
車両用ブレーキ液圧制御装置
【課題】車輪が継続して振動する場合に、減圧量の大小に拘わらず増圧補正をすること。
【解決手段】サイクル時間が第1の所定時間以内であるか否かを判定する第1サイクル時間判定手段と、車輪加速度が所定値以上であるか否かを判定する車輪加速度判定手段と、第1サイクル時間判定手段でサイクル時間が第1の所定時間以内であると判定され、且つ、車輪加速度判定手段で車輪加速度が所定値以上であると判定されたことを条件として、今回の増圧制御の開始時点におけるブレーキ液圧と目標ブレーキ液圧との差に基づいて補正増圧レート及び補正時間を決定する補正変数決定手段28と、前記決定された補正時間及び補正増圧レートで補正する補正手段29とを備える。
【解決手段】サイクル時間が第1の所定時間以内であるか否かを判定する第1サイクル時間判定手段と、車輪加速度が所定値以上であるか否かを判定する車輪加速度判定手段と、第1サイクル時間判定手段でサイクル時間が第1の所定時間以内であると判定され、且つ、車輪加速度判定手段で車輪加速度が所定値以上であると判定されたことを条件として、今回の増圧制御の開始時点におけるブレーキ液圧と目標ブレーキ液圧との差に基づいて補正増圧レート及び補正時間を決定する補正変数決定手段28と、前記決定された補正時間及び補正増圧レートで補正する補正手段29とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用ブレーキ液圧制御装置に関し、一層詳細には、アンチロックブレーキ制御を実行可能な車両用ブレーキ液圧制御装置に関する。
【背景技術】
【0002】
従来から、車輪ブレーキによる制動力を制御することが可能な車両用ブレーキ液圧制御装置が知られている。この車両用ブレーキ液圧制御装置では、例えば、車輪がロックしそうになったと判断されたとき、車輪ブレーキのキャリパ圧を減圧して車輪のロックを防止する、いわゆるアンチロックブレーキ制御(ABS制御)がなされている。
【0003】
この種の車両用ブレーキ液圧制御装置として、例えば、特許文献1には、単発の段差等によって車輪がロックしそうになり減圧量の大きな減圧制御を行う状況において、前記減圧量に基づいてキャリパ圧の増圧レートを補正し、迅速にブレーキ液圧を復帰させることが可能な車両用ブレーキ液圧制御装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−23465号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、路面に、単発ではなく、複数の連続する段差があったり、路面がうねっていたり、路面が悪路であったり、又は、インギアによる駆動系の振動が発生することで、車輪が継続して振動する場合がある。
【0006】
このように車輪が継続して振動する場合には、特に、2回目以降の減圧制御時に減圧量が大きくなりにくいため(1回目と比較して減圧量がより小さくなるため)、このような状況においてもブレーキ液圧を迅速に復帰させるための、更なる改良が希求されている。
【0007】
本発明は、前記の点に鑑みてなされたものであり、例えば、車輪が継続して振動する場合に、減圧量の大小に拘わらず増圧補正をすることが可能な車両用ブレーキ液圧制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
前記の目的を達成するために、本発明は、液圧源と車輪ブレーキとの間に介装される常開型比例電磁弁と、車輪ブレーキ内のブレーキ液圧を逃がす常閉型電磁弁と、前記常開型比例電磁弁及び前記常閉型電磁弁を制御して前記車輪ブレーキ内のブレーキ液圧の増圧制御、保持制御又は減圧制御を行う制御手段と、を有する車両用ブレーキ液圧制御装置であって、前記制御手段は、前記増圧制御中、前記ブレーキ液圧が所定の増圧レートで増圧されるように前記常開型比例電磁弁の開弁量を制御する開弁量制御手段と、前回の増圧制御の開始時点から今回の増圧制御の開始時点までのサイクル時間が第1の所定時間以内であるか否かを判定する第1サイクル時間判定手段と、前記減圧制御の開始時点から次回の増圧制御の開始時点までの時間のうち少なくとも車輪速度が増加傾向となる時間内の車輪加速度を取得し、前記車輪加速度が所定値以上であるか否かを判定する車輪加速度判定手段と、前記車輪ブレーキ内のブレーキ液圧を取得するブレーキ液圧取得手段と、前記車輪ブレーキ内の目標ブレーキ液圧を算出する目標ブレーキ液圧算出手段と、前記第1サイクル時間判定手段で前記サイクル時間が前記第1の所定時間以内であると判定され、且つ、前記車輪加速度判定手段で前記車輪加速度が所定値以上であると判定されたことを条件として、前記ブレーキ液圧取得手段により取得された今回の増圧制御の開始時点におけるブレーキ液圧と前記目標ブレーキ液圧との差に基づいて補正増圧レート及び補正時間を決定する補正変数決定手段と、前記補正時間の間、前記開弁量を、前記車輪ブレーキ内のブレーキ液圧が前記補正増圧レートで増圧されるように補正する補正手段と、を備えることを特徴とする。
【0009】
サイクル時間(前回の増圧制御の開始時点から今回の増圧制御の開始時点までの時間)が第1の所定時間以内のときは、路面に連続する複数の段差があったり、路面がうねっていたり、悪路であったり、インギアによる駆動系の振動が発生していたりすることで、減圧制御が短時間だけ行われる車輪振動状態と推定される。また、ロック傾向にあった車輪の車輪加速度が所定値以上のときには、車輪の振動が収まり、車輪速度が車体速度に急速に復帰している(車輪が路面と接触し、車輪速度が車体速度に追従している)と推定される。本発明によれば、このように推定されたときに補正手段が補正時間内において補正増圧レートで補正することで、減圧量の大小に拘わらずブレーキ液圧を迅速に復帰させることができる。なお、ブレーキ液圧取得手段が取得するブレーキ液圧は、車輪ブレーキ内の液圧センサにより計測された実際のブレーキ液圧であってもよいし、又は、推定された推定ブレーキ液圧のいずれであってもよい。
【0010】
また、本発明は、前記制御手段が、前回の増圧制御の開始時点から今回の増圧制御の開始時点までのサイクル時間が第2の所定時間以内であるか否かを判定する第2サイクル時間判定手段を備え、前記目標ブレーキ液圧算出手段は、前回の減圧制御の開始時点において前記ブレーキ液圧取得手段により取得されたブレーキ液圧に基づいて基本目標ブレーキ液圧を算出する基本目標ブレーキ液圧算出手段と、前記目標ブレーキ液圧の前回値を所定量だけオフセットさせた補正目標ブレーキ液圧を算出する補正目標ブレーキ液圧算出手段と、を有し、前記第2サイクル時間判定手段で前記サイクル時間が第2の所定時間以内であると判定された場合には、前記基本目標ブレーキ液圧に代えて、前記補正目標ブレーキ液圧を前記目標ブレーキ液圧とすることを特徴とする。
【0011】
このような構成によれば、サイクル時間が第2の所定時間以内のときには車輪振動状態にあると推定し、前回の減圧制御の開始時点のブレーキ液圧(ロック液圧)ではなく、目標ブレーキ液圧の前回値を所定量だけオフセットさせた補正目標ブレーキ液圧に基づいて目標ブレーキ液圧を算出することにより、目標ブレーキ液圧を小さくなりすぎないようにすることができる。このため、ブレーキ液圧と目標ブレーキ液圧との差(差分)を有効に利用して補正することができる。なお、第2の所定時間は、前記第1の所定時間と同一値であってもよいし、又は、異なる値であってもよい。また、オフセットは、前回の目標ブレーキ液圧値から所定量だけ下げる補正をいう。
【0012】
さらに、本発明は、前記補正変数決定手段が、前記ブレーキ液圧取得手段により取得されたブレーキ液圧と前記目標ブレーキ液圧との差が前記補正時間内に0又は0に近づくように、前記補正増圧レート及び前記補正時間を決定することを特徴とする。
【0013】
このような構成によれば、補正時間中に補正増圧レートで増圧制御されることで発生する増圧量が目標ブレーキ液圧に到達するように、補正増圧レート及び補正時間を決定(設定)することができる。この結果、補正増圧レート及び補正時間を、車両用ブレーキ液圧制御装置の増圧特性や車両環境等によって適宜バランスさせることができる。
【0014】
さらにまた、本発明は、前記補正変数決定手段が、前記ブレーキ液圧取得手段により取得されたブレーキ液圧と前記目標ブレーキ液圧との差が大きいほど前記補正増圧レートが大きくなるように前記補正増圧レートを決定することを特徴とする。
【0015】
このような構成によれば、ブレーキ液圧と目標ブレーキ液圧との差が大きいほど補正増圧レートを大きく設定することができるため、ブレーキ液圧と目標ブレーキ液圧との差が大きい場合でも、ブレーキ液圧を迅速に復帰させることができる。
【0016】
またさらに、本発明は、前記補正変数決定手段が、前記ブレーキ液圧取得手段により取得されたブレーキ液圧と前記目標ブレーキ液圧との差に拘わらず、前記補正時間を一定の時間に決定することを特徴とする。
【0017】
このような構成によれば、補正時間を変更しないで補正増圧レートのみによる補正でブレーキ液圧を可変させることにより、ブレーキ液圧を迅速に復帰させることができると共に、補正増圧レートの設定を簡便に遂行することができる。
【0018】
またさらに、本発明は、前記補正手段が、前記所定の増圧レートよりも前記補正増圧レートの方が大きい場合にのみ、前記補正を行うことを特徴とする。
【0019】
このような構成によれば、所定の増圧レートが補正増圧レートよりも大きい場合には、補正増圧レートを用いることがないため、補正増圧レートによってブレーキ液圧を迅速に復帰させることができる場合にのみ、本補正を適用することができる。
【発明の効果】
【0020】
本発明によれば、例えば、車輪が継続して振動する場合に、減圧量の大小に拘わらず増圧補正をすることが可能な車両用ブレーキ液圧制御装置を得ることができる。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態に係る車両用ブレーキ液圧制御装置が組み込まれた車両の構成図である。
【図2】前記車両用ブレーキ液圧制御装置の概略構成図である。
【図3】制御部の概略構成ブロック図である。
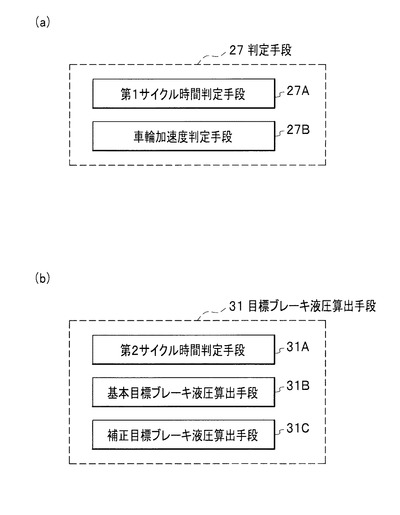
【図4】(a)は、判定手段の構成ブロック図、(b)は、目標ブレーキ液圧算出手段の構成ブロック図である。
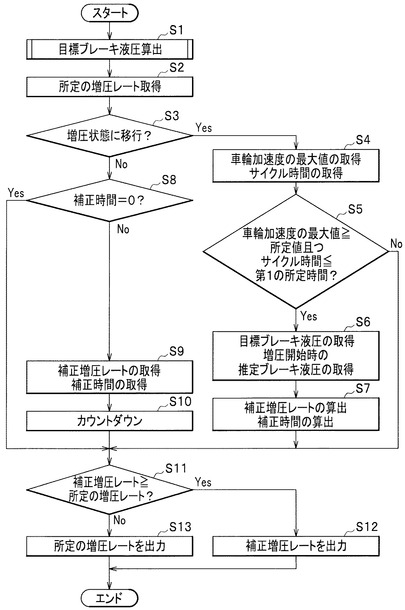
【図5】制御部における制御処理の流れの一例を示すフローチャートである。
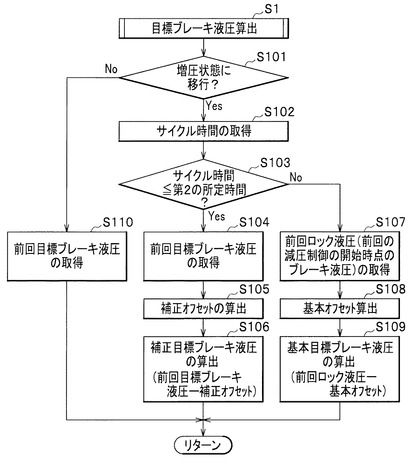
【図6】図5における目標ブレーキ液圧算出ステップのサブルーチンフローチャートである。
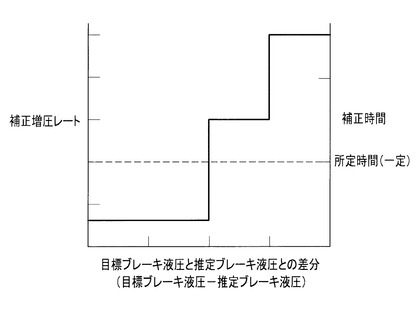
【図7】目標ブレーキ液圧と推定ブレーキ液圧との差分と、補正増圧レートとの関係を示す特性図である。
【図8】制御モードの切り換えの一例を示す説明図である。
【図9】例えば、路面に連続する複数の段差があったときの車輪速度と車体速度との関係を示す特性図である。
【図10】図9の状態において、車輪加速度とサイクル時間と制御モードと推定ブレーキ液圧と目標ブレーキ液圧と増圧レートと減圧量との関係を示すタイムチャートである。
【発明を実施するための形態】
【0022】
本発明の実施形態について、適宜図面を参照しながら詳細に説明する。図1は、本発明の実施形態に係る車両用ブレーキ液圧制御装置が組み込まれた車両の構成図、図2は、前記車両用ブレーキ液圧制御装置の概略構成図である。
【0023】
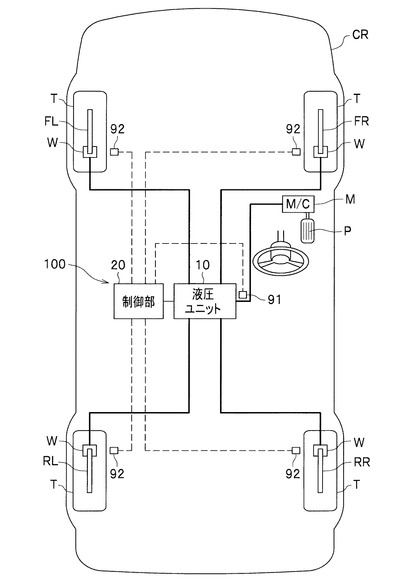
図1に示すように、車両用ブレーキ液圧制御装置100は、車両CRの各車輪Tに付与される制動力(ブレーキ力)を適宜制御することが可能な装置である。この車両用ブレーキ液圧制御装置100は、基本的に、油路や各種部品が設けられる液圧ユニット10と、前記液圧ユニット10内の各種部品を適宜制御するための制御部(制御手段)20とによって構成されている。
【0024】
各車輪Tには、それぞれ車輪ブレーキFL、RR、RL、FRが設けられる。各車輪ブレーキFL、RR、RL、FRには、液圧源として機能するマスタシリンダMから供給される液圧により制動力を発生するホイールシリンダWが設けられている。前記マスタシリンダMとホイールシリンダWとは、それぞれ液圧ユニット10に接続されている。操作者によるブレーキペダルPの踏力に応じてマスタシリンダMで発生したブレーキ液圧は、制御部20及び液圧ユニット10で制御された後、ホイールシリンダWに供給される。
【0025】
制御部20には、マスタシリンダM内の液圧を検出する圧力センサ91と、各車輪Tの車輪速度を検出する車輪速センサ92とが接続されている。この制御部20は、例えば、図示しないCPU、RAM、ROM及び入出力回路等を備えており、圧力センサ91及び車輪速センサ92からの検出信号と、ROMに予め記憶されたプログラムやデータに基づいて各種演算処理を行うことによって、制御を実行する。なお、制御部20の詳細は、後記で説明する(図3参照)。
【0026】
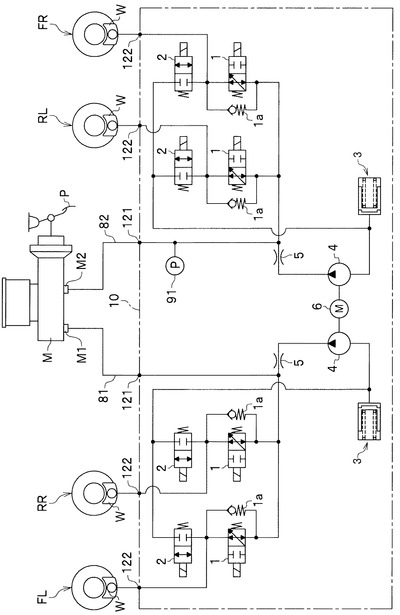
図2に示すように、液圧ユニット10は、マスタシリンダMと車輪ブレーキFL、RR、RL、FRとの間に配置される。マスタシリンダMの一対の出力ポートM1、M2は、液圧ユニット10の入口ポート121に接続される。前記液圧ユニット10の出口ポート122は、各車輪ブレーキFL、RR、RL、FRに接続される。通常時には、液圧ユニット10内の入口ポート121から出口ポート122までが連通状態となり、ブレーキペダルPの踏力が各車輪ブレーキFL、RR、RL、FRに伝達されるようになっている。
【0027】
液圧ユニット10には、各車輪ブレーキFL、RR、RL、FRに対応して、4つの入口弁1、4つの出口弁2、及び、4つのチェック弁1aが設けられている。また、出力ポートM1、M2に対応して、2つの出力液圧路81、82、2つのリザーバ3、2つのポンプ4、2つのオリフィス5がそれぞれ設けられている。なお、2つのモータポンプ4をそれぞれ駆動するための電動モータ6が設けられている。
【0028】
入口弁1は、各車輪ブレーキFL、RR、RL、FRとマスタシリンダMとの間(各車輪ブレーキFL、RR、RL、FRの上流側)に配置された常開型比例電磁弁(ノーマルオープンタイプのリニアソレノイドバルブ)で構成される。入口弁1は、制御部20からの通電量によって、バルブ本体内に設けられた弁体の開弁量(リフト量)が調整可能に設けられている。入口弁1は、通常時に弁開状態となっていることで、マスタシリンダMから各車輪ブレーキFL、RR、RL、FRへブレーキ液圧が伝達されるのを許容している。
【0029】
また、入口弁1は、車輪Tがロックしそうになったときに制御部20により弁閉状態に切り換えられることで、ブレーキペダルPから各車輪ブレーキFL、RR、RL、FRへのブレーキ液圧の伝達が遮断される。さらに、入口弁1は、制御部20によって所定の閉弁力(開弁力)となるように制御されることで、各車輪ブレーキFL、RR、RL、FR内の液圧を所定の傾きで増加させる。
【0030】
出口弁2は、各車輪ブレーキFL、RR、RL、FRと各リザーバ3との間(入口弁1のホイールシリンダW側の液圧路からリザーバ3及びポンプ4に連通する液圧路上)に配置された常閉型の電磁弁(ノーマルクローズタイプのソレノイドバルブ)で構成される。出口弁2は、通常時に弁閉状態となっているが、車輪Tがロックしそうになったときに制御部20により弁開状態に切り換えられることで、各車輪ブレーキFL、RR、RL、FRに加わる液圧を各リザーバ3に逃がすことができる。
【0031】
チェック弁1aは、各入口弁1と並列に接続されている。このチェック弁1aは、各車輪ブレーキFL、RR、RL、FR側からマスタシリンダM側へのブレーキ液の流入のみを許容し、一方、マスタシリンダM側から各車輪ブレーキFL、RR、RL、FR側への流入を阻止するものである。ブレーキペダルPからの入力が解除された場合(例えば、操作者がブレーキペダルPから足を離した場合)、入口弁1が弁閉状態となっているときでも、各車輪ブレーキFL、RR、RL、FR側からマスタシリンダM側へのブレーキ液の流れが許容される。
【0032】
リザーバ3は、各出口弁2が弁開状態に切り換えられることによって逃がされるブレーキ液を吸収する機能を有する。
ポンプ4は、リザーバ3で貯留されているブレーキ液を吸入し、そのブレーキ液を、オリフィス5を介してマスタシリンダMへ戻す機能を有する。これにより、リザーバ3によるブレーキ液圧の吸収によって減圧された各出力液圧路81、82内の圧力状態が回復される。
【0033】
入口弁1及び出口弁2は、制御部20により弁開状態と弁閉状態とが切り換え制御されることで、各車輪ブレーキFL、RR、RL、FRのホイールシリンダW内における液圧(キャリパ圧ともいう)を制御する。例えば、入口弁1が弁開状態で出口弁2が弁閉状態となる通常状態では、操作者がブレーキペダルPを踏み込んでいれば、マスタシリンダMからの液圧がそのままホイールシリンダWへ伝達されて増圧状態となる。
【0034】
また、入口弁1が弁閉状態で出口弁2が弁開状態となれば、ホイールシリンダMからリザーバ3側へブレーキ液が流出して減圧状態となる。さらに、入口弁1と出口弁2とがそれぞれ弁閉状態となれば、キャリパ圧(ホイールシリンダW内の液圧)が保持される保持状態となる。さらにまた、入口弁1を所定の開弁量(リフト量)で弁開状態とした場合、ホイールシリンダW内の液圧が所定の傾きで徐々に増圧する増圧状態となる。
【0035】
この場合、制御部20は、各ホイールシリンダWで目標とする目標ブレーキ液圧(後記する)に対応して、前記増圧状態、減圧状態、保持状態を、それぞれ切り換えるべく、各入口弁1や各出口弁2に対して所定量の電流又は制御信号を出力する。
【0036】
次に、制御部20について、以下詳細に説明する。
図3は、制御部の概略構成ブロック図、図4(a)は、判定手段の構成ブロック図、図4(b)は、目標ブレーキ液圧算出手段の構成ブロック図である。
【0037】
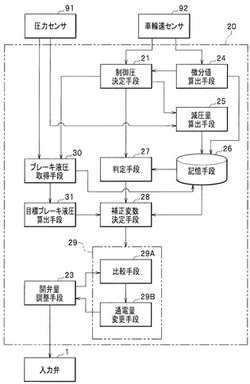
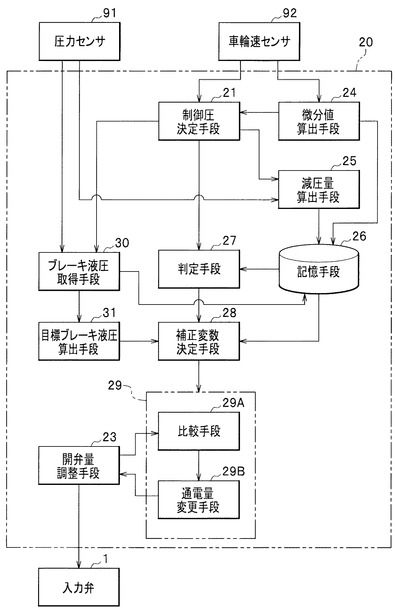
図3に示すように、制御部20は、制御圧決定手段21、開弁量調整手段23、車輪加速度取得手段として機能する微分値算出手段24、減圧量算出手段25、記憶手段26、判定手段27、補正変数決定手段28、補正手段29、ブレーキ液圧取得手段30及び目標ブレーキ液圧算出手段31を備える。
【0038】
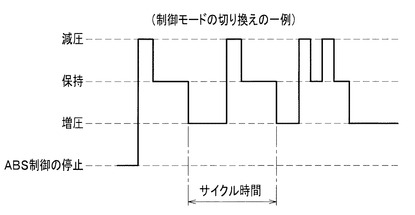
制御圧決定手段21は、車両の状態に応じて、キャリパ圧を増圧状態、減圧状態、保持状態のいずれにするのか、すなわち、ABS制御の停止状態から「増圧制御」、「保持制御」又は「減圧制御」のいずれの制御を行うかを決定する機能を有する。なお、図8は、制御モードの切り換えの一例を便宜的に示したものであり、一番下の位置がABS制御の停止状態となっており、前記ABS制御の停止の上段の位置が「増圧制御」、増圧制御の上段の位置が「保持制御」、前記保持制御の上段で一番上の位置が「減圧制御」となっている。
【0039】
具体的には、例えば、制御圧決定手段21は、車輪速センサ92で検出される車輪速度と、4つの車輪Tの車輪速度に基づいて推定される車体速度との速度比(スリップ率)が、所定値以上となり、且つ、車輪加速度が0以下であるときに車輪Tがロックしそうになったと判定して、減圧制御を行うことを決定する。なお、車輪加速度は、例えば、後記する微分値算出手段24によって車輪速度を微分演算することで算出される。
【0040】
また、制御圧決定手段21は、車輪加速度が0よりも大きいときに、保持制御を行うことを決定する。さらに、制御圧決定手段21は、スリップ率が所定値未満となり、且つ、車輪加速度が0より大きいとき、増圧制御を行うことを決定する。
【0041】
この制御圧決定手段21は、増圧制御を行うことを決定した場合、増圧開始信号を判定手段27に出力する。また、この制御圧決定手段21は、減圧制御を行うことを決定した場合、減圧開始信号を減圧量算出手段25に出力する。
【0042】
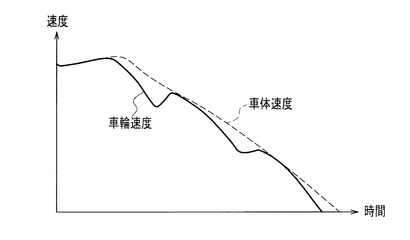
微分値算出手段24は、車輪速センサ92から車輪速度を取得し、前記取得した車輪速度を順次微分して、その微分値を車輪加速度として記憶手段26及び制御圧決定手段21に出力する機能を有する。ここで、「車輪速度の微分値」とは、図9に示す車輪速度の単位時間当たりの増減量(車輪速度特性曲線の傾き)、すなわち車輪加速度をいう。
【0043】
なお、本実施形態では、車輪速度が下がっていく場合にはマイナスの微分値が算出され、車輪速度が上がっていく場合にはプラスの微分値が算出されるものとする。この場合、プラスの微分値が算出されている間は、ロックしそうになった車輪の車輪速度が回復している状態を示し、微分値が大きくなる程、傾きが大きくなって、車輪速度が迅速に車体速度へ復帰していることを示している。微分値算出手段24で算出された複数の車輪加速度は、全て記憶手段26で記憶される。
【0044】
減圧量算出手段25は、制御圧決定手段21からの減圧開始信号を受け取ると、減圧制御中における出口弁2の駆動時間(累積した駆動時間)に基づいてキャリパ圧の減圧量(減圧開始時のキャリパ圧と増圧開始時のキャリパ圧との圧力差)を算出する機能を有する。なお、減圧量算出手段25で算出された減圧量は、記憶手段26に出力されて記憶される。
【0045】
記憶手段26は、上書き可能なRAM等で構成される記憶装置からなり、本実施形態では、算出された後記する目標ブレーキ液圧等が上書き可能な状態で記憶されている。
【0046】
判定手段27は、図4(a)に示すように、第1サイクル時間判定手段27Aと、車輪加速度判定手段27Bとから構成される。
【0047】
第1サイクル時間判定手段27Aは、後記するように、前回の増圧制御の開始時点から今回の増圧制御の開示時点までのサイクル時間が第1の所定時間以内にあるか否かを判定する機能を有する。第1サイクル時間判定手段27Aは、前記サイクル時間が第1の所定時間以内にあると判定した場合、そのことを示す所定の信号を補正変数決定手段28に出力する。
【0048】
車輪加速度判定手段27Bは、減圧制御の開始時点から次回の増圧制御の開始時点までの時間のうち、少なくとも車輪速度が増加傾向となる時間内の車輪加速度(プラスの微分値)の最大値を取得し、前記車輪加速度の最大値が所定値以上であるか否かを判定する機能を有する。車輪加速度判定手段27Bは、前記車輪加速度の最大値が所定値以上であると判定した場合、そのことを示す所定の信号を補正変数決定手段28に出力する。
【0049】
補正変数決定手段28は、判定手段27から各所定の信号を受けたことを条件として、後記する目標ブレーキ液圧算出手段31によって算出された目標ブレーキ液圧及び記憶手段26に記憶されたデータ及びマップ等に基づいて、入口弁1に供給する通電量を補正するための補正増圧レート(単位時間当たりの補正量)及び補正時間を決定する機能を有する。補正変数決定手段28は、決定された補正増圧レート及び補正時間のデータを補正手段29に出力する。なお、補正増圧レート及び補正時間は、後記するように、図5に示すフローチャート(ステップS7)で詳細に説明する。また、入口弁1に供給する通電量と入口弁1の開弁量とは、相関関係があるものとする。
【0050】
ブレーキ液圧取得手段30は、各車輪ブレーキFL、RR、RL、FR内の推定ブレーキ液圧を取得する。この推定ブレーキ液圧は、公知の手法で算出されるキャリパ圧からなり、例えば、圧力センサ91で検出されたマスタシリンダ圧と、制御圧決定手段21で決定された入口弁1及び出口弁2の開閉状態に基づいて算出(推定)されるキャリパ圧である。ブレーキ液圧取得手段30で取得された推定ブレーキ液圧は、基本目標ブレーキ液圧算出手段31Bに出力されると共に、記憶手段26に出力されて記憶される。
【0051】
なお、本実施形態では、ブレーキ液圧取得手段30で取得されるブレーキ液圧を、推定ブレーキ液圧として以下説明しているが、これに限定されるものではなく、例えば、図示しないセンサを用いて各車輪ブレーキFL、RR、RL、FR内の実際のブレーキ液圧を検出したものであってもよい。
【0052】
目標ブレーキ液圧算出手段31は、各車輪ブレーキFL、RR、RL、FR内の目標となるブレーキ液圧を算出する機能を有し、図4(b)に示すように、第2サイクル時間判定手段31Aと、基本目標ブレーキ液圧算出手段31Bと、補正目標ブレーキ液圧算出手段31Cとから構成される。
【0053】
第2サイクル時間判定手段31Aは、目標ブレーキ液圧を算出する際、前回の増圧制御の開始時点から今回の増圧制御の開示時点までのサイクル時間が第2の所定時間以内にあるか否かを判定する機能を有する。第2サイクル時間判定手段31Aは、前記サイクル時間が第2の所定時間以内にあると判定した場合、そのことを示す所定の信号を補正変数決定手段28に出力する。なお、第1サイクル時間判定手段27Aにおける第1の所定時間と、第2サイクル時間判定手段31Aにおける第2の所定時間とは、本実施形態では同一の値であるものとして説明するが(図10中の1点鎖線参照)、異なる値であってもよい。
【0054】
基本目標ブレーキ液圧算出手段31Bは、前回の減圧制御の開始時点においてブレーキ液圧取得手段30で取得された推定ブレーキ液圧(ロック液圧)に基づいて基本目標ブレーキ液圧を算出する機能を有する。基本目標ブレーキ液圧算出手段31Bで算出された基本目標ブレーキ液圧は、補正変数決定手段28に出力される。
【0055】
補正目標ブレーキ液圧算出手段31Cは、目標ブレーキ液圧の前回値を所定量だけオフセット(補正オフセット)させた値である補正目標ブレーキ液圧を算出する機能を有する。このオフセットとは、増圧制御又は減圧制御におけるブレーキ液圧の増減があまりにも過敏になるのを回避するため、前回の目標ブレーキ液圧値から所定量だけ下げる補正を行うものである。補正目標ブレーキ液圧算出手段31Cで算出された補正目標ブレーキ液圧は、補正変数決定手段28に出力される。
【0056】
補正手段29は、比較手段29Aと通電量変更手段29Bとを備えており、補正変数決定手段28から送られてくる補正変数(補正増圧レート及び補正時間)に基づいて、補正時間の間、増圧制御時における所定の増圧レートを補正する機能を有する。
【0057】
比較手段29Aは、補正変数決定手段28から送られてくる補正増圧レートを受け取ると、この補正増圧レートが所定の増圧レート以上であるか否かを判断する機能を有する。比較手段29Aは、補正増圧レートが所定の増圧レート以上であると判断した場合に補正増圧レートを通電量変更手段29Bに出力し、一方、補正増圧レートが所定の増圧レート未満であると判断した場合に所定の増圧レートを通電量変更手段29Bに出力する。
【0058】
通電量変更手段29Bは、比較手段29Aから補正増圧レートを受け取った場合、この補正増圧レートに対応する電流値を算出し、その電流値を開弁量調整手段23に出力する機能を有する。開弁量調整手段23では、通電量変更手段29Bから補正された電流値が送られてきた場合、算出した電流値を補正された電流値に置き換えて入口弁1の通電制御(増圧制御)を行う。
【0059】
以上のように構成される制御部20は、図5に示すフローチャートに基づいて入口弁1の開弁制御(増圧制御)を行う。以下に、制御部20による入口弁1の開弁制御について説明する。なお、図5に示すフローチャートは、ABS制御が開始された後に開始される。また、制御圧決定手段21が減圧状態又は保持状態を決定した場合、制御部20は、減圧制御又は保持制御を実行する。
【0060】
先ず、制御部20は、目標ブレーキ液圧を算出する(ステップS1)。この目標ブレーキ液圧の算出は、図6に示すサブルーチンフローチャートに沿って実行される。以下、図6に基づいて説明する。
【0061】
制御部20は、制御圧決定手段21がキャリパ圧を減圧状態又は保持状態から増圧状態にすることを決定したか否か、すなわち、減圧状態又は保持状態から増圧状態に移行したか否かを判断する(ステップS101)。ここで、移行の判断は、例えば、制御圧決定手段21が前回決定した制御モードが減圧制御又は保持制御であり、今回決定した制御モードが増圧制御である場合に、移行したと判断する(ステップS1→Yes)。一方、今回の制御モードが減圧制御又は保持制御である場合、並びに、前回及び今回の両方がともに増圧制御である場合には、移行していないと判断する(ステップS101→No)。なお、ステップS101で「No;移行していない」と判断された場合、前回の目標ブレーキ液圧を取得し、この取得された前回の目標ブレーキ液圧をそのまま目標ブレーキ圧とする(ステップS110)。
【0062】
制御部20は、ステップ101で増圧状態に移行したと判断した後、前回の増圧開始時間から今回の増圧開始時間までのサイクル時間(図8参照)を取得する(ステップS102)。このサイクル時間は、例えば、図示しないタイマ回路によって計測される。
【0063】
続いて、制御部20の第2サイクル時間判定手段31Aは、このサイクル時間が予め記憶手段26に記憶された第2の所定時間以内か否かを判断する(ステップS103)。第2サイクル時間判定手段31Aにおいて、サイクル時間が第2の所定時間以内であると判断された場合(ステップS103→Yes)、すなわち、後記する車輪振動状態にあると推定される場合、補正目標ブレーキ液圧算出手段31Cは、前回の目標ブレーキ液圧を取得し(ステップS104)、この前回の目標ブレーキ液圧から補正オフセットを減算した補正目標ブレーキ液圧を算出する(ステップS105、S106)。この結果、制御部20は、記憶手段26に記憶されている目標ブレーキ液圧を補正目標ブレーキ液圧に上書きする。
【0064】
一方、制御部20の第2サイクル時間判定手段31Aにより、ステップS103において、サイクル時間が第2の所定時間を越えていると判断された場合(ステップS103→No)、すなわち、後記する車輪振動状態にないものと推定される場合、基本目標ブレーキ液圧算出手段31Bは、前回のロック液圧、すなわち、前回の減圧制御の開始時点のブレーキ液圧値を取得し(ステップS107)、この前回のロック液圧から基本オフセットを減算した基本目標ブレーキ液圧を算出する(ステップS108、S109)。
【0065】
このようにして得られた目標ブレーキ液圧(前回の目標ブレーキ液圧値、補正目標ブレーキ液圧値、又は、基本目標ブレーキ液圧値のいずれか)は、記憶手段26に記憶され、適宜、上書きされると共に、補正変数決定手段28に出力される。
【0066】
次に、図5のメインルーチンに戻って、制御部20は、記憶手段26から所定の増圧レートを取得する(ステップS2)。この所定の増圧レートは、記憶手段26に予め記憶されているものであり、例えば、実験等によって得られたデータ又はマップ等によって構成される。
【0067】
続いて、制御部20は、キャリパ圧が減圧状態又は保持状態から増圧状態に移行したか否かを判断する(ステップS3)。このステップS3における増圧状態に移行したか否かの判断は、目標ブレーキ液圧の算出におけるステップS101と同様である。
【0068】
ステップS3において、制御部20は、制御圧決定手段21がキャリパ圧を減圧状態又は保持状態から増圧状態にすることを決定した、すなわち、増圧状態に移行したと判断した場合(ステップS3→Yes)、車輪加速度判定手段27Bで演算された車輪加速度の最大値と、前回の増圧制御の開始時間から今回の増圧制御の開始時間までのサイクル時間(図8参照)を取得する(ステップS4)。
【0069】
制御部20の第1サイクル時間判定手段27A及び車輪加速度判定手段27Bは、前記ステップS4で取得した車輪加速度の最大値が所定値以上であり、且つ、サイクル時間が第1の所定時間以内であるか否かを判断する(ステップS5)。
【0070】
ステップS5において、第1サイクル時間判定手段27A及び車輪加速度判定手段27Bは、車輪加速度の最大値が所定値以上であり、且つ、サイクル時間が第1の所定時間以内であると判断した場合(ステップS5→Yes)、すなわち、後記する車輪振動状態が発生しており、且つ、車輪速度が車体速度に急速に復帰していると推定される場合、ステップS1で求められた目標ブレーキ液圧(この場合は、3種類の目標ブレーキ液圧のうちの補正目標ブレーキ液圧)を取得すると共に、今回の増圧開始時における推定ブレーキ液圧を取得する(ステップS6)。さらに、目標ブレーキ液圧(補正目標ブレーキ液圧)と推定ブレーキ液圧との差(差分)に基づいて補正変数(補正増圧レート及び補正時間)を算出する(ステップS7)。
【0071】
ここで、補正変数の設定の一例を図7に基づいて説明する。
図7において、横軸に目標ブレーキ液圧と推定ブレーキ液圧との差分をとり、一側の縦軸に補正増圧レートをとり、他側の縦軸に補正時間をとっている。
【0072】
この場合、記憶手段26には、目標ブレーキ液圧と推定ブレーキ液圧との差分に対応する補正増圧レートがデータ又はマップ等で記憶されており、目標ブレーキ液圧と推定ブレーキ液圧との差分が算出されると、前記差分に対応する補正増圧レートが決定される。また、本実施形態において、補正時間は、目標ブレーキ液圧と推定ブレーキ液圧との差に拘わらず、所定時間(一定)に設定されているが、これに限定されるものではなく、補正時間が可変となるように設定されていてもよい。なお、補正時間が可変となる場合の一例としては、目標ブレーキ液圧と推定ブレーキ液圧との差分が大きくなるのに対応して、補正時間を徐々に大きく設定することが挙げられる。
【0073】
このようにして、補正増圧レートと補正時間によって補正変数が設定され、設定された補正変数に基づき開弁量調整手段23によって入口弁1の開弁量が増圧制御される。
【0074】
一方、ステップS5において、車輪加速度の最大値が所定値未満であり、且つ、サイクル時間が第1の所定時間を越える場合、車輪加速度の最大値が所定値以上であるがサイクル時間が第1の所定時間を越える場合、又は、車輪加速度の最大値が所定値未満であってサイクル時間が第1の所定時間以内である場合のいずれかの場合(ステップS5→No)、補正増圧レートを算出することがなく、所定の増圧レートのまま、後記するステップS11に進む。
【0075】
次に、ステップS3において、増圧状態に移行していないと判断される場合について説明する。
制御部20は、制御モードが、減圧制御、保持制御、又は、前回及び今回の制御モードが共に増圧制御となっている場合、増圧状態に移行していないと判断し(ステップS3→No)、ステップS8に進む。
【0076】
このステップS8では、補正時間の残りが0となっているか否かを判断し、補正時間が0であると判断された場合(ステップS8→Yes)、ステップ11に進む。なお、ステップS8で「Yes」となるのは、後記するステップS10で補正時間がカウントダウンされた結果、補正時間が0になっている場合と、ステップS5で「No」と判定されて、補正時間が設定されていない場合(すなわち、補正時間が初期値0のままである場合)である。一方、補正時間の残りが0でなく未だ残っている場合(ステップS8→No)、未だ補正変数を用いた増圧状態が継続しているため、ステップS2で取得された補正増圧レート及び補正時間で構成される所定の増圧レートで補正し(ステップS9)、残存する補正時間だけカウントダウンされる(ステップS10)。
【0077】
ステップS11では、算出された補正増圧レートが予め設定された所定の増圧レート以上であるか否かが比較手段29Aで比較され、補正増圧レートが所定の増圧レート以上である場合(ステップS11→Yes)、比較手段29Aから補正増圧レートが出力される(ステップS12)。この場合、通電量変更手段29Bによって補正増圧レートに対応するように入口弁1に対する通電量が変更され、開弁量調整手段23により入口弁の開弁量が増圧制御される。
【0078】
これに対し、補正増圧レートが所定の増圧レート未満である場合(ステップS11→No)、比較手段29Aから所定の増圧レートが出力される。この場合、通電量変更手段29Bによって所定の増圧レートに対応するように入口弁1に対する通電量が変更され、開弁量調整手段23により入口弁1の開弁量が制御される。但し、ステップS5やステップS8で「No」と判断されて補正増圧レートが設定されなかった場合は、補正増圧レートは0であるものと看做してステップS11における判断を行うものとする。
【0079】
このように本実施形態では、補正手段29を構成する比較手段29Aにおいて、補正増圧レートと所定の増圧レートとを比較し、所定の補正レートよりも補正増圧レートが大きい場合にのみ、補正が行われる。この結果、本実施形態では、所定の補正レートが補正増圧レートよりも大きい場合に補正増圧レートが不要となり、補正増圧レートによってブレーキ液圧を迅速に減速制御に復帰させる場合にのみ増圧補正レート処理を適用することができる。
【0080】
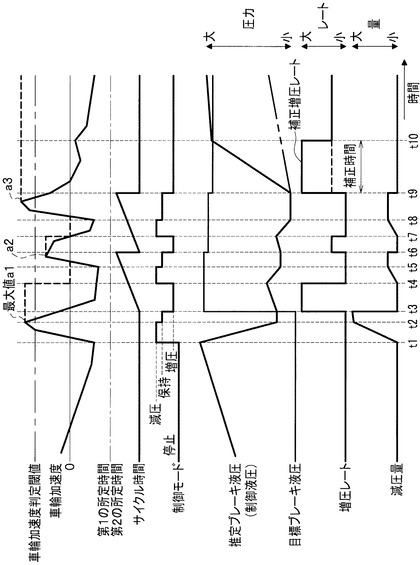
次に、車輪振動状態における制御部20の制御動作を図9及び図10に基づいて説明する。図9は、例えば、路面に連続する複数の段差があったときの車輪速度と車体速度との関係を示す特性図、図10は、図9の状態において、車輪加速度とサイクル時間と制御モードと推定ブレーキ液圧と目標ブレーキ液圧と増圧レートと減圧量との関係を示すタイムチャートである。
【0081】
なお、図10中では、車輪加速度を太線実線で示し、車輪加速度の最大値a1〜a3を太線破線で示している。この車輪加速度の最大値a1〜a3は、制御モードが減圧制御及び保持制御にあるときの車輪加速度の最大値を保持して得られる値であり、次回の減圧制御のときに「0」にリセットされる。この車輪加速度の最大値a1〜a3は、増圧制御の開始時点において、予め設定された車輪加速度判定閾値以上か否かの判断に用いられる。
【0082】
例えば、車両が走行する路面に連続する複数の段差があったときに、操作者がブレーキペダルPを踏み込んで車輪に制動力を付与して車体速度を減速させた場合、車輪が段差を乗り越えて着地する前に空中に浮いた状態となるため、制動力を付与された車輪がロックしそうになり、その結果、制御部20によるABS制御が開始される(図10の時刻t1参照)。
【0083】
ABS制御が開始されると、制御部20によって制御モードが減圧制御に切り換えられ、時刻t1から時刻t2の間で推定ブレーキ液圧(制御液圧)を減少させる減圧制御が実行され、続いて、時刻t2から時刻t3の間で保持制御が実行される。また、時刻t4から時刻t6の間、及び、時刻t7から時刻t9の間には、2回目以降の減圧制御及び保持制御がそれぞれ実行されるが、第1回目の減圧制御と比較して、減圧量がより一層小さくなっている。
【0084】
第1回目の減圧制御及び保持制御が実行された後、時刻t3から時刻t4の間で第1回目の増圧制御が実行され、時刻t4から時刻t6の間で第2回目の減圧制御及び保持制御がなされた後、時刻t6から時刻t7の間でさらに第2回目の増圧制御(前回の増圧制御)が実行される。さらに、時刻t7から時刻t9の間で第3回目の減圧制御及び保持制御がなされた後、時刻t9を開始時点として第3回目の増圧制御(今回の増圧制御)が実行される。
【0085】
この場合、時刻t3から開始される第1回目の増圧制御では、基本目標ブレーキ液圧を目標ブレーキ液圧とし、時刻t6から開始される第2回目の増圧制御及び時刻t9から開始される第3回目の増圧制御では、それぞれ、時刻t3から時刻t6までの時間、時刻t6から時刻t9までの時間であるサイクル時間が第2の所定時間以内となっているため、補正目標ブレーキ液圧を目標ブレーキ液圧として設定される。
【0086】
時刻t3から時刻t4の間において、大きな減圧量に対応して増圧レートを大幅に上昇させた補正が、補正手段29とは別個の補正手段によって、例えば、特開2009−23465号公報に開示された方法で行われる。また、時刻t6から時刻t7の間では、補正手段29により所定の増圧レートで、小さな減圧量に対応して増圧量が小さい補正が行われる。第2回目の増圧制御が開始される時刻t6では、車輪加速度の最大値a2が車輪加速度判定閾値を下回っているため、補正増圧レートによる補正が実行されない。
【0087】
時刻t9から時刻t10の間では、さらに第3回目の増圧制御(今回の増圧制御)が実行されるが、その際、補正手段29は、時刻t7から時刻t8の間の減圧制御による減圧量が小さいにも拘わらず、所定の増圧レートではなく、図7で求めた補正増圧レートに基づいて増圧補正することにより、時刻t9におけるブレーキ推定液圧の立ち上がりを急激(傾きを大きく)とすることができる。
【0088】
換言すると、第3回目の増圧制御が実行される時刻t9の時点では、車輪加速度の最大値a3が車輪加速度判定閾値以上となっており、且つ、サイクル時間が第1の所定時間以内となっているため、車輪が振動している状態(車輪振動状態)にあり、且つ、車輪速度が車体速度に急速に復帰していると推定され、補正時間内で補正増圧レートによる補正が実行される。
【0089】
この結果、本実施形態では、車輪振動状態にあり、且つ、車輪速度が車体速度に急速に復帰していると推定される場合、減圧制御による減圧量が小さいにも拘わらず、ブレーキ液圧を増圧補正することにより、ブレーキ液圧を迅速に復帰させることができる。なお、時刻t6から時刻t9までの時間がサイクル時間となり、今回の増圧制御の開始時点である時刻t9における目標ブレーキ液圧と推定ブレーキ液圧との差分に基づいて補正増圧レートが算出される。
【0090】
これに対し、時刻t9における今回の増圧制御を、仮に、補正増圧レートではなく、所定の増圧レートに基づいて補正した場合、図10中の細線破線で示すように増圧量の小さい増圧レートとなり、また、推定ブレーキ液圧は、図10中の太線二点鎖線で示すように緩やかな立ち上がりとなるため、減速度復帰に時間が要する。
【0091】
本実施形態では、サイクル時間が第1の所定時間以内のとき、すなわち、路面に連続する複数の段差があったり、路面がうねっていたり、悪路であったり、インギアによる駆動系の振動が発生していたりすることで、減圧制御が短時間だけ行われる車輪振動状態と推定されるときであって、且つ、車輪速度が車体速度に急速に復帰していると推定される、車輪加速度の最大値が所定値以上のとき、補正手段29が補正時間内において補正増圧レートで補正することができる。このため、本実施形態では、減圧制御時に減圧量が少ない状況であっても、ブレーキ液圧を迅速に復帰させることができる。なお、ブレーキ液圧取得部30が取得するブレーキ液圧は、車輪ブレーキ内の実際のブレーキ液圧であってもよいし、又は、推定された推定ブレーキ液圧のいずれであってもよい。
【0092】
また、本実施形態では、サイクル時間が第2の所定時間以内のときに車輪振動状態にあると推定し、目標ブレーキ液圧を前回の減圧制御の開始時点(時刻t7)のブレーキ液圧(ロック液圧)に基づいて小さくなりすぎないようにすることができるので、ブレーキ液圧と目標ブレーキ液圧との差(差分)を有効に利用して補正することができる。なお、本実施形態では、第2の所定時間が第1の所定時間と同一値であるものとして説明したが、異なる値であってあってもよい。
【0093】
さらに、本実施形態では、補正時間中に補正増圧レートで増圧制御されることで発生する増圧量が目標ブレーキ液圧に到達するように、補正増圧レート及び補正時間を決定(設定)することができる。この結果、本実施形態では、補正増圧レート及び補正時間を、車両用ブレーキ液圧制御装置の増圧特性や車両環境等によって適宜バランスさせることができる。
【0094】
さらにまた、本実施形態では、ブレーキ液圧と目標ブレーキ液圧との差が大きいほど補正増圧レートを大きく設定することができるため、ブレーキ液圧と目標ブレーキ液圧との差が大きい場合でも、ブレーキ液圧を迅速に復帰させることができる。
【0095】
またさらに、本実施形態では、補正時間を変更しないで増圧補正レートのみを可変させることによりブレーキ液圧を迅速に復帰させることができ、補正増圧レートの設定を簡便に遂行することができる。
【0096】
またさらに、本実施形態では、所定の増圧レートが補正増圧レートよりも大きい場合、補正増圧レートを用いることがないため、補正増圧レートによってブレーキ液圧を迅速に復帰させることができる場合にのみ、本補正を適用することができる。
【符号の説明】
【0097】
1 入力弁(常開型比例電磁弁)
2 出力弁(常閉型電磁弁)
20 制御部(制御手段)
23 開弁量調整手段
27A 第1サイクル時間判定手段
27B 車輪加速度判定手段
28 補正変数決定手段
29 補正手段
30 ブレーキ液圧取得手段
31 目標ブレーキ液圧算出手段
31A 第2サイクル時間判定手段
31B 基本目標ブレーキ液圧算出手段
31C 補正目標ブレーキ液圧算出手段
【技術分野】
【0001】
本発明は、車両用ブレーキ液圧制御装置に関し、一層詳細には、アンチロックブレーキ制御を実行可能な車両用ブレーキ液圧制御装置に関する。
【背景技術】
【0002】
従来から、車輪ブレーキによる制動力を制御することが可能な車両用ブレーキ液圧制御装置が知られている。この車両用ブレーキ液圧制御装置では、例えば、車輪がロックしそうになったと判断されたとき、車輪ブレーキのキャリパ圧を減圧して車輪のロックを防止する、いわゆるアンチロックブレーキ制御(ABS制御)がなされている。
【0003】
この種の車両用ブレーキ液圧制御装置として、例えば、特許文献1には、単発の段差等によって車輪がロックしそうになり減圧量の大きな減圧制御を行う状況において、前記減圧量に基づいてキャリパ圧の増圧レートを補正し、迅速にブレーキ液圧を復帰させることが可能な車両用ブレーキ液圧制御装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−23465号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、路面に、単発ではなく、複数の連続する段差があったり、路面がうねっていたり、路面が悪路であったり、又は、インギアによる駆動系の振動が発生することで、車輪が継続して振動する場合がある。
【0006】
このように車輪が継続して振動する場合には、特に、2回目以降の減圧制御時に減圧量が大きくなりにくいため(1回目と比較して減圧量がより小さくなるため)、このような状況においてもブレーキ液圧を迅速に復帰させるための、更なる改良が希求されている。
【0007】
本発明は、前記の点に鑑みてなされたものであり、例えば、車輪が継続して振動する場合に、減圧量の大小に拘わらず増圧補正をすることが可能な車両用ブレーキ液圧制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
前記の目的を達成するために、本発明は、液圧源と車輪ブレーキとの間に介装される常開型比例電磁弁と、車輪ブレーキ内のブレーキ液圧を逃がす常閉型電磁弁と、前記常開型比例電磁弁及び前記常閉型電磁弁を制御して前記車輪ブレーキ内のブレーキ液圧の増圧制御、保持制御又は減圧制御を行う制御手段と、を有する車両用ブレーキ液圧制御装置であって、前記制御手段は、前記増圧制御中、前記ブレーキ液圧が所定の増圧レートで増圧されるように前記常開型比例電磁弁の開弁量を制御する開弁量制御手段と、前回の増圧制御の開始時点から今回の増圧制御の開始時点までのサイクル時間が第1の所定時間以内であるか否かを判定する第1サイクル時間判定手段と、前記減圧制御の開始時点から次回の増圧制御の開始時点までの時間のうち少なくとも車輪速度が増加傾向となる時間内の車輪加速度を取得し、前記車輪加速度が所定値以上であるか否かを判定する車輪加速度判定手段と、前記車輪ブレーキ内のブレーキ液圧を取得するブレーキ液圧取得手段と、前記車輪ブレーキ内の目標ブレーキ液圧を算出する目標ブレーキ液圧算出手段と、前記第1サイクル時間判定手段で前記サイクル時間が前記第1の所定時間以内であると判定され、且つ、前記車輪加速度判定手段で前記車輪加速度が所定値以上であると判定されたことを条件として、前記ブレーキ液圧取得手段により取得された今回の増圧制御の開始時点におけるブレーキ液圧と前記目標ブレーキ液圧との差に基づいて補正増圧レート及び補正時間を決定する補正変数決定手段と、前記補正時間の間、前記開弁量を、前記車輪ブレーキ内のブレーキ液圧が前記補正増圧レートで増圧されるように補正する補正手段と、を備えることを特徴とする。
【0009】
サイクル時間(前回の増圧制御の開始時点から今回の増圧制御の開始時点までの時間)が第1の所定時間以内のときは、路面に連続する複数の段差があったり、路面がうねっていたり、悪路であったり、インギアによる駆動系の振動が発生していたりすることで、減圧制御が短時間だけ行われる車輪振動状態と推定される。また、ロック傾向にあった車輪の車輪加速度が所定値以上のときには、車輪の振動が収まり、車輪速度が車体速度に急速に復帰している(車輪が路面と接触し、車輪速度が車体速度に追従している)と推定される。本発明によれば、このように推定されたときに補正手段が補正時間内において補正増圧レートで補正することで、減圧量の大小に拘わらずブレーキ液圧を迅速に復帰させることができる。なお、ブレーキ液圧取得手段が取得するブレーキ液圧は、車輪ブレーキ内の液圧センサにより計測された実際のブレーキ液圧であってもよいし、又は、推定された推定ブレーキ液圧のいずれであってもよい。
【0010】
また、本発明は、前記制御手段が、前回の増圧制御の開始時点から今回の増圧制御の開始時点までのサイクル時間が第2の所定時間以内であるか否かを判定する第2サイクル時間判定手段を備え、前記目標ブレーキ液圧算出手段は、前回の減圧制御の開始時点において前記ブレーキ液圧取得手段により取得されたブレーキ液圧に基づいて基本目標ブレーキ液圧を算出する基本目標ブレーキ液圧算出手段と、前記目標ブレーキ液圧の前回値を所定量だけオフセットさせた補正目標ブレーキ液圧を算出する補正目標ブレーキ液圧算出手段と、を有し、前記第2サイクル時間判定手段で前記サイクル時間が第2の所定時間以内であると判定された場合には、前記基本目標ブレーキ液圧に代えて、前記補正目標ブレーキ液圧を前記目標ブレーキ液圧とすることを特徴とする。
【0011】
このような構成によれば、サイクル時間が第2の所定時間以内のときには車輪振動状態にあると推定し、前回の減圧制御の開始時点のブレーキ液圧(ロック液圧)ではなく、目標ブレーキ液圧の前回値を所定量だけオフセットさせた補正目標ブレーキ液圧に基づいて目標ブレーキ液圧を算出することにより、目標ブレーキ液圧を小さくなりすぎないようにすることができる。このため、ブレーキ液圧と目標ブレーキ液圧との差(差分)を有効に利用して補正することができる。なお、第2の所定時間は、前記第1の所定時間と同一値であってもよいし、又は、異なる値であってもよい。また、オフセットは、前回の目標ブレーキ液圧値から所定量だけ下げる補正をいう。
【0012】
さらに、本発明は、前記補正変数決定手段が、前記ブレーキ液圧取得手段により取得されたブレーキ液圧と前記目標ブレーキ液圧との差が前記補正時間内に0又は0に近づくように、前記補正増圧レート及び前記補正時間を決定することを特徴とする。
【0013】
このような構成によれば、補正時間中に補正増圧レートで増圧制御されることで発生する増圧量が目標ブレーキ液圧に到達するように、補正増圧レート及び補正時間を決定(設定)することができる。この結果、補正増圧レート及び補正時間を、車両用ブレーキ液圧制御装置の増圧特性や車両環境等によって適宜バランスさせることができる。
【0014】
さらにまた、本発明は、前記補正変数決定手段が、前記ブレーキ液圧取得手段により取得されたブレーキ液圧と前記目標ブレーキ液圧との差が大きいほど前記補正増圧レートが大きくなるように前記補正増圧レートを決定することを特徴とする。
【0015】
このような構成によれば、ブレーキ液圧と目標ブレーキ液圧との差が大きいほど補正増圧レートを大きく設定することができるため、ブレーキ液圧と目標ブレーキ液圧との差が大きい場合でも、ブレーキ液圧を迅速に復帰させることができる。
【0016】
またさらに、本発明は、前記補正変数決定手段が、前記ブレーキ液圧取得手段により取得されたブレーキ液圧と前記目標ブレーキ液圧との差に拘わらず、前記補正時間を一定の時間に決定することを特徴とする。
【0017】
このような構成によれば、補正時間を変更しないで補正増圧レートのみによる補正でブレーキ液圧を可変させることにより、ブレーキ液圧を迅速に復帰させることができると共に、補正増圧レートの設定を簡便に遂行することができる。
【0018】
またさらに、本発明は、前記補正手段が、前記所定の増圧レートよりも前記補正増圧レートの方が大きい場合にのみ、前記補正を行うことを特徴とする。
【0019】
このような構成によれば、所定の増圧レートが補正増圧レートよりも大きい場合には、補正増圧レートを用いることがないため、補正増圧レートによってブレーキ液圧を迅速に復帰させることができる場合にのみ、本補正を適用することができる。
【発明の効果】
【0020】
本発明によれば、例えば、車輪が継続して振動する場合に、減圧量の大小に拘わらず増圧補正をすることが可能な車両用ブレーキ液圧制御装置を得ることができる。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態に係る車両用ブレーキ液圧制御装置が組み込まれた車両の構成図である。
【図2】前記車両用ブレーキ液圧制御装置の概略構成図である。
【図3】制御部の概略構成ブロック図である。
【図4】(a)は、判定手段の構成ブロック図、(b)は、目標ブレーキ液圧算出手段の構成ブロック図である。
【図5】制御部における制御処理の流れの一例を示すフローチャートである。
【図6】図5における目標ブレーキ液圧算出ステップのサブルーチンフローチャートである。
【図7】目標ブレーキ液圧と推定ブレーキ液圧との差分と、補正増圧レートとの関係を示す特性図である。
【図8】制御モードの切り換えの一例を示す説明図である。
【図9】例えば、路面に連続する複数の段差があったときの車輪速度と車体速度との関係を示す特性図である。
【図10】図9の状態において、車輪加速度とサイクル時間と制御モードと推定ブレーキ液圧と目標ブレーキ液圧と増圧レートと減圧量との関係を示すタイムチャートである。
【発明を実施するための形態】
【0022】
本発明の実施形態について、適宜図面を参照しながら詳細に説明する。図1は、本発明の実施形態に係る車両用ブレーキ液圧制御装置が組み込まれた車両の構成図、図2は、前記車両用ブレーキ液圧制御装置の概略構成図である。
【0023】
図1に示すように、車両用ブレーキ液圧制御装置100は、車両CRの各車輪Tに付与される制動力(ブレーキ力)を適宜制御することが可能な装置である。この車両用ブレーキ液圧制御装置100は、基本的に、油路や各種部品が設けられる液圧ユニット10と、前記液圧ユニット10内の各種部品を適宜制御するための制御部(制御手段)20とによって構成されている。
【0024】
各車輪Tには、それぞれ車輪ブレーキFL、RR、RL、FRが設けられる。各車輪ブレーキFL、RR、RL、FRには、液圧源として機能するマスタシリンダMから供給される液圧により制動力を発生するホイールシリンダWが設けられている。前記マスタシリンダMとホイールシリンダWとは、それぞれ液圧ユニット10に接続されている。操作者によるブレーキペダルPの踏力に応じてマスタシリンダMで発生したブレーキ液圧は、制御部20及び液圧ユニット10で制御された後、ホイールシリンダWに供給される。
【0025】
制御部20には、マスタシリンダM内の液圧を検出する圧力センサ91と、各車輪Tの車輪速度を検出する車輪速センサ92とが接続されている。この制御部20は、例えば、図示しないCPU、RAM、ROM及び入出力回路等を備えており、圧力センサ91及び車輪速センサ92からの検出信号と、ROMに予め記憶されたプログラムやデータに基づいて各種演算処理を行うことによって、制御を実行する。なお、制御部20の詳細は、後記で説明する(図3参照)。
【0026】
図2に示すように、液圧ユニット10は、マスタシリンダMと車輪ブレーキFL、RR、RL、FRとの間に配置される。マスタシリンダMの一対の出力ポートM1、M2は、液圧ユニット10の入口ポート121に接続される。前記液圧ユニット10の出口ポート122は、各車輪ブレーキFL、RR、RL、FRに接続される。通常時には、液圧ユニット10内の入口ポート121から出口ポート122までが連通状態となり、ブレーキペダルPの踏力が各車輪ブレーキFL、RR、RL、FRに伝達されるようになっている。
【0027】
液圧ユニット10には、各車輪ブレーキFL、RR、RL、FRに対応して、4つの入口弁1、4つの出口弁2、及び、4つのチェック弁1aが設けられている。また、出力ポートM1、M2に対応して、2つの出力液圧路81、82、2つのリザーバ3、2つのポンプ4、2つのオリフィス5がそれぞれ設けられている。なお、2つのモータポンプ4をそれぞれ駆動するための電動モータ6が設けられている。
【0028】
入口弁1は、各車輪ブレーキFL、RR、RL、FRとマスタシリンダMとの間(各車輪ブレーキFL、RR、RL、FRの上流側)に配置された常開型比例電磁弁(ノーマルオープンタイプのリニアソレノイドバルブ)で構成される。入口弁1は、制御部20からの通電量によって、バルブ本体内に設けられた弁体の開弁量(リフト量)が調整可能に設けられている。入口弁1は、通常時に弁開状態となっていることで、マスタシリンダMから各車輪ブレーキFL、RR、RL、FRへブレーキ液圧が伝達されるのを許容している。
【0029】
また、入口弁1は、車輪Tがロックしそうになったときに制御部20により弁閉状態に切り換えられることで、ブレーキペダルPから各車輪ブレーキFL、RR、RL、FRへのブレーキ液圧の伝達が遮断される。さらに、入口弁1は、制御部20によって所定の閉弁力(開弁力)となるように制御されることで、各車輪ブレーキFL、RR、RL、FR内の液圧を所定の傾きで増加させる。
【0030】
出口弁2は、各車輪ブレーキFL、RR、RL、FRと各リザーバ3との間(入口弁1のホイールシリンダW側の液圧路からリザーバ3及びポンプ4に連通する液圧路上)に配置された常閉型の電磁弁(ノーマルクローズタイプのソレノイドバルブ)で構成される。出口弁2は、通常時に弁閉状態となっているが、車輪Tがロックしそうになったときに制御部20により弁開状態に切り換えられることで、各車輪ブレーキFL、RR、RL、FRに加わる液圧を各リザーバ3に逃がすことができる。
【0031】
チェック弁1aは、各入口弁1と並列に接続されている。このチェック弁1aは、各車輪ブレーキFL、RR、RL、FR側からマスタシリンダM側へのブレーキ液の流入のみを許容し、一方、マスタシリンダM側から各車輪ブレーキFL、RR、RL、FR側への流入を阻止するものである。ブレーキペダルPからの入力が解除された場合(例えば、操作者がブレーキペダルPから足を離した場合)、入口弁1が弁閉状態となっているときでも、各車輪ブレーキFL、RR、RL、FR側からマスタシリンダM側へのブレーキ液の流れが許容される。
【0032】
リザーバ3は、各出口弁2が弁開状態に切り換えられることによって逃がされるブレーキ液を吸収する機能を有する。
ポンプ4は、リザーバ3で貯留されているブレーキ液を吸入し、そのブレーキ液を、オリフィス5を介してマスタシリンダMへ戻す機能を有する。これにより、リザーバ3によるブレーキ液圧の吸収によって減圧された各出力液圧路81、82内の圧力状態が回復される。
【0033】
入口弁1及び出口弁2は、制御部20により弁開状態と弁閉状態とが切り換え制御されることで、各車輪ブレーキFL、RR、RL、FRのホイールシリンダW内における液圧(キャリパ圧ともいう)を制御する。例えば、入口弁1が弁開状態で出口弁2が弁閉状態となる通常状態では、操作者がブレーキペダルPを踏み込んでいれば、マスタシリンダMからの液圧がそのままホイールシリンダWへ伝達されて増圧状態となる。
【0034】
また、入口弁1が弁閉状態で出口弁2が弁開状態となれば、ホイールシリンダMからリザーバ3側へブレーキ液が流出して減圧状態となる。さらに、入口弁1と出口弁2とがそれぞれ弁閉状態となれば、キャリパ圧(ホイールシリンダW内の液圧)が保持される保持状態となる。さらにまた、入口弁1を所定の開弁量(リフト量)で弁開状態とした場合、ホイールシリンダW内の液圧が所定の傾きで徐々に増圧する増圧状態となる。
【0035】
この場合、制御部20は、各ホイールシリンダWで目標とする目標ブレーキ液圧(後記する)に対応して、前記増圧状態、減圧状態、保持状態を、それぞれ切り換えるべく、各入口弁1や各出口弁2に対して所定量の電流又は制御信号を出力する。
【0036】
次に、制御部20について、以下詳細に説明する。
図3は、制御部の概略構成ブロック図、図4(a)は、判定手段の構成ブロック図、図4(b)は、目標ブレーキ液圧算出手段の構成ブロック図である。
【0037】
図3に示すように、制御部20は、制御圧決定手段21、開弁量調整手段23、車輪加速度取得手段として機能する微分値算出手段24、減圧量算出手段25、記憶手段26、判定手段27、補正変数決定手段28、補正手段29、ブレーキ液圧取得手段30及び目標ブレーキ液圧算出手段31を備える。
【0038】
制御圧決定手段21は、車両の状態に応じて、キャリパ圧を増圧状態、減圧状態、保持状態のいずれにするのか、すなわち、ABS制御の停止状態から「増圧制御」、「保持制御」又は「減圧制御」のいずれの制御を行うかを決定する機能を有する。なお、図8は、制御モードの切り換えの一例を便宜的に示したものであり、一番下の位置がABS制御の停止状態となっており、前記ABS制御の停止の上段の位置が「増圧制御」、増圧制御の上段の位置が「保持制御」、前記保持制御の上段で一番上の位置が「減圧制御」となっている。
【0039】
具体的には、例えば、制御圧決定手段21は、車輪速センサ92で検出される車輪速度と、4つの車輪Tの車輪速度に基づいて推定される車体速度との速度比(スリップ率)が、所定値以上となり、且つ、車輪加速度が0以下であるときに車輪Tがロックしそうになったと判定して、減圧制御を行うことを決定する。なお、車輪加速度は、例えば、後記する微分値算出手段24によって車輪速度を微分演算することで算出される。
【0040】
また、制御圧決定手段21は、車輪加速度が0よりも大きいときに、保持制御を行うことを決定する。さらに、制御圧決定手段21は、スリップ率が所定値未満となり、且つ、車輪加速度が0より大きいとき、増圧制御を行うことを決定する。
【0041】
この制御圧決定手段21は、増圧制御を行うことを決定した場合、増圧開始信号を判定手段27に出力する。また、この制御圧決定手段21は、減圧制御を行うことを決定した場合、減圧開始信号を減圧量算出手段25に出力する。
【0042】
微分値算出手段24は、車輪速センサ92から車輪速度を取得し、前記取得した車輪速度を順次微分して、その微分値を車輪加速度として記憶手段26及び制御圧決定手段21に出力する機能を有する。ここで、「車輪速度の微分値」とは、図9に示す車輪速度の単位時間当たりの増減量(車輪速度特性曲線の傾き)、すなわち車輪加速度をいう。
【0043】
なお、本実施形態では、車輪速度が下がっていく場合にはマイナスの微分値が算出され、車輪速度が上がっていく場合にはプラスの微分値が算出されるものとする。この場合、プラスの微分値が算出されている間は、ロックしそうになった車輪の車輪速度が回復している状態を示し、微分値が大きくなる程、傾きが大きくなって、車輪速度が迅速に車体速度へ復帰していることを示している。微分値算出手段24で算出された複数の車輪加速度は、全て記憶手段26で記憶される。
【0044】
減圧量算出手段25は、制御圧決定手段21からの減圧開始信号を受け取ると、減圧制御中における出口弁2の駆動時間(累積した駆動時間)に基づいてキャリパ圧の減圧量(減圧開始時のキャリパ圧と増圧開始時のキャリパ圧との圧力差)を算出する機能を有する。なお、減圧量算出手段25で算出された減圧量は、記憶手段26に出力されて記憶される。
【0045】
記憶手段26は、上書き可能なRAM等で構成される記憶装置からなり、本実施形態では、算出された後記する目標ブレーキ液圧等が上書き可能な状態で記憶されている。
【0046】
判定手段27は、図4(a)に示すように、第1サイクル時間判定手段27Aと、車輪加速度判定手段27Bとから構成される。
【0047】
第1サイクル時間判定手段27Aは、後記するように、前回の増圧制御の開始時点から今回の増圧制御の開示時点までのサイクル時間が第1の所定時間以内にあるか否かを判定する機能を有する。第1サイクル時間判定手段27Aは、前記サイクル時間が第1の所定時間以内にあると判定した場合、そのことを示す所定の信号を補正変数決定手段28に出力する。
【0048】
車輪加速度判定手段27Bは、減圧制御の開始時点から次回の増圧制御の開始時点までの時間のうち、少なくとも車輪速度が増加傾向となる時間内の車輪加速度(プラスの微分値)の最大値を取得し、前記車輪加速度の最大値が所定値以上であるか否かを判定する機能を有する。車輪加速度判定手段27Bは、前記車輪加速度の最大値が所定値以上であると判定した場合、そのことを示す所定の信号を補正変数決定手段28に出力する。
【0049】
補正変数決定手段28は、判定手段27から各所定の信号を受けたことを条件として、後記する目標ブレーキ液圧算出手段31によって算出された目標ブレーキ液圧及び記憶手段26に記憶されたデータ及びマップ等に基づいて、入口弁1に供給する通電量を補正するための補正増圧レート(単位時間当たりの補正量)及び補正時間を決定する機能を有する。補正変数決定手段28は、決定された補正増圧レート及び補正時間のデータを補正手段29に出力する。なお、補正増圧レート及び補正時間は、後記するように、図5に示すフローチャート(ステップS7)で詳細に説明する。また、入口弁1に供給する通電量と入口弁1の開弁量とは、相関関係があるものとする。
【0050】
ブレーキ液圧取得手段30は、各車輪ブレーキFL、RR、RL、FR内の推定ブレーキ液圧を取得する。この推定ブレーキ液圧は、公知の手法で算出されるキャリパ圧からなり、例えば、圧力センサ91で検出されたマスタシリンダ圧と、制御圧決定手段21で決定された入口弁1及び出口弁2の開閉状態に基づいて算出(推定)されるキャリパ圧である。ブレーキ液圧取得手段30で取得された推定ブレーキ液圧は、基本目標ブレーキ液圧算出手段31Bに出力されると共に、記憶手段26に出力されて記憶される。
【0051】
なお、本実施形態では、ブレーキ液圧取得手段30で取得されるブレーキ液圧を、推定ブレーキ液圧として以下説明しているが、これに限定されるものではなく、例えば、図示しないセンサを用いて各車輪ブレーキFL、RR、RL、FR内の実際のブレーキ液圧を検出したものであってもよい。
【0052】
目標ブレーキ液圧算出手段31は、各車輪ブレーキFL、RR、RL、FR内の目標となるブレーキ液圧を算出する機能を有し、図4(b)に示すように、第2サイクル時間判定手段31Aと、基本目標ブレーキ液圧算出手段31Bと、補正目標ブレーキ液圧算出手段31Cとから構成される。
【0053】
第2サイクル時間判定手段31Aは、目標ブレーキ液圧を算出する際、前回の増圧制御の開始時点から今回の増圧制御の開示時点までのサイクル時間が第2の所定時間以内にあるか否かを判定する機能を有する。第2サイクル時間判定手段31Aは、前記サイクル時間が第2の所定時間以内にあると判定した場合、そのことを示す所定の信号を補正変数決定手段28に出力する。なお、第1サイクル時間判定手段27Aにおける第1の所定時間と、第2サイクル時間判定手段31Aにおける第2の所定時間とは、本実施形態では同一の値であるものとして説明するが(図10中の1点鎖線参照)、異なる値であってもよい。
【0054】
基本目標ブレーキ液圧算出手段31Bは、前回の減圧制御の開始時点においてブレーキ液圧取得手段30で取得された推定ブレーキ液圧(ロック液圧)に基づいて基本目標ブレーキ液圧を算出する機能を有する。基本目標ブレーキ液圧算出手段31Bで算出された基本目標ブレーキ液圧は、補正変数決定手段28に出力される。
【0055】
補正目標ブレーキ液圧算出手段31Cは、目標ブレーキ液圧の前回値を所定量だけオフセット(補正オフセット)させた値である補正目標ブレーキ液圧を算出する機能を有する。このオフセットとは、増圧制御又は減圧制御におけるブレーキ液圧の増減があまりにも過敏になるのを回避するため、前回の目標ブレーキ液圧値から所定量だけ下げる補正を行うものである。補正目標ブレーキ液圧算出手段31Cで算出された補正目標ブレーキ液圧は、補正変数決定手段28に出力される。
【0056】
補正手段29は、比較手段29Aと通電量変更手段29Bとを備えており、補正変数決定手段28から送られてくる補正変数(補正増圧レート及び補正時間)に基づいて、補正時間の間、増圧制御時における所定の増圧レートを補正する機能を有する。
【0057】
比較手段29Aは、補正変数決定手段28から送られてくる補正増圧レートを受け取ると、この補正増圧レートが所定の増圧レート以上であるか否かを判断する機能を有する。比較手段29Aは、補正増圧レートが所定の増圧レート以上であると判断した場合に補正増圧レートを通電量変更手段29Bに出力し、一方、補正増圧レートが所定の増圧レート未満であると判断した場合に所定の増圧レートを通電量変更手段29Bに出力する。
【0058】
通電量変更手段29Bは、比較手段29Aから補正増圧レートを受け取った場合、この補正増圧レートに対応する電流値を算出し、その電流値を開弁量調整手段23に出力する機能を有する。開弁量調整手段23では、通電量変更手段29Bから補正された電流値が送られてきた場合、算出した電流値を補正された電流値に置き換えて入口弁1の通電制御(増圧制御)を行う。
【0059】
以上のように構成される制御部20は、図5に示すフローチャートに基づいて入口弁1の開弁制御(増圧制御)を行う。以下に、制御部20による入口弁1の開弁制御について説明する。なお、図5に示すフローチャートは、ABS制御が開始された後に開始される。また、制御圧決定手段21が減圧状態又は保持状態を決定した場合、制御部20は、減圧制御又は保持制御を実行する。
【0060】
先ず、制御部20は、目標ブレーキ液圧を算出する(ステップS1)。この目標ブレーキ液圧の算出は、図6に示すサブルーチンフローチャートに沿って実行される。以下、図6に基づいて説明する。
【0061】
制御部20は、制御圧決定手段21がキャリパ圧を減圧状態又は保持状態から増圧状態にすることを決定したか否か、すなわち、減圧状態又は保持状態から増圧状態に移行したか否かを判断する(ステップS101)。ここで、移行の判断は、例えば、制御圧決定手段21が前回決定した制御モードが減圧制御又は保持制御であり、今回決定した制御モードが増圧制御である場合に、移行したと判断する(ステップS1→Yes)。一方、今回の制御モードが減圧制御又は保持制御である場合、並びに、前回及び今回の両方がともに増圧制御である場合には、移行していないと判断する(ステップS101→No)。なお、ステップS101で「No;移行していない」と判断された場合、前回の目標ブレーキ液圧を取得し、この取得された前回の目標ブレーキ液圧をそのまま目標ブレーキ圧とする(ステップS110)。
【0062】
制御部20は、ステップ101で増圧状態に移行したと判断した後、前回の増圧開始時間から今回の増圧開始時間までのサイクル時間(図8参照)を取得する(ステップS102)。このサイクル時間は、例えば、図示しないタイマ回路によって計測される。
【0063】
続いて、制御部20の第2サイクル時間判定手段31Aは、このサイクル時間が予め記憶手段26に記憶された第2の所定時間以内か否かを判断する(ステップS103)。第2サイクル時間判定手段31Aにおいて、サイクル時間が第2の所定時間以内であると判断された場合(ステップS103→Yes)、すなわち、後記する車輪振動状態にあると推定される場合、補正目標ブレーキ液圧算出手段31Cは、前回の目標ブレーキ液圧を取得し(ステップS104)、この前回の目標ブレーキ液圧から補正オフセットを減算した補正目標ブレーキ液圧を算出する(ステップS105、S106)。この結果、制御部20は、記憶手段26に記憶されている目標ブレーキ液圧を補正目標ブレーキ液圧に上書きする。
【0064】
一方、制御部20の第2サイクル時間判定手段31Aにより、ステップS103において、サイクル時間が第2の所定時間を越えていると判断された場合(ステップS103→No)、すなわち、後記する車輪振動状態にないものと推定される場合、基本目標ブレーキ液圧算出手段31Bは、前回のロック液圧、すなわち、前回の減圧制御の開始時点のブレーキ液圧値を取得し(ステップS107)、この前回のロック液圧から基本オフセットを減算した基本目標ブレーキ液圧を算出する(ステップS108、S109)。
【0065】
このようにして得られた目標ブレーキ液圧(前回の目標ブレーキ液圧値、補正目標ブレーキ液圧値、又は、基本目標ブレーキ液圧値のいずれか)は、記憶手段26に記憶され、適宜、上書きされると共に、補正変数決定手段28に出力される。
【0066】
次に、図5のメインルーチンに戻って、制御部20は、記憶手段26から所定の増圧レートを取得する(ステップS2)。この所定の増圧レートは、記憶手段26に予め記憶されているものであり、例えば、実験等によって得られたデータ又はマップ等によって構成される。
【0067】
続いて、制御部20は、キャリパ圧が減圧状態又は保持状態から増圧状態に移行したか否かを判断する(ステップS3)。このステップS3における増圧状態に移行したか否かの判断は、目標ブレーキ液圧の算出におけるステップS101と同様である。
【0068】
ステップS3において、制御部20は、制御圧決定手段21がキャリパ圧を減圧状態又は保持状態から増圧状態にすることを決定した、すなわち、増圧状態に移行したと判断した場合(ステップS3→Yes)、車輪加速度判定手段27Bで演算された車輪加速度の最大値と、前回の増圧制御の開始時間から今回の増圧制御の開始時間までのサイクル時間(図8参照)を取得する(ステップS4)。
【0069】
制御部20の第1サイクル時間判定手段27A及び車輪加速度判定手段27Bは、前記ステップS4で取得した車輪加速度の最大値が所定値以上であり、且つ、サイクル時間が第1の所定時間以内であるか否かを判断する(ステップS5)。
【0070】
ステップS5において、第1サイクル時間判定手段27A及び車輪加速度判定手段27Bは、車輪加速度の最大値が所定値以上であり、且つ、サイクル時間が第1の所定時間以内であると判断した場合(ステップS5→Yes)、すなわち、後記する車輪振動状態が発生しており、且つ、車輪速度が車体速度に急速に復帰していると推定される場合、ステップS1で求められた目標ブレーキ液圧(この場合は、3種類の目標ブレーキ液圧のうちの補正目標ブレーキ液圧)を取得すると共に、今回の増圧開始時における推定ブレーキ液圧を取得する(ステップS6)。さらに、目標ブレーキ液圧(補正目標ブレーキ液圧)と推定ブレーキ液圧との差(差分)に基づいて補正変数(補正増圧レート及び補正時間)を算出する(ステップS7)。
【0071】
ここで、補正変数の設定の一例を図7に基づいて説明する。
図7において、横軸に目標ブレーキ液圧と推定ブレーキ液圧との差分をとり、一側の縦軸に補正増圧レートをとり、他側の縦軸に補正時間をとっている。
【0072】
この場合、記憶手段26には、目標ブレーキ液圧と推定ブレーキ液圧との差分に対応する補正増圧レートがデータ又はマップ等で記憶されており、目標ブレーキ液圧と推定ブレーキ液圧との差分が算出されると、前記差分に対応する補正増圧レートが決定される。また、本実施形態において、補正時間は、目標ブレーキ液圧と推定ブレーキ液圧との差に拘わらず、所定時間(一定)に設定されているが、これに限定されるものではなく、補正時間が可変となるように設定されていてもよい。なお、補正時間が可変となる場合の一例としては、目標ブレーキ液圧と推定ブレーキ液圧との差分が大きくなるのに対応して、補正時間を徐々に大きく設定することが挙げられる。
【0073】
このようにして、補正増圧レートと補正時間によって補正変数が設定され、設定された補正変数に基づき開弁量調整手段23によって入口弁1の開弁量が増圧制御される。
【0074】
一方、ステップS5において、車輪加速度の最大値が所定値未満であり、且つ、サイクル時間が第1の所定時間を越える場合、車輪加速度の最大値が所定値以上であるがサイクル時間が第1の所定時間を越える場合、又は、車輪加速度の最大値が所定値未満であってサイクル時間が第1の所定時間以内である場合のいずれかの場合(ステップS5→No)、補正増圧レートを算出することがなく、所定の増圧レートのまま、後記するステップS11に進む。
【0075】
次に、ステップS3において、増圧状態に移行していないと判断される場合について説明する。
制御部20は、制御モードが、減圧制御、保持制御、又は、前回及び今回の制御モードが共に増圧制御となっている場合、増圧状態に移行していないと判断し(ステップS3→No)、ステップS8に進む。
【0076】
このステップS8では、補正時間の残りが0となっているか否かを判断し、補正時間が0であると判断された場合(ステップS8→Yes)、ステップ11に進む。なお、ステップS8で「Yes」となるのは、後記するステップS10で補正時間がカウントダウンされた結果、補正時間が0になっている場合と、ステップS5で「No」と判定されて、補正時間が設定されていない場合(すなわち、補正時間が初期値0のままである場合)である。一方、補正時間の残りが0でなく未だ残っている場合(ステップS8→No)、未だ補正変数を用いた増圧状態が継続しているため、ステップS2で取得された補正増圧レート及び補正時間で構成される所定の増圧レートで補正し(ステップS9)、残存する補正時間だけカウントダウンされる(ステップS10)。
【0077】
ステップS11では、算出された補正増圧レートが予め設定された所定の増圧レート以上であるか否かが比較手段29Aで比較され、補正増圧レートが所定の増圧レート以上である場合(ステップS11→Yes)、比較手段29Aから補正増圧レートが出力される(ステップS12)。この場合、通電量変更手段29Bによって補正増圧レートに対応するように入口弁1に対する通電量が変更され、開弁量調整手段23により入口弁の開弁量が増圧制御される。
【0078】
これに対し、補正増圧レートが所定の増圧レート未満である場合(ステップS11→No)、比較手段29Aから所定の増圧レートが出力される。この場合、通電量変更手段29Bによって所定の増圧レートに対応するように入口弁1に対する通電量が変更され、開弁量調整手段23により入口弁1の開弁量が制御される。但し、ステップS5やステップS8で「No」と判断されて補正増圧レートが設定されなかった場合は、補正増圧レートは0であるものと看做してステップS11における判断を行うものとする。
【0079】
このように本実施形態では、補正手段29を構成する比較手段29Aにおいて、補正増圧レートと所定の増圧レートとを比較し、所定の補正レートよりも補正増圧レートが大きい場合にのみ、補正が行われる。この結果、本実施形態では、所定の補正レートが補正増圧レートよりも大きい場合に補正増圧レートが不要となり、補正増圧レートによってブレーキ液圧を迅速に減速制御に復帰させる場合にのみ増圧補正レート処理を適用することができる。
【0080】
次に、車輪振動状態における制御部20の制御動作を図9及び図10に基づいて説明する。図9は、例えば、路面に連続する複数の段差があったときの車輪速度と車体速度との関係を示す特性図、図10は、図9の状態において、車輪加速度とサイクル時間と制御モードと推定ブレーキ液圧と目標ブレーキ液圧と増圧レートと減圧量との関係を示すタイムチャートである。
【0081】
なお、図10中では、車輪加速度を太線実線で示し、車輪加速度の最大値a1〜a3を太線破線で示している。この車輪加速度の最大値a1〜a3は、制御モードが減圧制御及び保持制御にあるときの車輪加速度の最大値を保持して得られる値であり、次回の減圧制御のときに「0」にリセットされる。この車輪加速度の最大値a1〜a3は、増圧制御の開始時点において、予め設定された車輪加速度判定閾値以上か否かの判断に用いられる。
【0082】
例えば、車両が走行する路面に連続する複数の段差があったときに、操作者がブレーキペダルPを踏み込んで車輪に制動力を付与して車体速度を減速させた場合、車輪が段差を乗り越えて着地する前に空中に浮いた状態となるため、制動力を付与された車輪がロックしそうになり、その結果、制御部20によるABS制御が開始される(図10の時刻t1参照)。
【0083】
ABS制御が開始されると、制御部20によって制御モードが減圧制御に切り換えられ、時刻t1から時刻t2の間で推定ブレーキ液圧(制御液圧)を減少させる減圧制御が実行され、続いて、時刻t2から時刻t3の間で保持制御が実行される。また、時刻t4から時刻t6の間、及び、時刻t7から時刻t9の間には、2回目以降の減圧制御及び保持制御がそれぞれ実行されるが、第1回目の減圧制御と比較して、減圧量がより一層小さくなっている。
【0084】
第1回目の減圧制御及び保持制御が実行された後、時刻t3から時刻t4の間で第1回目の増圧制御が実行され、時刻t4から時刻t6の間で第2回目の減圧制御及び保持制御がなされた後、時刻t6から時刻t7の間でさらに第2回目の増圧制御(前回の増圧制御)が実行される。さらに、時刻t7から時刻t9の間で第3回目の減圧制御及び保持制御がなされた後、時刻t9を開始時点として第3回目の増圧制御(今回の増圧制御)が実行される。
【0085】
この場合、時刻t3から開始される第1回目の増圧制御では、基本目標ブレーキ液圧を目標ブレーキ液圧とし、時刻t6から開始される第2回目の増圧制御及び時刻t9から開始される第3回目の増圧制御では、それぞれ、時刻t3から時刻t6までの時間、時刻t6から時刻t9までの時間であるサイクル時間が第2の所定時間以内となっているため、補正目標ブレーキ液圧を目標ブレーキ液圧として設定される。
【0086】
時刻t3から時刻t4の間において、大きな減圧量に対応して増圧レートを大幅に上昇させた補正が、補正手段29とは別個の補正手段によって、例えば、特開2009−23465号公報に開示された方法で行われる。また、時刻t6から時刻t7の間では、補正手段29により所定の増圧レートで、小さな減圧量に対応して増圧量が小さい補正が行われる。第2回目の増圧制御が開始される時刻t6では、車輪加速度の最大値a2が車輪加速度判定閾値を下回っているため、補正増圧レートによる補正が実行されない。
【0087】
時刻t9から時刻t10の間では、さらに第3回目の増圧制御(今回の増圧制御)が実行されるが、その際、補正手段29は、時刻t7から時刻t8の間の減圧制御による減圧量が小さいにも拘わらず、所定の増圧レートではなく、図7で求めた補正増圧レートに基づいて増圧補正することにより、時刻t9におけるブレーキ推定液圧の立ち上がりを急激(傾きを大きく)とすることができる。
【0088】
換言すると、第3回目の増圧制御が実行される時刻t9の時点では、車輪加速度の最大値a3が車輪加速度判定閾値以上となっており、且つ、サイクル時間が第1の所定時間以内となっているため、車輪が振動している状態(車輪振動状態)にあり、且つ、車輪速度が車体速度に急速に復帰していると推定され、補正時間内で補正増圧レートによる補正が実行される。
【0089】
この結果、本実施形態では、車輪振動状態にあり、且つ、車輪速度が車体速度に急速に復帰していると推定される場合、減圧制御による減圧量が小さいにも拘わらず、ブレーキ液圧を増圧補正することにより、ブレーキ液圧を迅速に復帰させることができる。なお、時刻t6から時刻t9までの時間がサイクル時間となり、今回の増圧制御の開始時点である時刻t9における目標ブレーキ液圧と推定ブレーキ液圧との差分に基づいて補正増圧レートが算出される。
【0090】
これに対し、時刻t9における今回の増圧制御を、仮に、補正増圧レートではなく、所定の増圧レートに基づいて補正した場合、図10中の細線破線で示すように増圧量の小さい増圧レートとなり、また、推定ブレーキ液圧は、図10中の太線二点鎖線で示すように緩やかな立ち上がりとなるため、減速度復帰に時間が要する。
【0091】
本実施形態では、サイクル時間が第1の所定時間以内のとき、すなわち、路面に連続する複数の段差があったり、路面がうねっていたり、悪路であったり、インギアによる駆動系の振動が発生していたりすることで、減圧制御が短時間だけ行われる車輪振動状態と推定されるときであって、且つ、車輪速度が車体速度に急速に復帰していると推定される、車輪加速度の最大値が所定値以上のとき、補正手段29が補正時間内において補正増圧レートで補正することができる。このため、本実施形態では、減圧制御時に減圧量が少ない状況であっても、ブレーキ液圧を迅速に復帰させることができる。なお、ブレーキ液圧取得部30が取得するブレーキ液圧は、車輪ブレーキ内の実際のブレーキ液圧であってもよいし、又は、推定された推定ブレーキ液圧のいずれであってもよい。
【0092】
また、本実施形態では、サイクル時間が第2の所定時間以内のときに車輪振動状態にあると推定し、目標ブレーキ液圧を前回の減圧制御の開始時点(時刻t7)のブレーキ液圧(ロック液圧)に基づいて小さくなりすぎないようにすることができるので、ブレーキ液圧と目標ブレーキ液圧との差(差分)を有効に利用して補正することができる。なお、本実施形態では、第2の所定時間が第1の所定時間と同一値であるものとして説明したが、異なる値であってあってもよい。
【0093】
さらに、本実施形態では、補正時間中に補正増圧レートで増圧制御されることで発生する増圧量が目標ブレーキ液圧に到達するように、補正増圧レート及び補正時間を決定(設定)することができる。この結果、本実施形態では、補正増圧レート及び補正時間を、車両用ブレーキ液圧制御装置の増圧特性や車両環境等によって適宜バランスさせることができる。
【0094】
さらにまた、本実施形態では、ブレーキ液圧と目標ブレーキ液圧との差が大きいほど補正増圧レートを大きく設定することができるため、ブレーキ液圧と目標ブレーキ液圧との差が大きい場合でも、ブレーキ液圧を迅速に復帰させることができる。
【0095】
またさらに、本実施形態では、補正時間を変更しないで増圧補正レートのみを可変させることによりブレーキ液圧を迅速に復帰させることができ、補正増圧レートの設定を簡便に遂行することができる。
【0096】
またさらに、本実施形態では、所定の増圧レートが補正増圧レートよりも大きい場合、補正増圧レートを用いることがないため、補正増圧レートによってブレーキ液圧を迅速に復帰させることができる場合にのみ、本補正を適用することができる。
【符号の説明】
【0097】
1 入力弁(常開型比例電磁弁)
2 出力弁(常閉型電磁弁)
20 制御部(制御手段)
23 開弁量調整手段
27A 第1サイクル時間判定手段
27B 車輪加速度判定手段
28 補正変数決定手段
29 補正手段
30 ブレーキ液圧取得手段
31 目標ブレーキ液圧算出手段
31A 第2サイクル時間判定手段
31B 基本目標ブレーキ液圧算出手段
31C 補正目標ブレーキ液圧算出手段
【特許請求の範囲】
【請求項1】
液圧源と車輪ブレーキとの間に介装される常開型比例電磁弁と、車輪ブレーキ内のブレーキ液圧を逃がす常閉型電磁弁と、前記常開型比例電磁弁及び前記常閉型電磁弁を制御して前記車輪ブレーキ内のブレーキ液圧の増圧制御、保持制御又は減圧制御を行う制御手段と、を有する車両用ブレーキ液圧制御装置であって、
前記制御手段は、
前記増圧制御中、前記ブレーキ液圧が所定の増圧レートで増圧されるように前記常開型比例電磁弁の開弁量を制御する開弁量制御手段と、
前回の増圧制御の開始時点から今回の増圧制御の開始時点までのサイクル時間が第1の所定時間以内であるか否かを判定する第1サイクル時間判定手段と、
前記減圧制御の開始時点から次回の増圧制御の開始時点までの時間のうち少なくとも車輪速度が増加傾向となる時間内の車輪加速度を取得し、前記車輪加速度が所定値以上であるか否かを判定する車輪加速度判定手段と、
前記車輪ブレーキ内のブレーキ液圧を取得するブレーキ液圧取得手段と、
前記車輪ブレーキ内の目標ブレーキ液圧を算出する目標ブレーキ液圧算出手段と、
前記第1サイクル時間判定手段で前記サイクル時間が前記第1の所定時間以内であると判定され、且つ、前記車輪加速度判定手段で前記車輪加速度が所定値以上であると判定されたことを条件として、前記ブレーキ液圧取得手段により取得された今回の増圧制御の開始時点におけるブレーキ液圧と前記目標ブレーキ液圧との差に基づいて補正増圧レート及び補正時間を決定する補正変数決定手段と、
前記補正時間の間、前記開弁量を、前記車輪ブレーキ内のブレーキ液圧が前記補正増圧レートで増圧されるように補正する補正手段と、
を備えることを特徴とする車両用ブレーキ液圧制御装置。
【請求項2】
請求項1に記載の車両用ブレーキ液圧制御装置において、
前記制御手段は、前回の増圧制御の開始時点から今回の増圧制御の開始時点までのサイクル時間が第2の所定時間以内であるか否かを判定する第2サイクル時間判定手段を備え、
前記目標ブレーキ液圧算出手段は、
前回の減圧制御の開始時点において前記ブレーキ液圧取得手段により取得されたブレーキ液圧に基づいて基本目標ブレーキ液圧を算出する基本目標ブレーキ液圧算出手段と、
前記目標ブレーキ液圧の前回値を所定量だけオフセットさせた補正目標ブレーキ液圧を算出する補正目標ブレーキ液圧算出手段と、を有し、
前記第2サイクル時間判定手段で前記サイクル時間が第2の所定時間以内であると判定された場合には、前記基本目標ブレーキ液圧に代えて、前記補正目標ブレーキ液圧を前記目標ブレーキ液圧とすることを特徴とする車両用ブレーキ液圧制御装置。
【請求項3】
請求項1又は2に記載の車両用ブレーキ液圧制御装置において、
前記補正変数決定手段は、前記ブレーキ液圧取得手段により取得されたブレーキ液圧と前記目標ブレーキ液圧との差が前記補正時間内に0又は0に近づくように、前記補正増圧レート及び前記補正時間を決定することを特徴とする車両用ブレーキ液圧制御装置。
【請求項4】
請求項1乃至3のいずれか1項に記載の車両用ブレーキ液圧制御装置において、
前記補正変数決定手段は、前記ブレーキ液圧取得手段により取得されたブレーキ液圧と前記目標ブレーキ液圧との差が大きいほど前記補正増圧レートが大きくなるように前記補正増圧レートを決定することを特徴とする車両用ブレーキ液圧制御装置。
【請求項5】
請求項4に記載の車両用ブレーキ液圧制御装置において、
前記補正変数決定手段は、前記ブレーキ液圧取得手段により取得されたブレーキ液圧と前記目標ブレーキ液圧との差に拘わらず、前記補正時間を一定の時間に決定することを特徴とする車両用ブレーキ液圧制御装置。
【請求項6】
請求項1乃至5のいずれか1項に記載の車両用ブレーキ液圧制御装置において、
前記補正手段は、前記所定の増圧レートよりも前記補正増圧レートの方が大きい場合にのみ、前記補正を行うことを特徴とする車両用ブレーキ液圧制御装置。
【請求項1】
液圧源と車輪ブレーキとの間に介装される常開型比例電磁弁と、車輪ブレーキ内のブレーキ液圧を逃がす常閉型電磁弁と、前記常開型比例電磁弁及び前記常閉型電磁弁を制御して前記車輪ブレーキ内のブレーキ液圧の増圧制御、保持制御又は減圧制御を行う制御手段と、を有する車両用ブレーキ液圧制御装置であって、
前記制御手段は、
前記増圧制御中、前記ブレーキ液圧が所定の増圧レートで増圧されるように前記常開型比例電磁弁の開弁量を制御する開弁量制御手段と、
前回の増圧制御の開始時点から今回の増圧制御の開始時点までのサイクル時間が第1の所定時間以内であるか否かを判定する第1サイクル時間判定手段と、
前記減圧制御の開始時点から次回の増圧制御の開始時点までの時間のうち少なくとも車輪速度が増加傾向となる時間内の車輪加速度を取得し、前記車輪加速度が所定値以上であるか否かを判定する車輪加速度判定手段と、
前記車輪ブレーキ内のブレーキ液圧を取得するブレーキ液圧取得手段と、
前記車輪ブレーキ内の目標ブレーキ液圧を算出する目標ブレーキ液圧算出手段と、
前記第1サイクル時間判定手段で前記サイクル時間が前記第1の所定時間以内であると判定され、且つ、前記車輪加速度判定手段で前記車輪加速度が所定値以上であると判定されたことを条件として、前記ブレーキ液圧取得手段により取得された今回の増圧制御の開始時点におけるブレーキ液圧と前記目標ブレーキ液圧との差に基づいて補正増圧レート及び補正時間を決定する補正変数決定手段と、
前記補正時間の間、前記開弁量を、前記車輪ブレーキ内のブレーキ液圧が前記補正増圧レートで増圧されるように補正する補正手段と、
を備えることを特徴とする車両用ブレーキ液圧制御装置。
【請求項2】
請求項1に記載の車両用ブレーキ液圧制御装置において、
前記制御手段は、前回の増圧制御の開始時点から今回の増圧制御の開始時点までのサイクル時間が第2の所定時間以内であるか否かを判定する第2サイクル時間判定手段を備え、
前記目標ブレーキ液圧算出手段は、
前回の減圧制御の開始時点において前記ブレーキ液圧取得手段により取得されたブレーキ液圧に基づいて基本目標ブレーキ液圧を算出する基本目標ブレーキ液圧算出手段と、
前記目標ブレーキ液圧の前回値を所定量だけオフセットさせた補正目標ブレーキ液圧を算出する補正目標ブレーキ液圧算出手段と、を有し、
前記第2サイクル時間判定手段で前記サイクル時間が第2の所定時間以内であると判定された場合には、前記基本目標ブレーキ液圧に代えて、前記補正目標ブレーキ液圧を前記目標ブレーキ液圧とすることを特徴とする車両用ブレーキ液圧制御装置。
【請求項3】
請求項1又は2に記載の車両用ブレーキ液圧制御装置において、
前記補正変数決定手段は、前記ブレーキ液圧取得手段により取得されたブレーキ液圧と前記目標ブレーキ液圧との差が前記補正時間内に0又は0に近づくように、前記補正増圧レート及び前記補正時間を決定することを特徴とする車両用ブレーキ液圧制御装置。
【請求項4】
請求項1乃至3のいずれか1項に記載の車両用ブレーキ液圧制御装置において、
前記補正変数決定手段は、前記ブレーキ液圧取得手段により取得されたブレーキ液圧と前記目標ブレーキ液圧との差が大きいほど前記補正増圧レートが大きくなるように前記補正増圧レートを決定することを特徴とする車両用ブレーキ液圧制御装置。
【請求項5】
請求項4に記載の車両用ブレーキ液圧制御装置において、
前記補正変数決定手段は、前記ブレーキ液圧取得手段により取得されたブレーキ液圧と前記目標ブレーキ液圧との差に拘わらず、前記補正時間を一定の時間に決定することを特徴とする車両用ブレーキ液圧制御装置。
【請求項6】
請求項1乃至5のいずれか1項に記載の車両用ブレーキ液圧制御装置において、
前記補正手段は、前記所定の増圧レートよりも前記補正増圧レートの方が大きい場合にのみ、前記補正を行うことを特徴とする車両用ブレーキ液圧制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−166590(P2012−166590A)
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願番号】特願2011−26841(P2011−26841)
【出願日】平成23年2月10日(2011.2.10)
【出願人】(000226677)日信工業株式会社 (840)
【Fターム(参考)】
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願日】平成23年2月10日(2011.2.10)
【出願人】(000226677)日信工業株式会社 (840)
【Fターム(参考)】
[ Back to top ]