
車両用ナビゲーション装置
【課題】複数台の車両でグループ走行し、共通の目的地に向かう際、各車両の位置関係を容易に把握することのできる車両用ナビゲーション装置を提供する。
【解決手段】地図情報を記憶する地図情報記憶手段と、自車両の現在位置を検出する現在位置検出手段と、前記自車両の前記現在位置を、前記現在位置に対応する前記地図情報とともに表示する表示手段とを備える車両用ナビゲーション装置において、前記自車両と共通の目的地まで移動する他車両の現在位置を含む他車両情報を取得する他車両情報取得手段と、前記自車両と前記他車両とが合流する合流地点を算出する合流地点算出手段と、前記合流地点に到達後の前記他車両の前記現在位置を、前記自車両の前記現在位置とともに前記表示手段に表示させる制御を行う表示制御手段と、を備える。
【解決手段】地図情報を記憶する地図情報記憶手段と、自車両の現在位置を検出する現在位置検出手段と、前記自車両の前記現在位置を、前記現在位置に対応する前記地図情報とともに表示する表示手段とを備える車両用ナビゲーション装置において、前記自車両と共通の目的地まで移動する他車両の現在位置を含む他車両情報を取得する他車両情報取得手段と、前記自車両と前記他車両とが合流する合流地点を算出する合流地点算出手段と、前記合流地点に到達後の前記他車両の前記現在位置を、前記自車両の前記現在位置とともに前記表示手段に表示させる制御を行う表示制御手段と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用ナビゲーション装置に関するものであり、特に、複数台の車両でグループ走行し、共通の目的地に向かう場合において、各車両の現在位置を地図情報とともに表示するようにした車両用ナビゲーション装置に関するものである。
【背景技術】
【0002】
GPS(Global Positioning System)に代表される全世界航法衛星システム(GNSS:Global Navigation Satellite Systems)を利用して車両の現在位置を検出し、地図情報とともにディスプレイに表示させ、また、現在位置又は所望の出発地から目的地までの経路を探索してディスプレイに表示させ、ユーザを目的地まで案内する車両用ナビゲーション装置が知られている。
【0003】
このような車両用ナビゲーション装置を利用して、複数台の車両によるグループ走行を快適に行うことのできるものが提案されている。
【0004】
例えば、下記の特許文献1(特開平6−282795号公報)に開示された車両用ナビゲーション装置では、複数台の車両でグループ走行して共通の目的地に向かう場合において、他車両から受信した情報に基づき、他車両の現在位置、走行状況等を算定し、自車両の現在位置とともに、他車両の現在位置、走行状況等を表示するようにしている。
【0005】
この特許文献1の発明によれば、一目で他車両の位置、走行状況を把握することができ、目的地が遠方の場合や走行経路が分かり難い場合等においても、円滑なグループ走行を行うことが可能となる。
【0006】
また、下記の特許文献2(特開平9−210701号公報)に開示されたナビゲーション装置では、グループ走行する際、地図の縮尺を設定し、自車両の現在位置及び目的地を同時に表示させるとともに、他車両から他車両位置情報を取得し、他車両の現在位置を表示させるようにしている。そして、各車両の現在位置と目的地との間の距離を計算し、目的地に近い順に順位付けし、その順位を表示させている。
【0007】
この特許文献2の発明によれば、各車両が目的地に対してどのような位置関係にあるのかを容易に把握することが可能となる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平6−282795号公報(段落[0027])
【特許文献2】特開平9−210701号公報(段落[0004]、[0009]、[0010]、[0012]、[0013])
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、上記の特許文献1及び特許文献2の発明では、各車両の現在位置を知ることはできるが、自車両と他車両との走行経路が異なっている場合、車両間の相対的な位置関係を容易に把握することは困難である。例えば、自車両が先に目的地に到達したとき、他車両が目的地に到達するまでの時間を他車両の現在位置から推定することが困難になるという問題点がある。
【0010】
また、車両間の距離が大きく離れている場合、各車両の現在位置を同時に表示しようとすると、地図の縮尺を大きく設定しなければならないため、各車両の現在位置の把握が困難になるだけでなく、各車両間の位置関係の正しい認識が困難になってしまうという問題点がある。
【0011】
本発明は、上記の不具合に鑑みてなされたものであり、複数台の車両でグループ走行し、共通の目的地に向かう際、各車両の位置関係を容易に把握することのできる車両用ナビゲーション装置を提供することを目的とするものである。
【課題を解決するための手段】
【0012】
前記の課題を解決するために、本願の請求項1にかかる発明は、
地図情報を記憶する地図情報記憶手段と、自車両の現在位置を検出する現在位置検出手段と、前記自車両の前記現在位置を、前記現在位置に対応する前記地図情報とともに表示する表示手段とを備える車両用ナビゲーション装置において、
前記自車両と共通の目的地まで移動する他車両の現在位置を含む他車両情報を取得する他車両情報取得手段と、
取得した前記他車両情報に基づき前記自車両と前記他車両とが合流する合流地点を算出する合流地点算出手段と、
前記合流地点に到達後の前記他車両の前記現在位置を、前記自車両の前記現在位置とともに前記表示手段に表示させる制御を行う表示制御手段と、
を備えることを特徴とする。
【0013】
また、本願の請求項2にかかる発明は、請求項1に記載の車両用ナビゲーション装置において、前記表示制御手段は、前記合流地点及び/又は前記目的地を、前記自車両及び前記他車両の前記各現在位置とともに前記表示手段に表示させる制御を行うことを特徴とする。
【0014】
また、本願の請求項3にかかる発明は、請求項1又は2に記載の車両用ナビゲーション装置において、前記表示制御手段は、前記自車両の前記現在位置と前記他車両の前記現在位置との間の距離、及び/又は、前記自車両の前記現在位置と前記他車両の前記現在位置との間を走行するのに要する走行推定時間を前記表示手段に表示させる制御を行うことを特徴とする。
【0015】
また、本願の請求項4にかかる発明は、請求項1〜3のいずれか1項に記載の車両用ナビゲーション装置において、目的地までの前記自車両の経路を探索する経路探索手段を備え、取得する前記他車両情報には、他車両において探索された他車両の経路情報を含み、
前記合流地点算出手段は、探索された前記自車両の前記経路と、取得した前記他車両情報に基づき前記合流地点を算出することを特徴とする。
【発明の効果】
【0016】
請求項1にかかる発明においては、地図情報を記憶する地図情報記憶手段と、自車両の現在位置を検出する現在位置検出手段と、前記自車両の前記現在位置を、前記現在位置に対応する前記地図情報とともに表示する表示手段とを備える車両用ナビゲーション装置において、前記自車両と共通の目的地まで移動する他車両の現在位置を含む他車両情報を取得する他車両情報取得手段と、取得した前記他車両情報に基づき前記自車両と前記他車両とが合流する合流地点を算出する合流地点算出手段と、前記合流地点に到達後の前記他車両の前記現在位置を、前記自車両の前記現在位置とともに前記表示手段に表示させる制御を行う表示制御手段と、を備える。
【0017】
この場合、合流地点に到達した後の目的地までの共通経路上における他車両の現在位置を、自車両の現在位置とともに表示手段に表示させることにより、自車両が他車両よりも先行している場合には、自車両が既に走行した経路上を他車両が走行しているため、各車両の相対的な位置関係を容易に把握することができる。また、他車両が自車両よりも先行している場合には、自車両が合流地点に到達した時点で、各車両の相対的な位置関係を明確に把握することができる。
【0018】
請求項2にかかる発明においては、合流地点及び/又は目的地を、自車両及び他車両の各現在位置とともに表示手段に表示させることにより、各車両に対する共通の地点を基準として位置関係を把握することができる。
【0019】
請求項3にかかる発明においては、自車両の現在位置と他車両の現在位置との間の距離、及び/又は、自車両の現在位置と他車両の現在位置との間を走行するのに要する走行推定時間を表示手段に表示させることにより、各車両の相対的な位置関係を具体的なデータに基づいて正確に把握することができる。
【0020】
請求項4にかかる発明においては、目的地までの前記自車両の経路を探索する経路探索手段を備え、取得する前記他車両情報には、他車両において探索された他車両の経路情報を含み、前記合流地点算出手段は、探索された前記自車両の前記経路と、取得した前記他車両情報に基づき前記合流地点を算出することができる。
【図面の簡単な説明】
【0021】
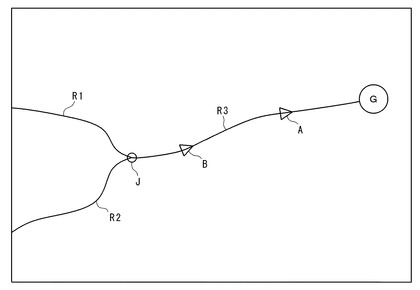
【図1】本発明の実施例にかかる車両用ナビゲーション装置が搭載された2台の車両でグループ走行し、共通の目的地に向かう際の経路の説明図である。
【図2】本発明の実施例にかかる車両用ナビゲーション装置の構成ブロック図である。
【図3】本発明の実施例にかかる車両用ナビゲーション装置が搭載された車両における経路案内のフローチャートである。
【図4】本発明の実施例にかかる車両用ナビゲーション装置における表示画面の説明図である。
【発明を実施するための形態】
【0022】
以下、本発明の具体例を実施例及び図面を用いて詳細に説明する。但し、以下に示す実施例は、本発明の技術的思想を具体化するための車両用ナビゲーション装置を例示するものであって、本発明をこの車両用ナビゲーション装置に特定することを意図するものではなく、特許請求の範囲に含まれるその他の実施例の車両用ナビゲーション装置にも等しく適応し得るものである。
【実施例】
【0023】
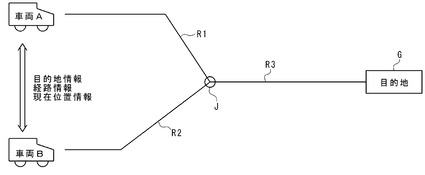
図1は、本発明の実施例にかかる車両用ナビゲーション装置が搭載された2台の車両A、Bによりグループ走行し、共通目的地Gに向かう際の経路R1〜R3の説明図である。
【0024】
車両Aは、経路R1及びR3を通過して共通目的地Gに至る。車両Bは、経路R2及びR3を通過して共通目的地Gに至る。この場合、経路R3は、車両A及びBの共通の経路である。また、経路R1及びR2は、交差点である合流地点Jにおいて合流する。なお、車両A、B間では、後述するように、共通目的地Gを特定する目的地情報、共通目的地Gまでの各車両A、Bの経路の情報、各車両A、Bの現在位置の情報の送受信が行われる。
【0025】
なお、各車両A、Bの経路については、共通目的地Gまでの経路を各車両に搭載されたナビゲーション装置にて探索してもよいし、何れか一方の車両に搭載されたナビゲーション装置で双方の車両A、Bの経路を探索し、探索した経路を他方のナビゲーション装置に送信するようにしてもよい。
【0026】
以下の実施例では、車両A、Bの各経路は、各車両に搭載されたナビゲーション装置で探索されるものとして説明を行う。
【0027】
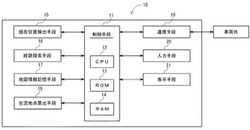
図2は、車両Aに搭載された車両用ナビゲーション装置10の構成を示すブロック図である。なお、車両Bに搭載される車両用ナビゲーション装置も同様に構成される。また、図1に示した車両は2台であるが、本発明は2台の車両に限られるものではなく、任意の複数台であってもよい。
【0028】
制御手段11は、CPU12、ROM13、RAM14を有するマイクロプロセッサなどで構成され、ROM13に記録された制御プログラムに従って車両用ナビゲーション装置10の各部の動作を制御するものである。また、制御手段11は、表示手段21に対する表示画像の制御を行う表示制御手段として機能する。
【0029】
現在位置検出手段15は、所定の時間間隔で、地球上空を周回している複数のGPS衛星から時刻情報を含む電波(衛星信号)を受信して、車両Aの位置情報(GPS測位位置)を算出する。位置は緯度、経度で算出される。なお、車両Aの現在位置は、車両Aに搭載されている加速度センサ、ジャイロセンサなどの角速度センサからなる自律航法手段を用いて算出することもできる。また、GPS衛星から受信した電波に基づき算出した測位位置を自律航法手段を用いて補正して用いることもできる。
【0030】
経路探索手段16は、ユーザが入力手段20を用いて目的地を入力することにより、地図情報記憶手段17に記憶されている地図情報を参照し、現在位置検出手段15が検出した車両Aの現在位置から目的地、又は、ユーザが指定した所望の出発地から目的地に至る最適な経路を探索するものである。なお、経路の探索は、現在位置又は出発地に対応するノードから目的地に対応するノードに至るリンクと、ノードとをダイクストラ法等の各種の手法によって探索し、リンク長(リンクコスト)や所要時間等を累積し、総リンク長(移動距離)又は総所要時間等が最短となる経路を探索し、当該経路に属するノードやリンクを経路データとして提供するものである。
【0031】
地図情報記憶手段17は、道路の分岐地点である交差点等の結節点をノードとする道路ノードデータと、それぞれのノード間を結ぶ経路をリンクとした道路リンクデータと、地形図データとを含む地図情報を記憶している。
【0032】
道路ノードデータには、道路ノード番号、位置座標、接続リンク本数、分岐地点名称等が含まれる他、分岐地点から所定距離だけ離れた案内地点において、右左折、直進等の経路案内を行う経路案内データ及び案内地点の位置座標が記憶されている。
【0033】
道路リンクデータには、始点及び終点となる道路ノード番号、道路種別、ノード間の距離情報であるリンク長(リンクコスト)、所要時間、車線数、車道幅などが含まれる。道路リンクデータには、さらに、リンク属性として橋、トンネル、踏切、料金所、制限速度等のデータが付与される。道路種別とは、高速道路や有料道路の別、国道や都道府県道等の別を含む情報である。
【0034】
地形図データには、海岸線、湖沼、河川形状などの水系データ、行政境界データ、駐車場をはじめとする施設位置、施設形状、施設名称を含む施設データからなる背景データが含まれる。
【0035】
合流地点算出手段18は、図1に示すように、各車両A、Bの車両用ナビゲーション装置10で探索された現在位置又は出発地から共通目的地Gまでの各経路R1〜R3が合流する合流地点Jを算出するものである。各車両A、Bの現在位置又は出発地は、通常は異なっており、共通目的地Gに近づいたある地点において経路R1及びR2が合流して共通の経路R3となる。合流地点算出手段18は、共通の経路R3の開始地点として合流地点Jを算出する。なお、車両A、Bが全く異なる方向から共通目的地Gに移動する場合には、合流地点Jが共通目的地Gとなることも有り得る。
【0036】
通信手段19は、車両Bから、無線通信により車両Bの現在位置及び経路情報を含む車両情報(他車両情報)を受信するものである。また、通信手段19は、車両Bに対して、無線通信により共通目的地Gの情報を送信するとともに、車両Aの現在位置及び経路情報を含む車両情報を送信するものである。
【0037】
入力手段20は、車両用ナビゲーション装置10における操作入力や、経路を探索するための出発地、共通目的地Gの入力を行う各種キー、タッチパネル、リモートコントローラ等から構成される。
【0038】
表示手段21は、地図画像、経路R1〜R3、車両A、Bの現在位置、合流地点J、共通目的地G等をユーザに表示して視認できるようにするためのものであり、液晶ディスプレイなどで構成される。
【0039】
なお、制御手段11には、ナビゲーションに必要な音声ガイダンスを出力するスピーカ(図示せず)を接続することもできる。
【0040】
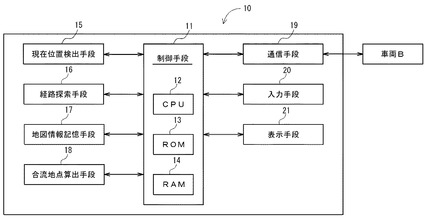
次に、図3に示すフローチャートに基づき、2台の車両A、Bでグループ走行し、共通目的地Gに向かう場合の詳細な処理について説明する。
【0041】
車両Aにおいて、ユーザが入力手段20を操作し、車両A及びBの共通目的地Gを設定するとともに、必要に応じて所望の出発地を設定する(ステップS101)。共通目的地Gが設定されると、制御手段11は、共通目的地Gにかかる情報を、通信手段19を介して車両Bに送信する(ステップS102)。
【0042】
経路探索手段22は、地図情報記憶手段17に記憶されている地図情報に基づき、現在位置検出手段15が検出した車両Aの現在位置、又は、ユーザが指定した出発地から共通目的地Gに至る最適な経路R1、R3を探索する(ステップS103)。
【0043】
すなわち、現在位置検出手段15は、GPS衛星から位置情報を含む電波を受信することにより、車両Aの現在位置を検出する。経路探索手段16は、検出した現在位置に基づき、地図情報記憶手段17から対応する地図情報を抽出し、地図情報を構成するノードデータ及びリンクデータに基づき、例えば、共通目的地Gまでの所要時間が最も短い経路、又は、目的地までの距離が最も短い全経路を最適な経路R1、R3として探索する。
【0044】
探索された車両Aの経路R1、R3は、車両用ナビゲーション装置10の表示手段21に、車両Aの現在位置及び地図情報とともに表示される(ステップS104)。
【0045】
同様にして、車両Aから共通目的地Gにかかる情報を受信した車両Bは、車両Bの現在位置又は指定した出発地から共通目的地Gまでの最適な経路R2、R3を探索し、その経路R2、R3を車両Bの現在位置及び地図情報とともに車両Bのナビゲーション装置の表示手段に表示する。
【0046】
次いで、車両A及びBのユーザは、車両Aの表示手段21及び車両Bの表示手段に表示された経路R1、R3及びR2、R3に従ってグループ走行を開始する(ステップS105)。この場合、車両Aの表示手段21には、車両Aの現在位置を中心とする経路R1、R3の必要な範囲を含む地図画像が表示され、車両Aの走行とともに、地図画像がスクロールされ、表示範囲が移動する。車両Bにおいても同様に、車両Bの走行とともに、現在位置を中心とする経路R2、R3の必要な範囲が表示される。
【0047】
グループ走行が開始されると、車両Aの制御手段11は、通信手段19を介して車両Bに車両情報を要求し、この要求に応じて車両Bから車両情報(他車両情報)を取得する(ステップS106)。車両Bの車両情報には、車両Bの現在位置と、車両Aと同様にして探索した共通目的地Gまでの経路R2、R3にかかる経路情報とが含まれる。なお、制御手段11は、車両Bに対して所定の時間間隔で車両情報を要求し、車両Bの最新の現在位置にかかる情報を含む車両情報を逐次取得する。同様に、車両Bは、車両Aに車両情報を要求し、この要求に応じて車両Aの現在位置及び経路R1、R3にかかる経路情報を逐次取得する。
【0048】
車両Aの合流地点算出手段18は、経路探索手段16により探索した車両Aの経路R1、R3と、通信手段19を介して取得した車両Bの経路R2、R3とに基づき、経路R3の開始地点である合流地点Jを算出する(ステップS107)。この場合、車両A及びBの目的地Gが共通であるため、共通目的地Gと合流地点Jとの間の経路R3は、車両A及びBの共通の経路となる。なお、合流地点Jは、通常は交差点である。車両Bにおいても同様に、合流地点Jが算出されてもよいし、車両Aから車両Bに対して算出した合流地点Jの情報を送信する構成でも構わない。
【0049】
合流地点Jが算出された後、制御手段11は、車両Bの最新の現在位置にかかる情報を逐次取得し、その情報に基づき、車両Bが合流地点Jに到達したか否かを判定する(ステップS108)。車両Bが合流地点Jに到達したものと判定すると(ステップS108、YES)、制御手段11は、表示手段21を制御し、現在、表示手段21に表示されている車両Aの現在位置及び所定範囲の経路R1、R3に代えて、車両Aの現在位置と取得した車両Bの現在位置及び合流地点Jを含む範囲を経路R3を表示させる(ステップS109、図4参照)。車両Bにおいても同様に、車両Aが合流地点Jに到達したものと判定されると、車両Bの現在位置と車両Aの現在位置及び合流地点Jを含む範囲の経路R3を表示させる。
【0050】
車両Aの制御手段11は、車両A、B及び合流地点Jが表示手段21に同時に表示できるように、表示の縮尺を調整する。この場合、車両Bが合流地点Jに到達した後、車両A、B及び合流地点Jを含む必要な範囲のみの地図画像を表示手段21に表示するため、地図の縮尺が必要以上に大きくなることがなく、良好な常態で各車両A及びBの位置を確認することができる。車両Bにおいても同様である。
【0051】
ここで、図4に示すように、車両Aが先に合流地点Jを通過して経路R3に進入した後、車両Bが合流地点Jに到達した場合には、車両Aのユーザは、表示手段21に表示されている合流地点Jの位置(自分が少し前に通過した合流地点Jの位置)と、既に走行している共通の経路R3上を走行する車両Bの位置とから、車両Aと車両Bとの位置関係を容易に推測することができる。このことは、一般に運転者は自車両が合流地点Jを通過してからの経過時間や走行距離は感覚的に把握しており、後から合流地点Jに他の車両が到達したしたことがわかれば、当該他の車両と自車両との間の距離も直感的に認識できるという知見に基づいている。合流地点Jは、交差点のような目印となる地点であるため、記憶に残り易く、その分、位置関係の把握も容易となる。車両Bにおいても同様である。
【0052】
また、車両Bが車両Aよりも先行して合流地点Jに到達した場合、車両Aのユーザは、合流地点Jに到達した後、共通の経路R3上を先行して走行している車両Bとの位置関係を容易に推測することができる。車両Bにおいても同様である。
【0053】
なお、表示手段21には、合流地点J、車両A及びBの現在位置に加えて、共通目的地Gを同時に表示させることにより、各車両A及びBの位置関係を一層具体的に把握することができる。
【0054】
また、車両A及びBが合流地点Jに到達した後、車両A及びBの現在位置間の距離を表示手段21に表示させることにより、車両A及びBの位置関係を具体的なデータに基づいてさらに正確に把握することができる。さらにまた、前記距離を走行するのに要する走行推定時間を算出して表示手段21に表示させることにより、例えば、先行する車両Aに対して後続の車両Bがどの程度遅れているのか、という状況を把握することができる。
【0055】
なお、上記実施例では、2台の車両A及びBによりグループ走行する場合について説明したが、前述のように3台以上の車両でグループ走行する場合にも容易に拡張して適用することができる。また、車両A及びBは、必ずしも共通目的地Gまでの経路探索を行う必要はなく、例えば、先行する車両Aの走行経路の履歴を記憶させておき、後続する車両Bが車両Aの走行経路に進入した地点を合流地点として、表示手段21に車両Bを表示させるようにすることもできる。
【符号の説明】
【0056】
10・・・車両用ナビゲーション装置
11・・・制御手段
15・・・現在位置検出手段
16・・・経路探索手段
17・・・地図情報記憶手段
18・・・合流地点算出手段
19・・・通信手段
20・・・入力手段
21・・・表示手段
G・・・目的地
J・・・合流地点
R1〜R3・・・経路
【技術分野】
【0001】
本発明は、車両用ナビゲーション装置に関するものであり、特に、複数台の車両でグループ走行し、共通の目的地に向かう場合において、各車両の現在位置を地図情報とともに表示するようにした車両用ナビゲーション装置に関するものである。
【背景技術】
【0002】
GPS(Global Positioning System)に代表される全世界航法衛星システム(GNSS:Global Navigation Satellite Systems)を利用して車両の現在位置を検出し、地図情報とともにディスプレイに表示させ、また、現在位置又は所望の出発地から目的地までの経路を探索してディスプレイに表示させ、ユーザを目的地まで案内する車両用ナビゲーション装置が知られている。
【0003】
このような車両用ナビゲーション装置を利用して、複数台の車両によるグループ走行を快適に行うことのできるものが提案されている。
【0004】
例えば、下記の特許文献1(特開平6−282795号公報)に開示された車両用ナビゲーション装置では、複数台の車両でグループ走行して共通の目的地に向かう場合において、他車両から受信した情報に基づき、他車両の現在位置、走行状況等を算定し、自車両の現在位置とともに、他車両の現在位置、走行状況等を表示するようにしている。
【0005】
この特許文献1の発明によれば、一目で他車両の位置、走行状況を把握することができ、目的地が遠方の場合や走行経路が分かり難い場合等においても、円滑なグループ走行を行うことが可能となる。
【0006】
また、下記の特許文献2(特開平9−210701号公報)に開示されたナビゲーション装置では、グループ走行する際、地図の縮尺を設定し、自車両の現在位置及び目的地を同時に表示させるとともに、他車両から他車両位置情報を取得し、他車両の現在位置を表示させるようにしている。そして、各車両の現在位置と目的地との間の距離を計算し、目的地に近い順に順位付けし、その順位を表示させている。
【0007】
この特許文献2の発明によれば、各車両が目的地に対してどのような位置関係にあるのかを容易に把握することが可能となる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平6−282795号公報(段落[0027])
【特許文献2】特開平9−210701号公報(段落[0004]、[0009]、[0010]、[0012]、[0013])
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、上記の特許文献1及び特許文献2の発明では、各車両の現在位置を知ることはできるが、自車両と他車両との走行経路が異なっている場合、車両間の相対的な位置関係を容易に把握することは困難である。例えば、自車両が先に目的地に到達したとき、他車両が目的地に到達するまでの時間を他車両の現在位置から推定することが困難になるという問題点がある。
【0010】
また、車両間の距離が大きく離れている場合、各車両の現在位置を同時に表示しようとすると、地図の縮尺を大きく設定しなければならないため、各車両の現在位置の把握が困難になるだけでなく、各車両間の位置関係の正しい認識が困難になってしまうという問題点がある。
【0011】
本発明は、上記の不具合に鑑みてなされたものであり、複数台の車両でグループ走行し、共通の目的地に向かう際、各車両の位置関係を容易に把握することのできる車両用ナビゲーション装置を提供することを目的とするものである。
【課題を解決するための手段】
【0012】
前記の課題を解決するために、本願の請求項1にかかる発明は、
地図情報を記憶する地図情報記憶手段と、自車両の現在位置を検出する現在位置検出手段と、前記自車両の前記現在位置を、前記現在位置に対応する前記地図情報とともに表示する表示手段とを備える車両用ナビゲーション装置において、
前記自車両と共通の目的地まで移動する他車両の現在位置を含む他車両情報を取得する他車両情報取得手段と、
取得した前記他車両情報に基づき前記自車両と前記他車両とが合流する合流地点を算出する合流地点算出手段と、
前記合流地点に到達後の前記他車両の前記現在位置を、前記自車両の前記現在位置とともに前記表示手段に表示させる制御を行う表示制御手段と、
を備えることを特徴とする。
【0013】
また、本願の請求項2にかかる発明は、請求項1に記載の車両用ナビゲーション装置において、前記表示制御手段は、前記合流地点及び/又は前記目的地を、前記自車両及び前記他車両の前記各現在位置とともに前記表示手段に表示させる制御を行うことを特徴とする。
【0014】
また、本願の請求項3にかかる発明は、請求項1又は2に記載の車両用ナビゲーション装置において、前記表示制御手段は、前記自車両の前記現在位置と前記他車両の前記現在位置との間の距離、及び/又は、前記自車両の前記現在位置と前記他車両の前記現在位置との間を走行するのに要する走行推定時間を前記表示手段に表示させる制御を行うことを特徴とする。
【0015】
また、本願の請求項4にかかる発明は、請求項1〜3のいずれか1項に記載の車両用ナビゲーション装置において、目的地までの前記自車両の経路を探索する経路探索手段を備え、取得する前記他車両情報には、他車両において探索された他車両の経路情報を含み、
前記合流地点算出手段は、探索された前記自車両の前記経路と、取得した前記他車両情報に基づき前記合流地点を算出することを特徴とする。
【発明の効果】
【0016】
請求項1にかかる発明においては、地図情報を記憶する地図情報記憶手段と、自車両の現在位置を検出する現在位置検出手段と、前記自車両の前記現在位置を、前記現在位置に対応する前記地図情報とともに表示する表示手段とを備える車両用ナビゲーション装置において、前記自車両と共通の目的地まで移動する他車両の現在位置を含む他車両情報を取得する他車両情報取得手段と、取得した前記他車両情報に基づき前記自車両と前記他車両とが合流する合流地点を算出する合流地点算出手段と、前記合流地点に到達後の前記他車両の前記現在位置を、前記自車両の前記現在位置とともに前記表示手段に表示させる制御を行う表示制御手段と、を備える。
【0017】
この場合、合流地点に到達した後の目的地までの共通経路上における他車両の現在位置を、自車両の現在位置とともに表示手段に表示させることにより、自車両が他車両よりも先行している場合には、自車両が既に走行した経路上を他車両が走行しているため、各車両の相対的な位置関係を容易に把握することができる。また、他車両が自車両よりも先行している場合には、自車両が合流地点に到達した時点で、各車両の相対的な位置関係を明確に把握することができる。
【0018】
請求項2にかかる発明においては、合流地点及び/又は目的地を、自車両及び他車両の各現在位置とともに表示手段に表示させることにより、各車両に対する共通の地点を基準として位置関係を把握することができる。
【0019】
請求項3にかかる発明においては、自車両の現在位置と他車両の現在位置との間の距離、及び/又は、自車両の現在位置と他車両の現在位置との間を走行するのに要する走行推定時間を表示手段に表示させることにより、各車両の相対的な位置関係を具体的なデータに基づいて正確に把握することができる。
【0020】
請求項4にかかる発明においては、目的地までの前記自車両の経路を探索する経路探索手段を備え、取得する前記他車両情報には、他車両において探索された他車両の経路情報を含み、前記合流地点算出手段は、探索された前記自車両の前記経路と、取得した前記他車両情報に基づき前記合流地点を算出することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の実施例にかかる車両用ナビゲーション装置が搭載された2台の車両でグループ走行し、共通の目的地に向かう際の経路の説明図である。
【図2】本発明の実施例にかかる車両用ナビゲーション装置の構成ブロック図である。
【図3】本発明の実施例にかかる車両用ナビゲーション装置が搭載された車両における経路案内のフローチャートである。
【図4】本発明の実施例にかかる車両用ナビゲーション装置における表示画面の説明図である。
【発明を実施するための形態】
【0022】
以下、本発明の具体例を実施例及び図面を用いて詳細に説明する。但し、以下に示す実施例は、本発明の技術的思想を具体化するための車両用ナビゲーション装置を例示するものであって、本発明をこの車両用ナビゲーション装置に特定することを意図するものではなく、特許請求の範囲に含まれるその他の実施例の車両用ナビゲーション装置にも等しく適応し得るものである。
【実施例】
【0023】
図1は、本発明の実施例にかかる車両用ナビゲーション装置が搭載された2台の車両A、Bによりグループ走行し、共通目的地Gに向かう際の経路R1〜R3の説明図である。
【0024】
車両Aは、経路R1及びR3を通過して共通目的地Gに至る。車両Bは、経路R2及びR3を通過して共通目的地Gに至る。この場合、経路R3は、車両A及びBの共通の経路である。また、経路R1及びR2は、交差点である合流地点Jにおいて合流する。なお、車両A、B間では、後述するように、共通目的地Gを特定する目的地情報、共通目的地Gまでの各車両A、Bの経路の情報、各車両A、Bの現在位置の情報の送受信が行われる。
【0025】
なお、各車両A、Bの経路については、共通目的地Gまでの経路を各車両に搭載されたナビゲーション装置にて探索してもよいし、何れか一方の車両に搭載されたナビゲーション装置で双方の車両A、Bの経路を探索し、探索した経路を他方のナビゲーション装置に送信するようにしてもよい。
【0026】
以下の実施例では、車両A、Bの各経路は、各車両に搭載されたナビゲーション装置で探索されるものとして説明を行う。
【0027】
図2は、車両Aに搭載された車両用ナビゲーション装置10の構成を示すブロック図である。なお、車両Bに搭載される車両用ナビゲーション装置も同様に構成される。また、図1に示した車両は2台であるが、本発明は2台の車両に限られるものではなく、任意の複数台であってもよい。
【0028】
制御手段11は、CPU12、ROM13、RAM14を有するマイクロプロセッサなどで構成され、ROM13に記録された制御プログラムに従って車両用ナビゲーション装置10の各部の動作を制御するものである。また、制御手段11は、表示手段21に対する表示画像の制御を行う表示制御手段として機能する。
【0029】
現在位置検出手段15は、所定の時間間隔で、地球上空を周回している複数のGPS衛星から時刻情報を含む電波(衛星信号)を受信して、車両Aの位置情報(GPS測位位置)を算出する。位置は緯度、経度で算出される。なお、車両Aの現在位置は、車両Aに搭載されている加速度センサ、ジャイロセンサなどの角速度センサからなる自律航法手段を用いて算出することもできる。また、GPS衛星から受信した電波に基づき算出した測位位置を自律航法手段を用いて補正して用いることもできる。
【0030】
経路探索手段16は、ユーザが入力手段20を用いて目的地を入力することにより、地図情報記憶手段17に記憶されている地図情報を参照し、現在位置検出手段15が検出した車両Aの現在位置から目的地、又は、ユーザが指定した所望の出発地から目的地に至る最適な経路を探索するものである。なお、経路の探索は、現在位置又は出発地に対応するノードから目的地に対応するノードに至るリンクと、ノードとをダイクストラ法等の各種の手法によって探索し、リンク長(リンクコスト)や所要時間等を累積し、総リンク長(移動距離)又は総所要時間等が最短となる経路を探索し、当該経路に属するノードやリンクを経路データとして提供するものである。
【0031】
地図情報記憶手段17は、道路の分岐地点である交差点等の結節点をノードとする道路ノードデータと、それぞれのノード間を結ぶ経路をリンクとした道路リンクデータと、地形図データとを含む地図情報を記憶している。
【0032】
道路ノードデータには、道路ノード番号、位置座標、接続リンク本数、分岐地点名称等が含まれる他、分岐地点から所定距離だけ離れた案内地点において、右左折、直進等の経路案内を行う経路案内データ及び案内地点の位置座標が記憶されている。
【0033】
道路リンクデータには、始点及び終点となる道路ノード番号、道路種別、ノード間の距離情報であるリンク長(リンクコスト)、所要時間、車線数、車道幅などが含まれる。道路リンクデータには、さらに、リンク属性として橋、トンネル、踏切、料金所、制限速度等のデータが付与される。道路種別とは、高速道路や有料道路の別、国道や都道府県道等の別を含む情報である。
【0034】
地形図データには、海岸線、湖沼、河川形状などの水系データ、行政境界データ、駐車場をはじめとする施設位置、施設形状、施設名称を含む施設データからなる背景データが含まれる。
【0035】
合流地点算出手段18は、図1に示すように、各車両A、Bの車両用ナビゲーション装置10で探索された現在位置又は出発地から共通目的地Gまでの各経路R1〜R3が合流する合流地点Jを算出するものである。各車両A、Bの現在位置又は出発地は、通常は異なっており、共通目的地Gに近づいたある地点において経路R1及びR2が合流して共通の経路R3となる。合流地点算出手段18は、共通の経路R3の開始地点として合流地点Jを算出する。なお、車両A、Bが全く異なる方向から共通目的地Gに移動する場合には、合流地点Jが共通目的地Gとなることも有り得る。
【0036】
通信手段19は、車両Bから、無線通信により車両Bの現在位置及び経路情報を含む車両情報(他車両情報)を受信するものである。また、通信手段19は、車両Bに対して、無線通信により共通目的地Gの情報を送信するとともに、車両Aの現在位置及び経路情報を含む車両情報を送信するものである。
【0037】
入力手段20は、車両用ナビゲーション装置10における操作入力や、経路を探索するための出発地、共通目的地Gの入力を行う各種キー、タッチパネル、リモートコントローラ等から構成される。
【0038】
表示手段21は、地図画像、経路R1〜R3、車両A、Bの現在位置、合流地点J、共通目的地G等をユーザに表示して視認できるようにするためのものであり、液晶ディスプレイなどで構成される。
【0039】
なお、制御手段11には、ナビゲーションに必要な音声ガイダンスを出力するスピーカ(図示せず)を接続することもできる。
【0040】
次に、図3に示すフローチャートに基づき、2台の車両A、Bでグループ走行し、共通目的地Gに向かう場合の詳細な処理について説明する。
【0041】
車両Aにおいて、ユーザが入力手段20を操作し、車両A及びBの共通目的地Gを設定するとともに、必要に応じて所望の出発地を設定する(ステップS101)。共通目的地Gが設定されると、制御手段11は、共通目的地Gにかかる情報を、通信手段19を介して車両Bに送信する(ステップS102)。
【0042】
経路探索手段22は、地図情報記憶手段17に記憶されている地図情報に基づき、現在位置検出手段15が検出した車両Aの現在位置、又は、ユーザが指定した出発地から共通目的地Gに至る最適な経路R1、R3を探索する(ステップS103)。
【0043】
すなわち、現在位置検出手段15は、GPS衛星から位置情報を含む電波を受信することにより、車両Aの現在位置を検出する。経路探索手段16は、検出した現在位置に基づき、地図情報記憶手段17から対応する地図情報を抽出し、地図情報を構成するノードデータ及びリンクデータに基づき、例えば、共通目的地Gまでの所要時間が最も短い経路、又は、目的地までの距離が最も短い全経路を最適な経路R1、R3として探索する。
【0044】
探索された車両Aの経路R1、R3は、車両用ナビゲーション装置10の表示手段21に、車両Aの現在位置及び地図情報とともに表示される(ステップS104)。
【0045】
同様にして、車両Aから共通目的地Gにかかる情報を受信した車両Bは、車両Bの現在位置又は指定した出発地から共通目的地Gまでの最適な経路R2、R3を探索し、その経路R2、R3を車両Bの現在位置及び地図情報とともに車両Bのナビゲーション装置の表示手段に表示する。
【0046】
次いで、車両A及びBのユーザは、車両Aの表示手段21及び車両Bの表示手段に表示された経路R1、R3及びR2、R3に従ってグループ走行を開始する(ステップS105)。この場合、車両Aの表示手段21には、車両Aの現在位置を中心とする経路R1、R3の必要な範囲を含む地図画像が表示され、車両Aの走行とともに、地図画像がスクロールされ、表示範囲が移動する。車両Bにおいても同様に、車両Bの走行とともに、現在位置を中心とする経路R2、R3の必要な範囲が表示される。
【0047】
グループ走行が開始されると、車両Aの制御手段11は、通信手段19を介して車両Bに車両情報を要求し、この要求に応じて車両Bから車両情報(他車両情報)を取得する(ステップS106)。車両Bの車両情報には、車両Bの現在位置と、車両Aと同様にして探索した共通目的地Gまでの経路R2、R3にかかる経路情報とが含まれる。なお、制御手段11は、車両Bに対して所定の時間間隔で車両情報を要求し、車両Bの最新の現在位置にかかる情報を含む車両情報を逐次取得する。同様に、車両Bは、車両Aに車両情報を要求し、この要求に応じて車両Aの現在位置及び経路R1、R3にかかる経路情報を逐次取得する。
【0048】
車両Aの合流地点算出手段18は、経路探索手段16により探索した車両Aの経路R1、R3と、通信手段19を介して取得した車両Bの経路R2、R3とに基づき、経路R3の開始地点である合流地点Jを算出する(ステップS107)。この場合、車両A及びBの目的地Gが共通であるため、共通目的地Gと合流地点Jとの間の経路R3は、車両A及びBの共通の経路となる。なお、合流地点Jは、通常は交差点である。車両Bにおいても同様に、合流地点Jが算出されてもよいし、車両Aから車両Bに対して算出した合流地点Jの情報を送信する構成でも構わない。
【0049】
合流地点Jが算出された後、制御手段11は、車両Bの最新の現在位置にかかる情報を逐次取得し、その情報に基づき、車両Bが合流地点Jに到達したか否かを判定する(ステップS108)。車両Bが合流地点Jに到達したものと判定すると(ステップS108、YES)、制御手段11は、表示手段21を制御し、現在、表示手段21に表示されている車両Aの現在位置及び所定範囲の経路R1、R3に代えて、車両Aの現在位置と取得した車両Bの現在位置及び合流地点Jを含む範囲を経路R3を表示させる(ステップS109、図4参照)。車両Bにおいても同様に、車両Aが合流地点Jに到達したものと判定されると、車両Bの現在位置と車両Aの現在位置及び合流地点Jを含む範囲の経路R3を表示させる。
【0050】
車両Aの制御手段11は、車両A、B及び合流地点Jが表示手段21に同時に表示できるように、表示の縮尺を調整する。この場合、車両Bが合流地点Jに到達した後、車両A、B及び合流地点Jを含む必要な範囲のみの地図画像を表示手段21に表示するため、地図の縮尺が必要以上に大きくなることがなく、良好な常態で各車両A及びBの位置を確認することができる。車両Bにおいても同様である。
【0051】
ここで、図4に示すように、車両Aが先に合流地点Jを通過して経路R3に進入した後、車両Bが合流地点Jに到達した場合には、車両Aのユーザは、表示手段21に表示されている合流地点Jの位置(自分が少し前に通過した合流地点Jの位置)と、既に走行している共通の経路R3上を走行する車両Bの位置とから、車両Aと車両Bとの位置関係を容易に推測することができる。このことは、一般に運転者は自車両が合流地点Jを通過してからの経過時間や走行距離は感覚的に把握しており、後から合流地点Jに他の車両が到達したしたことがわかれば、当該他の車両と自車両との間の距離も直感的に認識できるという知見に基づいている。合流地点Jは、交差点のような目印となる地点であるため、記憶に残り易く、その分、位置関係の把握も容易となる。車両Bにおいても同様である。
【0052】
また、車両Bが車両Aよりも先行して合流地点Jに到達した場合、車両Aのユーザは、合流地点Jに到達した後、共通の経路R3上を先行して走行している車両Bとの位置関係を容易に推測することができる。車両Bにおいても同様である。
【0053】
なお、表示手段21には、合流地点J、車両A及びBの現在位置に加えて、共通目的地Gを同時に表示させることにより、各車両A及びBの位置関係を一層具体的に把握することができる。
【0054】
また、車両A及びBが合流地点Jに到達した後、車両A及びBの現在位置間の距離を表示手段21に表示させることにより、車両A及びBの位置関係を具体的なデータに基づいてさらに正確に把握することができる。さらにまた、前記距離を走行するのに要する走行推定時間を算出して表示手段21に表示させることにより、例えば、先行する車両Aに対して後続の車両Bがどの程度遅れているのか、という状況を把握することができる。
【0055】
なお、上記実施例では、2台の車両A及びBによりグループ走行する場合について説明したが、前述のように3台以上の車両でグループ走行する場合にも容易に拡張して適用することができる。また、車両A及びBは、必ずしも共通目的地Gまでの経路探索を行う必要はなく、例えば、先行する車両Aの走行経路の履歴を記憶させておき、後続する車両Bが車両Aの走行経路に進入した地点を合流地点として、表示手段21に車両Bを表示させるようにすることもできる。
【符号の説明】
【0056】
10・・・車両用ナビゲーション装置
11・・・制御手段
15・・・現在位置検出手段
16・・・経路探索手段
17・・・地図情報記憶手段
18・・・合流地点算出手段
19・・・通信手段
20・・・入力手段
21・・・表示手段
G・・・目的地
J・・・合流地点
R1〜R3・・・経路
【特許請求の範囲】
【請求項1】
地図情報を記憶する地図情報記憶手段と、自車両の現在位置を検出する現在位置検出手段と、前記自車両の前記現在位置を、前記現在位置に対応する前記地図情報とともに表示する表示手段とを備える車両用ナビゲーション装置において、
前記自車両と共通の目的地まで移動する他車両の現在位置を含む他車両情報を取得する他車両情報取得手段と、
取得した前記他車両情報に基づき前記自車両と前記他車両とが合流する合流地点を算出する合流地点算出手段と、
前記合流地点に到達後の前記他車両の前記現在位置を、前記自車両の前記現在位置とともに前記表示手段に表示させる制御を行う表示制御手段と、
を備えることを特徴とする車両用ナビゲーション装置。
【請求項2】
前記表示制御手段は、前記合流地点及び/又は前記目的地を、前記自車両及び前記他車両の前記各現在位置とともに前記表示手段に表示させる制御を行うことを特徴とする請求項1に記載の車両用ナビゲーション装置。
【請求項3】
前記表示制御手段は、前記自車両の現在位置と前記他車両の現在位置との間の距離、及び/又は、前記自車両の現在位置と前記他車両の現在位置との間を走行するのに要する走行推定時間を前記表示手段に表示させる制御を行うことを特徴とする請求項1又は2に記載の車両用ナビゲーション装置。
【請求項4】
前記目的地までの前記自車両の経路を探索する経路探索手段を備え、
取得する前記他車両情報には、他車両において探索された他車両の経路情報を含み、
前記合流地点算出手段は、探索された前記自車両の前記経路と、取得した前記他車両情報に基づき前記合流地点を算出することを特徴とする請求項1〜3のいずれか1項に記載の車両用ナビゲーション装置。
【請求項1】
地図情報を記憶する地図情報記憶手段と、自車両の現在位置を検出する現在位置検出手段と、前記自車両の前記現在位置を、前記現在位置に対応する前記地図情報とともに表示する表示手段とを備える車両用ナビゲーション装置において、
前記自車両と共通の目的地まで移動する他車両の現在位置を含む他車両情報を取得する他車両情報取得手段と、
取得した前記他車両情報に基づき前記自車両と前記他車両とが合流する合流地点を算出する合流地点算出手段と、
前記合流地点に到達後の前記他車両の前記現在位置を、前記自車両の前記現在位置とともに前記表示手段に表示させる制御を行う表示制御手段と、
を備えることを特徴とする車両用ナビゲーション装置。
【請求項2】
前記表示制御手段は、前記合流地点及び/又は前記目的地を、前記自車両及び前記他車両の前記各現在位置とともに前記表示手段に表示させる制御を行うことを特徴とする請求項1に記載の車両用ナビゲーション装置。
【請求項3】
前記表示制御手段は、前記自車両の現在位置と前記他車両の現在位置との間の距離、及び/又は、前記自車両の現在位置と前記他車両の現在位置との間を走行するのに要する走行推定時間を前記表示手段に表示させる制御を行うことを特徴とする請求項1又は2に記載の車両用ナビゲーション装置。
【請求項4】
前記目的地までの前記自車両の経路を探索する経路探索手段を備え、
取得する前記他車両情報には、他車両において探索された他車両の経路情報を含み、
前記合流地点算出手段は、探索された前記自車両の前記経路と、取得した前記他車両情報に基づき前記合流地点を算出することを特徴とする請求項1〜3のいずれか1項に記載の車両用ナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−112889(P2012−112889A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−263905(P2010−263905)
【出願日】平成22年11月26日(2010.11.26)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月26日(2010.11.26)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
[ Back to top ]