
車両用ナビゲーション装置
【課題】指定したい道路名をユーザーが知らない場合であっても、その道路までの経路案内を行う。
【解決手段】位置検出器3は、車両の現在位置を検出する。操作スイッチ群5、マイク10、リモコン12などは、目的地への経路の途中または目的地の近傍に存する既知の施設を経路施設として入力する。制御回路2は、経路施設の位置を検索し、経路施設の位置に基づいて、当該経路施設に面した道路を施設隣接道路として探索し、車両の現在位置から施設隣接道路までの経路を探索し、探索された経路に基づいて、車両の現在位置から施設隣接道路までの車両の経路案内を行う。
【解決手段】位置検出器3は、車両の現在位置を検出する。操作スイッチ群5、マイク10、リモコン12などは、目的地への経路の途中または目的地の近傍に存する既知の施設を経路施設として入力する。制御回路2は、経路施設の位置を検索し、経路施設の位置に基づいて、当該経路施設に面した道路を施設隣接道路として探索し、車両の現在位置から施設隣接道路までの経路を探索し、探索された経路に基づいて、車両の現在位置から施設隣接道路までの車両の経路案内を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、目的地ではなく通過点までの経路案内を行う車両用ナビゲーション装置に関する。
【背景技術】
【0002】
車両用ナビゲーション装置においては、運転者などのユーザーが目的地を入力して設定するのみで、車両の現在位置から目的地までの経路を探索し案内する。ところで、ユーザーによっては、通過点、例えば、ある特定の道路まで到達できれば、そこから目的地までの経路なら知っている場合がある。このような場合、車両の現在位置からその道路までの経路案内があれば十分であり、その道路から目的地までの経路案内は不要である。
そこで、近年では、車両の現在位置から目的地までの経路案内ではなく、車両の現在位置から通過点である特定の道路までの経路案内を行うようにした車両用ナビゲーション装置が考えられている(例えば、特許文献1,2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−117868号公報
【特許文献2】特開2002−350161号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1,2の車両用ナビゲーション装置は、特定の道路として幹線道路、即ち、多くのユーザーが道路名を知っている道路を指定するものである。そのため、ユーザーが幹線道路から目的地までの経路を知っている場合に有用である。
ところで、ユーザーによっては、特定の道路として幹線道路以外の道路を指定したい場合もある。例えば、幹線道路から目的地までの経路は知らないが、幹線道路以外の道路から目的地までの経路なら知っているという場合である。しかし、幹線道路以外の道路では、ユーザーがその道路名を知らない場合も多く、このような場合、その道路を特定の道路として指定することができず、その道路までの経路案内を行うことができない。
【0005】
本発明は、上述の事情に鑑みてなされたものであり、その目的は、指定したい道路名をユーザーが知らない場合であっても、その道路までの経路案内を行うことができる車両用ナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明は、目的地ではなく通過点までの経路案内を行う車両用ナビゲーション装置において、その通過点として、目的地までの途中に存する道路を指定するものである。そして、その道路を特定するための処理に特徴を有する。
即ち、請求項1の発明によれば、現在位置検出手段は、車両の現在位置を検出する。一方、入力手段は、目的地への経路の途中または目的地の近傍に存する既知の施設を経路施設として入力し、施設位置検索手段は、入力手段によって入力された経路施設の位置を検索し、道路探索手段は、施設位置検索手段によって検索された経路施設の位置に基づいて、当該経路施設に面した道路を施設隣接道路として探索する。
【0007】
そして、経路探索手段は、現在位置検出手段によって検出された車両の現在位置から道路探索手段によって探索された施設隣接道路までの経路を探索し、経路案内手段は、経路探索手段によって探索された経路に基づいて、車両の現在位置から施設隣接道路までの車両の経路案内を行う。即ち、目的地への経路の途中または目的地の近傍に存する既知の施設を入力することで、車両の現在位置からその施設に面した道路までの車両の経路案内が行われる。従って、指定したい道路名をユーザーが知らない場合であっても、その道路に面した施設を入力することによって当該道路を特定することができ、車両の現在位置からその道路までの経路案内を行うことができる。
【0008】
請求項2の発明によれば、通過履歴記憶手段は、車両が過去に通過した道路を通過履歴として記憶する。判断手段は、道路探索手段によって探索された施設隣接道路、つまり、経路施設に面した道路が過去に通過した道路であるか否かを、通過履歴記憶手段によって記憶された通過履歴に基づいて判断する。これにより、経路施設に面した道路が過去に通過した道路であるか否かも考慮して、車両の現在位置からその道路までの経路を探索することができ、ユーザーに馴染みのある経路に基づいて車両の経路案内を行うことができる。
【図面の簡単な説明】
【0009】
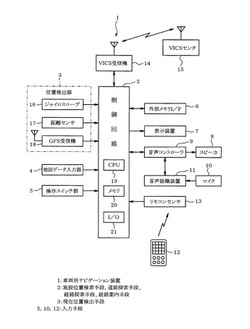
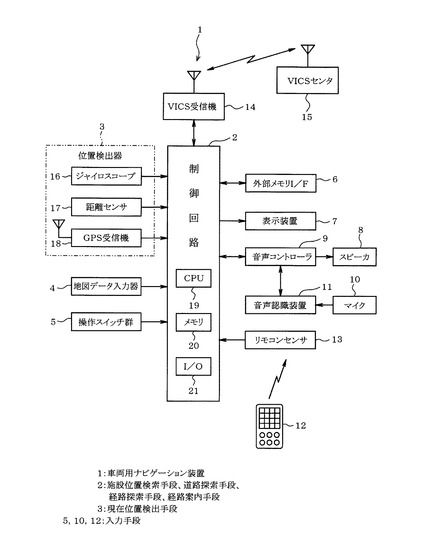
【図1】本発明の第1の実施形態に係るものであり、車両用ナビゲーション装置の電気的構成を示すブロック図
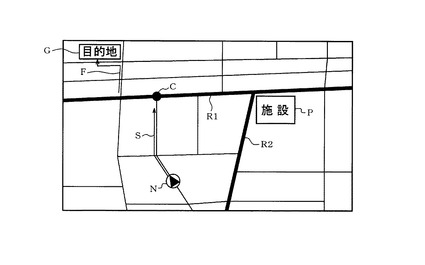
【図2】表示装置の画面の表示例を示す図
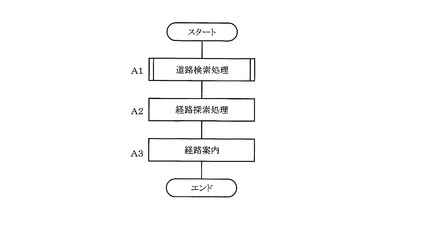
【図3】制御内容を示すフローチャート
【図4】道路検索処理の内容を示すフローチャート
【図5】道路探索処理の内容を示すフローチャート
【図6】道路選択処理の内容を示すフローチャート
【図7】本発明の第2の実施形態に係る図1相当図
【図8】図2相当図
【図9】図6相当図
【発明を実施するための形態】
【0010】
(第1の実施形態)
以下、本発明の第1の実施形態について図1から図6を参照しながら説明する。
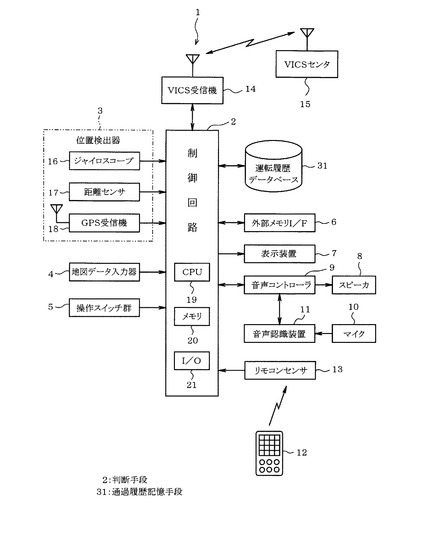
図1は、車両用ナビゲーション装置1の電気的構成を概略的に示す機能ブロック図である。車両用ナビゲーション装置1は、マイコンを主体として構成された制御回路2と、車両の現在位置を検出するための位置検出器3と、地図データ入力器4と、操作スイッチ群5と、外部メモリインターフェイス(I/F)6と、表示装置7と、スピーカ8が接続された音声コントローラ9と、マイク10から入力された音声を認識する音声認識装置11と、リモコン12との間でコマンドなどの送受信を行うリモコンセンサ13と、例えばVICS(登録商標)センタ15からの種々の交通情報を収受するVICS受信機14とを備えている。なお、制御回路2は、施設位置検索手段、道路探索手段、経路探索手段、経路案内手段に相当し、位置検出器3は、現在位置検出手段に相当し、操作スイッチ群5、マイク10、リモコン12などの各種の入力装置は、入力手段に相当する。
【0011】
位置検出器3は、車両の回転角速度を検出するジャイロスコープ16と、車両の走行距離を検出する距離センサ17と、人工衛星からの送信電波に基づいて車両の現在位置を検出(測位)するGPS(Global Positioning System)のためのGPS受信機18とを有している。制御回路2は、各センサ16〜18の検出値を補間しながら用いることにより、車両の現在位置、進行方向、速度、走行距離、現在時刻などを高精度で検出する。なお、精度の高いセンサを用いるのであれば、位置検出器3を上述したセンサ16〜18の一部のみで構成してもよい。また、ステアリングの回転センサや各転動輪の車輪センサなどを用いてもよい。
【0012】
地図データ入力器4は、データ記録メディア(図示せず)から各種データを読み出すドライブ装置により構成されている。地図データ記録メディアとしては、DVDなどの大容量記憶媒体を用いるのが一般的であるが、CD、メモリカード、ハードディスク装置などの記憶媒体を用いてもよい。
データ記録メディアには、経路探索、経路案内などの種々の処理に必要な各種データ(地図データ、目的地データ、施設データ、目印データ、マップマッチング用データ、交通情報を道路データに変換するためのテーブルデータ、背景レイヤのための背景データなど)が記憶されている。また、データ記録メディアには、施設名称を例えば50音順に並べた施設名称データベース、電話番号と施設との対応を示す電話番号データベースなどの各種データベースが設けられている。
【0013】
地図データは、道路地図に関する各種データ(道路(リンク)、道路名、道路形状、道路幅、交差点(ノード)、分岐点(ノード)、行き止まり点(ノード)、信号、踏切、建造物、各種施設、地名、地形など)を含むとともに、その道路地図を表示装置7の画面上に表示するための描画用データを含んでいる。また、各道路については、交通規制(一方通行、進入禁止など)が設定されている場合には、その交通規制情報も併せて記録されている。また、各道路については、その道路の属性情報も併せて記録されている。なお、道路の属性とは、その道路の種類や性質を示す情報であり、例えば、高速道路、細街路、幹線道路、有料道路などが設定されている。
【0014】
目的地データおよび施設データは、交通機関(駅など)、レジャー施設、宿泊施設、公共施設、各種の店舗(小売店、デパート、レストランなど)、住居やマンション、地名などに関する情報からなる。これらのデータには、電話番号、住所、座標(緯度および経度)などのデータが含まれるとともに、施設を示すランドマークなどを、表示装置7の画面上に道路地図に重ね合せて表示するためのデータが含まれている。
【0015】
表示装置7は、地図画面(図2参照)などを表示するための例えばカラー液晶ディスプレイを有しており、例えば運転席近傍に設置される。表示装置7の画面には、車両の現在位置周辺の地図が各種の縮尺で表示されるとともに、その表示に重ね合わせて、車両の現在位置と進行方向とを示す現在地マークN(図2参照)が表示される。また、経路案内の実行時には経路案内用の画面が表示される。さらに、表示装置7には、入力用の画面や、各種のメッセージなども表示される。
【0016】
操作スイッチ群5は、表示装置7の画面の近傍に設けられたメカニカルスイッチや、表示装置7の画面上に設けられるタッチパネルスイッチを含んで構成されている。操作スイッチ群5は、これらのメカニカルスイッチやタッチパネルスイッチの操作に応じた各種の指令信号(コマンド)を制御回路2に与える。
ユーザーは、この操作スイッチ群5を用いて、目的地の入力、目的地検索条件(目的地の検索に必要な情報)の入力、施設の入力、施設検索条件(施設の検索に必要な情報)の入力、通過点の入力、通過点検索条件(通過点の検索に必要な情報)の入力、表示装置7の画面や表示態様の切り替え操作(地図縮尺(詳細度)の変更、メニューの選択、経路探索の開始、経路案内の開始、現在位置の修正、音量調整など)を行う。
【0017】
リモコン12には複数の操作スイッチが設けられている。このリモコン12は、スイッチ操作に応じた各種の指令信号(コマンド)を、リモコンセンサ13を介して制御回路2に送信する。なお、ユーザーは、操作スイッチ群5とリモコン12の何れの操作によっても、制御回路2に同様の機能を実行させることができる。
【0018】
外部メモリI/F6は、図示しない外部メモリ媒体(例えばフラッシュメモリカードなど)が取り付けられるものである。この外部メモリI/F6は、例えば経路案内時に制御回路2が設定した経路のデータ、車両が通過した経路のデータなどを、外部メモリ媒体に書き込んで記憶したり、或いは、外部メモリ媒体に書き込んだデータを読み込むために使用される。
【0019】
音声認識装置11は、マイク10を介して入力された音声と内部に記憶してある認識用の辞書データとを照合し、入力された音声を認識する。音声コントローラ9は、音声認識装置11を制御して音声認識結果を制御回路2に出力するとともに、認識された音声をスピーカ8を介してトークバック出力する。また、制御回路2からの音声出力指令に基づいて音声出力信号をスピーカ8に出力する。スピーカ8から出力される音声は、経路案内に関する音声、操作説明に関する音声、上記のトークバック音声などである。
【0020】
制御回路2は、CPU19、RAM、ROM、EEPROM、フラッシュメモリなどからなるメモリ20、I/Oインターフェース21などを備えて構成されており、ナビゲーション動作を制御する機能を有している。制御回路2は、メモリ20に記憶された制御プログラムをCPU19に実行させることにより、経路探索、経路案内などを行う。
【0021】
経路探索の機能は、推奨する走行経路を自動計算するものであり、その手法としては例えばダイクストラ法が用いられる。
経路案内の機能は、走行経路に沿って移動可能なように、表示装置7の画面に現在地周辺の道路地図を表示するとともに、現在地マークN(図2参照)を道路地図に重ね合わせて表示する機能である。この場合、制御回路2は、現在地マークNを車両の走行に伴って地図上を移動させながら表示し、地図を車両の位置に応じてスクロールさせながら表示する。このとき、制御回路2は、現在地マークN(車両の現在位置)を画面の道路上に合わせるマップマッチングを行う。
【0022】
また、制御回路2は、操作スイッチ群5やリモコンセンサ13を通じて入力されたコマンドに基づいて、周知の地図表示機能、電話番号検索機能、郵便番号検索機能、マップコード(登録商標)のような固有コードを利用した検索機能、50音検索機能、ジャンル別検索機能、最寄り施設検索機能、目的地登録機能、地点登録機能など、多種多様な支援機能に係る処理を実行する。
【0023】
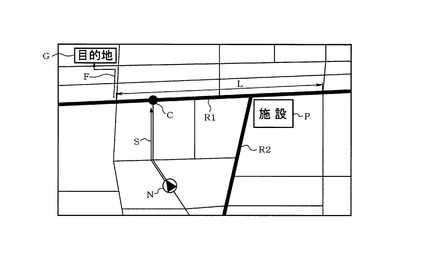
上記構成の車両用ナビゲーション装置1は、車両の出発地(現在位置)から目的地までの経路案内のみならず、車両の現在位置から特定の道路(ユーザーが指定した施設に面した道路)までの経路案内を行う。このような特定の道路までの経路案内は、例えば、ユーザーが、特定の道路R1から目的地Gまでの経路F(図2参照)なら知っているが、車両の現在位置Nから特定の道路R1までの経路S(図2参照)は知らないといった場合に有効である。さらに、上記構成の車両用ナビゲーション装置1は、指定したい道路R1の名称をユーザーが知らない場合であっても、その道路R1を特定の道路として設定できるようになっている。次に、この特定の道路までの経路案内ついて図3から図6を参照しながら説明する。図3は、制御回路2が実行する経路案内の制御内容を示すフローチャートである。
【0024】
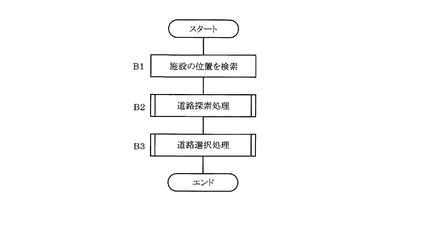
制御回路2は、まず、道路検索処理を実行する(ステップA1)。図4は、この道路検索処理の内容を示すフローチャートである。なお、この道路検索処理では、検索方法として、施設周辺道路検索、道路名検索などを選択できる。施設周辺道路検索は、ユーザーが操作スイッチ群5、マイク10、リモコン12などを介して入力した経路施設に面した道路を検索する方法である。なお、経路施設とは、目的地への経路の途中または目的地の近傍に存する施設であって、ユーザーが、その施設名、所在位置などを既に知っている施設のことをいう。ユーザーは、例えば、過去に行ったことがある施設、インターネットや情報誌などを通じて知った施設などを、経路施設として入力する。道路名検索は、ユーザーが操作スイッチ群5、マイク10、リモコン12などを介して入力した道路名の道路を検索する周知の方法である。以下、施設周辺道路検索の内容のみを説明し、道路名検索の内容の説明は省略する。
【0025】
施設周辺道路検索が選択されると、制御回路2は、ユーザーが操作スイッチ群5、マイク10、リモコン12などを介して入力した経路施設P(図2参照)の位置(座標)を検索する(ステップB1:施設位置検索手段)。なお、この経路施設の位置の検索では、検索方法として、音声認識検索、名称検索、50音検索などを選択できる。音声認識検索は、ユーザーが入力した音声に基づいて施設の位置を検索し決定する周知の方法である。名称検索は、ユーザーが入力した施設の名称に基づいて施設の位置を検索し決定する周知の方法である。50音検索は、施設名称データベースから施設の位置を検索し決定する周知の方法である。
【0026】
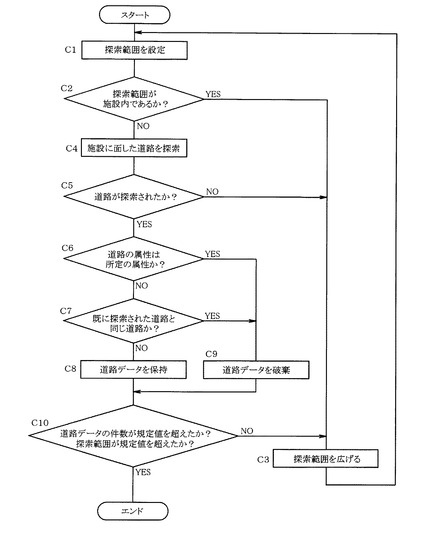
制御回路2は、経路施設Pの位置を検索して特定すると、道路探索処理を実行する(ステップB2:道路探索手段)。この道路探索処理は、検索された経路施設Pの位置に基づいて、当該経路施設Pに面した道路(リンク)を施設隣接道路として探索する処理である。図5は、この道路探索処理の内容を示すフローチャートである。
制御回路2は、道路の探索範囲(入力された経路施設Pからの半径)を設定する(ステップC1)。この探索範囲は、ユーザーが入力した設定値に基づいて設定するようにしてもよいし、制御プログラムに予め記憶した設定値に基づいて設定するようにしてもよい。次に、制御回路2は、設定した探索範囲が経路施設P内であるか否かを判断する(ステップC2)。なお、施設内とは、例えば、その施設の駐車場などを含む範囲、即ち、その施設の敷地内の範囲を含む。
【0027】
制御回路2は、探索範囲が経路施設P内であれば(ステップC2:YES)、探索範囲をさらに広げる(ステップC3)。一方、制御回路2は、探索範囲が経路施設P内でなければ、即ち、探索範囲が経路施設P外であれば(ステップC2:NO)、その探索範囲内の道路のうち、その経路施設Pに面した道路、つまり、施設隣接道路を探索する(ステップC4)。なお、施設隣接道路とは、その施設(敷地)に隣接した道路のみならず、その施設の近傍の道路を含む。そして、制御回路2は、施設隣接道路(経路施設Pに面した道路)が探索されたか否かを判断する(ステップC5)。
制御回路2は、施設隣接道路が探索されなかった場合には(ステップC5:NO)、探索範囲をさらに広げる(ステップC3)。一方、制御回路2は、施設隣接道路(この場合、図2に示す道路R1,R2)が探索された場合には(ステップC5:YES)、探索された施設隣接道路R1,R2の属性が所定の属性であるか否かを判定する(ステップC6)。この場合、所定の属性として、高速道路および細街路が設定されている。
【0028】
制御回路2は、探索された施設隣接道路R1,R2の属性が所定の属性でない場合には(ステップC6:NO)、その道路が、既に探索された施設隣接道路と同じ道路であるか否かを判断する(ステップC7)。ここで、既に探索された施設隣接道路と同じ道路とは、前回の探索範囲において探索された施設隣接道路と全く同じ道路のほか、道路名は異なるが前回の探索範囲において探索された施設隣接道路の延長上に設けられた道路を含む。
制御回路2は、探索された施設隣接道路R1,R2が既に探索された施設隣接道路と同じ道路でない場合には(ステップC7:NO)、それら施設隣接道路R1,R2のデータ(道路データ)を保持し(ステップC8)、ステップC10に移行する。
【0029】
なお、制御回路2は、探索された施設隣接道路R1,R2の属性が所定の属性(この場合、高速道路または細街路)である場合(ステップC6:YES)には、それら施設隣接道路R1,R2のデータを破棄し(ステップC9)、ステップC10に移行する。高速道路は、一般道路の上に重なって設けられている場合がある。そのため、高速道路下の一般道路を走行している車両に対して高速道路に入るように案内してしまうことを防止するためである。細街路は、車両が通行し難い道路であり、案内する道路として不適切な場合がある。そのため、このような細街路に案内してしまうことを防止するためである。
【0030】
また、制御回路2は、探索された施設隣接道路R1,R2が既に探索された施設隣接道路と同じ道路である場合(ステップC7:YES)には、それら施設隣接道路R1,R2のデータを破棄し(ステップC9)、ステップC10に移行する。即ち、制御回路2は、同一の施設隣接道路のデータを重複して保持しないようになっている。
ステップC10では、制御回路2は、保持した道路データの件数(この場合、2件)が規定値を超えたか否か、および、探索範囲が規定値を超えたか否かを判断する。なお、これらの規定値は、ユーザーが入力した設定値に基づいて設定するようにしてもよいし、制御プログラムに予め記憶した設定値に基づいて設定するようにしてもよい。
【0031】
制御回路2は、道路データの件数が規定値を超えておらず、且つ、探索範囲が規定値を超えていなければ(ステップC10:NO)、探索範囲をさらに広げる(ステップC3)。一方、制御回路2は、道路データの件数が規定値を超えた場合、または、探索範囲が規定値を超えた場合(ステップC10:YES)には、この処理(道路探索処理)を終了する。
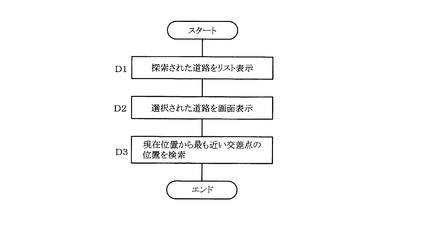
制御回路2は、道路探索処理を終了すると、道路選択処理(図4のステップB3参照)を実行する。図6は、この道路選択処理の内容を示すフローチャートである。
制御回路2は、道路探索処理によって探索された施設隣接道路(この場合、図2に示す経路施設Pに面した道路R1,R2)を、リスト表示する(ステップD1)。これにより、ユーザーは、リスト表示された複数の施設隣接道路の中から任意の道路(この場合、自分が知っている道路、或いは、走行したい道路)を選択することができる。ここで、例えば、ユーザーが道路R1を選択すると、制御回路2は、その選択された道路R1を画面の地図上に強調表示する(ステップD2)。これにより、ユーザーは、選択した道路R1を地図上で確認することができる。なお、ユーザーが道路R2を選択した場合には、制御回路2は、その道路R2を強調表示する。
【0032】
ユーザーは、選択した道路R1が希望する道路であれば、その道路R1を、例えば操作スイッチ群5が有する確定ボタン(図示せず)によって確定する。制御回路2は、道路が確定されると、その道路R1において、車両の現在位置Nから最も近い交差点(この場合、図2に示す交差点C)の位置(座標)を算出し(ステップD3)、この処理(道路選択処理)を終了する。そして、道路検索処理(図4参照)を終了する。
【0033】
制御回路2は、道路検索処理を終了すると、経路探索処理を実行する(図3のステップA2:経路探索手段)。この経路探索処理では、制御回路2は、図2に示すように、車両の現在位置Nから、確定された道路R1における最も近い交差点Cまでの経路S(この場合、最短経路)を探索する。そして、制御回路2は、その経路Sに基づいて、車両の現在位置Nから施設隣接道路R1の交差点Cまでの車両の経路案内を開始する(ステップA3:経路案内手段)。
【0034】
以上に説明したように本実施形態によれば、車両の現在位置Nから、ユーザーが入力した経路施設Pに面した道路R1のうち現在位置Nから最も近い交差点Cまでの最短経路Sが探索され、その経路Sに基づいて車両の経路案内が行われる。従って、指定したい道路名(この場合、道路R1の名称)、或いは、指定したい道路上の交差点名(この場合、交差点Cの名称)をユーザーが知らない場合であっても、その道路R1に面した経路施設Pを入力することによって当該道路R1や当該道路R1上の交差点Cを特定することができ、その道路R1までの経路案内、さらには、その道路R1上における現在位置Nから最も近い交差点Cまでの経路案内を行うことができる。
【0035】
また、目的地ではなく通過点までの経路案内を行う車両用ナビゲーション装置1において、制御回路2は、その通過点として、目的地Gまでの途中に存する道路または目的地Gの近傍に存する道路(この場合、施設隣接道路である道路R1)を特定する。これにより、車両の現在位置Nから目的地Gまでの経路案内を行う構成に比べ、経路を算出するための負荷を軽減することができ、スペックが低いCPU19を用いた制御回路2であっても対応することができる。
さらに、その施設隣接道路として、既知の施設に面した道路を指定することができる。そのため、通過点として幹線道路などの特定の通過点しか指定できない従来のものとは異なり、ユーザーに馴染みのある道路を通過点として設定することができる。
【0036】
(第2の実施形態)
次に、本発明の第2の実施形態について図7から図9を参照しながら説明する。本実施形態は、道路選択処理の内容が上述の第1の実施形態と異なる。以下、上述の第1の実施形態と異なる点のみを説明する。
図7に示すように、本実施形態では、制御回路2は、運転履歴データベース31(通過履歴記憶手段に相当)を備えている。この運転履歴データベース31には、この場合、少なくとも、車両が過去に通過した道路(道路名)と、その道路を通過した回数(通過回数)と、その道路を通過した区間(通過区間)が運転履歴(通過履歴に相当)として記憶される。また、制御回路2は、CPU19に制御プログラムを実行させることにより、探索された施設に面した道路(施設隣接道路)が車両が過去に通過した道路であるか否かを判断する判断手段としての機能を備える。
【0037】
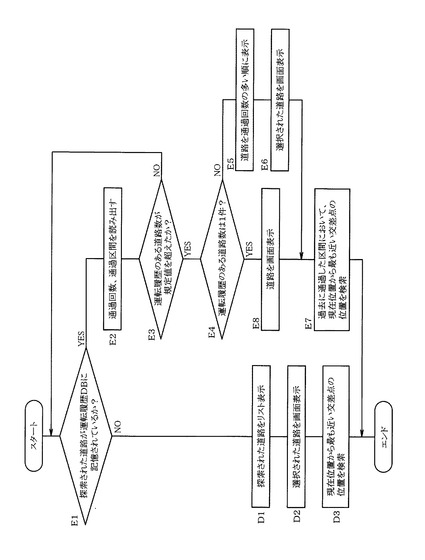
次に、本実施形態の作用について説明する。図9は、本実施形態において制御回路2が実行する道路選択処理の内容を示すフローチャートである。
制御回路2は、道路探索処理によって探索された道路(図8に示す施設隣接道路R1,R2)が運転履歴データベース31に記憶されているか否かを判断する(ステップE1:判断手段)。制御回路2は、探索された道路R1,R2が運転履歴データベース31に記憶されていない場合には(ステップE1:NO)、上述の第1の実施形態と同様に、ステップD1,D2,D3(図6参照)の処理を実行する。
【0038】
一方、制御回路2は、探索された道路R1,R2が運転履歴データベース31に記憶されている場合には(ステップE1:YES)、それらの道路R1,R2の通過回数および通過区間を、それぞれ運転履歴データベース31から読み出す(ステップE2)。次に、制御回路2は、運転履歴のある道路(運転履歴データベース31に記憶されており、その道路に対応する通過回数および通過区間を読み出した道路)の数(この場合、2本)が規定値を超えたか否かを判断する(ステップE3)。なお、この規定値は、ユーザーが入力した設定値に基づいて設定するようにしてもよいし、制御プログラムに予め記憶した設定値に基づいて設定するようにしてもよい。
【0039】
制御回路2は、運転履歴のある道路の数が規定値を超えていなければ(ステップE3:NO)、ステップE1に移行する。一方、制御回路2は、運転履歴のある道路の数が規定値を超えた場合(ステップE3:YES)には、運転履歴のある道路の数が1件であるか否かを判断する(ステップE4)。
制御回路2は、運転履歴のある道路の数が1件でない場合(ステップE4:NO)、それらの道路R1,R2を、通過回数の多い順にリスト表示する(ステップE5)。これにより、ユーザーは、リスト表示された複数の道路の中から任意の道路(この場合、例えば、自分が知っている道路であって、且つ、通過頻度が多い道路)を選択することができる。ここで、例えば、ユーザーが道路R1を選択すると、制御回路2は、その選択された道路R1を画面の地図上に強調表示する(ステップE6)。
【0040】
ユーザーは、選択した道路R1を地図上で確認し、希望する道路であれば、その道路R1を、例えば確定ボタン(図示せず)によって確定する。制御回路2は、道路が確定されると、運転履歴データベース31から読み出した通過区間に基づいて、その道路R1において車両が過去に通過した区間(この場合、図8に示す区間L)を特定する。そして、制御回路2は、その特定した区間L内において、車両の現在位置Nから最も近い交差点(この場合、図8に示す交差点C)の位置を算出し(ステップE7)、この処理(道路選択処理)を終了する。
【0041】
なお、制御回路2は、運転履歴のある道路の数が1件である場合(ステップE4:YES)、その道路を画面の地図上に強調表示する(ステップE8)。ユーザーは、表示された道路が希望する道路であれば、その道路を、例えば確定ボタン(図示せず)によって確定する。制御回路2は、道路が確定されると、その道路における過去に通過した区間を特定し、ステップE7に移行して、その特定した区間における最も近い交差点の位置を算出する。
【0042】
以上に説明したように本実施形態によれば、ユーザーが入力した経路施設Pに面した施設隣接道路R1のうち車両が過去に通過した区間Lが、運転履歴データベース31が記憶している運転履歴に基づいて特定され、その区間L内において、車両の現在位置Nから最も近い交差点Cまでの経路Sが探索される。即ち、経路施設Pに面した施設隣接道路R1が過去に通過した道路であるか否かも考慮して経路Sが探索されるので、ユーザーに馴染みのある経路に基づいて車両の経路案内を行うことができる。
【0043】
(その他の実施形態)
本発明は、上述した各実施形態にのみ限定されるものではなく、例えば次のように変形または拡張することができる。
制御回路2は、現在位置Nから最も近い交差点として検索した交差点Cが走行不能である場合(例えば、交差点Cが工事中である場合や、交差点C内またはその近傍で事故などが発生している場合)には、代替の交差点(例えば、交差点Cの次に近い交差点や、より目的地G側に近い交差点)までの経路を案内するようにするとよい。
この場合、特に第2の実施形態においては、代替の交差点が過去に通過した区間L外に存在する場合(区間L内に存在しない場合)も生じ得る。その場合には、制御回路2は、区間L外の代替交差点までの経路を設定し、過去に通過したことがない区間を走行する経路であること(例えば、「道路R1の延長上の交差点ですが、過去に通過したことがない区間を走行します」といったメッセージ)を、表示装置7の表示画面、或いは、スピーカ8を介して報知するようにするとよい。
【符号の説明】
【0044】
図面中、1は車両用ナビゲーション装置、2は制御回路(施設位置検索手段、道路探索手段、経路探索手段、経路案内手段、判断手段)、3は位置検出器(現在位置検出手段)、操作スイッチ群5(入力手段)、マイク10(入力手段)、リモコン12(入力手段)、31は運転履歴データベース(通過履歴記憶手段)を示す。
【技術分野】
【0001】
本発明は、目的地ではなく通過点までの経路案内を行う車両用ナビゲーション装置に関する。
【背景技術】
【0002】
車両用ナビゲーション装置においては、運転者などのユーザーが目的地を入力して設定するのみで、車両の現在位置から目的地までの経路を探索し案内する。ところで、ユーザーによっては、通過点、例えば、ある特定の道路まで到達できれば、そこから目的地までの経路なら知っている場合がある。このような場合、車両の現在位置からその道路までの経路案内があれば十分であり、その道路から目的地までの経路案内は不要である。
そこで、近年では、車両の現在位置から目的地までの経路案内ではなく、車両の現在位置から通過点である特定の道路までの経路案内を行うようにした車両用ナビゲーション装置が考えられている(例えば、特許文献1,2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−117868号公報
【特許文献2】特開2002−350161号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1,2の車両用ナビゲーション装置は、特定の道路として幹線道路、即ち、多くのユーザーが道路名を知っている道路を指定するものである。そのため、ユーザーが幹線道路から目的地までの経路を知っている場合に有用である。
ところで、ユーザーによっては、特定の道路として幹線道路以外の道路を指定したい場合もある。例えば、幹線道路から目的地までの経路は知らないが、幹線道路以外の道路から目的地までの経路なら知っているという場合である。しかし、幹線道路以外の道路では、ユーザーがその道路名を知らない場合も多く、このような場合、その道路を特定の道路として指定することができず、その道路までの経路案内を行うことができない。
【0005】
本発明は、上述の事情に鑑みてなされたものであり、その目的は、指定したい道路名をユーザーが知らない場合であっても、その道路までの経路案内を行うことができる車両用ナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明は、目的地ではなく通過点までの経路案内を行う車両用ナビゲーション装置において、その通過点として、目的地までの途中に存する道路を指定するものである。そして、その道路を特定するための処理に特徴を有する。
即ち、請求項1の発明によれば、現在位置検出手段は、車両の現在位置を検出する。一方、入力手段は、目的地への経路の途中または目的地の近傍に存する既知の施設を経路施設として入力し、施設位置検索手段は、入力手段によって入力された経路施設の位置を検索し、道路探索手段は、施設位置検索手段によって検索された経路施設の位置に基づいて、当該経路施設に面した道路を施設隣接道路として探索する。
【0007】
そして、経路探索手段は、現在位置検出手段によって検出された車両の現在位置から道路探索手段によって探索された施設隣接道路までの経路を探索し、経路案内手段は、経路探索手段によって探索された経路に基づいて、車両の現在位置から施設隣接道路までの車両の経路案内を行う。即ち、目的地への経路の途中または目的地の近傍に存する既知の施設を入力することで、車両の現在位置からその施設に面した道路までの車両の経路案内が行われる。従って、指定したい道路名をユーザーが知らない場合であっても、その道路に面した施設を入力することによって当該道路を特定することができ、車両の現在位置からその道路までの経路案内を行うことができる。
【0008】
請求項2の発明によれば、通過履歴記憶手段は、車両が過去に通過した道路を通過履歴として記憶する。判断手段は、道路探索手段によって探索された施設隣接道路、つまり、経路施設に面した道路が過去に通過した道路であるか否かを、通過履歴記憶手段によって記憶された通過履歴に基づいて判断する。これにより、経路施設に面した道路が過去に通過した道路であるか否かも考慮して、車両の現在位置からその道路までの経路を探索することができ、ユーザーに馴染みのある経路に基づいて車両の経路案内を行うことができる。
【図面の簡単な説明】
【0009】
【図1】本発明の第1の実施形態に係るものであり、車両用ナビゲーション装置の電気的構成を示すブロック図
【図2】表示装置の画面の表示例を示す図
【図3】制御内容を示すフローチャート
【図4】道路検索処理の内容を示すフローチャート
【図5】道路探索処理の内容を示すフローチャート
【図6】道路選択処理の内容を示すフローチャート
【図7】本発明の第2の実施形態に係る図1相当図
【図8】図2相当図
【図9】図6相当図
【発明を実施するための形態】
【0010】
(第1の実施形態)
以下、本発明の第1の実施形態について図1から図6を参照しながら説明する。
図1は、車両用ナビゲーション装置1の電気的構成を概略的に示す機能ブロック図である。車両用ナビゲーション装置1は、マイコンを主体として構成された制御回路2と、車両の現在位置を検出するための位置検出器3と、地図データ入力器4と、操作スイッチ群5と、外部メモリインターフェイス(I/F)6と、表示装置7と、スピーカ8が接続された音声コントローラ9と、マイク10から入力された音声を認識する音声認識装置11と、リモコン12との間でコマンドなどの送受信を行うリモコンセンサ13と、例えばVICS(登録商標)センタ15からの種々の交通情報を収受するVICS受信機14とを備えている。なお、制御回路2は、施設位置検索手段、道路探索手段、経路探索手段、経路案内手段に相当し、位置検出器3は、現在位置検出手段に相当し、操作スイッチ群5、マイク10、リモコン12などの各種の入力装置は、入力手段に相当する。
【0011】
位置検出器3は、車両の回転角速度を検出するジャイロスコープ16と、車両の走行距離を検出する距離センサ17と、人工衛星からの送信電波に基づいて車両の現在位置を検出(測位)するGPS(Global Positioning System)のためのGPS受信機18とを有している。制御回路2は、各センサ16〜18の検出値を補間しながら用いることにより、車両の現在位置、進行方向、速度、走行距離、現在時刻などを高精度で検出する。なお、精度の高いセンサを用いるのであれば、位置検出器3を上述したセンサ16〜18の一部のみで構成してもよい。また、ステアリングの回転センサや各転動輪の車輪センサなどを用いてもよい。
【0012】
地図データ入力器4は、データ記録メディア(図示せず)から各種データを読み出すドライブ装置により構成されている。地図データ記録メディアとしては、DVDなどの大容量記憶媒体を用いるのが一般的であるが、CD、メモリカード、ハードディスク装置などの記憶媒体を用いてもよい。
データ記録メディアには、経路探索、経路案内などの種々の処理に必要な各種データ(地図データ、目的地データ、施設データ、目印データ、マップマッチング用データ、交通情報を道路データに変換するためのテーブルデータ、背景レイヤのための背景データなど)が記憶されている。また、データ記録メディアには、施設名称を例えば50音順に並べた施設名称データベース、電話番号と施設との対応を示す電話番号データベースなどの各種データベースが設けられている。
【0013】
地図データは、道路地図に関する各種データ(道路(リンク)、道路名、道路形状、道路幅、交差点(ノード)、分岐点(ノード)、行き止まり点(ノード)、信号、踏切、建造物、各種施設、地名、地形など)を含むとともに、その道路地図を表示装置7の画面上に表示するための描画用データを含んでいる。また、各道路については、交通規制(一方通行、進入禁止など)が設定されている場合には、その交通規制情報も併せて記録されている。また、各道路については、その道路の属性情報も併せて記録されている。なお、道路の属性とは、その道路の種類や性質を示す情報であり、例えば、高速道路、細街路、幹線道路、有料道路などが設定されている。
【0014】
目的地データおよび施設データは、交通機関(駅など)、レジャー施設、宿泊施設、公共施設、各種の店舗(小売店、デパート、レストランなど)、住居やマンション、地名などに関する情報からなる。これらのデータには、電話番号、住所、座標(緯度および経度)などのデータが含まれるとともに、施設を示すランドマークなどを、表示装置7の画面上に道路地図に重ね合せて表示するためのデータが含まれている。
【0015】
表示装置7は、地図画面(図2参照)などを表示するための例えばカラー液晶ディスプレイを有しており、例えば運転席近傍に設置される。表示装置7の画面には、車両の現在位置周辺の地図が各種の縮尺で表示されるとともに、その表示に重ね合わせて、車両の現在位置と進行方向とを示す現在地マークN(図2参照)が表示される。また、経路案内の実行時には経路案内用の画面が表示される。さらに、表示装置7には、入力用の画面や、各種のメッセージなども表示される。
【0016】
操作スイッチ群5は、表示装置7の画面の近傍に設けられたメカニカルスイッチや、表示装置7の画面上に設けられるタッチパネルスイッチを含んで構成されている。操作スイッチ群5は、これらのメカニカルスイッチやタッチパネルスイッチの操作に応じた各種の指令信号(コマンド)を制御回路2に与える。
ユーザーは、この操作スイッチ群5を用いて、目的地の入力、目的地検索条件(目的地の検索に必要な情報)の入力、施設の入力、施設検索条件(施設の検索に必要な情報)の入力、通過点の入力、通過点検索条件(通過点の検索に必要な情報)の入力、表示装置7の画面や表示態様の切り替え操作(地図縮尺(詳細度)の変更、メニューの選択、経路探索の開始、経路案内の開始、現在位置の修正、音量調整など)を行う。
【0017】
リモコン12には複数の操作スイッチが設けられている。このリモコン12は、スイッチ操作に応じた各種の指令信号(コマンド)を、リモコンセンサ13を介して制御回路2に送信する。なお、ユーザーは、操作スイッチ群5とリモコン12の何れの操作によっても、制御回路2に同様の機能を実行させることができる。
【0018】
外部メモリI/F6は、図示しない外部メモリ媒体(例えばフラッシュメモリカードなど)が取り付けられるものである。この外部メモリI/F6は、例えば経路案内時に制御回路2が設定した経路のデータ、車両が通過した経路のデータなどを、外部メモリ媒体に書き込んで記憶したり、或いは、外部メモリ媒体に書き込んだデータを読み込むために使用される。
【0019】
音声認識装置11は、マイク10を介して入力された音声と内部に記憶してある認識用の辞書データとを照合し、入力された音声を認識する。音声コントローラ9は、音声認識装置11を制御して音声認識結果を制御回路2に出力するとともに、認識された音声をスピーカ8を介してトークバック出力する。また、制御回路2からの音声出力指令に基づいて音声出力信号をスピーカ8に出力する。スピーカ8から出力される音声は、経路案内に関する音声、操作説明に関する音声、上記のトークバック音声などである。
【0020】
制御回路2は、CPU19、RAM、ROM、EEPROM、フラッシュメモリなどからなるメモリ20、I/Oインターフェース21などを備えて構成されており、ナビゲーション動作を制御する機能を有している。制御回路2は、メモリ20に記憶された制御プログラムをCPU19に実行させることにより、経路探索、経路案内などを行う。
【0021】
経路探索の機能は、推奨する走行経路を自動計算するものであり、その手法としては例えばダイクストラ法が用いられる。
経路案内の機能は、走行経路に沿って移動可能なように、表示装置7の画面に現在地周辺の道路地図を表示するとともに、現在地マークN(図2参照)を道路地図に重ね合わせて表示する機能である。この場合、制御回路2は、現在地マークNを車両の走行に伴って地図上を移動させながら表示し、地図を車両の位置に応じてスクロールさせながら表示する。このとき、制御回路2は、現在地マークN(車両の現在位置)を画面の道路上に合わせるマップマッチングを行う。
【0022】
また、制御回路2は、操作スイッチ群5やリモコンセンサ13を通じて入力されたコマンドに基づいて、周知の地図表示機能、電話番号検索機能、郵便番号検索機能、マップコード(登録商標)のような固有コードを利用した検索機能、50音検索機能、ジャンル別検索機能、最寄り施設検索機能、目的地登録機能、地点登録機能など、多種多様な支援機能に係る処理を実行する。
【0023】
上記構成の車両用ナビゲーション装置1は、車両の出発地(現在位置)から目的地までの経路案内のみならず、車両の現在位置から特定の道路(ユーザーが指定した施設に面した道路)までの経路案内を行う。このような特定の道路までの経路案内は、例えば、ユーザーが、特定の道路R1から目的地Gまでの経路F(図2参照)なら知っているが、車両の現在位置Nから特定の道路R1までの経路S(図2参照)は知らないといった場合に有効である。さらに、上記構成の車両用ナビゲーション装置1は、指定したい道路R1の名称をユーザーが知らない場合であっても、その道路R1を特定の道路として設定できるようになっている。次に、この特定の道路までの経路案内ついて図3から図6を参照しながら説明する。図3は、制御回路2が実行する経路案内の制御内容を示すフローチャートである。
【0024】
制御回路2は、まず、道路検索処理を実行する(ステップA1)。図4は、この道路検索処理の内容を示すフローチャートである。なお、この道路検索処理では、検索方法として、施設周辺道路検索、道路名検索などを選択できる。施設周辺道路検索は、ユーザーが操作スイッチ群5、マイク10、リモコン12などを介して入力した経路施設に面した道路を検索する方法である。なお、経路施設とは、目的地への経路の途中または目的地の近傍に存する施設であって、ユーザーが、その施設名、所在位置などを既に知っている施設のことをいう。ユーザーは、例えば、過去に行ったことがある施設、インターネットや情報誌などを通じて知った施設などを、経路施設として入力する。道路名検索は、ユーザーが操作スイッチ群5、マイク10、リモコン12などを介して入力した道路名の道路を検索する周知の方法である。以下、施設周辺道路検索の内容のみを説明し、道路名検索の内容の説明は省略する。
【0025】
施設周辺道路検索が選択されると、制御回路2は、ユーザーが操作スイッチ群5、マイク10、リモコン12などを介して入力した経路施設P(図2参照)の位置(座標)を検索する(ステップB1:施設位置検索手段)。なお、この経路施設の位置の検索では、検索方法として、音声認識検索、名称検索、50音検索などを選択できる。音声認識検索は、ユーザーが入力した音声に基づいて施設の位置を検索し決定する周知の方法である。名称検索は、ユーザーが入力した施設の名称に基づいて施設の位置を検索し決定する周知の方法である。50音検索は、施設名称データベースから施設の位置を検索し決定する周知の方法である。
【0026】
制御回路2は、経路施設Pの位置を検索して特定すると、道路探索処理を実行する(ステップB2:道路探索手段)。この道路探索処理は、検索された経路施設Pの位置に基づいて、当該経路施設Pに面した道路(リンク)を施設隣接道路として探索する処理である。図5は、この道路探索処理の内容を示すフローチャートである。
制御回路2は、道路の探索範囲(入力された経路施設Pからの半径)を設定する(ステップC1)。この探索範囲は、ユーザーが入力した設定値に基づいて設定するようにしてもよいし、制御プログラムに予め記憶した設定値に基づいて設定するようにしてもよい。次に、制御回路2は、設定した探索範囲が経路施設P内であるか否かを判断する(ステップC2)。なお、施設内とは、例えば、その施設の駐車場などを含む範囲、即ち、その施設の敷地内の範囲を含む。
【0027】
制御回路2は、探索範囲が経路施設P内であれば(ステップC2:YES)、探索範囲をさらに広げる(ステップC3)。一方、制御回路2は、探索範囲が経路施設P内でなければ、即ち、探索範囲が経路施設P外であれば(ステップC2:NO)、その探索範囲内の道路のうち、その経路施設Pに面した道路、つまり、施設隣接道路を探索する(ステップC4)。なお、施設隣接道路とは、その施設(敷地)に隣接した道路のみならず、その施設の近傍の道路を含む。そして、制御回路2は、施設隣接道路(経路施設Pに面した道路)が探索されたか否かを判断する(ステップC5)。
制御回路2は、施設隣接道路が探索されなかった場合には(ステップC5:NO)、探索範囲をさらに広げる(ステップC3)。一方、制御回路2は、施設隣接道路(この場合、図2に示す道路R1,R2)が探索された場合には(ステップC5:YES)、探索された施設隣接道路R1,R2の属性が所定の属性であるか否かを判定する(ステップC6)。この場合、所定の属性として、高速道路および細街路が設定されている。
【0028】
制御回路2は、探索された施設隣接道路R1,R2の属性が所定の属性でない場合には(ステップC6:NO)、その道路が、既に探索された施設隣接道路と同じ道路であるか否かを判断する(ステップC7)。ここで、既に探索された施設隣接道路と同じ道路とは、前回の探索範囲において探索された施設隣接道路と全く同じ道路のほか、道路名は異なるが前回の探索範囲において探索された施設隣接道路の延長上に設けられた道路を含む。
制御回路2は、探索された施設隣接道路R1,R2が既に探索された施設隣接道路と同じ道路でない場合には(ステップC7:NO)、それら施設隣接道路R1,R2のデータ(道路データ)を保持し(ステップC8)、ステップC10に移行する。
【0029】
なお、制御回路2は、探索された施設隣接道路R1,R2の属性が所定の属性(この場合、高速道路または細街路)である場合(ステップC6:YES)には、それら施設隣接道路R1,R2のデータを破棄し(ステップC9)、ステップC10に移行する。高速道路は、一般道路の上に重なって設けられている場合がある。そのため、高速道路下の一般道路を走行している車両に対して高速道路に入るように案内してしまうことを防止するためである。細街路は、車両が通行し難い道路であり、案内する道路として不適切な場合がある。そのため、このような細街路に案内してしまうことを防止するためである。
【0030】
また、制御回路2は、探索された施設隣接道路R1,R2が既に探索された施設隣接道路と同じ道路である場合(ステップC7:YES)には、それら施設隣接道路R1,R2のデータを破棄し(ステップC9)、ステップC10に移行する。即ち、制御回路2は、同一の施設隣接道路のデータを重複して保持しないようになっている。
ステップC10では、制御回路2は、保持した道路データの件数(この場合、2件)が規定値を超えたか否か、および、探索範囲が規定値を超えたか否かを判断する。なお、これらの規定値は、ユーザーが入力した設定値に基づいて設定するようにしてもよいし、制御プログラムに予め記憶した設定値に基づいて設定するようにしてもよい。
【0031】
制御回路2は、道路データの件数が規定値を超えておらず、且つ、探索範囲が規定値を超えていなければ(ステップC10:NO)、探索範囲をさらに広げる(ステップC3)。一方、制御回路2は、道路データの件数が規定値を超えた場合、または、探索範囲が規定値を超えた場合(ステップC10:YES)には、この処理(道路探索処理)を終了する。
制御回路2は、道路探索処理を終了すると、道路選択処理(図4のステップB3参照)を実行する。図6は、この道路選択処理の内容を示すフローチャートである。
制御回路2は、道路探索処理によって探索された施設隣接道路(この場合、図2に示す経路施設Pに面した道路R1,R2)を、リスト表示する(ステップD1)。これにより、ユーザーは、リスト表示された複数の施設隣接道路の中から任意の道路(この場合、自分が知っている道路、或いは、走行したい道路)を選択することができる。ここで、例えば、ユーザーが道路R1を選択すると、制御回路2は、その選択された道路R1を画面の地図上に強調表示する(ステップD2)。これにより、ユーザーは、選択した道路R1を地図上で確認することができる。なお、ユーザーが道路R2を選択した場合には、制御回路2は、その道路R2を強調表示する。
【0032】
ユーザーは、選択した道路R1が希望する道路であれば、その道路R1を、例えば操作スイッチ群5が有する確定ボタン(図示せず)によって確定する。制御回路2は、道路が確定されると、その道路R1において、車両の現在位置Nから最も近い交差点(この場合、図2に示す交差点C)の位置(座標)を算出し(ステップD3)、この処理(道路選択処理)を終了する。そして、道路検索処理(図4参照)を終了する。
【0033】
制御回路2は、道路検索処理を終了すると、経路探索処理を実行する(図3のステップA2:経路探索手段)。この経路探索処理では、制御回路2は、図2に示すように、車両の現在位置Nから、確定された道路R1における最も近い交差点Cまでの経路S(この場合、最短経路)を探索する。そして、制御回路2は、その経路Sに基づいて、車両の現在位置Nから施設隣接道路R1の交差点Cまでの車両の経路案内を開始する(ステップA3:経路案内手段)。
【0034】
以上に説明したように本実施形態によれば、車両の現在位置Nから、ユーザーが入力した経路施設Pに面した道路R1のうち現在位置Nから最も近い交差点Cまでの最短経路Sが探索され、その経路Sに基づいて車両の経路案内が行われる。従って、指定したい道路名(この場合、道路R1の名称)、或いは、指定したい道路上の交差点名(この場合、交差点Cの名称)をユーザーが知らない場合であっても、その道路R1に面した経路施設Pを入力することによって当該道路R1や当該道路R1上の交差点Cを特定することができ、その道路R1までの経路案内、さらには、その道路R1上における現在位置Nから最も近い交差点Cまでの経路案内を行うことができる。
【0035】
また、目的地ではなく通過点までの経路案内を行う車両用ナビゲーション装置1において、制御回路2は、その通過点として、目的地Gまでの途中に存する道路または目的地Gの近傍に存する道路(この場合、施設隣接道路である道路R1)を特定する。これにより、車両の現在位置Nから目的地Gまでの経路案内を行う構成に比べ、経路を算出するための負荷を軽減することができ、スペックが低いCPU19を用いた制御回路2であっても対応することができる。
さらに、その施設隣接道路として、既知の施設に面した道路を指定することができる。そのため、通過点として幹線道路などの特定の通過点しか指定できない従来のものとは異なり、ユーザーに馴染みのある道路を通過点として設定することができる。
【0036】
(第2の実施形態)
次に、本発明の第2の実施形態について図7から図9を参照しながら説明する。本実施形態は、道路選択処理の内容が上述の第1の実施形態と異なる。以下、上述の第1の実施形態と異なる点のみを説明する。
図7に示すように、本実施形態では、制御回路2は、運転履歴データベース31(通過履歴記憶手段に相当)を備えている。この運転履歴データベース31には、この場合、少なくとも、車両が過去に通過した道路(道路名)と、その道路を通過した回数(通過回数)と、その道路を通過した区間(通過区間)が運転履歴(通過履歴に相当)として記憶される。また、制御回路2は、CPU19に制御プログラムを実行させることにより、探索された施設に面した道路(施設隣接道路)が車両が過去に通過した道路であるか否かを判断する判断手段としての機能を備える。
【0037】
次に、本実施形態の作用について説明する。図9は、本実施形態において制御回路2が実行する道路選択処理の内容を示すフローチャートである。
制御回路2は、道路探索処理によって探索された道路(図8に示す施設隣接道路R1,R2)が運転履歴データベース31に記憶されているか否かを判断する(ステップE1:判断手段)。制御回路2は、探索された道路R1,R2が運転履歴データベース31に記憶されていない場合には(ステップE1:NO)、上述の第1の実施形態と同様に、ステップD1,D2,D3(図6参照)の処理を実行する。
【0038】
一方、制御回路2は、探索された道路R1,R2が運転履歴データベース31に記憶されている場合には(ステップE1:YES)、それらの道路R1,R2の通過回数および通過区間を、それぞれ運転履歴データベース31から読み出す(ステップE2)。次に、制御回路2は、運転履歴のある道路(運転履歴データベース31に記憶されており、その道路に対応する通過回数および通過区間を読み出した道路)の数(この場合、2本)が規定値を超えたか否かを判断する(ステップE3)。なお、この規定値は、ユーザーが入力した設定値に基づいて設定するようにしてもよいし、制御プログラムに予め記憶した設定値に基づいて設定するようにしてもよい。
【0039】
制御回路2は、運転履歴のある道路の数が規定値を超えていなければ(ステップE3:NO)、ステップE1に移行する。一方、制御回路2は、運転履歴のある道路の数が規定値を超えた場合(ステップE3:YES)には、運転履歴のある道路の数が1件であるか否かを判断する(ステップE4)。
制御回路2は、運転履歴のある道路の数が1件でない場合(ステップE4:NO)、それらの道路R1,R2を、通過回数の多い順にリスト表示する(ステップE5)。これにより、ユーザーは、リスト表示された複数の道路の中から任意の道路(この場合、例えば、自分が知っている道路であって、且つ、通過頻度が多い道路)を選択することができる。ここで、例えば、ユーザーが道路R1を選択すると、制御回路2は、その選択された道路R1を画面の地図上に強調表示する(ステップE6)。
【0040】
ユーザーは、選択した道路R1を地図上で確認し、希望する道路であれば、その道路R1を、例えば確定ボタン(図示せず)によって確定する。制御回路2は、道路が確定されると、運転履歴データベース31から読み出した通過区間に基づいて、その道路R1において車両が過去に通過した区間(この場合、図8に示す区間L)を特定する。そして、制御回路2は、その特定した区間L内において、車両の現在位置Nから最も近い交差点(この場合、図8に示す交差点C)の位置を算出し(ステップE7)、この処理(道路選択処理)を終了する。
【0041】
なお、制御回路2は、運転履歴のある道路の数が1件である場合(ステップE4:YES)、その道路を画面の地図上に強調表示する(ステップE8)。ユーザーは、表示された道路が希望する道路であれば、その道路を、例えば確定ボタン(図示せず)によって確定する。制御回路2は、道路が確定されると、その道路における過去に通過した区間を特定し、ステップE7に移行して、その特定した区間における最も近い交差点の位置を算出する。
【0042】
以上に説明したように本実施形態によれば、ユーザーが入力した経路施設Pに面した施設隣接道路R1のうち車両が過去に通過した区間Lが、運転履歴データベース31が記憶している運転履歴に基づいて特定され、その区間L内において、車両の現在位置Nから最も近い交差点Cまでの経路Sが探索される。即ち、経路施設Pに面した施設隣接道路R1が過去に通過した道路であるか否かも考慮して経路Sが探索されるので、ユーザーに馴染みのある経路に基づいて車両の経路案内を行うことができる。
【0043】
(その他の実施形態)
本発明は、上述した各実施形態にのみ限定されるものではなく、例えば次のように変形または拡張することができる。
制御回路2は、現在位置Nから最も近い交差点として検索した交差点Cが走行不能である場合(例えば、交差点Cが工事中である場合や、交差点C内またはその近傍で事故などが発生している場合)には、代替の交差点(例えば、交差点Cの次に近い交差点や、より目的地G側に近い交差点)までの経路を案内するようにするとよい。
この場合、特に第2の実施形態においては、代替の交差点が過去に通過した区間L外に存在する場合(区間L内に存在しない場合)も生じ得る。その場合には、制御回路2は、区間L外の代替交差点までの経路を設定し、過去に通過したことがない区間を走行する経路であること(例えば、「道路R1の延長上の交差点ですが、過去に通過したことがない区間を走行します」といったメッセージ)を、表示装置7の表示画面、或いは、スピーカ8を介して報知するようにするとよい。
【符号の説明】
【0044】
図面中、1は車両用ナビゲーション装置、2は制御回路(施設位置検索手段、道路探索手段、経路探索手段、経路案内手段、判断手段)、3は位置検出器(現在位置検出手段)、操作スイッチ群5(入力手段)、マイク10(入力手段)、リモコン12(入力手段)、31は運転履歴データベース(通過履歴記憶手段)を示す。
【特許請求の範囲】
【請求項1】
車両の現在位置を検出する現在位置検出手段と、
目的地への経路の途中または前記目的地の近傍に存する既知の施設を経路施設として入力する入力手段と、
前記入力手段によって入力された前記経路施設の位置を検索する施設位置検索手段と、
前記施設位置検索手段によって検索された前記経路施設の位置に基づいて、当該経路施設に面した道路を施設隣接道路として探索する道路探索手段と、
前記現在位置検出手段によって検出された前記車両の現在位置から前記道路探索手段によって探索された前記施設隣接道路までの経路を探索する経路探索手段と、
前記経路探索手段によって探索された前記経路に基づいて、前記車両の現在位置から前記施設隣接道路までの前記車両の経路案内を行う経路案内手段と、
を備えた車両用ナビゲーション装置。
【請求項2】
前記車両が過去に通過した道路を通過履歴として記憶する通過履歴記憶手段と、
前記道路探索手段によって探索された前記施設隣接道路が過去に通過した道路であるか否かを、前記通過履歴記憶手段によって記憶された前記通過履歴に基づいて判断する判断手段と、
を備えた請求項1記載の車両用ナビゲーション装置。
【請求項1】
車両の現在位置を検出する現在位置検出手段と、
目的地への経路の途中または前記目的地の近傍に存する既知の施設を経路施設として入力する入力手段と、
前記入力手段によって入力された前記経路施設の位置を検索する施設位置検索手段と、
前記施設位置検索手段によって検索された前記経路施設の位置に基づいて、当該経路施設に面した道路を施設隣接道路として探索する道路探索手段と、
前記現在位置検出手段によって検出された前記車両の現在位置から前記道路探索手段によって探索された前記施設隣接道路までの経路を探索する経路探索手段と、
前記経路探索手段によって探索された前記経路に基づいて、前記車両の現在位置から前記施設隣接道路までの前記車両の経路案内を行う経路案内手段と、
を備えた車両用ナビゲーション装置。
【請求項2】
前記車両が過去に通過した道路を通過履歴として記憶する通過履歴記憶手段と、
前記道路探索手段によって探索された前記施設隣接道路が過去に通過した道路であるか否かを、前記通過履歴記憶手段によって記憶された前記通過履歴に基づいて判断する判断手段と、
を備えた請求項1記載の車両用ナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−163964(P2011−163964A)
【公開日】平成23年8月25日(2011.8.25)
【国際特許分類】
【出願番号】特願2010−27561(P2010−27561)
【出願日】平成22年2月10日(2010.2.10)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成23年8月25日(2011.8.25)
【国際特許分類】
【出願日】平成22年2月10日(2010.2.10)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]