
車両用ナビゲーション装置およびコストパラメータチューニング方法
【課題】ユーザが現状のナビゲーションルートに不満がある場合に、ユーザ走行ルートを記憶することで、コストパラメータをより満足度の高い方向に変更する。
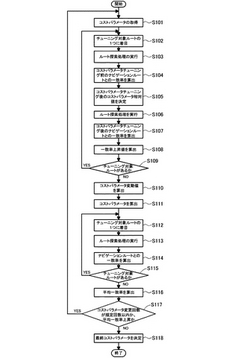
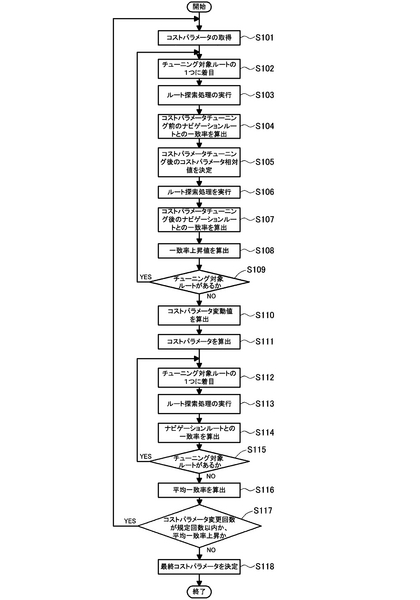
【解決手段】チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出し(ステップS104)、チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出し(ステップS107)、一致率の上昇値として算出する(ステップS108)ことを繰り返し(ステップS109)、コストパラメータ変動値を算出し(ステップS110)、コストパラメータチューニング後のコストパラメータを算出し(ステップS111)、平均一致率を算出する(ステップS116)ことを繰り返し(ステップS117)、コストパラメータ変更回数が規定回数より大きくなるか、または平均一致率が上昇でなくなれば、その時点でのコストパラメータを最終的なコストパラメータとして決定する(ステップS118)。
【解決手段】チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出し(ステップS104)、チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出し(ステップS107)、一致率の上昇値として算出する(ステップS108)ことを繰り返し(ステップS109)、コストパラメータ変動値を算出し(ステップS110)、コストパラメータチューニング後のコストパラメータを算出し(ステップS111)、平均一致率を算出する(ステップS116)ことを繰り返し(ステップS117)、コストパラメータ変更回数が規定回数より大きくなるか、または平均一致率が上昇でなくなれば、その時点でのコストパラメータを最終的なコストパラメータとして決定する(ステップS118)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は車両用ナビゲーション装置およびコストパラメータチューニング方法に関し、特に出発地から目的地までのルートを探索してユーザ(運転者等)に提示する車両用ナビゲーション装置およびコストパラメータチューニング方法に関する。
【背景技術】
【0002】
従来から、出発地から目的地までのルートを探索し、地図データに基づいて表示画面に表示した道路地図上に、車両の現在地および探索したルートを表示するようにした車両用ナビゲーション装置はよく知られている。この場合、地図データは、道路地図上の2点を結ぶリンクをそれぞれ表す複数のリンクデータおよび前記各リンクに対応してルート探索に利用される複数のルート探索用データ(例えば、リンク長,道路幅係数,道路種別係数,渋滞係数など)からなり、前記ルートの探索においては、出発地から目的地までを複数のリンクで接続した複数組のルートを想定し、同想定した各ルートごとに出発地から目的地までの複数のリンクに対応した各ルート探索用データを累算してルートのコストをそれぞれ計算し、ルートのコストが最小になるルートが運転者に提示されるようにしている。
【0003】
車両用ナビゲーション装置が案内するルートに対して、ユーザが異なったルートを走行した場合に、その差分を記憶し、次のルート探索では同じルートが探索されるようになるルート学習機能が知られている(例えば、特許文献1参照)。
【特許文献1】特開2004−45054号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上述した従来技術は、ルート学習においてユーザ走行ルートとナビゲーションルートとの差分を記憶しておき、ルート探索後にその差分を反映するという機能であるが、ユーザが走行していない道路に対してはまったく反映されないという問題点があった。
【0005】
本発明の第1の課題は、上述のような事情を背景になされたものであって、現状のナビゲーションルートに不満がある場合に、ユーザがチューニング対象ルートに任意のユーザ走行ルートを追加することでコストパラメータをより満足度の高い方向に変更することができるようにした車両用ナビゲーション装置を提供することにある。
【0006】
本発明の第2の課題は、現状のナビゲーションルートに不満がある場合に、ユーザがチューニング対象ルートに任意のユーザ走行ルートを追加することでコストパラメータをより満足度の高い方向に変更することができるコストパラメータチューニング方法を提供することにある。
【課題を解決するための手段および発明の効果】
【0007】
請求項1記載の車両用ナビゲーション装置は、チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出するチューニング前一致率算出手段と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出するチューニング後一致率算出手段と、前記一致率の差から一致率上昇値を算出する一致率上昇値算出手段と、前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとを比較してコストパラメータ相対値を決定するコストパラメータ相対値決定手段と、前記コストパラメータ相対値および前記一致率上昇値を用いてコストパラメータ変動値を算出するコストパラメータ変動値算出手段と、コストパラメータチューニング前のコストパラメータに対して前記コストパラメータ変動値を加算してコストパラメータチューニング後のコストパラメータを算出するチューニング後コストパラメータ算出手段と、コストパラメータチューニング後の平均一致率を算出する平均一致率算出手段と、前記平均一致率が上昇しなくなったときに、その時点でのコストパラメータチューニング後のコストパラメータを最終的なコストパラメータとして決定するコストパラメータ決定手段とを有することを特徴とする。請求項1記載の車両用ナビゲーション装置によれば、チューニング対象ルートとそのコストパラメータチューニング前後のナビゲーションルートとの一致率の差に基づいてコストパラメータの変動値を算出し、コストパラメータを修正(パラメータチューニング)することで全体的なナビゲーションルートの質を向上させることができる。
【0008】
請求項2記載の車両用ナビゲーション装置は、チューニング対象ルートと同じ出発地および目的地を設定して、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータでルート探索処理を実行するチューニング前ルート探索処理実行手段と、前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出するチューニング前一致率算出手段と、前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとを比較して高速道コストパラメータ相対値,有料道コストパラメータ相対値および一般道コストパラメータ相対値を決定するコストパラメータ相対値決定手段と、前記チューニング対象ルートと同じ出発地および目的地を設定して、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータに対して高速道コストパラメータ相対値,有料道コストパラメータ相対値および一般道コストパラメータ相対値を加算したコストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータでルート探索処理を実行するチューニング後ルート探索処理実行手段と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出するチューニング後一致率算出手段と、前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率との差を、一致率上昇値として算出する一致率上昇値算出手段と、高速道コストパラメータ相対値,有料道コストパラメータ相対値,一般道コストパラメータ相対値および一致率上昇値を用いて、高速道コストパラメータ変動値,有料道コストパラメータ変動値および一般道コストパラメータ変動値を算出するコストパラメータ変動値算出手段と、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータに対して高速道コストパラメータ変動値,有料道コストパラメータ変動値および一般道コストパラメータ変動値を加算して、コストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータを算出するコストパラメータ算出手段と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率の平均を平均一致率として算出する平均一致率算出手段と、前記平均一致率が上昇しなくなったときに、その時点でのコストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータを最終的な高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータとして決定するコストパラメータ決定手段とを有することを特徴とする。請求項2記載の車両用ナビゲーション装置によれば、チューニング対象ルートとそのコストパラメータチューニング前後のナビゲーションルートとの一致率の差に基づいてコストパラメータの変動値を算出し、コストパラメータを修正する(パラメータチューニング)ことで全体的なナビゲーションルートの質を向上させることができる。
【0009】
請求項3記載の車両用ナビゲーション装置は、請求項1または請求項2記載の車両用ナビゲーション装置において、前記チューニング対象ルートに、ユーザが任意に追加するユーザ走行ルートと、あらかじめ設定されている基準ルートとが含まれることを特徴とする。請求項3記載の車両用ナビゲーション装置によれば、基準ルートをあらかじめチューニング対象ルートに含ませておくことで、ナビゲーションルートの質が極端に低下することを防止することができる。また、基準ルートは、地図データの更新などのタイミングで、追加および更新することができる。
【0010】
請求項4記載のコストパラメータチューニング方法は、チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出する工程と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出する工程と、前記一致率の差から一致率上昇値を算出する工程と、前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとを比較してコストパラメータ相対値を決定する工程と、前記コストパラメータ相対値および前記一致率上昇値を用いてコストパラメータ変動値を算出する工程と、コストパラメータチューニング前のコストパラメータに対して前記コストパラメータ変動値を加算してコストパラメータチューニング後のコストパラメータを算出する工程と、コストパラメータチューニング後の平均一致率を算出する工程と、前記平均一致率が上昇しなくなったときに、その時点でのコストパラメータチューニング後のコストパラメータを最終的なコストパラメータとして決定する工程とを含むことを特徴とする。請求項4記載の車両用ナビゲーション装置によれば、チューニング対象ルートとそのコストパラメータチューニング前後のナビゲーションルートとの一致率の差に基づいてコストパラメータの変動値を算出し、コストパラメータを修正(パラメータチューニング)することで全体的なナビゲーションルートの質を向上させることができる。
【0011】
請求項5記載のコストパラメータチューニング方法は、チューニング対象ルートと同じ出発地および目的地を設定して、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータでルート探索処理を実行する工程と、前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出する工程と、前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとを比較して高速道コストパラメータ相対値,有料道コストパラメータ相対値および一般道コストパラメータ相対値を決定する工程と、前記チューニング対象ルートと同じ出発地および目的地を設定して、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータに対して高速道コストパラメータ相対値,有料道コストパラメータ相対値および一般道コストパラメータ相対値を加算したコストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータでルート探索処理を実行する工程と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出する工程と、前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率との差を、一致率上昇値として算出する工程と、高速道コストパラメータ相対値,有料道コストパラメータ相対値,一般道コストパラメータ相対値および一致率上昇値を用いて、高速道コストパラメータ変動値,有料道コストパラメータ変動値および一般道コストパラメータ変動値を算出する工程と、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータに対して高速道コストパラメータ変動値,有料道コストパラメータ変動値および一般道コストパラメータ変動値を加算して、コストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータを算出する工程と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率の平均を平均一致率として算出する工程と、前記平均一致率が上昇しなくなったときに、その時点でのコストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータを最終的な高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータとして決定する工程とを含むことを特徴とする。請求項5記載のコストパラメータチューニング方法によれば、チューニング対象ルートとそのコストパラメータチューニング前後のナビゲーションルートとの一致率の差に基づいてコストパラメータの変動値を算出し、コストパラメータを修正(パラメータチューニング)することで全体的なナビゲーションルートの質を向上させることができる。
【0012】
請求項6記載のコストパラメータチューニング方法は、請求項4または請求項5記載のコストパラメータチューニング方法において、前記チューニング対象ルートに、ユーザが任意に追加するユーザ走行ルートと、あらかじめ設定されている基準ルートとが含まれることを特徴とする。請求項6記載のコストパラメータチューニング方法によれば、基準ルートをあらかじめチューニング対象ルートに含ませておくことで、ナビゲーションルートの質が極端に低下することを防止することができる。また、基準ルートは、地図データの更新などのタイミングで、追加および更新することができる。
【発明を実施するための最良の形態】
【0013】
チューニング対象ルートとそのコストパラメータチューニング前後のナビゲーションルートとの一致率の差に基づいてコストパラメータの変動値を算出し、コストパラメータを修正した。
【0014】
以下、本発明の実施例について図面を参照して説明する。
【実施例1】
【0015】
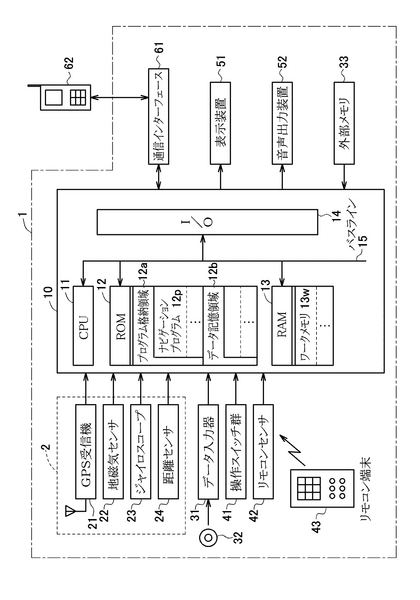
図1は、本発明の実施例1に係る車両用ナビゲーション装置1の構成を示す回路ブロック図である。本実施例1に係る車両用ナビゲーション装置1は、位置検出器2と、データ入力器31と、外部メモリ33と、操作スイッチ群41と、リモコンセンサ42と、リモコン端末43と、表示装置51と、音声出力装置52と、携帯電話機62に接続される通信インターフェース61と、これらが接続された制御回路10とを備えている。
【0016】
位置検出部2は、GPS(Global Positioning System)衛星から送信されたGPS電波を受信し、その受信したGPS電波に格納されているパラメータを演算して位置データを取得するGPS受信機21と、地磁気に基づいて方位を検出し、その検出した方位を表す方位データを取得する地磁気センサ22と、角速度を検出することに基づいて方位を算出し、その算出した方位を示す方位データを取得するジャイロスコープ23と、走行距離を検出し、その検出した距離を示す距離データを取得する距離センサ24とを備えて構成され、各センサが取得した各データを相互補完することによって、自車の現在位置を検出(特定)と正確な走行距離の計測とを行う。
【0017】
データ入力器31は、例えばCD−ROM(Compact Disc - Read Only Memory),DVD−ROM(Digital Versatile Disc - Read Only Memory),HDD(Hard Disc Drive)あるいはメモリカードなどの外部記録媒体32から、地図データ,マップマッチング用データ,目印データあるいはHTML(Hyper Text Markup Language)データなどの各種データを入力する。
【0018】
操作スイッチ群41は、例えば、表示装置51と一体になったタッチスイッチまたはメカニカルなスイッチ等が用いられる。タッチスイッチは、表示装置51の画面上に縦横に微細に配置された赤外線センサより構成されており、例えば指やタッチペンなどでその赤外線を遮断すると、その遮断した位置が次元座標値(X,Y)として検出される。また、マウスやカーソル等のポインティングデバイスを用いてもよい。リモコン端末43も、操作スイッチ群41と同等の機能を有して構成されている。これら操作スイッチ群41およびリモコン端末43により種々の指示を入力することが可能である。
【0019】
表示装置51は、カラー液晶表示器により構成されており、その画面には位置検出器2から入力された車両現在位置マークと、データ入力器31から入力された地図データと、さらに地図上に表示する誘導経路等付加データとを重ね合わせて表示するとともに、本画面にルート探索の設定および経路誘導中の案内や画面の切り換え操作を行うためのメニューボタンが表示される。また、音声出力装置52は、アンプやスピーカから構成され、目的地までのルート探索の実行時には案内のための合成音声を出力する。
【0020】
通信インターフェース61は、携帯電話機62との間のインターフェース機能を有しており、外部ネットワークとの接続を可能にしている。
【0021】
制御回路10は、通常のコンピュータとして構成されており、周知のCPU(Central Processing Unit)11と、ROM(Read Only Memory)12と、RAM(Random Access Memory)13と、I/O(Input/Output)14と、これらの構成を接続するバスライン15とが備えられている。CPU11は、ROM12およびRAM13に記憶されたプログラムおよびデータにより制御を行う。ROM12は、プログラム格納領域12aとデータ記憶領域12bとを有している。プログラム格納領域12aにはナビゲーションプログラム12pが格納される。データ記憶領域12bには、ナビゲーションプログラム12pの動作に必要なデータが格納されている。なお、これらのプログラムおよびデータは、外部メモリ33に記憶されていてもよい。また、ナビゲーションプログラム12pは、RAM13上にてナビゲーションプログラム用ワークメモリ13wを作業領域とする形で作動する。
【0022】
以上のような構成を持つことにより、車両用ナビゲーション装置1では、制御回路10のCPU11によりナビゲーションプログラム12pが起動されると、ユーザが操作スイッチ群41あるいはリモコン端末43を操作して、表示装置51上に表示されるメニューから目的地ルートを表示装置51に表示させるためのルート探索処理を選択することができる。ルート探索処理が選択されると、ユーザが表示装置51上の地図に基づいて目的地を入力することにより、位置検出器2からのデータに基づき車両の現在位置が求められ、現在位置から目的地までの最適なルートが求められる。そして、表示装置51上の道路地図にナビゲーションルートが重ねて表示され、ユーザに適切なルートが案内される。また、表示装置51および音声出力装置52によって、操作時のガイダンスや動作状態に応じたメッセージの送出が行われる。
【0023】
図2は、本発明の実施例1に係るコストパラメータチューニング方法を示すフローチャートである。本実施例1に係るコストパラメータチューニング方法は、コストパラメータ取得ステップS101と、チューニング対象ルート着目ステップS102と、チューニング前ルート探索処理実行ステップ(チューニング前ルート探索処理実行手段)S103と、一致率算出ステップ(チューニング前一致率算出手段)S104と、コストパラメータ相対値決定ステップ(コストパラメータ相対値決定手段)S105と、チューニング後ルート探索処理実行ステップ(チューニング後ルート探索処理実行手段)S106と、チューニング後一致率算出ステップ(チューニング後一致率算出手段)S107と、一致率上昇値算出ステップ(一致率上昇値算出手段)S108と、チューニング対象ルート有無判定ステップS109と、コストパラメータ変動値算出ステップ(コストパラメータ変動値算出手段)S110と、コストパラメータ算出ステップ(コストパラメータ算出手段)S111と、チューニング対象ルート着目ステップS112と、ルート探索処理実行ステップS113と、一致率算出ステップS114と、チューニング対象ルート有無判定ステップS115と、平均一致率算出ステップ(平均一致率算出手段)S116と、変更回数/平均一致率判定ステップS117と、コストパラメータ決定ステップ(コストパラメータ決定手段)S118とからなる。
【0024】
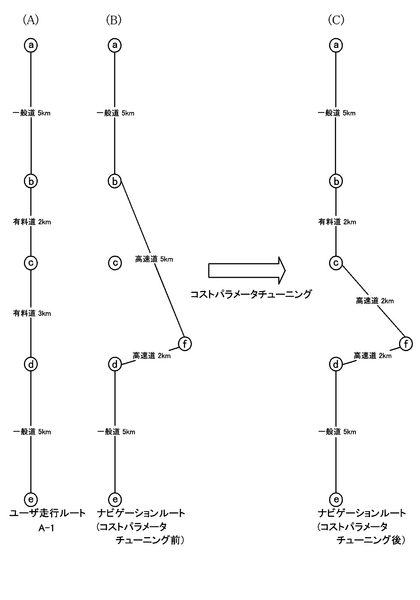
図3(A)はユーザ走行ルートA−1、図3(B)はコストパラメータチューニング前のナビゲーションルート、図3(B)はコストパラメータチューニング後のナビゲーションルートをそれぞれ例示する図である。ユーザ走行ルートA−1は、a→一般道(5km)→b→有料道(2km)→c→有料道(3km)→d→一般道(5km)→eであるものとする。図3中、aは出発地を、eは目的地を、b,c,d,fは中継地をそれぞれ示す。
【0025】
次に、このように構成された実施例1に係る車両用ナビゲーション装置1の動作について説明する。
【0026】
コストパラメータチューニング処理を行う前に、ユーザは、ナビゲーションルートとの差分が発生したユーザ走行ルートを、コストパラメータチューニング処理の対象とするルート(以下、チューニング対象ルートという)として、あらかじめ車両用ナビゲーション装置1のデータ記憶領域12bに複数記憶しておく。いま、チューニング対象ルートとして記憶されているユーザ走行ルートを、ユーザ走行ルートA−1(図3(A)参照)およびユーザ走行ルートA−2(図示せず)とする。
【0027】
また、車両用ナビゲーション装置1のデータ記憶領域12bには、コストパラメータチューニング処理の対象として一般的に望ましいとされるルート(以下、基準ルートという)が、チューニング対象ルートとしてあらかじめ記憶されている。いま記憶されている基準ルートを、基準ルートB(図示せず)とする。なお、基準ルートは、ナビゲーションルートの質を一定に保つために必要であるが、ユーザ走行ルートだけに基づいてコストパラメータチューニング処理を行うことも可能である。
【0028】
さらに、車両用ナビゲーション装置100は、ナビゲーションプログラム12pのデータとして、表1に示す高速道,有料道および一般道の道路種別ごとのコストパラメータをデータ記憶領域12bに記憶しているものとする。具体的には、コストパラメータチューニング前の高速道コストパラメータ0.4,有料道コストパラメータ0.8,および一般道コストパラメータ1を記憶しているものとする。
【0029】
【表1】

【0030】
車両用ナビゲーション装置1に対して、ユーザが、操作スイッチ群41,リモコン端末43等により、コストパラメータチューニング処理(図2参照)の開始を指示すると、CPU11は、まず、データ記憶領域12bに記憶されている、コストパラメータチューニング前の高速道コストパラメータ0.4,有料道コストパラメータ0.8,および一般道コストパラメータ1(表1参照)を取得する(ステップS101)。
【0031】
次に、CPU11は、図3(A)に示すユーザ走行ルートA−1に着目し(ステップS102)、同じ出発地aおよび目的地eを設定して、コストパラメータチューニング前の高速道コストパラメータ0.4,有料道コストパラメータ0.8,および一般道コストパラメータ1でルート探索処理を実行する(ステップS103)。この結果、コストパラメータチューニング前のナビゲーションルートが、図3(B)に示すように、a→一般道(5km)→b→高速道(5km)→f→高速道(2km)→d→一般道(5km)→eとして探索されたものとする。ちなみに、図3(A)のユーザ走行ルートA−1のコストは、1×5+2×0.8+3×0.8+1×5=14となり、図3(B)のコストパラメータチューニング前のナビゲーションルートのコストは、1×5+5×0.4+2×0.4+1×5=12.8となる。
【0032】
続いて、CPU11は、図3(A)のユーザ走行ルートA−1と図3(B)のコストパラメータチューニング前のナビゲーションルートとの一致率を、ユーザ走行ルートA−1とナビゲーションルートとをそれぞれリンクごとに分割し、その中で一致しているリンク長と、ユーザ走行ルートA−1のリンク長との比率として計算する(ステップS104)。すなわち、一致率を、(ユーザ走行ルート中のナビゲーションルートと一致しているリンク長)÷(ユーザ走行ルートの全リンク長)と定義すると、ユーザ走行ルートA−1とナビゲーションルートとの一致率は、表2中に示すように、(5+5)÷(5+3+2+5)=0.66(66%、小数点以下を削除)となる。
【0033】
【表2】
【0034】
次に、CPU11は、ユーザ走行ルートA−1について、高速道コストパラメータ相対値,有料道コストパラメータ相対値,および一般道コストパラメータ相対値をそれぞれ決定する(ステップS105)。具体的には、図3(A)のユーザ走行ルートA−1と、図3(B)のコストパラメータチューニング前のナビゲーションルートとを比較して、現在のコストパラメータでは、高速道が探索されやすく、有料道が探索されにくいと判断し、表2中に示すように、高速道コストパラメータ相対値,有料道コストパラメータ相対値,および一般道コストパラメータ相対値を、それぞれ0.1,−0.1および0と決定するものとする。詳しくは、図3(A)のユーザ走行ルートA−1が有料道を通っており、図3(B)のコストパラメータチューニング前のナビゲーションルートが高速道を通っているとすると、有料道コストパラメータと高速道コストパラメータとを修正対象と決定し、有料道を通りやすくし(有料道コストパラメータ相対値−0.1)、高速道を通りにくくする(高速道コストパラメータ相対値+0.1)。すなわち、チューニング対象ルートとナビゲーションルートとをリンクごとに分割し、差分となっているリンクの道路種別のコストパラメータをチューニング対象として決定して、コストパラメータ相対値として増減する。
【0035】
続いて、CPU11は、図3(A)のユーザ走行ルートA−1と同じ出発地aおよび目的地eを設定して、高速道コストパラメータ相対値0.1,有料道コストパラメータ相対値−0.1,および一般道コストパラメータ相対値0を加算した、コストパラメータチューニング後の高速道コストパラメータ0.5,有料道コストパラメータ0.7,および一般道コストパラメータ1でルート探索処理を実行する(ステップS106)。この結果、コストパラメータチューニング後のナビゲーションルートが、図3(C)に示すように、a→一般道(5km)→b→有料道(2km)→c→高速道(2km)→f→高速道(2km)→d→一般道(5km)→eとして探索されたものとする。ちなみに、図3(A)のユーザ走行ルートA−1のコストは、1×5+2×0.7+3×0.7+1×5=13.5となり、図3(B)のコストパラメータチューニング前のナビゲーションルートのコストは、1×5+5×0.5+2×0.5+1×5=13.5となり、図3(C)のコストパラメータチューニング後のナビゲーションルートのコストは、1×5+2×0.7+2×0.5+2×0.5+1×5=12.8となる。
【0036】
次に、CPU11は、図3(A)のユーザ走行ルートA−1と図3(C)のコストパラメータチューニング後のナビゲーションルートとの一致率を算出する(ステップS107)。いま、一致率は、(ユーザ走行ルート中のナビゲーションルートと一致しているリンク長)÷(ユーザ走行ルートの全リンク長)と定義されているので、図3(A)のユーザ走行ルートA−1と図3(C)のコストパラメータチューニング後のナビゲーションルートとの一致率は、(5+5+2)÷(5+3+2+5)=0.80(80%)となる。ここでは、コストチューニングによって、図3(A)のユーザ走行ルートA−1の中の、図3(C)のコストパラメータチューニング後のナビゲーションルートに一致しているリンク長が増加することにより、一致率が増加している。
【0037】
続いて、CPU11は、図3(A)のユーザ走行ルートA−1と図3(B)のコストパラメータチューニング前のナビゲーションルートとの一致率66%と、図3(A)のユーザ走行ルートA−1と図3(C)のコストパラメータチューニング後のナビゲーションルートとの一致率80%との差を、一致率上昇値14%(表2参照)として算出する(ステップS108)。
【0038】
そして、CPU11は、図示しないユーザ走行ルートA−2についても、上述のような処理(ステップS102〜S108)を繰り返す(ステップS109でYes)。この結果、表2中に示すように、ユーザ走行ルートA−2とコストパラメータチューニング前のナビゲーションルートとの一致率が70%、コストパラメータチューニング後の高速道コストパラメータ相対値が−0.1、有料道コストパラメータ相対値が−0.2、一般道コストパラメータ相対値が0、一致率上昇値が15%となったものとする。
【0039】
さらに、CPU11は、図示しない基準ルートBについても、上述のような処理(ステップS102〜S108)を繰り返す(ステップS109でYes)。この結果、表2中に示すように、基準ルートBとコストパラメータチューニング前のナビゲーションルートとの一致率が80%、コストパラメータチューニング後の高速道コストパラメータ相対値が0.4、有料道コストパラメータ相対値が0.2、一般道コストパラメータ相対値が−0.1、一致率上昇値が10%となったものとする。
【0040】
そして、CPU11は、表2のように得られたユーザ走行ルートA−1,A−2および基準ルートBの高速道コストパラメータ相対値,有料道コストパラメータ相対値,一般道コストパラメータ相対値および一致率上昇値を用いて、表3に示すように、高速道コストパラメータ変動値,有料道コストパラメータ変動値,および一般道コストパラメータ変動値を算出する(ステップS110)。具体的には、高速道コストパラメータ変動値が(0.1×14−0.1×15+0.4×10)/(14+15+10)=0.1、有料道コストパラメータ変動値が(−0.1×14−0.2×15+0.2×10)/(14+15+10)=−0.06(小数点3桁以下を四捨五入)、一般道コストパラメータ変動値が(0×14−0×15+0.1×10)/(14+15+10)=−0.03(小数点3桁以下を四捨五入)として得られたものとする。ここでは、修正対象のコストパラメータについて、より一致率の高いコストパラメータ変動値を反映させるために、ユーザ走行ルートA−1,A−2および基準ルートBのそれぞれで決定された修正対象のコストパラメータ相対値に一致率上昇値で重み付けを行い、最終的なコストパラメータ変動値を算出している。
【0041】
【表3】
【0042】
次に、CPU11は、表1に示したコストパラメータチューニング前の高速道コストパラメータ0.4,有料道コストパラメータ0.8,および一般道コストパラメータ1に、表3に示した高速道コストパラメータ変動値0.1,有料道コストパラメータ変動値−0.06,および一般道コストパラメータ変動値−0.03をそれぞれ加算し、表4に示すようなコストパラメータチューニング後の高速道コストパラメータ0.5,有料道コストパラメータ0.74,および一般道コストパラメータ0.97を算出する(ステップS111)。
【0043】
【表4】
【0044】
続いて、CPU11は、図3(A)に示すユーザ走行ルートA−1に着目し(ステップS112)、同じ出発地aおよび目的地eを設定して、コストパラメータチューニング後の高速道コストパラメータ0.5,有料道コストパラメータ0.74,および一般道コストパラメータ0.97でルート探索処理を実行する(ステップS113)。ちなみに、図3(A)のユーザ走行ルートA−1のコストは、0.97×5+2×0.74+3×0.74+0.97×5=13.4となり、図3(B)のナビゲーションルートのコストは、0.97×5+5×0.5+2×0.5+0.97×5=13.2となり、図3(C)のナビゲーションルートのコストは、0.97×5+2×0.74+2×0.5+2×0.5+0.97×5=13.18となるので、図3(C)のナビゲーションルートが探索される。
【0045】
次に、CPU11は、図3(A)のユーザ走行ルートA−1とコストパラメータチューニング後のナビゲーションルートとの一致率を、ユーザ走行ルートA−1とコストパラメータチューニング後のナビゲーションルートとをそれぞれリンクごとに分割し、その中で一致しているリンク長と、ユーザ走行ルートA−1のリンク長との比率として計算する(ステップS114)。
【0046】
そして、CPU11は、図示しないユーザ走行ルートA−2についても、上述のような処理(ステップS112〜S114)を繰り返す(ステップS115でYes)。
【0047】
さらに、CPU11は、図示しない基準ルートBについても、上述のような処理(ステップS112〜S114)を繰り返す(ステップS115でYes)。
【0048】
次に、CPU11は、図3(A)のユーザ走行ルートA−1とコストパラメータチューニング後のナビゲーションルートとの一致率,ユーザ走行ルートA−2とコストパラメータチューニング後のナビゲーションルートとの一致率,および基準ルートBとコストパラメータチューニング後のナビゲーションルートとの一致率の平均値を、平均一致率として算出する(ステップS116)。
【0049】
そして、CPU11は、コストパラメータ変更回数が規定回数以内、かつ平均一致率が上昇であれば(ステップS117:YES)、ステップS101に制御を戻して、ステップS101〜S116を繰り返す。コストパラメータは一度のチューニングでは最適値にならないので、徐々に近づけていくために、繰り返し処理を行っている。
【0050】
コストパラメータ変更回数が規定回数より大きくなるか、または平均一致率が上昇しなくなると(ステップS117:NO)、CPU11は、その時点での高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータを最終的な高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータとして決定する(ステップS118)。
【0051】
なお、実施例1の動作の説明では、ユーザ走行ルートとして2つのユーザ走行ルートA−1およびA−2がユーザによって記憶され、基準ルートとして1つの基準ルートBがあらかじめ記憶されているものとしたが、ユーザ走行ルートおよび基準ルートの記憶数は任意であり、これらがどのような数であっても、本発明が同様に適用できることはいうまでもない。
【0052】
以上、本発明の実施例1を説明したが、これはあくまでも例示にすぎず、本発明はこれに限定されるものではなく、特許請求の範囲の趣旨を逸脱しない限りにおいて、当業者の知識に基づく種々の変更が可能である。例えば、実施例1では、コストパラメータを高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータの3種類としたが、それ以外の道路幅コストパラメータ,交差点コストパラメータ等のその他のコストパラメータを導入しても、本発明が同様に適用できることはいうまでもない。
【図面の簡単な説明】
【0053】
【図1】本発明の実施例1に係る車両用ナビゲーション装置の構成を示すブロック図。
【図2】本発明の実施例1に係るコストパラメータチューニング方法を示すフローチャート。
【図3】(A)はユーザ走行ルート、(B)はコストパラメータチューニング前のナビゲーションルート、(B)はコストパラメータチューニング後のナビゲーションルートをそれぞれ例示する図。
【符号の説明】
【0054】
1 車両用ナビゲーション装置
10 制御回路
2 位置検出器
33 外部メモリ
31 データ入力器
41 操作スイッチ群
43 リモコン端末
42 リモコンセンサ
51 表示装置
52 音声出力装置
S101 コストパラメータ取得ステップ
S102 チューニング対象ルート着目ステップ
S103 チューニング前ルート探索処理実行ステップ(チューニング前ルート探索処理実行手段)
S104 チューニング前一致率算出ステップ(チューニング前一致率算出手段)
S105 コストパラメータ相対値決定ステップ(コストパラメータ相対値決定手段)
S106 チューニング後ルート探索処理実行ステップ(チューニング後ルート探索処理実行手段)
S107 チューニング後一致率算出ステップ(チューニング後一致率算出手段)
S108 一致率上昇値算出ステップ(一致率上昇値算出手段)
S109 チューニング対象ルート有無判定ステップ
S110 コストパラメータ変動値算出ステップ(コストパラメータ変動値算出手段)
S111 コストパラメータ算出ステップ(コストパラメータ算出手段)
S112 チューニング対象ルート着目ステップ
S113 ルート探索処理実行ステップ
S114 一致率算出ステップ
S115 チューニング対象ルート有無判定ステップ
S116 平均一致率算出ステップ(平均一致率算出手段)
S117 変更回数/平均一致率判定ステップ
S118 コストパラメータ決定ステップ(コストパラメータ決定手段)
【技術分野】
【0001】
本発明は車両用ナビゲーション装置およびコストパラメータチューニング方法に関し、特に出発地から目的地までのルートを探索してユーザ(運転者等)に提示する車両用ナビゲーション装置およびコストパラメータチューニング方法に関する。
【背景技術】
【0002】
従来から、出発地から目的地までのルートを探索し、地図データに基づいて表示画面に表示した道路地図上に、車両の現在地および探索したルートを表示するようにした車両用ナビゲーション装置はよく知られている。この場合、地図データは、道路地図上の2点を結ぶリンクをそれぞれ表す複数のリンクデータおよび前記各リンクに対応してルート探索に利用される複数のルート探索用データ(例えば、リンク長,道路幅係数,道路種別係数,渋滞係数など)からなり、前記ルートの探索においては、出発地から目的地までを複数のリンクで接続した複数組のルートを想定し、同想定した各ルートごとに出発地から目的地までの複数のリンクに対応した各ルート探索用データを累算してルートのコストをそれぞれ計算し、ルートのコストが最小になるルートが運転者に提示されるようにしている。
【0003】
車両用ナビゲーション装置が案内するルートに対して、ユーザが異なったルートを走行した場合に、その差分を記憶し、次のルート探索では同じルートが探索されるようになるルート学習機能が知られている(例えば、特許文献1参照)。
【特許文献1】特開2004−45054号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上述した従来技術は、ルート学習においてユーザ走行ルートとナビゲーションルートとの差分を記憶しておき、ルート探索後にその差分を反映するという機能であるが、ユーザが走行していない道路に対してはまったく反映されないという問題点があった。
【0005】
本発明の第1の課題は、上述のような事情を背景になされたものであって、現状のナビゲーションルートに不満がある場合に、ユーザがチューニング対象ルートに任意のユーザ走行ルートを追加することでコストパラメータをより満足度の高い方向に変更することができるようにした車両用ナビゲーション装置を提供することにある。
【0006】
本発明の第2の課題は、現状のナビゲーションルートに不満がある場合に、ユーザがチューニング対象ルートに任意のユーザ走行ルートを追加することでコストパラメータをより満足度の高い方向に変更することができるコストパラメータチューニング方法を提供することにある。
【課題を解決するための手段および発明の効果】
【0007】
請求項1記載の車両用ナビゲーション装置は、チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出するチューニング前一致率算出手段と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出するチューニング後一致率算出手段と、前記一致率の差から一致率上昇値を算出する一致率上昇値算出手段と、前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとを比較してコストパラメータ相対値を決定するコストパラメータ相対値決定手段と、前記コストパラメータ相対値および前記一致率上昇値を用いてコストパラメータ変動値を算出するコストパラメータ変動値算出手段と、コストパラメータチューニング前のコストパラメータに対して前記コストパラメータ変動値を加算してコストパラメータチューニング後のコストパラメータを算出するチューニング後コストパラメータ算出手段と、コストパラメータチューニング後の平均一致率を算出する平均一致率算出手段と、前記平均一致率が上昇しなくなったときに、その時点でのコストパラメータチューニング後のコストパラメータを最終的なコストパラメータとして決定するコストパラメータ決定手段とを有することを特徴とする。請求項1記載の車両用ナビゲーション装置によれば、チューニング対象ルートとそのコストパラメータチューニング前後のナビゲーションルートとの一致率の差に基づいてコストパラメータの変動値を算出し、コストパラメータを修正(パラメータチューニング)することで全体的なナビゲーションルートの質を向上させることができる。
【0008】
請求項2記載の車両用ナビゲーション装置は、チューニング対象ルートと同じ出発地および目的地を設定して、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータでルート探索処理を実行するチューニング前ルート探索処理実行手段と、前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出するチューニング前一致率算出手段と、前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとを比較して高速道コストパラメータ相対値,有料道コストパラメータ相対値および一般道コストパラメータ相対値を決定するコストパラメータ相対値決定手段と、前記チューニング対象ルートと同じ出発地および目的地を設定して、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータに対して高速道コストパラメータ相対値,有料道コストパラメータ相対値および一般道コストパラメータ相対値を加算したコストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータでルート探索処理を実行するチューニング後ルート探索処理実行手段と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出するチューニング後一致率算出手段と、前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率との差を、一致率上昇値として算出する一致率上昇値算出手段と、高速道コストパラメータ相対値,有料道コストパラメータ相対値,一般道コストパラメータ相対値および一致率上昇値を用いて、高速道コストパラメータ変動値,有料道コストパラメータ変動値および一般道コストパラメータ変動値を算出するコストパラメータ変動値算出手段と、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータに対して高速道コストパラメータ変動値,有料道コストパラメータ変動値および一般道コストパラメータ変動値を加算して、コストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータを算出するコストパラメータ算出手段と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率の平均を平均一致率として算出する平均一致率算出手段と、前記平均一致率が上昇しなくなったときに、その時点でのコストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータを最終的な高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータとして決定するコストパラメータ決定手段とを有することを特徴とする。請求項2記載の車両用ナビゲーション装置によれば、チューニング対象ルートとそのコストパラメータチューニング前後のナビゲーションルートとの一致率の差に基づいてコストパラメータの変動値を算出し、コストパラメータを修正する(パラメータチューニング)ことで全体的なナビゲーションルートの質を向上させることができる。
【0009】
請求項3記載の車両用ナビゲーション装置は、請求項1または請求項2記載の車両用ナビゲーション装置において、前記チューニング対象ルートに、ユーザが任意に追加するユーザ走行ルートと、あらかじめ設定されている基準ルートとが含まれることを特徴とする。請求項3記載の車両用ナビゲーション装置によれば、基準ルートをあらかじめチューニング対象ルートに含ませておくことで、ナビゲーションルートの質が極端に低下することを防止することができる。また、基準ルートは、地図データの更新などのタイミングで、追加および更新することができる。
【0010】
請求項4記載のコストパラメータチューニング方法は、チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出する工程と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出する工程と、前記一致率の差から一致率上昇値を算出する工程と、前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとを比較してコストパラメータ相対値を決定する工程と、前記コストパラメータ相対値および前記一致率上昇値を用いてコストパラメータ変動値を算出する工程と、コストパラメータチューニング前のコストパラメータに対して前記コストパラメータ変動値を加算してコストパラメータチューニング後のコストパラメータを算出する工程と、コストパラメータチューニング後の平均一致率を算出する工程と、前記平均一致率が上昇しなくなったときに、その時点でのコストパラメータチューニング後のコストパラメータを最終的なコストパラメータとして決定する工程とを含むことを特徴とする。請求項4記載の車両用ナビゲーション装置によれば、チューニング対象ルートとそのコストパラメータチューニング前後のナビゲーションルートとの一致率の差に基づいてコストパラメータの変動値を算出し、コストパラメータを修正(パラメータチューニング)することで全体的なナビゲーションルートの質を向上させることができる。
【0011】
請求項5記載のコストパラメータチューニング方法は、チューニング対象ルートと同じ出発地および目的地を設定して、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータでルート探索処理を実行する工程と、前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出する工程と、前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとを比較して高速道コストパラメータ相対値,有料道コストパラメータ相対値および一般道コストパラメータ相対値を決定する工程と、前記チューニング対象ルートと同じ出発地および目的地を設定して、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータに対して高速道コストパラメータ相対値,有料道コストパラメータ相対値および一般道コストパラメータ相対値を加算したコストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータでルート探索処理を実行する工程と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出する工程と、前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率との差を、一致率上昇値として算出する工程と、高速道コストパラメータ相対値,有料道コストパラメータ相対値,一般道コストパラメータ相対値および一致率上昇値を用いて、高速道コストパラメータ変動値,有料道コストパラメータ変動値および一般道コストパラメータ変動値を算出する工程と、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータに対して高速道コストパラメータ変動値,有料道コストパラメータ変動値および一般道コストパラメータ変動値を加算して、コストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータを算出する工程と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率の平均を平均一致率として算出する工程と、前記平均一致率が上昇しなくなったときに、その時点でのコストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータを最終的な高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータとして決定する工程とを含むことを特徴とする。請求項5記載のコストパラメータチューニング方法によれば、チューニング対象ルートとそのコストパラメータチューニング前後のナビゲーションルートとの一致率の差に基づいてコストパラメータの変動値を算出し、コストパラメータを修正(パラメータチューニング)することで全体的なナビゲーションルートの質を向上させることができる。
【0012】
請求項6記載のコストパラメータチューニング方法は、請求項4または請求項5記載のコストパラメータチューニング方法において、前記チューニング対象ルートに、ユーザが任意に追加するユーザ走行ルートと、あらかじめ設定されている基準ルートとが含まれることを特徴とする。請求項6記載のコストパラメータチューニング方法によれば、基準ルートをあらかじめチューニング対象ルートに含ませておくことで、ナビゲーションルートの質が極端に低下することを防止することができる。また、基準ルートは、地図データの更新などのタイミングで、追加および更新することができる。
【発明を実施するための最良の形態】
【0013】
チューニング対象ルートとそのコストパラメータチューニング前後のナビゲーションルートとの一致率の差に基づいてコストパラメータの変動値を算出し、コストパラメータを修正した。
【0014】
以下、本発明の実施例について図面を参照して説明する。
【実施例1】
【0015】
図1は、本発明の実施例1に係る車両用ナビゲーション装置1の構成を示す回路ブロック図である。本実施例1に係る車両用ナビゲーション装置1は、位置検出器2と、データ入力器31と、外部メモリ33と、操作スイッチ群41と、リモコンセンサ42と、リモコン端末43と、表示装置51と、音声出力装置52と、携帯電話機62に接続される通信インターフェース61と、これらが接続された制御回路10とを備えている。
【0016】
位置検出部2は、GPS(Global Positioning System)衛星から送信されたGPS電波を受信し、その受信したGPS電波に格納されているパラメータを演算して位置データを取得するGPS受信機21と、地磁気に基づいて方位を検出し、その検出した方位を表す方位データを取得する地磁気センサ22と、角速度を検出することに基づいて方位を算出し、その算出した方位を示す方位データを取得するジャイロスコープ23と、走行距離を検出し、その検出した距離を示す距離データを取得する距離センサ24とを備えて構成され、各センサが取得した各データを相互補完することによって、自車の現在位置を検出(特定)と正確な走行距離の計測とを行う。
【0017】
データ入力器31は、例えばCD−ROM(Compact Disc - Read Only Memory),DVD−ROM(Digital Versatile Disc - Read Only Memory),HDD(Hard Disc Drive)あるいはメモリカードなどの外部記録媒体32から、地図データ,マップマッチング用データ,目印データあるいはHTML(Hyper Text Markup Language)データなどの各種データを入力する。
【0018】
操作スイッチ群41は、例えば、表示装置51と一体になったタッチスイッチまたはメカニカルなスイッチ等が用いられる。タッチスイッチは、表示装置51の画面上に縦横に微細に配置された赤外線センサより構成されており、例えば指やタッチペンなどでその赤外線を遮断すると、その遮断した位置が次元座標値(X,Y)として検出される。また、マウスやカーソル等のポインティングデバイスを用いてもよい。リモコン端末43も、操作スイッチ群41と同等の機能を有して構成されている。これら操作スイッチ群41およびリモコン端末43により種々の指示を入力することが可能である。
【0019】
表示装置51は、カラー液晶表示器により構成されており、その画面には位置検出器2から入力された車両現在位置マークと、データ入力器31から入力された地図データと、さらに地図上に表示する誘導経路等付加データとを重ね合わせて表示するとともに、本画面にルート探索の設定および経路誘導中の案内や画面の切り換え操作を行うためのメニューボタンが表示される。また、音声出力装置52は、アンプやスピーカから構成され、目的地までのルート探索の実行時には案内のための合成音声を出力する。
【0020】
通信インターフェース61は、携帯電話機62との間のインターフェース機能を有しており、外部ネットワークとの接続を可能にしている。
【0021】
制御回路10は、通常のコンピュータとして構成されており、周知のCPU(Central Processing Unit)11と、ROM(Read Only Memory)12と、RAM(Random Access Memory)13と、I/O(Input/Output)14と、これらの構成を接続するバスライン15とが備えられている。CPU11は、ROM12およびRAM13に記憶されたプログラムおよびデータにより制御を行う。ROM12は、プログラム格納領域12aとデータ記憶領域12bとを有している。プログラム格納領域12aにはナビゲーションプログラム12pが格納される。データ記憶領域12bには、ナビゲーションプログラム12pの動作に必要なデータが格納されている。なお、これらのプログラムおよびデータは、外部メモリ33に記憶されていてもよい。また、ナビゲーションプログラム12pは、RAM13上にてナビゲーションプログラム用ワークメモリ13wを作業領域とする形で作動する。
【0022】
以上のような構成を持つことにより、車両用ナビゲーション装置1では、制御回路10のCPU11によりナビゲーションプログラム12pが起動されると、ユーザが操作スイッチ群41あるいはリモコン端末43を操作して、表示装置51上に表示されるメニューから目的地ルートを表示装置51に表示させるためのルート探索処理を選択することができる。ルート探索処理が選択されると、ユーザが表示装置51上の地図に基づいて目的地を入力することにより、位置検出器2からのデータに基づき車両の現在位置が求められ、現在位置から目的地までの最適なルートが求められる。そして、表示装置51上の道路地図にナビゲーションルートが重ねて表示され、ユーザに適切なルートが案内される。また、表示装置51および音声出力装置52によって、操作時のガイダンスや動作状態に応じたメッセージの送出が行われる。
【0023】
図2は、本発明の実施例1に係るコストパラメータチューニング方法を示すフローチャートである。本実施例1に係るコストパラメータチューニング方法は、コストパラメータ取得ステップS101と、チューニング対象ルート着目ステップS102と、チューニング前ルート探索処理実行ステップ(チューニング前ルート探索処理実行手段)S103と、一致率算出ステップ(チューニング前一致率算出手段)S104と、コストパラメータ相対値決定ステップ(コストパラメータ相対値決定手段)S105と、チューニング後ルート探索処理実行ステップ(チューニング後ルート探索処理実行手段)S106と、チューニング後一致率算出ステップ(チューニング後一致率算出手段)S107と、一致率上昇値算出ステップ(一致率上昇値算出手段)S108と、チューニング対象ルート有無判定ステップS109と、コストパラメータ変動値算出ステップ(コストパラメータ変動値算出手段)S110と、コストパラメータ算出ステップ(コストパラメータ算出手段)S111と、チューニング対象ルート着目ステップS112と、ルート探索処理実行ステップS113と、一致率算出ステップS114と、チューニング対象ルート有無判定ステップS115と、平均一致率算出ステップ(平均一致率算出手段)S116と、変更回数/平均一致率判定ステップS117と、コストパラメータ決定ステップ(コストパラメータ決定手段)S118とからなる。
【0024】
図3(A)はユーザ走行ルートA−1、図3(B)はコストパラメータチューニング前のナビゲーションルート、図3(B)はコストパラメータチューニング後のナビゲーションルートをそれぞれ例示する図である。ユーザ走行ルートA−1は、a→一般道(5km)→b→有料道(2km)→c→有料道(3km)→d→一般道(5km)→eであるものとする。図3中、aは出発地を、eは目的地を、b,c,d,fは中継地をそれぞれ示す。
【0025】
次に、このように構成された実施例1に係る車両用ナビゲーション装置1の動作について説明する。
【0026】
コストパラメータチューニング処理を行う前に、ユーザは、ナビゲーションルートとの差分が発生したユーザ走行ルートを、コストパラメータチューニング処理の対象とするルート(以下、チューニング対象ルートという)として、あらかじめ車両用ナビゲーション装置1のデータ記憶領域12bに複数記憶しておく。いま、チューニング対象ルートとして記憶されているユーザ走行ルートを、ユーザ走行ルートA−1(図3(A)参照)およびユーザ走行ルートA−2(図示せず)とする。
【0027】
また、車両用ナビゲーション装置1のデータ記憶領域12bには、コストパラメータチューニング処理の対象として一般的に望ましいとされるルート(以下、基準ルートという)が、チューニング対象ルートとしてあらかじめ記憶されている。いま記憶されている基準ルートを、基準ルートB(図示せず)とする。なお、基準ルートは、ナビゲーションルートの質を一定に保つために必要であるが、ユーザ走行ルートだけに基づいてコストパラメータチューニング処理を行うことも可能である。
【0028】
さらに、車両用ナビゲーション装置100は、ナビゲーションプログラム12pのデータとして、表1に示す高速道,有料道および一般道の道路種別ごとのコストパラメータをデータ記憶領域12bに記憶しているものとする。具体的には、コストパラメータチューニング前の高速道コストパラメータ0.4,有料道コストパラメータ0.8,および一般道コストパラメータ1を記憶しているものとする。
【0029】
【表1】
【0030】
車両用ナビゲーション装置1に対して、ユーザが、操作スイッチ群41,リモコン端末43等により、コストパラメータチューニング処理(図2参照)の開始を指示すると、CPU11は、まず、データ記憶領域12bに記憶されている、コストパラメータチューニング前の高速道コストパラメータ0.4,有料道コストパラメータ0.8,および一般道コストパラメータ1(表1参照)を取得する(ステップS101)。
【0031】
次に、CPU11は、図3(A)に示すユーザ走行ルートA−1に着目し(ステップS102)、同じ出発地aおよび目的地eを設定して、コストパラメータチューニング前の高速道コストパラメータ0.4,有料道コストパラメータ0.8,および一般道コストパラメータ1でルート探索処理を実行する(ステップS103)。この結果、コストパラメータチューニング前のナビゲーションルートが、図3(B)に示すように、a→一般道(5km)→b→高速道(5km)→f→高速道(2km)→d→一般道(5km)→eとして探索されたものとする。ちなみに、図3(A)のユーザ走行ルートA−1のコストは、1×5+2×0.8+3×0.8+1×5=14となり、図3(B)のコストパラメータチューニング前のナビゲーションルートのコストは、1×5+5×0.4+2×0.4+1×5=12.8となる。
【0032】
続いて、CPU11は、図3(A)のユーザ走行ルートA−1と図3(B)のコストパラメータチューニング前のナビゲーションルートとの一致率を、ユーザ走行ルートA−1とナビゲーションルートとをそれぞれリンクごとに分割し、その中で一致しているリンク長と、ユーザ走行ルートA−1のリンク長との比率として計算する(ステップS104)。すなわち、一致率を、(ユーザ走行ルート中のナビゲーションルートと一致しているリンク長)÷(ユーザ走行ルートの全リンク長)と定義すると、ユーザ走行ルートA−1とナビゲーションルートとの一致率は、表2中に示すように、(5+5)÷(5+3+2+5)=0.66(66%、小数点以下を削除)となる。
【0033】
【表2】
【0034】
次に、CPU11は、ユーザ走行ルートA−1について、高速道コストパラメータ相対値,有料道コストパラメータ相対値,および一般道コストパラメータ相対値をそれぞれ決定する(ステップS105)。具体的には、図3(A)のユーザ走行ルートA−1と、図3(B)のコストパラメータチューニング前のナビゲーションルートとを比較して、現在のコストパラメータでは、高速道が探索されやすく、有料道が探索されにくいと判断し、表2中に示すように、高速道コストパラメータ相対値,有料道コストパラメータ相対値,および一般道コストパラメータ相対値を、それぞれ0.1,−0.1および0と決定するものとする。詳しくは、図3(A)のユーザ走行ルートA−1が有料道を通っており、図3(B)のコストパラメータチューニング前のナビゲーションルートが高速道を通っているとすると、有料道コストパラメータと高速道コストパラメータとを修正対象と決定し、有料道を通りやすくし(有料道コストパラメータ相対値−0.1)、高速道を通りにくくする(高速道コストパラメータ相対値+0.1)。すなわち、チューニング対象ルートとナビゲーションルートとをリンクごとに分割し、差分となっているリンクの道路種別のコストパラメータをチューニング対象として決定して、コストパラメータ相対値として増減する。
【0035】
続いて、CPU11は、図3(A)のユーザ走行ルートA−1と同じ出発地aおよび目的地eを設定して、高速道コストパラメータ相対値0.1,有料道コストパラメータ相対値−0.1,および一般道コストパラメータ相対値0を加算した、コストパラメータチューニング後の高速道コストパラメータ0.5,有料道コストパラメータ0.7,および一般道コストパラメータ1でルート探索処理を実行する(ステップS106)。この結果、コストパラメータチューニング後のナビゲーションルートが、図3(C)に示すように、a→一般道(5km)→b→有料道(2km)→c→高速道(2km)→f→高速道(2km)→d→一般道(5km)→eとして探索されたものとする。ちなみに、図3(A)のユーザ走行ルートA−1のコストは、1×5+2×0.7+3×0.7+1×5=13.5となり、図3(B)のコストパラメータチューニング前のナビゲーションルートのコストは、1×5+5×0.5+2×0.5+1×5=13.5となり、図3(C)のコストパラメータチューニング後のナビゲーションルートのコストは、1×5+2×0.7+2×0.5+2×0.5+1×5=12.8となる。
【0036】
次に、CPU11は、図3(A)のユーザ走行ルートA−1と図3(C)のコストパラメータチューニング後のナビゲーションルートとの一致率を算出する(ステップS107)。いま、一致率は、(ユーザ走行ルート中のナビゲーションルートと一致しているリンク長)÷(ユーザ走行ルートの全リンク長)と定義されているので、図3(A)のユーザ走行ルートA−1と図3(C)のコストパラメータチューニング後のナビゲーションルートとの一致率は、(5+5+2)÷(5+3+2+5)=0.80(80%)となる。ここでは、コストチューニングによって、図3(A)のユーザ走行ルートA−1の中の、図3(C)のコストパラメータチューニング後のナビゲーションルートに一致しているリンク長が増加することにより、一致率が増加している。
【0037】
続いて、CPU11は、図3(A)のユーザ走行ルートA−1と図3(B)のコストパラメータチューニング前のナビゲーションルートとの一致率66%と、図3(A)のユーザ走行ルートA−1と図3(C)のコストパラメータチューニング後のナビゲーションルートとの一致率80%との差を、一致率上昇値14%(表2参照)として算出する(ステップS108)。
【0038】
そして、CPU11は、図示しないユーザ走行ルートA−2についても、上述のような処理(ステップS102〜S108)を繰り返す(ステップS109でYes)。この結果、表2中に示すように、ユーザ走行ルートA−2とコストパラメータチューニング前のナビゲーションルートとの一致率が70%、コストパラメータチューニング後の高速道コストパラメータ相対値が−0.1、有料道コストパラメータ相対値が−0.2、一般道コストパラメータ相対値が0、一致率上昇値が15%となったものとする。
【0039】
さらに、CPU11は、図示しない基準ルートBについても、上述のような処理(ステップS102〜S108)を繰り返す(ステップS109でYes)。この結果、表2中に示すように、基準ルートBとコストパラメータチューニング前のナビゲーションルートとの一致率が80%、コストパラメータチューニング後の高速道コストパラメータ相対値が0.4、有料道コストパラメータ相対値が0.2、一般道コストパラメータ相対値が−0.1、一致率上昇値が10%となったものとする。
【0040】
そして、CPU11は、表2のように得られたユーザ走行ルートA−1,A−2および基準ルートBの高速道コストパラメータ相対値,有料道コストパラメータ相対値,一般道コストパラメータ相対値および一致率上昇値を用いて、表3に示すように、高速道コストパラメータ変動値,有料道コストパラメータ変動値,および一般道コストパラメータ変動値を算出する(ステップS110)。具体的には、高速道コストパラメータ変動値が(0.1×14−0.1×15+0.4×10)/(14+15+10)=0.1、有料道コストパラメータ変動値が(−0.1×14−0.2×15+0.2×10)/(14+15+10)=−0.06(小数点3桁以下を四捨五入)、一般道コストパラメータ変動値が(0×14−0×15+0.1×10)/(14+15+10)=−0.03(小数点3桁以下を四捨五入)として得られたものとする。ここでは、修正対象のコストパラメータについて、より一致率の高いコストパラメータ変動値を反映させるために、ユーザ走行ルートA−1,A−2および基準ルートBのそれぞれで決定された修正対象のコストパラメータ相対値に一致率上昇値で重み付けを行い、最終的なコストパラメータ変動値を算出している。
【0041】
【表3】
【0042】
次に、CPU11は、表1に示したコストパラメータチューニング前の高速道コストパラメータ0.4,有料道コストパラメータ0.8,および一般道コストパラメータ1に、表3に示した高速道コストパラメータ変動値0.1,有料道コストパラメータ変動値−0.06,および一般道コストパラメータ変動値−0.03をそれぞれ加算し、表4に示すようなコストパラメータチューニング後の高速道コストパラメータ0.5,有料道コストパラメータ0.74,および一般道コストパラメータ0.97を算出する(ステップS111)。
【0043】
【表4】
【0044】
続いて、CPU11は、図3(A)に示すユーザ走行ルートA−1に着目し(ステップS112)、同じ出発地aおよび目的地eを設定して、コストパラメータチューニング後の高速道コストパラメータ0.5,有料道コストパラメータ0.74,および一般道コストパラメータ0.97でルート探索処理を実行する(ステップS113)。ちなみに、図3(A)のユーザ走行ルートA−1のコストは、0.97×5+2×0.74+3×0.74+0.97×5=13.4となり、図3(B)のナビゲーションルートのコストは、0.97×5+5×0.5+2×0.5+0.97×5=13.2となり、図3(C)のナビゲーションルートのコストは、0.97×5+2×0.74+2×0.5+2×0.5+0.97×5=13.18となるので、図3(C)のナビゲーションルートが探索される。
【0045】
次に、CPU11は、図3(A)のユーザ走行ルートA−1とコストパラメータチューニング後のナビゲーションルートとの一致率を、ユーザ走行ルートA−1とコストパラメータチューニング後のナビゲーションルートとをそれぞれリンクごとに分割し、その中で一致しているリンク長と、ユーザ走行ルートA−1のリンク長との比率として計算する(ステップS114)。
【0046】
そして、CPU11は、図示しないユーザ走行ルートA−2についても、上述のような処理(ステップS112〜S114)を繰り返す(ステップS115でYes)。
【0047】
さらに、CPU11は、図示しない基準ルートBについても、上述のような処理(ステップS112〜S114)を繰り返す(ステップS115でYes)。
【0048】
次に、CPU11は、図3(A)のユーザ走行ルートA−1とコストパラメータチューニング後のナビゲーションルートとの一致率,ユーザ走行ルートA−2とコストパラメータチューニング後のナビゲーションルートとの一致率,および基準ルートBとコストパラメータチューニング後のナビゲーションルートとの一致率の平均値を、平均一致率として算出する(ステップS116)。
【0049】
そして、CPU11は、コストパラメータ変更回数が規定回数以内、かつ平均一致率が上昇であれば(ステップS117:YES)、ステップS101に制御を戻して、ステップS101〜S116を繰り返す。コストパラメータは一度のチューニングでは最適値にならないので、徐々に近づけていくために、繰り返し処理を行っている。
【0050】
コストパラメータ変更回数が規定回数より大きくなるか、または平均一致率が上昇しなくなると(ステップS117:NO)、CPU11は、その時点での高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータを最終的な高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータとして決定する(ステップS118)。
【0051】
なお、実施例1の動作の説明では、ユーザ走行ルートとして2つのユーザ走行ルートA−1およびA−2がユーザによって記憶され、基準ルートとして1つの基準ルートBがあらかじめ記憶されているものとしたが、ユーザ走行ルートおよび基準ルートの記憶数は任意であり、これらがどのような数であっても、本発明が同様に適用できることはいうまでもない。
【0052】
以上、本発明の実施例1を説明したが、これはあくまでも例示にすぎず、本発明はこれに限定されるものではなく、特許請求の範囲の趣旨を逸脱しない限りにおいて、当業者の知識に基づく種々の変更が可能である。例えば、実施例1では、コストパラメータを高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータの3種類としたが、それ以外の道路幅コストパラメータ,交差点コストパラメータ等のその他のコストパラメータを導入しても、本発明が同様に適用できることはいうまでもない。
【図面の簡単な説明】
【0053】
【図1】本発明の実施例1に係る車両用ナビゲーション装置の構成を示すブロック図。
【図2】本発明の実施例1に係るコストパラメータチューニング方法を示すフローチャート。
【図3】(A)はユーザ走行ルート、(B)はコストパラメータチューニング前のナビゲーションルート、(B)はコストパラメータチューニング後のナビゲーションルートをそれぞれ例示する図。
【符号の説明】
【0054】
1 車両用ナビゲーション装置
10 制御回路
2 位置検出器
33 外部メモリ
31 データ入力器
41 操作スイッチ群
43 リモコン端末
42 リモコンセンサ
51 表示装置
52 音声出力装置
S101 コストパラメータ取得ステップ
S102 チューニング対象ルート着目ステップ
S103 チューニング前ルート探索処理実行ステップ(チューニング前ルート探索処理実行手段)
S104 チューニング前一致率算出ステップ(チューニング前一致率算出手段)
S105 コストパラメータ相対値決定ステップ(コストパラメータ相対値決定手段)
S106 チューニング後ルート探索処理実行ステップ(チューニング後ルート探索処理実行手段)
S107 チューニング後一致率算出ステップ(チューニング後一致率算出手段)
S108 一致率上昇値算出ステップ(一致率上昇値算出手段)
S109 チューニング対象ルート有無判定ステップ
S110 コストパラメータ変動値算出ステップ(コストパラメータ変動値算出手段)
S111 コストパラメータ算出ステップ(コストパラメータ算出手段)
S112 チューニング対象ルート着目ステップ
S113 ルート探索処理実行ステップ
S114 一致率算出ステップ
S115 チューニング対象ルート有無判定ステップ
S116 平均一致率算出ステップ(平均一致率算出手段)
S117 変更回数/平均一致率判定ステップ
S118 コストパラメータ決定ステップ(コストパラメータ決定手段)
【特許請求の範囲】
【請求項1】
チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出するチューニング前一致率算出手段と、
前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出するチューニング後一致率算出手段と、
前記一致率の差から一致率上昇値を算出する一致率上昇値算出手段と、
前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとを比較してコストパラメータ相対値を決定するコストパラメータ相対値決定手段と、
前記コストパラメータ相対値および前記一致率上昇値を用いてコストパラメータ変動値を算出するコストパラメータ変動値算出手段と、
コストパラメータチューニング前のコストパラメータに対して前記コストパラメータ変動値を加算してコストパラメータチューニング後のコストパラメータを算出するチューニング後コストパラメータ算出手段と、
コストパラメータチューニング後の平均一致率を算出する平均一致率算出手段と、
前記平均一致率が上昇しなくなったときに、その時点でのコストパラメータチューニング後のコストパラメータを最終的なコストパラメータとして決定するコストパラメータ決定手段と
を有することを特徴とする車両用ナビゲーション装置。
【請求項2】
チューニング対象ルートと同じ出発地および目的地を設定して、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータでルート探索処理を実行するチューニング前ルート探索処理実行手段と、
前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出するチューニング前一致率算出手段と、
前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとを比較して高速道コストパラメータ相対値,有料道コストパラメータ相対値および一般道コストパラメータ相対値を決定するコストパラメータ相対値決定手段と、
前記チューニング対象ルートと同じ出発地および目的地を設定して、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータに対して高速道コストパラメータ相対値,有料道コストパラメータ相対値および一般道コストパラメータ相対値を加算したコストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータでルート探索処理を実行するチューニング後ルート探索処理実行手段と、
前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出するチューニング後一致率算出手段と、
前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率との差を、一致率上昇値として算出する一致率上昇値算出手段と、
高速道コストパラメータ相対値,有料道コストパラメータ相対値,一般道コストパラメータ相対値および一致率上昇値を用いて、高速道コストパラメータ変動値,有料道コストパラメータ変動値および一般道コストパラメータ変動値を算出するコストパラメータ変動値算出手段と、
コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータに対して高速道コストパラメータ変動値,有料道コストパラメータ変動値および一般道コストパラメータ変動値を加算して、コストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータを算出するコストパラメータ算出手段と、
前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率の平均を平均一致率として算出する平均一致率算出手段と、
前記平均一致率が上昇しなくなったときに、その時点でのコストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータを最終的な高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータとして決定するコストパラメータ決定手段と
を有することを特徴とする車両用ナビゲーション装置。
【請求項3】
前記チューニング対象ルートに、ユーザが任意に追加するユーザ走行ルートと、あらかじめ設定されている基準ルートとが含まれる請求項1または請求項2記載の車両用ナビゲーション装置。
【請求項4】
チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出する工程と、
前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出する工程と、
前記一致率の差から一致率上昇値を算出する工程と、
前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとを比較してコストパラメータ相対値を決定する工程と、
前記コストパラメータ相対値および前記一致率上昇値を用いてコストパラメータ変動値を算出する工程と、
コストパラメータチューニング前のコストパラメータに対して前記コストパラメータ変動値を加算してコストパラメータチューニング後のコストパラメータを算出する工程と、
コストパラメータチューニング後の平均一致率を算出する工程と、
前記平均一致率が上昇しなくなったときに、その時点でのコストパラメータチューニング後のコストパラメータを最終的なコストパラメータとして決定する工程と
を含むことを特徴とするコストパラメータチューニング方法。
【請求項5】
チューニング対象ルートと同じ出発地および目的地を設定して、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータでルート探索処理を実行する工程と、
前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出する工程と、
前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとを比較して高速道コストパラメータ相対値,有料道コストパラメータ相対値および一般道コストパラメータ相対値を決定する工程と、
前記チューニング対象ルートと同じ出発地および目的地を設定して、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータに対して高速道コストパラメータ相対値,有料道コストパラメータ相対値および一般道コストパラメータ相対値を加算したコストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータでルート探索処理を実行する工程と、
前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出する工程と、
前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率との差を、一致率上昇値として算出する工程と、
高速道コストパラメータ相対値,有料道コストパラメータ相対値,一般道コストパラメータ相対値および一致率上昇値を用いて、高速道コストパラメータ変動値,有料道コストパラメータ変動値および一般道コストパラメータ変動値を算出する工程と、
コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータに対して高速道コストパラメータ変動値,有料道コストパラメータ変動値および一般道コストパラメータ変動値を加算して、コストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータを算出する工程と、
前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率の平均を平均一致率として算出する工程と、
前記平均一致率が上昇しなくなったときに、その時点でのコストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータを最終的な高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータとして決定する工程と
を有することを特徴とするコストパラメータチューニング方法。
【請求項6】
前記チューニング対象ルートに、ユーザが任意に追加するユーザ走行ルートと、あらかじめ設定されている基準ルートとが含まれる請求項4または請求項5記載のコストパラメータチューニング方法。
【請求項1】
チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出するチューニング前一致率算出手段と、
前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出するチューニング後一致率算出手段と、
前記一致率の差から一致率上昇値を算出する一致率上昇値算出手段と、
前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとを比較してコストパラメータ相対値を決定するコストパラメータ相対値決定手段と、
前記コストパラメータ相対値および前記一致率上昇値を用いてコストパラメータ変動値を算出するコストパラメータ変動値算出手段と、
コストパラメータチューニング前のコストパラメータに対して前記コストパラメータ変動値を加算してコストパラメータチューニング後のコストパラメータを算出するチューニング後コストパラメータ算出手段と、
コストパラメータチューニング後の平均一致率を算出する平均一致率算出手段と、
前記平均一致率が上昇しなくなったときに、その時点でのコストパラメータチューニング後のコストパラメータを最終的なコストパラメータとして決定するコストパラメータ決定手段と
を有することを特徴とする車両用ナビゲーション装置。
【請求項2】
チューニング対象ルートと同じ出発地および目的地を設定して、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータでルート探索処理を実行するチューニング前ルート探索処理実行手段と、
前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出するチューニング前一致率算出手段と、
前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとを比較して高速道コストパラメータ相対値,有料道コストパラメータ相対値および一般道コストパラメータ相対値を決定するコストパラメータ相対値決定手段と、
前記チューニング対象ルートと同じ出発地および目的地を設定して、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータに対して高速道コストパラメータ相対値,有料道コストパラメータ相対値および一般道コストパラメータ相対値を加算したコストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータでルート探索処理を実行するチューニング後ルート探索処理実行手段と、
前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出するチューニング後一致率算出手段と、
前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率との差を、一致率上昇値として算出する一致率上昇値算出手段と、
高速道コストパラメータ相対値,有料道コストパラメータ相対値,一般道コストパラメータ相対値および一致率上昇値を用いて、高速道コストパラメータ変動値,有料道コストパラメータ変動値および一般道コストパラメータ変動値を算出するコストパラメータ変動値算出手段と、
コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータに対して高速道コストパラメータ変動値,有料道コストパラメータ変動値および一般道コストパラメータ変動値を加算して、コストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータを算出するコストパラメータ算出手段と、
前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率の平均を平均一致率として算出する平均一致率算出手段と、
前記平均一致率が上昇しなくなったときに、その時点でのコストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータを最終的な高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータとして決定するコストパラメータ決定手段と
を有することを特徴とする車両用ナビゲーション装置。
【請求項3】
前記チューニング対象ルートに、ユーザが任意に追加するユーザ走行ルートと、あらかじめ設定されている基準ルートとが含まれる請求項1または請求項2記載の車両用ナビゲーション装置。
【請求項4】
チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出する工程と、
前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出する工程と、
前記一致率の差から一致率上昇値を算出する工程と、
前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとを比較してコストパラメータ相対値を決定する工程と、
前記コストパラメータ相対値および前記一致率上昇値を用いてコストパラメータ変動値を算出する工程と、
コストパラメータチューニング前のコストパラメータに対して前記コストパラメータ変動値を加算してコストパラメータチューニング後のコストパラメータを算出する工程と、
コストパラメータチューニング後の平均一致率を算出する工程と、
前記平均一致率が上昇しなくなったときに、その時点でのコストパラメータチューニング後のコストパラメータを最終的なコストパラメータとして決定する工程と
を含むことを特徴とするコストパラメータチューニング方法。
【請求項5】
チューニング対象ルートと同じ出発地および目的地を設定して、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータでルート探索処理を実行する工程と、
前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率を算出する工程と、
前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとを比較して高速道コストパラメータ相対値,有料道コストパラメータ相対値および一般道コストパラメータ相対値を決定する工程と、
前記チューニング対象ルートと同じ出発地および目的地を設定して、コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータに対して高速道コストパラメータ相対値,有料道コストパラメータ相対値および一般道コストパラメータ相対値を加算したコストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータでルート探索処理を実行する工程と、
前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率を算出する工程と、
前記チューニング対象ルートとそのコストパラメータチューニング前のナビゲーションルートとの一致率と、前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率との差を、一致率上昇値として算出する工程と、
高速道コストパラメータ相対値,有料道コストパラメータ相対値,一般道コストパラメータ相対値および一致率上昇値を用いて、高速道コストパラメータ変動値,有料道コストパラメータ変動値および一般道コストパラメータ変動値を算出する工程と、
コストパラメータチューニング前の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータに対して高速道コストパラメータ変動値,有料道コストパラメータ変動値および一般道コストパラメータ変動値を加算して、コストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータを算出する工程と、
前記チューニング対象ルートとそのコストパラメータチューニング後のナビゲーションルートとの一致率の平均を平均一致率として算出する工程と、
前記平均一致率が上昇しなくなったときに、その時点でのコストパラメータチューニング後の高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータを最終的な高速道コストパラメータ,有料道コストパラメータおよび一般道コストパラメータとして決定する工程と
を有することを特徴とするコストパラメータチューニング方法。
【請求項6】
前記チューニング対象ルートに、ユーザが任意に追加するユーザ走行ルートと、あらかじめ設定されている基準ルートとが含まれる請求項4または請求項5記載のコストパラメータチューニング方法。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2006−337183(P2006−337183A)
【公開日】平成18年12月14日(2006.12.14)
【国際特許分類】
【出願番号】特願2005−162561(P2005−162561)
【出願日】平成17年6月2日(2005.6.2)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年12月14日(2006.12.14)
【国際特許分類】
【出願日】平成17年6月2日(2005.6.2)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]