
車両用ブレーキ液圧制御装置
【課題】走行ラインのトレース性を向上させることができる車両用ブレーキ液圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ液圧制御装置は、車体速度と車輪速度とを用いて算出するスリップ関連量が減圧閾値に達したことを条件として、車輪ブレーキに付与するブレーキ液圧を減圧するアンチロックブレーキ制御を実行するアンチロックブレーキ制御手段と、舵角に基づいて車両が旋回しているか否かを判定する旋回判定手段を備える。アンチロックブレーキ制御手段は、アンチロックブレーキ制御を実行する際に、旋回判定手段によって車両が旋回していると判定された場合には、減圧閾値を直進時の減圧閾値Sf1,Sr1よりも減圧しやすい値Sf2,Sr2に変更し、かつ、ブレーキ液圧の減圧量を直進時の減圧量Pf1,Pr1よりも大きな値Pf2,Pr2に変更する旋回減圧制御を実行する。
【解決手段】車両用ブレーキ液圧制御装置は、車体速度と車輪速度とを用いて算出するスリップ関連量が減圧閾値に達したことを条件として、車輪ブレーキに付与するブレーキ液圧を減圧するアンチロックブレーキ制御を実行するアンチロックブレーキ制御手段と、舵角に基づいて車両が旋回しているか否かを判定する旋回判定手段を備える。アンチロックブレーキ制御手段は、アンチロックブレーキ制御を実行する際に、旋回判定手段によって車両が旋回していると判定された場合には、減圧閾値を直進時の減圧閾値Sf1,Sr1よりも減圧しやすい値Sf2,Sr2に変更し、かつ、ブレーキ液圧の減圧量を直進時の減圧量Pf1,Pr1よりも大きな値Pf2,Pr2に変更する旋回減圧制御を実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用ブレーキ液圧制御装置に関し、詳しくはアンチロックブレーキ制御を実行可能な車両用ブレーキ液圧制御装置に関する。
【背景技術】
【0002】
従来、車両用ブレーキ液圧制御装置として、車両の旋回制動時には、直進制動時よりも目標スリップ率を低下させることで、車両の横滑りを抑えて操舵性を向上させるものが知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開昭62−253560号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術では、旋回制動時において目標スリップ率のみを低下させていることから、走行ラインのトレース性を十分に満足させることができなかった。
【0005】
そこで、本発明は、走行ラインのトレース性を向上させることができる車両用ブレーキ液圧制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記課題を解決する本発明は、車体速度と車輪速度とを用いて算出するスリップ関連量が減圧閾値に達したことを条件として、車輪ブレーキに付与するブレーキ液圧を減圧するアンチロックブレーキ制御を実行するアンチロックブレーキ制御手段を有する車両用ブレーキ液圧制御装置において、舵角に基づいて車両が旋回しているか否かを判定する旋回判定手段を備え、前記アンチロックブレーキ制御手段は、アンチロックブレーキ制御を実行する際に、前記旋回判定手段によって車両が旋回していると判定された場合には、前記減圧閾値を直進時の減圧閾値よりも減圧しやすい側に変更し、かつ、ブレーキ液圧の減圧量を直進時の減圧量よりも大きくするように変更する旋回減圧制御を実行することを特徴とする。
【0007】
この構成によれば、車両が旋回している場合には、減圧閾値を直進時よりも減圧しやすい側に変更することで減圧するタイミングを早めるとともに、さらに減圧量を直進時よりも大きくすることで車輪速度をいち早く車体速度に近づけることができるので、大きな旋回力を発生させることができ、これによって走行ラインのトレース性を向上させることができる。
【0008】
また、前記した構成において、車両がアンダーステア状態、ニュートラルステア状態、オーバーステア状態のいずれであるかを判定する旋回状態判定手段をさらに備える場合には、前記アンチロックブレーキ制御手段は、前記旋回状態判定手段によってアンダーステア状態であると判定されている場合には、前輪のみに対して前記旋回減圧制御を実行し、前記旋回状態判定手段によってニュートラルステア状態であると判定されている場合には、前輪および後輪に対して前記旋回減圧制御を実行し、前記旋回状態判定手段によってオーバーステア状態であると判定されている場合には、後輪のみに対して前記旋回減圧制御を実行するのが望ましい。
【0009】
これによれば、車両の旋回状態に応じて旋回減圧制御を行う対象となる車輪を切り替えるので、車両の安定性を向上させながら大きな旋回力を発生させて走行ラインのトレース性を向上させることができる。
【0010】
また、前記した構成において、アンダーステア状態であるときに前輪のみに対して実行する旋回減圧制御では、前記減圧閾値が、ニュートラルステア状態であるときの前輪の減圧閾値よりも減圧しやすい側に設定されるとともに、前記減圧量が、ニュートラルステア状態であるときの前輪の減圧量よりも大きくなるように設定されているのが望ましい。
【0011】
これによれば、アンダーステア状態のときに前輪の減圧閾値および減圧量を変更する量をニュートラルステア状態のときよりも大きくすることで、前輪により大きな旋回力が発生するので、アンダーステア状態を解消しながら走行ラインのトレース性を向上させることができる。
【0012】
また、前記した構成において、アンダーステア状態であるときに前輪のみに対して実行する旋回減圧制御では、旋回外輪の減圧閾値が、旋回内輪の減圧閾値よりも減圧しやすい側に設定されているのが望ましい。
【0013】
これによれば、車体荷重が大きくかかる旋回外輪の減圧閾値を旋回内輪よりも減圧しやすい側に設定するので、旋回外輪の旋回力を有効に利用して、よりアンダーステア状態を解消しやすくすることができる。
【0014】
また、前記した構成において、オーバーステア状態であるときに後輪のみに対して実行する旋回減圧制御では、前記減圧閾値が、ニュートラルステア状態であるときの後輪の減圧閾値よりも減圧しやすい側に設定されるとともに、前記減圧量が、ニュートラルステア状態であるときの後輪の減圧量よりも大きくなるように設定されているのが望ましい。
【0015】
これによれば、オーバーステア状態のときに後輪の減圧閾値および減圧量を変更する量をニュートラルステア状態のときよりも大きくすることで、後輪の横滑りを解消することができるので、オーバーステア状態を解消しながら走行ラインのトレース性を向上させることができる。
【0016】
また、前記した構成において、前記旋回状態判定手段は、舵角と車体速度とを用いて規範ヨーレートを算出する規範ヨーレート算出部と、横加速度と車体速度を用いて路面限界ヨーレートを算出する路面限界ヨーレート算出部と、前記規範ヨーレートおよび前記路面限界ヨーレートから目標ヨーレートを算出する目標ヨーレート算出部と、を備えており、前記目標ヨーレートと車両に実際に作用する実ヨーレートとを比較して、前記実ヨーレートが前記目標ヨーレートから第1の所定値を減算した値よりも小さい場合は、車両がアンダーステア状態であると判定し、前記実ヨーレートが前記目標ヨーレートに第2の所定値を加算した値よりも大きい場合には、車両がオーバーステア状態であると判定し、アンダーステア状態およびオーバーステア状態と判定されなかった場合は、車両がニュートラルステア状態であると判定するのが望ましい。
【0017】
これによれば、目標ヨーレートと実ヨーレートとの偏差に基づいて容易に車両の旋回状態を切り分けることができるとともに、車種に応じて第1の所定値や第2の所定値を変更すれば、車種に応じてより適した制御を行うことができる。
【0018】
また、前記した構成において、前記スリップ関連量は、前記車体速度から前記車輪速度を減算したスリップ量であり、前記アンチロックブレーキ制御手段は、前記スリップ量が前記減圧閾値よりも大きくなったときに、車輪ブレーキに付与するブレーキ液圧を減圧するのが望ましい。
【0019】
これによれば、車体速度と車輪速度との偏差であるスリップ量に基づいて、アンチロックブレーキ制御における減圧の要否を確実に判断することができる。
【0020】
また、前記した構成において、路面が少なくとも低摩擦係数路面であるか否かを判定する路面摩擦係数判定手段をさらに備え、前記アンチロックブレーキ制御手段は、路面が低摩擦係数路面であると判定された場合にのみ、前記旋回減圧制御を実行するのが望ましい。
【0021】
これによれば、車両が低摩擦係数路面を旋回しているときは走行ラインのトレース性が特に悪化しやすいので、このような状況に特化して旋回減圧制御を実行することで、低摩擦係数路面において大きな旋回力を発生させて走行ラインのトレース性を向上させることができる。
【0022】
また、前記した構成において、前記路面摩擦係数判定手段は、横加速度に基づいて第1の路面摩擦係数を推定する第1の推定手段と、前後加速度に基づいて第2の路面摩擦係数を推定する第2の推定手段と、前記第1の路面摩擦係数と前記第2の路面摩擦係数とのうちいずれか一方を路面摩擦係数として選択する選択手段と、当該選択手段で選択した路面摩擦係数が第3の所定値よりも小さいときに、路面が低摩擦係数路面であると判定する低μ路判定手段と、を備え、前記選択手段は、少なくとも舵角と車体速度とに基づいて路面限界を超える操舵が行われているか否かを判定する限界操舵判定部を有し、路面限界を超える操舵が行われていると判定したときは、前記第1の路面摩擦係数と前記第2の路面摩擦係数とのうちいずれか小さい方を路面摩擦係数として選択し、路面限界を超える操舵が行われていないと判定したときは、前記第2の路面摩擦係数を路面摩擦係数として選択するように構成されるのが望ましい。
【0023】
これによれば、路面限界を超える操舵時(車両が走行する路面の摩擦係数において発生し得る最大の横加速度よりも大きな横加速度を発生させようとして操舵しているとき)にのみ横加速度から推定した第1の路面摩擦係数が選択可能となるように構成したので、最大横加速度が発生していない状態で横加速度を利用することを防止することができ、路面摩擦係数を精度よく推定して、この路面摩擦係数から低摩擦係数路面か否かを適切に判定することができる。
【発明の効果】
【0024】
本発明によれば、走行ラインのトレース性を向上させることができる。
【図面の簡単な説明】
【0025】
【図1】本発明の実施形態に係る車両用ブレーキ液圧制御装置を備えた車両の構成図である。
【図2】車両用ブレーキ液圧制御装置のブレーキ液圧回路図である。
【図3】制御部の構成を示すブロック図である。
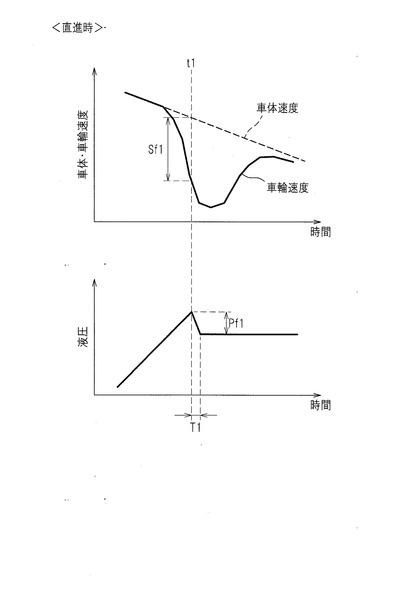
【図4】直進時の車体速度、車輪速度、液圧の状態を示すグラフである。
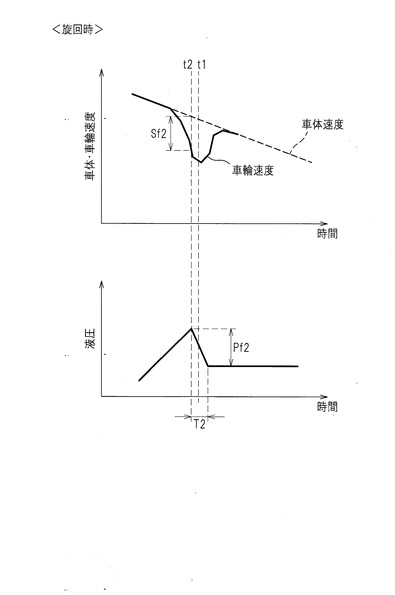
【図5】旋回時の車体速度、車輪速度、液圧の状態を示すグラフである。
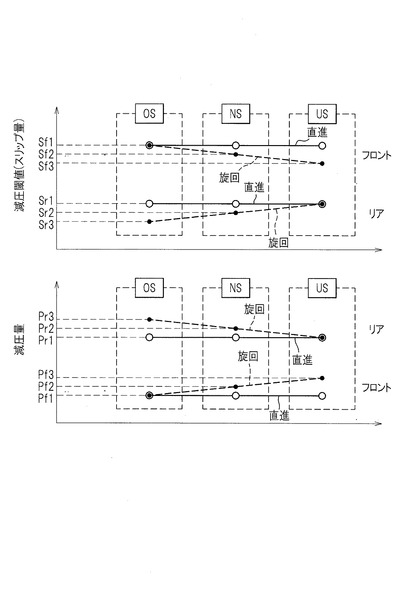
【図6】車両の旋回状態に応じた減圧閾値および減圧量を示す図である。
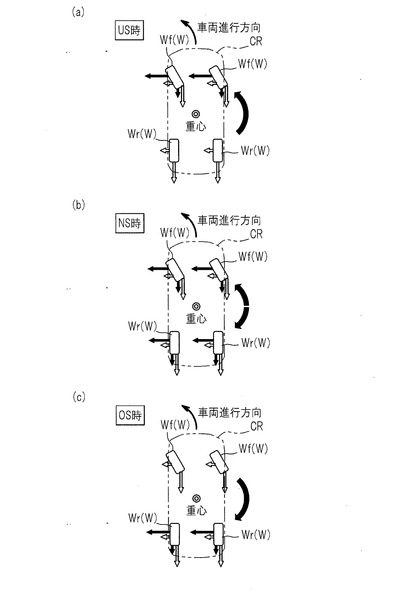
【図7】車両の旋回状態に応じて変化する各車輪にかかる力を示す図(a)〜(c)である。
【図8】アンチロックブレーキ制御を示すフローチャートである。
【図9】減圧閾値および減圧量を設定する制御を示すフローチャートである。
【図10】車両の旋回状態を判定する方法を示す図である。
【図11】低μ路面であるか否かを判定する方法を示す図である。
【図12】アンダーステア状態のときに前輪の旋回外輪と旋回内輪の減圧閾値を異なる値にした形態を示す図である。
【発明を実施するための形態】
【0026】
次に、本発明の実施形態について、適宜図面を参照しながら詳細に説明する。
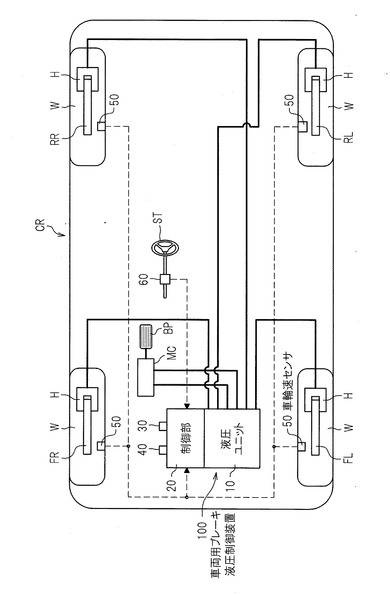
図1に示すように、車両用ブレーキ液圧制御装置100は、車両CRの各車輪Wに付与する制動力(ブレーキ液圧)を適宜制御するためのものであり、油路(液圧路)や各種部品が設けられた液圧ユニット10と、液圧ユニット10内の各種部品を適宜制御するための制御部20とを主に備えている。また、この車両用ブレーキ液圧制御装置100の制御部20には、横加速度センサ30、ヨーレートセンサ40、車輪速センサ50および舵角センサ60が接続されており、各センサ30〜60からの信号が入力されるようになっている。
【0027】
横加速度センサ30は、車両CRの横方向に働く加速度(実横加速度)を検出するセンサであり、制御部20に一体的に設けられている。
ヨーレートセンサ40は、車両CRの旋回角速度(実ヨーレート)を検出するセンサであり、制御部20に一体的に設けられている。
【0028】
車輪速センサ50は、車輪Wの車輪速度を検出するセンサであり、各車輪Wに設けられている。
舵角センサ60は、ステアリングSTの舵角を検出するセンサであり、ステアリングSTの回転軸に設けられている。
【0029】
制御部20は、例えば、CPU、RAM、ROMおよび入出力回路を備えており、各センサ30〜60からの入力と、ROMに記憶されたプログラムやデータに基づいて各演算処理を行うことによって、制御を実行する。
【0030】
また、ホイールシリンダHは、マスタシリンダMCおよび車両用ブレーキ液圧制御装置100により発生されたブレーキ液圧を各車輪Wに設けられた車輪ブレーキFR,FL,RR,RLの作動力に変換する液圧装置であり、それぞれ配管を介して車両用ブレーキ液圧制御装置100の液圧ユニット10に接続されている。
【0031】
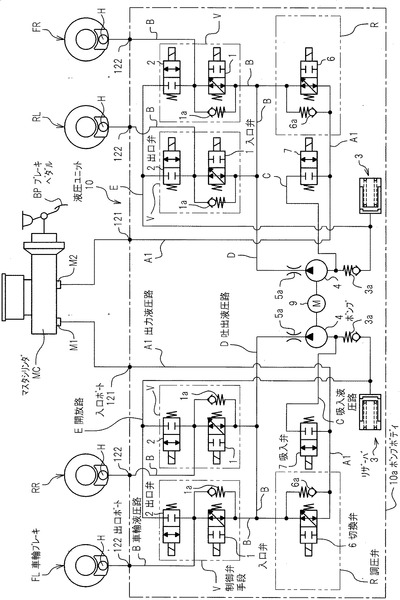
図2に示すように、車両用ブレーキ液圧制御装置100の液圧ユニット10は、運転者がブレーキペダルBPに加える踏力に応じたブレーキ液圧を発生する液圧源であるマスタシリンダMCと、車輪ブレーキFR,FL,RR,RLとの間に配置されている。液圧ユニット10は、ブレーキ液が流通する油路を有する基体であるポンプボディ10a、油路上に複数配置された入口弁1、出口弁2などから構成されている。マスタシリンダMCの二つの出力ポートM1,M2は、ポンプボディ10aの入口ポート121に接続され、ポンプボディ10aの出口ポート122が、各車輪ブレーキFR,FL,RR,RLに接続されている。そして、通常時はポンプボディ10a内の入口ポート121から出口ポート122までが連通した油路となっていることで、ブレーキペダルBPの踏力が各車輪ブレーキFL,RR,RL,FRに伝達されるようになっている。
【0032】
ここで、出力ポートM1から始まる油路は、前輪左側の車輪ブレーキFLと後輪右側の車輪ブレーキRRに通じており、出力ポートM2から始まる油路は、前輪右側の車輪ブレーキFRと後輪左側の車輪ブレーキRLに通じている。なお、以下では、出力ポートM1から始まる油路を「第一系統」と称し、出力ポートM2から始まる油路を「第二系統」と称する。
【0033】
液圧ユニット10には、その第一系統に各車輪ブレーキFL,RRに対応して二つの制御弁手段Vが設けられており、同様に、その第二系統に各車輪ブレーキRL,FRに対応して二つの制御弁手段Vが設けられている。また、この液圧ユニット10には、第一系統および第二系統のそれぞれに、リザーバ3、ポンプ4、オリフィス5a、調圧弁(レギュレータ)R、吸入弁7が設けられている。また、液圧ユニット10には、第一系統のポンプ4と第二系統のポンプ4とを駆動するための共通のモータ9が設けられている。このモータ9は、回転数制御可能なモータであり、本実施形態では、デューティ制御により回転数制御が行われる。
【0034】
なお、以下では、マスタシリンダMCの出力ポートM1,M2から各調圧弁Rに至る油路を「出力液圧路A1」と称し、第一系統の調圧弁Rから車輪ブレーキFL,RRに至る油路および第二系統の調圧弁Rから車輪ブレーキRL,FRに至る油路をそれぞれ「車輪液圧路B」と称する。また、出力液圧路A1からポンプ4に至る油路を「吸入液圧路C」と称し、ポンプ4から車輪液圧路Bに至る油路を「吐出液圧路D」と称し、さらに、車輪液圧路Bから吸入液圧路Cに至る油路を「開放路E」と称する。
【0035】
制御弁手段Vは、マスタシリンダMCまたはポンプ4から車輪ブレーキFL,RR,RL,FR(詳細には、ホイールシリンダH)への液圧の行き来を制御する弁であり、ホイールシリンダHの圧力を増加、保持または低下させることができる。そのため、制御弁手段Vは、入口弁1、出口弁2、チェック弁1aを備えて構成されている。
【0036】
入口弁1は、各車輪ブレーキFL,RR,RL,FRとマスタシリンダMCとの間、すなわち車輪液圧路Bに設けられた常開型の比例電磁弁である。そのため、入口弁1に流す駆動電流の値に応じて、入口弁1の上下流の差圧が調整可能となっている。
【0037】
出口弁2は、各車輪ブレーキFL,RR,RL,FRと各リザーバ3との間、すなわち車輪液圧路Bと開放路Eとの間に介設された常閉型の電磁弁である。出口弁2は、通常時に閉塞されているが、車輪Wがロックしそうになったときに制御部20により開放されることで、各車輪ブレーキFL,FR,RL,RRに作用するブレーキ液圧を各リザーバ3に逃がす。
【0038】
チェック弁1aは、各入口弁1に並列に接続されている。このチェック弁1aは、各車輪ブレーキFL,FR,RL,RR側からマスタシリンダMC側へのブレーキ液の流入のみを許容する弁であり、ブレーキペダルBPからの入力が解除された場合に、入口弁1を閉じた状態にしたときにおいても、各車輪ブレーキFL,FR,RL,RR側からマスタシリンダMC側へのブレーキ液の流入を許容する。
【0039】
リザーバ3は、開放路Eに設けられており、各出口弁2が開放されることによって逃がされるブレーキ液圧を貯留する機能を有している。また、リザーバ3とポンプ4との間には、リザーバ3側からポンプ4側へのブレーキ液の流れのみを許容するチェック弁3aが介設されている。
【0040】
ポンプ4は、出力液圧路A1に通じる吸入液圧路Cと車輪液圧路Bに通じる吐出液圧路Dとの間に介設されており、リザーバ3で貯留されているブレーキ液を吸入して吐出液圧路Dに吐出する機能を有している。
【0041】
これにより、リザーバ3により吸収されたブレーキ液をマスタシリンダMCに戻すことができるとともに、ブレーキペダルBPの操作の有無に関わらずブレーキ液圧を発生して、車輪ブレーキFL,RR,RL,FRに制動力を発生することができる。なお、ポンプ4によるブレーキ液の吐出量は、モータ9の回転数(デューティ比)に依存している。すなわち、モータ9の回転数(デューティ比)が大きくなると、ポンプ4によるブレーキ液の吐出量も大きくなる。
【0042】
オリフィス5aは、ポンプ4から吐出されたブレーキ液の圧力の脈動を減衰させている。
【0043】
調圧弁Rは、通常時にマスタシリンダMCからのブレーキ液を車輪ブレーキFL,RR,RL,FRに流すことを許容するとともに、ポンプ4が発生したブレーキ液圧によりホイールシリンダH側の圧力を増加するときには、この流れを遮断しつつ、ホイールシリンダH側の圧力を設定値以下に調節する機能を有している。具体的に、調圧弁Rは、切換弁6およびチェック弁6aを備えて構成されている。
【0044】
切換弁6は、マスタシリンダMCに通じる出力液圧路A1と各車輪ブレーキFL,FR,RL,RRに通じる車輪液圧路Bとの間に介設された常開型の比例電磁弁である。そのため、切換弁6に入力される駆動電流の値(指示電流値)に応じて閉弁力を任意に変更することで、切換弁6の上下流の差圧が調整されて、車輪液圧路Bの圧力を設定値以下に調節可能となっている。
【0045】
チェック弁6aは、各切換弁6に並列に接続されている。このチェック弁6aは、出力液圧路A1から車輪液圧路Bへのブレーキ液の流れを許容する一方向弁である。
【0046】
吸入弁7は、吸入液圧路Cに設けられた常閉型の電磁弁であり、吸入液圧路Cを開放する状態および遮断する状態を切り換えるものである。吸入弁7は、例えば、ポンプ4によって各車輪ブレーキFL,FR,RL,RR内の液圧を加圧するときに制御部20の制御により開弁される。
【0047】
次に、制御部20の詳細について説明する。
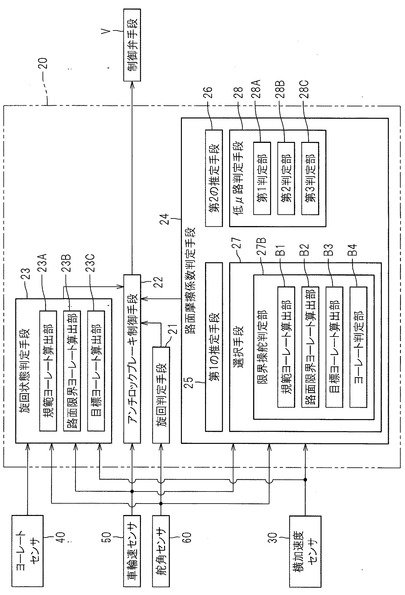
図3に示すように、制御部20は、横加速度センサ30、ヨーレートセンサ40、車輪速センサ50および舵角センサ60から入力された信号に基づき、制御弁手段V(入口弁1および出口弁2)などを制御することで、例えばアンチロックブレーキ制御を実行可能となっている。具体的に、制御部20は、旋回判定手段21と、アンチロックブレーキ制御手段22と、旋回状態判定手段23と、路面摩擦係数判定手段24とを備えて構成されている。
【0048】
旋回判定手段21は、舵角センサ60で検出した舵角に基づいて車両CRが旋回しているか否かを判定する機能を備えている。そして、旋回判定手段21は、車両が旋回していると判定すると、そのことを示す旋回信号をアンチロックブレーキ制御手段22に出力する。
【0049】
アンチロックブレーキ制御手段22は、4つの車輪速センサ50で検出された車輪速度に基づいて車体速度を算出するとともに、この車体速度から各車輪速度を減算することでスリップ関連量の一例としてのスリップ量を各車輪Wごとに算出する機能を有している。また、アンチロックブレーキ制御手段22は、スリップ量が減圧閾値に達したこと(詳しくは、スリップ量が減圧閾値よりも大きくなったこと)を条件として、車輪ブレーキFL,FR,RL,RRに付与するブレーキ液圧を減圧するアンチロックブレーキ制御を実行する機能を有している。
【0050】
そして、アンチロックブレーキ制御手段22は、アンチロックブレーキ制御を実行する際に、旋回判定手段21から旋回信号を受けている場合(旋回判定手段21によって車両が旋回していると判定された場合)には、減圧閾値を直進時の減圧閾値よりも減圧しやすい側に変更し、かつ、ブレーキ液圧の減圧量を直進時の減圧量よりも大きくするように変更する旋回減圧制御を実行するようになっている。具体的に、アンチロックブレーキ制御手段22は、図4および図5に示すように、旋回時の減圧閾値(例えば前輪側減圧閾値Sf2)を直進時の減圧閾値(例えば前輪側減圧閾値Sf1)よりも小さくする。
【0051】
また、アンチロックブレーキ制御手段22は、旋回時の減圧量(例えば前輪側減圧量Pf2)を直進時の減圧量(例えば前輪側減圧量Pf1)よりも大きくする。すなわち、アンチロックブレーキ制御手段22は、旋回時における出口弁2の開放時間を、直進時における開放時間T1よりも長い時間T2にする。
【0052】
これにより、車両CRが旋回している場合には、減圧閾値を直進時よりも小さくすることで減圧するタイミングを直進時のタイミング(時刻t1)よりも早いタイミング(時刻t2)にすることできるとともに、減圧量を直進時よりも大きくすることで車輪速度をいち早く車体速度に近づけることが可能となっている。そして、このように車輪速度をいち早く車体速度に近づけることで、大きな旋回力を発生させることができるので、これによって走行ラインのトレース性を向上させることが可能となっている。
【0053】
また、アンチロックブレーキ制御手段22は、前述した旋回減圧制御(直進時とは異なる減圧閾値・減圧量に設定する制御)を、後で詳述する路面摩擦係数判定手段24から低摩擦係数信号を受けているときのみに(路面が低摩擦係数路面であると判定された場合にのみに)実行するようになっている。これにより、車両CRが低摩擦係数路面(以下、「低μ路面」ともいう。)を旋回しているときは走行ラインのトレース性が特に悪化しやすいので、このような状況に特化して旋回減圧制御を実行することで、低μ路面において大きな旋回力を発生させて走行ラインのトレース性を向上させることが可能となっている。
【0054】
さらに、アンチロックブレーキ制御手段22は、後で詳述する旋回状態判定手段23によって判定される車両CRの旋回状態に応じて、前述した旋回減圧制御を行う対象となる車輪Wを変更する制御を実行するように構成されている。具体的に、アンチロックブレーキ制御手段22は、旋回状態判定手段23によってアンダーステア状態(以下、「US状態」ともいう。)であると判定されている場合には、前輪のみに対して旋回減圧制御を実行する。
【0055】
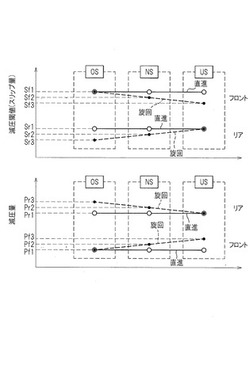
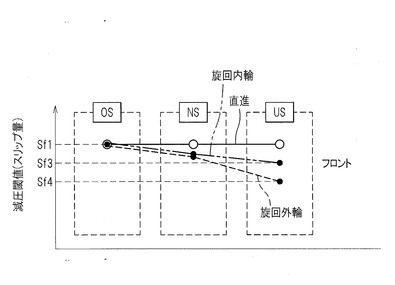
つまり、図6に示すように、US状態においては、前輪(フロント)の減圧閾値が直進時(白丸)の値Sf1よりも小さな値Sf3(黒丸)に設定され、前輪の減圧量が直進時の値Pf1よりも大きな値Pf3に設定される。これに対し、後輪(リア)の減圧閾値および減圧量は、ともに直進時の値Sr1,Pr1と同じ値に設定される。
【0056】
また、アンチロックブレーキ制御手段22は、旋回状態判定手段23によってニュートラルステア状態(以下、「NS状態」ともいう。)であると判定されている場合には、前輪および後輪に対して旋回減圧制御を実行する。つまり、NS状態においては、前後輪の減圧閾値が直進時の値Sf1,Sr1よりも小さな値Sf2,Sr2に設定され、前後輪の減圧量が直進時の値Pf1,Pr1よりも大きな値Pf2,Pr2に設定される。
【0057】
また、アンチロックブレーキ制御手段22は、旋回状態判定手段23によってオーバーステア状態(以下、「OS状態」ともいう。)であると判定されている場合には、後輪のみに対して旋回減圧制御を実行する。つまり、OS状態においては、後輪の減圧閾値が直進時の値Sr1よりも小さな値Sr3に設定され、後輪の減圧量が直進時の値Pr1よりも大きな値Pr3に設定される。これに対し、前輪の減圧閾値および減圧量は、ともに直進時の値Sf1,Pf1と同じ値に設定される。
【0058】
これにより、車両CRの旋回状態に応じて旋回減圧制御を行う対象となる車輪Wが切り替えられるので、車両CRの安定性を向上させながら大きな旋回力を発生させて走行ラインのトレース性を向上させることが可能となっている。
【0059】
さらに、US状態であるときに前輪のみに対して実行する旋回減圧制御では、減圧閾値が、NS状態であるときの前輪の減圧閾値Sf2よりも小さな値Sf3に設定されるとともに、減圧量が、NS状態であるときの前輪の減圧量Pf2よりも大きな値Pf3に設定されている。このようにUS状態における前輪の減圧閾値および減圧量をNS状態よりも大きく変更することで、図7(a)に示すように、前輪Wfにより大きな旋回力(サイドフォース:黒の矢印)が発生するので、US状態を解消しながら走行ラインのトレース性を向上させることが可能となっている。なお、図7において、黒の矢印は、旋回減圧制御によって車輪Wに加わるサイドフォース(横向きの矢印)および制動力(下向きの矢印)であり、白の矢印は、旋回減圧制御でない通常の減圧制御によって車輪Wに加わるサイドフォースおよび制動力を示す。
【0060】
また、図6に示すように、OS状態であるときに後輪のみに対して実行する旋回減圧制御でも、減圧閾値が、NS状態であるときの後輪の減圧閾値Sr2よりも小さな値Sr3に設定されるとともに、減圧量が、NS状態であるときの後輪の減圧量Pr2よりも大きな値Pr3に設定されている。このように後輪の減圧閾値および減圧量を大きく変更することで、図7(c)に示すように、後輪Wrにより大きなサイドフォースが発生するので、後輪Wrの横滑りが減少して、OS状態を解消しながら走行ラインのトレース性を向上させることが可能となっている。
【0061】
なお、図6に示すように、NS状態のときには、直進時に対する減圧閾値および減圧量の差が、前後輪で略同じに設定されているので、図7(b)に示すように、各車輪Wには、同程度の大きさの旋回力が働く。これにより、車両CRの横滑りを抑えることができ、走行ラインのトレース性を向上させることが可能となっている。
【0062】
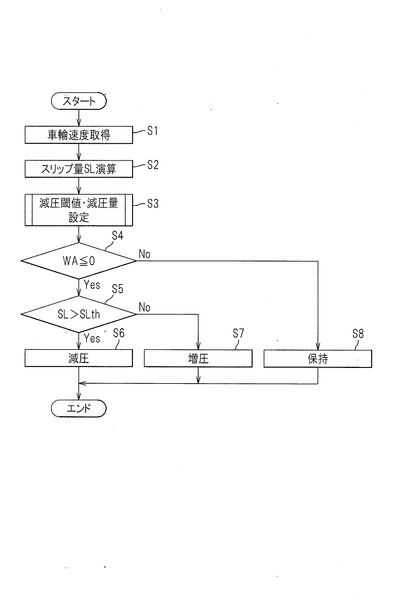
より具体的に、アンチロックブレーキ制御手段22は、図8および図9に示すフローチャートに基づいてアンチロックブレーキ制御を実行する。図8に示すように、アンチロックブレーキ制御手段22は、まず、各車輪速センサ50から各車輪Wの車輪速度を取得し(S1)、各車輪速度に基づいて各車輪Wのスリップ量SLを演算する(S2)。
【0063】
ステップS2の後、アンチロックブレーキ制御手段22は、旋回状態判定手段23および路面摩擦係数判定手段24から出力されてくる信号に基づいて、減圧閾値および減圧量を設定する(S3)。なお、このステップS3における具体的な処理は、後で図9を用いて詳述する。
【0064】
ステップS3で減圧閾値と減圧量を設定した後、アンチロックブレーキ制御手段22は、車輪速度に基づいて算出される車輪加速度WAが0以下であるか否かを判断する(S4)。ステップS4において、車輪加速度WAが0以下である場合には(Yes)、アンチロックブレーキ制御手段22は、スリップ量SLがステップS3で設定した減圧閾値SLthを超えたか否かを判断する(S5)。
【0065】
ステップS5において、スリップ量SLが減圧閾値SLthを超えた場合には(Yes)、アンチロックブレーキ制御手段22は、ステップS3で設定した減圧量に基づいて減圧制御を実行する(S6)。また、ステップS5において、スリップ量SLが減圧閾値SLth以下である場合には(No)、アンチロックブレーキ制御手段22は、増圧制御を実行する(S7)。
【0066】
また、ステップS4において、車輪加速度WAが0よりも大きい場合には(No)、アンチロックブレーキ制御手段22は、保持制御を実行する(S8)。なお、ステップS6、ステップS7またはステップS8の後、アンチロックブレーキ制御手段22は、再度ステップS1に戻って、本制御を繰り返し実行する。
【0067】
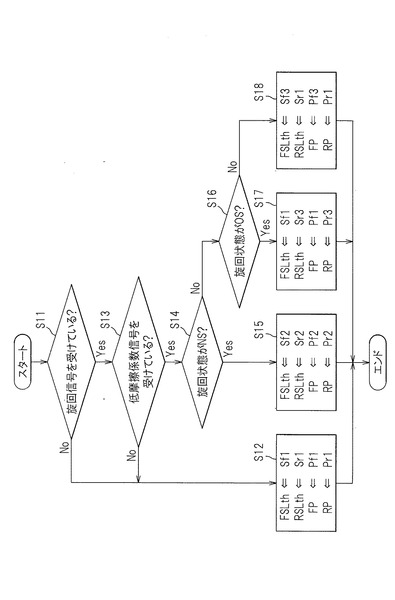
図9に示すように、減圧閾値および減圧量を設定するステップS3の処理において、アンチロックブレーキ制御手段22は、まず、旋回判定手段21が車両CRが旋回していると判定したことを示す旋回信号を受けているか否かを判定する(S11)。ステップS11において、旋回信号を受けていないと判定した場合には(No)、アンチロックブレーキ制御手段22は、前側減圧閾値FSLth、後側減圧閾値RSLth、前側減圧量FPおよび後側減圧量RPを、図6のようなマップに基づいて、直進時における前輪の減圧閾値Sf1、後輪の減圧閾値Sr1、前輪の減圧量Pf1および後輪の減圧量Pr1に設定する。
【0068】
また、ステップS11において、旋回信号を受けていると判定した場合には(Yes)、アンチロックブレーキ制御手段22は、後述する路面摩擦係数判定手段24から低摩擦係数信号を受けているか否かを判定する(S13)。ステップS13において、低摩擦係数信号を受けていないと判定した場合には(No)、アンチロックブレーキ制御手段22は、前側減圧閾値FSLth等を直進時と同じ値Sf1等に設定する(S12)。
【0069】
ステップS13において、低摩擦係数信号を受けていると判定した場合には(Yes)、アンチロックブレーキ制御手段22は、後述する旋回状態判定手段23が判定した車両CRの旋回状態がNS状態か否かを判定する(S14)。ステップS14において、旋回状態判定手段23が判定した旋回状態がNS状態であると判定した場合には(Yes)、アンチロックブレーキ制御手段22は、前側減圧閾値FSLth、後側減圧閾値RSLth、前側減圧量FPおよび後側減圧量RPを、図6のようなマップに基づいて、NS状態時における前輪の減圧閾値Sf2、後輪の減圧閾値Sr2、前輪の減圧量Pf2および後輪の減圧量Pr2に設定する(S15)。
【0070】
また、ステップS14において、旋回状態判定手段23が判定した旋回状態がNS状態でないと判定した場合には(No)、アンチロックブレーキ制御手段22は、旋回状態判定手段23が判定した旋回状態がOS状態か否かを判定する(S16)。ステップS16において、旋回状態判定手段23が判定した旋回状態がOS状態であると判定した場合には(Yes)、アンチロックブレーキ制御手段22は、前側減圧閾値FSLth、後側減圧閾値RSLth、前側減圧量FPおよび後側減圧量RPを、図6のようなマップに基づいて、OS状態時における前輪の減圧閾値Sf1、後輪の減圧閾値Sr3、前輪の減圧量Pf1および後輪の減圧量Pr3に設定する(S17)。
【0071】
また、ステップS16において、旋回状態判定手段23が判定した旋回状態がOS状態でないと判定した場合には(No)、アンチロックブレーキ制御手段22は、前側減圧閾値FSLth、後側減圧閾値RSLth、前側減圧量FPおよび後側減圧量RPを、図6のようなマップに基づいて、US状態時における前輪の減圧閾値Sf3、後輪の減圧閾値Sr1、前輪の減圧量Pf3および後輪の減圧量Pr1に設定する(S18)。
【0072】
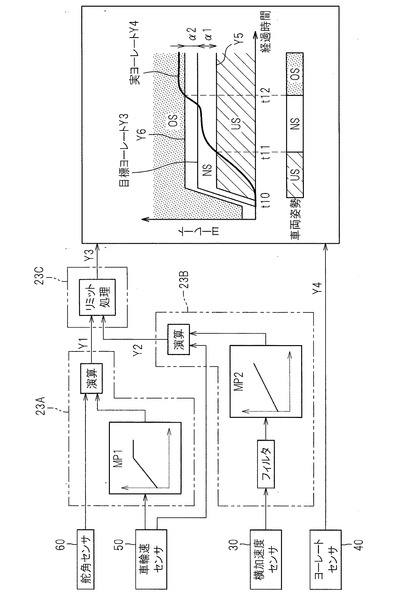
図3に示すように、旋回状態判定手段23は、車両CRがアンダーステア状態、ニュートラルステア状態、オーバーステア状態のいずれであるかを判定する機能を有している。具体的に、旋回状態判定手段23は、規範ヨーレート算出部23Aと、路面限界ヨーレート算出部23Bと、目標ヨーレート算出部23Cを備えている。なお、以下の説明では、図3とともに図10も参照して説明する。
【0073】
規範ヨーレート算出部23Aは、舵角センサ60から取得した舵角と、車輪速センサ50から取得した車輪速度から算出される車体速度とを用いて規範ヨーレートY1を算出する機能を有している。具体的には、規範ヨーレート算出部23Aは、車輪速センサ50からの信号に基づいて算出される車体速度に、第1マップMP1から算出される係数を乗算し、その値と舵角センサ60から取得した舵角とを演算(例えば乗算)して、規範ヨーレートY1を算出する。ここで、第1マップMP1は、車体速度と係数との関係を示すマップであり、実験やシミュレーション等によって適宜設定される。
【0074】
路面限界ヨーレート算出部23Bは、横加速度センサ30から取得した実横加速度と、車輪速センサ50から取得した車輪速度から算出される車体速度から決まる路面限界ヨーレートY2を算出する機能を有している。具体的には、路面限界ヨーレート算出部23Bは、横加速度センサ30から取得した実横加速度の絶対値を、減少側にのみ変化させにくくするフィルタ処理を行うことで得られる横加速度フィルタ値から第2マップMP2に基づいて算出される値と、車体速度を演算(例えば除算)して、路面限界ヨーレートY2を算出する。
【0075】
ここで、フィルタ処理は、例えば「横加速度の絶対値」が前回値より所定量以上小さくなっているときは、今回の「横加速度の絶対値」を前回値から所定量だけ小さくした値とすることで行われる。また、第2マップMP2は、横加速度フィルタ値と路面限界ヨーレートとの関係を示すマップであり、実験やシミュレーション等によって適宜設定される。
【0076】
目標ヨーレート算出部23Cは、規範ヨーレート算出部23Aで算出した規範ヨーレートY1と、路面限界ヨーレート算出部23Bで算出した路面限界ヨーレートY2とから目標ヨーレートY3を算出する機能を有している。具体的には、目標ヨーレート算出部23Cは、規範ヨーレートY1を路面限界ヨーレートY2でリミット処理、すなわち、規範ヨーレートY1と路面限界ヨーレートY2のうち小さい方のヨーレートを目標ヨーレートY3とする機能を有している。
【0077】
そして、旋回状態判定手段23は、図10の右側のグラフに示すように、目標ヨーレート算出部23Cで算出した目標ヨーレートY3と、ヨーレートセンサ40から取得した車両CRに実際に作用する実ヨーレートY4とを比較する。旋回状態判定手段23は、実ヨーレートY4が、目標ヨーレートY3から第1の所定値α1を減算した値Y5よりも小さい場合には、車両CRがUS状態であると判定する(時刻t10〜t11間)。
【0078】
旋回状態判定手段23は、実ヨーレートY4が目標ヨーレートY3に第2の所定値α2を加算した値Y6よりも大きい場合には、車両CRがOS状態であると判定する(時刻t12以降)。旋回状態判定手段23は、実ヨーレートY4が値Y5〜Y6の範囲である場合(すなわち、US状態およびOS状態と判定しなかった場合)には、車両CRがNS状態であると判定する(時刻t11〜t12間)。
【0079】
これにより、目標ヨーレートY3と実ヨーレートY4との偏差に基づいて容易に車両CRの旋回状態を切り分けることができるとともに、車種に応じて第1の所定値α1や第2の所定値α2を変更すれば、車種に応じてより適した制御を行うことが可能となっている。
【0080】
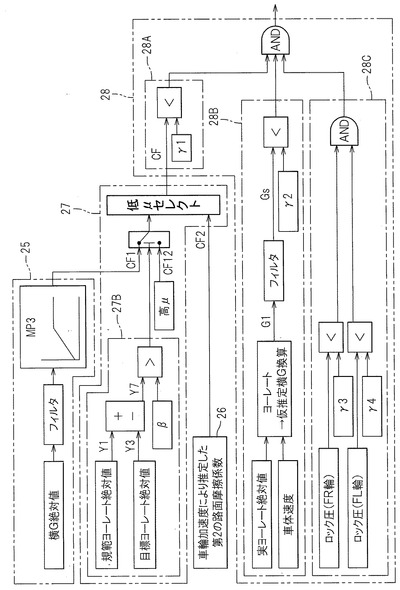
図3に示すように、路面摩擦係数判定手段24は、路面が少なくとも低μ路面であるか否かを判定し、低μ路面と判定した場合には、そのことを示す低摩擦係数信号をアンチロックブレーキ制御手段22に出力する機能を有している。具体的に、路面摩擦係数判定手段24は、第1の推定手段25と、第2の推定手段26と、選択手段27と、低μ路判定手段28とを備えて構成されている。なお、以下の説明では、図3とともに図11も参照して説明する。
【0081】
第1の推定手段25は、横加速度センサ30から取得した実横加速度(図11では「横G」で示す)に基づいて第1の路面摩擦係数CF1を推定する機能を有している。具体的に、第1の推定手段25は、実横加速度の絶対値を減少側にのみ変化させにくくするフィルタ処理(前述したフィルタ処理と同様の処理)を行うことで得られる横加速度フィルタ値と、マップMP3とから第1の路面摩擦係数CF1を算出している。
【0082】
ここで、マップMP3は、横加速度フィルタ値と路面μとの関係を示すマップであり、実験やシミュレーション等によって適宜設定される。このように、実横加速度の絶対値をフィルタ処理することで、外乱などによって実横加速度が変動したり、ハンドルを切り返したりすることに起因して、第1の路面摩擦係数CF1を誤って小さく推定しまうことを防止することが可能となっている。
【0083】
第2の推定手段26は、車輪速度から算出した車輪加速度(前後加速度)に基づいて第2の路面摩擦係数CF2を推定する機能を有している。なお、車輪加速度に基づいて路面摩擦係数を推定する技術は、公知であるため、その説明は省略する。
【0084】
選択手段27は、第1の路面摩擦係数CF1と第2の路面摩擦係数CF2とのうちいずれか一方を路面摩擦係数CFとして選択する機能を有している。具体的に、選択手段27は、限界操舵判定部27Bを有している。
【0085】
限界操舵判定部27Bは、舵角センサ60から取得した舵角と、横加速度センサ30から取得した実横加速度と、車輪速センサ50から取得した車輪速度に基づいて算出した車体速度とに基づいて、路面限界を超える操舵(車両CRが走行する路面の摩擦係数において発生し得る最大の横加速度よりも大きな横加速度を発生させるような操舵)が行われているか否かを判定する機能を有している。具体的に、限界操舵判定部27Bは、規範ヨーレート算出部B1と、路面限界ヨーレート算出部B2と、目標ヨーレート算出部B3と、ヨーレート判定部B4とを備えている。
【0086】
規範ヨーレート算出部B1は、前述した規範ヨーレート算出部23Aと同様の機能、すなわち舵角と車体速度とから規範ヨーレートY1の絶対値を算出する機能を有している。
【0087】
路面限界ヨーレート算出部B2は、前述した路面限界ヨーレート算出部23Bと同様の機能、すなわち実横加速度と車体速度から決まる最大のヨーレートを路面限界ヨーレートY2の絶対値として算出する機能を有している。
【0088】
目標ヨーレート算出部B3は、前述した目標ヨーレート算出部23Cと同様の機能、すなわち規範ヨーレートY1の絶対値と路面限界ヨーレートY2の絶対値のうち小さい方を目標ヨーレートY3の絶対値として算出する機能を有している。
【0089】
なお、規範ヨーレート算出部B1、路面限界ヨーレート算出部B2、目標ヨーレート算出部B3は、それぞれ前述した規範ヨーレート算出部23A、路面限界ヨーレート算出部23B、目標ヨーレート算出部23Cと同一であってもよいし、各フィルタの強さや各マップの設定を異ならせた別個のものであってもよい。
【0090】
ヨーレート判定部B4は、規範ヨーレートY1の絶対値から目標ヨーレートY3を減算した値Y7が正の所定値βよりも大きいか否かを判定することで、実質、規範ヨーレートY1が路面限界ヨーレートY2よりも所定値βだけ大きいか否かを判定する機能を有している。なぜなら、Y7=Y1−Y3であり、Y3=MIN(Y1,Y2)だからである。そして、限界操舵判定部27Bは、値Y7が正の所定値βよりも大きい場合(Y1>Y2+βの場合)には、路面限界を超える操舵が行われていると判定し、値Y7が正の所定値β以下の場合(Y1≦Y2+βの場合)には、路面限界を超える操舵が行われていないと判定する。
【0091】
これにより、純粋にドライバの操舵(舵角)に対応した値である規範ヨーレートY1と、現在の実横加速度と車体速度から決まる路面限界ヨーレートY2に関連した目標ヨーレートY3とを用いて、路面限界を超える操舵時か否かを的確に判定することが可能となっている。
【0092】
そして、選択手段27は、ヨーレート判定部B4で路面限界を超える操舵が行われていると判定したときは、第1の路面摩擦係数CF1を選択し、当該第1の路面摩擦係数CF1と第2の路面摩擦係数CF2とのうちいずれか小さい方を路面摩擦係数CFとして選択する(図11の「低μセレクト」参照)。また、選択手段27は、路面限界を超える操舵が行われていないと判定したときは、第2の路面摩擦係数CF2が路面摩擦係数CFとして選択されるような高摩擦係数CF12を選択することで、次の「低μセレクト」の工程で第2の路面摩擦係数CF2を路面摩擦係数CFとして選択する。
【0093】
これにより、路面限界を超える操舵時にのみ実横加速度から推定した第1の路面摩擦係数CF1が選択可能となるので、最大横加速度が発生していない状態で実横加速度を利用することを防止することができ、路面摩擦係数CFを精度よく推定して、この路面摩擦係数CFから低μ路面か否かを適切に判定することが可能となっている。
【0094】
低μ路判定手段28は、車両CRが走行している路面が低μ路面であるか否かを判定する機能を有している。具体的に、低μ路判定手段28は、第1判定部28Aと、第2判定部28Bと、第3判定部28Cとを備えて構成されている。
【0095】
第1判定部28Aは、選択手段27で選択した路面摩擦係数CFが所定値γ1(第3の所定値)よりも小さいという第1の条件を満たすか否かを判定する機能を有している。
【0096】
第2判定部28Bは、ヨーレートセンサ40から取得した実ヨーレートの絶対値に基づいて算出した推定横加速度Gsが所定値γ2よりも小さいという第2の条件を満たすか否かを判定する機能を有している。具体的に、第2判定部28Bは、実ヨーレートの絶対値と車体速度とから仮推定横加速度G1を算出し、当該仮推定横加速度G1に対して、減少側にのみ変化させにくくするフィルタ処理(前述したフィルタ処理と同様の処理)を行って推定横加速度Gsを算出している。
【0097】
ここで、実ヨーレートの絶対値と車体速度とから仮推定横加速度G1を算出する方法としては、例えば「仮推定横加速度=車体速度×角速度(ヨーレートをrad単位に変更した値)」という式を用いて算出する方法が挙げられる。
【0098】
このようにして推定横加速度Gsを算出することによって、外乱などによってヨーレートが変動したり、ハンドルを切り返したりすることに起因して、推定横加速度Gsを誤って小さく推定しまうことを防止することが可能となっている。
【0099】
第3判定部28Cは、アンチロックブレーキ制御で減圧するときの左右の前輪のそれぞれのロック液圧(減圧制御が開始された時点のホイールシリンダH内のブレーキ液圧)が所定値γ3,γ4よりもそれぞれ小さいという第3の条件を満たすか否かを判定する機能を有している。ここで、所定値γ3,γ4は、同一の値であってもよいし、異なる値であってもよい。
【0100】
このように、制動時に荷重がかかるために路面の影響を受けやすい前輪のロック液圧を用いて、また、左右輪のロック液圧を個別に判定することで、ロック液圧に基づく低μ路面の判定を確実に行うことが可能となっている。
【0101】
そして、低μ路判定手段28は、第1の条件、第2の条件および第3の条件のすべてを満たしたときに、低μ路面であると判定するようになっている。これにより、路面が低μ路面であるか否かを、選択手段27で選んだ路面摩擦係数CFだけでなく、他の条件(実ヨーレートから推定する推定横加速度Gsが小さいこと、または、ロック液圧が小さいこと)も用いて判断するので、低μ路面の判定をより正確に行うことが可能となっている。
【0102】
また、このように横加速度センサ30等より求める路面摩擦係数CFだけでなく、他の条件も用いて判断するので、例えば横加速度センサ30が故障していることに起因して路面摩擦係数CFが誤った値に推定される場合であっても、誤った値であることを、他の条件(推定横加速度Gsの条件、または、ロック液圧の条件)から判断することが可能となっている。
【0103】
なお、本発明は前記実施形態に限定されることなく、以下に例示するように様々な形態で利用できる。
前記実施形態では、US状態において左右の前輪の減圧閾値をそれぞれ同じ値Sf3としたが、本発明はこれに限定されず、図12に示すように、US状態であるときに前輪のみに対して実行する旋回減圧制御では、旋回外輪の減圧閾値を、旋回内輪の減圧閾値Sf3よりも小さい値Sf4(減圧しやすい側の値)に設定してもよい。このように車体荷重が大きくかかる旋回外輪の減圧閾値を旋回内輪よりも小さくすることで、旋回外輪の旋回力を有効に利用して、よりUS状態を解消しやすくすることができる。
【0104】
なお、これと同様に、OS状態において、後輪の旋回外輪の減圧閾値を、旋回内輪の減圧閾値よりも減圧しやすい側に設定してもよい。この場合も、車体荷重が大きくかかる旋回外輪の旋回力を有効に利用して、よりOS状態を解消しやすくすることができる。
【0105】
前記実施形態では、スリップ関連量をスリップ量としたが、本発明はこれに限定されず、例えばスリップ率などであってもよい。
【0106】
前記実施形態では、安全を見て所定値βを正の値に設定したが、本発明はこれに限定されず、所定値βはゼロに設定されていてもよいし、単に、ヨーレート判定部は、規範ヨーレートが路面限界ヨーレートよりも大きいか否を判定するように構成されていてもよい。
【0107】
前記実施形態では、第2判定部28Bと第3判定部28Cの両方を設けるようにしたが、本発明はこれに限定されず、第2判定部28Bと第3判定部28Cのいずれか一方だけでよい。なお、この場合には、第1の条件と、第2の条件(または第3の条件)との2つの条件を満たしたときに、低μ路面であると判定すればよい。
【0108】
前記実施形態では、高摩擦係数CF12を利用することで、路面限界を超える操舵が行われていないと判定したときに、第2の路面摩擦係数CF2を路面摩擦係数CFとして選択するように構成したが、本発明はこれに限定されるものではない。例えば、路面限界を超える操舵が行われていないと判定したときに、第1の路面摩擦係数を無視して、第2の路面摩擦係数を選択するように選択手段を構成してもよい。
【符号の説明】
【0109】
20 制御部
21 旋回判定手段
22 アンチロックブレーキ制御手段
100 車両用ブレーキ液圧制御装置
CR 車両
FL,FR,RL,RR 車輪ブレーキ
【技術分野】
【0001】
本発明は、車両用ブレーキ液圧制御装置に関し、詳しくはアンチロックブレーキ制御を実行可能な車両用ブレーキ液圧制御装置に関する。
【背景技術】
【0002】
従来、車両用ブレーキ液圧制御装置として、車両の旋回制動時には、直進制動時よりも目標スリップ率を低下させることで、車両の横滑りを抑えて操舵性を向上させるものが知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開昭62−253560号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術では、旋回制動時において目標スリップ率のみを低下させていることから、走行ラインのトレース性を十分に満足させることができなかった。
【0005】
そこで、本発明は、走行ラインのトレース性を向上させることができる車両用ブレーキ液圧制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記課題を解決する本発明は、車体速度と車輪速度とを用いて算出するスリップ関連量が減圧閾値に達したことを条件として、車輪ブレーキに付与するブレーキ液圧を減圧するアンチロックブレーキ制御を実行するアンチロックブレーキ制御手段を有する車両用ブレーキ液圧制御装置において、舵角に基づいて車両が旋回しているか否かを判定する旋回判定手段を備え、前記アンチロックブレーキ制御手段は、アンチロックブレーキ制御を実行する際に、前記旋回判定手段によって車両が旋回していると判定された場合には、前記減圧閾値を直進時の減圧閾値よりも減圧しやすい側に変更し、かつ、ブレーキ液圧の減圧量を直進時の減圧量よりも大きくするように変更する旋回減圧制御を実行することを特徴とする。
【0007】
この構成によれば、車両が旋回している場合には、減圧閾値を直進時よりも減圧しやすい側に変更することで減圧するタイミングを早めるとともに、さらに減圧量を直進時よりも大きくすることで車輪速度をいち早く車体速度に近づけることができるので、大きな旋回力を発生させることができ、これによって走行ラインのトレース性を向上させることができる。
【0008】
また、前記した構成において、車両がアンダーステア状態、ニュートラルステア状態、オーバーステア状態のいずれであるかを判定する旋回状態判定手段をさらに備える場合には、前記アンチロックブレーキ制御手段は、前記旋回状態判定手段によってアンダーステア状態であると判定されている場合には、前輪のみに対して前記旋回減圧制御を実行し、前記旋回状態判定手段によってニュートラルステア状態であると判定されている場合には、前輪および後輪に対して前記旋回減圧制御を実行し、前記旋回状態判定手段によってオーバーステア状態であると判定されている場合には、後輪のみに対して前記旋回減圧制御を実行するのが望ましい。
【0009】
これによれば、車両の旋回状態に応じて旋回減圧制御を行う対象となる車輪を切り替えるので、車両の安定性を向上させながら大きな旋回力を発生させて走行ラインのトレース性を向上させることができる。
【0010】
また、前記した構成において、アンダーステア状態であるときに前輪のみに対して実行する旋回減圧制御では、前記減圧閾値が、ニュートラルステア状態であるときの前輪の減圧閾値よりも減圧しやすい側に設定されるとともに、前記減圧量が、ニュートラルステア状態であるときの前輪の減圧量よりも大きくなるように設定されているのが望ましい。
【0011】
これによれば、アンダーステア状態のときに前輪の減圧閾値および減圧量を変更する量をニュートラルステア状態のときよりも大きくすることで、前輪により大きな旋回力が発生するので、アンダーステア状態を解消しながら走行ラインのトレース性を向上させることができる。
【0012】
また、前記した構成において、アンダーステア状態であるときに前輪のみに対して実行する旋回減圧制御では、旋回外輪の減圧閾値が、旋回内輪の減圧閾値よりも減圧しやすい側に設定されているのが望ましい。
【0013】
これによれば、車体荷重が大きくかかる旋回外輪の減圧閾値を旋回内輪よりも減圧しやすい側に設定するので、旋回外輪の旋回力を有効に利用して、よりアンダーステア状態を解消しやすくすることができる。
【0014】
また、前記した構成において、オーバーステア状態であるときに後輪のみに対して実行する旋回減圧制御では、前記減圧閾値が、ニュートラルステア状態であるときの後輪の減圧閾値よりも減圧しやすい側に設定されるとともに、前記減圧量が、ニュートラルステア状態であるときの後輪の減圧量よりも大きくなるように設定されているのが望ましい。
【0015】
これによれば、オーバーステア状態のときに後輪の減圧閾値および減圧量を変更する量をニュートラルステア状態のときよりも大きくすることで、後輪の横滑りを解消することができるので、オーバーステア状態を解消しながら走行ラインのトレース性を向上させることができる。
【0016】
また、前記した構成において、前記旋回状態判定手段は、舵角と車体速度とを用いて規範ヨーレートを算出する規範ヨーレート算出部と、横加速度と車体速度を用いて路面限界ヨーレートを算出する路面限界ヨーレート算出部と、前記規範ヨーレートおよび前記路面限界ヨーレートから目標ヨーレートを算出する目標ヨーレート算出部と、を備えており、前記目標ヨーレートと車両に実際に作用する実ヨーレートとを比較して、前記実ヨーレートが前記目標ヨーレートから第1の所定値を減算した値よりも小さい場合は、車両がアンダーステア状態であると判定し、前記実ヨーレートが前記目標ヨーレートに第2の所定値を加算した値よりも大きい場合には、車両がオーバーステア状態であると判定し、アンダーステア状態およびオーバーステア状態と判定されなかった場合は、車両がニュートラルステア状態であると判定するのが望ましい。
【0017】
これによれば、目標ヨーレートと実ヨーレートとの偏差に基づいて容易に車両の旋回状態を切り分けることができるとともに、車種に応じて第1の所定値や第2の所定値を変更すれば、車種に応じてより適した制御を行うことができる。
【0018】
また、前記した構成において、前記スリップ関連量は、前記車体速度から前記車輪速度を減算したスリップ量であり、前記アンチロックブレーキ制御手段は、前記スリップ量が前記減圧閾値よりも大きくなったときに、車輪ブレーキに付与するブレーキ液圧を減圧するのが望ましい。
【0019】
これによれば、車体速度と車輪速度との偏差であるスリップ量に基づいて、アンチロックブレーキ制御における減圧の要否を確実に判断することができる。
【0020】
また、前記した構成において、路面が少なくとも低摩擦係数路面であるか否かを判定する路面摩擦係数判定手段をさらに備え、前記アンチロックブレーキ制御手段は、路面が低摩擦係数路面であると判定された場合にのみ、前記旋回減圧制御を実行するのが望ましい。
【0021】
これによれば、車両が低摩擦係数路面を旋回しているときは走行ラインのトレース性が特に悪化しやすいので、このような状況に特化して旋回減圧制御を実行することで、低摩擦係数路面において大きな旋回力を発生させて走行ラインのトレース性を向上させることができる。
【0022】
また、前記した構成において、前記路面摩擦係数判定手段は、横加速度に基づいて第1の路面摩擦係数を推定する第1の推定手段と、前後加速度に基づいて第2の路面摩擦係数を推定する第2の推定手段と、前記第1の路面摩擦係数と前記第2の路面摩擦係数とのうちいずれか一方を路面摩擦係数として選択する選択手段と、当該選択手段で選択した路面摩擦係数が第3の所定値よりも小さいときに、路面が低摩擦係数路面であると判定する低μ路判定手段と、を備え、前記選択手段は、少なくとも舵角と車体速度とに基づいて路面限界を超える操舵が行われているか否かを判定する限界操舵判定部を有し、路面限界を超える操舵が行われていると判定したときは、前記第1の路面摩擦係数と前記第2の路面摩擦係数とのうちいずれか小さい方を路面摩擦係数として選択し、路面限界を超える操舵が行われていないと判定したときは、前記第2の路面摩擦係数を路面摩擦係数として選択するように構成されるのが望ましい。
【0023】
これによれば、路面限界を超える操舵時(車両が走行する路面の摩擦係数において発生し得る最大の横加速度よりも大きな横加速度を発生させようとして操舵しているとき)にのみ横加速度から推定した第1の路面摩擦係数が選択可能となるように構成したので、最大横加速度が発生していない状態で横加速度を利用することを防止することができ、路面摩擦係数を精度よく推定して、この路面摩擦係数から低摩擦係数路面か否かを適切に判定することができる。
【発明の効果】
【0024】
本発明によれば、走行ラインのトレース性を向上させることができる。
【図面の簡単な説明】
【0025】
【図1】本発明の実施形態に係る車両用ブレーキ液圧制御装置を備えた車両の構成図である。
【図2】車両用ブレーキ液圧制御装置のブレーキ液圧回路図である。
【図3】制御部の構成を示すブロック図である。
【図4】直進時の車体速度、車輪速度、液圧の状態を示すグラフである。
【図5】旋回時の車体速度、車輪速度、液圧の状態を示すグラフである。
【図6】車両の旋回状態に応じた減圧閾値および減圧量を示す図である。
【図7】車両の旋回状態に応じて変化する各車輪にかかる力を示す図(a)〜(c)である。
【図8】アンチロックブレーキ制御を示すフローチャートである。
【図9】減圧閾値および減圧量を設定する制御を示すフローチャートである。
【図10】車両の旋回状態を判定する方法を示す図である。
【図11】低μ路面であるか否かを判定する方法を示す図である。
【図12】アンダーステア状態のときに前輪の旋回外輪と旋回内輪の減圧閾値を異なる値にした形態を示す図である。
【発明を実施するための形態】
【0026】
次に、本発明の実施形態について、適宜図面を参照しながら詳細に説明する。
図1に示すように、車両用ブレーキ液圧制御装置100は、車両CRの各車輪Wに付与する制動力(ブレーキ液圧)を適宜制御するためのものであり、油路(液圧路)や各種部品が設けられた液圧ユニット10と、液圧ユニット10内の各種部品を適宜制御するための制御部20とを主に備えている。また、この車両用ブレーキ液圧制御装置100の制御部20には、横加速度センサ30、ヨーレートセンサ40、車輪速センサ50および舵角センサ60が接続されており、各センサ30〜60からの信号が入力されるようになっている。
【0027】
横加速度センサ30は、車両CRの横方向に働く加速度(実横加速度)を検出するセンサであり、制御部20に一体的に設けられている。
ヨーレートセンサ40は、車両CRの旋回角速度(実ヨーレート)を検出するセンサであり、制御部20に一体的に設けられている。
【0028】
車輪速センサ50は、車輪Wの車輪速度を検出するセンサであり、各車輪Wに設けられている。
舵角センサ60は、ステアリングSTの舵角を検出するセンサであり、ステアリングSTの回転軸に設けられている。
【0029】
制御部20は、例えば、CPU、RAM、ROMおよび入出力回路を備えており、各センサ30〜60からの入力と、ROMに記憶されたプログラムやデータに基づいて各演算処理を行うことによって、制御を実行する。
【0030】
また、ホイールシリンダHは、マスタシリンダMCおよび車両用ブレーキ液圧制御装置100により発生されたブレーキ液圧を各車輪Wに設けられた車輪ブレーキFR,FL,RR,RLの作動力に変換する液圧装置であり、それぞれ配管を介して車両用ブレーキ液圧制御装置100の液圧ユニット10に接続されている。
【0031】
図2に示すように、車両用ブレーキ液圧制御装置100の液圧ユニット10は、運転者がブレーキペダルBPに加える踏力に応じたブレーキ液圧を発生する液圧源であるマスタシリンダMCと、車輪ブレーキFR,FL,RR,RLとの間に配置されている。液圧ユニット10は、ブレーキ液が流通する油路を有する基体であるポンプボディ10a、油路上に複数配置された入口弁1、出口弁2などから構成されている。マスタシリンダMCの二つの出力ポートM1,M2は、ポンプボディ10aの入口ポート121に接続され、ポンプボディ10aの出口ポート122が、各車輪ブレーキFR,FL,RR,RLに接続されている。そして、通常時はポンプボディ10a内の入口ポート121から出口ポート122までが連通した油路となっていることで、ブレーキペダルBPの踏力が各車輪ブレーキFL,RR,RL,FRに伝達されるようになっている。
【0032】
ここで、出力ポートM1から始まる油路は、前輪左側の車輪ブレーキFLと後輪右側の車輪ブレーキRRに通じており、出力ポートM2から始まる油路は、前輪右側の車輪ブレーキFRと後輪左側の車輪ブレーキRLに通じている。なお、以下では、出力ポートM1から始まる油路を「第一系統」と称し、出力ポートM2から始まる油路を「第二系統」と称する。
【0033】
液圧ユニット10には、その第一系統に各車輪ブレーキFL,RRに対応して二つの制御弁手段Vが設けられており、同様に、その第二系統に各車輪ブレーキRL,FRに対応して二つの制御弁手段Vが設けられている。また、この液圧ユニット10には、第一系統および第二系統のそれぞれに、リザーバ3、ポンプ4、オリフィス5a、調圧弁(レギュレータ)R、吸入弁7が設けられている。また、液圧ユニット10には、第一系統のポンプ4と第二系統のポンプ4とを駆動するための共通のモータ9が設けられている。このモータ9は、回転数制御可能なモータであり、本実施形態では、デューティ制御により回転数制御が行われる。
【0034】
なお、以下では、マスタシリンダMCの出力ポートM1,M2から各調圧弁Rに至る油路を「出力液圧路A1」と称し、第一系統の調圧弁Rから車輪ブレーキFL,RRに至る油路および第二系統の調圧弁Rから車輪ブレーキRL,FRに至る油路をそれぞれ「車輪液圧路B」と称する。また、出力液圧路A1からポンプ4に至る油路を「吸入液圧路C」と称し、ポンプ4から車輪液圧路Bに至る油路を「吐出液圧路D」と称し、さらに、車輪液圧路Bから吸入液圧路Cに至る油路を「開放路E」と称する。
【0035】
制御弁手段Vは、マスタシリンダMCまたはポンプ4から車輪ブレーキFL,RR,RL,FR(詳細には、ホイールシリンダH)への液圧の行き来を制御する弁であり、ホイールシリンダHの圧力を増加、保持または低下させることができる。そのため、制御弁手段Vは、入口弁1、出口弁2、チェック弁1aを備えて構成されている。
【0036】
入口弁1は、各車輪ブレーキFL,RR,RL,FRとマスタシリンダMCとの間、すなわち車輪液圧路Bに設けられた常開型の比例電磁弁である。そのため、入口弁1に流す駆動電流の値に応じて、入口弁1の上下流の差圧が調整可能となっている。
【0037】
出口弁2は、各車輪ブレーキFL,RR,RL,FRと各リザーバ3との間、すなわち車輪液圧路Bと開放路Eとの間に介設された常閉型の電磁弁である。出口弁2は、通常時に閉塞されているが、車輪Wがロックしそうになったときに制御部20により開放されることで、各車輪ブレーキFL,FR,RL,RRに作用するブレーキ液圧を各リザーバ3に逃がす。
【0038】
チェック弁1aは、各入口弁1に並列に接続されている。このチェック弁1aは、各車輪ブレーキFL,FR,RL,RR側からマスタシリンダMC側へのブレーキ液の流入のみを許容する弁であり、ブレーキペダルBPからの入力が解除された場合に、入口弁1を閉じた状態にしたときにおいても、各車輪ブレーキFL,FR,RL,RR側からマスタシリンダMC側へのブレーキ液の流入を許容する。
【0039】
リザーバ3は、開放路Eに設けられており、各出口弁2が開放されることによって逃がされるブレーキ液圧を貯留する機能を有している。また、リザーバ3とポンプ4との間には、リザーバ3側からポンプ4側へのブレーキ液の流れのみを許容するチェック弁3aが介設されている。
【0040】
ポンプ4は、出力液圧路A1に通じる吸入液圧路Cと車輪液圧路Bに通じる吐出液圧路Dとの間に介設されており、リザーバ3で貯留されているブレーキ液を吸入して吐出液圧路Dに吐出する機能を有している。
【0041】
これにより、リザーバ3により吸収されたブレーキ液をマスタシリンダMCに戻すことができるとともに、ブレーキペダルBPの操作の有無に関わらずブレーキ液圧を発生して、車輪ブレーキFL,RR,RL,FRに制動力を発生することができる。なお、ポンプ4によるブレーキ液の吐出量は、モータ9の回転数(デューティ比)に依存している。すなわち、モータ9の回転数(デューティ比)が大きくなると、ポンプ4によるブレーキ液の吐出量も大きくなる。
【0042】
オリフィス5aは、ポンプ4から吐出されたブレーキ液の圧力の脈動を減衰させている。
【0043】
調圧弁Rは、通常時にマスタシリンダMCからのブレーキ液を車輪ブレーキFL,RR,RL,FRに流すことを許容するとともに、ポンプ4が発生したブレーキ液圧によりホイールシリンダH側の圧力を増加するときには、この流れを遮断しつつ、ホイールシリンダH側の圧力を設定値以下に調節する機能を有している。具体的に、調圧弁Rは、切換弁6およびチェック弁6aを備えて構成されている。
【0044】
切換弁6は、マスタシリンダMCに通じる出力液圧路A1と各車輪ブレーキFL,FR,RL,RRに通じる車輪液圧路Bとの間に介設された常開型の比例電磁弁である。そのため、切換弁6に入力される駆動電流の値(指示電流値)に応じて閉弁力を任意に変更することで、切換弁6の上下流の差圧が調整されて、車輪液圧路Bの圧力を設定値以下に調節可能となっている。
【0045】
チェック弁6aは、各切換弁6に並列に接続されている。このチェック弁6aは、出力液圧路A1から車輪液圧路Bへのブレーキ液の流れを許容する一方向弁である。
【0046】
吸入弁7は、吸入液圧路Cに設けられた常閉型の電磁弁であり、吸入液圧路Cを開放する状態および遮断する状態を切り換えるものである。吸入弁7は、例えば、ポンプ4によって各車輪ブレーキFL,FR,RL,RR内の液圧を加圧するときに制御部20の制御により開弁される。
【0047】
次に、制御部20の詳細について説明する。
図3に示すように、制御部20は、横加速度センサ30、ヨーレートセンサ40、車輪速センサ50および舵角センサ60から入力された信号に基づき、制御弁手段V(入口弁1および出口弁2)などを制御することで、例えばアンチロックブレーキ制御を実行可能となっている。具体的に、制御部20は、旋回判定手段21と、アンチロックブレーキ制御手段22と、旋回状態判定手段23と、路面摩擦係数判定手段24とを備えて構成されている。
【0048】
旋回判定手段21は、舵角センサ60で検出した舵角に基づいて車両CRが旋回しているか否かを判定する機能を備えている。そして、旋回判定手段21は、車両が旋回していると判定すると、そのことを示す旋回信号をアンチロックブレーキ制御手段22に出力する。
【0049】
アンチロックブレーキ制御手段22は、4つの車輪速センサ50で検出された車輪速度に基づいて車体速度を算出するとともに、この車体速度から各車輪速度を減算することでスリップ関連量の一例としてのスリップ量を各車輪Wごとに算出する機能を有している。また、アンチロックブレーキ制御手段22は、スリップ量が減圧閾値に達したこと(詳しくは、スリップ量が減圧閾値よりも大きくなったこと)を条件として、車輪ブレーキFL,FR,RL,RRに付与するブレーキ液圧を減圧するアンチロックブレーキ制御を実行する機能を有している。
【0050】
そして、アンチロックブレーキ制御手段22は、アンチロックブレーキ制御を実行する際に、旋回判定手段21から旋回信号を受けている場合(旋回判定手段21によって車両が旋回していると判定された場合)には、減圧閾値を直進時の減圧閾値よりも減圧しやすい側に変更し、かつ、ブレーキ液圧の減圧量を直進時の減圧量よりも大きくするように変更する旋回減圧制御を実行するようになっている。具体的に、アンチロックブレーキ制御手段22は、図4および図5に示すように、旋回時の減圧閾値(例えば前輪側減圧閾値Sf2)を直進時の減圧閾値(例えば前輪側減圧閾値Sf1)よりも小さくする。
【0051】
また、アンチロックブレーキ制御手段22は、旋回時の減圧量(例えば前輪側減圧量Pf2)を直進時の減圧量(例えば前輪側減圧量Pf1)よりも大きくする。すなわち、アンチロックブレーキ制御手段22は、旋回時における出口弁2の開放時間を、直進時における開放時間T1よりも長い時間T2にする。
【0052】
これにより、車両CRが旋回している場合には、減圧閾値を直進時よりも小さくすることで減圧するタイミングを直進時のタイミング(時刻t1)よりも早いタイミング(時刻t2)にすることできるとともに、減圧量を直進時よりも大きくすることで車輪速度をいち早く車体速度に近づけることが可能となっている。そして、このように車輪速度をいち早く車体速度に近づけることで、大きな旋回力を発生させることができるので、これによって走行ラインのトレース性を向上させることが可能となっている。
【0053】
また、アンチロックブレーキ制御手段22は、前述した旋回減圧制御(直進時とは異なる減圧閾値・減圧量に設定する制御)を、後で詳述する路面摩擦係数判定手段24から低摩擦係数信号を受けているときのみに(路面が低摩擦係数路面であると判定された場合にのみに)実行するようになっている。これにより、車両CRが低摩擦係数路面(以下、「低μ路面」ともいう。)を旋回しているときは走行ラインのトレース性が特に悪化しやすいので、このような状況に特化して旋回減圧制御を実行することで、低μ路面において大きな旋回力を発生させて走行ラインのトレース性を向上させることが可能となっている。
【0054】
さらに、アンチロックブレーキ制御手段22は、後で詳述する旋回状態判定手段23によって判定される車両CRの旋回状態に応じて、前述した旋回減圧制御を行う対象となる車輪Wを変更する制御を実行するように構成されている。具体的に、アンチロックブレーキ制御手段22は、旋回状態判定手段23によってアンダーステア状態(以下、「US状態」ともいう。)であると判定されている場合には、前輪のみに対して旋回減圧制御を実行する。
【0055】
つまり、図6に示すように、US状態においては、前輪(フロント)の減圧閾値が直進時(白丸)の値Sf1よりも小さな値Sf3(黒丸)に設定され、前輪の減圧量が直進時の値Pf1よりも大きな値Pf3に設定される。これに対し、後輪(リア)の減圧閾値および減圧量は、ともに直進時の値Sr1,Pr1と同じ値に設定される。
【0056】
また、アンチロックブレーキ制御手段22は、旋回状態判定手段23によってニュートラルステア状態(以下、「NS状態」ともいう。)であると判定されている場合には、前輪および後輪に対して旋回減圧制御を実行する。つまり、NS状態においては、前後輪の減圧閾値が直進時の値Sf1,Sr1よりも小さな値Sf2,Sr2に設定され、前後輪の減圧量が直進時の値Pf1,Pr1よりも大きな値Pf2,Pr2に設定される。
【0057】
また、アンチロックブレーキ制御手段22は、旋回状態判定手段23によってオーバーステア状態(以下、「OS状態」ともいう。)であると判定されている場合には、後輪のみに対して旋回減圧制御を実行する。つまり、OS状態においては、後輪の減圧閾値が直進時の値Sr1よりも小さな値Sr3に設定され、後輪の減圧量が直進時の値Pr1よりも大きな値Pr3に設定される。これに対し、前輪の減圧閾値および減圧量は、ともに直進時の値Sf1,Pf1と同じ値に設定される。
【0058】
これにより、車両CRの旋回状態に応じて旋回減圧制御を行う対象となる車輪Wが切り替えられるので、車両CRの安定性を向上させながら大きな旋回力を発生させて走行ラインのトレース性を向上させることが可能となっている。
【0059】
さらに、US状態であるときに前輪のみに対して実行する旋回減圧制御では、減圧閾値が、NS状態であるときの前輪の減圧閾値Sf2よりも小さな値Sf3に設定されるとともに、減圧量が、NS状態であるときの前輪の減圧量Pf2よりも大きな値Pf3に設定されている。このようにUS状態における前輪の減圧閾値および減圧量をNS状態よりも大きく変更することで、図7(a)に示すように、前輪Wfにより大きな旋回力(サイドフォース:黒の矢印)が発生するので、US状態を解消しながら走行ラインのトレース性を向上させることが可能となっている。なお、図7において、黒の矢印は、旋回減圧制御によって車輪Wに加わるサイドフォース(横向きの矢印)および制動力(下向きの矢印)であり、白の矢印は、旋回減圧制御でない通常の減圧制御によって車輪Wに加わるサイドフォースおよび制動力を示す。
【0060】
また、図6に示すように、OS状態であるときに後輪のみに対して実行する旋回減圧制御でも、減圧閾値が、NS状態であるときの後輪の減圧閾値Sr2よりも小さな値Sr3に設定されるとともに、減圧量が、NS状態であるときの後輪の減圧量Pr2よりも大きな値Pr3に設定されている。このように後輪の減圧閾値および減圧量を大きく変更することで、図7(c)に示すように、後輪Wrにより大きなサイドフォースが発生するので、後輪Wrの横滑りが減少して、OS状態を解消しながら走行ラインのトレース性を向上させることが可能となっている。
【0061】
なお、図6に示すように、NS状態のときには、直進時に対する減圧閾値および減圧量の差が、前後輪で略同じに設定されているので、図7(b)に示すように、各車輪Wには、同程度の大きさの旋回力が働く。これにより、車両CRの横滑りを抑えることができ、走行ラインのトレース性を向上させることが可能となっている。
【0062】
より具体的に、アンチロックブレーキ制御手段22は、図8および図9に示すフローチャートに基づいてアンチロックブレーキ制御を実行する。図8に示すように、アンチロックブレーキ制御手段22は、まず、各車輪速センサ50から各車輪Wの車輪速度を取得し(S1)、各車輪速度に基づいて各車輪Wのスリップ量SLを演算する(S2)。
【0063】
ステップS2の後、アンチロックブレーキ制御手段22は、旋回状態判定手段23および路面摩擦係数判定手段24から出力されてくる信号に基づいて、減圧閾値および減圧量を設定する(S3)。なお、このステップS3における具体的な処理は、後で図9を用いて詳述する。
【0064】
ステップS3で減圧閾値と減圧量を設定した後、アンチロックブレーキ制御手段22は、車輪速度に基づいて算出される車輪加速度WAが0以下であるか否かを判断する(S4)。ステップS4において、車輪加速度WAが0以下である場合には(Yes)、アンチロックブレーキ制御手段22は、スリップ量SLがステップS3で設定した減圧閾値SLthを超えたか否かを判断する(S5)。
【0065】
ステップS5において、スリップ量SLが減圧閾値SLthを超えた場合には(Yes)、アンチロックブレーキ制御手段22は、ステップS3で設定した減圧量に基づいて減圧制御を実行する(S6)。また、ステップS5において、スリップ量SLが減圧閾値SLth以下である場合には(No)、アンチロックブレーキ制御手段22は、増圧制御を実行する(S7)。
【0066】
また、ステップS4において、車輪加速度WAが0よりも大きい場合には(No)、アンチロックブレーキ制御手段22は、保持制御を実行する(S8)。なお、ステップS6、ステップS7またはステップS8の後、アンチロックブレーキ制御手段22は、再度ステップS1に戻って、本制御を繰り返し実行する。
【0067】
図9に示すように、減圧閾値および減圧量を設定するステップS3の処理において、アンチロックブレーキ制御手段22は、まず、旋回判定手段21が車両CRが旋回していると判定したことを示す旋回信号を受けているか否かを判定する(S11)。ステップS11において、旋回信号を受けていないと判定した場合には(No)、アンチロックブレーキ制御手段22は、前側減圧閾値FSLth、後側減圧閾値RSLth、前側減圧量FPおよび後側減圧量RPを、図6のようなマップに基づいて、直進時における前輪の減圧閾値Sf1、後輪の減圧閾値Sr1、前輪の減圧量Pf1および後輪の減圧量Pr1に設定する。
【0068】
また、ステップS11において、旋回信号を受けていると判定した場合には(Yes)、アンチロックブレーキ制御手段22は、後述する路面摩擦係数判定手段24から低摩擦係数信号を受けているか否かを判定する(S13)。ステップS13において、低摩擦係数信号を受けていないと判定した場合には(No)、アンチロックブレーキ制御手段22は、前側減圧閾値FSLth等を直進時と同じ値Sf1等に設定する(S12)。
【0069】
ステップS13において、低摩擦係数信号を受けていると判定した場合には(Yes)、アンチロックブレーキ制御手段22は、後述する旋回状態判定手段23が判定した車両CRの旋回状態がNS状態か否かを判定する(S14)。ステップS14において、旋回状態判定手段23が判定した旋回状態がNS状態であると判定した場合には(Yes)、アンチロックブレーキ制御手段22は、前側減圧閾値FSLth、後側減圧閾値RSLth、前側減圧量FPおよび後側減圧量RPを、図6のようなマップに基づいて、NS状態時における前輪の減圧閾値Sf2、後輪の減圧閾値Sr2、前輪の減圧量Pf2および後輪の減圧量Pr2に設定する(S15)。
【0070】
また、ステップS14において、旋回状態判定手段23が判定した旋回状態がNS状態でないと判定した場合には(No)、アンチロックブレーキ制御手段22は、旋回状態判定手段23が判定した旋回状態がOS状態か否かを判定する(S16)。ステップS16において、旋回状態判定手段23が判定した旋回状態がOS状態であると判定した場合には(Yes)、アンチロックブレーキ制御手段22は、前側減圧閾値FSLth、後側減圧閾値RSLth、前側減圧量FPおよび後側減圧量RPを、図6のようなマップに基づいて、OS状態時における前輪の減圧閾値Sf1、後輪の減圧閾値Sr3、前輪の減圧量Pf1および後輪の減圧量Pr3に設定する(S17)。
【0071】
また、ステップS16において、旋回状態判定手段23が判定した旋回状態がOS状態でないと判定した場合には(No)、アンチロックブレーキ制御手段22は、前側減圧閾値FSLth、後側減圧閾値RSLth、前側減圧量FPおよび後側減圧量RPを、図6のようなマップに基づいて、US状態時における前輪の減圧閾値Sf3、後輪の減圧閾値Sr1、前輪の減圧量Pf3および後輪の減圧量Pr1に設定する(S18)。
【0072】
図3に示すように、旋回状態判定手段23は、車両CRがアンダーステア状態、ニュートラルステア状態、オーバーステア状態のいずれであるかを判定する機能を有している。具体的に、旋回状態判定手段23は、規範ヨーレート算出部23Aと、路面限界ヨーレート算出部23Bと、目標ヨーレート算出部23Cを備えている。なお、以下の説明では、図3とともに図10も参照して説明する。
【0073】
規範ヨーレート算出部23Aは、舵角センサ60から取得した舵角と、車輪速センサ50から取得した車輪速度から算出される車体速度とを用いて規範ヨーレートY1を算出する機能を有している。具体的には、規範ヨーレート算出部23Aは、車輪速センサ50からの信号に基づいて算出される車体速度に、第1マップMP1から算出される係数を乗算し、その値と舵角センサ60から取得した舵角とを演算(例えば乗算)して、規範ヨーレートY1を算出する。ここで、第1マップMP1は、車体速度と係数との関係を示すマップであり、実験やシミュレーション等によって適宜設定される。
【0074】
路面限界ヨーレート算出部23Bは、横加速度センサ30から取得した実横加速度と、車輪速センサ50から取得した車輪速度から算出される車体速度から決まる路面限界ヨーレートY2を算出する機能を有している。具体的には、路面限界ヨーレート算出部23Bは、横加速度センサ30から取得した実横加速度の絶対値を、減少側にのみ変化させにくくするフィルタ処理を行うことで得られる横加速度フィルタ値から第2マップMP2に基づいて算出される値と、車体速度を演算(例えば除算)して、路面限界ヨーレートY2を算出する。
【0075】
ここで、フィルタ処理は、例えば「横加速度の絶対値」が前回値より所定量以上小さくなっているときは、今回の「横加速度の絶対値」を前回値から所定量だけ小さくした値とすることで行われる。また、第2マップMP2は、横加速度フィルタ値と路面限界ヨーレートとの関係を示すマップであり、実験やシミュレーション等によって適宜設定される。
【0076】
目標ヨーレート算出部23Cは、規範ヨーレート算出部23Aで算出した規範ヨーレートY1と、路面限界ヨーレート算出部23Bで算出した路面限界ヨーレートY2とから目標ヨーレートY3を算出する機能を有している。具体的には、目標ヨーレート算出部23Cは、規範ヨーレートY1を路面限界ヨーレートY2でリミット処理、すなわち、規範ヨーレートY1と路面限界ヨーレートY2のうち小さい方のヨーレートを目標ヨーレートY3とする機能を有している。
【0077】
そして、旋回状態判定手段23は、図10の右側のグラフに示すように、目標ヨーレート算出部23Cで算出した目標ヨーレートY3と、ヨーレートセンサ40から取得した車両CRに実際に作用する実ヨーレートY4とを比較する。旋回状態判定手段23は、実ヨーレートY4が、目標ヨーレートY3から第1の所定値α1を減算した値Y5よりも小さい場合には、車両CRがUS状態であると判定する(時刻t10〜t11間)。
【0078】
旋回状態判定手段23は、実ヨーレートY4が目標ヨーレートY3に第2の所定値α2を加算した値Y6よりも大きい場合には、車両CRがOS状態であると判定する(時刻t12以降)。旋回状態判定手段23は、実ヨーレートY4が値Y5〜Y6の範囲である場合(すなわち、US状態およびOS状態と判定しなかった場合)には、車両CRがNS状態であると判定する(時刻t11〜t12間)。
【0079】
これにより、目標ヨーレートY3と実ヨーレートY4との偏差に基づいて容易に車両CRの旋回状態を切り分けることができるとともに、車種に応じて第1の所定値α1や第2の所定値α2を変更すれば、車種に応じてより適した制御を行うことが可能となっている。
【0080】
図3に示すように、路面摩擦係数判定手段24は、路面が少なくとも低μ路面であるか否かを判定し、低μ路面と判定した場合には、そのことを示す低摩擦係数信号をアンチロックブレーキ制御手段22に出力する機能を有している。具体的に、路面摩擦係数判定手段24は、第1の推定手段25と、第2の推定手段26と、選択手段27と、低μ路判定手段28とを備えて構成されている。なお、以下の説明では、図3とともに図11も参照して説明する。
【0081】
第1の推定手段25は、横加速度センサ30から取得した実横加速度(図11では「横G」で示す)に基づいて第1の路面摩擦係数CF1を推定する機能を有している。具体的に、第1の推定手段25は、実横加速度の絶対値を減少側にのみ変化させにくくするフィルタ処理(前述したフィルタ処理と同様の処理)を行うことで得られる横加速度フィルタ値と、マップMP3とから第1の路面摩擦係数CF1を算出している。
【0082】
ここで、マップMP3は、横加速度フィルタ値と路面μとの関係を示すマップであり、実験やシミュレーション等によって適宜設定される。このように、実横加速度の絶対値をフィルタ処理することで、外乱などによって実横加速度が変動したり、ハンドルを切り返したりすることに起因して、第1の路面摩擦係数CF1を誤って小さく推定しまうことを防止することが可能となっている。
【0083】
第2の推定手段26は、車輪速度から算出した車輪加速度(前後加速度)に基づいて第2の路面摩擦係数CF2を推定する機能を有している。なお、車輪加速度に基づいて路面摩擦係数を推定する技術は、公知であるため、その説明は省略する。
【0084】
選択手段27は、第1の路面摩擦係数CF1と第2の路面摩擦係数CF2とのうちいずれか一方を路面摩擦係数CFとして選択する機能を有している。具体的に、選択手段27は、限界操舵判定部27Bを有している。
【0085】
限界操舵判定部27Bは、舵角センサ60から取得した舵角と、横加速度センサ30から取得した実横加速度と、車輪速センサ50から取得した車輪速度に基づいて算出した車体速度とに基づいて、路面限界を超える操舵(車両CRが走行する路面の摩擦係数において発生し得る最大の横加速度よりも大きな横加速度を発生させるような操舵)が行われているか否かを判定する機能を有している。具体的に、限界操舵判定部27Bは、規範ヨーレート算出部B1と、路面限界ヨーレート算出部B2と、目標ヨーレート算出部B3と、ヨーレート判定部B4とを備えている。
【0086】
規範ヨーレート算出部B1は、前述した規範ヨーレート算出部23Aと同様の機能、すなわち舵角と車体速度とから規範ヨーレートY1の絶対値を算出する機能を有している。
【0087】
路面限界ヨーレート算出部B2は、前述した路面限界ヨーレート算出部23Bと同様の機能、すなわち実横加速度と車体速度から決まる最大のヨーレートを路面限界ヨーレートY2の絶対値として算出する機能を有している。
【0088】
目標ヨーレート算出部B3は、前述した目標ヨーレート算出部23Cと同様の機能、すなわち規範ヨーレートY1の絶対値と路面限界ヨーレートY2の絶対値のうち小さい方を目標ヨーレートY3の絶対値として算出する機能を有している。
【0089】
なお、規範ヨーレート算出部B1、路面限界ヨーレート算出部B2、目標ヨーレート算出部B3は、それぞれ前述した規範ヨーレート算出部23A、路面限界ヨーレート算出部23B、目標ヨーレート算出部23Cと同一であってもよいし、各フィルタの強さや各マップの設定を異ならせた別個のものであってもよい。
【0090】
ヨーレート判定部B4は、規範ヨーレートY1の絶対値から目標ヨーレートY3を減算した値Y7が正の所定値βよりも大きいか否かを判定することで、実質、規範ヨーレートY1が路面限界ヨーレートY2よりも所定値βだけ大きいか否かを判定する機能を有している。なぜなら、Y7=Y1−Y3であり、Y3=MIN(Y1,Y2)だからである。そして、限界操舵判定部27Bは、値Y7が正の所定値βよりも大きい場合(Y1>Y2+βの場合)には、路面限界を超える操舵が行われていると判定し、値Y7が正の所定値β以下の場合(Y1≦Y2+βの場合)には、路面限界を超える操舵が行われていないと判定する。
【0091】
これにより、純粋にドライバの操舵(舵角)に対応した値である規範ヨーレートY1と、現在の実横加速度と車体速度から決まる路面限界ヨーレートY2に関連した目標ヨーレートY3とを用いて、路面限界を超える操舵時か否かを的確に判定することが可能となっている。
【0092】
そして、選択手段27は、ヨーレート判定部B4で路面限界を超える操舵が行われていると判定したときは、第1の路面摩擦係数CF1を選択し、当該第1の路面摩擦係数CF1と第2の路面摩擦係数CF2とのうちいずれか小さい方を路面摩擦係数CFとして選択する(図11の「低μセレクト」参照)。また、選択手段27は、路面限界を超える操舵が行われていないと判定したときは、第2の路面摩擦係数CF2が路面摩擦係数CFとして選択されるような高摩擦係数CF12を選択することで、次の「低μセレクト」の工程で第2の路面摩擦係数CF2を路面摩擦係数CFとして選択する。
【0093】
これにより、路面限界を超える操舵時にのみ実横加速度から推定した第1の路面摩擦係数CF1が選択可能となるので、最大横加速度が発生していない状態で実横加速度を利用することを防止することができ、路面摩擦係数CFを精度よく推定して、この路面摩擦係数CFから低μ路面か否かを適切に判定することが可能となっている。
【0094】
低μ路判定手段28は、車両CRが走行している路面が低μ路面であるか否かを判定する機能を有している。具体的に、低μ路判定手段28は、第1判定部28Aと、第2判定部28Bと、第3判定部28Cとを備えて構成されている。
【0095】
第1判定部28Aは、選択手段27で選択した路面摩擦係数CFが所定値γ1(第3の所定値)よりも小さいという第1の条件を満たすか否かを判定する機能を有している。
【0096】
第2判定部28Bは、ヨーレートセンサ40から取得した実ヨーレートの絶対値に基づいて算出した推定横加速度Gsが所定値γ2よりも小さいという第2の条件を満たすか否かを判定する機能を有している。具体的に、第2判定部28Bは、実ヨーレートの絶対値と車体速度とから仮推定横加速度G1を算出し、当該仮推定横加速度G1に対して、減少側にのみ変化させにくくするフィルタ処理(前述したフィルタ処理と同様の処理)を行って推定横加速度Gsを算出している。
【0097】
ここで、実ヨーレートの絶対値と車体速度とから仮推定横加速度G1を算出する方法としては、例えば「仮推定横加速度=車体速度×角速度(ヨーレートをrad単位に変更した値)」という式を用いて算出する方法が挙げられる。
【0098】
このようにして推定横加速度Gsを算出することによって、外乱などによってヨーレートが変動したり、ハンドルを切り返したりすることに起因して、推定横加速度Gsを誤って小さく推定しまうことを防止することが可能となっている。
【0099】
第3判定部28Cは、アンチロックブレーキ制御で減圧するときの左右の前輪のそれぞれのロック液圧(減圧制御が開始された時点のホイールシリンダH内のブレーキ液圧)が所定値γ3,γ4よりもそれぞれ小さいという第3の条件を満たすか否かを判定する機能を有している。ここで、所定値γ3,γ4は、同一の値であってもよいし、異なる値であってもよい。
【0100】
このように、制動時に荷重がかかるために路面の影響を受けやすい前輪のロック液圧を用いて、また、左右輪のロック液圧を個別に判定することで、ロック液圧に基づく低μ路面の判定を確実に行うことが可能となっている。
【0101】
そして、低μ路判定手段28は、第1の条件、第2の条件および第3の条件のすべてを満たしたときに、低μ路面であると判定するようになっている。これにより、路面が低μ路面であるか否かを、選択手段27で選んだ路面摩擦係数CFだけでなく、他の条件(実ヨーレートから推定する推定横加速度Gsが小さいこと、または、ロック液圧が小さいこと)も用いて判断するので、低μ路面の判定をより正確に行うことが可能となっている。
【0102】
また、このように横加速度センサ30等より求める路面摩擦係数CFだけでなく、他の条件も用いて判断するので、例えば横加速度センサ30が故障していることに起因して路面摩擦係数CFが誤った値に推定される場合であっても、誤った値であることを、他の条件(推定横加速度Gsの条件、または、ロック液圧の条件)から判断することが可能となっている。
【0103】
なお、本発明は前記実施形態に限定されることなく、以下に例示するように様々な形態で利用できる。
前記実施形態では、US状態において左右の前輪の減圧閾値をそれぞれ同じ値Sf3としたが、本発明はこれに限定されず、図12に示すように、US状態であるときに前輪のみに対して実行する旋回減圧制御では、旋回外輪の減圧閾値を、旋回内輪の減圧閾値Sf3よりも小さい値Sf4(減圧しやすい側の値)に設定してもよい。このように車体荷重が大きくかかる旋回外輪の減圧閾値を旋回内輪よりも小さくすることで、旋回外輪の旋回力を有効に利用して、よりUS状態を解消しやすくすることができる。
【0104】
なお、これと同様に、OS状態において、後輪の旋回外輪の減圧閾値を、旋回内輪の減圧閾値よりも減圧しやすい側に設定してもよい。この場合も、車体荷重が大きくかかる旋回外輪の旋回力を有効に利用して、よりOS状態を解消しやすくすることができる。
【0105】
前記実施形態では、スリップ関連量をスリップ量としたが、本発明はこれに限定されず、例えばスリップ率などであってもよい。
【0106】
前記実施形態では、安全を見て所定値βを正の値に設定したが、本発明はこれに限定されず、所定値βはゼロに設定されていてもよいし、単に、ヨーレート判定部は、規範ヨーレートが路面限界ヨーレートよりも大きいか否を判定するように構成されていてもよい。
【0107】
前記実施形態では、第2判定部28Bと第3判定部28Cの両方を設けるようにしたが、本発明はこれに限定されず、第2判定部28Bと第3判定部28Cのいずれか一方だけでよい。なお、この場合には、第1の条件と、第2の条件(または第3の条件)との2つの条件を満たしたときに、低μ路面であると判定すればよい。
【0108】
前記実施形態では、高摩擦係数CF12を利用することで、路面限界を超える操舵が行われていないと判定したときに、第2の路面摩擦係数CF2を路面摩擦係数CFとして選択するように構成したが、本発明はこれに限定されるものではない。例えば、路面限界を超える操舵が行われていないと判定したときに、第1の路面摩擦係数を無視して、第2の路面摩擦係数を選択するように選択手段を構成してもよい。
【符号の説明】
【0109】
20 制御部
21 旋回判定手段
22 アンチロックブレーキ制御手段
100 車両用ブレーキ液圧制御装置
CR 車両
FL,FR,RL,RR 車輪ブレーキ
【特許請求の範囲】
【請求項1】
車体速度と車輪速度とを用いて算出するスリップ関連量が減圧閾値に達したことを条件として、車輪ブレーキに付与するブレーキ液圧を減圧するアンチロックブレーキ制御を実行するアンチロックブレーキ制御手段を有する車両用ブレーキ液圧制御装置において、
舵角に基づいて車両が旋回しているか否かを判定する旋回判定手段を備え、
前記アンチロックブレーキ制御手段は、アンチロックブレーキ制御を実行する際に、前記旋回判定手段によって車両が旋回していると判定された場合には、前記減圧閾値を直進時の減圧閾値よりも減圧しやすい側に変更し、かつ、ブレーキ液圧の減圧量を直進時の減圧量よりも大きくするように変更する旋回減圧制御を実行することを特徴とする車両用ブレーキ液圧制御装置。
【請求項2】
車両がアンダーステア状態、ニュートラルステア状態、オーバーステア状態のいずれであるかを判定する旋回状態判定手段をさらに備え、
前記アンチロックブレーキ制御手段は、
前記旋回状態判定手段によってアンダーステア状態であると判定されている場合には、前輪のみに対して前記旋回減圧制御を実行し、
前記旋回状態判定手段によってニュートラルステア状態であると判定されている場合には、前輪および後輪に対して前記旋回減圧制御を実行し、
前記旋回状態判定手段によってオーバーステア状態であると判定されている場合には、後輪のみに対して前記旋回減圧制御を実行することを特徴とする請求項1に記載の車両用ブレーキ液圧制御装置。
【請求項3】
アンダーステア状態であるときに前輪のみに対して実行する旋回減圧制御では、
前記減圧閾値が、ニュートラルステア状態であるときの前輪の減圧閾値よりも減圧しやすい側に設定されるとともに、
前記減圧量が、ニュートラルステア状態であるときの前輪の減圧量よりも大きくなるように設定されていることを特徴とする請求項2に記載の車両用ブレーキ液圧制御装置。
【請求項4】
アンダーステア状態であるときに前輪のみに対して実行する旋回減圧制御では、
旋回外輪の減圧閾値が、旋回内輪の減圧閾値よりも減圧しやすい側に設定されていることを特徴とする請求項2または請求項3に記載の車両用ブレーキ液圧制御装置。
【請求項5】
オーバーステア状態であるときに後輪のみに対して実行する旋回減圧制御では、
前記減圧閾値が、ニュートラルステア状態であるときの後輪の減圧閾値よりも減圧しやすい側に設定されるとともに、
前記減圧量が、ニュートラルステア状態であるときの後輪の減圧量よりも大きくなるように設定されていることを特徴とする請求項2〜請求項4のいずれか1項に記載の車両用ブレーキ液圧制御装置。
【請求項6】
前記旋回状態判定手段は、舵角と車体速度とを用いて規範ヨーレートを算出する規範ヨーレート算出部と、横加速度と車体速度を用いて路面限界ヨーレートを算出する路面限界ヨーレート算出部と、前記規範ヨーレートおよび前記路面限界ヨーレートから目標ヨーレートを算出する目標ヨーレート算出部と、を備えており、
前記目標ヨーレートと車両に実際に作用する実ヨーレートとを比較して、
前記実ヨーレートが前記目標ヨーレートから第1の所定値を減算した値よりも小さい場合は、車両がアンダーステア状態であると判定し、
前記実ヨーレートが前記目標ヨーレートに第2の所定値を加算した値よりも大きい場合には、車両がオーバーステア状態であると判定し、
アンダーステア状態およびオーバーステア状態と判定されなかった場合は、車両がニュートラルステア状態であると判定することを特徴とする請求項2〜請求項5のいずれか1項に記載の車両用ブレーキ液圧制御装置。
【請求項7】
前記スリップ関連量は、前記車体速度から前記車輪速度を減算したスリップ量であり、
前記アンチロックブレーキ制御手段は、前記スリップ量が前記減圧閾値よりも大きくなったときに、車輪ブレーキに付与するブレーキ液圧を減圧することを特徴とする請求項1〜請求項6のいずれか1項に記載の車両用ブレーキ液圧制御装置。
【請求項8】
路面が少なくとも低摩擦係数路面であるか否かを判定する路面摩擦係数判定手段をさらに備え、
前記アンチロックブレーキ制御手段は、路面が低摩擦係数路面であると判定された場合にのみ、前記旋回減圧制御を実行することを特徴とする請求項1〜請求項7のいずれか1項に記載の車両用ブレーキ液圧制御装置。
【請求項9】
前記路面摩擦係数判定手段は、横加速度に基づいて第1の路面摩擦係数を推定する第1の推定手段と、前後加速度に基づいて第2の路面摩擦係数を推定する第2の推定手段と、前記第1の路面摩擦係数と前記第2の路面摩擦係数とのうちいずれか一方を路面摩擦係数として選択する選択手段と、当該選択手段で選択した路面摩擦係数が第3の所定値よりも小さいときに、路面が低摩擦係数路面であると判定する低μ路判定手段と、を備え、
前記選択手段は、
少なくとも舵角と車体速度とに基づいて路面限界を超える操舵が行われているか否かを判定する限界操舵判定部を有し、
路面限界を超える操舵が行われていると判定したときは、前記第1の路面摩擦係数と前記第2の路面摩擦係数とのうちいずれか小さい方を路面摩擦係数として選択し、路面限界を超える操舵が行われていないと判定したときは、前記第2の路面摩擦係数を路面摩擦係数として選択することを特徴とする請求項8に記載の車両用ブレーキ液圧制御装置。
【請求項1】
車体速度と車輪速度とを用いて算出するスリップ関連量が減圧閾値に達したことを条件として、車輪ブレーキに付与するブレーキ液圧を減圧するアンチロックブレーキ制御を実行するアンチロックブレーキ制御手段を有する車両用ブレーキ液圧制御装置において、
舵角に基づいて車両が旋回しているか否かを判定する旋回判定手段を備え、
前記アンチロックブレーキ制御手段は、アンチロックブレーキ制御を実行する際に、前記旋回判定手段によって車両が旋回していると判定された場合には、前記減圧閾値を直進時の減圧閾値よりも減圧しやすい側に変更し、かつ、ブレーキ液圧の減圧量を直進時の減圧量よりも大きくするように変更する旋回減圧制御を実行することを特徴とする車両用ブレーキ液圧制御装置。
【請求項2】
車両がアンダーステア状態、ニュートラルステア状態、オーバーステア状態のいずれであるかを判定する旋回状態判定手段をさらに備え、
前記アンチロックブレーキ制御手段は、
前記旋回状態判定手段によってアンダーステア状態であると判定されている場合には、前輪のみに対して前記旋回減圧制御を実行し、
前記旋回状態判定手段によってニュートラルステア状態であると判定されている場合には、前輪および後輪に対して前記旋回減圧制御を実行し、
前記旋回状態判定手段によってオーバーステア状態であると判定されている場合には、後輪のみに対して前記旋回減圧制御を実行することを特徴とする請求項1に記載の車両用ブレーキ液圧制御装置。
【請求項3】
アンダーステア状態であるときに前輪のみに対して実行する旋回減圧制御では、
前記減圧閾値が、ニュートラルステア状態であるときの前輪の減圧閾値よりも減圧しやすい側に設定されるとともに、
前記減圧量が、ニュートラルステア状態であるときの前輪の減圧量よりも大きくなるように設定されていることを特徴とする請求項2に記載の車両用ブレーキ液圧制御装置。
【請求項4】
アンダーステア状態であるときに前輪のみに対して実行する旋回減圧制御では、
旋回外輪の減圧閾値が、旋回内輪の減圧閾値よりも減圧しやすい側に設定されていることを特徴とする請求項2または請求項3に記載の車両用ブレーキ液圧制御装置。
【請求項5】
オーバーステア状態であるときに後輪のみに対して実行する旋回減圧制御では、
前記減圧閾値が、ニュートラルステア状態であるときの後輪の減圧閾値よりも減圧しやすい側に設定されるとともに、
前記減圧量が、ニュートラルステア状態であるときの後輪の減圧量よりも大きくなるように設定されていることを特徴とする請求項2〜請求項4のいずれか1項に記載の車両用ブレーキ液圧制御装置。
【請求項6】
前記旋回状態判定手段は、舵角と車体速度とを用いて規範ヨーレートを算出する規範ヨーレート算出部と、横加速度と車体速度を用いて路面限界ヨーレートを算出する路面限界ヨーレート算出部と、前記規範ヨーレートおよび前記路面限界ヨーレートから目標ヨーレートを算出する目標ヨーレート算出部と、を備えており、
前記目標ヨーレートと車両に実際に作用する実ヨーレートとを比較して、
前記実ヨーレートが前記目標ヨーレートから第1の所定値を減算した値よりも小さい場合は、車両がアンダーステア状態であると判定し、
前記実ヨーレートが前記目標ヨーレートに第2の所定値を加算した値よりも大きい場合には、車両がオーバーステア状態であると判定し、
アンダーステア状態およびオーバーステア状態と判定されなかった場合は、車両がニュートラルステア状態であると判定することを特徴とする請求項2〜請求項5のいずれか1項に記載の車両用ブレーキ液圧制御装置。
【請求項7】
前記スリップ関連量は、前記車体速度から前記車輪速度を減算したスリップ量であり、
前記アンチロックブレーキ制御手段は、前記スリップ量が前記減圧閾値よりも大きくなったときに、車輪ブレーキに付与するブレーキ液圧を減圧することを特徴とする請求項1〜請求項6のいずれか1項に記載の車両用ブレーキ液圧制御装置。
【請求項8】
路面が少なくとも低摩擦係数路面であるか否かを判定する路面摩擦係数判定手段をさらに備え、
前記アンチロックブレーキ制御手段は、路面が低摩擦係数路面であると判定された場合にのみ、前記旋回減圧制御を実行することを特徴とする請求項1〜請求項7のいずれか1項に記載の車両用ブレーキ液圧制御装置。
【請求項9】
前記路面摩擦係数判定手段は、横加速度に基づいて第1の路面摩擦係数を推定する第1の推定手段と、前後加速度に基づいて第2の路面摩擦係数を推定する第2の推定手段と、前記第1の路面摩擦係数と前記第2の路面摩擦係数とのうちいずれか一方を路面摩擦係数として選択する選択手段と、当該選択手段で選択した路面摩擦係数が第3の所定値よりも小さいときに、路面が低摩擦係数路面であると判定する低μ路判定手段と、を備え、
前記選択手段は、
少なくとも舵角と車体速度とに基づいて路面限界を超える操舵が行われているか否かを判定する限界操舵判定部を有し、
路面限界を超える操舵が行われていると判定したときは、前記第1の路面摩擦係数と前記第2の路面摩擦係数とのうちいずれか小さい方を路面摩擦係数として選択し、路面限界を超える操舵が行われていないと判定したときは、前記第2の路面摩擦係数を路面摩擦係数として選択することを特徴とする請求項8に記載の車両用ブレーキ液圧制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−86751(P2013−86751A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−231712(P2011−231712)
【出願日】平成23年10月21日(2011.10.21)
【出願人】(000226677)日信工業株式会社 (840)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月21日(2011.10.21)
【出願人】(000226677)日信工業株式会社 (840)
【Fターム(参考)】
[ Back to top ]