
車両用ナビゲーション装置及びナビゲーション方法
【課題】標高データを含む地図データを利用して道路が傾斜していても車両の進行方向を的確に表示することができる車両用ナビゲーション装置を提供する。
【解決手段】道路地図及び道路の標高データを含む地図データを記憶したデータベースと、車両の出発地から目的地までの経路をデータベースから探索し、車両の進行方位を案内するガイド画像を生成するナビゲータと、車両の傾き角を検出する角度センサと、ガイド画像を表示する表示装置と、データベースから標高データを取得し進行先の道路の傾斜角を算出する算出部と、方位変更点から先の道路が所定の角度以上の傾斜角を有する場合に、道路の傾斜角と車両の傾き角に応じてガイド画像の進行方位の角度を補正する補正部と、を具備する。
【解決手段】道路地図及び道路の標高データを含む地図データを記憶したデータベースと、車両の出発地から目的地までの経路をデータベースから探索し、車両の進行方位を案内するガイド画像を生成するナビゲータと、車両の傾き角を検出する角度センサと、ガイド画像を表示する表示装置と、データベースから標高データを取得し進行先の道路の傾斜角を算出する算出部と、方位変更点から先の道路が所定の角度以上の傾斜角を有する場合に、道路の傾斜角と車両の傾き角に応じてガイド画像の進行方位の角度を補正する補正部と、を具備する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両運転者の前方視野領域に運転支援用のナビゲーション画像を表示する車両用ナビゲーション装置及びナビゲーション方法に関する。
【背景技術】
【0002】
目的地までの運転を支援する、いわゆる車両用ナビゲーション装置は、出発地又は現在地から目的地までの地図情報を車両に設けた液晶パネル等のディスプレイに表示するものである。また近年では、ナビゲーション用の地図情報を車両のフロントガラスに表示するヘッドアップデイスプレイ(以下、HUDと称す)を設け運転者の視認性を向上した装置もある。
【0003】
ところで従来のナビゲーション装置では、進行方向を案内する際に地図方位に基づいて表示するのが一般的である。しかし、HUDのように実景上に重ねて進行方向を表示したり、或いは液晶等のディスプレイ画面においてカメラ等で撮影した実景画像に進行方向を重ねて表示する場合は、道路状況によっては運転者に対して誤解を与えることがある。例えば、右折又は左折する先に陸橋(坂道)と平行して別の道路がある場合、進行方向を表示する矢印がどちらの道を指しているのか分からず、間違って走行することがある。
【0004】
特許文献1には、運転者の視野内に車両の進むべき方向を動画像の矢印で表示し、交通状況等に応じて矢印の表示態様を変更するようにした運転支援情報表示システムが開示されている。また特許文献2には、前方地図情報から進路誘導指標画像を生成し、指標画像を立体表示する移動体用進路誘導装置が開示されている。
【0005】
しかしながら、特許文献1,2の例では高低差の異なる道路が平行しているような場合、進行方向を示す矢印がどっちの道路を指しているのか判断するのが難しく、運転者に誤解を与えることがある。このため現在地からみた案内表示を最適化することはできない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−284458号公報
【特許文献2】特開2002−107161号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
従来の車両用ナビゲーション装置では、高低差の異なる道路が平行しているような場合に、進行方向を的確に指示することができず運転者に対して誤解を与えることがあり、案内表示を最適化することができなかった。
【0008】
本発明はこのような事情に鑑み、地図情報に予め道路の高さデータ(標高、海抜等)を付加し、この高さデータと車両に搭載された角度センサを用いて進行方向を案内表示することにより、進行方向を的確に表示することができる車両用ナビゲーション装置及びナビゲーション方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
請求項1記載の車両用ナビゲーション装置は、道路地図及び道路の標高データを含む地図データを記憶したデータベースと、出発地及び目的地を入力するコマンド入力部と、前記出発地から目的地までの経路を前記データベースから探索し、車両の現在位置に応じて前記車両の進行方位を案内するガイド画像を含むナビゲーション画像を生成するナビゲータと、前記車両の傾き角を検出する角度センサを含み車両情報を生成する車両情報生成部と、前記ナビゲーション画像を表示する表示装置と、前記データベースから前記標高データを取得し、前記車両の方位変更点と前記方位変更点よりも進行先に設定した目標地点との標高差から進行先の道路の傾斜角を算出する算出部と、前記方位変更点から先の道路が所定の角度以上の傾斜角を有する場合、前記傾斜角と前記車両の傾き角に応じて前記ガイド画像の進行方位の角度を補正して前記表示装置に表示する補正部と、を具備したことを特徴とする。
【0010】
請求項6記載の車両用ナビゲーション方法は、道路地図及び道路の標高データを含む地図データを記憶したデータベースを備え、コマンド入力部によって入力した出発地から目的地までの経路を前記データベースから探索し、車両の現在位置に応じて前記車両の進行方位を案内するガイド画像を含むナビション画像を生成し、前記車両の傾き角を前記車両に搭載した角度センサで検出し、前記データベースから前記標高データを取得して、前記車両の方位変更点と前記方位変更点よりも進行先に設定した目標地点との標高差をもとに前記進行先の道路の傾斜角を算出し、前記方位変更点から先の道路が所定の角度以上の傾斜角を有し、前記傾斜角と前記車両の傾き角との差分が所定の閾値以上のときに前記ガイド画像の進行方位の角度を前記傾斜角に応じて補正し、前記補正したガイド画像を含むナビゲーション画像を表示装置に表示することを特徴とする。
【発明の効果】
【0011】
本発明の車両用ナビゲーション装置によれば、車両の進路を示すガイド画像の方位矢印を進行先の道路の傾斜に応じて補正することにより、運転者に対して適切に進行方向を案内することができる。また車両の傾き角に応じて方位矢印を補正するため、より正確に進行方向を案内することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施形態に係る車両用ナビゲーション装置の全体構成を示すブロック図。
【図2】表示装置の構成を示すブロック図。
【図3】表示装置(HUD)の光学系を示す構成図。
【図4】表示されたナビゲーション画像の一例を示す説明図。
【図5】ガイド画像(矢印)の補正を説明する説明図。
【図6】ガイド画像(矢印)の他の表示例を示す説明図。
【図7】ガイド画像の各種の表示例を示す説明図。
【図8】車両の傾きによって変化するガイド画像の表示例を示す説明図。
【図9】車両の進行によって変化するガイド画像の表示例を示す説明図。
【図10】車両の進行先の標高が異なる場合の補正角の算出方法を示す説明図。
【図11】車両の進行と標高差によって変化するガイド画像の表示例を示す説明図。
【図12】車両の進行方向の方位角が90度以外のときのガイド画像の表示例を示す説明図。
【図13】車両の進行方向の方位角が90度以外で傾斜しているときのガイド画像の表示例を示す説明図。
【図14】道路状況が異なる状態でのガイド画像の表示例を示す説明図。
【図15】道路状況が異なる状態でのガイド画像の他の表示例を示す説明図。
【図16】ガイド画像を動画表示する例を示す説明図。
【図17】ガイド画像の方位角度の補正処理の動作を示すフローチャート。
【発明を実施するための形態】
【0013】
以下、この発明の一実施形態について図面を参照して説明する。
【実施例1】
【0014】
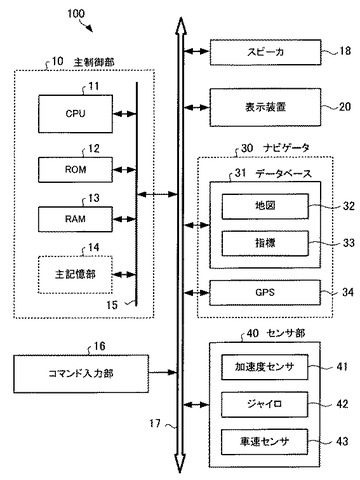
図1は、本発明の一実施形態に係る車両用ナビゲーション装置の全体構成を示すブロック図である。車両用ナビゲーション装置100は、車両の運転者を対象として、任意の出発地から目的地に至る経路に沿ってナビゲーション画像を表示するもので、主制御部10、コマンド入力部16、スピーカ18、表示装置20、ナビゲータ30、センサ部40を含み、バスライン17によって互いに接続されている。
【0015】
主制御部10は、CPU11、ROM12、RAM13、主記憶部14を含むコンピュータシステムであり、バスライン15を介して互いに接続されている。CPU11は、ROM12に格納されたプログラムにしたがって、ナビゲーション装置100の全体の動作を制御し、表示装置20にナビゲーション用の画像を表示する。RAM13は、CPU11の制御のもとに各種の演算結果を記憶する。
【0016】
コマンド入力部16は、操作ボタン(図示せず)を有し、運転者の操作によってナビゲーションを指示するコマンド、例えば出発地と目的地の情報を入力するものである。尚、コマンド入力部16は、ディスプレイをタッチするタッチパネル式のものであってもよい。
【0017】
スピーカ18は、音声によって進行方向などを報知する。表示装置20は、車両のダッシュボード中央部に配置された液晶ディスプレイ等の表示器であり、地図情報、経路案内情報、現在位置等のナビゲーション画像を表示する。また表示装置20としてヘッドアップディスプレイ(HUD)を用いることもできる。HUDは、例えば車両ダッシュボードの運転席に対応する位置に配置されたプロジェクターであり、運転席前方のフロントガラスに画像を投影するものである(詳細は後述する)。
【0018】
ナビゲータ30は、データベース31とGPS34を含み、データベース31は、地図データベース32と、指標データベース33を有している。地図データベース32には地図データが記憶されている。地図データとしては、全国の道路地図や地域情報のほかに、道路地図の各ポイントの高さ情報(標高、海抜)が含まれている。地域情報としては、地域名(県名、都市名など)や、道路名、鉄道等や、各交差点間の距離等の情報が含まれている。
【0019】
指標データベース33には、予め設定された経路案内サービス用の指標が道路地図と対応付けて記憶されている。指標は、運転者が交差点等を視認する際の目標物となるものであり、建築物(役所、学校、図書館、駅、美術館等)、店舗、モニュメント、ポスト、バス停等のマークや名前が記憶されている。
【0020】
GPS(Global Positioning System )34は、アンテナ(図示せず)によって複数のGPS衛星から送信された信号を受信し、その信号に基づいて車両の現在位置情報を取得する。GPS34による現在位置の測定技術は、一般のナビゲーションシステムで使用されているため詳細な説明は省略する。
【0021】
センサ部40は車両情報を得るためのもので、例えば加速度センサ41、ジャイロ42、車速センサ43等を含む。加速度センサ41は、車両の移動に伴う進行方向の加速度を測定し、ジャイロ42は、車両のピッチ方向の傾き(ε)及びロール方向の傾き(σ)を測定する。加速度センサ41とジャイロ42は、車両の移動に合わせて傾き角を検出する角度センサを構成する。車速センサ43は、車両の速度を測定するものであり、測定した車両の速度情報は、所定距離を走行する際の所要時間の算出等に利用される。
【0022】
尚、主制御部10の主記憶部14は、GPS34が搭載されていない場合に使用されるもので、車両情報(例えば車両の移動距離、移動速度、進行方向等の情報)を基に現在位置を算出する際の各種の情報を記憶する。
【0023】
ナビゲータ30は、コマンド入力部16によって入力された出発地と目的地に基づいて経路を探索し、地図データベース32から経路上の地図データを取得する。地図データには緯度・経度のほかに高さ(標高)を表すデータが含まれており、入力された出発地と目的地間の経路を緯度経度によって特定する。また経路上の高さを求める。
【0024】
またナビゲータ30は、探索した経路に存在する所定の指標を指標データベース33から抽出する。指標データベース33には、所定の指標が2次元地図での緯度経度と対応付けて記憶されているため、経路に存在する指標(例えば学校、郵便局、市役所等のマークや建物名、道路名など)を抽出して表示することができる。
【0025】
さらにナビゲータ30は、現在位置に応じて車両を経路に沿って誘導する各種のガイド画像を作成する。例えば、交差点での進行方位を案内する「直進」,「右折」,「左折」といったガイド画像(矢印)を生成する。また主制御部10と協働して、現在位置と次の交差点までの距離情報や進行先の道路の方位や高さ情報をもとに矢印の角度を補正する。またナビゲータ30は、GPS34で取得した車両の現在位置の情報と、探索した経路の緯度経度情報とを比較し、車両が経路上のどの位置を走行しているかを検出して車両の現在位置を示す情報を生成する。
【0026】
こうして表示装置20には、2次元地図と、経路上の指標と、現在位置と、進行方向を示すガイド画像とを複合して表示することができる。
【0027】
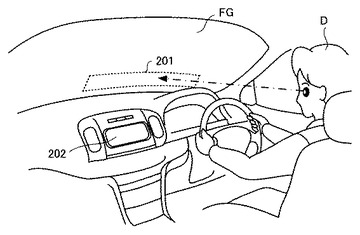
図2は、表示装置20の概要を示す図である。表示装置20は、ヘッドアップディスプレイ(HUD)を用いて運転席前方のフロントガラスFGにナビゲーション画像201を投影する。或いは、車両のダッシュボード中央部に配置されたLCDディスプレイ等の表示器202で構成される。
【0028】
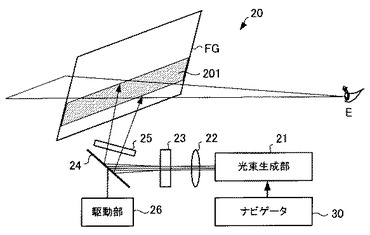
図3は、表示装置20としてHUDを用いた場合の光学系の構成図である。図3においてHUDは、光束生成部21、照射レンズ22、照射範囲を制御する光学レンズ23、照射位置を制御するミラー24、画像を拡大するレンズ25、ミラー24の角度を制御する駆動部26を含む。
【0029】
光束生成部21には、ナビゲータ30からのナビゲーション画像が供給され、光束生成部21は画像情報を表示する光束を出力する。光束は、照射レンズ22及び光学レンズ23を介してミラー24に照射される。ミラー24で反射した光束は、拡大レンズ25で拡大され、フロントガラスFGに投影される。
【0030】
投影された画像の表示範囲は、光学レンズ23によって制御することができ、照射位置はミラー24の角度を調整することによって制御することができる。駆動部26は、ミラー24の角度を調整するものである。尚、フロントガラスFGのナビゲーション画像201を表示する領域は、半透明な反射部材とすることで、運転手Dは投影された画像と前方の風景を視認することができる。
【0031】
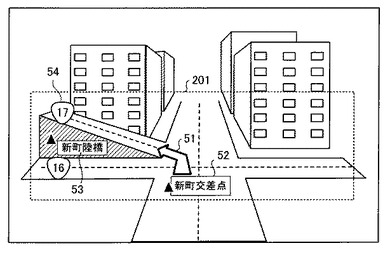
次に図4、図5を参照してナビゲーション画像の表示例を説明する。尚、以下の例では表示装置20としてHUDを用いた場合を説明する。図4は、フロントガラスに表示されたナビゲーション画像201の一例を示し、実景として、例えば車両の進行方向の前方に交差点とビルの間に延びる道路があり、左折方向に陸橋(坂道)と平坦な道路が平行に延びている状態を示している。(地図上の平面図で見たとき、陸橋(坂道)と平坦な道路は平行になる)。
【0032】
ナビゲーション画像201としては、例えば車両が進むべき進路を案内するガイド画像51(矢印)と、交差点名52と、陸橋の名前53、及び道路名54が表示される。尚、以下の説明ではガイド画像51を矢印51と呼ぶこともある。
【0033】
本発明では、進行方向に高低の異なる2本の道路が平行に延びているような場合に、運転者に対して車両が進むべき方向を矢印51で案内するが、道路が傾斜している場合、傾斜角に応じて矢印51の角度を補正する点に特徴がある。
【0034】
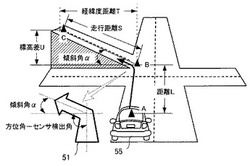
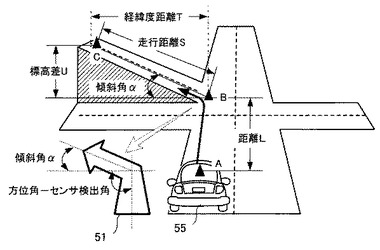
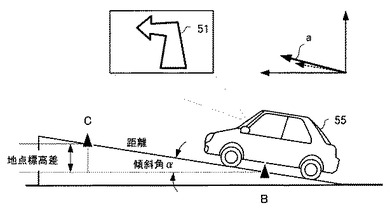
図5は、車両55が交差点の手前にさしかかった状態を示しており、太線で示すようにA点からB点(方位変更点)を経てC点に至る経路で進行するものとし、交差点(B点)を左折して坂道の道路(C点)に進む場合を例示している。
【0035】
このとき、車両55と方位変更点(B点)までの距離をL、坂道の傾斜角をα、方位変更点(B点)とその進行先に設定した目標地点(C点)との標高差をUとし、B点からC点までの地図上の経緯度の距離をT、走行距離をSとしている。傾斜角αは、経緯度の距離Tと車両の走行距離Sと標高差Uをもとに主制御部10で算出する。主制御部10は、進行先の道路の傾斜角αを算出する算出部を構成する。
【0036】
直行した交差点を車両が右・左折する場合、地図上の方位角は90度であるため、通常ではガイド画像(矢印51)は直角(90度)で示されるが、進行経路上の道路が傾斜している場合、矢印51は、傾斜角α分だけ補正され鈍角で表示される。即ち、矢印51の表示角度は、次の(1)式で補正される。
表示角度=(方位角−センサ検出角a)+傾斜角α …(1)
ここで、センサ検出角aは、ジャイロ42で検出した車両55の傾き角を示す。センサ検出角a(ピッチ角ε、ロール角σ)がゼロであれば、方位角(90度)に道路の傾斜角αが加算された角度で矢印51の角度が補正される。図5では、表示装置20に表示されたガイド画像51を拡大して示している。
【0037】
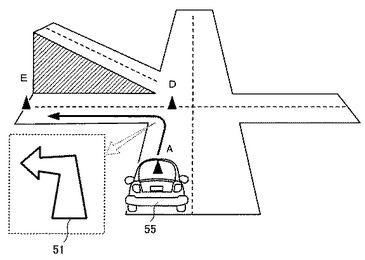
一方、図6で示すように、A点からD点を経てE点に至る場合(太線)は、交差点で左折して平坦な道路へ進むため、傾斜角αはゼロとなり、ガイド画像(矢印51)は方位角(90度)に相当する角度で表示される。
【0038】
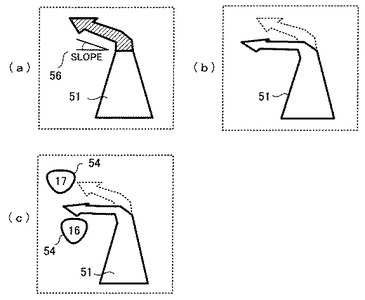
また図4のような交差点でのガイド画像51の表示形態としては、図7(a)で示すように、角度の補正に加えて進行方向の道路が傾斜していることを示すシンボル56(SCOPE)を表示したり、矢印51の先端の色を変えて表示しても良い。また高低の異なる道路が平行して場合には、図7(b)で示すように進むべき道路を強調して表示し、他方(点線)を薄く表示して区別してもよい。或いは図7(c)で示すように、(b)の表示に加えて道路名54を合わせて表示してもよい。
【0039】
こうして、運転者が視覚的に識別可能な形態でガイド画像51を表示することにより運転者に適切に進行方位を案内することができる。尚、ガイド画像51の方位矢印を傾斜角α及びセンサ検出角aに応じて補正するのは、主制御部10がセンサ部40と協働して行うため、主制御部10はガイド画像51を補正する補正部を構成する。
【0040】
図8は、ジャイロ42によって車両の傾き角が検出されたときのガイド画像51の表示を説明する図である。即ち、検出された車両の傾きをセンサ検出角a(ピッチ角εに相当)とすると、センサ検出角aと進行中の道路の傾斜角αの差が所定の閾値以下である場合は、ガイド画像51の補正は行わない。
【0041】
つまり、図8の例では、車両がB点を通過してC点に向かうと、上り坂になるため車両が傾き、ジャイロ42によるセンサ検出角aは、道路の傾斜角αに近似し傾斜角αとの差が所定の閾値以下になる。したがって、車両は経路に沿って正しくC点に向かって左折したことになる。このため、ガイド画像51の補正は解除され通常通りの表示に戻る訳である。
【0042】
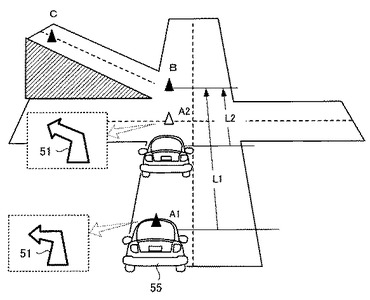
図9は、ガイド画像51の他の表示形態を示す説明図である。図9では、方位変更点が近づくに従って表示を変える例を示している。即ち、前方の交差点で左折して陸橋(坂道)へ至る経路を辿る場合であって、途中のA点とB点間の標高差がほとんど無い状態を例示している。
【0043】
この例では、方位変更点(B点)から所定の距離(L1)離れている地点A1では90度に曲がった矢印51を表示する。これにより次の交差点を左折することを事前に運転者に知らせることができる。そして、交差点に所定の距離(L2)まで近づいた地点A2で矢印51の角度を傾斜角α分だけ補正して表示する。これにより運転者に対して傾斜した道路へ左折すべきであると知らせることができる。
【0044】
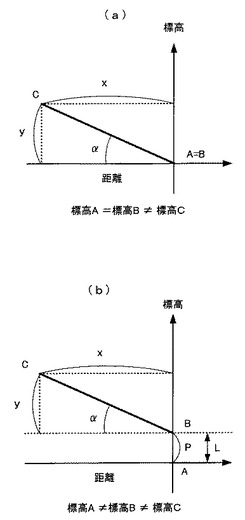
図10は、ガイド画像51の補正角(つまり方位角90度に加算される傾斜角αに相当)の算出方法を示す説明図である。図10(a)の縦軸は進行地点Cの標高を示し、横軸は距離を示している。車両の位置Aと方位変更点Bとの標高差がほぼ等しく、C点とB点間の標高差をyとし、B点からC点までの経緯度距離をxとすると、補正角αは、
α=tan−1(y/x)…(2)
で求めることができる。
【0045】
図10(b)は、車両(位置Aで示す)が方位変更点Bの手前(距離L)にいる状態を示している。A点からB点間に標高差Pがあり、C点とB点間の標高差をyとし、B点からC点までの経緯度距離をxとすると、補正角αは前述した(2)式で求められる。この例では、ジャイロ42によるセンサ検出角a(ピッチ角ε、ロール角σ)があるため、(1)式から分かるように、補正角αがセンサ検出角a分だけ修正される。但し、センサ検出角aが所定の閾値以下の場合は誤差と見做して修正は行わない。
【0046】
またA点からB点までの標高の違いを示すピッチ角βは、
β=tan−1(P/L)…(3)
で求めることができる。さらにジャイロ42で検出したピッチ角をεとしたとき、運転者から表示画面201までの焦点距離をFとすると、画像移動距離Mを、
M=F×tan(β+ε)…(4)
で求めることができる。(4)式で算出した画像移動距離Mに応じてナビゲーション画像201の表示位置をシフトすれば、運転者に見やすいナビゲーション画像を提示することができる。
【0047】
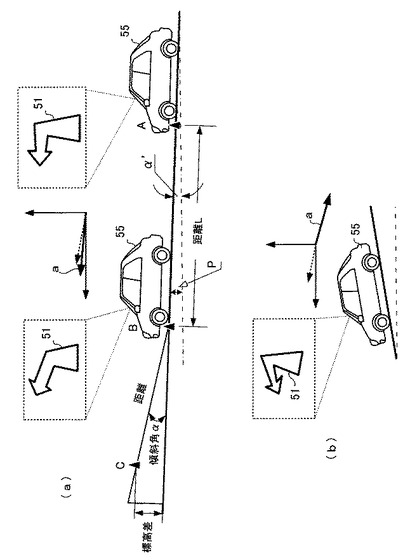
図11(a)は、図10(b)で示すようにA点とB点との間(距離L)に標高差Pがあるときのガイド画像51の表示形態を示す説明図である。この例ではA点からB点までに標高差Pがある。しかしセンサ検出角aは僅か(センサ検出角a≒水平)であり、標高差Pによる傾斜角α’も小さいため、ガイド画像51の補正は行わない。つまりA点からB点間のように傾斜角α’が傾斜判定の閾値よりも小さい場合は矢印51の補正は行わない。
【0048】
一方、B点に近付くとセンサ検出角aは小さい(センサ検出角a≒水平)が、進行先の傾斜角αが大きくなるため、(1)式に基づきガイド画像51の補正を行う。つまり傾斜角αが傾斜判定の閾値よりも大きいため矢印51の角度を変えて表示する。
【0049】
図11(b)は、センサ検出角a≠水平で、車両が進行方向に向かって下っている場合のガイド画像51の補正を示す説明図である。この例では車両が下っているため、センサ検出角aが大きく方向が逆(−)になる。このため(1)式に基づきガイド画像51が補正され、補正角αにセンサ検出角aが加算されて修正され、鋭角に補正される。
【0050】
例えば、図11(a)において、B点からC点(陸橋)に向かうべきところを側道(図6のD点からE点)に左折し、D点からE点に向かって下り坂になっている場合、矢印51は図11(b)のように鋭角に補正される。したがって、運転者は進路を間違ったことに気が付く。
【0051】
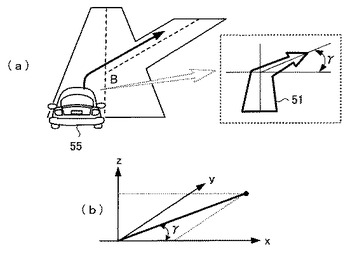
次に車両の進行方向の方位角が90度以外の場合のガイド画像51の表示について説明する。図12(a)は、車両55が標高差のないY字路を右折する場合のガイド画像51を示している。この場合、(b)に示す地図上の横軸xと縦軸yのベクトルから、ガイド画像51の補正角γは、
γ=tan−1{y/(x+k)} kは定数 …(6)
で求めることができる。車両のセンサ検出角aとしてロール角σ(横揺れ)が検出された場合は、ロール角σを補正角γに加算すると良い。
【0052】
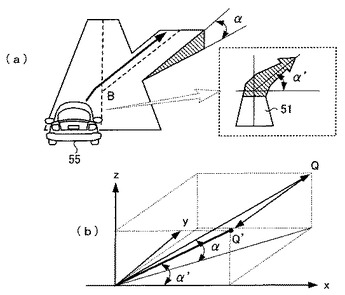
図13(a)は、車両55が標高差のあるY字路を右折する場合のガイド画像51を示している。この場合、右折先の道路が傾斜しているので、(b)に示す地図上の横軸xと縦軸yだけでなくz軸(高さ)のベクトルも関係する。このため傾斜角αの算出は求めにくくなる。そこで、方位変更点BからN(m)先の地点座標Qをxz面へ正射影した座標点Q’の補正角α’を算出する。α’は、
α’=tan−1(z/x) …(7)
で求められる。α’≒αであるため補正角αは、α’を流用することで算出が容易になる。車両のセンサ検出角としてロール角σが検出された場合は、ロール角σを補正角α’に加算すると良い。こうして車両の進行方向の方位角が90度以外の場合でも矢印51の方位角を適切に補正することができる。
【0053】
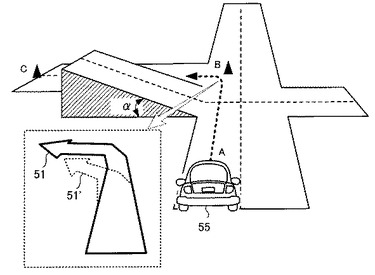
図14は、道路状況が異なる状態でのガイド画像51の表示形態を示す説明図である。図14は、車両の進行方向の前方に交差点があり、左折方向に傾斜角αの陸橋(坂道)があり、陸橋の奥側に平坦な道路が陸橋と平行に延びている。また車両55が交差点の手前にさしかかり、A点からB点を経てC点に至る経路(太線)で進行する場合を例示している。
【0054】
このときのナビゲーション画像201としては、例えば車両が進むべき進路を案内するガイド画像(直角に曲がった太い矢印51)を表示し、手前の坂道に向かう矢印が点線51’で表示される。したがって、運転者は自車が進むべき道が坂道ではなく、奥側に左折する道路であると知ることができる。
【0055】
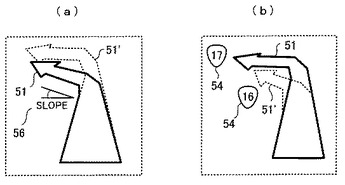
また、図14において手前側の道路(坂道)に進行する場合は、図15(a)に示すように、傾斜角αに応じて角度が補正されたガイド画像51(太い矢印51)を表示し、奥側の平坦道路に向かう矢印が点線51’で表示される。したがって、運転者は自車が進むべき道が手前の坂道へ左折する道路であると知ることができる。
【0056】
このように、高低の異なる道路が平行にある場合に、進むべき進路を強調して表示し他方を薄く(点線)表示して区別することで、運転者に進行方向を的確に指示することができる。尚、ガイド画像51の他の表示形態としては、図15(a)で示すように、角度の補正に加えて進行方向の道路が傾斜していることを示すシンボル56(SCOPE)を表示したり、或いは矢印の先端の色を変えて表示してもよい。また図15(b)で示すように、道路名54を合わせて表示してもよい。
【0057】
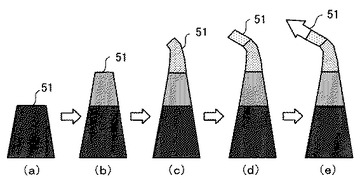
またガイド画像51の表示形態として、図16に示すように進行方向を動画として表示してもよい。即ち、図16の(a)〜(e)の順に長さ(及び色)が変化するガイド画像51を繰り返し表示すれば、動画として表示することができる。
【0058】
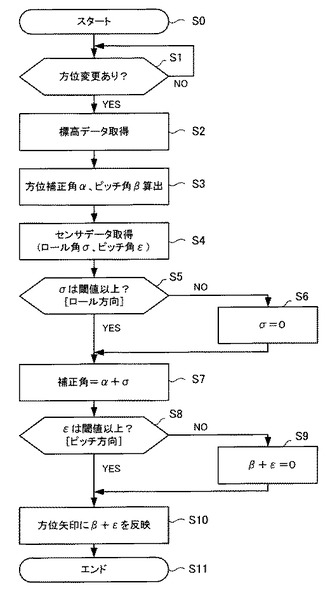
図17は、ガイド画像51の角度補正の動作を示すフローチャートである。ステップS0で動作がスタートすると、ステップS1では次案内として車両の方位変更があるか否かを判断する。方位変更がある場合はステップS2に進み、現在位置、方位変更点、方位変更点からN(m)先についてのそれぞれの標高データを地図データベース32から取得する。
【0059】
ステップS3では、方位補正角αとピッチ角βを(2)式、(3)式から算出する。次のステップS4では、センサ部40からのデータをもとに車両のロール角σとピッチ角εを取得する。ステップS5では走行道路に対してロール方向のセンサ検出角(ロール角σ)が閾値以上か否かを判断する。ロール角σが閾値以下であれば、ステップS6でσ=0に設定しステップS7に進む。またステップS5でロール角σが閾値以上であればステップ7に進む。
【0060】
ステップS7ではガイド画像51の矢印の補正角を(α+σ)に補正する。さらにステップS8では、走行道路に対してピッチ方向のセンサ検出角(ピッチ角ε)が閾値以上か否かを判断する。ピッチ角εが閾値以下であれば、ステップS9で(β+ε=0)に設定しステップS10に進む。またステップS8でピッチ角εが閾値以上であればステップ10に進む。ステップS10ではガイド画像51の方位矢印に(β+ε)を反映させて矢印の角度を補正し、ステップS11で終了する。
【0061】
以上説明したように本発明の実施形態によれば、進路を示すガイド画像の方位矢印を進行先の道路の傾斜に応じて補正することにより、運転者に対して適切に進行方向を案内することができる。またセンサ部によって測定したセンサ検出角をもとに車両の傾きに応じて方位矢印を修正するため、より正確に進行方向を案内することができる。
【0062】
尚、本発明の実施形態は、以上説明した構成に限定されるものではなく、特許請求の範囲を逸脱しない範囲内で種々の変形が可能である。
【符号の説明】
【0063】
100…ナビゲーション装置
10…主制御部
11…CPU
12…ROM
13…RAM
14…主制御部
15、17…バスライン
16…コマンド入力部
18…スピーカ
20…表示装置
201…ナビゲーション画像
202…表示器
30…ナビゲータ
31…データベース
32…地図データベース
33…指標データベース
34…GPS
40…センサ部
41…加速度センサ
42…ジャイロ
43…車速センサ
【技術分野】
【0001】
本発明は、車両運転者の前方視野領域に運転支援用のナビゲーション画像を表示する車両用ナビゲーション装置及びナビゲーション方法に関する。
【背景技術】
【0002】
目的地までの運転を支援する、いわゆる車両用ナビゲーション装置は、出発地又は現在地から目的地までの地図情報を車両に設けた液晶パネル等のディスプレイに表示するものである。また近年では、ナビゲーション用の地図情報を車両のフロントガラスに表示するヘッドアップデイスプレイ(以下、HUDと称す)を設け運転者の視認性を向上した装置もある。
【0003】
ところで従来のナビゲーション装置では、進行方向を案内する際に地図方位に基づいて表示するのが一般的である。しかし、HUDのように実景上に重ねて進行方向を表示したり、或いは液晶等のディスプレイ画面においてカメラ等で撮影した実景画像に進行方向を重ねて表示する場合は、道路状況によっては運転者に対して誤解を与えることがある。例えば、右折又は左折する先に陸橋(坂道)と平行して別の道路がある場合、進行方向を表示する矢印がどちらの道を指しているのか分からず、間違って走行することがある。
【0004】
特許文献1には、運転者の視野内に車両の進むべき方向を動画像の矢印で表示し、交通状況等に応じて矢印の表示態様を変更するようにした運転支援情報表示システムが開示されている。また特許文献2には、前方地図情報から進路誘導指標画像を生成し、指標画像を立体表示する移動体用進路誘導装置が開示されている。
【0005】
しかしながら、特許文献1,2の例では高低差の異なる道路が平行しているような場合、進行方向を示す矢印がどっちの道路を指しているのか判断するのが難しく、運転者に誤解を与えることがある。このため現在地からみた案内表示を最適化することはできない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−284458号公報
【特許文献2】特開2002−107161号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
従来の車両用ナビゲーション装置では、高低差の異なる道路が平行しているような場合に、進行方向を的確に指示することができず運転者に対して誤解を与えることがあり、案内表示を最適化することができなかった。
【0008】
本発明はこのような事情に鑑み、地図情報に予め道路の高さデータ(標高、海抜等)を付加し、この高さデータと車両に搭載された角度センサを用いて進行方向を案内表示することにより、進行方向を的確に表示することができる車両用ナビゲーション装置及びナビゲーション方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
請求項1記載の車両用ナビゲーション装置は、道路地図及び道路の標高データを含む地図データを記憶したデータベースと、出発地及び目的地を入力するコマンド入力部と、前記出発地から目的地までの経路を前記データベースから探索し、車両の現在位置に応じて前記車両の進行方位を案内するガイド画像を含むナビゲーション画像を生成するナビゲータと、前記車両の傾き角を検出する角度センサを含み車両情報を生成する車両情報生成部と、前記ナビゲーション画像を表示する表示装置と、前記データベースから前記標高データを取得し、前記車両の方位変更点と前記方位変更点よりも進行先に設定した目標地点との標高差から進行先の道路の傾斜角を算出する算出部と、前記方位変更点から先の道路が所定の角度以上の傾斜角を有する場合、前記傾斜角と前記車両の傾き角に応じて前記ガイド画像の進行方位の角度を補正して前記表示装置に表示する補正部と、を具備したことを特徴とする。
【0010】
請求項6記載の車両用ナビゲーション方法は、道路地図及び道路の標高データを含む地図データを記憶したデータベースを備え、コマンド入力部によって入力した出発地から目的地までの経路を前記データベースから探索し、車両の現在位置に応じて前記車両の進行方位を案内するガイド画像を含むナビション画像を生成し、前記車両の傾き角を前記車両に搭載した角度センサで検出し、前記データベースから前記標高データを取得して、前記車両の方位変更点と前記方位変更点よりも進行先に設定した目標地点との標高差をもとに前記進行先の道路の傾斜角を算出し、前記方位変更点から先の道路が所定の角度以上の傾斜角を有し、前記傾斜角と前記車両の傾き角との差分が所定の閾値以上のときに前記ガイド画像の進行方位の角度を前記傾斜角に応じて補正し、前記補正したガイド画像を含むナビゲーション画像を表示装置に表示することを特徴とする。
【発明の効果】
【0011】
本発明の車両用ナビゲーション装置によれば、車両の進路を示すガイド画像の方位矢印を進行先の道路の傾斜に応じて補正することにより、運転者に対して適切に進行方向を案内することができる。また車両の傾き角に応じて方位矢印を補正するため、より正確に進行方向を案内することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施形態に係る車両用ナビゲーション装置の全体構成を示すブロック図。
【図2】表示装置の構成を示すブロック図。
【図3】表示装置(HUD)の光学系を示す構成図。
【図4】表示されたナビゲーション画像の一例を示す説明図。
【図5】ガイド画像(矢印)の補正を説明する説明図。
【図6】ガイド画像(矢印)の他の表示例を示す説明図。
【図7】ガイド画像の各種の表示例を示す説明図。
【図8】車両の傾きによって変化するガイド画像の表示例を示す説明図。
【図9】車両の進行によって変化するガイド画像の表示例を示す説明図。
【図10】車両の進行先の標高が異なる場合の補正角の算出方法を示す説明図。
【図11】車両の進行と標高差によって変化するガイド画像の表示例を示す説明図。
【図12】車両の進行方向の方位角が90度以外のときのガイド画像の表示例を示す説明図。
【図13】車両の進行方向の方位角が90度以外で傾斜しているときのガイド画像の表示例を示す説明図。
【図14】道路状況が異なる状態でのガイド画像の表示例を示す説明図。
【図15】道路状況が異なる状態でのガイド画像の他の表示例を示す説明図。
【図16】ガイド画像を動画表示する例を示す説明図。
【図17】ガイド画像の方位角度の補正処理の動作を示すフローチャート。
【発明を実施するための形態】
【0013】
以下、この発明の一実施形態について図面を参照して説明する。
【実施例1】
【0014】
図1は、本発明の一実施形態に係る車両用ナビゲーション装置の全体構成を示すブロック図である。車両用ナビゲーション装置100は、車両の運転者を対象として、任意の出発地から目的地に至る経路に沿ってナビゲーション画像を表示するもので、主制御部10、コマンド入力部16、スピーカ18、表示装置20、ナビゲータ30、センサ部40を含み、バスライン17によって互いに接続されている。
【0015】
主制御部10は、CPU11、ROM12、RAM13、主記憶部14を含むコンピュータシステムであり、バスライン15を介して互いに接続されている。CPU11は、ROM12に格納されたプログラムにしたがって、ナビゲーション装置100の全体の動作を制御し、表示装置20にナビゲーション用の画像を表示する。RAM13は、CPU11の制御のもとに各種の演算結果を記憶する。
【0016】
コマンド入力部16は、操作ボタン(図示せず)を有し、運転者の操作によってナビゲーションを指示するコマンド、例えば出発地と目的地の情報を入力するものである。尚、コマンド入力部16は、ディスプレイをタッチするタッチパネル式のものであってもよい。
【0017】
スピーカ18は、音声によって進行方向などを報知する。表示装置20は、車両のダッシュボード中央部に配置された液晶ディスプレイ等の表示器であり、地図情報、経路案内情報、現在位置等のナビゲーション画像を表示する。また表示装置20としてヘッドアップディスプレイ(HUD)を用いることもできる。HUDは、例えば車両ダッシュボードの運転席に対応する位置に配置されたプロジェクターであり、運転席前方のフロントガラスに画像を投影するものである(詳細は後述する)。
【0018】
ナビゲータ30は、データベース31とGPS34を含み、データベース31は、地図データベース32と、指標データベース33を有している。地図データベース32には地図データが記憶されている。地図データとしては、全国の道路地図や地域情報のほかに、道路地図の各ポイントの高さ情報(標高、海抜)が含まれている。地域情報としては、地域名(県名、都市名など)や、道路名、鉄道等や、各交差点間の距離等の情報が含まれている。
【0019】
指標データベース33には、予め設定された経路案内サービス用の指標が道路地図と対応付けて記憶されている。指標は、運転者が交差点等を視認する際の目標物となるものであり、建築物(役所、学校、図書館、駅、美術館等)、店舗、モニュメント、ポスト、バス停等のマークや名前が記憶されている。
【0020】
GPS(Global Positioning System )34は、アンテナ(図示せず)によって複数のGPS衛星から送信された信号を受信し、その信号に基づいて車両の現在位置情報を取得する。GPS34による現在位置の測定技術は、一般のナビゲーションシステムで使用されているため詳細な説明は省略する。
【0021】
センサ部40は車両情報を得るためのもので、例えば加速度センサ41、ジャイロ42、車速センサ43等を含む。加速度センサ41は、車両の移動に伴う進行方向の加速度を測定し、ジャイロ42は、車両のピッチ方向の傾き(ε)及びロール方向の傾き(σ)を測定する。加速度センサ41とジャイロ42は、車両の移動に合わせて傾き角を検出する角度センサを構成する。車速センサ43は、車両の速度を測定するものであり、測定した車両の速度情報は、所定距離を走行する際の所要時間の算出等に利用される。
【0022】
尚、主制御部10の主記憶部14は、GPS34が搭載されていない場合に使用されるもので、車両情報(例えば車両の移動距離、移動速度、進行方向等の情報)を基に現在位置を算出する際の各種の情報を記憶する。
【0023】
ナビゲータ30は、コマンド入力部16によって入力された出発地と目的地に基づいて経路を探索し、地図データベース32から経路上の地図データを取得する。地図データには緯度・経度のほかに高さ(標高)を表すデータが含まれており、入力された出発地と目的地間の経路を緯度経度によって特定する。また経路上の高さを求める。
【0024】
またナビゲータ30は、探索した経路に存在する所定の指標を指標データベース33から抽出する。指標データベース33には、所定の指標が2次元地図での緯度経度と対応付けて記憶されているため、経路に存在する指標(例えば学校、郵便局、市役所等のマークや建物名、道路名など)を抽出して表示することができる。
【0025】
さらにナビゲータ30は、現在位置に応じて車両を経路に沿って誘導する各種のガイド画像を作成する。例えば、交差点での進行方位を案内する「直進」,「右折」,「左折」といったガイド画像(矢印)を生成する。また主制御部10と協働して、現在位置と次の交差点までの距離情報や進行先の道路の方位や高さ情報をもとに矢印の角度を補正する。またナビゲータ30は、GPS34で取得した車両の現在位置の情報と、探索した経路の緯度経度情報とを比較し、車両が経路上のどの位置を走行しているかを検出して車両の現在位置を示す情報を生成する。
【0026】
こうして表示装置20には、2次元地図と、経路上の指標と、現在位置と、進行方向を示すガイド画像とを複合して表示することができる。
【0027】
図2は、表示装置20の概要を示す図である。表示装置20は、ヘッドアップディスプレイ(HUD)を用いて運転席前方のフロントガラスFGにナビゲーション画像201を投影する。或いは、車両のダッシュボード中央部に配置されたLCDディスプレイ等の表示器202で構成される。
【0028】
図3は、表示装置20としてHUDを用いた場合の光学系の構成図である。図3においてHUDは、光束生成部21、照射レンズ22、照射範囲を制御する光学レンズ23、照射位置を制御するミラー24、画像を拡大するレンズ25、ミラー24の角度を制御する駆動部26を含む。
【0029】
光束生成部21には、ナビゲータ30からのナビゲーション画像が供給され、光束生成部21は画像情報を表示する光束を出力する。光束は、照射レンズ22及び光学レンズ23を介してミラー24に照射される。ミラー24で反射した光束は、拡大レンズ25で拡大され、フロントガラスFGに投影される。
【0030】
投影された画像の表示範囲は、光学レンズ23によって制御することができ、照射位置はミラー24の角度を調整することによって制御することができる。駆動部26は、ミラー24の角度を調整するものである。尚、フロントガラスFGのナビゲーション画像201を表示する領域は、半透明な反射部材とすることで、運転手Dは投影された画像と前方の風景を視認することができる。
【0031】
次に図4、図5を参照してナビゲーション画像の表示例を説明する。尚、以下の例では表示装置20としてHUDを用いた場合を説明する。図4は、フロントガラスに表示されたナビゲーション画像201の一例を示し、実景として、例えば車両の進行方向の前方に交差点とビルの間に延びる道路があり、左折方向に陸橋(坂道)と平坦な道路が平行に延びている状態を示している。(地図上の平面図で見たとき、陸橋(坂道)と平坦な道路は平行になる)。
【0032】
ナビゲーション画像201としては、例えば車両が進むべき進路を案内するガイド画像51(矢印)と、交差点名52と、陸橋の名前53、及び道路名54が表示される。尚、以下の説明ではガイド画像51を矢印51と呼ぶこともある。
【0033】
本発明では、進行方向に高低の異なる2本の道路が平行に延びているような場合に、運転者に対して車両が進むべき方向を矢印51で案内するが、道路が傾斜している場合、傾斜角に応じて矢印51の角度を補正する点に特徴がある。
【0034】
図5は、車両55が交差点の手前にさしかかった状態を示しており、太線で示すようにA点からB点(方位変更点)を経てC点に至る経路で進行するものとし、交差点(B点)を左折して坂道の道路(C点)に進む場合を例示している。
【0035】
このとき、車両55と方位変更点(B点)までの距離をL、坂道の傾斜角をα、方位変更点(B点)とその進行先に設定した目標地点(C点)との標高差をUとし、B点からC点までの地図上の経緯度の距離をT、走行距離をSとしている。傾斜角αは、経緯度の距離Tと車両の走行距離Sと標高差Uをもとに主制御部10で算出する。主制御部10は、進行先の道路の傾斜角αを算出する算出部を構成する。
【0036】
直行した交差点を車両が右・左折する場合、地図上の方位角は90度であるため、通常ではガイド画像(矢印51)は直角(90度)で示されるが、進行経路上の道路が傾斜している場合、矢印51は、傾斜角α分だけ補正され鈍角で表示される。即ち、矢印51の表示角度は、次の(1)式で補正される。
表示角度=(方位角−センサ検出角a)+傾斜角α …(1)
ここで、センサ検出角aは、ジャイロ42で検出した車両55の傾き角を示す。センサ検出角a(ピッチ角ε、ロール角σ)がゼロであれば、方位角(90度)に道路の傾斜角αが加算された角度で矢印51の角度が補正される。図5では、表示装置20に表示されたガイド画像51を拡大して示している。
【0037】
一方、図6で示すように、A点からD点を経てE点に至る場合(太線)は、交差点で左折して平坦な道路へ進むため、傾斜角αはゼロとなり、ガイド画像(矢印51)は方位角(90度)に相当する角度で表示される。
【0038】
また図4のような交差点でのガイド画像51の表示形態としては、図7(a)で示すように、角度の補正に加えて進行方向の道路が傾斜していることを示すシンボル56(SCOPE)を表示したり、矢印51の先端の色を変えて表示しても良い。また高低の異なる道路が平行して場合には、図7(b)で示すように進むべき道路を強調して表示し、他方(点線)を薄く表示して区別してもよい。或いは図7(c)で示すように、(b)の表示に加えて道路名54を合わせて表示してもよい。
【0039】
こうして、運転者が視覚的に識別可能な形態でガイド画像51を表示することにより運転者に適切に進行方位を案内することができる。尚、ガイド画像51の方位矢印を傾斜角α及びセンサ検出角aに応じて補正するのは、主制御部10がセンサ部40と協働して行うため、主制御部10はガイド画像51を補正する補正部を構成する。
【0040】
図8は、ジャイロ42によって車両の傾き角が検出されたときのガイド画像51の表示を説明する図である。即ち、検出された車両の傾きをセンサ検出角a(ピッチ角εに相当)とすると、センサ検出角aと進行中の道路の傾斜角αの差が所定の閾値以下である場合は、ガイド画像51の補正は行わない。
【0041】
つまり、図8の例では、車両がB点を通過してC点に向かうと、上り坂になるため車両が傾き、ジャイロ42によるセンサ検出角aは、道路の傾斜角αに近似し傾斜角αとの差が所定の閾値以下になる。したがって、車両は経路に沿って正しくC点に向かって左折したことになる。このため、ガイド画像51の補正は解除され通常通りの表示に戻る訳である。
【0042】
図9は、ガイド画像51の他の表示形態を示す説明図である。図9では、方位変更点が近づくに従って表示を変える例を示している。即ち、前方の交差点で左折して陸橋(坂道)へ至る経路を辿る場合であって、途中のA点とB点間の標高差がほとんど無い状態を例示している。
【0043】
この例では、方位変更点(B点)から所定の距離(L1)離れている地点A1では90度に曲がった矢印51を表示する。これにより次の交差点を左折することを事前に運転者に知らせることができる。そして、交差点に所定の距離(L2)まで近づいた地点A2で矢印51の角度を傾斜角α分だけ補正して表示する。これにより運転者に対して傾斜した道路へ左折すべきであると知らせることができる。
【0044】
図10は、ガイド画像51の補正角(つまり方位角90度に加算される傾斜角αに相当)の算出方法を示す説明図である。図10(a)の縦軸は進行地点Cの標高を示し、横軸は距離を示している。車両の位置Aと方位変更点Bとの標高差がほぼ等しく、C点とB点間の標高差をyとし、B点からC点までの経緯度距離をxとすると、補正角αは、
α=tan−1(y/x)…(2)
で求めることができる。
【0045】
図10(b)は、車両(位置Aで示す)が方位変更点Bの手前(距離L)にいる状態を示している。A点からB点間に標高差Pがあり、C点とB点間の標高差をyとし、B点からC点までの経緯度距離をxとすると、補正角αは前述した(2)式で求められる。この例では、ジャイロ42によるセンサ検出角a(ピッチ角ε、ロール角σ)があるため、(1)式から分かるように、補正角αがセンサ検出角a分だけ修正される。但し、センサ検出角aが所定の閾値以下の場合は誤差と見做して修正は行わない。
【0046】
またA点からB点までの標高の違いを示すピッチ角βは、
β=tan−1(P/L)…(3)
で求めることができる。さらにジャイロ42で検出したピッチ角をεとしたとき、運転者から表示画面201までの焦点距離をFとすると、画像移動距離Mを、
M=F×tan(β+ε)…(4)
で求めることができる。(4)式で算出した画像移動距離Mに応じてナビゲーション画像201の表示位置をシフトすれば、運転者に見やすいナビゲーション画像を提示することができる。
【0047】
図11(a)は、図10(b)で示すようにA点とB点との間(距離L)に標高差Pがあるときのガイド画像51の表示形態を示す説明図である。この例ではA点からB点までに標高差Pがある。しかしセンサ検出角aは僅か(センサ検出角a≒水平)であり、標高差Pによる傾斜角α’も小さいため、ガイド画像51の補正は行わない。つまりA点からB点間のように傾斜角α’が傾斜判定の閾値よりも小さい場合は矢印51の補正は行わない。
【0048】
一方、B点に近付くとセンサ検出角aは小さい(センサ検出角a≒水平)が、進行先の傾斜角αが大きくなるため、(1)式に基づきガイド画像51の補正を行う。つまり傾斜角αが傾斜判定の閾値よりも大きいため矢印51の角度を変えて表示する。
【0049】
図11(b)は、センサ検出角a≠水平で、車両が進行方向に向かって下っている場合のガイド画像51の補正を示す説明図である。この例では車両が下っているため、センサ検出角aが大きく方向が逆(−)になる。このため(1)式に基づきガイド画像51が補正され、補正角αにセンサ検出角aが加算されて修正され、鋭角に補正される。
【0050】
例えば、図11(a)において、B点からC点(陸橋)に向かうべきところを側道(図6のD点からE点)に左折し、D点からE点に向かって下り坂になっている場合、矢印51は図11(b)のように鋭角に補正される。したがって、運転者は進路を間違ったことに気が付く。
【0051】
次に車両の進行方向の方位角が90度以外の場合のガイド画像51の表示について説明する。図12(a)は、車両55が標高差のないY字路を右折する場合のガイド画像51を示している。この場合、(b)に示す地図上の横軸xと縦軸yのベクトルから、ガイド画像51の補正角γは、
γ=tan−1{y/(x+k)} kは定数 …(6)
で求めることができる。車両のセンサ検出角aとしてロール角σ(横揺れ)が検出された場合は、ロール角σを補正角γに加算すると良い。
【0052】
図13(a)は、車両55が標高差のあるY字路を右折する場合のガイド画像51を示している。この場合、右折先の道路が傾斜しているので、(b)に示す地図上の横軸xと縦軸yだけでなくz軸(高さ)のベクトルも関係する。このため傾斜角αの算出は求めにくくなる。そこで、方位変更点BからN(m)先の地点座標Qをxz面へ正射影した座標点Q’の補正角α’を算出する。α’は、
α’=tan−1(z/x) …(7)
で求められる。α’≒αであるため補正角αは、α’を流用することで算出が容易になる。車両のセンサ検出角としてロール角σが検出された場合は、ロール角σを補正角α’に加算すると良い。こうして車両の進行方向の方位角が90度以外の場合でも矢印51の方位角を適切に補正することができる。
【0053】
図14は、道路状況が異なる状態でのガイド画像51の表示形態を示す説明図である。図14は、車両の進行方向の前方に交差点があり、左折方向に傾斜角αの陸橋(坂道)があり、陸橋の奥側に平坦な道路が陸橋と平行に延びている。また車両55が交差点の手前にさしかかり、A点からB点を経てC点に至る経路(太線)で進行する場合を例示している。
【0054】
このときのナビゲーション画像201としては、例えば車両が進むべき進路を案内するガイド画像(直角に曲がった太い矢印51)を表示し、手前の坂道に向かう矢印が点線51’で表示される。したがって、運転者は自車が進むべき道が坂道ではなく、奥側に左折する道路であると知ることができる。
【0055】
また、図14において手前側の道路(坂道)に進行する場合は、図15(a)に示すように、傾斜角αに応じて角度が補正されたガイド画像51(太い矢印51)を表示し、奥側の平坦道路に向かう矢印が点線51’で表示される。したがって、運転者は自車が進むべき道が手前の坂道へ左折する道路であると知ることができる。
【0056】
このように、高低の異なる道路が平行にある場合に、進むべき進路を強調して表示し他方を薄く(点線)表示して区別することで、運転者に進行方向を的確に指示することができる。尚、ガイド画像51の他の表示形態としては、図15(a)で示すように、角度の補正に加えて進行方向の道路が傾斜していることを示すシンボル56(SCOPE)を表示したり、或いは矢印の先端の色を変えて表示してもよい。また図15(b)で示すように、道路名54を合わせて表示してもよい。
【0057】
またガイド画像51の表示形態として、図16に示すように進行方向を動画として表示してもよい。即ち、図16の(a)〜(e)の順に長さ(及び色)が変化するガイド画像51を繰り返し表示すれば、動画として表示することができる。
【0058】
図17は、ガイド画像51の角度補正の動作を示すフローチャートである。ステップS0で動作がスタートすると、ステップS1では次案内として車両の方位変更があるか否かを判断する。方位変更がある場合はステップS2に進み、現在位置、方位変更点、方位変更点からN(m)先についてのそれぞれの標高データを地図データベース32から取得する。
【0059】
ステップS3では、方位補正角αとピッチ角βを(2)式、(3)式から算出する。次のステップS4では、センサ部40からのデータをもとに車両のロール角σとピッチ角εを取得する。ステップS5では走行道路に対してロール方向のセンサ検出角(ロール角σ)が閾値以上か否かを判断する。ロール角σが閾値以下であれば、ステップS6でσ=0に設定しステップS7に進む。またステップS5でロール角σが閾値以上であればステップ7に進む。
【0060】
ステップS7ではガイド画像51の矢印の補正角を(α+σ)に補正する。さらにステップS8では、走行道路に対してピッチ方向のセンサ検出角(ピッチ角ε)が閾値以上か否かを判断する。ピッチ角εが閾値以下であれば、ステップS9で(β+ε=0)に設定しステップS10に進む。またステップS8でピッチ角εが閾値以上であればステップ10に進む。ステップS10ではガイド画像51の方位矢印に(β+ε)を反映させて矢印の角度を補正し、ステップS11で終了する。
【0061】
以上説明したように本発明の実施形態によれば、進路を示すガイド画像の方位矢印を進行先の道路の傾斜に応じて補正することにより、運転者に対して適切に進行方向を案内することができる。またセンサ部によって測定したセンサ検出角をもとに車両の傾きに応じて方位矢印を修正するため、より正確に進行方向を案内することができる。
【0062】
尚、本発明の実施形態は、以上説明した構成に限定されるものではなく、特許請求の範囲を逸脱しない範囲内で種々の変形が可能である。
【符号の説明】
【0063】
100…ナビゲーション装置
10…主制御部
11…CPU
12…ROM
13…RAM
14…主制御部
15、17…バスライン
16…コマンド入力部
18…スピーカ
20…表示装置
201…ナビゲーション画像
202…表示器
30…ナビゲータ
31…データベース
32…地図データベース
33…指標データベース
34…GPS
40…センサ部
41…加速度センサ
42…ジャイロ
43…車速センサ
【特許請求の範囲】
【請求項1】
道路地図及び道路の標高データを含む地図データを記憶したデータベースと、
出発地及び目的地を入力するコマンド入力部と、
前記出発地から目的地までの経路を前記データベースから探索し、車両の現在位置に応じて前記車両の進行方位を案内するガイド画像を含むナビゲーション画像を生成するナビゲータと、
前記車両の傾き角を検出する角度センサを含み車両情報を生成する車両情報生成部と、
前記ナビゲーション画像を表示する表示装置と、
前記データベースから前記標高データを取得し、前記車両の方位変更点と前記方位変更点よりも進行先に設定した目標地点との標高差から進行先の道路の傾斜角を算出する算出部と、
前記方位変更点から先の道路が所定の角度以上の傾斜角を有する場合、前記傾斜角と前記車両の傾き角に応じて前記ガイド画像の進行方位の角度を補正して前記表示装置に表示する補正部と、
を具備したことを特徴とする車両用ナビゲーション装置。
【請求項2】
前記補正部は、前記算出した道路の傾斜角と前記角度センサで検出した前記車両の傾き角との差分が所定の閾値以上のときに、前記ガイド画像の進行方位の角度を前記傾斜角に応じて補正することを特徴とする請求項1記載の車両用ナビゲーション装置。
【請求項3】
前記補正部は、前記角度センサで検出した前記車両の傾き角が予め設定した角度以上のとき、前記傾斜角に前記傾き角を含めて前記ガイド画像の角度補正を行うことを特徴とする請求項1記載の車両用ナビゲーション装置。
【請求項4】
前記補正部は、前記車両が前記方位変更点まで所定の距離以上離れているときは前記ガイド画像の角度補正を行わず、所定の距離以内に到達したときに前記ガイド画像の角度補正を行うことを特徴とする請求項1記載の車両用ナビゲーション装置。
【請求項5】
前記補正部は、前記ガイド画像の角度を補正し、かつ前記進行先の道路が傾斜していることを視覚的に識別可能な形態で表示することを特徴とする請求項1記載の車両用ナビゲーション装置。
【請求項6】
道路地図及び道路の標高データを含む地図データを記憶したデータベースを備え、コマンド入力部によって入力した出発地から目的地までの経路を前記データベースから探索し、
車両の現在位置に応じて前記車両の進行方位を案内するガイド画像を含むナビゲーション画像を生成し、
前記車両の傾き角を前記車両に搭載した角度センサで検出し、
前記データベースから前記標高データを取得して、前記車両の方位変更点と前記方位変更点よりも進行先に設定した目標地点との標高差をもとに前記進行先の道路の傾斜角を算出し、
前記方位変更点から先の道路が所定の角度以上の傾斜角を有し、前記傾斜角と前記車両の傾き角との差分が所定の閾値以上のときに前記ガイド画像の進行方位の角度を前記傾斜角に応じて補正し、
前記補正したガイド画像を含むナビゲーション画像を表示装置に表示することを特徴とする車両用ナビゲーション方法。
【請求項1】
道路地図及び道路の標高データを含む地図データを記憶したデータベースと、
出発地及び目的地を入力するコマンド入力部と、
前記出発地から目的地までの経路を前記データベースから探索し、車両の現在位置に応じて前記車両の進行方位を案内するガイド画像を含むナビゲーション画像を生成するナビゲータと、
前記車両の傾き角を検出する角度センサを含み車両情報を生成する車両情報生成部と、
前記ナビゲーション画像を表示する表示装置と、
前記データベースから前記標高データを取得し、前記車両の方位変更点と前記方位変更点よりも進行先に設定した目標地点との標高差から進行先の道路の傾斜角を算出する算出部と、
前記方位変更点から先の道路が所定の角度以上の傾斜角を有する場合、前記傾斜角と前記車両の傾き角に応じて前記ガイド画像の進行方位の角度を補正して前記表示装置に表示する補正部と、
を具備したことを特徴とする車両用ナビゲーション装置。
【請求項2】
前記補正部は、前記算出した道路の傾斜角と前記角度センサで検出した前記車両の傾き角との差分が所定の閾値以上のときに、前記ガイド画像の進行方位の角度を前記傾斜角に応じて補正することを特徴とする請求項1記載の車両用ナビゲーション装置。
【請求項3】
前記補正部は、前記角度センサで検出した前記車両の傾き角が予め設定した角度以上のとき、前記傾斜角に前記傾き角を含めて前記ガイド画像の角度補正を行うことを特徴とする請求項1記載の車両用ナビゲーション装置。
【請求項4】
前記補正部は、前記車両が前記方位変更点まで所定の距離以上離れているときは前記ガイド画像の角度補正を行わず、所定の距離以内に到達したときに前記ガイド画像の角度補正を行うことを特徴とする請求項1記載の車両用ナビゲーション装置。
【請求項5】
前記補正部は、前記ガイド画像の角度を補正し、かつ前記進行先の道路が傾斜していることを視覚的に識別可能な形態で表示することを特徴とする請求項1記載の車両用ナビゲーション装置。
【請求項6】
道路地図及び道路の標高データを含む地図データを記憶したデータベースを備え、コマンド入力部によって入力した出発地から目的地までの経路を前記データベースから探索し、
車両の現在位置に応じて前記車両の進行方位を案内するガイド画像を含むナビゲーション画像を生成し、
前記車両の傾き角を前記車両に搭載した角度センサで検出し、
前記データベースから前記標高データを取得して、前記車両の方位変更点と前記方位変更点よりも進行先に設定した目標地点との標高差をもとに前記進行先の道路の傾斜角を算出し、
前記方位変更点から先の道路が所定の角度以上の傾斜角を有し、前記傾斜角と前記車両の傾き角との差分が所定の閾値以上のときに前記ガイド画像の進行方位の角度を前記傾斜角に応じて補正し、
前記補正したガイド画像を含むナビゲーション画像を表示装置に表示することを特徴とする車両用ナビゲーション方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2011−7562(P2011−7562A)
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願番号】特願2009−149927(P2009−149927)
【出願日】平成21年6月24日(2009.6.24)
【出願人】(504113008)東芝アルパイン・オートモティブテクノロジー株式会社 (110)
【Fターム(参考)】
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願日】平成21年6月24日(2009.6.24)
【出願人】(504113008)東芝アルパイン・オートモティブテクノロジー株式会社 (110)
【Fターム(参考)】
[ Back to top ]