
車両用ヘッドアップディスプレイ装置
【課題】他車両の位置を正確に報知できる車両用ヘッドアップディスプレイ装置を提供する。
【解決手段】表示手段4は、投影部材5に表示光L1を投射して虚像V1を表示する。検出手段は、自車両から他車両までの距離を検出して距離データを出力する。制御手段は、距離データに基づいて他車両の位置を指し示す虚像V1を表示手段に表示させる。制御手段は、距離データに基づいて、虚像V1が所定箇所を中心に回動するように、虚像V1を表示手段に表示させる。
【解決手段】表示手段4は、投影部材5に表示光L1を投射して虚像V1を表示する。検出手段は、自車両から他車両までの距離を検出して距離データを出力する。制御手段は、距離データに基づいて他車両の位置を指し示す虚像V1を表示手段に表示させる。制御手段は、距離データに基づいて、虚像V1が所定箇所を中心に回動するように、虚像V1を表示手段に表示させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、他車両の接近を報知する車両用ヘッドアップディスプレイ装置に関するものである。
【背景技術】
【0002】
従来より、自車両に接近する他車両を報知する車両用警報表示装置が種々提案されており、例えば特許文献1に開示されている。斯かる車両用警報表示装置は、メータ位置などに設置する警報表示器や、後方確認用ミラー(ドアミラーやルームミラー)に警告表示を出して、車線変更時に後方から接近する他車両を報知するものである。この車両用警報表示装置の警報処理ECUは、まず周囲測距センサの検出値に基づいて、自車両に接近する他車両が存在するかどうかを判断し、自車両の後方から近づく他車両が存在するときは、バックミラー方向への矢印表示を示すLEDを所定時間だけ点滅させ、自車両の左後側方から近づく他車両が存在するときは、左サイドミラー方向への矢印表示を示すLEDを所定時間だけ点滅させ、自車両の右後側方から近づく他車両が存在するときは、右サイドミラー方向への矢印表示を示すLEDを所定時間だけ点滅させる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−9320号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、前述した車両用警報表示装置では、自車両に接近する他車両の大まかな方向しか把握できないという問題を有していた。つまり、左サイドミラー方向への矢印表示を示すLEDが点滅すれば、他車両が自車両の左後側方から近づいていることが把握でき、右サイドミラー方向への矢印表示を示すLEDが点滅すれば、他車両が自車両の右後側方から近づいていることが把握できるが、他車両の正確な位置を報知することができなかった。
本発明は、この問題に鑑みなされたものであり、他車両の位置を正確に報知できる車両用ヘッドアップディスプレイ装置を提供するものである。
【課題を解決するための手段】
【0005】
本発明は、請求項1に記載したように、投影部材5に表示光L1を投射して虚像V1を表示する表示手段4と、自車両73から他車両74までの距離を検出して距離データを出力する検出手段1と、前記距離データに基づいて前記他車両74の位置を指し示す前記虚像V1を前記表示手段1に表示させる制御手段3と、を備えたものである。
【0006】
また、本発明は、請求項2に記載したように、前記制御手段3は、前記距離データに基づいて、前記虚像V1が所定箇所72を中心に回動するように、前記虚像V1を前記表示手段4に表示させるものである。
【0007】
また、本発明は、請求項3に記載したように、前記表示手段4は、第一の表示光L1を発する第一の表示器11と、第二の表示光L2を発する第二の表示器12と、前記第一の表示光L1を透過させると共に前記第二の表示光L2を反射させる透過反射板13と、を有するものである。
【0008】
また、本発明は、請求項4に記載したように、前記第一の表示器11は、前記透過反射板13に対して第一の所定角度A1を有して配置された第一の表示パネル16を有し、前記第二の表示器12は、前記透過反射板13に対して第二の所定角度A2を有して配置された第二の表示パネル26を有するものである。
【発明の効果】
【0009】
他車両の位置を指し示す虚像を表示することによって、車両運転者に他車両の位置を正確に報知できる。
【図面の簡単な説明】
【0010】
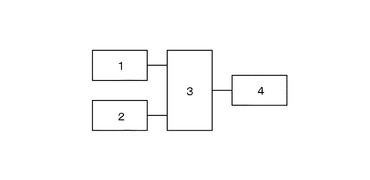
【図1】本発明の実施形態を示すブロック図。
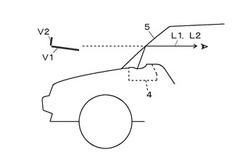
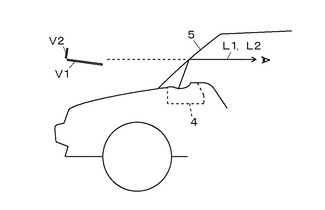
【図2】同上実施形態を示す自車両の側面図。
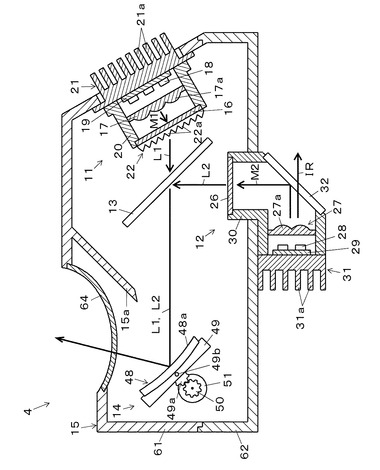
【図3】同上実施形態を示す表示手段の断面図。
【図4】同上実施形態を示すプリズムシートの側面図。
【図5】同上実施形態を示す表示手段の要部説明図。
【図6】同上実施形態を示す虚像の拡大図。
【図7】同上実施形態を示す概略説明図。
【図8】同上実施形態を示す回転角の特性説明図。
【図9】同上実施形態を示す領域の説明図。
【図10】同上実施形態を示す表示色の表図。
【図11】同上実施形態を示す残像の説明図。
【発明を実施するための形態】
【0011】
以下、添付図面に基づいて、本発明の一実施形態を説明する。車両用ヘッドアップディスプレイ装置は、測距センサ1(検出手段)と、車速センサ2と、制御部3(制御手段)と、表示手段4とを備えている。
【0012】
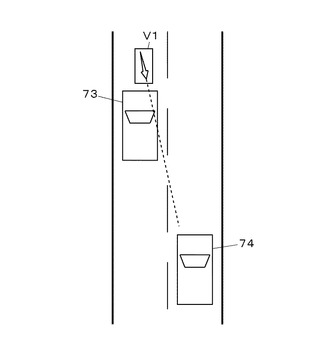
測距センサ1は、車両コーナーに設置されたミリ波レーダー等のレーダー装置であり、自車両73の斜め後方をセンシングして、自車両73の斜め後方から接近する他車両74までの相対距離を検出し、相対距離データを出力する。また、測距センサ1は、単位時間毎の相対距離データの変化に基づいて、自車両73と他車両74との相対速度を算出し、相対速度データも出力する。なお、測距センサ1は、超音波レーダーやスキャン式の光学レーザーでも良く、カメラ画像の画像解析による距離測定や、自車両73と他車両74の車両情報を車車間通信でやりとりするシステムにおいて、相対距離と相対速度を出力する方法でも良い。
【0013】
車速センサ2は、自車両73の走行速度を検出し、速度データを出力する。制御部3は、測距センサ1と車速センサ2から入力した相対距離データ及び速度データに基づいて、表示手段4に表示する表示内容を生成し、表示信号を出力する。
【0014】
表示手段4は、第一の液晶表示器11(第一の表示器)と、第二の液晶表示器12(第二の表示器)と、ハーフミラー13(透過反射板)と、反射器14とを有している。ハーフミラー13は傾斜配置されており、このハーフミラー13の後方に第一の液晶表示器11が配置されて、ハーフミラー13の下方に第二の液晶表示器12が配置されている。液晶表示器11,12,ハーフミラー13及び反射器14は、ハウジング15に収容されている。
【0015】
第一の液晶表示器11は、液晶表示パネル16(第一の表示パネル),レンズ部材17,発光ダイオード18,硬質配線板19,ケース体20,ヒートシンク21,プリズムシート22を有している。
【0016】
液晶表示パネル16は、TFT型液晶セルの前後両面に偏光膜を貼着したものである。レンズ部材17は、ポリカーボネート等の透光性樹脂からなるものであり、複数の凸レンズ部17aを有している。レンズ部材17は、液晶表示パネル16と発光ダイオード18の間に配置されている。複数の発光ダイオード18は、互いに近接して配置されており、硬質配線板19に搭載されている。レンズ部材17の各凸レンズ部17aは、夫々、発光ダイオード18に対応する箇所に設けられており、発光ダイオード18が発した光を集光させる。
【0017】
ケース体20は、白色の樹脂からなるものであり、略角筒形状となっている。液晶表示パネル16は、ケース体20の開口端に設けられており、発光ダイオード18から発せられ、レンズ部材17で集光された照明光M1により透過照明される。ヒートシンク21は、熱伝導性が良好な金属(例えばアルミニウム)からなるものであり、複数の放熱フィン21aを有している。ヒートシンク21は、硬質配線板19の後面に配置されており、発光ダイオード18が発した熱をハウジング15の外に放出する。
【0018】
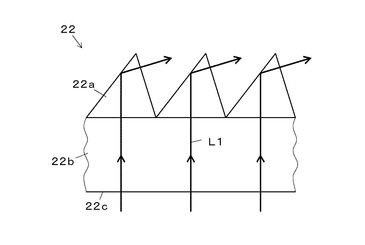
プリズムシート22は、複数の微細なプリズム部22aと基材22bとを有しており、液晶表示パネル16の前面側に配置されている。液晶表示パネル16を透過した表示光L1は、プリズムシート22の後面22cから入射し、プリズム部22aによって反射される(図4参照)。プリズムシート22の後面22cは、液晶表示パネル16と平行になっている。
【0019】
第二の液晶表示器12は、液晶表示パネル26(第二の表示パネル),レンズ部材27,発光ダイオード28,硬質配線板29,ケース体30,ヒートシンク31,コールドミラー32を有している。
【0020】
液晶表示パネル26は、TFT型液晶セルの前後両面に偏光膜を貼着したものである。レンズ部材27は、複数の凸レンズ部27aを有している。複数の発光ダイオード28は、互いに近接して配置されており、硬質配線板29に搭載されている。レンズ部材27の各凸レンズ部27aは、夫々、発光ダイオード28に対応する箇所に設けられており、発光ダイオード28が発した光を集光する。
【0021】
ケース体30は白色の樹脂からなるものであり、このケース体30の開口端に液晶表示パネル26が設けられている。液晶表示パネル26は、発光ダイオード28により透過照明される。ヒートシンク31は、放熱フィン31aを有しており、硬質配線板29の後面に配置されている。ヒートシンク31は、発光ダイオード18が発した熱を放出する。コールドミラー32は、発光ダイオード28が発した可視光からなる照明光M2を反射させると共に、赤外線IRを透過させる。
【0022】
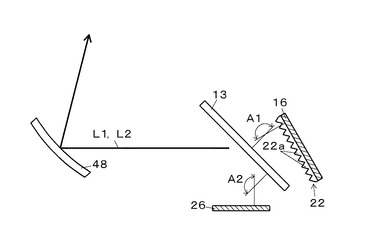
ハーフミラー13は、ガラス基板に反射膜を蒸着形成したものであり、ハウジング15内に傾斜配置されている。ハーフミラー13は、第一の表示器11が発した表示光L1を透過させると共に、第二の表示器12が発した表示光L2を反射させる。液晶表示パネル16は、ハーフミラー13に対して第一の所定角度A1を有して配置されており、液晶表示パネル26は、ハーフミラー13に対して第二の所定角度A2を有して配置されている(図5参照)。
【0023】
反射器14は、凹面鏡48,ミラーホルダー49,歯車50及びステッピングモータ51からなるものである。凹面鏡48は、表示光Lを反射させ、車両のフロントガラスに投射する。凹面鏡48はミラーホルダー49に両面粘着テープにより接着されている。凹面鏡48は、ポリカーボネート(PC)等の樹脂にアルミニウム(Al)を蒸着させ反射膜を形成したものである。ミラーホルダー49はPBT等の樹脂からなるものであり、歯車部49a及び軸部49bが一体に形成されている。軸部49bはハウジング15に設けられた軸受部(図示しない)に軸支されている。
【0024】
ステッピングモータ51は、凹面鏡48を回動させ、表示光Lの投射方向を調整する。歯車50はステッピングモータ51の回動軸に取付けられており、歯車部49aと噛み合わされている。運転者4は、押ボタンスイッチ(図示しない)を操作し、表示光Lが目の位置に反射されるように、凹面鏡48の角度を調整する。
【0025】
ハウジング15は、上側ケース61と下側ケース62とからなるものであり、上側ケース61には、表示光Lが出射する窓部64が設けられている。この窓部64は、透光性樹脂(例えばアクリル)からなるものであり、湾曲形状になっている。ハウジング15の上側ケース61には遮光壁15aが設けられており、太陽光等の外光が液晶表示器11,12に入射し虚像V1,V2が見えにくくなる現象(ウォッシュアウト)を防止している。遮光壁15aは平板形状になっており、上側ケース61の上部から斜めに垂下するように形成されている。
【0026】
液晶表示パネル16は、他車両74の位置を指し示す矢印を表示し、液晶表示器11が発した表示光L1によって、虚像V1が表示される。液晶表示パネル16は、光軸に対して傾斜配置されており、虚像V1は、側面視で略水平に表示される。液晶表示パネル26は、自車両73から他車両74までの相対距離をデジタル表示し、液晶表示器12が発した表示光L2によって、虚像V2が表示される。液晶表示パネル26は、光軸に対して垂直配置されており、虚像V2は、側面視で略垂直に表示される。
【0027】
表示手段4は、奥行きのある表示表現が可能であり、フロントガラス5(投影部材)に表示光L1を投射して、車両前方の道路に概ね平行な虚像V1を表示できる。なお、奥行きのある表示表現が可能な表示手段として、両眼立体視による立体視が可能な表示器又は表示システムを用いることで奥行きのある虚像を表示しても良い。
【0028】
次に、表示手段4に表示する表示内容を制御部3で生成する方法について説明する。
【0029】
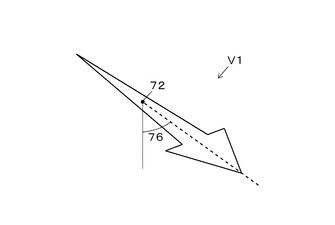
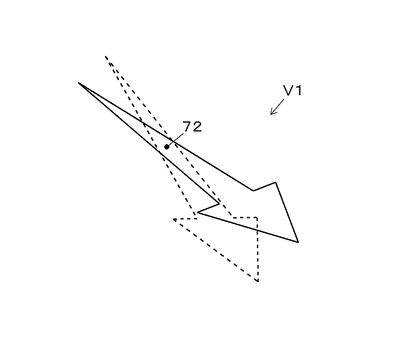
図7は、自車両73に対する虚像V1の表示像位置を表しており、表示手段4によって自車両73の前方に道路面と概ね平行に表示される。なお、虚像V1は対象の方向が示せる表現であればよく、例えば一つ以上の三角形や長手方向に伸びた長方形でも良い。更に、平面的な図形だけでなく、立体的な三角錐や円錐などでも良い。
【0030】
虚像V1は回転軸72(所定箇所)を中心に回転角76だけ回転して表示する。この回転角76は、測距センサ1によって検出された他車両74との相対距離に基づいて決定する。
【0031】
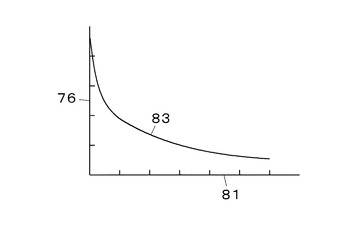
図8に相対距離81と回転角76との関係を図示する。横軸は相対距離81であり、縦軸は回転角76であり、特性曲線83によって相対距離81に対する回転角76の関係を表している。相対距離81が長いと回転角76は小さくなり、後方からの他車両74が接近するにつれて相対距離81が短くなると回転角76は大きくなる。この表示制御によって、後方からの他車両74が存在する位置を矢印の方向から直感的に認知することができる。
【0032】
次に、後方からの他車両74との相対速度と相対距離に基づく矢印表示の表示制御方法について説明する。
【0033】
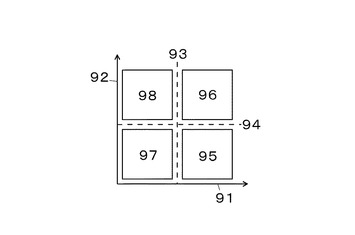
矢印表示の表現方法は、緊急度のレベルに応じて変化させる。図9に示すように、緊急度のレベルは相対距離データと相対速度データの状況に応じて決定する。横軸は相対速度91であり、縦軸は相対距離92である。相対速度91と相対距離92にはそれぞれ相対速度閾値93と相対距離閾値94があり、この閾値93,94によって4つの領域95,96,97,98に分けられる。なお、この閾値はそれぞれ2つ以上であっても良く、領域が6つ以上に分けられても良い。
【0034】
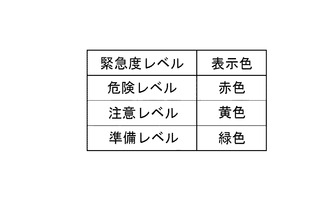
測距センサ1から入力された相対速度データと相対距離データから緊急度レベルを決定し、各緊急度レベルに応じて矢印表示の表示方法を変化させる。例えば、緊急度レベルが危険レベルの領域95である場合、矢印の色を危険表示色にて表示する。緊急度レベルが注意レベルの領域96,97である場合、矢印の色を注意表示色にて表示する。緊急度レベルが準備レベルの領域98である場合、矢印の色を準備表示色にて表示する(図10参照)。なお、矢印の表示変化は色による変化の他に、矢印の太さ、矢印の頭部分の大きさや鋭さ、矢印の長さ、点滅の有無や点滅周期などの変化を用いても良い。この表示制御によって、注意すべき後方からの接近物の存在方向だけでなく、相対速度と相対距離からなる緊急度も短時間且つ正確に認知することができる。
【0035】
次に、後方の他車両74との相対速度の変化量が急激に変化した場合の表示制御方法について説明する。通常、相対距離データに基づいて回転角76を随時変化させるが、相対速度の変化量が一定の値を超えた時、図11に示すように過去の矢印表示を残像のように一定時間表示する。図11では、ある時間tにおける矢印表示を残像表示として薄い階調で表示し、時間tから一定時間経過したt+t0時間での矢印表示は本表示として通常の階調で表示している。ここでt0とは、残像表示と本表示との時間差を表わす。
【0036】
尚、時間tにおける矢印表示は薄い階調で表示するだけでなく、輪郭線のみで表示する方法や矢印の幅を狭くするなどしても良い。また、反対に時間t+t0の矢印表示を強調するような輪郭線を追加するなどしても良い。この表示制御によって、高速に接近する後方接近物の存在を、その存在位置と共に瞬間的に認知することができる。
【符号の説明】
【0037】
1 測距センサ(検出手段)
3 制御部(制御手段)
4 表示手段
5 フロントガラス(投影部材)
11 第一の液晶表示器(第一の表示器)
12 第二の液晶表示器(第二の表示器)
13 ハーフミラー13(透過反射板)
16 液晶表示パネル(第一の表示パネル)
26 液晶表示パネル(第二の表示パネル)
72 回転軸(所定箇所)
73 自車両
74 他車両
【技術分野】
【0001】
本発明は、他車両の接近を報知する車両用ヘッドアップディスプレイ装置に関するものである。
【背景技術】
【0002】
従来より、自車両に接近する他車両を報知する車両用警報表示装置が種々提案されており、例えば特許文献1に開示されている。斯かる車両用警報表示装置は、メータ位置などに設置する警報表示器や、後方確認用ミラー(ドアミラーやルームミラー)に警告表示を出して、車線変更時に後方から接近する他車両を報知するものである。この車両用警報表示装置の警報処理ECUは、まず周囲測距センサの検出値に基づいて、自車両に接近する他車両が存在するかどうかを判断し、自車両の後方から近づく他車両が存在するときは、バックミラー方向への矢印表示を示すLEDを所定時間だけ点滅させ、自車両の左後側方から近づく他車両が存在するときは、左サイドミラー方向への矢印表示を示すLEDを所定時間だけ点滅させ、自車両の右後側方から近づく他車両が存在するときは、右サイドミラー方向への矢印表示を示すLEDを所定時間だけ点滅させる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−9320号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、前述した車両用警報表示装置では、自車両に接近する他車両の大まかな方向しか把握できないという問題を有していた。つまり、左サイドミラー方向への矢印表示を示すLEDが点滅すれば、他車両が自車両の左後側方から近づいていることが把握でき、右サイドミラー方向への矢印表示を示すLEDが点滅すれば、他車両が自車両の右後側方から近づいていることが把握できるが、他車両の正確な位置を報知することができなかった。
本発明は、この問題に鑑みなされたものであり、他車両の位置を正確に報知できる車両用ヘッドアップディスプレイ装置を提供するものである。
【課題を解決するための手段】
【0005】
本発明は、請求項1に記載したように、投影部材5に表示光L1を投射して虚像V1を表示する表示手段4と、自車両73から他車両74までの距離を検出して距離データを出力する検出手段1と、前記距離データに基づいて前記他車両74の位置を指し示す前記虚像V1を前記表示手段1に表示させる制御手段3と、を備えたものである。
【0006】
また、本発明は、請求項2に記載したように、前記制御手段3は、前記距離データに基づいて、前記虚像V1が所定箇所72を中心に回動するように、前記虚像V1を前記表示手段4に表示させるものである。
【0007】
また、本発明は、請求項3に記載したように、前記表示手段4は、第一の表示光L1を発する第一の表示器11と、第二の表示光L2を発する第二の表示器12と、前記第一の表示光L1を透過させると共に前記第二の表示光L2を反射させる透過反射板13と、を有するものである。
【0008】
また、本発明は、請求項4に記載したように、前記第一の表示器11は、前記透過反射板13に対して第一の所定角度A1を有して配置された第一の表示パネル16を有し、前記第二の表示器12は、前記透過反射板13に対して第二の所定角度A2を有して配置された第二の表示パネル26を有するものである。
【発明の効果】
【0009】
他車両の位置を指し示す虚像を表示することによって、車両運転者に他車両の位置を正確に報知できる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態を示すブロック図。
【図2】同上実施形態を示す自車両の側面図。
【図3】同上実施形態を示す表示手段の断面図。
【図4】同上実施形態を示すプリズムシートの側面図。
【図5】同上実施形態を示す表示手段の要部説明図。
【図6】同上実施形態を示す虚像の拡大図。
【図7】同上実施形態を示す概略説明図。
【図8】同上実施形態を示す回転角の特性説明図。
【図9】同上実施形態を示す領域の説明図。
【図10】同上実施形態を示す表示色の表図。
【図11】同上実施形態を示す残像の説明図。
【発明を実施するための形態】
【0011】
以下、添付図面に基づいて、本発明の一実施形態を説明する。車両用ヘッドアップディスプレイ装置は、測距センサ1(検出手段)と、車速センサ2と、制御部3(制御手段)と、表示手段4とを備えている。
【0012】
測距センサ1は、車両コーナーに設置されたミリ波レーダー等のレーダー装置であり、自車両73の斜め後方をセンシングして、自車両73の斜め後方から接近する他車両74までの相対距離を検出し、相対距離データを出力する。また、測距センサ1は、単位時間毎の相対距離データの変化に基づいて、自車両73と他車両74との相対速度を算出し、相対速度データも出力する。なお、測距センサ1は、超音波レーダーやスキャン式の光学レーザーでも良く、カメラ画像の画像解析による距離測定や、自車両73と他車両74の車両情報を車車間通信でやりとりするシステムにおいて、相対距離と相対速度を出力する方法でも良い。
【0013】
車速センサ2は、自車両73の走行速度を検出し、速度データを出力する。制御部3は、測距センサ1と車速センサ2から入力した相対距離データ及び速度データに基づいて、表示手段4に表示する表示内容を生成し、表示信号を出力する。
【0014】
表示手段4は、第一の液晶表示器11(第一の表示器)と、第二の液晶表示器12(第二の表示器)と、ハーフミラー13(透過反射板)と、反射器14とを有している。ハーフミラー13は傾斜配置されており、このハーフミラー13の後方に第一の液晶表示器11が配置されて、ハーフミラー13の下方に第二の液晶表示器12が配置されている。液晶表示器11,12,ハーフミラー13及び反射器14は、ハウジング15に収容されている。
【0015】
第一の液晶表示器11は、液晶表示パネル16(第一の表示パネル),レンズ部材17,発光ダイオード18,硬質配線板19,ケース体20,ヒートシンク21,プリズムシート22を有している。
【0016】
液晶表示パネル16は、TFT型液晶セルの前後両面に偏光膜を貼着したものである。レンズ部材17は、ポリカーボネート等の透光性樹脂からなるものであり、複数の凸レンズ部17aを有している。レンズ部材17は、液晶表示パネル16と発光ダイオード18の間に配置されている。複数の発光ダイオード18は、互いに近接して配置されており、硬質配線板19に搭載されている。レンズ部材17の各凸レンズ部17aは、夫々、発光ダイオード18に対応する箇所に設けられており、発光ダイオード18が発した光を集光させる。
【0017】
ケース体20は、白色の樹脂からなるものであり、略角筒形状となっている。液晶表示パネル16は、ケース体20の開口端に設けられており、発光ダイオード18から発せられ、レンズ部材17で集光された照明光M1により透過照明される。ヒートシンク21は、熱伝導性が良好な金属(例えばアルミニウム)からなるものであり、複数の放熱フィン21aを有している。ヒートシンク21は、硬質配線板19の後面に配置されており、発光ダイオード18が発した熱をハウジング15の外に放出する。
【0018】
プリズムシート22は、複数の微細なプリズム部22aと基材22bとを有しており、液晶表示パネル16の前面側に配置されている。液晶表示パネル16を透過した表示光L1は、プリズムシート22の後面22cから入射し、プリズム部22aによって反射される(図4参照)。プリズムシート22の後面22cは、液晶表示パネル16と平行になっている。
【0019】
第二の液晶表示器12は、液晶表示パネル26(第二の表示パネル),レンズ部材27,発光ダイオード28,硬質配線板29,ケース体30,ヒートシンク31,コールドミラー32を有している。
【0020】
液晶表示パネル26は、TFT型液晶セルの前後両面に偏光膜を貼着したものである。レンズ部材27は、複数の凸レンズ部27aを有している。複数の発光ダイオード28は、互いに近接して配置されており、硬質配線板29に搭載されている。レンズ部材27の各凸レンズ部27aは、夫々、発光ダイオード28に対応する箇所に設けられており、発光ダイオード28が発した光を集光する。
【0021】
ケース体30は白色の樹脂からなるものであり、このケース体30の開口端に液晶表示パネル26が設けられている。液晶表示パネル26は、発光ダイオード28により透過照明される。ヒートシンク31は、放熱フィン31aを有しており、硬質配線板29の後面に配置されている。ヒートシンク31は、発光ダイオード18が発した熱を放出する。コールドミラー32は、発光ダイオード28が発した可視光からなる照明光M2を反射させると共に、赤外線IRを透過させる。
【0022】
ハーフミラー13は、ガラス基板に反射膜を蒸着形成したものであり、ハウジング15内に傾斜配置されている。ハーフミラー13は、第一の表示器11が発した表示光L1を透過させると共に、第二の表示器12が発した表示光L2を反射させる。液晶表示パネル16は、ハーフミラー13に対して第一の所定角度A1を有して配置されており、液晶表示パネル26は、ハーフミラー13に対して第二の所定角度A2を有して配置されている(図5参照)。
【0023】
反射器14は、凹面鏡48,ミラーホルダー49,歯車50及びステッピングモータ51からなるものである。凹面鏡48は、表示光Lを反射させ、車両のフロントガラスに投射する。凹面鏡48はミラーホルダー49に両面粘着テープにより接着されている。凹面鏡48は、ポリカーボネート(PC)等の樹脂にアルミニウム(Al)を蒸着させ反射膜を形成したものである。ミラーホルダー49はPBT等の樹脂からなるものであり、歯車部49a及び軸部49bが一体に形成されている。軸部49bはハウジング15に設けられた軸受部(図示しない)に軸支されている。
【0024】
ステッピングモータ51は、凹面鏡48を回動させ、表示光Lの投射方向を調整する。歯車50はステッピングモータ51の回動軸に取付けられており、歯車部49aと噛み合わされている。運転者4は、押ボタンスイッチ(図示しない)を操作し、表示光Lが目の位置に反射されるように、凹面鏡48の角度を調整する。
【0025】
ハウジング15は、上側ケース61と下側ケース62とからなるものであり、上側ケース61には、表示光Lが出射する窓部64が設けられている。この窓部64は、透光性樹脂(例えばアクリル)からなるものであり、湾曲形状になっている。ハウジング15の上側ケース61には遮光壁15aが設けられており、太陽光等の外光が液晶表示器11,12に入射し虚像V1,V2が見えにくくなる現象(ウォッシュアウト)を防止している。遮光壁15aは平板形状になっており、上側ケース61の上部から斜めに垂下するように形成されている。
【0026】
液晶表示パネル16は、他車両74の位置を指し示す矢印を表示し、液晶表示器11が発した表示光L1によって、虚像V1が表示される。液晶表示パネル16は、光軸に対して傾斜配置されており、虚像V1は、側面視で略水平に表示される。液晶表示パネル26は、自車両73から他車両74までの相対距離をデジタル表示し、液晶表示器12が発した表示光L2によって、虚像V2が表示される。液晶表示パネル26は、光軸に対して垂直配置されており、虚像V2は、側面視で略垂直に表示される。
【0027】
表示手段4は、奥行きのある表示表現が可能であり、フロントガラス5(投影部材)に表示光L1を投射して、車両前方の道路に概ね平行な虚像V1を表示できる。なお、奥行きのある表示表現が可能な表示手段として、両眼立体視による立体視が可能な表示器又は表示システムを用いることで奥行きのある虚像を表示しても良い。
【0028】
次に、表示手段4に表示する表示内容を制御部3で生成する方法について説明する。
【0029】
図7は、自車両73に対する虚像V1の表示像位置を表しており、表示手段4によって自車両73の前方に道路面と概ね平行に表示される。なお、虚像V1は対象の方向が示せる表現であればよく、例えば一つ以上の三角形や長手方向に伸びた長方形でも良い。更に、平面的な図形だけでなく、立体的な三角錐や円錐などでも良い。
【0030】
虚像V1は回転軸72(所定箇所)を中心に回転角76だけ回転して表示する。この回転角76は、測距センサ1によって検出された他車両74との相対距離に基づいて決定する。
【0031】
図8に相対距離81と回転角76との関係を図示する。横軸は相対距離81であり、縦軸は回転角76であり、特性曲線83によって相対距離81に対する回転角76の関係を表している。相対距離81が長いと回転角76は小さくなり、後方からの他車両74が接近するにつれて相対距離81が短くなると回転角76は大きくなる。この表示制御によって、後方からの他車両74が存在する位置を矢印の方向から直感的に認知することができる。
【0032】
次に、後方からの他車両74との相対速度と相対距離に基づく矢印表示の表示制御方法について説明する。
【0033】
矢印表示の表現方法は、緊急度のレベルに応じて変化させる。図9に示すように、緊急度のレベルは相対距離データと相対速度データの状況に応じて決定する。横軸は相対速度91であり、縦軸は相対距離92である。相対速度91と相対距離92にはそれぞれ相対速度閾値93と相対距離閾値94があり、この閾値93,94によって4つの領域95,96,97,98に分けられる。なお、この閾値はそれぞれ2つ以上であっても良く、領域が6つ以上に分けられても良い。
【0034】
測距センサ1から入力された相対速度データと相対距離データから緊急度レベルを決定し、各緊急度レベルに応じて矢印表示の表示方法を変化させる。例えば、緊急度レベルが危険レベルの領域95である場合、矢印の色を危険表示色にて表示する。緊急度レベルが注意レベルの領域96,97である場合、矢印の色を注意表示色にて表示する。緊急度レベルが準備レベルの領域98である場合、矢印の色を準備表示色にて表示する(図10参照)。なお、矢印の表示変化は色による変化の他に、矢印の太さ、矢印の頭部分の大きさや鋭さ、矢印の長さ、点滅の有無や点滅周期などの変化を用いても良い。この表示制御によって、注意すべき後方からの接近物の存在方向だけでなく、相対速度と相対距離からなる緊急度も短時間且つ正確に認知することができる。
【0035】
次に、後方の他車両74との相対速度の変化量が急激に変化した場合の表示制御方法について説明する。通常、相対距離データに基づいて回転角76を随時変化させるが、相対速度の変化量が一定の値を超えた時、図11に示すように過去の矢印表示を残像のように一定時間表示する。図11では、ある時間tにおける矢印表示を残像表示として薄い階調で表示し、時間tから一定時間経過したt+t0時間での矢印表示は本表示として通常の階調で表示している。ここでt0とは、残像表示と本表示との時間差を表わす。
【0036】
尚、時間tにおける矢印表示は薄い階調で表示するだけでなく、輪郭線のみで表示する方法や矢印の幅を狭くするなどしても良い。また、反対に時間t+t0の矢印表示を強調するような輪郭線を追加するなどしても良い。この表示制御によって、高速に接近する後方接近物の存在を、その存在位置と共に瞬間的に認知することができる。
【符号の説明】
【0037】
1 測距センサ(検出手段)
3 制御部(制御手段)
4 表示手段
5 フロントガラス(投影部材)
11 第一の液晶表示器(第一の表示器)
12 第二の液晶表示器(第二の表示器)
13 ハーフミラー13(透過反射板)
16 液晶表示パネル(第一の表示パネル)
26 液晶表示パネル(第二の表示パネル)
72 回転軸(所定箇所)
73 自車両
74 他車両
【特許請求の範囲】
【請求項1】
投影部材に表示光を投射して虚像を表示する表示手段と、自車両から他車両までの距離を検出して距離データを出力する検出手段と、前記距離データに基づいて前記他車両の位置を指し示す前記虚像を前記表示手段に表示させる制御手段と、を備えたことを特徴とする車両用ヘッドアップディスプレイ装置。
【請求項2】
前記制御手段は、前記距離データに基づいて、前記虚像が所定箇所を中心に回動するように、前記虚像を前記表示手段に表示させることを特徴とする請求項1に記載の車両用ヘッドアップディスプレイ装置。
【請求項3】
前記表示手段は、第一の表示光を発する第一の表示器と、第二の表示光を発する第二の表示器と、前記第一の表示光を透過させると共に前記第二の表示光を反射させる透過反射板と、を有することを特徴とする請求項1に記載の車両用ヘッドアップディスプレイ装置。
【請求項4】
前記第一の表示器は、前記透過反射板に対して第一の所定角度を有して配置された第一の表示パネルを有し、前記第二の表示器は、前記透過反射板に対して第二の所定角度を有して配置された第二の表示パネルを有することを特徴とする請求項3に記載の車両用ヘッドアップディスプレイ装置。
【請求項1】
投影部材に表示光を投射して虚像を表示する表示手段と、自車両から他車両までの距離を検出して距離データを出力する検出手段と、前記距離データに基づいて前記他車両の位置を指し示す前記虚像を前記表示手段に表示させる制御手段と、を備えたことを特徴とする車両用ヘッドアップディスプレイ装置。
【請求項2】
前記制御手段は、前記距離データに基づいて、前記虚像が所定箇所を中心に回動するように、前記虚像を前記表示手段に表示させることを特徴とする請求項1に記載の車両用ヘッドアップディスプレイ装置。
【請求項3】
前記表示手段は、第一の表示光を発する第一の表示器と、第二の表示光を発する第二の表示器と、前記第一の表示光を透過させると共に前記第二の表示光を反射させる透過反射板と、を有することを特徴とする請求項1に記載の車両用ヘッドアップディスプレイ装置。
【請求項4】
前記第一の表示器は、前記透過反射板に対して第一の所定角度を有して配置された第一の表示パネルを有し、前記第二の表示器は、前記透過反射板に対して第二の所定角度を有して配置された第二の表示パネルを有することを特徴とする請求項3に記載の車両用ヘッドアップディスプレイ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−47021(P2013−47021A)
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願番号】特願2011−185388(P2011−185388)
【出願日】平成23年8月28日(2011.8.28)
【出願人】(000231512)日本精機株式会社 (1,561)
【Fターム(参考)】
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願日】平成23年8月28日(2011.8.28)
【出願人】(000231512)日本精機株式会社 (1,561)
【Fターム(参考)】
[ Back to top ]