
車両用トラクションコントロール装置
【課題】 スリップが発生していないときに発進加速度を十分に得ることができるトラクションコントロール装置を提供すること。
【解決手段】 車輪速度を検出する車輪速度検出手段と、車両に作用する加速度から前後加速度を検出する加速度検出手段と、全輪駆動時に前記前後加速度から車体速度を算出する車体速度算出手段と、前記車輪速度と前記車体速度とを比較し、前記車体速度に対して前記車輪速度が大きくなるスリップを検出したときに前記車輪速度の抑制を行う車輪速度抑制手段と、を備えた車両用トラクションコントロール装置において、車両の駆動出力から前後加速度を推定する加速度推定手段と、検出した前記車両の前後加速度と、車両の駆動出力から推定した前後加速度と、を比較し大きい方を車両の前後加速度として選択する加速度選択手段と、を設けた。
【解決手段】 車輪速度を検出する車輪速度検出手段と、車両に作用する加速度から前後加速度を検出する加速度検出手段と、全輪駆動時に前記前後加速度から車体速度を算出する車体速度算出手段と、前記車輪速度と前記車体速度とを比較し、前記車体速度に対して前記車輪速度が大きくなるスリップを検出したときに前記車輪速度の抑制を行う車輪速度抑制手段と、を備えた車両用トラクションコントロール装置において、車両の駆動出力から前後加速度を推定する加速度推定手段と、検出した前記車両の前後加速度と、車両の駆動出力から推定した前後加速度と、を比較し大きい方を車両の前後加速度として選択する加速度選択手段と、を設けた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、全輪駆動車両に搭載した車両用トラクションコントロール装置に関する。
【背景技術】
【0002】
この種の技術としては、特許文献1に記載の技術が開示されている。この公報では、加速度センサが検出する加速度に基づいて車体速度を推定している。
【特許文献1】特開平6−107142号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
2輪駆動車両にあっては、車体速度は従動輪の車輪速度と近い値を示すため、従動輪の車輪速度に基づいて車体速度を算出する。一方、全輪駆動車両の場合、全てが駆動輪であるため従動輪が存在しない。そこで、加速度センサを用いて車体速度を算出する。しかしながら、加速度センサは降坂路等においては、実際の車両の路面に対する加速度に対して小さな加速度が検出されてしまうため、車体速度が小さく算出されてしまう。
【0004】
車両発進時に車体速度に対して車輪速度が大きくなるスリップが発生したときに車輪速度を抑制するトラクションコントロール装置において、降坂路等において車体速度が小さく算出されてしまうと、算出した車体速度に対して車輪速度が大きくなってしまい、スリップが発生していないにも関わらず車輪速度を抑制するトラクションコントロールが働いてしまうおそれがあった。
【0005】
本発明は、上記問題に着目してなされたもので、その目的とするところは、スリップが発生していないにも関わらずトラクションコントロールが誤動作することを抑制することができる車両用トラクションコントロール装置を提供することである。
【課題を解決するための手段】
【0006】
上記目的を達成するため、車輪速度を検出する車輪速度検出手段と、車両に作用する加速度から前後加速度を検出する加速度検出手段と、全輪駆動時に前記前後加速度から車体速度を算出する車体速度算出手段と、前記車輪速度と前記車体速度とを比較し、前記車体速度に対して前記車輪速度が大きくなるスリップを検出したときに前記車輪速度の抑制を行う車輪速度抑制手段と、を備えた車両用トラクションコントロール装置において、車両の駆動出力から前後加速度を推定する加速度推定手段と、検出した前記車両の前後加速度と、車両の駆動状態を表す出力から推定した前後加速度とを比較し大きい方を車両の前後加速度として選択する加速度選択手段と、を設けた。
【発明の効果】
【0007】
よって、本発明のトラクションコントロール装置においては、スリップが発生していないにも関わらずトラクションコントロールが誤動作することを抑制することができる。
【発明を実施するための最良の形態】
【0008】
以下、本発明の車両用トラクションコントロール装置を実現する最良の形態を、実施例1において説明する。
【実施例1】
【0009】
[4輪駆動車両の構成の概要]
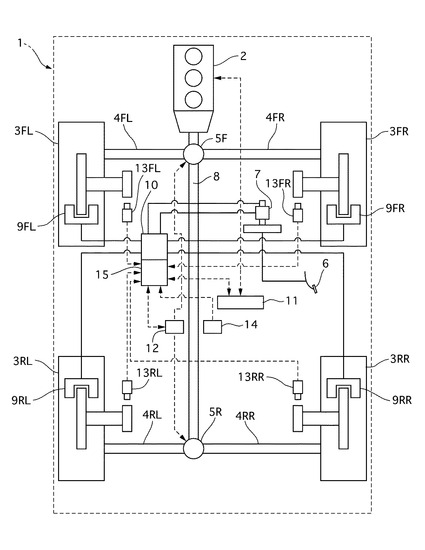
まず、本発明の車両用トラクションコントロール装置が適用された4輪駆動車両1の構成について説明する。図1は4輪駆動車両1の構成を示すシステム図である。
4輪駆動車両1の駆動系は、原動機であるエンジン2と、エンジン2で発生した動力を車輪3FR,3FL,3RR,3RLに伝達するプロペラシャフト8およびドライブシャフト4FR,4FL,4RR,4RLと、ドライブシャフト4FR,4FL,4RR,4RLへの駆動力を配分を行う駆動力配分装置5F,5Rから構成されている。
【0010】
4輪駆動車両1の制動系は、ブレーキペダル6と、このブレーキペダル6に入力された踏力に応じて液圧を発生させるマスタシリンダ7と、ポンプにより液圧を発生させるとともに、ソレノイドバルブによって各車輪3FR,3FL,3RR,3RLのホイルシリンダ9FR,9FL,9RR,9RLに供給する液圧を調整するブレーキアクチュエータユニット10とから構成されている。
4輪駆動車両1の制御系は、エンジン2を制御するエンジンコントロールユニット11、駆動力配分装置5F,5Rを制御する駆動力配分コントロールユニット12、ブレーキアクチュエータユニット10を制御するブレーキコントロールユニット15から構成されている。
【0011】
ブレーキコントロールユニット15には、車輪速度を検出する車輪速度センサ13FR,13FL,13RR,13RLと、4輪駆動車両1の前後方向の加速度を検出する加速度センサ14からの検出値を入力するとともに、エンジンコントロールユニット11、駆動力配分コントロールユニット12と相互通信を行う。そして、入力された各種情報に基づいてブレーキアクチュエータユニット10を制御して、各車輪3FR,3FL,3RR,3RLのホイルシリンダ9FR,9FL,9RR,9RLに液圧を供給する。なお、車輪速度センサ13は本発明の車輪速度検出手段に相当する。また、加速度センサ14は本発明の加速度検出手段に相当する。
エンジンコントロールユニット11は、アクセルペダルの踏み込み量に応じてエンジン2のスロットル開度やエンジン2の単位時間当りの燃料噴射量等を監視する。
【0012】
4輪駆動車両1では、ドライバによって4輪駆動固定選択モードと2輪駆動固定選択モードと4輪-2輪駆動自動選択モードを選択することができる。4輪駆動固定選択モードでは、駆動力配分コントロールユニット12によって常に4つの車輪3FR,3FL,3RR,3RLに動力を伝達するように制御される。2輪駆動固定選択モードでは、駆動力制御装置10によって前輪の2つの車輪3FR,3FLに動力を伝達するように制御される。4輪-2輪駆動自動選択モードでは、駆動力制御装置10によって走行状態に応じて、4輪駆動と2輪駆動とを切り替えるように制御される。
【0013】
[トラクションコントロールシステムについて]
実施例1の4輪駆動車両1では、発進時に車輪3がスピンすると、ブレーキアクチュエータユニット10によってスピンした車輪3のホイルシリンダ9に液圧を供給して車輪3のスピンの発生を抑制する。なお、ブレーキアクチュエータユニット10は本発明の車輪速度抑制手段に相当する。
車輪3にスピンが発生したことは、車体速度に対して車輪速度が大きくなったと判断することで検出することができる。2輪駆動時には従動輪の車輪速度は車体速度とほぼ一致するため、従動輪の車輪速度から車体速度を求める。4輪駆動時には全車輪が駆動輪であるため、加速度センサ14が検出した加速度から車体速度を求める。
【0014】
[加速度センサの誤差によるスリップ誤判断について]
加速度センサ14は4輪駆動車両1の前後方向の加速度を検出する。4輪駆動車両1には、4輪駆動車両1自体が加減速するときに発生する加速度のほか、地球からの重力加速度も作用する。加速度センサ14は4輪駆動車両1の前後方向の加速度を検出するようにしているため、平坦路では4輪駆動車両1自体が加減速するときに発生する加速度のみを検出することができる。しかしながら勾配のある道路では、4輪駆動車両1の前後方向の加速度に重力加速度が含まれるため、4輪駆動車両1自体が加減速するときに発生する加速度のみを検出することができないことがある。特に降坂路において4輪駆動車両1が発進する場合には、加速度センサ14が検出する加速度は4輪駆動車両1自体が発生する加速度よりも小さい値が検出されてしまう。
【0015】
前述のように、4輪駆動車両1は加速度センサ14が検出した加速度から車体速度を求める。降坂路においては4輪駆動車両1自体が発生する加速度よりも小さい値によって車体速度が求められることとなるため、求められた車体速度は実際の4輪駆動車両1の車体速度よりも小さな値となる。また車体速度に対して車輪速度が大きくなると車輪3にスピンが発生したと判断する。そのため、実際には車輪3にスリップが発生していないにも関わらずスリップが発生したと判断してしまい、車輪3の回転を抑制しようとしてブレーキアクチュエータユニット10によって車輪3のホイルシリンダ9に液圧が供給されて、ドライバの意図と関わらず4輪駆動車両1の速度を抑えてしまう。
【0016】
そこで実施例1の4輪駆動車両1では、4輪駆動時であって車両発進時には、車体速度を加速度センサ14が検出した前後方向加速度とは別途に、エンジントルクから前後加速度を算出し、加速度センサ14が検出した前後方向加速度とエンジントルクから算出した前後加速度のうち大きい方を用いて車体速度を求めるようにした。
【0017】
[車体速度算出処理]
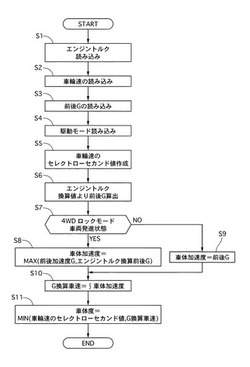
図2はブレーキコントロールユニット15において行われる車体速度算出処理の流れを示すフローチャートである。以下、各ステップについて説明する。
ステップS1では、エンジンコントロールユニット11からエンジン2の出力するエンジントルクを読み込み、ステップS2へ移行する。
ステップS2では、車輪速度センサ13から各車輪3の車輪速度を読み込み、ステップS3へ移行する。
【0018】
ステップS3では、加速度センサ14から前後方向加速度を読み込み、ステップS4へ移行する。
ステップS4では、駆動モードを読み込み、ステップS5へ移行する。駆動モードとは、前述のドライバによって選択される4輪駆動固定選択モードと2輪駆動固定選択モードと4輪-2輪駆動自動選択モードのことを示す。
ステップS5では、車輪速度のセレクトローセカンド値を作成して、ステップS6へ移行する。車輪速度のセレクトローセカンド値とは、各車輪3の車輪速度のうち下から2番目の車輪速度の値を示す。
【0019】
ステップS6では、車両の駆動状態の出力に相当するエンジントルクから4輪駆動車両1の前後加速度を算出し、ステップS7へ移行する。エンジン2の出力であるエンジントルクと、そのときの路面摩擦力が分かれば4輪駆動車両1自体の加速による前後方向加速度を推定することができる。ここでは事前に設定された路面摩擦力を基に前後方向加速度を算出する。算出される前後加速度は、平坦路においては加速度センサ14が検出する前後方向加速度の方が大きくなるように設定する。なお、ステップS6は本発明の加速度推定手段に相当する。
【0020】
ステップS7では、選択された駆動モードが4輪駆動固定選択モードであって、かつ車両発進状態であるか否かを判断し、条件を満たす場合にはステップS8へ移行し、条件を満たさない場合にはステップS10へ移行する。
ステップS8では、加速度センサ14が検出した前後加速度とエンジントルクから算出した前後加速度とを比較して大きい方を4輪駆動車両1の前後加速度として選択して設定し、ステップS10へ移行する。ここでは通常、平坦路では加速度センサ14が検出した前後加速度が選択され、降坂路ではエンジントルクから算出した前後加速度が選択される。なお、ステップS8は本発明の加速度選択手段に相当する。
【0021】
ステップS9では、4輪駆動車両1自体の加速による前後加速度を加速度センサ14が検出した前後加速度に設定し、ステップS10へ移行する。
ステップS10では、4輪駆動車両1の前後加速度を積分して車体速度とし、ステップS11へ移行する。
ステップS11では、車輪速度のセレクトローセカンド値とステップS10において4輪駆動車両1の前後加速度から算出された車体速度とを比較して小さい方を4輪駆動車両1の車体速度として選択し、処理を終了する。
【0022】
[実施例1の構成に基づく作用]
実施例1の車両用トラクションコントロール装置が適用された4輪駆動車両1では、4輪駆動時であって車両発進時には、車体速度を加速度センサ14が検出した前後方向加速度とは別途に、エンジントルクから前後加速度を算出し、加速度センサ14が検出した前後方向加速度とエンジントルクから算出した前後加速度とを比較して大きい方を用いて車体速度を求めるようにした。そして、この車体速度と車輪速度とから車輪3のスリップを検出し、車輪3がスリップしたときはブレーキアクチュエータユニット10によってスピンした車輪3のホイルシリンダ9に液圧を供給して車輪3のスピンの発生を抑制するようにした。
【0023】
そのため、降坂路において4輪駆動による車両発進時においても、前後加速度から車体速度をより正確に算出することが可能となる。よって、ドライバの発進意図と関わらずブレーキアクチュエータユニット10によって車輪3のホイルシリンダ9に液圧を供給することなく、スムーズに4輪駆動車両1を発進させることができる。
【0024】
[実施例1の効果]
実施例1の効果について説明する。
(1)ブレーキコントロールユニット15において、車両のエンジントルクから前後加速度を推定し(ステップS6)、加速度センサ14が検出した車両の前後加速度と、エンジントルクから推定した前後加速度とを比較し大きい方を車両の前後加速度として選択(ステップS8)した。この選択した前後加速度によって車体速度を算出して、車輪速度と車体速度とを比較し、車体速度に対して車輪速度が大きくなるスリップを検出したときには、ブレーキアクチュエータユニット10によって、スリップが発生した車輪3の速度の抑制するようにホイルシリンダ9にブレーキ液圧を供給するようにした。
【0025】
そのため、降坂路において4輪駆動による車両発進時においても、前後加速度から車体速度をより正確に算出することが可能となる。よって、ドライバの発進意図と関わらずブレーキアクチュエータユニット10によって車輪3のホイルシリンダ9に液圧を供給することなく、スムーズに4輪駆動車両1を発進させることができる。
【0026】
(2)エンジントルクを検出するエンジンコントロールユニット11を備え、エンジントルクが大きいほど推定する車両の前後加速度を大きい値と推定する(ステップS6)ようにした。
そのため、路面の勾配に関わらず、路面に対する車両の前後加速度を算出することが可能となり、車体速度をより正確に算出することができる。
【0027】
[他の実施例]
以上、本願発明を実施するための最良の形態を、実施例1に基づいて説明してきたが、各発明の具体的な構成は各実施例に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても、本発明に含まれる。
【0028】
例えば、実施例1ではエンジントルクから4輪駆動車両1の前後加速度を算出したが、ドライバのアクセルペダルの踏み込み量や、エンジン2のスロットル開度や、エンジン2の単位時間当りの燃料噴射量から前後加速度を算出するようにしても良い。このアクセルペダルの踏み込み量、エンジン2のスロットル開度、エンジン2の単位時間当りの燃料噴射量はエンジンコントロールユニット11によって検出することが可能である。
【0029】
更に、上記実施例から把握しうる請求項以外の技術的思想について、以下にその効果と共に記載する。
【0030】
(イ)請求項1に記載の車両用トラクションコントロール装置において、
ドライバのアクセルペダルの操作量を検出するアクセルペダル操作量検出手段を備え、
前記加速度推定手段は、前記アクセルペダルの操作量が大きいほど推定する車両の期待前後加速度を大きい値とすることを特徴とする車両用トラクションコントロール装置。
そのため、路面の勾配に関わらず、路面に対する車両の前後加速度を算出することが可能となり、車体速度をより正確に算出することができる。
【0031】
(ロ)請求項1に記載の車両用トラクションコントロール装置において、
スロットル開度を検出するスロットル開度検出手段を備え、
前記加速度推定手段は、前記スロットル開度が大きいほど推定する車両の前後加速度を大きい値とすることを特徴とする車両用トラクションコントロール装置。
そのため、路面の勾配に関わらず、路面に対する車両の前後加速度を算出することが可能となり、車体速度をより正確に算出することができる。
【0032】
(ハ)請求項1に記載の車両用トラクションコントロール装置において、
エンジンの単位時間当りの燃料噴射量を検出する燃料噴射量検出手段を備え、
前記加速度推定手段は、前記単位時間当りの燃料噴射量が多いほど推定する車両の前後加速度を大きい値とすることを特徴とする車両用トラクションコントロール装置。
そのため、路面の勾配に関わらず、路面に対する車両の前後加速度を算出することが可能となり、車体速度をより正確に算出することができる。
【0033】
(ニ)請求項1に記載の車両用トラクションコントロール装置において、
エアフロメータの吸入空気量を検出する吸入空気量検出手段を備え、
前記加速度推定手段は、前記吸入空気量が多いほど推定する車両の前後加速度を大きい値とすることを特徴とする車両用トラクションコントロール装置。
そのため、路面の勾配に関わらず、路面に対する車両の前後加速度を算出することが可能となり、車体速度をより正確に算出することができる。
【図面の簡単な説明】
【0034】
【図1】実施例1の4輪駆動車両の構成を示す図である。
【図2】実施例1のブレーキコントロールユニットにおいて行われる車体速度算出処理の流れを示すフローチャートである。
【符号の説明】
【0035】
2 エンジン
3FR,3FL,3RR,3RL 車輪
5F,5R 駆動力配分装置
6 ブレーキペダル
9FR,9FL,9RR,9RL ホイルシリンダ
10 ブレーキアクチュエータユニット
11 エンジンコントロールユニット
13FR,13FL,13RR,13RL 車輪速度センサ
14 加速度センサ
15 ブレーキコントロールユニット
【技術分野】
【0001】
本発明は、全輪駆動車両に搭載した車両用トラクションコントロール装置に関する。
【背景技術】
【0002】
この種の技術としては、特許文献1に記載の技術が開示されている。この公報では、加速度センサが検出する加速度に基づいて車体速度を推定している。
【特許文献1】特開平6−107142号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
2輪駆動車両にあっては、車体速度は従動輪の車輪速度と近い値を示すため、従動輪の車輪速度に基づいて車体速度を算出する。一方、全輪駆動車両の場合、全てが駆動輪であるため従動輪が存在しない。そこで、加速度センサを用いて車体速度を算出する。しかしながら、加速度センサは降坂路等においては、実際の車両の路面に対する加速度に対して小さな加速度が検出されてしまうため、車体速度が小さく算出されてしまう。
【0004】
車両発進時に車体速度に対して車輪速度が大きくなるスリップが発生したときに車輪速度を抑制するトラクションコントロール装置において、降坂路等において車体速度が小さく算出されてしまうと、算出した車体速度に対して車輪速度が大きくなってしまい、スリップが発生していないにも関わらず車輪速度を抑制するトラクションコントロールが働いてしまうおそれがあった。
【0005】
本発明は、上記問題に着目してなされたもので、その目的とするところは、スリップが発生していないにも関わらずトラクションコントロールが誤動作することを抑制することができる車両用トラクションコントロール装置を提供することである。
【課題を解決するための手段】
【0006】
上記目的を達成するため、車輪速度を検出する車輪速度検出手段と、車両に作用する加速度から前後加速度を検出する加速度検出手段と、全輪駆動時に前記前後加速度から車体速度を算出する車体速度算出手段と、前記車輪速度と前記車体速度とを比較し、前記車体速度に対して前記車輪速度が大きくなるスリップを検出したときに前記車輪速度の抑制を行う車輪速度抑制手段と、を備えた車両用トラクションコントロール装置において、車両の駆動出力から前後加速度を推定する加速度推定手段と、検出した前記車両の前後加速度と、車両の駆動状態を表す出力から推定した前後加速度とを比較し大きい方を車両の前後加速度として選択する加速度選択手段と、を設けた。
【発明の効果】
【0007】
よって、本発明のトラクションコントロール装置においては、スリップが発生していないにも関わらずトラクションコントロールが誤動作することを抑制することができる。
【発明を実施するための最良の形態】
【0008】
以下、本発明の車両用トラクションコントロール装置を実現する最良の形態を、実施例1において説明する。
【実施例1】
【0009】
[4輪駆動車両の構成の概要]
まず、本発明の車両用トラクションコントロール装置が適用された4輪駆動車両1の構成について説明する。図1は4輪駆動車両1の構成を示すシステム図である。
4輪駆動車両1の駆動系は、原動機であるエンジン2と、エンジン2で発生した動力を車輪3FR,3FL,3RR,3RLに伝達するプロペラシャフト8およびドライブシャフト4FR,4FL,4RR,4RLと、ドライブシャフト4FR,4FL,4RR,4RLへの駆動力を配分を行う駆動力配分装置5F,5Rから構成されている。
【0010】
4輪駆動車両1の制動系は、ブレーキペダル6と、このブレーキペダル6に入力された踏力に応じて液圧を発生させるマスタシリンダ7と、ポンプにより液圧を発生させるとともに、ソレノイドバルブによって各車輪3FR,3FL,3RR,3RLのホイルシリンダ9FR,9FL,9RR,9RLに供給する液圧を調整するブレーキアクチュエータユニット10とから構成されている。
4輪駆動車両1の制御系は、エンジン2を制御するエンジンコントロールユニット11、駆動力配分装置5F,5Rを制御する駆動力配分コントロールユニット12、ブレーキアクチュエータユニット10を制御するブレーキコントロールユニット15から構成されている。
【0011】
ブレーキコントロールユニット15には、車輪速度を検出する車輪速度センサ13FR,13FL,13RR,13RLと、4輪駆動車両1の前後方向の加速度を検出する加速度センサ14からの検出値を入力するとともに、エンジンコントロールユニット11、駆動力配分コントロールユニット12と相互通信を行う。そして、入力された各種情報に基づいてブレーキアクチュエータユニット10を制御して、各車輪3FR,3FL,3RR,3RLのホイルシリンダ9FR,9FL,9RR,9RLに液圧を供給する。なお、車輪速度センサ13は本発明の車輪速度検出手段に相当する。また、加速度センサ14は本発明の加速度検出手段に相当する。
エンジンコントロールユニット11は、アクセルペダルの踏み込み量に応じてエンジン2のスロットル開度やエンジン2の単位時間当りの燃料噴射量等を監視する。
【0012】
4輪駆動車両1では、ドライバによって4輪駆動固定選択モードと2輪駆動固定選択モードと4輪-2輪駆動自動選択モードを選択することができる。4輪駆動固定選択モードでは、駆動力配分コントロールユニット12によって常に4つの車輪3FR,3FL,3RR,3RLに動力を伝達するように制御される。2輪駆動固定選択モードでは、駆動力制御装置10によって前輪の2つの車輪3FR,3FLに動力を伝達するように制御される。4輪-2輪駆動自動選択モードでは、駆動力制御装置10によって走行状態に応じて、4輪駆動と2輪駆動とを切り替えるように制御される。
【0013】
[トラクションコントロールシステムについて]
実施例1の4輪駆動車両1では、発進時に車輪3がスピンすると、ブレーキアクチュエータユニット10によってスピンした車輪3のホイルシリンダ9に液圧を供給して車輪3のスピンの発生を抑制する。なお、ブレーキアクチュエータユニット10は本発明の車輪速度抑制手段に相当する。
車輪3にスピンが発生したことは、車体速度に対して車輪速度が大きくなったと判断することで検出することができる。2輪駆動時には従動輪の車輪速度は車体速度とほぼ一致するため、従動輪の車輪速度から車体速度を求める。4輪駆動時には全車輪が駆動輪であるため、加速度センサ14が検出した加速度から車体速度を求める。
【0014】
[加速度センサの誤差によるスリップ誤判断について]
加速度センサ14は4輪駆動車両1の前後方向の加速度を検出する。4輪駆動車両1には、4輪駆動車両1自体が加減速するときに発生する加速度のほか、地球からの重力加速度も作用する。加速度センサ14は4輪駆動車両1の前後方向の加速度を検出するようにしているため、平坦路では4輪駆動車両1自体が加減速するときに発生する加速度のみを検出することができる。しかしながら勾配のある道路では、4輪駆動車両1の前後方向の加速度に重力加速度が含まれるため、4輪駆動車両1自体が加減速するときに発生する加速度のみを検出することができないことがある。特に降坂路において4輪駆動車両1が発進する場合には、加速度センサ14が検出する加速度は4輪駆動車両1自体が発生する加速度よりも小さい値が検出されてしまう。
【0015】
前述のように、4輪駆動車両1は加速度センサ14が検出した加速度から車体速度を求める。降坂路においては4輪駆動車両1自体が発生する加速度よりも小さい値によって車体速度が求められることとなるため、求められた車体速度は実際の4輪駆動車両1の車体速度よりも小さな値となる。また車体速度に対して車輪速度が大きくなると車輪3にスピンが発生したと判断する。そのため、実際には車輪3にスリップが発生していないにも関わらずスリップが発生したと判断してしまい、車輪3の回転を抑制しようとしてブレーキアクチュエータユニット10によって車輪3のホイルシリンダ9に液圧が供給されて、ドライバの意図と関わらず4輪駆動車両1の速度を抑えてしまう。
【0016】
そこで実施例1の4輪駆動車両1では、4輪駆動時であって車両発進時には、車体速度を加速度センサ14が検出した前後方向加速度とは別途に、エンジントルクから前後加速度を算出し、加速度センサ14が検出した前後方向加速度とエンジントルクから算出した前後加速度のうち大きい方を用いて車体速度を求めるようにした。
【0017】
[車体速度算出処理]
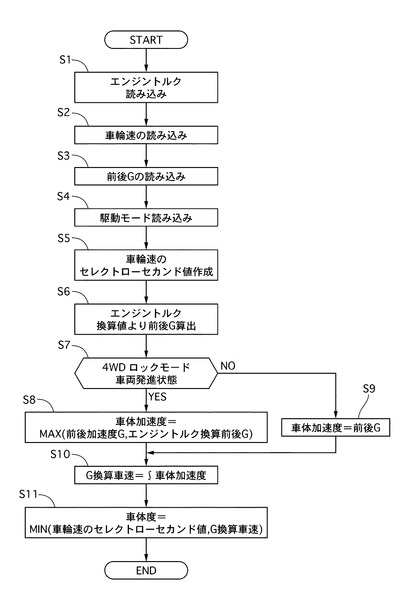
図2はブレーキコントロールユニット15において行われる車体速度算出処理の流れを示すフローチャートである。以下、各ステップについて説明する。
ステップS1では、エンジンコントロールユニット11からエンジン2の出力するエンジントルクを読み込み、ステップS2へ移行する。
ステップS2では、車輪速度センサ13から各車輪3の車輪速度を読み込み、ステップS3へ移行する。
【0018】
ステップS3では、加速度センサ14から前後方向加速度を読み込み、ステップS4へ移行する。
ステップS4では、駆動モードを読み込み、ステップS5へ移行する。駆動モードとは、前述のドライバによって選択される4輪駆動固定選択モードと2輪駆動固定選択モードと4輪-2輪駆動自動選択モードのことを示す。
ステップS5では、車輪速度のセレクトローセカンド値を作成して、ステップS6へ移行する。車輪速度のセレクトローセカンド値とは、各車輪3の車輪速度のうち下から2番目の車輪速度の値を示す。
【0019】
ステップS6では、車両の駆動状態の出力に相当するエンジントルクから4輪駆動車両1の前後加速度を算出し、ステップS7へ移行する。エンジン2の出力であるエンジントルクと、そのときの路面摩擦力が分かれば4輪駆動車両1自体の加速による前後方向加速度を推定することができる。ここでは事前に設定された路面摩擦力を基に前後方向加速度を算出する。算出される前後加速度は、平坦路においては加速度センサ14が検出する前後方向加速度の方が大きくなるように設定する。なお、ステップS6は本発明の加速度推定手段に相当する。
【0020】
ステップS7では、選択された駆動モードが4輪駆動固定選択モードであって、かつ車両発進状態であるか否かを判断し、条件を満たす場合にはステップS8へ移行し、条件を満たさない場合にはステップS10へ移行する。
ステップS8では、加速度センサ14が検出した前後加速度とエンジントルクから算出した前後加速度とを比較して大きい方を4輪駆動車両1の前後加速度として選択して設定し、ステップS10へ移行する。ここでは通常、平坦路では加速度センサ14が検出した前後加速度が選択され、降坂路ではエンジントルクから算出した前後加速度が選択される。なお、ステップS8は本発明の加速度選択手段に相当する。
【0021】
ステップS9では、4輪駆動車両1自体の加速による前後加速度を加速度センサ14が検出した前後加速度に設定し、ステップS10へ移行する。
ステップS10では、4輪駆動車両1の前後加速度を積分して車体速度とし、ステップS11へ移行する。
ステップS11では、車輪速度のセレクトローセカンド値とステップS10において4輪駆動車両1の前後加速度から算出された車体速度とを比較して小さい方を4輪駆動車両1の車体速度として選択し、処理を終了する。
【0022】
[実施例1の構成に基づく作用]
実施例1の車両用トラクションコントロール装置が適用された4輪駆動車両1では、4輪駆動時であって車両発進時には、車体速度を加速度センサ14が検出した前後方向加速度とは別途に、エンジントルクから前後加速度を算出し、加速度センサ14が検出した前後方向加速度とエンジントルクから算出した前後加速度とを比較して大きい方を用いて車体速度を求めるようにした。そして、この車体速度と車輪速度とから車輪3のスリップを検出し、車輪3がスリップしたときはブレーキアクチュエータユニット10によってスピンした車輪3のホイルシリンダ9に液圧を供給して車輪3のスピンの発生を抑制するようにした。
【0023】
そのため、降坂路において4輪駆動による車両発進時においても、前後加速度から車体速度をより正確に算出することが可能となる。よって、ドライバの発進意図と関わらずブレーキアクチュエータユニット10によって車輪3のホイルシリンダ9に液圧を供給することなく、スムーズに4輪駆動車両1を発進させることができる。
【0024】
[実施例1の効果]
実施例1の効果について説明する。
(1)ブレーキコントロールユニット15において、車両のエンジントルクから前後加速度を推定し(ステップS6)、加速度センサ14が検出した車両の前後加速度と、エンジントルクから推定した前後加速度とを比較し大きい方を車両の前後加速度として選択(ステップS8)した。この選択した前後加速度によって車体速度を算出して、車輪速度と車体速度とを比較し、車体速度に対して車輪速度が大きくなるスリップを検出したときには、ブレーキアクチュエータユニット10によって、スリップが発生した車輪3の速度の抑制するようにホイルシリンダ9にブレーキ液圧を供給するようにした。
【0025】
そのため、降坂路において4輪駆動による車両発進時においても、前後加速度から車体速度をより正確に算出することが可能となる。よって、ドライバの発進意図と関わらずブレーキアクチュエータユニット10によって車輪3のホイルシリンダ9に液圧を供給することなく、スムーズに4輪駆動車両1を発進させることができる。
【0026】
(2)エンジントルクを検出するエンジンコントロールユニット11を備え、エンジントルクが大きいほど推定する車両の前後加速度を大きい値と推定する(ステップS6)ようにした。
そのため、路面の勾配に関わらず、路面に対する車両の前後加速度を算出することが可能となり、車体速度をより正確に算出することができる。
【0027】
[他の実施例]
以上、本願発明を実施するための最良の形態を、実施例1に基づいて説明してきたが、各発明の具体的な構成は各実施例に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても、本発明に含まれる。
【0028】
例えば、実施例1ではエンジントルクから4輪駆動車両1の前後加速度を算出したが、ドライバのアクセルペダルの踏み込み量や、エンジン2のスロットル開度や、エンジン2の単位時間当りの燃料噴射量から前後加速度を算出するようにしても良い。このアクセルペダルの踏み込み量、エンジン2のスロットル開度、エンジン2の単位時間当りの燃料噴射量はエンジンコントロールユニット11によって検出することが可能である。
【0029】
更に、上記実施例から把握しうる請求項以外の技術的思想について、以下にその効果と共に記載する。
【0030】
(イ)請求項1に記載の車両用トラクションコントロール装置において、
ドライバのアクセルペダルの操作量を検出するアクセルペダル操作量検出手段を備え、
前記加速度推定手段は、前記アクセルペダルの操作量が大きいほど推定する車両の期待前後加速度を大きい値とすることを特徴とする車両用トラクションコントロール装置。
そのため、路面の勾配に関わらず、路面に対する車両の前後加速度を算出することが可能となり、車体速度をより正確に算出することができる。
【0031】
(ロ)請求項1に記載の車両用トラクションコントロール装置において、
スロットル開度を検出するスロットル開度検出手段を備え、
前記加速度推定手段は、前記スロットル開度が大きいほど推定する車両の前後加速度を大きい値とすることを特徴とする車両用トラクションコントロール装置。
そのため、路面の勾配に関わらず、路面に対する車両の前後加速度を算出することが可能となり、車体速度をより正確に算出することができる。
【0032】
(ハ)請求項1に記載の車両用トラクションコントロール装置において、
エンジンの単位時間当りの燃料噴射量を検出する燃料噴射量検出手段を備え、
前記加速度推定手段は、前記単位時間当りの燃料噴射量が多いほど推定する車両の前後加速度を大きい値とすることを特徴とする車両用トラクションコントロール装置。
そのため、路面の勾配に関わらず、路面に対する車両の前後加速度を算出することが可能となり、車体速度をより正確に算出することができる。
【0033】
(ニ)請求項1に記載の車両用トラクションコントロール装置において、
エアフロメータの吸入空気量を検出する吸入空気量検出手段を備え、
前記加速度推定手段は、前記吸入空気量が多いほど推定する車両の前後加速度を大きい値とすることを特徴とする車両用トラクションコントロール装置。
そのため、路面の勾配に関わらず、路面に対する車両の前後加速度を算出することが可能となり、車体速度をより正確に算出することができる。
【図面の簡単な説明】
【0034】
【図1】実施例1の4輪駆動車両の構成を示す図である。
【図2】実施例1のブレーキコントロールユニットにおいて行われる車体速度算出処理の流れを示すフローチャートである。
【符号の説明】
【0035】
2 エンジン
3FR,3FL,3RR,3RL 車輪
5F,5R 駆動力配分装置
6 ブレーキペダル
9FR,9FL,9RR,9RL ホイルシリンダ
10 ブレーキアクチュエータユニット
11 エンジンコントロールユニット
13FR,13FL,13RR,13RL 車輪速度センサ
14 加速度センサ
15 ブレーキコントロールユニット
【特許請求の範囲】
【請求項1】
車輪速度を検出する車輪速度検出手段と、
車両に作用する加速度から前後加速度を検出する加速度検出手段と、
全輪駆動時に前記前後加速度から車体速度を算出する車体速度算出手段と、
前記車輪速度と前記車体速度とを比較し、前記車体速度に対して前記車輪速度が大きくなるスリップを検出したときに前記車輪速度の抑制を行う車輪速度抑制手段と、
を備えた車両用トラクションコントロール装置において、
車両の駆動状態を表す出力から前後加速度を推定する加速度推定手段と、
検出した前記車両の前後加速度と、車両の駆動出力から推定した前後加速度と、を比較し大きい方を車両の前後加速度として選択する加速度選択手段と、
を設けたことを特徴とする車両用トラクションコントロール装置。
【請求項2】
請求項1に記載の車両用トラクションコントロール装置において、
エンジン出力を検出するエンジン出力検出手段を備え、
前記加速度推定手段は、前記エンジン出力が大きいほど推定する車両の前後加速度を大きい値とすることを特徴とする車両用トラクションコントロール装置。
【請求項1】
車輪速度を検出する車輪速度検出手段と、
車両に作用する加速度から前後加速度を検出する加速度検出手段と、
全輪駆動時に前記前後加速度から車体速度を算出する車体速度算出手段と、
前記車輪速度と前記車体速度とを比較し、前記車体速度に対して前記車輪速度が大きくなるスリップを検出したときに前記車輪速度の抑制を行う車輪速度抑制手段と、
を備えた車両用トラクションコントロール装置において、
車両の駆動状態を表す出力から前後加速度を推定する加速度推定手段と、
検出した前記車両の前後加速度と、車両の駆動出力から推定した前後加速度と、を比較し大きい方を車両の前後加速度として選択する加速度選択手段と、
を設けたことを特徴とする車両用トラクションコントロール装置。
【請求項2】
請求項1に記載の車両用トラクションコントロール装置において、
エンジン出力を検出するエンジン出力検出手段を備え、
前記加速度推定手段は、前記エンジン出力が大きいほど推定する車両の前後加速度を大きい値とすることを特徴とする車両用トラクションコントロール装置。
【図1】


【図2】
【図2】
【公開番号】特開2008−222008(P2008−222008A)
【公開日】平成20年9月25日(2008.9.25)
【国際特許分類】
【出願番号】特願2007−62723(P2007−62723)
【出願日】平成19年3月13日(2007.3.13)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成20年9月25日(2008.9.25)
【国際特許分類】
【出願日】平成19年3月13日(2007.3.13)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]