
車両用ベルト式無段変速機の制御装置
【課題】車両の駆動状態と被駆動状態との間の切り換えに際して可動回転体の相対回転を抑制することができる車両用ベルト式無段変速機の制御装置を提供する。
【解決手段】車両の駆動状態および被駆動状態の一方から他方への切換えが判定された場合には、伝動ベルト48に対する可動回転体46bからの挟圧力を一時的に上昇させる切換過渡時挟圧力制御手段128が備えられる。このため、車両の駆動状態と被駆動状態との間の切換時期では、可動回転体46bから伝動ベルト48を介して固定回転体46aへ向かう押圧力が一時的に高められるので、可動回転体46bが固定回転体46aに対して所定のガタ角度A分だけ相対回転しようとするときには上記押圧力の上昇による摩擦力すなわち制動力の増加によってその回転が抑制され、案内機構46gに大きな衝撃荷重が発生することが抑制されるとともに、その耐久性或いは運転性の低下も抑制される。
【解決手段】車両の駆動状態および被駆動状態の一方から他方への切換えが判定された場合には、伝動ベルト48に対する可動回転体46bからの挟圧力を一時的に上昇させる切換過渡時挟圧力制御手段128が備えられる。このため、車両の駆動状態と被駆動状態との間の切換時期では、可動回転体46bから伝動ベルト48を介して固定回転体46aへ向かう押圧力が一時的に高められるので、可動回転体46bが固定回転体46aに対して所定のガタ角度A分だけ相対回転しようとするときには上記押圧力の上昇による摩擦力すなわち制動力の増加によってその回転が抑制され、案内機構46gに大きな衝撃荷重が発生することが抑制されるとともに、その耐久性或いは運転性の低下も抑制される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はベルト式無段変速機の制御装置に係り、特に、車両の駆動状態が変化したときに可動回転体の固定回転体に対する急激な相対回転を低減する技術に関するものである。
【背景技術】
【0002】
入力軸および出力軸と、固定回転体および可動回転体とその可動回転体をその固定回転体に対して所定のガタ角度を超える相対回転が不能な状態で回転軸心方向に案内する案内機構とをそれぞれ有して上記入力軸および出力軸に設けられた溝幅が可変の一対の可変プーリと、それら一対の可変プーリに巻き掛けられた伝動ベルトと、前記可動回転体と前記固定回転体との間で前記伝動ベルトを挟圧するための挟圧力をその可動回転体に付与する挟圧力アクチュエータとを備える車両用ベルト式無段変速機が知られている。そして、このような車両用ベルト式無段変速機では、前記プーリの溝幅を変化させて前記ベルト式無段変速機の変速比を制御する変速制御装置および前記プーリが前記伝動ベルトを挟圧するベルト挟圧力を制御する挟圧力制御装置によって変速比やベルト挟圧力が逐次制御されるようになっているのが普通である。特許文献1に記載の車両はその一例であり、油圧により変速比やベルト挟圧力が制御されるようになっているとともに、変速比が変化する変速期間には、所定の安全率を確保できるように車両の駆動状態における安全率と被駆動状態における安全率とを異なる値とすることにより、車両の駆動状態および被駆動状態において伝動ベルトの滑りを回避しつつベルト挟圧力を可及的に低くして燃費等のエネルギー損失を低減するようになっている。
【特許文献1】特開2001−330126号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、このような従来の車両用ベルト式無段変速機の制御装置においては、走行中のアクセル踏込操作および戻し操作等に関連して、動力源(エンジン)側から動力伝達径路を介して駆動輪を駆動する駆動状態と動力源側が動力伝達経路を介して駆動輪により回転駆動される被駆動状態との間で切換られる場合がある。しかしながら、可変プーリでは、案内機構によって可動回転体が固定回転体に対して所定のガタ角度を超える相対回転が不能な状態で回転軸心方向に案内されるように構成されているので、上記駆動状態と被駆動状態との間の切換時期では、可動回転体が固定回転体に対して所定のガタ角度分だけ急激に相対回転させられた後に、上記案内機構に大きな衝撃荷重が発生し、その耐久性或いは運転性が損なわれる可能性があった。
【0004】
本発明は以上の事情を背景として為されたもので、その目的とするところは、車両の駆動状態と被駆動状態との間の切り換えに際して可動回転体の相対回転を抑制することができる車両用ベルト式無段変速機の制御装置を提供することにある。
【課題を解決するための手段】
【0005】
かかる目的を達成するための請求項1に係る発明の要旨とするところは、(a) 入力軸および出力軸と、固定回転体および可動回転体とその可動回転体をその固定回転体に対して所定のガタ角度を超える相対回転が不能な状態で回転軸心方向に案内する案内機構とをそれぞれ有して前記入力軸および出力軸に設けられた溝幅が可変の一対の可変プーリと、それら一対の可変プーリに巻き掛けられた伝動ベルトと、前記可動回転体が前記固定回転体との間で前記伝動ベルトを挟圧する挟圧力を付与する挟圧力アクチュエータとを備える車両用ベルト式無段変速機の制御装置であって、(b) 車両の駆動状態および被駆動状態の一方から他方への切換えを判定する切換判定手段と、(c) その切換判定手段によって前記車両の駆動状態および被駆動状態の一方から他方への切換えが判定された場合には、前記伝動ベルトに対する前記可動回転体からの挟圧力を一時的に上昇させる切換過渡時挟圧力制御手段とを、含むことを特徴とする。
【0006】
また、請求項2に係る発明の要旨とするところは、請求項1に係る発明において、(a) 前記ガタ角度は、前記可動回転体が前記固定回転体に対して1回転方向へ回転させられたときに相対回転不能となる第1角度から、その可動回転体が固定回転体に対して他の回転方向へ回転させられたときに相対回転不能となる第2角度までの角度範囲であり、(b) 前記切換過渡時挟圧力制御手段は、前記固定回転体および可動回転体が前記ガタ角度内にあるときに、前記伝動ベルトに対する前記可動回転体からの挟圧力を一時的に上昇させるものであることを特徴とする。
【0007】
また、請求項3に係る発明の要旨とするところは、請求項1または2に係る発明において、(a) ベルト滑りを防止する上で必要な最低限の理論必要ベルト挟圧力に所定の安全率を考慮して決定されたベルト挟圧力が得られるように前記挟圧力アクチュエータの出力を制御するベルト挟圧力制御手段を含み、(b) 前記切換過渡時挟圧力制御手段は、前記車両の駆動状態および被駆動状態の一方から他方への切換えの切換期間には、前記安全率をその車両の駆動状態または被駆動状態における安全率よりも高い値に一時的に変更するものであることを特徴とする。
【0008】
また、請求項4に係る発明の要旨とするところは、請求項1乃至3のいずれかの発明において、前記切換判定手段は、前記入力軸へ入力される入力トルクが正および負の一方から他方へ変化することに基づいて前記車両の駆動状態および被駆動状態の一方から他方への切換えを判定するものであることを特徴とする。
【0009】
また、請求項5に係る発明の要旨とするところは、請求項1乃至3のいずれかの発明において、前記切換判定手段は、前記入力軸へ入力される入力トルクが零またはその近傍の値に設定された判定値を通過することに基づいて前記車両の駆動状態および被駆動状態の一方から他方への切換えを判定するものであることを特徴とする。
【発明の効果】
【0010】
請求項1に係る発明の車両用ベルト式無段変速機の制御装置によれば、(a) 車両の駆動状態および被駆動状態の一方から他方への切換えを判定する切換判定手段と、(c) その切換判定手段によって前記車両の駆動状態および被駆動状態の一方から他方への切換えが判定された場合には、前記伝動ベルトに対する前記可動回転体からの挟圧力を一時的に上昇させる切換過渡時挟圧力制御手段とが、含まれることから、車両の駆動状態と被駆動状態との間の切換時期では、可動回転体から伝動ベルトを介して固定回転体へ向かう押圧力が一時的に高められるので、可動回転体が固定回転体に対して所定のガタ角度分だけ相対回転しようとするときには上記押圧力の上昇による摩擦力すなわち制動力の増加によってその回転が抑制される。したがって、上記車両の駆動状態と被駆動状態との間の切換時期において、上記案内機構に大きな衝撃荷重が発生することが抑制されるとともに、その耐久性或いは運転性の低下も抑制される。
【0011】
また、請求項2に係る発明の車両用ベルト式無段変速機の制御装置によれば、(a) 前記ガタ角度は、前記可動回転体が前記固定回転体に対して1回転方向へ回転させられたときに相対回転不能となる第1角度から、その可動回転体が固定回転体に対して他の回転方向へ回転させられたときに相対回転不能となる第2角度までの角度範囲であり、(b) 前記切換過渡時挟圧力制御手段は、前記固定回転体および可動回転体が前記ガタ角度内にあるときに、前記伝動ベルトに対する前記可動回転体からの挟圧力を一時的に上昇させるものであることから、そのガタ角度内にあるときの挟圧力の上昇による摩擦力すなわち制動力の増加によって、可動回転体が固定回転体に対して所定のガタ角度分だけ相対回転しようときのその回転が緩やかに抑制される。
【0012】
また、請求項3に係る発明の車両用ベルト式無段変速機の制御装置によれば、(a) ベルト滑りを防止する上で必要な最低限の理論必要ベルト挟圧力に所定の安全率を考慮して決定されたベルト挟圧力が得られるように前記挟圧力アクチュエータの出力を制御するベルト挟圧力制御手段を含み、(b) 前記切換過渡時挟圧力制御手段は、前記車両の駆動状態および被駆動状態の一方から他方への切換えの切換期間には、前記安全率をその車両の駆動状態または被駆動状態における安全率よりも高い値に一時的に変更するものであることから、その安全率の高い値への変更によって挟圧力が上昇して摩擦力すなわち制動力が増加させられるので、可動回転体が固定回転体に対して所定のガタ角度分だけ相対回転しようとするときに制動力が大きくされてその回転が緩やかに抑制される。
【0013】
また、請求項4に係る発明の車両用ベルト式無段変速機の制御装置によれば、前記切換判定手段は、前記入力軸へ入力される入力トルクが正および負の一方から他方へ変化することに基づいて前記車両の駆動状態および被駆動状態の一方から他方への切換えを判定するものであることから、遅れなく車両の駆動状態および被駆動状態の一方から他方への切換が正確に判定される。
【0014】
また、請求項5に係る発明の車両用ベルト式無段変速機の制御装置によれば、前記切換判定手段は、前記入力軸へ入力される入力トルクが零またはその近傍の値に設定された判定値を通過することに基づいて前記車両の駆動状態および被駆動状態の一方から他方への切換えを判定するものであることから、車両の駆動状態および被駆動状態の一方から他方への切換が容易に判定される。
【0015】
ここで、好適には、前記車両用ベルト式無段変速機は、動力源と駆動輪との間の動力伝達経路に配設される。動力源としては、燃料の燃焼によって駆動力を発生するガソリンエンジンやディーゼルエンジンなどの内燃機関、或いは電気エネルギーで作動する電動モータなど、種々の動力源を採用できる。内燃機関および電動モータの両方を走行用の動力源として備えていても良い。
【0016】
また、好適には、ベルト式無段変速機の変速制御やベルト挟圧力の制御に用いられるアクチュエータは、例えば油圧シリンダによる油圧制御や電気モータによる電気制御で行うように構成され、変速比を制御する変速制御装置およびベルト挟圧力を制御する挟圧力制御装置は、油圧を制御する電磁開閉弁やリニアソレノイド弁などを含んで構成される。変速制御は、一対のプーリの何れか一方の油圧制御によって行われ、挟圧力制御は他方のプーリの油圧制御によって行われるが、一般には、変速制御は動力源側に位置する入力側可変プーリが用いられ、ベルト挟圧力の制御は駆動輪側に位置する出力側可変プーリが用いられる。その場合に、被駆動状態では入力側可変プーリの油圧がベルト挟圧に必要な油圧になるように出力側可変プーリの油圧を制御する必要があるため、例えば予め定められた推力比を用いて出力側可変プーリの油圧制御を行うことが望ましいが、推力比を高い精度で設定することは困難であるため、推力比のばらつきを考慮した安全率を用いることが望ましい。
【0017】
また、好適には、前記変速制御装置は、例えば目標変速比を求めて実際の変速比がその目標変速比になるように制御したり、目標入力軸回転速度を求めて実際の入力軸回転速度がその目標入力軸回転速度になるようにフィードバック制御したりするなど、種々の態様を採用できる。目標入力軸回転速度は目標変速比に対応し、必ずしも目標変速比そのものを求める必要はない。
【0018】
上記目標変速比、目標入力軸回転速度は、予め記憶されたするマップ(関係)や演算式から、例えばアクセル操作量などの運転者の出力要求量および車速(出力軸回転速度に対応)などの車両運転状態に基づいて逐次決定される。或いは、予め記憶された第1の関係から実際のアクセル操作量および車速に基づいて要求駆動力が決定された後、予め記憶された第2の関係から上記要求駆動力に基づいて上記目標変速比、目標入力軸回転速度が決定される。なお、常に自動的に変速比が制御される必要はなく、所定車速以上の走行中など一定の条件下で運転者が手動操作で任意に変速比を変更できるようになっていても良い。
【0019】
挟圧力制御装置は挟圧力制御手段を含むものであり、挟圧力制御手段は、例えば(a) ベルト式無段変速機に入力される推定入力トルクを算出する推定入力トルク算出手段と、(b) その推定入力トルクに基づいてベルト滑りを防止する上で必要な最低限の理論必要ベルト挟圧力を算出する理論挟圧力算出手段と、(c) ベルト滑りに関与する物理量の変化特性やばらつきに応じて安全率を算出する安全率算出手段と、(d) 理論必要ベルト挟圧力を基準にして安全率を加味して最終の必要ベルト挟圧力を算出する必要ベルト挟圧力算出手段と、を有して構成される。油圧制御でベルト挟圧力を制御する場合、上記理論挟圧力算出手段は、例えば理論必要油圧を算出する理論必要油圧算出手段にて構成され、必要ベルト挟圧力算出手段は、例えば必要油圧を算出する必要油圧算出手段にて構成される。
【0020】
上記推定入力トルク算出手段、理論挟圧力算出手段、および安全率算出手段は、必要に応じて駆動状態か被駆動状態かによって異なる演算処理を行うように構成される。例えば、推定入力トルク算出手段は、駆動状態では動力源フリクショントルクやオイルポンプ駆動トルク、エアコン駆動トルク、オルタネータ駆動トルクなどを減算する一方、被駆動状態ではそれ等のトルクを加算する。理論挟圧力算出手段は、例えば駆動状態で被駆動側のプーリの油圧でベルト挟圧力を制御ようにエンジン負荷および変速比に基づいて理論必要ベルト挟圧力(理論必要油圧)を算出し、被駆動状態ではさらに前記推力比を考慮して理論必要ベルト挟圧力(理論必要油圧)を算出する。安全率算出手段は、例えば駆動状態では動力源のトルク変動を安全率に反映させるが、被駆動状態ではそのトルク変動を安全率に反映させる必要はなく、被駆動状態では推力比のばらつきを安全率に反映させるが、推力比が必要ない駆動状態ではそのばらつきを安全率に反映させる必要はない。
【0021】
また、前記案内機構は、可動回転体を固定回転体に対して所定のガタ角度を超える相対回転が不能な状態で回転軸心方向に案内するものであり、たとえば、固定回転体或いはそれが固設された回転軸(出力軸)の外周面に周方向に一定の間隔を隔てて軸心方向に形成された複数本のスプライン歯と可動回転体の内周面に周方向に一定の間隔を隔てて軸心方向に形成された複数本のスプライン歯とが互いにかみ合った状態で嵌合されるスプライン嵌合機構から好適に構成される。しかし、案内機構は、固定回転体或いは回転軸の外周面に固定された軸心方向のキーと可動回転体の内周面にそのキーが嵌め入れられるように形成された軸心方向のキー溝とから構成されてもよいし、固定回転体或いは回転軸の外周面に周方向に一定の間隔を隔てて軸心方向に形成された複数本の内周側ボール溝と、可動回転体の内周面に周方向に一定の間隔を隔てて軸心方向に形成された複数本のと軸心方向に形成された外周側ボール溝と、それら内周側ボール溝および外周側ボール溝の間の空間にボールが嵌め入れられたボールスプライン機構から構成されてもよい。
【0022】
また、好適には、切換判定手段は、前記車両の駆動状態および被駆動状態の一方から他方への切換えを、アクセル操作量θACC が略0のアクセルOFF時にONになるように構成されたアイドル接点(スイッチ)がONからOFFへ、或いはOFFからONへ変化したことに基づいて判定する。しかし、切換判定手段は、推定エンジントルクTE、推定入力トルクTINT、トルクセンサにより検出される実際の入力軸トルクが零付近に設定された判定値を通過したことに基づいて、車両の駆動状態および被駆動状態の一方から他方への切換えを判定してもよい。上記切換判定は、トルク値付近に設定された判定値を推定エンジントルクTE、推定入力トルクTINT、実際の入力軸トルクが通過したことに基づいて実行されるが、応答時間を考慮して、上記よりも先立って判定できるようにトルク値が零よりも所定値だけずらされてもよい。
【0023】
また、好適には、切換判定手段は、エンジンとベルト式無段変速機の入力軸との間に設けられたダンパのねじれ、すなわちそのねじれにより許容されるエンジンのクランク軸と入力軸と相対回転角度が予め零値付近に設定された判定値を通過することに基づいて、車両の駆動状態および被駆動状態の一方から他方への切換えを判定してもよい。
【0024】
また、好適には、前記切換判定手段は、車両の駆動状態から被駆動状態への切換および被駆動状態から駆動状態への切換の一方のみを判定するものであってもよいし、両方を判定するものであってもよい。切換過渡時挟圧力制御手段は、車両の駆動状態から被駆動状態への切換および被駆動状態から駆動状態への切換の一方の切換えが判定された場合のみに伝動ベルトに対する前記可動回転体からの挟圧力を一時的に上昇させるものであってもよいし、両方の切換が判定された場合にそれぞれ伝動ベルトに対する前記可動回転体からの挟圧力を一時的に上昇させるものであってもよい。
【0025】
また、前記切換過渡時挟圧力制御手段は、固定回転体および可動回転体の相対回転位置がそれらのガタ角度内にあるときに可動回転体からの挟圧力を一時的に上昇させるが、そのガタ角度範囲内での相対回転期間の全部において挟圧力を一時的に上昇させてもよいが、そのガタ角度範囲の一部の角度すなわちガタ角度内にある時間帯のうちの一部の時間帯特に後半の時間帯において挟圧力を一時的に上昇させるものでもよい。
【発明を実施するための最良の形態】
【0026】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。
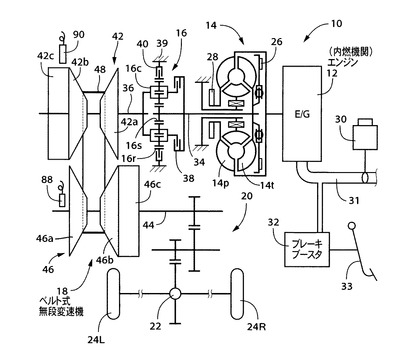
図1は、本発明が適用された車両用駆動装置10の骨子図である。この車両用駆動装置10は横置き型であり、FF(フロントエンジン・フロントドライブ)型車両に好適に採用されるものであり、走行用の動力源として用いられる内燃機関としてエンジン12を備えている。エンジン12の出力は、トルクコンバータ14から前後進切換装置16、ベルト式無段変速機(CVT)18、減速歯車20を介して差動歯車装置22に伝達され、左右の駆動輪24L、24Rへ分配される。
【0027】
エンジン12は、吸入空気量を電気的に調整する電気式スロットル弁30を備えており、運転者の出力要求量を表す図示しないアクセルペダルのアクセル操作量θACC などに応じてエンジンECU(電子制御ユニット)110(図8参照)により電気式スロットル弁30の開閉制御や燃料噴射制御等のエンジン出力制御が行われることにより、エンジン12の出力が増減制御される。また、エンジン12の吸気管31にはブレーキブースタ32が接続され、吸気管31内の負圧によってブレーキペダル33の踏込み操作力(ブレーキ力)を助勢するようになっている。
【0028】
トルクコンバータ14は、エンジン12のクランク軸に連結されたポンプ翼車14p、およびタービン軸34を介して前後進切換装置16に連結されたタービン翼車14tを備えており、流体を介して動力伝達を行うようになっている。また、それ等のポンプ翼車14pおよびタービン翼車14tの間にはロックアップクラッチ26が設けられ、それ等を一体的に連結して一体回転させることができるようになっている。上記ポンプ翼車14pには、ベルト式無段変速機18を変速制御したりベルト挟圧力を発生させたり、或いは各部に潤滑油を供給したりするための油圧を発生する機械式のオイルポンプ28が設けられている。
【0029】
前後進切換装置16は、ダブルピニオン型の遊星歯車装置にて構成されており、トルクコンバータ14のタービン軸34はサンギヤ16sに連結され、ベルト式無段変速機18の入力軸36はキャリア16cに連結されている。そして、キャリア16cとサンギヤ16sとの間に配設された直結クラッチ38が係合させられると、前後進切換装置16は一体回転させられてタービン軸34が入力軸36に直結され、前進方向の駆動力が駆動輪24R、24Lに伝達される。リングギヤ16rと非回転部材であるハウジング39との間に配設された反力ブレーキ40が係合させられるとともに上記直結クラッチ38が開放されると、入力軸36はタービン軸34に対して逆回転させられ、後進方向の駆動力が駆動輪24R、24Lに伝達される。また、直結クラッチ38および反力ブレーキ40が共に開放されると、エンジン12とベルト式無段変速機18との間の動力伝達が遮断される。直結クラッチ38および反力ブレーキ40は何れも油圧式摩擦係合装置である。
【0030】
ベルト式無段変速機18は、互いに平行な状態で回転可能に支持された入力軸36および出力軸44と、その入力軸36に設けられたV溝幅が可変の入力側可変プーリ42と、出力軸44に設けられたV溝幅が可変の出力側可変プーリ46と、それ等の可変プーリ42および46に巻き掛けられた伝動ベルト48とを備えており、可変プーリ42および46と伝動ベルト48との間の摩擦力を介して動力伝達が行われる。可変プーリ42および46は、V溝幅を変更するためのアクチュエータとして機能する油圧シリンダ42cおよび46cを備えて構成されており、入力側可変プーリ42の油圧シリンダ42cの油圧が変速制御回路50(図7参照)によって制御されることにより、両可変プーリ42および46のV溝幅が変化して伝動ベルト48の掛かり径(有効径)が変更され、変速比γ(=入力軸回転速度NIN/出力軸回転速度NOUT)が連続的に変化させられるようになっている。
【0031】
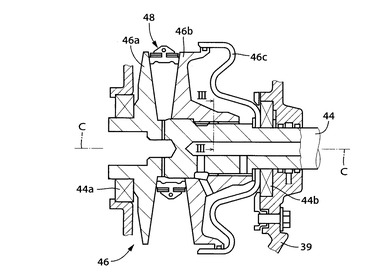
上記入力側可変プーリ42および出力側可変プーリ46は、入力軸36および出力軸44に固設された固定回転体42aおよび46a、それら固定回転体42aおよび46aとの間にV溝を形成する可動回転体42bおよび46bと、それら可動回転体42bおよび46bを固定回転体42aおよび46aに対して相対回転不能且つ回転軸心Cの方向に接近離隔可能に案内する案内機構42gおよび46gとを備えている。案内機構42gおよび46gは互いに同様に構成されているので、図2および図3では案内機構46gが代表して示されている。
【0032】
図2は出力側可変プーリ46を拡大して詳細に説明する図であり、図3はその図2のIII-III 視断面図である。出力軸44はベアリング44aおよび44bを介してハウジング39により回転可能に支持されており、その出力軸44には固定回転体46aが一体に設けられている。出力軸44の外周面と可動回転体46bの内周面には、互いに噛み合うスプライン歯44sおよび46sが周方向に多数設けられており、可動回転体46bが出力軸44或いは固定回転体46aに対して相対回転不能且つ回転軸心Cの方向の移動可能に設けられている。本実施例では、上記スプライン歯44sおよび46sにより案内機構46gが構成されている。油圧シリンダ46c内には可動回転体46bの外周端が摺動可能に嵌め入れられて油室が形成されている。
【0033】
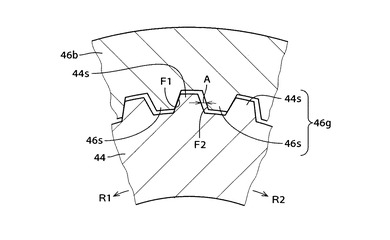
ところで、スプライン歯44sおよび46sの間には摺動を円滑にすることなどのための加工公差や摺動摩耗などにより、上記可動回転体46bと出力軸44との間には所定の大きさの周方向のガタが存在し、そのガタの大きさを示すガタ角度寸法A(mm)或いはガタ角度A(°)は図3のように示される。すなわち、このガタ角度Aは、可動回転体46bが固定回転体46aに対して1回転方向R1へ回転させられたときにスプライン歯44sがスプライン歯46sの一方の歯面F1に当接して相対回転不能となる第1角度(図3に示される第1状態)から、その可動回転体46bが固定回転体46aに対して他の回転方向R2へ回転させられたときにスプライン歯44sがスプライン歯46sの他方の歯面F2に当接して相対回転不能となる第2角度(第2状態)までの角度範囲である。このため、可動回転体46bは、出力軸44或いは固定回転体46aに対して相対回転不能に嵌合されているとは言っても、実際には、その所定のガタ角度Aを超える相対回転が不能な状態で出力軸44或いは固定回転体46aに嵌合されている。したがって、車両の動力伝達方向が切換られた時には、ベルト挟圧力が維持されていても伝動ベルト48は固定回転体46aとの間の摩擦だけとなるので、可動回転体46bが上記ガタ角度Aだけ急激に移動させられてスプライン歯44sがスプライン歯46sの一方の歯面F1から反対側の他方の歯面F2に突き当たるので、構造的には比較的大きな衝撃荷重が発生する可能性が存在していた。
【0034】
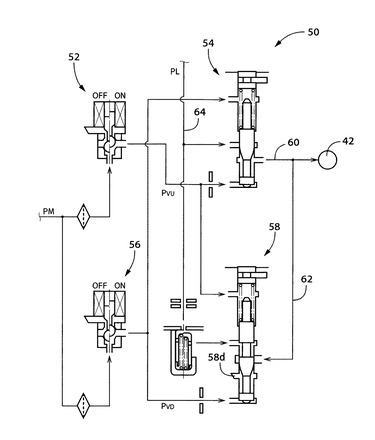
図4は、前記変速制御回路50の一例であり、変速比γを小さくするアップシフト用の電磁開閉弁52および流量制御弁54と、変速比γを大きくするダウンシフト用の電磁開閉弁56および流量制御弁58とを備えている。そして、アップシフト用の電磁開閉弁52がCVTコントローラ80(図6参照)によりデューティ制御されると、モジュレータ圧PMを減圧した所定の制御圧PVUが流量制御弁54に出力され、その制御圧PVUに対応して調圧されたライン圧PLが供給路60から入力側可変プーリ42の油圧シリンダに供給されることにより、そのV溝幅が狭くなって変速比γが小さくなる。また、ダウンシフト用の電磁開閉弁56がCVTコントローラ80によりデューティ制御されると、モジュレータ圧PMを減圧した所定の制御圧PVDが流量制御弁58に出力され、その制御圧PVDに対応してドレーンポート58dが開かれることにより、入力側可変プーリ42内の作動油が排出路62から所定の流量でドレーンされてV溝幅が広くなり、変速比γが大きくなる。なお、変速比γが略一定で入力側可変プーリ42に対する作動油の供給が必要ない場合でも、油漏れによる変速比変化を防止するため、流量制御弁54は所定の流通断面積でライン油路64と供給路60とを連通させ、所定の油圧を作用させるようになっている。
【0035】
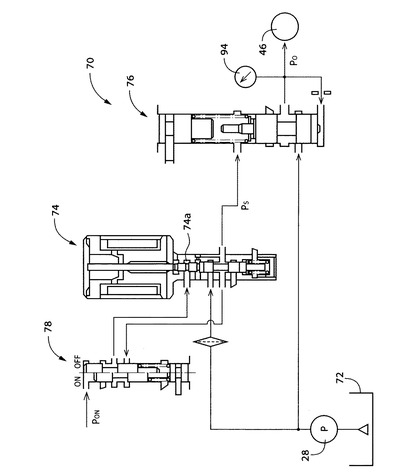
また、出力側可変プーリ46の油圧シリンダ46c内の油圧は、伝動ベルト48が滑りを生じないように、挟圧力制御回路70(図6参照)により調圧制御される。図5は、挟圧力制御回路70の一例であり、前記オイルポンプ28によりオイルタンク72から汲み上げられた作動油は、リニアソレノイド弁74に供給されるとともに、挟圧力制御弁76を経て出力側可変プーリ46の油圧シリンダに供給される。リニアソレノイド弁74は、CVTコントローラ80によって励磁電流が連続的に制御されることにより、オイルポンプ28から供給された作動油の油圧を連続的に調圧して、制御圧PS を挟圧力制御弁76に出力するもので、挟圧力制御弁76から出力側可変プーリ46の油圧シリンダに供給される作動油の油圧PO は、制御圧PS が高くなるに従って上昇させられ、それに伴ってベルト挟圧力すなわち可変プーリ42および46と伝動ベルト48との間の摩擦力が増大させられる。
【0036】
リニアソレノイド弁74にはまた、カットバック弁78のON時に制御圧PS がフィードバック室74aに供給される一方、カットバック弁78のOFF時には、その制御圧PS の供給が遮断されてフィードバック室74aが大気に開放されるようになっており、カットバック弁78のON時にはOFF時よりも制御圧PS 、更には油圧PO の特性が低圧側へ切り換えられる。カットバック弁78は、前記トルクコンバータ14のロックアップクラッチ26のON(係合)時に、図示しない電磁弁から信号圧PONが供給されることによりONに切り換えられるようになっている。
【0037】
図6は、本実施例の電気的構成の要部を示している。図6において、CVTコントローラ80は、所謂マイクロコンピュータを含んで構成されており、RAMの一時記憶機能を利用しつつROMに予め記憶されたプログラムに従ってCPUが信号処理を行うことにより、上記ベルト式無段変速機18の変速制御や挟圧力制御を行う電子制御装置である。CVTコントローラ80には、シフトポジションセンサ82、アクセル操作量センサ84、エンジン回転速度センサ86、出力軸回転速度センサ88、入力軸回転速度センサ90、タービン回転速度センサ92、油温センサ94、油圧センサ96などから、それぞれシフトレバー98(図7参照)のシフトポジションSFTP、アクセルペダルの操作量θACC 、エンジン回転速度NE、出力軸回転速度NOUT(車速Vに対応)、入力軸回転速度NIN、タービン回転速度NT、ベルト式無段変速機18の油圧回路の油温TO 、出力側可変プーリ46の油圧PO などを表す信号が供給されるようになっている。
【0038】
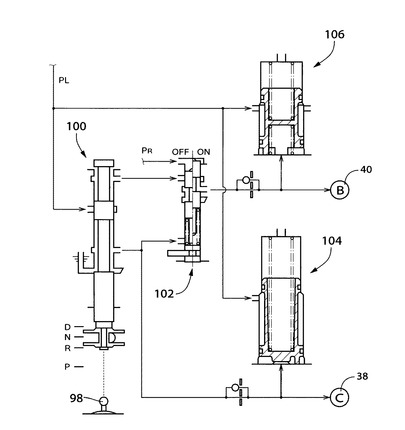
シフトレバー98は運転者によって選択操作される手動操作装置であり、シフトポジションSFTPとして前進走行用のDレンジ、後進走行用のRレンジ、動力伝達を遮断するNレンジ、駐車用のPレンジを備えている。そして、そのシフトレバー98には図7に示すマニュアルシフトバルブ100がケーブル等を介して接続されており、そのマニュアルシフトバルブ100により油路が切り換えられることにより、Dレンジでは前記前後進切換装置16の反力ブレーキ40が開放されるとともに直結クラッチ38が係合させられ、Rレンジでは直結クラッチ38が開放されるとともに反力ブレーキ40が係合させられ、NレンジおよびPレンジでは直結クラッチ38および反力ブレーキ40が共に開放される。反力ブレーキ40には、マニュアルシフトバルブ100からリバースコントロールバルブ102を経て作動油が供給されるようになっており、リバースコントロールバルブ102は、シフトレバー98がRレンジへ操作され時だけ信号圧PR の供給が停止されてON状態になり、反力ブレーキ40への作動油の供給が許容されるようになっている。また、直結クラッチ38および反力ブレーキ40には、それぞれアキュムレータ104、106が接続され、N→DシフトやN→Rシフトでそれ等の直結クラッチ38や反力ブレーキ40が係合させられて駆動輪24L、24Rへ駆動力が伝達される際のシフトショックが軽減されるようになっている。なお、Pレンジでは、図示しないメカニカルパーキングロック機構により駆動輪24R、24Lの回転が機械的に阻止されるようになっている。
【0039】
前記CVTコントローラ80にはまたエンジンECU(電子制御ユニット)110が接続され、ベルト式無段変速機18の変速制御やベルト挟圧力の制御に必要な各種の情報、例えばエンジン12の吸入空気量Q、エンジン水温THW、オルタネータの電気負荷ELS、アクセルOFFのコースト走行時にエンジン12に対する燃料供給を停止するフューエルカットの有無、減筒運転の有無、エアコンのON・OFF、ロックアップクラッチ26のON・OFF、などに関する信号が供給されるようになっている。
【0040】
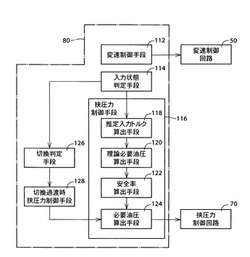
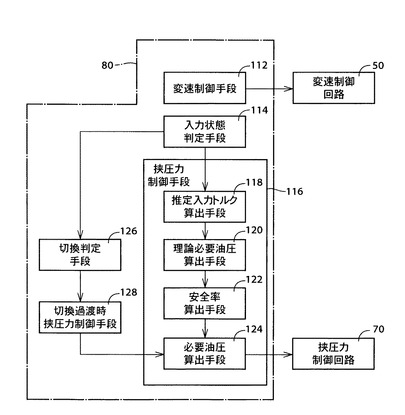
図8は、CVTコントローラ80の制御機能の要部を説明する機能ブロック線図である。図8に示すように、CVTコントローラ80には、変速制御手段112、入力状態判断手段114、挟圧力制御手段116を備えており、挟圧力制御手段116は更に推定入力トルク算出手段118、理論必要油圧算出手段120、安全率算出手段122、必要油圧算出手段124、切換判定手段126、切換過渡時挟圧力制御手段128が備えられている。
【0041】
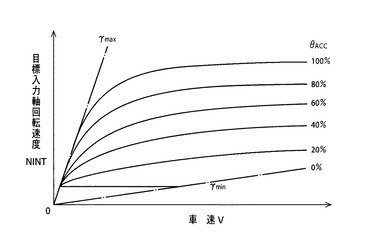
変速制御手段112は、たとえば図9に示すように運転者の出力要求量を表すアクセル操作量θACC および車速V(出力軸回転速度NOUTに対応)をパラメータとして予め定められ且つ記憶された変速マップから実際のアクセル操作量θACC および車速Vに基づいて目標入力軸回転速度NINTを算出し、実際の入力軸回転速度NINが目標入力軸回転速度NINTと一致するように、それ等の偏差に応じてベルト式無段変速機18の変速制御、具体的には変速制御回路50の電磁開閉弁52、56をフィードバック制御して、入力側可変プーリ42の油圧シリンダに対する作動油の供給、排出を制御する。図9のマップは変速条件に相当するもので、車速Vが小さくアクセル操作量θACC が大きい程大きな変速比γになる目標入力軸回転速度NINTが設定されるようになっている。また、車速Vは出力軸回転速度NOUTに対応するため、入力軸回転速度NINの目標値である目標入力軸回転速度NINTは目標変速比に対応し、ベルト式無段変速機18の最小変速比γmin と最大変速比γmax の範囲内で定められている。上記変速マップは、CVTコントローラ80のマップ記憶装置(ROMなど)130に予め記憶されている。
【0042】
入力状態判断手段114および挟圧力制御手段116は、エンジン12側から駆動輪24L、24R側へ動力が伝達される駆動状態か、駆動輪24L、24R側からエンジン12側へ動力が伝達される被駆動状態(エンジンブレーキ状態)か、断続装置としての直結クラッチ38および反力ブレーキ40が共に開放されている遮断状態かに場合分けしてベルト挟圧力すなわち出力側可変プーリ46の油圧PO を制御するためのものである。
【0043】
入力状態判断手段114は、シフトポジションSFTPがNまたはPレンジか否か、すなわち直結クラッチ38および反力ブレーキ40が共に開放された遮断状態か否かを判断する。NまたはPレンジでない場合はアイドル接点がONか否かを判断する。アイドル接点は前記アクセル操作量センサ84に内蔵されており、アクセル操作量θACC が略0のアクセルOFF時にONになるように構成されているので、アイドル接点がOFFの場合は通常は駆動状態であり、アイドル接点がONの場合は通常は被駆動状態であるが、入力状態判断手段114は更にフューエルカットの有無を判断する。
【0044】
挟圧力制御手段116は、NまたはPレンジの場合は遮断状態の挟圧力制御を実行し、アイドル接点がOFFの場合は駆動状態の挟圧力制御を実行し、アイドル接点がONであり且つフューエルカット時にはフューエルカットON被駆動状態の挟圧力制御を実行し、フューエルカットが実施されていない場合はフューエルカットOFF被駆動状態の挟圧力制御を実行する。
【0045】
上記挟圧力制御手段116に含まれる推定入力トルク算出手段118は、たとえば吸入空気量Qまたはアクセル操作量θACC およびエンジン回転速度NEに基づいて、予め設定されたマップや演算式に従って推定エンジントルクTEを算出する。但し、被駆動状態では正確に算出できないため、エンジン12のポンプ作用による推定エンジントルクTEをフューエルカットの有無などに応じて予めマップなどで設定しておく。次いで、トルクコンバータ14の速度比e(=出力回転速度/入力回転速度)に基づいて、予め設定されたマップや演算式に従ってトルク比を算出し、上記推定エンジントルクTEに掛算するとともに、必要に応じて補機分を補正することにより、推定入力トルクTINTを算出する。
【0046】
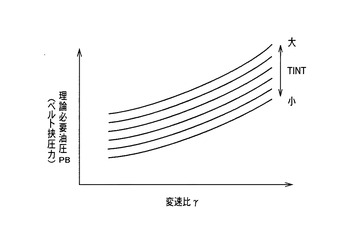
上記挟圧力制御手段116に含まれる理論必要油圧算出手段120は、上記推定入力トルクTINTに基づいて理論必要油圧PBを算出する。この理論必要油圧PBは、理論必要ベルト挟圧力に対応するものであってベルト滑りを防止できる最低必要油圧である。駆動状態の場合は、入力側可変プーリ42のベルト掛かり径Rを用い、たとえば次式(1) に従って基本的に求める。Kはプーリ面積や摩擦係数などのハード諸元、オイル密度などによって定まる係数で、ベルト掛かり径Rは変速比γから求めることができる。図10は、推定入力トルクTINT、変速比γ、および理論必要油圧PBの関係を示す概略図である。被駆動状態の場合は、入力側可変プーリ42側のベルト挟圧力を適切に制御する必要があるため、出力側可変プーリ46と入力側可変プーリ42との推力比αを予め定められたマップや演算式から求め、入力側可変プーリ42側で所定のベルト挟圧力が得られる出力側可変プーリ46の理論必要油圧PBを次式(2) に従って算出する。推力比αを求めるマップや演算式は、予め実験などにより変速比γをパラメータとして設定されており、前記マップ記憶装置130に記憶されている。
【0047】
PB=K×(TINT/R) ・・・(1)
PB=K×α×(TINT/R) ・・・(2)
【0048】
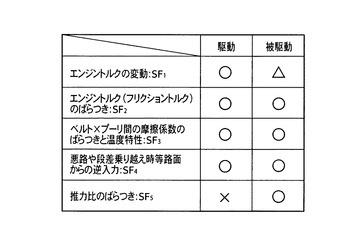
上記挟圧力制御手段116に含まれる安全率算出手段122は、安全率SFを例えば図11に示すように駆動状態か被駆動状態かによってそれぞれ算出する。安全率SFは、ベルト滑りに関与する物理量の変化特性やばらつきに拘らずベルト滑りが生じないように、前記理論必要油圧PBに掛算されるもので、1.0を基準にして所定の安全係数をそれぞれ加算して求める。具体的には、駆動状態の場合は、エンジントルクの変動に関する安全係数SF1 、エンジン12のフリクショントルクのばらつきに関する安全係数SF2 、伝動ベルト48と可変プーリ42、46との間の摩擦係数のばらつきと温度特性に関する安全係数SF3 、悪路や段差乗り越え時等の路面からの逆入力に関する安全係数SF4 、をそれぞれ1.0に加算して安全率SFを求める。また、被駆動状態の場合は、前記推力比αのばらつきに関する安全係数SF5 を加算して安全率SFを算出する。図11の「○」は安全率SFに反映されることを意味し、「×」は安全率SFに反映されないことを意味し、「△」は、場合によって反映されることを意味する。
【0049】
上記挟圧力制御手段116に含まれる必要油圧算出手段124は、理論必要油圧PBに安全率SFを掛算して、必要油圧PBTを算出し、出力側可変プーリ46の油圧PO が必要油圧PBTになるように、挟圧力制御回路70のリニアソレノイド弁74に対する励磁電流を制御する。
【0050】
切換判定手段126は、車両の前進走行中においてエンジン12からタービン軸34或いはベルト式無段変速機18の入力軸36へ入力される実際の入力トルクTIN或いは前記推定入力トルクTINTが正および負の一方から他方へ変化することに基づいて、たとえばアイドル接点がOFFおよびONの一方から他方へ変化したことに基づいて、車両の駆動状態および被駆動状態の一方から他方への切換えを判定する。
【0051】
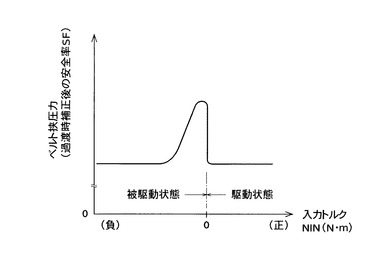
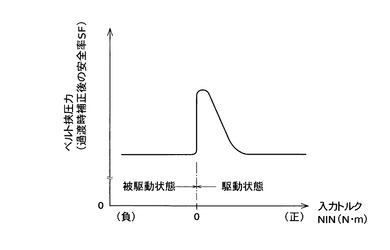
切換過渡時挟圧力制御手段128は、上記切換判定手段126によって車両の駆動状態および被駆動状態の一方から他方への切換えが判定された場合には、挟圧力制御手段116に伝動ベルト48に対する可動回転体46bからの挟圧力を所定値だけ一時的に上昇させる。この挟圧力の一時的な上昇は、必要油圧算出手段124において用いられる安全率SFを、上記挟圧力の上昇分に対応する過渡補正値ΔSFを加えたり過渡補正係数K(>1)を乗算したりして、たとえば図12に示すように、通常の駆動状態または被駆動状態における安全率よりも高い値に過渡時補正後の安全率SFに変更することにより実現される。上記挟圧力の上昇分は、固定回転体46aおよび可動回転体46bがガタ角度A内にあるときに発生させられる。また、上記挟圧力の上昇分は、固定回転体46aに対して相対回転可能なガタ角度A内の可動回転体46bに充分な大きさの回転方向の制動力を与えることができる値に設定される。図12は駆動状態から被駆動状態への切換時における挟圧力(過渡補正後の安全率SF)の変化タイミングおよび変化量を示し、図14は被駆動状態から駆動状態への切換時における挟圧力(過渡補正後の安全率SF)の変化タイミングおよび変化量を示している。
【0052】
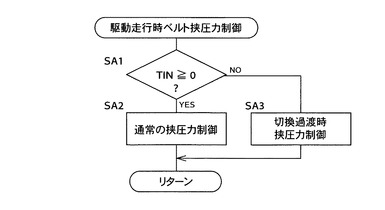
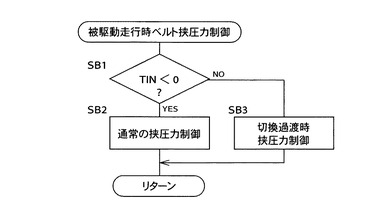
図13および図15は前記CVTコントローラ80の制御作動の要部を説明するフローチャートであり、図13は車両が駆動走行状態において実行されるベルト挟圧力制御を、図15は車両が被駆動走行状態において実行されるベルト挟圧力制御を示している。
【0053】
図13において、前記切換判定手段126に対応するステップ(以下、ステップを省略する)SA1では、入力トルクTINが判定値(零)以上の値であるか否かすなわち車両の走行が駆動状態であるか否かが判断される。このSA1の判断が肯定される場合は、車両の駆動状態であるので、前記挟圧力制御手段116に対応するSA2において、通常のベルト挟圧力制御すなわち正駆動走行状態における前述のベルト挟圧力制御が実行される。しかし、SA1の判断が否定される場合は、車両が駆動状態から被駆動状態に切換られたときであるので、前記切換過渡時挟圧力制御手段128に対応するSA3において、図12に示すように、ベルト挟圧力(過渡補正後の安全率SF)が一時的に増加させられる。
【0054】
図15において、前記切換判定手段126に対応するステップSB1では、入力トルクTINが判定値(零)未満の値であるか否かすなわち車両の走行が被駆動状態であるか否かが判断される。このSB1の判断が否定される場合は、車両の被駆動状態であるので、前記挟圧力制御手段116に対応するSB2において、通常のベルト挟圧力制御すなわち被駆動走行状態における前述のベルト挟圧力制御が実行される。しかし、SB1の判断が肯定される場合は、車両が被駆動状態から駆動状態に切換られたときであるので、前記切換過渡時挟圧力制御手段128に対応するSB3において、図14に示すように、ベルト挟圧力(過渡補正後の安全率SF)が一時的に増加させられる。
【0055】
上記のように、車両が駆動状態から被駆動状態に切換られたとき或いは車両が被駆動状態から駆動状態に切換られたときは、その切換に伴って、前記ガタ角度Aに相当する移動ストロークで可動回転体46bが出力軸44に対して相対回転するが、図12或いは図14に示すように駆動方向の切換開始時に所定値だけ急速に上昇させられてから駆動方向の切換わり後に徐々に通常値に向かって緩やかに復帰させられることにより、ベルト挟圧力(過渡補正後の安全率SF)が一時的に増加させられるので、可動回転体46bと共に移動する伝動ベルト48と固定回転体46aとの間の摩擦が大きくされて制動力が大きくされる。これにより、上記の可動回転体46bの固定回転体46aに対する相対移動(回転)が緩やかとされるので、上記移動ストロークの終了時の衝撃の発生が緩和される。
【0056】
上述のように、本実施例の車両用ベルト式無段変速機18の制御装置(CVTコントローラ80)によれば、(a) 車両の駆動状態および被駆動状態の一方から他方への切換えを判定する切換判定手段126と、(c) その切換判定手段126によって車両の駆動状態および被駆動状態の一方から他方への切換えが判定された場合には、伝動ベルト48に対する可動回転体46bからの挟圧力を一時的に上昇させる切換過渡時挟圧力制御手段128とが、含まれることから、車両の駆動状態と被駆動状態との間の切換時期では、可動回転体46bから伝動ベルト48を介して固定回転体46aへ向かう押圧力が一時的に高められるので、可動回転体46bが固定回転体46aに対して所定のガタ角度A分だけ相対回転しようとするときには上記押圧力の上昇による摩擦力すなわち制動力の増加によってその回転が抑制される。したがって、車両の駆動状態と被駆動状態との間の切換時期において、案内機構46gに大きな衝撃荷重が発生することが抑制されるとともに、その耐久性或いは運転性の低下も抑制される。
【0057】
また、本実施例の車両用ベルト式無段変速機18の制御装置(CVTコントローラ80)によれば、(a) ガタ角度Aは、可動回転体46bが固定回転体46aに対して1回転方向R1へ回転させられたときに相対回転不能となる第1角度から、その可動回転体46bが固定回転体46aに対して他の回転方向R2へ回転させられたときに相対回転不能となる第2角度までの角度範囲であり、(b) 切換過渡時挟圧力制御手段128は、固定回転体46aおよび可動回転体46bがガタ角度A内にあるときに、伝動ベルト48に対する可動回転体46bからの挟圧力を一時的に上昇させるものであることから、そのガタ角度A内にあるときの挟圧力の上昇による摩擦力すなわち制動力の増加によって、可動回転体46bが固定回転体46aに対して所定のガタ角度A分だけ相対回転しようときのその回転が緩やかに抑制される。
【0058】
また、本実施例の車両用ベルト式無段変速機18の制御装置(CVTコントローラ80)によれば、(a) ベルト滑りを防止する上で必要な最低限の理論必要ベルト挟圧力に所定の安全率を考慮して決定されたベルト挟圧力が得られるように前記挟圧力アクチュエータの出力を制御するベルト挟圧力制御手段116を含み、(b) 前記切換過渡時挟圧力制御手段128は、車両の駆動状態および被駆動状態の一方から他方への切換えの切換期間には、安全率をその車両の駆動状態または被駆動状態における安全率SFよりも高い値(過渡補正後の安全率SF)に一時的に変更するものであることから、その安全率SFの高い値への変更によって挟圧力が上昇して摩擦力すなわち制動力が増加させられるので、可動回転体46bが固定回転体46aに対して所定のガタ角度A分だけ相対回転しようとしたときのその回転が緩やかに抑制される。
【0059】
また、本実施例の車両用ベルト式無段変速機18の制御装置(CVTコントローラ80)によれば、切換判定手段126は、入力軸36へ入力される入力トルクが正および負の一方から他方へ変化することに基づいて車両の駆動状態および被駆動状態の一方から他方への切換えを判定するものであることから、遅れなく車両の駆動状態および被駆動状態の一方から他方への切換が正確に判定される。
【0060】
また、本実施例の車両用ベルト式無段変速機18の制御装置(CVTコントローラ80)によれば、切換判定手段126は、入力軸36へ入力される入力トルクが零またはその近傍の値に設定された判定値を通過することに基づいて車両の駆動状態および被駆動状態の一方から他方への切換えを判定するものであることから、車両の駆動状態および被駆動状態の一方から他方への切換が容易に判定される。
【0061】
以上、本発明の実施例を図面に基づいて詳細に説明したが、これはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更,改良を加えた態様で実施することができる。
【図面の簡単な説明】
【0062】
【図1】本発明が適用された車両用駆動装置の骨子図である。
【図2】図1のベルト式無段変速機の出力側可変プーリの構成を説明する要部断面図である。
【図3】図2の出力側可変プーリにおいて、固定回転体と可動回転体との嵌合構造を拡大して説明する断面図である。
【図4】図6の変速制御回路の具体例を示す油圧回路図である。
【図5】図6の挟圧力制御回路の具体例を示す油圧回路図である。
【図6】図1の車両用駆動装置におけるベルト式無段変速機の制御系統を説明するブロック線図である。
【図7】図1の前後進切換装置のクラッチおよびブレーキを係合、開放する油圧回路の一例を示す図である。
【図8】図6のCVTコントローラが備えている制御機能の要部を説明する機能ブロック線図である。
【図9】図8の変速制御手段によって行われる変速制御において目標入力軸回転速度NINTを求める際に用いられる変速マップの一例を示す図である。
【図10】図8の理論必要油圧算出手段により理論必要油圧PBを算出するときに用いられる関係を示す図である。
【図11】図8推定入力トルク算出手段において推定入力トルクを算出する場合の補正の具体的内容を説明する図である。
【図12】図6のCVTコントローラによって車両の駆動走行時に実行される切換過渡時挟圧力制御におけるベルト挟圧力(過渡補正後の安全率SF)の変化タイミングおよび変化量を示す図である。
【図13】図6のCVTコントローラの制御作動の要部であって、駆動状態におけるベルト挟圧力制御作動を説明するフローチャートである。
【図14】図6のCVTコントローラによって車両の被駆動走行時に実行される切換過渡時挟圧力制御におけるベルト挟圧力(過渡補正後の安全率SF)の変化タイミングおよび変化量を示す図である。
【図15】図6のCVTコントローラの制御作動の要部であって、被駆動状態におけるベルト挟圧力制御作動を説明するフローチャートである。
【符号の説明】
【0063】
10:車両用駆動装置
12:エンジン(動力源、内燃機関)
18:ベルト式無段変速機
36:入力軸
42:入力側可変プーリ
42a:固定回転体
42b:可動回転体
42c:油圧シリンダ(アクチュエータ)
44:出力軸
46:出力側可変プーリ
46a:固定回転体
46b:可動回転体
46c:油圧シリンダ(アクチュエータ)
48:伝動ベルト
80:CVTコントローラ
116:挟圧力制御手段
126:切換判定手段
128:切換過渡時挟圧力制御手段
A:ガタ角度
【技術分野】
【0001】
本発明はベルト式無段変速機の制御装置に係り、特に、車両の駆動状態が変化したときに可動回転体の固定回転体に対する急激な相対回転を低減する技術に関するものである。
【背景技術】
【0002】
入力軸および出力軸と、固定回転体および可動回転体とその可動回転体をその固定回転体に対して所定のガタ角度を超える相対回転が不能な状態で回転軸心方向に案内する案内機構とをそれぞれ有して上記入力軸および出力軸に設けられた溝幅が可変の一対の可変プーリと、それら一対の可変プーリに巻き掛けられた伝動ベルトと、前記可動回転体と前記固定回転体との間で前記伝動ベルトを挟圧するための挟圧力をその可動回転体に付与する挟圧力アクチュエータとを備える車両用ベルト式無段変速機が知られている。そして、このような車両用ベルト式無段変速機では、前記プーリの溝幅を変化させて前記ベルト式無段変速機の変速比を制御する変速制御装置および前記プーリが前記伝動ベルトを挟圧するベルト挟圧力を制御する挟圧力制御装置によって変速比やベルト挟圧力が逐次制御されるようになっているのが普通である。特許文献1に記載の車両はその一例であり、油圧により変速比やベルト挟圧力が制御されるようになっているとともに、変速比が変化する変速期間には、所定の安全率を確保できるように車両の駆動状態における安全率と被駆動状態における安全率とを異なる値とすることにより、車両の駆動状態および被駆動状態において伝動ベルトの滑りを回避しつつベルト挟圧力を可及的に低くして燃費等のエネルギー損失を低減するようになっている。
【特許文献1】特開2001−330126号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、このような従来の車両用ベルト式無段変速機の制御装置においては、走行中のアクセル踏込操作および戻し操作等に関連して、動力源(エンジン)側から動力伝達径路を介して駆動輪を駆動する駆動状態と動力源側が動力伝達経路を介して駆動輪により回転駆動される被駆動状態との間で切換られる場合がある。しかしながら、可変プーリでは、案内機構によって可動回転体が固定回転体に対して所定のガタ角度を超える相対回転が不能な状態で回転軸心方向に案内されるように構成されているので、上記駆動状態と被駆動状態との間の切換時期では、可動回転体が固定回転体に対して所定のガタ角度分だけ急激に相対回転させられた後に、上記案内機構に大きな衝撃荷重が発生し、その耐久性或いは運転性が損なわれる可能性があった。
【0004】
本発明は以上の事情を背景として為されたもので、その目的とするところは、車両の駆動状態と被駆動状態との間の切り換えに際して可動回転体の相対回転を抑制することができる車両用ベルト式無段変速機の制御装置を提供することにある。
【課題を解決するための手段】
【0005】
かかる目的を達成するための請求項1に係る発明の要旨とするところは、(a) 入力軸および出力軸と、固定回転体および可動回転体とその可動回転体をその固定回転体に対して所定のガタ角度を超える相対回転が不能な状態で回転軸心方向に案内する案内機構とをそれぞれ有して前記入力軸および出力軸に設けられた溝幅が可変の一対の可変プーリと、それら一対の可変プーリに巻き掛けられた伝動ベルトと、前記可動回転体が前記固定回転体との間で前記伝動ベルトを挟圧する挟圧力を付与する挟圧力アクチュエータとを備える車両用ベルト式無段変速機の制御装置であって、(b) 車両の駆動状態および被駆動状態の一方から他方への切換えを判定する切換判定手段と、(c) その切換判定手段によって前記車両の駆動状態および被駆動状態の一方から他方への切換えが判定された場合には、前記伝動ベルトに対する前記可動回転体からの挟圧力を一時的に上昇させる切換過渡時挟圧力制御手段とを、含むことを特徴とする。
【0006】
また、請求項2に係る発明の要旨とするところは、請求項1に係る発明において、(a) 前記ガタ角度は、前記可動回転体が前記固定回転体に対して1回転方向へ回転させられたときに相対回転不能となる第1角度から、その可動回転体が固定回転体に対して他の回転方向へ回転させられたときに相対回転不能となる第2角度までの角度範囲であり、(b) 前記切換過渡時挟圧力制御手段は、前記固定回転体および可動回転体が前記ガタ角度内にあるときに、前記伝動ベルトに対する前記可動回転体からの挟圧力を一時的に上昇させるものであることを特徴とする。
【0007】
また、請求項3に係る発明の要旨とするところは、請求項1または2に係る発明において、(a) ベルト滑りを防止する上で必要な最低限の理論必要ベルト挟圧力に所定の安全率を考慮して決定されたベルト挟圧力が得られるように前記挟圧力アクチュエータの出力を制御するベルト挟圧力制御手段を含み、(b) 前記切換過渡時挟圧力制御手段は、前記車両の駆動状態および被駆動状態の一方から他方への切換えの切換期間には、前記安全率をその車両の駆動状態または被駆動状態における安全率よりも高い値に一時的に変更するものであることを特徴とする。
【0008】
また、請求項4に係る発明の要旨とするところは、請求項1乃至3のいずれかの発明において、前記切換判定手段は、前記入力軸へ入力される入力トルクが正および負の一方から他方へ変化することに基づいて前記車両の駆動状態および被駆動状態の一方から他方への切換えを判定するものであることを特徴とする。
【0009】
また、請求項5に係る発明の要旨とするところは、請求項1乃至3のいずれかの発明において、前記切換判定手段は、前記入力軸へ入力される入力トルクが零またはその近傍の値に設定された判定値を通過することに基づいて前記車両の駆動状態および被駆動状態の一方から他方への切換えを判定するものであることを特徴とする。
【発明の効果】
【0010】
請求項1に係る発明の車両用ベルト式無段変速機の制御装置によれば、(a) 車両の駆動状態および被駆動状態の一方から他方への切換えを判定する切換判定手段と、(c) その切換判定手段によって前記車両の駆動状態および被駆動状態の一方から他方への切換えが判定された場合には、前記伝動ベルトに対する前記可動回転体からの挟圧力を一時的に上昇させる切換過渡時挟圧力制御手段とが、含まれることから、車両の駆動状態と被駆動状態との間の切換時期では、可動回転体から伝動ベルトを介して固定回転体へ向かう押圧力が一時的に高められるので、可動回転体が固定回転体に対して所定のガタ角度分だけ相対回転しようとするときには上記押圧力の上昇による摩擦力すなわち制動力の増加によってその回転が抑制される。したがって、上記車両の駆動状態と被駆動状態との間の切換時期において、上記案内機構に大きな衝撃荷重が発生することが抑制されるとともに、その耐久性或いは運転性の低下も抑制される。
【0011】
また、請求項2に係る発明の車両用ベルト式無段変速機の制御装置によれば、(a) 前記ガタ角度は、前記可動回転体が前記固定回転体に対して1回転方向へ回転させられたときに相対回転不能となる第1角度から、その可動回転体が固定回転体に対して他の回転方向へ回転させられたときに相対回転不能となる第2角度までの角度範囲であり、(b) 前記切換過渡時挟圧力制御手段は、前記固定回転体および可動回転体が前記ガタ角度内にあるときに、前記伝動ベルトに対する前記可動回転体からの挟圧力を一時的に上昇させるものであることから、そのガタ角度内にあるときの挟圧力の上昇による摩擦力すなわち制動力の増加によって、可動回転体が固定回転体に対して所定のガタ角度分だけ相対回転しようときのその回転が緩やかに抑制される。
【0012】
また、請求項3に係る発明の車両用ベルト式無段変速機の制御装置によれば、(a) ベルト滑りを防止する上で必要な最低限の理論必要ベルト挟圧力に所定の安全率を考慮して決定されたベルト挟圧力が得られるように前記挟圧力アクチュエータの出力を制御するベルト挟圧力制御手段を含み、(b) 前記切換過渡時挟圧力制御手段は、前記車両の駆動状態および被駆動状態の一方から他方への切換えの切換期間には、前記安全率をその車両の駆動状態または被駆動状態における安全率よりも高い値に一時的に変更するものであることから、その安全率の高い値への変更によって挟圧力が上昇して摩擦力すなわち制動力が増加させられるので、可動回転体が固定回転体に対して所定のガタ角度分だけ相対回転しようとするときに制動力が大きくされてその回転が緩やかに抑制される。
【0013】
また、請求項4に係る発明の車両用ベルト式無段変速機の制御装置によれば、前記切換判定手段は、前記入力軸へ入力される入力トルクが正および負の一方から他方へ変化することに基づいて前記車両の駆動状態および被駆動状態の一方から他方への切換えを判定するものであることから、遅れなく車両の駆動状態および被駆動状態の一方から他方への切換が正確に判定される。
【0014】
また、請求項5に係る発明の車両用ベルト式無段変速機の制御装置によれば、前記切換判定手段は、前記入力軸へ入力される入力トルクが零またはその近傍の値に設定された判定値を通過することに基づいて前記車両の駆動状態および被駆動状態の一方から他方への切換えを判定するものであることから、車両の駆動状態および被駆動状態の一方から他方への切換が容易に判定される。
【0015】
ここで、好適には、前記車両用ベルト式無段変速機は、動力源と駆動輪との間の動力伝達経路に配設される。動力源としては、燃料の燃焼によって駆動力を発生するガソリンエンジンやディーゼルエンジンなどの内燃機関、或いは電気エネルギーで作動する電動モータなど、種々の動力源を採用できる。内燃機関および電動モータの両方を走行用の動力源として備えていても良い。
【0016】
また、好適には、ベルト式無段変速機の変速制御やベルト挟圧力の制御に用いられるアクチュエータは、例えば油圧シリンダによる油圧制御や電気モータによる電気制御で行うように構成され、変速比を制御する変速制御装置およびベルト挟圧力を制御する挟圧力制御装置は、油圧を制御する電磁開閉弁やリニアソレノイド弁などを含んで構成される。変速制御は、一対のプーリの何れか一方の油圧制御によって行われ、挟圧力制御は他方のプーリの油圧制御によって行われるが、一般には、変速制御は動力源側に位置する入力側可変プーリが用いられ、ベルト挟圧力の制御は駆動輪側に位置する出力側可変プーリが用いられる。その場合に、被駆動状態では入力側可変プーリの油圧がベルト挟圧に必要な油圧になるように出力側可変プーリの油圧を制御する必要があるため、例えば予め定められた推力比を用いて出力側可変プーリの油圧制御を行うことが望ましいが、推力比を高い精度で設定することは困難であるため、推力比のばらつきを考慮した安全率を用いることが望ましい。
【0017】
また、好適には、前記変速制御装置は、例えば目標変速比を求めて実際の変速比がその目標変速比になるように制御したり、目標入力軸回転速度を求めて実際の入力軸回転速度がその目標入力軸回転速度になるようにフィードバック制御したりするなど、種々の態様を採用できる。目標入力軸回転速度は目標変速比に対応し、必ずしも目標変速比そのものを求める必要はない。
【0018】
上記目標変速比、目標入力軸回転速度は、予め記憶されたするマップ(関係)や演算式から、例えばアクセル操作量などの運転者の出力要求量および車速(出力軸回転速度に対応)などの車両運転状態に基づいて逐次決定される。或いは、予め記憶された第1の関係から実際のアクセル操作量および車速に基づいて要求駆動力が決定された後、予め記憶された第2の関係から上記要求駆動力に基づいて上記目標変速比、目標入力軸回転速度が決定される。なお、常に自動的に変速比が制御される必要はなく、所定車速以上の走行中など一定の条件下で運転者が手動操作で任意に変速比を変更できるようになっていても良い。
【0019】
挟圧力制御装置は挟圧力制御手段を含むものであり、挟圧力制御手段は、例えば(a) ベルト式無段変速機に入力される推定入力トルクを算出する推定入力トルク算出手段と、(b) その推定入力トルクに基づいてベルト滑りを防止する上で必要な最低限の理論必要ベルト挟圧力を算出する理論挟圧力算出手段と、(c) ベルト滑りに関与する物理量の変化特性やばらつきに応じて安全率を算出する安全率算出手段と、(d) 理論必要ベルト挟圧力を基準にして安全率を加味して最終の必要ベルト挟圧力を算出する必要ベルト挟圧力算出手段と、を有して構成される。油圧制御でベルト挟圧力を制御する場合、上記理論挟圧力算出手段は、例えば理論必要油圧を算出する理論必要油圧算出手段にて構成され、必要ベルト挟圧力算出手段は、例えば必要油圧を算出する必要油圧算出手段にて構成される。
【0020】
上記推定入力トルク算出手段、理論挟圧力算出手段、および安全率算出手段は、必要に応じて駆動状態か被駆動状態かによって異なる演算処理を行うように構成される。例えば、推定入力トルク算出手段は、駆動状態では動力源フリクショントルクやオイルポンプ駆動トルク、エアコン駆動トルク、オルタネータ駆動トルクなどを減算する一方、被駆動状態ではそれ等のトルクを加算する。理論挟圧力算出手段は、例えば駆動状態で被駆動側のプーリの油圧でベルト挟圧力を制御ようにエンジン負荷および変速比に基づいて理論必要ベルト挟圧力(理論必要油圧)を算出し、被駆動状態ではさらに前記推力比を考慮して理論必要ベルト挟圧力(理論必要油圧)を算出する。安全率算出手段は、例えば駆動状態では動力源のトルク変動を安全率に反映させるが、被駆動状態ではそのトルク変動を安全率に反映させる必要はなく、被駆動状態では推力比のばらつきを安全率に反映させるが、推力比が必要ない駆動状態ではそのばらつきを安全率に反映させる必要はない。
【0021】
また、前記案内機構は、可動回転体を固定回転体に対して所定のガタ角度を超える相対回転が不能な状態で回転軸心方向に案内するものであり、たとえば、固定回転体或いはそれが固設された回転軸(出力軸)の外周面に周方向に一定の間隔を隔てて軸心方向に形成された複数本のスプライン歯と可動回転体の内周面に周方向に一定の間隔を隔てて軸心方向に形成された複数本のスプライン歯とが互いにかみ合った状態で嵌合されるスプライン嵌合機構から好適に構成される。しかし、案内機構は、固定回転体或いは回転軸の外周面に固定された軸心方向のキーと可動回転体の内周面にそのキーが嵌め入れられるように形成された軸心方向のキー溝とから構成されてもよいし、固定回転体或いは回転軸の外周面に周方向に一定の間隔を隔てて軸心方向に形成された複数本の内周側ボール溝と、可動回転体の内周面に周方向に一定の間隔を隔てて軸心方向に形成された複数本のと軸心方向に形成された外周側ボール溝と、それら内周側ボール溝および外周側ボール溝の間の空間にボールが嵌め入れられたボールスプライン機構から構成されてもよい。
【0022】
また、好適には、切換判定手段は、前記車両の駆動状態および被駆動状態の一方から他方への切換えを、アクセル操作量θACC が略0のアクセルOFF時にONになるように構成されたアイドル接点(スイッチ)がONからOFFへ、或いはOFFからONへ変化したことに基づいて判定する。しかし、切換判定手段は、推定エンジントルクTE、推定入力トルクTINT、トルクセンサにより検出される実際の入力軸トルクが零付近に設定された判定値を通過したことに基づいて、車両の駆動状態および被駆動状態の一方から他方への切換えを判定してもよい。上記切換判定は、トルク値付近に設定された判定値を推定エンジントルクTE、推定入力トルクTINT、実際の入力軸トルクが通過したことに基づいて実行されるが、応答時間を考慮して、上記よりも先立って判定できるようにトルク値が零よりも所定値だけずらされてもよい。
【0023】
また、好適には、切換判定手段は、エンジンとベルト式無段変速機の入力軸との間に設けられたダンパのねじれ、すなわちそのねじれにより許容されるエンジンのクランク軸と入力軸と相対回転角度が予め零値付近に設定された判定値を通過することに基づいて、車両の駆動状態および被駆動状態の一方から他方への切換えを判定してもよい。
【0024】
また、好適には、前記切換判定手段は、車両の駆動状態から被駆動状態への切換および被駆動状態から駆動状態への切換の一方のみを判定するものであってもよいし、両方を判定するものであってもよい。切換過渡時挟圧力制御手段は、車両の駆動状態から被駆動状態への切換および被駆動状態から駆動状態への切換の一方の切換えが判定された場合のみに伝動ベルトに対する前記可動回転体からの挟圧力を一時的に上昇させるものであってもよいし、両方の切換が判定された場合にそれぞれ伝動ベルトに対する前記可動回転体からの挟圧力を一時的に上昇させるものであってもよい。
【0025】
また、前記切換過渡時挟圧力制御手段は、固定回転体および可動回転体の相対回転位置がそれらのガタ角度内にあるときに可動回転体からの挟圧力を一時的に上昇させるが、そのガタ角度範囲内での相対回転期間の全部において挟圧力を一時的に上昇させてもよいが、そのガタ角度範囲の一部の角度すなわちガタ角度内にある時間帯のうちの一部の時間帯特に後半の時間帯において挟圧力を一時的に上昇させるものでもよい。
【発明を実施するための最良の形態】
【0026】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。
図1は、本発明が適用された車両用駆動装置10の骨子図である。この車両用駆動装置10は横置き型であり、FF(フロントエンジン・フロントドライブ)型車両に好適に採用されるものであり、走行用の動力源として用いられる内燃機関としてエンジン12を備えている。エンジン12の出力は、トルクコンバータ14から前後進切換装置16、ベルト式無段変速機(CVT)18、減速歯車20を介して差動歯車装置22に伝達され、左右の駆動輪24L、24Rへ分配される。
【0027】
エンジン12は、吸入空気量を電気的に調整する電気式スロットル弁30を備えており、運転者の出力要求量を表す図示しないアクセルペダルのアクセル操作量θACC などに応じてエンジンECU(電子制御ユニット)110(図8参照)により電気式スロットル弁30の開閉制御や燃料噴射制御等のエンジン出力制御が行われることにより、エンジン12の出力が増減制御される。また、エンジン12の吸気管31にはブレーキブースタ32が接続され、吸気管31内の負圧によってブレーキペダル33の踏込み操作力(ブレーキ力)を助勢するようになっている。
【0028】
トルクコンバータ14は、エンジン12のクランク軸に連結されたポンプ翼車14p、およびタービン軸34を介して前後進切換装置16に連結されたタービン翼車14tを備えており、流体を介して動力伝達を行うようになっている。また、それ等のポンプ翼車14pおよびタービン翼車14tの間にはロックアップクラッチ26が設けられ、それ等を一体的に連結して一体回転させることができるようになっている。上記ポンプ翼車14pには、ベルト式無段変速機18を変速制御したりベルト挟圧力を発生させたり、或いは各部に潤滑油を供給したりするための油圧を発生する機械式のオイルポンプ28が設けられている。
【0029】
前後進切換装置16は、ダブルピニオン型の遊星歯車装置にて構成されており、トルクコンバータ14のタービン軸34はサンギヤ16sに連結され、ベルト式無段変速機18の入力軸36はキャリア16cに連結されている。そして、キャリア16cとサンギヤ16sとの間に配設された直結クラッチ38が係合させられると、前後進切換装置16は一体回転させられてタービン軸34が入力軸36に直結され、前進方向の駆動力が駆動輪24R、24Lに伝達される。リングギヤ16rと非回転部材であるハウジング39との間に配設された反力ブレーキ40が係合させられるとともに上記直結クラッチ38が開放されると、入力軸36はタービン軸34に対して逆回転させられ、後進方向の駆動力が駆動輪24R、24Lに伝達される。また、直結クラッチ38および反力ブレーキ40が共に開放されると、エンジン12とベルト式無段変速機18との間の動力伝達が遮断される。直結クラッチ38および反力ブレーキ40は何れも油圧式摩擦係合装置である。
【0030】
ベルト式無段変速機18は、互いに平行な状態で回転可能に支持された入力軸36および出力軸44と、その入力軸36に設けられたV溝幅が可変の入力側可変プーリ42と、出力軸44に設けられたV溝幅が可変の出力側可変プーリ46と、それ等の可変プーリ42および46に巻き掛けられた伝動ベルト48とを備えており、可変プーリ42および46と伝動ベルト48との間の摩擦力を介して動力伝達が行われる。可変プーリ42および46は、V溝幅を変更するためのアクチュエータとして機能する油圧シリンダ42cおよび46cを備えて構成されており、入力側可変プーリ42の油圧シリンダ42cの油圧が変速制御回路50(図7参照)によって制御されることにより、両可変プーリ42および46のV溝幅が変化して伝動ベルト48の掛かり径(有効径)が変更され、変速比γ(=入力軸回転速度NIN/出力軸回転速度NOUT)が連続的に変化させられるようになっている。
【0031】
上記入力側可変プーリ42および出力側可変プーリ46は、入力軸36および出力軸44に固設された固定回転体42aおよび46a、それら固定回転体42aおよび46aとの間にV溝を形成する可動回転体42bおよび46bと、それら可動回転体42bおよび46bを固定回転体42aおよび46aに対して相対回転不能且つ回転軸心Cの方向に接近離隔可能に案内する案内機構42gおよび46gとを備えている。案内機構42gおよび46gは互いに同様に構成されているので、図2および図3では案内機構46gが代表して示されている。
【0032】
図2は出力側可変プーリ46を拡大して詳細に説明する図であり、図3はその図2のIII-III 視断面図である。出力軸44はベアリング44aおよび44bを介してハウジング39により回転可能に支持されており、その出力軸44には固定回転体46aが一体に設けられている。出力軸44の外周面と可動回転体46bの内周面には、互いに噛み合うスプライン歯44sおよび46sが周方向に多数設けられており、可動回転体46bが出力軸44或いは固定回転体46aに対して相対回転不能且つ回転軸心Cの方向の移動可能に設けられている。本実施例では、上記スプライン歯44sおよび46sにより案内機構46gが構成されている。油圧シリンダ46c内には可動回転体46bの外周端が摺動可能に嵌め入れられて油室が形成されている。
【0033】
ところで、スプライン歯44sおよび46sの間には摺動を円滑にすることなどのための加工公差や摺動摩耗などにより、上記可動回転体46bと出力軸44との間には所定の大きさの周方向のガタが存在し、そのガタの大きさを示すガタ角度寸法A(mm)或いはガタ角度A(°)は図3のように示される。すなわち、このガタ角度Aは、可動回転体46bが固定回転体46aに対して1回転方向R1へ回転させられたときにスプライン歯44sがスプライン歯46sの一方の歯面F1に当接して相対回転不能となる第1角度(図3に示される第1状態)から、その可動回転体46bが固定回転体46aに対して他の回転方向R2へ回転させられたときにスプライン歯44sがスプライン歯46sの他方の歯面F2に当接して相対回転不能となる第2角度(第2状態)までの角度範囲である。このため、可動回転体46bは、出力軸44或いは固定回転体46aに対して相対回転不能に嵌合されているとは言っても、実際には、その所定のガタ角度Aを超える相対回転が不能な状態で出力軸44或いは固定回転体46aに嵌合されている。したがって、車両の動力伝達方向が切換られた時には、ベルト挟圧力が維持されていても伝動ベルト48は固定回転体46aとの間の摩擦だけとなるので、可動回転体46bが上記ガタ角度Aだけ急激に移動させられてスプライン歯44sがスプライン歯46sの一方の歯面F1から反対側の他方の歯面F2に突き当たるので、構造的には比較的大きな衝撃荷重が発生する可能性が存在していた。
【0034】
図4は、前記変速制御回路50の一例であり、変速比γを小さくするアップシフト用の電磁開閉弁52および流量制御弁54と、変速比γを大きくするダウンシフト用の電磁開閉弁56および流量制御弁58とを備えている。そして、アップシフト用の電磁開閉弁52がCVTコントローラ80(図6参照)によりデューティ制御されると、モジュレータ圧PMを減圧した所定の制御圧PVUが流量制御弁54に出力され、その制御圧PVUに対応して調圧されたライン圧PLが供給路60から入力側可変プーリ42の油圧シリンダに供給されることにより、そのV溝幅が狭くなって変速比γが小さくなる。また、ダウンシフト用の電磁開閉弁56がCVTコントローラ80によりデューティ制御されると、モジュレータ圧PMを減圧した所定の制御圧PVDが流量制御弁58に出力され、その制御圧PVDに対応してドレーンポート58dが開かれることにより、入力側可変プーリ42内の作動油が排出路62から所定の流量でドレーンされてV溝幅が広くなり、変速比γが大きくなる。なお、変速比γが略一定で入力側可変プーリ42に対する作動油の供給が必要ない場合でも、油漏れによる変速比変化を防止するため、流量制御弁54は所定の流通断面積でライン油路64と供給路60とを連通させ、所定の油圧を作用させるようになっている。
【0035】
また、出力側可変プーリ46の油圧シリンダ46c内の油圧は、伝動ベルト48が滑りを生じないように、挟圧力制御回路70(図6参照)により調圧制御される。図5は、挟圧力制御回路70の一例であり、前記オイルポンプ28によりオイルタンク72から汲み上げられた作動油は、リニアソレノイド弁74に供給されるとともに、挟圧力制御弁76を経て出力側可変プーリ46の油圧シリンダに供給される。リニアソレノイド弁74は、CVTコントローラ80によって励磁電流が連続的に制御されることにより、オイルポンプ28から供給された作動油の油圧を連続的に調圧して、制御圧PS を挟圧力制御弁76に出力するもので、挟圧力制御弁76から出力側可変プーリ46の油圧シリンダに供給される作動油の油圧PO は、制御圧PS が高くなるに従って上昇させられ、それに伴ってベルト挟圧力すなわち可変プーリ42および46と伝動ベルト48との間の摩擦力が増大させられる。
【0036】
リニアソレノイド弁74にはまた、カットバック弁78のON時に制御圧PS がフィードバック室74aに供給される一方、カットバック弁78のOFF時には、その制御圧PS の供給が遮断されてフィードバック室74aが大気に開放されるようになっており、カットバック弁78のON時にはOFF時よりも制御圧PS 、更には油圧PO の特性が低圧側へ切り換えられる。カットバック弁78は、前記トルクコンバータ14のロックアップクラッチ26のON(係合)時に、図示しない電磁弁から信号圧PONが供給されることによりONに切り換えられるようになっている。
【0037】
図6は、本実施例の電気的構成の要部を示している。図6において、CVTコントローラ80は、所謂マイクロコンピュータを含んで構成されており、RAMの一時記憶機能を利用しつつROMに予め記憶されたプログラムに従ってCPUが信号処理を行うことにより、上記ベルト式無段変速機18の変速制御や挟圧力制御を行う電子制御装置である。CVTコントローラ80には、シフトポジションセンサ82、アクセル操作量センサ84、エンジン回転速度センサ86、出力軸回転速度センサ88、入力軸回転速度センサ90、タービン回転速度センサ92、油温センサ94、油圧センサ96などから、それぞれシフトレバー98(図7参照)のシフトポジションSFTP、アクセルペダルの操作量θACC 、エンジン回転速度NE、出力軸回転速度NOUT(車速Vに対応)、入力軸回転速度NIN、タービン回転速度NT、ベルト式無段変速機18の油圧回路の油温TO 、出力側可変プーリ46の油圧PO などを表す信号が供給されるようになっている。
【0038】
シフトレバー98は運転者によって選択操作される手動操作装置であり、シフトポジションSFTPとして前進走行用のDレンジ、後進走行用のRレンジ、動力伝達を遮断するNレンジ、駐車用のPレンジを備えている。そして、そのシフトレバー98には図7に示すマニュアルシフトバルブ100がケーブル等を介して接続されており、そのマニュアルシフトバルブ100により油路が切り換えられることにより、Dレンジでは前記前後進切換装置16の反力ブレーキ40が開放されるとともに直結クラッチ38が係合させられ、Rレンジでは直結クラッチ38が開放されるとともに反力ブレーキ40が係合させられ、NレンジおよびPレンジでは直結クラッチ38および反力ブレーキ40が共に開放される。反力ブレーキ40には、マニュアルシフトバルブ100からリバースコントロールバルブ102を経て作動油が供給されるようになっており、リバースコントロールバルブ102は、シフトレバー98がRレンジへ操作され時だけ信号圧PR の供給が停止されてON状態になり、反力ブレーキ40への作動油の供給が許容されるようになっている。また、直結クラッチ38および反力ブレーキ40には、それぞれアキュムレータ104、106が接続され、N→DシフトやN→Rシフトでそれ等の直結クラッチ38や反力ブレーキ40が係合させられて駆動輪24L、24Rへ駆動力が伝達される際のシフトショックが軽減されるようになっている。なお、Pレンジでは、図示しないメカニカルパーキングロック機構により駆動輪24R、24Lの回転が機械的に阻止されるようになっている。
【0039】
前記CVTコントローラ80にはまたエンジンECU(電子制御ユニット)110が接続され、ベルト式無段変速機18の変速制御やベルト挟圧力の制御に必要な各種の情報、例えばエンジン12の吸入空気量Q、エンジン水温THW、オルタネータの電気負荷ELS、アクセルOFFのコースト走行時にエンジン12に対する燃料供給を停止するフューエルカットの有無、減筒運転の有無、エアコンのON・OFF、ロックアップクラッチ26のON・OFF、などに関する信号が供給されるようになっている。
【0040】
図8は、CVTコントローラ80の制御機能の要部を説明する機能ブロック線図である。図8に示すように、CVTコントローラ80には、変速制御手段112、入力状態判断手段114、挟圧力制御手段116を備えており、挟圧力制御手段116は更に推定入力トルク算出手段118、理論必要油圧算出手段120、安全率算出手段122、必要油圧算出手段124、切換判定手段126、切換過渡時挟圧力制御手段128が備えられている。
【0041】
変速制御手段112は、たとえば図9に示すように運転者の出力要求量を表すアクセル操作量θACC および車速V(出力軸回転速度NOUTに対応)をパラメータとして予め定められ且つ記憶された変速マップから実際のアクセル操作量θACC および車速Vに基づいて目標入力軸回転速度NINTを算出し、実際の入力軸回転速度NINが目標入力軸回転速度NINTと一致するように、それ等の偏差に応じてベルト式無段変速機18の変速制御、具体的には変速制御回路50の電磁開閉弁52、56をフィードバック制御して、入力側可変プーリ42の油圧シリンダに対する作動油の供給、排出を制御する。図9のマップは変速条件に相当するもので、車速Vが小さくアクセル操作量θACC が大きい程大きな変速比γになる目標入力軸回転速度NINTが設定されるようになっている。また、車速Vは出力軸回転速度NOUTに対応するため、入力軸回転速度NINの目標値である目標入力軸回転速度NINTは目標変速比に対応し、ベルト式無段変速機18の最小変速比γmin と最大変速比γmax の範囲内で定められている。上記変速マップは、CVTコントローラ80のマップ記憶装置(ROMなど)130に予め記憶されている。
【0042】
入力状態判断手段114および挟圧力制御手段116は、エンジン12側から駆動輪24L、24R側へ動力が伝達される駆動状態か、駆動輪24L、24R側からエンジン12側へ動力が伝達される被駆動状態(エンジンブレーキ状態)か、断続装置としての直結クラッチ38および反力ブレーキ40が共に開放されている遮断状態かに場合分けしてベルト挟圧力すなわち出力側可変プーリ46の油圧PO を制御するためのものである。
【0043】
入力状態判断手段114は、シフトポジションSFTPがNまたはPレンジか否か、すなわち直結クラッチ38および反力ブレーキ40が共に開放された遮断状態か否かを判断する。NまたはPレンジでない場合はアイドル接点がONか否かを判断する。アイドル接点は前記アクセル操作量センサ84に内蔵されており、アクセル操作量θACC が略0のアクセルOFF時にONになるように構成されているので、アイドル接点がOFFの場合は通常は駆動状態であり、アイドル接点がONの場合は通常は被駆動状態であるが、入力状態判断手段114は更にフューエルカットの有無を判断する。
【0044】
挟圧力制御手段116は、NまたはPレンジの場合は遮断状態の挟圧力制御を実行し、アイドル接点がOFFの場合は駆動状態の挟圧力制御を実行し、アイドル接点がONであり且つフューエルカット時にはフューエルカットON被駆動状態の挟圧力制御を実行し、フューエルカットが実施されていない場合はフューエルカットOFF被駆動状態の挟圧力制御を実行する。
【0045】
上記挟圧力制御手段116に含まれる推定入力トルク算出手段118は、たとえば吸入空気量Qまたはアクセル操作量θACC およびエンジン回転速度NEに基づいて、予め設定されたマップや演算式に従って推定エンジントルクTEを算出する。但し、被駆動状態では正確に算出できないため、エンジン12のポンプ作用による推定エンジントルクTEをフューエルカットの有無などに応じて予めマップなどで設定しておく。次いで、トルクコンバータ14の速度比e(=出力回転速度/入力回転速度)に基づいて、予め設定されたマップや演算式に従ってトルク比を算出し、上記推定エンジントルクTEに掛算するとともに、必要に応じて補機分を補正することにより、推定入力トルクTINTを算出する。
【0046】
上記挟圧力制御手段116に含まれる理論必要油圧算出手段120は、上記推定入力トルクTINTに基づいて理論必要油圧PBを算出する。この理論必要油圧PBは、理論必要ベルト挟圧力に対応するものであってベルト滑りを防止できる最低必要油圧である。駆動状態の場合は、入力側可変プーリ42のベルト掛かり径Rを用い、たとえば次式(1) に従って基本的に求める。Kはプーリ面積や摩擦係数などのハード諸元、オイル密度などによって定まる係数で、ベルト掛かり径Rは変速比γから求めることができる。図10は、推定入力トルクTINT、変速比γ、および理論必要油圧PBの関係を示す概略図である。被駆動状態の場合は、入力側可変プーリ42側のベルト挟圧力を適切に制御する必要があるため、出力側可変プーリ46と入力側可変プーリ42との推力比αを予め定められたマップや演算式から求め、入力側可変プーリ42側で所定のベルト挟圧力が得られる出力側可変プーリ46の理論必要油圧PBを次式(2) に従って算出する。推力比αを求めるマップや演算式は、予め実験などにより変速比γをパラメータとして設定されており、前記マップ記憶装置130に記憶されている。
【0047】
PB=K×(TINT/R) ・・・(1)
PB=K×α×(TINT/R) ・・・(2)
【0048】
上記挟圧力制御手段116に含まれる安全率算出手段122は、安全率SFを例えば図11に示すように駆動状態か被駆動状態かによってそれぞれ算出する。安全率SFは、ベルト滑りに関与する物理量の変化特性やばらつきに拘らずベルト滑りが生じないように、前記理論必要油圧PBに掛算されるもので、1.0を基準にして所定の安全係数をそれぞれ加算して求める。具体的には、駆動状態の場合は、エンジントルクの変動に関する安全係数SF1 、エンジン12のフリクショントルクのばらつきに関する安全係数SF2 、伝動ベルト48と可変プーリ42、46との間の摩擦係数のばらつきと温度特性に関する安全係数SF3 、悪路や段差乗り越え時等の路面からの逆入力に関する安全係数SF4 、をそれぞれ1.0に加算して安全率SFを求める。また、被駆動状態の場合は、前記推力比αのばらつきに関する安全係数SF5 を加算して安全率SFを算出する。図11の「○」は安全率SFに反映されることを意味し、「×」は安全率SFに反映されないことを意味し、「△」は、場合によって反映されることを意味する。
【0049】
上記挟圧力制御手段116に含まれる必要油圧算出手段124は、理論必要油圧PBに安全率SFを掛算して、必要油圧PBTを算出し、出力側可変プーリ46の油圧PO が必要油圧PBTになるように、挟圧力制御回路70のリニアソレノイド弁74に対する励磁電流を制御する。
【0050】
切換判定手段126は、車両の前進走行中においてエンジン12からタービン軸34或いはベルト式無段変速機18の入力軸36へ入力される実際の入力トルクTIN或いは前記推定入力トルクTINTが正および負の一方から他方へ変化することに基づいて、たとえばアイドル接点がOFFおよびONの一方から他方へ変化したことに基づいて、車両の駆動状態および被駆動状態の一方から他方への切換えを判定する。
【0051】
切換過渡時挟圧力制御手段128は、上記切換判定手段126によって車両の駆動状態および被駆動状態の一方から他方への切換えが判定された場合には、挟圧力制御手段116に伝動ベルト48に対する可動回転体46bからの挟圧力を所定値だけ一時的に上昇させる。この挟圧力の一時的な上昇は、必要油圧算出手段124において用いられる安全率SFを、上記挟圧力の上昇分に対応する過渡補正値ΔSFを加えたり過渡補正係数K(>1)を乗算したりして、たとえば図12に示すように、通常の駆動状態または被駆動状態における安全率よりも高い値に過渡時補正後の安全率SFに変更することにより実現される。上記挟圧力の上昇分は、固定回転体46aおよび可動回転体46bがガタ角度A内にあるときに発生させられる。また、上記挟圧力の上昇分は、固定回転体46aに対して相対回転可能なガタ角度A内の可動回転体46bに充分な大きさの回転方向の制動力を与えることができる値に設定される。図12は駆動状態から被駆動状態への切換時における挟圧力(過渡補正後の安全率SF)の変化タイミングおよび変化量を示し、図14は被駆動状態から駆動状態への切換時における挟圧力(過渡補正後の安全率SF)の変化タイミングおよび変化量を示している。
【0052】
図13および図15は前記CVTコントローラ80の制御作動の要部を説明するフローチャートであり、図13は車両が駆動走行状態において実行されるベルト挟圧力制御を、図15は車両が被駆動走行状態において実行されるベルト挟圧力制御を示している。
【0053】
図13において、前記切換判定手段126に対応するステップ(以下、ステップを省略する)SA1では、入力トルクTINが判定値(零)以上の値であるか否かすなわち車両の走行が駆動状態であるか否かが判断される。このSA1の判断が肯定される場合は、車両の駆動状態であるので、前記挟圧力制御手段116に対応するSA2において、通常のベルト挟圧力制御すなわち正駆動走行状態における前述のベルト挟圧力制御が実行される。しかし、SA1の判断が否定される場合は、車両が駆動状態から被駆動状態に切換られたときであるので、前記切換過渡時挟圧力制御手段128に対応するSA3において、図12に示すように、ベルト挟圧力(過渡補正後の安全率SF)が一時的に増加させられる。
【0054】
図15において、前記切換判定手段126に対応するステップSB1では、入力トルクTINが判定値(零)未満の値であるか否かすなわち車両の走行が被駆動状態であるか否かが判断される。このSB1の判断が否定される場合は、車両の被駆動状態であるので、前記挟圧力制御手段116に対応するSB2において、通常のベルト挟圧力制御すなわち被駆動走行状態における前述のベルト挟圧力制御が実行される。しかし、SB1の判断が肯定される場合は、車両が被駆動状態から駆動状態に切換られたときであるので、前記切換過渡時挟圧力制御手段128に対応するSB3において、図14に示すように、ベルト挟圧力(過渡補正後の安全率SF)が一時的に増加させられる。
【0055】
上記のように、車両が駆動状態から被駆動状態に切換られたとき或いは車両が被駆動状態から駆動状態に切換られたときは、その切換に伴って、前記ガタ角度Aに相当する移動ストロークで可動回転体46bが出力軸44に対して相対回転するが、図12或いは図14に示すように駆動方向の切換開始時に所定値だけ急速に上昇させられてから駆動方向の切換わり後に徐々に通常値に向かって緩やかに復帰させられることにより、ベルト挟圧力(過渡補正後の安全率SF)が一時的に増加させられるので、可動回転体46bと共に移動する伝動ベルト48と固定回転体46aとの間の摩擦が大きくされて制動力が大きくされる。これにより、上記の可動回転体46bの固定回転体46aに対する相対移動(回転)が緩やかとされるので、上記移動ストロークの終了時の衝撃の発生が緩和される。
【0056】
上述のように、本実施例の車両用ベルト式無段変速機18の制御装置(CVTコントローラ80)によれば、(a) 車両の駆動状態および被駆動状態の一方から他方への切換えを判定する切換判定手段126と、(c) その切換判定手段126によって車両の駆動状態および被駆動状態の一方から他方への切換えが判定された場合には、伝動ベルト48に対する可動回転体46bからの挟圧力を一時的に上昇させる切換過渡時挟圧力制御手段128とが、含まれることから、車両の駆動状態と被駆動状態との間の切換時期では、可動回転体46bから伝動ベルト48を介して固定回転体46aへ向かう押圧力が一時的に高められるので、可動回転体46bが固定回転体46aに対して所定のガタ角度A分だけ相対回転しようとするときには上記押圧力の上昇による摩擦力すなわち制動力の増加によってその回転が抑制される。したがって、車両の駆動状態と被駆動状態との間の切換時期において、案内機構46gに大きな衝撃荷重が発生することが抑制されるとともに、その耐久性或いは運転性の低下も抑制される。
【0057】
また、本実施例の車両用ベルト式無段変速機18の制御装置(CVTコントローラ80)によれば、(a) ガタ角度Aは、可動回転体46bが固定回転体46aに対して1回転方向R1へ回転させられたときに相対回転不能となる第1角度から、その可動回転体46bが固定回転体46aに対して他の回転方向R2へ回転させられたときに相対回転不能となる第2角度までの角度範囲であり、(b) 切換過渡時挟圧力制御手段128は、固定回転体46aおよび可動回転体46bがガタ角度A内にあるときに、伝動ベルト48に対する可動回転体46bからの挟圧力を一時的に上昇させるものであることから、そのガタ角度A内にあるときの挟圧力の上昇による摩擦力すなわち制動力の増加によって、可動回転体46bが固定回転体46aに対して所定のガタ角度A分だけ相対回転しようときのその回転が緩やかに抑制される。
【0058】
また、本実施例の車両用ベルト式無段変速機18の制御装置(CVTコントローラ80)によれば、(a) ベルト滑りを防止する上で必要な最低限の理論必要ベルト挟圧力に所定の安全率を考慮して決定されたベルト挟圧力が得られるように前記挟圧力アクチュエータの出力を制御するベルト挟圧力制御手段116を含み、(b) 前記切換過渡時挟圧力制御手段128は、車両の駆動状態および被駆動状態の一方から他方への切換えの切換期間には、安全率をその車両の駆動状態または被駆動状態における安全率SFよりも高い値(過渡補正後の安全率SF)に一時的に変更するものであることから、その安全率SFの高い値への変更によって挟圧力が上昇して摩擦力すなわち制動力が増加させられるので、可動回転体46bが固定回転体46aに対して所定のガタ角度A分だけ相対回転しようとしたときのその回転が緩やかに抑制される。
【0059】
また、本実施例の車両用ベルト式無段変速機18の制御装置(CVTコントローラ80)によれば、切換判定手段126は、入力軸36へ入力される入力トルクが正および負の一方から他方へ変化することに基づいて車両の駆動状態および被駆動状態の一方から他方への切換えを判定するものであることから、遅れなく車両の駆動状態および被駆動状態の一方から他方への切換が正確に判定される。
【0060】
また、本実施例の車両用ベルト式無段変速機18の制御装置(CVTコントローラ80)によれば、切換判定手段126は、入力軸36へ入力される入力トルクが零またはその近傍の値に設定された判定値を通過することに基づいて車両の駆動状態および被駆動状態の一方から他方への切換えを判定するものであることから、車両の駆動状態および被駆動状態の一方から他方への切換が容易に判定される。
【0061】
以上、本発明の実施例を図面に基づいて詳細に説明したが、これはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更,改良を加えた態様で実施することができる。
【図面の簡単な説明】
【0062】
【図1】本発明が適用された車両用駆動装置の骨子図である。
【図2】図1のベルト式無段変速機の出力側可変プーリの構成を説明する要部断面図である。
【図3】図2の出力側可変プーリにおいて、固定回転体と可動回転体との嵌合構造を拡大して説明する断面図である。
【図4】図6の変速制御回路の具体例を示す油圧回路図である。
【図5】図6の挟圧力制御回路の具体例を示す油圧回路図である。
【図6】図1の車両用駆動装置におけるベルト式無段変速機の制御系統を説明するブロック線図である。
【図7】図1の前後進切換装置のクラッチおよびブレーキを係合、開放する油圧回路の一例を示す図である。
【図8】図6のCVTコントローラが備えている制御機能の要部を説明する機能ブロック線図である。
【図9】図8の変速制御手段によって行われる変速制御において目標入力軸回転速度NINTを求める際に用いられる変速マップの一例を示す図である。
【図10】図8の理論必要油圧算出手段により理論必要油圧PBを算出するときに用いられる関係を示す図である。
【図11】図8推定入力トルク算出手段において推定入力トルクを算出する場合の補正の具体的内容を説明する図である。
【図12】図6のCVTコントローラによって車両の駆動走行時に実行される切換過渡時挟圧力制御におけるベルト挟圧力(過渡補正後の安全率SF)の変化タイミングおよび変化量を示す図である。
【図13】図6のCVTコントローラの制御作動の要部であって、駆動状態におけるベルト挟圧力制御作動を説明するフローチャートである。
【図14】図6のCVTコントローラによって車両の被駆動走行時に実行される切換過渡時挟圧力制御におけるベルト挟圧力(過渡補正後の安全率SF)の変化タイミングおよび変化量を示す図である。
【図15】図6のCVTコントローラの制御作動の要部であって、被駆動状態におけるベルト挟圧力制御作動を説明するフローチャートである。
【符号の説明】
【0063】
10:車両用駆動装置
12:エンジン(動力源、内燃機関)
18:ベルト式無段変速機
36:入力軸
42:入力側可変プーリ
42a:固定回転体
42b:可動回転体
42c:油圧シリンダ(アクチュエータ)
44:出力軸
46:出力側可変プーリ
46a:固定回転体
46b:可動回転体
46c:油圧シリンダ(アクチュエータ)
48:伝動ベルト
80:CVTコントローラ
116:挟圧力制御手段
126:切換判定手段
128:切換過渡時挟圧力制御手段
A:ガタ角度
【特許請求の範囲】
【請求項1】
入力軸および出力軸と、固定回転体および可動回転体と該可動回転体を該固定回転体に対して所定のガタ角度を超える相対回転が不能な状態で回転軸心方向に案内する案内機構とをそれぞれ有して前記入力軸および出力軸に設けられた溝幅が可変の一対の可変プーリと、該一対の可変プーリに巻き掛けられた伝動ベルトと、前記可動回転体が前記固定回転体との間で前記伝動ベルトを挟圧する挟圧力を付与する挟圧力アクチュエータとを備える車両用ベルト式無段変速機の制御装置であって、
車両の駆動状態および被駆動状態の一方から他方への切換えを判定する切換判定手段と、
該切換判定手段によって前記車両の駆動状態および被駆動状態の一方から他方への切換えが判定された場合には、前記伝動ベルトに対する前記可動回転体からの挟圧力を一時的に上昇させる切換過渡時挟圧力制御手段と
を、含むことを特徴とする車両用ベルト式無段変速機の制御装置。
【請求項2】
前記ガタ角度は、前記可動回転体が前記固定回転体に対して1回転方向へ回転させられたときに相対回転不能となる第1角度から、該可動回転体が前記固定回転体に対して他の回転方向へ回転させられたときに相対回転不能となる第2角度までの角度範囲であり、
前記切換過渡時挟圧力制御手段は、前記固定回転体および可動回転体が前記ガタ角度内にあるときに、前記伝動ベルトに対する前記可動回転体からの挟圧力を一時的に上昇させるものであることを特徴とする請求項1に記載の車両用ベルト式無段変速機の制御装置。
【請求項3】
ベルト滑りを防止する上で必要な最低限の理論必要ベルト挟圧力に所定の安全率を考慮して決定されたベルト挟圧力が得られるように前記挟圧力アクチュエータの出力を制御するベルト挟圧力制御手段を含み、
前記切換過渡時挟圧力制御手段は、前記車両の駆動状態および被駆動状態の一方から他方への切換えの切換期間には、前記安全率を該車両の駆動状態または被駆動状態における安全率よりも高い値に一時的に変更するものであることを特徴とする請求項1または2に記載の車両用ベルト式無段変速機の制御装置。
【請求項4】
前記切換判定手段は、前記入力軸へ入力される入力トルクが正および負の一方から他方へ変化することに基づいて前記車両の駆動状態および被駆動状態の一方から他方への切換えを判定するものである請求項1乃至3のいずれかの車両用ベルト式無段変速機の制御装置。
【請求項5】
前記切換判定手段は、前記入力軸へ入力される入力トルクが零またはその近傍の値に設定された判定値を通過することに基づいて前記車両の駆動状態および被駆動状態の一方から他方への切換えを判定するものである請求項1乃至3のいずれかの車両用ベルト式無段変速機の制御装置。
【請求項1】
入力軸および出力軸と、固定回転体および可動回転体と該可動回転体を該固定回転体に対して所定のガタ角度を超える相対回転が不能な状態で回転軸心方向に案内する案内機構とをそれぞれ有して前記入力軸および出力軸に設けられた溝幅が可変の一対の可変プーリと、該一対の可変プーリに巻き掛けられた伝動ベルトと、前記可動回転体が前記固定回転体との間で前記伝動ベルトを挟圧する挟圧力を付与する挟圧力アクチュエータとを備える車両用ベルト式無段変速機の制御装置であって、
車両の駆動状態および被駆動状態の一方から他方への切換えを判定する切換判定手段と、
該切換判定手段によって前記車両の駆動状態および被駆動状態の一方から他方への切換えが判定された場合には、前記伝動ベルトに対する前記可動回転体からの挟圧力を一時的に上昇させる切換過渡時挟圧力制御手段と
を、含むことを特徴とする車両用ベルト式無段変速機の制御装置。
【請求項2】
前記ガタ角度は、前記可動回転体が前記固定回転体に対して1回転方向へ回転させられたときに相対回転不能となる第1角度から、該可動回転体が前記固定回転体に対して他の回転方向へ回転させられたときに相対回転不能となる第2角度までの角度範囲であり、
前記切換過渡時挟圧力制御手段は、前記固定回転体および可動回転体が前記ガタ角度内にあるときに、前記伝動ベルトに対する前記可動回転体からの挟圧力を一時的に上昇させるものであることを特徴とする請求項1に記載の車両用ベルト式無段変速機の制御装置。
【請求項3】
ベルト滑りを防止する上で必要な最低限の理論必要ベルト挟圧力に所定の安全率を考慮して決定されたベルト挟圧力が得られるように前記挟圧力アクチュエータの出力を制御するベルト挟圧力制御手段を含み、
前記切換過渡時挟圧力制御手段は、前記車両の駆動状態および被駆動状態の一方から他方への切換えの切換期間には、前記安全率を該車両の駆動状態または被駆動状態における安全率よりも高い値に一時的に変更するものであることを特徴とする請求項1または2に記載の車両用ベルト式無段変速機の制御装置。
【請求項4】
前記切換判定手段は、前記入力軸へ入力される入力トルクが正および負の一方から他方へ変化することに基づいて前記車両の駆動状態および被駆動状態の一方から他方への切換えを判定するものである請求項1乃至3のいずれかの車両用ベルト式無段変速機の制御装置。
【請求項5】
前記切換判定手段は、前記入力軸へ入力される入力トルクが零またはその近傍の値に設定された判定値を通過することに基づいて前記車両の駆動状態および被駆動状態の一方から他方への切換えを判定するものである請求項1乃至3のいずれかの車両用ベルト式無段変速機の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2007−285333(P2007−285333A)
【公開日】平成19年11月1日(2007.11.1)
【国際特許分類】
【出願番号】特願2006−110421(P2006−110421)
【出願日】平成18年4月13日(2006.4.13)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成19年11月1日(2007.11.1)
【国際特許分類】
【出願日】平成18年4月13日(2006.4.13)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]