
車両用ブレーキ装置

【課題】 ブレーキペダルのストロークと、ストロークセンサの出力との線形性およびゲインを高める。
【解決手段】 ブレーキペダル12のストロークを検出するストロークセンサScが、ペダル回動軸12bとは軸心を異にして平行に配置されるセンサ回動軸74と、ペダルアーム12cの回動によりセンサ回動軸74まわりに回動するセンサアーム75とを備えており、ストロークセンサScの分解能を他の領域よりも高く設定する領域にあるときに、ペダルアーム12cの回動軌跡の接線T1とセンサアーム75の回動軌跡の接線T2とが平行になるようにしたので、ストロークセンサScに高い検出精度が要求とされるときに、ストロークセンサScの出力特性の線形性を高めて誤差の発生を最小限に抑えることができるだけでなく、ストロークセンサScの取り付け位置にバラツキがあっても、出力特性の変化を最小限に抑えてブレーキフィールを高めることができる。
【解決手段】 ブレーキペダル12のストロークを検出するストロークセンサScが、ペダル回動軸12bとは軸心を異にして平行に配置されるセンサ回動軸74と、ペダルアーム12cの回動によりセンサ回動軸74まわりに回動するセンサアーム75とを備えており、ストロークセンサScの分解能を他の領域よりも高く設定する領域にあるときに、ペダルアーム12cの回動軌跡の接線T1とセンサアーム75の回動軌跡の接線T2とが平行になるようにしたので、ストロークセンサScに高い検出精度が要求とされるときに、ストロークセンサScの出力特性の線形性を高めて誤差の発生を最小限に抑えることができるだけでなく、ストロークセンサScの取り付け位置にバラツキがあっても、出力特性の変化を最小限に抑えてブレーキフィールを高めることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ブレーキペダルと、前記ブレーキペダルのストロークを検出するストロークセンサと、前記ストロークセンサの検出値に基づいて制動力を発生する制動力発生手段とを備える車両用ブレーキ装置に関する。
【背景技術】
【0002】
ブレーキペダルのストロークを、ブレーキペダルの回動に連動して回動するストロークセンサを用いて検出するものにおいて、ブレーキペダルが操作されていないときのストロークセンサの出力電圧が基準電圧に一致しない場合に、前記出力電圧が基準電圧に一致するようにゼロ点補正を行うものが、下記特許文献1により公知である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−322689号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
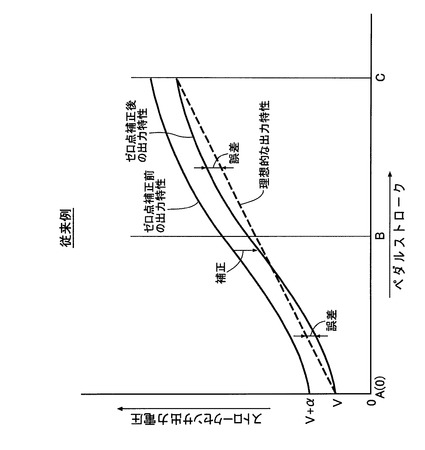
図9のグラフは従来のゼロ点補正の手法を示すもので、横軸はブレーキペダルのストローク、縦軸はストロークセンサの出力電圧である。ペダルストロークがゼロから増加するとストロークセンサの出力電圧も増加するが、ペダルストロークがゼロのときの出力電圧は予め決められた所定値Vに一致している必要がある。しかしながら、ブレーキペダルが操作されていない初点位置Aのずれや、ブレーキペダルとストロークセンサとの連結部分の寸法誤差等により、ペダルストロークがゼロのときの出力電圧は所定値Vに一致せず、V±αの電圧が出力される場合がある。ブレーキペダルが初点位置Aにあるとき、ストロークセンサの出力電圧は本来はVでなくてはならないが、それがV±αになると、例えば、ペダルストロークがゼロでなくてもゼロであると誤認識されてしまう等の問題がある。そこで、ペダルストロークがゼロのときの出力電圧がV±αである場合には、その出力電圧V±αからαを減算あるいは加算する補正(ゼロ点補正)を行うことで、上記問題を解消することができる。
【0005】
ところで、ブレーキペダルのペダルストロークが増加すると、それに応じてストロークセンサの出力電圧がリニアに増加することが望ましいが(図9の破線の出力特性参照)、ブレーキペダルのペダル回動軸とストロークセンサのセンサ回動軸とが異なる位置に配置されていると、ブレーキペダルのペダルストロークとストロークセンサの出力電圧との関係がリニアにならず、ストロークセンサの出力電圧に誤差が発生する問題があり、この誤差は前記ゼロ点補正では解消することが不能である。
【0006】
本発明は前述の事情に鑑みてなされたもので、ブレーキペダルのストロークと、ストロークセンサの出力との線形性およびゲインを高めることを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、請求項1に記載された発明によれば、ブレーキペダルと、前記ブレーキペダルのストロークを検出するストロークセンサと、前記ストロークセンサの検出値に基づいて制動力を発生する制動力発生手段とを備え、前記ブレーキペダルは、運転者により操作されるペダル部と、前記ペダル部を車体に回動可能に支持するペダル回動軸と、前記ペダル部の回動に応じて前記ペダル回動軸まわりに回動するペダルアームとを備え、前記ストロークセンサは、前記ペダル回動軸とは軸心を異にして平行に配置されるセンサ回動軸と、前記ペダルアームの回動により前記センサ回動軸まわりに回動するセンサアームとを備える車両用ブレーキ装置において、前記ブレーキペダルのストロークの中で、前記ストロークセンサの分解能を他の領域よりも高く設定する領域で、前記ペダルアームの回動軌跡の接線と前記センサアームの回動軌跡の接線とが平行になるように、前記ペダルアームおよび前記センサアームを配置したことを特徴とする車両用ブレーキ装置が提案される。
【0008】
また請求項2に記載された発明によれば、請求項1の構成に加えて、前記ストロークセンサの分解能を他の領域よりも高く設定する領域は、前記センサアームが、前記ブレーキペダルが操作されていないときの初点位置と、前記ブレーキペダルが所定量操作されたときの終点位置との間の中間位置に存在する領域であることを特徴とするブレーキ装置が提案される。
【0009】
また請求項3に記載された発明によれば、請求項1または請求項2の構成に加えて、前記ペダルアームと前記センサアームとの間に介在するリンク手段を備え、前記ストロークセンサの分解能を他の領域よりも高く設定する領域にあるときに、前記ペダル回動軸、前記センサ回動軸および前記リンク手段が一つの直線上に位置することを特徴とする車両用ブレーキ装置が提案される。
【0010】
また請求項4に記載された発明によれば、請求項1〜請求項3の何れか1項の構成に加えて、前記センサアームは、前記リンク手段が摺動自在に係合するガイド溝を備え、前記ストロークセンサの分解能を他の領域よりも高く設定する領域にあるときに、前記ガイド溝は前記直線と平行になるように配置されることを特徴とする車両用ブレーキ装置が提案される。
【0011】
また請求項5に記載された発明によれば、請求項2の構成に加えて、前記制動力発生手段は、前記ブレーキペダルの操作に応じてブレーキ液圧を発生するマスタシリンダと、前記マスタシリンダに接続されて前記ブレーキペダルに擬似的な操作反力を付与するストロークシミュレータと、少なくとも前記ブレーキペダルの操作に応じた電気信号によりブレーキ液圧を発生するスレーブシリンダとを備え、前記ストロークシミュレータは、前記ブレーキペダルの操作に基づいて操作反力を発生するとともに、前記終点位置は前記ストロークシミュレータの最大ストローク位置に対応することを特徴とする車両用ブレーキ装置が提案される。
【0012】
また請求項6に記載された発明によれば、請求項5の構成に加えて、前記マスタシリンダが発生するブレーキ液圧を検出する液圧センサを備え、前記ストロークシミュレータが最大ストローク位置に達するまでの前記ブレーキペダルのストロークを前記ストロークセンサにより検出し、前記ストロークシミュレータが最大ストローク位置に達した後の前記ブレーキペダルのストロークを前記液圧センサにより検出することを特徴とする車両用ブレーキ装置が提案される。
【0013】
また請求項7に記載された発明によれば、請求項1〜請求項6の何れか1項の構成に加えて、前記ペダルアームおよび前記センサアームの連結が解除されたときに、前記センサアームが前記ペダル回動軸まわりに回動する領域を覆うカバーを設けたことを特徴とする車両用ブレーキ装置が提案される。
【0014】
尚、実施の形態のピン72は本発明のリンク手段に対応し、実施の形態の第1液圧センサSaは本発明の液圧センサに対応する。
【発明の効果】
【0015】
請求項1の構成によれば、ブレーキペダルのストロークを検出するストロークセンサが、ブレーキペダルのペダル部およびペダルアームを回動可能に支持するペダル回動軸とは軸心を異にして平行に配置されるセンサ回動軸と、ペダルアームの回動によりセンサ回動軸まわりに回動するセンサアームとを備えており、ストロークセンサの分解能を他の領域よりも高く設定する領域にあるときに、ペダルアームの回動軌跡の接線とセンサアームの回動軌跡の接線とが平行になるようにペダルアームおよびセンサアームを配置したので、ストロークセンサに高い検出精度が要求とされるときに、ストロークセンサの出力特性の線形性を高めて誤差の発生を最小限に抑えるとともに、ストロークセンサの出力ゲインを高めることができる。しかもストロークセンサの出力特性の線形性が高まることで、ストロークセンサの取り付け位置にバラツキがあっても、出力特性の変化を最小限に抑えてブレーキフィールを高めることができる。
【0016】
また請求項2の構成によれば、ストロークセンサの分解能を他の領域よりも高く設定する領域を、センサアームが、ブレーキペダルが操作されていないときの初点位置と、ブレーキペダルが所定量操作されたときの終点位置との間の中間位置に存在する領域としたので、ストロークセンサの理想的な出力特性に対する実際の出力特性の誤差を中間位置の両側に均等に振り分け、前記誤差の最大値を減少させて出力特性の線形性を高めることができる。
【0017】
また請求項3の構成によれば、ペダルアームとセンサアームとの間にリンク手段を介在させ、ストロークセンサの分解能を他の領域よりも高く設定する領域にあるときに、ペダル回動軸、センサ回動軸およびリンク手段を一つの直線上に位置させたので、ストロークセンサの理想的な出力特性に対する実際の出力特性の誤差を中間位置の両側に更に均等に振り分けることができ、前記誤差の最大値を一層減少させることができる。
【0018】
また請求項4の構成によれば、センサアームにリンク手段が摺動自在に係合するガイド溝を設け、ストロークセンサの分解能を他の領域よりも高く設定する領域にあるときに、ガイド溝が前記直線と平行になるので、ストロークセンサの理想的な出力特性に対する実際の出力特性の誤差を中間位置の両側に完全に均等に振り分けることができ、前記誤差の最大値をより一層減少させることができる。
【0019】
また請求項5の構成によれば、制動力発生手段は、ブレーキペダルの操作に応じてマスタシリンダがブレーキ液圧を発生すると、マスタシリンダに接続されたストロークシミュレータがブレーキペダルに擬似的な操作反力を付与するとともに、少なくともブレーキペダルの操作に応じた電気信号によりスレーブシリンダがブレーキ液圧を発生して車両を制動する。ストロークシミュレータは、ブレーキペダルの操作に基づいて操作反力を発生し、また終点位置はストロークシミュレータの最大ストローク位置に対応するので、制動力発生手段が正常に機能しているときに運転者が操作可能なブレーキペダルの操作範囲において、ストロークセンサの検出精度を高めることができる。
【0020】
また請求項6の構成によれば、ストロークシミュレータが最大ストローク位置に達するまでのブレーキペダルのストロークをストロークセンサにより検出し、ストロークシミュレータが最大ストローク位置に達した後のブレーキペダルのストロークをマスタシリンダで発生するブレーキ液圧を検出する液圧センサにより検出するので、高い検出精度が要求される領域をストロークセンサでカバーし、他の領域を液圧センサでカバーすることで、全領域をストロークセンサでカバーする場合に比べて、ストロークセンサの分解能を高めて検出精度を更に高めることができる。
【0021】
また請求項7の構成によれば、ペダルアームおよびセンサアームの連結を解除したとき、センサアームがペダル回動軸まわりに回動する領域を覆うカバーを設けたので、ストロークセンサをカバーで覆って磁気の影響を遮断しながら、カバーによってセンサアームの回動が阻害されるのを防止することができる。
【図面の簡単な説明】
【0022】
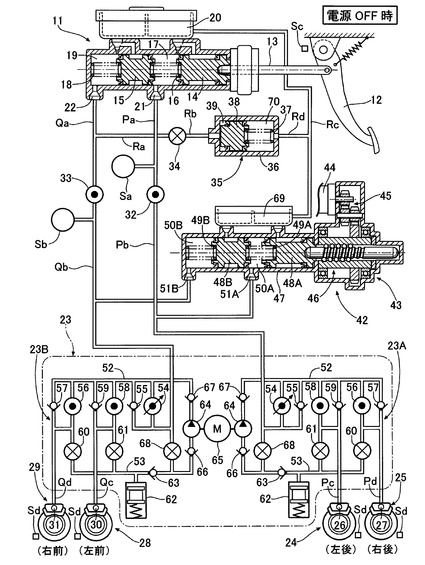
【図1】車両用ブレーキ装置の液圧回路図(電源OFF時)。[第1の実施の形態]
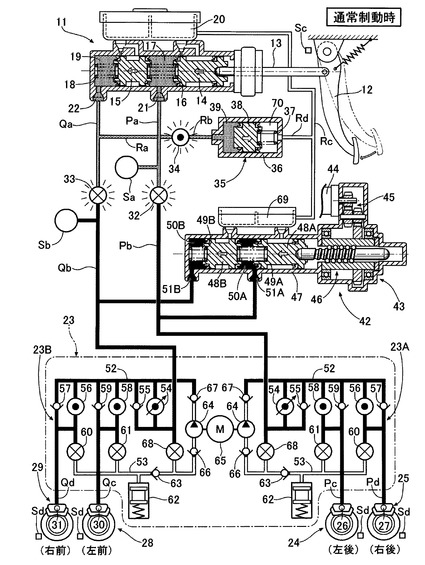
【図2】通常制動時の作用説明図。[第1の実施の形態]
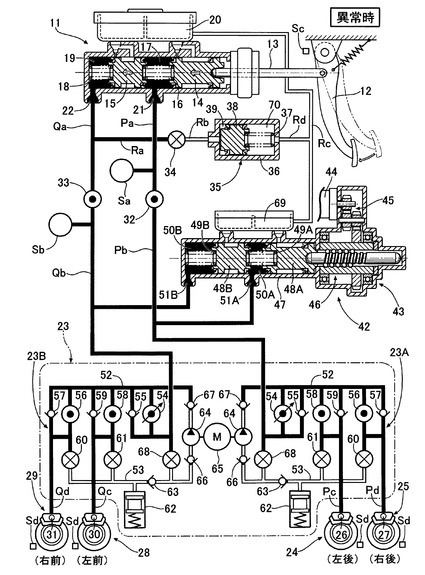
【図3】異常時(電源失陥時)の作用説明図。[第1の実施の形態]
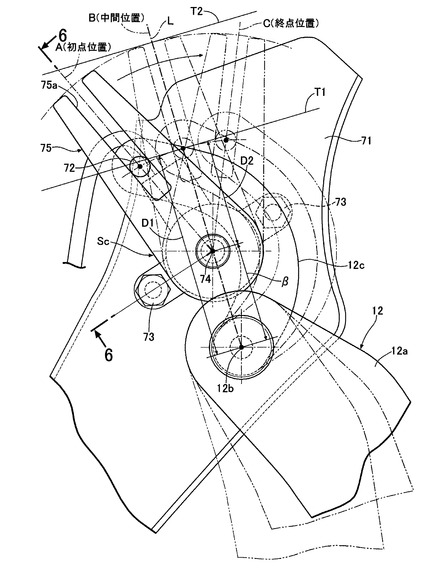
【図4】ブレーキペダルの拡大側面図。[第1の実施の形態]
【図5】図2の5部拡大図。[第1の実施の形態]
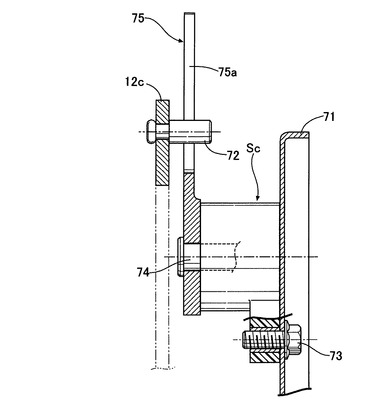
【図6】図5の6−6線断面図。[第1の実施の形態]
【図7】センサアームをペダルアームから分離したときの作用説明図。[第1の実施の形態]。
【図8】ブレーキペダルのペダルストロークとストロークセンサの出力電圧との関係を示すグラフ。[第1の実施の形態]
【図9】ブレーキペダルのペダルストロークとストロークセンサの出力電圧との関係を示すグラフ。[従来例]
【発明を実施するための形態】
【0023】
以下、図1〜図8に基づいて本発明の実施の形態を説明する。
【0024】
図1に示すように、タンデム型のマスタシリンダ11は、運転者が操作するブレーキペダル12にプッシュロッド13を介して接続された第1ピストン14と、その前方に配置された第2ピストン15とを備えており、第1ピストン14および第2ピストン15間にリターンスプリング16が収納された第1液圧室17が区画され、第2ピストン15の前方にリターンスプリング18が収納された第2液圧室19が区画される。リザーバ20に連通可能な第1液圧室17および第2液圧室19はそれぞれ第1出力ポート21および第2出力ポート22を備えており、第1出力ポート21は液路Pa,Pb、VSA(ビークル・スタビリティ・アシスト)装置23および液路Pc,Pdを介して、例えば左右の後輪のディスクブレーキ装置24,25のホイールシリンダ26,27(第1系統)に接続されるとともに、第2出力ポート22は液路Qa,Qb、VSA装置23および液路Qc,Qdを介して、例えば左右の前輪のディスクブレーキ装置28,29のホイールシリンダ30,31(第2系統)に接続される。
【0025】
尚、本明細書で、液路Pa〜Pdおよび液路Qa〜Qdの上流側とはマスタシリンダ11側を意味し、下流側とはホイールシリンダ26,27;30,31側を意味するものとする。
【0026】
液路Pa,Pb間に常開型電磁弁である第1マスタカットバルブ32が配置され、液路Qa,Qb間に常開型電磁弁である第2マスタカットバルブ33が配置される。第2マスタカットバルブ33の上流側の液路Qaから分岐する供給側液路Ra,Rbは、常閉型電磁弁であるシミュレータバルブ34を介してストロークシミュレータ35に接続される。ストロークシミュレータ35は、シリンダ36にスプリング37で付勢されたピストン38を摺動自在に嵌合させたもので、ピストン38の反スプリング37側に形成された液圧室39が供給側液路Rbに連通する。
【0027】
第1、第2マスタカットバルブ32,33の下流側の液路Pbおよび液路Qbにタンデム型のスレーブシリンダ42が接続される。スレーブシリンダ42を作動させるアクチュエータ43は、電動モータ44の回転をギヤ列45を介してボールねじ機構46に伝達する。スレーブシリンダ42のシリンダ本体47には、ボールねじ機構46により駆動される第1ピストン48Aと、その前方に位置する第2ピストン48Bとが摺動自在に嵌合しており、第1ピストン48Aおよび第2ピストン48B間にリターンスプリング49Aが収納された第1液圧室50Aが区画され、第2ピストン48Bの前方にリターンスプリング49Bが収納された第2液圧室50Bが区画される。アクチュエータ43のボールねじ機構46で第1、第2ピストン48A,48Bを前進方向に駆動すると、第1、第2液圧室50A,50Bに発生したブレーキ液圧が第1、第2出力ポート51A,51Bを介して液路Pb,Qbに伝達される。
【0028】
スレーブシリンダ42のリザーバ69とマスタシリンダ11のリザーバ20とが排出側液路Rcで接続されており、ストロークシミュレータ35のピストン38の背室70が排出側液路Rdを介して排出側液路Rcの中間部に接続される。
【0029】
VSA装置23の構造は周知のもので、左右の後輪のディスクブレーキ装置24,25の第1系統を制御する第1ブレーキアクチュエータ23Aと、左右の前輪のディスクブレーキ装置28,29の第2系統を制御する第2ブレーキアクチュエータ23Bとに同じ構造のものが設けられる。
【0030】
以下、その代表として左右の後輪のディスクブレーキ装置24,25の第1系統の第1ブレーキアクチュエータ23Aについて説明する。
【0031】
第1ブレーキアクチュエータ23Aは、上流側に位置する第1マスタカットバルブ32に連なる液路Pbと、下流側に位置する左右の後輪のホイールシリンダ26,27にそれぞれ連なる液路Pc,Pdとの間に配置される。
【0032】
第1ブレーキアクチュエータ23Aは左右の後輪のホイールシリンダ26,27に対して共通の液路52および液路53を備えており、液路Pbおよび液路52間に配置された可変開度の常開型電磁弁よりなるレギュレータバルブ54と、このレギュレータバルブ54に対して並列に配置されて液路Pb側から液路52側へのブレーキ液の流通を許容するチェックバルブ55と、液路52および液路Pd間に配置された常開型電磁弁よりなるインバルブ56と、このインバルブ56に対して並列に配置されて液路Pd側から液路52側へのブレーキ液の流通を許容するチェックバルブ57と、液路52および液路Pc間に配置された常開型電磁弁よりなるインバルブ58と、このインバルブ58に対して並列に配置されて液路Pc側から液路52側へのブレーキ液の流通を許容するチェックバルブ59と、液路Pdおよび液路53間に配置された常閉型電磁弁よりなるアウトバルブ60と、液路Pcおよび液路53間に配置された常閉型電磁弁よりなるアウトバルブ61と、液路53に接続されたリザーバ62と、液路53および液路Pb間に配置されて液路53側から液路Pb側へのブレーキ液の流通を許容するチェックバルブ63と、液路52および液路53間に配置されて液路53側から液路52側へブレーキ液を供給するポンプ64と、このポンプ64を駆動する電動モータ65と、ポンプ64の吸入側および吐出側に設けられてブレーキ液の逆流を阻止する一対のチェックバルブ66,67と、チェックバルブ63およびポンプ64の中間位置と液路Pbとの間に配置された常閉型電磁弁よりなるサクションバルブ68とを備える。
【0033】
尚、前記電動モータ65は、第1、第2ブレーキアクチュエータ23A,23Bのポンプ64,64に対して共用化されているが、各々のポンプ64,64に対して専用の電動モータ65,65を設けることも可能である。
【0034】
液路Paには、その液圧を検出する第1液圧センサSaが接続され、液路Qbには、その液圧を検出する第2液圧センサSbが接続される。ブレーキペダル12にはそのストロークをホール素子を用いて検出するストロークセンサScが設けられる。第1、第2マスタカットバルブ32,33、シミュレータバルブ34、スレーブシリンダ42およびVSA装置23に接続された図示せぬ電子制御ユニットには、前記第1液圧センサSaと、前記第2液圧センサSbと、前記ストロークセンサScと、各車輪の車輪速を検出する車輪速センサSd…とが接続される。
【0035】
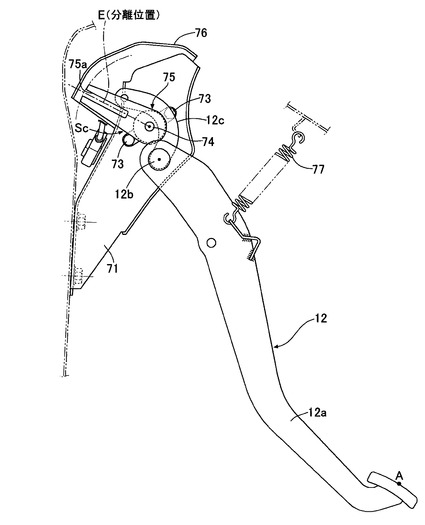
図4〜図6に示すように、ダッシュボードに固定されたブラケット71にブレーキペダル12が回動可能に枢支される。ブレーキペダル12は、運転者によって操作されるペダル部12aと、ペダル部12aの上端をブラケット71に枢支するペダル回動軸12bと、ペダル部12aの上端に固定された円弧状のペダルアーム12c、ペダルアーム12cの上端に固定されたピン72(本願発明のリンク手段)とを備える。ブラケット71に前記ペダル回動軸12bに隣接するようにボルト73,73で固定されたストロークセンサScは、ペダル回動軸12bと平行なセンサ回動軸74まわりに回動可能なセンサアーム75を備える。センサアーム75にセンサ回動軸74から径方向に延びるように直線状に形成されたガイド溝75aに、ペダルアーム12cに設けたピン72が摺動可能に係合する。またブラケット71には、ストロークセンサScのセンサアーム75の全ての回動範囲をカバーするようにカバー79が設けられる
運転者によりペダル部12aを操作されたブレーキペダル12がリターンスプリング77の弾発力に抗してペダル回動軸12bまわりに前方に回動すると、ペダルアーム12cがペダル回動軸12bまわりに後方に回動し、ペダルアーム12cに固定したピン72がガイド溝75aを押すことでセンサアーム75がセンサ回動軸74まわりに回動する。その結果、ストロークセンサScはセンサアーム75の回動位置に応じた電圧を出力し、その電圧に応じたブレーキペダル12のストロークが検出される。
【0036】
次に、上記構成を備えた本発明の実施の形態の作用について説明する。
【0037】
先ず、図2に基づいて正常時における通常の制動作用について説明する。
【0038】
システムが正常に機能する正常時に、ストロークセンサScが運転者によるブレーキペダル12の踏み込みを検出すると、常開型電磁弁よりなる第1、第2マスタカットバルブ32,33が励磁されて閉弁し、常閉型電磁弁よりなるシミュレータバルブ34が励磁されて開弁する。これと同時にスレーブシリンダ42のアクチュエータ43が作動して第1、第2ピストン48A,48Bが前進することで第1、第2液圧室50A,50Bにブレーキ液圧が発生し、そのブレーキ液圧は第1、第2出力ポート51A,51Bから液路Pbおよび液路Qbに伝達され、両液路Pb,QbからVSA装置23の開弁したインバルブ56,56;58,58を介してディスクブレーキ装置24,25;28,29のホイールシリンダ26,27;30,31に伝達されて各車輪を制動する。
【0039】
また常閉型電磁弁よりなるシミュレータバルブ34は励磁されて開弁状態にあるため、マスタシリンダ11の第2液圧室19が発生したブレーキ液圧は開弁したシミュレータバルブ34を介してストロークシミュレータ35の液圧室39に伝達され、そのピストン38をスプリング37に抗して移動させることで、ブレーキペダル12のストロークを許容するとともに擬似的な操作反力を発生させて運転者の違和感を解消することができる。
【0040】
そして液路Qbに設けた第2液圧センサSbで検出したスレーブシリンダ42によるブレーキ液圧が、ストロークセンサScで検出したブレーキペダル12のストロークに応じた大きさになるように、スレーブシリンダ42のアクチュエータ43の作動を制御することで、運転者がブレーキペダル12に入力する操作量に応じた制動力をディスクブレーキ装置24,25;28,29に発生させることができる。
【0041】
次に、VSA装置23の作用を説明する。
【0042】
VSA装置23が作動していない状態では、レギュレータバルブ54,54が消磁されて開弁し、サクションバルブ68,68が消磁されて閉弁し、インバルブ56,56;58,58が消磁されて開弁し、アウトバルブ60,60;61,61が消磁されて閉弁する。従って、運転者が制動を行うべくブレーキペダル12を踏んでスレーブシリンダ42が作動すると、スレーブシリンダ42の第1、第2出力ポート51A,51Bから出力されたブレーキ液圧は、レギュレータバルブ54,54から開弁状態にあるインバルブ56,56;58,58を経てホイールシリンダ26,27;30,31に供給され、四輪を制動することができる。
【0043】
VSA装置23の作動時には、サクションバルブ68,68が励磁されて開弁した状態で電動モータ65でポンプ64,64が駆動され、スレーブシリンダ42側からサクションバルブ68,68を経て吸入されてポンプ64,64で加圧されたブレーキ液が、レギュレータバルブ54,54およびインバルブ56,56;58,58に供給される。従って、レギュレータバルブ54,54を励磁して開度を調整することで液路52,52のブレーキ液圧を調圧するとともに、そのブレーキ液圧を開弁したインバルブ56,56;58,58を介してホイールシリンダ26,27;30,31に選択的に供給することで、運転者がブレーキペダル12を踏んでいない状態でも、四輪の制動力を個別に制御することができる。
【0044】
従って、第1、第2ブレーキアクチュエータ23A,23Bにより四輪の制動力を個別に制御し、旋回内輪の制動力を増加させて旋回性能を高めたり、旋回外輪の制動力を増加させて直進安定性能を高めたりすることができる。
【0045】
また運転者がブレーキペダル12を踏んでの制動中に、例えば左後輪が低摩擦係数路を踏んでロック傾向になったことを車輪速センサSd…の出力に基づいて検出した場合には、第1ブレーキアクチュエータ23Aの一方のインバルブ58を励磁して閉弁するとともに、一方のアウトバルブ61を励磁して開弁することで、左後輪のホイールシリンダ26のブレーキ液圧をリザーバ62に逃がして所定の圧力まで減圧した後、アウトバルブ61を消磁して閉弁することで、左後輪のホイールシリンダ26のブレーキ液圧を保持する。その結果、左後輪のホイールシリンダ26のロック傾向が解消に向かうと、インバルブ58を消磁して開弁することで、スレーブシリンダ42の第1出力ポート51Aからのブレーキ液圧を左後輪のホイールシリンダ26に供給して所定の圧力まで増圧することで、制動力を増加させる。
【0046】
この増圧によって左後輪が再びロック傾向になった場合には、前記減圧→保持→増圧を繰り返すことにより、左後輪のロックを抑制しながら制動距離を最小限に抑えるABS(アンチロック・ブレーキ・システム)制御を行うことができる。
【0047】
以上、左後輪のホイールシリンダ26がロック傾向になったときのABS制御について説明したが、右後輪のホイールシリンダ27、左前輪のホイールシリンダ30、右前輪のホイールシリンダ31がロック傾向になったときのABS制御も同様にして行うことができる。
【0048】
次に、図3に基づいて電源の失陥等によりスレーブシリンダ42が作動不能になった場合の作用について説明する。
【0049】
電源が失陥すると、常開型電磁弁よりなる第1、第2マスタカットバルブ32,33は自動的に開弁し、常閉型電磁弁よりなるシミュレータバルブ34は自動的に閉弁し、常開型電磁弁よりなるインバルブ56,56;58,58およびレギュレータバルブ54,54は自動的に開弁し、常閉型電磁弁よりなるアウトバルブ60,60;61,61およびサクションバルブ68,68は自動的に閉弁する。この状態では、マスタシリンダ11の第1、第2液圧室17,19に発生したブレーキ液圧は、ストロークシミュレータ35に吸収されることなく第1、第2マスタカットバルブ32,33、レギュレータバルブ54,54およびインバルブ56,56;58,58を通過して各車輪のディスクブレーキ装置24,25;30,31のホイールシリンダ26,27;30,31を作動させ、支障なく制動力を発生させることができる。
【0050】
このとき、マスタシリンダ11が発生するブレーキ液圧がスレーブシリンダ42の第1、第2液圧室50A,50Bに作用して第1、第2ピストン48A,48Bを後退させてしまうと、第1、第2液圧室50A,50Bの容積が拡大して前記ブレーキ液圧が減圧してしまい、ブレーキ液圧を維持しようとするとブレーキペダル12のストロークが増加してしまう可能性がある。しかしながら、スレーブシリンダ42のボールねじ機構46は、第1ピストン48A側から荷重が入力した場合には後退を抑制されるため、第1、第2液圧室50A,50Bの容積増加が軽減される。尚、スレーブシリンダ42の失陥時に第1、第2ピストン48A,48Bの後退を規制する部材を別途設けても良い。この場合は通常動作時に駆動抵抗を増加させない構造であることが望ましい。
【0051】
図4および図5に示すように、運転者が操作をしていないときにブレーキペダル12およびセンサアーム75は初点位置Aにあり、そこからブレーキペダル12およびセンサアーム75は中間位置Bおよび終点位置Cを経てフルストローク位置Dへと移動する。初点位置Aから終点位置Cまでの領域では、ブレーキペダル12のストロークがストロークセンサScにより検出され、終点位置Cからフルストローク位置Dまでの領域では、ブレーキペダル12のストロークがス第1液圧センサSaにより検出される。即ち、ブレーキペダル12のストロークに応じてマスタシリンダ11がブレーキ液圧を発生すると、そのブレーキ液圧が第1液圧センサSaにより検出されるが、そのブレーキ液圧はブレーキペダル12のストロークに対して相関関係にあるため、ブレーキ液圧からブレーキペダル12のストロークを検出することができる。尚、終点位置Cは、ストロークシミュレータ35のピストン38が最大限にストロークした状態に対応する。
【0052】
初点位置Aからフルストローク位置Dまでの全ての領域をストロークセンサScで検出しない理由は、そのようにすると、ストロークセンサScの分解能が低くなって検出精度が低下するためである。またブレーキペダル12の低ストローク領域をストロークセンサScで検出する理由は、低ストローク領域は高ストローク領域に比べて高い検出精度が要求されるので、第1液圧センサSaよりも検出精度が高いストロークセンサScで低ストローク領域をカバーするためである。
【0053】
さて、ブレーキペダル12を初点位置Aから終点位置Cに向けて踏み込むと、図5においてペダル部12aがペダル回動軸12bまわりに時計方向に回動し、ペダル部12aと一体のペダルアーム12cがペダル回動軸12bまわりに時計方向に回動する。その結果、ペダルアーム12cに設けたピン72にガイド溝75aを押圧されたセンサアーム75がセンサ回動軸74まわりに時計方向に回動し、ストロークセンサScがブレーキペダル12のストロークに応じた電圧を出力する。
【0054】
センサアーム75の中間位置Bは、初点位置Aおよび終点位置Cの中間に位置している。即ち、センサアーム75の初点位置Aから中間位置Bまでの回動角と、センサアーム75の中間位置Bから終点位置Cまでの回動角とは一致している。そしてセンサアーム75が中間位置Bにあるとき、ペダル回動軸12b、センサ回動軸74およびピン72は同一直線L上に位置している。言い換えると、センサアーム75が中間位置Bにあるとき、ペダルアーム12cの回動軌跡(つまりピン72の回動軌跡)の接線T1とセンサアーム75の回動軌跡の接線T2とが平行になる。
【0055】
ペダル回動軸12bとセンサ回動軸74とは距離βだけずれているため、ペダルアーム12cの回動角の変化量とセンサアーム75の回動角の変化量との比率は、ペダル回動軸12bおよびピン72の距離D1と、センサ回動軸74およびピン72の距離D2との比に応じた値となる。しかしながら、前記回動角の変化量の比率は一定値ではなく、ブレーキペダル12のストロークに応じて変化してしまい、これがブレーキペダル12のストロークとストロークセンサScの出力との間の線形性を損ねる原因となる。
【0056】
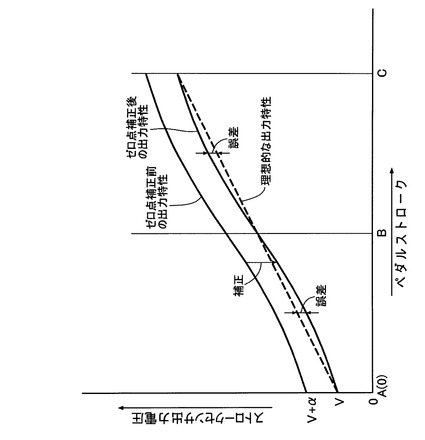
しかしながら本実施の形態によれば、センサアーム75が中間位置Bにあるとき、ペダルアーム12cの回動軌跡の接線T1とセンサアーム75の回動軌跡の接線T2とが平行になるようにペダルアーム12cおよびセンサアーム75を配置したので、ストロークセンサScの理想的な出力特性に対する実際の出力特性の誤差を中間位置Bの両側(つまり初点位置A側および終点位置C側)に均等に振り分け、前記誤差の最大値を減少させて出力特性の線形性を高めるとともに、ストロークセンサScの出力ゲインを高めることができる。特に、中間位置Bにおいてペダル回動軸12B、センサ回動軸74およびピン72を一つの直線L上に位置させるとともに、センサアーム75のガイド溝75aを前記直線L上に位置させたので、ストロークセンサScの理想的な出力特性に対する実際の出力特性の誤差を中間位置の両側に完全に均等に振り分けることができ、前記誤差の最大値を一層減少させることができる。
【0057】
これを図8に基づいて更に説明すると、ブレーキペダル12のペダルストロークが初点位置Aから終点位置Cへと増加すると、ストロークセンサScの出力電圧は正弦波状に増加するが、中間位置Bにおいて出力電圧が理想的な(リニアな)出力電圧の特性に交差する、従って、理想的な出力電圧の特性に対する誤差は、中間位置Bを挟んで初点位置A側と終点位置C側に均等に振り分けられ、誤差の最大値を最小限に抑えることができる。これに対し、図9に示す従来例では、理想的な出力電圧の特性に対する誤差が中間位置Bの前後に均等に振り分けられていないため、誤差の最大値が大きくなっている。
【0058】
ところで、ホール素子を用いたストロークセンサScは、原理的に外部磁力の影響を受ける虞があるため、それをカバー76で覆うことで磁力を遮蔽する効果が期待できる。センサアーム75とペダルアーム12cとを結合するピン72が外れてしまった場合に、センサアーム75が分離位置Eへと回動したときでも、そのセンサアーム75と干渉しないようにカバー76が設けられているため、カバー76との干渉によってセンサアーム75の分離位置Eへの回動が阻害されることはない。
【0059】
またシステムの正常時には、ブレーキペダル12は初点位置Aから終点位置Cまでの範囲でストロークできるようにシミュレータバルブ34が制御されるため、システムの正常時にブレーキペダル12を操作可能な領域でストロークセンサScの検出精度を高めることができる。
【0060】
以上、本発明の実施の形態を説明したが、本発明はその要旨を逸脱しない範囲で種々の設計変更を行うことが可能である。
【0061】
例えば、実施の形態ではセンサアーム75が、ブレーキペダル12が操作されていないときの初点位置Aと、ブレーキペダル12が所定量操作されたときの終点位置Cとの間の中間位置Bに存在するときに、ペダルアーム12cの回動軌跡の接線T1とセンサアーム75の回動軌跡の接線T2とが平行になるように設定しているが、ストロークセンサScの分解能を他の領域よりも高く設定する必要がある領域において、上記のように設定することができる。
【0062】
また実施の形態ではペダルアーム12cをペダル部12aと別部材で構成して一体に結合しているが、それらを一部材で構成しても良い。
【0063】
またペダルアーム12cおよびセンサアーム75の回動方向は実施の形態に限定されるものではなく、ブレーキペダル12の操作に応じて時計方向あるいは反時計方向に回動するものであれば良い。
【符号の説明】
【0064】
11 マスタシリンダ
12 ブレーキペダル
12a ペダル部
12b ペダル回動軸
12c ペダルアーム
35 トロークシミュレータ
42 スレーブシリンダ
72 ピン(リンク手段)
74 センサ回動軸
75 センサアーム
75a ガイド溝
76 カバー
L 直線
Sa 第1液圧センサ(液圧センサ)
Sc ストロークセンサ
T1 ペダルアームの回動軌跡の接線
T2 センサアームの回動軌跡の接線
【技術分野】
【0001】
本発明は、ブレーキペダルと、前記ブレーキペダルのストロークを検出するストロークセンサと、前記ストロークセンサの検出値に基づいて制動力を発生する制動力発生手段とを備える車両用ブレーキ装置に関する。
【背景技術】
【0002】
ブレーキペダルのストロークを、ブレーキペダルの回動に連動して回動するストロークセンサを用いて検出するものにおいて、ブレーキペダルが操作されていないときのストロークセンサの出力電圧が基準電圧に一致しない場合に、前記出力電圧が基準電圧に一致するようにゼロ点補正を行うものが、下記特許文献1により公知である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−322689号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
図9のグラフは従来のゼロ点補正の手法を示すもので、横軸はブレーキペダルのストローク、縦軸はストロークセンサの出力電圧である。ペダルストロークがゼロから増加するとストロークセンサの出力電圧も増加するが、ペダルストロークがゼロのときの出力電圧は予め決められた所定値Vに一致している必要がある。しかしながら、ブレーキペダルが操作されていない初点位置Aのずれや、ブレーキペダルとストロークセンサとの連結部分の寸法誤差等により、ペダルストロークがゼロのときの出力電圧は所定値Vに一致せず、V±αの電圧が出力される場合がある。ブレーキペダルが初点位置Aにあるとき、ストロークセンサの出力電圧は本来はVでなくてはならないが、それがV±αになると、例えば、ペダルストロークがゼロでなくてもゼロであると誤認識されてしまう等の問題がある。そこで、ペダルストロークがゼロのときの出力電圧がV±αである場合には、その出力電圧V±αからαを減算あるいは加算する補正(ゼロ点補正)を行うことで、上記問題を解消することができる。
【0005】
ところで、ブレーキペダルのペダルストロークが増加すると、それに応じてストロークセンサの出力電圧がリニアに増加することが望ましいが(図9の破線の出力特性参照)、ブレーキペダルのペダル回動軸とストロークセンサのセンサ回動軸とが異なる位置に配置されていると、ブレーキペダルのペダルストロークとストロークセンサの出力電圧との関係がリニアにならず、ストロークセンサの出力電圧に誤差が発生する問題があり、この誤差は前記ゼロ点補正では解消することが不能である。
【0006】
本発明は前述の事情に鑑みてなされたもので、ブレーキペダルのストロークと、ストロークセンサの出力との線形性およびゲインを高めることを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、請求項1に記載された発明によれば、ブレーキペダルと、前記ブレーキペダルのストロークを検出するストロークセンサと、前記ストロークセンサの検出値に基づいて制動力を発生する制動力発生手段とを備え、前記ブレーキペダルは、運転者により操作されるペダル部と、前記ペダル部を車体に回動可能に支持するペダル回動軸と、前記ペダル部の回動に応じて前記ペダル回動軸まわりに回動するペダルアームとを備え、前記ストロークセンサは、前記ペダル回動軸とは軸心を異にして平行に配置されるセンサ回動軸と、前記ペダルアームの回動により前記センサ回動軸まわりに回動するセンサアームとを備える車両用ブレーキ装置において、前記ブレーキペダルのストロークの中で、前記ストロークセンサの分解能を他の領域よりも高く設定する領域で、前記ペダルアームの回動軌跡の接線と前記センサアームの回動軌跡の接線とが平行になるように、前記ペダルアームおよび前記センサアームを配置したことを特徴とする車両用ブレーキ装置が提案される。
【0008】
また請求項2に記載された発明によれば、請求項1の構成に加えて、前記ストロークセンサの分解能を他の領域よりも高く設定する領域は、前記センサアームが、前記ブレーキペダルが操作されていないときの初点位置と、前記ブレーキペダルが所定量操作されたときの終点位置との間の中間位置に存在する領域であることを特徴とするブレーキ装置が提案される。
【0009】
また請求項3に記載された発明によれば、請求項1または請求項2の構成に加えて、前記ペダルアームと前記センサアームとの間に介在するリンク手段を備え、前記ストロークセンサの分解能を他の領域よりも高く設定する領域にあるときに、前記ペダル回動軸、前記センサ回動軸および前記リンク手段が一つの直線上に位置することを特徴とする車両用ブレーキ装置が提案される。
【0010】
また請求項4に記載された発明によれば、請求項1〜請求項3の何れか1項の構成に加えて、前記センサアームは、前記リンク手段が摺動自在に係合するガイド溝を備え、前記ストロークセンサの分解能を他の領域よりも高く設定する領域にあるときに、前記ガイド溝は前記直線と平行になるように配置されることを特徴とする車両用ブレーキ装置が提案される。
【0011】
また請求項5に記載された発明によれば、請求項2の構成に加えて、前記制動力発生手段は、前記ブレーキペダルの操作に応じてブレーキ液圧を発生するマスタシリンダと、前記マスタシリンダに接続されて前記ブレーキペダルに擬似的な操作反力を付与するストロークシミュレータと、少なくとも前記ブレーキペダルの操作に応じた電気信号によりブレーキ液圧を発生するスレーブシリンダとを備え、前記ストロークシミュレータは、前記ブレーキペダルの操作に基づいて操作反力を発生するとともに、前記終点位置は前記ストロークシミュレータの最大ストローク位置に対応することを特徴とする車両用ブレーキ装置が提案される。
【0012】
また請求項6に記載された発明によれば、請求項5の構成に加えて、前記マスタシリンダが発生するブレーキ液圧を検出する液圧センサを備え、前記ストロークシミュレータが最大ストローク位置に達するまでの前記ブレーキペダルのストロークを前記ストロークセンサにより検出し、前記ストロークシミュレータが最大ストローク位置に達した後の前記ブレーキペダルのストロークを前記液圧センサにより検出することを特徴とする車両用ブレーキ装置が提案される。
【0013】
また請求項7に記載された発明によれば、請求項1〜請求項6の何れか1項の構成に加えて、前記ペダルアームおよび前記センサアームの連結が解除されたときに、前記センサアームが前記ペダル回動軸まわりに回動する領域を覆うカバーを設けたことを特徴とする車両用ブレーキ装置が提案される。
【0014】
尚、実施の形態のピン72は本発明のリンク手段に対応し、実施の形態の第1液圧センサSaは本発明の液圧センサに対応する。
【発明の効果】
【0015】
請求項1の構成によれば、ブレーキペダルのストロークを検出するストロークセンサが、ブレーキペダルのペダル部およびペダルアームを回動可能に支持するペダル回動軸とは軸心を異にして平行に配置されるセンサ回動軸と、ペダルアームの回動によりセンサ回動軸まわりに回動するセンサアームとを備えており、ストロークセンサの分解能を他の領域よりも高く設定する領域にあるときに、ペダルアームの回動軌跡の接線とセンサアームの回動軌跡の接線とが平行になるようにペダルアームおよびセンサアームを配置したので、ストロークセンサに高い検出精度が要求とされるときに、ストロークセンサの出力特性の線形性を高めて誤差の発生を最小限に抑えるとともに、ストロークセンサの出力ゲインを高めることができる。しかもストロークセンサの出力特性の線形性が高まることで、ストロークセンサの取り付け位置にバラツキがあっても、出力特性の変化を最小限に抑えてブレーキフィールを高めることができる。
【0016】
また請求項2の構成によれば、ストロークセンサの分解能を他の領域よりも高く設定する領域を、センサアームが、ブレーキペダルが操作されていないときの初点位置と、ブレーキペダルが所定量操作されたときの終点位置との間の中間位置に存在する領域としたので、ストロークセンサの理想的な出力特性に対する実際の出力特性の誤差を中間位置の両側に均等に振り分け、前記誤差の最大値を減少させて出力特性の線形性を高めることができる。
【0017】
また請求項3の構成によれば、ペダルアームとセンサアームとの間にリンク手段を介在させ、ストロークセンサの分解能を他の領域よりも高く設定する領域にあるときに、ペダル回動軸、センサ回動軸およびリンク手段を一つの直線上に位置させたので、ストロークセンサの理想的な出力特性に対する実際の出力特性の誤差を中間位置の両側に更に均等に振り分けることができ、前記誤差の最大値を一層減少させることができる。
【0018】
また請求項4の構成によれば、センサアームにリンク手段が摺動自在に係合するガイド溝を設け、ストロークセンサの分解能を他の領域よりも高く設定する領域にあるときに、ガイド溝が前記直線と平行になるので、ストロークセンサの理想的な出力特性に対する実際の出力特性の誤差を中間位置の両側に完全に均等に振り分けることができ、前記誤差の最大値をより一層減少させることができる。
【0019】
また請求項5の構成によれば、制動力発生手段は、ブレーキペダルの操作に応じてマスタシリンダがブレーキ液圧を発生すると、マスタシリンダに接続されたストロークシミュレータがブレーキペダルに擬似的な操作反力を付与するとともに、少なくともブレーキペダルの操作に応じた電気信号によりスレーブシリンダがブレーキ液圧を発生して車両を制動する。ストロークシミュレータは、ブレーキペダルの操作に基づいて操作反力を発生し、また終点位置はストロークシミュレータの最大ストローク位置に対応するので、制動力発生手段が正常に機能しているときに運転者が操作可能なブレーキペダルの操作範囲において、ストロークセンサの検出精度を高めることができる。
【0020】
また請求項6の構成によれば、ストロークシミュレータが最大ストローク位置に達するまでのブレーキペダルのストロークをストロークセンサにより検出し、ストロークシミュレータが最大ストローク位置に達した後のブレーキペダルのストロークをマスタシリンダで発生するブレーキ液圧を検出する液圧センサにより検出するので、高い検出精度が要求される領域をストロークセンサでカバーし、他の領域を液圧センサでカバーすることで、全領域をストロークセンサでカバーする場合に比べて、ストロークセンサの分解能を高めて検出精度を更に高めることができる。
【0021】
また請求項7の構成によれば、ペダルアームおよびセンサアームの連結を解除したとき、センサアームがペダル回動軸まわりに回動する領域を覆うカバーを設けたので、ストロークセンサをカバーで覆って磁気の影響を遮断しながら、カバーによってセンサアームの回動が阻害されるのを防止することができる。
【図面の簡単な説明】
【0022】
【図1】車両用ブレーキ装置の液圧回路図(電源OFF時)。[第1の実施の形態]
【図2】通常制動時の作用説明図。[第1の実施の形態]
【図3】異常時(電源失陥時)の作用説明図。[第1の実施の形態]
【図4】ブレーキペダルの拡大側面図。[第1の実施の形態]
【図5】図2の5部拡大図。[第1の実施の形態]
【図6】図5の6−6線断面図。[第1の実施の形態]
【図7】センサアームをペダルアームから分離したときの作用説明図。[第1の実施の形態]。
【図8】ブレーキペダルのペダルストロークとストロークセンサの出力電圧との関係を示すグラフ。[第1の実施の形態]
【図9】ブレーキペダルのペダルストロークとストロークセンサの出力電圧との関係を示すグラフ。[従来例]
【発明を実施するための形態】
【0023】
以下、図1〜図8に基づいて本発明の実施の形態を説明する。
【0024】
図1に示すように、タンデム型のマスタシリンダ11は、運転者が操作するブレーキペダル12にプッシュロッド13を介して接続された第1ピストン14と、その前方に配置された第2ピストン15とを備えており、第1ピストン14および第2ピストン15間にリターンスプリング16が収納された第1液圧室17が区画され、第2ピストン15の前方にリターンスプリング18が収納された第2液圧室19が区画される。リザーバ20に連通可能な第1液圧室17および第2液圧室19はそれぞれ第1出力ポート21および第2出力ポート22を備えており、第1出力ポート21は液路Pa,Pb、VSA(ビークル・スタビリティ・アシスト)装置23および液路Pc,Pdを介して、例えば左右の後輪のディスクブレーキ装置24,25のホイールシリンダ26,27(第1系統)に接続されるとともに、第2出力ポート22は液路Qa,Qb、VSA装置23および液路Qc,Qdを介して、例えば左右の前輪のディスクブレーキ装置28,29のホイールシリンダ30,31(第2系統)に接続される。
【0025】
尚、本明細書で、液路Pa〜Pdおよび液路Qa〜Qdの上流側とはマスタシリンダ11側を意味し、下流側とはホイールシリンダ26,27;30,31側を意味するものとする。
【0026】
液路Pa,Pb間に常開型電磁弁である第1マスタカットバルブ32が配置され、液路Qa,Qb間に常開型電磁弁である第2マスタカットバルブ33が配置される。第2マスタカットバルブ33の上流側の液路Qaから分岐する供給側液路Ra,Rbは、常閉型電磁弁であるシミュレータバルブ34を介してストロークシミュレータ35に接続される。ストロークシミュレータ35は、シリンダ36にスプリング37で付勢されたピストン38を摺動自在に嵌合させたもので、ピストン38の反スプリング37側に形成された液圧室39が供給側液路Rbに連通する。
【0027】
第1、第2マスタカットバルブ32,33の下流側の液路Pbおよび液路Qbにタンデム型のスレーブシリンダ42が接続される。スレーブシリンダ42を作動させるアクチュエータ43は、電動モータ44の回転をギヤ列45を介してボールねじ機構46に伝達する。スレーブシリンダ42のシリンダ本体47には、ボールねじ機構46により駆動される第1ピストン48Aと、その前方に位置する第2ピストン48Bとが摺動自在に嵌合しており、第1ピストン48Aおよび第2ピストン48B間にリターンスプリング49Aが収納された第1液圧室50Aが区画され、第2ピストン48Bの前方にリターンスプリング49Bが収納された第2液圧室50Bが区画される。アクチュエータ43のボールねじ機構46で第1、第2ピストン48A,48Bを前進方向に駆動すると、第1、第2液圧室50A,50Bに発生したブレーキ液圧が第1、第2出力ポート51A,51Bを介して液路Pb,Qbに伝達される。
【0028】
スレーブシリンダ42のリザーバ69とマスタシリンダ11のリザーバ20とが排出側液路Rcで接続されており、ストロークシミュレータ35のピストン38の背室70が排出側液路Rdを介して排出側液路Rcの中間部に接続される。
【0029】
VSA装置23の構造は周知のもので、左右の後輪のディスクブレーキ装置24,25の第1系統を制御する第1ブレーキアクチュエータ23Aと、左右の前輪のディスクブレーキ装置28,29の第2系統を制御する第2ブレーキアクチュエータ23Bとに同じ構造のものが設けられる。
【0030】
以下、その代表として左右の後輪のディスクブレーキ装置24,25の第1系統の第1ブレーキアクチュエータ23Aについて説明する。
【0031】
第1ブレーキアクチュエータ23Aは、上流側に位置する第1マスタカットバルブ32に連なる液路Pbと、下流側に位置する左右の後輪のホイールシリンダ26,27にそれぞれ連なる液路Pc,Pdとの間に配置される。
【0032】
第1ブレーキアクチュエータ23Aは左右の後輪のホイールシリンダ26,27に対して共通の液路52および液路53を備えており、液路Pbおよび液路52間に配置された可変開度の常開型電磁弁よりなるレギュレータバルブ54と、このレギュレータバルブ54に対して並列に配置されて液路Pb側から液路52側へのブレーキ液の流通を許容するチェックバルブ55と、液路52および液路Pd間に配置された常開型電磁弁よりなるインバルブ56と、このインバルブ56に対して並列に配置されて液路Pd側から液路52側へのブレーキ液の流通を許容するチェックバルブ57と、液路52および液路Pc間に配置された常開型電磁弁よりなるインバルブ58と、このインバルブ58に対して並列に配置されて液路Pc側から液路52側へのブレーキ液の流通を許容するチェックバルブ59と、液路Pdおよび液路53間に配置された常閉型電磁弁よりなるアウトバルブ60と、液路Pcおよび液路53間に配置された常閉型電磁弁よりなるアウトバルブ61と、液路53に接続されたリザーバ62と、液路53および液路Pb間に配置されて液路53側から液路Pb側へのブレーキ液の流通を許容するチェックバルブ63と、液路52および液路53間に配置されて液路53側から液路52側へブレーキ液を供給するポンプ64と、このポンプ64を駆動する電動モータ65と、ポンプ64の吸入側および吐出側に設けられてブレーキ液の逆流を阻止する一対のチェックバルブ66,67と、チェックバルブ63およびポンプ64の中間位置と液路Pbとの間に配置された常閉型電磁弁よりなるサクションバルブ68とを備える。
【0033】
尚、前記電動モータ65は、第1、第2ブレーキアクチュエータ23A,23Bのポンプ64,64に対して共用化されているが、各々のポンプ64,64に対して専用の電動モータ65,65を設けることも可能である。
【0034】
液路Paには、その液圧を検出する第1液圧センサSaが接続され、液路Qbには、その液圧を検出する第2液圧センサSbが接続される。ブレーキペダル12にはそのストロークをホール素子を用いて検出するストロークセンサScが設けられる。第1、第2マスタカットバルブ32,33、シミュレータバルブ34、スレーブシリンダ42およびVSA装置23に接続された図示せぬ電子制御ユニットには、前記第1液圧センサSaと、前記第2液圧センサSbと、前記ストロークセンサScと、各車輪の車輪速を検出する車輪速センサSd…とが接続される。
【0035】
図4〜図6に示すように、ダッシュボードに固定されたブラケット71にブレーキペダル12が回動可能に枢支される。ブレーキペダル12は、運転者によって操作されるペダル部12aと、ペダル部12aの上端をブラケット71に枢支するペダル回動軸12bと、ペダル部12aの上端に固定された円弧状のペダルアーム12c、ペダルアーム12cの上端に固定されたピン72(本願発明のリンク手段)とを備える。ブラケット71に前記ペダル回動軸12bに隣接するようにボルト73,73で固定されたストロークセンサScは、ペダル回動軸12bと平行なセンサ回動軸74まわりに回動可能なセンサアーム75を備える。センサアーム75にセンサ回動軸74から径方向に延びるように直線状に形成されたガイド溝75aに、ペダルアーム12cに設けたピン72が摺動可能に係合する。またブラケット71には、ストロークセンサScのセンサアーム75の全ての回動範囲をカバーするようにカバー79が設けられる
運転者によりペダル部12aを操作されたブレーキペダル12がリターンスプリング77の弾発力に抗してペダル回動軸12bまわりに前方に回動すると、ペダルアーム12cがペダル回動軸12bまわりに後方に回動し、ペダルアーム12cに固定したピン72がガイド溝75aを押すことでセンサアーム75がセンサ回動軸74まわりに回動する。その結果、ストロークセンサScはセンサアーム75の回動位置に応じた電圧を出力し、その電圧に応じたブレーキペダル12のストロークが検出される。
【0036】
次に、上記構成を備えた本発明の実施の形態の作用について説明する。
【0037】
先ず、図2に基づいて正常時における通常の制動作用について説明する。
【0038】
システムが正常に機能する正常時に、ストロークセンサScが運転者によるブレーキペダル12の踏み込みを検出すると、常開型電磁弁よりなる第1、第2マスタカットバルブ32,33が励磁されて閉弁し、常閉型電磁弁よりなるシミュレータバルブ34が励磁されて開弁する。これと同時にスレーブシリンダ42のアクチュエータ43が作動して第1、第2ピストン48A,48Bが前進することで第1、第2液圧室50A,50Bにブレーキ液圧が発生し、そのブレーキ液圧は第1、第2出力ポート51A,51Bから液路Pbおよび液路Qbに伝達され、両液路Pb,QbからVSA装置23の開弁したインバルブ56,56;58,58を介してディスクブレーキ装置24,25;28,29のホイールシリンダ26,27;30,31に伝達されて各車輪を制動する。
【0039】
また常閉型電磁弁よりなるシミュレータバルブ34は励磁されて開弁状態にあるため、マスタシリンダ11の第2液圧室19が発生したブレーキ液圧は開弁したシミュレータバルブ34を介してストロークシミュレータ35の液圧室39に伝達され、そのピストン38をスプリング37に抗して移動させることで、ブレーキペダル12のストロークを許容するとともに擬似的な操作反力を発生させて運転者の違和感を解消することができる。
【0040】
そして液路Qbに設けた第2液圧センサSbで検出したスレーブシリンダ42によるブレーキ液圧が、ストロークセンサScで検出したブレーキペダル12のストロークに応じた大きさになるように、スレーブシリンダ42のアクチュエータ43の作動を制御することで、運転者がブレーキペダル12に入力する操作量に応じた制動力をディスクブレーキ装置24,25;28,29に発生させることができる。
【0041】
次に、VSA装置23の作用を説明する。
【0042】
VSA装置23が作動していない状態では、レギュレータバルブ54,54が消磁されて開弁し、サクションバルブ68,68が消磁されて閉弁し、インバルブ56,56;58,58が消磁されて開弁し、アウトバルブ60,60;61,61が消磁されて閉弁する。従って、運転者が制動を行うべくブレーキペダル12を踏んでスレーブシリンダ42が作動すると、スレーブシリンダ42の第1、第2出力ポート51A,51Bから出力されたブレーキ液圧は、レギュレータバルブ54,54から開弁状態にあるインバルブ56,56;58,58を経てホイールシリンダ26,27;30,31に供給され、四輪を制動することができる。
【0043】
VSA装置23の作動時には、サクションバルブ68,68が励磁されて開弁した状態で電動モータ65でポンプ64,64が駆動され、スレーブシリンダ42側からサクションバルブ68,68を経て吸入されてポンプ64,64で加圧されたブレーキ液が、レギュレータバルブ54,54およびインバルブ56,56;58,58に供給される。従って、レギュレータバルブ54,54を励磁して開度を調整することで液路52,52のブレーキ液圧を調圧するとともに、そのブレーキ液圧を開弁したインバルブ56,56;58,58を介してホイールシリンダ26,27;30,31に選択的に供給することで、運転者がブレーキペダル12を踏んでいない状態でも、四輪の制動力を個別に制御することができる。
【0044】
従って、第1、第2ブレーキアクチュエータ23A,23Bにより四輪の制動力を個別に制御し、旋回内輪の制動力を増加させて旋回性能を高めたり、旋回外輪の制動力を増加させて直進安定性能を高めたりすることができる。
【0045】
また運転者がブレーキペダル12を踏んでの制動中に、例えば左後輪が低摩擦係数路を踏んでロック傾向になったことを車輪速センサSd…の出力に基づいて検出した場合には、第1ブレーキアクチュエータ23Aの一方のインバルブ58を励磁して閉弁するとともに、一方のアウトバルブ61を励磁して開弁することで、左後輪のホイールシリンダ26のブレーキ液圧をリザーバ62に逃がして所定の圧力まで減圧した後、アウトバルブ61を消磁して閉弁することで、左後輪のホイールシリンダ26のブレーキ液圧を保持する。その結果、左後輪のホイールシリンダ26のロック傾向が解消に向かうと、インバルブ58を消磁して開弁することで、スレーブシリンダ42の第1出力ポート51Aからのブレーキ液圧を左後輪のホイールシリンダ26に供給して所定の圧力まで増圧することで、制動力を増加させる。
【0046】
この増圧によって左後輪が再びロック傾向になった場合には、前記減圧→保持→増圧を繰り返すことにより、左後輪のロックを抑制しながら制動距離を最小限に抑えるABS(アンチロック・ブレーキ・システム)制御を行うことができる。
【0047】
以上、左後輪のホイールシリンダ26がロック傾向になったときのABS制御について説明したが、右後輪のホイールシリンダ27、左前輪のホイールシリンダ30、右前輪のホイールシリンダ31がロック傾向になったときのABS制御も同様にして行うことができる。
【0048】
次に、図3に基づいて電源の失陥等によりスレーブシリンダ42が作動不能になった場合の作用について説明する。
【0049】
電源が失陥すると、常開型電磁弁よりなる第1、第2マスタカットバルブ32,33は自動的に開弁し、常閉型電磁弁よりなるシミュレータバルブ34は自動的に閉弁し、常開型電磁弁よりなるインバルブ56,56;58,58およびレギュレータバルブ54,54は自動的に開弁し、常閉型電磁弁よりなるアウトバルブ60,60;61,61およびサクションバルブ68,68は自動的に閉弁する。この状態では、マスタシリンダ11の第1、第2液圧室17,19に発生したブレーキ液圧は、ストロークシミュレータ35に吸収されることなく第1、第2マスタカットバルブ32,33、レギュレータバルブ54,54およびインバルブ56,56;58,58を通過して各車輪のディスクブレーキ装置24,25;30,31のホイールシリンダ26,27;30,31を作動させ、支障なく制動力を発生させることができる。
【0050】
このとき、マスタシリンダ11が発生するブレーキ液圧がスレーブシリンダ42の第1、第2液圧室50A,50Bに作用して第1、第2ピストン48A,48Bを後退させてしまうと、第1、第2液圧室50A,50Bの容積が拡大して前記ブレーキ液圧が減圧してしまい、ブレーキ液圧を維持しようとするとブレーキペダル12のストロークが増加してしまう可能性がある。しかしながら、スレーブシリンダ42のボールねじ機構46は、第1ピストン48A側から荷重が入力した場合には後退を抑制されるため、第1、第2液圧室50A,50Bの容積増加が軽減される。尚、スレーブシリンダ42の失陥時に第1、第2ピストン48A,48Bの後退を規制する部材を別途設けても良い。この場合は通常動作時に駆動抵抗を増加させない構造であることが望ましい。
【0051】
図4および図5に示すように、運転者が操作をしていないときにブレーキペダル12およびセンサアーム75は初点位置Aにあり、そこからブレーキペダル12およびセンサアーム75は中間位置Bおよび終点位置Cを経てフルストローク位置Dへと移動する。初点位置Aから終点位置Cまでの領域では、ブレーキペダル12のストロークがストロークセンサScにより検出され、終点位置Cからフルストローク位置Dまでの領域では、ブレーキペダル12のストロークがス第1液圧センサSaにより検出される。即ち、ブレーキペダル12のストロークに応じてマスタシリンダ11がブレーキ液圧を発生すると、そのブレーキ液圧が第1液圧センサSaにより検出されるが、そのブレーキ液圧はブレーキペダル12のストロークに対して相関関係にあるため、ブレーキ液圧からブレーキペダル12のストロークを検出することができる。尚、終点位置Cは、ストロークシミュレータ35のピストン38が最大限にストロークした状態に対応する。
【0052】
初点位置Aからフルストローク位置Dまでの全ての領域をストロークセンサScで検出しない理由は、そのようにすると、ストロークセンサScの分解能が低くなって検出精度が低下するためである。またブレーキペダル12の低ストローク領域をストロークセンサScで検出する理由は、低ストローク領域は高ストローク領域に比べて高い検出精度が要求されるので、第1液圧センサSaよりも検出精度が高いストロークセンサScで低ストローク領域をカバーするためである。
【0053】
さて、ブレーキペダル12を初点位置Aから終点位置Cに向けて踏み込むと、図5においてペダル部12aがペダル回動軸12bまわりに時計方向に回動し、ペダル部12aと一体のペダルアーム12cがペダル回動軸12bまわりに時計方向に回動する。その結果、ペダルアーム12cに設けたピン72にガイド溝75aを押圧されたセンサアーム75がセンサ回動軸74まわりに時計方向に回動し、ストロークセンサScがブレーキペダル12のストロークに応じた電圧を出力する。
【0054】
センサアーム75の中間位置Bは、初点位置Aおよび終点位置Cの中間に位置している。即ち、センサアーム75の初点位置Aから中間位置Bまでの回動角と、センサアーム75の中間位置Bから終点位置Cまでの回動角とは一致している。そしてセンサアーム75が中間位置Bにあるとき、ペダル回動軸12b、センサ回動軸74およびピン72は同一直線L上に位置している。言い換えると、センサアーム75が中間位置Bにあるとき、ペダルアーム12cの回動軌跡(つまりピン72の回動軌跡)の接線T1とセンサアーム75の回動軌跡の接線T2とが平行になる。
【0055】
ペダル回動軸12bとセンサ回動軸74とは距離βだけずれているため、ペダルアーム12cの回動角の変化量とセンサアーム75の回動角の変化量との比率は、ペダル回動軸12bおよびピン72の距離D1と、センサ回動軸74およびピン72の距離D2との比に応じた値となる。しかしながら、前記回動角の変化量の比率は一定値ではなく、ブレーキペダル12のストロークに応じて変化してしまい、これがブレーキペダル12のストロークとストロークセンサScの出力との間の線形性を損ねる原因となる。
【0056】
しかしながら本実施の形態によれば、センサアーム75が中間位置Bにあるとき、ペダルアーム12cの回動軌跡の接線T1とセンサアーム75の回動軌跡の接線T2とが平行になるようにペダルアーム12cおよびセンサアーム75を配置したので、ストロークセンサScの理想的な出力特性に対する実際の出力特性の誤差を中間位置Bの両側(つまり初点位置A側および終点位置C側)に均等に振り分け、前記誤差の最大値を減少させて出力特性の線形性を高めるとともに、ストロークセンサScの出力ゲインを高めることができる。特に、中間位置Bにおいてペダル回動軸12B、センサ回動軸74およびピン72を一つの直線L上に位置させるとともに、センサアーム75のガイド溝75aを前記直線L上に位置させたので、ストロークセンサScの理想的な出力特性に対する実際の出力特性の誤差を中間位置の両側に完全に均等に振り分けることができ、前記誤差の最大値を一層減少させることができる。
【0057】
これを図8に基づいて更に説明すると、ブレーキペダル12のペダルストロークが初点位置Aから終点位置Cへと増加すると、ストロークセンサScの出力電圧は正弦波状に増加するが、中間位置Bにおいて出力電圧が理想的な(リニアな)出力電圧の特性に交差する、従って、理想的な出力電圧の特性に対する誤差は、中間位置Bを挟んで初点位置A側と終点位置C側に均等に振り分けられ、誤差の最大値を最小限に抑えることができる。これに対し、図9に示す従来例では、理想的な出力電圧の特性に対する誤差が中間位置Bの前後に均等に振り分けられていないため、誤差の最大値が大きくなっている。
【0058】
ところで、ホール素子を用いたストロークセンサScは、原理的に外部磁力の影響を受ける虞があるため、それをカバー76で覆うことで磁力を遮蔽する効果が期待できる。センサアーム75とペダルアーム12cとを結合するピン72が外れてしまった場合に、センサアーム75が分離位置Eへと回動したときでも、そのセンサアーム75と干渉しないようにカバー76が設けられているため、カバー76との干渉によってセンサアーム75の分離位置Eへの回動が阻害されることはない。
【0059】
またシステムの正常時には、ブレーキペダル12は初点位置Aから終点位置Cまでの範囲でストロークできるようにシミュレータバルブ34が制御されるため、システムの正常時にブレーキペダル12を操作可能な領域でストロークセンサScの検出精度を高めることができる。
【0060】
以上、本発明の実施の形態を説明したが、本発明はその要旨を逸脱しない範囲で種々の設計変更を行うことが可能である。
【0061】
例えば、実施の形態ではセンサアーム75が、ブレーキペダル12が操作されていないときの初点位置Aと、ブレーキペダル12が所定量操作されたときの終点位置Cとの間の中間位置Bに存在するときに、ペダルアーム12cの回動軌跡の接線T1とセンサアーム75の回動軌跡の接線T2とが平行になるように設定しているが、ストロークセンサScの分解能を他の領域よりも高く設定する必要がある領域において、上記のように設定することができる。
【0062】
また実施の形態ではペダルアーム12cをペダル部12aと別部材で構成して一体に結合しているが、それらを一部材で構成しても良い。
【0063】
またペダルアーム12cおよびセンサアーム75の回動方向は実施の形態に限定されるものではなく、ブレーキペダル12の操作に応じて時計方向あるいは反時計方向に回動するものであれば良い。
【符号の説明】
【0064】
11 マスタシリンダ
12 ブレーキペダル
12a ペダル部
12b ペダル回動軸
12c ペダルアーム
35 トロークシミュレータ
42 スレーブシリンダ
72 ピン(リンク手段)
74 センサ回動軸
75 センサアーム
75a ガイド溝
76 カバー
L 直線
Sa 第1液圧センサ(液圧センサ)
Sc ストロークセンサ
T1 ペダルアームの回動軌跡の接線
T2 センサアームの回動軌跡の接線
【特許請求の範囲】
【請求項1】
ブレーキペダル(12)と、前記ブレーキペダル(12)のストロークを検出するストロークセンサ(Sc)と、前記ストロークセンサ(Sc)の検出値に基づいて制動力を発生する制動力発生手段とを備え、
前記ブレーキペダル(12)は、運転者により操作されるペダル部(12a)と、前記ペダル部(12a)を車体に回動可能に支持するペダル回動軸(12b)と、前記ペダル部(12a)の回動に応じて前記ペダル回動軸(12b)まわりに回動するペダルアーム(12c)とを備え、
前記ストロークセンサ(Sc)は、前記ペダル回動軸(12b)とは軸心を異にして平行に配置されるセンサ回動軸(74)と、前記ペダルアーム(12c)の回動により前記センサ回動軸(74)まわりに回動するセンサアーム(75)とを備える車両用ブレーキ装置において、
前記ブレーキペダル(12)のストロークの中で、前記ストロークセンサ(Sc)の分解能を他の領域よりも高く設定する領域で、前記ペダルアーム(12c)の回動軌跡の接線(T1)と前記センサアーム(75)の回動軌跡の接線(T2)とが平行になるように、前記ペダルアーム(12c)および前記センサアーム(75)を配置したことを特徴とする車両用ブレーキ装置。
【請求項2】
前記ストロークセンサ(Sc)の分解能を他の領域よりも高く設定する領域は、前記センサアーム(75)が、前記ブレーキペダル(12)が操作されていないときの初点位置(A)と、前記ブレーキペダル(12)が所定量操作されたときの終点位置(C)との間の中間位置(B)に存在する領域であることを特徴とする、請求項1に記載の車両用ブレーキ装置。
【請求項3】
前記ペダルアーム(12c)と前記センサアーム(75)との間に介在するリンク手段(72)を備え、前記ストロークセンサ(Sc)の分解能を他の領域よりも高く設定する領域にあるときに、前記ペダル回動軸(12b)、前記センサ回動軸(74)および前記リンク手段(72)が一つの直線(L)上に位置することを特徴とする、請求項1または請求項2に記載の車両用ブレーキ装置。
【請求項4】
前記センサアーム(75)は、前記リンク手段(72)が摺動自在に係合するガイド溝(75a)を備え、前記ストロークセンサ(Sc)の分解能を他の領域よりも高く設定する領域にあるときに、前記ガイド溝(75a)は前記直線(L)と平行になるように配置されることを特徴とする、請求項1〜請求項3の何れか1項に記載の車両用ブレーキ装置。
【請求項5】
前記制動力発生手段は、前記ブレーキペダル(12)の操作に応じてブレーキ液圧を発生するマスタシリンダ(11)と、前記マスタシリンダ(11)に接続されて前記ブレーキペダル(12)に擬似的な操作反力を付与するストロークシミュレータ(35)と、少なくとも前記ブレーキペダル(12)の操作に応じた電気信号によりブレーキ液圧を発生するスレーブシリンダ(42)とを備え、前記ストロークシミュレータ(35)は、前記ブレーキペダル(12)の操作に基づいて操作反力を発生するとともに、前記終点位置(C)は前記ストロークシミュレータ(35)の最大ストローク位置に対応することを特徴とする、請求項2に記載の車両用ブレーキ装置。
【請求項6】
前記マスタシリンダ(11)が発生するブレーキ液圧を検出する液圧センサ(Sa)を備え、
前記ストロークシミュレータ(35)が最大ストローク位置に達するまでの前記ブレーキペダル(12)のストロークを前記ストロークセンサ(Sc)により検出し、前記ストロークシミュレータ(35)が最大ストローク位置に達した後の前記ブレーキペダル(12)のストロークを前記液圧センサ(Sa)により検出することを特徴とする、請求項5に記載の車両用ブレーキ装置。
【請求項7】
前記ペダルアーム(12c)および前記センサアーム(75)の連結が解除されたときに、前記センサアーム(75)が前記ペダル回動軸(12b)まわりに回動する領域を覆うカバー(76)を設けたことを特徴とする、請求項1〜請求項6の何れか1項に記載の車両用ブレーキ装置。
【請求項1】
ブレーキペダル(12)と、前記ブレーキペダル(12)のストロークを検出するストロークセンサ(Sc)と、前記ストロークセンサ(Sc)の検出値に基づいて制動力を発生する制動力発生手段とを備え、
前記ブレーキペダル(12)は、運転者により操作されるペダル部(12a)と、前記ペダル部(12a)を車体に回動可能に支持するペダル回動軸(12b)と、前記ペダル部(12a)の回動に応じて前記ペダル回動軸(12b)まわりに回動するペダルアーム(12c)とを備え、
前記ストロークセンサ(Sc)は、前記ペダル回動軸(12b)とは軸心を異にして平行に配置されるセンサ回動軸(74)と、前記ペダルアーム(12c)の回動により前記センサ回動軸(74)まわりに回動するセンサアーム(75)とを備える車両用ブレーキ装置において、
前記ブレーキペダル(12)のストロークの中で、前記ストロークセンサ(Sc)の分解能を他の領域よりも高く設定する領域で、前記ペダルアーム(12c)の回動軌跡の接線(T1)と前記センサアーム(75)の回動軌跡の接線(T2)とが平行になるように、前記ペダルアーム(12c)および前記センサアーム(75)を配置したことを特徴とする車両用ブレーキ装置。
【請求項2】
前記ストロークセンサ(Sc)の分解能を他の領域よりも高く設定する領域は、前記センサアーム(75)が、前記ブレーキペダル(12)が操作されていないときの初点位置(A)と、前記ブレーキペダル(12)が所定量操作されたときの終点位置(C)との間の中間位置(B)に存在する領域であることを特徴とする、請求項1に記載の車両用ブレーキ装置。
【請求項3】
前記ペダルアーム(12c)と前記センサアーム(75)との間に介在するリンク手段(72)を備え、前記ストロークセンサ(Sc)の分解能を他の領域よりも高く設定する領域にあるときに、前記ペダル回動軸(12b)、前記センサ回動軸(74)および前記リンク手段(72)が一つの直線(L)上に位置することを特徴とする、請求項1または請求項2に記載の車両用ブレーキ装置。
【請求項4】
前記センサアーム(75)は、前記リンク手段(72)が摺動自在に係合するガイド溝(75a)を備え、前記ストロークセンサ(Sc)の分解能を他の領域よりも高く設定する領域にあるときに、前記ガイド溝(75a)は前記直線(L)と平行になるように配置されることを特徴とする、請求項1〜請求項3の何れか1項に記載の車両用ブレーキ装置。
【請求項5】
前記制動力発生手段は、前記ブレーキペダル(12)の操作に応じてブレーキ液圧を発生するマスタシリンダ(11)と、前記マスタシリンダ(11)に接続されて前記ブレーキペダル(12)に擬似的な操作反力を付与するストロークシミュレータ(35)と、少なくとも前記ブレーキペダル(12)の操作に応じた電気信号によりブレーキ液圧を発生するスレーブシリンダ(42)とを備え、前記ストロークシミュレータ(35)は、前記ブレーキペダル(12)の操作に基づいて操作反力を発生するとともに、前記終点位置(C)は前記ストロークシミュレータ(35)の最大ストローク位置に対応することを特徴とする、請求項2に記載の車両用ブレーキ装置。
【請求項6】
前記マスタシリンダ(11)が発生するブレーキ液圧を検出する液圧センサ(Sa)を備え、
前記ストロークシミュレータ(35)が最大ストローク位置に達するまでの前記ブレーキペダル(12)のストロークを前記ストロークセンサ(Sc)により検出し、前記ストロークシミュレータ(35)が最大ストローク位置に達した後の前記ブレーキペダル(12)のストロークを前記液圧センサ(Sa)により検出することを特徴とする、請求項5に記載の車両用ブレーキ装置。
【請求項7】
前記ペダルアーム(12c)および前記センサアーム(75)の連結が解除されたときに、前記センサアーム(75)が前記ペダル回動軸(12b)まわりに回動する領域を覆うカバー(76)を設けたことを特徴とする、請求項1〜請求項6の何れか1項に記載の車両用ブレーキ装置。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−103634(P2013−103634A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−249516(P2011−249516)
【出願日】平成23年11月15日(2011.11.15)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月15日(2011.11.15)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]