
車両用ナビゲーションシステム及び車両用ナビゲーションシステムにおける位置情報の補正方法、並びに、情報配信サーバ及び車載ナビゲーション装置
【課題】車車間通信を利用して他車両を認識することができない状況であっても、自車両位置を精度よく補正することができる車両用ナビゲーションシステムを提供する。
【解決手段】車両用ナビゲーションシステムにおいて、情報配信センタ50は、路上目標物の位置に基づいて車両位置を補正してその補正に使用した情報を送信してきた任意の車両の付近に存在する他車両であって位置補正が完了していない他車両を特定すると共に、当該任意の車両から送信されてきた路上目標物の位置情報と、当該他車両から送信されてきた当該他車両の位置情報との位置関係に基づいて、当該他車両の位置情報を推定し、当該他車両の車両位置の補正に必要となる情報として当該他車両に対して送信する。そして、他車両に搭載されている車載ナビゲーション装置10は、情報配信センタ50から送信された情報に基づいて、車両位置を補正する。
【解決手段】車両用ナビゲーションシステムにおいて、情報配信センタ50は、路上目標物の位置に基づいて車両位置を補正してその補正に使用した情報を送信してきた任意の車両の付近に存在する他車両であって位置補正が完了していない他車両を特定すると共に、当該任意の車両から送信されてきた路上目標物の位置情報と、当該他車両から送信されてきた当該他車両の位置情報との位置関係に基づいて、当該他車両の位置情報を推定し、当該他車両の車両位置の補正に必要となる情報として当該他車両に対して送信する。そして、他車両に搭載されている車載ナビゲーション装置10は、情報配信センタ50から送信された情報に基づいて、車両位置を補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車両のルート案内を行う車両用ナビゲーションシステム及び車両用ナビゲーション方法、並びに、これら車両用ナビゲーションシステム及び車両用ナビゲーション方法に用いられる情報配信サーバ及び車載ナビゲーション装置に関する。
【背景技術】
【0002】
従来、車車間通信を利用して他車両が認識している他車両位置を取得し、当該他車両位置と、自車両が認識している当該他車両との車両間の位置関係(相対距離)とに基づいて、自車両位置を補正する技術が提案されている(例えば、特許文献1参照。)。
【特許文献1】特開2007−178270号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、上述した特許文献1に記載された従来の技術においては、他車両自身が認識している他車両位置と、自車両で取得した他車両との間の相対距離とに基づいて自車両位置を補正している。したがって、自車両によって車間距離センサや外界認識カメラ等を用いて他車両との相対距離を正確に認識することができない状況では、自車両位置を精度よく補正することができない場合があった。
【0004】
そこで、本発明は、上述した実情に鑑みて提案されたものであり、車車間通信を利用して他車両を認識することができない状況であっても、自車両位置を精度よく補正することができる車両用ナビゲーションシステム及び車両用ナビゲーションシステムにおける位置情報の補正方法、並びに、情報配信サーバ及び車載ナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明は、上述の課題を解決するために、任意の車両から送信されてきた路上目標物の位置情報と、任意の車両の付近に存在する他車両から送信されてきた当該他車両の位置情報との位置関係に基づいて、当該他車両の位置情報を推定する。そして、推定された他車両の位置情報を含む情報に基づいて、当該他車両の車両位置を補正する。
【発明の効果】
【0006】
本発明によれば、任意の車両から取得した路上目標物の位置情報と、他車両から取得した当該他車両の位置情報との位置関係に基づいて、当該他車両の位置情報を推定して、他車両の車両位置を補正するので、車車間通信を利用して他車両を認識することができない状況であっても、自車両位置を精度よく補正することができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明を適用した車両用ナビゲーションシステムについて図面を参照して具体的に説明する。
【0008】
[車両用ナビゲーションシステムの構成]
本発明の実施形態として示す車両用ナビゲーションシステムは、プローブやテレマティクスと称される機能を利用するものである。具体的には、周期的に車両と情報配信センタとが交信し、車両が、自車両位置や旅行時間等の情報の他、作動状況等の情報を当該情報配信センタに提供すると共に、当該情報配信センタから周辺地域の交通情報や他車両の車載システムの作動状況から推定された路面状況情報等を取得する。これにより、車両では、取得した各種の情報に基づいて、案内中のルートを更新することができるものである。
【0009】
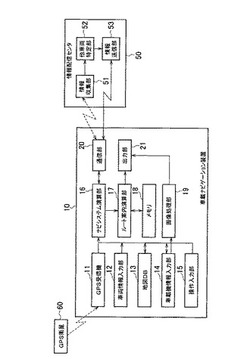
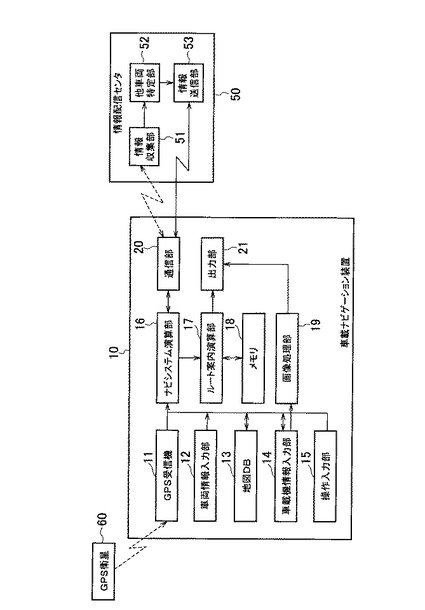
この車両用ナビゲーションシステムは、図1に示すように、自車両内に搭載される車載ナビゲーション装置10と、この車載ナビゲーション装置10に情報を配信する情報配信センタ50とを備える。
【0010】
車載ナビゲーション装置10は、GPS(Global Positioning System)衛星60からの信号を受信するGPS受信機11と、自車両の走行状態情報を入力する車両情報入力部12と、地図データを格納する地図データベース13と、自車両の各種車載機の情報を入力する車載機情報入力部14と、運転者が各種操作入力を行う操作入力部15と、自車両位置の算出を含む各種演算を行うナビシステム演算部16と、案内ルートを決定するための各種演算を行うルート案内演算部17と、各種情報を一時的に格納するメモリ18と、所定の画像処理を行う画像処理部19と、情報配信センタ50との間で情報の授受を行う通信部20と、運転者に提示する情報を出力する出力部21とを有する。
【0011】
GPS受信機11は、自車両位置の算出に用いるために、GPS衛星60から送信されたGPS信号を受信する。GPS受信機11は、受信したGPS信号をナビシステム演算部16に供給する。これによりナビシステム演算部16は、GPS信号を用いて自車位置を演算する。
【0012】
車両情報入力部12は、例えば、自車両の車速、操舵角、ヨーレート、加速度等、自車両の走行状態を示す走行状態情報を、図示しない各種センサから読み出して当該車載ナビゲーション装置10に入力する。車両情報入力部12は、入力した走行状態情報をナビシステム演算部16に供給する。
【0013】
地図データベース13は、例えばハードディスク、CD、MD、DVD、光ディスク、又は、FDD等、一般的な記憶媒体を用いて構成され、自車両のルート案内を行う際に用いる道路情報(リンク情報)を含む地図データを格納する。なお、この地図データベース13に格納されている地図データには、特定の路上目標物等の各種ノードが、その緯度及び経度等の位置情報に関連付けられて格納されている。この地図データベース13に格納された地図データは、ナビシステム演算部16によって読み出される。
【0014】
車載機情報入力部14は、例えば、路上に設置されたビーコン送信機から送信されたビーコン信号を受信するビーコン受信機、ETC(Electronic Toll Collection System)ゲートから送信されたゲート信号を受信するETC受信機、路面を撮像する路面カメラ、他車両を含む自車両周囲の外界を認識する外界認識センサ等を踏む。車載機情報入力部14は、自車両に搭載されている各種車載機によって得られた車載機情報を当該車載ナビゲーション装置10に入力する。車載機情報入力部14は、入力した車載機情報をナビシステム演算部16及び画像処理部19に供給する。
【0015】
操作入力部15は、スイッチやダイヤル機構等、運転者が各種操作入力を行うための操作子である。この操作入力部15を介して入力された操作情報は、ナビシステム演算部16に供給される。
【0016】
ナビシステム演算部16は、例えば、CPU(Central Processing Unit)、MPU(Micro Processing Unit)、DSP(Digital Signal Processor)、ASIC(Application Specific Integrated Circuit)、又は、FPGA(Field Programmable Gate Array)等を用いて実装される。ナビシステム演算部16は、GPS受信機11から供給されたGPS信号、車両情報入力部12から供給された走行状態情報、及び、地図データベース13から供給された地図データに基づいて、ナビゲーションを行うのに必要となる自車両位置の算出を含む各種演算を行う。
【0017】
また、ナビシステム演算部16は、自車両位置を補正するために、車載機情報入力部14から供給された車載機情報に基づいて、例えば、路上に設置されたビーコン送信機、ETCゲート、路上ペイント、路傍標識等、特定の路上目標物を自車両が通過した旨を検出する。ナビシステム演算部16は、自車両が特定の路上目標物を通過した旨を検出した場合には、例えば地図データベース13に格納されている当該路上目標物の緯度及び経度情報等、予め当該路上目標物と関連付けられている位置情報を読み出し、自車両位置の補正を行う。
【0018】
さらに、ナビシステム演算部16は、各種の情報を通信部20に供給し、情報配信センタ50に送信させる。例えば、GPS信号を受信しているGPS衛星60の個数や衛星名、受信時刻等、GPS信号の受信状況を示す受信状況情報や、GPS信号に基づいて算出した自車両位置情報や、地図データベース13から読み出した地図データと車両情報入力部12から供給された走行状態情報とに基づくマップマッチング等によって算出した自車両位置情報や、現在時刻情報や、補正した自車両位置情報や、自車両の走行状態情報や、交通情報、旅行時間情報、天候情報、車載機情報等を通信部20から情報配信センタ50に送信させる。
【0019】
特に、ナビシステム演算部16は、特定の路上目標物等に基づいて自車両位置の補正を完了した場合には、補正の際に算出しているGPS信号に基づく自車両位置情報と、補正に使用した路上目標物の位置等の情報との差異や、補正の際に算出しているマップマッチング等による自車両位置情報と、補正に使用した情報との差異等を示す情報を、通信部20を介して情報配信センタ50に送信させる。
【0020】
さらにまた、ナビシステム演算部16は、通信部20を介して、自車両位置の補正に必要となる情報若しくは情報配信センタ50によって推定された補正後の自車両位置情報や、自車両付近の交通情報、天候情報、路面状況情報等を情報配信センタ50から受信し、他の情報と共に、ルート案内演算部17に供給する。
【0021】
ルート案内演算部17は、例えば、CPU、MPU、DSP、ASIC、又は、FPGA等を用いて実装される。ルート案内演算部17は、ナビシステム演算部16から供給された各種情報に基づいて、案内ルートを決定するための各種演算を行う。ルート案内演算部17は、決定した案内ルート情報を出力部21に供給する。
【0022】
メモリ18は、情報配信センタ50に送信される各種情報を一時的に格納する。このメモリ18に格納された情報は、ルート案内演算部17を介してナビシステム演算部16によって適宜読み出され、情報配信センタ50に送信される。また、このメモリ18に格納された情報のうち、自車両位置の補正に使用された情報は、その補正が完了した場合に読み出され、情報配信センタ50に送信される。
【0023】
画像処理部19は、車載機情報入力部14から供給された車載機情報のうち、路面カメラや外界認識センサ等から得られた情報に対して所定の画像処理を行い、得られた画像情報を出力部21に供給する。
【0024】
通信部20は、例えば、DCM(Data communication module)等から構成され、携帯電話通信網や所定の無線通信網若しくは地上波データ放送や衛星放送等の放送網を介して、外部の情報配信センタ50との間で通信を行う。具体的には、通信部20は、ナビシステム演算部16から供給されたGPS信号の受信状況情報や、自車両位置情報、現在時刻情報、自車両位置の補正に使用した情報、自車両の走行状態情報、交通情報、旅行時間情報、天候情報、車載機情報等を情報配信センタ50に送信する。また、通信部20は、情報配信センタ50から送信された自車両位置の補正に必要となる情報若しくは情報配信センタ50によって算出された補正後の自車両位置情報や、自車両付近の交通情報、天候情報、路面状況情報等を受信し、ナビシステム演算部16に供給する。
【0025】
出力部21は、例えば液晶ディスプレイ等の表示装置やスピーカ等の音声出力装置等から構成され、ルート案内演算部17から供給された案内ルート情報や画像処理部19から供給された画像情報を、運転者が認識可能な形態で出力する。
【0026】
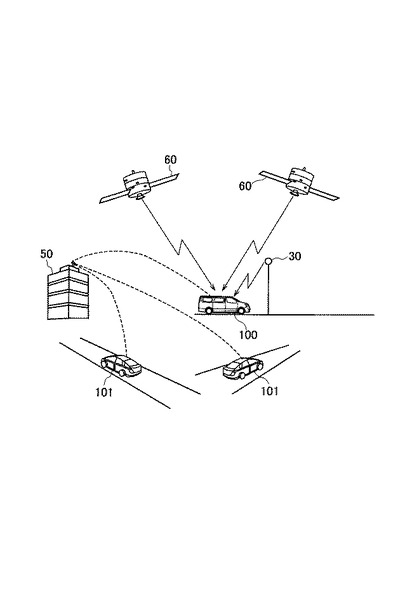
このような車載ナビゲーション装置10は、例えば図2に示すように、GPS衛星60から受信したGPS信号に基づいて自車両位置を算出すると共に、緯度及び経度が特定されている路上目標物30に関する情報や情報配信センタ50から受信した情報に基づいて、自車両位置を補正する。
【0027】
一方、情報配信センタ50は、その情報配信サーバの機能として、各車両から情報を収集する情報収集部51と、任意の車両の付近に存在する他車両の位置を特定する他車両特定部52と、車載ナビゲーション装置10に情報を送信する情報送信部53とを有する。
【0028】
情報収集部51は、携帯電話通信網や所定の無線通信網若しくは地上波データ放送や衛星放送等の放送網を介して、各車両から送信された当該車両の位置情報を含む各種情報を収集する。具体的には、情報収集部51は、各車両に搭載されている車載ナビゲーション装置10における通信部20から送信された情報を受信し、各車両の位置情報を含むプローブデータを収集する。情報収集部51は、収集した情報を図示しないプローブデータ格納部に蓄積したり、他車両特定部52に供給したりする。
【0029】
他車両特定部52は、CPU、MPU、DSP、ASIC、又は、FPGA等を用いて実装され、情報収集部51から供給された情報に基づいて、各車両の付近に存在する他車両であって位置補正が完了していない他車両を特定する。具体的には、他車両特定部52は、路上目標物の位置に基づいて車両位置を補正してその補正に使用した情報を送信してきた任意の車両の付近に存在する他車両を特定し、当該任意の車両から送信されてきた路上目標物の緯度及び経度からなる位置情報と、当該他車両から送信されてきた当該他車両の緯度及び経度からなる位置情報との位置関係に基づいて、当該他車両の絶対座標位置からなる位置情報を推定する。他車両特定部52は、各車両について特定した他車両の位置情報を含む各種情報を、情報送信部53を介して各車両の車載ナビゲーション装置10に対して送信させる。
【0030】
情報送信部53は、他車両特定部52から供給された位置情報を含む車両位置の補正に必要となる情報若しくは情報配信センタ50によって推定された補正後の車両位置情報やその推定時刻情報、自車両付近の交通情報、天候情報、路面状況情報等を、各車両の車載ナビゲーション装置10に送信する。より具体的には、情報送信部53は、車両位置の補正に必要となる情報として、車両位置の補正が完了した他車両におけるGPS信号の受信状況情報や、車両位置の補正が完了した他車両における、補正の際に算出しているGPS信号に基づく自車両位置情報と、補正に使用した路上目標物の位置等の情報との差異や、車両位置の補正が完了した他車両における、補正の際に算出しているマップマッチング等による自車両位置情報と、補正に使用した情報との差異等を示す情報を、各車両の車載ナビゲーション装置10に送信する。
【0031】
このような情報配信センタ50は、情報収集部51によって各車両のGPS信号の受信状況情報、各車両の位置情報、各車両の走行状態情報、及び、各車両が保有している交通情報等を収集して管理することにより、地域毎の交通状況等を把握し、適宜情報配信先を決定して各車両に必要となる情報を配信する。
【0032】
[車両用ナビゲーションシステムの動作]
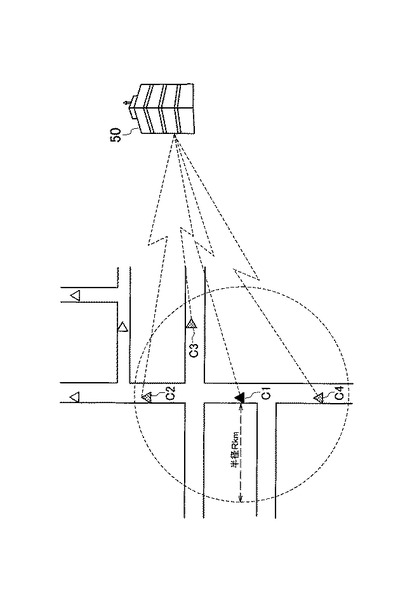
このような車載ナビゲーション装置10と情報配信センタ50とを備える車両用ナビゲーションシステムにおいて、情報配信センタ50は、例えば図3に示すように、自車両位置の補正が完了した少なくとも1台の車両C1から補正に使用した情報を情報収集部51によって受信したとする。この場合に、情報配信センタ50の他車両特定部52は、その補正が完了した車両C1の付近に存在する他車両であって位置補正が完了していない他車両C2,C3,C4を特定し、情報の配信先の候補車両として決定する。
【0033】
情報配信センタ50は、他車両特定部52により、補正が完了した車両C1から受信している補正に使用した情報に基づいて、各候補車両C2,C3,C4の位置を補正する演算を行い、適宜把握している当該候補車両C2,C3,C4の位置との比較を行う。そして、情報配信センタ50は、補正して求めた候補車両C2,C3,C4の位置と、適宜把握している当該候補車両C2,C3,C4の位置との差異が所定範囲を超えているかを判断する。判断の結果、位置の差異が所定範囲を超えている候補車両C2,C3,C4がある場合には、情報送信部53を介して、当該候補車両C2,C3,C4に対して、その位置の補正に必要となる情報や、他車両特定部52によって算出された補正後の候補車両C2,C3,C4についての車両位置情報等を配信する。
【0034】
これに応じて、位置の補正に必要となる情報を受信し且つ位置補正を完了していない他車両C2,C3,C4は、受信した補正に必要となる情報に含まれる各種情報を分析する。すなわち、車両が移動体であることや情報配信センタ50との間で行われる通信に関する時間的な差異等に起因して、情報配信センタ50によって推定された候補車両C2,C3,C4の位置と、これら候補車両C2,C3,C4の実際の位置との間には誤差がある。そのため、候補車両C2,C3,C4は、受信した情報を分析し、その情報に基づいて補正した自車両位置と、補正前の現在認識している自車両位置とを逐次比較する。そして、補正後の自車両位置と現在認識している自車両位置との差異が所定範囲を超えている場合には、現在認識している自車両位置を、補正後の自車両位置に置き換える。
【0035】
ここで、車両用ナビゲーションシステムは、自車両位置の補正に必要となる路上目標物を複数重複なく指定することにより、車両C1のように自車両位置の補正が完了する車両が逐次発生することになる。情報配信センタ50は、当該車両から情報を逐次受信し、他車両C2,C3,C4のように位置補正が完了していない他車両へ逐次配信することになる。これに応じて、位置補正が完了していない他車両は、位置補正に必要となる情報が逐次配信されるので、その位置補正を逐次行うことになる。
【0036】
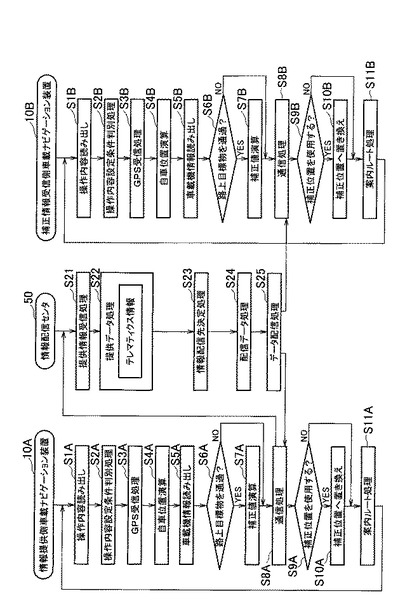
具体的には、車両用ナビゲーションシステムにおいては、図4に示すような一連の手順にしたがって、各車両の位置補正を行う。なお、ここでは、自車両位置の補正を完了して情報配信センタ50に対して情報を送信する車両に搭載されている車載ナビゲーション装置10を「車載ナビゲーション装置10A」と称すると共に、当該車両の付近に存在する他車両であって位置補正を完了していない情報受信側の他車両に搭載されている車載ナビゲーション装置10を「車載ナビゲーション装置10B」と称するものとする。
【0037】
まず、車載ナビゲーション装置10Aにおけるナビシステム演算部16は、図4に示すように、通常時は、ステップS1Aにおいて、運転者による操作入力部15を介した操作内容を読み出し、ステップS2Aにおいて、読み出した操作内容に応じた設定条件を判別し、当該車載ナビゲーション装置10Aの処理を決定する。
【0038】
続いて、車載ナビゲーション装置10Aにおけるナビシステム演算部16は、ステップS3Aにおいて、GPS受信機11によって受信したGPS信号を取得し、ステップS4Aにおいて、地図データベース13から読み出した地図データと、車両情報入力部12から取得した走行状態情報とに基づいて、マップマッチング等を行い、自車両位置を算出する。このとき、ナビシステム演算部16は、算出した自車両位置情報と共に、自車両が走行した経路や、そのときの交通情報及び路面状況情報等もメモリ18に格納する。
【0039】
また、車載ナビゲーション装置10Aにおけるナビシステム演算部16は、ステップS5Aにおいて、車載機情報入力部14から車載機情報を適宜取得し、ステップS6Aにおいて、自車両が特定の路上目標物を通過したか否かを判定する。
【0040】
ここで、車載ナビゲーション装置10Aは、自車両が特定の路上目標物を通過していない場合には、ステップS8Aへと処理を移行する一方で、自車両が特定の路上目標物を通過した場合には、ステップS7Aにおいて、ナビシステム演算部16によって自車両位置の補正値を算出する。ここでは、車載ナビゲーション装置10Aは、自車両位置の補正を完了する車両に搭載されているので、ステップS7Aへと処理を移行することになる。
【0041】
例えば、車載ナビゲーション装置10Aは、ステップS7Aにおいて、路上目標物が光ビーコン送信機である場合には、自車両が光ビーコン送信機を通過した際に受信した当該光ビーコン送信機のビーコン番号を車載機情報入力部14によって入力する。そして、車載ナビゲーション装置10Aは、予めビーコン番号とその緯度及び経度とを関連付けた情報を地図データベース13に格納しておき、自車両が光ビーコン送信機を通過した際に、地図データベース13からビーコン番号に関連付けられている緯度及び経度情報をナビシステム演算部16によって読み出し、自車両位置の補正値を算出する。
【0042】
なお、車両用ナビゲーションシステムは、光ビーコン送信機等の特定の路上目標物の緯度及び経度情報を情報配信センタ50に記憶させておき、自車両が光ビーコン送信機を通過した際に、その旨を情報配信センタ50に通知することにより、情報配信センタ50によって位置補正を行うようにしてもよい。車載ナビゲーション装置10Aにおけるナビシステム演算部16は、自車両位置の補正値を算出すると、GPS信号の受信状況情報や補正前の自車両位置情報等と共に、車両位置の補正に必要となる情報としてメモリ18に格納する。
【0043】
そして、車載ナビゲーション装置10Aは、ステップS8Aにおいて、交通情報等を含め、メモリ18に格納されている情報を、車両位置の補正に必要となる情報として、通信部20を介して情報配信センタ50に送信する。
【0044】
その後、車載ナビゲーション装置10Aは、ステップS9Aにおいて、現在認識している自車両位置を、ステップS7Aにて算出した補正値に基づく補正後の自車両位置に置き換えるか否かを判定し、置き換える場合には、ステップS10Aにおいて、補正後の自車両位置に置き換えた後、ステップS11Aにおいて、ルート案内演算部17により、案内ルートを決定するための各種演算を行い、出力部21を介して必要な情報を出力し、ステップS1Aからの処理を繰り返すことになる。
【0045】
また、情報受信側である車載ナビゲーション装置10Bも、車載ナビゲーション装置10Aと同様の処理を行う。
【0046】
すなわち、車載ナビゲーション装置10Bにおけるナビシステム演算部16は、通常時は、ステップS1Bにおいて、運転者による操作入力部15を介した操作内容を読み出し、ステップS2Bにおいて、読み出した操作内容に応じた設定条件を判別し、当該車載ナビゲーション装置10Bの処理を決定すると、ステップS3Bにおいて、GPS受信機11によって受信したGPS信号を取得し、ステップS4Bにおいて、自車両位置を算出する。
【0047】
続いて、車載ナビゲーション装置10Bにおけるナビシステム演算部16は、ステップS5Bにおいて、車載機情報入力部14から車載機情報を適宜取得し、ステップS6Bにおいて、自車両が特定の路上目標物を通過したか否かを判定する。
【0048】
ここでは、車載ナビゲーション装置10Bは、自車両位置の補正を完了していない車両に搭載されているので、ステップS8Bへと処理を移行することになる。車載ナビゲーション装置10Bは、自車両が特定の路上目標物を通過していない場合、すなわち、GPS信号以外の情報に基づいて自車両位置を補正することができない場合には、ステップS8Bにおいて、交通情報等を含め、メモリ18に格納されている情報を、通信部20を介して情報配信センタ50に対して送信すると共に、交通情報等と共に自車両位置の補正に必要となる情報を、通信部20を介して情報配信センタ50から受信し、メモリ18に格納する。
【0049】
続いて、車載ナビゲーション装置10Bにおけるナビシステム演算部16は、ステップS9Bにおいて、自車両位置の補正に必要となる情報をメモリ18から読み出し、自車両のGPS受信機11によって受信したGPS信号の受信状況情報と、情報配信センタ50から配信されたGPS信号の受信状況情報とを比較すると共に、情報配信センタ50から配信された情報に基づく位置補正演算によって得られた補正後の自車両位置と、現在自車両が認識している自車両位置とを比較し、現在認識している自車両位置を、ステップS8Bにて受信した情報に基づく補正後の自車両位置に置き換えるか否かを判定する。
【0050】
ここで、車載ナビゲーション装置10Bにおけるナビシステム演算部16は、例えばGPS信号を受信しているGPS衛星60が同一である場合等、自車両のGPS受信機11によって受信したGPS信号の受信状況情報と、情報配信センタ50から配信されたGPS信号の受信状況情報とが同様であり、且つ、補正後の自車両位置と現在認識している自車両位置との差異が例えば半径5mといった所定値を超える場合には、ステップS10Bにおいて、現在認識している自車両位置を補正後の自車両位置に置き換える。
【0051】
そして、車載ナビゲーション装置10Bにおけるナビシステム演算部16は、ステップS11Bにおいて、ルート案内演算部17により、案内ルートを決定するための各種演算を行い、出力部21を介して必要な情報を出力し、ステップS1Bからの処理を繰り返す。
【0052】
一方、情報配信セン50は、各車両からGPS信号の受信状況情報や車両位置情報、さらには交通情報等を、情報収集部51を介して適宜受信している。また、情報配信セン50は、ステップS21において、路上目標物を通過した車両に搭載されている車載ナビゲーション装置10AがステップS8Aにて送信した車両位置の補正に必要となる情報も受信する。
【0053】
続いて、情報配信セン50は、ステップS22において、他車両特定部52により、受信した情報を処理し、路上目標物を通過した車両の位置情報、当該車両から受信した補正に必要となる情報、及び、交通情報等を管理する。
【0054】
続いて、情報配信セン50は、ステップS23において、他車両特定部52により、例えば路上目標物を通過した車両の半径10km以内に存在する他車両等、当該車両の付近に存在する他車両を特定し、情報の配信先の候補車両として決定する。具体的には、情報配信セン50は、車載ナビゲーション装置10Aから受信した車両位置の補正に必要となる情報に基づいて、他車両の位置を推定し、その位置情報と、当該他車両から送信された当該他車両の位置情報とを比較し、その差異が例えば半径5mといった所定値を超える場合には、その他車両を情報を配信する候補車両として決定する。
【0055】
そして、情報配信セン50は、ステップS24において、他車両特定部52により、候補車両の付近の交通情報等の他、当該候補車両において車両位置の補正に必要となる情報を、配信データとして決定し、ステップS25において、情報送信部53を介して、配信データを候補車両に対して配信し、一連の処理を終了する。
【0056】
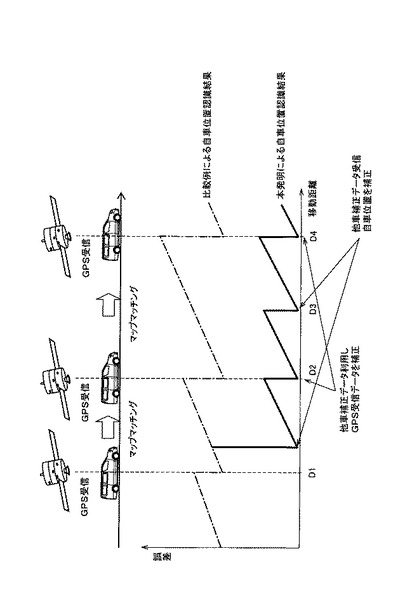
このように車両用ナビゲーションシステムは、車車間通信を利用して他車両を認識することができない状況や、自車両が特定の路上目標物を通過しない場合であっても、他車両から配信された情報に基づいて各車両の位置補正を行うことができる。このような車両用ナビゲーションシステムは、例えば図5に示すように、他車両から情報を受信する度に自車両位置を補正することにより、GPS信号を受信した際に他車両から受信した情報に基づいてGPS信号の補正のみを行う従来の技術による自車両補正方法を適用した場合に比べ、実際の位置との誤差を大幅に低減することができ、精度よく各車両の位置補正を行うことができる。
【0057】
また、車両用ナビゲーションシステムは、ある車両の付近に存在する複数の車両の位置を補正することができるため、付近に存在する複数の車両に対して車線単位でのルート案内が可能となり、車群制御を行うことができ、交通流の改善を図ることができる。特に、車両用ナビゲーションシステムは、既存のプローブやテレマティクスの機能を活用して構成されるので、特別な設備を要することなく簡易に実現することができる。さらに、車両用ナビゲーションシステムは、自車両のみで位置の補正を行うための特殊な条件が成立せずに位置の補正を行うことができない車両であっても、その位置を適宜補正することができるため、例えば任意の場所において車両を減速させるといった高精度な自車両位置が要求されるような車両走行制御システムにも適用することができる。さらにまた、車両用ナビゲーションシステムは、情報配信センタ50を利用することにより、任意の車両の位置を補正することができれば、その補正と略同時に他の多数の車両の位置も補正することができる。そのため、車両用ナビゲーションシステムは、位置の補正が行われる車両が自車両以外に多数発生していく場合には、それに応じて自車両の位置も逐次補正されていくため、さらなる補正精度の向上を図ることができる。
【0058】
[実施形態の効果]
以上詳細に説明したように、本発明の実施形態として示した車両用ナビゲーションシステムは、情報配信センタ50が、路上目標物の位置に基づいて車両位置を補正してその補正に使用した情報を送信してきた任意の車両の付近に存在する他車両であって位置補正が完了していない他車両を特定すると共に、当該任意の車両から送信されてきた路上目標物の位置情報と、当該他車両から送信されてきた当該他車両の位置情報との位置関係に基づいて、当該他車両の位置情報を推定し、当該他車両の車両位置の補正に必要となる情報として当該他車両に送信する。これにより、この車両用ナビゲーションシステムは、他車両に搭載されている車載ナビゲーション装置10が、情報配信センタ50から送信された情報に基づいて、車両位置を補正する。
【0059】
これにより、この車両用ナビゲーションシステムによれば、情報配信センタ50を経由して他車両から配信された情報に基づいて各車両の位置補正を行うことができるので、車車間通信を利用して他車両を認識することができない状況であっても、車両位置を精度よく補正することができる。
【0060】
また、この車両用ナビゲーションシステムは、情報配信センタ50が、任意の車両から受信した情報に基づいて、特定した他車両の位置を補正する演算を行って当該他車両の位置情報を推定すると、推定した位置情報と、当該他車両から送信されてきた当該他車両の位置情報との差異が所定範囲を超える場合に、推定した位置情報を含む情報を当該他車両に対して送信する。
【0061】
これにより、この車両用ナビゲーションシステムによれば、車両位置の補正が必要でない程度の場合には、情報配信センタ50から車載ナビゲーション装置10に対して情報を送信することがなくなり、情報配信センタ50と車載ナビゲーション装置10との間で不要に情報の授受を行って通信効率の悪化を招来するのを防止することができる。
【0062】
さらに、この車両用ナビゲーションシステムは、車載ナビゲーション装置10が、情報配信センタ50から送信された情報を分析し、その情報に基づいて補正した車両位置と、補正前の現在認識している車両位置とを逐次比較し、その比較結果に基づいて、現在認識している車両位置を補正後の車両位置に置き換える。
【0063】
これにより、この車両用ナビゲーションシステムによれば、車両位置の補正が必要でない程度の場合には、車載ナビゲーション装置10によって車両位置の補正演算を行う必要がなく、また、車両が移動体であることや、情報配信センタ50との間で行われる通信に関する時間的な差異等に起因して、情報配信センタ50によって推定された車両位置と実際の車両位置との間に生じる誤差の影響を回避することができる。
【0064】
なお、上述の実施の形態は本発明の一例である。このため、本発明は、上述の実施の形態に限定されることはなく、この実施の形態以外の形態であっても、本発明に係る技術的思想を逸脱しない範囲であれば、設計などに応じて種々の変更が可能であることは勿論である。
【図面の簡単な説明】
【0065】
【図1】本発明の実施形態として示す車両用ナビゲーションシステムの構成について示すブロック図である。
【図2】本発明の実施形態として示す車両用ナビゲーションシステムにおいて、車載ナビゲーション装置がGPS信号に基づいて自車両位置を算出すると共に、路上目標物に関する情報や情報配信センタから受信した情報に基づいて自車両位置を補正する様子を説明するための図である。
【図3】本発明の実施形態として示す車両用ナビゲーションシステムにおいて、情報配信センタが、自車両位置の補正が完了した車両の付近に存在する他車両であって位置補正が完了していない他車両を特定する様子を説明するための図である。
【図4】本発明の実施形態として示す車両用ナビゲーションシステムにおいて、各車両の位置補正を行う際の一連の手順を示すフローチャートである。
【図5】本発明の実施形態として示す車両用ナビゲーションシステムによる自車両位置の誤差と、従来技術を適用した場合における自車両位置の誤差とを比較した図である。
【符号の説明】
【0066】
10 車載ナビゲーション装置
11 GPS受信機
12 車両情報入力部
13 地図データベース
14 車載機情報入力部
15 操作入力部
16 ナビシステム演算部
17 ルート案内演算部
18 メモリ
19 画像処理部
20 通信部
21 出力部
30 路上目標物
50 情報配信センタ
51 情報収集部
52 他車両特定部
53 情報送信部
60 GPS衛星
【技術分野】
【0001】
本発明は、自車両のルート案内を行う車両用ナビゲーションシステム及び車両用ナビゲーション方法、並びに、これら車両用ナビゲーションシステム及び車両用ナビゲーション方法に用いられる情報配信サーバ及び車載ナビゲーション装置に関する。
【背景技術】
【0002】
従来、車車間通信を利用して他車両が認識している他車両位置を取得し、当該他車両位置と、自車両が認識している当該他車両との車両間の位置関係(相対距離)とに基づいて、自車両位置を補正する技術が提案されている(例えば、特許文献1参照。)。
【特許文献1】特開2007−178270号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、上述した特許文献1に記載された従来の技術においては、他車両自身が認識している他車両位置と、自車両で取得した他車両との間の相対距離とに基づいて自車両位置を補正している。したがって、自車両によって車間距離センサや外界認識カメラ等を用いて他車両との相対距離を正確に認識することができない状況では、自車両位置を精度よく補正することができない場合があった。
【0004】
そこで、本発明は、上述した実情に鑑みて提案されたものであり、車車間通信を利用して他車両を認識することができない状況であっても、自車両位置を精度よく補正することができる車両用ナビゲーションシステム及び車両用ナビゲーションシステムにおける位置情報の補正方法、並びに、情報配信サーバ及び車載ナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明は、上述の課題を解決するために、任意の車両から送信されてきた路上目標物の位置情報と、任意の車両の付近に存在する他車両から送信されてきた当該他車両の位置情報との位置関係に基づいて、当該他車両の位置情報を推定する。そして、推定された他車両の位置情報を含む情報に基づいて、当該他車両の車両位置を補正する。
【発明の効果】
【0006】
本発明によれば、任意の車両から取得した路上目標物の位置情報と、他車両から取得した当該他車両の位置情報との位置関係に基づいて、当該他車両の位置情報を推定して、他車両の車両位置を補正するので、車車間通信を利用して他車両を認識することができない状況であっても、自車両位置を精度よく補正することができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明を適用した車両用ナビゲーションシステムについて図面を参照して具体的に説明する。
【0008】
[車両用ナビゲーションシステムの構成]
本発明の実施形態として示す車両用ナビゲーションシステムは、プローブやテレマティクスと称される機能を利用するものである。具体的には、周期的に車両と情報配信センタとが交信し、車両が、自車両位置や旅行時間等の情報の他、作動状況等の情報を当該情報配信センタに提供すると共に、当該情報配信センタから周辺地域の交通情報や他車両の車載システムの作動状況から推定された路面状況情報等を取得する。これにより、車両では、取得した各種の情報に基づいて、案内中のルートを更新することができるものである。
【0009】
この車両用ナビゲーションシステムは、図1に示すように、自車両内に搭載される車載ナビゲーション装置10と、この車載ナビゲーション装置10に情報を配信する情報配信センタ50とを備える。
【0010】
車載ナビゲーション装置10は、GPS(Global Positioning System)衛星60からの信号を受信するGPS受信機11と、自車両の走行状態情報を入力する車両情報入力部12と、地図データを格納する地図データベース13と、自車両の各種車載機の情報を入力する車載機情報入力部14と、運転者が各種操作入力を行う操作入力部15と、自車両位置の算出を含む各種演算を行うナビシステム演算部16と、案内ルートを決定するための各種演算を行うルート案内演算部17と、各種情報を一時的に格納するメモリ18と、所定の画像処理を行う画像処理部19と、情報配信センタ50との間で情報の授受を行う通信部20と、運転者に提示する情報を出力する出力部21とを有する。
【0011】
GPS受信機11は、自車両位置の算出に用いるために、GPS衛星60から送信されたGPS信号を受信する。GPS受信機11は、受信したGPS信号をナビシステム演算部16に供給する。これによりナビシステム演算部16は、GPS信号を用いて自車位置を演算する。
【0012】
車両情報入力部12は、例えば、自車両の車速、操舵角、ヨーレート、加速度等、自車両の走行状態を示す走行状態情報を、図示しない各種センサから読み出して当該車載ナビゲーション装置10に入力する。車両情報入力部12は、入力した走行状態情報をナビシステム演算部16に供給する。
【0013】
地図データベース13は、例えばハードディスク、CD、MD、DVD、光ディスク、又は、FDD等、一般的な記憶媒体を用いて構成され、自車両のルート案内を行う際に用いる道路情報(リンク情報)を含む地図データを格納する。なお、この地図データベース13に格納されている地図データには、特定の路上目標物等の各種ノードが、その緯度及び経度等の位置情報に関連付けられて格納されている。この地図データベース13に格納された地図データは、ナビシステム演算部16によって読み出される。
【0014】
車載機情報入力部14は、例えば、路上に設置されたビーコン送信機から送信されたビーコン信号を受信するビーコン受信機、ETC(Electronic Toll Collection System)ゲートから送信されたゲート信号を受信するETC受信機、路面を撮像する路面カメラ、他車両を含む自車両周囲の外界を認識する外界認識センサ等を踏む。車載機情報入力部14は、自車両に搭載されている各種車載機によって得られた車載機情報を当該車載ナビゲーション装置10に入力する。車載機情報入力部14は、入力した車載機情報をナビシステム演算部16及び画像処理部19に供給する。
【0015】
操作入力部15は、スイッチやダイヤル機構等、運転者が各種操作入力を行うための操作子である。この操作入力部15を介して入力された操作情報は、ナビシステム演算部16に供給される。
【0016】
ナビシステム演算部16は、例えば、CPU(Central Processing Unit)、MPU(Micro Processing Unit)、DSP(Digital Signal Processor)、ASIC(Application Specific Integrated Circuit)、又は、FPGA(Field Programmable Gate Array)等を用いて実装される。ナビシステム演算部16は、GPS受信機11から供給されたGPS信号、車両情報入力部12から供給された走行状態情報、及び、地図データベース13から供給された地図データに基づいて、ナビゲーションを行うのに必要となる自車両位置の算出を含む各種演算を行う。
【0017】
また、ナビシステム演算部16は、自車両位置を補正するために、車載機情報入力部14から供給された車載機情報に基づいて、例えば、路上に設置されたビーコン送信機、ETCゲート、路上ペイント、路傍標識等、特定の路上目標物を自車両が通過した旨を検出する。ナビシステム演算部16は、自車両が特定の路上目標物を通過した旨を検出した場合には、例えば地図データベース13に格納されている当該路上目標物の緯度及び経度情報等、予め当該路上目標物と関連付けられている位置情報を読み出し、自車両位置の補正を行う。
【0018】
さらに、ナビシステム演算部16は、各種の情報を通信部20に供給し、情報配信センタ50に送信させる。例えば、GPS信号を受信しているGPS衛星60の個数や衛星名、受信時刻等、GPS信号の受信状況を示す受信状況情報や、GPS信号に基づいて算出した自車両位置情報や、地図データベース13から読み出した地図データと車両情報入力部12から供給された走行状態情報とに基づくマップマッチング等によって算出した自車両位置情報や、現在時刻情報や、補正した自車両位置情報や、自車両の走行状態情報や、交通情報、旅行時間情報、天候情報、車載機情報等を通信部20から情報配信センタ50に送信させる。
【0019】
特に、ナビシステム演算部16は、特定の路上目標物等に基づいて自車両位置の補正を完了した場合には、補正の際に算出しているGPS信号に基づく自車両位置情報と、補正に使用した路上目標物の位置等の情報との差異や、補正の際に算出しているマップマッチング等による自車両位置情報と、補正に使用した情報との差異等を示す情報を、通信部20を介して情報配信センタ50に送信させる。
【0020】
さらにまた、ナビシステム演算部16は、通信部20を介して、自車両位置の補正に必要となる情報若しくは情報配信センタ50によって推定された補正後の自車両位置情報や、自車両付近の交通情報、天候情報、路面状況情報等を情報配信センタ50から受信し、他の情報と共に、ルート案内演算部17に供給する。
【0021】
ルート案内演算部17は、例えば、CPU、MPU、DSP、ASIC、又は、FPGA等を用いて実装される。ルート案内演算部17は、ナビシステム演算部16から供給された各種情報に基づいて、案内ルートを決定するための各種演算を行う。ルート案内演算部17は、決定した案内ルート情報を出力部21に供給する。
【0022】
メモリ18は、情報配信センタ50に送信される各種情報を一時的に格納する。このメモリ18に格納された情報は、ルート案内演算部17を介してナビシステム演算部16によって適宜読み出され、情報配信センタ50に送信される。また、このメモリ18に格納された情報のうち、自車両位置の補正に使用された情報は、その補正が完了した場合に読み出され、情報配信センタ50に送信される。
【0023】
画像処理部19は、車載機情報入力部14から供給された車載機情報のうち、路面カメラや外界認識センサ等から得られた情報に対して所定の画像処理を行い、得られた画像情報を出力部21に供給する。
【0024】
通信部20は、例えば、DCM(Data communication module)等から構成され、携帯電話通信網や所定の無線通信網若しくは地上波データ放送や衛星放送等の放送網を介して、外部の情報配信センタ50との間で通信を行う。具体的には、通信部20は、ナビシステム演算部16から供給されたGPS信号の受信状況情報や、自車両位置情報、現在時刻情報、自車両位置の補正に使用した情報、自車両の走行状態情報、交通情報、旅行時間情報、天候情報、車載機情報等を情報配信センタ50に送信する。また、通信部20は、情報配信センタ50から送信された自車両位置の補正に必要となる情報若しくは情報配信センタ50によって算出された補正後の自車両位置情報や、自車両付近の交通情報、天候情報、路面状況情報等を受信し、ナビシステム演算部16に供給する。
【0025】
出力部21は、例えば液晶ディスプレイ等の表示装置やスピーカ等の音声出力装置等から構成され、ルート案内演算部17から供給された案内ルート情報や画像処理部19から供給された画像情報を、運転者が認識可能な形態で出力する。
【0026】
このような車載ナビゲーション装置10は、例えば図2に示すように、GPS衛星60から受信したGPS信号に基づいて自車両位置を算出すると共に、緯度及び経度が特定されている路上目標物30に関する情報や情報配信センタ50から受信した情報に基づいて、自車両位置を補正する。
【0027】
一方、情報配信センタ50は、その情報配信サーバの機能として、各車両から情報を収集する情報収集部51と、任意の車両の付近に存在する他車両の位置を特定する他車両特定部52と、車載ナビゲーション装置10に情報を送信する情報送信部53とを有する。
【0028】
情報収集部51は、携帯電話通信網や所定の無線通信網若しくは地上波データ放送や衛星放送等の放送網を介して、各車両から送信された当該車両の位置情報を含む各種情報を収集する。具体的には、情報収集部51は、各車両に搭載されている車載ナビゲーション装置10における通信部20から送信された情報を受信し、各車両の位置情報を含むプローブデータを収集する。情報収集部51は、収集した情報を図示しないプローブデータ格納部に蓄積したり、他車両特定部52に供給したりする。
【0029】
他車両特定部52は、CPU、MPU、DSP、ASIC、又は、FPGA等を用いて実装され、情報収集部51から供給された情報に基づいて、各車両の付近に存在する他車両であって位置補正が完了していない他車両を特定する。具体的には、他車両特定部52は、路上目標物の位置に基づいて車両位置を補正してその補正に使用した情報を送信してきた任意の車両の付近に存在する他車両を特定し、当該任意の車両から送信されてきた路上目標物の緯度及び経度からなる位置情報と、当該他車両から送信されてきた当該他車両の緯度及び経度からなる位置情報との位置関係に基づいて、当該他車両の絶対座標位置からなる位置情報を推定する。他車両特定部52は、各車両について特定した他車両の位置情報を含む各種情報を、情報送信部53を介して各車両の車載ナビゲーション装置10に対して送信させる。
【0030】
情報送信部53は、他車両特定部52から供給された位置情報を含む車両位置の補正に必要となる情報若しくは情報配信センタ50によって推定された補正後の車両位置情報やその推定時刻情報、自車両付近の交通情報、天候情報、路面状況情報等を、各車両の車載ナビゲーション装置10に送信する。より具体的には、情報送信部53は、車両位置の補正に必要となる情報として、車両位置の補正が完了した他車両におけるGPS信号の受信状況情報や、車両位置の補正が完了した他車両における、補正の際に算出しているGPS信号に基づく自車両位置情報と、補正に使用した路上目標物の位置等の情報との差異や、車両位置の補正が完了した他車両における、補正の際に算出しているマップマッチング等による自車両位置情報と、補正に使用した情報との差異等を示す情報を、各車両の車載ナビゲーション装置10に送信する。
【0031】
このような情報配信センタ50は、情報収集部51によって各車両のGPS信号の受信状況情報、各車両の位置情報、各車両の走行状態情報、及び、各車両が保有している交通情報等を収集して管理することにより、地域毎の交通状況等を把握し、適宜情報配信先を決定して各車両に必要となる情報を配信する。
【0032】
[車両用ナビゲーションシステムの動作]
このような車載ナビゲーション装置10と情報配信センタ50とを備える車両用ナビゲーションシステムにおいて、情報配信センタ50は、例えば図3に示すように、自車両位置の補正が完了した少なくとも1台の車両C1から補正に使用した情報を情報収集部51によって受信したとする。この場合に、情報配信センタ50の他車両特定部52は、その補正が完了した車両C1の付近に存在する他車両であって位置補正が完了していない他車両C2,C3,C4を特定し、情報の配信先の候補車両として決定する。
【0033】
情報配信センタ50は、他車両特定部52により、補正が完了した車両C1から受信している補正に使用した情報に基づいて、各候補車両C2,C3,C4の位置を補正する演算を行い、適宜把握している当該候補車両C2,C3,C4の位置との比較を行う。そして、情報配信センタ50は、補正して求めた候補車両C2,C3,C4の位置と、適宜把握している当該候補車両C2,C3,C4の位置との差異が所定範囲を超えているかを判断する。判断の結果、位置の差異が所定範囲を超えている候補車両C2,C3,C4がある場合には、情報送信部53を介して、当該候補車両C2,C3,C4に対して、その位置の補正に必要となる情報や、他車両特定部52によって算出された補正後の候補車両C2,C3,C4についての車両位置情報等を配信する。
【0034】
これに応じて、位置の補正に必要となる情報を受信し且つ位置補正を完了していない他車両C2,C3,C4は、受信した補正に必要となる情報に含まれる各種情報を分析する。すなわち、車両が移動体であることや情報配信センタ50との間で行われる通信に関する時間的な差異等に起因して、情報配信センタ50によって推定された候補車両C2,C3,C4の位置と、これら候補車両C2,C3,C4の実際の位置との間には誤差がある。そのため、候補車両C2,C3,C4は、受信した情報を分析し、その情報に基づいて補正した自車両位置と、補正前の現在認識している自車両位置とを逐次比較する。そして、補正後の自車両位置と現在認識している自車両位置との差異が所定範囲を超えている場合には、現在認識している自車両位置を、補正後の自車両位置に置き換える。
【0035】
ここで、車両用ナビゲーションシステムは、自車両位置の補正に必要となる路上目標物を複数重複なく指定することにより、車両C1のように自車両位置の補正が完了する車両が逐次発生することになる。情報配信センタ50は、当該車両から情報を逐次受信し、他車両C2,C3,C4のように位置補正が完了していない他車両へ逐次配信することになる。これに応じて、位置補正が完了していない他車両は、位置補正に必要となる情報が逐次配信されるので、その位置補正を逐次行うことになる。
【0036】
具体的には、車両用ナビゲーションシステムにおいては、図4に示すような一連の手順にしたがって、各車両の位置補正を行う。なお、ここでは、自車両位置の補正を完了して情報配信センタ50に対して情報を送信する車両に搭載されている車載ナビゲーション装置10を「車載ナビゲーション装置10A」と称すると共に、当該車両の付近に存在する他車両であって位置補正を完了していない情報受信側の他車両に搭載されている車載ナビゲーション装置10を「車載ナビゲーション装置10B」と称するものとする。
【0037】
まず、車載ナビゲーション装置10Aにおけるナビシステム演算部16は、図4に示すように、通常時は、ステップS1Aにおいて、運転者による操作入力部15を介した操作内容を読み出し、ステップS2Aにおいて、読み出した操作内容に応じた設定条件を判別し、当該車載ナビゲーション装置10Aの処理を決定する。
【0038】
続いて、車載ナビゲーション装置10Aにおけるナビシステム演算部16は、ステップS3Aにおいて、GPS受信機11によって受信したGPS信号を取得し、ステップS4Aにおいて、地図データベース13から読み出した地図データと、車両情報入力部12から取得した走行状態情報とに基づいて、マップマッチング等を行い、自車両位置を算出する。このとき、ナビシステム演算部16は、算出した自車両位置情報と共に、自車両が走行した経路や、そのときの交通情報及び路面状況情報等もメモリ18に格納する。
【0039】
また、車載ナビゲーション装置10Aにおけるナビシステム演算部16は、ステップS5Aにおいて、車載機情報入力部14から車載機情報を適宜取得し、ステップS6Aにおいて、自車両が特定の路上目標物を通過したか否かを判定する。
【0040】
ここで、車載ナビゲーション装置10Aは、自車両が特定の路上目標物を通過していない場合には、ステップS8Aへと処理を移行する一方で、自車両が特定の路上目標物を通過した場合には、ステップS7Aにおいて、ナビシステム演算部16によって自車両位置の補正値を算出する。ここでは、車載ナビゲーション装置10Aは、自車両位置の補正を完了する車両に搭載されているので、ステップS7Aへと処理を移行することになる。
【0041】
例えば、車載ナビゲーション装置10Aは、ステップS7Aにおいて、路上目標物が光ビーコン送信機である場合には、自車両が光ビーコン送信機を通過した際に受信した当該光ビーコン送信機のビーコン番号を車載機情報入力部14によって入力する。そして、車載ナビゲーション装置10Aは、予めビーコン番号とその緯度及び経度とを関連付けた情報を地図データベース13に格納しておき、自車両が光ビーコン送信機を通過した際に、地図データベース13からビーコン番号に関連付けられている緯度及び経度情報をナビシステム演算部16によって読み出し、自車両位置の補正値を算出する。
【0042】
なお、車両用ナビゲーションシステムは、光ビーコン送信機等の特定の路上目標物の緯度及び経度情報を情報配信センタ50に記憶させておき、自車両が光ビーコン送信機を通過した際に、その旨を情報配信センタ50に通知することにより、情報配信センタ50によって位置補正を行うようにしてもよい。車載ナビゲーション装置10Aにおけるナビシステム演算部16は、自車両位置の補正値を算出すると、GPS信号の受信状況情報や補正前の自車両位置情報等と共に、車両位置の補正に必要となる情報としてメモリ18に格納する。
【0043】
そして、車載ナビゲーション装置10Aは、ステップS8Aにおいて、交通情報等を含め、メモリ18に格納されている情報を、車両位置の補正に必要となる情報として、通信部20を介して情報配信センタ50に送信する。
【0044】
その後、車載ナビゲーション装置10Aは、ステップS9Aにおいて、現在認識している自車両位置を、ステップS7Aにて算出した補正値に基づく補正後の自車両位置に置き換えるか否かを判定し、置き換える場合には、ステップS10Aにおいて、補正後の自車両位置に置き換えた後、ステップS11Aにおいて、ルート案内演算部17により、案内ルートを決定するための各種演算を行い、出力部21を介して必要な情報を出力し、ステップS1Aからの処理を繰り返すことになる。
【0045】
また、情報受信側である車載ナビゲーション装置10Bも、車載ナビゲーション装置10Aと同様の処理を行う。
【0046】
すなわち、車載ナビゲーション装置10Bにおけるナビシステム演算部16は、通常時は、ステップS1Bにおいて、運転者による操作入力部15を介した操作内容を読み出し、ステップS2Bにおいて、読み出した操作内容に応じた設定条件を判別し、当該車載ナビゲーション装置10Bの処理を決定すると、ステップS3Bにおいて、GPS受信機11によって受信したGPS信号を取得し、ステップS4Bにおいて、自車両位置を算出する。
【0047】
続いて、車載ナビゲーション装置10Bにおけるナビシステム演算部16は、ステップS5Bにおいて、車載機情報入力部14から車載機情報を適宜取得し、ステップS6Bにおいて、自車両が特定の路上目標物を通過したか否かを判定する。
【0048】
ここでは、車載ナビゲーション装置10Bは、自車両位置の補正を完了していない車両に搭載されているので、ステップS8Bへと処理を移行することになる。車載ナビゲーション装置10Bは、自車両が特定の路上目標物を通過していない場合、すなわち、GPS信号以外の情報に基づいて自車両位置を補正することができない場合には、ステップS8Bにおいて、交通情報等を含め、メモリ18に格納されている情報を、通信部20を介して情報配信センタ50に対して送信すると共に、交通情報等と共に自車両位置の補正に必要となる情報を、通信部20を介して情報配信センタ50から受信し、メモリ18に格納する。
【0049】
続いて、車載ナビゲーション装置10Bにおけるナビシステム演算部16は、ステップS9Bにおいて、自車両位置の補正に必要となる情報をメモリ18から読み出し、自車両のGPS受信機11によって受信したGPS信号の受信状況情報と、情報配信センタ50から配信されたGPS信号の受信状況情報とを比較すると共に、情報配信センタ50から配信された情報に基づく位置補正演算によって得られた補正後の自車両位置と、現在自車両が認識している自車両位置とを比較し、現在認識している自車両位置を、ステップS8Bにて受信した情報に基づく補正後の自車両位置に置き換えるか否かを判定する。
【0050】
ここで、車載ナビゲーション装置10Bにおけるナビシステム演算部16は、例えばGPS信号を受信しているGPS衛星60が同一である場合等、自車両のGPS受信機11によって受信したGPS信号の受信状況情報と、情報配信センタ50から配信されたGPS信号の受信状況情報とが同様であり、且つ、補正後の自車両位置と現在認識している自車両位置との差異が例えば半径5mといった所定値を超える場合には、ステップS10Bにおいて、現在認識している自車両位置を補正後の自車両位置に置き換える。
【0051】
そして、車載ナビゲーション装置10Bにおけるナビシステム演算部16は、ステップS11Bにおいて、ルート案内演算部17により、案内ルートを決定するための各種演算を行い、出力部21を介して必要な情報を出力し、ステップS1Bからの処理を繰り返す。
【0052】
一方、情報配信セン50は、各車両からGPS信号の受信状況情報や車両位置情報、さらには交通情報等を、情報収集部51を介して適宜受信している。また、情報配信セン50は、ステップS21において、路上目標物を通過した車両に搭載されている車載ナビゲーション装置10AがステップS8Aにて送信した車両位置の補正に必要となる情報も受信する。
【0053】
続いて、情報配信セン50は、ステップS22において、他車両特定部52により、受信した情報を処理し、路上目標物を通過した車両の位置情報、当該車両から受信した補正に必要となる情報、及び、交通情報等を管理する。
【0054】
続いて、情報配信セン50は、ステップS23において、他車両特定部52により、例えば路上目標物を通過した車両の半径10km以内に存在する他車両等、当該車両の付近に存在する他車両を特定し、情報の配信先の候補車両として決定する。具体的には、情報配信セン50は、車載ナビゲーション装置10Aから受信した車両位置の補正に必要となる情報に基づいて、他車両の位置を推定し、その位置情報と、当該他車両から送信された当該他車両の位置情報とを比較し、その差異が例えば半径5mといった所定値を超える場合には、その他車両を情報を配信する候補車両として決定する。
【0055】
そして、情報配信セン50は、ステップS24において、他車両特定部52により、候補車両の付近の交通情報等の他、当該候補車両において車両位置の補正に必要となる情報を、配信データとして決定し、ステップS25において、情報送信部53を介して、配信データを候補車両に対して配信し、一連の処理を終了する。
【0056】
このように車両用ナビゲーションシステムは、車車間通信を利用して他車両を認識することができない状況や、自車両が特定の路上目標物を通過しない場合であっても、他車両から配信された情報に基づいて各車両の位置補正を行うことができる。このような車両用ナビゲーションシステムは、例えば図5に示すように、他車両から情報を受信する度に自車両位置を補正することにより、GPS信号を受信した際に他車両から受信した情報に基づいてGPS信号の補正のみを行う従来の技術による自車両補正方法を適用した場合に比べ、実際の位置との誤差を大幅に低減することができ、精度よく各車両の位置補正を行うことができる。
【0057】
また、車両用ナビゲーションシステムは、ある車両の付近に存在する複数の車両の位置を補正することができるため、付近に存在する複数の車両に対して車線単位でのルート案内が可能となり、車群制御を行うことができ、交通流の改善を図ることができる。特に、車両用ナビゲーションシステムは、既存のプローブやテレマティクスの機能を活用して構成されるので、特別な設備を要することなく簡易に実現することができる。さらに、車両用ナビゲーションシステムは、自車両のみで位置の補正を行うための特殊な条件が成立せずに位置の補正を行うことができない車両であっても、その位置を適宜補正することができるため、例えば任意の場所において車両を減速させるといった高精度な自車両位置が要求されるような車両走行制御システムにも適用することができる。さらにまた、車両用ナビゲーションシステムは、情報配信センタ50を利用することにより、任意の車両の位置を補正することができれば、その補正と略同時に他の多数の車両の位置も補正することができる。そのため、車両用ナビゲーションシステムは、位置の補正が行われる車両が自車両以外に多数発生していく場合には、それに応じて自車両の位置も逐次補正されていくため、さらなる補正精度の向上を図ることができる。
【0058】
[実施形態の効果]
以上詳細に説明したように、本発明の実施形態として示した車両用ナビゲーションシステムは、情報配信センタ50が、路上目標物の位置に基づいて車両位置を補正してその補正に使用した情報を送信してきた任意の車両の付近に存在する他車両であって位置補正が完了していない他車両を特定すると共に、当該任意の車両から送信されてきた路上目標物の位置情報と、当該他車両から送信されてきた当該他車両の位置情報との位置関係に基づいて、当該他車両の位置情報を推定し、当該他車両の車両位置の補正に必要となる情報として当該他車両に送信する。これにより、この車両用ナビゲーションシステムは、他車両に搭載されている車載ナビゲーション装置10が、情報配信センタ50から送信された情報に基づいて、車両位置を補正する。
【0059】
これにより、この車両用ナビゲーションシステムによれば、情報配信センタ50を経由して他車両から配信された情報に基づいて各車両の位置補正を行うことができるので、車車間通信を利用して他車両を認識することができない状況であっても、車両位置を精度よく補正することができる。
【0060】
また、この車両用ナビゲーションシステムは、情報配信センタ50が、任意の車両から受信した情報に基づいて、特定した他車両の位置を補正する演算を行って当該他車両の位置情報を推定すると、推定した位置情報と、当該他車両から送信されてきた当該他車両の位置情報との差異が所定範囲を超える場合に、推定した位置情報を含む情報を当該他車両に対して送信する。
【0061】
これにより、この車両用ナビゲーションシステムによれば、車両位置の補正が必要でない程度の場合には、情報配信センタ50から車載ナビゲーション装置10に対して情報を送信することがなくなり、情報配信センタ50と車載ナビゲーション装置10との間で不要に情報の授受を行って通信効率の悪化を招来するのを防止することができる。
【0062】
さらに、この車両用ナビゲーションシステムは、車載ナビゲーション装置10が、情報配信センタ50から送信された情報を分析し、その情報に基づいて補正した車両位置と、補正前の現在認識している車両位置とを逐次比較し、その比較結果に基づいて、現在認識している車両位置を補正後の車両位置に置き換える。
【0063】
これにより、この車両用ナビゲーションシステムによれば、車両位置の補正が必要でない程度の場合には、車載ナビゲーション装置10によって車両位置の補正演算を行う必要がなく、また、車両が移動体であることや、情報配信センタ50との間で行われる通信に関する時間的な差異等に起因して、情報配信センタ50によって推定された車両位置と実際の車両位置との間に生じる誤差の影響を回避することができる。
【0064】
なお、上述の実施の形態は本発明の一例である。このため、本発明は、上述の実施の形態に限定されることはなく、この実施の形態以外の形態であっても、本発明に係る技術的思想を逸脱しない範囲であれば、設計などに応じて種々の変更が可能であることは勿論である。
【図面の簡単な説明】
【0065】
【図1】本発明の実施形態として示す車両用ナビゲーションシステムの構成について示すブロック図である。
【図2】本発明の実施形態として示す車両用ナビゲーションシステムにおいて、車載ナビゲーション装置がGPS信号に基づいて自車両位置を算出すると共に、路上目標物に関する情報や情報配信センタから受信した情報に基づいて自車両位置を補正する様子を説明するための図である。
【図3】本発明の実施形態として示す車両用ナビゲーションシステムにおいて、情報配信センタが、自車両位置の補正が完了した車両の付近に存在する他車両であって位置補正が完了していない他車両を特定する様子を説明するための図である。
【図4】本発明の実施形態として示す車両用ナビゲーションシステムにおいて、各車両の位置補正を行う際の一連の手順を示すフローチャートである。
【図5】本発明の実施形態として示す車両用ナビゲーションシステムによる自車両位置の誤差と、従来技術を適用した場合における自車両位置の誤差とを比較した図である。
【符号の説明】
【0066】
10 車載ナビゲーション装置
11 GPS受信機
12 車両情報入力部
13 地図データベース
14 車載機情報入力部
15 操作入力部
16 ナビシステム演算部
17 ルート案内演算部
18 メモリ
19 画像処理部
20 通信部
21 出力部
30 路上目標物
50 情報配信センタ
51 情報収集部
52 他車両特定部
53 情報送信部
60 GPS衛星
【特許請求の範囲】
【請求項1】
車両内に搭載される車載ナビゲーション装置と、
前記車載ナビゲーション装置に情報を配信する情報配信サーバとを備え、
前記情報配信サーバは、
路上目標物の位置に基づいて車両位置を補正してその補正に使用した情報を送信してきた任意の車両の付近に存在する他車両であって位置補正が完了していない他車両を特定し、当該任意の車両から送信されてきた前記路上目標物の位置情報と、当該他車両から送信されてきた当該他車両の位置情報との位置関係に基づいて、当該他車両の位置情報を推定する他車両特定手段と、
前記他車両特定手段によって推定された前記他車両の位置情報を含む情報を、当該他車両の車両位置の補正に必要となる情報として当該他車両に送信する情報送信手段とを有し、
前記他車両に搭載されている前記車載ナビゲーション装置は、前記情報配信サーバから送信された情報に基づいて、車両位置を補正する補正手段を有すること
を特徴とする車両用ナビゲーションシステム。
【請求項2】
前記他車両特定手段は、前記任意の車両から受信した情報に基づいて、特定した前記他車両の位置を補正する演算を行って当該他車両の位置情報を推定し、推定した位置情報と、当該他車両から送信されてきた当該他車両の位置情報との差異が所定範囲を超える場合には、推定した位置情報を含む情報を、前記情報送信手段を介して当該他車両に送信させることを特徴とする請求項1に記載の車両用ナビゲーションシステム。
【請求項3】
前記補正手段は、前記情報配信サーバから送信された情報を分析し、その情報に基づいて補正した車両位置と、補正前の現在認識している車両位置とを逐次比較し、その比較結果に基づいて、前記現在認識している車両位置を、前記補正後の車両位置に置き換えることを特徴とする請求項1又は請求項2に記載の車両用ナビゲーションシステム。
【請求項4】
任意の車両から送信されてきた路上目標物の位置情報と、前記任意の車両の付近に存在する他車両から送信されてきた当該他車両の位置情報との位置関係に基づいて、当該他車両の位置情報を推定し、推定された前記他車両の位置情報を含む情報に基づいて、当該他車両の車両位置を補正することを特徴とする車両用ナビゲーションシステムにおける位置情報の補正方法。
【請求項5】
車載ナビゲーション装置に情報を配信する情報配信サーバにおいて、
路上目標物の位置に基づいて車両位置を補正してその補正に使用した情報を送信してきた任意の車両の付近に存在する他車両であって位置補正が完了していない他車両を特定し、当該任意の車両から送信されてきた前記路上目標物の位置情報と、当該他車両から送信されてきた当該他車両の位置情報との位置関係に基づいて、当該他車両の位置情報を推定する他車両特定手段と、
前記他車両特定手段によって推定された前記他車両の位置情報を含む情報を、当該他車両の車両位置の補正に必要となる情報として当該他車両に送信する情報送信手段と
を備えることを特徴とする情報配信サーバ。
【請求項6】
車両内に搭載される車載ナビゲーション装置において、
路上目標物の位置に基づいて車両位置を補正し、その補正に使用した情報を自車両位置情報と共に外部の情報配信サーバに送信する送信手段と、
任意の車両から送信された路上目標物の位置情報と、前記送信手段によって送信した自車両位置情報との位置関係に基づいて、前記情報配信サーバによって推定された自車両位置情報を含む情報を、路上目標物の位置に基づく位置補正が完了していない場合に受信する受信手段と、
前記受信手段によって前記情報配信サーバから受信した情報に基づいて、車両位置を補正する補正手段と
を備えることを特徴とする車載ナビゲーション装置。
【請求項1】
車両内に搭載される車載ナビゲーション装置と、
前記車載ナビゲーション装置に情報を配信する情報配信サーバとを備え、
前記情報配信サーバは、
路上目標物の位置に基づいて車両位置を補正してその補正に使用した情報を送信してきた任意の車両の付近に存在する他車両であって位置補正が完了していない他車両を特定し、当該任意の車両から送信されてきた前記路上目標物の位置情報と、当該他車両から送信されてきた当該他車両の位置情報との位置関係に基づいて、当該他車両の位置情報を推定する他車両特定手段と、
前記他車両特定手段によって推定された前記他車両の位置情報を含む情報を、当該他車両の車両位置の補正に必要となる情報として当該他車両に送信する情報送信手段とを有し、
前記他車両に搭載されている前記車載ナビゲーション装置は、前記情報配信サーバから送信された情報に基づいて、車両位置を補正する補正手段を有すること
を特徴とする車両用ナビゲーションシステム。
【請求項2】
前記他車両特定手段は、前記任意の車両から受信した情報に基づいて、特定した前記他車両の位置を補正する演算を行って当該他車両の位置情報を推定し、推定した位置情報と、当該他車両から送信されてきた当該他車両の位置情報との差異が所定範囲を超える場合には、推定した位置情報を含む情報を、前記情報送信手段を介して当該他車両に送信させることを特徴とする請求項1に記載の車両用ナビゲーションシステム。
【請求項3】
前記補正手段は、前記情報配信サーバから送信された情報を分析し、その情報に基づいて補正した車両位置と、補正前の現在認識している車両位置とを逐次比較し、その比較結果に基づいて、前記現在認識している車両位置を、前記補正後の車両位置に置き換えることを特徴とする請求項1又は請求項2に記載の車両用ナビゲーションシステム。
【請求項4】
任意の車両から送信されてきた路上目標物の位置情報と、前記任意の車両の付近に存在する他車両から送信されてきた当該他車両の位置情報との位置関係に基づいて、当該他車両の位置情報を推定し、推定された前記他車両の位置情報を含む情報に基づいて、当該他車両の車両位置を補正することを特徴とする車両用ナビゲーションシステムにおける位置情報の補正方法。
【請求項5】
車載ナビゲーション装置に情報を配信する情報配信サーバにおいて、
路上目標物の位置に基づいて車両位置を補正してその補正に使用した情報を送信してきた任意の車両の付近に存在する他車両であって位置補正が完了していない他車両を特定し、当該任意の車両から送信されてきた前記路上目標物の位置情報と、当該他車両から送信されてきた当該他車両の位置情報との位置関係に基づいて、当該他車両の位置情報を推定する他車両特定手段と、
前記他車両特定手段によって推定された前記他車両の位置情報を含む情報を、当該他車両の車両位置の補正に必要となる情報として当該他車両に送信する情報送信手段と
を備えることを特徴とする情報配信サーバ。
【請求項6】
車両内に搭載される車載ナビゲーション装置において、
路上目標物の位置に基づいて車両位置を補正し、その補正に使用した情報を自車両位置情報と共に外部の情報配信サーバに送信する送信手段と、
任意の車両から送信された路上目標物の位置情報と、前記送信手段によって送信した自車両位置情報との位置関係に基づいて、前記情報配信サーバによって推定された自車両位置情報を含む情報を、路上目標物の位置に基づく位置補正が完了していない場合に受信する受信手段と、
前記受信手段によって前記情報配信サーバから受信した情報に基づいて、車両位置を補正する補正手段と
を備えることを特徴とする車載ナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−19588(P2010−19588A)
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願番号】特願2008−178061(P2008−178061)
【出願日】平成20年7月8日(2008.7.8)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願日】平成20年7月8日(2008.7.8)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]