
車両用ブレーキ圧制御装置
【課題】旋回時において旋回外輪の制動力を効率よく発揮することができる車両用ブレーキ圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ圧制御装置は、左右輪の許容差圧を設定する許容差圧設定手段と、許容差圧設定手段で設定した前記許容差圧と左右輪のうちの低摩擦側の車輪に加わる低摩擦側ブレーキ圧とを足し合わせた値を高摩擦側の車輪に加わる高摩擦側ブレーキ圧の目標制御圧として設定する目標制御圧設定手段と、高摩擦側ブレーキ圧を目標制御圧に基づいて制御する高摩擦側ブレーキ圧制御手段を備える。許容差圧設定手段は、車体速度(第1マップM1)に基づいて左右後輪の許容差圧を求めるように構成され、車体速度から求めた左右後輪の許容差圧は常に0よりも大きな値になっている。
【解決手段】車両用ブレーキ圧制御装置は、左右輪の許容差圧を設定する許容差圧設定手段と、許容差圧設定手段で設定した前記許容差圧と左右輪のうちの低摩擦側の車輪に加わる低摩擦側ブレーキ圧とを足し合わせた値を高摩擦側の車輪に加わる高摩擦側ブレーキ圧の目標制御圧として設定する目標制御圧設定手段と、高摩擦側ブレーキ圧を目標制御圧に基づいて制御する高摩擦側ブレーキ圧制御手段を備える。許容差圧設定手段は、車体速度(第1マップM1)に基づいて左右後輪の許容差圧を求めるように構成され、車体速度から求めた左右後輪の許容差圧は常に0よりも大きな値になっている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、スプリット路面(摩擦係数が部分的に異なる路面)走行時や旋回時等において左右輪の差圧(左右輪にかかるブレーキ圧の差)を制御する車両用ブレーキ圧制御装置に関する。
【背景技術】
【0002】
近年、一般的な車両用ブレーキ圧制御装置は、低μ路(低摩擦路)で車輪がロックするのを防止するアンチロックブレーキ制御機能を有しているが、各車輪のスリップ率に基づいて各車輪に加わるブレーキ圧が制御されるので、例えばスプリット路面などにおいては左右輪の差圧が大きくなりすぎてしまう場合がある。
【0003】
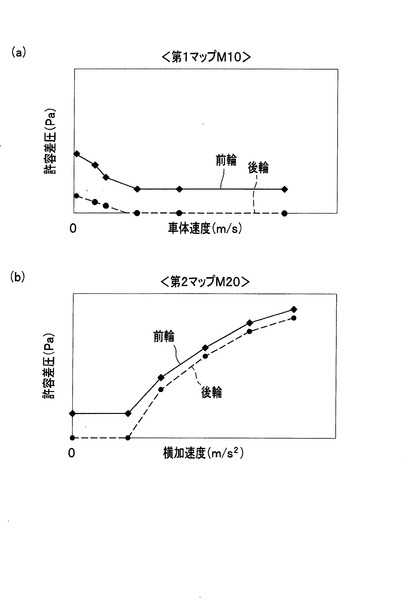
これを対策する技術としては、従来、車体速度などに基づいて許容差圧を決定する許容差圧設定手段を有し、決定した許容差圧と、左右輪のうちの低摩擦側の車輪に加わる低摩擦側ブレーキ圧とを足し合わせた値を、目標制御圧として高摩擦側の車輪に加わる高摩擦側ブレーキ圧を制御するものが知られている(特許文献1参照)。具体的に、許容差圧設定手段は、図15(a)に示す車体速度に対応した許容差圧が設定されている第1マップM10と、図15(b)に示す横加速度に対応した許容差圧が設定されている第2マップM20とを主に備えている。なお、従来技術では、許容差圧設定手段が3つのマップを参照するようになっているが、説明を簡単にするため、2つのマップで説明を行うこととする。
【0004】
第1マップM10は、車体速度が所定値以上で左右後輪の許容差圧が0になるように設定されている。また、第2マップM20は、横加速度が所定値以上で左右後輪の許容差圧が0から徐々に大きくなるように設定されている。そして、許容差圧設定手段では、車体速度や横加速度に基づいて各マップM10,M20からそれぞれ許容差圧を求め、これらの許容差圧のうち最大のものを制御に用いる許容差圧として決定している。
【0005】
この技術によれば、車体速度や横加速度などの車両の状態に応じて決められた許容差圧に、低摩擦側ブレーキ圧と高摩擦側ブレーキ圧との差圧を保つことができ、左右輪の差圧が大きくなりすぎることが防止されている。また、横加速度が発生する旋回時には、第2マップM20が参照されて、左右後輪の差圧がある程度大きな値の許容差圧に保たれるので、内輪よりも外輪のブレーキ圧を大きくして、旋回外輪の制動力を十分に発揮することが可能となっている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−55583号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、上記従来技術において横加速度を横加速度センサを用いずに車輪速度から推定して算出しようとする場合、アンチロックブレーキ制御が行われている状態においては車輪速度が大きく変化することから横加速度を正確に推定することが難しくなる。
【0008】
このような場合には、旋回時であっても第2マップM20ではなく第1マップM10を用いることが望まれる。また、横加速度センサが故障した場合も同様に、旋回時であっても第1マップM10を用いることが望まれる。
【0009】
しかしながら、従来技術では、第1マップM10において車体速度が所定値以上で左右後輪の許容差圧が0になるように設定していたので、第1マップM10が選択された旋回時においては左右後輪の差圧が0となり、旋回外輪の制動力を効率よく発揮させることが難しかった。
【0010】
そこで、本発明では、横加速度を制御に用いることが困難な場合であっても旋回時において旋回外輪の制動力を効率よく発揮することができる車両用ブレーキ圧制御装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
前記課題を解決する本発明は、車両の運動状態を示すパラメータに基づいて同一車軸上の左右輪の許容差圧を設定する許容差圧設定手段と、前記許容差圧設定手段で設定した前記許容差圧と左右輪のうちの低摩擦側の車輪に加わる低摩擦側ブレーキ圧とを足し合わせた値を高摩擦側の車輪に加わる高摩擦側ブレーキ圧の目標制御圧として設定する目標制御圧設定手段と、前記高摩擦側ブレーキ圧を前記目標制御圧に基づいて制御する高摩擦側ブレーキ圧制御手段と、を備えた車両用ブレーキ圧制御装置であって、前記許容差圧設定手段は、車体速度に基づいて左右後輪の許容差圧を求めるように構成され、車体速度から求めた左右後輪の許容差圧が常に0よりも大きな値になるように構成されていることを特徴とする。
【0012】
ここで、「許容差圧」とは、左側の車輪に加わるブレーキ圧と右側の車輪に加わるブレーキ圧との差が路面状況(車両の運動状態)等に応じて、どの程度まで大きくなってよいかを示す指標の圧力をいう。また、「車両の運動状態を示すパラメータ」とは、車体速度、横加速度、ブレーキ圧などのパラメータをいう。
【0013】
本発明によれば、車体速度から求めた左右後輪の許容差圧が常に0よりも大きな値となるので、例えば従来のように横加速度の推定が困難な場合や横加速度センサが故障した場合(すなわち旋回時において横加速度を使わずに車体速度から許容差圧を決めたい場合)であって、横加速度を制御に用いることが困難な場合(車両の運動状態を示すパラメータとして用いることが困難な場合)であっても、旋回時に左右後輪に差圧を持たせることができる。これにより、旋回外輪の制動力を効率よく発揮させることができる。
【0014】
また、本発明は、車輪のロックを防止するアンチロックブレーキ制御を実行するアンチロックブレーキ制御手段と、横加速度を左右の車輪速度差から推定する横加速度推定手段と、をさらに備え、前記許容差圧設定手段は、推定した横加速度に基づいて左右後輪の許容差圧を求めるように構成され、前記車体速度から求めた許容差圧を第1候補とするとともに、前記横加速度から求めた許容差圧を第2候補とし、少なくとも前記第1候補および前記第2候補を含む複数の候補のうち最大のものを前記目標制御圧設定手段で用いる許容差圧として決定し、前記横加速度推定手段は、前記アンチロックブレーキ制御が実行されている場合には、推定した横加速度が前回値よりも増大するのを禁止するように構成され、前記第1候補の許容差圧が、横加速度が0から所定値までの間において求められる第2候補の許容差圧よりも大きな値に設定されていてもよい。
【0015】
これによれば、アンチロックブレーキ制御が実行されている場合には、推定した横加速度が前回値よりも増大するのが禁止されるので、例えば、直進時にアンチロックブレーキ制御が開始された後、車体が旋回する場合には、横加速度が0付近(0から所定値までの間)の値でそれ以上増大することがない。そこで、0付近の横加速度から求められる第2候補の許容差圧よりも、第1候補の許容差圧を大きな値に設定することで、この際の許容差圧は、第1候補の許容差圧に設定される。したがって、アンチロックブレーキ制御が実行されて横加速度の推定が困難な場合であっても、少なくとも0よりも大きく、第2候補の許容差圧よりも大きな第1候補の許容差圧の値に左右後輪の差圧が許容されるので、旋回外輪の制動力を効率よく発揮させることができる。
【0016】
また、アンチロックブレーキ制御が実行されていない場合には、正確に横加速度が推定されるので、正確な横加速度から求められる第2候補の許容差圧を含めた複数の候補の中から最適な許容差圧を決めて、旋回などに適した良好な制御を行うことができる。
【0017】
また、本発明では、前記許容差圧設定手段が、前記アンチロックブレーキ制御を開始する際の車輪速度から現在の車輪速度までの速度変化量が所定値を越えるまでは、左右後輪の許容差圧を0に保つように構成されていてもよい。
【0018】
ここで、「アンチロックブレーキ制御を開始する際の車輪速度」とは、アンチロックブレーキ制御の開始時点での車輪速度を意味する他、アンチロックブレーキ制御の開始時点よりも少し前の車輪速度をも含む。
【0019】
これによれば、制動初期(アンチロックブレーキ制御開始時)において、左右後輪の許容差圧を0にすることができるので、スプリット路での車両の安定性を向上させることができる。
【発明の効果】
【0020】
本発明によれば、車体速度から求めた左右後輪の許容差圧が常に0よりも大きな値となるので、横加速度を制御に用いることが困難な場合であっても旋回時において旋回外輪の制動力を効率よく発揮することができる。
【図面の簡単な説明】
【0021】
【図1】本実施形態に係る車両用ブレーキ圧制御装置を搭載した車両を示す構成図である。
【図2】車両用ブレーキ圧制御装置の液圧ユニットの詳細を示す構成図である。
【図3】制御装置の構成を示すブロック図である。
【図4】車体速度と許容差圧との関係を示す第1マップ(a)と、横加速度と許容差圧との関係を示す第2マップ(b)と、低摩擦側ブレーキ圧と許容差圧との関係を示す第3マップ(c)である。
【図5】制御装置の機能を示すフローチャートである。
【図6】高摩擦側ブレーキ圧制御手段の機能を示すフローチャートである。
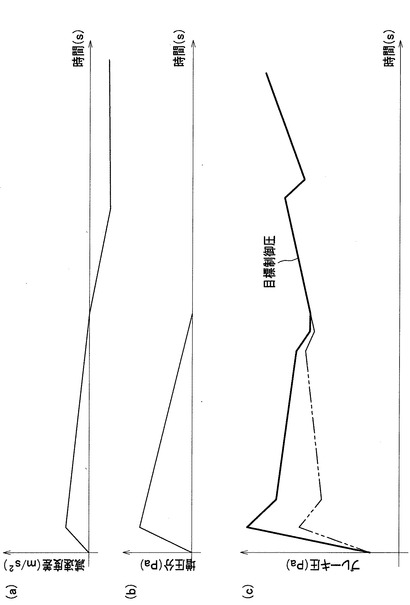
【図7】許容差圧の経時変化の一例を示すグラフ(a)と、低摩擦側ブレーキ圧と目標制御圧の経時変化の一例を示すグラフ(b)である。
【図8】高摩擦側ブレーキ圧の制御方法を示すグラフである。
【図9】車輪速度の経時変化の一例を示すグラフ(a)と、目標減速度と実減速度の経時変化の一例を示すグラフ(b)と、減速度差の経時変化の一例を示すグラフ(c)である。
【図10】減速度差の経時変化の一例を示すグラフ(a)と、減速度差に基づいて算出された増圧分の経時変化の一例を示すグラフ(b)と、増圧分が加算された目標制御圧の経時変化の一例を示すグラフ(c)である。
【図11】他の実施形態に係る制御装置の構成を示すブロック図である。
【図12】図11の制御装置の動作を示すフローチャートである。
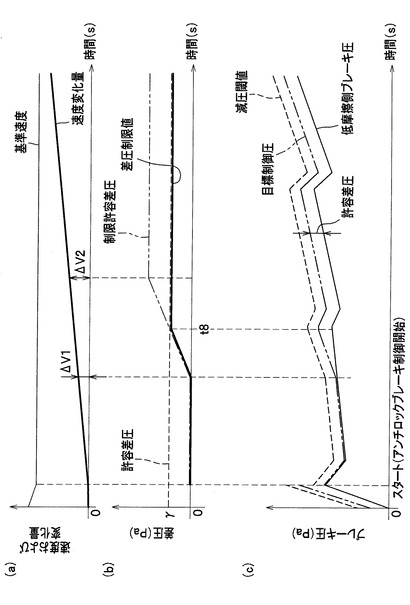
【図13】基準速度および速度変化量の経時変化の一例を示すグラフ(a)と、許容差圧と制限許容差圧の経時変化の一例を示すグラフ(b)と、低摩擦側ブレーキ圧と目標制御圧の経時変化の一例を示すグラフ(c)である。
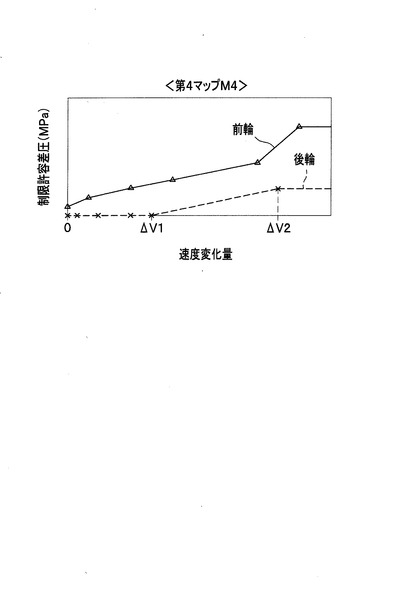
【図14】速度変化量と許容差圧との関係を示す第4マップである。
【図15】従来技術における、車体速度と許容差圧との関係を示す第1マップ(a)と、横加速度と許容差圧との関係を示す第2マップ(b)である。
【発明を実施するための形態】
【0022】
次に、本発明の実施形態について、適宜図面を参照しながら詳細に説明する。
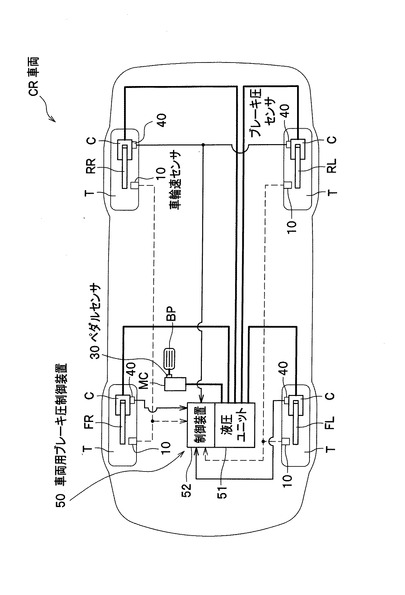
図1に示すように、車両CRには、車輪速センサ10、ペダルセンサ30およびブレーキ圧センサ40が設けられるとともに、これらのセンサ10,30,40で検出した信号に基づいてブレーキ圧(詳しくは、ブレーキ液圧)を制御する車両用ブレーキ圧制御装置50が設けられている。
【0023】
車輪速センサ10は、各車輪Tの車輪速度を検出するセンサであり、各車輪Tのそれぞれに1つずつ設けられている。そして、各車輪速センサ10は、車両用ブレーキ圧制御装置50に接続されており、これにより車両用ブレーキ圧制御装置50が4つの車輪Tの全ての車輪速度を取得することが可能となっている。なお、前記した4つの車輪速センサ10は、それぞれ固有のIDを持っており、これにより車両用ブレーキ圧制御装置50において各車輪速センサ10から送られてくる各信号が、どの車輪Tの速度であるのかを認識することができるようになっている。
【0024】
ペダルセンサ30は、ブレーキペダル(ブレーキ操作子)BPからマスタシリンダMCに入力されるブレーキ踏力に応じたブレーキ圧を、ブレーキペダルBPの踏み込み量(操作量)として検出するセンサである。そして、このペダルセンサ30は、車両用ブレーキ圧制御装置50に接続されており、これにより車両用ブレーキ圧制御装置50がブレーキペダルBPの踏み込み量を取得することが可能となっている。
【0025】
ブレーキ圧センサ40は、各車輪Tに設けられた各キャリパC内のブレーキ圧を検出するセンサであり、各キャリパCのそれぞれに1つずつ設けられている。そして、各ブレーキ圧センサ40は、車両用ブレーキ圧制御装置50に接続されており、これにより車両用ブレーキ圧制御装置50が4つの車輪Tに加わる全てのブレーキ圧を取得することが可能となっている。なお、前記した4つのブレーキ圧センサ40は、それぞれ固有のIDを持っており、これにより車両用ブレーキ圧制御装置50において各ブレーキ圧センサ40から送られてくる各信号が、どの車輪Tに加わるブレーキ圧であるのかを認識することができるようになっている。
【0026】
車両用ブレーキ圧制御装置50は、車両CRの各車輪Tに付与する制動力(ブレーキ圧)を適宜制御するためのものであり、油路や各種部品が設けられた液圧ユニット51と、液圧ユニット51内の各種部品を適宜制御するための制御装置52とを主に備えている。
なお、液圧ユニット51から出力されるブレーキ圧は、配管を介して各車輪Tに設けられたキャリパCに供給されるようになっており、各キャリパCにブレーキ圧が付与されることで、各車輪Tに車輪ブレーキFL,RL,FR,RRの制動力が働くようになっている。
【0027】
以下に、車両用ブレーキ圧制御装置50の液圧ユニット51の構成について図2を参照して説明する。
【0028】
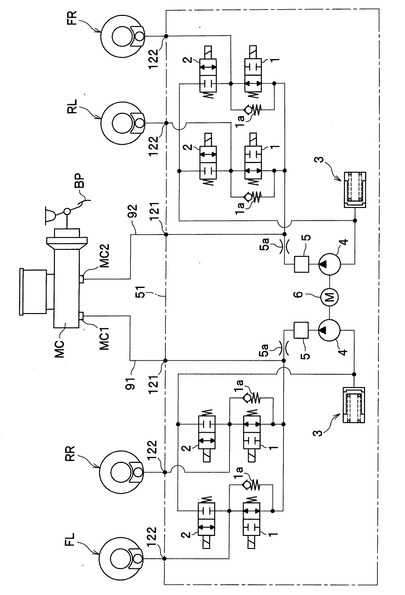
液圧ユニット51は、運転者がブレーキペダルBPに加える踏力に応じたブレーキ圧を発生するマスタシリンダMCと、車輪ブレーキFL,RR,RL,FRとの間に配置されている。マスタシリンダMCの二つの出力ポートMC1,MC2は、液圧ユニット51の入口ポート121に接続され、液圧ユニット51の出口ポート122が、各車輪ブレーキFL,RR,RL,FRに接続されている。そして、通常時は液圧ユニット51の入口ポート121から出口ポート122までが連通した油路となっていることで、ブレーキペダルBPの踏力が各車輪ブレーキFL,RR,RL,FRに伝達されるようになっている。
【0029】
液圧ユニット51には、各車輪ブレーキFL,RR,RL,FRに対応して四つの入口弁1、四つの出口弁2、および四つのチェック弁1aが設けられる。また、出力ポートMC1,MC2に対応した各出力液圧路91,92に対応して二つのリザーバ3、二つのポンプ4、二つのダンパ5、および二つのオリフィス5aが設けられ、二つのポンプ4を駆動するための電動モータ6を備えている。
【0030】
入口弁1は、各車輪ブレーキFL,RR,RL,FRとマスタシリンダMCとの間に配置された常開型の電磁弁である。入口弁1は、通常時に開いていることで、マスタシリンダMCから各車輪ブレーキFL,RR,RL,FRへブレーキ圧が伝達するのを許容している。また、入口弁1は、車輪がロックしそうになったときに制御装置52(図1参照)によってアンチロックブレーキ制御が実行されることで閉塞され、これによりブレーキペダルBPから各車輪ブレーキFL,RR,RL,FR側に伝達する液圧が遮断される。また、アンチロックブレーキ制御中においては、制御装置52によって入口弁1が適宜開放されることで、再びブレーキ踏力に基づくブレーキ圧が各車輪ブレーキFL,RR,RL,FR側に伝達され、各ブレーキ圧が増圧されるようになっている。
【0031】
出口弁2は、各車輪ブレーキFL,RR,RL,FRと各リザーバ3との間に配置された常閉型の電磁弁である。出口弁2は、通常時に閉塞されているが、車輪がロックしそうになったときに制御装置52により開放されることで、各車輪ブレーキFL,RR,RL,FRの各キャリパC内に加わるブレーキ圧が各リザーバ3に逃がされ、各ブレーキ圧が減圧されるようになっている。また、この出口弁2と前記した入口弁1が、アンチロックブレーキ制御中において、ともに閉塞されることで、各ブレーキ圧が保持されるようになっている。
【0032】
チェック弁1aは、各入口弁1に並列に接続されている。このチェック弁1aは、各車輪ブレーキFL,RR,RL,FR側からマスタシリンダMC側へのブレーキ液の流入のみを許容する弁であり、ブレーキペダルBPからの入力が解除された場合に入口弁1を閉じた状態にしたときにおいても、各車輪ブレーキFL,RR,RL,FR側からマスタシリンダMC側へのブレーキ液の流入を許容する。
【0033】
リザーバ3は、各出口弁2が開放されることによって逃がされるブレーキ圧を吸収する機能を有している。
ポンプ4は、リザーバ3で吸収されているブレーキ液を吸入し、そのブレーキ液をダンパ5やオリフィス5aを介してマスタシリンダMCへ戻す機能を有している。これにより、リザーバ3によるブレーキ圧の吸収によって減圧された各出力液圧路91,92の圧力状態が回復される。
【0034】
図1に示すように、制御装置52は、例えば、CPU、RAM、ROMおよび入出力回路を備えており、前記した各センサ10,30,40の信号と、ROMに記憶されたプログラムやデータに基づいて各種演算処理を行うことによって、アンチロックブレーキ制御や、このアンチロックブレーキ制御中における左右の車輪T(以下、「左右輪T,T」ともいう。)のキャリパCに加わるブレーキ圧の差圧制御を実行する。
【0035】
以下に、制御装置52の機能のうち、前記した差圧制御を実行するための機能について図3〜図5を参照して詳細に説明する。
【0036】
図3に示すように、制御装置52は、許容差圧設定手段52A、目標制御圧設定手段52B、実減速度算出手段52C、目標減速度設定手段52D、高摩擦側ブレーキ圧制御手段52E、アンチロックブレーキ制御手段52Fおよび横加速度推定手段52Gを備えている。
【0037】
アンチロックブレーキ制御手段52Fは、各車輪Tのロックを防止する公知のアンチロックブレーキ制御を実行する機能を有している。具体的に、アンチロックブレーキ制御手段52Fは、各車輪速センサ10から送られてくる車輪速度に基づいてスリップ率を算出し、このスリップ率に応じて前述した入口弁1や出口弁2を制御している。そして、アンチロックブレーキ制御手段52Fは、アンチロックブレーキ制御(ブレーキ圧の減圧制御)を開始した際には、開始したことを示す開始信号を横加速度推定手段52Gに出力するように構成されている。
【0038】
横加速度推定手段52Gは、横加速度を左右の車輪速度差から公知の方法により推定する機能を有しており、アンチロックブレーキ制御が実行されている場合(横加速度を正確に推定できない場合)には、推定する横加速度が前回値よりも増大するのを禁止するように構成されている。具体的に、横加速度推定手段52Gは、アンチロックブレーキ制御手段52Fから開始信号を受信した際には、直前に推定した横加速度の値(前回値)を保持もしくは徐々に減算していくような処理を行っている。そして、横加速度推定手段52Gは、推定した横加速度を許容差圧設定手段52Aに出力するように構成されている。
【0039】
なお、横加速度の推定方法としては、例えば、特開2007−30748号公報に開示されている方法などを採用すればよい。
【0040】
許容差圧設定手段52Aは、車両の運動状態を示すパラメータに基づいて、同一車軸上の左右輪T,Tの許容差圧を設定する機能を有している。具体的に、許容差圧設定手段52Aは、候補算出手段A1、許容差圧選択手段A2および記憶手段A3を備えており、これらによって前側の左右輪T,Tの許容差圧および後側の左右輪T,Tの許容差圧を設定するように構成されている。なお、許容差圧の設定方法や、その後の制御方法は、前側の左右輪T,Tと後側の左右輪T,Tとで変わることはないので、以下の説明では、主に後側の左右輪T,Tを対象として説明することとする。
【0041】
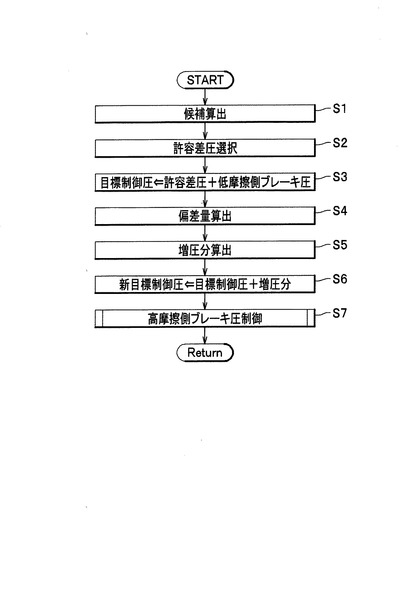
候補算出手段A1は、記憶手段A3から図4(a)〜(c)に示す第1マップM1、第2マップM2および第3マップM3を取得する機能と、このように取得した各マップM1,M2,M3から許容差圧の第1候補、第2候補および第3候補を算出する機能(図5;ステップS1)とを主に有している。具体的に、候補算出手段A1は、各車輪速センサ10で検出した車輪速度に基づいて車体速度を算出し、この車体速度と第1マップM1(車体速度用マップ)に基づいて許容差圧の第1候補を算出する機能を有している。また、候補算出手段A1は、横加速度推定手段52Gから送られてくる横加速度と第2マップM2(横加速度用マップ)に基づいて許容差圧の第2候補を算出する機能を有している。さらに、候補算出手段A1は、各ブレーキ圧センサ40で検出した各ブレーキ圧のうち後側の左右輪(同軸輪)T,Tに対応した2つのブレーキ圧の中から低μ路側のブレーキ圧(以下、「低摩擦側ブレーキ圧」という。)を選択し、このように選択した低摩擦側ブレーキ圧と第3マップM3(ブレーキ圧用マップ)に基づいて許容差圧の第3候補を算出する機能を有している。
【0042】
ここで、低摩擦側ブレーキ圧を選択する方法としては、例えば、アンチロックブレーキ制御が先に開始された方の車輪Tのブレーキ圧を低摩擦側ブレーキ圧として選択する方法が挙げられる。また、車体速度は、車輪速度から算出せずに、例えば前後加速度センサで検出する車体の加速度に基づいて算出してもよい。
【0043】
そして、候補算出手段A1は、前記したように算出した許容差圧の各候補を許容差圧選択手段A2に出力するように構成されている。なお、候補算出手段A1で選択した低摩擦側ブレーキ圧は、許容差圧選択手段A2を介して目標制御圧設定手段52B(詳しくは、後記する加算手段B1)に出力されるとともに、低摩擦側ブレーキ圧の逆側のブレーキ圧(高摩擦側ブレーキ圧)は、許容差圧選択手段A2および加算手段B1を介して高摩擦側ブレーキ圧制御手段52Eに出力されるようになっている。
【0044】
許容差圧選択手段A2は、候補算出手段A1から送られてくる許容差圧の各候補のうちの最大のものを許容差圧として選択して設定する機能(図5;ステップS2)を有している。そして、許容差圧選択手段A2は、選択した許容差圧を目標制御圧設定手段52Bに出力するように構成されている。
【0045】
記憶手段A3は、前記したマップM1,M2,M3を記憶している。
【0046】
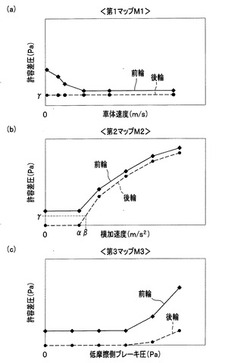
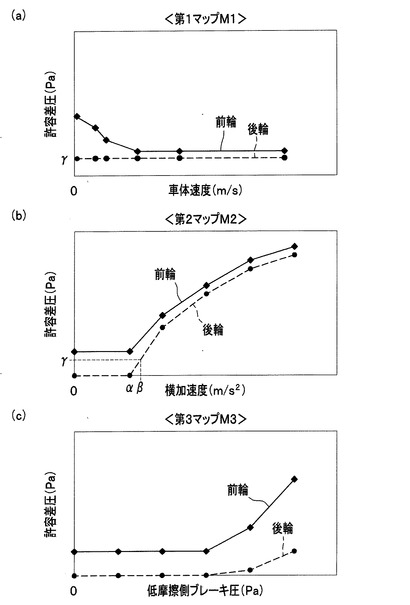
第1マップM1は、車体速度と許容差圧との関係を示すマップであり、この第1マップM1において、左右後輪の許容差圧は、すべての車体速度に対して0よりも大きな値γに設定されている。これにより、第1マップM1と車体速度から求めた左右後輪の許容差圧が常に0よりも大きな値γになっている。なお、本実施形態では、左右後輪の許容差圧が、車体速度に関わらず一定の値γに設定されているものとするが、値γは一定の値に限らず車体速度に応じて変化していてもよい。また、左右前輪の許容差圧は、車体速度がゼロであるときに最も高い許容差圧となり、そこから許容差圧は車体速度が上がるにつれて徐々に下がっていき、車体速度が所定値以上となると左右後輪の許容差圧よりも僅かに高い値に収束するように設定されている。
【0047】
第2マップM2は、横加速度と許容差圧との関係を示すマップであり、この第2マップM2では、横加速度が所定値以上となると、そこから徐々に許容差圧が上がっていくように設定されている。このように設定したのは、車両CRの旋回走行中においては、外輪に車重が大きくかかるため、外輪のブレーキ圧を上げると良好に制動力を得ることができるという理由からである。特に、左右後輪の許容差圧については、横加速度が0から所定値αまでの間で0(第1マップM1における左右後輪の許容差圧「γ(γが変化する場合にはγの最小値)」よりも小さい値)になり、所定値αを超えた後で徐々に大きくなるように設定されている。また、所定値αよりも大きな所定値βを越えた後は、第2マップM2の許容差圧は、第1マップM1の許容差圧「γ」よりも大きくなるように設定されている。これにより、横加速度が正確に算出されるときには、第2マップM2を用いて大きな差圧を左右後輪に発生させることが可能となっている。なお、第1マップM1の許容差圧「γ」が車体速度に応じて変化する構成とした場合には、第2マップM2において横加速度の所定値βは第1マップM1の許容差圧「γ」に応じて変動する値となる。
【0048】
第3マップM3は、低摩擦側ブレーキ圧と許容差圧との関係を示すマップであり、この第3マップM3では、低摩擦側ブレーキ圧が所定値以上となると、そこから徐々に許容差圧が上がっていくように設定されている。このように設定したのは、低摩擦側ブレーキ圧が高ければ、同一左右輪で路面係数が異なるスプリット路面とはならないと考えられるため、許容差圧を高めても問題ないばかりでなく、良好な制動力を得られるといった理由からである。なお、これらのマップM1,M2,M3は、実験やシミュレーションなどの結果に基づいて、前輪側および後輪側のそれぞれについて予め作成されている。
【0049】
また、マップM1,M2,M3において、前輪の許容差圧は、後輪の許容差圧よりも全体的に高くなっている。
【0050】
目標制御圧設定手段52Bは、加算手段B1、増圧分算出手段B2および偏差量算出手段B3を備えており、これらによって高μ路側のブレーキ圧(以下、「高摩擦側ブレーキ圧」という。)の目標値である目標制御圧を設定するように構成されている。なお、増圧分算出手段B2および偏差量算出手段B3の説明については、便宜上、後記する実減速度算出手段52Cおよび目標減速度設定手段52Dの説明の後に行うこととする。
【0051】
加算手段B1は、後で詳述する増圧分算出手段B2から信号が出力されてこないときには、許容差圧選択手段A2から出力されてくる2つの信号(許容差圧と低摩擦側ブレーキ圧)を足し合わせ、その値を目標制御圧として設定する機能を有している(図5;ステップS3)。また、この加算手段B1は、増圧分算出手段B2から信号が出力されてきた場合には、その信号(増圧分)を、前記した目標制御圧に足し合わせることで目標制御圧を上昇させ、その値を新目標制御圧として設定する機能も有している(図5;ステップS6)。そして、加算手段B1は、前記したように設定した目標制御圧または新目標制御圧を、高摩擦側ブレーキ圧制御手段52Eに出力するように構成されている。
【0052】
実減速度算出手段52Cは、左右輪T,Tの車輪速センサ10,10で検出した車輪速度のうち高摩擦側の車輪速度を選択し、この車輪速度に基づいて高摩擦側の実減速度(実際の減速度)を算出する機能を有している。そして、実減速度算出手段52Cは、算出した実減速度を目標制御圧設定手段52Bの偏差量算出手段B3に出力するように構成されている。
【0053】
目標減速度設定手段52Dは、ペダルセンサ30で検出したブレーキ圧(ブレーキペダルBPの踏み込み量に関連した情報)に基づいて、高摩擦側の車輪Tの目標減速度(ブレーキペダルBPの踏み込み量から安全率を見込んで最低限達成されるはずの減速度)を設定する機能を有している。そして、目標減速度設定手段52Dは、設定した目標減速度を目標制御圧設定手段52Bの偏差量算出手段B3に出力するように構成されている。
【0054】
偏差量算出手段B3は、実減速度算出手段52Cから送られてくる実減速度と、目標減速度設定手段52Dから送られてくる目標減速度との偏差量を算出する機能(図5;ステップS4)を有している。ここで、「偏差量」とは、目標減速度の絶対値から実減速度の絶対値を引いた値をいう。そして、偏差量算出手段B3は、算出した偏差量を増圧分算出手段B2に出力するように構成されている。
【0055】
増圧分算出手段B2は、偏差量算出手段B3で算出した偏差量に基づいて目標制御圧の増圧分を算出する機能、詳しくは偏差量に所定の係数を乗算することで増圧分を算出する機能(図5;ステップS5)を有している。そして、この増圧分算出手段B2は、算出した増圧分がゼロより大きいときのみ、その増圧分を加算手段B1に出力するように構成されている。ちなみに、偏差量算出手段B3と増圧分算出手段B2が作動する一例を挙げるとすると、運転者がブレーキペダルBPを踏んだときに、その踏み込み量であれば得られたはずのブレーキ力が得られずに、目標減速度と実減速度とが離れてしまった場合であっても、これらの偏差に基づいて算出された増圧分が目標制御圧に加算されることで、良好な制動力が得られるようになっている。
【0056】
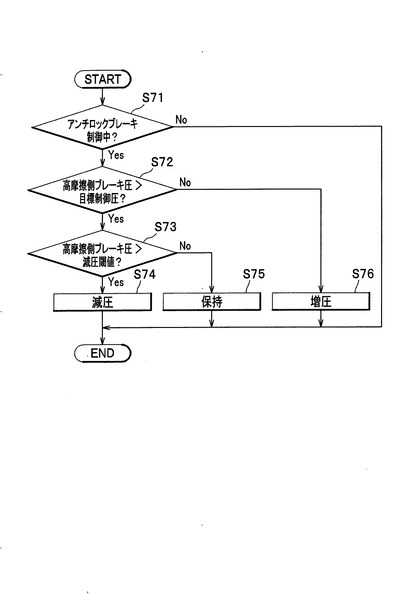
高摩擦側ブレーキ圧制御手段52Eは、加算手段B1から出力される目標制御圧(または新目標制御圧;以下、新目標制御圧も含めて目標制御圧という)と、候補算出手段A1から許容差圧選択手段A2および加算手段B1を介して出力される高摩擦側ブレーキ圧とに基づいて、高摩擦側ブレーキ圧が目標制御圧に合うように、適宜、液圧ユニット51の入口弁1、出口弁2およびポンプ4(図2参照)等を制御する機能(図5;ステップS7)を有している。なお、この高摩擦側ブレーキ圧制御手段52Eは、アンチロックブレーキ制御の開始をきっかけにして作動する、すなわちアンチロックブレーキ制御手段52Fから制御開始を示す開始信号を受け取ったときに初めて、高摩擦側ブレーキ圧を目標制御圧に合うように制御するように構成されている。具体的には、この高摩擦側ブレーキ圧制御手段52Eは、図6に示す処理に従って制御を行うようになっている。
【0057】
以下に、図6を参照して、高摩擦側ブレーキ圧制御手段52Eの機能について詳細に説明する。
【0058】
高摩擦側ブレーキ圧制御手段52Eでは、まず、アンチロックブレーキ制御中であるか否かが判断され(ステップS71)、アンチロックブレーキ制御中でないと判断された場合には(No)、そのまま制御が終了する(END)。また、ステップS71において、アンチロックブレーキ制御中であると判断された場合には(Yes)、高摩擦側ブレーキ圧が目標制御圧を超えたか否かが判断される(ステップS72)。そして、ステップS72において高摩擦側ブレーキ圧が目標制御圧を超えたと判断された場合には(Yes)、高摩擦側ブレーキ圧が減圧閾値(目標制御圧に所定値を加算した値)を超えたか否かが判断される(ステップS73)。そして、高摩擦側ブレーキ圧が減圧閾値を超えている場合には(Yes)、高摩擦側ブレーキ圧が減圧され(ステップS74)、超えていない場合には(No)、高摩擦側ブレーキ圧が保持されて(ステップS75)、この制御が終了する(END)。
【0059】
また、ステップS72において、高摩擦側ブレーキ圧が目標制御圧を超えていないと判断された場合には(No)、高摩擦側ブレーキ圧が増圧された後(ステップS76)、制御が終了する(END)。ここで、増圧制御では、目標制御圧と現在の高摩擦側ブレーキ圧との偏差量が大きいほど、増圧速度を上げて目標制御圧に早く近づけるといった制御がなされている。
【0060】
なお、図6のフローが終了した後は、図5のフローに戻り、前記した各ステップS1〜S7が繰り返されることとなる(Return)。そして、この図5のフローは、アンチロックブレーキ制御が終了すると同時に終了するようになっている。
【0061】
次に、直進状態でブレーキをかけることによりアンチロックブレーキ制御が開始された後で車体を旋回させる場合における差圧制御(図5,6に示す制御)について説明する。すなわち、アンチロックブレーキ制御の開始により横加速度が正確に推定できなくなったときの差圧制御について説明する。
【0062】
直進状態で運転者がブレーキをかけた場合には、横加速度がほとんど車体にかかっていないので、第2マップM2から求められる許容差圧は0となる。また、アンチロックブレーキ制御が先に開始された車輪Tが低摩擦側と認定されることによって、低摩擦側ブレーキ圧の値が特定された後は、第3マップM3によって許容差圧が設定される。ここで、本実施形態では、説明の便宜上、低摩擦側ブレーキ圧はあまり高くないものとし、第3マップM3から求められる許容差圧が0であるものとして説明する。
【0063】
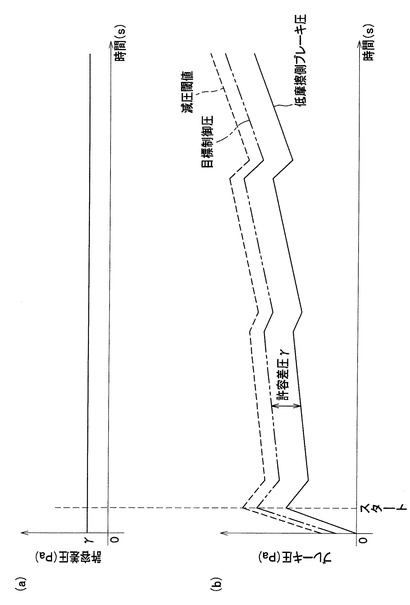
そして、第1マップM1では、すべての車体速度において0よりも大きな許容差圧が設定されているので、第1マップM1から求められる許容差圧は0よりも大きな値となる。したがって、各マップM1,M2,M3から求められる各許容差圧のうちの最大の許容差圧は、第1マップM1から求められる許容差圧となる。そして、これを横軸を時間としたグラフに示すと、図7(a)に示すように、本差圧制御中においては、第1マップM1と同様の一定の許容差圧(γ)に設定されることとなる。
【0064】
そして、このように許容差圧が差圧制御中に常に一定になることによって、図7(b)に示すように、路面状況等に応じて低摩擦側ブレーキ圧が経時変化した場合には、この低摩擦側ブレーキ圧に前記した許容差圧が加算されて導出される高摩擦側ブレーキ圧の目標制御圧は、図の二点鎖線で示すように低摩擦側ブレーキ圧に沿うようにして(低摩擦側ブレーキ圧をオフセットしたように)経時変化することとなる。さらに、この目標制御圧に所定値を加算することで設定される減圧閾値(目標制御圧に所定値を足した値)は、図の破線で示すように、目標制御圧に沿うようにして(目標制御圧をオフセットしたように)経時変化する。
【0065】
次に、高摩擦側ブレーキ圧の制御方法について図8を参照して説明する。
【0066】
図8に示すように、運転者がブレーキペダルBPを踏み込むと(時刻t1)、目標制御圧の算出が開始されるとともに、左右後輪のブレーキ圧は共に上昇していく(時刻t1〜t2)。そして、直進状態で運転者がブレーキをかけた後車体を旋回させると、車体が左右方向外側に傾くことにより左右方向内側の後輪(内輪)が先に滑って、アンチロックブレーキ制御が開始され、滑った内輪に加わるブレーキ圧(低摩擦側ブレーキ圧)が減圧される(時刻t2)。
【0067】
なお、この制御は、図5に示す基本フローにおいて、START→ステップS1〜S7→RETURNの流れで進行し、ステップS7において条件に応じた各種制御が行われるようになっている。ステップS7における制御(以下、単に「ブレーキ圧制御」という。)は、時刻t1〜t2の間においては、図6に示すように、START→ステップS71(No)→ENDの流れで進行する。また、時刻t2〜t3の間のブレーキ圧制御は、START→ステップS71(Yes)→ステップS72(No)→ステップS76→ENDの流れで進行する。ここで、時刻t2〜t3の間におけるステップS76(増圧制御)では、アンチロックブレーキ制御開始前(時刻t1)から既に開放されている入口弁1(図2参照)をそのまま開放させておくといった制御が行われ、結果的に高摩擦側ブレーキ圧(外輪)の増圧が行われるようになっている。
【0068】
そして、図8に戻って説明すると、時刻t3において、高摩擦側ブレーキ圧が目標制御圧を上回ると、高摩擦側ブレーキ圧の保持制御が行われ、時刻t4において、高摩擦側ブレーキ圧が減圧閾値を上回ると、高摩擦側ブレーキ圧の減圧制御が行われる。さらに、時刻t5において、高摩擦側ブレーキ圧が目標制御圧を下回ると、高摩擦側ブレーキ圧の増圧制御が行われる。
【0069】
なお、時刻t3〜t4の間の保持制御は、図6に示すように、START→ステップS71(Yes)→ステップS72(Yes)→ステップS73(No)→ステップS75→ENDの流れで進行する。また、時刻t4〜t5の間の減圧制御は、START→ステップS71(Yes)→ステップS72(Yes)→ステップS73(Yes)→ステップS74→ENDの流れで進行する。さらに、時刻t5〜t6の増圧制御は、START→ステップS71(Yes)→ステップS72(No)→ステップS76→ENDの流れで進行する。
【0070】
ちなみに、増圧制御では、前記したように目標制御圧と高摩擦側ブレーキ圧との偏差量が大きいほど増圧速度を上げているため、例えば時刻t7において偏差量が大きくなると増圧速度を上げて迅速に目標制御圧に到達させるようになっている。なお、本実施形態では、増圧速度が緩やかなものと急なものの2種類しか開示していないが、実際には、細かく増圧速度の持ち替えを行うのがよく、より好ましくは増圧速度の持ち替えはリニア(連続的)に行われるのがよい。
【0071】
なお、図8に示す目標制御圧は、図7(a)および(b)で示したように算出されたもの、すなわち高μ路側の車輪Tの実減速度と目標減速度の偏差量がゼロ以下である場合の目標制御圧を示したものである。ちなみに、実減速度と目標減速度の偏差量がゼロより大きくなる場合は、目標制御圧には、新たに増圧分が加算され、図7(b)とは異なるように経時変化する。そのため、この場合には、左右後輪の差圧をより大きくすることが可能となっている。
【0072】
以下に、実減速度と目標減速度の偏差量がゼロより大きくなった場合の目標制御圧の経時変化について述べる。
【0073】
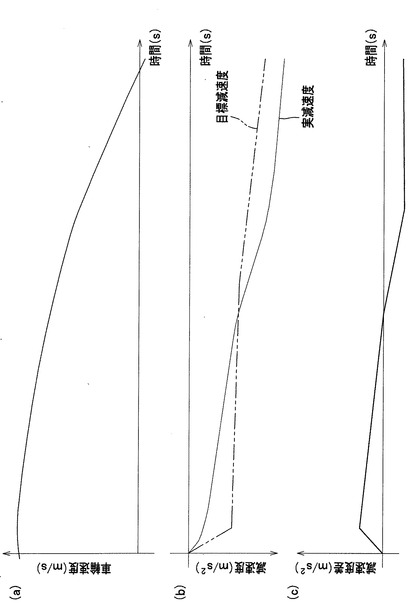
図9(a)に示すように、ブレーキペダルBPの踏み込みにより、車輪速度が図で示すように経時変化したときにおいて、図9(b)に示すように、実減速度が図の実線で示すように経時変化し、目標減速度が図の二点鎖線で示すように経時変化したとする。この場合、前記した偏差量算出手段B3で実減速度と目標減速度の偏差量(減速度差)が随時算出されることによって、その偏差量は、図9(c)に示すように経時変化する。ここで、図9(b)に示す縦軸〔減速度〕は、下向きを正としており、図9(c)に示す縦軸〔減速度差〕は、上向きを正としている。つまり、図9(b)の経時変化の前半については、実減速度が目標減速度まで到達しておらず、到達するには偏差量に相当するブレーキ力が必要な状態(不足した状態)となっており、後半については、実減速度が目標減速度を超えているためブレーキ力は十分足りている状態となっている。そのため、図9(c)は、偏差量(減速度差)が正である場合はブレーキ力が不足していることを示し、負である場合はブレーキ力が十分足りていることを示している。
【0074】
そして、前記したように偏差量が経時変化する場合、偏差量算出手段B3は、その偏差量がゼロより大きい場合にのみ、その偏差量を前記した増圧分算出手段B2に出力することから、図10(a)および(b)に示すように、増圧分算出手段B2で算出される増圧分は、正の偏差量に対応した範囲において経時変化し、負の偏差量に対応した範囲においてはゼロとなる。そのため、この増圧分が前記した加算手段B1によって目標制御圧に加算されると、図10(c)に示すように、目標制御圧の前半は、増圧分だけ持ち上げられて経時変化する。
【0075】
以上によれば、本実施形態において、次のような効果を得ることができる。
車体速度から求めた左右後輪の許容差圧が常に0よりも大きな値γとなるので、横加速度の推定が困難な場合であっても、旋回時に左右後輪に差圧を持たせることができ、旋回外輪の制動力を効率よく発揮させることができる。
【0076】
アンチロックブレーキ制御が実行されている場合には、推定した横加速度が前回値よりも増大するのが禁止されるので、直進時にアンチロックブレーキ制御が開始された後、車体が旋回する場合には、横加速度が0付近の値でそれ以上増大することがない。そこで、第2マップM2から求められる許容差圧よりも第1マップM1から求められる許容差圧を大きな値γに設定することで、この際の許容差圧は、第1マップM1の許容差圧に設定される。したがって、アンチロックブレーキ制御が実行されて横加速度が正確に推定できない場合には、第1マップM1の許容差圧で左右後輪の差圧が許容されるので、横加速度の推定が困難な場合であっても旋回外輪の制動力を効率よく発揮させることができる。
【0077】
また、アンチロックブレーキ制御が実行されていない場合には、正確に横加速度が推定されるので、正確な横加速度から求められる第2マップM2の許容差圧を含めた複数の候補の中から最適な許容差圧を決めて、旋回などに適した良好な制御を行うことができる。特に、横加速度が所定値β以上のときには、第1マップM1よりも大きな許容差圧を第2マップM2から選ぶことができ、旋回外輪の制動力をより高くすることができる。
【0078】
車両の運動状態を示す車体速度、横加速度および低摩擦側ブレーキ圧のそれぞれに対応した許容差圧のうちの最大値に基づいて、高摩擦側ブレーキ圧が制御されるので、そのときの車両の運動状態に適した最大の制動力を得ることができる。
【0079】
各マップM1,M2,M3から許容差圧を導出するように構成したので、例えば各マップM1,M2,M3を、様々な車種に対応した実験やシミュレーションなどから作成しておけば、各車種に対応した正確なブレーキ圧の制御を実現することが可能となる。
【0080】
実減速度が目標減速度よりも不足する場合には、実減速度と目標減速度との偏差量に基づいて算出された増圧分だけ目標制御圧が上昇されるので、正確に算出された増圧分によって最適な制動力を得ることができる。
【0081】
以上、本発明は、前記実施形態に限定されることなく、様々な形態で実施される。
本実施形態では、車両の運動状態を示すパラメータを3つとしたが、パラメータはいくつであってもよく、車体速度を取得または推定するためのパラメータを有していれば、他は適宜選択できる。また、「車両の運動状態を示すパラメータ(許容差圧に影響のあるパラメータ)」としては、本実施形態で挙げたものの他に、例えば、車輪速度、ヨーレイト、車体加速度などであってもよい。
【0082】
本実施形態では、目標制御圧の増圧分を偏差量に基づいて算出したが、本発明はこれに限定されず、例えば偏差量に関係なく単純に増圧分を所定値に固定させてもよい。
本実施形態では、目標制御圧に増圧分を加算したが、本発明はこれに限定されず、許容差圧設定手段52A(許容差圧選択手段A2)において選択した許容差圧に増圧分を加算してもよい。
【0083】
本実施形態では、ブレーキ圧センサによって実際のブレーキ圧を検出したが、本発明はこれに限定されず、他のパラメータからブレーキ圧を推定してもよい。
また、横加速度も、横加速度センサで検出してもよい。この場合であっても、横加速度センサが故障した場合には、本発明を有効に活用することができる。
【0084】
前記実施形態では、各マップM1〜M3から許容差圧を求めたが、本発明はこれに限定されず、計算式などから許容差圧を求めてもよい。また、複数のマップを用いずに、1つのマップ(第1マップM1)のみを用いて許容差圧を求めてもよい。
【0085】
また、許容差圧設定手段は、次に説明するように、アンチロックブレーキ制御を開始する際の車輪速度から現在の車輪速度までの速度変化量が所定値を越えるまでは、左右後輪の許容差圧を0に保つように構成されていてもよい。具体的には、制御装置を、図11に示すような形態としてもよい。なお、以下に図11の形態について説明するが、この形態は、前記実施形態(図3参照)の一部を変更したものなので、前記実施形態と同様の構成要素についてはその説明は省略することとする。
【0086】
図11に示すように、制御装置52’は、前記実施形態とは多少異なるアンチロックブレーキ制御手段52F’、許容差圧設定手段52A’および目標制御圧設定手段52B’を備えている。
【0087】
アンチロックブレーキ制御手段52F’は、アンチロックブレーキ制御の開始を示す開始信号を速度変化量算出手段A4にも出力するように構成されている。
【0088】
許容差圧設定手段52A’は、許容差圧選択手段A2’と、速度変化量算出手段A4と、制限許容差圧設定手段A5と、差圧制限値設定手段A6とを新たに備えている。
【0089】
許容差圧選択手段A2’は、前記実施形態と同じ方法で選択した許容差圧を差圧制限値設定手段A6に出力するように構成されている。
【0090】
速度変化量算出手段A4は、高摩擦側の車輪速度の変化に応じて車輪速度の速度変化量を算出する機能(図12;ステップS2A)を有している。具体的には、アンチロックブレーキ制御手段52F’から開始信号を受け取ったときに、高摩擦側の車輪速度を基準速度として保持設定し、この基準速度に対する高摩擦側の車輪速度の変化(偏差量)を速度変化量として算出するようになっている。ここで、「速度変化量」とは、基準速度から現在の高摩擦側の車輪速度を引いた値をいい、図13(a)に示すように、時間の経過に応じて基準速度に対して現在の車輪速度が徐々に低下することによって、速度変化量は時間の経過に応じて徐々に大きくなっている。そして、速度変化量算出手段A4は、算出した速度変化量を制限許容差圧設定手段A5に出力するように構成されている。
【0091】
制限許容差圧設定手段A5は、速度変化量算出手段A4で算出した速度変化量に基づいて許容差圧(以下、制限許容差圧設定手段A5で算出された許容差圧を制限許容差圧とも呼ぶ。)を算出する機能(図12;ステップS2B)を有している。詳しくは、制限許容差圧設定手段A5は、記憶手段A3に記憶された図14に示す第4マップM4を参照することで制限許容差圧を算出する機能を有している。
【0092】
具体的に、第4マップM4(速度変化量用マップ)は、速度変化量が0から所定値ΔV1までの間において左右後輪の制限許容差圧が0であり、速度変化量が所定値ΔV1を超えた後は制限許容差圧が徐々に上昇するように設定されている。さらに、速度変化量が、所定値ΔV1よりも大きな所定値ΔV2を越えた後は、第1マップM1の許容差圧γよりも大きな一定の値に維持されるように設定されている(図13(b)参照)。そして、制限許容差圧設定手段A5は、算出した制限許容差圧を差圧制限値設定手段A6に出力するように構成されている。
【0093】
差圧制限値設定手段A6は、許容差圧選択手段A2’から送られてくる許容差圧と、制限許容差圧設定手段A5から送られてくる制限許容差圧とを比較し、これらに差がある場合には、これらのうち低い方を差圧制限値(後の制御で利用する許容差圧)として設定し、差がない場合(同じ値である場合)には、これらのうちいずれか一方を差圧制限値として設定する機能(図12;ステップS2C)を有している。具体的には、図13(b)に示すように、アンチロックブレーキ制御の開始時には、制限許容差圧がゼロに設定されて許容差圧よりも低くなるので、制限許容差圧が差圧制限値に設定される。また、アンチロックブレーキ制御が進行するにつれて制限許容差圧が大きくなって許容差圧を上回ると、低い方である許容差圧が差圧制限値として設定される。つまり、アンチロックブレーキ制御の開始時には、制限許容差圧が許容差圧とみなされて差圧制限値に設定され、ブレーキ圧の制御が進行するにつれて制限許容差圧が許容差圧を上回ると、制限許容差圧から許容差圧に戻されて許容差圧が差圧制限値に設定されることとなる。そして、差圧制限値設定手段A6は、設定した差圧制限値を目標制御圧設定手段52B’の加算手段B1’に出力するように構成されている。
【0094】
加算手段B1’は、増圧分算出手段B2から信号が出力されてこないときは、差圧制限値設定手段A6から出力されてくる差圧制限値に、許容差圧設定手段52A’から出力されてくる低摩擦側ブレーキ圧を足し合わせ、その値を目標制御圧として設定する機能(図12;ステップS3’)を有している。また、この加算手段B1’は、増圧分算出手段B2から信号が出力されてきた場合には、その信号(増圧分)を、前記した目標制御圧に足し合わせることで目標制御圧を上昇させ、その値を新目標制御圧として設定する機能も有している(図12;ステップS6)。
【0095】
次に、図11の実施形態に係る制御装置52’の動作について簡単に説明する。
図12に示すように、制御装置52’の動作は基本的には、前記実施形態(図5)と同様であるが、新たにステップS2A、S2B、S2Cを加えた点と、ステップS3’として前記実施形態と異なる手法で高摩擦側ブレーキ圧の目標制御圧を設定するようにした点で異なっている。そのため、以下の説明では、前記実施形態に比べて特に異なる動作となるステップS2A〜S3’のみを説明する。
【0096】
ステップS2Aでは、速度変化量算出手段A4によって、高摩擦側の車輪速度の変化に応じた車輪速度の速度変化量が算出される。また、ステップS2Bでは、制限許容差圧設定手段A5によって、速度変化量算出手段A4で算出した速度変化量と第4マップM4に基づいて制限許容差圧が算出される。そして、ステップS2Cでは、許容差圧選択手段A2’から送られてくる許容差圧と、制限許容差圧設定手段A5から送られてくる制限許容差圧とのうち低い方が差圧制限値として設定される。その後、ステップS3’では、加算手段B1’によって、ステップS2Cで設定された差圧制限値に低摩擦側ブレーキ圧が足し合わされ、その値が目標制御圧として設定される。
【0097】
具体的には、例えば、直進状態でブレーキをかけることでアンチロックブレーキ制御が開始された後で車体を旋回させる場合には、前記実施形態と同様に、各マップM1〜M3のうち第1マップM1から左右後輪の許容差圧が選択される。そして、これを横軸を時間としたグラフに示すと、図13(b)に破線で示すように、第1マップM1の許容差圧は時間の経過に関わらず常に一定の値に維持される。
【0098】
一方、図14に示す第4マップM4から求められる左右後輪の制限許容差圧は、速度変化量が時間の経過に伴って徐々に大きくなることにより、図13(b)に2点鎖線で示すように、時間の経過に伴って第4マップM4と略同じ傾向で変化する。
【0099】
そのため、差圧制限値は、図13(b)に実線で示すように、アンチロックブレーキ制御の前半においては制限許容差圧の値となり、後半においては許容差圧の値となる。具体的には、アンチロックブレーキ制御の初期においては、差圧制限値は0に維持され、その後徐々に上がっていき、後期においては許容差圧γに維持されるようになっている。すなわち、時刻t8において、差圧制限値を求めるためのマップが、第4マップM4から第1マップM1に切り替わるようになっている。
【0100】
そして、このように決定された差圧制限値が低摩擦側ブレーキ圧に加算されることで、図13(c)に示すように、目標制御圧や減圧閾値が決定される。
【0101】
以上、図11に示す形態によれば、アンチロックブレーキ制御の初期において左右後輪の許容差圧(差圧制限値)を0に維持することができる。そのため、例えばスプリット路の直進時にアンチロックブレーキ制御が実行される場合において、左右後輪の許容差圧を0に維持することができるので、車両の安定性を向上させることができる。
【0102】
また、第4マップM4が、速度変化量が0から所定値ΔV1までの間において左右後輪の制限許容差圧が0であり、速度変化量が所定値ΔV1を超えた後は制限許容差圧が徐々に上昇するように設定されているので、徐々に上昇する区間を使って第4マップM4から他のマップにスムーズに移行することができる。そのため、許容差圧が0からいきなり大きな値に飛んでしまうのを防止することができるので、許容差圧の大きな変動を抑えて、車両の安定性を向上させることができる。
【0103】
さらに、速度変化量算出手段A4によって、車輪速度の速度変化量は、車輪スリップの小さい高摩擦側の車輪速度の変化に応じて算出されるので、速度変化量の算出が適切に行われるようになり、その結果、速度変化量に対応する制限許容差圧が適切に設定されるようになる。したがって、左右のブレーキ圧の差が大きくなりすぎるのをより確実に抑制することができる。
【符号の説明】
【0104】
10 車輪速センサ
50 車両用ブレーキ圧制御装置
51 液圧ユニット
52 制御装置
52A 許容差圧設定手段
52B 目標制御圧設定手段
52E 高摩擦側ブレーキ圧制御手段
52F アンチロックブレーキ制御手段
52G 横加速度推定手段
CR 車両
M1 第1マップ
M2 第2マップ
M4 第4マップ
T 車輪
【技術分野】
【0001】
本発明は、スプリット路面(摩擦係数が部分的に異なる路面)走行時や旋回時等において左右輪の差圧(左右輪にかかるブレーキ圧の差)を制御する車両用ブレーキ圧制御装置に関する。
【背景技術】
【0002】
近年、一般的な車両用ブレーキ圧制御装置は、低μ路(低摩擦路)で車輪がロックするのを防止するアンチロックブレーキ制御機能を有しているが、各車輪のスリップ率に基づいて各車輪に加わるブレーキ圧が制御されるので、例えばスプリット路面などにおいては左右輪の差圧が大きくなりすぎてしまう場合がある。
【0003】
これを対策する技術としては、従来、車体速度などに基づいて許容差圧を決定する許容差圧設定手段を有し、決定した許容差圧と、左右輪のうちの低摩擦側の車輪に加わる低摩擦側ブレーキ圧とを足し合わせた値を、目標制御圧として高摩擦側の車輪に加わる高摩擦側ブレーキ圧を制御するものが知られている(特許文献1参照)。具体的に、許容差圧設定手段は、図15(a)に示す車体速度に対応した許容差圧が設定されている第1マップM10と、図15(b)に示す横加速度に対応した許容差圧が設定されている第2マップM20とを主に備えている。なお、従来技術では、許容差圧設定手段が3つのマップを参照するようになっているが、説明を簡単にするため、2つのマップで説明を行うこととする。
【0004】
第1マップM10は、車体速度が所定値以上で左右後輪の許容差圧が0になるように設定されている。また、第2マップM20は、横加速度が所定値以上で左右後輪の許容差圧が0から徐々に大きくなるように設定されている。そして、許容差圧設定手段では、車体速度や横加速度に基づいて各マップM10,M20からそれぞれ許容差圧を求め、これらの許容差圧のうち最大のものを制御に用いる許容差圧として決定している。
【0005】
この技術によれば、車体速度や横加速度などの車両の状態に応じて決められた許容差圧に、低摩擦側ブレーキ圧と高摩擦側ブレーキ圧との差圧を保つことができ、左右輪の差圧が大きくなりすぎることが防止されている。また、横加速度が発生する旋回時には、第2マップM20が参照されて、左右後輪の差圧がある程度大きな値の許容差圧に保たれるので、内輪よりも外輪のブレーキ圧を大きくして、旋回外輪の制動力を十分に発揮することが可能となっている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−55583号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、上記従来技術において横加速度を横加速度センサを用いずに車輪速度から推定して算出しようとする場合、アンチロックブレーキ制御が行われている状態においては車輪速度が大きく変化することから横加速度を正確に推定することが難しくなる。
【0008】
このような場合には、旋回時であっても第2マップM20ではなく第1マップM10を用いることが望まれる。また、横加速度センサが故障した場合も同様に、旋回時であっても第1マップM10を用いることが望まれる。
【0009】
しかしながら、従来技術では、第1マップM10において車体速度が所定値以上で左右後輪の許容差圧が0になるように設定していたので、第1マップM10が選択された旋回時においては左右後輪の差圧が0となり、旋回外輪の制動力を効率よく発揮させることが難しかった。
【0010】
そこで、本発明では、横加速度を制御に用いることが困難な場合であっても旋回時において旋回外輪の制動力を効率よく発揮することができる車両用ブレーキ圧制御装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
前記課題を解決する本発明は、車両の運動状態を示すパラメータに基づいて同一車軸上の左右輪の許容差圧を設定する許容差圧設定手段と、前記許容差圧設定手段で設定した前記許容差圧と左右輪のうちの低摩擦側の車輪に加わる低摩擦側ブレーキ圧とを足し合わせた値を高摩擦側の車輪に加わる高摩擦側ブレーキ圧の目標制御圧として設定する目標制御圧設定手段と、前記高摩擦側ブレーキ圧を前記目標制御圧に基づいて制御する高摩擦側ブレーキ圧制御手段と、を備えた車両用ブレーキ圧制御装置であって、前記許容差圧設定手段は、車体速度に基づいて左右後輪の許容差圧を求めるように構成され、車体速度から求めた左右後輪の許容差圧が常に0よりも大きな値になるように構成されていることを特徴とする。
【0012】
ここで、「許容差圧」とは、左側の車輪に加わるブレーキ圧と右側の車輪に加わるブレーキ圧との差が路面状況(車両の運動状態)等に応じて、どの程度まで大きくなってよいかを示す指標の圧力をいう。また、「車両の運動状態を示すパラメータ」とは、車体速度、横加速度、ブレーキ圧などのパラメータをいう。
【0013】
本発明によれば、車体速度から求めた左右後輪の許容差圧が常に0よりも大きな値となるので、例えば従来のように横加速度の推定が困難な場合や横加速度センサが故障した場合(すなわち旋回時において横加速度を使わずに車体速度から許容差圧を決めたい場合)であって、横加速度を制御に用いることが困難な場合(車両の運動状態を示すパラメータとして用いることが困難な場合)であっても、旋回時に左右後輪に差圧を持たせることができる。これにより、旋回外輪の制動力を効率よく発揮させることができる。
【0014】
また、本発明は、車輪のロックを防止するアンチロックブレーキ制御を実行するアンチロックブレーキ制御手段と、横加速度を左右の車輪速度差から推定する横加速度推定手段と、をさらに備え、前記許容差圧設定手段は、推定した横加速度に基づいて左右後輪の許容差圧を求めるように構成され、前記車体速度から求めた許容差圧を第1候補とするとともに、前記横加速度から求めた許容差圧を第2候補とし、少なくとも前記第1候補および前記第2候補を含む複数の候補のうち最大のものを前記目標制御圧設定手段で用いる許容差圧として決定し、前記横加速度推定手段は、前記アンチロックブレーキ制御が実行されている場合には、推定した横加速度が前回値よりも増大するのを禁止するように構成され、前記第1候補の許容差圧が、横加速度が0から所定値までの間において求められる第2候補の許容差圧よりも大きな値に設定されていてもよい。
【0015】
これによれば、アンチロックブレーキ制御が実行されている場合には、推定した横加速度が前回値よりも増大するのが禁止されるので、例えば、直進時にアンチロックブレーキ制御が開始された後、車体が旋回する場合には、横加速度が0付近(0から所定値までの間)の値でそれ以上増大することがない。そこで、0付近の横加速度から求められる第2候補の許容差圧よりも、第1候補の許容差圧を大きな値に設定することで、この際の許容差圧は、第1候補の許容差圧に設定される。したがって、アンチロックブレーキ制御が実行されて横加速度の推定が困難な場合であっても、少なくとも0よりも大きく、第2候補の許容差圧よりも大きな第1候補の許容差圧の値に左右後輪の差圧が許容されるので、旋回外輪の制動力を効率よく発揮させることができる。
【0016】
また、アンチロックブレーキ制御が実行されていない場合には、正確に横加速度が推定されるので、正確な横加速度から求められる第2候補の許容差圧を含めた複数の候補の中から最適な許容差圧を決めて、旋回などに適した良好な制御を行うことができる。
【0017】
また、本発明では、前記許容差圧設定手段が、前記アンチロックブレーキ制御を開始する際の車輪速度から現在の車輪速度までの速度変化量が所定値を越えるまでは、左右後輪の許容差圧を0に保つように構成されていてもよい。
【0018】
ここで、「アンチロックブレーキ制御を開始する際の車輪速度」とは、アンチロックブレーキ制御の開始時点での車輪速度を意味する他、アンチロックブレーキ制御の開始時点よりも少し前の車輪速度をも含む。
【0019】
これによれば、制動初期(アンチロックブレーキ制御開始時)において、左右後輪の許容差圧を0にすることができるので、スプリット路での車両の安定性を向上させることができる。
【発明の効果】
【0020】
本発明によれば、車体速度から求めた左右後輪の許容差圧が常に0よりも大きな値となるので、横加速度を制御に用いることが困難な場合であっても旋回時において旋回外輪の制動力を効率よく発揮することができる。
【図面の簡単な説明】
【0021】
【図1】本実施形態に係る車両用ブレーキ圧制御装置を搭載した車両を示す構成図である。
【図2】車両用ブレーキ圧制御装置の液圧ユニットの詳細を示す構成図である。
【図3】制御装置の構成を示すブロック図である。
【図4】車体速度と許容差圧との関係を示す第1マップ(a)と、横加速度と許容差圧との関係を示す第2マップ(b)と、低摩擦側ブレーキ圧と許容差圧との関係を示す第3マップ(c)である。
【図5】制御装置の機能を示すフローチャートである。
【図6】高摩擦側ブレーキ圧制御手段の機能を示すフローチャートである。
【図7】許容差圧の経時変化の一例を示すグラフ(a)と、低摩擦側ブレーキ圧と目標制御圧の経時変化の一例を示すグラフ(b)である。
【図8】高摩擦側ブレーキ圧の制御方法を示すグラフである。
【図9】車輪速度の経時変化の一例を示すグラフ(a)と、目標減速度と実減速度の経時変化の一例を示すグラフ(b)と、減速度差の経時変化の一例を示すグラフ(c)である。
【図10】減速度差の経時変化の一例を示すグラフ(a)と、減速度差に基づいて算出された増圧分の経時変化の一例を示すグラフ(b)と、増圧分が加算された目標制御圧の経時変化の一例を示すグラフ(c)である。
【図11】他の実施形態に係る制御装置の構成を示すブロック図である。
【図12】図11の制御装置の動作を示すフローチャートである。
【図13】基準速度および速度変化量の経時変化の一例を示すグラフ(a)と、許容差圧と制限許容差圧の経時変化の一例を示すグラフ(b)と、低摩擦側ブレーキ圧と目標制御圧の経時変化の一例を示すグラフ(c)である。
【図14】速度変化量と許容差圧との関係を示す第4マップである。
【図15】従来技術における、車体速度と許容差圧との関係を示す第1マップ(a)と、横加速度と許容差圧との関係を示す第2マップ(b)である。
【発明を実施するための形態】
【0022】
次に、本発明の実施形態について、適宜図面を参照しながら詳細に説明する。
図1に示すように、車両CRには、車輪速センサ10、ペダルセンサ30およびブレーキ圧センサ40が設けられるとともに、これらのセンサ10,30,40で検出した信号に基づいてブレーキ圧(詳しくは、ブレーキ液圧)を制御する車両用ブレーキ圧制御装置50が設けられている。
【0023】
車輪速センサ10は、各車輪Tの車輪速度を検出するセンサであり、各車輪Tのそれぞれに1つずつ設けられている。そして、各車輪速センサ10は、車両用ブレーキ圧制御装置50に接続されており、これにより車両用ブレーキ圧制御装置50が4つの車輪Tの全ての車輪速度を取得することが可能となっている。なお、前記した4つの車輪速センサ10は、それぞれ固有のIDを持っており、これにより車両用ブレーキ圧制御装置50において各車輪速センサ10から送られてくる各信号が、どの車輪Tの速度であるのかを認識することができるようになっている。
【0024】
ペダルセンサ30は、ブレーキペダル(ブレーキ操作子)BPからマスタシリンダMCに入力されるブレーキ踏力に応じたブレーキ圧を、ブレーキペダルBPの踏み込み量(操作量)として検出するセンサである。そして、このペダルセンサ30は、車両用ブレーキ圧制御装置50に接続されており、これにより車両用ブレーキ圧制御装置50がブレーキペダルBPの踏み込み量を取得することが可能となっている。
【0025】
ブレーキ圧センサ40は、各車輪Tに設けられた各キャリパC内のブレーキ圧を検出するセンサであり、各キャリパCのそれぞれに1つずつ設けられている。そして、各ブレーキ圧センサ40は、車両用ブレーキ圧制御装置50に接続されており、これにより車両用ブレーキ圧制御装置50が4つの車輪Tに加わる全てのブレーキ圧を取得することが可能となっている。なお、前記した4つのブレーキ圧センサ40は、それぞれ固有のIDを持っており、これにより車両用ブレーキ圧制御装置50において各ブレーキ圧センサ40から送られてくる各信号が、どの車輪Tに加わるブレーキ圧であるのかを認識することができるようになっている。
【0026】
車両用ブレーキ圧制御装置50は、車両CRの各車輪Tに付与する制動力(ブレーキ圧)を適宜制御するためのものであり、油路や各種部品が設けられた液圧ユニット51と、液圧ユニット51内の各種部品を適宜制御するための制御装置52とを主に備えている。
なお、液圧ユニット51から出力されるブレーキ圧は、配管を介して各車輪Tに設けられたキャリパCに供給されるようになっており、各キャリパCにブレーキ圧が付与されることで、各車輪Tに車輪ブレーキFL,RL,FR,RRの制動力が働くようになっている。
【0027】
以下に、車両用ブレーキ圧制御装置50の液圧ユニット51の構成について図2を参照して説明する。
【0028】
液圧ユニット51は、運転者がブレーキペダルBPに加える踏力に応じたブレーキ圧を発生するマスタシリンダMCと、車輪ブレーキFL,RR,RL,FRとの間に配置されている。マスタシリンダMCの二つの出力ポートMC1,MC2は、液圧ユニット51の入口ポート121に接続され、液圧ユニット51の出口ポート122が、各車輪ブレーキFL,RR,RL,FRに接続されている。そして、通常時は液圧ユニット51の入口ポート121から出口ポート122までが連通した油路となっていることで、ブレーキペダルBPの踏力が各車輪ブレーキFL,RR,RL,FRに伝達されるようになっている。
【0029】
液圧ユニット51には、各車輪ブレーキFL,RR,RL,FRに対応して四つの入口弁1、四つの出口弁2、および四つのチェック弁1aが設けられる。また、出力ポートMC1,MC2に対応した各出力液圧路91,92に対応して二つのリザーバ3、二つのポンプ4、二つのダンパ5、および二つのオリフィス5aが設けられ、二つのポンプ4を駆動するための電動モータ6を備えている。
【0030】
入口弁1は、各車輪ブレーキFL,RR,RL,FRとマスタシリンダMCとの間に配置された常開型の電磁弁である。入口弁1は、通常時に開いていることで、マスタシリンダMCから各車輪ブレーキFL,RR,RL,FRへブレーキ圧が伝達するのを許容している。また、入口弁1は、車輪がロックしそうになったときに制御装置52(図1参照)によってアンチロックブレーキ制御が実行されることで閉塞され、これによりブレーキペダルBPから各車輪ブレーキFL,RR,RL,FR側に伝達する液圧が遮断される。また、アンチロックブレーキ制御中においては、制御装置52によって入口弁1が適宜開放されることで、再びブレーキ踏力に基づくブレーキ圧が各車輪ブレーキFL,RR,RL,FR側に伝達され、各ブレーキ圧が増圧されるようになっている。
【0031】
出口弁2は、各車輪ブレーキFL,RR,RL,FRと各リザーバ3との間に配置された常閉型の電磁弁である。出口弁2は、通常時に閉塞されているが、車輪がロックしそうになったときに制御装置52により開放されることで、各車輪ブレーキFL,RR,RL,FRの各キャリパC内に加わるブレーキ圧が各リザーバ3に逃がされ、各ブレーキ圧が減圧されるようになっている。また、この出口弁2と前記した入口弁1が、アンチロックブレーキ制御中において、ともに閉塞されることで、各ブレーキ圧が保持されるようになっている。
【0032】
チェック弁1aは、各入口弁1に並列に接続されている。このチェック弁1aは、各車輪ブレーキFL,RR,RL,FR側からマスタシリンダMC側へのブレーキ液の流入のみを許容する弁であり、ブレーキペダルBPからの入力が解除された場合に入口弁1を閉じた状態にしたときにおいても、各車輪ブレーキFL,RR,RL,FR側からマスタシリンダMC側へのブレーキ液の流入を許容する。
【0033】
リザーバ3は、各出口弁2が開放されることによって逃がされるブレーキ圧を吸収する機能を有している。
ポンプ4は、リザーバ3で吸収されているブレーキ液を吸入し、そのブレーキ液をダンパ5やオリフィス5aを介してマスタシリンダMCへ戻す機能を有している。これにより、リザーバ3によるブレーキ圧の吸収によって減圧された各出力液圧路91,92の圧力状態が回復される。
【0034】
図1に示すように、制御装置52は、例えば、CPU、RAM、ROMおよび入出力回路を備えており、前記した各センサ10,30,40の信号と、ROMに記憶されたプログラムやデータに基づいて各種演算処理を行うことによって、アンチロックブレーキ制御や、このアンチロックブレーキ制御中における左右の車輪T(以下、「左右輪T,T」ともいう。)のキャリパCに加わるブレーキ圧の差圧制御を実行する。
【0035】
以下に、制御装置52の機能のうち、前記した差圧制御を実行するための機能について図3〜図5を参照して詳細に説明する。
【0036】
図3に示すように、制御装置52は、許容差圧設定手段52A、目標制御圧設定手段52B、実減速度算出手段52C、目標減速度設定手段52D、高摩擦側ブレーキ圧制御手段52E、アンチロックブレーキ制御手段52Fおよび横加速度推定手段52Gを備えている。
【0037】
アンチロックブレーキ制御手段52Fは、各車輪Tのロックを防止する公知のアンチロックブレーキ制御を実行する機能を有している。具体的に、アンチロックブレーキ制御手段52Fは、各車輪速センサ10から送られてくる車輪速度に基づいてスリップ率を算出し、このスリップ率に応じて前述した入口弁1や出口弁2を制御している。そして、アンチロックブレーキ制御手段52Fは、アンチロックブレーキ制御(ブレーキ圧の減圧制御)を開始した際には、開始したことを示す開始信号を横加速度推定手段52Gに出力するように構成されている。
【0038】
横加速度推定手段52Gは、横加速度を左右の車輪速度差から公知の方法により推定する機能を有しており、アンチロックブレーキ制御が実行されている場合(横加速度を正確に推定できない場合)には、推定する横加速度が前回値よりも増大するのを禁止するように構成されている。具体的に、横加速度推定手段52Gは、アンチロックブレーキ制御手段52Fから開始信号を受信した際には、直前に推定した横加速度の値(前回値)を保持もしくは徐々に減算していくような処理を行っている。そして、横加速度推定手段52Gは、推定した横加速度を許容差圧設定手段52Aに出力するように構成されている。
【0039】
なお、横加速度の推定方法としては、例えば、特開2007−30748号公報に開示されている方法などを採用すればよい。
【0040】
許容差圧設定手段52Aは、車両の運動状態を示すパラメータに基づいて、同一車軸上の左右輪T,Tの許容差圧を設定する機能を有している。具体的に、許容差圧設定手段52Aは、候補算出手段A1、許容差圧選択手段A2および記憶手段A3を備えており、これらによって前側の左右輪T,Tの許容差圧および後側の左右輪T,Tの許容差圧を設定するように構成されている。なお、許容差圧の設定方法や、その後の制御方法は、前側の左右輪T,Tと後側の左右輪T,Tとで変わることはないので、以下の説明では、主に後側の左右輪T,Tを対象として説明することとする。
【0041】
候補算出手段A1は、記憶手段A3から図4(a)〜(c)に示す第1マップM1、第2マップM2および第3マップM3を取得する機能と、このように取得した各マップM1,M2,M3から許容差圧の第1候補、第2候補および第3候補を算出する機能(図5;ステップS1)とを主に有している。具体的に、候補算出手段A1は、各車輪速センサ10で検出した車輪速度に基づいて車体速度を算出し、この車体速度と第1マップM1(車体速度用マップ)に基づいて許容差圧の第1候補を算出する機能を有している。また、候補算出手段A1は、横加速度推定手段52Gから送られてくる横加速度と第2マップM2(横加速度用マップ)に基づいて許容差圧の第2候補を算出する機能を有している。さらに、候補算出手段A1は、各ブレーキ圧センサ40で検出した各ブレーキ圧のうち後側の左右輪(同軸輪)T,Tに対応した2つのブレーキ圧の中から低μ路側のブレーキ圧(以下、「低摩擦側ブレーキ圧」という。)を選択し、このように選択した低摩擦側ブレーキ圧と第3マップM3(ブレーキ圧用マップ)に基づいて許容差圧の第3候補を算出する機能を有している。
【0042】
ここで、低摩擦側ブレーキ圧を選択する方法としては、例えば、アンチロックブレーキ制御が先に開始された方の車輪Tのブレーキ圧を低摩擦側ブレーキ圧として選択する方法が挙げられる。また、車体速度は、車輪速度から算出せずに、例えば前後加速度センサで検出する車体の加速度に基づいて算出してもよい。
【0043】
そして、候補算出手段A1は、前記したように算出した許容差圧の各候補を許容差圧選択手段A2に出力するように構成されている。なお、候補算出手段A1で選択した低摩擦側ブレーキ圧は、許容差圧選択手段A2を介して目標制御圧設定手段52B(詳しくは、後記する加算手段B1)に出力されるとともに、低摩擦側ブレーキ圧の逆側のブレーキ圧(高摩擦側ブレーキ圧)は、許容差圧選択手段A2および加算手段B1を介して高摩擦側ブレーキ圧制御手段52Eに出力されるようになっている。
【0044】
許容差圧選択手段A2は、候補算出手段A1から送られてくる許容差圧の各候補のうちの最大のものを許容差圧として選択して設定する機能(図5;ステップS2)を有している。そして、許容差圧選択手段A2は、選択した許容差圧を目標制御圧設定手段52Bに出力するように構成されている。
【0045】
記憶手段A3は、前記したマップM1,M2,M3を記憶している。
【0046】
第1マップM1は、車体速度と許容差圧との関係を示すマップであり、この第1マップM1において、左右後輪の許容差圧は、すべての車体速度に対して0よりも大きな値γに設定されている。これにより、第1マップM1と車体速度から求めた左右後輪の許容差圧が常に0よりも大きな値γになっている。なお、本実施形態では、左右後輪の許容差圧が、車体速度に関わらず一定の値γに設定されているものとするが、値γは一定の値に限らず車体速度に応じて変化していてもよい。また、左右前輪の許容差圧は、車体速度がゼロであるときに最も高い許容差圧となり、そこから許容差圧は車体速度が上がるにつれて徐々に下がっていき、車体速度が所定値以上となると左右後輪の許容差圧よりも僅かに高い値に収束するように設定されている。
【0047】
第2マップM2は、横加速度と許容差圧との関係を示すマップであり、この第2マップM2では、横加速度が所定値以上となると、そこから徐々に許容差圧が上がっていくように設定されている。このように設定したのは、車両CRの旋回走行中においては、外輪に車重が大きくかかるため、外輪のブレーキ圧を上げると良好に制動力を得ることができるという理由からである。特に、左右後輪の許容差圧については、横加速度が0から所定値αまでの間で0(第1マップM1における左右後輪の許容差圧「γ(γが変化する場合にはγの最小値)」よりも小さい値)になり、所定値αを超えた後で徐々に大きくなるように設定されている。また、所定値αよりも大きな所定値βを越えた後は、第2マップM2の許容差圧は、第1マップM1の許容差圧「γ」よりも大きくなるように設定されている。これにより、横加速度が正確に算出されるときには、第2マップM2を用いて大きな差圧を左右後輪に発生させることが可能となっている。なお、第1マップM1の許容差圧「γ」が車体速度に応じて変化する構成とした場合には、第2マップM2において横加速度の所定値βは第1マップM1の許容差圧「γ」に応じて変動する値となる。
【0048】
第3マップM3は、低摩擦側ブレーキ圧と許容差圧との関係を示すマップであり、この第3マップM3では、低摩擦側ブレーキ圧が所定値以上となると、そこから徐々に許容差圧が上がっていくように設定されている。このように設定したのは、低摩擦側ブレーキ圧が高ければ、同一左右輪で路面係数が異なるスプリット路面とはならないと考えられるため、許容差圧を高めても問題ないばかりでなく、良好な制動力を得られるといった理由からである。なお、これらのマップM1,M2,M3は、実験やシミュレーションなどの結果に基づいて、前輪側および後輪側のそれぞれについて予め作成されている。
【0049】
また、マップM1,M2,M3において、前輪の許容差圧は、後輪の許容差圧よりも全体的に高くなっている。
【0050】
目標制御圧設定手段52Bは、加算手段B1、増圧分算出手段B2および偏差量算出手段B3を備えており、これらによって高μ路側のブレーキ圧(以下、「高摩擦側ブレーキ圧」という。)の目標値である目標制御圧を設定するように構成されている。なお、増圧分算出手段B2および偏差量算出手段B3の説明については、便宜上、後記する実減速度算出手段52Cおよび目標減速度設定手段52Dの説明の後に行うこととする。
【0051】
加算手段B1は、後で詳述する増圧分算出手段B2から信号が出力されてこないときには、許容差圧選択手段A2から出力されてくる2つの信号(許容差圧と低摩擦側ブレーキ圧)を足し合わせ、その値を目標制御圧として設定する機能を有している(図5;ステップS3)。また、この加算手段B1は、増圧分算出手段B2から信号が出力されてきた場合には、その信号(増圧分)を、前記した目標制御圧に足し合わせることで目標制御圧を上昇させ、その値を新目標制御圧として設定する機能も有している(図5;ステップS6)。そして、加算手段B1は、前記したように設定した目標制御圧または新目標制御圧を、高摩擦側ブレーキ圧制御手段52Eに出力するように構成されている。
【0052】
実減速度算出手段52Cは、左右輪T,Tの車輪速センサ10,10で検出した車輪速度のうち高摩擦側の車輪速度を選択し、この車輪速度に基づいて高摩擦側の実減速度(実際の減速度)を算出する機能を有している。そして、実減速度算出手段52Cは、算出した実減速度を目標制御圧設定手段52Bの偏差量算出手段B3に出力するように構成されている。
【0053】
目標減速度設定手段52Dは、ペダルセンサ30で検出したブレーキ圧(ブレーキペダルBPの踏み込み量に関連した情報)に基づいて、高摩擦側の車輪Tの目標減速度(ブレーキペダルBPの踏み込み量から安全率を見込んで最低限達成されるはずの減速度)を設定する機能を有している。そして、目標減速度設定手段52Dは、設定した目標減速度を目標制御圧設定手段52Bの偏差量算出手段B3に出力するように構成されている。
【0054】
偏差量算出手段B3は、実減速度算出手段52Cから送られてくる実減速度と、目標減速度設定手段52Dから送られてくる目標減速度との偏差量を算出する機能(図5;ステップS4)を有している。ここで、「偏差量」とは、目標減速度の絶対値から実減速度の絶対値を引いた値をいう。そして、偏差量算出手段B3は、算出した偏差量を増圧分算出手段B2に出力するように構成されている。
【0055】
増圧分算出手段B2は、偏差量算出手段B3で算出した偏差量に基づいて目標制御圧の増圧分を算出する機能、詳しくは偏差量に所定の係数を乗算することで増圧分を算出する機能(図5;ステップS5)を有している。そして、この増圧分算出手段B2は、算出した増圧分がゼロより大きいときのみ、その増圧分を加算手段B1に出力するように構成されている。ちなみに、偏差量算出手段B3と増圧分算出手段B2が作動する一例を挙げるとすると、運転者がブレーキペダルBPを踏んだときに、その踏み込み量であれば得られたはずのブレーキ力が得られずに、目標減速度と実減速度とが離れてしまった場合であっても、これらの偏差に基づいて算出された増圧分が目標制御圧に加算されることで、良好な制動力が得られるようになっている。
【0056】
高摩擦側ブレーキ圧制御手段52Eは、加算手段B1から出力される目標制御圧(または新目標制御圧;以下、新目標制御圧も含めて目標制御圧という)と、候補算出手段A1から許容差圧選択手段A2および加算手段B1を介して出力される高摩擦側ブレーキ圧とに基づいて、高摩擦側ブレーキ圧が目標制御圧に合うように、適宜、液圧ユニット51の入口弁1、出口弁2およびポンプ4(図2参照)等を制御する機能(図5;ステップS7)を有している。なお、この高摩擦側ブレーキ圧制御手段52Eは、アンチロックブレーキ制御の開始をきっかけにして作動する、すなわちアンチロックブレーキ制御手段52Fから制御開始を示す開始信号を受け取ったときに初めて、高摩擦側ブレーキ圧を目標制御圧に合うように制御するように構成されている。具体的には、この高摩擦側ブレーキ圧制御手段52Eは、図6に示す処理に従って制御を行うようになっている。
【0057】
以下に、図6を参照して、高摩擦側ブレーキ圧制御手段52Eの機能について詳細に説明する。
【0058】
高摩擦側ブレーキ圧制御手段52Eでは、まず、アンチロックブレーキ制御中であるか否かが判断され(ステップS71)、アンチロックブレーキ制御中でないと判断された場合には(No)、そのまま制御が終了する(END)。また、ステップS71において、アンチロックブレーキ制御中であると判断された場合には(Yes)、高摩擦側ブレーキ圧が目標制御圧を超えたか否かが判断される(ステップS72)。そして、ステップS72において高摩擦側ブレーキ圧が目標制御圧を超えたと判断された場合には(Yes)、高摩擦側ブレーキ圧が減圧閾値(目標制御圧に所定値を加算した値)を超えたか否かが判断される(ステップS73)。そして、高摩擦側ブレーキ圧が減圧閾値を超えている場合には(Yes)、高摩擦側ブレーキ圧が減圧され(ステップS74)、超えていない場合には(No)、高摩擦側ブレーキ圧が保持されて(ステップS75)、この制御が終了する(END)。
【0059】
また、ステップS72において、高摩擦側ブレーキ圧が目標制御圧を超えていないと判断された場合には(No)、高摩擦側ブレーキ圧が増圧された後(ステップS76)、制御が終了する(END)。ここで、増圧制御では、目標制御圧と現在の高摩擦側ブレーキ圧との偏差量が大きいほど、増圧速度を上げて目標制御圧に早く近づけるといった制御がなされている。
【0060】
なお、図6のフローが終了した後は、図5のフローに戻り、前記した各ステップS1〜S7が繰り返されることとなる(Return)。そして、この図5のフローは、アンチロックブレーキ制御が終了すると同時に終了するようになっている。
【0061】
次に、直進状態でブレーキをかけることによりアンチロックブレーキ制御が開始された後で車体を旋回させる場合における差圧制御(図5,6に示す制御)について説明する。すなわち、アンチロックブレーキ制御の開始により横加速度が正確に推定できなくなったときの差圧制御について説明する。
【0062】
直進状態で運転者がブレーキをかけた場合には、横加速度がほとんど車体にかかっていないので、第2マップM2から求められる許容差圧は0となる。また、アンチロックブレーキ制御が先に開始された車輪Tが低摩擦側と認定されることによって、低摩擦側ブレーキ圧の値が特定された後は、第3マップM3によって許容差圧が設定される。ここで、本実施形態では、説明の便宜上、低摩擦側ブレーキ圧はあまり高くないものとし、第3マップM3から求められる許容差圧が0であるものとして説明する。
【0063】
そして、第1マップM1では、すべての車体速度において0よりも大きな許容差圧が設定されているので、第1マップM1から求められる許容差圧は0よりも大きな値となる。したがって、各マップM1,M2,M3から求められる各許容差圧のうちの最大の許容差圧は、第1マップM1から求められる許容差圧となる。そして、これを横軸を時間としたグラフに示すと、図7(a)に示すように、本差圧制御中においては、第1マップM1と同様の一定の許容差圧(γ)に設定されることとなる。
【0064】
そして、このように許容差圧が差圧制御中に常に一定になることによって、図7(b)に示すように、路面状況等に応じて低摩擦側ブレーキ圧が経時変化した場合には、この低摩擦側ブレーキ圧に前記した許容差圧が加算されて導出される高摩擦側ブレーキ圧の目標制御圧は、図の二点鎖線で示すように低摩擦側ブレーキ圧に沿うようにして(低摩擦側ブレーキ圧をオフセットしたように)経時変化することとなる。さらに、この目標制御圧に所定値を加算することで設定される減圧閾値(目標制御圧に所定値を足した値)は、図の破線で示すように、目標制御圧に沿うようにして(目標制御圧をオフセットしたように)経時変化する。
【0065】
次に、高摩擦側ブレーキ圧の制御方法について図8を参照して説明する。
【0066】
図8に示すように、運転者がブレーキペダルBPを踏み込むと(時刻t1)、目標制御圧の算出が開始されるとともに、左右後輪のブレーキ圧は共に上昇していく(時刻t1〜t2)。そして、直進状態で運転者がブレーキをかけた後車体を旋回させると、車体が左右方向外側に傾くことにより左右方向内側の後輪(内輪)が先に滑って、アンチロックブレーキ制御が開始され、滑った内輪に加わるブレーキ圧(低摩擦側ブレーキ圧)が減圧される(時刻t2)。
【0067】
なお、この制御は、図5に示す基本フローにおいて、START→ステップS1〜S7→RETURNの流れで進行し、ステップS7において条件に応じた各種制御が行われるようになっている。ステップS7における制御(以下、単に「ブレーキ圧制御」という。)は、時刻t1〜t2の間においては、図6に示すように、START→ステップS71(No)→ENDの流れで進行する。また、時刻t2〜t3の間のブレーキ圧制御は、START→ステップS71(Yes)→ステップS72(No)→ステップS76→ENDの流れで進行する。ここで、時刻t2〜t3の間におけるステップS76(増圧制御)では、アンチロックブレーキ制御開始前(時刻t1)から既に開放されている入口弁1(図2参照)をそのまま開放させておくといった制御が行われ、結果的に高摩擦側ブレーキ圧(外輪)の増圧が行われるようになっている。
【0068】
そして、図8に戻って説明すると、時刻t3において、高摩擦側ブレーキ圧が目標制御圧を上回ると、高摩擦側ブレーキ圧の保持制御が行われ、時刻t4において、高摩擦側ブレーキ圧が減圧閾値を上回ると、高摩擦側ブレーキ圧の減圧制御が行われる。さらに、時刻t5において、高摩擦側ブレーキ圧が目標制御圧を下回ると、高摩擦側ブレーキ圧の増圧制御が行われる。
【0069】
なお、時刻t3〜t4の間の保持制御は、図6に示すように、START→ステップS71(Yes)→ステップS72(Yes)→ステップS73(No)→ステップS75→ENDの流れで進行する。また、時刻t4〜t5の間の減圧制御は、START→ステップS71(Yes)→ステップS72(Yes)→ステップS73(Yes)→ステップS74→ENDの流れで進行する。さらに、時刻t5〜t6の増圧制御は、START→ステップS71(Yes)→ステップS72(No)→ステップS76→ENDの流れで進行する。
【0070】
ちなみに、増圧制御では、前記したように目標制御圧と高摩擦側ブレーキ圧との偏差量が大きいほど増圧速度を上げているため、例えば時刻t7において偏差量が大きくなると増圧速度を上げて迅速に目標制御圧に到達させるようになっている。なお、本実施形態では、増圧速度が緩やかなものと急なものの2種類しか開示していないが、実際には、細かく増圧速度の持ち替えを行うのがよく、より好ましくは増圧速度の持ち替えはリニア(連続的)に行われるのがよい。
【0071】
なお、図8に示す目標制御圧は、図7(a)および(b)で示したように算出されたもの、すなわち高μ路側の車輪Tの実減速度と目標減速度の偏差量がゼロ以下である場合の目標制御圧を示したものである。ちなみに、実減速度と目標減速度の偏差量がゼロより大きくなる場合は、目標制御圧には、新たに増圧分が加算され、図7(b)とは異なるように経時変化する。そのため、この場合には、左右後輪の差圧をより大きくすることが可能となっている。
【0072】
以下に、実減速度と目標減速度の偏差量がゼロより大きくなった場合の目標制御圧の経時変化について述べる。
【0073】
図9(a)に示すように、ブレーキペダルBPの踏み込みにより、車輪速度が図で示すように経時変化したときにおいて、図9(b)に示すように、実減速度が図の実線で示すように経時変化し、目標減速度が図の二点鎖線で示すように経時変化したとする。この場合、前記した偏差量算出手段B3で実減速度と目標減速度の偏差量(減速度差)が随時算出されることによって、その偏差量は、図9(c)に示すように経時変化する。ここで、図9(b)に示す縦軸〔減速度〕は、下向きを正としており、図9(c)に示す縦軸〔減速度差〕は、上向きを正としている。つまり、図9(b)の経時変化の前半については、実減速度が目標減速度まで到達しておらず、到達するには偏差量に相当するブレーキ力が必要な状態(不足した状態)となっており、後半については、実減速度が目標減速度を超えているためブレーキ力は十分足りている状態となっている。そのため、図9(c)は、偏差量(減速度差)が正である場合はブレーキ力が不足していることを示し、負である場合はブレーキ力が十分足りていることを示している。
【0074】
そして、前記したように偏差量が経時変化する場合、偏差量算出手段B3は、その偏差量がゼロより大きい場合にのみ、その偏差量を前記した増圧分算出手段B2に出力することから、図10(a)および(b)に示すように、増圧分算出手段B2で算出される増圧分は、正の偏差量に対応した範囲において経時変化し、負の偏差量に対応した範囲においてはゼロとなる。そのため、この増圧分が前記した加算手段B1によって目標制御圧に加算されると、図10(c)に示すように、目標制御圧の前半は、増圧分だけ持ち上げられて経時変化する。
【0075】
以上によれば、本実施形態において、次のような効果を得ることができる。
車体速度から求めた左右後輪の許容差圧が常に0よりも大きな値γとなるので、横加速度の推定が困難な場合であっても、旋回時に左右後輪に差圧を持たせることができ、旋回外輪の制動力を効率よく発揮させることができる。
【0076】
アンチロックブレーキ制御が実行されている場合には、推定した横加速度が前回値よりも増大するのが禁止されるので、直進時にアンチロックブレーキ制御が開始された後、車体が旋回する場合には、横加速度が0付近の値でそれ以上増大することがない。そこで、第2マップM2から求められる許容差圧よりも第1マップM1から求められる許容差圧を大きな値γに設定することで、この際の許容差圧は、第1マップM1の許容差圧に設定される。したがって、アンチロックブレーキ制御が実行されて横加速度が正確に推定できない場合には、第1マップM1の許容差圧で左右後輪の差圧が許容されるので、横加速度の推定が困難な場合であっても旋回外輪の制動力を効率よく発揮させることができる。
【0077】
また、アンチロックブレーキ制御が実行されていない場合には、正確に横加速度が推定されるので、正確な横加速度から求められる第2マップM2の許容差圧を含めた複数の候補の中から最適な許容差圧を決めて、旋回などに適した良好な制御を行うことができる。特に、横加速度が所定値β以上のときには、第1マップM1よりも大きな許容差圧を第2マップM2から選ぶことができ、旋回外輪の制動力をより高くすることができる。
【0078】
車両の運動状態を示す車体速度、横加速度および低摩擦側ブレーキ圧のそれぞれに対応した許容差圧のうちの最大値に基づいて、高摩擦側ブレーキ圧が制御されるので、そのときの車両の運動状態に適した最大の制動力を得ることができる。
【0079】
各マップM1,M2,M3から許容差圧を導出するように構成したので、例えば各マップM1,M2,M3を、様々な車種に対応した実験やシミュレーションなどから作成しておけば、各車種に対応した正確なブレーキ圧の制御を実現することが可能となる。
【0080】
実減速度が目標減速度よりも不足する場合には、実減速度と目標減速度との偏差量に基づいて算出された増圧分だけ目標制御圧が上昇されるので、正確に算出された増圧分によって最適な制動力を得ることができる。
【0081】
以上、本発明は、前記実施形態に限定されることなく、様々な形態で実施される。
本実施形態では、車両の運動状態を示すパラメータを3つとしたが、パラメータはいくつであってもよく、車体速度を取得または推定するためのパラメータを有していれば、他は適宜選択できる。また、「車両の運動状態を示すパラメータ(許容差圧に影響のあるパラメータ)」としては、本実施形態で挙げたものの他に、例えば、車輪速度、ヨーレイト、車体加速度などであってもよい。
【0082】
本実施形態では、目標制御圧の増圧分を偏差量に基づいて算出したが、本発明はこれに限定されず、例えば偏差量に関係なく単純に増圧分を所定値に固定させてもよい。
本実施形態では、目標制御圧に増圧分を加算したが、本発明はこれに限定されず、許容差圧設定手段52A(許容差圧選択手段A2)において選択した許容差圧に増圧分を加算してもよい。
【0083】
本実施形態では、ブレーキ圧センサによって実際のブレーキ圧を検出したが、本発明はこれに限定されず、他のパラメータからブレーキ圧を推定してもよい。
また、横加速度も、横加速度センサで検出してもよい。この場合であっても、横加速度センサが故障した場合には、本発明を有効に活用することができる。
【0084】
前記実施形態では、各マップM1〜M3から許容差圧を求めたが、本発明はこれに限定されず、計算式などから許容差圧を求めてもよい。また、複数のマップを用いずに、1つのマップ(第1マップM1)のみを用いて許容差圧を求めてもよい。
【0085】
また、許容差圧設定手段は、次に説明するように、アンチロックブレーキ制御を開始する際の車輪速度から現在の車輪速度までの速度変化量が所定値を越えるまでは、左右後輪の許容差圧を0に保つように構成されていてもよい。具体的には、制御装置を、図11に示すような形態としてもよい。なお、以下に図11の形態について説明するが、この形態は、前記実施形態(図3参照)の一部を変更したものなので、前記実施形態と同様の構成要素についてはその説明は省略することとする。
【0086】
図11に示すように、制御装置52’は、前記実施形態とは多少異なるアンチロックブレーキ制御手段52F’、許容差圧設定手段52A’および目標制御圧設定手段52B’を備えている。
【0087】
アンチロックブレーキ制御手段52F’は、アンチロックブレーキ制御の開始を示す開始信号を速度変化量算出手段A4にも出力するように構成されている。
【0088】
許容差圧設定手段52A’は、許容差圧選択手段A2’と、速度変化量算出手段A4と、制限許容差圧設定手段A5と、差圧制限値設定手段A6とを新たに備えている。
【0089】
許容差圧選択手段A2’は、前記実施形態と同じ方法で選択した許容差圧を差圧制限値設定手段A6に出力するように構成されている。
【0090】
速度変化量算出手段A4は、高摩擦側の車輪速度の変化に応じて車輪速度の速度変化量を算出する機能(図12;ステップS2A)を有している。具体的には、アンチロックブレーキ制御手段52F’から開始信号を受け取ったときに、高摩擦側の車輪速度を基準速度として保持設定し、この基準速度に対する高摩擦側の車輪速度の変化(偏差量)を速度変化量として算出するようになっている。ここで、「速度変化量」とは、基準速度から現在の高摩擦側の車輪速度を引いた値をいい、図13(a)に示すように、時間の経過に応じて基準速度に対して現在の車輪速度が徐々に低下することによって、速度変化量は時間の経過に応じて徐々に大きくなっている。そして、速度変化量算出手段A4は、算出した速度変化量を制限許容差圧設定手段A5に出力するように構成されている。
【0091】
制限許容差圧設定手段A5は、速度変化量算出手段A4で算出した速度変化量に基づいて許容差圧(以下、制限許容差圧設定手段A5で算出された許容差圧を制限許容差圧とも呼ぶ。)を算出する機能(図12;ステップS2B)を有している。詳しくは、制限許容差圧設定手段A5は、記憶手段A3に記憶された図14に示す第4マップM4を参照することで制限許容差圧を算出する機能を有している。
【0092】
具体的に、第4マップM4(速度変化量用マップ)は、速度変化量が0から所定値ΔV1までの間において左右後輪の制限許容差圧が0であり、速度変化量が所定値ΔV1を超えた後は制限許容差圧が徐々に上昇するように設定されている。さらに、速度変化量が、所定値ΔV1よりも大きな所定値ΔV2を越えた後は、第1マップM1の許容差圧γよりも大きな一定の値に維持されるように設定されている(図13(b)参照)。そして、制限許容差圧設定手段A5は、算出した制限許容差圧を差圧制限値設定手段A6に出力するように構成されている。
【0093】
差圧制限値設定手段A6は、許容差圧選択手段A2’から送られてくる許容差圧と、制限許容差圧設定手段A5から送られてくる制限許容差圧とを比較し、これらに差がある場合には、これらのうち低い方を差圧制限値(後の制御で利用する許容差圧)として設定し、差がない場合(同じ値である場合)には、これらのうちいずれか一方を差圧制限値として設定する機能(図12;ステップS2C)を有している。具体的には、図13(b)に示すように、アンチロックブレーキ制御の開始時には、制限許容差圧がゼロに設定されて許容差圧よりも低くなるので、制限許容差圧が差圧制限値に設定される。また、アンチロックブレーキ制御が進行するにつれて制限許容差圧が大きくなって許容差圧を上回ると、低い方である許容差圧が差圧制限値として設定される。つまり、アンチロックブレーキ制御の開始時には、制限許容差圧が許容差圧とみなされて差圧制限値に設定され、ブレーキ圧の制御が進行するにつれて制限許容差圧が許容差圧を上回ると、制限許容差圧から許容差圧に戻されて許容差圧が差圧制限値に設定されることとなる。そして、差圧制限値設定手段A6は、設定した差圧制限値を目標制御圧設定手段52B’の加算手段B1’に出力するように構成されている。
【0094】
加算手段B1’は、増圧分算出手段B2から信号が出力されてこないときは、差圧制限値設定手段A6から出力されてくる差圧制限値に、許容差圧設定手段52A’から出力されてくる低摩擦側ブレーキ圧を足し合わせ、その値を目標制御圧として設定する機能(図12;ステップS3’)を有している。また、この加算手段B1’は、増圧分算出手段B2から信号が出力されてきた場合には、その信号(増圧分)を、前記した目標制御圧に足し合わせることで目標制御圧を上昇させ、その値を新目標制御圧として設定する機能も有している(図12;ステップS6)。
【0095】
次に、図11の実施形態に係る制御装置52’の動作について簡単に説明する。
図12に示すように、制御装置52’の動作は基本的には、前記実施形態(図5)と同様であるが、新たにステップS2A、S2B、S2Cを加えた点と、ステップS3’として前記実施形態と異なる手法で高摩擦側ブレーキ圧の目標制御圧を設定するようにした点で異なっている。そのため、以下の説明では、前記実施形態に比べて特に異なる動作となるステップS2A〜S3’のみを説明する。
【0096】
ステップS2Aでは、速度変化量算出手段A4によって、高摩擦側の車輪速度の変化に応じた車輪速度の速度変化量が算出される。また、ステップS2Bでは、制限許容差圧設定手段A5によって、速度変化量算出手段A4で算出した速度変化量と第4マップM4に基づいて制限許容差圧が算出される。そして、ステップS2Cでは、許容差圧選択手段A2’から送られてくる許容差圧と、制限許容差圧設定手段A5から送られてくる制限許容差圧とのうち低い方が差圧制限値として設定される。その後、ステップS3’では、加算手段B1’によって、ステップS2Cで設定された差圧制限値に低摩擦側ブレーキ圧が足し合わされ、その値が目標制御圧として設定される。
【0097】
具体的には、例えば、直進状態でブレーキをかけることでアンチロックブレーキ制御が開始された後で車体を旋回させる場合には、前記実施形態と同様に、各マップM1〜M3のうち第1マップM1から左右後輪の許容差圧が選択される。そして、これを横軸を時間としたグラフに示すと、図13(b)に破線で示すように、第1マップM1の許容差圧は時間の経過に関わらず常に一定の値に維持される。
【0098】
一方、図14に示す第4マップM4から求められる左右後輪の制限許容差圧は、速度変化量が時間の経過に伴って徐々に大きくなることにより、図13(b)に2点鎖線で示すように、時間の経過に伴って第4マップM4と略同じ傾向で変化する。
【0099】
そのため、差圧制限値は、図13(b)に実線で示すように、アンチロックブレーキ制御の前半においては制限許容差圧の値となり、後半においては許容差圧の値となる。具体的には、アンチロックブレーキ制御の初期においては、差圧制限値は0に維持され、その後徐々に上がっていき、後期においては許容差圧γに維持されるようになっている。すなわち、時刻t8において、差圧制限値を求めるためのマップが、第4マップM4から第1マップM1に切り替わるようになっている。
【0100】
そして、このように決定された差圧制限値が低摩擦側ブレーキ圧に加算されることで、図13(c)に示すように、目標制御圧や減圧閾値が決定される。
【0101】
以上、図11に示す形態によれば、アンチロックブレーキ制御の初期において左右後輪の許容差圧(差圧制限値)を0に維持することができる。そのため、例えばスプリット路の直進時にアンチロックブレーキ制御が実行される場合において、左右後輪の許容差圧を0に維持することができるので、車両の安定性を向上させることができる。
【0102】
また、第4マップM4が、速度変化量が0から所定値ΔV1までの間において左右後輪の制限許容差圧が0であり、速度変化量が所定値ΔV1を超えた後は制限許容差圧が徐々に上昇するように設定されているので、徐々に上昇する区間を使って第4マップM4から他のマップにスムーズに移行することができる。そのため、許容差圧が0からいきなり大きな値に飛んでしまうのを防止することができるので、許容差圧の大きな変動を抑えて、車両の安定性を向上させることができる。
【0103】
さらに、速度変化量算出手段A4によって、車輪速度の速度変化量は、車輪スリップの小さい高摩擦側の車輪速度の変化に応じて算出されるので、速度変化量の算出が適切に行われるようになり、その結果、速度変化量に対応する制限許容差圧が適切に設定されるようになる。したがって、左右のブレーキ圧の差が大きくなりすぎるのをより確実に抑制することができる。
【符号の説明】
【0104】
10 車輪速センサ
50 車両用ブレーキ圧制御装置
51 液圧ユニット
52 制御装置
52A 許容差圧設定手段
52B 目標制御圧設定手段
52E 高摩擦側ブレーキ圧制御手段
52F アンチロックブレーキ制御手段
52G 横加速度推定手段
CR 車両
M1 第1マップ
M2 第2マップ
M4 第4マップ
T 車輪
【特許請求の範囲】
【請求項1】
車両の運動状態を示すパラメータに基づいて同一車軸上の左右輪の許容差圧を設定する許容差圧設定手段と、前記許容差圧設定手段で設定した前記許容差圧と左右輪のうちの低摩擦側の車輪に加わる低摩擦側ブレーキ圧とを足し合わせた値を高摩擦側の車輪に加わる高摩擦側ブレーキ圧の目標制御圧として設定する目標制御圧設定手段と、前記高摩擦側ブレーキ圧を前記目標制御圧に基づいて制御する高摩擦側ブレーキ圧制御手段と、を備えた車両用ブレーキ圧制御装置であって、
前記許容差圧設定手段は、車体速度に基づいて左右後輪の許容差圧を求めるように構成され、車体速度から求めた左右後輪の許容差圧が常に0よりも大きな値になるように構成されていることを特徴とする車両用ブレーキ圧制御装置。
【請求項2】
車輪のロックを防止するアンチロックブレーキ制御を実行するアンチロックブレーキ制御手段と、
横加速度を左右の車輪速度差から推定する横加速度推定手段と、をさらに備え、
前記許容差圧設定手段は、
推定した横加速度に基づいて左右後輪の許容差圧を求めるように構成され、
前記車体速度から求めた許容差圧を第1候補とするとともに、前記横加速度から求めた許容差圧を第2候補とし、少なくとも前記第1候補および前記第2候補を含む複数の候補のうち最大のものを前記目標制御圧設定手段で用いる許容差圧として決定し、
前記横加速度推定手段は、
前記アンチロックブレーキ制御が実行されている場合には、推定した横加速度が前回値よりも増大するのを禁止するように構成され、
前記第1候補の許容差圧は、横加速度が0から所定値までの間において求められる第2候補の許容差圧よりも大きな値に設定されていることを特徴とする請求項1に記載の車両用ブレーキ圧制御装置。
【請求項3】
前記許容差圧設定手段は、
前記アンチロックブレーキ制御を開始する際の車輪速度から現在の車輪速度までの速度変化量が所定値を越えるまでは、左右後輪の許容差圧を0に保つように構成されていることを特徴とする請求項1または請求項2に記載の車両用ブレーキ圧制御装置。
【請求項1】
車両の運動状態を示すパラメータに基づいて同一車軸上の左右輪の許容差圧を設定する許容差圧設定手段と、前記許容差圧設定手段で設定した前記許容差圧と左右輪のうちの低摩擦側の車輪に加わる低摩擦側ブレーキ圧とを足し合わせた値を高摩擦側の車輪に加わる高摩擦側ブレーキ圧の目標制御圧として設定する目標制御圧設定手段と、前記高摩擦側ブレーキ圧を前記目標制御圧に基づいて制御する高摩擦側ブレーキ圧制御手段と、を備えた車両用ブレーキ圧制御装置であって、
前記許容差圧設定手段は、車体速度に基づいて左右後輪の許容差圧を求めるように構成され、車体速度から求めた左右後輪の許容差圧が常に0よりも大きな値になるように構成されていることを特徴とする車両用ブレーキ圧制御装置。
【請求項2】
車輪のロックを防止するアンチロックブレーキ制御を実行するアンチロックブレーキ制御手段と、
横加速度を左右の車輪速度差から推定する横加速度推定手段と、をさらに備え、
前記許容差圧設定手段は、
推定した横加速度に基づいて左右後輪の許容差圧を求めるように構成され、
前記車体速度から求めた許容差圧を第1候補とするとともに、前記横加速度から求めた許容差圧を第2候補とし、少なくとも前記第1候補および前記第2候補を含む複数の候補のうち最大のものを前記目標制御圧設定手段で用いる許容差圧として決定し、
前記横加速度推定手段は、
前記アンチロックブレーキ制御が実行されている場合には、推定した横加速度が前回値よりも増大するのを禁止するように構成され、
前記第1候補の許容差圧は、横加速度が0から所定値までの間において求められる第2候補の許容差圧よりも大きな値に設定されていることを特徴とする請求項1に記載の車両用ブレーキ圧制御装置。
【請求項3】
前記許容差圧設定手段は、
前記アンチロックブレーキ制御を開始する際の車輪速度から現在の車輪速度までの速度変化量が所定値を越えるまでは、左右後輪の許容差圧を0に保つように構成されていることを特徴とする請求項1または請求項2に記載の車両用ブレーキ圧制御装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】

【図12】

【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2011−79465(P2011−79465A)
【公開日】平成23年4月21日(2011.4.21)
【国際特許分類】
【出願番号】特願2009−234535(P2009−234535)
【出願日】平成21年10月8日(2009.10.8)
【出願人】(000226677)日信工業株式会社 (840)
【Fターム(参考)】
【公開日】平成23年4月21日(2011.4.21)
【国際特許分類】
【出願日】平成21年10月8日(2009.10.8)
【出願人】(000226677)日信工業株式会社 (840)
【Fターム(参考)】
[ Back to top ]