
車両用ナビゲーション装置
【課題】車両の方向転換(Uターン)が行われたか否かを精度良く判定して、方向転換が行われた場合には、車両が走行する道路上に車両マークを即座に表示すること。
【解決手段】車両がUターンを行った場合には、そのUターン開始前の進行方向とUターン終了後の進行方向とは、結果としてほぼ逆方向となる。従って、車両が進行方向の変化を開始した進行方向開始点を基準として不感帯エリアを設定し、その不感帯エリア進入位置におけるエリア進入方向及び退出位置におけるエリア退出進行方向に基づいて、車両がUターンしたか否かを簡便かつ精度良く判定することができる。
【解決手段】車両がUターンを行った場合には、そのUターン開始前の進行方向とUターン終了後の進行方向とは、結果としてほぼ逆方向となる。従って、車両が進行方向の変化を開始した進行方向開始点を基準として不感帯エリアを設定し、その不感帯エリア進入位置におけるエリア進入方向及び退出位置におけるエリア退出進行方向に基づいて、車両がUターンしたか否かを簡便かつ精度良く判定することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両が方向転換(Uターン)を行った場合でも、車両の現在位置を、車両が走行する道路上に即座に合わせ込むことが可能な車両用ナビゲーション装置に関する。
【背景技術】
【0002】
従来、カーナビゲーション装置において、車両の正確な現在位置を算出するために、マップマッチング処理が採用されることが一般的である。このマップマッチング処理では、まず、GPSなどを利用した電波航法、または車速センサ及び方位センサ(ジャイロスコープ、地磁気センサなど)からの検出信号に基づいて現在位置を累積的に推定する自立航法、さらにはこれら電波航法と自立航法とを組み合わせたハイブリッド航法により車両の現在位置を含む走行軌跡を求める。そして、その走行軌跡を、地図データベースに格納されている道路データとを比較することにより、車両が走行している道路を推定し、正しい車両の現在位置を求める。
【0003】
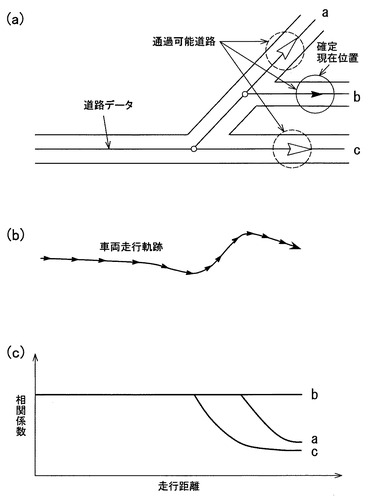
図7(a),(b),(c)に基づいて、マップマッチング処理の原理を簡単に説明する。例えば、車両が到達した交差点に接続するすべての道路を、車両が次に通行する可能性のある候補道路として選択する。図7(a)に示す例では、道路a,b,cが候補道路として選択される。こうして選択された候補道路の道路形状と車両の走行軌跡の形状(図7(b))との比較を行ない、その相関性の最も高い道路を車両が走行している道路とみなし、その道路上に車両位置を確定する。図7(c)に示す例では、道路bの相関性が最も高いため、車両は道路bを走行しているとみなし、道路b上に車両位置を確定する。このような処理を、一定時間あるいは車両が一定距離走行するごとに行ない、常に道路上に車両位置を確定していく。
【0004】
ここで、特許文献1には、車両がUターンしても、常に車両の進行方向に対応した道路情報を表示するナビゲーション装置が開示されている。このナビゲーション装置では、ビーコン送信機から送信される、分岐点までの距離などの道路情報や、渋滞、工事、規制等の交通情報の各種情報を受信し、進行方向に対応した主方向情報とその反対方向に対応した従方向情報とに分けて記憶する。そして、車速センサ、回転角センサ、方位センサなどの検出結果に基づいて、車両の回転半径を算出しつつ、現在位置周辺の道路地図を参照して、車両がUターンしたか否かを検出する。車両のUターンを検出すると、従方向情報として記憶されている情報を、表示器に表示する。
【特許文献1】特開平5−248881号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上述した特許文献1には、具体的なUターンの検出方法が記載されていないが、このUターンの検出は、実際のところ、技術的困難性が高い。なぜならば、電波航法、自立航法を問わず、算出される車両位置には多少の誤差が含まれる可能性があることに加え、マップマッチング処理では、車両が現在走行中の道路に接続された道路を走行することを前提にしているためである。
【0006】
このため、車両がUターンを行った場合、マップマッチング処理によって、車両の現在位置が誤った道路上に一致されてしまうことがある。このような場合、地図上において車両が正しい道路上の位置に復帰するには、車両がある程度の距離を走行して、マップマッチングを行うための走行軌跡データが蓄積される必要がある。
【0007】
本発明は、上述した点に鑑みてなされたものであり、車両の方向転換(Uターン)が行われたか否かを精度良く判定して、方向転換が行われた場合には、車両が走行する道路上に車両マークを即座に表示することが可能な車両用ナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、請求項1に記載の車両用ナビゲーション装置は、
少なくとも車両の現在位置及び進行方向を示す車両マーク及びその周辺の地図を表示する表示部と、
車両の現在位置及び進行方向を測定する測定手段と、
測定手段が測定する現在位置に基づいて、車両の走行軌跡を算出する走行軌跡算出手段と、
地図データを格納する地図データ格納手段と、
地図データ格納手段が格納する地図データにおける、車両の現在位置近傍の道路の形状と、走行軌跡算出手段が算出する走行軌跡の形状とを比較して、車両が走行している道路を決定するマップマッチング処理を実行するマップマッチング手段と、
マップマッチング手段によって決定された道路上に車両マークが位置するように、表示部に車両マークと周辺地図とを表示させる表示制御手段とを備えた車両用ナビゲーション装置であって、
車両の進行方向が変化したとき、その変化開始前の進行方向と、変化終了後の進行方向とに基づいて、車両が方向転換を行ったか否かを判定する方向転換判定手段を備え、
マップマッチング手段は、方向転換判定手段によって車両が方向転換を行ったと判定された場合、車両が進行方向変化前に走行していた道路を、車両が走行していると道路として決定することを特徴とする。
【0009】
ここで、車両が方向転換(Uターン)したか否かは、例えば、方位センサなどによって検出される車両の進行方向の変化の累積値がほぼ180°となったか否かに基づいて判定することが考えられる。
【0010】
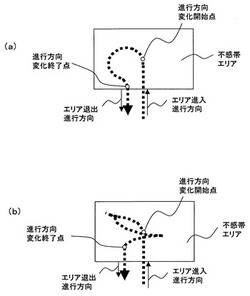
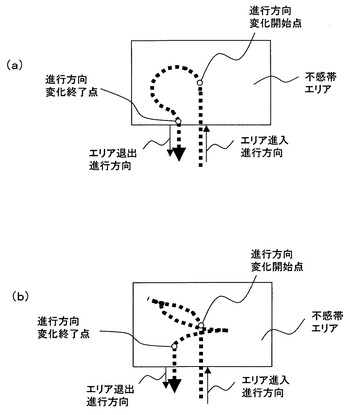
しかしながら、実際に車両が方向転換を行う場合、方向転換を行う道路の道幅が広ければ、図5(a)に示すように、方位センサによって検出される進行方向の変化の累積値が180°を大きく上回る場合がある。また、方向転換を行う道路の道幅が狭い場合には、図5(b)に示すように、車両の進行方向を逆転させて切り返しを行わなければならないこともある。このように、車両が方向転換する過程においては、180°を超えて進行方向を変化させたり、その進行方向を逆転させて切り返しを行ったりする。このため、その進行方向の変化途中の進行方向データに基づいて車両の方向転換の有無を判定することは困難性を伴う。
【0011】
このような点に鑑みて、請求項1に記載の車両用ナビゲーション装置では、車両の進行方向が変化したとき、その変化開始前の進行方向と、変化終了後の進行方向とに基づいて、車両の方向転換が行われたか否かを判定することとした。つまり、車両が方向転換する場合、その過程において車両の進行方向がどのように変化したかに係わらず、その方向転換開始前の進行方向と方向転換終了後の進行方向とは、結果としてほぼ逆方向となる。従って、請求項1に記載の車両用ナビゲーション装置のように、車両の進行方向変化開始前の進行方向と、変化終了後の進行方向とを用いることで、車両が方向転換したか否かを簡便かつ精度良く判定することができる。
【0012】
そして、方向転換判定手段によって車両が方向転換を行ったと判定された場合、マップマッチング手段が、車両が進行方向変化前に走行していた道路を、車両が走行していると道路として決定することで、車両が走行する道路上に車両マークを即座に表示することが可能になる。
【0013】
請求項2に記載したように、方向転換判定手段は、車両の進行方向の変化開始位置と変化終了位置との少なくとも一方を基準として、その進行方向に関するデータの採否を区別するための不感帯エリアを設定し、その不感帯エリアに車両が進入するときの進行方向を、変化開始前の進行方向とし、不感帯エリアから車両が退出するときの進行方向を、変化終了後の進行方向として、これらの進行方向に基づいて、車両が方向転換を行ったか否かを判定することができる。
【0014】
すなわち、車両の位置が不感帯エリア内に属している場合には、その位置における進行方向は、方向転換の判定に用いられることがなく、その不感帯エリアに対する進入及び退出時の進行方向が方向転換の判定に用いられるのである。この場合、不感帯エリアと車両位置とを比較することで、不感帯エリアへの進入位置及び退出位置を特定でき、それぞれの位置における進行方向を間単に抽出することができる。
【0015】
また、請求項3に記載したように、方向転換判定手段は、車両の進行方向の履歴を保存する保存手段を備え、車両が進行方向を変化させた場合、保存手段に保存されている、進行方向の変化を開始する前の進行方向と、進行方向の変化を終了した後の進行方向とを抽出し、これらの進行方向に基づいて、車両が方向転換を行ったか否かを判定するようにしても良い。このようにしても、進行方向変化開始前の進行方向と、変化終了後の進行方向とを簡単に抽出して、車両が方向転換を行ったか否かを簡単に判定することができる。
【0016】
なお、請求項4に記載したように、方向転換判定手段は、変化開始前の進行方向と変化終了後の進行方向とが、逆方向とみなすことが可能な所定の角度範囲に属するときに、車両が方向転換を行ったと判定することが好ましい。道路が片側複数車線からなる場合などは、車両が方向転換を行った場合であっても、その進行方向は、正確に180°だけ逆向きになるとは限らない。従って、変化開始前の進行方向と変化終了後の進行方向とが、逆方向とみなすことが可能な所定の角度範囲に属することを条件として、方向転換したと判定することが好ましい。
【0017】
請求項5に記載したように、方向転換判定手段は、マップマッチング手段が車両が走行している道路を決定できないことを、車両が方向転換を行ったと判定する一条件としても良い。
【0018】
同一道路の対向車線同士は、基本的に同一の道路データによって示されるので、対向車線間は、道路データによって接続されることはない。このため、車両が方向転換を行った場合、通常、マップマッチング手段が、車両の現在位置を一致させるべき道路を探索することになり、このような道路の探索中は、車両が走行している道路を決定できない状態となる。従って、マップマッチング手段が車両が走行している道路を決定できないことを、車両が方向転換を行ったと判定する一条件とすることで、方向転換の判定精度を高めることができる。
【発明を実施するための最良の形態】
【0019】
以下、本発明の実施形態における車両用ナビゲーション装置に関して、図面に基づいて説明する。図1は、本実施形態に係わる車両用ナビゲーション装置の概略構成を示すブロック図である。
【0020】
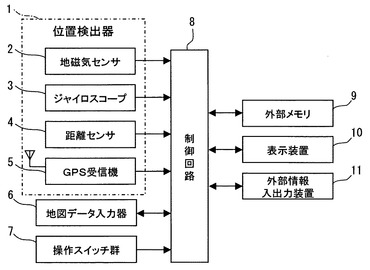
同図に示すように、本実施形態のカーナビゲーション装置は、位置検出器1、地図データ入力器6、操作スイッチ群7、これらの接続された制御回路8、制御回路8に接続された外部メモリ9、表示装置10及び外部情報入出力装置11などを備えている。
【0021】
制御回路8は通常のコンピュータとして構成されており、内部には周知のCPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインが備えられている。ROMには、制御回路8が実行するためのプログラムが書き込まれており、このプログラムに従ってCPU等が所定の演算処理を実行する。
【0022】
位置検出器1は、いずれも周知の地磁気センサ2、ジャイロスコープ3、距離センサ4、及び衛星からの電波に基づいて車両の位置を測定するGPS(Global Positioning System)のためのGPS受信機5を有している。これらは、各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。すなわち、GPSによる電波航法と、地磁気センサ、ジャイロスコープ3及び距離センサ4による自立航法を組み合わせたハイブリッド航法により、車両の現在位置に関するデータ(現在位置座標及び進行方向)を測定する。なお、各センサの精度によっては、位置検出器1を上述した内の一部で構成してもよく、更に、図示しないステアリングの回転センサ、各転動輪の車速センサ等を用いてもよい。
【0023】
地図データ入力器6は、道路データ、背景データ及び文字データを含む地図データを入力するための装置である。地図データを記憶する記憶媒体としては、そのデータ量からCD−ROMまたはDVD−ROMを用いるのが一般的であるが、メモリカード、ハードディスク等を用いてもよい。
【0024】
また、地図データは、外部のサーバから通信によって取得し、後述する外部メモリ9などに格納することも可能である。この場合、外部メモリ9に格納された地図データを用いて、車両周辺の地図表示、表示地図の尺度変更、経路案内等の各種のナビゲーション機能を実施することができる。これらの機能は、主に制御回路8によって各種の演算処理がなされることによって実行される。
【0025】
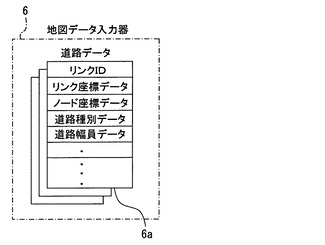
ここで、道路データの構成の一例について図2を用いて説明する。図2に示すように、道路データ6aは、道路毎に固有の番号を付したリンクID、リンク座標データ、ノード座標データ、高速道路や国道等の道路種別を示す道路種別データ、道路幅員データ等の各データから構成されている。道路データ6aにおけるリンクとは、地図上の各道路を、交差点、分岐点などを示すノードにより複数に分割し、2つのノード間をリンクとして規定したものである。そして、リンク座標データには、このリンクの始端と終端の座標が記述される。なお、リンクの途中にノードが含まれる場合には、ノード座標データにノード座標が記述される。この道路データ6aは、地図を表示する以外に、マップマッチング処理を行う際の道路の形状を与えるために用いられたり、目的地までの案内経路を検索する際に用いられる。ただし、案内経路の検索に関しては、別途、案内経路として用いるべき各道路の接続関係を示す道路ネットワークデータを用意し、そのネットワークデータを用いて検索するようにしても良い。
【0026】
背景データは、図示していないが、地図上の各施設や地形等と、それに対応する地図上の座標を関連付けたデータとして構成している。なお、施設に関しては、その施設に関連付けて電話番号や、住所等のデータも記憶されている。この目印データは、後述する外部メモリ9に記憶されているものであってもよい。また、文字データは、地名、施設名、道路名等を地図上に表示するものであって、その表示すべき位置に対応する座標データと関連付けて記憶されている。
【0027】
上述したように、各道路は、基本的に一本のリンクによって表現される。従って、従来は、車両が方向転換(Uターン)を行った場合、マップマッチング処理によって、車両の位置を即座にそのUターンを行った道路上に一致させることができない場合があった。これは、上述したように、マップマッチング処理が、接続されているリンク形状と車両の走行軌跡の形状との一致度によって車両が走行している道路を決定するのに対し、一本の道路における対向車線同士は、リンクを介して接続されていないためである。
【0028】
操作スイッチ群7は、例えば、後述する表示装置10と一体になったタッチスイッチもしくはメカニカルなスイッチ等が用いられ、各種入力に使用される。例えば、操作スイッチ群7を用いて、目的地の位置を入力することが可能であり、この場合、ナビゲーション装置は、現在位置からその目的地までの最適な経路を自動的に選択して案内経路を形成し表示する、いわゆる経路案内機能を備えている。このような自動的に最適な経路を設定する手法は、周知のダイクストラ法等の手法が知られている。また、操作スイッチ群7を用いて、例えば、所望の施設の住所、施設名称、電話番号等を入力することが可能であり、この場合、ナビゲーション装置は、その入力されて施設の位置等を検索する検索機能も備えている。
【0029】
外部メモリ9は、例えば、メモリカードやハードディスク等の記憶媒体からなる。この外部メモリ9には、ユーザによって記憶されたテキストデータ、画像データ、音声データ等の各種データが記憶される。さらに、車両用ナビゲーション装置が、上述したように、地図データを外部のサーバから取得する場合には、その地図データを格納したりする。
【0030】
表示装置10は、例えば、液晶ディスプレイによって構成され、表示装置10の画面には車両の現在位置に対応しつつ、その進行方向を表示する自車両マーク、及び、地図データ入力器6より入力された地図データによって生成される車両周辺の道路地図を表示することができる。さらに、目的地が設定された場合、この道路地図上には、現在位置から目的地までの誘導経路を重ねて表示することが出来る。
【0031】
外部情報入出力装置11は、道路に敷設されたビーコンや各地のFM放送局を介して、VICSセンタから配信される道路交通情報等の情報を受信したり、必要に応じて車両側から外部へ情報を送信したりする装置である。受信した情報は、制御回路8で処理され、例えば、渋滞情報や規制情報等は表示装置10に表示される道路地図上に重ねて表示される。
【0032】
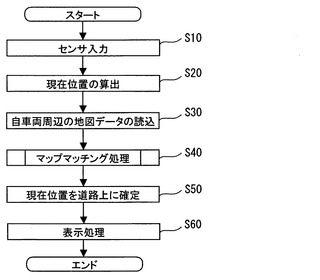
次に、本発明の特徴である、マップマッチング処理を行いつつ、表示装置10に車両の現在位置及び進行方向を示す自車両マーク及びその周辺の道路地図を表示する処理について、図3及び図4のフローチャートを用いて説明する。なお、図3は、マップマッチング処理を用いて車両が走行する道路を決定して、その道路上に自車両マークを表示するためのメインルーチンを示し、図4は、図3のフローチャートにおけるマップマッチング処理の詳細を示すものである。また、図3及び図4に示す処理は、例えば、所定時間経過するごとに、若しくは車両が所定距離走行するごとに繰返し実行される。
【0033】
図3に示すように、まず、ステップS10において、位置検出器1の各センサなどからの信号が入力され、ステップS20において、入力された信号に基づいて、車両の現在位置を算出する。このとき、GPS受信器5による位置データは、上述の道路データの座標データ(緯度と経度)と同じ形態で取得される。また、地磁気センサ2、ジャイロスコープ3、距離センサ4によって自車両の進行方向及び走行距離に関するデータが取得され、過去に算出、もしくは確定された車両位置を基準として、現在位置の座標データの算出を行う(自立航法による座標データの算出)。なお、現在位置は、基本的には、自立航法により算出された座標データに基づいて求められる。ただし、GPS受信器5による位置データが取得されている場合には、両者を比較し、その差が所定距離以上である場合には、現在位置として、GPS受信器5による位置データを採用する。
【0034】
続いて、ステップS30では、ステップS20にて算出された車両の現在位置の座標に基づいて、車両周辺の地図データの読み込みを行う。次に、ステップS40において、マップマッチング処理を行う。このマップマッチング処理では、詳しくは後述するが、例えば、ステップS20にて算出した現在位置と所定距離以内の道路、もしくは既に道路上にマッチングされている場合には、そのマッチング道路に接続された道路を車両が走行する可能性のある道路として特定する。そして、ステップS10にて過去に算出された複数個の現在位置と最新の現在位置とを連結して、走行軌跡の形状データを算出する。その走行軌跡の形状データと、車両が走行する可能性のある道路の形状とを比較して、最も相関の高い道路を車両が走行している道路と決定(推定)する。
【0035】
なお、ステップS20における現在位置の算出、及び上述した走行軌跡の算出は、GPS受信機5の位置データのみから行っても良いし、自立航法の位置データのみから行っても良い。
【0036】
マップマッチング処理によって車両が走行している道路が決定されると、ステップS50において、上述した走行軌跡の形状をその道路に当てはめることによって、車両の現在位置を確定する。このように、車両の現在位置が確定された場合には、その後、その確定位置を基準として自立航法による位置データが算出される。そして、ステップS60において、確定された現在位置に対応する位置に、車両の進行方向を示す自車両マークを表示しつつ、その周辺の道路地図を表示するための表示データを作成し、その表示データを用いて、自車両マーク及び周辺道路地図を表示装置10に表示する。
【0037】
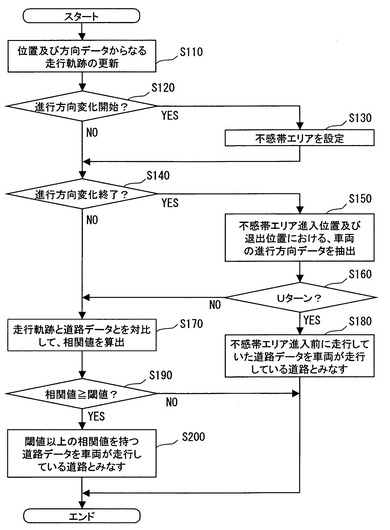
次に、図4のフローチャートに基づいて、マップマッチング処理の詳細について説明する。まず、ステップS110では、ステップS20にて算出された現在位置に基づいて、位置及び方向データからなる走行軌跡データを更新する。そして、ステップS120において、更新された走行軌跡データに基づいて、車両の進行方向の変化が開始されたか否かを判定する。この判定処理において、車両の進行方向の変化が開始されたと判定されると、ステップS130において、その進行方向変化開始点を基準として不感帯エリアを設定する。この不感帯エリアは、例えば、図5(a)、(b)に示すように、進行方向変化開始点から車両がUターンを行った場合に、そのUターン時の走行軌跡が含まれるように、進行方向変化開始点を中心として設定される。
【0038】
ステップS140では、更新された走行軌跡データに基づいて、車両の進行方向の変化が終了したか否かを判定する。この判定処理において、車両の進行方向の変化が終了したと判定されると、ステップS150において、不感帯エリアへの進入位置における車両の進行方向データ、及び不感帯エリアからの退出位置における車両の進行方向データを、走行軌跡データから抽出する。これらの不感帯エリア進入位置及び退出位置における進行方向データとして、進入位置及び退出位置にそれぞれ対応する各1個の進行方向データを用いても良いし、進入前及び退出後のそれぞれ複数の位置に対応する複数の進行方向データを平均化した進行方向データを用いても良い。
【0039】
ステップS160では、ステップS150にて抽出した不感帯エリア進入位置及び退出位置における進行方向データに基づいて、車両がUターンを行ったか否かを判定する。具体的には、進入位置における進行方向と退出位置における進行方向とが、逆方向とみなすことが可能な、例えば180°±30°の角度範囲に属するか否かに基づいて、車両がUターンしたか否かを判定する。
【0040】
車両がUターンする場合、図5(a)に示すように、車両の進行方向の変化の累積値が180°を大きく上回ったり、あるいは、図5(b)に示すように、車両の進行方向を逆転させて切り返しを行わったり、そのUターン過程における車両の走行奇跡は様々である。
【0041】
しかしながら、Uターン過程において車両の進行方向がどのように変化したかに係わらず、車両がUターンを行った場合には、そのUターン開始前の進行方向とUターン終了後の進行方向とは、結果としてほぼ逆方向となる。従って、本実施形態のように、不感帯エリア進入位置及び退出位置における進行方向データを用いることにより、車両が進行方向の変化を開始する前の進行方向と、進行方向の変化を終了した後の進行方向とを対比することができ、車両がUターンしたか否かを簡便かつ精度良く判定することができる。
【0042】
ステップS160において、車両がUターンしたと判定した場合には、ステップS180において、車両が不感帯エリア進入前に走行していた道路、すなわち進行方向を変化する前に走行していた道路が、現在、車両が走行している道路であると決定する。従って、この決定に基づいて、前述した図3のフローチャートのステップS50及びS60の処理を実行することで、車両がUターンを行った場合であっても、即座に自車両マークを道路上に正しく表示することができる。
【0043】
一方、ステップS160において車両はUターンしていないと判定された場合には、ステップS170,S190及びS200からなる通常のマップマッチング処理を実行する。すなわち、ステップS170では、ステップS10にて更新された走行軌跡データに基づいて、車両の走行軌跡の形状データを算出するとともに、その算出した形状データを道路データと対比する。この道路データは、車両の現在位置と所定距離以内の道路、もしくは既に車両の現在位置が道路上にマッチングされている場合には、そのマッチング道路に接続された道路などの候補道路の道路データである。
【0044】
そして、この対比処理では、候補道路の道路データの中で、走行軌跡の形状データに対して最も相関値の高い道路形状を有する道路データが選択される。この相関値は、車両の現在位置と道路との間の距離の長さ、車両が右左折した場合の方向、角度、その右左折地点前後の直進距離、複数回右左折した場合には、その右左折間の直進距離、その右左折の回数や順序といった、その走行軌跡の形状を特徴づける複数の要素を考慮して算出される。
【0045】
そして、ステップS190では、ステップS170にて算出された相関値が所定の閾値以上であるか否かを判定する。この判定処理にて、相関値が所定の閾値未満と判定されると、候補道路の中に、車両が走行していると確実に判断できる道路が存在しないので、そのまま、図4に示す処理を終了する。この場合、図3のフローチャートのステップS60の表示処理では、ステップS20にて算出された現在位置に対応する位置に、取得もしくは算出した進行方向に従って自車両マークを表示しつつ、その周辺道路地図を併せて表示する。すなわち、この場合は、車両の現在位置が道路上にマッチングされることなく、自車両マークを表示すべき位置としてその現在位置がそのまま用いられる。
【0046】
以上、説明したように本実施形態による車両用ナビゲーション装置によれば、車両の進行方向変化開始前の進行方向と進行方向変化終了後の進行方向とに基づいて、車両がUターンしたか否かを判定しているので、その判定を簡便かつ精度よく行うことができる。
【0047】
特に、本実施形態では、進行方向変化開始点を基準として不感帯エリアを設定している。車両の位置がこの不感帯エリア内に属している場合には、その位置における進行方向は、Uターンを行ったか否かの判定に用いずに、その不感帯エリアに対する進入及び退出時の進行方向をUターン判定に用いるようにしている。すなわち、不感帯エリアを設定することで、単に不感帯エリアと車両位置との比較により、不感帯エリアへの進入位置及び退出位置を特定でき、それぞれの位置における進行方向を間単に抽出することができる。
【0048】
以上、本発明の好ましい実施形態について説明したが、本発明は上述した実施形態に何ら制限されることなく、本発明の主旨を逸脱しない範囲において種々変形して実施することが可能である。
【0049】
例えば、上述した実施形態においては、車両の進行方向の変化が開始されたときに、不感帯エリアを設定するようにしたが、車両の進行方向の変化が終了したときに、不感帯エリアを設定し、その不感帯エリアと走行奇跡データにおける各位置を比較するようにしても良い。
【0050】
また、不感帯エリアは、進行方向変化開始点を基準として設定する他に、進行方向変化終了点を基準として設定したり、例えば変化開始点と変化終了点とを結ぶ線上の中間位置を基準とするなど、変化開始点及び変化終了点の両方に基づいて設定しても良い。
【0051】
また、上述した実施形態のように不感帯エリアを設定するのではなく、走行軌跡データから直接的に、進行方向変化開始前の進行方向と、変化終了後の進行方向とを抽出するようにすることも可能である。すなわち、走行軌跡データは、位置と方向からなるので、各位置の方向の変化の大きさから、進行方向の変化開始点及び変化終了点に対応するデータが特定できる。従って、変化開始点前及び変化終了後の進行方向を、走行軌跡データから求めることができる。
【0052】
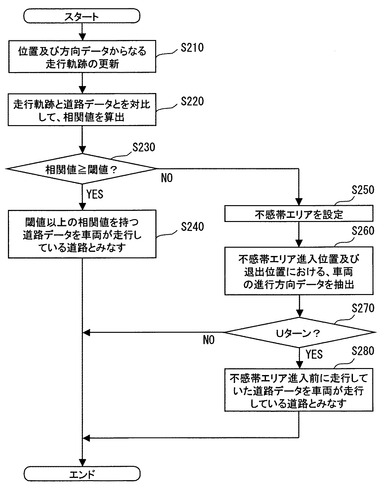
また、図4のフローチャートに示すマップマッチング処理を、図6のように変形しても良い。この図6に示すフローチャートでは、まず、通常のマップマッチング処理を実行する(ステップS210〜S240)。そして、この通常のマップマッチング処理において、候補道路の中で、車両が走行している道路を決定できない場合(ステップS230にて“No”と判定された場合)に、ステップS25〜S270に示すUターン判定が実行される。換言すれば、図6に示すフローチャートでは、通常のマップマッチング処理では車両が走行している道路を決定できないことを、車両がUターンを行ったと判定する一条件としている。
【0053】
上述したように、同一道路の対向車線同士は、基本的に同一のリンクデータによって示されるので、対向車線間は、リンクデータによって接続されることはない。このため、車両がUターンを行った場合、通常のマップマッチング処理では、自車両マークを表示させるべき道路を一旦見失って、新たな道路を探索することになる。従って、通常のマップマッチング処理によって車両が走行している道路を決定できない、すなわち探索中であることを、車両がUターンを行ったと判定する一条件とすることで、Uターンの判定精度を高めることができる。
【図面の簡単な説明】
【0054】
【図1】本発明の実施形態に係わる、車両用ナビゲーション装置の概要構成を示すブロック図である。
【図2】地図データ入力器における、道路データのデータ構造を示す説明図である。
【図3】マップマッチング処理を用いて車両が走行する道路を決定して、その道路上に自車両マークを表示するためのメインルーチンを示すフローチャートである
【図4】図3のフローチャートにおけるマップマッチング処理の詳細を示すフローチャートである。
【図5】(a)、(b)は、実際に車両がUターンを行う場合に、そのUターン過程における走行軌跡の例をそれぞれ示す説明図である。
【図6】本発明の変形例による、マップマッチング処理の詳細を示すフローチャートである。
【図7】(a),(b)及び(c)は、マップマッチング処理の原理を説明するための説明図である。
【符号の説明】
【0055】
1 位置検出器
2 地磁気センサ
3 ジャイロスコープ
4 距離センサ
5 GPS受信機
6 地図データ入力器
7 操作スイッチ群
8 制御回路
9 外部メモリ
10 表示装置
11 外部情報入出力装置
【技術分野】
【0001】
本発明は、車両が方向転換(Uターン)を行った場合でも、車両の現在位置を、車両が走行する道路上に即座に合わせ込むことが可能な車両用ナビゲーション装置に関する。
【背景技術】
【0002】
従来、カーナビゲーション装置において、車両の正確な現在位置を算出するために、マップマッチング処理が採用されることが一般的である。このマップマッチング処理では、まず、GPSなどを利用した電波航法、または車速センサ及び方位センサ(ジャイロスコープ、地磁気センサなど)からの検出信号に基づいて現在位置を累積的に推定する自立航法、さらにはこれら電波航法と自立航法とを組み合わせたハイブリッド航法により車両の現在位置を含む走行軌跡を求める。そして、その走行軌跡を、地図データベースに格納されている道路データとを比較することにより、車両が走行している道路を推定し、正しい車両の現在位置を求める。
【0003】
図7(a),(b),(c)に基づいて、マップマッチング処理の原理を簡単に説明する。例えば、車両が到達した交差点に接続するすべての道路を、車両が次に通行する可能性のある候補道路として選択する。図7(a)に示す例では、道路a,b,cが候補道路として選択される。こうして選択された候補道路の道路形状と車両の走行軌跡の形状(図7(b))との比較を行ない、その相関性の最も高い道路を車両が走行している道路とみなし、その道路上に車両位置を確定する。図7(c)に示す例では、道路bの相関性が最も高いため、車両は道路bを走行しているとみなし、道路b上に車両位置を確定する。このような処理を、一定時間あるいは車両が一定距離走行するごとに行ない、常に道路上に車両位置を確定していく。
【0004】
ここで、特許文献1には、車両がUターンしても、常に車両の進行方向に対応した道路情報を表示するナビゲーション装置が開示されている。このナビゲーション装置では、ビーコン送信機から送信される、分岐点までの距離などの道路情報や、渋滞、工事、規制等の交通情報の各種情報を受信し、進行方向に対応した主方向情報とその反対方向に対応した従方向情報とに分けて記憶する。そして、車速センサ、回転角センサ、方位センサなどの検出結果に基づいて、車両の回転半径を算出しつつ、現在位置周辺の道路地図を参照して、車両がUターンしたか否かを検出する。車両のUターンを検出すると、従方向情報として記憶されている情報を、表示器に表示する。
【特許文献1】特開平5−248881号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上述した特許文献1には、具体的なUターンの検出方法が記載されていないが、このUターンの検出は、実際のところ、技術的困難性が高い。なぜならば、電波航法、自立航法を問わず、算出される車両位置には多少の誤差が含まれる可能性があることに加え、マップマッチング処理では、車両が現在走行中の道路に接続された道路を走行することを前提にしているためである。
【0006】
このため、車両がUターンを行った場合、マップマッチング処理によって、車両の現在位置が誤った道路上に一致されてしまうことがある。このような場合、地図上において車両が正しい道路上の位置に復帰するには、車両がある程度の距離を走行して、マップマッチングを行うための走行軌跡データが蓄積される必要がある。
【0007】
本発明は、上述した点に鑑みてなされたものであり、車両の方向転換(Uターン)が行われたか否かを精度良く判定して、方向転換が行われた場合には、車両が走行する道路上に車両マークを即座に表示することが可能な車両用ナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、請求項1に記載の車両用ナビゲーション装置は、
少なくとも車両の現在位置及び進行方向を示す車両マーク及びその周辺の地図を表示する表示部と、
車両の現在位置及び進行方向を測定する測定手段と、
測定手段が測定する現在位置に基づいて、車両の走行軌跡を算出する走行軌跡算出手段と、
地図データを格納する地図データ格納手段と、
地図データ格納手段が格納する地図データにおける、車両の現在位置近傍の道路の形状と、走行軌跡算出手段が算出する走行軌跡の形状とを比較して、車両が走行している道路を決定するマップマッチング処理を実行するマップマッチング手段と、
マップマッチング手段によって決定された道路上に車両マークが位置するように、表示部に車両マークと周辺地図とを表示させる表示制御手段とを備えた車両用ナビゲーション装置であって、
車両の進行方向が変化したとき、その変化開始前の進行方向と、変化終了後の進行方向とに基づいて、車両が方向転換を行ったか否かを判定する方向転換判定手段を備え、
マップマッチング手段は、方向転換判定手段によって車両が方向転換を行ったと判定された場合、車両が進行方向変化前に走行していた道路を、車両が走行していると道路として決定することを特徴とする。
【0009】
ここで、車両が方向転換(Uターン)したか否かは、例えば、方位センサなどによって検出される車両の進行方向の変化の累積値がほぼ180°となったか否かに基づいて判定することが考えられる。
【0010】
しかしながら、実際に車両が方向転換を行う場合、方向転換を行う道路の道幅が広ければ、図5(a)に示すように、方位センサによって検出される進行方向の変化の累積値が180°を大きく上回る場合がある。また、方向転換を行う道路の道幅が狭い場合には、図5(b)に示すように、車両の進行方向を逆転させて切り返しを行わなければならないこともある。このように、車両が方向転換する過程においては、180°を超えて進行方向を変化させたり、その進行方向を逆転させて切り返しを行ったりする。このため、その進行方向の変化途中の進行方向データに基づいて車両の方向転換の有無を判定することは困難性を伴う。
【0011】
このような点に鑑みて、請求項1に記載の車両用ナビゲーション装置では、車両の進行方向が変化したとき、その変化開始前の進行方向と、変化終了後の進行方向とに基づいて、車両の方向転換が行われたか否かを判定することとした。つまり、車両が方向転換する場合、その過程において車両の進行方向がどのように変化したかに係わらず、その方向転換開始前の進行方向と方向転換終了後の進行方向とは、結果としてほぼ逆方向となる。従って、請求項1に記載の車両用ナビゲーション装置のように、車両の進行方向変化開始前の進行方向と、変化終了後の進行方向とを用いることで、車両が方向転換したか否かを簡便かつ精度良く判定することができる。
【0012】
そして、方向転換判定手段によって車両が方向転換を行ったと判定された場合、マップマッチング手段が、車両が進行方向変化前に走行していた道路を、車両が走行していると道路として決定することで、車両が走行する道路上に車両マークを即座に表示することが可能になる。
【0013】
請求項2に記載したように、方向転換判定手段は、車両の進行方向の変化開始位置と変化終了位置との少なくとも一方を基準として、その進行方向に関するデータの採否を区別するための不感帯エリアを設定し、その不感帯エリアに車両が進入するときの進行方向を、変化開始前の進行方向とし、不感帯エリアから車両が退出するときの進行方向を、変化終了後の進行方向として、これらの進行方向に基づいて、車両が方向転換を行ったか否かを判定することができる。
【0014】
すなわち、車両の位置が不感帯エリア内に属している場合には、その位置における進行方向は、方向転換の判定に用いられることがなく、その不感帯エリアに対する進入及び退出時の進行方向が方向転換の判定に用いられるのである。この場合、不感帯エリアと車両位置とを比較することで、不感帯エリアへの進入位置及び退出位置を特定でき、それぞれの位置における進行方向を間単に抽出することができる。
【0015】
また、請求項3に記載したように、方向転換判定手段は、車両の進行方向の履歴を保存する保存手段を備え、車両が進行方向を変化させた場合、保存手段に保存されている、進行方向の変化を開始する前の進行方向と、進行方向の変化を終了した後の進行方向とを抽出し、これらの進行方向に基づいて、車両が方向転換を行ったか否かを判定するようにしても良い。このようにしても、進行方向変化開始前の進行方向と、変化終了後の進行方向とを簡単に抽出して、車両が方向転換を行ったか否かを簡単に判定することができる。
【0016】
なお、請求項4に記載したように、方向転換判定手段は、変化開始前の進行方向と変化終了後の進行方向とが、逆方向とみなすことが可能な所定の角度範囲に属するときに、車両が方向転換を行ったと判定することが好ましい。道路が片側複数車線からなる場合などは、車両が方向転換を行った場合であっても、その進行方向は、正確に180°だけ逆向きになるとは限らない。従って、変化開始前の進行方向と変化終了後の進行方向とが、逆方向とみなすことが可能な所定の角度範囲に属することを条件として、方向転換したと判定することが好ましい。
【0017】
請求項5に記載したように、方向転換判定手段は、マップマッチング手段が車両が走行している道路を決定できないことを、車両が方向転換を行ったと判定する一条件としても良い。
【0018】
同一道路の対向車線同士は、基本的に同一の道路データによって示されるので、対向車線間は、道路データによって接続されることはない。このため、車両が方向転換を行った場合、通常、マップマッチング手段が、車両の現在位置を一致させるべき道路を探索することになり、このような道路の探索中は、車両が走行している道路を決定できない状態となる。従って、マップマッチング手段が車両が走行している道路を決定できないことを、車両が方向転換を行ったと判定する一条件とすることで、方向転換の判定精度を高めることができる。
【発明を実施するための最良の形態】
【0019】
以下、本発明の実施形態における車両用ナビゲーション装置に関して、図面に基づいて説明する。図1は、本実施形態に係わる車両用ナビゲーション装置の概略構成を示すブロック図である。
【0020】
同図に示すように、本実施形態のカーナビゲーション装置は、位置検出器1、地図データ入力器6、操作スイッチ群7、これらの接続された制御回路8、制御回路8に接続された外部メモリ9、表示装置10及び外部情報入出力装置11などを備えている。
【0021】
制御回路8は通常のコンピュータとして構成されており、内部には周知のCPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインが備えられている。ROMには、制御回路8が実行するためのプログラムが書き込まれており、このプログラムに従ってCPU等が所定の演算処理を実行する。
【0022】
位置検出器1は、いずれも周知の地磁気センサ2、ジャイロスコープ3、距離センサ4、及び衛星からの電波に基づいて車両の位置を測定するGPS(Global Positioning System)のためのGPS受信機5を有している。これらは、各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。すなわち、GPSによる電波航法と、地磁気センサ、ジャイロスコープ3及び距離センサ4による自立航法を組み合わせたハイブリッド航法により、車両の現在位置に関するデータ(現在位置座標及び進行方向)を測定する。なお、各センサの精度によっては、位置検出器1を上述した内の一部で構成してもよく、更に、図示しないステアリングの回転センサ、各転動輪の車速センサ等を用いてもよい。
【0023】
地図データ入力器6は、道路データ、背景データ及び文字データを含む地図データを入力するための装置である。地図データを記憶する記憶媒体としては、そのデータ量からCD−ROMまたはDVD−ROMを用いるのが一般的であるが、メモリカード、ハードディスク等を用いてもよい。
【0024】
また、地図データは、外部のサーバから通信によって取得し、後述する外部メモリ9などに格納することも可能である。この場合、外部メモリ9に格納された地図データを用いて、車両周辺の地図表示、表示地図の尺度変更、経路案内等の各種のナビゲーション機能を実施することができる。これらの機能は、主に制御回路8によって各種の演算処理がなされることによって実行される。
【0025】
ここで、道路データの構成の一例について図2を用いて説明する。図2に示すように、道路データ6aは、道路毎に固有の番号を付したリンクID、リンク座標データ、ノード座標データ、高速道路や国道等の道路種別を示す道路種別データ、道路幅員データ等の各データから構成されている。道路データ6aにおけるリンクとは、地図上の各道路を、交差点、分岐点などを示すノードにより複数に分割し、2つのノード間をリンクとして規定したものである。そして、リンク座標データには、このリンクの始端と終端の座標が記述される。なお、リンクの途中にノードが含まれる場合には、ノード座標データにノード座標が記述される。この道路データ6aは、地図を表示する以外に、マップマッチング処理を行う際の道路の形状を与えるために用いられたり、目的地までの案内経路を検索する際に用いられる。ただし、案内経路の検索に関しては、別途、案内経路として用いるべき各道路の接続関係を示す道路ネットワークデータを用意し、そのネットワークデータを用いて検索するようにしても良い。
【0026】
背景データは、図示していないが、地図上の各施設や地形等と、それに対応する地図上の座標を関連付けたデータとして構成している。なお、施設に関しては、その施設に関連付けて電話番号や、住所等のデータも記憶されている。この目印データは、後述する外部メモリ9に記憶されているものであってもよい。また、文字データは、地名、施設名、道路名等を地図上に表示するものであって、その表示すべき位置に対応する座標データと関連付けて記憶されている。
【0027】
上述したように、各道路は、基本的に一本のリンクによって表現される。従って、従来は、車両が方向転換(Uターン)を行った場合、マップマッチング処理によって、車両の位置を即座にそのUターンを行った道路上に一致させることができない場合があった。これは、上述したように、マップマッチング処理が、接続されているリンク形状と車両の走行軌跡の形状との一致度によって車両が走行している道路を決定するのに対し、一本の道路における対向車線同士は、リンクを介して接続されていないためである。
【0028】
操作スイッチ群7は、例えば、後述する表示装置10と一体になったタッチスイッチもしくはメカニカルなスイッチ等が用いられ、各種入力に使用される。例えば、操作スイッチ群7を用いて、目的地の位置を入力することが可能であり、この場合、ナビゲーション装置は、現在位置からその目的地までの最適な経路を自動的に選択して案内経路を形成し表示する、いわゆる経路案内機能を備えている。このような自動的に最適な経路を設定する手法は、周知のダイクストラ法等の手法が知られている。また、操作スイッチ群7を用いて、例えば、所望の施設の住所、施設名称、電話番号等を入力することが可能であり、この場合、ナビゲーション装置は、その入力されて施設の位置等を検索する検索機能も備えている。
【0029】
外部メモリ9は、例えば、メモリカードやハードディスク等の記憶媒体からなる。この外部メモリ9には、ユーザによって記憶されたテキストデータ、画像データ、音声データ等の各種データが記憶される。さらに、車両用ナビゲーション装置が、上述したように、地図データを外部のサーバから取得する場合には、その地図データを格納したりする。
【0030】
表示装置10は、例えば、液晶ディスプレイによって構成され、表示装置10の画面には車両の現在位置に対応しつつ、その進行方向を表示する自車両マーク、及び、地図データ入力器6より入力された地図データによって生成される車両周辺の道路地図を表示することができる。さらに、目的地が設定された場合、この道路地図上には、現在位置から目的地までの誘導経路を重ねて表示することが出来る。
【0031】
外部情報入出力装置11は、道路に敷設されたビーコンや各地のFM放送局を介して、VICSセンタから配信される道路交通情報等の情報を受信したり、必要に応じて車両側から外部へ情報を送信したりする装置である。受信した情報は、制御回路8で処理され、例えば、渋滞情報や規制情報等は表示装置10に表示される道路地図上に重ねて表示される。
【0032】
次に、本発明の特徴である、マップマッチング処理を行いつつ、表示装置10に車両の現在位置及び進行方向を示す自車両マーク及びその周辺の道路地図を表示する処理について、図3及び図4のフローチャートを用いて説明する。なお、図3は、マップマッチング処理を用いて車両が走行する道路を決定して、その道路上に自車両マークを表示するためのメインルーチンを示し、図4は、図3のフローチャートにおけるマップマッチング処理の詳細を示すものである。また、図3及び図4に示す処理は、例えば、所定時間経過するごとに、若しくは車両が所定距離走行するごとに繰返し実行される。
【0033】
図3に示すように、まず、ステップS10において、位置検出器1の各センサなどからの信号が入力され、ステップS20において、入力された信号に基づいて、車両の現在位置を算出する。このとき、GPS受信器5による位置データは、上述の道路データの座標データ(緯度と経度)と同じ形態で取得される。また、地磁気センサ2、ジャイロスコープ3、距離センサ4によって自車両の進行方向及び走行距離に関するデータが取得され、過去に算出、もしくは確定された車両位置を基準として、現在位置の座標データの算出を行う(自立航法による座標データの算出)。なお、現在位置は、基本的には、自立航法により算出された座標データに基づいて求められる。ただし、GPS受信器5による位置データが取得されている場合には、両者を比較し、その差が所定距離以上である場合には、現在位置として、GPS受信器5による位置データを採用する。
【0034】
続いて、ステップS30では、ステップS20にて算出された車両の現在位置の座標に基づいて、車両周辺の地図データの読み込みを行う。次に、ステップS40において、マップマッチング処理を行う。このマップマッチング処理では、詳しくは後述するが、例えば、ステップS20にて算出した現在位置と所定距離以内の道路、もしくは既に道路上にマッチングされている場合には、そのマッチング道路に接続された道路を車両が走行する可能性のある道路として特定する。そして、ステップS10にて過去に算出された複数個の現在位置と最新の現在位置とを連結して、走行軌跡の形状データを算出する。その走行軌跡の形状データと、車両が走行する可能性のある道路の形状とを比較して、最も相関の高い道路を車両が走行している道路と決定(推定)する。
【0035】
なお、ステップS20における現在位置の算出、及び上述した走行軌跡の算出は、GPS受信機5の位置データのみから行っても良いし、自立航法の位置データのみから行っても良い。
【0036】
マップマッチング処理によって車両が走行している道路が決定されると、ステップS50において、上述した走行軌跡の形状をその道路に当てはめることによって、車両の現在位置を確定する。このように、車両の現在位置が確定された場合には、その後、その確定位置を基準として自立航法による位置データが算出される。そして、ステップS60において、確定された現在位置に対応する位置に、車両の進行方向を示す自車両マークを表示しつつ、その周辺の道路地図を表示するための表示データを作成し、その表示データを用いて、自車両マーク及び周辺道路地図を表示装置10に表示する。
【0037】
次に、図4のフローチャートに基づいて、マップマッチング処理の詳細について説明する。まず、ステップS110では、ステップS20にて算出された現在位置に基づいて、位置及び方向データからなる走行軌跡データを更新する。そして、ステップS120において、更新された走行軌跡データに基づいて、車両の進行方向の変化が開始されたか否かを判定する。この判定処理において、車両の進行方向の変化が開始されたと判定されると、ステップS130において、その進行方向変化開始点を基準として不感帯エリアを設定する。この不感帯エリアは、例えば、図5(a)、(b)に示すように、進行方向変化開始点から車両がUターンを行った場合に、そのUターン時の走行軌跡が含まれるように、進行方向変化開始点を中心として設定される。
【0038】
ステップS140では、更新された走行軌跡データに基づいて、車両の進行方向の変化が終了したか否かを判定する。この判定処理において、車両の進行方向の変化が終了したと判定されると、ステップS150において、不感帯エリアへの進入位置における車両の進行方向データ、及び不感帯エリアからの退出位置における車両の進行方向データを、走行軌跡データから抽出する。これらの不感帯エリア進入位置及び退出位置における進行方向データとして、進入位置及び退出位置にそれぞれ対応する各1個の進行方向データを用いても良いし、進入前及び退出後のそれぞれ複数の位置に対応する複数の進行方向データを平均化した進行方向データを用いても良い。
【0039】
ステップS160では、ステップS150にて抽出した不感帯エリア進入位置及び退出位置における進行方向データに基づいて、車両がUターンを行ったか否かを判定する。具体的には、進入位置における進行方向と退出位置における進行方向とが、逆方向とみなすことが可能な、例えば180°±30°の角度範囲に属するか否かに基づいて、車両がUターンしたか否かを判定する。
【0040】
車両がUターンする場合、図5(a)に示すように、車両の進行方向の変化の累積値が180°を大きく上回ったり、あるいは、図5(b)に示すように、車両の進行方向を逆転させて切り返しを行わったり、そのUターン過程における車両の走行奇跡は様々である。
【0041】
しかしながら、Uターン過程において車両の進行方向がどのように変化したかに係わらず、車両がUターンを行った場合には、そのUターン開始前の進行方向とUターン終了後の進行方向とは、結果としてほぼ逆方向となる。従って、本実施形態のように、不感帯エリア進入位置及び退出位置における進行方向データを用いることにより、車両が進行方向の変化を開始する前の進行方向と、進行方向の変化を終了した後の進行方向とを対比することができ、車両がUターンしたか否かを簡便かつ精度良く判定することができる。
【0042】
ステップS160において、車両がUターンしたと判定した場合には、ステップS180において、車両が不感帯エリア進入前に走行していた道路、すなわち進行方向を変化する前に走行していた道路が、現在、車両が走行している道路であると決定する。従って、この決定に基づいて、前述した図3のフローチャートのステップS50及びS60の処理を実行することで、車両がUターンを行った場合であっても、即座に自車両マークを道路上に正しく表示することができる。
【0043】
一方、ステップS160において車両はUターンしていないと判定された場合には、ステップS170,S190及びS200からなる通常のマップマッチング処理を実行する。すなわち、ステップS170では、ステップS10にて更新された走行軌跡データに基づいて、車両の走行軌跡の形状データを算出するとともに、その算出した形状データを道路データと対比する。この道路データは、車両の現在位置と所定距離以内の道路、もしくは既に車両の現在位置が道路上にマッチングされている場合には、そのマッチング道路に接続された道路などの候補道路の道路データである。
【0044】
そして、この対比処理では、候補道路の道路データの中で、走行軌跡の形状データに対して最も相関値の高い道路形状を有する道路データが選択される。この相関値は、車両の現在位置と道路との間の距離の長さ、車両が右左折した場合の方向、角度、その右左折地点前後の直進距離、複数回右左折した場合には、その右左折間の直進距離、その右左折の回数や順序といった、その走行軌跡の形状を特徴づける複数の要素を考慮して算出される。
【0045】
そして、ステップS190では、ステップS170にて算出された相関値が所定の閾値以上であるか否かを判定する。この判定処理にて、相関値が所定の閾値未満と判定されると、候補道路の中に、車両が走行していると確実に判断できる道路が存在しないので、そのまま、図4に示す処理を終了する。この場合、図3のフローチャートのステップS60の表示処理では、ステップS20にて算出された現在位置に対応する位置に、取得もしくは算出した進行方向に従って自車両マークを表示しつつ、その周辺道路地図を併せて表示する。すなわち、この場合は、車両の現在位置が道路上にマッチングされることなく、自車両マークを表示すべき位置としてその現在位置がそのまま用いられる。
【0046】
以上、説明したように本実施形態による車両用ナビゲーション装置によれば、車両の進行方向変化開始前の進行方向と進行方向変化終了後の進行方向とに基づいて、車両がUターンしたか否かを判定しているので、その判定を簡便かつ精度よく行うことができる。
【0047】
特に、本実施形態では、進行方向変化開始点を基準として不感帯エリアを設定している。車両の位置がこの不感帯エリア内に属している場合には、その位置における進行方向は、Uターンを行ったか否かの判定に用いずに、その不感帯エリアに対する進入及び退出時の進行方向をUターン判定に用いるようにしている。すなわち、不感帯エリアを設定することで、単に不感帯エリアと車両位置との比較により、不感帯エリアへの進入位置及び退出位置を特定でき、それぞれの位置における進行方向を間単に抽出することができる。
【0048】
以上、本発明の好ましい実施形態について説明したが、本発明は上述した実施形態に何ら制限されることなく、本発明の主旨を逸脱しない範囲において種々変形して実施することが可能である。
【0049】
例えば、上述した実施形態においては、車両の進行方向の変化が開始されたときに、不感帯エリアを設定するようにしたが、車両の進行方向の変化が終了したときに、不感帯エリアを設定し、その不感帯エリアと走行奇跡データにおける各位置を比較するようにしても良い。
【0050】
また、不感帯エリアは、進行方向変化開始点を基準として設定する他に、進行方向変化終了点を基準として設定したり、例えば変化開始点と変化終了点とを結ぶ線上の中間位置を基準とするなど、変化開始点及び変化終了点の両方に基づいて設定しても良い。
【0051】
また、上述した実施形態のように不感帯エリアを設定するのではなく、走行軌跡データから直接的に、進行方向変化開始前の進行方向と、変化終了後の進行方向とを抽出するようにすることも可能である。すなわち、走行軌跡データは、位置と方向からなるので、各位置の方向の変化の大きさから、進行方向の変化開始点及び変化終了点に対応するデータが特定できる。従って、変化開始点前及び変化終了後の進行方向を、走行軌跡データから求めることができる。
【0052】
また、図4のフローチャートに示すマップマッチング処理を、図6のように変形しても良い。この図6に示すフローチャートでは、まず、通常のマップマッチング処理を実行する(ステップS210〜S240)。そして、この通常のマップマッチング処理において、候補道路の中で、車両が走行している道路を決定できない場合(ステップS230にて“No”と判定された場合)に、ステップS25〜S270に示すUターン判定が実行される。換言すれば、図6に示すフローチャートでは、通常のマップマッチング処理では車両が走行している道路を決定できないことを、車両がUターンを行ったと判定する一条件としている。
【0053】
上述したように、同一道路の対向車線同士は、基本的に同一のリンクデータによって示されるので、対向車線間は、リンクデータによって接続されることはない。このため、車両がUターンを行った場合、通常のマップマッチング処理では、自車両マークを表示させるべき道路を一旦見失って、新たな道路を探索することになる。従って、通常のマップマッチング処理によって車両が走行している道路を決定できない、すなわち探索中であることを、車両がUターンを行ったと判定する一条件とすることで、Uターンの判定精度を高めることができる。
【図面の簡単な説明】
【0054】
【図1】本発明の実施形態に係わる、車両用ナビゲーション装置の概要構成を示すブロック図である。
【図2】地図データ入力器における、道路データのデータ構造を示す説明図である。
【図3】マップマッチング処理を用いて車両が走行する道路を決定して、その道路上に自車両マークを表示するためのメインルーチンを示すフローチャートである
【図4】図3のフローチャートにおけるマップマッチング処理の詳細を示すフローチャートである。
【図5】(a)、(b)は、実際に車両がUターンを行う場合に、そのUターン過程における走行軌跡の例をそれぞれ示す説明図である。
【図6】本発明の変形例による、マップマッチング処理の詳細を示すフローチャートである。
【図7】(a),(b)及び(c)は、マップマッチング処理の原理を説明するための説明図である。
【符号の説明】
【0055】
1 位置検出器
2 地磁気センサ
3 ジャイロスコープ
4 距離センサ
5 GPS受信機
6 地図データ入力器
7 操作スイッチ群
8 制御回路
9 外部メモリ
10 表示装置
11 外部情報入出力装置
【特許請求の範囲】
【請求項1】
少なくとも車両の現在位置及び進行方向を示す車両マーク及びその周辺の地図を表示する表示部と、
前記車両の現在位置及び進行方向を測定する測定手段と、
前記測定手段が測定する現在位置に基づいて、車両の走行軌跡を算出する走行軌跡算出手段と、
地図データを格納する地図データ格納手段と、
前記地図データ格納手段が格納する地図データにおける、前記車両の現在位置近傍の道路の形状と、前記走行軌跡算出手段が算出する走行軌跡の形状とを比較して、車両が走行している道路を決定するマップマッチング処理を実行するマップマッチング手段と、
前記マップマッチング手段によって決定された道路上に前記車両マークが位置するように、前記表示部に前記車両マークと周辺地図とを表示させる表示制御手段とを備えた車両用ナビゲーション装置であって、
前記車両の進行方向が変化したとき、その変化開始前の進行方向と、変化終了後の進行方向とに基づいて、車両が方向転換を行ったか否かを判定する方向転換判定手段を備え、
前記マップマッチング手段は、前記方向転換判定手段によって車両が方向転換を行ったと判定された場合、前記車両が進行方向変化前に走行していた道路を、車両が走行していると道路として決定することを特徴とする車両用ナビゲーション装置。
【請求項2】
前記方向転換判定手段は、前記車両の進行方向の変化開始位置と変化終了位置との少なくとも一方を基準として、その進行方向に関するデータの採否を区別するための不感帯エリアを設定し、その不感帯エリアに車両が進入するときの進行方向を、前記変化開始前の進行方向とし、不感帯エリアから車両が退出するときの進行方向を、前記変化終了後の進行方向として、これらの進行方向に基づいて、前記車両が方向転換を行ったか否かを判定することを特徴とする請求項1に記載の車両用ナビゲーション装置。
【請求項3】
前記方向転換判定手段は、前記車両の進行方向の履歴を保存する保存手段を備え、
前記車両が進行方向を変化させた場合、前記保存手段に保存されている、進行方向の変化を開始する前の進行方向と、進行方向の変化を終了した後の進行方向とを抽出し、これらの進行方向に基づいて、前記車両が方向転換を行ったか否かを判定することを特徴とする請求項1に記載の車両用ナビゲーション装置。
【請求項4】
前記方向転換判定手段は、前記変化開始前の進行方向と前記変化終了後の進行方向とが、逆方向とみなすことが可能な所定の角度範囲に属するときに、前記車両が方向転換を行ったと判定することを特徴とする請求項1乃至請求項3のいずれかに記載の車両用ナビゲーション装置。
【請求項5】
前記方向転換判定手段は、前記マップマッチング手段が前記車両が走行している道路を決定できないことを、前記車両が方向転換を行ったと判定する一条件とすることを特徴とする請求項1乃至請求項4のいずれかに記載の車両用ナビゲーション装置。
【請求項1】
少なくとも車両の現在位置及び進行方向を示す車両マーク及びその周辺の地図を表示する表示部と、
前記車両の現在位置及び進行方向を測定する測定手段と、
前記測定手段が測定する現在位置に基づいて、車両の走行軌跡を算出する走行軌跡算出手段と、
地図データを格納する地図データ格納手段と、
前記地図データ格納手段が格納する地図データにおける、前記車両の現在位置近傍の道路の形状と、前記走行軌跡算出手段が算出する走行軌跡の形状とを比較して、車両が走行している道路を決定するマップマッチング処理を実行するマップマッチング手段と、
前記マップマッチング手段によって決定された道路上に前記車両マークが位置するように、前記表示部に前記車両マークと周辺地図とを表示させる表示制御手段とを備えた車両用ナビゲーション装置であって、
前記車両の進行方向が変化したとき、その変化開始前の進行方向と、変化終了後の進行方向とに基づいて、車両が方向転換を行ったか否かを判定する方向転換判定手段を備え、
前記マップマッチング手段は、前記方向転換判定手段によって車両が方向転換を行ったと判定された場合、前記車両が進行方向変化前に走行していた道路を、車両が走行していると道路として決定することを特徴とする車両用ナビゲーション装置。
【請求項2】
前記方向転換判定手段は、前記車両の進行方向の変化開始位置と変化終了位置との少なくとも一方を基準として、その進行方向に関するデータの採否を区別するための不感帯エリアを設定し、その不感帯エリアに車両が進入するときの進行方向を、前記変化開始前の進行方向とし、不感帯エリアから車両が退出するときの進行方向を、前記変化終了後の進行方向として、これらの進行方向に基づいて、前記車両が方向転換を行ったか否かを判定することを特徴とする請求項1に記載の車両用ナビゲーション装置。
【請求項3】
前記方向転換判定手段は、前記車両の進行方向の履歴を保存する保存手段を備え、
前記車両が進行方向を変化させた場合、前記保存手段に保存されている、進行方向の変化を開始する前の進行方向と、進行方向の変化を終了した後の進行方向とを抽出し、これらの進行方向に基づいて、前記車両が方向転換を行ったか否かを判定することを特徴とする請求項1に記載の車両用ナビゲーション装置。
【請求項4】
前記方向転換判定手段は、前記変化開始前の進行方向と前記変化終了後の進行方向とが、逆方向とみなすことが可能な所定の角度範囲に属するときに、前記車両が方向転換を行ったと判定することを特徴とする請求項1乃至請求項3のいずれかに記載の車両用ナビゲーション装置。
【請求項5】
前記方向転換判定手段は、前記マップマッチング手段が前記車両が走行している道路を決定できないことを、前記車両が方向転換を行ったと判定する一条件とすることを特徴とする請求項1乃至請求項4のいずれかに記載の車両用ナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−155503(P2007−155503A)
【公開日】平成19年6月21日(2007.6.21)
【国際特許分類】
【出願番号】特願2005−351174(P2005−351174)
【出願日】平成17年12月5日(2005.12.5)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成19年6月21日(2007.6.21)
【国際特許分類】
【出願日】平成17年12月5日(2005.12.5)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]