間隙が、初期ノード11f〜11hにおいて考慮すべき間隙距離変数xgapと、間隙相対速度変数vgap,relと、間隙相対加速度変数agap,relとを提供する。
【0043】
もし先行車両17が存在しなければ、xgapは標準値に設定され、vgap,relはvegoに設定され、agap,relはaegoに設定される。
【0044】
さらに、初期ノード11a〜11hにおいて決定される観測変数に対する品質尺度として、関連する分散が考慮される。これは、カルマンフィルタ操作が依拠している共分散行列Pから導くことができる。
【0045】
対象物追跡及び状況検知のためのカルマンフィルタは状態ベクトル
【数35】
及び
【数36】
を提供する。さらに、関連する共分散行列Plane及びPobj,iを使用することができる。以下においては、異なるカルマンフィルタによって提供される変数はそれぞれ互いに独立であり、従って、
【数37】
であると仮定する。但し、
【数38】
である。
【0046】
確率ネットワークの初期ノードZl(l=a...h)の観測変数の(平均)値を計算するには、2つのカルマンフィルタの状態ベクトル
【数39】
及び
【数40】
を適切に結合する関数が必要である。すなわち、
【数41】
【0047】
確率ネットワークの構造から、初期ノードZlは相互に独立であることが暗黙裡に仮定されている。その結果、第1近似においては、初期ノードZlの観測変数の分散σZlは、次の特性、すなわち、
【数42】
を有することが仮定される。
【0048】
第l番目の初期ノードZlの観測変数の分散σZlは、テイラーの級数展開を用いて表現することができる。すなわち、
【数43】
である。但し、Cは、μZlの値が定められる変数xsの共分散行列を表す。
【0049】
行列Aは、点xs=μsにおける微分係数から構成され、
【数44】
である。
【0050】
初期ノードZlの観測変数の分散σZlの決定後、正規分布化された確率密度関数Nl(μZl,σZl)が個々の初期ノードZlの占有度に対して設定される。確率ネットワークは離散値の初期ノードZlを含むので、所定の間隔値[a、b]に対する確率は、
【数45】
によって定められる。この積分は、閉じた形で解くことができず、又、数値積分の実行は計算的に非効率となる可能性が高いので、式(2.7)は、
【数46】
の形の正規分布関数を用いて定められる。その結果、最終的に、
【数47】
が得られる。
【0051】
初期ノードZlの分散σZlを含めることによって、初期ノードZlにおいて決定される観測変数の暗黙裡の品質評価又は品質の重み付けを行うことが可能になる。それは、確率ネットワークの推定によって、大きい分散σZlの観測変数よりも小さい分散σZlの観測変数の方が重視されるからである。
【0052】
i番目の観測対象車両15が割り込むか否かを確定するため、確率ネットワークの第1レベル11で決定された観測変数を、第2レベル12でグループ化して中間変数を形成する。
【0053】
第1の中間ノード12aにおいては、第1の初期ノード11aにおいて決定された車線オフセット変数olaneと、第2の初期ノード11bにおいて決定された車線オフセットの変化変数vlatとをグループ化して、車線オフセット指示変数LEを形成する。
【0054】
さらに、第2の中間ノード12bにおいては、第3の初期ノード11cにおいて決定された横方向オフセットの加速度変数ay,maxと、第4の初期ノード11dにおいて決定された車線の曲率変数νlaneと、第5の初期ノード11eにおいて決定された車線横断時間変数tlcrとをグループ化して軌跡指示変数TRを形成し、最後に、第6の初期ノード11fにおいて決定された間隙距離変数xgapと、第7の初期ノード11gにおいて決定された間隙相対速度変数vgap,relと、第8の初期ノード11hにおいて決定された間隙相対加速度変数agap,relとを、第3の中間ノード12cにおいてグループ化して車両間間隙指示変数GSを形成する。このグループ化は、それぞれの場合に、車線オフセット指示変数LEと、軌跡指示変数TRと、車両間間隙指示変数GSとが、別の車両が割り込みそうな場合には“真”の状態となり、別の車両が割り込みそうでない場合には“真でない”状態となるように行われる。
【0055】
中間ノード12a〜12cにおいて決定される中間変数は、引き続いて、確率ネットワークの第3レベル13を形成する出力ノード13aにおいて結合され、車線変更変数CVの形の1つの共通出力変数を形成する。この車線変更変数CVは、i番目の観測対象車両15の差し迫った割り込み運転に対する割り込み確率を記述するように形成される。
【0056】
従って、確率ネットワークの個々のレベル11〜13は決定の階層構造を構成し、その階層構造においては、第1レベル11の初期ノード11a〜11hが、i番目の観測対象車両15の車線変更挙動又は割り込み挙動を記述し、第2レベル12の中間ノード12a〜12cは部分的な中間段階の決定を表現し、最後に、第3レベル13の出力ノード13aが、中間段階の決定を基礎にして最終決定を形成する。この最終決定は、i番目の観測対象車両15の車線変更意図又は割り込み意図を、車線変更変数CVによって特徴づけたものである。
【0057】
車線変更変数CVによって記述される割り込み確率がある特性しきい値よりも高い場合、すなわち、i番目の観測対象車両15の割り込みが差し迫っていることを高い確度をもって推定し得る場合には、当該車両16の縦方向の動的性能を変えるように設けられた車両設備において運転者とは無関係な介入が実行される。この介入は、当該車両16と割り込み車両15との間の所定の安全時間間隔が維持されるまで、車両16の縦速度を減速するように行われる。もし、必要であれば、i番目の観測対象車両15との衝突を避けるために、自動的な非常制動操作を発動することもできる。
【0058】
従って、本発明による方法は、従来型のアクティブクルーズコントロール装置の機能を、別の車両15の割り込みがある場合について拡張している。車両設備は、例えば、当該車両16の制動手段及び/又は走行手段である。この点に関して、回避操作を実行するために、当該車両16の横方向の動的性能を変えるように設けられる車両設備において運転者とは無関係な介入を遂行することも考えられる。この場合の車両設備は、例えば当該車両16のかじ取り手段である。
【0059】
車両設備への運転者とは無関係な介入に加えて、運転者に対する光学的及び/又は音響的及び/又は触覚的指示の出力が発せられて、運転者の注意が、i番目の観測対象車両15の割り込みが差し迫っていることに引き付けられる。
【0060】
図3は、本発明による方法を実行するための装置の例示的な実施形態を示す。
【0061】
この装置は、別の車両を観測する観測手段20を含んでおり、この観測手段20は、対象物を追跡する第1センサ装置20aと、車線を追跡する第2センサ装置20bとを有している。第1センサ装置20aは、i番目の観測対象車両15の当該車両16に対する空間的及び時間的挙動を測定し、第2センサ装置20bは、当該車両16の車線の道路標識の軌道に対するi番目の観測対象車両15の空間的及び時間的挙動を測定する。
【0062】
対象物追跡用の第1センサ装置20aは、レーダセンサ及び/又は赤外線波長域で作動するレーザ走査装置である。レーザ走査装置の走査角度範囲は通常30°よりも大きくする。その結果、隣の車線を走行する別の車両を、当該車両16から15メートル以下の距離においても測定することができる。レーダセンサを使用する場合には、当該車両16の前方及び側方の近接範囲及び遠方範囲の両範囲を確実に追跡範囲に含め得るようにするため、異なるレーダ周波数が必要である。例えば、近接範囲の追跡には通常24GHzのレーダ周波数が使用され、遠方範囲の追跡には通常77GHzのレーダ周波数が使用される。
【0063】
車線追跡用の第2センサ装置20bも、CCDカメラ又は赤外線波長域で作動する画像レーザ走査装置である。代替方式又は追加として、車線の追跡を、当該車両16に装備される衛星支援のナビゲーションシステムによって利用し得るようになる電子マップデータに基づいて行うことができる。
【0064】
観測手段20が供給する観測データは、続いて評価ユニット21に送られ、その評価ユニット21が観測変数及びその分散を決定して、最終的に車線変更変数CVを定める。
【0065】
車両16の走行手段22において運転者とは無関係な介入を実行するために、走行手段制御器23が設けられ、それによって、車両駆動装置としてのエンジンの駆動トルクを変えることができる。さらに、車両16の制動手段24a〜24dにおいて運転者とは無関係な介入を実行するために、制動手段制御器25が設けられ、それによって、制動手段24a〜24dにおいて発生させる制動トルクを変えることができる。
【0066】
運転者への指示を出力するために、光学信号変換器30及び/又は音響信号変換器31及び/又は触覚信号変換器32が設けられる。この場合、触覚信号変換器32は、例えばハンドルのトルク変換器であり、これによって、ハンドルのトルクを、当該車両16に装着されるハンドルにおける振動の形で誘起することができる。又、代替方式として、触覚信号変換器32を、ランブルストリップのゴトゴト音発生用として設けられる構造伝達音響発生器とすることもできる。この場合は、当該車両16の両側にそれぞれ別個の構造伝達音響発生器を配備することができる。そうすれば、i番目の観測対象車両15の車線変更又は割り込み運転が差し迫っている車両の側にランブルストリップ音を発生させることができる。
【図面の簡単な説明】
【0067】
【図1】本発明による方法を確率ネットワークの形で表した例示的な実施形態を示す。
【図2】座標軸に基づいた車線変更運転の表現を平面図において示す。
【図3】本発明による装置の例示的な実施形態の概略的表現を示す。
【特許請求の範囲】
【請求項1】
観測対象車両(15)の車線変更挙動を記述する少なくとも1つの観測変数が定められる車両用の車線変更運転検知方法であって、前記観測対象車両(15)がその走行車線から車線変更しようとする意図を特徴づける車線変更変数(CV)が、前記少なくとも1つの観測変数に応じて決定される車線変更運転検知方法。
【請求項2】
前記車線変更変数(CV)が、当該車両(16)の走行車線への前記対象車両(15)の割り込みに関係していることを特徴とする請求項1に記載の方法。
【請求項3】
前記車線変更変数(CV)が、前記対象車両(15)の差し迫った車線変更の確率を記述するものであり、この確率が特性しきい値よりも高い場合に車線変更が差し迫っていると推定することを特徴とする請求項1に記載の方法。
【請求項4】
第1の観測変数が車線オフセット変数(olane)であって、この変数は、前記対象車両(15)の車線の中心に対するその対象車両の横方向の移動量を記述することを特徴とする請求項1に記載の方法。
【請求項5】
第2の観測変数が車線オフセットの変化変数(vlat)であって、この変数は、前記対象車両(15)の車線の軌道に対する接線に直角な方向におけるその対象車両の横方向の速度を記述することを特徴とする請求項1に記載の方法。
【請求項6】
第3の観測変数が横方向オフセットの加速度変数(ay,max)であって、この変数は、差し迫った車線変更に基づいて出現する前記対象車両(15)の最大横方向加速度を記述することを特徴とする請求項1に記載の方法。
【請求項7】
第4の観測変数が車線の曲率変数(νlane)であって、この変数は、前記対象車両(15)の車線の軌道の曲率を記述することを特徴とする請求項1に記載の方法。
【請求項8】
第5の観測変数が車線横断時間変数(tlcr)であって、この変数は、前記対象車両(15)の車線の境界を定める道路標識を横断するまでに経過することが予期される時間を記述することを特徴とする請求項1に記載の方法。
【請求項9】
第6の観測変数が、間隙距離変数(xgap)であって、この変数は、前記当該車両(16)と先行車両(17)との間の間隙である車両間の間隙に対する前記対象車両(15)の距離を記述し、及び/又は、間隙相対速度変数(vgap,rel)であって、この変数は、前記車両間の間隙に対する前記対象車両(15)の速度を記述し、及び/又は、間隙相対加速度変数(agap,rel)であって、この変数は、前記車両間の間隙に対する前記対象車両(15)の加速度を記述することを特徴とする請求項1に記載の方法。
【請求項10】
前記車線変更変数(CV)の決定に際して、前記少なくとも1つの観測変数の分散が考慮されることを特徴とする請求項1に記載の方法。
【請求項11】
前記少なくとも1つの観測変数及び/又はその分散がカルマンフィルタを用いて決定されることを特徴とする請求項1〜10のいずれか1項に記載の方法。
【請求項12】
いくつかの観測変数及び/又はそれらの分散が決定され、これらが、前記車線変更変数(CV)を決定するために確率ネットワークによって相互に結合されることを特徴とする請求項1〜11のいずれか1項に記載の方法。
【請求項13】
前記車両(16)の縦方向及び/又は横方向の動的性能を変えるように設けられる車両設備において、運転者とは無関係な介入が実行されることを特徴とする請求項1に記載の方法。
【請求項14】
車線変更が差し迫った場合に、運転者に対する光学的及び/又は音響的及び/又は触覚的指示が、前記車両(16)の運転者に対して出力されることを特徴とする請求項1に記載の方法。
【請求項15】
前記車両(16)に配備される縦方向及び/又は横方向の制御装置と関連させて使用することを特徴とする請求項1に記載の方法。
【請求項16】
別の車両(15)を観測する観測手段(20)であり、前記観測対象車両(15)の車線変更挙動を記述する少なくとも1つの観測変数を決定するために設けられる観測手段(20)を備えた車両用の車線変更運転検知装置であって、評価ユニット(21)が、前記対象車両(15)がその走行車線から車線変更しようとする意図を特徴づける車線変更変数(CV)を、前記少なくとも1つの観測変数に応じて決定する車線変更運転検知装置。
【請求項17】
前記観測手段(20)が、対象物を追跡する第1センサ装置(20a)と、車線を追跡する第2センサ装置(20b)とを有することを特徴とする請求項16に記載の装置。
【請求項1】
観測対象車両(15)の車線変更挙動を記述する少なくとも1つの観測変数が定められる車両用の車線変更運転検知方法であって、前記観測対象車両(15)がその走行車線から車線変更しようとする意図を特徴づける車線変更変数(CV)が、前記少なくとも1つの観測変数に応じて決定される車線変更運転検知方法。
【請求項2】
前記車線変更変数(CV)が、当該車両(16)の走行車線への前記対象車両(15)の割り込みに関係していることを特徴とする請求項1に記載の方法。
【請求項3】
前記車線変更変数(CV)が、前記対象車両(15)の差し迫った車線変更の確率を記述するものであり、この確率が特性しきい値よりも高い場合に車線変更が差し迫っていると推定することを特徴とする請求項1に記載の方法。
【請求項4】
第1の観測変数が車線オフセット変数(olane)であって、この変数は、前記対象車両(15)の車線の中心に対するその対象車両の横方向の移動量を記述することを特徴とする請求項1に記載の方法。
【請求項5】
第2の観測変数が車線オフセットの変化変数(vlat)であって、この変数は、前記対象車両(15)の車線の軌道に対する接線に直角な方向におけるその対象車両の横方向の速度を記述することを特徴とする請求項1に記載の方法。
【請求項6】
第3の観測変数が横方向オフセットの加速度変数(ay,max)であって、この変数は、差し迫った車線変更に基づいて出現する前記対象車両(15)の最大横方向加速度を記述することを特徴とする請求項1に記載の方法。
【請求項7】
第4の観測変数が車線の曲率変数(νlane)であって、この変数は、前記対象車両(15)の車線の軌道の曲率を記述することを特徴とする請求項1に記載の方法。
【請求項8】
第5の観測変数が車線横断時間変数(tlcr)であって、この変数は、前記対象車両(15)の車線の境界を定める道路標識を横断するまでに経過することが予期される時間を記述することを特徴とする請求項1に記載の方法。
【請求項9】
第6の観測変数が、間隙距離変数(xgap)であって、この変数は、前記当該車両(16)と先行車両(17)との間の間隙である車両間の間隙に対する前記対象車両(15)の距離を記述し、及び/又は、間隙相対速度変数(vgap,rel)であって、この変数は、前記車両間の間隙に対する前記対象車両(15)の速度を記述し、及び/又は、間隙相対加速度変数(agap,rel)であって、この変数は、前記車両間の間隙に対する前記対象車両(15)の加速度を記述することを特徴とする請求項1に記載の方法。
【請求項10】
前記車線変更変数(CV)の決定に際して、前記少なくとも1つの観測変数の分散が考慮されることを特徴とする請求項1に記載の方法。
【請求項11】
前記少なくとも1つの観測変数及び/又はその分散がカルマンフィルタを用いて決定されることを特徴とする請求項1〜10のいずれか1項に記載の方法。
【請求項12】
いくつかの観測変数及び/又はそれらの分散が決定され、これらが、前記車線変更変数(CV)を決定するために確率ネットワークによって相互に結合されることを特徴とする請求項1〜11のいずれか1項に記載の方法。
【請求項13】
前記車両(16)の縦方向及び/又は横方向の動的性能を変えるように設けられる車両設備において、運転者とは無関係な介入が実行されることを特徴とする請求項1に記載の方法。
【請求項14】
車線変更が差し迫った場合に、運転者に対する光学的及び/又は音響的及び/又は触覚的指示が、前記車両(16)の運転者に対して出力されることを特徴とする請求項1に記載の方法。
【請求項15】
前記車両(16)に配備される縦方向及び/又は横方向の制御装置と関連させて使用することを特徴とする請求項1に記載の方法。
【請求項16】
別の車両(15)を観測する観測手段(20)であり、前記観測対象車両(15)の車線変更挙動を記述する少なくとも1つの観測変数を決定するために設けられる観測手段(20)を備えた車両用の車線変更運転検知装置であって、評価ユニット(21)が、前記対象車両(15)がその走行車線から車線変更しようとする意図を特徴づける車線変更変数(CV)を、前記少なくとも1つの観測変数に応じて決定する車線変更運転検知装置。
【請求項17】
前記観測手段(20)が、対象物を追跡する第1センサ装置(20a)と、車線を追跡する第2センサ装置(20b)とを有することを特徴とする請求項16に記載の装置。
【図1】

【図2】
【図3】
【図2】
【図3】
【公表番号】特表2007−534041(P2007−534041A)
【公表日】平成19年11月22日(2007.11.22)
【国際特許分類】
【出願番号】特願2006−527298(P2006−527298)
【出願日】平成16年9月4日(2004.9.4)
【国際出願番号】PCT/EP2004/009889
【国際公開番号】WO2005/037592
【国際公開日】平成17年4月28日(2005.4.28)
【出願人】(598051819)ダイムラークライスラー・アクチェンゲゼルシャフト (1,147)
【Fターム(参考)】
【公表日】平成19年11月22日(2007.11.22)
【国際特許分類】
【出願日】平成16年9月4日(2004.9.4)
【国際出願番号】PCT/EP2004/009889
【国際公開番号】WO2005/037592
【国際公開日】平成17年4月28日(2005.4.28)
【出願人】(598051819)ダイムラークライスラー・アクチェンゲゼルシャフト (1,147)
【Fターム(参考)】
[ Back to top ]